Detector de proximidade
-Introdução
Neste trabalho existem dois objectivos: um é determinar a distância de um
objecto ao nosso sensor, o outro é determinar a velocidade de aproximação
desse mesmo objecto.
O sensor de proximidade GP2Y0A02YK0F, da Sharp, como é possível
constatar na datasheet apenas contem três pinos, que são: Vcc (Supply
voltage), GND (Ground) e Vo (output terminal voltage).
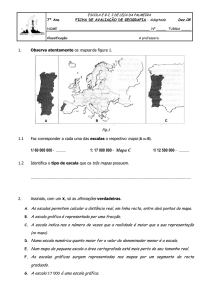
A onda de saída dá-nos uma tensão que é possível relacionar com a distância.
O gráfico a baixo descreve essa relação.
Fig.1- relação tensão/distância
-Realização experimental
Com o auxílio de uma fita métrica registamos para nove medidas de
distância dentro da gama de funcionamento do nosso sensor, (40 a 120 cm)
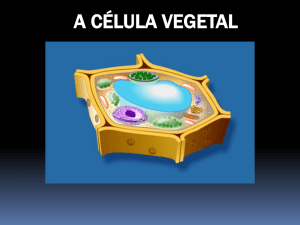
o valor da tensão correspondente. Com estes resultados e utilizando o Excel
conseguimos obter uma recta aproximada da recta original.
V (volts) L ( cm)
1,7
40
1,5
50
1,25
60
1,2
70
1
80
0,8
90
0,7
100
0,6
110
0,5
120
Fig.2 - Valores registados
Fig.3 - ligações efectuadas
Fig.4- realização experimental
-Breve descrição sobre o Labview
No labview obtivemos a onda de saída do sensor e de seguida utilizamos um
bloco que lia os valores de x do gráfico experimental (y=-0.015x+2,2278) e
a sua saída dava-nos a variação das distâncias relacionadas com a tensão
através da equação descrita anteriormente. Devido ao ruído tivemos de
introduzir dois filtros passa-baixo, um antes deste bloco com uma
frequência de corte muito pequena, e outro na placa de aquisição.
Para medirmos a velocidade introduzimos um bloco derivador à saída do
bloco medidor distâncias e obtivemos então a velocidade a que o objecto se
aproxima/afasta do nosso sensor. Introduzimos um velocímetro para melhor
observarmos estes valores.
y = -0,015x + 2,2278
1,8
1,6
1,4
1,2
1
Series1
Linear (Series1)
0,8
0,6
0,4
0,2
0
0
20
40
60
80
100
120
140
Fig.5- Recta que melhor aproxima os valores medidos(experimental)
-Análise de erros
Neste trabalho, como em qualquer trabalho de medição as medidas estão
sempre afectadas de erros. Estes erros tem base em vários factores como
o ruído eléctrico intrínseco dos componentes e instrumentos usados na
medição, a deficiente calibração do instrumento de medição, o ambiente que
rodeia o instrumento de medição, erros humanos provocando leituras
erradas, etc.
No nosso trabalho, especificamente, apenas vamos referir os erros da
cadeia de medição visto serem os únicos erros que podem ser determinados
matematicamente.
Erro de linearidade (sensor) - desvio entre pontos medidos (leituras
efectuadas) e a recta que melhor aproxima essas pontos. Para tal
calculamos os desvios (em módulo) entre os valores de tensão medidos e os
valores de Y da recta que melhor aproxima os pontos medidos (fig.5),
calculando depois o máximo desses desvios.
L ( cm)
40
50
60
70
80
90
100
110
120
Y (L)
1,6278
1,4778
1,3278
1,1778
1,0278
0,8778
0,7278
0,5778
0,4278
Fig.6
Desvio em
módulo
0,0722
0,0222
0,0778
0,0222
0,0278
0,0778
0,0278
0,0222
0,0722
fig.7- desvios
Como podemos observar na fig.7 o máximo dos desvios vão ser 0.0778 volts,
e é portanto este o valor do erro de linearidade.
Erro de quantificação
δ - Erro de quantificação
Vf – valor fim de escala (tensão de alimentação)
n - numero de bits da placa de aquisição
Q – quantum
Q=Vf/2^n=10/2^16=1.53*10^-4 volts
vplts
δ =Q/2=1.53*10^-4/2=7.63*10^-5 volts
O erro da cadeia de medição (total) é portanto:
Erro total = Erro de linearidade (sensor) + Erro de quantificação (A/D)=
=0.07787 volts