")
Cap 15 (8a edição)
Movimento Harmônico Simples
Quando o movimento de um corpo descreve uma trajetória, e a partir de certo instante começa
a repetir esta trajetória, dizemos que esse movimento é periódico. O tempo que o corpo gasta
para voltar a percorrer os mesmos pontos da trajetória é chamado de período (T).
No nosso cotidiano existem inúmeros exemplos de movimento periódico, tais como o pêndulo
de um relógio ou um sistema massa-mola.
O movimento harmônico simples - MHS
O movimento harmônico simples - MHS é movimento periódico, e, portanto o objeto passa
novamente por uma dada posição depois de um período T. O período é o inverso da frequência
f de oscilação:
1
f
A frequência é medida em Hz 1hertz 1oscilação / segundo
T
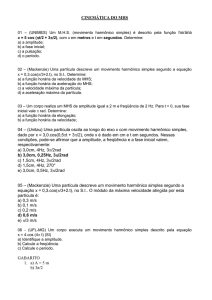
Um exemplo típico de aparato que se movimenta segundo um MHS é sistema massa-mola.
Uma mola tem uma de suas extremidades presa em uma parede rígida e a outra extremidade
está presa em um corpo que está sobre uma superfície sem atrito. Quando deslocado de sua
posição de equilíbrio o corpo começa a oscilar.
Um objeto que se desloca em MHS tem a sua posição descrita pela equação
À medida que o tempo evolui, o corpo ocupa as diversas posições mostradas na figura a
seguir.
Como o movimento é periódico, teremos que as posições se repetem depois de um tempo
igual ao período T, ou seja,
x(t ) x t T
e portanto
x t T xm cos x T xm cos t T
2
logo: T 2
T
2 f
MHS - A velocidade
dx
xm sen t
dt
Definindo a amplitude da velocidade vm xm , encontramos que:
v(t )
v(t ) vm sen t
MHS - A aceleração
dv
vm cos t
dt
2 2
Definindo a amplitude da aceleração am vm xm , encontramos que
a (t )
a(t ) am cos t
ou ainda:
a(t ) 2 x(t )
MHS - A Lei da força
Considerando um sistema massa-mola que obedeça à Lei de Hooke e supondo que a
resultante das forças que atuam na massa é a força restauradora da mola, encontramos que:
F ma m 2 x
mas : F kx
log o :
k
m
k m 2
T 2 m
k
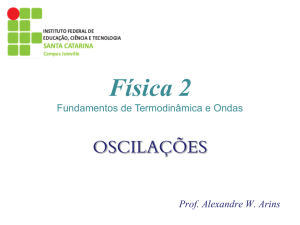
MHS - Considerações sobre energia
A energia potencial elástica de um sistema massa - mola é definida como:
1
1
U (t ) kx 2 kxm2 cos 2 t
2
2
e a energia cinética desse sistema é definida como:
Ec
1 2 1 2
mv kxm s en 2 t
2
2
A energia mecânica EM, definida como a soma das energias cinética Ec e potencial U, terá a
forma:
1 2
1
kxm cos 2 t kxm2 s en 2 t
2
2
1
1
EM kxm2 cos 2 t s en 2 t kxm2 cte.
2
2
EM U Ec
Podemos representar as energias no gráfico abaixo:
Um oscilador harmônico simples angular - O pêndulo de torção
Vamos considerar um disco preso a um fio que passa pelo seu centro e perpendicular à sua
superfície, como mostra a figura
Se giramos o disco a partir de sua posição de equilíbrio (θ = 0) e depois soltarmos, ele irá
oscilar em torno daquela posição em Movimento Harmônico Simples - MHS entre os ângulos
θm e – θm.
Rodando o disco de um ângulo θ em qualquer direção, faremos surgir um torque restaurador
dado por onde é a constante de torção:
Como a força restauradora é a única que atua no plano do disco, ela provocará o torque
resultante:
onde I é o momento de inércia do disco e
que:
I
é a sua aceleração angular. Desse modo, temos
d 2
dt 2
log o :
I
d 2
0
dt 2 I
A equação anterior define a frequência angular de oscilação do pêndulo de torção
k
I
T 2
I
k
Pêndulos
Os pêndulos fazem parte de uma classe de osciladores harmônicos simples nos quais a força
restauradora está associada à gravidade, ao invés das propriedades elásticas de um fio torcido
ou de uma mola comprimida.
O pêndulo simples
O pêndulo simples é composto de um corpo suspenso através de um fio de massa desprezível,
e ele é posto a oscilar em torno de sua posição de equilíbrio. No seu movimento a corpo
descreve um arco de circunferência.
A componente do peso, tangencial ao deslocamento, é a força de restauração desse
movimento, porque age no corpo de modo a trazê-lo de volta à sua posição central de
equilíbrio. A componente do peso, perpendicular ao deslocamento é equilibrada pela tração
exercida pelo fio, de modo que a resultante das forças tem a forma
F Mg sen
Para pequenos ângulos, pode-se usar sen e escrever F Mg . Sendo s L o
arco que descreve a trajetória do pêndulo, temos que:
mg
s
L
mg
que é uma equação do tipo F kx com k
L
F
Um corpo sob ação de uma força do tipo
com período
2
F kx , executa um movimento harmônico simples
m
.
k
Então, um pêndulo simples executa um movimento harmônico simples com período dado por
m
L
mg
2
T 2
L
g
O pêndulo físico
A maior parte dos pêndulos do mundo real não é nem ao menos aproximadamente Simples
Vamos considerar um objeto de forma arbitrária, que pode oscilar em torno de um eixo que
passa pelo ponto O, perpendicular à folha de papel. O eixo está a uma distância h do centro de
massa, onde atua a força peso.
Quando o pêndulo da figura é deslocado de sua posição de equilíbrio de um ângulo θ, surge
um torque restaurador. O torque restaurador será
= - gdsen ,
que é devido à
componente tangencial da força da gravidade. Como o torque t é proporcional a senq e não a
θ, não é válida aqui, em geral, a condição de movimento harmônico simples angular. Se os
deslocamentos angulares forem pequenos pode-se usar senq @q , e assim, para pequenas
oscilações, temos que:
dMg
que pode ser escrito como:
k , onde a constante k dMg .
Comparando o movimento de rotação com o de translação, podemos afirmar que no
movimento de rotação, um corpo sob ação de um torque restaurador k , executa um
movimento harmônico simples angular de período.
T 2
I
k
Então, para pequenas amplitudes o pêndulo físico executa um movimento harmônico simples
angular com período dado por:
T 2
Tabela com alguns momentos de inércia.
I
hMg
MHS e o movimento circular e uniforme
Vamos considerar um corpo que descreve um movimento circular e uniforme, com velocidade
constante v em um círculo de raio R.
Podem-se obter as relações do MHS a partir do movimento circular uniforme. Então, seja o
movimento circular da partícula P’ executado em um círculo de raio xm. Em um instante t a
partícula percorreu um ângulo
t . Então
cos t
x(t )
xm
x(t ) xm cos t
A relação anterior é a equação horária do MHS.
Na figura abaixo temos o comportamento da velocidade tangencial da partícula. A sua
componente horizontal será dada por:
vx
v
vx v(t ) vsen t
sen t
A aceleração é obtida como:
a(t ) 2 xm cos t
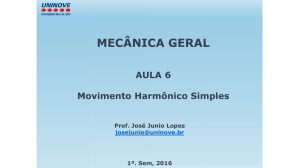
MHS amortecido
Em diversas situações do nosso cotidiano, os movimentos oscilatórios têm uma duração finita,
eles têm um começo e um fim. Isso acontece, basicamente, devido forças dissipativas tais
como as forças de atrito. Em uma situação simples as forças dissipativas podem ser
representadas por uma função que depende linearmente da velocidade.
Fd bv
Onde b é uma constante de amortecimento.
Vamos considerar um sistema composto de uma mola de constante elástica k com uma das
extremidades presa ao teto e a outra suspendendo um corpo de massa m. Nesse corpo está
presa uma haste vertical que tem a sua outra extremidade presa a um anteparo que está
mergulhado em um líquido. Quando o anteparo se move no líquido esse movimento é
amortecido por uma força que surge devido à viscosidade do líquido.
A resultante das forças que atuam no corpo de massa m é dada por:
Fres kx bv ma kx bv
A forma diferencial da equação anterior é:
d 2x
dx
m 2 b kx 0
dt
dt
A solução da equação diferencial anterior tem a forma
x(t ) xme
bt
2m
cos 't
Onde
k
b2
m 4m 2
'
É a frequência angular do oscilador amortecido.
O gráfico da posição em função do tempo para o MHS amortecido é dado por:
")