4 – MECÂNICA CELESTE E GEODÉSIA
4.1 – INTRODUÇÃO
4.1.1 – Geodésia Celeste - Objetivo científico e operacional
4.1.2 – Métodos geométricos e dinâmicos
4.2 – MOVIMENTO ORBITAL
4.2.1 – Forças centrais. O problema dos dois corpos
4.2.2 – Velocidade crítica
4.3 – ELEMENTOS ORBITAIS
4.3.1 – Leis de Kepler
4.3.2 – Geometria da órbita normal no plano
4.3.3 – Geometria da órbita normal no espaço
4.3.4 – Elementos orbitais
4.4 – PERTURBAÇÕES
4.4.1 – Variação nos elementos orbitais
4.4.2 – Classificação das perturbações
4.5 – RETROSPECTO
4.6 – ANÁLISE DO MOVIMENTO ORBITAL NO PLANO
4.7 – ANÁLISE DO MOVIMENTO ORBITAL NO ESPAÇO
4.8 – COORDENADAS URANOGRÁFICAS TOPOCÊNTRICAS DE SATÉLITE E
OBSERVADOR
4.1.1 – OBJETIVO CIÊNTIFICO – Determinar a forma e dimensões da Terra.
Como ilustração cita-se que o achatamento terrestre foi determinado 3 anos após
o lançamento do 1° satélite artificial, com maior precisão que todas as
determinações
anteriores
por
métodos
astronômicos,
geométricos
e
gravimétricos.
OBJETIVO OPERACIONAL – Obtenção da posição absoluta ou relativa de
pontos na S.F. da Terra, obtenção de parâmetros definidores do campo gravífico
da Terra, etc.
Os satélites são considerados ativos quando emitem sinais que permitam o
posicionamento, são considerados passivos quando são utilizados como refletores
de sinais (radar, laser) ou são fotografados contra o firmamento.
4.1.2 – MÉTODOS GEOMÉTRICOS – São aqueles que conduzem a posição
absoluta ou relativa de pontos na S.F.
MÉTODOS DINÂMICOS – São aqueles que conduzem a parâmetros
definidores do campo gravífico.
4.2.1 – O estudo do movimento de uma partícula relativamente à outra, quando
entre estas partículas existe apenas atração gravitacional, é denominado de
“problema dos dois corpos”. Tanto as partículas como os corpos esféricos,
apresentam a mesma estrutura de campo gravitacional, ou seja, superfícies
equipotenciais são superfícies esféricas concêntricas (potencial esférico). Tal fato
nos permite, admitindo a Terra como esférica, tratar um satélite como submetido a
uma força central, dirigida para o CG da Terra (CG do sistema ≅ CG da Terra) e
tratar ambos como partículas. A órbita resultante do satélite submetido a uma
força central é dita normal ou kepleriana.
Existem outras forças que atuam sobre satélites artificiais, que os afastam
de órbitas normais. Tais forças são analisadas no tópico 4.4, como perturbações.
4.2.2 – Sendo vc a velocidade crítica, demonstra-se que:
v c2 = (2kM) / r0
(4.2.2.1)
sendo
r0 – posição inicial do satélite na órbita
M – massa da Terra
Se v c é a velocidade com a qual um satélite artificial inicia sua órbita, então se:
a) v 0 = v c / 2
⇒ órbita circular
b) v c > v 0 > v c / 2
⇒ órbita elíptica
c) v 0 = v c
⇒ órbita parabólica
d) v 0 > v c
⇒ órbita hiperbólica
4.3.1 – Para os satélites artificiais, pode-se escrever as leis de Kepler como:
1° - Lei das Órbitas – Os satélites artificiais descrevem órbitas elípticas em
torno da Terra, das quais o C.M. desta ocupa um dos focos.
2° - Lei das Áreas – O raio vetor de um satélite artificial, em qualquer trecho
da órbita, descreve áreas iguais em tempos iguais.
3° - Lei dos Períodos – Os quadrados dos períodos
de revolução dos
satélites artificiais, são proporcionais aos cubos dos semi-eixos maiores de suas
órbitas.
Tais leis são aplicáveis, supostas as órbitas como normais.
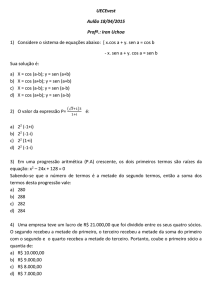
4.3.2 – Coordenadas do satélite S
( x, y) – coordenadas cartesianas planas
( f, r) – coordenadas polares
a2e2 = a2 − b2
b2 = a2 − a2e2
b = a 1− e2
f – anomalia verdadeira;
E – anomalia excêntrica
r – raio vetor ou distância radial
a – semi-eixo maior;
b – semi-eixo menor;
e – excentricidade
e2 = a2 − b2 / a2
(
)
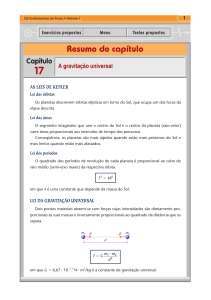
4.3. 3 – α − ascensão reta; δ − declinação; γ − ponto vernal
C.M. – Centro de massa da Terra; PNC – Pólo Norte Celeste
(X 0 , Y0 , Z 0 ) − Sistema Uranográfico Cartesiano
4.3.4 –
Elementos
Denominação
Definem
a
semi-eixo maior
tamanho e forma da órbita
e
excentricidade
Ω
ascensão reta do nodo ascendente
posição do plano orbital no
i
inclinação
espaço
ω
argumento do perigeo
orientação da elipse no espaço
T0
época de passagem pelo perigeo
posição do satélite na órbita
4.4.1 – A função potencial para o movimento de um satélite pode ser escrita como:
V = V0 + R
(4.4.1.1)
sendo V0 = (kM) / r (pot. esf.)
(4.4.1.2)
e R um potencial perturbador cuja derivada direcional fornece a componente da
força perturbadora na direção da derivada.
Os elementos orbitais normais, conhecidos para uma época t1 são:
a1 , e1 , i1 , ω1 , Ω 1 e n1
( n1 = n1 (T0 et 1 ) )
Estes elementos sofrem variações devido a perturbações. Se estas
variações são conhecidas na época t1
.
.
.
.
.
.
a1 , e1 , i1 , ω1 , Ω 1 e n1
então, pode-se determinar os elementos orbitais para uma época t2, desde que
esta variação possa ser considerada constante no intervalo t1 a t2. No NNSS (Navy
Navigation Satellite System) tais variações são atualizadas a cada 12h.
4.4.2 – Quanto às causas, as perturbações classificam-se em:
a) Gravitacionais - Terrestre; Luni-Solar; Marés e relativistas
b) Não-gravitacionais – Atrito atmosférico; Eletromagnética, Pressão de radiação
Quanto ao período, classificam-se em:
.
a) Seculares - Δ (el. Orb.) = E = constante
b) Longo período - E = E(ω)
.
.
c) Curto período - E = E(f )
.
.
Descrição das perturbações
Terrestre: Anomalias no campo gravífico terrestre, devidas à distribuição de
massas não ser constante, à falta de uniformidade na densidade da litosfera e a
variações temporais no campo gravífico.
Luni-Solar: Conjugação das forças exercidas por estes astros sobre o satélite. A
resultante varia de instante a instante.
Marés: Causam redistribuição de massas, alterando o campo gravífico.
Relativista: Variação da massa do satélite devido à variação da velocidade orbital.
Atrito atmosférico: Força que se opõe ao movimento do satélite, tendendo a
aumentar com o tempo, devido ao decréscimo do período orbital, tendendo a
regiões sempre com maior densidade.
Eletromagnética: Interação eletromagnética do satélite com o campo magnético da
Terra. O satélite é carregado eletrostaticamente pelos raios cósmicos, em seu
movimento orbital.
Pressão de radiação: O satélite é sujeito à radiação direta ou indireta do Sol.
4.5 – Os satélites podem ser empregados para atender aos objetivos científicos e
operacionais da Geodésia Celeste.
Os satélites podem ser ativos e passivos.
Quanto ao método de utilização, este pode ser geométrico ou dinâmico.
O problema do movimento de um satélite artificial no campo gravífico da
Terra, pode ser deduzido ao “problema dos dois corpos”, entendendo-se que o
movimento real do satélite difere deste movimento normal em torno do C.M. da
Terra, devido a existência de perturbações que serão traduzidas na forma de
alterações nos elementos orbitais normais.
4.6 – A terceira Lei de Kepler tem a expressão:
n 2 a 3 = k (M + m)
(4.6.1)
onde
n – velocidade angular média
a – semi-eixo maior da órbita
k – constante gravitacional universal
M – massa do primário
M – massa do secundário
No caso do movimento de satélite artificial no campo gravífico da Terra,
tem-se M>>m, então:
n 2 a 3 = kM
(kM = 3986005 x 108 m3 s-2 – Moritz 197)
ou
n=
(kM / a )
3
(4.6.2)
Sendo M uma anomalia média, que corresponderia à anomalia verdadeira,
se o satélite s movesse com velocidade constante em módulo, então:
n = 2π / P = M / (t − T0 )
(4.6.3)
sendo
P – período do satélite
t – (TU) da época considerada
T0 – tempo de passagem pelo perigeo
Da (4.6.3) vem:
M = n(t − T0 )
(4.6.4)
A descrição completa do movimento elíptico pode ser feita com a equação
de Kepler:
M = E − e sen E
ou
E = M + e sen E
(4.6.5) Solução iterativa
Da figura tem-se:
x = r cos f = a cos E − ae = a(cos E − e )
y = r sen f = b sen E =
(a
2
)
(
)
− a 2 e 2 sen E = a 1 − e 2 sen E
4.7 – Obs:
1
0
0
R1 (θ) = 0 cos θ sen θ
0 − sen θ cos θ
cos θ 0 − sen θ
R 2 (θ) = 0
1
0
sen θ 0 cos θ
cos θ sen θ 0
R 3 (θ) = − sen θ cos θ 0
0
0
1
Com relação à figura apresentada no item 4.3.3 tem-se: (geometria da
órbita normal no espaço)
x = a(cos E − e );
(
)
y = a 1 − e 2 sen E;
z=0
Pode-se sobrepor o referencial (x, y, z) ao referencial (X, Y, Z) desde que:
1°) Gire-se o referencial (x, y, z) em torno do eixo z de um ângulo (-ω).
(Então x ≡ linha do nodo ascendente).
2°) Gire-se o referencial (x, y, z) em torno do eixo x de um ângulo ( -i).
(Então z ≡ Z).
3°) Gire-se o referencial (x, y, z) em torno do eixo z de um ângulo ( -Ω).
(Então x ≡ X; y ≡ Y; z ≡ Z)
De forma geral:
XS
x
YS = R3 (− Ω)R1(− i)R3 (− ω) y
ZS
z=0
celestes geocêntricas
plano orbitais
Sendo
Então
(X
X = r cos δ cos α
Y = r cos δ sen α
r =
Z = r sen δ
sen α = Z / r = Z /
2
0
+ Y 02 + Z 02
tg α = Y / X
)
(X
2
0
+ Y 02 + Z 02
)
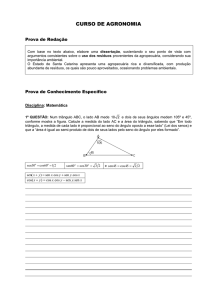
4.8 – (ϕ, λ, H) – coordenadas geodésicas
e – achatamento
P0 – observador
X0
(N + H ) cos
(N + H ) cos
ϕ cos λ
Y0 =
ϕ sen λ
⎡ N ⎛⎜ 1 − e 2 ⎞⎟ + H ⎤ sen ϕ
Z0
⎢⎣ ⎝
⎥⎦
⎠
Coordenadas geocêntricas do observador
(4.8.1)
r0 cos δ 0 cos α 0
X0
Y 0 = r0 cos δ 0 sen α 0 ≅ R 3 (S G ) Y0
Z0
r0 sen δ 0
Z0
X0
(4.8.2)
↓
coord. uranográficas
geocêntricas do observador
Então as coordenadas topocêntricas do satélite serão:
*
XS
XS
X0
YS* = y S − Y 0
*
ZS
Z0
ZS
coord.
coord.
(4.8.3)
coord.
top. do geoc. do geoc. do
satélite satélite
observador
com:
r* =
(X
*2
+ Y *2 + Z *2
tg * α = Y * / X *
senδ * = Z * / r *
)