Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Cinemática dos Corpos Rígidos
Neste capítulo serão considerados apenas movimentos planos dos corpos ou conjuntos de corpos
rígidos. Os movimentos classificam-se em: translação, rotação e movimento plano geral.
Translação
O movimento de translação de um corpo rígido assemelha-se ao movimento da partícula. A cada
instante, todos os pontos do corpo (todas as partículas que o constituem) têm os vectores de
deslocamento, velocidade e aceleração exactamente iguais. A recta que liga dois pontos
arbitrários A e B (duas partículas A e B que pertencem ao conjunto de partículas que constituem
esse corpo) do corpo rígido mantem-se paralela em cada instante durante o movimento e por isso
as trajectórias de todos os pontos mantêm-se também paralelas. A trajectória percorrida pelo
corpo pode ser recta ou curva, ou seja a translação denomina-se rectilínea (figura abaixo à
esquerda- as trajectórias são rectas) ou curvilínea (figura abaixo à direita- as trajectórias são
curvas).
Qualquer ponto do corpo pode caracterizar o movimento de translação de maneira inequívoca e
igual. Seja rB/ A rB rA o vector que liga dois pontos arbitrários A e B do corpo rígido. Sendo este
vector constante ao logo do tempo, todas as derivadas segundo o tempo são nulas e por isso:
rB/ A rB rA vA vB
rB/ A rB rA aA aB
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
O vector do deslocamento que é o vector que liga a posição inicial de um ponto com a sua posição
final num dado instante de tempo, pode escrever-se como:
uA rA rA
Neste caso rA designou o vector de posição do ponto A na sua nova posição, ou seja A’. Das
relações acima vê-se que:
rB/ A rB rA rB/ A rB rA rA rA rB rB
ou seja os vectores de deslocamento são iguais
uA uB
As deduções apresentadas comprovam as definições ditas acima.
Rotação
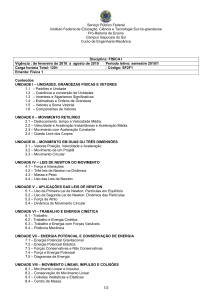
Durante o movimento de rotação, cada partícula A que constitui o corpo faz o movimento
circular, ou seja a trajectória da partícula A é uma circunferência com o raio definido pela distância
desta partícula ao centro de rotação C. Neste caso usam-se tal como na cinemática da partícula,
grandezas angulares, ou seja: o ângulo percorrido rad , a velocidade angular rad/s e a
aceleração angular rad/s 2 . Se a distância entre A e C for r o caminho percorrido
coincide com o arco s r , a intensidade da velocidade linear é v r r e a direcção do
vector correspondente é tangente à trajectória no sentido de progressão do movimento. A
intensidade da aceleração tangencial é at r r r e a direcção do vector correspondente
é tangente à trajectória no sentido de progressão do movimento quando acelera e no sentido
oposto quando desacelera. Existe ainda a componente normal da aceleração cuja intensidade é,
an 2 r
v2
e a direcção do vector correspondente é normal à trajectória (perpendicular à
r
tangente) com o sentido direccionado para o centro da rotação, independente do sentido do
vector at .
v
r
r
C
A
at A
r
2
C
acelerado
A
2r
C
at
desacelerado
Para distinguir claramente as duas velocidades, usa-se às vezes o adjectivo “linear”, ou seja a
velocidade v com a unidade [m/s] pode ser chamada, velocidade linear. Neste contexto a palavra
linear não tem nada a ver com alguma função linear, apenas representa o “recto”, tal como por
exemplo o termo, “mola linear”. O recto neste sentido não limita o movimento para o rectilíneo.
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Movimento plano geral
O movimento plano geral pode a cada instante separar-se em translação e rotação. Esta
separação pode aplicar-se ao movimento finito ou infinitesimal e aplica-se aos deslocamentos,
velocidades e acelerações. Para definir esta separação utiliza-se a definição do movimento
relativo, ou seja:
uA uB uA/ B
vA vB vA/ B
aA aB aA/ B
Estas equações podem ser utilizadas apenas estritamente no seu sentido vectorial. As equações
é fácil de decorar, imaginando que a equação aplica-se aos índices e que “/” representa a
substração, depois os índices dizem: A=B+A-B. O significado físico diz que o deslocamento (a
velocidade, a aceleração) do ponto A pode ser obtida usando o deslocamento (a velocidade, a
aceleração) do ponto B mais o deslocamento (a velocidade, a aceleração) relativo de A
relativamente ao B. No movimento plano geral quando os dois pontos pertencem ao mesmo
corpo (ou representam o mesmo movimento plano geral) o movimento relativo é representado
pela rotação, o que facilita a utilização das equações acima. Ou seja, o termo do movimento
relativo representa a rotação do ponto A em torno do ponto B, ou seja, o movimento em que o
ponto A está a circular e o ponto B permanece fixo e representa o centro de rotação. O ponto B
pode ser designado o ponto de referência, e o ponto A, cujas componentes as equações acima
determinam, pode ser chamado o ponto “de interesse”. Como já deduzido para os deslocamentos
no capítulo PTV, aos pontos de referência diferentes está associada a componente de translação
diferente, mas a componente de rotação será sempre igual. Visto a velocidade ser tangente à
trajectória, o CIR determinado para a definição dos deslocamentos elementares servirá também
para a definição de velocidades, porque as velocidades induzem em tempo infinitesimal os
deslocamentos infinitesimais nas mesmas direcções e sentidos. Por isso o CIR pode-se definir
como o ponto de velocidade nula e esta definição vai designar o mesmo CIR que foi utilizado no
capítulo PTV.
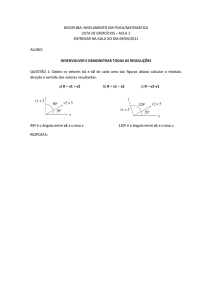
Nas figuras abaixo representam-se vários casos de separações dos movimentos.
A figura acima representa o movimento da barra encostada às duas superfícies. A sua posição
inicial é azul, e a final é verde. Escolhendo o CIR como o ponto de referência, o movimento pode
ser representado apenas como uma rotação em torno do CIR. Nota-se que o CIR muda a sua
posição a cada instante, e por isso o movimento finito tem que ser construído como a soma dos
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
movimentos infinitesimais. No entanto arbitrando qualquer outro ponto como de referência, o
movimento separa-se novamente em translação e rotação. A seta que corresponde ao
deslocamento de translação é diferente para pontos de referência diferentes, mas a contribuição
da rotação permanece igual. O movimento representado não precisa de ser infinitesimal, mas
pode ser finito.
O mesmo verifica-se para as esferas, rodas ou discos em movimento de rolamento sem
escorregamento.
O movimento representado na figura acima pode-se separar em translação e rotação, o ponto de
referência que se costuma usar mais frequentemente é o ponto A.
Translação
Rotação
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Problemas que envolvam apenas as velocidades
Barras
As barras ou os conjuntos de barras em princípio formam as estruturas reticuladas. Como
justificado acima, os problemas que envolvam apenas as velocidades resolvem-se da maneira
explicada no capítulo PTV. A diferença baseia-se em dois pontos: (i) a estrutura do enunciado será
já um mecanismo, ou seja, não se vai introduzir nenhuma libertação como no capítulo PTV; (ii) o
objectivo do cálculo será o campo de velocidades, e por isso 1 valor será dado e com a sua
implementação os restantes valores serão calculados. Isso é válido para mecanismos com 1 GDL,
porque, em analogia, o campo de deslocamentos infinitesimais de um mecanismo com 1 GDL é
definido via 1 parâmetro. Se a estrutura analisada fosse um mecanismo com mais GDL, mais dados
tem que ser definidos para se poder resolver o problema em causa.
Para descobrir o campo de velocidades, pode traçar-se o campo de deslocamentos infinitesimais
e substituir os deslocamentos pelas velocidades lineares e os ângulos de rotação pelas
velocidades angulares.
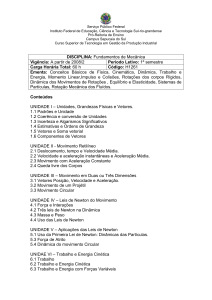
Problema
Sabendo que a barra AB tem a velocidade
angular AB 3rad/s no sentido anti-horário,
determine as velocidades angulares das barras
BD e DE.
Resolução:
1. Separação em corpos e a determinação dos CIRs
Corpo I: barra AB
Corpo II: barra BD
Corpo III: barra DE
Os apoios fixos correspondem aos CIRs absolutos
150
CIR2 ,
CIR2
o que define CIR1 e CIR3
CIR3
Rótulas internas correspondem aos CIRs relativos
o que define CIR12 e CIR23
O primeiro teorema permite traçar 2 rectas
(vermelhas tracejadas) que determinam a posição
CIR2
CIR12
150
do CIR2 . O CIR2 está posicionado na intersecção
destas rectas. Visto as rectas serem paralelas, o
CIR2 está posicionado no infinito na direcção das
rectas.
2. O campo de velocidades
Basta estabelecer as relações entre as velocidades angulares em
semelhança com os deslocamentos virtuais, onde o objectivo
era estabelecer as relações entre os ângulos de rotação.
CIR1
CIR23
vB
DE
150
vD
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
O campo de velocidades pode ser representado na figura ou em projecção. No entanto este
problema é tão simples que a visualização de campo de velocidades poderá ser feita directamente
na figura. Pode-se deduzir que:
vB AB150 vD DE 300
DE AB
1
1,5rad/s (horário)
2
BD 0 (corpo em translação)
Nota-se que o cálculo é feito na forma escalar e sem sinais. O sentido das velocidades
determina-se de acordo com o esboço. É importante realçar que o cálculo refere-se apenas a um
dado instante de tempo, em que as barras encontram-se na posição mostrada. Avançando o
movimento, a posição das barras (que teria de ser determinada pelas regras de movimento finito e
não infinitesimal) será diferente e certamente o CIR da barra BD não vai continuar no infinito, e
por isso a barra terá alguma velocidade angular. A determinação desta velocidade já não seria tão
fácil como no cálculo anterior. Nota-se no entanto que os CIRs das outras barras, AB e DE
permanecerão inalterados. Neste contexto faz sentido distinguir os CIRs absolutos fixos e móveis.
O CIR absoluto fixo é habitualmente aquele que foi determinado na posição de apoio fixo, não
muda a sua posição ao longo do movimento finito e por isso além de ter as propriedades do CIR,
coincide também com o centro do movimento de rotação do corpo a que pertence. O CIR
absoluto móvel é habitualmente determinado na intersecção de algumas rectas e por isso muda a
sua posição a cada instante.
No problema anterior determinaram-se as velocidades angulares das barras. Se forem solicitadas
algumas velocidades lineares, estas determinavam-se do mesmo modo como os deslocamentos na
parte de PTV. No problema anterior isso foi aplicado no cálculo das velocidades vB e vD .
Rodas (Discos, Esferas)
Os principais movimentos das rodas são o movimento de rotação e o movimento de rolamento.
Quando o rolamento ocorre sem o escorregamento, isso significa que as superfícies cujos pontos
entram em contacto avançam de tal modo que o comprimento percorrido, s, é igual. Isso significa
que não há movimento relativo entre esses pontos e por isso a velocidade do ponto de contacto
tem que ser igual. Se a roda rolar sobre uma superfície em repouso, a velocidade do ponto de
contacto é nula e para os efeitos de análise de movimento, este ponto coincidirá com o CIR
(absoluto). Se a roda rolar sobre uma superfície em movimento, ou sobre outra roda em
movimento, a velocidade do ponto de contacto é diferente de zero e para os efeitos de análise de
movimento, este ponto coincidirá com o CIR relativo.
É necessário distinguir o ponto de contacto, do ponto comum. O ponto comum, por exemplo uma
rótula interna, habitualmente pertence a dois corpos e por isso verifica as regras do movimento de
cada um dos corpos e os seus vectores de deslocamento, velocidade e aceleração são únicos. O
ponto de contacto em princípio representa 2 pontos distintos, e cada um pertence a um corpo
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
diferente. Quando não há escorregamento no lugar de contacto, as componentes tangenciais do
deslocamento infinitesimal, da velocidade e da aceleração são iguais. No caso do deslocamento
infinitesimal e da velocidade, não existem outras componentes do que as tangenciais, e por isso
pode-se dizer que o deslocamento infinitesimal e a velocidade no ponto de contacto são iguais.
Para as acelerações isso já não é verdade, a componente normal de aceleração dos dois pontos
que entram em contacto, em geral, será sempre diferente. Este facto é bastante importante e será
ainda referido na parte das acelerações.
Dois pontos de velocidades conhecidas
Da teoria apresentada no capítulo PTV, torna-se óbvio
que sabendo as velocidades de dois pontos que
pertencem ao mesmo corpo, é possível determinar a
posição do CIR tal como se visualiza na figura ao lado.
No entanto verifica-se que neste caso as intensidades
de velocidades são dependentes, porque tem que
verificar:
vA
ACIR
vB
B CIR
Quando os vectores de velocidades são paralelos, o corpo sofre uma translação e os vectores têm
que ter a mesma intensidade, porque o CIR correspondente está no infinito, na direcção
perpendicular às direcções das velocidades (figura abaixo, à esquerda). Apenas quando se verifica
que os pontos A e B estão colocados na mesma recta perpendicular aos vectores de velocidades,
as intensidades de velocidades podem ser diferentes (figura abaixo, à direita) e a velocidade
angular verifica:
vA
ACIR
vB
B CIR
Para completar, pode-se dizer que sabendo a velocidade no ponto A e a velocidade angular, o CIR
pode ser facilmente encontrado na recta perpendicular à velocidade, à distância d ACIR que
verifica
ACIR
vA
O mesmo é válido para os deslocamentos infinitesimais.
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Problema
O braço AB gira com uma velocidade angular de AB no sentido
horário. As rodas A e B, de raios rA e rB rolam sem escorregar
sobre si. Determine a velocidade angular da roda A para a qual:
a) a velocidade angular da roda B é de B no sentido antihorário;
b) o movimento da roda B é uma translação curvilínea.
Resolução
CIRB, AB
O mecanismo da figura é composto por 3 corpos, duas rodas e
uma barra. A roda A está apoiada, e por isso faz o movimento de
CIRB, A
rotação em torno do apoio, que coincide com o seu CIR
absoluto. Este ponto coincide também com o ponto em torno do
vB
qual roda a barra, é por isso também o CIR da barra. O centro da CIRAB CIRA
AB
roda B, onde há ligação entre a roda B e a barra, é o ponto
B
comum a dois corpos, ou seja o CIR relativo, e por isso a
A
velocidade neste ponto pode ser relacionada quer à roda B, quer
vC
à barra AB. Finalmente o ponto de contacto é o CIR relativo das
duas rodas.
O esboço dos movimentos foi afastado da figura das rodas para não se confundir. Neste caso não
foi projectado para alguma recta particular, porque sabendo os raios das rodas, não é vantajoso
visualizar o esboço em projecção com comprimentos projectados. Por isso, também as
velocidades visualizam-se nos seus valores reais e não projectados.
A posição deformada da roda A está representada pela recta vermelha. Esta recta de facto
corresponde à posição deformada do raio da roda assumindo um movimento infinitesimal iniciado
quando este raio estava alinhado com a barra. Igualmente a roda B, representada pela recta
verde, corresponde à posição deformada do raio da roda B. A barra está representada pela recta
azul. O esboço verifica as mesmas velocidades no ponto B, entre a roda B e a barra AB (rectas
verde e azul), e no ponto C, entre a roda A e a roda B (rectas vermelha e verde). Prolongando a
recta verde, encontra-se o ponto da velocidade nula da roda B. Ou seja, o CIR da roda B foi
encontrado da maneira explicada anteriormente e refere-se a dois pontos de velocidades
conhecidas. Os declives das rectas representam as velocidades angulares. Para se relacionar a
velocidade angular B mais facilmente, foi introduzida uma recta paralela à base do esboço.
Nota-se que a velocidade angular B introduzida, roda no sentido anti-horário, tal como exige a
alínea a). Por esta razão é possível relacionar os valores apenas da forma escalar. Do esboço lê-se
directamente:
ArA vC vB B rB
AB rA rB vB
ou seja
B
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
A
AB rA rB B rB
rA
Este resultado corresponde à alínea a).
b) Uma translação curvilínea significa que a roda B não sofre de rotação, ou seja B 0 e por isso
A
AB rA rB
rA
48mm
Problema
O braço ABC gira em torno do ponto C com velocidade angular de
40rad/s no sentido anti-horário. Dois discos de atrito A e B estão
pinados em seus centros ao braço ABC do modo mostrado na figura.
Sabendo que os discos rolam sem escorregar nas superfícies de
contacto, determine a velocidade angular:
a) do disco A;
b) do disco B.
30mm
Resolução
Seja D o ponto de contacto entre os
CIRA
vD
dois discos, E o ponto de contacto do
D C
disco B com a cavidade, e F a outra
vB B
A
F
E
ABC
extremidade do disco A. Na figura ao
ABC
A
B
CIRB
vA
CIRbarra
lado visualiza-se a forma deformada
do conjunto. A resolução começa por
A
representar a barra cuja velocidade
angular é dada. Faz-se a sua rotação
em torno do C no sentido anti-horário
(recta azul). O Ponto C corresponde
ao CIR da barra. Esta deformada
define as velocidades dos centros dos
dois discos.
Visto que o ponto E tem a velocidade nula, coincide com o CIR do disco B cuja velocidade angular é
B
vB ABC CB 40 18
24rad/s (horário)
rB
rB
30
A velocidade angular do disco B permite determinar a velocidade do ponto do contacto D com o
disco A. Visto que a velocidade do centro do disco A é definida pela rotação da barra, o disco A
possui dois pontos de velocidades conhecidas. Tal como explicado anteriormente, o CIR do disco A
está posicionado na intersecção da recta vermelha com a horizontal. O declive corresponde à
velocidade angular. Para facilitar o cálculo, é possível imaginar as rectas vermelhas tracejadas e
calcular
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
A
vD vA B DE ABC AC 24 60 40 24
200rad/s (anti-horário)
rA
rA
12
Problemas que envolvam as velocidades e as acelerações
Em primeiro lugar é necessário realçar, que em geral é sempre necessário resolver o campo de
velocidades antes de começar a lidar com o campo de acelerações, porque as velocidades definem
as componentes normais de aceleração. Apenas se o movimento de todos os corpos se iniciasse
do repouso, o campo de velocidades seria nulo e consequentemente poder-se-ia começar com as
acelerações.
Barras
Depois de determinar os CIRs das barras na parte de velocidades, é possível separar os CIRs em
fixos e móveis. Os CIRs fixos definem os centros de rotação. As barras com CIRs fixos fazem o
movimento de rotação (cada partícula que constitui a barra faz movimento circular) e por isso as
componentes normal e tangencial das suas acelerações são bem definidas (conhecem-se
numericamente, ou é possível exprimi-las usando grandezas incógnitas). Quando o CIR fixo está
posicionado no infinito, como por exemplo quando a barra tem o apoio externo na forma de
encastramento deslizante, a aceleração angular da barra é nula.
Quando existe um apoio móvel externo, ou as condições de movimento implicam a translação de
uma das extremidades da barra, o cálculo pode ser ajudado pelo facto de que neste lugar é
conhecida a direcção da aceleração total.
Rodas (Discos, Esferas)
Movimento de rotação
Durante o movimento de rotação o centro da rotação está fixo. As trajectórias de todos os pontos
são conhecidas e formadas pelas circunferências. O ponto fixo não tem a velocidade nem a
aceleração e corresponde ao CIR fixo. As acelerações e as velocidades determinam-se tal como
explicado anteriormente.
Rolamento sem o escorregamento sobre uma superfície recta
Durante o rolamento sem o escorregamento sobre uma superfície recta, o centro da roda é o
único ponto da roda que se move sobre uma trajectória recta. Esta trajectória é paralela à
superfície. Por isso o vector da velocidade é também paralelo à superfície e o vector da aceleração
tem apenas a componente tangencial, também paralela à superfície. Neste caso costuma-se
interpretar o movimento da roda como o movimento do centro da roda, ou seja quando se diz que
a roda move-se com uma certa velocidade (aceleração), assume-se que o centro da roda move-se
com esta velocidade (aceleração). Naturalmente outros pontos têm velocidades (acelerações)
diferentes e dependentes da posição da roda num dado instante do tempo.
O ponto de contacto com a superfície (somente nesse instante) tem que verificar as condições de
contacto sem o escorregamento, ou seja as condições de movimento relativo nulo, ou seja os
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
pontos de contacto da roda e da superfície têm que ter as componentes de velocidades iguais e as
componentes de aceleração tangenciais iguais. Mas como os pontos pertencem aos diferentes
corpos, podem ter acelerações normais diferentes. Realça-se que pode-se designar a componente
da aceleração como tangencial ou normal, apenas quando a trajectória é conhecida.
Superfície horizontal em repouso
B
a
v
r
C
A
O ponto de contacto A tem a velocidade nula e por isso corresponde ao CIR (móvel). As
velocidades determinam-se definindo primeiro a velocidade angular e depois usa-se o mesmo
procedimento como na determinação dos deslocamentos infinitesimais.
B
C
v
B
v
r
A CIR
vB
C
vB AB
A CIR
Realça-se que o vector de velocidade vB é perpendicular à recta AB e por isso não é
perpendicular à superfície da roda, porque a superfície da roda não representa a trajectória do
ponto B . (A superfície da roda corresponde à trajectória dos pontos de superfície apenas durante
o movimento de rotação em que o centro da roda coincide com o centro de rotação).
Usando o conceito das projecções, é possível determinar a velocidade do ponto B directamente
em componentes, horizontal e vertical. Para a componente horizontal basta imaginar a velocidade
do ponto posicionado na recta horizontal que passa pelo ponto B , que é o mais próximo do A .
Por outras palavras, todos os pontos posicionados na recta horizontal que passa pelo ponto B
têm a mesma componente horizontal de velocidade. Para a componente vertical basta imaginar a
velocidade do ponto na recta vertical que passa pelo ponto B , que é o mais próximo do A . Por
outras palavras todos os pontos posicionados na recta vertical que passa pelo ponto B têm a
mesma componente vertical da velocidade.
B
B
C
vB
vB, x r 1 cos
A CIR
vB
C
A CIR
vB, y r sin
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
ou seja
r 1 cos
vB
e
r sin
vB 2 r 2 1 cos 2 r 2 sin 2
2
r 2 1 cos AB
Sublinha-se que este conceito de projecção podia
ser generalizado, ou seja todos os pontos
posicionados sobre uma recta têm a componente
de velocidade na direcção desta recta igual. Este
valor equivale à multiplicação de com a
distância desta recta ao CIR. Este conceito já foi
utilizado no capítulo PTV.
Ainda é possível usar o cálculo vectorial
i
vB AB 0
r sin
r 1 cos v 1 cos
j
k
0
r sin v sin
r 1 cos 0
0
0
Nota-se que foi introduzido como negativo, porque a atribuição do vector usa a regra de mão
direita. O cálculo poderia ser efectuado directamente usando a simplificação que reduz o
resultado para 2D e em que a primeira multiplicação com a velocidade angular (cujo sinal foi
introduzido de acordo com a regra de mão direita) usa a segunda componente do vector AB
com o sinal inverso e a segunda multiplicação a primeira componente.
r 1 cos v 1 cos
r sin
r 1 cos
vB AB
r sin r sin v sin
r 1 cos
Nota-se que o cálculo anterior podia justificar-se via propagação de velocidades com o ponto de
referência A , ou seja vB vA vB/ A vB/ A .
É ainda possível usar a propagação de velocidades com o ponto de referência coincidente com o
centro da roda C :
v 1 cos
v
r sin v
r cos
vB vC vB /C v,0 CB
0
r cos 0
r sin
v sin
Aceleração do ponto do contacto
Sabe-se que o ponto do contacto A tem a componente tangencial de aceleração nula. Usando a
propagação de acelerações:
0 a r
a A aC a A/ C
2
a A, n 0 r
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Neste caso simples usaram-se directamente as componentes de aceleração normal e tangencial
nas posições das componentes, vertical e horizontal.
C
a
C
C , fixo
a
a A, n
a
A
r
A
2r
A
Na primeira figura visualizam-se as acelerações conhecidas, ou seja sabe-se a aceleração do centro
e a aceleração tangencial do ponto de contacto. Pode haver aceleração normal no ponto A , mas
o seu valor a A, n ainda é desconhecido. O movimento separa-se em translação com C e a rotação
em torno do C . A translação visualiza-se na segunda figura, todos os ponto inclusive A e C têm
a mesma aceleração do C , ou seja a . A rotação visualiza-se na terceira figura. O ponto C está
fixo e o ponto A faz o movimento de rotação. Como o movimento é de rotação, sabe-se a
trajectória e podem-se usar as componentes da aceleração na forma tangencial e normal tal como
definidos para o movimento circular. Para isso é preciso saber a velocidade angular , que teve
que ser determinada na parte de velocidades. Falta ainda a aceleração angular , e por isso
introduz-se como um valor desconhecido e arbitra-se o seu sentido. Verifica-se que as
componentes no ponto A são representadas na equação acima. A equação é vectorial e tem duas
incógnitas, resolvendo vem: a / r e aA,n 2 r . Pode-se assim concluir que, sabendo as
componentes de aceleração total em 2 pontos distintos que pertencem ao mesmo corpo (fazem
o mesmo movimento), pode-se determinar a aceleração angular do modo semelhante como se
costuma determinar a velocidade angular. Para as acelerações é necessário usar as
componentes que são perpendiculares à recta que une estes dois pontos. A aceleração angular
corresponde ao ângulo assim definido.
Aceleração do ponto B
Determinação gráfica via propagação de acelerações: A separação em translação com C e a
rotação em torno do C , costuma ser a separação mais vantajosa, porque o movimento de
rotação depois coincide com o movimento de rotação em torno do centro da roda, em que as
componentes de aceleração são bem conhecidas.
C
B aB ?
C
a
2r B
r
B
a
a
C , fixo
A
A
A
a r cos r sin a 1 cos r sin
aB aC aB / C
2
2
0 r sin r cos a sin r cos
2
2
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
O cálculo vectorial segue o mesmo raciocínio
a
a
r sin
2 r sin
aB aC aB / C CB 2 CB
0
0
r cos
r cos
a r cos 2 r sin a 1 cos 2 r sin
2
2
0 r sin r cos a sin r cos
B
Superfície horizontal em movimento
r
v
a
C
Admite-se que uma roda role sem escorregar sobre uma
superfície que também está em movimento. A roda movev/2 A a/2
se com a velocidade v para a direita e acelera pelo a .
A superfície move-se na mesma direcção com a velocidade v / 2 e desacelera pelo a / 2 .
Pretende-se determinar a velocidade e a aceleração no ponto B da roda.
Velocidades
O ponto de contacto A não tem a velocidade nula, por isso é necessário determinar o CIR (móvel)
usando o procedimento definido para 2 pontos de velocidades conhecidas. As velocidades
determinam-se definindo primeiro a velocidade angular e depois usa-se o mesmo procedimento
como na determinação dos deslocamentos infinitesimais.
B
v
C
A
r
CIR
B
v
2r
C
vB
vB CIR B
v/2
A
CIR
A posição do CIR foi determinada usando a semelhança dos triângulos. Realça-se novamente que
o vector de velocidade vB é perpendicular à recta CIR B e por isso não é perpendicular à
superfície da roda porque esta não representa a trajectória do ponto B .
Usando o conceito das projecções, é possível determinar a velocidade do ponto B directamente
em componentes, horizontal e vertical. Para a componente horizontal basta imaginar a velocidade
do ponto posicionado na recta horizontal que passa pelo ponto B , que é o mais próximo do CIR .
Por outras palavras, todos os pontos posicionados na recta horizontal que passa pelo ponto B
têm a mesma componente horizontal de velocidade. Para a componente vertical basta imaginar a
velocidade do ponto na recta vertical que passa pelo ponto B , que é o mais próximo do CIR . Por
outras palavras, todos os pontos posicionados na recta vertical que passa pelo ponto B têm a
mesma componente vertical da velocidade. Ou seja
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
r 2 cos
vB
e
r sin
vB 2r 2 2 cos 2r 2 sin 2 r 5 4cos CIR B
2
Ainda é possível usar o cálculo vectorial, que neste caso corresponde a propagação de velocidades
com o ponto de referência igual ao CIR :
i
vB CIR B 0
r sin
r 2 cos
j
k
0
r sin
r 2 cos 0
0
O cálculo poderia ser efectuado directamente usando a simplificação que reduz o resultado para
2D:
r sin r 2 cos
vB CIR B
r 2 cos r sin
implementando
r sin
CIR B
r 2 cos
É ainda possível usar a propagação de velocidade, por exemplo, com o ponto de referência
coincidente com o centro da roda:
v
2 r
r sin r 2 cos
vB vC vB / C CB
0
0
r cos r sin
Também pode ser utilizado outro ponto de referência, por exemplo o ponto A :
r sin r 2 cos
v / 2
r
vB v A v B / A
AB
0
0
r 1 cos r sin
Aceleração do ponto do contacto
Sabe-se que o ponto do contacto A tem a componente tangencial de aceleração definida. Usando
a propagação de acelerações:
a / 2 a r
a A aC a A/ C
2
a A, n 0 r
Neste caso simples usaram-se directamente as componentes de aceleração normal e tangencial
nas posições das componentes, vertical e horizontal.
C
a
C
a A, n
a/2 A
a
a
A
C , fixo
r
2r
A
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Na primeira figura visualizam-se as acelerações conhecidas, ou seja, sabe-se a aceleração do
centro e a aceleração tangencial do ponto de contacto. Pode haver aceleração normal no ponto
A , mas o seu valor a A,n ainda é desconhecido. O movimento separa-se em translação com C e a
rotação em torno do C . A translação visualiza-se na segunda figura, todos os pontos, inclusive A
e C têm a mesma aceleração do C , ou seja a . A rotação visualiza-se na terceira figura. O ponto
C está fixo e o ponto A faz movimento de rotação. Como o movimento é de rotação, sabe-se a
trajectória e podem usar-se as componentes da aceleração na forma tangencial e normal, tal
como definidos para o movimento circular. Para isso tem que saber-se a velocidade angular ,
que teve que ser determinada na parte de velocidades. Falta ainda a aceleração angular , e por
isso introduz-se como valor desconhecido e arbitra-se o seu sentido. Verifica-se que as
componentes no ponto A são representadas na equação acima.
A equação é vectorial e tem duas incógnitas, resolvendo vem:
1,5a / r
e
aA,n 2 r . Ou seja, a aceleração angular
C
determinou-se usando duas componentes de aceleração conhecidas,
que actuam na direcção perpendicular à recta que une os pontos A
e C , tal como se visualiza na figura ao lado.
a
a A, n
a/2 A
Aceleração do ponto B
Determinação gráfica via propagação de acelerações: a separação em translação com C e a
rotação em torno do C , costuma ser a separação mais vantajosa, porque o movimento de
rotação depois coincide com o movimento de rotação em torno do centro da roda, em que as
componentes de aceleração são bem conhecidas.
C
B aB ?
a
C
B
a
2r B
r
a
C , fixo
A
A
A
v2
2,5
a
cos
sin 5
2
a r cos 2 r sin
r cos r sin
4
r
aB aC aB /C
3
2
v2
2
0 r sin r cos
r sin r cos
1,5a sin cos
4r
Foi utilizado que v 2r e 1,5a / r .
O cálculo vectorial em princípio segue o mesmo raciocínio
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
a
a
r sin
a r cos 2 r sin
2 r sin
aB aC aB / C CB 2 CB
2
0
0
r cos
r cos 0 r sin r cos
v2
2,5
a
co
s
sin 5
2
a r cos 2 r sin
r cos r sin
4
r
3
2
2
0 r sin r cos
1,5a sin v cos r sin 2 r cos
4r
Superfície inclinada em movimento
B
Admite-se que uma roda role sem escorregar sobre uma
superfície inclinada que também está em movimento. A
roda move-se com a velocidade v para baixo e acelera
pelo a / 2 . A superfície move-se na direcção oposta com
a velocidade v / 2 e desacelera pelo a . Determine a
velocidade e a aceleração no ponto B da roda.
C
v
a/2
r
v/2
a A
Resolução
Velocidades
O ponto de contacto A não tem a velocidade nula e por isso é necessário determinar o CIR
(móvel) usando o procedimento definido para 2 pontos de velocidades conhecidas. As velocidades
determinam-se definindo primeiro a velocidade angular e depois usa-se o mesmo procedimento
como na determinação dos deslocamentos infinitesimais.
B
B
v
3v
2r
C
CIR
A v/2
vB CIR B
v
CIR
referencial
usado
A v/2
A posição do CIR foi determinada usando a semelhança dos triângulos. Realça-se novamente que
o vector de velocidade vB é perpendicular à recta CIR B e por isso não é perpendicular à
superfície da roda porque esta não representa a trajectória do ponto B .
Usando o conceito das projecções, é possível determinar a velocidade do ponto B directamente
em componentes; neste caso será mais vantajoso determinar as componentes na direcção
paralela e perpendicular à superfície. Para a componente paralela à superfície basta imaginar a
velocidade do ponto posicionado na recta paralela que passa pelo ponto B , que é o mais próximo
do CIR . Por outras palavras, todos os pontos posicionados na recta paralela que passa pelo ponto
B têm a mesma componente paralela à superfície de velocidade. Para a componente
perpendicular à superfície basta imaginar a velocidade do ponto na recta perpendicular à
superfície que passa pelo ponto B , que é o mais próximo do CIR . Por outras palavras, todos os
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
pontos posicionados na recta perpendicular que passa pelo ponto B têm a mesma componente
perpendicular à superfície da velocidade. Ou seja
r 2 / 3 cos
vB
e
r sin
2
13 4
2
vB 2 r 2 cos 2 r 2 sin 2 r
cos CIR B
9 3
3
Ainda é possível usar o cálculo vectorial
i
vB CIR B 0
r sin
j
k r 2 / 3 cos
0
r sin
r 2 / 3 cos 0
0
O cálculo poderia ser efectuado directamente usando a simplificação que reduz o resultado para
2D (este cálculo corresponde à propagação de velocidades com o ponto de referência coincidente
com o CIR ):
r sin
r 2 / 3 cos
vB CIR B
r sin
r 2 / 3 cos
É ainda possível usar a propagação de velocidades, por exemplo, com o ponto de referência
coincidente com o centro da roda:
v
v
r sin v r cos r 2 / 3 cos
vB vC vB / C CB
r sin
0
0
r cos 0 r sin
Na relação anterior foi substituído v 2r / 3 . Pode ser utilizado qualquer outro ponto de
referência, por exemplo o ponto A :
r sin r 2 / 3 cos
v / 2
v / 2
vB v A vB / A
AB
r sin
0
0
r 1 cos
Aceleração do ponto do contacto
Sabe-se que o ponto do contacto A tem a componente tangencial de aceleração definida. Usando
a propagação de acelerações:
a a / 2 r
a A aC a A/ C
2
a A, n 0 r
a / 2 a A, n
C , fixo
C
C
a A
a/2
A
a/2
2r
r A
Na primeira figura visualizam-se as acelerações conhecidas, ou seja, sabe-se a aceleração do
centro e a aceleração tangencial do ponto de contacto. Pode haver aceleração normal no ponto
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
A , mas o seu valor a A,n ainda é desconhecido. O movimento separa-se em translação com C e a
rotação em torno do C . A translação visualiza-se na segunda figura, todos os pontos, inclusive A
e C têm a mesma aceleração do C , ou seja a / 2 . A rotação visualiza-se na terceira figura. O
ponto C está fixo e o ponto A faz movimento de rotação. Como o movimento é de rotação,
sabe-se a trajectória e podem-se usar as componentes da aceleração na forma tangencial e
normal, tal como definidos para o movimento circular. Para isso é necessário saber a velocidade
angular , que teve que ser determinada na parte de velocidades. Falta ainda a aceleração
angular , e por isso introduz-se como valor desconhecido e arbitra-se o seu sentido. Verifica-se
que as componentes no ponto A são representadas na equação acima.
A equação é vectorial e tem duas incógnitas, resolvendo vem:
a / 2r e aA,n 2 r . Ou seja, a aceleração angular
C
a / 2 a A, n
determinou-se usando duas componentes de aceleração conhecidas,
que actuam na direcção perpendicular à recta que une os pontos A
e C , tal como se visualiza na figura ao lado.
a A
Aceleração do ponto B
Determinação gráfica via propagação de acelerações: a separação em translação com C e a
rotação em torno do C costuma ser a separação mais vantajosa, porque o movimento de rotação
depois coincide com o movimento de rotação em torno do centro da roda, em que as
componentes de aceleração são bem conhecidas. Agora torna-se mais vantajoso usar as
componentes, horizontal e vertical.
aB ?
a/2
B
B
r
B r
2
a/2 C
a/2 C
C , fixo
A
A
aB aC aB / C
A
1
a
2 a cos r r 1 cos 2 1 cos
2
2
1 a sin r r sin r a sin 9 v 2
2
2
4r
Foi utilizado que v
2
r e a 2 r .
3
O cálculo vectorial em princípio segue o mesmo raciocínio
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
1
1
a cos
2 a cos
0
2
2
2 0
aB aC aB / C
CB CB
r
r
1 a sin
1 a sin
2
2
1
a
2 a cos r 0 r 1 cos 2 1 cos
2
2
1 a sin 0 r r sin r a sin 9 v 2
2
2
4r
Pode concluir-se que em todos os casos a componente de aceleração perpendicular à superfície
no ponto de contacto foi de 2 r .
Os casos diferentes diferiram entre si pelos valores de e , em função de velocidade v ou
aceleração a do centro da roda, usando o raio da roda r .
Para determinação dos valores angulares e , foi utilizado um conceito que pode ser
generalizado.
Dois pontos de velocidades conhecidas
Já foi referido o caso da figura ao lado à
esquerda, de onde segue:
v A vB
AB
Na equação acima as velocidades entram
com a sua intensidade. A subtracção (ou
a soma) faz se de acordo com a actuação
real que também define o sentido de
velocidade angular.
Considerando alguma projecção pelo ângulo , tal como na outra figura à direita, pode-se
concluir:
vA cos vB cos vA, p vB , p
d
AB cos
Ou seja para determinar a velocidade angular é suficiente conhecer 2 componentes paralelas de
velocidades de 2 pontos do mesmo corpo. Depois a diferença escalar de intensidades das
projecções (ou a soma no caso da actuação oposta) divide-se pela distância de rectas que definem
a direcção destas componentes e passam pelos pontos considerados.
Dois pontos de acelerações conhecidas
Ao contrário dos deslocamentos infinitesimais e
das velocidades, as acelerações em 2 pontos do
mesmo corpo podem ter sentidos e intensidades
quase arbitrárias. Existe apenas uma condição que
será definida em seguida.
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Para resolver a aceleração angular e a velocidade angular, torna-se
mais vantajoso usar o referencial especificado na figura ao lado.
Usando a propagação de acelerações e arbitrando no sentido antihorário:
aB aA aB / A
2
aB, x aA, x
AB
a
a
B , y A, y
AB
ou seja
a a
a a
B , y A, y e 2 A , x B , x
AB
AB
Por outras palavras, basta projectar as acelerações na direcção
perpendicular à recta que une os dois pontos e retirar a aceleração
angular como o ângulo infinitesimal. Realça-se no entanto que isso
não significa que estas componentes projectadas são as
componentes tangenciais, ou seja, as trajectórias destes dois pontos
não são na direcção perpendicular à recta que une os dois pontos.
Para a determinação da velocidade angular, a projecção faz-se à recta
que une os dois pontos. Visto que a equação define o quadrado da
velocidade angular, a subtracção tem que ser positiva, o que em
termos geométricos significa que as componentes não podem
“alargar” a recta que une esses dois pontos. Ou seja imaginando que
as projecções representam os “deslocamentos” dos pontos, o
“comprimento” novo não pode ser maior.
Este conceito é o mais simples e não é possível fazer a generalização
como no caso das velocidades.
Barras com velocidades e acelerações dadas
Vários problemas que consideram as estruturas reticuladas começam por definir a velocidade
angular e a aceleração angular de uma das barras. É aconselhável perceber que um dado para
velocidades e um dado para acelerações tem que ser definido para mecanismos com 1GDL. Os
valores angulares são os mais fáceis porque a sua definição é completamente arbitrária e não
pode entrar em contradição. Mas poder-se-ia definir uma velocidade de 1 ponto e uma
aceleração de 1 ponto (diferente ou igual). Estes valores já não são arbitrários e têm que
obedecer às leis de cinemática.
Considera-se uma barra com apoio fixo e outra com encastramento deslizante. Recorda-se que
estes apoios retiram 2GDL e por isso definem exactamente a posição do CIR da respectiva barra
(não dão apenas uma indicação da posição do CIR, como por exemplo o apoio móvel). Por isso
estas barras podem ser consideradas como um mecanismo único ou como uma parte de
mecanismo. De qualquer maneira a discussão que se mostra em seguida é valida para ambos os
casos.
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Velocidade
(1) Único movimento que a barra ao lado pode fazer é
rotação em torno do apoio. A velocidade tem que ser
paralela à recta que une o ponto em que a velocidade actua
e o CIR (sentido foi arbitrado, podia ser oposto).
(2) Único movimento que a barra ao lado pode fazer é
translação na direcção da libertação no apoio, por isso o
vector de velocidade tem que actuar na mesma direcção,
porque é a direcção de trajectória de cada ponto da barra
(sentido foi arbitrado, podia ser oposto).
Aceleração
(1) Único movimento que a barra ao lado pode fazer é
rotação em torno do apoio. O CIR é fixo e por isso
representa o centro de rotação. O vector da aceleração
(vermelho) tem que estar desviado para o centro de
rotação, porque depois de o decompor na sua componente
tangencial (azul) e normal (verde), o sentido da
componente normal tem que ser direccionado para o
centro. A intensidade depende da velocidade e no limite
pode ser nula.
(2) Único movimento que a barra ao lado pode fazer é
translação na direcção da libertação no apoio, por isso o
vector de aceleração tem que actuar na mesma direcção. A
aceleração angular é nula.
Problema
Sabendo que a barra AB tem a velocidade
angular AB 3rad/s no sentido anti-horário,
A CIR
A CIR
v
v
B
CIR,
A
AB
B
CIR,
A
0
v
v
B
B
AC
AC
an
a
B
at
C,
A
a
B
an
a
B
at
at
AB
C,
A
a
0
B
150
e aceleração angular AB 2rad/s2 no sentido
horário, determine as acelerações angulares
das barras BD e DE.
Resolução:
1. O campo de velocidades já foi determinado num problema
anterior. Para as acelerações é importante resumir as
velocidades angulares (sentidos são agora indiferentes)
v
vB
DE
150
DE 1,5rad/s , BD 0
vD
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
2. Para as acelerações, é importante definir primeiro os
corpos com movimentos bem definidos, que são
habitualmente os corpos com apoios externos que indicam o
tipo de movimento. As barras AB e DE têm um apoio fixo, ou
seja CIR fixo, ou seja, o centro de rotação, e é possível
determinar as componentes normais e tangenciais de
aceleração nas rótulas que ligam estas barras à barra BD. No
AB AB
2
AB
AB
total há 2 incógnitas, BD e DE . Para estas incógnitas é
AB
possível escrever uma equação vectorial de propagação de
acelerações que corresponde a duas equações escalares.
aD aB aD/ B , onde aD/ B equivale às componentes de
rotação do ponto D em torno do ponto B, como se visualiza
ao lado.
A equação pode ser representada assim:
2
DE
DE
DE DE
2
DE
DE
DE DE
B, fixo
BD
2
BD
BD 0
AB AB
DE
BD BD
BD BD
2
AB
AB
Na realidade as projecções podem ser determinadas directamente usando o mesmo conceito
como anteriormente, ou seja
AB AB
DE
2
DE
DE DE
BD 320
2
AB
AB
BD 240
Substituindo os valores numéricos e comparando as componentes verticais
9
300 9 150 BD 320 675 1350 BD 320 BD 6,33rad/s 2
4
e horizontais
DE 300 2 150 BD 240 DE 6,06rad/s2
Concluiu-se que BD 0 apesar de BD 0 . Isso porque a translação da barra BD só se verifica
naquele mesmo instante. Também pode-se concluir que BD 0 do facto que o CIR da barra BD é
móvel, o que prova que para as acelerações não é possível usar o conceito igual ao das
velocidades baseado em CIRs.
A equação vectorial usada no cálculo também pode ser representada da seguinte maneira
aD aB aD/ B
A forma acima diz que, seguindo a estrutura de um lado para o outro, a aceleração do ponto de
interesse seguinte (D) equivale à aceleração do ponto anterior (B) mais a aceleração que
representa a rotação do troço BD, em que o ponto anterior é fixo e o ponto de interesse roda.
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Assim chega-se às acelerações do ponto D de dois lados, mas os valores naturalmente têm que ser
os mesmos, porque representam a aceleração do único ponto. Graficamente ´´e possível separar a
estrutura no ponto D.
AB AB
2
AB
AB
BD BD
2
AB
AB
2
DE
DE
AB AB
DE DE
Comparando as componentes no ponto em que a estrutura foi separada, e usando novamente o
conceito das projecções para a componente inclinada, obtêm-se as equações acima. Ainda existe a
possibilidade de efectuar cálculos vectoriais, mas neste caso simples não se justifica.
Problema
Na posição mostrada, a barra AB tem uma
velocidade angular de 4rad/s no sentido
horário e a aceleração angular nula. Determine
as velocidades angulares e as acelerações
angulares das barras BD e DE.
Resolução
1. Velocidades
A resolução pode ser auxiliada
implementação dos CIRs.
Da semelhança dos triângulos:
via
500
h
800
h
e
400 400 x 400 400 x
Resolvendo:
h 615,38mm
CIR1
x 92,31mm
As velocidades angulares são possíveis
resolver usando as projecções, para a vertical
ou para a horizontal. Realça-se que as
relações entre as velocidades angulares
mantém-se iguais, no entanto a velocidade
visualizada, é naturalmente a projecção da
velocidade ou seja a respectiva componente.
CIR2
I
CIR3
III
h
II
x
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Assim no esboço ao lado visualiza-se a
componente horizontal das velocidades dos
pontos B e D, que é igual, e no esboço em
baixo, as componentes verticais das
velocidades dos pontos B e D que são
diferentes. Assim:
CIR1
AB
CIR2
AB 800 BDh DE 500
I
ou analogamente:
h
BD
CIR3
AB 400 BD 400 x e DE 400 BD 400 x
II
Resolvendo:
x
BD 5, 2rad/s , DE 6, 4rad/s
2
BD
BD
2
AB
AB
BD
2
BD
2
AB
800
2
AB
400
BD
DE
vD , y
vB , y
DE
2
DE
DE
DE DE
2
DE
500
DE 400
2
DE
DE
BD BD
2
AB
AB
Em componentes
BD BD
vB, x vD, x
AB
2. Acelerações
As barras AB e DE têm o CIR fixo que
representa o centro de rotação, o que
permite determinar as acelerações via
componentes normais e tangenciais. Aplicase a propagação de acelerações de B para D e
a estrutura separa-se no ponto D.
Ou seja:
BD BD
DE
III
2
BD
BD
2
AB
AB
BD
2
DE
400 DE 500
Ou seja comparando as componentes horizontais
16 400 5, 22 800 DE 500 6, 42 400 DE 2,304rad/s 2 (anti-horário)
e verticais
16 800 BD 800 2,304 400 6, 42 500 BD 10,752rad/s 2 (anti-horário)
Resolução usando o cálculo vectorial (para o referencial 0xy na posição habitual, onde a posição
da origem é indiferente)
400
800
400
AB
, BD , ED
800
0
500
DE DE
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Recorda-se que as acelerações angulares foram arbitradas nos sentidos positivos e por isso para o
cálculo vectorial simplificado basta trocar as componentes do respectivo vector e mudar o sinal da
componente que está depois na primeira posição.
800
500
2 400
2 400
aB 0
AB
, aD DE
DE
400
800
400
500
0
2 400
2 800
aD aB aD / B AB
BD BD
800
800
0
ou seja
0
500
2 400
2 800
2 400
AB
BD BD DE
DE
800
800
0
400
500
400
0
500
2 800
2 400
16
BD 5, 2 DE
6, 4
800
800
0
400
500
Verifica-se que o sistema das equações é igual ao anterior e por isso vai dar a mesma solução. Nas
expressões foi utilizada a já referida simplificação do produto externo, na forma
i
at r 0
rx
j k
0 ry , rx , 0
ry 0
Ou seja directamente:
r
at y
rx
O conceito das projecções
O conceito das projecções foi referido várias vezes neste capítulo e também no capítulo PTV. Este
conceito simplifica de maneira significativa todos os cálculos desta parte da matéria e em vez de
fazer cálculos vectoriais permite fazer um cálculo baseado em esboços na forma escalar, em que a
maior parte dos sinais é deduzida dos esboços. É aconselhável resumir este conceito mais uma
vez.
O conceito pode ser explicado directamente através de figuras ou do cálculo vectorial
Foi definido que, por exemplo, vA OA d y , d x , onde OA d x , d y . Ou seja
vA, x d y e vA, y d x
y
Isso significa que para definir a componente
horizontal de velocidade, traça-se uma recta
horizontal pelo ponto onde a velocidade actua e
detecta-se a distância desta recta ao ponto em
torno do que se efectua a rotação (centro de
rotação, CIR); o sentido determina-se no esboço.
vA
vA, x
dx
v A, y
A
dy
O
x
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Da figura vê-se que:
vA, x vA sin OA sin OA
dy
OA
d y
o que novamente confirma a relação deduzida.
Analogamente, para a componente de velocidade
vertical traça-se uma recta vertical pelo ponto
onde a velocidade actua e detecta-se a distância
desta recta ao ponto em torno do que se efectua a
rotação; o sentido determina-se no esboço. Da
figura vê-se que:
vA, y vA cos OA cos OA
y
vD
vB, x
vA, x
vD , x D
vC
vB
vA
vC , x
A
C
B
dy
O
x
dx
d x
OA
o que novamente confirma a relação deduzida.
Em consequência, todos os pontos posicionados numa recta têm a componente de velocidade na
direcção desta recta igual, porque a distância da recta usada para o cálculo não se altera para
diferentes pontos posicionados nessa recta.
Este procedimento pode ser igualmente utilizado para deslocamentos virtuais (multiplicação pelo
ângulo de rotação) e componentes de aceleração tangencial (multiplicação pela aceleração
angular).
Para completar, recorda-se que as componentes normais de
aceleração podem projectar-se do modo mais simples,
como se vê na figura. De qualquer maneira, visto as
componentes tangenciais e normais serem perpendiculares,
a distância usada para a projecção da componente normal é
sempre oposta à que foi usada para a componente
tangencial, ou seja usa-se directamente a componente do
y
dx
anA, x
anA
vector OA na direcção da componente
dx
2dx
OA
d
anA sin 2 OA sin 2 OA y 2 d y
OA
anA, x anA cos 2 OA cos 2 OA
anA, y
O
A
anA, y
dy
Uma verificação rápida via produto interno confirma que os vectores são ortogonais:
T
2
d x
d y
2
2
anA atA 2
d x d y d x d y 0
d
d
x
y
Ângulos finitos e infinitesimais
Na resolução dos problemas é necessário ter cuidado para não misturar ângulos finitos e
infinitesimais. Os ângulos finitos usam-se para o cálculo dos parâmetros geométricos da estrutura
e assim a sua implementação é habitualmente via funções trigonométricas. Os ângulos
x
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
infinitesimais representam os ângulos de rotação infinitesimais, velocidades angulares ou
acelerações angulares que nunca fazem argumentos de uma função trigonométrica.
O conceito das projecções permite transferir o ângulo
infinitesimal como se faz para os ângulos finitos, ou seja
os ângulos delimitados pelas semi-rectas mutuamente
ortogonais são iguais.
Na primeira figura ao lado visualiza-se
uma barra com troço vertical e
horizontal (cinzenta) e a sua posição
deformada (vermelha). Na outra figura
mostra-se a mesma barra (cinzenta) com
a sua posição deformada (vermelha),
mas neste caso a posição não deformada
tem uma rotação finita definida pelo
ângulo . Setas verdes representam os
deslocamentos totais, linhas verdes
ajudam definir os ângulos rectos. Setas
pretas definem directamente as
componentes
dos
deslocamentos
infinitesimais.
h
h
h
d
d
h sin
h cos
h cos
h sin
h cos d sin
h sin d cos
Casos em que a aceleração angular de um corpo do mecanismo considerado é nula
A aceleração angular é nula quando o corpo efectua translação rectilínea ou curvilínea. A indicação
deste movimento não se pode definir analisando apenas um dado instante, mas o movimento
completo. Ou seja, quando o CIR de algum corpo que pertence ao conjunto de corpos estiver
posicionado no infinito num dado instante, isso não assegura o movimento de translação e
consequentemente a aceleração angular nula. O CIR daquele corpo tem que estar no infinito ao
longo do movimento. O CIR posicionado no infinito na mesma direcção verifica-se por exemplo no
caso da barra com encastramento deslizante. Neste caso a translação é rectilínea.
CIR,
A
v
B
A
v
CIR,
C,
A
a
B
B
A
a
C,
B
Sebenta de Disciplina DCR, Zuzana Dimitrovová, DEC/FCT/UNL, 2016
Quando ao longo do movimento o CIR estiver posicionado no infinito mas mudar a sua direcção, a
translação é curvilínea. Isso verifica-se por exemplo no caso do corpo ligado a duas barras
rotuladas de mesmo comprimento, tal como se comprova na figura abaixo.
h
I
1 3
CIR,
L
2 0
II
h
instante dado III
1h
1h 2 L
3h
2h
2h
2h
1 3
2 0
CIR,
L
II
h
h
outro
instante
I
III
1 3
1h
2 0
2h
2 L
1h
2h
3h
2h
1 3
2 0
De qualquer maneira é necessário realçar que não é indispensável decorar os casos
mencionados, porque o cálculo das acelerações, usando as regras explicadas anteriormente,
permite rapidamente obter a mesma conclusão.
Nota final
Foi realçado várias vezes que não é possível utilizar os CIRs para a determinação das
acelerações. Isso foi justificado pelo facto, que no CIR absoluto móvel a aceleração não é nula, e
por isso não se verificam as propriedades dos CIRs tal como para deslocamentos infinitesimais e
velocidades. No entanto, também não existe algum outro ponto particular, que facilitava a
determinação das acelerações. Nos casos particulares, em que num dado instante as
velocidades angulares são nulas, o movimento está determinado pelas componentes
tangenciais que obedecem as mesmas regras de determinação como os deslocamentos
infinitesimais e velocidades. Neste caso (e somente neste caso) a determinação de acelerações
pode ser ajudada pelos CIRs.