1.5
O oscilador harmónico unidimensional
A energia potencial do oscilador harmónico é da forma
kx2
,
U=
2
(1.29)
onde k é a constante de elasticidade e x a deformação da mola. Substituindo
(1.29) em (1.24) obtemos
Z x
dx
q
t − t0 =
,
kx2
2E
x0
−
m
m
t1 − t0 =
Z
x0
Efectuando a mudança de variáveis
r
k
x,
y=
2E
temos
1
t − t0 = q
2E
m
Z
y
y0
r
x
q
dx
q
2E
1−
m
dx =
r
2E
dy
p
=
k
1 − y2
.
k 2
x
2E
2E
dy
k
r
m
arcsin(y)|yy0 ,
k
(1.30)
p
R
visto que dy/ 1 − y 2 = arcsin(y). Supondo que arcsin(y0 ) = 0, e invertendo
(1.30) obtemos
r
k
(t − t0 ),
arcsin(y) =
m
"r
#
r
2E
k
x=
sin
(t − t0 ) .
(1.31)
k
m
A equação (1.31) define a lei de movimento do oscilador harmónico. A frequência
das oscilações é dada por
r
k
ω=
m
e a amplitude de oscilação
r
2E
A=
k
é proporcional à raiz quadrada da energia do oscilador. Este mesmo facto vamos
encontrar frequentemente nos diferentes ramos da Fı́sica, por exemplo, no estudo
de todos os fenómenos ondulatórios.
10
A escolha y0 = 0 está relacionada com a escolha das condições iniciais: y0 6= 0
implicaria o aparecimento de uma fase
δ0 = arcsin(y0 )
na equação (1.31),
x=
1.6
r
2E
sin
k
"r
#
k
(t − t0 ) + δ0 .
m
Movimento unidimensional de um sistema
conservativo: energia versus posição
A energia de uma partı́cula que se move ao longo de uma linha rectilı́nea sujeita
à força f (x), conservativa, é dada por
E=
m 2
x + U(x).
2
(1.32)
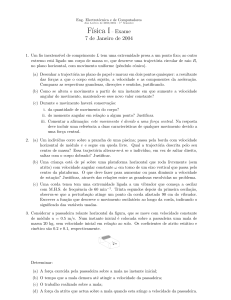
Seja U(x) uma função contı́nua representada na figura 1.3 em função de x.
Representamos pela linha paralela ao eixo dos x a energia mecânica da partı́cula.
V(x)
E
x0
x1
x4
x2
x
5
x3
x
Figure 1.3: Energia potencial U (x) em função de x
Da equação (1.32) e do gráfico podemos tirar as seguintes conclusões:
• De (1.32) temos que a energia cinética da partı́cula é dada por
1
T = mx2 = E − U(x).
2
(1.33)
A energia cinética nunca poderá ser negativa o que implica que
E ≥ U(x).
11
(1.34)
No gráfico existem dois intervalos para os quais a condição (1.34) não é
satisfeita
x ∈ [x1 , x2 ] e x ∈ [x3 , ∞[.
Estas zonas são zonas proibidas e a partı́cula nunca será encontrada nestes
intervalos.
• A distância da recta E à curva U(x) representa a energia cinética. Nos
pontos x1 , x2 e x3 ela é nula, no ponto x0 ela é máxima. Os pontos x1 , x2 e
x3 são chamados pontos de retorno. Nestes pontos a velocidade da partı́cula
anula-se, invertendo-se o sentido de acordo com a sua posição.
• Uma partı́cula sujeita à energia potencial representada por U(x) e com
energia E pode ter dois tipos de movimentos de acordo com a sua posição:
– Pode deslocar-se entre ]∞, x1 ]. Este movimento só é limitado num
lado. A partı́cula pode aproximar-se do ponto x = x1 vinda do infinito
x = −∞. No ponto x1 a sua velocidade anula-se e muda de sentido. A
partı́cula então afasta-se indefinidamente. Este movimento é ilimitado.
– A partı́cula move-se no intervalo [x2 , x3 ]. Este movimento é limitado
em ambos os lados. Consideremos uma partı́cula que parte da posição
x = x2 no sentido dos x crescentes. A sua velocidade no sentido
positivo do eixo dos x aumenta até ao ponto x = x0 seguidamente
diminui até x = x4 , volta a aumentar até x = x5 e a partir de x5
diminui até x3 onde se anula e passa a ser negativa (movimento no
sentido dos x decrescentes) passando a partı́cula pelos pontos x5 , x4 , x0
até voltar a atingir x2 . É um movimento limitado, periódico com
perı́odo
Z x3
dx
q
T (E) = 2
.
(1.35)
2
x2
(E − U(x))
m
O perı́odo T é função de energia da partı́cula e é igual ao dobro do
tempo que a partı́cula demora a percorrer a distância entre x2 e x3 .
Na Fig. 1.2 identificamos várias posições para as quais
dU
= 0,
dx
nomeadamente x = 0, x0 , x4 , x5 . Nestes pontos a força exercida sobre a partı́cula
é nula, F~ = −(dU/dx)î = 0. Se a partı́cula tiver velocidade nula nestas posições
ela vai manter-se nessa posição indefinidadmente. Dizemos que estes pontos são
pontos de equilı́brio. No entanto, é importante distinguir entre pontos como x0 ,
onde a segunda derivada da função é positiva
d2 U > 0, equilı́brio estável
dx2 x=x0
12
e pontos como x4 , onde a segunda derivada da função é negativa
d2 U < 0, equilı́brio instável.
dx2 x=x4
Aos primeiros chamamos pontos de equilı́brio estável e aos segundos pontos de
equilı́brio instável. No caso de um ponto de equilı́brio estável, quando a partı́cula
é desviada da posição de equilı́brio a força exercida sobre ela vai obrigá-la a voltar
à posição de equilı́brio. No caso de um ponto de equilı́brio instável, quando a
partı́cula é desviada da posição de equilı́brio a força exercida sobre ela vai afastála desse ponto.
1.7
Movimento de um electrão sob o efeito de
um campo eléctrico e magnético constantes
Bibliografia: French-Newtonian Mechanics-pg. 467
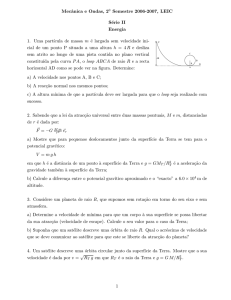
Vamos fazer o estudo do movimento de um electrão sob o efeito de um campo
eléctrico e um campo magnético constantes. Supomos que temos um par de
placas paralelas à distância d uma da outra, montadas dentro de um tubo onde
existe o vácuo e ligadas a uma bateria de modo a existir um campo eléctrico
uniforme de intensidade E = V /d entre as placas, de acordo com a figura 1.4. As
y
V
B
d
0
x
Figure 1.4: Tubo catódico com condensador
placas estão colocadas entre os polos de um magnete que cria um campo uniforme
perpendicular ao plano do papel. Supomos que os electrões, de carga q = −e,
começam o seu movimento a partir da placa debaixo com uma velocidade muito
pequena. Os electrões poderão ser libertados por um processo foto-eléctrico.
A força magnética, sendo perpendicular à direcção do movimento do electrão,
FB = −ev ∧ B,
13
não realiza trabalho e a energia do electrão é dada por
E=
V
m
V
m 2
v − e y = (vx2 + vy2 ) − e y.
2
d
2
d
(1.36)
A última parcela representa a energia do electrão no campo eléctrico. A energia
mecânica (1.36) é expressa em termos de vx , vy e y, e, devido à escolha da origem
da energia potencial, é nula visto que para y = 0, v = 0. Podemos transformar
este problema num problema unidimensional eliminando vx em função de y. O
campo eléctrico só pode acelerar o electrão na direcção do eixo dos y. O movimento na direcção do eixo dos x é apenas devido ao campo magnético B. Assim,
a componente da lei de Newton segundo o eixo dos x é dada por
m
d2 x
= −e (v ∧ B)x ,
dt2
ou ainda, visto que B = −B k̂,
d2 x
m 2 = evy B.
dt
Integrando a última equação com a condição v = 0 no ponto y = 0, obtemos
dx
eB
=
y = ω0 y.
dt
m
(1.37)
Finalmente, substituindo a última equação na expressão (1.36), determinamos a
energia mecânica do electrão apenas em função de y e vy ,
E=0=
m 2
V
(vy + ω02 y 2 ) − e y.
2
d
Tudo se passa como se a partı́cula executasse um movimento unidimensional
sujeita a um potencial efectcivo
Uef =
V
m 2 2
ω0 y − e y.
2
d
(1.38)
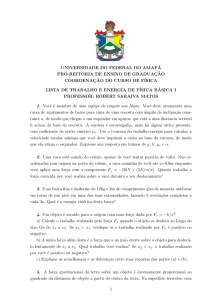
Seja ya = eV /(mdω02) = V m/(edB 2 ). Na figura 1.5 representamos a função Uef em
função de y, correspondendo a uma parábola de vértice no ponto (Uef = m2 ω02ya2 ,
y = ya ), como é fácil de concluir se reescrevermos (1.38) na forma
Uef =
m 2
m
ω0 (y − ya )2 − ω02 ya2 , .
2
2
Substituindo E = 0 e U = Uef (y) na equação (1.24) obtemos
14
(1.39)
Uef
0
2
2y
ya
y
a
2
-m ω ya /2
0
Figure 1.5: Energia potencial Uef (y)
t − t0 =
Z
y
y0
dy
q
,
ω02ya2 − ω02 (y − ya )2
Z z
1
dz
√
=
, z = y/ya − 1,
ω0 z0 1 − z 2
1
(arcsin(y/ya − 1) − arcsin(y0 /ya − 1))
=
ω0
Finalmente, sabendo que para t = 0, y0 = 0, e que arcsin(−1) = 3π/2, obtemos
y(t) = ya (1 + sin(ω0 t + 3π/2)) = ya (1 − cos(ω0 t)).
(1.40)
Determinamos x(t) integrando (1.37)
x(t) = ya (ω0 t − sin(ω0 t)) .
(1.41)
As equações (1.41) e (1.40) determinam a trajectória do electrão, representando
um cicloı́de na sua forma paramétrica, ver figura 1.6. É de notar que o valor
máximo de y é ymax = 2ya , e, que se 2ya ≥ d o electrão é absorvido pela placa
de cima não se obtendo a trajectória representada em 1.6. O valor de ymax =
2V m/(edB 2 ) poderá ser alterado variando B ou V .
y
2y a
0
π
2π
4π
3π
5π
Figure 1.6: Movimento do electrão no plano xy
15
6π
x/ ω 0
Chapter 2
Campo de forças centrais
2.1
Campo de forças centrais
Um campo de forças centrais é caracterizado por linhas de força com a direcção
da linha que une o corpo, no qual a força actua, e o corpo que produz o campo de
forças. Considerando uma partı́cula num campo de forças externo, o campo de
forças centrais é um campo de forças no qual a força que actua sobre a partı́cula
tem a direcção da linha que une a partı́cula a um ponto fixo, o centro do campo
de forças. A força F que actua na partı́cula será da forma
r
F = f (x, y, z) .
r
Este campo de forças é conservativo se o módulo de F apenas depender da
distância r ao centro de forças, i.e.
r
F = f (r) .
r
(2.1)
Teorema: Um campo de forças central é conservativo se uma das duas condições
é verificada:
1. a direcção da força é ao longo da linha que une a partı́cula a um ponto fixo
e a grandeza só depende da distância do ponto fixo à partı́cula.
2. a força deriva de uma função potencial que apenas depende da distância do
ponto fixo à partı́cula.
16
Estas duas condições são equivalentes. Consideremos a condição 2
∂U
∂U
∂U
ê1 +
ê2 +
ê3
F = −∇U(r) = −
∂x1
∂x2
∂x3
3
X
∂U
= −
êi
∂xi
i=1
3
X
dU ∂r
= −
êi ,
dr ∂xi
i=1
onde considerámos que U é apenas função de r. Substituindo
q
∂
2xi
∂r
xi
=
x21 + x22 + x23 = p
= ; i = 1, 2, 3,
2
2
2
∂xi
∂xi
r
2 x1 + x2 + x3
obtemos
3
1 dU X
dU r
F = −∇U(r) = −
xi êi = −
,
r dr i=1
dr r
considerando que 1r dU não é afectado pelo somatório no ı́ndice i e que
dr
3
X
xi êi = x1 ê1 + x2 ê2 + x3 ê3 = r.
i=1
Finalmente temos
dU(r) r
r
= f (r) .
dr r
r
F é uma força com a direcção do raio vector r que une a partı́cula ao centro do
campo de forças e cujo módulo apenas depende da distância r ao centro de forças.
Provámos que a condição 2 é equivalente à condição 1. O inverso também é
verdadeiro.
Seja F da forma
r
F = f (r) .
r
O trabalho elementar realizado por esta força durante o deslocamento dr é dado
por
f (r)
dw = F · dr =
r · dr.
r
Substituindo r · dr por rdr,
F=−
1
1
r.dr = d(r · r) = dr 2 = rdr,
2
2
obtemos
dw = f (r)dr.
17
O trabalho elementar dw apenas depende do valor inicial e final da variável r,
a distância ao centro de forças, e, portanto, F é uma força conservativa. Então
existe uma função potencial U(r) tal que
dw = −dU = f (r)dr
ou
F = −∇U,
visto que dU = ∇U · dr. 1
Provámos que as condições 1 e 2 do teorema são equivalentes. Falta agora
provar que se F é conservativo o módulo de F apenas depende de r ou que
U = U(r). Supomos que nada é conhecido acerca da dependência de |F| de r.
Partimos do facto que F é uma força central
r
F=f ,
r
(2.2)
F = −∇U.
(2.3)
e F deriva de um potencial
Multiplicando escalarmente (2.2) e (2.3) por dr e igualando ambas as expressões
obtemos
f
−∇U.dr = r · dr.
(2.4)
r
Vimos anteriormente que
r · dr = rdr
e
∇U · dr = dU.
Substituindo as últimas relações em (2.4) temos
−dU = f dr,
ou a função potencial U varia apenas quando a variável r varia. Então U é função
de r, U = U(r). Mas U = U(r) implica que
F = f (r)r̂,
como querı́amos demonstrar.
1
dU =
∂U
∂x dx
+
∂U
∂y dy
+
∂U
∂z dz
= ( ∂U
∂x ê1 +
∂U
∂y ê2
18
+
∂U
∂z ê3 ).(dxê1
+ dyê2 + dzê3 ) = ∇U · dr.