Mecânica Clássica II
Oscilações / 1
José Pinto da Cunha
Notas Lectivas
Universidade de Coimbra
2012
2
Conteúdo
1 Oscilações /parte 1
1.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Equações diferenciais lineares de coeficientes constantes . . . .
1.2.1 Equações diferenciais homogéneas . . . . . . . . . . . .
1.2.2 Equações diferenciais completas . . . . . . . . . . . . .
1.2.3 Análise das soluções da equação diferencial ẍ + aẋ +
bx = 0 . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 O oscilador livre . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Energia do oscilador linear . . . . . . . . . . . . . . . . . . . .
1.5 O oscilador linear amortecido . . . . . . . . . . . . . . . . . .
1.6 O oscilador forçado . . . . . . . . . . . . . . . . . . . . . . . .
1.6.1 Ressonância . . . . . . . . . . . . . . . . . . . . . . . .
1.7 Osciladores acoplados . . . . . . . . . . . . . . . . . . . . . . .
1.7.1 Análise da energia do sistema de osciladores . . . . . .
1.7.2 Análise das oscilações da molécula de CO2 . . . . . . .
1.7.3 Modos de oscilação molecular . . . . . . . . . . . . . .
1.8 Osciladores acoplados e forçados . . . . . . . . . . . . . . . . .
1.9 Sistema de N osciladores acoplados − transição para o contı́nuo
3
5
5
8
8
9
10
14
15
20
21
27
30
37
39
42
45
47
4
CONTEÚDO
Capı́tulo 1
Oscilações /parte 1
1.1
Introdução
As leis de Newton da Fı́sica Clássica são suficientes para descrever o movimento da matéria, desde corpos simples até aos sistemas mais complexos
(se as velocidades forem muito menores que a velocidade da luz no vazio e
excluirmos sistemas quânticos). Isso é assim porque essas leis (três) sistematizam a experiência concreta mais elementar.
i) A 1a lei diz que o movimento não pode ser definido só por si, em
absoluto, mas sim sempre em relação ao movimento do observador.
Que a velocidade de um corpo livre se mantém, pois que haverá um
observador para o qual esse corpo está em repouso e assim permanecerá.
ii) A 2a lei traduz formalmente a relação causal causa-efeito: - se agirmos
com uma força sobre um corpo alteramos a sua velocidade. É uma
relação entre as causas (as forças) e o efeito (a aceleração) em cada
partı́cula de matéria, i.e.,
efeito =
X
causas
;
~a =
P~
F
m
A equação assim escrita, serve ela própria como definição de uma força:
1N = 1m/s2 × 1kg. Esta eq. de Newton é uma lei consequente:
uma força origina uma aceleração; se houver força há necessariamente
aceleração; se há aceleração então é porque há força ou forças a actuar
nesse corpo.
5
6
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
11111111111111111111111111111
00000000000000000000000000000
Figura 1.1: Forças de interacção entre dois corpos.
iii) A 3a lei é mais subtil; representa a nossa experiência concreta de que um
corpo não age sobre si próprio, interage com a sua vizinhança. Traduz
a constatação de que não há auto-acções, apenas interacções. Ora, esta
contracção do termo inter-acção pressupõe a existência de uma acção
repartida entre dois entes. Um ente não age sobre o outro, interage com
ele. Se a acção se traduzir numa força, F~ , isso significa que, no acto da
inter-acção, se fará sentir essa acção (ou força) em cada um dos intervenientes. Porém, a acção será simétrica num e no outro. Se resultar
da interacção uma força F~ sobre o ente A, então resultará certamente
uma força −F~ sobre o ente B (ver fig.1.1). Costuma-se dizer que as
forças existem sempre em pares acção-reacção. Porém, tal designação é
infeliz, pois faz supor uma relação consequente: acção ; reacção. Mas
esta não pode ser estabelecida porque não parece possı́vel distinguir a
acção da reacção, pois que uma não existe sem a outra, nem ocorre
depois da outra, ao invés existindo total simetria entre ambas.
Toda a mecânica clássica pode pois ser construı́da sobre as leis fı́sicas
básicas sistematizadas por Newton. As interacções traduzem-se por forças,
que saberemos ou não escrever consoante o conhecimento que tenhamos das
interacções subjacentes e que, em geral, dependem das posições dos corpos.
A aceleração é como sabemos a derivada temporal da velocidade. Assim, a
lei de Newton traduz-se numa equação diferencial de 2a ordem no tempo (ou
1.1. INTRODUÇÃO
7
a sistemas de equações diferenciais se houver mais do que um corpo) do tipo1
m~¨r =
X
F~i (~r)
(1.1)
i
A descrição da posição do corpo em cada instante, ~r(t), e da sua velocidade, ~r˙ (t), dependem da resolução desta equação. Todavia, essa tarefa pode
revelar-se complicada, dependendo das forças em presença2 . Em muitos casos práticos, a eq. 1.1 pode ser resolvida analiticamente. Como é sabido
da teoria das equações diferenciais, a solução vai depender sempre de duas
constantes de integração, que é necessário adequar à situação fı́sica concreta, e que são geralmente a posição e a velocidade iniciais. Estes conceitos
tornar-se-ão mais claros quando aplicados a casos concretos, mais adiante.
Paradoxalmente a dificuldade primeira que se nos depara ao analisar uma
situação fı́sica concreta é a de escrever correctamente a equação causal de
Newton, eq.1.1. Há que identificar quais as interacções que estão presentes
e ter em mente que qualquer força é sempre parte de uma interacção; que
haverá sempre uma força simétrica a agir sobre o outro elemento envolvido
na interacção. Devemos também ser capazes de identificar inequivocamente
quem são os agentes causadores de cada uma das forças que julgamos estarem
a ser exercidas num corpo, i.e. que elementos da sua vizinhança estão a
interagir com ele. Se não os pudermos identificar então possivelmente nem
sequer existem, contrariamente ao que pensávamos. Para além disso, tem
que se convir que as interacções são sempre locais, i.e. um corpo só interage
com a sua vizinhança imediata. Mesmo quando há um campo envolvido, a
interacção dá-se entre o corpo e o campo que existe nesse local (p.ex. o peso
de um corpo é o resultado da interacção entre o corpo e o campo gravı́tico
da Terra que existe na posição em que está esse corpo). Não há acções à
distância.
1
Usa-se a notação compacta habitual que consiste em representar a derivada temporal
com uma pinta. Ou seja, por f˙ refere-se a derivada temporal de f , enquanto f ′ representa
a derivada espacial:
df
≡ f˙ ;
dt
2
d2 f
df
≡ f¨e
≡ f′ ;
dt2
dt
d2 f
≡ f ′′
dx2
Pode pois ser mais conveniente em muitas situações formular o problema recorrendo
à chamada mecânica analı́tica, nomeadamente a mecânica de Lagrange. Nesses casos, as
equações de movimento obtêm-se a partir das equações de Euler-Lagrange, uma por cada
grau de liberdade do sistema fı́sico.
8
1.2
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
Equações diferenciais lineares de coeficientes constantes
Vamos aqui rever brevemente alguns conceitos fundamentais acerca das
equações diferenciais mais simples, i.e. as equações diferenciais ordinárias,
lineares e de coeficientes constantes. Visto que as equações de Newton são
equações de 2a ordem no tempo, abordaremos apenas equações diferenciais
desse tipo.
1.2.1
Equações diferenciais homogéneas
Seja a equação diferencial
ẍ + aẋ + bx = 0
(1.2)
com a e b constantes. Esta equação diz-se homogénea pois o 2o membro é
nulo. Definindo o operador derivada, δ ≡ dtd e, a partir deste, o operador
polinomial Ω = δ 2 + aδ + b, podemos escrever a equação diferencial na forma
simbólica,
Ωx = 0
onde Ω é o operador que representa todas as operações a efectuar sobre x.
O polinómio que representa Ω tem duas raı́zes, r1 e r2 , e pode ser factorizado na forma,
Ω = (δ − r2 )(δ − r1 )
Portanto,
(δ − r2 ) {(δ − r1 )x} = 0
donde
(
ou
(δ − r1 )x = 0
(δ − r2 )x = 0
qualquer das duas equações dá dx
= r dt e tem solução do tipo x = Aert ,
x
com A constante. Por conseguinte, a solução geral da eq. 1.2 é
x(t) = Aer1 t + Ber2 t
(1.3)
onde A e B são duas constantes de integração. Como se vê pois, o número
de constantes de integração é igual à ordem da equação diferencial.
1.2. EQUAÇÕES DIFERENCIAIS LINEARES DE COEFICIENTES CONSTANTES9
O argumento anterior falha no caso em que r1 = r2 = r. Nesse caso, pelo
argumento anterior, (δ 2 − r)2 x = 0 ; x = Aert + Bert = Cert . Todavia,
esta solução só depende de uma constante de integração pelo que está pois
certamente incompleta. No caso vertente, a solução geral é do tipo
x = (A + Bt)ert
(1.4)
já que a equação 1.2 fica (δ − r)(δ − r)(A + Bt)ert = (δ − r)Bert = 0.
As raı́zes r1 e r2 podem ser reais ou complexas. Em qualquer caso, a
solução fı́sica de um problema real será obviamente sempre real, sendo em
geral dada pela parte real da solução matemática.
As constantes de integração obtêm-se num problema concreto particular obrigando a solução geral da equação a satisfazer certas condições do
problema em causa − são as chamadas condições fronteira.
1.2.2
Equações diferenciais completas
A equação diferencial diz-se completa se o 2o membro for não nulo. No caso
mais geral o 2o membro da equação é uma função do tempo, i.e.,
Ωx = f (t)
(1.5)
A solução geral desta equação é dada por
x(t) = xG (t) + xP (t)
(1.6)
onde xG é a solução geral da equação homogénea correspondente, ΩxG = 0,
acima discutida, e xP é a solução particular da equação completa, ΩxP =
f (t). É fácil de perceber que x = xG + xP é de facto a solução da eq.1.5, já
que
Ω(xG + xP ) = |Ωx
+ ΩxP = f (t)
{zG}
=0
|
{z
por def.
}
A solução particular pode ser formalmente escrita como
xP = Ω−1 f (t)
(1.7)
onde Ω−1 é o operador inverso de Ω, tal que Ω Ω−1 = 1 (i.e. Ω−1 representa
a operação inversa de Ω, sendo por isso uma espécie de integração3 ).
3
Assumimos sem discussão que o operador inverso existe em todo o domı́nio de Ω.
10
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
Concluı́mos assim que a solução mais geral da eq. completa deve incluir
também a solução da eq. homogénea. Neste caso há também obviamente
duas constantes de integração que devem ser determinadas pelas condições
fronteira do problema, p.ex. pelas condições iniciais de posição e de velocidade.
1.2.3
Análise das soluções da equação diferencial ẍ +
aẋ + bx = 0
Aalisemos as soluções da equação diferencial,
ẍ + aẋ + bx = 0 , ou seja, (δ 2 + aδ + b)x = 0
(1.8)
com a e b constantes. As raı́zes do polinómio simbólico (caracterı́stico) são
a 1√ 2
δ=− ±
a − 4b
2 2
sendo a solução da equação diferencial dada pelas expressões 1.3 ou 1.4,
consoante o caso, como vimos.
É conveniente discutir separadamente os casos, em função do argumento
da raiz quadrada, c2 = a2 − 4b : ou seja, consoante i) c2 > 0; ii) c2 = 0; ou
iii) c2 < 0.
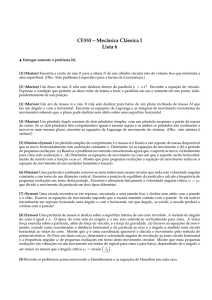
i) c2 > 0 No caso em que c2 > 0, a solução de 1.8 é do tipo
a
n
c
c
x(t) = e− 2 t Ae 2 t + Be− 2 t
o
A forma genérica desta solução está representada na fig.1.2a.
ii) c2 = 0 No caso de c2 = 0, as duas raı́zes são iguais pelo que a solução
tem a forma
a
x(t) = (A + Bt)e− 2 t
Esta solução está representada na fig.1.2b.
iii) c2 < 0 Se c2 < 0 as duas raı́zes são complexas. Por conveniência
faze√
mos c2 = √
−4ω 2 = 4i2 ω 2 , com ω 2 = b − (a/2)2 > 0, e i = −1. Deste
modo, ± 12 a2 − 4b = ±iω. Assim,
a
n
x(t) = e− 2 t Aeiωt + Be−iωt
o
(1.9)
1.2. EQUAÇÕES DIFERENCIAIS LINEARES DE COEFICIENTES CONSTANTES11
Esta é a solução matemática e é uma solução complexa. Todavia, se
esta solução representar uma solução fı́sica deve ser real. Portanto,
impondo essa condição à solução, ficamos com4
A + B = C = no real
A − B = −iD = no imaginário puro
com C e D constantes arbitrárias. Fica então
a
x(t) = e− 2 t (C cos ωt + D sin ωt)
Esta expressão sugere que se faça a transformação5
(
C = x0 cos ϕ
D = x0 sin ϕ
com x0 e ϕ constantes arbitrárias. Obtemos assim6 ,
a
x(t) = x0 e− 2 t cos(ωt + ϕ)
Esta solução é claramente oscilatória, de frequência angular ω, e amplitude que tende exponencialmente para zero. Podemos vê-la na (ver
fig.1.2c).
Exemplo: queda de um corpo
Com vista a concretizar o que se acabou de dizer analisemos o movimento
de um corpo de massa m que cai no ar com atrito viscoso (laminar), proporcional à velocidade. A aceleração da gravidade é g, sendo a posição do
4
Usamos aqui a relação de Euler eiθ = cos θ + i sin θ.
É sempre possı́vel fazer esta transformação, trata-se apenas de redefinir constantes
arbitrárias.
6
De um ponto de vista mais geral, veja-se que podemos sempre escrever a solução
complexa (eq. 1.9) na forma
a
x(t) = e− 2 t |x0 |ei(ωt+ϕ)
p
com x0 = (A + B)2 + (A − B)2 e ϕ = atan A−B
A+B , sendo esta uma fase. A solução fı́sica
é a parte real deste no complexo,
5
a
x(t)|fis = ℜe {x(t)} = e− 2 t |x0 | cos(ωt + ϕ)
12
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
x(t)
x(t)
x(t)
t
t
a)
b)
t
c)
Figura 1.2: Soluções da equação diferencial de movimento. a) c2 > 0; b)
c2 = 0; c) c2 < 0.
corpo descrita em cada instante pelo vector ~x = xî (ver fig.1.3). Supõem-se
as seguintes condições iniciais:
em t = 0,
(
x=0
ẋ = 0
As forças que actuam no corpo são o peso, P~ = mg î, e a força de atrito,
que é por hipótese do tipo F~a = −γ ẋ î, com γ uma constante (a força de
atrito tem direcção contrária à velocidade, ~v ≡ ~x˙ = ẋî).
A eq. de Newton é
mg î − γ ẋ î = mẍ î
(1.10)
ou seja,
γ
ẋ = g
m
γ
A solução da equação homogénea obtém-se das raı́zes do polinómio, δ 2 + m
δ=
0,
γ
γ
δ=−
±
2m 2m
ẍ +
−1
γ
g, ou seja, procedendo por tentativa
δ
A solução particular é xP = δ 2 + m
e erro à operação de derivação (à semelhança do que se faz na divisão), faz-se
g
2
γ
δ +
δ
gm
t
0
γ
m
1.2. EQUAÇÕES DIFERENCIAIS LINEARES DE COEFICIENTES CONSTANTES13
F
i^
v
P
x
Figura 1.3: O movimento de um corpo em queda livre, com atrito viscoso,
F~a = −γ~v .
e obtém-se (verifique)
xP =
gm
t
γ
Portanto, a solução geral da eq. 1.10 é então
γ
x(t) = Ae− m t + B +
gm
t
γ
com A e B constantes, concluindo-se ainda que
ẋ(t) = −A
γ − γ t gm
e m +
m
γ
As constantes de integração, A e B, são determinadas pelas condições iniciais
do problema,
t=0 :
(
A + B = 0 ; A = −B
2
+ gm
= 0 ; A = mγ 2g
− Aγ
m
γ
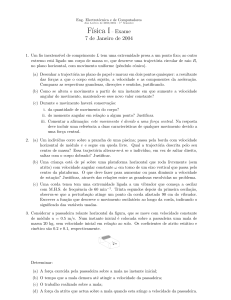
A posição, velocidade e aceleração do corpo em causa são pois dados em
cada instante por (ver fig.1.4),
(
)
mg m − γ t
e m −1 +t
x(t) =
γ
γ
γ mg
ẋ(t) =
1 − e− m t
γ
γ
ẍ(t) = ge− m t
(1.11)
(1.12)
(1.13)
14
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
..
x(t)
.
x(t)
x(t)
t
a)
t
t
b)
c)
Figura 1.4: Posição, velocidade e aceleração do corpo em queda livre com
atrito viscoso.
A aceleração tende para zero com o decorrer do tempo, pois a força de atrito
vai crescendo durante a queda proporcionalmente ao aumento da velocidade
até ser equivalente ao peso que o faz cair. Por isso a velocidade tende para
um valor constante − a velocidade terminal7 .
1.3
O oscilador livre
Analisemos agora o caso em que uma mola de massa desprezável e constante
elástica K é pendurada num ponto fixo e suporta um corpo de massa m (ver
fig. 1.5). A mola representa aqui um sistema elástico linear, caracterizado por
ter uma força de interacção directamente proporcional à perturbação a que o
sistema for sujeito. Supõe-se por hipótese que a mola tem um comprimento
natural ℓ0 . Qualquer variação desse comprimento traduz uma perturbação
da mola, sendo x = ℓ − ℓ0 a medida da perturbação. Tratando-se de um
sistema linear, a força elástica é por conseguinte F~ = −K~x, onde ~x é o
vector posicional da extremidade da mola em cada instante, com origem na
posição natural, não perturbada8 .
Não havendo atrito, a eq. de Newton escreve-se
P~ + F~ = m ~a
ou mais explicitamente,
¨ = mẍî ,
mg î − Kxî = m~x
7
8
ou seja, ẍ +
Não fora isso e as gotas de chuva na cabeça PIM! (ai!).
Esta é no essencial a lei de Hook.
K
x=g
m
(1.14)
1.4. ENERGIA DO OSCILADOR LINEAR
15
000 11
111
00
111
000
00
000 11
111
lo
O
i^
F
x
P
x
Figura 1.5: O movimento de um corpo suspenso de uma mola vertical sem
massa.
q
Esta equação toma a forma (δ 2 + ω 2 ) x = g, com ω = K/m, e tem por
solução x = xG +xP , com xG a solução da eq. homogénea e xP = (δ 2 +ω 2 )−1 g,
a solução particular9 . A solução da equação é então
mg
+ x0 cos(ωt + ϕ)
(1.15)
x=
K
, que é a posição
Concluı́mos assim que a oscilação se dá em torno do ponto mg
K
de equilı́brio estático do sistema corpo-mola (ver fig.1.6).
1.4
Energia do oscilador linear
Seja um oscilador livre e sem atrito (ver fig. 1.7). A força, F~ , exercida pela
mola no corpo de massa m faz variar a sua energia cinética, de
dT = F~ · d~ℓ
fazendo-a aumentar se a força for na direcção do movimento. Visto que
p
, e d~ℓ = ~v dt, então
F~ = d~
dt
dT = m
9
d~v ~
· dℓ = m~v · d~v
dt
Neste caso a operação de integração/derivação dá (”armou-se a conta” como faz com
a divisão)
2
δ + ω 2
g
g
0
ω2
16
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
x(t)
mg
K
t
Figura 1.6: Oscilação do corpo suspenso da mola vertical.
E
Emec
Ep
F
00
11
11
00
00
11
00
11
00
11
00
11
00
11
00
11
xo
Ek
O
xo
x
i^
O
xo
a)
xo
x
b)
Figura 1.7: a) Oscilador simples sem atrito. b) A energia cinética e potencial
do oscilador em função amplitude de oscilação.
donde10
T =
Z
0
v
mv dv =
mv 2
2
Pode-se também definir uma energia potencial elástica para o sistema11 .
A energia potencial é uma ”energia em potência” que está armazenada no
sistema, que se libertará em resultado da interacção com ele (neste caso
através da força elástica). Isto é, a força elástica há-de ser sempre de molde
a fazer baixar a energia potencial do sistema, transferindo-a neste caso para
dv̂
N.B. ~v = vv̂, e d~v = dvv̂ + vdv̂, sendo dv
dt v̂ a aceleração tangencial e v dt a aceleração
normal (pois dv̂ ⊥ v̂). Logo ~v · d~v = v dv + 0.
11
Como é sabido, a energia potencial só tem significado
se a força for conservativa
H
(rotacional nulo). É esse o caso de F~ = −K~x, pois C F~ · d~ℓ = 0, num movimento de
vai-vem.
10
1.4. ENERGIA DO OSCILADOR LINEAR
17
o movimento do corpo,
−dV = F~ · d~ℓ
Por conseguinte, d(T + V ) = 0 ou Emec = T + V = constante, se não houver
atrito. No caso presente, F~ = −K~x, pelo que a variação de energia potencial
é dV = K~x · d~x, quando d~x é a perturbação do sistema em relação à sua
posição de equilı́brio. Assim,
V (x) − V (0) =
Z
Kx2
2
x
K~x · d~x =
0
É frequente referir a energia potencial elástica relativamente à posição de
2
equilı́brio, fazendo V (0) = 0. Fica então simplesmente V (x) = Kx
.
2
Vemos que a energia potencial é mı́nima na posição de equilı́brio,
crescendo parabolicamente com o afastamento em relação a essa posição. As
posições de equilı́brio do oscilador não perturbado podem pois ser definidas
como os pontos que correspondem a mı́nimos da energia potencial. Este conceito é sobremaneira importante para a análise de sistemas complexos. De
facto, um sistema se for perturbado oscilará em geral em torno do mı́nimo
de energia em que se encontre e a que corresponde uma certa posição de
equilı́brio estável. Tal não faz desse sistema necessariamente um oscilador
linear, com energia potencial parabólica (ver fig. 1.8). Porém, para oscilações
pequenas em torno do mı́nimo a energia potencial é quasi parabólica, sendo
as oscilações aproximadamente harmónicas. Este argumento é válido para
qualquer sistema, mecânico ou não. No regime de pequenas oscilações o sistema (qualquer que ele seja) constitui um oscilador harmónico. Porém, se a
amplitude de oscilação for aumentada, o oscilador é em geral anarmónico e
as oscilações podem ser assimétricas.
Na fig. 1.8 representa-se a energia potencial de um sistema em função da
distância interatómica, r. Esta função é caracterı́stica p.ex. de uma molécula
diatómica. Neste caso, mesmo não se tratando de um oscilador harmónico,
a energia potencial é aproximadamente parabólica em torno do mı́nimo, e
portanto o sistema tem um comportamento de oscilador harmónico para
pequenas oscilações. De facto, expandindo V (x) em série de Taylor à volta
do mı́nimo, com x = r − r0 , temos
∂V ∂ 2 V x2
V (x, . . .) = V (0) +
+ ···
x+
∂x 0
∂x2 0 2
(1.16)
18
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
Ep
ro
ro
r
O
Figura 1.8: Energia potencial tı́pica de um sistema ligado. Se for perturbado,
o sistema oscila em torno do mı́nimo de energia, em r = r0 .
U
(eV)
6
4
2
0
−2
ro
.5
1
1.5
r
(nm)
−4
−6
Figura 1.9: Energia potencial da molécula de NaCl (a energia do infinito é
necessária para ionizar o Na e o Cl).
Ou seja,
Kx2
V (x) ≈ V (0) +
;
2
∂ 2 V com K =
∂x2 x=0
(1.17)
= 0. Esta conclusão é muito
já que em x = 0 há um mı́nimo e portanto ∂V
∂x
importante: − a análise da curva de energia do sistema permite-nos extrair
informação acerca das suas caracterı́sticas elásticas, e portanto da frequência
de oscilação (podendo falar-se de uma constante elástica equivalente ainda
que esta não tenha nada a ver com molas).
Exemplo:
Seja a molécula diatómica de NaCl (que forma uma ligação iónica do
tipo Na+ Cl− ). O mı́nimo de energia desta molécula ocorre para a distância
1.4. ENERGIA DO OSCILADOR LINEAR
19
interatómica r0 = 0.193 nm (ver 1.9)12 . Em primeira aproximação a energia
∼
potencial para r > r0 segue de perto a energia electrostática entre as 2 cargas
efectivas Na+ e Cl− ,
1 e2
V =
4πǫ0 r
sendo V (r0 ) =
1 e2
4πǫ0 r0
≈ −7.45 eV. Então
d2 V
dx2
!
=
r0
1 e2
=K
2πǫ0 r03
i.e. K ≈ 564.78 N/m. Assim, no limite das pequenas oscilações, a molécula
tem oscilações harmónicas de frequência
ω=
s
K
µ
(1.18)
onde µ é a massa efectiva13 . Substituindo valores obtém-se f = ω/2π ∼
1013 Hz. Esta frequência é caracterı́stica da radiação do infravermelho. Pelo
facto destas frequências serem próximas ocorre, por um processo de ressonância, elevada transferência de energia da radiação da banda do infravermelho para as moléculas, aumentando a sua energia vibracional, e por essa
via a temperatura. Esta é a razão por que nos aquecemos usando o fogo e
não p.ex. uma lâmpada fluorescente (cuja luz até é mais energética).
12
A curva de energia potencial resulta essencialmente da atracção coulombiana entre os
iões (dominante a distâncias r > r0 ) e da repulsão entre os dois núcleos atómicos, que
domina quando eles ficam próximos, para r < r0 (e se veem um ao outro despidos da
respectiva nuvem de e− ). Se for perturbado, este sistema oscilará em torno de r0 .
13
A interacção entre dois corpos, 1 e 2, pode ser descrita em função do movimento
relativo entre eles. As forças de interacção que actuam em cada um deles são simétricas
uma da outra, F~ = F~2 = −F~1 . A posição relativa é ~r = ~r2 − ~r1 , e portanto ~¨r = ~r¨2 − ~r¨1 .
Os movimentos dos dois corpos são então equivalentes ao de uma massa reduzida, µ, que
tenha essa aceleração ~¨r, isto é,
F~2
F~1
F~
=
−
;
µ
m2
m1
e portanto essa massa reduzida é
µ=
donde,
m 1 m2
m1 + m2
1
1
1
=
+
µ
m2
m1
20
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
000
111
111
000
000
111
000
111
000
111
000
111
000
111
000
111
lo
F
111
000
000
111
000
111
000
111
000
111
000
111
000
111
000
111
O
Fa
x
x
i^
Figura 1.10: O oscilador amortecido.
A frequência acima calculada, ainda que obtida no estrito domı́nio da
fı́sica clássica (i.e. apesar de não se usar a mecânica quântica), dá, apesar
disso, a ordem de grandeza correcta das frequências vibracionais moleculares.
1.5
O oscilador linear amortecido
Trata-se aqui de considerar um oscilador linear, com atrito. Analisaremos
somente o caso em que a força de atrito é proporcional à velocidade, Fa ∝ v.
Um oscilador é linear se uma perturbação, x, em relação à posição de
equilı́brio der como resposta uma força de retorno a essa posição directamente
proporcional à perturbação, i.e. se F~ = −K~x. Esta força é a força elástica,
sendo K a constante elástica do sistema. Esta é no essencial a lei de Hooke.
O caso mais simples de entender é o de uma mola de massa desprezável.
Porém, como vamos ver, as mais das vezes o sistema oscilante não é constituı́do por qualquer mola. Ainda assim, é costume, mesmo nesses casos,
representar pictoricamente um sistema elástico como uma mola. Neste caso
vamos considerar que a posição de equilı́brio é no ponto Q, tendo a mola
o seu comprimento natural, ℓ0 . A perturbação x mede o afastamento em
relação a essa posição.
Seja um oscilador linear constituı́do por uma mola de constante elástica
K e massa desprezável, a que está ligado um corpo de massa m. O movimento faz-se no plano horizontal com atrito viscoso, sendo F~a = −γ~v , γ uma
constante e ~v a velocidade em cada instante. A posição de equilı́brio (posição
natural) é dada por ℓ0 . A perturbação x mede o afastamento em relação a
essa posição (ver fig.1.10). Pretende-se estudar o movimento do corpo. As
1.6. O OSCILADOR FORÇADO
21
forças relevantes estão representadas na figura. A lei de Newton escreve-se
¨ = F~a + F~ = −γ ~x˙ − K~x
m~x
¨ = ẍ î. Isto é,
com ~x = x î, ~x˙ = ẋ î e ~x
ẍ +
K
γ
ẋ + x = 0
m
m
(1.19)
Fazendo ζ = γ/m e ω02 = K/m, a eq. diferencial fica
(δ 2 + ζδ + ω02 )x = 0
Dado que as raı́zes do polinómio caracterı́stico são δ = − ζ2 ±
então as soluções da eq. diferencial são (com η 2 = (ζ 2 − 4ω02 ))
i)
ii)
ζ
η
η
1
2
q
ζ 2 − 4ω02 ,
x(t) = e− 2 t Ae 2 t + Be− 2 t ; se η 2 > 0
− ζ2 t
x = (A + Bt)e
− ζ2 t
iii) x = e
q
iωt
A1 e
(1.20)
; se η 2 = 0
+ A2 e
−iωt
(1.21)
− ζ2 t
= Ae
2
cos(ωt + ϕ) ; se η <(1.22)
0
onde ω = ω02 − ζ 2 /4. As soluções da equação estão representadas na
fig.1.11a−c. Todas as soluções decrescem exponencialmente para zero devido ao atrito. No caso ii) o amortecimento é muito rápido e designa-se por
amortecimento crı́tico. Há casos práticos em que se pretende esse comportamento, p.ex. nos amortecedores de automóveis. Porém, a solução mais interessante que nos interessa aqui considerar é a solução iii), porque é essa que
corresponde a oscilações
(amortecidas) do objecto preso à mola. A frequência
q
2
de oscilação é ω = ω0 − ζ 2 /4. Esta frequência é ligeiramente menor do que
a frequência do oscilador livre correspondente, pois com ζ = 0, ω = ω0 =
Na fig.1.12 representa-se o caso de um sistema harmónico amortecido.
1.6
q
K
.
m
O oscilador forçado
Consideremos um oscilador harmónico forçado por uma acção exterior
periódica de frequência ω. Para concretizar, supomos que o oscilador é constituı́do por uma mola de massa desprezável, a que se encontra preso um
corpo de massa m, que se move com atrito Fa ∝ −v. O corpo é solicitado em
22
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
x(t)
x(t)
x(t)
t
t
a)
t
b)
c)
Figura 1.11: Soluções de um oscilador amortecido. a) amortecimento rápido;
b) amortecimento crı́tico; c) solução oscilatória.
x(t)
111
000
mg
K
t
1111111111
0000000000
1111111111
0000000000
a)
b)
Figura 1.12: Exemplo de um oscilador amortecido sujeito a uma força de
atrito visoso. b) A oscilação em função do tempo.
111
000
000
111
000
111
000
111
000
111
000
111
000
111
000
111
lo
111
000
000
111
000
111
000
111
000
111
000
111
000
111
000
111
000
111
Fe
O
Fa
F
x
i^
Figura 1.13: O oscilador forçado.
1.6. O OSCILADOR FORÇADO
23
cada instante por uma força periódica do tipo F (t) = F0 cos ωt, sendo ω a
frequência da acção exterior, que pode ser qualquer (ver fig.1.13). As forças
que actuam no corpo são a força elástica, F~e = −K~x, a força de atrito,
F~a = −γ ~x˙ e F~ = F0 cos ωt î, com K, γ e ω constantes. A lei de Newton
escreve-se
γ
K
F0
ẍ + ẋ + x =
cos ωt
m
m
m
Fazendo ζ =
tem-se
γ
m
e ω02 =
K
m
Ora,
(ω0 é a frequência natural do sistema sem atrito),
δ 2 + ζδ + ω02 x =
F0
cos ωt
m
q
ζ 1
δ=− ± η,
com η = ζ 2 − 4ω02
2 2
com η real ou imaginário. A solução desta equação é pois x = xG + xP , com
ζ
η
xG (t) = e− 2 t Ae 2 t + Be
xP (t) = ℜe
−η
t
2
δ 2 + ζδ + ω02
−1 F
0
m
eiωt
isto é14
xP
(
F0
m
)
eiωt
= ℜe
−ω 2 + iζω + ω02
)
(
F0
eiωt [(ω02 − ω 2 ) − iζω]
=
ℜe
2
m
(ω02 − ω 2 ) + ζ 2 ω 2
n
o
F0 /m
i(ωt−ϕ)
=
ℜe
|Z|e
2
(ω02 − ω 2 ) + ζ 2 ω 2
14
Note que a operação inversa da derivação é a primitivação e que
Aplicando por tentativa e erro a derivação-primitivação:
eiωt δ 2 + ζδ + ω02
0
−ω 2
eiωt
+ iωζ + ω02
R
eαx dx =
1 αx
αe .
24
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
x(t)
a)
t
x(t)
t
b)
c)
x(t)
t
Figura 1.14: A oscilação de um oscilador forçado em função do tempo.
onde se fez Z = (ω02 − ω 2 ) − iζω = |Z|e−iϕ . Ou seja, (ver fig. 1.15),
xP (t) = A cos(ωt − ϕ)
com
A = A(ω) = q
e
F0 /m
2
(ω02 − ω 2 ) + ζ 2 ω 2
tan ϕ =
ω02
onde ζ = γ/m é o coeficiente de atrito.
Resulta assim, finalmente, que
ζ
ζω
− ω2
x(t) = e− 2 t Aeηt + Be−ηt + A cos(ωt − ϕ)
(1.23)
(1.24)
(1.25)
(1.26)
A solução do oscilador forçado é assim constituı́da por duas partes. A 1a
parcela representa o comportamento transitório, que tende exponencialmente
para zero e rapidamente se extingue. A 2a parcela representa o regime estacionário. Decorrido tempo suficiente, o sistema oscila com a frequência do
oscilador exterior de modo permanente, enquanto essa acção persistir15 (ver
fig. 1.14). A amplitude de oscilação (1.24) é fortemente dependente da
frequência com que o sistema é excitado do exterior. Quando ω ∼ ω0 , a
amplitude atinge o valor máximo. Nesse caso, a diferença de fase entre a
acção externa e a oscilação é π/2 (ver fig. 1.16)16 .
15
16
Isto é, o sistema protesta inicialmente mas depois cala-se e faz o que lhe mandam.
O leitor deve pensar um pouco na questão até perceber porque é que quando o oscilador
1.6. O OSCILADOR FORÇADO
25
A(ω)
Ao
18
Q=30
14
Q=10
10
8
6
Q=3
4
2
0
0.2 0.4 0.6
1.0
1.4
1.8
ω
ωo
Figura 1.15: A amplitude de oscilação de um oscilador forçado em função da
frequência da acção externa, para diferentes valores do parâmetro de atrito,
Q = ωγ0 . Se o atrito for muito baixo e ω ∼ ω0 , o sistema pode entrar em
rotura e ser destruido.
ϕ(ω)
Q=30
Q=10
Q=3
π
2
0
0.2 0.4 0.6
1.0
1.4
1.8
ω
ωo
Figura 1.16: A diferença de fase entre a acção externa e a oscilação para
vários valores do parâmetro de atrito Q = ωγ0 , em função da frequência dessa
acção externa.
26
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
A(w)
(cm)
4
ϕ
180
o
3
2
90
o
1
0
o
0.4 0.6 0.8 1.0
0
1.2
ω (Hz)
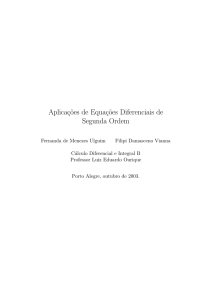
Figura 1.17: Curvas de ressonância observadas em sistema fı́sicos. Amplitude de oscilação e diferença de fase medidas para um oscilador mecânico
semelhante ao da fig. 1.12
Quando ω ≈ ω0 dizemos que há ressonância. A importância do atrito está
exemplificada na fig.1.15, em função de Q = ω0 /γ. Este factor Q designa-se
por figura de mérito ou ”Quality factor”. Sendo adimensional caracteriza
convenientemente o sistema. O coeficiente Q é infinito se não houver atrito
e tende para zero se ele for muito elevado. Não havendo atrito, ζ = 0, e
A(ω = ω0 ) = ∞. Nesse caso, ou se ζ for muito pequeno, dá-se a disrupção
do oscilador.
Como se pode observar, o valor máximo de A(ω) não ocorre exactamente em ω0 , mas essa diferença é muito pequena e em geral ignora-se17 .
Na fig. 1.17 representam-se medidas experimentais efectuadas com um oscilador forçado18 .
O fenómeno de ressonância é seguramente dos conceitos mais importantes
da Fı́sica, estando presente nos mais diversos domı́nios quer da Fı́sica Clássica
quer da Mecânica Quântica. Com efeito, a capacidade de interacção com um
sistema e a resposta que resulta dessa interacção dependem fortemente da
frequência com que excitarmos esse sistema.
tem máxima oscilação a diferença de fase é π/2. Note que quer a oscilação quer a força
são sinusoidais, ambas com a mesma frequência. Em condições óptimas, no instante em
que o oscilador está na posição de máxima amplitude e inicia o movimento de retorno, a
força externa deve ser nula, crescendo a partir daı́ até atingir o seu valor máximo quando
x = 0.
17
O máximo está de facto em ω0′ = κω0 , onde κ = (1 − ζ 2 /4ω02 ) é em geral κ ≈ 1.
18
Vide French; Vibration and Waves.
1.6. O OSCILADOR FORÇADO
1.6.1
27
Ressonância
Analisemos agora como é que varia a potência que é transferida para um
oscilador forçado. Da definição de potência19 ,
P =
dw
F~ · d~ℓ
=
= F~ · ~x˙ = F0 ẋ cos ωt
dt
dt
No regime estacionário,
x = A cos(ωt − ϕ)
ẋ = −Aω sin(ωt − ϕ)
Então, a potência média (média temporal) no regime estacionário é
< P > = −F0 Aω hcos(ωt) sin(ωt − ϕ)i
= −F0 Aω hcos(ωt) (sin(ωt) cos ϕ − cos(ωt) sin ϕ)i
D
E
= F0 Aω cos2 (ωt) sin ϕ + 0
pois cos ωt sin ωt é uma função ı́mpar.20 Visto que ϕ não depende do tempo
e que < cos2 ωt >= 12 , fica
F0 Aω
sin ϕ
2
F02 ω
1
ζω
q
q
=
2m (ω 2 − ω 2 )2 + ζ 2 ω 2 (ω 2 − ω 2 )2 + ζ 2 ω 2
<P > =
0
0
Como se vê da expressão anterior, < P > é dominado por frequências na
vizinhança de ω0 , ω ∼ ω0 , sendo muito pequeno fora dessa região. Mas, na
zona em que < P > é significativo, ω02 −ω 2 = (ω0 +ω)(ω0 −ω) ≈ 2ω0 (ω0 −ω),
e portanto
1
F 2ζ
(1.27)
< P >≈ 0
8m (ω0 − ω)2 + ζ42
19
Como vimos, a oscilação dá-se na direcção da força e com a mesma frequência desta,
~
F = F î e ~x = xî.
RT
20
O valor médio de uma função f (t) sobre o perı́odo T = 2π/ω é < f >= T1 0 dt f (t).
28
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
f(x)
f
max
Γ
µ
1f
2 max
x
Figura 1.18: Curva Lorentziana ou curva de Cauchy, com média µ e largura
Γ.
Esta curva de potência é máxima para ω = ω0 . A essa frequência é máxima
a transferência de energia por unidade de tempo para o oscilador, vinda
do exterior. Em regime estacionário, a amplitude de oscilação mantém-se
constante se ω for constante (cf. eq.1.24), o que significa que a energia
dissipada é compensada pela energia injectada no sistema por unidade de
tempo.
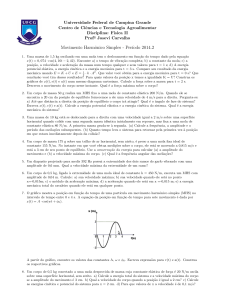
A curva de potência da eq. 1.27 é caracterı́stica de qualquer ressonância: − é uma Lorentziana. De facto, independentemente da natureza
do fenómeno subjacente, a ressonância tem geralmente a forma de uma
curva Lorentziana21 . A forma Lorentziana da curva de transferência de energia observa-se em qualquer ressonância, quer em sistemas mecânicos, quer
em fenómenos electromagnéticos, quânticos, etc., apesar de ser diferente a
fenomenologia. Em quaisquer dos casos, as ressonâncias evidenciam-se pela
sua forma tı́pica. A secção eficaz de interacção com um sistema apresenta
picos de ressonância caracterı́sticos da interacção em causa. Por exemplo,
os espectros moleculares, os espectros de absorção, a produção de partı́culas
sub-atómicas, etc., todos evidenciam o mesmo padrão de ressonância (ver
figs. 1.19 e 1.20) e têm uma largura intrı́nseca que é descrita por uma curva
Lorentziana.
21
Uma Lorentziana ou curva de Cauchy é uma curva semelhante a uma Gaussiana. A
sua forma geral é
Γ/2
1
f (x) =
π (x − µ)2 + Γ42
onde µ é a média e Γ a largura a meia altura. O factor 1/π apenas normaliza a área da
curva à unidade.
1.6. O OSCILADOR FORÇADO
29
−
CO
2
N
H
+
NH
3
N−H
CO
2
3000
C−H
2000
1000
k
(1/cm)
Figura 1.19: Curvas de ressonância observadas em sistema fı́sicos. Espectro
de absorção de uma substância no infravermelho; os picos de absorção correspondem a curvas de ressonância e são caracterı́sticos de oscilações moleculares bem definidas.
dσ
dΩ
e+e −
Z
o
ν ν
30
20
10
0
88
90
92
94
E (GeV)
cm
Figura 1.20: Curvas de ressonância observadas em sistema fı́sicos. Secção
eficaz da reacção de aniquilação e+ e− → Z0 → ν ν̄ (colisão electrão-positrão,
com criação de um estado intermédio, e posterior decaimento num neutrino
e num antineutrino), em função da energia do centro de massa. A interacção
dá-se à escala sub-atómica, a ∼ 10−15 m.
30
1.7
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
Osciladores acoplados
Em geral os osciladores não existem isolados, interagem com outros osciladores, nomeadamente se eles fizerem parte de um sistema que contenha
vários deles. O acoplamento de osciladores é por isso um conceito muito
importante.
Cada oscilador tem a sua equação de movimento, que não há-de ser independente das equações dos restantes osciladores seus vizinhos, com os quais
interactua. Essas equações serão por hipótese todas lineares. Assim, em
princı́pio deve ser possı́vel combinar as equações de movimento e construir
novas coordenadas que sejam combinação linear das coordenadas originais, e
satisfaçam equações diferenciais desacopladas. Tais coordenadas designamse por coordenadas normais. Associado a cada uma dessas coordenadas deve
existir um modo de vibração que há-de ser independente dos restantes, pois
que nessas coordenadas as equações são independentes umas das outras (estão
desacopladas). Ou seja, deve haver um modo de vibração por cada uma das
coordenadas normais. Esses modos, designam-se por modos normais de vibração ou também modos próprios de vibração. Não sabemos ainda como
serão esses modos, pois ainda não analisámos a questão, mas podemos antecipar que em qualquer deles todas as partes do sistema oscilam com a mesma
frequência e em fase, visto que as coordenadas normais já não descrevem o
movimento de qualquer das suas partes, mas o sistema propriamente dito,
globalmente. Na fig. 1.21 ilustram-se os modos normais de três sistemas
diferentes com osciladores acoplados. O problema que aqui se coloca é então
como obter esses modos a partir das equações de movimento.
Um sistema constituı́do por N osciladores acoplados, haverá um por cada
grau de liberdade do sistema, é descrito por N equações diferenciais e terá
portanto N modos normais. A oscilação desse sistema pode pois ser descrita na forma de uma sobreposição dos seus modos próprios, já que as
coordenadas originais de cada oscilador se podem escrever como uma combinação linear das coordenadas normais22 , descrevendo estas últimas movimentos de frequência bem definida. Esta conclusão foi tirada primeiramente
por Bernoulli em 1753.
Se o sistema for iniciado num dos modos normais assim continuará, não
interagindo com os outros modos (pois eles são independentes). Todavia, se
22
Visto que as coordenadas normais já são uma combinação linear das coordenadas
originais, estão serão uma espécie de combinação linear inversa daquela.
1.7. OSCILADORES ACOPLADOS
31
00
11
11
00
00
11
00
11
00
11
1
0
0
1
0
1
0
1
0
1
0
1
a)
00
11
11
00
00
11
00
11
00
11
1
0
0
1
0
1
0
1
0
1
b)
00
11
11
00
00
11
00
11
00
11
1
0
0
1
0
1
0
1
0
1
0
1
11
00
00
11
00
11
00
11
00
11
0
1
1
0
0
1
0
1
0
1
0
1
111
000
000
111
c)
d)
1111
0000
0000
1111
e)
1111
0000
0000
1111
111
000
000
111
f)
Figura 1.21: Modos normais de oscilação de dois osciladores acoplados. a)
e b) modos longitudinais; c) e d) modos transversais; modos de oscilação de
dois pêndulos acoplados.
32
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
11
00
00
11
00
11
00
11
00
11
00
11
K
Fc
Fa
xa
Kc
Fb
Fc
K
1
0
0
1
0
1
0
1
0
1
xb
Figura 1.22: Acoplamento de dois osciladores.
assim não for, se o movimento de oscilação se iniciar numa outra configuração
qualquer, então a energia disponı́vel será distribuı́da entre os diferentes modos
normais do sistema.
Por ser de mais fácil apreensão, analisemos primeiramente um caso do
domı́nio do concreto. Consideremos 2 massas iguais ligadas entre si como se
mostra na fig.1.22. Ignoramos o atrito e o peso das massas.
A figura pode interpretar-se como representando dois osciladores iguais,
acoplados através de uma mola de constante elástica, Kc . Trata-se aqui de
analisar o comportamento de osciladores que estão acoplados entre si. Os
conceitos envolvidos e as conclusões a que chegarmos ultrapassam porém o
sistema particular da fig. 1.22.
Neste caso o sistema é descrito por duas equações diferenciais acopladas,
uma por cada corpo (se o movimento for apenas longitudinal). Para simplificar a exposição consideramos que por hipótese Ka = Kb = K e desprezamos
o atrito e as massas das molas. Cada bola está ligada a 2 molas e é através
desses pontos de ligação que interage quer com a outra bola, quer com a
parede (ver fig. 1.22).
Num certo instante sejam ξa e ξb as perturbações na posição de equilı́brio
de cada bola, respectivamente. As forças que actuam são F~a = −K~xa , F~b =
−K~xb e F~c = −Kc (xa − xb ) î (ver fig. 1.22). A equação de Newton para cada
bola é então,
(
−Kxa î − Fc î = mẍa î
(1.28)
−Kxb î + Fc î = mẍb î
Ou seja,
(
−Kxa − Kc (xa − xb ) = mẍa
−Kxb + Kc (xa − xb ) = mẍb
(1.29)
Obtêm-se assim 2 equações diferenciais acopladas que, por estarem acopladas,
não são independentes uma da outra nem podem ser resolvidas separadamente.
1.7. OSCILADORES ACOPLADOS
33
Supomos por hipótese, a priori, que há 2 modos normais de vibração de
frequências ω1 e ω2 . À posteriori verificaremos a consistência dessa hipótese.
Por modo normal entende-se aquele em que todas as partes do sistema oscilam com a mesma frequência, em movimentos sincronizados.
Querendo obter a configuração dos modos normais nada melhor do que
supôr que o sistema está a oscilar num modo normal e observar o seu comportamento nesse estado. Suponha-se pois a priori que o sistema está a oscilar
num modo normal. Então o movimento de cada parte (i.e. de cada bola)
deve ser da forma,
xa = a cos(ωt + ϕ) ;
xb = b cos(ωt + ϕ) ;
2
ẍa = −ω a cos(ωt + ϕ)
(1.30)
2
ẍb = −ω b cos(ωt + ϕ)
com a, b e ϕ constantes. As eqs. diferenciais podem então ser escritas na
forma matricial
−(K + Kc )
Kc
Kc
−(K + Kc )
!
a
b
!
= −mω
2
a
b
!
(1.31)
A equação anterior é uma equação de valores próprios do tipo, Au = λu,
onde u representa as amplitudes de cada um dos elementos osciladores e λ
os valores próprios da matriz A. A solução não trivial desta equação é dada
pela equação secular |A − λI| = 0, isto é,
(A − λI)u = 0 ; |A − λI| = 0
(1.32)
Os valores próprios da matriz, e os vectores próprios correspondentes, obtêmse resolvendo a equação secular. No caso em apreço, a equação secular é
o que dá
(K + K ) − ω 2 m
c
−Kc
−Kc
(K + Kc ) − ω 2 m
=0
(1.33)
(K + Kc − mω 2 )2 − Kc2 = 0 ; K + Kc − mω 2 = ±Kc
donde
q
ր ω1 = q K
m
ω=
ց ω2 = K + 2 Kc
m
m
(1.34)
34
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
Obtêm-se assim dois valores possı́veis para a frequência de oscilação. Ou
seja, existem dois modos normais de oscilação com frequências ω1 e ω2 , que
são por isso as frequências normais ou frequências próprias (ou frequências
ressonantes caracterı́sticas) do sistema. Ainda não sabemos, porém, como é
que são esses modos normais, i.e., qual é a sua configuração.
As amplitudes relativas dos dois osciladores em cada um dos modos normais são descritas pelos vectores próprios da matriz:
a) Se ω = ω 1 , então da eq. 1.31
−(K + Kc ) + K
Kc
Kc
−(K + Kc ) + K
ou
a−b
a−b
!
=0
!
a
b
!
=0
(1.35)
; a=b
q
Ou seja, o modo com frequência ω1 = K/m caracteriza-se pelo facto
de as duas bolas oscilarem para o mesmo lado, em fase e com a mesma
amplitude; a mola central neste caso é um mero espectador, pois não
contribui para o movimento.
b) Se ω = ω 2 , então da eq. 1.31
−(K + Kc ) + K + 2Kc
Kc
Kc
−(K + Kc ) + K + 2Kc
i.e.,
a+b
a+b
!
!
a
b
!
=0
(1.36)
; a = −b
q
ou seja, no modo com frequência ω2 = K/m + 2Kc /m, as bolas oscilam em cada instante com movimentos opostos, com a mesma amplitude.
Os estados próprios que se obtêm são precisamente os modos de oscilação
representados na fig. 1.21a e b.
A solução geral do sistema de equações diferenciais 1.29 é dada pela combinação linear das soluções anteriores,
xa
xb
!
= A1
1
1
!
cos(ω1 t + ϕ1 ) + A2
1
−1
!
cos(ω2 t + ϕ2 )
1.7. OSCILADORES ACOPLADOS
35
Em resumo:
i) o sistema de osciladores acoplados tem modos próprios de vibração;
ii) as frequências desses modos são dadas pelos valores próprios da matriz
que descreve a dinâmica do sistema, no caso presente,
ω1 =
s
K
m
e ω2 =
s
Kc
K
+2
m
m
iii) a configuração do sistema em cada um dos modos próprios é dada pelos
vectores próprios respectivos. No caso vertente
u1 =
e nesses estados,
u2 =
u1 ←
u2 ←
(
(
a
a
!
a
−a
=a
!
=a
1
1
!
1
−1
!
(1.37)
xa = a cos(ω1 t + ϕ1 )
xb = a cos(ω1 t + ϕ1 )
(1.38)
xa = a cos(ω2 t + ϕ2 )
xb = −a cos(ω2 t + ϕ2 )
(1.39)
iv) os modos próprios são pois modos colectivos de oscilação, nos quais
todas as partes do sistema oscilam em fase, todas com a mesma
frequência. Quando o sistema está num desses estados os outros estados próprios têm amplitude zero;
v) a solução mais geral do problema é uma combinação linear dos estados
próprios, os quais formam uma base ortogonal de vectores23 .
(
xa = A1 cos(ω1 t + ϕ1 ) + A2 cos(ω2 t + ϕ2 )
xb = B1 cos(ω1 t + ϕ1 ) + B2 cos(ω2 t + ϕ2 )
(1.40)
f∗ , os valores
Em geral, nos casos com significado fı́sico, a matriz é hermı́tica, A† ≡ A
próprios são números reais e os vectores próprios são ortogonais entre si (valores próprios
degenerados, os correspondentes vectores próprios de valores próprios degenerados podem
ser combinados e ortogonalizados). Sejam dois vectores próprios: Auj = λj uj e Auk =
23
36
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
sendo as constantes tais que B1 = A1 e B2 = −A2 , de acordo com a
configuração do estado próprio respectivo, e ϕ1 e ϕ2 duas fases constantes. Ou seja, pode-se de facto descrever o sistema de osciladores
na forma de uma combinação linear dos seus modos normais, como lá
atrás se anteviu.
Exemplo:
Seja o sistema da fig. 1.22. Por hipótese, no instante inicial, t = 0, o
sistema satisfaz as condições fronteira iniciais
t=0 :
(
xa = A , ẋa = 0
xb = 0 , ẋb = 0
(1.41)
Quais são concretamente as equações de movimento de cada bola? A solução
da eq. 1.40 deve satisfazer estas condições iniciais,
A = A1 cos ϕ1 + A2 cos ϕ2
0 = A1 cos ϕ1 − A2 cos ϕ2
0 = A1 ω1 sin ϕ1 + A2 ω2 sin ϕ2
0 = A1 ω1 sin ϕ1 − A2 ω2 sin ϕ2
donde, 2ω1 sin ϕ1 = 0 ⇒ ϕ1 = 0 ; ⇒ ϕ2 = 0. Isto significa que
(
A1 + A2 = A
A1 − A2 = 0
⇒
A1 = A2
A1 = A2
Por conseguinte, neste caso,
(
xa (t) = A2 (cos ω1 t + cos ω2 t)
xb (t) = A2 (cos ω1 t − cos ω2 t)
(1.42)
λk uk , com j = 1, 2, . . . e k = 1, 2, . . ., então
u†k Auj = λj u†k uj
u†j Auk = λk u†j uk
∗
P
P ∗
†
∗
∗
=
mas, se A = A† , (u†j Auk )∗ =
u
A
u
ℓn
nk
ℓj
ℓn unk Aℓn uℓj = uk Auj . Então,
ℓn
u†k Auj = λ∗k u†k uj e
(λj − λ∗k )u†k uj = 0
ր
ց
se j = k ⇒ λ = no real
se j =
6 k ⇒ uk ⊥ uj
(vide p.ex. Mathews Walker; Mathematical Methods of Physics).
1.7. OSCILADORES ACOPLADOS
37
xa
x
b
t
Figura 1.23: A oscilação de cada um dos osciladores acoplados da fig. 1.22
pode apresentar batimentos. Nesse caso a energia do sistema oscila alternadamente entre um modo e o outro.
isto é,24
xa (t) = A cos ω1 −ω2 t cos ω1 +ω2 t
2
2 xb (t) = A sin ω1 −ω2 t sin ω1 +ω2 t
2
(1.43)
2
Estas equações representam duas funções sinusoidais moduladas periodicamente (ver fig. 1.23). Ou seja, em casos como o presente, devido à sobreposição de modos de vibração, pode surgir um efeito de batimentos (ver
fig. 1.23). A energia do sistema, que é proporcional ao quadrado da amplitude de oscilação, oscila então entre os vários modos próprios. Ou seja,
a amplitude de oscilação da bola a baixa até se anular, quando a da outra
aumenta até ser máxima e vice-versa, periodicamente.
1.7.1
Análise da energia do sistema de osciladores
É possı́vel e muitas vezes útil analisar o problema de obter as equações de
movimento de um sistema de osciladores com base em considerações acerca
energia do sistema. Admitimos a priori que a energia de um sistema deixado
a si próprio é constante, se não houver atrito, e que, se este existir, a energia tende para zero, ao ser dissipada (por atrito) ao longo do tempo. Estas
condições são válidas quaisquer que sejam os movimentos das partes do sistema. Portanto, a sua aplicação deve conduzir-nos às respectivas equações
de movimento.
24
N.B. cos(α + β) + cos(α − β) = 2 cos α cos β.
38
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
Seja por hipótese um oscilador a 1 dimensão, amortecido por uma força
de atrito F~a = −γ ~x˙ (ver fig.1.13). A energia do oscilador em cada instante
escreve-se como
Kx2 mẋ2
E=
+
(1.44)
2
2
ainda que não saibamos a priori qual é a perturbação x(t) e a velocidade
ẋ(t). A variação de energia é dada pelo trabalho da força de atrito,
dE = F~a · d~ℓ
(1.45)
Logo, diferenciando a eq. 1.44 em ordem a x vem25 ,
Kxdx + mẋẍdt = −γ ẋdx ou seja, Kxẋ + mẋẍ = −γ ẋẋ
(1.46)
Obtém-se assim como resultado da equação de energia a equação diferencial
de movimento,
mẍ + γ ẋ + Kx = 0
(1.47)
que coincide com a lei de Newton do movimento.
Refira-se contudo que em geral é mais conveniente estudar a evolução do
Lagrangiano do sistema, L = T − V , aplicando para o efeito a equação de
Euler-Lagrange,
!
d ∂L
∂L
−
=Q
dt ∂ q̇
∂q
a cada uma das variáveis dinâmicas do sistema, {q, q̇}, (que são em número
igual ao número de graus de liberdade do sistema). Neste caso Q representa
as forças de atrito.
A condição de conservação de energia permite também obter as equações
de movimento do sistema da fig.1.22. Neste caso não há atrito e a energia
deve manter-se constante. A energia do sistema é dada em cada instante por
Kx2a Kx2b Kc
mẋ2a mẋ2b
+
+
(xa − xb )2 +
+
2
2
2
2
2
Não há dissipação de energia, pelo que dE = 0, i.e.,
E(xa , xb , t) =
dE = 0 ⇒
25
∂ ẋ2
∂x
∂E
∂xa
∂E
∂xb
=0
=0
1
Kxa + Kc (xa − xb ) + mẋa ẍa ẋa = 0
;
Kxb − Kc (xa − xb ) +
mẋb ẍb ẋ1b
(1.48)
(1.49)
=0
Note que se f = f (x, t), df = ∂x f dx + ∂t f dt. No caso concreto acima, d(ẋ2 ) =
ẋ2
dx + ∂∂t
, dt = 2ẋẍ dt, pois a velocidade não depende explicitamente da posição.
1.7. OSCILADORES ACOPLADOS
K
m
ξ1
39
M
K
m
ξ3
ξ2
Figura 1.24: A molécula de CO2 .
onde se usou a regra de derivação composta
∂f
∂x
=
∂f ∂t
.
∂t ∂x
Obtém-se então
Kxa + Kc (xa − xb ) + mẍa = 0
(1.50)
Kxb − Kc (xa − xb ) + mẍb = 0
Ora, estas são exactamente as equações diferenciais de movimento que se
obtiveram anteriormente a partir das leis de Newton (ver eqs. 1.29). Deixase a si obter estas equações pelo formalismo de Lagrange.
1.7.2
Análise das oscilações da molécula de CO2
Para ilustrar os conceitos e as técnicas acima discutidas vamos analisar as
oscilações de uma molécula triatómica, linear, simétrica, como é a molécula
de CO2 . O facto de ser um sistema linear simplifica muito o problema, pois
são mais fáceis de obter as equações de movimento. Na configuração de
equilı́brio, a molécula tem 2 átomos simetricamente dispostos em relação ao
átomo central (ver fig.1.24). As distâncias de equilı́brio são r0 . As massas
são m1 = m3 = m = mO e m2 = M = mC . As variáveis de posição
óbvias são as coordenadas de cada massa, x1 , x2 e x3 , respectivamente. Para
simplificar consideramos apenas as vibrações longitudinais ao longo do eixo
da molécula26 . Como vimos antes, para pequenas amplitudes as oscilações
são aproximadamente harmónicas; associamos-lhes uma constante elástica,
K, ainda que o potencial interatómico seja complicado.
Os desvios em relação às posições de equilı́brio são ξ1 , ξ2 e ξ3 , respectivamente (ver fig.1.24). A energia da molécula em cada instante é
E(ξ1 , ξ2 , ξ3 ) = T +V =
26
m ˙2 ˙2 M ˙2 K
K
(ξ1 + ξ3 )+ ξ2 + (ξ2 −ξ1 )2 + (ξ2 −ξ3 )2 (1.51)
2
2
2
2
Há também os modos de vibração transversais que são mais difı́ceis de calcular, mas
que se obtêm pela mesma técnica. Na análise espectral de substâncias que contenham o
grupo molecular CO2 observam-se ambos os modos de oscilação.
40
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
A conservação de energia impõe que27
∂ξ 1 E = 0
dE = 0 ; ∂ξ2 E = 0
∂ξ 3 E = 0
donde28
(1.52)
¨
mξ1 − K(ξ2 − ξ1 ) = 0
M ξ¨2 + K(ξ2 − ξ1 ) + K(ξ2 − ξ3 ) = 0
mξ¨3 − K(ξ2 − ξ3 ) = 0
(1.53)
Pondo o sistema a oscilar num modo próprio,
i(ωt+ϕ)
ξ1 = ae
ξ2 = bei(ωt+ϕ)
ξ3 = cei(ωt+ϕ)
(1.54)
obtém-se a equação matricial, Aξ = 0,
ξ1
K − ω2m
−K
0
2
2K − ω M −K
ξ2 = 0
−K
ξ3
0
−K
K − ω2m
(1.55)
cuja equação secular é |A| = 0. O cálculo do determinante dá a equação
cúbica em ω 2 ,
h
i
ω 2 (K − ω 2 m) K(M + 2m) − ω 2 M m = 0
cujas raı́zes são
ω1 = 0 ; ω2 =
s
K
; ω3 =
m
s
K
2m
1+
m
M
(1.56)
∂
.
sendo ∂ξ ≡ ∂ξ
28
Conclui-se o mesmo a partir do lagrangeano do sistema:
m ˙2 ˙2
K
M ˙2 K
2
2
L = T − V = (ξ1 + ξ3 ) −
ξ + (ξ2 − ξ1 ) + (ξ2 − ξ3 )
2
2 2
2
2
27
As equações de Euler-Lagrange,
mas equações diferenciais.
(d
dt)∂ξ̇ L−∂ξk L=0 ,
k
k = 1, 2, 3, dão-nos directamente as mes-
1.7. OSCILADORES ACOPLADOS
41
a)
ω1
b)
ω2
c)
ω
3
Figura 1.25: Modos de oscilação longitudinal da molécula de CO2 .
A 1a solução, com ω1 = 0, é aparentemente surpreendente, mas corresponde
ao movimento de translação rı́gida da molécula, como um todo. As outras
duas soluções correspondem a diferentes modos de oscilação.
Os estados próprios dão-nos a configuração dos modos de oscilação e são
dados pelo sistema de equações
K − ωj2 m
−K
0
a
2K − ωj2 M −K
b = 0
−K
c
0
−K
K − ωj2 m
(1.57)
Assim, se:
i) ω 1 = 0, obtém-se neste caso, obviamente, a = b = c. Ora, isto é
precisamente o que se espera num movimento de translação da molécula
(ver fig.1.25a).
q
ii) ω2 = K/m, neste caso os factores K − ω22 m anulam-se e fica b = 0
e a = −c. Neste modo, o átomo central está parado e outros vibram
simetricamente, como na fig.1.25b.
q
ii) ω3 = K/m(1 + 2m/M ), neste caso a 1a e 3a eqs. dão a = c. As
contas dão
a=c= q
1
2m(1 + 2m/M )
; b= q
1
2M (2 + M/m)
Este modo de oscilação está representado na fig. 1.25c.
(1.58)
42
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
1
0
0
1
0
1
0
1
0
1
1
0
0
1
0
1
0
1
0
1
l
1
0
0
1
0
1
0
1
0
1
0
1
1
0
0
1
0
1
0
1
ξ p−1
ξp
ξ p+1
Figura 1.26: Acoplamento de N osciladores a 1 dimensão
Os estados próprios são pois da forma
a
a
a
u1 =
a ; u2 = 0 ; u3 = b ;
a
−a
a
com
b
= −2m/M
a
O movimento geral dos átomos desta molécula em torno das posições de
equilı́brio é pois descrito por uma combinação linear dos estados próprios
anteriores,
i(ω1 t+ϕ1 )
+ A2 ei(ω2 t+ϕ2 ) + A3 ei(ω3 t+ϕ3 )
ξ1 = A1 e
ξ2 = B1 ei(ω1 t+ϕ1 ) + B2 ei(ω2 t+ϕ2 ) + B3 ei(ω3 t+ϕ3 )
ξ3 = C1 ei(ω1 t+ϕ1 ) + C2 ei(ω2 t+ϕ2 ) + C3 ei(ω3 t+ϕ3 )
(1.59)
m
A3 . A solução
com A1 = B1 = C1 , A2 = −C2 , B2 = 0, A3 = C3 e B3 = −2 M
fı́sica é obviamente ξ = ℜe{ξ}. Depois disto restam ainda 6 constantes de
integração por determinar, que são as posições e velocidades iniciais de cada
massa, a uma dimensão. Isto é, se nos disserem as posições e velocidades
iniciais de cada átomo, saberemos descrever (do ponto de vista clássico!) os
seus movimentos em qualquer instante posterior.
1.7.3
Modos de oscilação molecular
Num sistema com N osciladores a 1 dimensão cada massa pode ter 3 deslocamentos independentes, segundo x, y e z. Num tal sistema há pois 3N graus
de liberdade, e possui 3N modos independentes de vibração, que são os seus
modos próprios (ver fig. 1.28).
Suponha-se uma molécula constituı́da por um conjunto de N átomos,
ligados entre si por forças que mantêm o sistema em equilı́brio. Cada átomo
1.7. OSCILADORES ACOPLADOS
43
é uma massa pontual que possui 3 graus de liberdade, pois pode deslocar-se
em x, y e z. A molécula tem pois 3N graus de liberdade. Todavia, estes graus
de liberdade não correspondem todos eles a oscilações internas da molécula,
já que a molécula pode efectuar como um todo 3 movimentos de translação
e 3 rotações independentes, nos quais as distâncias interatómicas se mantêm
constantes. O número de modos de oscilação de uma tal molécula é então
efectivamente 3N −6 modos próprios (i.e. há seis movimentos com frequência
nula). Todavia, se a molécula for linear o número total de modos de oscilação
(longitudinais e transversais) é de apenas 3N − 5, pois essa molécula tem
simetria axial e apenas 2 movimentos de rotação em torno seu centro de
massa. A rotação axial, em torno do eixo da molécula, não é distinguı́vel,
pelo que não constitui uma rotação fı́sica.
Se os N átomos da molécula estiverem todos num mesmo plano, há 2N
graus de liberdade, incluindo 2 translações no plano e uma rotação. Esta
molécula terá então 2N − 3 modos em que a oscilação é no plano e (3N −
6)−(2N −3) = N −3 modos que vibram fora do plano. Mas, se a molécula for
linear há N graus de liberdade sobre o eixo, incluindo uma translação. Esta
molécula tem pois N − 1 modos longitudinais e (3N − 5) − (N − 1) = 2N − 4
modos transversais. Contudo, os modos transversais são todos degenerados
e há apenas N − 2 frequências transversais diferentes (por simetria, cada
modo transversal tem outro exactamente igual no plano perpendicular, com
a mesma frequência).
A molécula de CO2 é um bom exemplo de uma molécula linear:- tem 4
modos de oscilação, sendo 2 longitudinais e 2 transversais (ver fig. 1.27),
com frequências angulares ω1 = 4.4278 × 1014 Hz; ω2 = 2.616 × 1014 Hz e
ω3 = ω4 = 1.2573 × 1014 Hz.29 .
A molécula da água é outro exemplo; tem 3 modos próprios de oscilação,
todos no plano da molécula, a que correspondem as 3 frequências caracterı́sticas distintas(fig. 1.28),
ω1 = 3.001 × 1014 Hz ;
ω2 = 6.714 × 1014 Hz ;
ω3 = 7.080 × 1014 Hz
O cálculo destes modos faz-se do mesmo modo que atrás fizemos. Desta vez
porém é mais complicado escrever as equações de movimento e resolvê-las
analiticamente.
Ao interagir com o espectro de radiação da banda do infravermelho, a
molécula da água deixa bem visı́vel a sua assinatura no espectro de ab29
(vide Landau; Mechanics, 1960, e A. Finn; Fı́sica, vol. 1, 2.ed.; 1967).
44
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
a)
O
C
O
b)
O
C
O
c)
O
C
O
d)
O
C
O
Figura 1.27: Modos de vibração das moléculas de CO2 . O modo d) está
representado em perspectiva; a molécula oscila perpendicularmente ao modo
c), com igual frequência.
O
H
O
H
a)
H
O
H
b)
H
H
c)
Figura 1.28: Modos de vibração das moléculas de H2 O. As frequências são
a) ω2 = 6.714 × 1014 , b) ω1 = 3.001 × 1014 , e ω3 = 7.080 × 1014 .
1.8. OSCILADORES ACOPLADOS E FORÇADOS
45
sorção, na forma de picos de absorção, naquelas frequências próprias, ω1 , ω2
e ω3 (também chamadas frequências ressonantes). Esta é de resto a base das
técnicas de análise instrumental. Por exemplo a molécula de naftaleno, C10 H8
tem 48 frequências ressonantes. Uma base de dados contendo a informação
de todas estas frequências permite depois identificar traços da presença dessa
substância numa amostra de composição desconhecida Trata-se afinal de localizar os picos de ressonância caracterı́sticos.
1.8
Osciladores acoplados e forçados
Referiu-se anteriormente a interacção da radiação electromagnética com a
molécula da água e o aparecimento de espectros de absorção caracterı́sticos.
Trata-se de facto da observação das oscilações forçadas de um sistema com
várias frequências próprias, i.e. da ressonância num sistema de osciladores
~
acoplados sujeitos a uma acção externa periódica (no caso a força é F~ = eE,
~ =E
~ 0 cos(ωt) é o campo eléctrico da onda electromagnética).
onde E
Consideremos o sistema da fig. 1.22 (ainda, novamente). Suponhamos
por hipótese que uma das bolas, p.ex. a bola a, é solicitada externamente
com uma força periódica, F~e = F0 cos ωt î. As equações de Newton são agora
(
−Kxa − Kc (xa − xb ) + F0 cos ωt = mẍa
−Kxb + Kc (xa − xb ) = mẍb
(1.60)
Fazendo a transformação de variáveis, para as coordenadas normais do sistema, u1 = xa + xb e u2 = xa − xb (ver eqs. ??), as equações anteriores ficam,
como vimos, desacopladas, i.e.,
(
ou seja,
−Ku1 + F0 cos ωt = mü1
−Ku2 − 2Kc u2 + F0 cos ωt = mü2
(
ü1 + ω12 u1 =
ü2 + ω22 u2 =
F0
m
F0
m
cos ωt
cos ωt
(1.61)
(1.62)
Chegamos assim a uma conclusão muito interessante, que é a seguinte: as
equações dos modos próprios estão desacopladas, mas ambos os modos são
igualmente sujeitos à acção da força exterior, apesar de a força só estar a
ser aplicada num dos osciladores (na bola a).
46
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
As equações 1.62 são equações de oscilador forçado - qualquer delas. Logo,
no regime estacionário (após a fase transitória inicial) o sistema há-de oscilar
como um todo, com a frequência da acção externa, ω. Isto é, escrevemos a
priori que
(
donde
(
u1 = A1 cos ωt
u2 = A2 cos ωt
(1.63)
−ω 2 A1 cos ωt + ω12 A1 cos ωt =
−ω 2 A2 cos ωt + ω22 A2 cos ωt =
F0
m
F0
m
cos ωt
cos ωt
(1.64)
Resulta destas equações condições para A1 e A2 ,
A1 =
F0 /m
;
ω12 − ω 2
e A2 =
F0 /m
ω22 − ω 2
(1.65)
Por conseguinte, xa e xb oscilam ambos com a frequência da força externa,
ω,
(
xa = A cos ωt =
xb = B cos ωt =
A1 +A2
2
A1 −A2
2
cos ωt
cos ωt
(1.66)
com amplitudes dadas por,
A=
B=
ω12 +ω22
F0
2
2m (ω1 −ω 2 )(ω22 −ω 2 )
(1.67)
ω22 −ω12
F0
2m (ω12 −ω 2 )(ω22 −ω 2 )
A moral desta história é que há um fenómeno de ressonância sempre que a
frequência de excitação se aproximar de qualquer das frequências próprias do
sistema. Por isso essas frequências também são designadas como frequências
ressonantes. Isto é, podemos excitar os modos normais do sistema do mesmo
modo como se excita um oscilador simples − o processo de ressonância é
o mesmo. Neste caso, como não considerámos o atrito, as amplitudes de
ressonância divergem quando ω = ω1 ou ω = ω2 . Em tais condições, sem
atrito ou com atrito reduzido, o sistema pode entar de facto em ruptura, e
ser destruı́do devido à acção externa.
1.9. SISTEMA DE N OSCILADORES ACOPLADOS − TRANSIÇÃO PARA O CONTÍNUO47
1.9
Sistema de N osciladores acoplados −
transição para o contı́nuo
Seja o sistema representado na fig.1.26. Por hipótese, o sistema é constituı́do
por N massas, com N ≫ 1, igualmente espaçadas, sendo as molas todas
iguais, com constante elástica K. Consideramos por hipótese desprezáveis as
massas das molas e o atrito. Este sistema é portanto uma generalização do
sistema da fig. 1.22.
As leis de Newton dão um sistema de N equações diferenciais acopladas,
mξ¨p = −K(ξp − ξp−1 ) − K(ξp − ξp+1 ) ,
com p = 1, 2, . . . , N
(1.68)
Em princı́pio o problema resolve-se da mesma maneira que antes: é necessário
resolver a equação de valores próprios de uma matriz N × N , da qual se
obterão N valores próprios de frequência. Porém, o nosso interesse está agora
focado em analisar o sistema contı́nuo que corresponde a fazer-se N → ∞,
mantendo constante a massa total do sistema (i.e. distribuindo a massa
mais e mais até ao limite do contı́nuo). Nesse limite, o sistema pode ser
visto como uma única mola de comprimento L, cuja massa está distribuı́da
uniformemente por todo o comprimento e uma constante elástica equivalente
a N + 1 pequenas molas em série.
Se N → ∞, então ℓ ; δx ≪ 1; m ; δm; e ξp (t) ; ξ(x, t), com x = pℓ.
A eq. 1.68 transforma-se em
δm ¨
ξ(x, t) = − (ξ(x) − ξ(x − δx)) − (ξ(x) − ξ(x + δx))
K
(1.69)
Podemos desenvolver ξ(x, t) em série de Taylor,
ξ(x ± δx, t) = ξ(x, t) ±
donde
∂ 2ξ
=
∂t2
1 ∂ 2ξ 2
∂ξ
δx +
δx ± · · ·
∂x
2 ∂x2
K δx2
dm
!
∂2ξ
∂x2
(1.70)
Esta equação é, como veremos adiante, a equação de D’Alembert de uma
onda a uma dimensão,
∂t2 ξ = v 2 ∂x2 ξ
(1.71)
48
CAPÍTULO 1. OSCILAÇÕES /PARTE 1
onde v é a velocidade de propagação. Ou seja, quando se passa para o
contı́nuo, a equação dinâmica que descreve as oscilações do sistema expressase como uma onda que se propaga através desse meio − uma onda é afinal
uma perturbação a propagar-se. Este resultado é de facto muito interessante, diz-nos que: as oscilações (ou perturbações) de um sistema contı́nuo
constituem e propagam-se como uma onda.
O factor (K δx2 /dm) é a velocidade de propagação das ondas nesse meio.
Porém, δx ≪ 1, pelo que a equação parece não estar ainda numa forma
satisfatória. Contudo, se repararmos, a constante elástica da mola, vista
agora como um todo, aquela que nós medimos e que associamos à mola, não
é K, mas sim a que corresponde à associação das N + 1 pequenas molas em
série da figura, i.e.
N
+1
X
1
1
N +1
L
=
=
=
Ke
K
Kℓ
p=1 K
onde Ke é a constante elástica da mola (vista como um todo contı́nuo) e L é
o seu comprimento. Substituindo Ke na equação acima fica (com ℓ ∼ δx)
∂2ξ
Ke L ∂ 2 ξ
=
∂t2
µ ∂x2
(1.72)
onde µ = dm/dx é a massa por unidade de comprimento e L é o comprimento
total dessa mola.
Como se verá mais à frente (§??) a eq. 1.72 descreve a propagação de
uma perturbação do sistema que é a mola, com velocidade
v=
s
Ke L
µ
(1.73)
Ora, um sistema a uma dimensão, com N osciladores acoplados, tem
como sabemos N modos próprios de oscilação (ver fig. 1.29). Mas quando
N → ∞, e esse sistema tende para o contı́nuo, as oscilações do sistema dão
origem a ondas.
O que é feito então desses modos próprios, com frequência e configuração
bem definidas? De facto, as ondas que se formam não são quaisquer, são
ondas estacionárias30 . O que a seu tempo verificaremos é que os estados
próprios correspondem justamente às ondas estacionárias do sistema contı́nuo
30
Formam-se ondas estacionárias porque o sistema tem uma extensão limitada no espaço,
com fronteiras bem definidas.
1.9. SISTEMA DE N OSCILADORES ACOPLADOS − TRANSIÇÃO PARA O CONTÍNUO49
0
1
1
0
0
1
0
1
0
1
0
1
1
0
0
1
0
1
0
1
0
1
1
0
0
1
0
1
0
1
0
1
1
0
0
1
0
1
0
1
1
0
0
1
0
1
0
1
1
0
0
1
0
1
0
1
1
0
0
1
0
1
0
1
1
0
0
1
0
1
0
1
1
0
0
1
0
1
0
1
1
0
0
1
0
1
0
1
1
0
0
1
0
1
0
1
1
0
0
1
0
1
0
1
1
0
0
1
0
1
0
1
1
0
0
1
0
1
0
1
1
0
0
1
0
1
0
1
1
0
11
00
0
1
00
0 11
1
00
11
0
1
00
11
1
0
0
1
0
1
0
1
1
0
0
1
0
1
0
1
1
0
0
1
0
1
0
1
1
0
0
1
0
1
0
1
1
0
0
1
0
1
0
1
1
0
0
1
0
1
0
1
1
0
00
0 11
1
00
11
0
1
00
0 11
1
00
11
1
0
0
1
0
1
0
1
Figura 1.29: Modos de oscilação de um sistema de N osciladores acoplados.
No limite em que N → ∞ as configurações dos modos próprios correspondem
às ondas estacionárias que se podem formar nesse sistema.
(ver §??). Esses estados estão representados na fig. 1.29. Tal como antes,
em qualquer modo próprio de oscilação todas as partes do sistema oscilam
em fase, com a mesma frequência. Os estados próprios, i.e. as ondas estacionárias, são pois movimentos colectivos do sistema. Apesar de o sistema ser
contı́nuo os seus estados próprios são enumeráveis e têm frequências e configurações discretas e caracterı́sticas. Mas o número desses estados próprios é
neste caso infinito, obviamente. Também neste caso, porém, o sistema pode
ser descrito como uma combinação dos seus estados próprios.
Estas conclusões têm aplicação em qualquer sistema, e não somente numa
mola com massas. Com efeito, os conceitos que aqui estão subjacentes
são também extensivamente usados por exemplo na Mecânica Quântica. A
interacção com um sistema quântico é descrita pela interação com a sobreposição dos seus estados próprios; a evolução dos sistemas é a evolução
dessa combinação de estados próprios. A Mecânica Quântica é pois, simplisticamente, uma análise de estados próprios e respectivas frequências.