PROVAS DE APTIDÃO PEDAGÓGICA
E
CAPACIDADE CIENTÍFICA
- Trabalho de Síntese -
SISTEMA AXONOMÉTRICO DE REPRESENTAÇÃO
História, Teoria e Prática
uz
O'
ux
uy
Faculdade de Arquitectura da Universidade Técnica de Lisboa
Luís Miguel Cotrim Mateus, Assistente Estagiário
2004
Geometria Descritiva
PROVAS DE APTIDÃO PEDAGÓGICA
E
CAPACIDADE CIENTÍFICA
- Trabalho de Síntese -
SISTEMA AXONOMÉTRICO DE REPRESENTAÇÃO
História, Teoria e Prática
Este trabalho de síntese foi preparado e produzido entre Abril de 2001 e Setembro de 2004
paralelamente à actividade docente exercida como Assistente Estagiário no grupo de disciplinas de
Geometria da Área Científica Desenho e Comunicação afecta à Secção de Desenho/ Geometria/
CAD, Departamento de Arquitectura.
É realizado em cumprimento da alínea b) do nº 2 do artigo 58º do Estatuto da Carreira
Docente Universitária.
Faculdade de Arquitectura da Universidade Técnica de Lisboa
Luís Miguel Cotrim Mateus, Assistente Estagiário
2004
Geometria Descritiva
ÍNDICE GERAL
Pág.
Introdução
Parte 1
1
SISTEMA AXONOMÉTRICO DE REPRESENTAÇÃO – História
4
1.
Etimologia
5
2.
Os primórdios
6
2.1.
A tradição Ocidental
6
2.2.
A tradição Oriental
8
O Ocidente – a partir do séc. XV
11
3.1.
A Arquitectura Civil
11
3.2.
A Arquitectura Militar
13
3.3.
A Matemática (Geometria)
15
3.4.
O desenho de máquinas
16
3.
4.
O século XIX
19
5.
O século XX
21
6.
O presente
24
Parte 2
1.
SISTEMA AXONOMÉTRICO DE REPRESENTAÇÃO – Teoria
26
Conceitos e Definições
27
1.1.
Sobre algumas figuras geométricas
27
1.2.
Tipos de projecção
28
1.3.
projecção cilíndrica de algumas figuras geométricas em quadro plano
29
1.4.
Projecção cilíndrica e afinidade
29
1.5.
Sistemas de Representação
32
2.
Referencial tri-ortogonal e Sistema Axonométrico de Representação
34
3.
Da projecção cilíndrica de um referencial tri-ortogonal
39
3.1.
Três eixos coordenados oblíquos ao quadro
39
3.2.
Um eixo coordenado paralelo ao quadro
43
3.3.
4.
Dois eixos coordenados paralelos ao quadro
45
Coeficientes e escalas
48
4.1.
Coeficientes iguais, superiores e inferiores a 1
48
4.2.
Coeficientes como função da inclinação dos eixos e da direcção de projecção
51
4.2.1
53
A axonometria ortogonal como caso particular
4.3.
Isometria e anisometria
57
4.4.
Monometria, dimetria e trimetria
57
4.4.1.
64
A axonometria ortogonal como caso particular
5.
Axonometrias afins
66
6.
Determinação de referenciais
67
6.1.
Dados os vértices do triângulo fundamental
73
6.2.
Dados dois vértices do triângulo fundamental, X e Y, e as inclinações dos
eixos coordenados correspondentes
74
6.3.
Dados dois vértices do triângulo fundamental, X e Y, e as inclinações dos
eixos coordenados y e z
76
6.4.
Dados dois vértices do triângulo fundamental e as grandezas das projecções
de três segmentos unitários, ux, uy e uz, e a direcção de projecção ortogonal
ao quadro
78
6.5.
Dois vértices do triângulo fundamental e os eixos axonométricos
79
Dados dois vértices do triângulo fundamental, X e Y, os eixos
6.5.1. axonométricos, a projecção de um segmento unitário ux e a unidade
U
Dados dois vértices do triângulo fundamental, X e Y, os eixos
81
6.5.2. coordenados, a projecção de um segmento unitário uz e a unidade U
82
6.6.
Dados um vértice do triângulo fundamental, os eixos axonométricos e a
direcção de projecção
85
6.7.
Dados um vértice do triângulo fundamental, a direcção do eixo coordenado
correspondente e os eixos axonométricos
88
6.8.
Dados um vértice do triângulo fundamental, a direcção de um eixo
coordenado não correspondente ao vértice dado e os eixos axonométricos
91
6.9.
Dados um vértice do triãngulo fundamental, os eixos axonométricos, as
projecções de dois segmentos unitários e a unidade U
93
Dados um vértice do triângulo fundamental, os eixos axonométricos, e as
6.10. projecções de três segmentos unitários, ux, uy e uz (teorema de PohlkeSchwarz)
7.
8.
94
Representação axonométrica das figuras geométricas elementares, ponto, recta
e plano, através dos rebatimentos dos planos coordenados
98
7.1.
O Ponto
99
7.2.
A recta
101
7.3.
O Plano
102
Restituição das grandezas inerentes ao ponto, recta e plano, dadas as suas
105
representações
8.1.
O Ponto
105
8.2.
A Recta
106
9.3.
O Plano
107
9.
Autonomia do sistema de representação
112
10.
Quadro geral de classificação das Axonometrias
113
Parte 3
1.
2.
SISTEMA AXONOMÉTRICO DE REPRESENTAÇÃO – Prática
115
Generalidades
116
1.1.
116
Sobre os modos de desenhar
Aplicação da Afinidade
119
2.1.
Afinidade plana entre duas figuras - exemplos
119
2.2.
Aplicação da afinidade plana ao desenho da elipse definida por dois diâmetros
conjugados
123
2.3.
Aplicação da afinidade plana à condução de rectas tangentes à elipse definida
por dois diâmetros conjugados
125
2.4.
Aplicação da afinidade espacial à determinação da orientação de uma
circunferência dada a sua projecção cilíndrica e dada a direcção de projecção
127
3.
O problema das escalas e dos coeficientes – Axonometrias Métricas e
Axonometrias Convencionais
129
4.
Representação axonométrica – considerações gerais
132
5.
Representação em Axonometria Métrica
133
5.1.
Três eixos coordenados oblíquos ao quadro
133
5.2.
Um eixo coordenado paralelo ao quadro
135
5.3.
Dois eixos coordenados paralelos ao quadro
137
6.
Representação em Axonometria Convencional
138
6.1.
Três eixos coordenados oblíquos ao quadro
139
6.2.
Um eixo coordenado paralelo ao quadro
140
6.3.
Dois eixos coordenados paralelos ao quadro
142
7.
Axonometria Métrica ou Axonometria Convencional ?
143
8.
Métodos para a representação axonométrica de objectos
144
Conclusão
150
Anexos
• Anexo da Parte 2
Cálculos relativos ao 4.2.1.
• Anexo da Parte 3
Exemplos de aplicação prátca da representação axonométrica
Bibliografia
Webgrafia
Fonte das figuras
1
Introdução
2
Esta investigação é, de alguma forma, um corolário da minha actividade docente como
Assistente Estagiário na Faculdade de Arquitectura, onde me formei como Arquitecto e onde venho
prestando serviço na disiciplina de Geometria Descritiva.
O que me propus fazer neste trabalho foi o estudo do sistema axonométrico de
representação. A escolha do tema deverá ser justificada, em parte, pelo interesse afectivo que me
move em relação ao assunto.
Por outro lado, as exposições que foi possível encontrar, sobre o tema, são, em geral,
parcelares.
Por exemplo, se se tratam de questões históricas, os aspectos técnicos não são referidos.
Se se tratam de questões práticas de representação, não há, em geral, enquadramento
histórico. É, por exemplo, o que se passa na maior parte dos livros de Geometria Descritiva
consultados
Outras vezes, nota-se um desiquilíbrio entre a teoria e a prática. Estas aparecem juntas,
sendo a prática sustentada por uma teoria excessiva para a prática que, supostamente, a justifica.
Esta situação é fruto de uma herança histórica do sec. XIX.
Resumindo, a afectividade, alguns descontentamentos, e a certeza da re-descoberta ao
aprofundar este tema, constituiram as motivações para a realização desta investigação.
Este trabalho está estruturado segundo três vectores que se traduzem em três partes.
Na primeira parte procurou fazer-se uma síntese dos aspectos históricos relacionados com a
representação axonométrica. Deve ser entendida como uma introdução alargada. Corresponde
essencialmente a uma recolha de informação com o objectivo de enquadramento.
Pretendeu recolher-se um conjunto de elementos que permitam um entendimento mínimo
sobre os contributos que os vários domínios da expressão técnica e artística do Homem ao longo dos
tempos deram à axonometria. Está a falar-se da pintura, da arquitectura, da indústria, etc.
Esta parte é de grande importância, pois dela se percebem muitos aspectos da teoria e da
prática. Na verdade, uma história deste tipo é sempre um percurso pelas práticas e pela construção
teórica ao longo dos tempos.
Na segunda parte são abordadas as questões teóricas, que apenas muito pontualmente se
justificam por razões práticas. Em geral, a motivação não é a da prática.
De alguma forma, pretende ser uma “re-construção” teórica actual, e pessoal, da axonometria,
obviamente iluminada pelo que se sabe da história.
Algumas das conclusões e propostas são introduzidas, tanto quanto se sabe, com novidade,
se assim me é permitido dizer!
3
Trata-se da distinção feita entre monometria e isometria, da generalização da questão dos
coeficientes de redução, da enumeração das condições que permitem definir um referencial, do
conceito de axonometrias afins, da generalização da representação em axonometrias métricas
oblíquas, e da inclusão de um quadro geral de classificação de axonometrias que inclui alguns subsistemas que não são usualmente utilizados apesar de se verificar que são bastante práticos (mais
uma vez a herança histórica!).
Na terceira parte é feita uma “descida” da teoria à prática. Isto é, a partir do que foi exposto na
segunda parte, procurou seleccionar-se o mínimo de elementos que pudessem sustentar uma prática
consistente. Também nesta parte há questões que se pensa terem sido introduzidas com novidade. É
o caso da representação em sub-sistemas axonométricos em que um eixo coordenado é paralelo ao
quadro, e da generalização de um conjunto de métodos de representação a um único método que se
designou por método das vistas ortogonais.
Trata-se de uma reflexão sobre a prática da representação e as circunstâncias em que essa
prática pode se feita. Em cada circunstância colocam-se em evidência determinados aspectos da
teoria que podem variar consoante a natureza da circunstância.
Esta opção justifica-se numa altura em que há muitos modos de representar e em que o
tradicional suporte da folha de papel já não é único. Não se exclui que algumas das questões teóricas
expostas, que não são notadas nesta parte, possam vir a ser colocadas em relevo por uma qualquer
circunstância ou contexto de prática futura. Destas razões se percebe que a teoria deva constituir num
documento desta natureza, uma parte autónoma, distinta da prática. Não quer isto dizer que a prática
esteja dissociada da teoria. Com efeito, a prática é sempre teoria aplicada.
A segunda e terceira partes não correspondem a uma simples recolha de informação. São
também reflexão e proposta.
Espero que este documento possa servir de referência a todos os que se interessarem pelo
tema da representação axonométrica. Devo esclarecer que o objectivo não foi fazer um manual
prático de axonometria. Se assim tivesse sido muitas das partes integrantes deste documento seriam
dispensáveis e, porventura, outros elementos teriam de ser incluídos.
4
Parte 1
SISTEMA AXONOMÉTRICO DE REPRESENTAÇÃO - História
5
1.
Etimologia
O termo Axonometria apareceu pela primeira vez em 1852 na obra Lehrbuch der
axonometrischen Projetkionslehre com os autores L. e H. Meyer.
Etimologicamente, este vocábulo deriva de dois termos gregos, αξων (axôn), que significa
eixo, e, το μετρν (metron), que significa medida1.
O primeiro sentido grego da palavra axôn significa o eixo de uma roda, o eixo do freio de um
cavalo, o eixo de um sólido de revolução2.
Daqui se pode depreender que a construção de qualquer axonometria começará com a
escolha do referencial e sua representação.
Contudo, a palavra axôn utilizada no plural (axones) designa, também, as leis dadas por
3
Sólon aos Atenienses, porque eram gravadas em prismas giratórios. O facto de serem gravadas em
prismas giratórios permitia que fossem lidas de todos os lados.
1
2
3
Jean Aubert, Axonométrie, p. 82
Op. Cit. (1), p. 82
Sólon (640-558 a.C.) foi legislador ateniense e poeta. Foi o fundador da democracia.
6
2.
Os primórdios
Fazer uma abordagem histórica ao tema Axonometria não deverá, nem poderá, corresponder
a limitar inferiormente o intervalo de tempo do estudo à data 1852.
É necessário seguir um rol de acontecimentos históricos que conduziram ao facto particular
ocorrido em 1852. Efectivamente, esse facto nem sequer é dos mais significativos na história da
axonometria.
Fazer um percurso diacrónico corresponderá, em primeiro lugar, a olhar para a história das
representações gráficas.
Neste olhar procuram descobrir-se nas representações as características que hoje se
identificam como sendo da representação axonométrica. Entre estas encontram-se a preservação do
paralelismo e a preservação das proporções das medidas numa dada direcção.
Por uma questão de simplicação do discurso chamar-se-á, doravante, representação
axonométrica ou axonometria (identificando o sub-sistema nos termos actuais se assim se entender)4
a qualquer representação que evidencie estas características.
Há tradições históricas em que estas características são intencionais e outras em que são,
mais ou menos, acidentais.
Em todo o caso, este tipo de representação existiu um pouco por todo o lado.
2.1.
A tradição Ocidental
Em geral, na tradição pictórica ocidental está presente um preconceito óptico da visão. Isto
manifesta-se desde a Grécia antiga, lugar em que a Óptica foi inventada, e culminou no séc. XV com
o estabelecimento das regras geométricas da Perspectiva por Leon Battista Alberti5.
O registo mais antigo que se conhece deste tipo de representação data do séc. IV a.C. e é
uma representação de um frontão num fragmento de cerâmica (fig. 1).
4
5
Poderão ser utilizadas as designações axonometria cavaleira (ou representação axonométrica cavaleira) e
axonometria militar (ou representação axonométrica militar)
Leon Battista Alberti (1404-1472) - Escultor, pintor, arquitecto, humanista e músico italiano.
7
Fig. 1
Pode encontrar-se este tipo de representação nos frescos de Pompeia retratando, por
exemplo, cenas de um bordel (fig. 2), ou decorando o interior de casas (fig. 3 - excerto de uma pintura
mural na Casa dos Vetti).
Fig. 2
Fig. 3
Note-se que neste último exemplo é procurada a perspectiva. Essa procura traduz-se na
conjugação de várias representações axonométricas. Na linha média vertical da pintura torna-se
evidente o desencontro das axonometrias.
Na pintura medieval também é possível encontrar representações axonométricas. Veja-se, por
exemplo o caso de Giotto6 (fig. 4 – Fresco na Igreja de Santa Croce, Florença, Itália). No seu caso, a
axonometria aparece como excepção, misturada com a perspectiva, isto é, com a convergência das
linhas, num contexto pré-renascentista.
Há ainda o exemplo de Ambrogio Lorenzetti7, cuja pintura faz lembrar as tendências de
alguma pintura do sec. XX (fig. 5 - tábua intitulada Cidade à Beira-Mar).
6
7
Giotto di Bondone (1266-1337) - Pintor e Arquitecto italiano, nascido em Vespignano, Florença.
Pietro Ambrogio Lorenzetti (1280-1384) - Pintor italiano.
8
Fig. 4
2.1.
Fig. 5
A tradição Oriental
Na tradição oriental, sino-japonesa, bastante desenvolvida em álgebra, não se verifica o
preconceito óptico da tradição ocidental.
A gramática pictórica oriental permaneceu praticamente inalterada ao longo dos séculos,
correspondendo essencialmente à representação axonométrica.
Esta permanência dura, pelo menos, até ao séc. XIX.
Há, inclusivamente, um tratado de arquitectura chinês, da autoria de Le Ying Tsao Fa Shih,
datado de 1097. Neste, aparecem desenhos de encaixes de peças de madeira num tipo de
representação que actualmente se designa por axonometria cavaleira. Na figura 6 é dado outro
exemplo de uma representação do séc. XI.
Fig. 6
Mas é na pintura que existem mais testemunhos da representação axonométrica.
9
Veja-se, por exemplo, o quadro “Han XiZai dá um banquete” de Gu HongZhong8 (fig. 7) ainda
do primeiro milénio.
Fig. 7
Neste quadro, a perspectiva não procura a convergência. É pela conjugação de várias
axonometrias que se dá a ideia das orientações dos vários elementos constituintes da cena.
Aqui não há nenhuma tentativa forçada de articular as várias axonometrias que geraria
incongruências, que é precisamente o que acontece no quadro da figura 3.
Noutro exemplo do séc. XIV, de autoria atribuida ao pintor Wang Cheng-Ming, pode, mais
uma vez, verificar-se a estruturação do espaço do quadro através da representação axonométrica
cavaleira (fig. 8 - cópia datada do séc. XVII).
Fig. 8
A mesma tendência é observável no Japão, por influência da China.
8
Gu HongZhong (910-980 d.C.) - Pintor chinês
10
Veja-se o exemplo do quadro “Gaki Zoshi” do período Heian, sec. XII (fig. 9) ou de um quadro
do período Kamakura, sec. XIV (fig. 10).
Fig. 9
Fig. 10
Para verificar que a tendência se manteve, termina-se com dois quadros. O primeiro é da
autoria do pintor chinês Jiao BingZhen, do séc. XVIII (fig. 11). O segundo é da autoria do pintor
japonês Utagawa Yoshikazu, do séc. XIX (fig. 12).
Fig. 11
Fig. 12
Depois de todos estes exemplos, custa imaginar, embora se possa compreender, que não
tenha chegado aos nossos dias nenhuma literatura própria sobre as técnicas geométricas ou
algébricas de representação dos chineses ou dos japoneses9.
9
cf. Jan Krikke, “Axonometry: A matter of perspective”, p. 1 (vidé bibliografia)
11
3.
O Ocidente – a partir do séc. XV
A partir do séc. XV muitos foram os caminhos que conduziram à axonometria.
Estes vários caminhos estão relacionados com a Arquitectura Civíl, a Arquitectrura Militar, a
Matemática (Geometria) e o desenho de máquinas.
3.1.
A Arquitectura Civil
Os contributos que a arquitectura civil deu para o aparecimento da axonometria prendem-se,
obviamente, com as questões ligadas à representação.
No séc. XV, os textos de referência sobre a arquitectura são de Vitruvio, Alberti, e de Rafael10.
Segundo Vitruvio, o desenho arquitectónico comporta a planta, o alçado e a vista perspéctica.
Segundo Alberti, apenas as plantas e os alçados são úteis ao arquitecto, devendo ser
acompanhadas por uma maquete. A perspectiva
“não pode senão introduzir a falsidade das
11
aparências na figuração arquitectural” .
Segundo Rafael, há um compromisso entre as duas situações precedentes. Este admite a
perspectiva como modo de convencer o cliente, e introduz um novo elemento: o corte.
A maquete, por ser um meio pouco económico, suscitou a necessidade de encontrar meios
gráficos eficazes para responder ao problema da representação sintética do edifício.
As primeiras respostas a esta questão resultaram sobre a forma de um tipo de desenho que
se pode designar por proto-axonométrico12 . Na verdade, não se tratam de axonometrias, mas sim de
desenhos de perspectiva em que o ponto de fuga se afasta cada vez mais do centro da folha de
desenho, o observador “sobe” em relação ao objecto e afasta-se deste. O resultado são “quase”
axonometrias cavaleiras.
Este tipo de desenhos pode ser encontrado por exemplo em Leonardo da Vinci13 (fig. 13).
Há ainda os desenhos de Baldassare Peruzzi14. Veja-se o exemplo do desenho para um
projecto de São Pedro em Roma, de 1530 (fig. 14).
10
Yves Alain-Bois, “Avatars de l’axonométrie”, p. 131 (vidé bibliografia)
Rafael como autor do terceiro texto é uma conjectura.
11
12
13
Op. Cit. (10), p. 131
Op. Cit. (10), p. 132
Leonardo da Vinci (1452-1519) - Pintor, escultor, arquitecto e cientista italiano nascido em Vinci.
12
Fig. 13
Fig. 14
Mas é nos tratados de arquitectura que é mais visível este tipo de representação, sobretudo
para ilustrar pormenores.
No Codex Coner15 podem observar-se detalhes em corte perspectivado, em que o ângulo de
visão é inferior (fig. 15).
Também em Architecture16, de Philibert de l’Orme17 se podem encontrar detalhes em “quase”
axonometria cavaleira (fig. 16).
Fig. 15
14
15
16
17
Baldassare Peruzzi (1481-1536) - Arquitecto italiano.
Tratado de arquitectura datado de 1515.
Tratado de Arquitectura datado de 1567.
Philibert de l’Orme (1500/15-1570) - Arquitecto francês.
Fig. 16
13
Na obra Les plus excellents bâtiments de France18, Cerceau19 representa os edifícios vistos
lateralmente e de cima “como um homem a cavalo, um cavaleiro, que por virtude da sua elevada
altura pode observar atentamente tudo o que o rodeia”20 (fig. 17 - vista de conjunto do castelo de
Maulnes). Contudo, a representação não é muito constante e, por vezes, os desenhos aparecem um
pouco “toscos” como se pode ver no exemplo da figura 17. No entanto, há outros exemplos em que o
autor foi mais bem sucedido (fig. 18).
Fig. 17
Fig. 18
Na arquitectura civil houve sempre grande resistência à adopção da representação
axonométrica.
Por um lado, o carácter analítico do desenho arquitectónico teve eco no desenvolvmento de
métodos de articulação das representações em planta, corte e alçado, desde Durer21 até Monge22, e
mesmo, de Monge até ao princípio do do séc. XX.
Por outro lado, este tipo de representação foi sempre alvo de muitas críticas uma vez que, ao
contrário das plantas, cortes e alçados, não preserva a verdade geométrica dos edifícios dada pelas
plantas, corte e alçados23.
3.2.
A Arquitectura Militar
A partir de meados do séc. XVI, a Arquitectura Militar deixou de constituir um sub-capítulo dos
tratados de arquitectura para passar a ter uma literatura própria.
18
19
20
Recolha e levantamento gráfico de edifícios franceses notáveis, datada de 1576-1579.
Jacques Androuet Du Cerceau (1510-1585) - Arquitecto teórico e gravador francês.
Massimo Scolari, “Elements for a History of Axonometry”, nota 14 (vidé bibliografia)
Esta terá sido a origem da designação Axonometria Cavaleira.
21
22
23
Albrecht Durer (1471-1528) - Desenhador, pintor, gravador e geómetra alemão. Inventou um método de articulação
de três vistas cuja designação se pode traduzir por “o transferidor”.
Gaspard Monge (1746-1818) - Engenheiro, Físico, Matemático e Geómetra francês. Fundou a Geometria Descritiva.
cf. Op. Cit. (10), p. 133
14
Nos tratados de Arquitectura Militar adoptou-se um sistema gráfico (que hoje se conhece
como axonometria militar dadas as suas origens) que permite eliminar da representação os ângulos
mortos e a redução gráfica com a profundidade dados pela perspectiva. Para além disso, permite
efectuar cálculos directamente sobre os desenhos.
Apareceram vários tratados sobre esta matéria colocando em contraste a perspectiva central
e a projecção paralela24.
Podem destacar-se, por exemplo, Della Fortificazione delle Citá (Veneza 1564) de Girolamo
Maggi e Jacomo Castriotto (fig. 19), On Military archithecture (Brescia 1599) de F. de Marchi (fig. 20),
Des Fortifications et artifices de architecture et perspective (Paris 1601) de J. Perret de Chamberry
(fig. 21), entre outros.
Fig. 19
Fig. 20
Fig. 21
Os desenhos pretendiam-se sintéticos e precisos pois “uma imperfeição numa linha pode
significar a perda de um exército”25.
No tratado de Maggi e Castriotto é clara a recusa da perspectiva central. Dizem: “Ninguém
deve esperar ver nestes trabalhos os métodos e as regras da perspectiva; primeiro, porque não faz
parte da profissão de soldado produzi-las, e segundo, porque a diminuição das distâncias envolvida
removeria muitos dos planos, os quais são a base destes trabalhos (..) será chamada perspectiva
soldatesca.”26
Outros tratados aparecem, destacando-se L’art de fortifier, de défendre et d’attaquer les
places (1677) de Millet Deschales, e Perspectiva militaris (1756) de Christian Rieger.
24
25
26
cf. Op. Cit. (20), p. 74
Op. Cit. (20), p. 74
Op. Cit. (20), p. 74
15
Este último, contém a primeira explicação geométrica da axonometria27.
Com a proliferação das guerras religiosas do séc. XVII, a escrita das obras sobre arquitectura
militar fica na mão dos Jesuítas.
O conhecimento que os jesuítas têm da axonometria terá sido trazido para a Europa pelos
missionários que regressavam do Oriente, em particular da China28. Estes não estariam muito
interessados nas qualidades estéticas da axonometria, mas sim no seu valor prático.
3.3.
A Matemática (Geometria)
Outra origem possível para o desenvolvimento da axonometria prende-se com a Matemárica e
com a Geometria.
Luca Pacioli29 no seu tratado Divina Proportione (Veneza 1509) apresenta alguns desenhos
que podem ser reconhecidos como axonometrias cavaleiras (fig. 22).
Durer segue-lhe o exemplo em Underweysung Der Messung (1525). Também neste tratado
se podem encontrar desenhos que remetem para a representação cavaleira (fig. 23 - extraída da
tradução francesa).
Fig. 22
Fig. 23
Fig. 24
Fig. 25
A tendência manteve-se e pode encontrar-se a representação axonométrica por exemplo no
tratado de T. Luders de 1680, neste caso em axonometria militar (fig. 24).
27
28
29
Op. Cit. (10), p. 133
Op. Cit. (9), p. 1
Luca Pacioli (1445-1520) - Matemático italiano.
16
Mesmo Gaspard Monge, na sua Geométrie Descriptive (1798), ilustra os princípios do seu
método de representação através de dois desenhos em axonometria cavaleira (fig. 25).
Por outro lado, em 1551 Oronce Finé30 relacionou a questão das sombras com os problemas
da medição. Observou que se a luz solar incidir a 45º com a superfície da terra, então o comprimento
das sombras é igual à altura dos objectos.
Alguns anos mais tarde, Gemma Frizon31 explicou como se podia obter a altura de qualquer
objecto através das suas sombras.
O passo das sombras à axonometria corresponde a “iluminar a sombra e descobrir que se
trata de uma representação”32.
Ainda por outro lado, em contextos que não são da axonometria, podem encontrar-se
representações que para todos os efeitos o são. Veja-se, por exemplo, o desenho de Jean Cousin33
de representação da perspectiva de um cubo com uma diagonal espacial vertical (fig. 26).
Fig. 26
Com efeito, o desenho geometral do cubo, isto é, a projecção horizontal, não é mais do que
que a perspectiva isométrica do cubo que vai ser “inventada” dois séculos e meio mais tarde.
3.4.
O desenho de máquinas
Não se querendo ser abusivo, pode fazer-se remontar o desenho de máquinas a Leonardo da
Vinci.
30
31
32
33
Oronce Finé (1494-1555) - Matemático e cartógrafo francês.
Gemma Frizon (Frisius ou Frisio) (1508-1555) – Matemático, médico e cartógrafo holandês.
Op. Cit. (20), p. 76
Jean Cousin (1495-1560) - Pintor francês.
17
Ao contrário dos seus desenhos de arquitectura, os desenhos das máquinas que idealizava
são produzidos em axonometria cavaleira (fig. 27 e 28).
É claro que não se trata de desenho de máquinas no sentido industrial.
Fig. 27
Fig. 28
Posteriormente, podem ver-se desenhos que correspondem a axonometrias, por exemplo, em
tratados de relojoaria (fig. 29).
Fig. 29
Nesta prancha de um tratado de relojoaria de 1741 pode observar-se, no centro da parte
superior da figura, uma representação axonométrica que ilustra a articulação dos vários componentes
do mecanismo. Provavelmente esse desenho serviria para auxiliar na montagem do engenho.
18
Foi precisamente com este espírito que William Farish34 publicou em 1822 um trabalho
intitulado “On isometrical Perspective”35.
O princípio do seu método de representação consistia em considerar um cubo em que as
arestas representariam as três direcções principais do espaço. Por meio de uma projecção ortogonal
do cubo segundo a direcção de uma diagonal espacial obtém-se na folha de desenho a representação
das três direcções do espaço com a mesma escala gráfica. Este mecanismo espacial acaba por
admitir a representação das três direcções principais do espaço com uma escala única qualquer.
Farish não dá explicações geométricas do seu método afirmando que para os geómetras
seriam supérfluas e para a pessoa comum seriam incompreensíveis.
Esta postura ilustra bem o sentido das suas intenções.
A ideia essencial era disponibilizar aos operários um meio gráfico que lhes permitisse
compreender a montagem e desmontagem das máquinas nas fábricas. Esta intenção e o valor do
método de representação para este efeito estão patentes na segunda figura do seu texto, em que é
mostrada uma perspectiva isométrica de uma máquina (fig. 30).
Fig. 30
Depois de Farish ter publicado o seu trabalho, alguns autores prosseguiram com as suas
ideias e objectivos. Por exemplo, em 1825 é publicado Mathematics for pratical men, em 1834 é
publicado A treatise on isometrical Drawing, etc.
Mas rapidamente este objectivo prático foi ultrapassado e o rumo que a axonometria iria
seguir seria outro.
34
35
William Farish (1759-1837) - Professor de Física na Universidade de Cambridge
Em Novembro de 1819 foi inaugurada em Cambridge a “Philsophical Society”. Em 1822 é publicado o primeiro
volume das “Transactions”, o qual abre com o texto de William Farish que nessa altura presidia à “Philsophical
Society”.
19
4.
O século XIX
O método apresentado por Farish depressa chamou a atenção da comunidade matemática.
Em pouco tempo começa a ser produzida literatura matemática sobre o tema, desvirtuando o
objectivo inicial deste tipo de representação.
Weisbach36 é o responsável pela generalização do método de Farish à axonometria ortogonal
em geral. O seu trabalho está presente na obra Die monodimetriche und axonometriche
Projectionsmethode. Aqui encontra-se a Geometria Descritiva bastante ligada à Geometria Analítica37.
Outro nome de referência nos avanços dados ao estudo da axonometria é Schlomilch38. Este
nota em 1856 que a axonometria é um método perfeitamente legítimo da Geometria Descritiva. É dele
a dedução da expressão l + m + n = 2u , relativa à axonometria ortogonal, em que l , m e n
2
2
2
2
representam três segmentos que se tomam por projecção de três segmentos u iguais entre si e
perpendiculares entre si.
Em 1852 C. e H. Meyer publicam um tratado em que aparece pela primeira vez a palavra
axonometria.
Em 1853 Pohlke39 formula, sem apresentar nenhuma prova, aquele que viria a ser conhecido
como o teorema fundamental da axonometria. Diz que “um quadrângulo plano O’X’Y’Z’ pode sempre
tomar-se por projecção paralela de três segmentos OX, OY e OZ iguais, com um ponto O comum, e
dois a dois ortogonais”40.
Mais tarde, esta conjectura foi demonstrada pelo matemático Schwarz41. Posteriormente o
teorema foi generalizado a quaisquer três segmentos de qualquer comprimento e fazendo entre si
quaisquer ângulos.
De um modo geral, todos os desenvolvimentos analíticos da axonometria são de origem
anglo-saxónica.
36
37
38
39
40
41
Julius Ludwig Weisbach (1806-1871) - Matemático alemão. A axonometria oritogonal é a que resulta de uma projeção
ortogonal do referencial.
Gino Loria, Storia della Geometria Descrittiva, p. 414 (vidé bibliografia)
Oscar Schlomilch (1823-1901) - Matemático natural de França. Contudo estudou e trabalhou na Alemanha.
Karl Wilhelm Pohlke (1810-1876) - Matemático, pintor e professor de Geometria Descritiva alemão.
Op. Cit. (37), p. 429
Karl Herman Amandus Schwarz (1843-1921) - Matemático polaco.
20
Em França, registam-se com particular evidência os tratados de Geometria Descritiva de Jules
de La Gournerie42 e de Amédée Mannheim43, com particular destaque para o primeiro.
De La Gournerie, no livro IV do seu Traité de géometrie Descriptive, trata da perspectiva
axonométrica e cavaleira. A esta última, apelida-a de perspectiva rápida.
De La Gournerie conhecia os trabalhos de Farish, de Weibach e de Schlomilch.
Ao primeiro faz referência explícita, do segundo utiliza as designações “perpective
monodimétrique” e “perspective axonométrique”44
e do terceiro é utilizada a expressão
l 2 + m 2 + n 2 = 2u 2 atrás referida.
Em todo o caso, embora se verifiquem alguns prelúdios algébricos, a axonometria é sempre
tratada por meio de casos práticos e concretos (fig. 31 - nicho esférico em isometria, e fig. 32. - nicho
esférico em perspectiva cavaleira). Para evitar equívocos na leitura dos desenhos axonométricos, que
permitem o que se pode chamar por reversibilidade do espaço, é feita a recomendação da utilização
das sombras.
Fig. 31
Fig. 32
Choisy45, aluno de La Gournerie, adoptou a representação axonométrica para documentar
uma série de obras literárias. São estas L’Art de construire chez les Romains (1868), L’Art de
construire chez les Byzantins (1876), L’Art de bâtir chez les Égyptiens (1904) e L’Histoire de
l’Architecture (1899).
Vejam-se alguns desses desenhos nas figuras 33 (de L’Histoire de l’Architecture) , 34 (de
L’Histoire de l’Architecture) e 35 (de L’Art de construire chez les Romains).
42
43
44
45
Jules de La Gournerie (1814-1883) - Professor de Geometria Descritiva na École Polytechnique.
Victor Mayer Amédée Mannheim (1831-1906) - Oficial da artilharia francesa.
A diferença de designações Projectionsmethode e Perspective ilustra bem a diferença entre o carácter matemático
dos alemães e o carácter prático dos franceses. Sobre esta questão (e outras) sugere-se a leitura do artigo “O ensino
do desenho técnico” de Lino Cabezas (vidé bibliografia).
Auguste Choisy (1841-1909) - Engenheiro de pontes e calçadas. Também foi professor na École Polytechnique.
21
Fig. 33
5.
Fig. 34
Fig. 35
O século XX
Jan Krikke46 aponta como raiz da “Revolução Modernista no Ocidente (entre 1860 e 1920)” a
descoberta da arte oriental (chinesa e japonesa) por parte da comunidade artística europeia, em
particular francesa, e americana. Este movimento de re-descoberta da arte oriental ficou conhecido
por Japonismo.
Curiosamente, a reversibilidade do espaço, que poderá ser apontada como o “calcanhar de
Aquiles” da representação axonométrica, é enaltecida pelo pintor Malevitch (1878-1935): “rompe com
a terra”47.
A partir de 1919, o pintor suprematista russo El Lissitzky (1890-1941) defende a axonometria
como modo de representar um novo espaço:
“A perspectiva central que se aplicava e se desenvolveu no Renascimento representou o cubo
com um plano colocado paralelo ao observador. É uma concepção de fachada, a profundidade de um
palco, por isso a perspectiva estava tão ligada à cenografia... inseriu o mundo num cubo, e este foi
transformado de tal modo que no plano dá uma pirâmide [...]” os artistas modernos ”...não quiseram
estar mais defronte do objecto, mas nele. Decompuseram o único centro da perspectiva em
fragmentos”... “O suprematismo deslocou para o infinito o vértice da pirâmide óptica da perspectiva.”48
No desenho para o Abstract Cabinet (1927-28), Lissitsky explora a ambiguidade do desenho
axonométrico (fig. 36).
46
47
48
Jan Krikke, “China, Japan and the Birth of Modernism” (vidé bibliografia)
Malevitch, citação in Op. Cit. (10) , p. 134 (vidé bibliografia)
El Lissitzky, citação in Victor Consiglieri, A Morfologia da Arquitectura, vol I, p. 51 (vidé bibliografia),.
22
Fig. 36
Segundo Yves Alain-Bois o nascimento moderno da axonometria teve lugar em 1923 na
exposição De Stijl em Paris49.
Importada da pintura, a axonometria vem revelar-se como forma adequada de representar o
espaço da nova arquitectura moderna, de volumes paralelepipédicos.
Na exposição De Stijl, Theo van Doesburg (1883-1931) disse:
“Já então se demonstra o novo princípio de uma nova arquitectura espacial e funcional
desenhada segundo o método axonométrico. Este método de representação permite a leitura
simultânea de todas as partes da casa, vista nas suas justas proporções, isto é, sem pontos de fuga
perspécticos. Ao contrário, segundo a representação bidimensional, o desenho é imediatamente
percebido sob o perfil volumétrico, na sua dimensão cúbica. A planta desaparece e dá lugar a um
sistema de leitura em que se poderão ter claramente quer as medidas quer as estruturas necessárias.
Compreende-se que todo o projecto, dos alicerces ao tecto, deverá ser também elaborado
axonometricamente.”50
Vejam-se os desenhos de Theo van Doesburg e Cor van Eesteren (1897-1988) para uma
casa particular (1923) (fig. 37).
Fig. 37
49
50
Op. Cit. (10)
Theo van Doesburg, citação in Op. Cit. (42), vol I, pp. 50 e 51
23
Outro entusiasta da axonometria é o arquitecto Alberto Sartoris (1901-1998).
Este, enaltece a axonometria afirmando que:
“dois desenhos tomados de ângulos opostos são suficientes para ilustrar completamente um
projecto; permite facilmente entrar no desenho rigoroso, praticamente sem realizar esboços;
facilmente compreendida pelos executantes da obra, que desde o princípio podem ter uma visão de
conjunto do edifício”51.
Veja-se um desenho do projecto de Alberto Sartoris para a Villa du Dr. Roman Brum à
Lausanne (1934) (fig. 38).
Fig. 38
Fig. 39
O arquitecto americano John Hejduk (1999-2000) adoptou um tipo de representação que
acabou por ser baptizada como axonometria de Hejduk. Esta não é mais que um caso particular da
axonometria cavaleira e já era utilizada por Du Cerceau no sec. XVI.
Veja-se por exemplo o desenho do projecto para La Máscara de la Medusa (1998 – Buenos
Aires) (fig. 39).
Fora de um contexto conceptual, em 1938 Eckhart apresenta o método dos cortes para a
representação axonométrica ortogonal. Este método corresponde a considerar o rebatimento dos
planos coordenados do referencial tri-ortogonal para o plano da representação seguidos de
translacções. O objectivo das translacções é o de não sobrepor as figuras rebatidas às figuras em
projecção.
51
Alberto Sartoris, citação in Manuel Couceiro, Perspectiva e Arquitectura, tese de doutoramento, p. 121 (vidé
bibliografia)
24
6.
O presente
Actualmente, a representação axonométrica está banalizada.
Certas tradições permanecem.
Por exemplo, os textos de matemática continuam a adoptar a representação axonométrica
para ilustrar problemas (fig. 40), na física pode ser utilizada para ilustrar conceitos (fig. 41 axonometria do espaço-tempo), etc.
Fig. 40
Fig. 41
Na arquitectura também continua a ser utilizada. Por exemplo, para desenvolver uma ideia
através de um esquiço (fig. 42 - esquiço do arquitecto Siza Vieira), ilustrar um modo ou sequência de
construção (fig. 43 - desenho de um projecto do arquitecto Renzo Piano) ou para ilustrar um pormenor
construtivo (fig. 44).
Fig. 42
Fig. 43
Fig. 44
No tempo actual a novidade histórica ao nível da representação axonométrica vem através do
desenho computacional.
Com efeito, a axonometria constitui o principal interface visual entre os operadores
informáticos e os softwares de desenho, em particular os softwares de modelação tridimensional.
Estes softwares são utilizados em muitos domínios, desde a Física, Matemática, Arquitectura,
Engenharia, Design, Medicina, etc, e são um poderoso instrumento de investigação.
25
Pelo facto de permitirem fazer cálculos em pouco tempo, admitem a possibilidade de tratar
problemas de grande complexidade que de outra forma seriam humanamente impossíveis de resolver.
Vejam-se as seguintes figuras (fig. 45 - display em axonometria, aplicação ao design; fig. 46 display em axonometria, aplicação à medicina).
Fig. 45
Fig. 46
Também ligado à tecnologia informática têm-se os jogos de computador. Alguns destes
apresentam o espaço em representação axonométrica. Este tipo de representação permite o
movimento das personagens do jogo mantendo as direcções gráficas do cenário ao arrastá-lo. Isto
porque o ponto de vista está situado no infinito.
Vejam-se os exemplos das figuras 47 (imagem do jogo SimCity 4) e 48 (imagem do jogo
Zeus).
Fig. 47
Fig. 48
Longe de ser uma curiosidade arqueológica, a axonometria e suas aplicações não deixarão
morrer a sua história no presente.
Seguramente este é um domínio com perspectivas de desenvolvimento para o futuro.
26
Parte 2
SISTEMA AXONOMÉTRICO DE REPRESENTAÇÃO - Teoria
27
1.
Conceitos e Definições
Parte-se do princípio que alguns conceitos e definições são conhecidos e se assumem
quando se inicia um trabalho desta natureza.
Aqueles que aqui são expostos são os fundamentais para que se explicitem as bases e os
termos de um discurso.
No entanto far-se-á referência ao que é suposto estar adquirido e que servirá de base para o
que se segue.
O Espaço que se considera é o Espaço Euclidiano clássico, a três dimensões, estendido até
ao infinito. É um Espaço Projectivo1. Em todo o caso, nesse espaço considera-se a métrica euclidiana.
Assume-se que, pelo menos, são conhecidas as condições de pertença entre pontos, rectas e
planos.
Devem ser conhecidas as posições relativas entre rectas e planos.
Devem ser conhecidos os conceitos de perpendicularidade, ortogonalidade, obliquidade, viés
e paralelismo.
Também se supõem conhecidas figuras como o triângulo, quadrilátero, circunferência, elipse,
parábola, hipérbole, pirâmide, prisma, cone, cilíndro, esfera, bem como as propriedades das
tranformações: rotação (e rebatimento), translacção, simetria e homotetia.
Quando alguma questão for menos evidente, far-se-ão as referências que se entenderem
necessárias nos momentos julgados oportunos. Os termos dessas referências são os expostos e as
abordagens podem ser sintéticas, algébricas ou mistas.
1.1.
Sobre algumas figuras geométricas
O PONTO é uma entidade sem dimensão, isto é, adimensional.
A LINHA é uma entidade unidimensional gerada pelo movimento contínuo do ponto.
As linhas podem ser CURVAS ou não curvas; às linhas não curvas dá-se o nome de
RECTAS.
Cada linha recta tem uma DIRECÇÃO; direcção é a propriedade comum a uma família de
rectas paralelas entre si.
Cada linha recta contém um PONTO IMPRÓPRIO, isto é, um ponto situado no infinito.
1
A postulação de que uma recta contém um ponto situado no infinito, que um plano contém uma recta no infinito e que
o espaço contém um plano no infinito, é o que distingue a geometria euclidiana da geometria projectiva. Para uma
introdução à Geometria Projectiva sugere-se a leitura do livro Fundamental Concepts of Geometry de Bruce
Meserve (vidé bibiografia). Neste livro, o autor faz uma “descida” da geometria mais geral, a Topologia, até chegar à
geometria Euclidiana. Neste processo, as diversas geometrias vão sendo consideradas como casos particulares
umas das outras.
28
A cada direcção de rectas corresponde apenas um ponto impróprio, isto é, todas as rectas
paralelas entre si têm o mesmo ponto do infinito, daí dizer-se que rectas paralelas são rectas
concorrentes no infinito.
A SUPERFÍCIE é uma entidade bidimensional gerada pelo movimento contínuo da linha.
A GERATRIZ é a linha, deformável ou indeformável, que se move no espaço para gerar a
superfície.
A DIRECTRIZ é a linha ou superfície, em que se apoia a geratriz no seu movimento.
Quando uma geratriz recta se move continuamente no espaço, conservando a direcção,
apoiada numa directriz recta, com uma direcção diferente da sua, é gerado o PLANO.
Cada plano tem uma ORIENTAÇÃO2; orientação é a propriedade comum a uma família de
planos paralelos entre si.
Cada plano tem uma RECTA IMPRÓPRIA, isto é, uma recta situada no infinito.
A cada orientação de planos corresponde apenas uma recta imprópria, isto é, todos os planos
paralelos entre si têm a mesma recta do infinito, daí dizer-se que planos paralelos se intersectam no
infinito.
Uma orientação contém uma infinidade de direcções.
O lugar geométrico de todos os pontos impróprios e de todas as rectas impróprias é o PLANO
IMPRÓPRIO, isto é, o plano do infinito.
Uma figura geométrica3 é um qualquer sistema de pontos, rectas ou planos.
A um sistema plano de rectas concorrentes dá-se o nome de FEIXE DE RECTAS, e ao ponto
comum a todas as rectas dá-se o nome de CENTRO do feixe de rectas.
A um sistema espacial de rectas concorrentes dá-se o nome de ESTELA DE RECTAS.
A um sistema de planos com uma recta em comum dá-se o nome de FEIXE DE PLANOS, e à
recta comum aos planos dá-se o nome de EIXO do feixe de planos.
A um sistema de planos com um ponto em comum dá-se o nome de ESTELA DE PLANOS.
Ao ponto comum a todos os planos de uma estela dá-se o nome de CENTRO da estela.
1.2.
Tipos de projecção
A PROJECÇÃO de um ponto
A , numa superfície [α ], é um ponto A' que resulta da
[α ], de uma RECTA PROJECTANTE passante por A . A projecção de
a , numa superfície [α ], é uma linha a ' que resulta da intersecção, com a superfície [α ],
intersecção, com a superfície
uma recta
2
3
O conceito de Orientação é o equivalente para planos ao conceito de Direcção para rectas.
Luís Porfírio da Motta Pegado, Curso de Geometria Descritiva da Escola Polytechnica, p. 3 (vidé bibliografia).
29
de um PLANO PROJECTANTE passante por a . À superfície de projecção, em geral plana, dá-se o
nome de QUADRO (no discurso que se segue supõe-se o quadro plano).
O ponto comum a todas as rectas e planos projectantes pode ser próprio ou impróprio e
designa-se por CENTRO DE PROJECÇÃO.
Se o centro de projecção for próprio, o TIPO DE PROJECÇÃO diz-se CENTRAL ou CÓNICA.
Se o centro de projecção for impróprio, o tipo de projecção diz-se PARALELA ou
CILÍNDRICA.
A projecção paralela pode subdividir-se em OBLÍQUA e ORTOGONAL consoante as
projectantes sejam oblíquas ao quadro ou perpendiculares ao quadro.
1.3.
Projecção cilíndrica de algumas figuras geométricas em quadro plano
Qualquer figura contida no quadro tem projecção coincidente consigo própria.
A projecção de um ponto é um ponto próprio ou impróprio consoante a projectante intersecte
ou seja paralela ao quadro.
A projecção de uma recta pode ser um ponto (se esta tiver a direcção das projectantes) ou
uma recta.
A projecção de um plano pode ser uma recta (se a orientação do plano contiver a direcção
das projectantes) ou coincidir com o plano de projecção.
A projecção de um feixe de rectas pode ser um conjunto de pontos (se o centro do feixe for
impróprio e coincidir com o centro de projecção), uma recta (se a orientação do plano do feixe contiver
a direcção das projectantes) ou um feixe de rectas.
A projecção de uma estela de rectas pode ser um conjunto de pontos (se o centro da estela
for impróprio e coincidir com o centro de projecção) ou um feixe de rectas.
1.4.
Projecção cilíndrica e afinidade
A AFINIDADE é uma transformação geométrica que deriva directamente da projecção
cilíndrica. É um caso particular da HOMOLOGIA4, quando o centro da tranformação é impróprio.
4
Para introdução ao estudo da homologia e da afinidade aconselha-se a leitura do anexo ao livro Geometria
Descritiva - Método de Monge de Guilherme Ricca (vidé bibliografia).
Para aprofundamento do estudo da afinidade aconselha-se a leitura do Capítulo II das Lições de Geometria
Descritiva de Augusto Queiróz (vidé bibliografia).
Também se pode encontrar uma aplicação da homologia ao estudo das linhas cónicas no capítulo I do livro
Geometría Descriptiva y sus aplicaciones, Tomo I, de Angel Taibo Fernadez (vidé bibliografia).
30
Uma AFINIDADE ESPACIAL é a tranformação geométrica que permite fazer corresponder as
figuras de dois planos
α
e
β . O meio de fazer a correspondência consiste em tomar as figuras como
projecções cilíndricas umas das outras segundo uma direcção, d , não contida nas orientações dos
planos
α
e
β.
A direcção de projecção designa-se por DIRECÇÃO DE AFINIDADE. A recta
comum aos planos
α
e
β,
i,
designa-se EIXO DA AFINIDADE. Duas figuras que se correspondem
dizem-se AFINS. Os pontos do eixo da afinidade auto-correspondem-se e dizem-se PONTOS
DUPLOS. O eixo da afinidade é uma RECTA DUPLA. Duas rectas afins têm sempre um ponto duplo.
Uma afinidade espacial fica definida dados os planos
α
e
β
Se se projectar a afinidade espacial, entre os planos
o plano
δ
possa coincidir com um dos planos,
α
ou
e a direcção d .
α
e
β , num plano δ
(sem excluir que
β ), obtém-se uma AFINIDADE PLANA. A recta
i ' , projecção da recta i comum aos planos α e β , é o eixo da afinidade plana. A direcção d ' ,
projecção da direcção d da afinidade espacial, consiste na direcção da afinidade plana. A projecção
de duas figuras afins, entre os planos
α
e β , consiste em duas figuras afins no plano
δ
. Os pontos
do eixo da afinidade são duplos. O eixo da afinidade é uma recta dupla. Numa afinidade plana, as
rectas com a direcção d ' são duplas. Uma afinidade plana fica definida dados o eixo i ' e dois pontos
afins, A e A1 .
Um caso particular da afinidade plana é a que se pode obter da afinidade espacial pelo
rebatimento de um dos planos sobre o outro.
O objectivo deste trabalho não é desenvolver as propriedades desta transformação
geométrica, pelo que apenas se citam algumas propriedades e resultados que serão utilizadas
adiante:
1) Invariância5 do paralelismo – duas rectas paralelas têm como rectas afins duas rectas
igualmente paralelas.
2) Invariância das razões entre comprimentos – duas medidas A e B , tais que
como afins duas medidas, A1 e B1 , tais que
5
A
= K , têm
B
A1
=K.
B1
Em 1872, o matemático alemão Felix Klein expôs a ideia de que uma geometria consiste no estudo das propriedades
das figuras que permanecem INVARIANTES sob a acção de um determinado grupo de transformações no respectivo
espaço.
Sugere-se a consulta do livro A History of Mathematics de Victor J. Katz, pp. 790 e 791 (vidé bibliografia).
31
3) Não preservação da perpendicularidade – em geral, uma afinidade não preserva a
perpendicularidade.
4) Invariância da incidência – se um ponto P pertence a uma recta a , então o ponto P1 , afim
de
P , pertence à recta a1 , afim de a . Se o ponto P for impróprio, o ponto P1 também é impróprio.
5) Se for dado um triângulo
[A, B, C ] ,
[A' , B' , C ']
como sendo projecção cilíndrica de um triângulo
do qual apenas se conhecem as proporções, é possível construir uma infinidade de
[
]
[
]
afinidades planas entre o triângulo A' , B ' , C ' e qualquer triângulo A1 ' , B1 ' , C1 ' com as proporções
[
]
do triângulo A, B, C (fig. 1).
A'=A 1''
C1''
D'=D1''
B'=B1''
C'
E'=E 1''
dC
1
dA
dD
dB
dE
A1'
m
C1'
D1'
2
n
B1'
E 1'
e
3
3
Fig. 1
[
]
Seja dado o triângulo A' , B ' , C ' .
Com lado
A' B' comum construa-se um triângulo [ A1 ' ' , B1 ' ' , C1 ' '] com as proporções
conhecidas. Este triângulo é afim do triângulo dado. O eixo da afinidade é a recta A'.B ' e a direcção
da afinidade é dada pela recta C '.C1 ' ' .
Pelo ponto C1 ' ' conduza-se uma perpendicular à recta A'.B ' , determinando nesta o ponto
D ' ≡ D1 ' ' . Com centro no ponto D' , descreva-se um arco de circunferência de raio D' C1 '' . Este
arco intersecta a recta A'.B' no ponto E ' ≡ E1 ' ' .
32
Pelos pontos C ' ,
D' e E ' conduzam-se três rectas quaisquer paralelas entre si, com
direcção d , respectivamente, d C , d D e d E
Na recta d D , fixe-se arbitrariamente um ponto D1 ' . Pelo ponto D1 ' conduza-se uma recta
perpendicular à recta d C , determinando nesta o ponto m . Com centro no ponto D1 ' e raio D 1 ' m
descreva-se um arco de circunferência que intersecta a recta d D no ponto n (apenas se considera
um dos pontos de intersecção).
Pelo ponto n conduza-se uma recta perpendicular a d E , determinando nesta recta o ponto
E1 ' .
Com centro no ponto D1 ' e raio
D1 ' E1 ' , descreva-se um arco de circunferência que
intersecta a recta d C no ponto C1 ' (apenas se considera um dos pontos de intersecção).
Conduzam-se pelos pontos A' e B ' as rectas d A e d B que intersectam a recta D1 '.E1 ' nos
pontos A1 ' e B1 ' , respectivamente.
[
]
[
]
O triângulo A1 ' , B1 ' , C1 ' tem as proporções dadas e é afim do triângulo A' , B ' , C ' .
Prolongando os segmentos
determinam-se os pontos
[C ' B']
e
[C1 ' B1 '],
determina-se o ponto 1 ; analogamente,
2 e 3 (este ponto não está representado na figura). Os pontos 1 e 2
definem o eixo da afinidade, e .
Este resultado pode ser generalizado a qualquer figura.
6) A afinidade de uma cónica é uma cónica do mesmo tipo – uma elipse (ou circunferência) só
pode ser afim de uma elipse ou circunferência, uma parábola só pode ser afim de uma parábola, e
uma hipérbole só pode ser afim de uma hipérbole.
1.5.
Sistemas de representação
Um SISTEMA DE REPRESENTAÇÃO é um articulado de superfícies de projecção e tipos de
projecção com uma determinada lógica operativa.
Existem vários sistemas de representação:
SISTEMA DA DUPLA PROJECÇÃO ORTOGONAL
SISTEMA DA MÚLTIPLA PROJECÇÃO ORTOGONAL
SISTEMA DAS PROJECÇÕES COTADAS
33
SISTEMA CÓNICO (PERSPECTIVA LINEAR)
SISTEMA AXONOMÉTRICO
(outros)
34
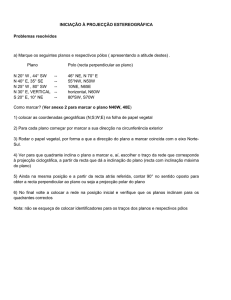
2.
Referencial tri-ortogonal e Sistema Axonométrico de Representação
Um REFERENCIAL TRI-ORTOGONAL é composto por três rectas perpendiculares entre si e
concorrentes num ponto.
Cada uma das rectas designa-se por EIXO COORDENADO. Identificam-se os eixos
coordenados por x , y e
z (fig. 2).
RO
AD
QU
z'
z
uz
O'
U
uy
y'
ux
y
O
x'
U
U
x
Fig. 2
Cada eixo coordenado tem dois sentidos. Um dos sentidos considera-se POSITIVO e o outro
NEGATIVO.
O ponto de intersecção dos três eixos coordenados é a ORIGEM DO REFERENCIAL e
identifica-se por O .
Cada par de eixos coordenados define um PLANO COORDENADO. Identificam-se por: plano
coordenado
α
(plano definido pelos eixos coordenados x e
definido pelos eixos coordenados x e
coordenados y e
y ), plano coordenado β (plano
z ) e plano coordenado δ (plano definido pelos eixos
z ).
Os três planos coordenados dividem o espaço em octantes. Cada octante corresponde a um
triedro tri-rectângulo.
35
O SISTEMA AXONOMÉTRICO DE REPRESENTAÇÃO tem como base operativa a projecção
cilíndrica do referencial tri-ortogonal sobre um plano de projecção. Identifica-se o plano de projecção
por QUADRO, embora também se possa designar por PLANO AXONOMÉTRICO.
As
projecções
dos
eixos
coordenados
no
quadro
designam-se
por
AXONOMÉTRICOS. Identificam-se por: eixo axonométrico x ' , eixo axonométrico
axonométrico
EIXOS
y ' , e eixo
z ' , respectivamente projecções dos eixos coordenados x , y e z . Cada eixo
axonométrico tem dois sentidos, um positivo e outro negativo, respectivamente projecções dos
sentidos positivo e negativo de cada eixo coordenado.
Os ângulos que fazem, entre si, os semi-eixos axonométricos positivos designam-se por
ÂNGULOS AXONOMÉTRICOS. Cada ângulo axonométrico é projecção de um ângulo recto.
Identificam-se por: ângulo axonométrico
α̂ ,
ângulo axonométrico
β̂
e ângulo axonométrico
δˆ ,
respectivamente projecções dos ângulos rectos contidos nos planos coordenados homónimos.
Uma AXONOMETRIA é o conjunto das projecções do referencial tri-ortogonal e dos objectos
orientados relativamente a este.
Se a direcção de projecção for ortogonal ao quadro tem-se uma AXONOMETRIA
ORTOGONAL.
Se a direcção de projecção for oblíqua ao quadro tem-se uma AXONOMETRIA CLINOGONAL
ou OBLÍQUA.
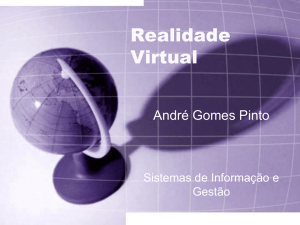
Cada eixo coordenado intersecta o quadro num ponto próprio ou impróprio. Identificam-se
esses pontos por X , Y e Z , repectivamente traços dos eixos coordenados x , y e
z
Z
QU
AD
RO
t
t
O
Y
t
X
y
x
Fig. 3
z (fig. 3).
36
Cada plano coordenado intersecta o quadro segundo uma recta própria ou imprópria.
Identificam-se essas rectas por t α , t β e t δ , respectivamente traços dos planos coordenados
e
δ
α, β
.
Note-se que: os pontos X e Y pertencem a t α , os pontos X e Z pertencem a t β e os
pontos
Y e Z pertencem a t δ .
[
]
O triângulo X , Y , Z designa-se por TRIÂNGULO FUNDAMENTAL DA AXONOMETRIA.
Considerando fixo o referencial e fazendo deslocar o quadro, mantendo a sua orientação,
outros triângulos fundamentais se obtêm. Todos os triângulos fundamentais assim obtidos são
homotéticos. O centro da homotetia é a origem do referencial.
Se um dos eixos coordenados for paralelo ao quadro, os traços dos planos coordenados que
o contêm ser-lhe-ão paralelos e simultaneamente perpendiculares ao traço do plano coordenado que
não contém o eixo paralelo ao quadro. Por exemplo, se o eixo coordenado
os traços t β e t δ são paralelos ao eixo coordenado
plano coordenado
α
z for paralelo ao quadro,
z e perpendiculares ao traço t α . Neste caso, o
é perpendicular ao quadro.
Se dois eixos coordenados forem paralelos ao quadro, o traço no quadro, do plano
coordenado que os contém, será impróprio. Neste caso, os outros dois planos coordenados serão
perpendiculares ao quadro e os seus traços, no quadro, serão perpendiculares entre si. Por exemplo,
se os eixos coordenados
z e x forem paralelos ao quadro, os planos coordenados α e δ serão
perpendiculares ao quadro e os seus traços, no quadro, t α e t δ , serão perpendiculares entre si; a
recta
t β será imprópria. Neste caso o eixo coordenado y é perpendicular ao quadro.
Verifica-se ainda que qualquer triângulo fundamental (na condição dos três vértices serem
próprios) é acutângulo.
Considerem-se, por exemplo, os pontos X e Y como traços dos eixos coordenados x e y ,
respectivamente (fig. 4).
37
Z
tX
tY
c
Z'
Y
a
Z''
b
e
d
X
t
[c ]
Fig. 4
Sabe-se que os eixos coordenados são perpendiculares entre si, pelo que a origem do
[α ] de diâmetro XY . A superfície esférica [α ]
intersecta o quadro segundo a circunferência [cα ] . Sendo o eixo coordenado z perpendicular ao
plano coordenado α , é obrigatoriamente tangente à superfície esférica [α ] pelo que apenas poderá
intersectar o quadro fora do círculo delimitado por [cα ] .
referencial estará contida na superfície esférica
Notando que o eixo coordenado z é ortogonal ao traço t α , o seu traço no quadro tem de
estar situado entre as rectas t y e t x , tangentes à circunferência
[cα ]
nos pontos Y e X ,
respectivamente.
Conclui-se assim que o ponto Z apenas poderá estar situado entre as rectas t y e t x e fora
[ ]
do círculo de cα .
Qualquer ponto nestas condições define com Y e X um triângulo acutângulo como se irá
demonstrar:
Sejam a , b e c os ângulos internos do triângulo
[X , Y , Z ]
nos pontos X , Y e Z ,
respectivamente.
[ ]
[ ] nos pontos Y e Z ' .
O segmento [ZX ] intersecta a circunferência [cα ] nos pontos X e Z ' ' .
O segmento ZY intersecta a circunferência cα
Note-se que os pontos Z ' e
logo, estando o ponto
Z ' ' são distintos (não coincidentes com os pontos Y nem X ),
Z ' ' entre os pontos Z ' e X , o ângulo a > e .
De modo análogo, o ângulo b > d .
38
A soma dos três ângulos internos de um triângulo é 180 º pelo que:
a + b + c = 180º ⇔ c = 180º −(a + b)
(1)
e:
a + b < 180º
(2)
Como o ponto
Z ' pertence à circunferência [cα ] e os pontos X e Y definem um diâmetro
[
]
desta, então o triângulo Y , Z ' , X é rectângulo no vértice
Z ' , logo a + d = 90º .
Analogamente e + b = 90º
Como os pontos
Z ' e Z ' ' não coincidem com os pontos X nem Y , então os ângulos a , b ,
c e d são maiores que 0º e menores que 90º .
Como o ângulo b > d e o ângulo a > e , então:
a + b > 90º .
(3)
Logo, pode concluír-se, a partir de (1) e considerando (2) e (3), que 180 − ( a + b) < 90º , isto
é, o ângulo c < 90º .
[
]
Tal como se pretendia concluir: a < 90º , b < 90º e c < 90º , isto é, o triângulo X , Y , Z é
acutângulo.
39
3.
Da projecção cilíndrica de um referencial tri-ortogonal
Neste capítulo abordam-se as condições em que um referencial tri-ortogonal pode ser
projectado num plano.
Consideram-se três casos: os três eixos coordenados são oblíquos ao quadro, um dos eixos
coordenados é paralelo ao quadro, e, por fim, dois eixos coordenados são paralelos ao quadro. Estes
três casos também podem ser interpretados como situações limite uns dos outros.
3.1
Três eixos coordenados oblíquos ao quadro
Considerem-se os pontos X , Y e Z , vértices de um triângulo fundamental.
Considerem-se os traços tα ,
t β e tδ .
Considerem-se os eixos coordenados x , y e
z oblíquos ao quadro (fig. 5).
Z
[c ]
[c ]
[c ]
Y1
MYZ
M ZX
X1
C
E'
t
Y
Z1
M XY
X
t
t
[c ]
Fig. 5
Neste caso todos os eixos coordenados intersectam o quadro.
Identifique-se a projecção da origem, O , do referencial tri-ortogonal no quadro por O ' .
40
[ ] é o traço, no quadro, de uma superfície esférica [α ] de diâmetro XY e
centro no ponto M XY (ponto médio do segmento [ XY ] ). Esta superfície esférica contém a origem O .
A circunferência [c β ] é o traço, no quadro, de uma superfície esférica [β ] de diâmetro XZ e
A circunferência cα
[ ]
centro no ponto M XZ (ponto médio do segmento XZ ). Esta superfície esférica contém a origem O .
[ ] é o traço, no quadro, de uma superfície esférica [δ ] de diâmetro ZY e
(ponto médio do segmento [ZY ] ). Esta superfície esférica contém a origem O .
A circunferência cδ
centro no ponto M ZY
As superfícies esféricas
[α ], [β ] e [δ ] intersectam-se duas a duas segundo circunferências
contidas em planos perpendiculares ao quadro.
[α ] intersecta a superfície esférica [β ] segundo uma circunferência cuja
projecção ortogonal, no quadro, é o segmento [ XX 1 ] perpendicular à recta tδ .
A superfície esférica [α ] intersecta a superfície esférica [δ ] segundo uma circunferência cuja
projecção ortogonal, no quadro, é o segmento [YY1 ] perpendicular à recta t β .
A superfície esférica
As duas circunferências, por pertencerem ambas à superfície esférica
[α ], intersectam-se em
dois pontos, O e O1 , cujas projecções ortogonais, no quadro, coincidem com o ponto C , o ortocentro
[
]
do triângulo X , Y , Z .
Estes dois pontos, O e O1 , por pertencerem simultaneamente à superfície esférica
superfície esférica
[β ] e à
[δ ] , pertencerão obrigatoriamente à circunferência de intersecção entre as duas
superfícies esféricas.
As superfícies esféricas
[β ]
e
[δ ]
intersectam-se segundo uma circunferência, cuja
[
]
projecção ortogonal, no quadro, é o segmento ZZ 1 . Como esta circunferência tem de conter os
[
]
pontos O e O1 , então o segmento ZZ 1 passa pelo ponto C .
Concluindo, dados os vértices de um triângulo fundamental, apenas existem duas posições
possíveis para a origem do referencial tri-ortogonal, O e O1 . Note-se que O e O1 são simétricos
relativamente ao quadro. Logo, um triângulo fundamental corresponde a dois referenciais (no entanto
para as explicações seguintes faz-se referência apenas a um).
41
[ ]
A circunferência cπ
pontos
é o traço, no quadro, de uma superfície esférica
[π ]
definida pelos
X , Y , Z e O . O centro desta superfície esférica é o ponto E , cuja projecção ortogonal, no
quadro, é o ponto E ' , circuncentro do triângulo fundamental.
Quanto à projecção do referencial pode enunciar-se o seguinte:
1) Se direcção das projectantes estiver contida na orientação do quadro:
• então os eixos axonométricos serão paralelos entre si e com a direcção das projectantes
(neste caso, o ponto O ' é impróprio);
• e for ortogonal ao traço tα , então os eixos axonométricos serão todos perpendiculares ao
traço tα ;
• e for ortogonal ao traço t β , então os eixos axonométricos serão todos perpendiculares ao
traço
tβ ;
• e for ortogonal ao traço tδ , então os eixos axonométricos serão todos perpendiculares ao
traço tδ .
No entanto, note-se que os pontos dos eixos axonométricos não podem verdadeiramente ser
tomados como projecção dos pontos dos eixos coordenados. Na verdade, qualquer ponto de qualquer
eixo coordenado tem projecção imprópria e coincidente com o ponto O ' . Esta é uma situação
destituída de qualquer interesse prático.
2) Se a direcção de projecção for ortogonal ao quadro, então o ponto O ' coincide com o
ortocentro C do triângulo fundamental e os eixos axonométricos coincidem com as perpendiculares
aos lados do triângulo fundamental conduzidas pelos vértices que lhes são opostos. Isto é, o eixo
axonométrico x ' passa pelo ponto X e é perpendicular ao traço tδ , o eixo axonométrico
pelo ponto
y ' passa
Y e é perpendicular ao traço t β , e o eixo axonométrico z ' passa pelo ponto Z e é
perpendicular ao traço tα .
3) Se a direcção de projecção for oblíqua ao quadro, qualquer ponto próprio do quadro,
excepto o ortocentro do triângulo fundamental, pode ser considerado como O ' . Os eixos
axonométricos x' ,
y ' e z ' serão as rectas passantes pelo ponto O' e pelos pontos X , Y e Z ,
respectivamente. Nesta situação, em que a direcção de projecção é oblíqua ao quadro, várias são as
particularizações que podem ser feitas:
• Se a direcção de projecção estiver contida na orientação de um plano coordenado, então os
eixos coordenados, com direcções contidas na orientação referida, têm projecção sobre o traço do
42
plano coordenado cuja orientação contém a direcção de projecção. Por exemplo, se a direcção da
projecção estiver contida na orientação do plano coordenado
α , então os eixos axonométricos x'
e
y ' coincidem com o traço tα .
• Se a direcção de projecção for a mesma de algum dos eixos coordenados, então o eixo
axonométrico correspondente fica reduzido ao traço do eixo coordenado que tem a direcção da
projecção. Os outros dois eixos axonométricos coincidem com os traços dos planos coordenados que
se intersectam segundo o eixo com a direcção da projecção. Por exemplo, se o eixo coordenado
tiver a direcção da projecção, então: o eixo axonométrico
coordenado
y
y ' reduz-se ao ponto Y (traço do eixo
y no quadro), o eixo coordenado x' coincide com o traço tα e o eixo coordenado z '
coincide com o traço tδ .
[ ] (excluindo os pontos
• Se o ponto O ' estiver contido na circunferência cα
os eixos axonométricos x' e
y ' serão perpendiculares entre si.
• Se o ponto O ' estiver contido na circunferência [cβ ] (excluindo os pontos
os eixos axonométricos x' e
X e Y ), então
X e Z ), então
z ' serão perpendiculares entre si.
[ ] (excluindo os pontos Y
• Se o ponto O ' , estiver contido na circunferência cδ
os eixos axonométricos
e Z ), então
y ' e z ' serão perpendiculares entre si.
• Se o ponto O ' coincidir com o ponto Z1 , então os eixos axonométricos x ' e
coincidentes com o traço tα e perpendiculares ao eixo axonométrico
y ' são
z' .
• Se o ponto O ' coincidir com o ponto Y1 , então os eixos axonométricos x ' e z ' são
coincidentes com o traço
t β e perpendiculares ao eixo axonométrico y ' .
• Se o ponto O ' coincidir com o ponto X 1 , então os eixos axonométricos
y ' e z ' são
coincidentes com o traço tδ e perpendiculares ao eixo axonométrico x ' .
4) Se a direcção de projecção for ortogonal:
• ao traço tα (exceptuando a direcção do eixo coordenado z ), então o eixo axonométrico z '
é perpendicular ao traço tα ;
• ao traço tδ (exceptuando a direcção do eixo coordenado x ), então o eixo axonométrico x'
é perpendicular ao traço tδ ;
• ao traço
t β (exceptuando a direcção do eixo coordenado x ), então o eixo axonométrico y '
é perpendicular ao traço
tβ .
43
3.2.
Um eixo coordenado paralelo ao quadro
Considerem-se os pontos X e Y (traços dos eixos coordenados x e y no quadro)
Considerem-se os traços tα ,
t β e tδ .
Considerem-se os eixos coordenados x ,
y e z (paralelo ao quadro)
Considere-se a projecção ortogonal da origem do referencial tri-ortogonal no quadro, C ,
contida no traço tα (fig. 6).
t
t
t
Y
C
X
MXY
[c ]
Fig. 6
Neste caso, apenas dois eixos coordenados intersectam o quadro em pontos próprios
Identifique-se a projecção da origem, O , do referencial tri-ortogonal no quadro por O ' .
[ ] é o traço, no quadro, de uma superfície esférica [α ] de diâmetro XY e
médio do segmento [ XY ] ). Esta superfície esférica contém a origem do
A circunferência cα
centro M XY (ponto
referencial tri-ortogonal, O .
Neste caso, o plano coordenado
α
é perpendicular ao quadro e intersecta a superfície
[α ] segundo uma circunferência, cuja projecção ortogonal no quadro coincide com o
segmento [ XY ] . Esta circunferência contém dois pontos, O e O1 , cujas projecções ortogonais no
esférica
quadro coincidem com o ponto O . Isto é, sendo dados os pontos X , Y e C , existem duas
hipóteses possíveis para a origem do referencial tri-ortogonal. Mais uma vez, O e O1 são simétricos
relativamente ao quadro (para as explicações seguintes apenas se considera um referencial).
Ainda neste caso, os traços t β e tδ são paralelos ao eixo coordenado z e perpendiculares à
recta tα .
44
Quanto à projecção do referencial pode enunciar-se o seguinte:
1) Se direcção das projectantes estiver contida na orientação do quadro:
• então os eixos axonométricos x' e
y ' serão paralelos entre si e com a direcção das
projectantes, isto é, o eixo axonométrico z ' é impróprio (neste caso o ponto O ' é impróprio);
• e for ortogonal ao traço tα , então os eixos axonométricos x ' e
y ' serão perpendiculares ao
traço tα ;
• e for ortogonal ao eixo coordenado
perpendiculares aos traços
z , então os eixos axonométricos x' e y ' serão
t β e tδ .
No entanto, note-se que os pontos dos eixos axonométricos não podem verdadeiramente ser
tomados como projecção dos pontos dos eixos coordenados. Na verdade, qualquer ponto de qualquer
eixo coordenado tem projecção imprópria e coincidente com o ponto O ' . Esta é uma situação
destituída de qualquer interesse prático.
2) Se a direcção de projecção for ortogonal ao quadro, então o ponto O ' coincide com o
ponto C (neste caso não faz sentido referir este ponto como ortocentro do triângulo fundamental), os
eixos axonométricos x ' e y ' coincidem com o traço tα e o eixo axonométrico z ' é perpendicular ao
traço tα contendo o ponto C .
3) Se a direcção de projecção for oblíqua ao quadro, qualquer ponto próprio do quadro,
excepto o ponto C , pode ser considerado como ponto O ' . Os eixos axonométricos x ' , y ' e z ' serão
as rectas passantes pelo ponto O ' e pelos pontos
X , Y e Z (impróprio), isto é, o eixo axonométrico
z ' é sempre perpendicular ao traço tα . Nesta situação, em que a direcção de projecção é oblíqua ao
quadro, várias são as particularizações que podem ser feitas:
• Se a direcção de projecção estiver contida na orientação de um plano coordenado, então os
eixos coordenados com direcções contidas na orientação referida têm projecção sobre o traço do
plano coordenado cuja orientação contém a direcção de projecção. Por exemplo, se a direcção da
projecção estiver contida na orientação do plano coordenado
α , então os eixos axonométricos x'
e
y ' coincidem com o traço tα .
• Se a direcção de projecção for a mesma de algum dos eixos coordenados, então o eixo
axonométrico correspondente fica reduzido ao traço do eixo coordenado que tem a direcção da
projecção. Os outros dois eixos axonométricos coincidem com os traços dos planos coordenados que
se intersectam segundo o eixo com a direcção da projecção. Por exemplo, se o eixo coordenado y
45
tiver a direcção da projecção, então o eixo axonométrico
y ' reduz-se ao ponto Y , o eixo
axonométrico x ' coincide com o traço tα e o eixo axonométrico z ' coincide com o traço tδ .
[ ] (excluindo os pontos
• Se o ponto O ' estiver contido na circunferência cα
os eixos axonométricos x' e
X e Y ), então
y ' serão perpendiculares entre si.
• Se o ponto O ' estiver contido no traço tα , então os eixos axonométricos x ' e
y ' serão
coincidentes e perpendiculares ao eixo axonométrico z ' .
4) O eixo axonométrico z ' é sempre perpendicular ao traço tα .
5) Se a direcção de projecção for ortogonal às rectas
t β e tδ , então os eixos axonométricos
x' e y ' são coincidentes e perpendiculares aos traços t β e tδ .
Note-se que poderia ser outro eixo paralelo ao quadro, pelo que, para as conclusões se
manterem válidas, devem sofrer as devidas permutações.
3.3.
Dois eixos coordenados paralelos ao quadro
Considere-se o ponto Y (traço do eixo coordenado y no quadro)
Considerem-se os traços tα e tδ .
Considerem-se os eixos coordenados x e y (paralelos ao quadro), e z (perpendicular ao
quadro) (fig. 7).
t
t
Y
Fig. 7
Identifique-se a projecção da origem do referencial tri-ortogonal no quadro por O ' .
São conhecidas as direcções dos eixos coordenados x e y .
46
Os traços tα e tδ são perpendiculares entre si e passam pelo ponto
Y.
Os pontos Z e X (traços dos eixos coordenados z e x no quadro) são impróprios tal
como o traço
t β (traço do plano coordenado β no quadro).
Os planos coordenados
O plano coordenado
β
α
e
δ
são perpendiculares ao quadro.
é paralelo ao quadro.
Quanto à projecção do referencial pode enunciar-se o seguinte:
1) Se direcção das projectantes estiver contida na orientação do quadro:
• então o eixo axonométrico
y ' terá a direcção das projectantes, logo os eixos axonométricos
x' e z ' serão coincidentes e impróprios (neste caso, o ponto O ' é impróprio);
• e for ortogonal ao eixo coordenado x , então o eixo axonométrico
y ' será perpendicular ao
traço tα ;
• e for ortogonal ao eixo coordenado
z , então o eixo axonométrico y ' será perpendicular ao
traço t β .
No entanto, note-se que os pontos do eixo axonométrico y ' não podem verdadeiramente ser
tomados como projecção dos pontos do eixo coordenado y . Na verdade, qualquer ponto de qualquer
eixo coordenado tem projecção imprópria e coincidente com o ponto O ' . Esta é, mais uma vez, uma
situação destituída de qualquer interesse prático.
2) Se a direcção de projecção for ortogonal ao quadro então o ponto O ' coincide com o ponto
Y , o eixo axonométrico y ' reduz-se ao ponto Y , o eixo axonométrico x' coincide com o traço tα e o
eixo axonométrico z ' coincide com o traço tδ .
3) Se a direcção de projecção for oblíqua ao quadro, qualquer ponto próprio do quadro,
excepto o ponto Y , pode ser considerado como ponto O ' . Os eixos axonométricos x' e z ' serão
sempre perpendiculares entre si, no ponto Y , e paralelos aos traços tα e tδ , respectivamente. O eixo
axonométrico
y ' será a recta passante pelos pontos O' e Y .
4) Se a direcção de projecção estiver contida na orientação de um plano coordenado, então
os eixos coordenados com direcções contidas na orientação referida têm projecção sobre o traço do
plano coordenado cuja orientação contém a direcção de projecção. Por exemplo, se a direcção da
47
projecção estiver contida na orientação do plano coordenado
β , então os eixos axonométricos x'
e
z ' coincidem com o traço t β (que neste caso é impróprio).
Note-se que poderia ser outro plano coordenado paralelo ao quadro, pelo que, para as
conclusões se manterem válidas, devem sofrer as devidas permutações.
48
4.
Coeficientes e escalas
Se forem considerados, em cada eixo coordenado, um segmento unitário U e as suas
projecções (no quadro) u z ,
u y e u x (consoante o segmento U pertença ao eixo coordenado z , y
ou x ) podem escrever-se as seguintes razões:
uz u y ux
;
;
(fig 2).
U U U
Cada uma destas razões traduz um COEFICIENTE AXONOMÉTRICO, isto é, um coeficiente
segundo uma direcção axonométrica. Notar-se-ão os coeficientes dos eixos axonométricos x ' ,
y' e
z ' por C x , C y e C z , respectivamente.
Cada coficiente pode ser inferior, igual ou superior à unidade.
Se um coeficiente axonométrico for inferior a 1 diz-se COEFICIENTE DE REDUÇÃO.
Um coeficiente axonométrico é uma razão entre a projecção de uma medida (paralela a um
eixo coordenado) e a sua verdadeira grandeza.
Neste sentido, um coeficiente axonométrico expressa uma ESCALA AXONOMÉTRICA.
Quando as escalas axonométricas coincidem com os coeficientes de redução, a ESCALA DA
AXONOMETRIA é 1.
A noção de escala axonométrica pode ser alargada.
Suponha-se que à Axonometria se aplica uma homotetia. Neste caso, a escala da
axonometria deixa de ser 1 para passar a ser superior ou inferior a 1.
Designe-se por
Δ o factor da homotetia.
A escala da axonometria passará a ser
Δ e cada medida, u x , u y e u z , passará a valer
Δu x , Δu y e Δu z .
As razões
Δu z Δu y Δu x
;
;
também se designam por Escalas Axonométricas.
U
U
U
À semelhança dos coeficientes axonométricos, as escalas axonométricas podem ser iguais,
superiores ou inferiores a 1.
Designar-se-ão as escalas axonométricas dos eixos axonométricos x ' ,
y ' e z ' por E x , E y e
E z , respectivamente.
4.1.
Coeficientes iguais, superiores e inferiores a 1
Quando um eixo coordenado é paralelo ao quadro, o coeficiente axonométrico
correspondente é sempre 1.
49
Contudo, é possível que, mesmo que o eixo coordenado seja oblíquo ao quadro, o coeficiente
axonométrico seja igual a 1.
Considerem-se os pontos
X , Y e Z , vértices de um triângulo fundamental.
Considerem-se os traços tα , t β e tδ .
Considerem-se os eixos coordenados x , y e z (fig. 8).
[z]
Or
Z
[x]
[c ]
Y1
Or
[c ]
Or
MYZ
X1
M ZX
C
Or
Or
t
Y
M XY
Z1
X
t
t
[c ]
Or
[y]
Fig. 8
Identifique-se a projecção da origem, O , do referencial tri-ortogonal no quadro por O ' .
Notar-se-ão, no rebatimento dum plano
α,
as posições possíveis para a figura
A rebatida
por Arα e Arα ' .
Tome-se o traço tα como charneira de dois rebatimentos do plano
α
para o quadro.
Nos movimentos de rebatimento, o ponto O descreve arcos de circunferência contidos num
plano perpendicular à charneira tα . Notando que a projecção ortogonal do ponto O sobre o quadro
coincide com o ortocentro do triângulo fundamental
[X , Y , Z ] ,
o traço no quadro, do plano que
contém os arcos coincide, com a recta perpendicular ao traço tα conduzida pelo ponto
contém os pontos Orα e Orα ' .
Z . Esta recta
50
Sabendo que os eixos coordenados x e y são perpendiculares entre si no ponto O , então
as rectas xrα e y ra (não representadas) também deverão ser perpendiculares entre si no ponto Orα
ou Orα ' (dependendo do sentido do rebatimento), logo os pontos Orα e Orα ' devem estar contidos
[ ]
na circunferência cα de diâmetro
XY e centro M XY (ponto médio do segmento [ XY ] .
[ ]
Logo, os pontos Orα e Orα ' estarão na intersecção da circunferência cα
perpendicular à recta tα conduzida pelo ponto
com a recta
Z.
De modo semelhante se procede para obter os pontos Orβ e Orβ ' , e, Orδ e Orδ ' .
Note-se que, por exemplo, a distância Orα Y = OY .
Se o ponto O ' coincidir com o ponto Orα , então o coeficiente axonométrico
Se com centro no ponto
C y = 1.
Y e raio Orα Y se descrever a circunferência [ y ], determina-se o
lugar geométrico que o ponto O ' pode ocupar para que seja C y = 1 .
[] []
Procedendo de modo semelhante, obtêm-se as circunferências x e z que são os lugares
geométricos que o ponto O ' pode ocupar para que sejam as escalas axonométricas C x = 1 e
C z = 1 , respectivamente.
Se o ponto O ' estiver contido no círculo delimitado pela circunferência
coeficiente axonométrico
[ y ],
então o
C y < 1 , logo é um coeficiente de redução.
[]
Se o ponto O ' for exterior ao círculo delimitado pela circunferência y , então o coeficiente
axonométrico C y > 1 .
Se o ponto O ' estiver contido no círculo delimitado pela circunferência
[x ] ,
então o
coeficiente axonométrico C x < 1 , logo é um coeficiente de redução.
[]
Se o ponto O ' for exterior ao círculo delimitado pela circunferência x , então o coeficiente
axonométrico C x > 1 .
51
Se o ponto O ' estiver contido no círculo delimitado pela circunferência
[z ] ,
então o
coeficiente axonométrico C z < 1 , logo é um coeficiente de redução.
[]
Se o ponto O ' for exterior ao círculo delimitado pela circunferência z , então o coeficiente
axonométrico C z > 1 .
4.2.
Coeficientes como função da inclinação dos eixos e da direcção de
projecção
Considerem-se os pontos
X , Y e Z , vértices de um triângulo fundamental.
Considerem-se os traços tα ,
t β e tδ .
Considerem-se os eixos coordenados x ,
t
y e z (fig. 9)
t
Z
Y1
X1
O'
C
t
Y
X
Z1
Fig. 9
Sejam:
C o ortocentro do triângulo fundamental [ X , Y , Z ] ;
O a origem do referencial tri-ortogonal;
O ' a projecção da origem do referencial tri-ortogonal;
κ,ε
τ
e
ϕ
as inclinações dos eixos coordenados
y , x e z , respectivamente;
a inclinação da direcção de projecção;
ν, σ
e
[
]
λ
os ângulos que as projecções ortogonais dos eixos no quadro fazem com o
segmento CO ' .
A soma de quaisquer duas inclinações de dois eixos coordenados, relativamente ao quadro, é
sempre inferior a 90º , atingindo os 90 º se o plano que contiver os eixos for perpendicular ao quadro.
52
Este facto pode ser facilmente compreendido se se notar, por exemplo, que a soma dos
ângulos que os eixos coordenados x e y fazem com o traço tα é 90 º e que sendo XC > XZ1 e
YC > YZ1 , então os ângulos ε e κ são menores que os ângulos que os eixos coordenados x e y
fazem com a recta tα , respectivamente. Logo
Se o plano
α
ε + κ < 90º .
for perpendicular ao quadro, então as inclinações dos eixos coordenados x e
y com o quadro coincidem com os ângulos ε e κ , pelo que ε + κ = 90º .
Considere-se, agora, o coeficiente axonométrico C y .
Para efeitos de simplificação de cálculo vai considerar-se a medida OY = 1 .
Podem escrever-se as seguintes igualdades:
2
O 'Y O 'Y
=
= O'Y ⇔ C y2 = O'Y
1
OY
(1)
Cy =
(2)
YC = cos κ
(3)
OC = sin κ
(4)
CO' =
(5)
O'Y = YC + CO' − 2.YC.CO'. cosν
2
sin κ
tan τ
2
2
Substituindo os valores de (2), (3) e (4) em (5) vem:
2
O'Y = cos 2 κ +
sin 2 κ
⎛ sin κ ⎞
− 2 cos κ ⎜
⎟ cosν
2
tan τ
⎝ tan τ ⎠
Substituindo O' Y por C y vem:
53
C y2 = cos 2 κ +
sin 2 κ
⎛ sin κ ⎞
− 2 cos κ ⎜
⎟ cosν
2
tan τ
⎝ tan τ ⎠
Procedendo de forma semelhante para C x e C z tem-se:
C x2 = cos 2 ε +
sin 2 ε
⎛ sin ε ⎞
− 2 cos ε ⎜
⎟ cos σ
2
tan τ
⎝ tan τ ⎠
C z2 = cos 2 ϕ +
sin 2 ϕ
⎛ sin ϕ ⎞
− 2 cos ϕ ⎜
⎟ cos λ
2
tan τ
⎝ tan τ ⎠
4.2.1. A axonometria ortogonal como caso particular
Se o ângulo
τ = 90º , então tan τ = ∞ , donde:
C y = cos κ
C x = cos ε
C z = cos ϕ
Neste caso (mas não só neste caso) todos os coeficientes são de redução, isto é, todos os
coeficientes são inferiores a 1.
Verifica-se que, sendo o ângulo
τ = 90º ,
isto é, sendo a Axonometria Ortogonal, os
coeficientes de redução não são independentes uns dos outros.
Podem escrever-se as seguintes igualdades:
(1)
C y2 = cos 2 κ = sin 2 (90 − κ ) = 1 − cos 2 (90 − κ )
(2)
C x2 = cos 2 ε = sin 2 (90 − ε ) = 1 − cos 2 (90 − ε )
(3)
C z2 = cos 2 ϕ = sin 2 (90 − ϕ ) = 1 − cos 2 (90 − ϕ )
54
Somando ordenadamente as três igualdades (1), (2) e (3) tem-se:
(4)
(
)
C y2 + C x2 + C z2 = 3 − cos 2 (90 − κ ) + cos 2 (90 − ε ) + cos 2 (90 − ϕ )
Notando que (90 − κ ) , (90 − ε ) e (90 − ϕ ) são os ângulos que a recta O.C faz com os
eixos coordenados e sabendo que a soma dos quadrados dos cosenos dos ângulos que uma recta faz
com os eixos de um referencial tri-ortogonal é igual a 1, da expressão (4) resulta que:
(5)
C y2 + C x2 + C z2 = 2
Desta expressão pode entender-se que dados dois coeficientes de redução o terceiro não é
independente. Também se pode concluir que a soma dos quadrados de dois coeficientes de redução
nunca pode ser igual ou superior a dois.
Sendo C y < 1 , C x < 1 e C z < 1 resulta que: C y < 1 , C x < 1 e C z < 1 , logo se deduz que,
2
2
2
para que a expressão (5) possa corresponder a um triângulo fundamental, a soma dos quadrados de
quaisquer dois coeficientes de redução deverá ser sempre superior a 1 e, por conseguinte, deverá ser
sempre superior ao quadrado do terceiro. Esta condição fica automaticamente verificada se a soma
dos quadrados dos dois coeficientes menores for superior a 1.
Da mesma forma, na axonometria ortogonal, não são independentes os valores u x , u y e u z
(fig.1).
Recorde-se que:
(6)
Cy =
uy
(7)
Cx =
ux
U
(8)
Cz =
uz
U
U
55
Substituindo os valores de (6), (7) e (8) em (5) tem-se:
(u
(7)
2
y
+ u x2 + u z2
U
2
)=2⇔u
2
y
+ u x2 + u z2 = 2U 2
Recordando que para os valores das escalas axonométricas se tem:
Ey =
Δu y
U
Ex =
Δu x
U
Ez =
Δu z
U
Donde resulta que:
(8)
uy =
E yU
(9)
ux =
E xU
Δ
(10)
uz =
E zU
Δ
Δ
Substituindo os valores de (8), (9) e (10) em (7) tem-se:
E y2 + E x2 + E z2 = 2Δ2
Podem ainda expressar-se os valores dos coeficientes de redução como função dos ângulos
axonométricos
α̂ , β̂
C = YZ (fig. 10).
e δˆ , e como função dos lados do triângulo fundamental
A = XY , B = XZ e
56
Dada a extensão dos cálculos, estes são apresentados em anexo.
Or
Z
zr
zr
Or
z'
C
B
yr
xr
O'
x'
y'
t
Y
X
A
xr
yr
t
t
Or
Fig. 10
Como função dos ângulos axonométricos tem-se:
Cy =
1
cos α . cos δ
1−
cos β
Cx =
1
cos β . cos α
1−
cos δ
Cz =
1
cos δ . cos β
1−
cos α
Como função dos lados do triângulo fundamental tem-se:
Cy = B
Cx = C
Cz = A
(
2 A2 − B 2 + C 2
(
)
4B A − B − C + A
2
2
(
2
2
2 B 2 − C 2 + A2
(
)
4C 2 B 2 − C 2 − A 2 + B
(
2 C 2 − A2 + B 2
(
)
4A C − A − B + C
2
2
2
2
)
Cy = B
)
Cx = C
2 2
2 2
)
2 2
Cz = A
(
2 A2 − B 2 + C 2
(
)
4B C − B + C − A2
2
2
(
2
2
2 B 2 − C 2 + A2
(
)
4C 2 A 2 − C 2 + A 2 − B 2
(
2 C 2 − A2 + B 2
(
)
4A B − A + B − C 2
2
2
2
2
)
2
)
2
)
2
Os resultados da segunda coluna são obtidos dos da primeira por permutação cíclica parcial.
57
4.3.
Isometria6 e anisometria
Se as três escalas axonométricas forem iguais a 1, ou os três coeficientes axonométricos
forem iguais a 1, identificar-se-á o sistema por SISTEMA AXONOMÉTRICO ISOMÉTRICO.
Se o facto anterior não se verificar identificar-se-á o sistema por SISTEMA AXONOMÉTRICO
ANISOMÉTRICO.
4.4.
Monometria, dimetria e trimetria
Identifica-se por SISTEMA AXONOMÉTRICO MONOMÉTRICO aquele em que todos os
coeficientes ou escalas axonométricos são iguais, por SISTEMA AXONOMÉTRICO DIMÉTRICO
aquele em que dois coeficientes ou escalas axonométricos são iguais e diferentes do terceiro e por
SISTEMA AXONOMÉTRICO TRIMÉTRICO aquele em que todos os coeficientes ou escalas
axonométricos são diferentes. De uma forma mais simples, podem identificar-se as axonometrias por
MONOMETRIA, DIMETRIA ou TRIMETRIA.
Uma isometria é sempre uma monometria. Uma monometria nem sempre é uma isometria.
Em geral, o sistema axonométrico é trimétrico.
Para que o sistema seja dimétrico, dois coeficientes axonométricos devem ser iguais.
Considerem-se, por exemplo, os pontos X (traço do eixo coordenado x no quadro), Y
(traço do eixo coordenado y no quadro) e recta tα (traço do plano coordenado
α
no quadro).
Designe-se por O ' a projecção da origem do referencial tri-ortogonal no quadro, e esta por O
(fig.11).
y
O'(XO',YO' )
YO'
D
Y(0,0)
a
d
X(a,0)
X O'
t =x
Fig. 11
6
Neste texto a definição de Isometria será sempre utilizada no sentido de caracterizar um sub-sistema axonométrico
em que os coeficientes ou escalas são todos iguais a 1. Em geral utilizam-se os termos Isometria e Monometria com
o mesmo sentido. Aqui opta-se por distinguir os significados. Esta opção é da responsabilidade do autor.
58
Associe-se ao quadro um referencial cartesiano
x. y (não confundir com x e y do
referencial tri-ortogonal), fazendo coincidir o eixo x com a recta tα e ponto
Para que sejam
C x = C y , deverão ser
Y com a origem.
ux u y
=
(fig. 2)
U U
Perante isto coloca-se a questão de saber qual o lugar geométrico a que o ponto O ' pode
pertencer para que se verifique
Cx = C y .
Do exposto, pode deduzir-se:
Cx =
Para que
u x OX
=
U O 'Y
e Cy =
uy
U
=
OY
O 'Y
C x = C y , deve ser:
OX
OY
OY O'Y
=
⇔ OX .O'Y = OY .O' X ⇔
=
O' X O 'Y
OX O' X
Sendo constantes OY e OX , pode escrever-se:
O 'Y
=K
O' X
Isto é, o lugar geométrico a que o ponto O ' pode pertencer é tal que a razão das suas
distâncias aos pontos fixos
X e Y é um valor constante igual a K .
Escreva-se O ' Y = D , O ' X = d e YX = a , donde
(1)
K2 =
D2
d2
D
= K , o que equivale a:
d
59
Da figura 11 pode deduzir-se:
(2)
D 2 = X O2 ' + YO2'
(3)
d 2 = ( X O ' − a ) + YO2'
2
Desenvolvendo a razão (1) substituindo nela os valores de (2) e (3) tem-se:
K2 =
X O2 ' + YO2'
(X O' − a)
2
+Y
2
O'
(
)
(
)
⇔ 1 − K 2 X O2 ' + 1 − K 2 YO2' + 2aK 2 X O ' − a 2 K 2 = 0
A equação do segundo membro da equivalência é do tipo
representa uma circunferência com centro no eixo
x 2 + y 2 + ax + b = 0 que
x.
Veja-se agora, na figura 12, como definir graficamente a circunferência, identificada por
[d xy ] , para o que são necessários três pontos:
[dxy]
Z
Y1
Or
X1
C
t
Y
1
Z1
X''
X
M
t
t
Or
[c ]
X'
Fig. 12
60
Tal como enunciado, para que
C x = C y , deve ser
Quando o ponto O ' coincide com um dos pontos
O'Y OY
=
=K
O' X OX
Orα ou Orα ' (posições possíveis para o
rebatimento da origem do referencial tri-ortogonal para o quadro) tem-se
circunferência
[d xy ] passa pelos pontos Orα
Determinar-se-á, agora, um ponto
e
O'Y OY
=
= K , logo a
O' X OX
Orα ' (note-se que nestes casos C x = C y = 1 ).
X ' ' sobre o traço tα , de modo a que se verifique
X ' 'Y
= K , isto é, de modo a que X ' ' pertença à circunferência [d xy ] .
X '' X
Considere-se o segmento
[YOrα ]
e, no seu prolongamento, o segmento
[Orα X ']
tal que
Orα X ' = Orα X .
Pelo ponto
A recta
Orα conduz-se a recta Orα .X ' ' paralela à recta X '.X .
[ ]
Orα .X ' ' intersecta a recta tα no ponto X ' ' por onde passa d xy .
Este facto verifica-se se se demonstrar que
Sendo
X ' 'Y
=K.
X '' X
Orα Y = OY , Orα X ' = Orα X = OX verifica-se que
[
Sendo homotéticos os triângulos Y , X ' ' , Orα
resulta que
Orα Y
OY
=
=K
Orα X ' OX
] e [Y , X , X '] tem-se
Orα Y
X ' 'Y
, donde
=
Orα X ' X ' ' X
X ' 'Y
= K , como se queria demonstrar.
X '' X
A circunferência
[ ]
[d xy ]
passa pelos pontos Orα , Orα ' e
[
X ' ' . O centro da
]
circunferência d xy é o ponto 1 de intersecção da mediatriz do segmento Orα X ' ' com a recta tα .
61
[ ]
Concluindo, se o ponto O ' pertencer à circunferência d xy tem-se C x = C y .
Pode proceder-se de igual modo para os restantes pares de eixos de modo a obter as
[ ] [ ]
circunferências d yz e d zx de centros nos pontos 3 e
coordenado
β
2 pertencentes às rectas t β (traço do plano
no quadro) e tδ (traço do plano coordenado
δ
no quadro), respectivamente.
[ ]
C y = Cz .
Se o ponto O ' pertencer à circunferência [d zx ] tem-se C z = C y .
Se o ponto O ' pertencer à circunferência d yz tem-se
A figura 13 representa a síntese desse procedimento para o caso em que os três eixos
coordenados são oblíquos ao quadro.
2
[dzx]
Or
[dxy]
Z
Or
Or
Y''
I'
Z''
I O
r
C
Or
1
t
X''
X
Y
t
Or
t
[dyz]
3
Fig.13
Verifica-se que os pontos
respectivamente, são colineares.
1 , 3 e 2 , centros das três circunferências [d xy ] , [d yz ] e [d zx ],
62
Note-se:
[ ]
Suponham-se determinadas, por exemplo, a circunferência d xy , de centro no ponto
circunferência
[d yz ] ,
de
centro
obrigatoriamente em dois pontos,
no
ponto
1, e a
3 . Estas duas circunferências intersectam-se
I e I ' (note-se que o ortocentro do triângulo fundamental, C , é
um ponto sempre contido nos círculos delimitados por estas circunferências) simétricos relativamente
à recta 1.2 . Se o ponto O ' coincidir com um destes pontos,
monométrico, isto é,
Sendo
I ou I ' , o sistema axonométrico é
O' X O 'Y O ' Z
.
=
=
OX
OY
OZ
O' X O' Z
, então os pontos I e I ' pertencem à circunferência [d zx ] .
=
OX
OZ
Como o ponto
2 , centro da circunferência [d zx ] , pertence ao traço tδ e a recta 1.3 é a
[ ]
mediatriz do segmento II ' , então o ponto 2 é o resultado da intersecção entre a recta 1.3 e o traço
tδ .
Logo, tal como se queria verificar os pontos 1 , 3 e 2 são colineares.
Veja-se, agora, o que sucede no caso em que um eixo coordenado é paralelo ao
quadro. Considere-se, por exemplo, que o eixo coordenado
t
z é paralelo ao quadro (fig. 14).
t
[dxy]
[dzx]
O r =I'
[dyz]
1
Or
Y=3 Or
X''
C
Or
Or
X=2
t
Or =I
Fig. 14
[ ] [ ] [ ]
Neste caso, os três centros 1 , 3 e 2 das circunferências d xy , d yz e d zx estão contidos
na recta tα . Note-se que esta é uma situação limite da anterior quando o ponto Z tende para o
infinito.
63
Os pontos I e I ' coincidem com os pontos Orα e Orα ' .
Quando um eixo é paralelo ao quadro, as monometrias são sempre de coeficientes
axonométricos iguais a 1, isto é, são isometrias.
Note-se que pode ser outro eixo paralelo ao quadro, pelo que, com as devidas permutações,
as conclusões serão as mesmas.
Considere-se agora, por exemplo, que os eixos coordenados x e
z são paralelos ao quadro
(fig. 15).
t
Or
Or
Or
t
Y=C
[i]
Or
Fig. 15
Supõe-se conhecida a distância do ponto O ao quadro, que se traduz no raio da
[]
circunferência i que mede OC .
Nesta situação só é possível ter sistemas axonométricos dimétricos ou isométricos.
Como um dos planos coordenados é paralelo ao quadro, os coeficientes axonométricos
correspondentes são iguais a 1, neste caso, C x = 1 e C z = 1 .
[]
Se o ponto O ' estiver contido na circunferência i , então o coeficiente axonométrico
C y = 1,
logo o sistema axonométrico é monométrico. Isto é, a inclinação da projecção relativamente ao quadro
é 45º .
64
Se a inclinação for superior a 45º , então o coeficiente
C y < 1 , e se a inclinação for inferior a
45º então o coeficiente C y > 1 . Nestes casos o sistema axonométrico é dimétrico.
Mais uma vez se adverte que pode ser outro o plano coordenado paralelo ao quadro, pelo que
a validade das conclusões deve considerar as devidas permutações.
4.4.1. A axonometria ortogonal como caso particular
Na axonometria ortogonal, o ponto O ' (projecção da origem do referencial tri-ortogonal no
[
]
quadro) coincide sempre com o ortocentro C do triângulo fundamental X , Y , Z .
Se o triângulo fundamental for escaleno, então a axonometria obtida é trimétrica (fig. 13). Os
três ângulos axonométricos são diferentes. As inclinações dos eixos coordenados, relativamente ao
quadro, são diferentes.
Se o triângulo fundamental for isósceles, então a axonometria obtida é dimétrica.
Como exemplo, suponha-se, na figura 13, que as medidas ZY = ZX . Neste caso, a
[ ]
circunferência d xy degenera na recta perpendicular ao traço tα , passante pelo ponto
Z . Esta recta
passa pelo ponto C . Ainda neste caso, são iguais os ângulos axonométricos δˆ (ângulo axonométrico
[ ]
oposto ao segmento ZY ) e
inclinações,
κ
e
β̂
[ ]
(ângulo axonométrico oposto ao segmento ZX ) e são iguais as
ε , relativamente ao quadro, dos eixos coordenados y
e x , e por consequência o
coeficiente C y = C x .
Se o triângulo fundamental for equilátero, então a axonometria obtida é monométrica.
Suponha-se, na figura 13, que as medidas ZY = ZX = XY . Neste caso, as circunferências
[d yz ], [d zx ] e [d xy ] degeneram em rectas que passam pelos pontos
são perpendiculares aos traços tδ ,
X , Y e Z , respectivamente, e
t β e tα , respectivamente. Estas rectas passam todas pelo ponto
C . Nesta situação, os três ângulos axonométricos são iguais a 120º, as inclinações, relativamente ao
quadro, dos eixos coordenados são iguais, e, por consequência o coeficiente
C y = Cx = Cz .
Em todos os casos, os ângulos axonométricos estão sempre compreendidos entre o ângulo
recto e o ângulo raso.
65
No caso em que um eixo é paralelo ao plano de projecção, o plano coordenado que lhe é
perpendicular tem representação reduzida a uma recta.
No caso particular em que um eixo coordenado é perpendicular ao plano de projecção, os
planos coordenados que nele incidem têm representação reduzida a rectas.
66
5.
Axonometrias afins7
Considerem-se dados um referencial tri-ortogonal, uma direcção de projecção e um quadro.
O resultado da projecção do referencial no quadro são os eixos axonométricos.
Fixe-se uma recta qualquer no quadro. Tome-se a referida recta como eixo de um feixe de
planos. Em cada plano do feixe pode obter-se uma projecção do referencial, considerando a direcção
de projecção dada.
Todas as projecções do referencial assim obtidas são afins umas das outras, isto é, todas as
axonometrias assim obtidas são afins umas das outras.
O eixo de cada afinidade é o eixo do feixe de planos e a direcção de cada afinidade é a
direcção de projecção.
Se rebatermos todos os planos do feixe para o quadro, todas as projecções do referencial,
rebatidas, continuarão a ser afins umas das outras.
O eixo de cada afinidade continua a ser eixo do feixe.
Cada afinidade tem a sua direcção própria que pode ser obtida unindo um ponto do quadro ao
ponto rebatido que lhe é afim.
Resumindo, duas axonometrias que possam ser consideradas como projecção uma da outra
dizem-se AXONOMETRIAS AFINS.
Se uma das axonometrias for rebatida para o plano da outra, as axonometrias continuam a
ser afins.
7
O conceito de axonometrias afins é introduzido pelo autor.
67
6.
Determinação de referenciais
Um referencial pode ser determinado em posição ou em orientação (determinando apenas as
direcções dos eixos e não fixando as suas posições no espaço). Em geral, em termos práticos, é
suficiente conhecer a orientação do referencial podendo a posição permanecer indeterminada ou
podendo ser arbitrada.
Contudo, neste capítulo, enunciam-se as condições segundo as quais é possível determinar a
posição de um referencial, ou, pelo menos, de um número finito de referenciais. É de notar que a
determinação de um referencial em posição passa muitas vezes pela determinação do referencial em
orientação que depois, por meio de uma translacção, se coloca em posição.
Antes de se avançar para as questões concretas relativas a este capítulo, convém explicitar
alguns factos geométricos que serão utilizados adiante.
F1)
[α ] dada pela sua projecção ortogonal no quadro, [α ]' '
[α ]' ' é delimitado pela circunferência [cα ] , intersecção da superfície [α ] com o
Considere-se uma superfície esférica
(fig. 16). O círculo
quadro.
[c ]''
V=Vr =(e)''
[c]''
r
r
A''
r
A 1=A 1r
g''=(h )=(h r)
[c] r
r
er
r
Ar
gr
Fig. 16
Considere-se, ainda, uma superfíce cónica de eixo e tangente à superfície esférica
ponto V
pertencente ao quadro. O ponto V
[α ] num
é o vértice da superfície cónica. O eixo e é
perpendicular ao quadro. As geratrizes da superfície cónica fazem com o eixo e um ângulo constante
ϕ.
68
Considere-se uma geratriz
ortogonal no quadro
geratriz
g qualquer da superfície cónica, dada pela sua projecção
g ' ' . A recta g ' ' intersecta a circunferência [cα ] nos pontos V e A1 . Qualquer
g da superfície cónica mantém um ângulo ϕ constante com o eixo e e intersecta a
superfície esférica
[α ] em dois pontos, V
π
A . Para qualquer geratriz g , o ponto V é fixo.
g ' ' é o plano π que intersecta o quadro segundo a recta hπ ≡ g ' ' .
O plano definido por g e
O plano
e
intersecta a superfície esférica
[α ] segundo uma circunferência [c ] de diâmetro
VA1 e passante pelos pontos V e A1 .
Para representar, na figura, o ângulo
ϕ,
considera-se o rebatimento do plano
π
para o
quadro em torno da recta hπ ≡ hπr . Com esta operação representa-se a recta g r (a geratriz g
rebatida), a circunferência
[c]r
intersecção da circunferência
[]
(a circunferência c redatida), o ponto Ar (o ponto
[c]r
A rebatido) na
com a recta g r , o que permite representar A' ' (projecção
ortogonal do ponto A no quadro).
Analisando:
Para qualquer geratriz g , e respectivo plano
[
π , obtém-se um triângulo [V , A, A1 ].
]
Para o triângulo V , A, A1 pode escrever-se a razão
Como o ângulo
razão
ϕ
VA' '
.
VA1
[
]
é constante, todos os triângulos V , A, A1 são semelhantes, pelo que a
VA' '
= K , donde VA' ' = K .VA1 .
VA1
Como o ponto V é fixo, a igualdade VA' ' = K .VA1 expressa uma homotetia de centro V .
Os pontos A' ' são homotéticos dos pontos A1 .
[ ]
Como os pontos A1 pertencem a uma circunferência cα , então os pontos A' ' pertencem a
uma circunferência8 homotética desta. Ambas as circunferências são tangentes entre si no ponto V .
8
O Professor Augusto Queiróz nas suas Lições de Geometria Descritiva (vidé bibliografia), pp. 161 e 162, designa
esta circunferência por círculo de redução.
69
F2)
[]
Considere-se uma circunferência c
plano rectangular
com centro na origem de um referencial cartesiano
x. y , de origem O , e uma recta s qualquer (fig. 17).
P(X,Y)
y
D1
4
d
D
a
r
1
T2
Z1
Z2
d1
T1
C
O
X
2
b
E
F
[c]
D1
3
s
P(X,Y)
Fig.17
[]
A cirunferência c intersecta o eixo x nos pontos T1 e T2 .
Identifique-se por
do ponto
F o ponto de intersecção da recta s com o eixo y e por b o afastamento
F.
Identifique-se por m o declive da recta s .
[]
Por um ponto X qualquer (exterior à circunferência c e contido no eixo x ) conduza-se
uma recta paralela ao eixo y . Esta recta intersecta a recta s . Identifique-se por d1 a distância de X
ao ponto de intersecção com s e por
Pelo ponto
X a sua abcissa.
X conduzam-se as rectas tangentes à circunferência [c ] . Identifique-se por a a
distância do ponto X aos pontos de tangência (na figura apenas está representada uma tangente).
70
Conduza-se o raio
r da circunferência [c ] pelo ponto de tangência e, no seu prolongamento
[]
para o exterior da circunferência c , marque-se a distância d = d1 . Una-se o extremo (oposto ao
ponto de tangência) deste prolongamento ao ponto X , definindo o segmento D .
Os segmentos
D , a e d são os lados de um triângulo, rectângulo no ponto de tangência do
[]
segmento a com a circunferência c .
Sobre a paralela ao eixo
y passante pelo ponto X marque-se, a partir do ponto X , no
sentido positivo e no sentido negativo, a distância D1 = D . Os pontos
P são os extremos dos
segmentos que marcam estas distâncias.
[]
Para qualquer ponto X (exterior a c ) pertencente ao eixo x , qual o lugar geométrico que
os pontos
P podem ocupar?
Se o ponto
X coincidir com o ponto T1 ou T2 , os pontos P coincidem com os pontos 1 e 2 ,
ou 3 e 4 , uma vez que nestes casos a = 0 e d = D .
No caso geral pode escrever-se:
(1)
D2 = a2 + d 2
(2)
X 2 = r 2 + a2 ⇔ a2 = X 2 − r 2
Relativamente à recta s pode-se representá-la por:
(3)
Y = mX + b
Para a recta s o valor Y = d1 = d , donde:
(4)
d = mX + b
Substituindo em (1) os resultados (2) e (4), tem-se:
(5)
D 2 = X 2 − r 2 + (mX + b )
2
71
Como D corresponde ao afastamento de P , pode escrever-se (fazendo Y = D ):
Y 2 = X 2 − r 2 + (mX + b )
2
que desenvolvido vem:
(
)
Y 2 = X 2 m 2 + 1 + X (2bm ) + b 2 − r 2
(6)
o que representa uma hipérbole com centro no eixo x .
Esta hipérbole intersecta o eixo x nos pontos Z1 e Z 2 .
Verifica-se que a recta perpendicular à recta s conduzida pelo ponto O intersecta a recta s
num ponto E , pelo qual passa uma recta paralela ao eixo y que intersecta o eixo x no centro C da
hipérbole.
Demonstrando:
Em 1º lugar:
determina-se a abcissa do centro da hipérbole.
Se em (6) se fizer Y = 0 , podem determinar-se as abcissas dos pontos Z 1 e Z 2 , o que se
traduz em:
X=
− bm ± m 2 r 2 − b 2 + r 2
m2 +1
Determinando o ponto médio entre estas duas coordenadas tem-se:
(7)
X=
− bm
m2 +1
que corresponde à abcissa do centro da hipérbole.
Em 2º lugar:
se se conduzir pelo ponto O uma recta perpendicular à recta s , pode-se representá-la por:
72
Y =−
(8)
1
X
m
Para determinar a abcissa do ponto
E de intersecção desta recta com a recta s , substitui-se
o primeiro membro de (8) pelo segundo membro de (3), o que resulta em:
mX + b = −
1
X
m
o que desenvolvido vem:
X=
(9)
− bm
m2 +1
Notando que a abcissa do ponto E é igual à abcissa do ponto C , esta está assim
determinada.
Como (7) e (9) expressam a mesma igualdade verifica-se que o ponto C é o centro da
hipérbole.
As assímptotas da hipérbole podem ser determinadas graficamente por meio de uma
homologia.
F3)
Qualquer elipse pode ser considerada como projecção cilíndrica de uma circunferência cujo
diâmetro esteja compreendido entre as medidas do eixo menor e do eixo maior, inclusivé.
F4)
Qualquer elipse pode ser considerada como projecção cilíndrica de uma esfera cujo diâmetro
é igual ao eixo menor da elipse.
Após se explicitarem estes factos geométricos, passar-se-á para as questões concretas
relativas a este capítulo, isto é, as condições segundo as quais é possível determinar a posição de um
referencial.
73
6.1.
Dados os vértices do triângulo fundamental
Esta questão já foi discutida em sub-capítulos anteriores.
Sejam dados os pontos X , Y e Z , vértices do triângulo fundamental (fig. 18).
Z
[c] r
Or
Y1
dr
X1
C
t
X
Y
t
t
Fig. 18
Tal como já foi visto, a projecção ortogonal no quadro da origem O do referencial tri-ortogonal
coincide com o ortocentro do triângulo fundamental, C .
Para determinar o ponto C é suficiente conduzir, por dois vértices do triângulo, rectas
perpendiculares aos lados opostos. Neste caso, pelo vértice
ao traço
Y conduziu-se uma recta perpendicular
t β , de pé Y1 , e pelo vértice X conduziu-se uma recta perpendicular ao traço tδ , de pé X 1 .
Estas duas rectas intersectam-se no ponto C .
Sabe-se que cada eixo coordenado é perpendicular, no ponto O , ao plano definido pelos
outros dois. Por exemplo, o eixo coordenado x é perpendicular ao plano coordenado
qualquer recta do plano
δ
δ
. Logo,
passante pelo ponto O é perpendicular ao eixo coordenado x .
Se se considerar o plano perpendicular ao quadro passante pelo eixo coordenado x , este
intersecta o plano
δ
segundo a recta O.X 1 perpendicular ao eixo coordenado x . Rebatendo este
plano para o quadro (a charneira é o seu traço no quadro e coincide com a recta X .X 1 ) pode
determinar-se a distância d da origem do referencial ao quadro. Considerando a referida operação de
rebatimento obtem-se d r ( d rebatido).
É, mais uma vez, de notar que o ponto O pode ser considerado “acima” ou “abaixo” do
quadro.
74
6.2.
Dados dois vértices do triângulo fundamental, X e Y, e as inclinações
dos eixos coordenados correspondentes
ε
Sejam dados dois vértices do triângulo fundamental, X e Y , e
e
κ , respectivamente as
inclinações dos eixos coordendados x e y com o quadro (fig. 19).
Z
t
t
e Xr
e Yr
X1
Y1
C
t
Y=(eY)''=Yr
M XY
2''
r
1''
X=(eX)''=X r
[b]''
C1
[a]''
r
[c ]=[c] r
1r
2r
Fig. 19
Considere-se a superfície esférica
[α ] de diâmetro
XY e centro no ponto M XY (ponto médio
[ ]
do segmento XY ). Esta superfície esférica contém o ponto O (origem do referencial tri-ortogonal) e
[ ]
intersecta o quadro segundo a circunferência cα .
Pelo ponto
Y passa o eixo coordenado y . É conhecida a inclinação κ com o quadro.
O eixo coordenado y deverá ser uma geratriz de uma superfície cónica de revolução, de
vértice
Y e eixo e y perpendicular ao quadro, cujas geratrizes fazem κ º com o quadro. O ponto O
[]
deverá ser um ponto da linha a de intersecção da superfície cónica com a superfície esférica
[α ].
[]
Analogamente, o ponto O deverá ser um ponto da linha b de intersecção da superfície
cónica de vértice
esférica
[α ].
X , eixo e x perpendicular ao quadro, cujas geratrizes fazem ε º , com a superfície
75
[]
Isto é, as possíveis origens do referencial correspondem aos pontos comuns às linhas a e
[b].
[]
Para determinar a linha a procede-se do seguinte modo:
Considera-se um plano passante pelo eixo e y da superfície cónica que contém o eixo
coordenado y (neste caso é conveniente considerar um plano passante pelos eixos das duas
superfícies cónicas,
e y e e x , por uma questão de economia de traçado). Este plano intersecta o
quadro segundo o traço tα .
Este plano, passante pelo eixo
e y , intersecta a superfície cónica (com este eixo) segundo
duas geratrizes, uma das quais é a a recta Y .1 (representada em rebatimento por Yr .1r ), e intersecta
a superfície esférica
[α ]
segundo uma circunferência
[c]
(representada em rebatimento por
[c]r ≡ [cα ] ).
[]
A geratriz Y .1 intersecta a circunferência c no ponto 1 (determinado em rebatimento pela
[ ]r
intersecção da circunferência c
com a recta Yr .1r ). O ponto
1 , tal como o ponto Y , pertence à
[]
[]
linha a . Como já se verificou (pelo facto geométrico F1), a projecção ortogonal da linha a no
[]
quadro, isto é a ' ' , é uma circunferência de diâmetro
Y 1' ' passante pelos pontos Y e 1' ' (sendo o
ponto 1' ' a projecção ortogonal no quadro do ponto 1 ).
[]
Para determinar a linha b , o procedimento é semelhante.
As posições possíveis para o ortocentro do triângulo fundamental correspondem à intersecção
[]
[]
das duas circunferências a ' ' e b ' ' , isto é, os pontos C e C1 . Deve recordar-se que, para que
estes pontos existam, deve ser
ε + κ < 90º .
Neste caso há quatro posições possíveis para a origem do referencial.
Opta por considerar-se apenas as duas que correspondem ao ponto C .
Tendo determinado o ponto C , a determinação do vértice Z , do triângulo fundamental é
imediata e consiste em conduzir pelo ponto Y uma recta perpendicular à recta X .C e por X uma
recta perpendicular à recta Y.C . O ponto de intersecção destas duas rectas é o ponto
Z.
Tendo todos os vértices do triângulo fundamental, a questão reduz-se à enunciada em 6.1.
76
6.3.
Dados dois vértices do triângulo fundamental, X e Y, e as inclinações
dos eixos coordenados y e z
Sejam dados dois vértices do triângulo fundamental,
eixos coordenados y e z , respectivamente. Deve ser
X e Y , e as inclinações κ e ϕ dos
κ + ϕ < 90º
(fig. 20).
[c]''
(t )=e Yr=i ''=g''
Sr
S''
h''
U''
r
T''
i
r
C
y''
t =e Yr1
1''
Y=Yr =(eY)''
M XY
r
X
r
y1 ''
C1
[a]''
gr
[c ]
1r
E''
Er
Fig. 20
Tal como em 6.2, será considerada uma superfície esférica
[α ] de diâmetro
XY e centro no
[ ]
ponto M XY (ponto médio do segmento XY ). Esta superfície esférica contém o ponto O (origem do
[ ]
referencial tri-ortogonal) e intersecta o quadro segundo a circunferência cα .
Pelo ponto
Y passa o eixo coordenado y . É conhecida a sua a inclinação κ com o quadro.
O eixo coordenado y deverá ser uma geratriz de uma superfície cónica de revolução, de
vértice Y e eixo e y perpendicular ao quadro, cujas geratrizes fazem
[]
κº
com o quadro. O ponto O
deverá ser um ponto da linha a de intersecção da superfície cónica com a superfície esférica
O plano coordenado
α , que contém os eixos coordenados x
quadro que é complementar de
ϕ,
isto é, o plano
duas posições possíveis para o plano
uma.
α,
α
[α ].
e y , tem uma inclinação com o
faz (90º −ϕ ) com o quadro. Note-se que há
embora, para efeitos da explicação, apenas se considere
77
A intersecção do plano
α
com a superfície cónica corresponderá às posições possíveis que o
eixo coordenado y poderá ocupar. Para um plano
α
haverá duas posições possíveis para o eixo
coordenado y .
[]
Na intersecção do eixo coordenado y com a linha a tem-se a origem do referencial triortogonal, O .
[]
[]
A determinação da linha a e consequentemente da linha a ' ' faz-se como em 6.2.
Para determinar a intersecção do plano coordenado
α
com a superfície cónica utiliza-se um
plano auxiliar qualquer paralelo ao quadro. Este plano intersecta a superfície cónica segundo uma
[]
[]
circunferência c , de projecção ortogonal no quadro c ' ' .
Se se considerar o plano
plano contém o eixo
π
tangente à superfície esférica
[α ] no ponto Y
(note-se que este
e y da superfície cónica) verifica-se que este intersecta a superfície cónica
segundo uma geratriz g , de projecção ortogonal no quadro
g ' ' . A geratriz g intersecta a
[]
circunferência c no ponto E .
O plano
π
intersecta o plano coordenado
α
segundo a recta iα , de projecção ortogonal no
[]
quadro iα ' ' . A recta iα intersecta o plano da circunferência c no ponto S . Pelo ponto S passa a
recta h paralela ao traço tα (intersecção do plano coordenado α com o quadro) que corresponde à
intersecção do plano coordenado
α
[]
com o plano da circunferência c .
[]
A recta h intersecta a circunferência c nos pontos T e U por onde passam as rectas y e
y1 que correspondem, considerado o plano coordenado α , às posições possíveis do eixo
coordenado y .
Para determinar graficamente estes pontos procede-se do seguinte modo:
Considera-se o rebatimento do plano
valor de
κ , pode representar-se a recta g r
π
para o quadro. Com esta operação, conhecido o
(geratriz
g rebatida) que encontra a recta perpendicular
a (tπ ) , conduzida pelo ponto E ' ' (projecção ortogonal do ponto E no quadro), no ponto E r (ponto
E rebatido). Pelo ponto E r conduz-se a recta E r .S r que encontra a recta iαr (recta iα rebatida para
o quadro) no ponto S r
(ponto S rebatido para o quadro). Pelo ponto S r conduz-se a recta h' '
78
tα . A recta h' ' intersecta a
(projecção ortogonal da recta h no quadro) paralela ao traço
[]
circunferência c ' ' nos pontos
T ' ' e U ' ' e intersecta a recta iα ' ' no ponto S ' ' .
y , dado pela sua projecção ortogonal no quadro y ' '
Após determinado o eixo coordenado
(apenas se está a considerar uma das soluções), é imediata a determinação do ponto C , ortocentro
do triângulo fundamental, e do ponto
Z.
Determinado o ponto C , o problema reduz-se ao enunciado em 6.2.
6.4.
Dados dois vértices do triângulo fundamental e as grandezas das
projecções de três segmentos unitários, ux, uy e uz, e a direcção de
projecção ortogonal ao quadro
Sejam dados os vértices do triângulo fundamental,
X e Y , e as grandezas das projecções
de três segmentos unitários u x , u y e u z , e a direcção de projecção ortogonal ao quadro (fig. 21)9.
t
X
Y
A
ux
ux
B
uy
[c]
uz
uy
[a]
E
M AD
C
ux
uy
U
uz
D
U
Fig. 21
Nestas condições verifica-se:
u x2 + u y2 + u z2 = 2U 2
Recorde-se que, em função dos dados, deverá verificar-se a desigualdade:
u x2 + u y2 > u z2
9
Pode ser encontrado outro modo de resolver este problema no livro geometría descriptiva de F. Izquierdo Asenci,
pp. 172 e 173 (vidé bibliografia). Nessa resolução faz-se uso do teorema de Scholomilch e Weisbach, cujo enunciado
pode aí ser encontrado.
79
Na construção indicada (à direita na figura) tem-se:
2
2
AD = u x2 + u y2 + u z2 donde AD = 2U 2 .
[]
A verificação da desigualdade u x + u y > u z é feita através da circunferência a de centro no
2
2
2
ponto C e raio igual a AC . Como o ponto D pertence ao círculo delimitado por esta circunferência,
verifica-se a desigualdade.
[]
Para construir U considera-se a semi-circunferência c , de diâmetro
pontos
AD , passante pelos
A e D . Conduz-se a mediatriz do segmento [ AD ] que intersecta a semi-circunferência [c ]
2
2
2
no ponto E . Desta construção resulta que AE = ED = U , uma vez que AE + ED = AD .
Determinada a unidade U
coordenados x e
podem determinar-se as inclinações
ε
e
κ
dos eixos
u y (nos termos da figura). Os ângulos que u x e u y fazem
κ , respectivamente.
Após determinados os ângulos
6.5.
e
y . Para o efeito, considera-se uma semi-circunferência qualquer de diâmetro U .
Nesta inscrevem-se os segmentos u x e
com U são
ε
ε
e
κ , a determinação do referencial é feita como em 6.2.
Dados dois vértices do triângulo fundamental e os eixos axonométricos
Sejam dados os vértices do triângulo fundamental, X e Y , e os eixos axonométricos x ' , y '
e
z ' concorrentes no ponto O ' (projecção da origem, O , do referencial tri-ortogonal) (fig. 22).
tY
tX
O'
B
z'
A
Y
X
MXY
y'
[c ]
x'
Fig. 22
t
80
Considere-se uma superfície esférica
[α ] de diâmetro
XY e centro no ponto M XY (ponto
[ ]
a circunferência [cα ] .
médio do segmento XY . Esta superfície esférica contém o ponto O e intersecta o quadro segundo
O eixo coordendado z passa pelo ponto O , é ortogonal à recta tα (traço do plano
coordenado
num ponto
α
no quadro), é tangente à superfície esférica
[α ], e intersecta o eixo axonométrico
z'
Z.
[ ]
Considerem-se as rectas, tY e t X , tangentes à circunferência cα
respectivamente. Estas rectas intersectam o eixo axonométrico
nos pontos
X e Y,
z ' nos pontos A e B ,
respectivamente.
Como o eixo coordenado
z é ortogonal ao traço tα , a sua projecção ortogonal no quadro é
perpendicular ao traço tα .
Sendo o eixo coordenado z tangente à superfície esférica
[α ], a sua projecção ortogonal no
quadro está compreendida entre as rectas tY e t X . Logo o vértice Z do triângulo fundamental está
compreendido entre os pontos A e B .
Não sendo impostas mais condições, existe uma infinidade de posições possíveis que o eixo
coordenado
z pode ocupar.
As posições possíveis que o eixo coordenado
tangentes à superfície esférica
pontos
z pode ocupar correspondem às rectas
[α ] conduzidas pelos pontos da recta
z ' (compreendidos entre os
A e B ) e contidas em planos perpendiculares à recta tα (exceptuam-se as rectas tY e t X ).
Os pontos de tangência obtidos correspondem às posições possíveis para a origem do
referencial.
Concluindo, dados os eixos axonométricos e arbitrando os traços de dois eixos
coordenadados existe uma infinidade de referenciais tri-ortogonais que podem ser considerados como
tendo aquela projecção. Para limitar esta questão a um número finito de referenciais, outras condições
têm de ser impostas.
81
6.5.1. Dados dois vértices do triângulo fundamental, X e Y, os eixos
axonométricos, a projecção de um segmento unitário ux e a unidade U
Sejam dados os vértices do triângulo fundamental, X e Y , os eixos axonométricos x ' ,
y' e
z ' concorrentes no ponto O ' (projecção da origem, O , do referencial tri-ortogonal), a projecção de
um segmento unitário u x e a unidade U (fig. 23).
z'
Z
Or
O'
ux
t
Y
M XY
X
y'
x'
[c ]
Or
[x]
Fig. 23
Considere-se uma superfície esférica
[α ] de diâmetro
XY e centro no ponto M XY (ponto
[ ]
a circunferência [cα ] .
médio do segmento XY ). Esta superfície esférica contém o ponto O e intersecta o quadro segundo
Por outro lado, a origem O do referencial tri-ortogonal está contida na superfície esférica de
[]
raio U e centro X . Esta superfície intersecta o quadro segundo a circunferência x .
A origem, O , pertence à intersecção das duas superfícies esféricas.
Estas duas superfíces esféricas intersectam-se segundo uma circunferência cuja projecção
[
]
ortogonal no quadro coincide com o segmento Orα Orα ' . Como este segmento é perpendicular ao
traço tα , está contido na projecção ortogonal do eixo coordenado
[
z no quadro. Como tal, na
]
intersecção do prolongamento de Orα Orα ' com o eixo axonométrico z ' tem-se o ponto Z , isto é, o
vértice do triângulo fundamental que se procurava.
Tendo os três vértices do triângulo fundamental, a questão reduz-se à enunciada em 6.1.
82
6.5.2. Dados dois vértices do triângulo fundamental, X e Y, os eixos
coordenados, a projecção de um segmento unitário uz e a unidade U
Sejam dados os vértices do triângulo fundamental,
X e Y , os eixos axonométricos x' , y ' e
z ' , a projecção de um segmento unitário u z e a unidade U (fig. 24). O ponto O ' comum aos três
eixos axonométricos é a projecção, no quadro, da origem, O , do referencial tri-ortogonal.
z 1'' =m i
3
B
M X2Y2 i
X 2i
uZ
Z1
D
z'
Di
1
A
2
X1i
1
Y1
M X1Y1
Y1i
M X1Y1 i
e
X1
M1=M1i
S=S i
Y
t
X
Xi
M XY i
[h]i
[z1]
O' i
O'
t
4
M XY
y'
m
x'i
x'
Fig. 24
Aparentemente semelhante à questão anterior, esta é de resolução mais complexa.
Conhecendo os pontos
X e Y , isto é, a recta tα (traço do plano coordenado α no quadro),
é igualmente conhecida a direcção da projecção ortogonal do eixo coordenado z no quadro. Isto é,
z ' ' (não representado na figura) é perpendicular à recta tα .
Considere-se uma translacção do referencial tri-ortogonal de modo que o vértice
Z do
triângulo fundamental (não dado) coincida com o extremo Z 1 (oposto ao ponto O ' ) do segmento u z .
83
[π ] de raio U . Esta superfície
esférica contém o ponto O1 e intersecta o quadro segundo a circunferência [z1 ] .
Com centro no ponto Z 1 , considera-se uma superfície esférica
Nesta translacção o plano
α
passa à posição
α1 ;
a origem do referencial, O , passa à
posição O1 ; os eixos coordenados x , y e z passam às posições x1 , y1 e z1 , respectivamente; os
planos coordenados
β1
e
δ1
α, β
e
δ
passam às posições
α 1 , β1
e
δ 1 , respectivamente. Os planos α 1 ,
intersectam o quadro segundo as rectas tα 1 , t β 1 e tδ 1 , respectivamente paralelas aos traços
tα , t β e t δ .
O paralelismo mantém-se.
Considerada a translacção pode identificar-se a projecção ortogonal do eixo z1 no quadro,
isto é, a recta z1 ' ' . A recta z1 ' ' passa pelo ponto Z1 e é perpendicular ao traço tα .
[π ] e ao eixo z1 , conclui-se que deverá
pertencer à circunferência [c ] (contida na superfície esférica [π ] ), cuja projecção ortogonal no quadro
coincide com o segmento [ AB ] (passante pelo ponto Z1 ).
Daqui resulta que o plano α 1 deve ser tangente à superfíce esférica [π ] num ponto da
circunferência [c ] .
Como a origem O1 pertence à superfície esférica
Para determinar o plano
α1
devem determinar-se os pontos X 1 e Y1 (traços dos eixos x1 e
y1 no quadro) de tal modo que as distâncias do ponto M X 1Y1 (ponto médio do segmento [ X 1Y1 ] ) aos
pontos X 1 e Y1 sejam iguais à distância do ponto M X1Y1 ao ponto de tangência do plano
[π ] . Isto é, de tal modo que uma circunferência [c1 ] de diâmetro
passe pelo ponto comum ao plano α 1 e à circunferência [c ] .
superfície esférica
M X1Y1
α1
com a
X 1Y1 e centro
Para quaisquer pontos X 1 e Y1 pertencentes aos eixos axonométricos x' e
y ' , o lugar
geométrico dos pontos M X1Y1 é a recta m passante pelos pontos O ' e M XY (ponto médio do
[ ]
segmento XY ).
A recta m intersecta a recta z1 ' ' no ponto M 1 ≡ M 1i .
84
Pelo ponto M 1 ≡ M 1i conduza-se a recta e perpendicular à recta z1 ' ' .
A recta e intersecta o eixo axonométrico x ' no ponto S ≡ S i .
Considere-se a recta e como eixo de uma afinidade de direcção e .
Os pontos que pertencem à recta e são pontos duplos.
Esta afinidade transforma o ponto O ' no ponto O 'i , a recta m na recta mi ≡ z1 ' ' e o eixo
axonométrico x' na recta x'i .
[
]
Para qualquer ponto M X 1Y1 (ponto médio de um segmento X 1Y1 ) considerado na recta m ,
[π ] ) é a
hipotenusa de um triângulo rectângulo cujos catetos são os segmentos [M X Y M X Y i ] e [M X Y i O1 ] .
a sua distância ao ponto O1 (ponto de tangência do plano
α1
com a superfície esférica
1 1
1 1
1 1
Marcado o valor desta hipotenusa sobre a recta tα 1 a partir de M X1Y1i (nos dois sentidos), o
[]
lugar geométrico dos pontos X 1i e Y1i (extremos dos segmentos marcados) é a hipérbole h i , de
centro Di , passante pelos pontos 1 , 2 , 3 e 4 (facto geométrico F2).
[ ]i
Pode determinar-se o ponto X 1i na intersecção da hipérbole h
com a recta x'i .
A recta perpendicular a mi ≡ z1 ' ' passante pelo ponto X 1i é a recta tα 1 .
Na interseccção da recta tα 1 com o eixo axonométrico x ' tem-se o ponto X 1 afim do ponto
X 1i .
Na interseccção da recta tα 1 com o eixo axonométrico
y ' tem-se o ponto Y1 .
[]
[]
Com efeito, a hipérbole h i , de centro no ponto Di , é afim de uma hipérbole h , de centro
no ponto Di afim do ponto
D.
[ ]i
Note-se que, se o ponto de intersecção da recta x'i com a hipérbole h
[ ]i
de h
pertencer à porção
que está a traço-interrompido (na figura), a esse ponto não corresponde nenhuma solução. É
o caso do ponto X 2i . Neste caso a recta tα 2 , intersecta a circunferência
possível haver um plano
O triângulo
α2
tangente à superfície esférica
[X 1 , Y1 , Z1 ]
pelo que não é
[π ] .
é homotético do triângulo fundamental
determinação deste último é directa.
[z1 ] ,
[X , Y , Z ] ,
pelo que a
85
Determinados os pontos X , Y e Z , a questão reduz-se à enunciada em 6.1.
6.6.
Dados um vértice do triângulo fundamental, os eixos axonométricos e a
direcção de projecção
Sejam dados o vértice Y do triângulo fundamental, os eixos axonométricos x ' , y ' e z '
concorrentes no ponto O ' (projecção da origem, O , do referencial tri-ortogonal), e a direcção d1 de
projecção (dada pela sua projecção ortogonal no quadro d1 ' ' e pelo ângulo
λ
de inclinação com o
quadro; note-se que deste modo há duas direcções possíveis, pelo que se considera que os pontos
representados de d1r - correspondendo d1r ao rebatimento do plano definido por d1 e d1 ' ' correspondem a pontos de d1 que estão “para cá” do quadro) (fig. 25).
X
z'
O'
t
t
r
3=3 r
r
d''//d 1''
2=2 r
y'
C
ir
dr //d1r
d 1''
O1''ra
D
I
t ''r
d 1r
Or
Y=Yr
t '' r
W
X1''r
Z
x'
O1''r
D
x1''r
1=1r
t ''r
[c]
Z1''r
z 1''r
Fig. 25
Conduza-se pelo ponto Y um plano
π
perpendicular à recta d1 . Este plano intersecta o
quadro segundo a recta t .
A recta t é perpendicular à recta d1 ' ' .
A recta t intersecta os eixos axonométricos x ' ,
respectivamente.
y ' e z ' nos pontos 1 , Y e 2 ,
86
No plano
π
é produzida uma projecção ortogonal do referencial tri-ortogonal. O resultado
desta projecção corresponde aos eixos x1 ' ' , y1 ' ' e z1 ' ' concorrentes no ponto O1 ' ' (projecção da
origem, O , do referencial tri-ortogonal no plano
π ).
Estes eixos axonométricos são afins dos eixos axonométricos dados. O eixo da afinidade é a
recta
t e a direcção da afinidade é a da recta d1 . O triângulo fundamental da axonometria produzida
no plano
π
[
]
é afim do triângulo fundamental da axonometria, X , Y , Z , produzida no quadro.
Os eixos coordenados x ,
y e z intersectam o plano π nos pontos X 1 ' ' , Y e Z1 ' ' ,
respectivamente.
Os planos coordenados
α, β
e
δ
intersectam o plano
π
segundo as rectas tα ' ' ,
tβ '' e
tδ ' ' , respectivamente. A recta tα ' ' ≡ X 1 ' '.Y , a recta t β ' ' ≡ X 1 ' '.Z1 ' ' e a recta tδ ' ' ≡ Y .Z1 ' ' .
No plano
π,
eixos x1 ' ' , y1 ' ' e z1 ' ' são perpendiculares às rectas tδ ' ' , t β ' ' e tα ' ' ,
respectivamente, e passam pelos pontos 1 ,
Y e 2 , respectivamente.
Para determinar o triângulo fundamental
[X 1 ' ' , Y , Z1 ' '] no plano
π
procede-se à seguinte
construção no espaço:
Pelo ponto O ' conduz-se uma recta d com a direcção de projecção.
A intersecção da recta d com o plano
π
corresponde ao ponto O1 ' ' , ortocentro do triângulo
[X 1 ' ' , Y , Z1 ' '].
[
]
É de notar que se o ponto O1 ' ' for exterior ao triângulo X 1 ' ' , Y , Z 1 ' ' , a direcção de projecção
dada não pode ser admitida.
Pelos pontos 1 e 2 conduzem-se as rectas x1 ' ' e z1 ' ' , respectivamente.
Pelo ponto
Y conduzem-se as rectas tδ ' ' e tα ' ' perpendiculares a x1 ' ' e a z1 ' ' ,
respectivamente.
A recta tδ ' ' intersecta a recta z1 ' ' no ponto Z 1 ' ' .
A recta tα ' ' intersecta a recta x1 ' ' no ponto X 1 ' ' .
Pelos pontos Z 1 ' ' e X 1 ' ' passa a recta t β ' ' que intersecta a recta t no ponto 3 .
87
A determinação gráfica destes pontos pressupõe o rebatimento do plano
torno da recta
π
para o quadro em
t . Determinando o ponto O1 ' ' r (ponto O1 ' ' rebatido para o quadro) e notando que
1 ≡ 1r , 2 ≡ 2 r e Y ≡ Yr , a construção no quadro segue-se pela ordem indicada.
Para determinar o ponto O1 ' ' r , considera-se um rebatimento auxiliar do plano d .d ' ' para o
quadro em torno da recta d ' ' .
O plano d .d ' ' intersecta o plano
π
segundo uma recta
i perpendicular à recta d . A recta i
intersecta a recta t no ponto I .
No rebatimento do plano d .d ' ' tem-se O ' ≡ O ' r e I ≡ I r .
Por O ' ≡ O ' r passa a recta d r (recta d rebatida) que faz
λº
com d ' ' .
Por I ≡ I r passa a recta ira (recta i rebatida) perpendicular à recta d r .
As rectas d r e ira intersectam-se no ponto O1 ' ' ra (ponto O1 ' ' rebatido para o quadro em
torno da charneira d ' ' ).
Com centro no ponto I ≡ I r e raio igual a IO1 ' ' rα descreve-se um arco de circunferência
que intersecta a recta d ' ' ≡ ir (sendo ir o rebatimento da recta
i para o quadro, em torno da
charneira t ) no ponto O1 ' ' r (note-se que há duas posições possíveis para este ponto consoante o
sentido do rebatimento).
Construído o triângulo
[X 1 ' 'r , Y , Z1 ' 'r ]
(triângulo
torno da charneira t ), é possível determinar a distância,
ao plano
[X 1 ' ' , Y , Z1 ' '] rebatido para o quadro em
D , da origem, O , do referencial tri-ortogonal
π , por meio da circunferência [c ] , de diâmetro Z1 ' 'r W
, passante pelos pontos Z 1 ' ' r e W
(esta construção faz-se como em 6.1.).
Marque-se a distância D , a partir do ponto O1 ' ' ra , sobre a recta d r (considera-se a
marcação apenas para um dos lados) de modo a obter o ponto Ora (rebatimento do ponto O para o
quadro em torno da charneira d ' ' ).
Pelo ponto Ora conduz-se uma recta perpendicular à recta d ' ' que a intersecta no ponto C ,
[
]
ortocentro do triângulo fundamental X , Y , Z . Note-se que Orα C corresponde à distância da origem,
O , ao quadro.
88
Pelo ponto C conduz-se a recta Y.C .
t β (traço do plano coordenado β no quadro) perpendicular
Pelo ponto 3 conduz-se a recta
à recta Y.C .
t β intersecta os eixos axonométricos x' e z ' nos pontos X e Z , respectivamente.
A recta
Conhecendo os vértices do triângulo fundamental
X , Y e Z e a distância da origem, O ,
do referencial tri-ortogonal ao quadro, fica determinado o referencial.
6.7.
Dados um vértice do triângulo fundamental, a direcção do eixo
coordenado correspondente e os eixos axonométricos
Sejam dados o vértice Z do triângulo fundamental, os eixos axonométricos x ' ,
y' e z'
concorrentes no ponto O' (projecção da origem, O , do referencial tri-ortogonal) e a posição do eixo
coordenado z (dada pela sua projecção ortogonal no quadro, z ' ' , e pelo ângulo
o quadro; z r é o rebatimento do eixo coordenado
ϕ
de inclinação com
z em torno da charneira z ' ' ; neste caso,
considera-se a origem O do referencial tri-ortogonal “para cá” do quadro). Note-se que, dar o ponto
Z e a direcção do eixo z , equivale a dar a posição de z (fig. 26).
Z
z''
r
zr
z'
Pr
ir
Er
O'
P''
i''
Pra
Sr
E''
Or
g''
O''
S''
t
1
t
F=Fr
Y1
I1
Y
I
M X1Y1
X1
[c] r
y'
X
x'
j''
O 1''
Fig. 26
89
Sendo conhecida a posição do eixo coordenado z , é também conhecida a orientação do
α,
plano coordenado
donde resulta que a recta tα (traço do plano coordenado
α
no quadro) é
perpendicular à recta z ' ' .
A recta tα deverá ser determinada de tal modo que pelos pontos X e Y (traços dos eixos
coordenados x e
y no quadro, respectivamente) passe uma circunferência [c ] (não representada na
figura), contida no plano coordenado
do eixo coordenado
α , que intersecte o eixo coordenado z . O ponto de intersecção
z com a circunferência [c ] será a origem, O , do referencial tri-ortogonal.
Para quaisquer pontos
X 1 e Y1 pertencentes aos eixos axonométricos x' e y ' ,
[ ]
respectivamente, existe uma circunferência c1 de diâmetro X 1Y1 e centro no ponto M X 1Y1 (ponto
médio do segmento
[X 1Y1 ] )
orientada segundo o plano
[ ]
circunferências c1 é uma superfíce cónica
α.
O lugar geométrico de todas as
[π ] de vértice no ponto O' .
Os pontos de intersecção do eixo coordenado z com a superfície cónica
[π ] correspondem
às posições possíveis que a origem do referencial, O , pode ocupar.
Para os determinar, conduz-se um plano auxiliar pelo eixo coordenado
conveniente considerar o plano que contém eixo coordenado
z (neste caso é
z ' , designado doravante por plano
z.z ' ).
O plano z.z ' intersecta a superfície cónica
As geratrizes
[π ] segundo duas geratrizes
g e j.
g e j intersectam o eixo coordenado z nos pontos O e O1 (posições
possíveis para a origem do referencial tri-ortogonal).
Para a determinação gráfica procede-se do seguinte modo:
Conduz-se um plano
O plano
α1
α1
qualquer com a orientação
α.
intersecta o quadro segundo a recta tα 1 perpendicular à recta z ' ' .
A recta tα 1 intersecta os eixos axonométricos x' e
y ' nos pontos X 1 e Y1 , respectivamente.
[ ]
Pelos pontos X 1 e Y1 passa a circunferência c1 contida no plano
[ ]r
está representada pela circunferência c1
charneira tα 1 ).
[ ]
α1 . Esta circunferência
(circunferência c1 rebatida para o quadro em torno da
90
O plano definido pelas rectas z ' ' e
z intersecta o plano α 1 segundo uma recta a .
A recta a vem representada pela sua projecção ortogonal no quadro, a ' ' ≡ z ' ' , e pelo seu
rebatimento para o quadro, a ra , em torno da charneira z ' ' . A recta a ra é perpendicular à recta z r
porque o plano
α1
é perpendicular ao eixo coordenado
z.
A recta a intersecta as rectas z ' ' e tα 1 no ponto I ≡ I r .
O ponto comum às rectas a e z é o ponto P (dado pelo seu rebatimento para o quadro,
Pra , em torno da recta z ' ' , o que permite determinar a sua projecção ortogonal no quadro, P' ' ).
O plano z.z ' intersecta o plano
α1
segundo uma recta i .
A recta i passa pelo ponto F ≡ Fr (ponto de intersecção do eixo axonométrico z ' com a
recta tα 1 ; no rebatimento do plano
α1
para o quadro, este ponto é fixo) e pelo ponto
P.
A recta ir (recta i rebatida para o quadro em torno da charneira tα 1 ) passa pelo ponto
F ≡ Fr e pelo ponto Pr (ponto P rebatido para o quadro em torno da charneira tα 1 ; note-se que há
duas posições possíveis para este ponto consoante o sentido do rebatimento).
A projecção ortogonal da recta i no quadro, i ' ' , passa pelos pontos F ≡ Fr e
P' ' .
[ ]
A recta i intersecta a circunferência c1 nos pontos E e S .
Pelos pontos E e S passam as geratrizes g e j resultantes da intersecção do plano z.z '
com a superfície cónica
[π ] .
[ ]r
A recta ir intersecta a circunferência c1
nos pontos E r e S r (pontos
E e S rebatidos
para o quadro em torno da charneira tα 1 ).
A partir dos pontos E r e S r podem determinar-se os pontos E ' ' e S ' ' sobre a recta i ' ' .
Pelo ponto O' e pelos pontos E ' ' e S ' ' passam as rectas
g ' ' e j ' ' , respectivamente.
As rectas g ' ' e j ' ' intersectam a recta z ' ' nos pontos O ' ' e O1 ' ' (projecções verticais dos
pontos O e O1 ; apenas considera o ponto O ).
Pelo ponto O ' ' conduz-se uma recta paralela à recta P ' '.Pra .
Esta recta intersecta a recta z r no ponto Or (ponto O rebatido para o quadro em torno da
charneira z ' ' ). A distância Or O ' ' é a distância da origem do referencial ao quadro, e o ponto O ' ' é o
ortocentro do triângulo fundamental.
91
Pelo ponto Or conduz-se uma recta bra paralela à recta a ra .
Esta recta intersecta a recta z ' ' no ponto I .
Pelo ponto
I passa a recta tα (traço do plano coordenado α no quadro) paralela à recta
tα 1 .
y ' nos pontos X e Y , respectivamente.
A recta tα intersecta os eixos axonométricos x' e
Determinados os pontos X , Y , Z e O , o referencial fica definido.
6.8.
Dados um vértice do triângulo fundamental, a direcção de um eixo
coordenado
não
correspondente
ao
vértice
dado,
e
os
eixos
Seja dado o vértice Y do triângulo fundamental, os eixos axonométricos x' ,
y' e z'
axonométricos
concorrentes no ponto O ' (projecção da origem, O , do referencial tri-ortogonal), e a direcção do eixo
coordenado
z (dada pela
coordenado
z , z1 ' ' , e pelo ângulo ϕ de inclinação com o quadro; z1r é o rebatimento da recta z1
projecção ortogonal no quadro de uma recta z1 paralela ao eixo
para o quadro em torno da charneira z1 ' ' ; neste caso consideraremos a origem O do referencial triortogonal “para cá” do quadro) (fig. 27).
z'
P'
Z
[e]'
Z1
O'
z2''
r
z2r
z 1r
z 1''
Pr
i1r
i 2r
t
Y
X
I
M XY
x'
y'
[c ]
Fig. 27
Sendo dada a direcção do eixo coordenado
coordenado
α.
z , é conhecida a orientação do plano
Como tal, pode conduzir-se pelo ponto dado, Y , a recta tα (traço do plano
92
coordenado
α
no quadro) perpendicular à recta z1 ' ' . A recta tα intersecta o eixo axonométrico x ' no
ponto X .
Pelos pontos X e Y passa uma superfície esférica
[α ] de diâmetro
XY e centro no ponto
M XY (ponto médio do segmento [XY ] ).
A superfície esférica
[cα ] de diâmetro
[α ] contém o ponto
O e intersecta o quadro segundo a circunferência
XY passante pelos pontos X e Y .
O plano coordenado
α
intersecta a superfície esférica
[α ] segundo uma circunferência [e]
(não representada na figura).
[]
O ponto O pertence à circunferência e .
[]
A projecção da circunferência e , no quadro, segundo a direcção do eixo coordenado
z
[]
corresponde a uma elipse e ' que intersecta o eixo axonométrico z ' no vértice Z do triângulo
fundamental.
Para determinar o ponto
O plano coordenado
α
Z procede-se do seguinte modo:
intersecta o plano definido pelas rectas z1 e z1 ' ' (doravante
designado plano z1 .z1 ' ' ) segundo uma recta i1 perpendicular à recta z1 .
Conduza-se pelo ponto M XY um plano paralelo ao plano z1 .z1 ' ' , designado por plano z 2 .z 2 ' '
(sendo z 2 e z 2 ' ' rectas paralelas às rectas z1 e z1 ' ' , respectivamente).
O plano z 2 .z 2 ' ' intersecta o plano coordenado
α
segundo uma recta i2 paralela à recta i1 .
A recta i2 passa pelo ponto M XY e intersecta a superfície esférica
[]
[α ] num ponto
P da
[]
circunferência e . Note-se que a recta tangente à circunferência e , no ponto P , é paralela à recta
tα e perpendicular à recta i2 . Daqui resulta que a projecção do ponto P no quadro, isto é, P' ,
segundo a direcção do eixo coordenado
z , é um extremo do eixo maior da elipse [e]' , donde o
[ ]
segmento XY é o seu eixo menor.
Para a determinação gráfica:
Conduz-se pelo ponto M XY uma recta i2 r (recta i2 rebatida para o quadro em torno da recta
z 2 ' ' ).
93
[ ]
A recta i2 r intersecta a circunferência cα no ponto Pr (ponto
P rebatido para o quadro em
torno da recta z 2 ' ' ).
Pelo ponto Pr conduz-se a recta z 2 r (recta z 2 rebatida para o quadro em torno da recta
z 2 ' ' ).
A recta z 2 r intersecta a recta z 2 ' ' no ponto
P' .
[]
Determinado o ponto P ' pode conduzir-se a elipse e ' .
[]
A elipse e ' intersecta o eixo axonométrico z ' nos pontos Z e Z 1 .
Os pontos Z e Z 1 são os pontos possíveis para a intersecção do eixo coordenado z com o
quadro (apenas é considerado o ponto Z ).
X , Y e Z esta questão reduz-se à enunciada em 6.1.
Determinados os pontos
6.9.
Dados um vértice do triângulo fundamental, os eixos axonométricos, as
projecções de dois segmentos unitários, e a unidade U
Sejam dados um vértice do triângulo fundamental,
Y , os eixos axonométricos x' , y ' e z '
concorrentes no ponto O ' (projecção da origem, O , do referencial tri-ortogonal), as projecções de
dois segmentos unitários, u x e
resolução, considera-se o ponto
u y , e a unidade U (fig. 28). Para efeitos de simplificação da
Y no extremo do segmento u y . Contudo é de notar que, sendo dado
o ponto Y não coincidente com o extremo de u y , a resolução é em tudo similar.
z'
[u]
D
[c]'
O'
A
B
ux
uy
X
Y
t
C
x'
y'
Fig. 28
Os segmentos u x e u y são projecções de dois segmentos unitários U que fazem 90º entre
si no ponto O . Pelos extremos dos segmentos unitários u x e
u y passa uma circunferência [c ] de
94
centro O
α.
contida no plano coordenado
Os segmentos unitários U
são semidiâmetros
[]
conjugados da circunferência c .
[]
[]
Os segmentos u x e u y são semi-diâmetros conjugados de uma elipse c ' . A elipse c '
[]
pode ser considerada como projecção cilíndrica da circunferência c desde que a medida de U
[]
esteja compreendida entre as medidas dos eixos menor e maior da elipse c ' (facto geométrico F3).
[]
Com centro no ponto O ' considere-se a circunferência u de raio U contida no quadro.
[]
[]
Como a circunferência u intersecta a elipse c ' nos pontos A , B , C e D , os diâmetros
[AB] e [CD ] podem ser considerados (de dois modos diferentes) como projecção do diâmetro de
[c] paralelo ao quadro (para desenvolvimento da questão considera-se apenas o segmento [AB]).
A direcção do diâmetro [ AB ] é, portanto, a direcção da recta tα (traço do plano coordenado
α
no quadro).
Pelo ponto
Y conduz-se a recta tα , com a direcção de [ AB ], determinando o ponto X no
eixo axonométrico x ' .
Neste momento a questão reduz-se à enunciada em 6.5.1.
A questão não sofre alterações significativas se for dado o ponto
Z em alternativa ao ponto
Y . Pode sempre considerar-se um ponto Y1 no extremo do segmento u y , o que permite determinar
um ponto X 1 no eixo axonométrico x ' . O triângulo
[
[X 1 ,Y1 , Z1 ]
que se obtém deste modo é
]
homotético do triângulo fundamental X , Y , Z .
6.10. Dados um vértice do triângulo fundamental, os eixos axonométricos, e
as projecções de três segmentos unitários ux, uy e uz (teorema de PohlkeSchwarz)
Sejam dados um vértice do triângulo fundamental, Y , os eixos axonométricos, x ' ,
y' e z ' ,
concorrentes no ponto O ' (projecção da origem, O , do referencial tri-ortogonal), e as projecções de
três segmentos unitários, u x , u y e u z (fig. 29).
95
z'
[e]'
N
[u]
m
uz
O'
B
ux
Di
Bi
uy
A
x'
d
u xi
n
[c]'i
Y
M
y'
D
e
O' i
u yi
u zi
U1r
Ci
1
Ai
Ti
Fig. 29
À semelhança da situação anterior, cada par de segmentos pode ser considerado como semidiâmetros conjugados de elipses que são projecção de circunferências de raio U . Cada uma das
circunferências está contida num plano coordenado e todas têm centro na origem do referencial O .
As três circunferências estão contidas numa superfície esférica
[π ] de centro O e raio U .
[]
A questão resume-se a determinar a elipse e ' de centro no ponto O ' que resulta da
[π ] e que é tangente às três elipses referidas anteriormente.
O eixo menor desta elipse corresponderá à unidade U , isto é, ao raio da esfera [π ] (facto
projecção da superfície esférica
geométrico F4).
[]
Para determinar a elipse e ' procede-se, por exemplo, do seguinte modo:
Conduz-se pelo extremo do segmento u x , oposto ao ponto O ' , uma recta e paralela ao eixo
axonométrico
y' .
[]
A recta e vai ser tomada como eixo de uma afinidade que transforma a elipse c ' (não
representada na figura) de semi-diâmetros conjugados u x e
u y na circunferência [c ]'i , de semi-
96
diâmetros conjugados u xi e
u yi , nos termos da figura 29. A direcção da afinidade é dada pela recta
d que passa pelos pontos O' e O 'i .
Nesta transformação geométrica, os segmentos u x ,
u y e u z são tranformados nos
segmentos u xi , u yi e u zi (de extremos O 'i e 1 ), respectivamente.
As elipses
conjugados
[a]'i ,
[b]' ,
de semi-diâmetros conjugados u x e u z , e
[a ]' ,
de semi-diâmetros
u y e u z , são tranformadas nas elipses [b]'i de semi-diâmetros conjugados u xi e u zi , e
de semi-diâmetros conjugados u yi e u zi , respectivamente (nenhuma destas elipses está
representada na figura).
[]
[]
A elipse e ' é transformada na elipse e 'i .
[]
Independentemente da afinidade, também a elipse e 'i pode ser considerada como projecção
[π 1 ] , de raio U 1 e centro num ponto O1 .
As elipses [a ]'i , [b ]'i e a circunferência [c ]'i podem ser consideradas como projecção de
três circunferências [a1 ] , [b1 ] , e [c1 ] contidas na superfície esférica [π 1 ] , todas com centro no ponto
de uma superfície esférica
O1 e contidas em planos perpendiculares entre si.
[]
[ ]
Como c 'i é uma circunferência, pode considerar-se a circunferência c1 contida num plano
paralelo ao quadro.
Neste caso, U 1 é igual aos comprimentos de u xi e
u yi , uma vez que estes são semi-
[]
diâmetros conjugados da circunferência c 'i .
Daqui resulta que u zi pode ser considerado como projecção de um segmento U 1
perpendicular ao quadro.
A direcção da projecção da superfíce esférica
[π 1 ]
[]
segundo a elipse e 'i tem projecção
ortogonal no quadro com a direcção de u zi .
[]
[
]
O eixo menor da elipse e 'i é o segmento Ai Bi , passante pelo ponto O 'i , e perpendicular
[]
ao segmento u zi . Os pontos Ai e Bi pertencem à circunferência c 'i .
Os extremos do eixo maior situam-se, obviamente, no prolongamento da recta que contém o
segmento u zi . Rebatendo o plano perpendicular ao quadro que passa por u zi , pode identificar-se o
[π 1 ] no quadro. Este plano intersecta a superfície esférica [π 1 ] segundo
uma circunferência cujo rebatimento pode ser considerado coincidente com [c ]'i . Conduzindo uma
ângulo
π
da projecção de
97
[]
recta tangente à circunferência c 'i , com a direcção de Ai .1 , determina-se o ponto Ci . O ponto Ci
[]
é um dos extremos do eixo maior da elipse e 'i (não representada no desenho). O outro extremo do
eixo maior é o ponto Di .
[
]
[
]
[]
Voltando a considerar a afinidade, os eixos maior, C i Di , e menor, Ai Bi , da elipse e 'i
[]
são afins de dois diâmetros conjugados da elipse e ' .
[ ]
[π ] .
O eixo-maior desta elipse, [MN ] , corresponde à direcção da projecção ortogonal no quadro
da direcção de projecção da superfície esférica [π ] .
O eixo-menor desta elipse , mn , corresponde ao diâmetro da superfície esférica
Neste momento a questão reduz-se à enunciada em 6.9.
Este resultado é equivalente ao enunciado de um teorema fundamental da axonometria que
se passa a citar:
Teorema de Pohlke-Schwarz:
Três segmentos ux, uy e uz com um extremo comum, e tais que não estejam os três alinhados, mas
sem excluir que dois estejam alinhados ou sejam coincidentes, podem sempre considerar-se, em
geral de quatro modos diferentes, como projecção de três segmentos unitários, iguais,
perpendiculares entre si e com um extremo em comum, a posição dos quais é determinada por meio
de uma translacção arbitrária na direcção de projecção.10
Com efeito, existem duas direcções de projecção, simétricas relativamente ao quadro. Para
cada direcção de projecção existem duas orientações de referencial possíveis, simétricas
relativamente à orientação ortogonal à direcção de projecção.
10
Tradução adaptada do enunciado do Teorema de Pohlke presente em FONDAMENTI GEOMETRICI DELLA
RAPPRESENTAZIONE PROGETTUALE E TECNICA DELL’ ARCHITETTURA, p. 72 (vidé bibliografia).
98
7.
Representação axonométrica das figuras geométricas elementares,
ponto, recta e plano, através dos rebatimentos dos planos coordenados
Neste capítulo consideram-se as designações atrás adoptadas, pelo que aqui não serão
especificadas.
Em todo o caso, antes de passar às questões da representação, é conveniente fazer algumas
considerações no que concerne à disposição do referencial, bem como a algumas convenções e
simplificação de notação.
Neste trabalho, sempre que se representar em axonometria, consideram-se:
a) a origem do referencial “para lá” do quadro;
b) os vértices do triângulo fundamental como estando contidos nos semi-eixos coordenados
positivos;
c) a recta tα paralela à margem inferior da folha de desenho;
d) o ponto Y à esquerda do pontos X e Z , e acima da recta tα ;
e) o sentido positivo dos eixos axonométricos notado por uma seta no limite dos segmentos
que os representam;
f) a designação dos eixos axonométricos apenas referida por x ,
y e z;
g) a designação da projecção da origem do referencial por O (e não por O ' , por uma questão
de simplificação de notação);
h) o plano coordenado
α
associado à orientação HORIZONTAL e o eixo coordenado
z
associado à direcção VERTICAL;
i) o semi-eixo coordenado y positivo fica à esquerda do semi-eixo coordenado x positivo
quando “observados” a partir de um ponto do semi-eixo coordenado z positivo;
j) um ponto
A ou uma recta a rebatidos para o quadro, pelo rebatimento de um plano π ,
notados por Arπ ou a rπ ;
k) a projecção ortogonal no plano coordenado
α
designada por PROJECÇÃO HORIZONTAL
β
designada por PROJECÇÃO VERTICAL e
e será notada por ‘ ;
l) a projecção ortogonal no plano coordenado
será notada por ‘’ ;
m) a projecção ortogonal no plano coordenado
será notada por ‘’’ .
δ
designada por PROJECÇÃO LATERAL e
99
É de notar que, em geral, se a axonometria for ortogonal, alguns traçados ficam mais
simplificados. Esses traçados podem ser deduzidos directamente dos traçados efectuados, pelo que
não serão aqui considerados.
[
]
Sejam dados um triângulo fundamental X , Y , Z e os eixos axonométricos.
7.1.
O Ponto
• Um ponto qualquer fica definido pelas distâncias aos planos coordenados. Estas distâncias
designam-se por COORDENADAS DO PONTO e podem ser POSITIVAS ou NEGATIVAS consoante
os sentidos dos eixos coordenados.
As coordenadas de um ponto são dadas por um conjunto de três números reais colocados
entre parêntesis e separados por vírgula.
O primeiro valor corresponde à distância do ponto ao plano coordenado
δ
e designa-se por
COORDENADA X do ponto, ou ABCISSA.
Analogamente, têm-se a COORDENADA Y, ou AFASTAMENTO, e a COORDENADA Z, ou
COTA.
Genericamente, as coordenadas de um ponto
P vêm dadas por ( X P , YP , Z P ) em índice, isto
é, P( X P ,YP , Z P )
• Para representar um ponto P( X P ,YP , Z P ) recorre-se aos rebatimentos dos planos coordenados
(fig. 30).
z
t =t
r
Or
ZP r
zr
Z=Z r
qr
t
2=2 r
ZP
MYZ
q
P'''
O
C
M ZX
[c ]
P''
XP
yr
P
p
xr
YP
t =t
P'
r
1=1r
Y=Yr
M XY
X=X =X r
x
pr
y
YP r
X Pr
[c ]
Or
Fig. 30
100
Para representar as coordenadas X P e YP recorre-se ao rebatimento do plano coordenado
α
para o quadro. Neste rebatimento, a origem do referencial descreve um arco de circunferência
contido num plano perpendicular à charneira tα , e, por conseguinte, perpendicular ao quadro. Este
plano intersecta o quadro segundo a recta p rα , perpendicular à recta tα , conduzida pelo ponto
Z
(esta recta contém o ponto C , ortocentro do triângulo fundamental, e intersecta a recta tα no ponto
1 ),
e
intersecta
o
plano
coordenado
α
segundo
a
recta
p
(perpendicular
ao traço tα ).
Logo, a recta p rα deverá conter o ponto Orα .
Por outro lado, os eixos coordenados x e
y são perpendiculares entre si na Origem do
referencial, pelo que as rectas xrα e y rα deverão ser perpendiculares no ponto Orα .
Como os pontos X e Y são pontos fixos do rebatimento, porque pertencem à charneira,
tem-se que X ≡ X rα e Y ≡ Yrα . Por estes pontos passam as rectas xrα e y rα .
[ ]
Portanto, o ponto Orα deverá estar contido na circunferência cα
de diâmetro XY e centro
no ponto M XY (apenas está representada uma semi-circunferência).
[ ] (note-se que há
O ponto Orα resulta da intersecção da recta p rα com a circunferência cα
duas posições possíveis para Orα consoante o sentido do rebatimento).
Tendo as rectas xrα e y rα , podem marcar-se sobre estas, as coordenadas X Pr α e YPr α ,
respectivamente. As projecções destas coordenadas deverão estar contidas nos eixos axonométricos
x e y . Para as obter conduzem-se pelos pontos X Pr α e YPr α rectas paralelas à recta p rα . Pelos
pontos de intersecção destas com a recta tα conduzem-se rectas paralelas à recta p . Na
intersecção destas com x e
y têm-se, respectivamente, X P e YP .
Para determinar Z P procede-se de forma análoga.
Pelo ponto X P conduz-se uma recta paralela ao eixo y . Pelo ponto YP conduz-se uma recta
paralela ao eixo x . Estas duas rectas intersectam-se no ponto
Analogamente obtêm-se P ' ' e P ' ' ' .
P' .
101
Pelo ponto
P' conduz-se uma recta paralela ao eixo z .
Pelo ponto
P' ' conduz-se uma recta paralela ao eixo y .
Pelo ponto P ' ' ' conduz-se uma recta paralela ao eixo x .
Estas rectas intersectam-se no ponto P .
[
O paralelepípedo O, YP , P ' , X P , P ' ' , Z P , P ' ' ' , P
]
designa-se por PARALELEPÍPEDO DAS
COORDENADAS DE P.
7.2.
A Recta
• Uma recta fica definida por dois pontos.
Sejam dados dois pontos
P e Q (fig, 31). Neste caso consideram-se apenas as suas
projecções horizontais.
Z
V=V''
Q
N
P
a
W'
2=2''
t
H=H'
W=W'''
Q'
O
V'=2'
i
t
N'
t
1=1'
Y
y
a'=i'
P'
X
x
Fig.31
Os pontos P e
e
Q definem a recta a . A sua projecção horizontal, a ' , passa pelos pontos P'
Q' .
Podem determinar-se os PONTOS NOTÁVEIS da recta a , isto é, os pontos de intersecção da
recta com os planos coordenados e com o quadro.
102
Designam-se por
coordenados
α, β
e
δ
H , V , W e N os pontos de intersecção da recta a com os planos
, e com o quadro, respectivamente.
H é o TRAÇO HORIZONTAL, V é o TRAÇO VERTICAL, W é o TRAÇO LATERAL e N é
o TRAÇO NATURAL.
Para determinar H , ponto de cota 0, é suficiente intersectar a recta a com a sua projecção
horizontal a ' .
Para determinar V , ponto de afastamento 0, intersecta-se a recta a ' com o eixo x
determinando o ponto V ' . Por V ' conduz-se uma recta paralela ao eixo z que intersecta a recta a
no ponto V .
Para determinar W , ponto de abcissa 0, intersecta-se a ' com o eixo y determinando o
ponto W ' . Por W ' conduz-se uma recta paralela ao eixo
Para determinar N , considera-se a recta
recta
z que intersecta a recta a no ponto W .
i , de intersecção do plano a.a ' com o quadro. A
i intersecta a recta a no ponto N .
• As rectas podem ser classificadas segundo as suas direcções relativamente aos eixos e
planos coordenados. Assim tem-se:
RECTAS DE FRENTE (rectas paralelas ao plano coordenado
RECTAS DE NÍVEL (rectas paralelas ao plano coordenado
α)
RECTAS DE PERFIL (rectas paralelas ao plano coordenado
RECTAS VERTICAIS (rectas paralelas ao eixo coordenado
β)
δ)
z)
RECTAS DE TOPO (rectas paralelas ao eixo coordenado y )
RECTAS FRONTO-HORIZONTAIS (rectas paralelas ao eixo coordenado x )
RECTAS OBLÍQUAS (rectas oblíquas aos três eixos e planos coordenados)
7.3.
O Plano
• Um plano fica definido por três pontos. Três pontos permitem definir rectas do plano.
Considere-se um plano
π
definido por duas rectas, a e b , concorrentes num ponto P (fig. 32).
103
Z
Z
v
t
n
2
a
w
P
Nb
O
b
t
Na
a'
b'
P'
X
Y
Y
1
t
X
h
x
y
Fig. 32
Pelos pontos notáveis das rectas a e b passam as RECTAS NOTÁVEIS do plano
as rectas de intersecção do plano
π
com os planos coordenados e com o quadro.
Designam-se por hπ , vπ , wπ e nπ os traços do plano
δ
π , isto é,
π
nos planos coordenados
α, β
e
, e no quadro, respectivamente.
hπ é o TRAÇO HORIZONTAL, vπ é o TRAÇO VERTICAL, wπ é o TRAÇO LATERAL e nπ é
o TRAÇO NATURAL.
O traço hπ , recta de cota 0, fica definida pelos traços horizontais de a e b .
O traço vπ , recta de afastamento 0, fica definida pelos traços verticais de a e b .
O traço wπ , recta de abcissa 0, fica definida pelos traços laterais de a e b .
O traço nπ , recta do quadro, passa pelos pontos 1 ,
2 e 3 . O ponto 1 resulta da intersecção
dos traços tα e hπ . O ponto 2 resulta da intersecção dos traços
t β e vπ . O ponto 3 (não
representado) resulta da intersecção dos traços tδ e wπ . A recta nπ passa pelos traços naturais das
rectas a e b , os pontos N a e N b , respectivamente.
104
• Os planos podem ser classificados segundo as suas orientações relativamente aos eixos e
planos coordenados. Assim tem-se:
PLANOS DE FRENTE (planos paralelos ao plano coordenado
PLANOS DE NÍVEL (planos paralelos ao plano coordenado
α)
PLANOS DE PERFIL (planos paralelos ao plano coordenado
PLANOS VERTICAIS (planos paralelos ao eixo coordenado
β)
δ)
z)
PLANOS DE TOPO (planos paralelos ao eixo coordenado y )
PLANOS DE RAMPA (planos paralelos ao eixo coordenado x )
PLANOS OBLÍQUOS (planos oblíquos aos três eixos e planos coordenados)
105
8.
Restituição das grandezas inerentes ao ponto, recta e plano, dadas as
suas representações
Embora se tenha feito a opção de separar as questões da representação e da restituição por
razões metodológicas, é facto que na restituição também se representa. Por isso é fácil perceber que
os traçados inerentes à restituição também servem para representar. Por exemplo, o rebatimento de
um plano permite a representação de uma figura nele contida pela operação inversa, isto é, pelo
contra-rebatimento.
À semelhança do capítulo anterior, se a axonometria for ortogonal, alguns traçados ficam mais
simplificados.
[
]
Sejam dados um triângulo fundamental X , Y , Z , e os eixos axonométricos.
8.1.
O Ponto
Seja dada a representação de um ponto
P (dada por P , P' , P' ' e P' ' ' ) (fig. 33)
z
Z
t
X1
5
1
4
ZP
Y1
P''
P'''
t
3
P
1
P1
t
X2
O
6
XP
Y2
t
YP
t
Pr
1
P'
Y
y
2
1
t
X
x
Z1
Fig. 33
• Determinar as coordenadas do ponto
P a partir da sua representação corresponde a
executar, pela ordem inversa, os traçados respeitantes à marcação do ponto dadas as suas
coordenadas. Nesse sentido pode seguir-se o exposto na figura 30, pelo que não se farão mais
considerações.
106
• Acrescenta-se a determinação da distância do ponto
Pelo ponto
e
δ
P ao quadro.
P conduzem-se os planos α 1 , β1 e δ 1 paralelos aos planos coordenados α , β
, respectivamente.
O plano
α1
intersecta o quadro segundo a recta tα 1 // tα (passante pelos pontos
O plano
β1
intersecta o quadro segundo a recta
O plano
δ1
intersecta o quadro segundo a recta tδ 1 // tδ (passante pelos pontos 1 e 6 ).
[
4 e 5 ).
t β 1 // t β (passante pelos pontos 2 e 3 ).
]
O ortocentro do triângulo X 1 , Y1 , Z 1 , isto é, o ponto P1 , é a projecção ortogonal do ponto P
no quadro.
Por exemplo, através do rebatimento, para o quadro, do plano perpendicular ao quadro
passante pelos pontos
P e X 1 (plano que contém a distância PP1 ) pode determinar-se a verdadeira
[
grandeza da distância de P ao quadro dada pelo segmento PPr
] (este traçado é, em tudo, similar
ao efectuado em 6.1.).
8.2.
A Recta
Seja dada a representação de uma recta a (dada por a e a ' ).
• Determinar as coordenadas de pontos da recta reduz-se ao que já foi enunciado
anteriormente.
Determinando, por exemplo, as coordenadas X
rebatimento do plano coordenado
e Y de dois pontos da recta, pelo
α , pode determinar-se o ângulo que a sua projecção horizontal faz
com os eixos coordenados x e y .
De forma análoga, podem determinar-se os ângulos da projecção vertical com os eixos
coordenados x e z , e da projecção lateral com os eixos coordenados y e z .
• Acrescenta-se a isto a determinação dos ângulos que medem as inclinações da recta
relativamente aos planos coordenados.
Isto remete-nos para a utilização do plano, pelo que será tratado em 8.3.
107
8.3.
O Plano
μ,
Começa por determinar-se, por exemplo, o ângulo
relativamente ao plano coordenado
α
que mede a inclinação da recta
(fig. 34).
z
F=F r
Z
v
v
r
t
2=2 r
O
3
t
xr
3r
t =t
I=I r
r
Y=Yr
r
x
Hr
y
h
=a'r
n =n
r
3r
H
ar
h =a'=n'
X=X r
1=1r =1r
r
Or
a
Fig. 34
Conduz-se pela recta um plano vertical
π
(note-se que este plano contém o ângulo
μ , que é
o ângulo que recta a faz com a sua projecção horizontal a ' ).
De seguida, determina-se o traço natural, nπ , do plano
rebatimento, do plano
π
para o quadro, que permitirá colocar
μ
π.
A recta nπ será a charneira do
em verdadeira grandeza.
A recta nπ passa pelo ponto 1 (intersecção das rectas hπ e tα ) e pelo ponto 2 (intersecção
das rectas vπ e
t β ).
Como o plano
π
é vertical, então o traço vπ é perpendicular ao traço hπ no ponto 3
(intersecção dos dois traços). Logo, o ponto 3 rπ pertence a uma circunferência de diâmetro
passante pelos pontos
12
1 e 2 (apenas está representada uma semi-circunferência; note-se que
existem duas posições possíveis para o ponto 3 rπ consoante o sentido do rebatimento).
[ ]
Para determinar o ponto 3 rπ é necessário conhecer a verdadeira grandeza do segmento 31
[ ]
(ou 32 ), o que pode ser determinado pelo rebatimento do plano coordenado
os pontos 1 ≡ 1rα e 3 rα pertencem à recta xrα .
α . Neste rebatimento
108
Com centro no ponto 1rα ≡ 1rπ , descreve-se o arco 3rα 3rπ . Este intersecta a semicircunferência de diâmetro
12 no ponto 3rπ .
Os pontos 3 rπ e 1rπ definem a recta hπrπ .
Oo pontos 3 rπ e 2 rπ definem a recta vπrπ .
A recta a intersecta a recta nπ ≡ nπrπ num ponto F ≡ Frπ .
Pelo ponto
H conduz-se um recta paralela à recta 3.3rπ que intersecta a recta hπrπ no
ponto H rπ .
Os pontos H rπ e F ≡ Frπ definem a recta a rπ .
O ângulo
μ rπ
que a recta hπrπ faz com a recta a rπ é a verdadeira grandeza do ângulo
μ.
β
e
Para determinar as inclinações da recta a relativamente aos planos coordenados
δ
procede-se de forma análoga.
• A determinação da inclinação da recta a relativamente ao quadro passa por conduzir por
um ponto P ∈ a qualquer uma recta p perpendicular ao quadro (na verdade este procedimento é
geral quer se trate do quadro ou de outro plano qualquer) (fig. 35), isto é, conduz-se pela recta a um
plano perpendicular ao quadro (ou perpendicular a outro plano se for caso disso).
a
Z
t
p'''
P'''
X1
p1'''
O
a'
P
t
p1'
p
p'
X
Y
t
Z1
x
y
P'
Fig. 35
109
O ângulo que a recta a faz com a recta p é complementar do ângulo pretendido.
Pode determinar-se a recta de intersecção, i , do plano
a. p com o quadro (ou com outro
plano se for caso disso). O ângulo que a recta a faz com a recta i é o ângulo pretendido (a recta i
não está representada na figura).
Para conduzir a recta p faz-se uso do teorema segundo o qual:
“Se uma recta a é perpendicular a um plano α, a sua projecção ortogonal num plano β é perpendicular
à recta comum a α e β”.
A recta
p1 , de projecção horizontal p1 ' , e de projecção lateral p ' ' ' , é uma recta
perpendicular ao quadro conduzida pelo ponto O .
Assim sendo, a recta
p ' é paralela à recta p1 ' e a recta p ' ' ' é paralela à recta p1 ' ' ' (se se
tratasse de outro plano, poderia conduzir-se, por exemplo,
coordenado
p ' através do rebatimento do plano
α ).
Conhecidas as projecções
p ' e p ' ' ' pode conduzir-se a recta p .
A determinação do ângulo entre as rectas a e p faz-se através do rebatimento do plano
a. p .
Para não tornar a figura 35 ilegível, tratar-se-á do rebatimento do plano noutra figura.
• Trate-se agora do rebatimento de um plano.
Embora esta questão tenha sido suscitada pela anterior, será resolvida de forma
independente.
Aproveita-se generalizar a operação REBATIMENTO11 a qualquer tipo de plano.
Seja dado um plano
do rebatimento do plano
11
π
π
através dos seus traços, hπ , vπ , wπ e nπ . O traço nπ é a charneira
para o quadro (fig. 36).
Recorde-se que o movimento de rebatimento pressupõe a existência de dois planos não paralelos entre si.
O rebatimento é o movimento que um deles descreve, em torno da recta comum aos dois, até ficar coincidente com o
outro. Neste movimento todos os pontos descrevem arcos de circunferência contidos em planos perpendiculares à
charneira, isto é, em planos simultâneamente perpendiculares aos dois planos dados.
110
Z
r
t =t
r
Or
z
Z=Z r =Z r
Or
t
v
Z
O
r
w
1=1r =1r
2=2 r =2 r
X
h
n =n
Y
r
Z
Y
t
X
x
y
t =t
r
w
v
r
Z
r
r
Fig. 36
O traço wπ intersecta a recta
tδ no ponto 2 .
O traço vπ intersecta a recta t β no ponto 1 .
O traço nπ passa pelos pontos 1 e 2 , pelo que 1 ≡ 1rπ e 2 ≡ 2 rπ .
Para determinar o rebatimento do plano
π
é suficiente determinar o rebatimento de um ponto,
por exemplo o ponto Z π (ponto de intersecção dos traços wπ e vπ ).
[
Para determinar Z πrπ é preciso conhecer a verdadeira grandeza dos segmentos 1Z π
[2Z π ] ,
que podem ser determinadas pelos rebatimentos dos planos coordenados
respectivamente.
β
e
]
e
δ
,
111
O ponto Z πrπ está na intersecção dos arcos de centro nos pontos
1rπ ≡ 1rβ e 2 rπ ≡ 2 rδ e
raios iguais a 1Z πrβ e 2 Z πrδ , respectivamente.
Estando determinado o ponto Z πrπ , é possível conduzir as rectas vπrπ (passante pelo ponto
1rπ ≡ 1rβ ) e wπrπ (passante pelo ponto 2 rπ ≡ 2 rδ ).
Não se conduziu a recta hπrπ para não tornar a figura ilegível.
112
9.
Autonomia do sistema de representação12
A autonomia de um sistema de representação assenta em duas hipóteses:
1) É possível representar, sem sair do sistema, qualquer entidade geometricamente definida.
Esta questão pode reduzir-se à possibilidade de representar: um ponto qualquer dadas as suas
coordenadas, uma recta qualquer dados dois pontos, um plano qualquer dados três pontos.
2) É possível deduzir, sem sair do sistema, qualquer grandeza geométrica inerente a uma
entidade representada. Esta questão pode reduzir-se à possibilidade de determinar: a grandeza das
coordenadas de um ponto representado, a distância entre dois pontos, o ângulo entre duas rectas
(note-se que a inclinação entre uma recta e um plano e o diedro entre dois semi-planos são sempre
dados pelo ângulo entre duas rectas).
Em suma, se o sistema for autónomo, pode ser considerado como um sistema de
representação geométrico-descritivo.
Tendo sido verificadas as duas hipóteses enunciadas acima, verifica-se que o Sistema
Axonométrico de Representação é autónomo.
12
Gaspard Monge, no séc. XVIII, formulou o conceito de Geometria Descritiva e enunciou os seus objectivos. Deve
entender-se o termo Descritiva num sentido positivista que corresponde ao contexto cultural da época.
Segundo Monge, a Geometria Descritiva têm dois objectivos: 1) dar métodos para representar sobre uma folha de
desenho, que não tem mais de duas dimensões, a saber, largura e comprimento, todos os corpos da natureza, que
têm três, lagura, comprimento e altura, desde que estes corpos possam ser determinados rigorosamente; 2) dar os
modos de reconhecer por meio de uma exacta descrição das formas e dos corpos as verdades geométricas que
delas resultam.
Se um sistema de representação permitir cumprir estes dois objectivos pode-se considerá-lo como geométricodescritivo (no sentido das palavras de Monge).
O conceito de autonomia advém da possibilidade de se cumprirem os objectivos enunciados.
113
10.
Quadro geral de classificação das axonometrias
Do que tem sido dito até agora, surgem várias pistas quanto aos modos de classificar as
axonometrias.
Opta por distinguir-se, embora em geral não seja feito, o termo MONOMETRIA do termo
ISOMETRIA, considerando que o primeiro se refere à igualdade entre todos os coeficientes ou
escalas axonométricas e que o segundo se refere a que todos os coeficientes ou escalas
axonométricas são iguais a 1.
Introduz-se agora a noção de SUB-SISTEMA AXONOMÉTRICO. Um sub-sistema
axonométrico corresponde a uma disposição tipo do referencial articulada com um tipo de projecção.
Nas designações dos sub-sistemas empregam-se os termos por que são comummente
designados e cuja lógica se pode compreender pela leitura da parte 1 deste trabalho.
Assim sendo, no quadro seguinte, tem-se:
QUADRO GERAL DE CLASSIFICAÇÃO DAS AXONOMETRIAS
TIPO DE PROJECÇÃO
COEFICIENTES
Monometria (2)
RELAÇÃO REFERENCIAL/QUADRO
SUB-SISTEMA
3 eixos oblíquos ao quadro
monometria oblíqua
monometria oblíqua
isométrica (3)
cavaleira isométrica
militar isométrica
de Hejduk isométrica
dimetria oblíqua (4)
dimetria oblíqua (5)
cavaleira dimétrica
militar dimétrica
de Hejduk dimétrica
trimetria oblíqua (6)
trimetria oblíqua (7)
monometria ortogonal
dimetria ortogonal
1 eixo paralelo ao quadro
2 eixos paralelos ao quadro
Axonometrias
Oblíquas
3 eixos oblíquos ao quadro
1 eixo paralelo ao quadro
Dimetria
2 eixos paralelos ao quadro
Trimetria
Axonometrias
Ortogonais (1)
Monometria (2)
Dimetria
Trimetria
3 eixos oblíquos ao quadro
1 eixo paralelo ao quadro
3 eixos com igual inclinação
2 eixos com igual inclinação
3 eixos com inclinações
diferentes
trimetria ortogonal
AXONOMETRIA MILITAR (caso em que, sendo oblíqua a direcção de projecção, o plano
coordenado α é paralelo ao quadro)
AXONOMETRIA CAVALEIRA (caso em que, sendo oblíqua a direcção de projecção, o plano
coordenado β ou δ é paralelo ao quadro).
AXONOMETRIA DE HEJDUK (caso particular da axonometria cavaleira ou militar em que dois
eixos axonométricos ficam coincidentes)
114
(1)
Das axonometrias ortogonais excluem-se os casos em que um ou dois planos coordenados são
perpendiculares ao quadro.
(2)
Uma monometria de coeficientes, ou escalas, axonométricos iguais a 1 designa-se por isometria.
(3)
Os resultados obtidos deste modo confundem-se com os obtidos na situação em que dois eixos são
paralelos ao quadro pelo que se poderiam designar por “falsa cavaleira isométrica” ou “falsa militar
isométrica”.
(4)
Se dois coeficientes axonométricos forem iguais a 1, os resultados obtidos deste modo confundem-
se com os obtidos na situação em que dois eixos são paralelos ao quadro pelo, que poderiam
designar-se os sub-sistemas axonométricos por “falsa cavaleira dimétrica” ou “falsa militar dimétrica”.
(5)
Nesta situação podem distinguir-se dois resultados possíveis: dois coeficientes axonométricos são
iguais a 1; dois coeficientes axonométricos são iguais e diferentes de 1.
(6)
Nesta situação podem distinguir-se dois resultados possíveis: um dos coeficientes axonométricos é
igual a 1; os três coeficientes axonométricos são diferentes de 1.
(7)
Nesta situação um dos coeficientes axonométricos é sempre igual a 1, pelo que esta situação pode
confundir-se com a primeira do caso anterior.
115
Parte 3
SISTEMA AXONOMÉTRICO DE REPRESENTAÇÃO - Prática
116
1.
Generalidades
Tal como se viu na parte 2 deste trabalho, o Sistema Axonométrico de Representação é
autónomo, e, por isso, é um sistema de representação geométrico-descritivo.
Contudo, a principal vocação deste sistema de representação é a de permitir representações
de carácter perspéctico da volumetria dos objectos. No entanto, este sistema de representação
privilegia “o que se conhece do objecto” relativamente ao modo “como se vê o objecto”. Isto é, linhas
que se sabe serem paralelas são representadas paralelas, distâncias iguais entre si numa direcção
são representadas por distâncias iguais entre si, e, em alguns casos, há ângulos que são
preservados.
Os objectos em causa podem ser de qualquer tipo, tamanho ou natureza. Podem ser reais ou
imaginários. Podem ser uma ideia ou um conceito.
As circunstâncias e os objectivos da representação podem estar relacionados com a fase
conceptual de um processo criativo, com a necessidade de informar terceiros sobre as características
de um objecto a construir ou do seu modo de funcionamento, com a necessidade de representar ou
documentar um objecto existente (por exemplo, em arquitectura, design, engenharia, etc), com a
necessidade de ilustrar um conceito (por exemplo, em Física ou Matemática), com a necessidade de
comunicação imediata, etc.
1.1.
Sobre os modos de desenhar
“ Gràficamente, uma recta dum plano que se imagina ser o da fôlha de desenho é dada por
um traço desenhado a lápis ou a tira-linhas por meio de uma régua, o qual, por meio da régua, se
pode sempre prolongar até aos limites da folha de desenho e, para além dêstes limites, se deve
imaginar como estendendo-se indefinidamente; um ponto é determinado por um pequeno sinal feito a
lápis ou à pena, ou melhor pela intercepção de duas rectas (...) “ 1
“ Não sabemos ainda representar scientìficamente na folha de desenho entidades que
estejam fora do plano desta fôlha; os pontos, as rectas e os planos do espaço somente podem ser
imaginados ou apresentados por corpos sólidos. Um dos fins da geometria descritiva é precisamente
dar meios de se poder fazer de tais entidades, também, uma representação plana.” 2
“ Não se ocupa a geometria descritiva de todos os meios de que a sciência se serve para
representar num plano as figuras espaciais. Estuda apenas os métodos de representação que têm,
como base, a teoria da projecção paralela – em especial ortogonal – e central. Dentro, porém, da
1
2
Augusto Queiróz, Licções de Geometria Descritiva, pp. 23 e 24 (vidé bibliografia)
Op. Cit. (1), p. 24
117
teoria da projecção paralela ou central, não devem ser impostas restrições ao seu campo de acção.
De outra forma, aparecerá uma geometria descritiva mutilada, rigida e desarmónica, sem as
características que deve possuir uma sciência matemática. Não queiramos reduzir a geometria
descritiva a um estudo de métodos rígidos de representação. Consideremo-la como sciência que
ensina a arte do desenho e da representação, cuja cultura interessa, não sòmente às escolas
técnicas, mas também às escolas de belas artes.” 3
A realidade que é apresentada no primeiro texto já não corresponde inteiramente à que se
vive na actualidade. Os meios de desenho evoluiram. As “folhas” evoluiram, assim como os
instrumentos de traço.
Hoje, com a proliferação dos meios informáticos, que permitem novas abordagens ao
desenho, é preciso reflectir sobre os modos de aplicar a “sciência que ensina a arte do desenho e da
representação”.
Consoante os modos como se desenha, determinados aspectos desta “sciência” são
colocados em evidência. Note-se, ainda, que alguns modos de desenhar colocam em particular
evidência as propriedades geométricas das relações entre ”os pontos, as rectas e os planos do
espaço” relativamente às propriedades geométricas dos sistemas de representação.
Quando se desenha à mão livre, o sujeito dispõe apenas de uma folha de desenho (por
exemplo de papel), de um istrumento de traço (por exemplo uma lapiseira) e, talvez, de uma borracha.
Este tipo de desenho apresenta alguma flexibilidade no que respeita ao rigor gráfico, permite algum
nível de incerteza no conhecimento do objecto a representar, e funciona como método de procura, de
definição, etc. As “réguas” e os “compassos” reduzem-se à mão e seu adestramento, e à capacidade
de observação. Se este tipo de desenho for de natureza científica, é tanto melhor produzido quanto
melhor o sujeito conheça as “geometrias” implicadas. Neste sentido é um tipo de desenho de elevada
exigência.
No desenho manual rigoroso, de natureza científica, as “réguas” e os “compassos são
materializados, isto é, são instrumentos físicos e concretos. É com o auxílio destes que se traça no
papel uma recta “a direito” e uma circunferência com curvatura constante. Este tipo de desenho
pretende-se o mais rigoroso possível do ponto de vista gráfico e não admite incertezas. É em geral
utilizado para representar objectos que já se conhecem, que já estão determinados e definidos. Exige
um profundo conhecimento das propriedades geométricas derivadas da “ teoria da projecção paralela
– em especial ortogonal – e central”, bem como, um elevado nível de conhecimentos de geometria do
espaço.
3
Op. Cit. (1), p. 13
118
Fruto dos tempos em que se vive, este tipo de desenho está cada vez mais a cair em desuso.
Isto é consequência do desenho assistido por computador que apresenta determinado tipo de
vantagens.
O desenho assistido por computador permite ultrapassar algumas limitações do desenho
manual rigoroso na medida em que é mais dinâmico (permite mover, rodar, copiar, escalar partes ou a
totalidade do desenho), permite melhor gestão da informação (neste sentido admite maior
complexidade gráfica) e permite maior e melhor rigor gráfico. A “folha” é em primeiro lugar um monitor
de computador e o desenho nela disposto não apresenta sempre a mesma escala. O registo em papel
é automático. Dir-se-ia que o nível de conhecimentos de geometria que é preciso ter para operar com
este tipo de desenho (quando a folha de papel é substituída por uma folha digital) é idêntico ao que é
necessário ter quando se opera em desenho manual rigoroso.
Contudo, pode especular-se se o facto de no desenho manual rigoroso os instrumentos
auxiliares de traço serem concretos tem ou não alguma implicação no colocar em evidência algumas
propriedades geométricas que de outro modo ficam “invísiveis”. Esta poderá ser uma preocupação de
ordem pedagógica.
Há uma vertente do desenho assistido por computador que se identifica, por uma questão de
distinção, por modelação tridimensional.
Este tipo de desenho introduz diferenças assinaláveis
relativamente ao desenho clássico (seja sobre uma folha de papel ou sobre uma folha digital). Coloca
em segundo plano a “teoria da projecção paralela – em especial ortogonal – e central” no sentido em
que praticamente não é necessário ter conhecimentos sobre os sistemas de representação para
operar. Este modo de desenhar coloca em evidência as propriedade geométricas intrínsecas aos
objectos que se representam, desenrolando-se a representação gráfica de modo automático. As
únicas opções que se têm de tomar relativamente à questão da representação gráfica prendem-se
com a escolha do “ponto de vista” segundo o qual se intervém sobre a “maquete digital”. Em todo o
caso, quanto melhor se quiser controlar o “display”, mais é preciso conhecer as propriedades dos
sistemas de representação.
Esta parte do trabalho é dedicada às questões práticas da representação gráfica relacionadas
com o sistema axonométrico de representação. Estas questões podem evidenciar-se mais ou menos
consoante o tipo de desenho utilizado. Cabe a cada um conseguir perceber a pertinência da aplicação
deste ou daquele método de desenho.
119
2.
Aplicação da Afinidade
Na Parte 2 expuseram-se algumas propriedades da afinidade que agora vão ser úteis.
Uma vez que o sistema axonométrico de representação é subsidiário da projecção cilíndrica,
a quase totalidade dos problemas relacionados com a representação resolve-se com a transformação
afim. Mesmo os problemas relacionados com os rebatimentos devem ser notados graficamente como
sendo afinidades.
Neste sentido, irá aplicar-se a afinidade à resolução de alguns problemas que serão
colocados em evidência, posteriormente, na representação axonométrica.
Com particular incidência, serão tratadas a circunferência e a elipse.
Recorde-se que a afinidade plana fica definida pelo eixo e por um par de pontos afins (desde
que não sejam coincidentes), e que a afinidade espacial fica definida por dois planos e pela direcção
da afinidade.
2.1.
Afinidade plana entre duas figuras - exemplos
• Considere-se uma figura poligonal qualquer, um eixo de afinidade e e um ponto A1 afim de
um ponto A . Os pontos A e A1 definem a direcção d da afinidade (fig. 1).
A
d
A1
B
B1
E
E1
D
C
C1
D1
e
Fig. 1
120
Para determinar a figura afim da figura dada, pode proceder-se do seguinte modo: prolongase a recta A.B até esta intersectar o eixo e . O ponto de intersecção com o eixo e é um ponto duplo
e por ele passa a recta
A1 .B1 . Para determinar o ponto B1 , conduz-se pelo ponto B uma recta com a
direcção d . A intersecção desta recta com a recta
A1 .B1 é o ponto B1 .
Pode, agora, prolongar-se a recta A.E até esta intersectar o eixo e . Pelo ponto de
intersecção passa a recta
A1 .E1 .
Analogamente, determina-se a recta
B1 .E1 . As rectas A1 .E1 e B1 .E1 intersectam-se no ponto
E1 .
Para os restantes pontos procede-se de forma semelhante.
• Se a figura for, por exemplo, uma linha curva qualquer pode considerar-se uma grelha
rectangular, ou não, cujas linhas passem por pontos notáveis da curva. Determina-se a grelha afim
desta e nesta inscreve-se a figura afim da figura dada (fig. 2).
i
A
C=C1
a
i
b
1
D=D1
B
a1
d
b1
A1
e
B1
Fig. 2
É de notar que qualquer ponto afim de um ponto dado pode ser determinado nos termos da
situação anterior. Neste caso, a apresentação da grelha prende-se simplesmente com uma questão
metodológica de desenho.
121
[ ]
[]
• Como colocar em posição afim uma circuferência e1 e uma elipse e , de centro O , dados
[ ] [ ]
os diâmetros conjugados da elipse, 12 e 34 , e um eixo qualquer de afinidade, e (fig. 3)?
P
O1'
d'
4
a1'
1
O
2
a
3
e
Y=Y 1
A
B=B 1
M XY
X=X 1
a1
d
[c]
O1
Q
Fig. 3
[ ]
conduz-se uma recta paralela ao segmento [34] .
Pelo ponto 3 conduz-se uma recta paralela ao segmento 12 .
Pelo ponto 2
Estas duas rectas intersectam-se no ponto A .
Os pontos A e O definem a recta a .
A recta a intersecta o eixo e no ponto
A recta
B ≡ B1 .
a1 afim da recta a deverá fazer com as rectas 31.41 e 11.21 (afins das rectas 3.4 e
1.2 , respectivamente) ângulos de 45º no ponto afim de O , uma vez que deverão ser 31.41 = 1121 .
Por outro lado, as rectas
31.41 e 11.21 deverão ser perpendiculares entre si no ponto afim de
O.
Prolongam-se as rectas 3.4 e 1.2 até intersectarem o eixo e .
A rectas 1.2 e 3.4 intersectam o eixo e nos pontos Y ≡ Y1 e X ≡ X 1 , respectivamente.
Pelos pontos
X ≡ X 1 e Y ≡ Y1 passarão as rectas 31.41 e 11.21 , respectivamente.
122
Como as rectas
31.41 e 11.21 deverão ser perpendiculares entre si no ponto afim de O ,
[]
então, o ponto afim de O deverá pertencer à circunferência c de centro
A recta a ≡ O. A intersecta o eixo e no ponto
M XY e diâmetro XY .
B ≡ B1 .
[ ]
[]
A mediatriz do segmento XY intersecta a circunferência c nos pontos P e Q .
Pelos pontos
P e B ≡ B1 conduz-se a recta a1 que intersecta a circunferência [c ] no ponto
Pelos pontos
Q e B ≡ B1 conduz-se a recta a1 ' que intersecta a circunferência [c ] no ponto
O1 .
O1 ' .
Verifica-se que as rectas
a1 e a1 ' correspondem às possíveis rectas afins da recta a ,
considerando o eixo e , de tal modo que se verifique que 31.41 = 11 21 . Isto é, de tal modo que os
ângulos que a recta
pontos
a1 (ou a1 ' ) faz com as rectas 31.41 e 11.21 sejam de 45º , e que, assim sendo, o
O1 e O1 ' correspondem aos possíveis pontos afins do ponto O considerando o eixo e .
Demonstrando:
Considerem-se as rectas
O1 .X 1 e O1 .Y1 .
Como o ângulo que a recta X 1 .M XY faz com a recta M XY .P é de 90º , então o ângulo que a
recta
O1 .X 1 faz com a recta O1 .P é de 45º .
Analogamente, o ângulo que a recta O1 .P faz com a recta O1 .Y1 é de 45º .
Isto porque,
X 1 , Y1 , P e O1 são pontos da mesma circunferência [c ] de centro M XY .
Logo, as rectas
O1 .X 1 e O1 .Y1 coincidem com as rectas 31.41 e 11.21 , respectivamente.
O mesmo raciocínio pode ser utilizado considerando as rectas O1 '.X 1 e O1 '.Y1
Pelo exposto, a afinidade de eixo e e direcção
[ ]
[ ]
O.O1 transforma a elipse [e] de centro O e
[ ]
diâmetros conjugados 12 e 34 na circunferência e1 e de centro
[11.21 ] e [31.41 ], respectivamente.
O1 e diâmetros conjugados
123
O mesmo é válido para a afinidade com o mesmo eixo e direcção
2.2.
O.O1 ' .
Aplicação da afinidade plana ao desenho da elipse definida por dois
diâmetros conjugados
[ ] [ ]
Considere-se uma elipse de centro O definida por dois diâmetros conjugados 12 e 34
(fig. 4).
B
4
C=C1
1
O
41
2=21
A
B1
O1
3
D=D1
e
11
31
A1
Fig. 4
[
]
[ ] [ ] [ ]
• Esta elipse está inscrita num paralelogramo A, B, C , D . Os lados AB , BC , CD e
[DA] do paralelogramo têm como pontos médios os pontos 1, 4 , 2
e 3 , respectivamente.
Tome-se, por exemplo, a recta C.D como eixo e de uma afinidade plana que transforma o
[
]
[
]
paralelogramo A, B, C , D no quadrado A1 , B1 , C1 , D1 .
Nesta afinidade, os pontos C , D e 2 são duplos, isto é,
A direcção d da afinidade fica definida pela recta
C ≡ C1 , D ≡ D1 e 2 ≡ 21 .
O.O1 .
Os pontos da elipse inscrita no paralelogramo serão afins dos pontos da circunferência
inscrita no quadrado.
124
Por exemplo, os pontos comuns à circunferência e às diagonais do quadrado são afins dos
pontos comuns à elipse e às diagonais do paralelogramo. Para os determinar podem conduzir-se
pelos pontos da circunferência rectas com direcção
A1 .D1 que se sabe serem afins de rectas com a
direcção D. A . Os pontos fixos destas rectas situam-se, obviamente, no eixo e .
Outra possibilidade para a determinação destes pontos da elipse consiste em conduzir pelos
pontos da circunferência rectas com a direcção da afinidade.
Quaisquer outros pontos podem ser determinados de forma análoga.
• Na sequência do traçado atrás referido, podem determinar-se os pontos notáveis da elipse,
isto é, os extremos dos eixos maior e menor, e os focos (fig. 5).
B
e
4
P
C=C1
1
O
F'
Z=Z 1
F''
N
M
d
A
2=21
41
N1
MOO1
P1
Q
D=D1
3
B1
O1
X=X 1
Q1
[c]
M1
31
Y=Y 1
11
A1
Fig. 5
[
]
Considere-se a mediatriz do segmento OO1 . Esta recta intersecta o eixo e no ponto X .
[]
Com centro no ponto X , conduz-se uma circunferência c passante pelos pontos O e
(note-se que XO = XO1 ). Esta circunferência intersecta o eixo e nos pontos
Y e Z.
Note-se que, por pertencerem ao eixo e , os pontos X , Y e Z são duplos, isto é
Y ≡ Y1 e Z ≡ Z1 .
As rectas Y.O e Z.O são afins das rectas
O1
Y1 .O1 e Z1 .O1 , respectivamente.
X ≡ X1 ,
125
Como os pontos O e
O1 pertencem à circunferência [c ] de diâmetro [ XY ] , então as rectas
Y .O e Z .O são perpendiculares entre si no ponto O . Similarmente, as rectas Y1 .O1 e Z1 .O1 são
perpendiculares entre si no ponto O1 . Isto é, dois diâmetros conjugados,
[
circunferência são afins de dois diâmetros conjugados, MN
[
]
[M 1 N1 ]
e
[P1Q1 ] ,
da
[ ]
e PQ , da elipse perpendiculares
] [ ]
entre si. Logo, MN e PQ são os eixos principais da elipse.
Para determinar os pontos M , N , P e
Q , conduzem-se pelos pontos M 1 , N1 , P1 e Q1
rectas com a direcção da afinidade. As rectas que passam pelos pontos
M e N intersectam a recta
Z.O nos pontos M 1 e N1 . As rectas que passam pelos pontos P1 e Q1 intersectam a recta Y.O
nos pontos
P1 e Q1 .
Com raio igual ao semi-eixo maior e centro num extremo do eixo menor, conduz-se uma
circunferência que intersecta o eixo maior da elipse nos pontos
2.3.
F ' e F ' ' , os focos da elipse.
Aplicação da afinidade plana à condução de rectas tangentes à elipse
definida por dois diâmetros conjugados
[ ] [ ]
Considere-se uma elipse definida por dois diâmetros conjugados 12 e 34 .
Prescinde-se do desenho da elipse.
Em todos os casos considera-se apenas o desenho de uma circunferência afim da elipse, nos
termos das figuras 4 e 5.
• Vai conduzir-se uma recta tangente à elipse por um ponto
T que lhe pertence (fig. 6).
4
R=R1
r
1
O
41
r1
2=21
T
a
3
O1
a1
t
F=F1
e
11
31
t1
Fig. 6
T1
126
Considere-se o ponto T da elipse determinado nos termos das figuras precedentes.
Pelo ponto
T1 afim de T conduz-se a recta t1 tangente à circunferência. A recta t1 intersecta
o eixo e da afinidade num ponto duplo F ≡ F1 .
Pelos pontos F ≡ F1 e T passa a recta t , afim da recta t1 , tangente à elipse no ponto T .
• Vai, agora, conduzir-se uma tangente à elipse por um ponto P que lhe é exterior (fig. 7).
4
1
O
41
t
2=21
a
T
c
3
O1
a1
b
P
b1
31
c1
11
P1
T1
F=F1
t1
e
Fig. 7
Em primeiro lugar, determina-se o ponto
P1 afim do ponto P .
Não será dada nenhuma explicação, uma vez que este traçado já foi múltiplas vezes referido.
Pelo ponto
P1 conduz-se uma recta t1 tangente à circunferência afim da elipse.
A recta
t1 é tangente à circunferência no ponto T1 .
A recta
t1 intersecta o eixo e da afinidade num ponto duplo F ≡ F1 .
Pelos pontos F ≡ F1 e
P passa a recta t , afim da recta t1 , tangente à elipse no ponto T .
A determinação do ponto T faz-se de modo inverso à determinação do ponto P1 .
• A determinação de uma recta tangente à elipse paralela a uma recta dada é em tudo
semelhante ao que foi exposto para o caso do ponto exterior. É de notar que esta situação
corresponde a considerar o ponto exterior como sendo impróprio.
127
2.4.
Aplicação da afinidade espacial à determinação da orientação de uma
circunferência dada a sua projecção cilíndrica e dada a direcção de
projecção
Veja-se esta aplicação recorrendo a um mínimo de elementos gráficos.
[ ] de centro O e diâmetros conjugados [12] e [34] como
[c] , e uma direcção de projecção p da qual está representada a
Considere-se uma elipse e
projecção de uma circunferência
projecção ortogonal no plano da elipse,
p ' ' (fig. 8).
4
p''
1
O
2
3
Fig. 8
Note-se que está em questão a determinação da orientação da circunferência e não uma
posição específica. Determinada a orientação, por meio de uma translacção segundo a direcção de
projecção, pode colocar-se a circunferência na posição que se pretenda.
Considere-se um plano
π
qualquer ortogonal à direcção p .
Pelos pontos 1 , 2 , 3 , 4 e O conduzam-se rectas com a direcção p , isto é, rectas
projectantes. Estas rectas intersectam o plano
π
nos pontos 1' , 2' , 3' , 4' e O ' , respectivamente.
[ ] [ ]
[]
Os segmentos 1'2' e 3'4' são diâmetros conjugados de uma elipse e ' de centro no ponto
O' contida no plano π .
[]
[]
A elipse e ' é a projecção ortogonal da circunferência c no plano
[]
π.
[ ]
Determinem-se os eixos maior e menor da elipse e ' . Identificar-se-á o eixo maior por AB e
[ ]
o eixo menor por CD .
A direcção do eixo maior está contida na orientação do plano que contém a circunferência
[c] , e a medida de
AB é igual ao seu diâmetro.
128
Considere-se o plano
No plano
δ
δ
[ ]
definido por CD e pela direcção de projecção p .
I qualquer da recta projectante do ponto O , descreve-
, com centro num ponto
[]
se uma circunferência a de diâmetro igual a
AB .
[]
A circunferência a intersecta a recta projectante do ponto C nos pontos X e
[]
X1 .
As orientações possíveis para a circunferência c ficam definidas pelas direcções das rectas
A.B e I. X , e das rectas A.B e I . X 1 .
Na figura 9 apresenta-se uma perspectiva do resultado final.
X1
[a]
I
X
4'
A
C
1'
O'
2'
[e]'
D
p
3'
p
p
p
p
4
[e]
2
O
1
3
Fig. 9
B
p
129
3.
O problema das escalas e dos coeficientes – Axonometrias Métricas e
Axonometrias Convencionais
Considere-se um desenho axonométrico produzido a uma determinada escala, por exemplo
1
.
100
A esta representação correspondem determinados coeficientes axonométricos. Por hipótese,
considere-se que o coeficiente C z = 0.9 .
Considere-se, ainda, uma medida a paralela ao eixo coordenado
z.
No desenho, a medida a está sujeita à escala do desenho, isto é, a medida a é
a
.
100
Sabendo que a medida a tem a direcção do eixo coordenado z , a projecção de a , isto é,
representada por uma medida
a ' , vem multiplicada pelo coeficiente C z .
⎛ a ⎞
⎟C z .
⎝ 100 ⎠
Resumindo, no desenho a medida a ' traduz-se por ⎜
Numa situação deste tipo, em que todas as medidas no desenho resultam simplesmente de
uma projecção e da escala do desenho, tem-se uma AXONOMETRIA MÉTRICA.
Considere-se agora a aplicação de uma homotetia de factor
Δ à axonometria, isto é, a
ampliação ou redução (não interessa considerar o caso em que Δ = 1 ) da axonometria mantendo as
proporções da representação.
⎛ a ⎞
⎟C z .
⎝ 100 ⎠
Nesta situação a medida a ' ficará traduzida por Δa ' , isto é, Δ⎜
O que sucedeu ao desenho?
Na prática apenas aconteceu que o desenho ficou maior ou menor. Contudo, este resultado
pode ser lido de vários modos.
130
Por um lado, pode dizer-se que a escala do desenho passou de
1
1
para Δ
e que a
100
100
medida a se manteve.
Por outro lado, pode dizer-se que a escala se manteve
1
e que a medida a passou para
100
Δa , isto é, o objecto da representação aumentou ou diminuiu.
Em ambos os casos continuam a ter-se axonometrias métricas.
Porém, se se convencionar que a escala do desenho se manteve
1
e que a medida a não
100
aumentou nem diminuiu, então o coefieciente C z passa a ser substituído por ΔC z , isto é, por uma
escala axonométrica
Ez .
Neste caso a medida a ' vem representada por E z
a
.
100
No fundo, opera-se com a escala axonométrica como se se tratasse de um coeficiente.
Numa situação deste tipo, em que todas as medidas no desenho resultam do produto de uma
projecção por uma homotetia (isto é, de uma escala axonométrica diferente do coeficiente
axonométrico), e, da escala do desenho, tem-se uma AXONOMETRIA CONVENCIONAL.
Por vezes, é conveniente operar com escalas axonométricas diferentes dos coeficientes
axonométricos, isto é, operar com axonometrias convencionais, como se irá verificar adiante através
de uma situação prática.
Suponha-se uma axonometria em que, por exemplo,
C z = 0.75 , C y = 0.75 e C x = 0.5
(para esta explicação não se farão quaisquer referências à escala do desenho).
Nesta situação, uma medida a vem representada por a
z ou y , ou por a
1
se for paralela ao eixo coordenado x .
2
3
se for paralela ao eixo coordenado
4
131
Considere-se uma homotetia que transforma
pode escrever-se Δ =
Ex =
C z = 0.75 em E z = 1 . O factor da homotetia
1
4
1
, isto é, Δ = . Neste caso, a escala E x será dada por Δ , isto é,
3
3
2
4
2
.
3
Com a homotetia passa a ter-se uma axonometria em que
Ez = 1 , E y = 1 e Ez =
2
.
3
Nesta situação, uma medida a vem representada por a se for paralela aos eixos
coordenados
z e y , ou por a
2
se for paralela ao eixo coordenado x .
3
Em termos práticos, em geral, torna-se mais simples representar em axonometria
convencional. Na prática, tal como já foi dito, tratam-se as escalas como se fossem coeficientes,.
Com efeito, para que a axonometria convencional seja expedita em termos operativos, deve
notar-se que é conveniente reduzir o maior dos coeficientes axonométricos a uma escala
axonométrica igual a 1 .
Esta é uma consideração prática que tem forte eco quando relacionada com as questões da
representação de objectos.
Caberá a cada um optar pela situação mais vantajosa consoante o tipo de problema de
representação que tiver em presença.
132
4.
Representação Axonométrica – considerações gerais
Esta parte do trabalho será orientada em função da representação de objectos.
Antes de começar a representar um objecto qualquer, é preciso que o sujeito tenha uma certa
capacidade de previsão e antecipação dos resultados. É preciso ter a noção dos objectivos da
representação. Só assim se pode escolher “o bom ângulo de visão”, o que se traduz imediatamente
na escolha do sub-sistema axonométrico.
Este é um esforço que cada um deve fazer antes de iniciar qualquer representação.
Se houver o objectivo de que as representações não resultem desproporcionadas
relativamente aos objectos representados, é conveniente que os coeficientes ou as escalas
axonométricos não ultrapassem o valor
1 e não sejam muito diferentes uns dos outros. Para o efeito,
a sensibilidade do sujeito que representa é soberana.
Admite-se contudo que o objectivo da representação seja outro e que esta restrição não se
coloque.
A posição dos referenciais pode ser determinada (se forem dadas as condições que permitem
obter todos os vértices do triângulo fundamental) ou indeterminada. Neste último caso, podem ser
dados elementos que apenas permitam determinar a orientação do referencial ou não (esta situação
não serve para a representação; para que sirva, devem ser arbitrados os elementos que permitam,
pelo menos, a determinação da orientação do referencial).
Em muitos casos é perfeitamente possível representar objectos sem conhecer a posição ou a
orientação do referencial (não quer isto dizer que a orientação não possa ser determinada). É o caso
das axonometrias convencionais.
Nos dois capítulos seguintes (5 e 6) resolver-se-á o exercício da representação de um cubo.
O objectivo é avaliar a complexidade da representação em função das premissas, no sentido de
verificar quais os sub-sistemas com operatividade mais expedita.
133
5.
Representação em Axonometria Métrica
Operar com axonometrias métricas pressupõe que se conheça o referencial em posição
(determinados os vértices do triângulo fundamental) ou em orientação. No caso de se conhecer
apenas a orientação, é necessário arbitrar uma posição. Note-se que os coeficientes axonométricos
não são, em princípio, dados à partida e são função da inclinação dos eixos e da direcção de
projecção.
Para as explicações dadas em seguida, consideram-se referenciais dados em posição pelos
vértices do triângulo fundamental. Recorde-se que a determinação da posição de um referencial pode
ser feita em função de determinados dados, de acordo com o exposto no capítulo 6 da Parte 2 deste
trabalho.
5.1.
Três eixos coordenados oblíquos ao quadro
Nesta situação existem três casos possíveis: os três eixos têm inclinações diferentes com o
quadro (triângulo fundamental escaleno), dois eixos têm inclinações iguais relativamente ao quadro
(triângulo fundamental isósceles) e os três eixos têm inclinações iguais relativamente ao quadro
(triângulo fundamental equilátero).
Para que os coeficientes axonométricos sejam menores ou iguais a 1 , a projecção da origem
O do referencial tri-ortogonal deverá estar contida no porção de quadro comum aos círculos [x ] , [ y ]
[]
e z , de centros nos pontos X , Y e Z (vértices do triângulo fundamental) e raios iguais a XO ,
YO e ZO , respectivamente (ver fig. 8 – Parte 2).
Z
[dx.y]
[dy.z]
[y]
[x]
I
C
[z]
[dz.x]
Y
X
Fig. 10
134
Cumulativamente com a condição anterior, para que haja dimetria, a projecção da origem O
[
[ ] (determinadas
] [ ]
deverá estar contida numa porção de uma das circunferências d XY , d zx ou d yz
nos termos das figuras 12 e 13 da Parte 2), e para que haja monometria, a projecção do ponto O
deverá coincidir com o ponto
I comum às circunferências [d XY ] , [d zx ] ou [d yz ] .
Após estas considerações, veja-se representação do cubo.
Apresentam-se apenas os resultados fazendo notar que a representação é feita nos termos
do que foi exposto no capítulo 7 da Parte 2, isto é, a representação é obtida por meio dos
rebatimentos dos planos coordenados para o quadro. Note-se, no entanto, que se algum dos
coeficientes for igual a 1 a marcação das medidas na direcção correspondente é feita de forma directa
sem passar pelo rebatimento (fig. 11).
z
Or
z
Or
zr
Or
Z
Z
Z
zr
[dx.y]
[dx.y]
Or
O
O
O
Y
X
y
y
xr
xr
z
Or
Zz
Or
zr
Z
x
X
Y
x
y
xr
z
X
Y
x
yr
[dz.x]
Z
Or
zr
Or
O
O
O
x
X
Y
y
yr
X
Y
x
y
y
Y
X
x
xr
xr
Fig. 11
Na 1ª linha da figura 11 considerou-se um triângulo fundamental escaleno (os traçados seriam
semelhantes se fossem considerados triângulos isósceles ou equiláteros).
Da esquerda para a direita, tem-se a axonometria do cubo em trimetria oblíqua, dimetria
oblíqua e monometria oblíqua (considerando que os coeficientes axonométricos devem ser inferiores
ou iguais a
1 ) .Não é possível produzir uma monometria oblíqua se o triângulo fundamental for
equilátero.
Na 2ª linha da figura 11 considerou-se a direcção de projecção ortogonal ao quadro.
135
Da esquerda para a direita, tem-se uma trimetria ortogonal (triângulo fundamental escaleno),
uma dimetria ortogonal (triângulo fundamental isósceles) e uma monometria ortogonal (triângulo
fundamental equilátero). Isto é, se a projecção for ortogonal, o triângulo fundamental condiciona o tipo
de axonometria. Assim sendo, é oportuno recordar que nas axonometrias ortogonais, à trimetria
correspondem
ângulos
axonométricos
diferentes,
à
dimetria
correspondem
dois
ângulos
axonométricos iguais e à monometria correspondem ângulos axonométricos iguais.
5.2.
Um eixo coordenado paralelo ao quadro
Neste caso não se considera a projecção ortogonal ao quadro.
Considere-se o eixo coordenado
z paralelo ao quadro. A projecção ortogonal da origem O
no quadro coincide com o ponto C (fig. 12).
[dx.y]
I'
[dz.x]
[dz.y]
C
X
Y
I
Fig. 12
Neste caso, seja qual for a direcção de projecção, o coeficiente axonométrico C z é sempre
igual a 1 .
Para que os coefientes axonométricos
C x e C y sejam menores ou iguais a 1 , a projecção da
origem O do referencial tri-ortogonal deverá estar contida no porção de quadro comum aos círculos
[d zx ] e [d yz ] , de centros nos pontos
X e Y e raios iguais a XO e YO , respectivamente (ver fig. 14
da Parte 2).
Cumulativamente à condição anterior, para que haja dimetria, a projecção de O deverá estar
[
] [ ] ou [d yz ]
contida numa porção de uma das circunferências d XY , d zx
(determinadas nos termos
das figuras 12 e 14 da Parte 2), e para que haja monometria, a projecção de O deverá coincidir com
o ponto I ou I ' .
136
Após estas considerações, veja-se a representação do cubo.
Também neste caso se apresentam apenas os resultados, uma vez que a representação
corresponde a um caso particular do que foi exposto anteriormente.
Apenas se recorre aos rebatimentos nos casos em que os coeficientes axonométricos são
inferiores a 1. Nos casos em que os coeficientes são iguais a 1, a marcação das medidas é directa
(fig.13).
z
z
z
[dx.y]
O
O
yr
yr
Y
y
xr
X
C
x
Y
y
X
C
xr
Y
x
y
z
Or
X
C
x
z
Or
Or
[dz.x]
O
O
yr
Y
y
X
C
xr
x
Y
y
X
C
xr
x
Or
Or
Fig. 13
Na 1ª linha da figura 13 tem-se (da esquerda para a direita) a axonometria do cubo em
trimetria oblíqua, dimetria oblíqua (é C x = C y ≠ 1 ) e dimetria oblíqua (é
Cx = Cz = 1 ).
Na 2ª linha da figura 13 foi considerada a direcção de projecção ortogonal ao traço X .Y .
No primeiro caso foi produzida uma trimetria. No segundo caso, para que fosse produzida
uma dimetria ( C x = C y ), considerou-se que os eixos coordenados x e y estão igualmente
[ ]
inclinados relativamente ao quadro. Como consequência, C é o ponto médio do segmento XY .
Neste caso não foram consideradas as monometrias, uma vez que o resultado gráfico da
projecção equivale à situação em que dois eixos coordenados são paralelos ao quadro.
137
5.3.
Dois eixos coordenados paralelos ao quadro
Esta situação, pela sua simplicidade, não carece dos desenvolvimentos explicitados para as
anteriores.
Com efeito, consideraram-se três casos (fig. 14).
z
O
z
z
Cz=1
Cy=1
Cx=1
Cx=1
Cx=1
Cy<1
Cz<1
Cz=1 e Cy<1
ou
Cy=1 e Cz<1
O
x
O
x
x
y
y
y
Fig. 14
Para efeitos de simplificação do discurso, pode considerar-se a origem do referencial triortogonal contida no quadro.
No primeiro caso tem-se o plano coordenado
β̂
β
paralelo ao quadro. O ângulo axonométrico
é de 90º . Os outros dois ângulos axonométricos podem variar livremente desde que
βˆ + αˆ + δˆ = 360º .
Tem-se C z = C x = 1 .
Para que o coeficiente C y ≤ 1 , deve considerar-se que a inclinação de projecção
relativamente ao quadro é maior ou igual a 45º . Esta consideração faz-se por meio da livre escolha
do coeficiente C y . Note-se que C y corresponde à co-tangente do ângulo que mede a inclinação da
projecção.
138
Este sub-sistema axonométrico designa-se por axonometria cavaleira (pode ser o plano
coordenado
δ
paralelo ao quadro). À esquerda na figura 14 estão representados 3 cubos em
axonometria cavaleira. O primeiro cubo está em isometria e os restantes em dimetria.
No segundo caso, tem-se o plano coordenado
α̂
α
paralelo ao quadro. O ângulo axonométrico
é de 90º . Os outros dois ângulos axonométricos podem variar livremente desde que
βˆ + αˆ + δˆ = 360º .
Tem-se C y = C x = 1 .
As considerações explicitadas no caso anterior para o coeficiente C y são válidas, neste caso,
para o coeficiente
Cz .
Este sub-sistema axonométrico designa-se axonometria militar. Ao centro na figura 14 estão
representados 2 cubos em axonometria militar. O primeiro cubo está em isometria e o outro em
dimetria.
O terceiro caso (à direita na figura 14) corresponde a uma situação limite dos anteriores,
quando dois eixos axonométricos coincidem. Este sub-sistema axonométrico designa-se por
axonometria de Hejduk (ou cavaleira-militar).
139
6.
Representação em Axonometria Convencional
Neste caso não é, em geral, necessário conhecer a posição nem a orientação do referencial.
Considera-se que se está a operar com axonometrias convencionais sempre que se arbitrar a
posição dos eixos axonométricos e se impuser a estes as escalas axonométricas que se tomem como
mais convenientes para a representação.
Fruto do teorema de Polhke-Schwarz, podem impor-se sobre três eixos axonométricos
quaisquer três segmentos
u x , u y e u z quaisquer, tais que podem ser considerados como projecção
cilíndrica de três segmentos unitários U perpendiculares entre si (ver 6.10 – Parte 2). Logicamente, a
cada direcção axonométrica corresponde um coeficiente axonométrico.
Tal como se viu no capítulo 3, é possível reduzir os coeficientes axonométricos a escalas
axonométricas que correspondam a valores mais cómodos do ponto de vista operativo.
Destas considerações resulta que é legítimo impor directamente às direcções axonométricas
as escalas axonométricas que se pretender. Essa imposição pode ser gráfica, resultando da relação
entre os comprimentos de três segmentos. Mais uma vez se nota que é conveniente que ao maior dos
segmentos deve corresponder a escala axonométrica 1 .
Daqui resulta que não há nenhuma vantagem prática em utilizar as axonometrias
normalizadas4.
6.1.
Três eixos coordenados oblíquos ao quadro
No sentido em que se podem impor directamente aos eixos axonométricos as escalas que se
entender, a resolução do exercício de representação do cubo é directa (fig. 15).
z
z
Ez=1
Ex<1
Ey<1
Ex=Ey
z
Ez=1
Ex=1
Ey<1
O
O
z
Ez=1
Ex=1
Ey=1
Ez=1
Ex=1
Ey=1
O
O
y
x
x
x
y
y
y
x
Fig. 15
4
As axonometrias normalizadas correspondem a um conjunto de sub-sistemas axonométricos definidos pela norma
ISO 5456-3 com vista à uniformização internacional da representação. A estes sub-sistemas correspondem ângulos
axonométricos específicos e escalas axonométricas específicas para cada sub-sistema. Com efeito, nas
axonometrias ortogonais normalizadas os ângulos axonométricos podem ser determinados fazendo uso do que foi
expresso no sub-capítulo 6.4.1. da Parte 1 deste trabalho. Em todo o caso, como se pretendem obter escalas de fácil
operatividade, as determinações gráficas dos ângulos axonométricos introduzem sempre um mínimo de erro. Pelo
exposto, se se for inteiramente rigoroso do ponto de vista matemático, estas axonometrias são “quase” ortogonais. A
única que se mantém rigorosamente ortogonal é a Isometria.
140
Da esquerda para a direita, tem-se: trimetria oblíqua, dimetria oblíqua, isometria oblíqua, e
isometria ortogonal (os ângulos axonométricos são de 120º).
Se forem dados os comprimentos dos segmentos
u x , u y e u z , e se se impuser que a
direcção de projecção seja ortogonal, então procede-se nos termos do 6.4. da Parte 2.
6.2.
Um eixo coordenado paralelo ao quadro
Sejam dados os eixos axonométricos impondo que o eixo coordenado
z seja paralelo ao
quadro (pode impor-se que seja outro eixo paralelo ao quadro), isto é, E x = E y = 1 .
Vai subdividir-se esta situação em dois casos.
No primeiro caso, arbitram-se nos eixos axonométricos x e y dois segmentos
u x e u y que
correspondem a dois segmentos unitários U perpendiculares entre si (fig.16).
z
uy
z
Ez=1
Ex<1
Ey<1
Ex=Ey
O ux
O
xr
xr
yr
x
Y
ux
uy
yr
y
Ez=1
Ex<1
Ey<1
Ex=Ey
y
X
x
Y
X
Or
Or
Fig. 16
À esquerda na figura 16 tem-se uma trimetria oblíqua ( u x ≠ u y ) e à direita tem-se uma
dimetria oblíqua ( u x = u y ).
Arbitra-se o traço X .Y do plano coordenado
axonométrico
z.
α
sabendo que deve ser perpendicular ao eixo
141
Tomando
u x e u y como semi-diâmetros conjugados de uma elipse de centro na projecção da
origem O , o ponto
Orα determina-se nos termos em que se determinam os pontos O1 e O1' na
figura 3.
No segundo caso, arbitram-se dois segmentos
u z = U e u x que correspondem a projecções
de segmentos unitários U perpendiculares entre si (fig. 17).
z
z
A
Ez=1
Ex<1
Ey<1
Ex=Ey
Ez=1
Ex=1
Ey<1
uz
yr
O ux
xr
Y
yr
x
y
O
Y
X
x
y
X
Or
Or
Fig. 17
À esquerda na figura 17 tem-se uma trimetria oblíqua.
Arbitra-se o traço X .Y do plano coordenado
axonométrico
α
sabendo que deve ser perpendicular ao eixo
z.
Pelo ponto X
conduz-se uma recta paralela à recta que passa pelos extremos dos
segmentos u x e u z . Esta recta intersecta o eixo axonométrico z no ponto A .
A distância OA deverá ser igual à distância XOrα (note-se que sobre o eixo axonométrico z
as medidas estão em verdadeira grandeza).
Obtido o ponto
plano coordenado
α
Orα sobre a semi-circunferência de diâmetro [ XY ] , a face do cubo contida no
é representada pelo seu contra-rebatimento.
À direita na figura 17 tem-se uma dimetria oblíqua em que
traço X .Y , a distância OX deverá ser igual a XOrα .
E z = E x = 1 . Logo, arbitrado o
142
Obtido o ponto
Orα sobre a semi-circunferência de diâmetro [ XY ] , a representação do cubo
faz-se como no caso anterior. Note-se que sobre o eixo axonométrico x podem marcar-se
directamente as medidas.
Embora nestes casos se tenham imposto sobre os eixos axonométricos determinadas
grandezas que vão implicar determinadas escalas, é um facto que, sendo sempre E z = C z = 1 ,
também
E x = C x e E y = C y . Deste modo, estas axonometrias acabam por não deixar de ser
métricas, embora se tenham convencionado as escalas.
6.3.
Dois eixos coordenados paralelos ao quadro
Pode considerar-se que as axonometrias cavaleira, militar e de Hejduk são simultaneamente
métricas e convencionais. São convencionais porque se pode convencionar a escala que se desejar
para o eixo axonométrico correspondente ao eixo coordenado perpendicular ao quadro; são métricas
porque a essa escala corresponde um coeficiente axonométrico igual.
143
7.
Axonometria Métrica ou Axonometria Convencional ?
Em função da resolução do exercício de representação do cubo, aplicando o que se pode
designar como o método geral para a representação, fica-se habilitado a fazer uma selecção daqueles
sub-sistemas que parecem de operatividade mais prática e expedita.
Sobre esses sub-sistemas serão expostos alguns métodos práticos para a representação de
objectos.
A escolha do método e do sub-sistema adequado a cada caso depende das circunstâncias e
dos objectivos em que se desenvolve a representação e caberá a cada individuo fazer essa opção.
Obviamente, admite-se a utilização de qualquer sub-sistema aqui não eleito.
Das axonometrias métricas elegem-se:
• (três eixos coordenados oblíquos ao quadro)
- axonometrias ortogonais
• (um eixo coordenado
- axonometrias com a direcção de projecção
z paralelo ao quadro)
ortogonal ao traço X .Y
• dois eixos paralelos ao quadro)
5
- axonometria cavaleira e axonometria militar
Das axonometrias convencionais elege-se:
• (três eixos oblíquos ao quadro)
- axonometrias oblíquas e isometria ortogonal
Uma conclusão parece clara.
Com as axonometrias convencionais é mais fácil escolher o “bom ângulo de visão” e é
igualmente mais fácil e directo exercer um controlo sobre as proporções das representações. Sem
mais nada, dir-se-ia que sempre que possível se deve optar pela representação axonométrica
convencional, uma vez que aligeira a carga gráfica dos desenhos.
Contudo, pedagogicamente, pode questionar-se se este é o caminho mais correcto. É que se
em termos práticos é muito mais fácil a representação, já o entendimento profundo do sistema de
representação se torna mais difícil, por exemplo, quando comparado com as axonometrias ortogonais
em que a operatividade é um pouco mais complexa.
5
Obviamente que pode ser qualquer outro eixo paralelo ao quadro pelo que a direcção de projecção pode ser
ortogonal aos traços X .Z ou Y.Z .
Este tipo de axonometria, tanto quanto é possível conhecer, não é utilizada. Tal facto causa espanto, sobretudo
porque a sua utilização prática é de extrema simplicidade. Com efeito, é mais simples que algumas axonometrias que
são normalmente utilizadas.
144
8.
Métodos para a representação axonométrica de objectos
Propositadamente, o objecto que se elege para a exposição dos métodos não apresenta
superfícies curvas. Faz-se aqui a chamada de atenção que sempre que os objectos a representar
apresentem curvas, as representações dessas curvas podem ser feitas aplicando uma afinidade (que
pode coincidir com a afinidade do rebatimento, se for caso disso). Recomenda-se, pois, que se
consulte o que foi exposto no capítulo 2.
Considere-se um objecto dado por três vistas ortogonais (fig. 18).
z
z
y
x
(x)
ALÇADO FRONTAL
ALÇADO LATERAL ESQUERDO
(y)
ALÇADO FRONTAL
ALÇADO LATERAL ESQUERDO
y
(z)
PLANTA
PLANTA
x
Fig. 18
O primeiro passo da representação consiste em associar os eixos do referencial ao objecto..
Esta operação denomina-se ORIENTAR O OBJECTO relativamente ao referencial.
Na prática, esta operação pode traduzir-se na representação dos eixos nas vistas (à direita na
figura 18).
Após esta operação e definidos os eixos axonométricos pode produzir-se a axonometria.
Distingam-se, agora, alguns métodos para a representação de objectos:
MÉTODO DO PARALELEPÍPEDO ENVOLVENTE – Sempre que o objecto a representar
possa ser inscrito num paralelepípedo, é conveniente representá-lo primeiro e desenvolver o resto da
representação depois. Deste modo, assegura-se maior rigor gráfico e economia de traçado. A
representação do paralelepípedo faz-se como indicado para os cubos nos capítulos 5 e 6.
145
MÉTODO DAS COORDENADAS POLARES – Utiliza-se este método quando os pontos a
representar estão referidos a um sistema de coordenadas polares. Por exemplo, é dado um ponto P
pela distância à Origem do referencial, pelo azimute (ângulo que a projecção horizontal da distância
faz com o eixo coordenado x ) e pela altura (inclinação da distância relativamente ao plano
coordenado
α ). Não é, contudo, um sistema de utilização muito frequente.
MÉTODO DAS COORDENADAS RECTANGULARES – Utiliza-se este método quando os
pontos a representar podem ser referidos a um sistema de coordenadas rectangulares. Normalmente
o sistema de coordenadas está associado ao referencial da axonometria.
MÉTODO DAS VISTAS ORTOGONAIS6 – Este método corresponde a dispor no desenho, de
forma conveniente, as vistas ortogonais do objecto a representar, de tal modo que se possam extrair
delas directamente medidas para a axonometria. É de utilização conveniente sempre que a
quantidade de traçados não prejudique o desenho.
Veja-se em confronto a representação axonométrica através do método das coordenadas (à
esquerda) e através do método das vistas ortogonais (à direita) em alguns sub-sistemas
axonométricos.
• axonometria ortogonal métrica (fig. 19).
zr'
z
zr
z
Or'
Or
xr'
O
O
yr
xr
y
x
y
Or'
x
Or
xr'
yr'
Fig. 19
6
A designação MÉTODO DAS VISTAS ORTOGONAIS foi a que se encontrou para englobar um conjunto de métodos
que normalmente são apresentados de forma distinta. São estes, o método dos cortes, o método do falso rebatimento
e o método das plantas independentes. Como todos correspondem graficamente a afinidades, pode-se generalizar o
método.
Estes métodos podem ser encontrados no livro geometría descriptiva de F. Izquierdo Asenci, pp. 186 e 196. Este
autor designa o método dos cortes por método da translacção paralela.
146
Neste caso, ambos os métodos utilizam os rebatimentos dos planos coordenados.
No primeiro caso (à esquerda na figura 19), são marcados sobre os eixos rebatidos as
verdadeiras grandezas das coordenadas dos pontos, das quais, por meio do contra-rebatimento, se
encontram as projecções. Encontradas as projecções das coordenadas sobre os eixos axonométricos,
a axonometria é construída por meio de translacções e paralelismo.
No segundo caso (à direita na figura 19), os rebatimentos dos planos coordenados são
efectuados no sentido contrário ao utilizado no método anterior (para que a disposição das vistas fique
de acordo com os dados) aos quais acrescem translacções (segundo a direcção dos eixos
axonométricos; por exemplo, α rebatido sofre uma translacção segundo o eixo axonométrico
z ) para
que a disposição das vistas não se sobreponha à axonometria. A axonometria é produzida pelo
cruzamento da informação das duas vistas (podem utilizar-se três vistas).
• axonometria oblíqua métrica com o eixo coordenado
z paralelo ao quadro e direcção de
projecção ortogonal ao traço X .Y (fig. 20).
zr'
z
z
xr'
O
O
yr
xr
y
x
Or'
y
x
Or
xr'
yr'
Fig. 20
No método à esquerda na figura 20, apenas é necessário rebater o plano coordenado
Uma vez que o eixo coordenado z é paralelo ao quadro, tem-se
directamente as medidas segundo a direcção axonométrica
α.
C z = 1 pelo que se podem marcar
z.
No método à direita na figura 20, passa-se o mesmo que no caso anterior. É oportuno notar
que se tomou o eixo coordenado
z como charneira do rebatimento do plano coordenado β , que
depois sofreu uma translacção segundo o eixo axonométrico
y.
147
• axonometria militar (fig. 21)
z'
zr'
z
z
zr
xr'
O
O
x
x
y
y
Fig. 21
Em ambos os métodos, a representação desenvolve-se a partir da planta que fica em
verdadeira grandeza (se fosse a axonometria cavaleira, a representação desenvolver-se-ia a partir de
um alçado).
No método à esquerda na figura 21, considera-se z r qualquer (eixo coordenado z rebatido
para o quadro; note-se que se pode arbitrar que o quadro coincide com o plano coordenado
No método à direita na figura 21, considera-se o rebatimento do plano
plano coordenado
β
β'
α ).
(translacção do
y ) em torno da recta x' (translacção
segundo a direcção do eixo axonométrico
do eixo axonométrico x ). As cotas são colocadas sobre z ' (translacção do eixo axonométrico
z ) por
meio de uma afinidade estabelecida com a recta z ' r (eixo coordenado z ' rebatido), e por meio de
uma translacção segundo a direcção do eixo axonométrico
y são colocadas no eixo axonométrico
z.
A afinidade é definida em função do coeficiente C z .
• axonometria oblíqua convencional (fig. 22)
z'
z'
z
z
a
x'
O
O
x
x
y'
y
y
Fig. 22
148
Em ambos os métodos considera-se que a escala axonométrica
Ez = 1 .
No método à esquerda na figura 22, marcam-se directamente as medidas paralelas a z .
Para as medidas segundo x e y , consideram-se duas afinidades com uma recta a qualquer
passante pelo ponto O (nos termos da figura) definidas em função das escalas E y e
Ex .
As verdadeiras grandezas das coordenadas segundo x e y são marcadas na recta a , e por
meio das afinidades são transportadas para as projecções dos eixos.
No método à direita na figura 22, considera-se, por exemplo, uma translacção dos eixos
axonométricos x e z segundo a direcção do eixo axonométrico y (determinando as rectas x' e z ' ,
respectivamente), de tal modo que não fiquem sobrepostos à axonometria a produzir.
Alinhada com z ' , coloca-se a vista lateral esquerda que é colocada em posição afim
relativamente às rectas x ' e z ' . O eixo da afinidade é a recta z ' e a direcção da afinidade é
Ex .
estabelecida em função da escala
Procede-se de forma análoga com a vista frontal.
A axonometria é produzida cruzando a informação resultante das duas afinidades.
Há, contudo, um procedimento que permite unificar o método das vistas ortogonais. Porém,
esse procedimento implica uma ampliação, ou redução, das vistas consoante determinados critérios
(fig. 23).
z
A
B
O
C
A
B
D
uz
O
C
D
O
ux
uy
x
y
Fig. 23
149
Tem a vantagem de poder ser aplicado indiscriminadamente a qualquer axonometria
convencional.
Considerem-se os segmentos
u x , u y e u z marcados sobre os eixos axonométricos x , y e
z a partir de O . Os segmentos u x , u y e u z correspondem à imposição das escalas axonométricas
E x , E y e E z , donde u x , u y e u z corresponderem à mesma medida unitária U que se conhece
sobre o objecto a representar.
Conduzam-se rectas paralelas a y pelos extremos dos segmentos
uz e ux .
Por um ponto Oβ qualquer do prolongamento do eixo axonométrico y , conduz-se uma recta
perpendicular a y . Esta recta intersecta as rectas paralelas a y conduzidas pelos extremos de u z e
u x definindo duas medidas A e B , respectivamente.
Pelo extremo da medida A (oposto ao ponto Oβ ), na direcção de y , marque-se a medida
B.
Pelo extremo da medida B (oposto ao ponto Oβ ), na direcção de y , marque-se a medida
A no mesmo sentido em que se marcou a medida B .
As medidas A e B definem, duas a duas, triângulos rectângulos, cujas hipotenusas são
iguais e perpendiculares entre si.
Alinhe-se a vista lateral esquerda do objecto com as duas hipotenusas ampliando-a ou
reduzindo-a de tal forma que a a medida U corresponda à medida das hipotenusas.
Para a vista frontal, ou para a planta, procede-se de forma análoga.
A axonometria é produzida pelo cruzamento da informação das duas (ou três) vistas
ampliadas ou reduzidas.
150
Conclusão
151
Neste trabalho, embora se tenha procurado produzir um discurso global e actual sobre o tema
da representação axonométrica, fica o sentimento de que muitos aspectos foram apenas
superficialmente abordados.
Na Parte 1 foram expostos apenas os tópicos que permitem fazer uma leitura geral da história
da axonometria. Qualquer um dos capítulos desta parte permite maior desenvolvimento.
O capítulo 4 da Parte 2 permite um desenvolvimento exaustivo que se poderia constituir como
um trabalho independente.
É possível abordar a generalidade das questões enunciadas na Parte 2 através de outros
métodos algébricos que permitem, por exemplo, uma conexão com as questões da programação
informática. Neste sentido, pode colocar-se a questão da programação com vista a produzir softwares
que permitam a generalização das visualizações axonométricas.
A Parte 3 pode ser mais desenvolvida através da aplicação dos métodos de representação a
uma variedade maior de objectos de representação, explorando exaustivamente a aplicação da
afinidade.
É possível, a partir da Parte 3, desenvolver trabalhos independentes sobre a representação
axonométrica, por exemplo, em desenho à mão livre, ou em desenho assistido por computador.
Com efeito, penso que este trabalho permitiu a organização de um conjunto sólido de pistas
de trabalho para investigações futuras.
Se de alguma forma se abordou o tema com o intuito de produzir um discurso relativamente
fechado e acabado sobre a representação Axonométrica, verificou-se precisamente o contrário. Isto é,
verifica-se que este trabalho é “uma narrativa aberta”.
Bibliografia
Principal
• Aguilar, Leonildo T. De; Alguns conceitos geométricos, SPB Editores, 1997
• Asenci, F. Izquierdo; geometria descriptiva, Editorial Paraninfo, 24ª edição, 2000
• Aubert, Jean; Axonometrie - Théorie, Art et Pratique des perspectives parallèles; Brève histoire
orientée de l’axonométrie, Editions de La Villette, 1996
• Bois, Yve-Alain; “Avatars de l’áxonométrie”, Images et imaginaires d'architecture, Centre
Pompidou, Paris, March 1984, pp. 129 a 134.
• Consiglieri, Victor; A Morfologia da Arquitectura, 1920-1970, Vol.I, referência/ editorial estampa, 2ª
edição, 1995
• Costa, Manuel Couceiro da; Perspectiva e Arquitectura - uma expressão de inteligência no
trabalho de concepção, Dissertação de Doutoramento, Faculdade de Arquitectura da Universidade
Técnica de Lisboa, 1992
• Cunha, Luís Veiga da; Desenho Técnico, Fundação Calouste Gulbenkian, 11ª edição
• Deforge, Yves; Le Graphisme Technique - son histoire et son enseignement, Champ Vallon,
1981
• Farish, William; “On isometrical drawing”, Transactions of the Cambridge Philosophical Society,
Vol. 1, 1822
• Fasolo, Orseolo; Fondamenti geometrici della rappresentazione progettuale e tecnica
dell’Architettura, Tomo 1º, Edizioni Kappa, 1984
• Gelabert, Lino Cabezas; “O Ensino do Desenho Técnico”, boletim da aproged, nº 20, Março 2003
• Gournerie, Jules de la; Traité de géometrie descriptive, Gauthier-Villars Imprimeur Libraire, Paris,
3ª Edição, 1891
• Loria, Gino; Metodi di Geometria Descrittiva, Ulrico Hoepli editore-libraio della Real Casa, Milão,
1909
• Loria, Gino; Storia della Geometria Descrittiva - dalle origini sino ai giorni nostri, Ulrico Hoepli
editore-libraio della Real Casa, Milão, 1921
• Mannheim, Amédée; Cours de géometrie descriptive de l’École polytechnique, Gauthier-Villars
Imprimeur Libraire, Paris, 2ª edição,1886
• Mateus, Luís; “Axonometria por projecção ortogonal, determinação dos coeficientes de redução – via
analítica” , boletim da aproged, nº 19, 2002
• Mateus, Nuno Calado; “Representação Axonométrica e Geometria Descritiva”, boletim da aproged,
nº 20, Março 2003
• Monge, Gaspard; Geometría Descriptiva (edição fac-simile da tradução castelhana do original
Géométrie Descriptive pela Imprenta Real de Madrid, 1803), Colegio de Ingenieros de Caminos,
Canales y Puertos, Madrid, 1996
• Motta Pegado, Luís Porfírio; Curso de Geometria Descriptiva da Escola Polytechnica,
Typographia da Academia Real das Sciencias, 1899
• Panofsky, Erwin; A Perspectiva como Forma Simbólica (Trad. do original Die Perspektive als
“symbolische Form”, 1927, por Elisabete Nunes) edições 70, 1993
• Pijoan, J.; História da Arte, Publicações Alfa, 1989
• Queiróz, Augusto; Lições de Geometria Descritiva - Projecção e axonometria paralela,
ortogonal ou oblíqua, Vol. I, Edição de Fernando Machado & C.A, L.DA , Porto, 1931
• Ribeiro, Carlos Tavares; Geometria Projectiva - Conceitos, Metodologias, Aplicações,
Europress, 1991
• Scolari, Massimo; "Elements for a History of Axonometry", Architectural Design 55, 1985
• Sousa, Pedro Fialho de – Pinheiro, Carlos da Silva Desenho; TPU 55, Colecção Textos préuniversitários; 1980
• Winterle, Paulo; Vetores e Geometria Analítica, MaKron BooKs, 2000
Secundária
• Cundari, Cesare; Teoria della rappresentazione dello spazio architettonico, Edizioni Kappa, 1995
• Durer, Albrecht; Instruction sur la manière de mesurer (Trad. Francesa do original Underweysung
Der Messung,1525, por Jeannine Bardy e Michel Van Peene), Flammarion, Paris, 1995
• Fernandez, Angel Taibo; Geometría descriptiva y sus aplicaciones, tomo I, Escola Especial de
Ingenieros Industriales, Madrid, 1943
• Fetissov, A; A demonstração em Geometria (Trad. do original por Pedro Lima), Ulmeiro, 2001
• Hilbert, David; Fundamentos da Geometria, Gradiva, 2003
• Katz, Victor J.; A History of Mathematics, Addison Wesley, 2ª edição
• Meserve, Bruce; Fundamental Concepts of Geometry, Dover, 1983
• Nazaré, Luís de Menezes; Nova Enciclopédia Portuguesa, Ediclube, 1991
• Pozo, José Manuel; Geometría para la Arquitectura - Concepto y práctica, T6 Ediciones S.L.,
2002
• Ricca, Guilherme; Geometria Descritiva - Método de Monge, Fundação Calouste Gulbenkian,
1992
• Serrano, Pedro; Redacção e apresentação de trabalhos científicos, edição Relógio d´água,1996
• Souza, Jayme Rios de; Elementos de Geometria Projectiva, Porto Editora
Webgrafia
• Krikke, Jan; “Axonometry: A Matter of Perspective”, 2002, disponível em:
http://www.computer.org/cga/cg2000/pdf/g4007.pdf
• Krikke, Jan; “China, Japan and the Birth of Modernism:Eastern Aesthetics and the Reassertion of the
Female Principle” , 2002, disponível em:
http://home.uni-one.nl/olive.press/utapaper.htm#home
• Xavier, João Pedro; “A axonometria como método descritivo”, 2003, disponível em:
http://apus.uma.pt/~jkosta/FILES/jpx_axonometrias.htm
• “Axonometric projections - a technical overview”, 2002, disponível em:
http://www.compuphase.com/ axometr. htm# NEN2536
• Cornell University Library Historical Mathematics Monographs, 2003, disponível em:
http://historical.library.cornell.edu/math/index.html,
• Lista de Normas ISO, 2003, disponível em:
http://www.roymech.co.uk/Useful_Tables/Drawing/BS8888_kit1.html
Fonte das figuras
Figuras da Parte 1
• Fig. 1
Scolari, Massimo; "Elements for a History of Axonometry (vidé bibliografia)
• Fig. 2
Arte Erótica em Pompeia, 2003, disponível em:
http://www.worldhistory.com/wiki/E/Erotic-art-in-Pompeii-(low-quality).htm
• Fig. 3
Pijoan, J.; História da Arte, Vol 2, p. 251 (vidé bibliografia)
• Fig. 4
Olga’s Gallery, 2003, disponível em:
http://www.abcgallery.com/G/giotto/giotto-9.html
• Fig. 5
Op. Cit. (fig. 3), Vol. 5, p. 55
• Fig. 6
Aubert, Jean; Axonometrie, p. 133 (vidé bibliografia)
• Fig. 7
China the beautiful, 2003, disponível em:
http://www.chinapage.com/painting/guhongzhong/guhongzhong.html
• Fig. 8
idem (fig. 7), disponível em:
http://www.chinapage.com/painting/wangcm.html
• Fig. 9
Museu Nacional de Tóquio, 2003, disponível em:
http://www.tnm.jp/en/servlet/Con?processId=00&ref=2&Q1=&Q2=&Q3=&Q4=11
______4171_&Q5=&F1=&F2=&pageId=E15&colid=A10476
• Fig. 10
idem (fig. 9), disponível em:
http://www.tnm.jp/en/servlet/Con?&pageId=E16&processId=00&col_id=
A12091&img_id=C0010639&ref=2&Q1=&Q2=&Q3=&Q4=11______4171_&Q5=&F1
=&F2=
• Fig. 11
idem (fig. 7), disponível em:
http://www.chinapage.com/painting/jiaobingzhen/jiao06.html
• Fig. 12
Herbert Egenolf, 2003, disponível em:
http://www.egenolfgallery.com/Egenolf1/Yoshikazu02.html
• Fig. 13
Web Gallery of Art, 2003, disponível em:
http://gallery.euroweb.hu/index1.html
• Fig. 14
Bois, Yve-Alain; “Avatars de l’áxonométrie”, p. 131 (vidé bibliografia)
• Fig. 15
Op. Cit. (fig. 6), p. 126
• Fig. 16
ANU – Australian National University, 2003, disponível em:
http://rubens.anu.edu.au/htdocs/bytype/arch.sources/philibert/23869.JPG
• Fig. 17
Op. Cit. (fig. 6), p. 142
• Fig. 18
Desenhos de Arquitectura, 2003, disponível em:
http://o2.epandemic.com/fernando.lisboa/Cronologias/_Tempos/_15211616/_1521-1616.html
• Fig. 19
Op. Cit. (fig. 1), p. 78
• Fig. 20
Op. Cit. (fig. 1), p. 77
• Fig. 21
Op. Cit. (fig. 1), p. 77
• Fig. 22
Op. Cit. (fig. 1), p. 74
• Fig. 23
Durer, Albrecht; Instruction sur la manière de mesurer, p. 132 (vidé bibliografia)
• Fig. 24
Op. Cit. (fig. 1), p. 76
• Fig. 25
Monge, Gaspard; Geometría Descriptiva, prancha 1 (vidé bibliografia)
• Fig. 26
Op. Cit. (fig. 1), p. 75
• Fig. 27
idem (fig. 13)
• Fig. 28
idem (fig. 13)
• Fig. 29
Deforge, Yves; Le Graphisme Technique, p.69 (vidé bibliografia)
• Fig. 30
Farish, William; “On isometrical drawing”, prancha 2 (vidé bibliografia)
• Fig. 31
Gournerie, Jules de la; Traité de géometrie descriptive, pl. XLIX (vidé bibiografia)
• Fig. 32
Op. Cit. (fig. 31), pl. LII
• Fig. 33
Op. Cit. (fig. 6), p. 110
• Fig. 34
Op. Cit. (fig. 6), p. 116
• Fig. 35
Op. Cit. (fig. 6), p. 109
• Fig. 36
El Lissitsky, 2003, disponível em:
http://www.getty.edu/research/conducting_research/digitized_collections/
lissitzky/8_architecture/index.html
• Fig. 37
Estudo axonométrico de uma casa particular, 2003, disponível em:
http://o2.epandemic.com/fernando.lisboa/Cronologias/_Tempos/_19221996/_1922_vanDoesburg/_1922_vandoesburg.html
• Fig. 38
L’ouvre d’Alberto Sartoris, 2003, disponível em:
http://www.athenaeum.ch/oeuvre.htm
• Fig. 39
Fundación Proa, 2003, disponível em:
http://www.proa.org/exhibicion/hejduk/dibujos/hejduk-19.html
• Fig. 40
Anton, Howard; Calculus, Wiley, 6ª Edição, p.1066
• Fig. 41
Hawking, Stephen; O Universo numa Casca de Noz, Gradiva, p. 36
• Fig. 42
arcspace.com, 2003, disponível em:
www.arcspace.com/studio/ siza/pages/siza10_gif.htm
• Fig. 43
Buchanan, Peter; Renzo Piano building workshop, Vol. I, Phaidon, p.137
• Fig. 44
Op. Cit. (fig. 44), Vol. 4, p. 106
• Fig. 45
Konica Minolta, 2003, disponível em:
http://www.w3d.fr/scan3d/Vi%20910.htm
• Fig. 46
idem (fig. 45)
• Fig. 47
Jogo de computador SimCity4, 2003, disponível em:
www.gamingbliss.com/ simcity4pc.html
• Fig. 48
Jogo de computador Zeus, 2003, disponível em:
http://timebot.info/games/
Figuras da Parte 2 e da Parte 3
Todas as figuras das partes 2 e 3 destre trabalho foram produzidas pelo autor.
Anexos
i
Anexo da Parte 2
Cálculos relativos ao 4.2.1.
Considere-se a figura 10, do texto, que aqui é reproduzida com a inclusão de alguns elementos que
serão notados no decurso dos cálculos.
Or
Z (X
zr
Or
zr
1 ,Y1 )
z
C
B
O'(X
yr
xr
O',YO')
x
y
t =x
Y (0,0 )
xr
yr
t
X (A,0 )
A
t
Or
Sejam: O a origem do referencial tri-ortogonal, O ' a sua projecção ortogonal no quadro,
os ângulos axonométricos,
α̂ , β̂
e δˆ
A , B e C os lados do triângulo fundamental [ X , Y , Z ] , e π o ângulo
que C faz com A .
Da figura, pode escrever-se:
y r = YO e y = YO'
xr = XO e x = XO '
z r = ZO e z = ZO '
ii
• Começam por calcular-se os coeficientes de redução em função dos ângulos axonométricos,
isto é:
Cy =
y
= f (α , β , δ )
yr
Cx =
x
= f (α , β , δ )
xr
Cz =
z
= f (α , β , δ )
zr
Tome-se como ponto de partida o cálculo do coeficiente
Cy .
Da figura podem extrair-se as seguintes igualdades expressas e desenvolvidas no sistema de
equações:
⎧ y r2 + xr2 = y 2 + x 2 − 2 yx cos α
⎧−
⎪ 2
⎪ 2
2
2
2
2
2
2
⎪ z r + y r = z + y − 2 zy cos δ
⎪ z r = z + y −2 zy cos δ − y r
⎪ 2
⎪ 2
2
2
2
2
2
2
⎨ xr + z r = x + z − 2 xz cos β ⇔ ⎨ xr = x + z − 2 xz cos β − z r ⇔
⎪ y cos δ = x cos β
⎪−
⎪
⎪
⎪ y cos α = z cos β
⎪⎩−
⎩
⎧−
⎪−
⎪
⎪
⇔ ⎨ x r2 = x 2 + z 2 − 2 xz cos β − z 2 + y 2 − 2 zy cos δ − y r2 ⇔
⎪−
⎪
⎪⎩−
(
⎧
⎪
⎪
⎪−
⎪−
⎪⎪
⇔ ⎨ x r2 = x 2 − 2 xz cos β − y 2 + 2 zy cos δ + y r2 ⇔
⎪
y cos δ
⎪x =
cos β
⎪
⎪
y cos α
⎪z =
cos β
⎩⎪
)
iii
2
⎧ 2
⎛ y cos δ ⎞
⎛ y cos δ ⎞
2
2
⎟⎟ − 2⎜⎜
⎟⎟ y cos α
⎪ y z + xr = y + ⎜⎜
⎝ cos β ⎠
⎝ cos β ⎠
⎪
⎪−
⎪
2
⎪⎪
⎛ y cos δ ⎞
⎛ y cos δ ⎞⎛ y cos α ⎞
⎛ y cos α ⎞
2
⇔ ⎨ xr = ⎜⎜
⎟⎟ − 2⎜⎜
⎟⎟⎜⎜
⎟⎟ cos β − y 2 + 2⎜⎜
⎟⎟ y cos δ + y r2 ⇔
cos
β
cos
β
cos
β
cos
β
⎝
⎠
⎝
⎠⎝
⎠
⎝
⎠
⎪
⎪−
⎪
⎪−
⎪
⎪⎩
⎧ 2
2
2
⎪ yr + yr − y +
⎪
⎪−
⎪
⎪
⇔ ⎨ xr2 = y r2 − y 2 +
⎪
⎪−
⎪
⎪−
⎪
⎩
cos δ cos α
y 2 cos 2 δ
y 2 cos 2 δ
2
=
+
− 2y2
y
2
2
cos β
cos β
cos β
y 2 cos 2 δ
cos 2 β
Desenvolvendo agora a 1ª equação do sistema tem-se:
2 y r2 = 2 y 2 − 2 y 2
y2
cos δ cos α
y
cos δ cos α
⇔ r2 = 1 −
⇔
=
cos β
yr
cos β
y
Determinado o coeficiente
1
= Cy
cos δ cos α
1−
cos β
C y , podem, apenas por rotação de δ , α e β no segundo
membro da equação, determinar-se os coeficientes C x e C z . Os resultados estão indicados no texto.
iv
• Passa-se agora ao cálculo dos coeficientes de redução em função dos lados do triângulo
fundamental, isto é:
Cy =
y
= f ( A, B, C )
yr
Cx =
x
= f ( A, B, C )
xr
Cz =
z
= f ( A, B, C )
zr
Tome-se como ponto de partida o cálculo do coeficiente C z .
Da figura podem extrair-se as seguintes igualdades expressas e desenvolvidas no sistema de
equações:
⎧ y r2 + xr2 = A 2
⎧ xr2 = A 2 − y r2
⎧ A 2 − B 2 + z r2 = C 2 − z r2
⎧ A 2 − B 2 + z r2 = y r2
⎪ 2
⎪ 2
⎪
⎪
2
2
2
2
⇔ ⎨−
⎨ x r + z r = B ⇔ ⎨ x r = B − z r ⇔ ⎨−
⎪−
⎪ 2
⎪−
⎪y2 = C2 − z2
2
2
r
⎩
⎩ r
⎩ z r + yr = C
⎩
Daqui resulta:
B 2 − A2 + C 2
z =
2
2
r
(1)
Associe-se à figura um referencial cartesiano rectangular plano em que a recta tα coincide
com o eixo x , e
Y coincide com a origem. Neste sistema de coordenadas tem-se:
O'( X O ' ,YO ' )
Z ( X1 ,Y1 )
A( A, 0 )
v
em que:
(2)
X 1 = X o ' = C cos π
(3)
Y1 = C sin π
Podem escrever-se as seguintes igualdades
(4)
sin 2 π = 1 − cos 2 π
(5)
cos π =
A2 + C 2 − B 2
2CA
O declive da recta passante pelo lado B do triângulo é dado por:
m=
Y1
X1 − A
A representação algébrica da recta passante pelo segmento y (que é perpendicular ao lado
B do triângulo), será:
(6)
Y=
A − X1
X
Y1
Como o ponto O ' pertence a esta recta, pode escrever-se:
(7)
YO ' =
A − X1
X O'
Y1
A distância ZO ' , notada por z , pode ser expressa pela diferença de afastamentos entre os
pontos Z e O ' . Daqui resulta:
(8)
z = Y1 − YO '
vi
Substituindo (7) em (8) tem-se:
(9)
z = Y1 −
A − X1
X O'
Y1
Substituindo (2) e (3) em (9) vem:
z = C sin π −
A − C cos π
C cos π
C sin π
que desenvolvido resulta em:
(C − A cos π )
C − A cos π
⇔ z2 =
sin π
sin 2 π
2
(12)
z=
Substituindo (4) em (12) tem-se:
(13)
z2 =
(C − A cos π )2
1 − cos 2 π
Substituindo (5) em (13) tem-se:
2
2
⎛
⎛ 2
⎞⎞
⎜ C − A⎜ A + C − B ⎟ ⎟
⎜
⎟⎟
⎜
2CA
⎝
⎠⎠
z2 = ⎝
2
2
2
⎛ A +C −B ⎞
⎟⎟
1 − ⎜⎜
2CA
⎝
⎠
que desenvolvido fica:
2
(14)
⎛ C 2 − A2 + B 2 ⎞
⎜⎜
⎟⎟
2C
⎝
⎠
2
z =
2
2
2
⎛ A − B + C2 ⎞
⎟⎟
1 − ⎜⎜
2CA
⎝
⎠
2
vii
O coeficiente pode ser obtido dividindo ordenadamente (14) por (1):
2
z2
=
z r2
⎛ C 2 − A2 + B 2 ⎞
⎜⎜
⎟⎟
2C
⎝
⎠
2
2
2
⎛ A − B + C2 ⎞
⎟⎟
1 − ⎜⎜
2CA
⎝
⎠
B 2 − A2 + C 2
2
Desenvolvendo esta expressão tem-se:
Cz =
z
2(C 2 − A 2 + B 2 )
=A
zr
4 A2C 2 − A2 − B 2 + C 2
(
)
2
Por permutação cíclica parcial dos valores B e C , o coeficiente C z pode ser expresso por:
Cz =
z
2(C 2 − A 2 + B 2 )
=A
zr
4 A2 B 2 − A2 + B 2 − C 2
(
)
2
Os coeficientes C x e C y , os quais estão expressos no texto, podem ser obtidos por rotação
dos valores A , B e C .
i
Anexo da Parte 3
Exemplos de aplicação prática da representação axonométrica
Expor-se-ão neste anexo alguns exemplos de aplicações práticas de representações axonométricas
relacionadas com o contexto académico e com o contexto da prática da arquitectura.
• Desenhos de alunos da Faculdade de Arquitectura da Universidade Técnica de Lisboa
Fig. 1 – aluno Luís Mateus
Fig. 3 – aluna Marlene Roque
Fig. 2 – aluno Luís Mateus
Fig. 4 – aluna Sofia Daniela
ii
Fig. 5 – aluna Filipa Beirão
Fig. 6 – aluna Ariana Figueiras
Fig. 7 – aluno Sidel Lima
iii
• Desenhos no contexto de prática da Arquitectura
Fig. 8 – esquiço
Fig. 10 – visualização informática
Fig. 12 – excerto de desenho para construção
Fig. 9 – esquiço
Fig. 11 – visualização informática
Fig. 13 – desenho para construção