Faculdade Engenharia da
Universidade do Porto
Mestrado Engenharia Biomédica
MONOGRAFIA
Segmentação de Estruturas em
Imagens da Cavidade Pélvica
da Mulher
Mauro Miguel Parreira Vaz Trindade
Porto, 11 Julho 2008
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Segmentação de Estruturas em
Imagens da Cavidade Pélvica
da Mulher
Por:
Mauro Miguel Parreira Vaz Trindade
Licenciado em Engenharia Física pela
Faculdade de Ciências e Tecnologia – Universidade Nova de Lisboa (2004)
Orientador:
João Manuel R. S. Tavares
Professor Auxiliar da Faculdade de Engenharia da Universidade do Porto,
Departamento de Engenharia Mecânica e Gestão Industrial
Co-orientador:
Renato M. Natal Jorge
Professor Auxiliar da Faculdade de Engenharia da Universidade do Porto,
Departamento de Engenharia Mecânica e Gestão Industrial
2
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Resumo:
A Visão Computacional é uma das áreas da ciência que tem merecido maior
destaque por parte da comunidade científica. Este interesse deve-se ao seu alargado
leque de áreas de aplicação entre os quais se encontra a Medicina, onde a segmentação
automática de estruturas anatómicas em imagens médicas, significa uma rentabilização
de tempo e recursos dos profissionais de saúde envolvidos.
A segmentação de imagens é o processo de dividir uma imagem em sub-regiões
homogéneas. Por homogeneidade, entende-se em conformidade de algumas
características: como a cor, ou níveis de cinzento. O processo de segmentação pode ser
realizado de forma manual, semi-automática ou automática.
Os referidos processos de segmentação podem ser realizados em imagens
estáticas ou mesmo ao longo de sequências de imagem e muitas vezes constituem o
primeiro passo de metodologias de Visão Computacional mais complexas. Por exemplo,
na área da imagem médica, é comum a reconstrução 3D de estruturas representadas em
imagens, sendo usual a primeira etapa consistir na segmentação da estrutura em estudo
em cada imagem que constitui o exame médico em questão.
Com esta Monografia pretendeu-se estudar metodologias usuais na área da
Visão Computacional para segmentar objectos representados em imagens médicas, de
forma semi-automática ou mesmo totalmente automática, tendo como objectivo
principal a sua aplicação para segmentar estruturas em imagens da cavidade pélvica da
mulher.
Como algumas das estruturas da cavidade pélvica da mulher são de espessura
reduzida, especial atenção será dada a técnicas de segmentação de objectos de espessura
diminuta.
O motivo pelo qual a cavidade pélvica da mulher merecer principal destaque
nesta Monografia, deve-se ao facto de ainda não serem comuns técnicas computacionais
adequadas para segmentar as estruturas presentes nas imagens desta zona anatómica do
corpo humano.
Palavras-Chave: Visão Computacional, Segmentação, Modelos Activos, Cavidade
Pélvica da Mulher, Biomecânica.
3
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Índice
Capitulo I
7 Introdução à Dissertação e sua Organização
7 1.1 Introdução
8 1.2 Objectivos
11 1.3 – Metodologia
11 1.4 – Estrutura
11 Capitulo II
13 Anatomia – Zona Pélvica da Mulher
13 2.1 Introdução
14 2.2- Anatomia – Zona Pélvica da Mulher
14 2.2.1 Útero
16 2.2.2 Vagina
17 2.2.3 Bexiga
17 2.2.4 Uretra Feminina
17 2.2.5 Ovários
17 2.2.6 Trompas de Falópio
18 2.2.7 Recto
18 2.2.8 Fémur (cabeça femural)
18 2.3 Conclusões
19 Capitulo III
20 Imagem Médica
20 3.1 Introdução
21 3.2 Imagem Médica
21 3.3 Imagem Médica Digital
21 3.4 Conclusões
23 Capítulo IV
24 Métodos e Algoritmos de Segmentação
24 4.1 Introdução
25 4.2 Métodos e Algoritmos de Segmentação
25 4.2.1 Histograma
26 4.2.2 Realce
27 4.2.3 Equalização do Histograma
27 4.2.4 Especificação do Histograma
28 4
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher 4.2.5 Segmentação por Thresholding
29 4.2.6 Crescimento de região “region growing”
30 4.2.7 Divisão e agrupamento de regiões (splitting and merging)
31 4.2.8 Transformada de watershed
32 4.2.9 Segmentação baseada em orlas (edge-based)
33 4.2.10 - Contornos Activos
34 4.2.10.1 Modelos Deformáveis
34 4.2.10.2 Modelos Deformáveis – Snakes
35 4.2.10.3 Modelos Deformáveis – Snakes: Por minimização de energia
35 4.2.10.4 Modelos deformáveis dinâmicos
36 4.2.10.5 Discretização e simulação numérica
37 4.2.11 – Modelos deformáveis probabilísticos
38 4.3 Conclusão
39 Capitulo V
40 Ferramentas Desenvolvimento e Linguagens de Programação
40 5. Ferramentas Desenvolvimento e Linguagens de Programação
41 Capítulo VI
43 Conclusões e
Perspectivas Futuras
43 6.Conclusões
44 5
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Índice de Figuras
Fig. 1 - Passos fundamentais no processamento de imagem (adaptado de [4]). ............. 8 Fig. 2 - Diagrama da distância entre pixéis dos i-ésimos contornos manual e automático
para o cálculo do desvio médio do pixel (imagem de [3]). ............................................ 10 Fig. 3 - Esqueleto Humano ( retirada de [5]). ............................................................... 14 Fig. 4 - Estrutura óssea da cavidade Pélvica (bacia) (retirada de [5])........................... 15 Fig. 5 - Estrutura óssea da cavidade Pélvica (Fémur) (imagem de [5]). ........................ 15 Fig. 6 - Região da cavidade pélvica feminina: Corte sagital (imagem de [5]). .............. 16 Fig. 7 - Região da cavidade pélvica feminina: Corte frontal da pélvis. (imagem de [5])
........................................................................................................................................ 16 Fig. 8 - Ilustração esquemática de uma imagem digital (retirado de [4]). ......... 22 Fig. 9 - Exemplo do efeito da equalização do histograma no contraste de uma imagem
(retirado de [12]). .......................................................................................................... 28 Fig. 10 - Resultados obtidos (retirado de [12]). ............................................................ 28 Fig. 11 - Segmentação por limitação: (a) – Histograma fraccionado por um limite; (b) –
Histograma fraccionado por dois limites T1 e T2 (retirado de [12]). ............................. 30 Fig. 12 - União e divisão de imagens (retirado de [4])................................................. 32 Fig. 13 – Representação de um relevo em tonalidades de cinzento (retirado de [12]).. 33 6
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Capitulo I
Introdução à Dissertação e sua Organização
7
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher 1.1 Introdução
A Visão Computacional é a ciência e tecnologia das máquinas que têm a
capacidade de “ver”. Esta área da ciência, tem como objecto de estudo o
desenvolvimento de teorias e tecnologia para a construção de sistemas
artificiais que obtém informação de imagens ou dados multidimensionais [1].
Grande parte da Visão Computacional utilizada em medicina, lida com
métodos que empregam radiação electromagnética. A Imagiologia Médica é o
termo utilizado para designar um conjunto de métodos de diagnóstico, com as
quais se pretende obter imagens anatómicas, quer sejam de tecido mole ou
tecido ósseo, e que utilizam fontes de radiação ionizante e não ionizante.
Dentro da Imagiologia Médica existem diversas técnicas, a maioria das quais
utiliza radiação X como o raios-X convencional, mamografia, tomografia
computorizada. Mas também é utilizada radiação não ionizante como no caso
da ressonância magnética ou ondas mecânicas como no caso da
ultrasonografia. Em todas estas técnicas o objectivo principal é obter uma
imagem tão boa quanto possível, isto é, com uma boa resolução espacial e
elevado contraste entre as diversas estruturas anatómicas. No processo de
formação de imagem, as ondas electromagnéticas são reflectidas pelas
superfícies dos tecidos, este sinal é capturado por sensores e processadas por
computadores que formam a imagem. O processo de formação de imagem é
baseado nas leis da óptica e da física do estado sólido.
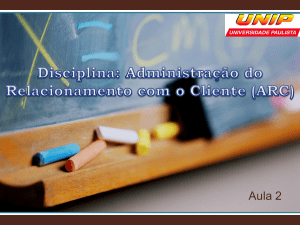
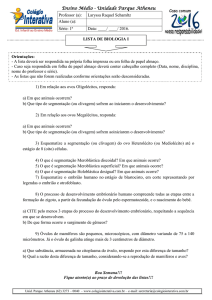
Gonzalez, [4] apresenta o fluxograma ilustrado na figura 1, com os passos
fundamentais no processamento de imagens. Este estudo está focado na etapa
da segmentação de imagens.
Fig. 1 - Passos fundamentais no processamento de imagem (adaptado de [4]).
8
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher O termo segmentação significa a identificação de uma ou mais
estruturas existentes em imagens, separando-as das demais, [2,3]. A sua
visualização pode ser feita não só numa imagem bidimensional como também
transportada para inúmeros cortes (planos bidimensionais) definidos por planos
arbitrários, como em imagens tridimensionais.
A segmentação de imagens é o processo de dividir uma imagem em
sub-regiões homogéneas. Por homogeneidade entende-se conformidade de
algumas características: como a cor, ou níveis de cinzento. A segmentação
pode ser realizada das seguintes formas, [2]:
o Segmentação Manual: Neste tipo de segmentação o utilizador indica
explicitamente os pixéis da imagem em análise que devem ser
incluídos na região de interesse. Estes métodos incluem selecção
manual de pixéis que pertencem à fronteira da área de interesse. A
selecção
de
pixéis
individuais
é
claramente
trabalhosa
e
é
normalmente a mais utilizada em medicina. A fronteira é o conjunto de
vértices individuais que delimitam a região de interesse. Algoritmos de
fronteira variam bastante entre aplicações e implementações. Alguns
algoritmos são discretos, guardando somente os vértices consecutivos.
Outros algoritmos de fronteira discretos são mais precisos e simples de
implementar.
o Segmentação Automática: Neste tipo de segmentação um algoritmo
selecciona automaticamente os pixéis baseando-se num conjunto de
regras
previamente
determinadas.
Estes
métodos
não
são
normalmente muito eficientes devido à complexidade das imagens
envolvidas. Para além disso, o pouco contraste entre regiões conduz
por vezes a erros nos algoritmos automáticos. Assim, a intervenção
humana é normalmente necessária, tornando-se estes métodos
semiautomáticos.
o Segmentação Semiautomática: Neste tipo de segmentação combinamse os métodos manuais e automáticos. Estes métodos consistem em
fornecer informação inicial acerca da região de interesse, permitindo
ao utilizador guiar e melhorar o processo de segmentação automática.
9
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Deste modo, quaisquer erros ainda presentes e introduzidos pelo
processo de segmentação automática podem ser corrigidos pela
edição manual.
A segmentação é um processo de elevada complexidade que deve ter
em conta as diferentes deformações que caracterizam a região anatómica a ser
segmentada.
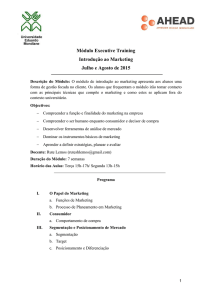
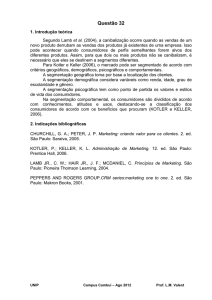
No campo clínico, a delineação manual de estruturas anatómicas
consome muito do tempo laboral dos profissionais de saúde e está muitas
vezes sujeita a erros por falta de contraste entre as estruturas. Vários estudos
mostram que a delineação feita manualmente é normalmente maior do que a
feita recorrendo a métodos automáticos, figura 2 [3].
Fig. 2 - Diagrama da distância entre pixéis dos i-ésimos contornos manual e automático para o
cálculo do desvio médio do pixel (imagem de [3]).
Um outro exemplo de uma especialidade médica além da Imagiologia,
onde a delineação automática de estruturas anatómicas representaria uma
enorme beneficio no quotidiano clínico, seria na Radioterapia Externa e
Braquiterapia, onde os médicos e físicos tem de delinear o tumor e as
estruturas anatómicas envolventes para realizar o plano de tratamento e assim
garantir que todo o tumor é irradiado poupando ao máximo os tecidos sãos
adjacentes.
10
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher 1.2 Objectivos
O objectivo desta Monografia é estudar metodologias de segmentação
automática de imagens de forma a aplicá-las na Segmentação de Estruturas
em Imagens da Cavidade Pélvica da Mulher.
1.3 – Metodologia
Existem vários artigos publicados sobre o tema de segmentação em
imagens com as mais diversas finalidades.
No contexto desta Monografia, centrou-se a pesquisa em trabalhos
publicados sobre segmentação automática ou semi-automática de imagens
médicas, verificando-se que os métodos adoptados dependiam muito da zona
anatómica de interesse.
De uma pesquisa mais abrangente, tentou-se reduzir para alguns
trabalhos de referência dos quais se destacam:
- Betrouni N., Vermandel M., A framework for 3D reconstruction of
human organs from MR images: a model and fuzzy set principles based
approach. Application to prostate segmentation and reconstruction.
- Juliana Fernandes Camapum, Alzenir O.Silva, Alan N. Freitas,
Hansenclever de F. Bassani, Flávia Mendes O.Freitas; Segmentation of Clinical
Structures from Images of the Human Pelvic Área; Computer Society.
1.4 – Estrutura
O texto desta Monografia foi desenvolvido da seguinte forma:
1. Introdução
No presente capítulo, apresenta-se o tema da Monografia, indicando
algumas bases teóricas sobre Visão Computacional, Processamento de
Imagem e Segmentação.
11
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher 2.
Anatomia – Zona Pélvica da Mulher
Neste capítulo pretende-se descrever a anatomia da mulher em
particular da cavidade pélvica.
3.
Imagem Médica
Neste capítulo aborda-se a natureza das imagens médicas, suas
variantes e características. Referiu-se dentro do cenário clínico actual, as
principais tecnologias e equipamentos para aquisição de imagens médicas.
Apresentou-se também uma explanação introdutória ao formato DICOM
(Digital Imaging Communications in Medicine).
4.
Métodos de Segmentação e Algoritmos
Neste capítulo apresentam-se alguns métodos e técnicas utilizadas na
segmentação automática ou semi-automática de imagens.
5.
Ferramentas de Desenvolvimento e Linguagens de Programação
Este capítulo tem como objectivo a escolha da linguagem de
programação e das ferramentas computacionais a utilizar na fase de
desenvolvimento deste projecto.
6.
Conclusões e Perspectivas Futuras
Este Capítulo é reservado às conclusões finais desta Monografia e às
perspectivas de futuro quanto ao desenvolvimento da futura Dissertação.
12
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Capitulo II
Anatomia – Zona Pélvica da Mulher
13
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher 2.1 Introdução
A anatomia é a ciência que estuda o corpo humano.
Este capítulo tem como objectivo estudar a anatomia humana, em
particular a da cavidade pélvica da mulher.
Com a finalidade, de reconhecer as estruturas anatómicas visualizadas
nas imagens utilizadas neste projecto, este capítulo irá ilustrar as regiões
anatómicas de interesse e descrever as características dos ossos e órgãos que
se pretendem segmentar em imagens médicas.
2.2- Anatomia – Zona Pélvica da Mulher
Os tecidos ósseos são também conhecidos como tecidos estruturantes e
tem como funções principais o suporte de cargas/esforços e protecção dos
órgãos. Na figura 3 pode-se observar a estrutura óssea do Homem e na figura
figura 4 a estrutura óssea da cavidade pélvica
Fig. 3 - Esqueleto Humano ( retirada de [5]).
14
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Fig. 4 - Estrutura óssea da cavidade Pélvica (bacia) (retirada de [5]).
Na figura 5, pode-se observar em detalhe a estrutura do fémur
Fig. 5 - Estrutura óssea da cavidade Pélvica (Fémur) (imagem de [5]).
Nas figuras 6 e 7 observa-se os órgãos que se encontram na cavidade
pélvica da mulher
15
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Fig. 6 - Região da cavidade pélvica feminina: Corte sagital (imagem de [5]).
Fig. 7 - Região da cavidade pélvica feminina: Corte frontal da pélvis. (imagem de [5])
2.2.1 Útero
É o órgão de gestação feminino. Na mulher adulta, o útero tem 7 a 8 cm
de comprimento, encontra-se situado entre o recto e a bexiga urinária,
atapetado pelo peritoneu e fixo pelos ligamentos largos, redondos e
uterosagrados. Consta de uma parte superior ou corpo, de forma triangular, em
cujos ângulos superiores desembocam nas trompas de Falópio, e de uma parte
inferior ou colo, cujo orifício externo comunica com a vagina. É constituída por
três camadas: sereosa ou externa, muscular ou média – atinge um grande
desenvolvimento durante a gravidez e é de musculatura lisa – e interna ou
endométrio – atapetada toda a superfície interna e sofre alterações cíclicas
mensais que conduzem à menstruação. Está irrigado pela artéria uterina; o
16
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher sangue venoso é recolhido pela veia uterina, que termina na veia hipogástrica,
[5].
2.2.2 Vagina
É o órgão copulador da mulher. É um órgão ímpar e mediano, cílindrico,
musculomenbranoso, dilatável e extensível. Tem um comprimento de 6 a 7 cm.
A sua extremidade superior está unida ao colo uterino, à volta do qual se forma
um fundo de saco, [5].
2.2.3 Bexiga
É um órgão muscular que armazena a urina que os ureteros drenam
para ela de forma regular e contínua. Está situada na região pélvica, atrás da
púbis. Tem uma forma ovóide e uma capacidade de 300 a 350 cm3 numa
mulher adulta, [5].
2.2.4 Uretra Feminina
Tem um comprimento de 3 a 4 cm e dirige-se da bexiga ao orifício
inferior ou meato, situado na parte posterior do clítoris, [5].
2.2.5 Ovários
Os ovários ou glândulas genitais da mulher são duas estruturas
glandulares situadas na região pélvica, atrás do útero, numa prega do
peritoneu chamada ligamento largo. A sua forma é a de uma amêndoa,
variando as suas dimensões e cor com a idade e com a fase do ciclo ovárico.
Estão ligadas ao útero pelas trompas de Falópio, cujas extremidades em forma
de fímbrias os cobrem parcialmente. Na sua constituição interna distinguem-se
duas zonas: zona cortical ou germinativa, disposta perifericamente e integrada
por um tecido conjuntivo chamado estroma e pelos folículos ováricos em graus
diferentes de maturação – primordial, primário, secundário, terciário e folículo
17
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher maduro ou de Graaf, e zona medular ou vascular situada no centro do órgão. O
ovário possui uma importante função endócrina, a secreção das hormonas
chamadas estrógenios e prosgesterona, que actuam sobre o aparelho genital e
especialmente sobre o útero preparando-o para a fecundação, nidação e
nutrição do embrião, [5].
2.2.6 Trompas de Falópio
São dois canais, um direito e outro esquerdo, que se estendem desde o
ovário até ao ângulo superior do útero. A sua função é recolher o óvulo quando
se rompe o folículo de Graaf e transportá-lo para a cavidade uterina, onde se
fixará se tiver sido fecundado e donde será expulso em caso contrário. Medem
cerca de 10 cm de comprimento e estão situadas entre as folhas do ligamento
largo, unidas ao útero pelo ligamento tubo-ovárico. Constam de uma porção
tubolar e de uma extremidade externa chamada pavilhão ou infundíbulo, em
forma de funil, dotado de uns prolongamentos que recebem o nome de
fímbrias, [5].
2.2.7 Recto
É a parte final do tubo digestivo e termina no canal anal. Possui
geralmente 3 pregas em seu interior e é uma região muito vascularizada, [5].
2.2.8 Fémur (cabeça femural)
O Fémur é um osso longo, o mais comprido do corpo humano. Articulase a nível da bacia com o osso ilíaco, e a nível do joelho com a rótula, a tíbia e
o perónio. A sua epífase superior apresenta a cabeça femural, de forma
esférica, o colo, que é um estrangulamento que une a cabeça com o resto do
osso e duas eminências, os trocanteres, para inserções musculares. A diáfise
femural, longa e resistente é ligeiramente curva e retorcida sobre o seu eixo.
Este elemento é constituído por osso compacto, [5].
18
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher 2.3 Conclusões
Da análise deste capítulo conclui-se que a cavidade pélvica da mulher é
constituída por estruturas anatómicas geometricamente indefinidas, e por
tecidos muito finos, com densidades muito próximas o que dificulta o contraste
entre as estruturas presentes nas imagens.
19
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Capitulo III
Imagem Médica
20
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher 3.1 Introdução
Em 1895, o físico alemão Wilhelm Conrad Röntgen descobriu os raios X
e aproximadamente cinco anos mais tarde a radiologia surgia como
especialidade médica. Na década de 40, apareceram “novas tecnologias” como
intensificadores de imagem, que permitiram a realização de fluoroscopias em
tempo real. Em 1970, Godfrey N. Hounsfield desenvolveu o primeiro tomógrafo
computorizado de raios X Godfrey N. Hounsfield em conjunto com Allan
Cormack, dedicaram-se a investigar os métodos matemáticos envolvidos no
processo de aquisição de imagem da tomografia computorizada e receberam o
prémio Nobel da Medicina em 1979, [6].
Este capitulo tem como objectivo principal abordar os diferentes tipos de
imagens utilizadas no quotidiano clínico, as suas características e a sua forma
de aquisição.
3.2 Imagem Médica
A aquisição de imagens médicas pode ser feita através de variados
métodos invasivos e não-invasivos. Os métodos invasivos caracterizam-se pela
introdução de um líquido ou instrumento no interior do corpo; nesta categoria
encontram-se, por exemplo, as angiografias e as imagens de Medicina Nuclear,
como as imagens de PET - Positron Emission Tomography e SPECT - Single
Photon Emission Computed Tomography. Os métodos não invasivos
encontram-se por exemplo os raios X, a MRI - Magnetic Resonance Imaging e
a CT – ComputerTomography e a ultra-sonografia, [7, 8]
3.3 Imagem Médica Digital
Os computadores apenas trabalham com números discretos, não têm
por isso a capacidade de representar directamente as tonalidades de cinzento
21
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher ou de cores. Desta forma, para que o computador possa apresentar imagens e
trabalhar com elas necessita que estas sejam convertidas em dados numéricos
discretos.
Para tal conversão, a imagem é subdividida numa matriz. Essa matriz é
normalmente designada por “imagem matriz” e a cada elemento dessa matriz é
chamado por pixel - picture element. Cada pixel contém a informação sobre a
posição espacial e o nível de cinzento ou de cor associado. Assim a imagem é
representada espacialmente e a amplitude de cada elemento é quantificada
num número finito de níveis de cinzento ou de cor. Cada pixel é representado
pela função f(x,y), onde f é a intensidade do pixel e (x,y) a posição espacial do
pixel ao longo do eixo cartesiano, cuja a origem é usualmente definida no
primeiro pixel do canto superior esquerdo da imagem. Os números de linhas e
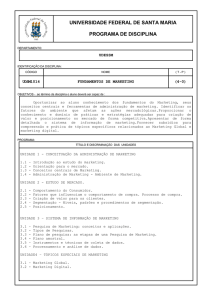
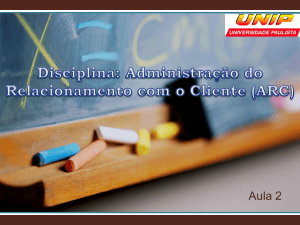
de colunas da matriz são muitas vezes indicados por MxN. A figura 8 ilustra
uma imagem digital. A imagem da esquerda é uma matriz de 4x4 e a da direita
representa os valores numéricos correspondentes aos vários níveis de
cinzento. O valor 255 representa o branco e o 0 (zero) o preto, [9].
Fig. 8 - Ilustração esquemática de uma imagem digital (retirado de [4]).
No caso das imagens médicas, o nível de cinzento traduz alguma
propriedade do tecido ou órgão; ou seja uma determinada propriedade física.
Nas imagens adquiridas com raios X por exemplo, o valor numérico discreto
representa a atenuação dos tecidos a este tipo de radiação. Assim quanto
maior for a profundidade menor o nível de cinzento.
22
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher O DICOM - Digital Imaging Communications in Medicine é o formato
standart das imagens médicas, criado com a finalidade de se padronizar as
imagens adquiridas com finalidades clínicas.
O padrão DICOM é formado por uma série de normas que permitem que
imagens médicas e as informações associadas sejam trocadas entre
equipamentos de Imagiologia e computadores dentro de um hospital ou entre
hospitais. Tornando assim compatíveis equipamentos de diferentes marcas,
viabilizando o acesso rápido aos exames pela comunidade médica e
aumentando a fiabilidade, pois os arquivos usados incluem todos os dados dos
exames e dos pacientes.
O sistema DICOM foi desenvolvido pela indústria de imagem,
representada por membros do NEMA - National Electric Manufacturers
Association dos EUA, e pela comunidade de utilizadores de imagens médicas,
como o American College of Radiology, o American College of Cardiology e o
Europea Society of Cardiolgy. Actualmente existe o DICOM Standars
Committee formado por fabricantes de equipamentos que geram imagens
neste formato e representantes de grandes sociedades médicas.
O DICOM é a terceira versão padrão de imagens médicas, vindo após o
ACR/NEMA 1.0 e 2.0 que foram desenvolvidos em meados da década de 80. A
tendência é que, no futuro próximo, o DICOM se torne padrão mundial, [9].
O padrão DICOM permite, por exemplo, que informações sobre o
paciente e o exame sejam transmitidos através de uma rede de comunicação
sem perda de definição, possibilitando o diagnóstico médico remoto, [9].
3.4 Conclusões
Da análise deste capítulo, conclui-se que embora as imagens médicas
possam ser adquiridas recorrendo a diversas técnicas, todas utilizam radiação
electromagnética na sua aquisição, seja esta ionizante ou não-ionizante. Com a
nova era da imagem digital, a imagem médica tende agora a padronizar-se de
forma a poder ser usada em qualquer instituição de saúde ou equipamento
independentemente onde ela tenha sido adquirida.
23
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Capítulo IV
Métodos e Algoritmos de Segmentação
24
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher 4.1 Introdução
O termo segmentação significa a identificação de uma ou mais
estruturas existentes em imagens, separando-as das demais. A sua aplicação
pode ser realizada não só numa imagem bidimensional, mas também em
cortes (planos bidimensionais) definidos por planos arbitrários em volumes de
imagem, em volumes de dados, podendo inclusive considerar texturas.
A segmentação e reconstrução de estruturas, é um processo de elevada
complexidade porque deve ter em contas as diferentes formas e possíveis
deformações das mesmas, características da região anatómica em causa.
Neste
segmentação
capitulo
abordam-se
automática
e
alguns
semiautomática,
métodos
e
bem
como
algoritmos
a
de
morfologia
matemática envolvida.
4.2 Métodos e Algoritmos de Segmentação
Usualmente, após a aquisição de imagens médicas, segue-se o seu préprocessamento, de forma a realçar as estruturas e melhorar o contraste entre
estas, seguindo-se a fase de segmentação e o reconhecimento das respectivas
estruturas anatómicas.
A finalidade das técnicas de realce é processar uma imagem de modo
que o resultado seja mais apropriado para uma dada aplicação especifica do
que a imagem original, [4].
A segmentação tem como principal objectivo, dividir uma imagem em
regiões ou subconjuntos homogéneos em função de uma ou mais
características. Algumas das suas aplicações em medicina são na: simulação
de cirurgias, medida de volume de tumores, classificação automática de células
sanguíneas e detecção de micro-calcificação em mamogramas, [11].
Existem vários métodos de segmentação, não existindo um método
universal; ou seja, um método de segmentação único para todos os tipos de
imagem e aplicação. Assim, a selecção de uma técnica apropriada depende do
tipo de imagens e aplicações.
Bankman [11] classifica as técnicas de segmentação da seguinte forma:
25
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher 1. Manual, semiautomática e automática.
2. Método local (baseado no valor do pixel) e método global (baseado na
região).
3. Delineação manual → segmentação de baixo nível e segmentação de
alto nível;
- Segmentação de baixo nível → análise de pixéis, limitação e
crescimento de regiões;
- Segmentação de alto nível → análise de modelos –
multiespectral (combinação de imagens de várias fontes) e técnicas de
mapeamento de características.
4. Clássicas (limitação, orlas e regiões); estatísticas; lógica fuzzy e rede
neuronais.
Dentro de um conjunto de técnicas possíveis, apresentam-se os
algoritmos de realce e segmentação mais utilizados no processamento de
imagens médicas e que são relevantes à realização futura deste projecto. O
realce é aplicado na fase de pré-processamento com o objectivo de fazer
sobressair regiões que serão detectadas pelos algoritmos de segmentação.
4.2.1 Histograma
Algumas técnicas de realce e de definição de limites da região de
interesse são baseadas no histograma da imagem original, outras são
baseadas em propriedades tais como a média, desvio padrão ou gradiente.
Tanto o realce quanto a definição dos limites considerados, podem ser locais
ou globais. A técnica é global quando depende da imagem como um todo e
local quando depende das propriedades de alguma região específica da
mesma.
O histograma normalizado p(rk) de uma imagem pode ser definido como
uma estimativa da probabilidade de ocorrência de um nível de cinzento da
imagem original:
26
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher ⎧ p (rk ) = nnk k = 0,1,..., L − 1
⎪
p( z ) = ⎨
k
0 ≤ rk ≤ 1
⎪rk =
L −1
⎩
Eq. 1
onde L é a quantidade de níveis de cinzento da imagem, n é o número total de
pixéis da imagem, nk é o número de pixéis com nível de cinzento k e rk é o nível
de cinzento normalizado.
A função pz(z) é conhecida como função densidade de probabilidade dos
níveis de cinzento.
4.2.2 Realce
O realce tem como objectivo melhorar a qualidade de uma imagem,
permitindo obter um melhor contraste entre as estruturas presentes. A técnica
de realce de contraste tem como o objectivo melhorar a qualidade da imagem
sob critérios subjectivos do olho humano. É utilizada, normalmente, na etapa
de pré-processamento das imagens, [4].
4.2.3 Equalização do Histograma
A equalização é uma técnica de realce que transforma o histograma da
imagem original numa distribuição de probabilidade uniforme; ou seja, utiliza
toda a faixa de níveis de cinzento de 0 (zero) a 255. A equalização é
independente do tipo da imagem de entrada e pode proporcionar um excelente
efeito de realce em várias aplicações.
A equalização do histograma de uma imagem pode ser obtida por:
S=
freq × 255
Pt
Eq. 2
,
sendo s o nível de cinzento da imagem equalizada, freqt a frequência
acumulada para o nível de cinzento i da imagem original e Pt o número total de
pixéis da imagem, [4].
27
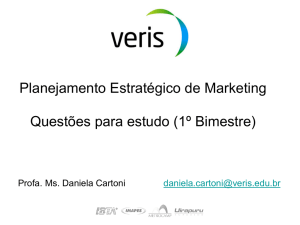
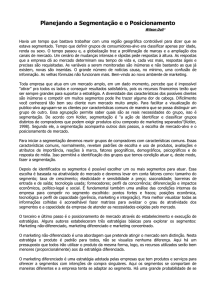
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Pode-se observar a aplicação desta técnica na figura 9.
Fig. 9 - Exemplo do efeito da equalização do histograma no contraste de uma imagem (retirado de
[12]).
Juliana Fernandes Camapum [12], apresenta os seguintes resultados, na figura
10, da aplicação deste método:
Fig. 10 - Resultados obtidos (retirado de [12]).
4.2.4 Especificação do Histograma
A equalização do histograma não é adequada para aplicações
interactivas de realce de uma imagem. A justificação para tal é que este
28
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher método é capaz de gerar apenas um resultado: uma aproximação de um
histograma uniforme. Quando conhecemos o tipo de imagem, é melhor utilizar
uma técnica chamada Especificação do Histograma. Neste caso, o histograma
desejado é um dos parâmetros de entrada do algoritmo que irá gerar uma nova
imagem com a distribuição de probabilidade especificada, [4]. Assim, sejam
pk(k) e pz(z) as funções de densidade de probabilidade original e desejada,
respectivamente, o procedimento para especificação do histograma pode ser
resumido da seguinte forma:
1.
Equalização dos níveis da imagem original através da Eq. (2), obtendose s.
2.
Especificação da função densidade desejada, obtendo a função de
transformação G(z) usando:
z
ν = G( z ) = ∑ p z
Eq. 3
i =0
onde ν é a função de transformação, também simbolizada por G(z), pz é a
função de densidade de probabilidade desejada e i são os pixéis da imagem
original.
3. Aplicação da função de transformação inversa, z= G −1 ( s ) , aos níveis de
cinzento obtidos no primeiro passo.
4.2.5 Segmentação por Thresholding
Esta técnica de limitação global é baseada na ideia de que o histograma
da imagem é bimodal. Sendo a imagem original f(x,y), desta forma, o objecto
pode ser extraído do fundo considerando um limiar T. O limiar T óptimo é o
nível de cinzento do vale que fica entre os dois picos do histograma da imagem
original. O resultado é uma imagem binária g(x,y) com valores 1 (um)
correspondente ao objecto e 0 (zero) correspondendo ao fundo da imagem. A
imagem binária g(x,y) será obtida por:
29
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher ⎧1............se.. f ( x, y ) > T
g ( x, y ) = ⎨
⎩0...........se.. f ( x, y ) ≤ T
Eq. 4
.
Se a imagem contém mais do que um objecto, é possível segmentá-la
aplicando vários limites individuais, como exemplificado na figura 11, esse
processo é conhecido como limitação local. A referida figura mostra a limitação
global de um histograma por um único valor T.
Fig. 11 - Segmentação por limitação: (a) – Histograma fraccionado por um limite; (b) – Histograma
fraccionado por dois limites T1 e T2 (retirado de [12]).
A limitação global é computacionalmente simples e rápida, com
resultados satisfatórios quando aplicada a estruturas com valores de cinzento
uniformes e de contraste acentuado relativamente ao fundo da imagem em
causa. Bankman [11] e Gonzalez [4] concluem que esta técnica não gera bons
resultados em imagens com baixo contraste entre o objecto e o fundo, em
imagens ruidosas e em imagens com intensidade de fundo variante.
4.2.6 Crescimento de região “region growing”
Ao contrário do método de limitação que se baseia na diferença de
intensidade dos pixéis, o método de crescimento de regiões procura por grupos
(regiões) de pixéis semelhantes.
O processo de procura de pixéis semelhantes inicia-se com a escolha de
um pixel ou um grupo de pixéis, usualmente designados por sementes. A
escolha destes pixéis pode ser manual ou automática e deve fazer-se numa
parte da estrutura que pretende-se segmentar.
O passo a seguir do algoritmo é testar os pixéis vizinhos, um de cada
vez e adicioná-los ao grupo para o crescimento da região. Os novos pixéis são
30
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher adicionados de acordo com a semelhança sobre um critério da uniformidade,
também chamado teste de homogeneidade. O procedimento repete-se até não
ser possível adicionar nenhum novo pixel. O objecto é então representado por
todos os pixéis “aceites” durante o procedimento de crescimento da região,
[11].
Um dos testes de uniformidade é comparar a intensidade do pixel a ser
testado e o valor da intensidade média da região. Se a diferença é menor do
que um certo valor estipulado, o pixel é incluído na região caso contrário ele
será integrado na região de fronteira.
O
crescimento
da
região
depende
fortemente
do
critério
de
homogeneidade. Se for escolhido erradamente, pode gerar fragmentação da
região ou mistura de regiões distintas que não caracterizam adequadamente a
estrutura de interesse, [3]. Um outro problema do método de crescimento de
região é que caso o processo seja erradamente guiado para pontos distintos
pode levar a distintos crescimentos de regiões. A vantagem deste método está
no facto de ser capaz de segmentar correctamente regiões que têm a mesma
propriedade mesmo estando algo espacialmente afastadas.
4.2.7 Divisão e agrupamento de regiões (splitting and merging)
A técnica de crescimento de região discutida anteriormente, tem como
objectivo fazer “crescer” regiões a partir de um conjunto de grupo de pixéis préseleccionados. Uma alternativa é subdividir a imagem num conjunto de regiões
arbitrárias e disjuntas. Esta técnica é chamada de divisão de região – splitting
Para uma imagem quadrada, uma abordagem para a segmentação é
subdividi-la em quadrantes cada vez menores de modo que para qualquer
região todos os pixéis tenham em comum um determinado critério. Quando o
critério for falso para qualquer quadrante ele é subdivido em sub-quadrantes.
Se apenas a divisão (subdivisão) for usada, a partição final poderá
conter regiões adjacentes com propriedades idênticas. Este problema poderá
ser contornado se permitirmos a fusão das regiões da mesma maneira que a
divisão [12].
31
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher A combinação da divisão com agrupamento de regiões, também
conhecida como splitting-and-merging, utiliza simultaneamente as vantagens
dos dois métodos. A técnica baseia-se em considerar, inicialmente, a imagem
como um único segmento, dividindo-a em seguida, em quatro sub-regiões, se a
região a ser dividida não responder ao critério de homogeneidade dos níveis de
cinzento. Após atingir o limite, as regiões vizinhas e similares são agrupadas. A
figura 12 exemplifica o método de divisão e agrupamento; neste caso, a
imagem é inicialmente dividida em quatro partes.
Fig. 12 - União e divisão de imagens (retirado de [4]).
Um outro método que também utiliza a técnica de crescimento de regiões –
region growing é a transformada de watershed.
4.2.8 Transformada de watershed
Um algoritmo de segmentação muito utilizado é o watershed. Este
algoritmo assume que a imagem é uma superfície topográfica, considera a
altitude do relevo directamente proporcional ao nível de cinzento do pixel.
Imaginando que uma gota de água cai nessa superfície, de acordo com
a lei da gravidade, esta irá cair pelo declive até atingir o ponto mínimo. O
conjunto de pontos da superfície cujos caminhos de declives mais íngremes
atingem um determinado mínimo constitui uma bacia de retenção associada a
esse mínimo. As watersheds, ou linhas divisórias da água, são as zonas que
dividem as bacias de retenção adjacentes, [4].Isto é ilustrado na figura 13.
32
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Fig. 13 – Representação de um relevo em tonalidades de cinzento (retirado de [12]).
A transformada watershed é então uma poderosa ferramenta para
segmentação se a imagem de entrada f(x,y) for modificada de modo a ter
mínimos internos aos objectos segmentados.
4.2.9 Segmentação baseada em orlas (edge-based)
Uma orla, borda ou fronteira, é o limite entre duas regiões com
propriedades relativamente distintas de nível de cinzento. Os algoritmos de
detecção de orlas partem do pressuposto que as regiões de uma imagem são
suficientemente homogéneas para a transição entre duas regiões possa ser
determinada com base na variação dos níveis de cinzento.
A ideia base da maioria das técnicas para a detecção de orlas de
intensidade é a que a fronteira dos objectos de uma imagem é definida pelo
gradiente da imagem. O gradiente é definido como uma aproximação da
primeira derivada da imagem. Para uma dada imagem f(x,y), a magnitude do
gradiente pode ser calculada como:
G =
[G
2
x
+G
2
y
]=
⎡⎛ ∂f ⎞ 2 ⎛ ∂f ⎞ 2 ⎤
⎢⎜ ⎟ + ⎜⎜ ⎟⎟ ⎥
⎢⎣⎝ ∂x ⎠ ⎝ ∂y ⎠ ⎥⎦
33
Eq. 5
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher e a direcção do gradiente Φ como:
⎛ Gy
D = tan −1 ⎜⎜
⎝ Gx
⎞
⎟⎟
⎠
Eq. 6
onde, Gx e Gy são gradientes na direcção x e y, respectivamente.
Esta técnica de detecção de fronteira ou orlas é muito sensível ao ruído
presente na imagem original e com imagens suavizadas poderá levar à
detecção incorrecta das orlas.
Uma outra limitação da segmentação por detecção de orlas é o facto
usualmente de não gerar contornos fechados. Descontinuidades obtidas devem
ser frequentemente analisadas e preenchidas de forma a obter-se curvas
fechadas, [4,11].
4.2.10 - Contornos Activos
Os contornos activos, usualmente designados por snakes, são os
modelos deformáveis 2D mais comuns. A seguir descrever-se-ão alguns
métodos de segmentação baseada em contornos activos, [13].
4.2.10.1 Modelos Deformáveis O elevado número de aplicações dos modelos deformáveis na área da
imagem médica é, sem dúvida, responsável por uma elevada percentagem do
trabalho desenvolvido no âmbito dos corpos deformáveis, [13]
Modelos deformáveis bidimensionais e tridimensionais têm vindo a ser
utilizados para segmentar, visualizar, seguir e quantificar, uma variedade de
estruturas anatómicas que vão desde a escala macroscópica até à
microscópica.
Os fundamentos matemáticos dos modelos deformáveis representam a
confluência da geometria, da física e da teoria da aproximação. A geometria
serve para apresentar a forma do objecto, a física impõe restrições ao modo
como esta pode variar no espaço e no tempo, e a teoria da aproximação
óptima justifica formalmente o mecanismo para ajustar os modelos aos dados.
34
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Estes modelos geométricos, contínuos e interligados, consideram a
fronteira de um objecto como um todo e podem utilizar conhecimento existente
a priori sobre a forma do mesmo para restringir o problema da segmentação.
Entre as várias utilizações dos modelos deformáveis em análise de
imagem médica destacam-se os modelos de contorno deformáveis através de
snakes, para segmentar estruturas em imagens 2D, [13]
4.2.10.2 Modelos Deformáveis – Snakes A aplicação de snakes é uma metodologia que utiliza modelos de
contornos deformáveis para extrair as regiões de interesse. Não é, contudo,
isenta de limitações. As snakes foram desenvolvidas como modelos
interactivos e, em aplicações não interactivas, devem ser inicializadas próximas
à estrutura desejada de forma a garantir-se um bom desempenho, [13].
Desde que estabilizadas de forma adequada, as snakes podem ser
utilizadas para estabelecer a correspondência entre contornos em imagens
diferentes e também podem ser utilizadas no seguimento de objectos
deformáveis em sequências de imagens, [13].
4.2.10.3 Modelos Deformáveis – Snakes: Por minimização de energia Geometricamente, uma snake é um contorno paramétrico definido no
plano
da
imagem
( x, y ) ∈ R 2 que
pode
ser
representado
como
υ ( s ) = ( x( s ), y ( s ))T , onde x e y são as funções de coordenadas e s ∈ [0,1] é o
domínio paramétrico. A forma do contorno sujeito a uma imagem f(x,y) é ditada
pelo funcional:
ε (υ ) = S (υ ) + P(υ )
Eq. 7
O funcional pode ser interpretado como a representação da energia do
contorno - ε (υ ) - e a forma final do contorno corresponde ao mínimo dessa
energia. O primeiro termo no funcional é a energia de deformação interna:
2
∂υ
∂ 2υ
S (υ ) = ∫ ω1 ( s)
+ ω2 ( s) 2 ds
∂s
∂s
0
1
35
Eq. 8
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Esta energia caracteriza a deformação de um contorno flexível e
elástico. Duas funções definem as características físicas simuladas do
contorno: ω1 ( s ) controla a tensão do contorno, enquanto ω 2 ( s ) controla a sua
rigidez. O segundo termo da equação 7 atrai a snake para o objecto desejado
da imagem. Tradicionalmente este termo é representado da seguinte forma
1
P (υ ) = ∫ ∏(υ ( s ))ds
Eq. 9
0
onde ∏(υ ( s)) significa uma função potencial escalar a definir no plano da
imagem.
Para aplicar snakes em imagens, potenciais externos são definidos de
maneira a que os seus mínimos locais coincidam com extremos de intensidade,
orlas ou outras características com interesse na imagem. Por exemplo, o
contorno será atraído para orlas de intensidade numa imagem f(x,y) por
escolha de um potencial ∏ ( x, y ) = −c ∇[Gσ * f ( x, y ) ] onde c controla a magnitude
do potencial, ∇ é o operador de gradiente e Gσ * f significa a convolução da
imagem original com um filtro de suavização (gaussiano), cujo desvio padrão
σ controla a extensão espacial do mínimo espacial do mínimo local de ∏ .
De acordo com o cálculo de variações, o contorno υ (s) que minimiza ε (υ ) deve
satisfazer a equação de Euler-Lagrange:
−
∂ ⎛ ∂υ ⎞ ∂ 2
⎜ ω1
⎟+
∂s ⎝ ∂s ⎠ ∂s 2
⎛ ∂ 2υ ⎞
⎜⎜ ω 2 2 ⎟⎟ + ∇ ∏ (υ ( s )) = 0
⎝ ∂s ⎠
Eq. 10
esta equação diferencial parcial expressa o balanço das forças internas e
externas quando o contorno atinge o equilíbrio, [13].
4.2.10.4 Modelos deformáveis dinâmicos Apesar de ser natural interpretar a minimização da energia como um
problema estático, uma abordagem interessante para determinar o mínimo
local de um funcional como o da equação 7 é construir um sistema dinâmico
36
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher governado pelo funcional que permita que o sistema evolua para o equilíbrio. O
sistema pode ser construído aplicando-se os princípios da mecânica
lagrangiana, obtendo-se modelos deformáveis dinâmicos que unificam as
descrições da forma e do movimento, permitindo assim a possibilidade de
quantificar não só formas estáticas mas também a evolução de uma forma ao
longo do tempo. Os modelos dinâmicos exibem comportamento com
significado intuitivamente físico, o que torna as suas evoluções apropriadas
para interagirem com um utilizador, [13].
Um exemplo simples é uma snake dinâmica que pode ser representada pela
introdução de um contorno variante no tempo υ ( s, t ) = ( x ( s, t ), y ( s, t ))T com
densidades de massa μ (s) e de amortecimento γ (s) . As equações de
movimento de Lagrange para uma snake com energia interna dada pela
equação 8 e energia externa dada pela equação 9 é, [13]:
μ
∂ 2υ
∂υ ∂ ⎛ ∂υ ⎞ ∂ 2
− ⎜ ω1
*
γ
⎟+
∂t ∂s ⎝ ∂s ⎠ ∂s 2
∂t 2
⎛ ∂ 2υ ⎞
⎜⎜ ω 2 2 ⎟⎟ = − Δ ∏ (υ ( s, t ))
⎝ ∂s ⎠
Eq. 11
Os dois primeiros termos do lado esquerdo desta equação diferencial
parcial representam as forças de inércia e de amortecimento; os termos
remanescentes representam as forças internas de estiramento e de flexão,
enquanto o lado direito representa as forças externas. O equilíbrio é obtido
quando o somatório das forças internas e externas é nulo e o contorno atinge o
repouso ∂υ ∂t = ∂ 2υ ∂t 2 = 0 a que corresponde a condição de equilíbrio da
equação 10, [13].
4.2.10.5 Discretização e simulação numérica De maneira a determinar-se numericamente uma solução de energia
mínima é necessário discretizar a função de energia ε(v). A abordagem usual é
representar o modelo geométrico contínuo ν em termos de combinações
lineares de funções de base com suporte local ou com suporte global. O
modelo contínuo v(s) é representado de forma discreta por um vector {u} para
37
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher os parâmetros da forma associados com as funções de base. A forma discreta
da energia ε(v) da snake pode ser escrita como:
E (u ) =
1 T
{u} [K ]{u}+ P({u})
2
Eq. 12
onde [K] é a matriz de rigidez e R({u}) é a versão discretizada do potencial
externo, [13].
A solução para o mínimo de energia resulta fixando o gradiente da equação 12
igual a 0; tal é equivalente a resolver o sistema de equações algébricas:
[ k ]{u} = −∇{P} = { f }
Eq. 13
onde { f } é o vector de forças externas generalizadas, [13].
A versão discreta das equações dinâmicas Lagrangianas dadas pela equação
11 pode ser escrita por um conjunto de equações às diferenças ordinárias de
segunda ordem em
⎧ .. ⎫
⎧ .. ⎫
[ M ]⎨u ⎬ + [c]⎨u ⎬ + K {u} = { f }
⎩ ⎭
⎩ ⎭
Eq. 14
onde [M] é a matriz de massa e [C] é a matriz de amortecimento. As derivadas
em ordem ao tempo na equação 11 são aproximadas por diferenças finitas e
métodos explícitos ou implícitos de integração temporal são utilizados para
simular o sistema ordinário de equações diferenciais resultante, em termos dos
parâmetros da forma {u}, [13].
4.2.11 – Modelos deformáveis probabilísticos
Uma abordagem alternativa para os modelos deformáveis deriva da
resolução do processo de ajuste do modelo utilizando métodos probabilísticos.
Tal permite a incorporação de características conhecidas a priori em termos de
distribuições probabilísticas. Esta metodologia probabilística também possibilita
38
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher uma medida da incerteza dos parâmetros estimados para a forma depois do
ajuste do modelo aos dados da imagem, [13].
Seja u a representar os parâmetros da forma do modelo deformável com
uma probabilidade a priori p(u) nos seus parâmetros. Seja p(f\ u) o modelo de
sensor de imagem – a probabilidade de produzir uma imagem f dado um
modelo u . O teorema de Bayes:
p(u \ f ) =
p ( f \ u ) p (u )
p( f )
Eq. 15
expressa a probabilidade a posteriori p(u\f) de um modelo dada a imagem, em
termos do modelo da imagem e das probabilidades a priori do modelo e da
imagem, [13].
4.3 Conclusão
O desenvolvimento deste capítulo teve como objectivo analisar
metodologias de segmentação automática ou semiautomática de imagens
médicas. Foram descritos alguns métodos e algoritmos para esse efeito.
39
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Capitulo V
Ferramentas Desenvolvimento
e
Linguagens de Programação
40
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher 5. Ferramentas Desenvolvimento e Linguagens de
Programação
O MATLAB® pode ser usado como uma linguagem de programação ou
como uma ferramenta de cálculo interactiva. Em ambos os casos, o ambiente
MATLAB permite realização de cálculos, visualização de resultados e
desenvolvimento de algoritmos usando uma sintaxe muito próxima da notação
matemática standard, [5].
Por isso, será a ferramenta preferencial a utilizar durante a fase de
desenvolvimento e testes deste projecto.
O C++ é uma linguagem de programação de alto nível que poderá ser
também uma ferramenta de desenvolvimento deste projecto, pois durante a
fase de pesquisa, verificou-se que muitos investigadores que têm trabalhado
nesta área têm adoptado esta linguagem de programação.
Esta escolha poderá dever-se a velocidade de processamento das
imagens entre uma e outra ferramenta, ficando o MATLAB claramente a perder
neste aspecto de comparação com o C++ mas ganhando claramente no que
diz respeito à facilidade de utilização.
Durante a fase de pesquisa que envolveu esta fase inicial do projecto
foram encontradas algumas bibliotecas de programação utilizadas em MATLAB
e C++ para processamento de imagem, tais como:
•
Biblioteca 1 – OpenCV [12]: biblioteca de funções em C++ que
implementam alguns dos algoritmos mais usuais no domínio da Visão
Computacional;
•
Biblioteca 2 – Peter’s Matlab Functions for Computer Vision and Image
Analysis [10]: pacote de funções em Matlab de Visão 3D e
processamento e análise de imagens;
•
Biblioteca 3 – Torr’s Matlab Toolkit [11]: com uma interface gráfica em
Matlab, utiliza a técnica SFM entre duas imagens;
41
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher •
Biblioteca 4 – Depth Discontinuities by Pixel-to-Pixel Stereo [17]:
programa
em
C,
que
retorna
os
mapas
descontinuidades entre duas imagens rectificadas.
42
de
disparidade
e
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Capítulo VI
Conclusões
e
Perspectivas Futuras
43
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher 6.Conclusões
A disciplina de Monografia teve como principal objectivo, adquirir
conhecimentos de base teórica e conhecer o estado da arte no que diz respeito
ao tema de segmentação de imagem, de forma a se poder iniciar a Dissertação
em causa. Para tal, efectuou-se uma pesquisa bibliográfica inicial sobre
metodologias computacionais de segmentação de estruturas representadas em
imagens médicas, estudou-se as estruturas anatómicas presentes nas imagens
da cavidade pélvica feminina e também se seleccionou a(s) plataforma(s)
computaciona(is) a utilizar para implementar as metodologias a desenvolver.
As próximas etapas deste projecto irão concentrar-se na selecção
experimentação de alguns métodos descritos na literatura. Contudo, houve dois
artigos que despertaram especial atenção e que poderão servir como ponto de
partida para este projecto, que foram:
•
Betrouni N., Vermandel M., A framework for 3D reconstruction of human organs
from MR images: a model and fuzzy set principles based approach. Application
to prostate segmentation and reconstruction. • Juliana Fernandes Camapum, Alzenir O.Silva, Alan N. Freitas,
Hansenclever de F. Bassani, Flávia Mendes O.Freitas; Segmentation of
Clinical Structures from Images of the Human Pelvic Área; Computer
Society.
Para o futuro (ano lectivo 2008/2009) irá desenvolver-se e implementar-se
metodologias computacionais de segmentação automática apresentadas nesta
Monografia e aplicá-las a imagens da cavidade pélvica da mulher de modo a
segmentar as estruturas anatómicas presentes.
44
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher Bibliografia
[1] – Mudry K., Plonsey R., Bronzino J.; Biomedical Imaging; CRC PRESS,,
2003.
[2] – N. Perdigão, João Manuel R.S.Tavares, J.A.C.Martins, E.B.Pires, R.M.N.
Jorge; Sobre a Geração de Malhas Tridimensionais Para Fins Computacionais
- Congreso de Métodos Numéricos en Ingenieria.
[3] – Alexandre F., Jorge R.N, Tavares J; Segmentação e construção 3D de
estruturas em imagens médicas: Comparação entre uma metodologia
“automática” e outra “manual”.
[4] - R. C. Gonzalez and R. E. Woods, Digital Image Processing. Prentice Hall,
second edition, 2001.
[5] – Crespo X.,Currel N.,Currel C.;Grande Enciclopédia das Ciências –
Anatomia; EDICLUBE, 1998.
[6] - http://pt.wikipedia.org/wiki/F%C3%ADsica_m%C3%A9dica (Data de
acesso:11/7/2008).
[7] - http://pt.wikipedia.org/wiki/Medicina_nuclear (Data de acesso:11/7/2008).
[8] - http://pt.wikipedia.org/wiki/Radiologia (Data de acesso:11/7/2008).
[9] - http://pt.wikipedia.org/wiki/Imagem_digital (Data de acesso:11/7/2008).
[10] - http://pt.wikipedia.org/wiki/DICOM (Data de acesso:11/7/2008).
[11] - I. N. Bankman, Handbook of Medical Imaging-Processing and Analysis.
Academic Press, 2000.
45
Segmentação de Estruturas em Imagens da Cavidade Pélvica da Mulher [12] – Juliana Fernandes Camapum, Alzenir O.Silva, Alan N. Freitas,
Hansenclever de F. Bassani, Flávia Mendes O.Freitas; Segmentation of Clinical
Structures from Images of the Human Pelvic Área; Computer Society, .
[13] – João Tavares, Tese Doutoramento: Análise de Movimento de Corpos
Deformáveis usando Visão Computacional, Faculdade Engenharia
Universidade do Porto, Julho 2000.
46