ENGENHARIA CIVIL
MECÂNICA II
2º ANO / 1º SEMESTRE – 2002/2003
Prof. João Miranda Guedes (DEC)
MOVIMENTO VIBRATÓRIO DE SISTEMAS DISCRETOS DE 1 G.L.
(Complemento aos acetatos da disciplina de Dinâmica de Estruturas, capítulos 3 e 4
disponiveis na web)
1
Introdução
Estudo do movimento vibratório de sistemas discretos cuja estrutura permite que o seu
movimento possa ser caracterizado através da análise apenas do deslocamento de um
ponto numa direcção.
Serão analisados sistemas com e sem amortecimento, entendendo-se por amortecimento
uma caracteristica viscosa do material que impõe ao sistema discreto uma força
proporcional, mas de sinal contrário, à velocidade do sistema.
Finalmente, será estudado o movimento destes sistemas em vibração livre, i.e. o
movimento para além do instante final de actuação de qualquer força exterior sobre o
sistema, e o movimento provocado pela acção de uma força exterior harmónica.
2
Caracterização de Sistemas Discretos de 1 G.L. (SD1)
Um sistema discreto é um sistema tal que o seu movimento pode ser descrito através do
movimento de um número discreto de pontos i, (ui(t), vi(t), wi(t)). A cada função fi(t) que
caracteriza o movimento dum ponto numa direcção, corresponde um grau de liberdade.
Estes sistemas contrapoem-se aos sistemas contínuos cujo movimento é descrito através
de funções contínuas nos pontos do sistema, (u(x, y, z, t), v(x, y, z, t), w(x, y, z, t)), i.e.
funções contínuas no tempo e no espaço da estrutura.
Um Sistema Discreto de 1 Grau de Liberdade (SD1) é um sistema que, para além de
discreto, o seu movimento é descrito pelo movimento de apenas um ponto numa direcção,
i.e. através apenas de uma função f(t).
Vibração de Sistemas Discretos de 1 G.L.
1
3
Formulação das Equações do Movimento de SD1
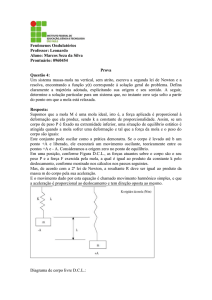
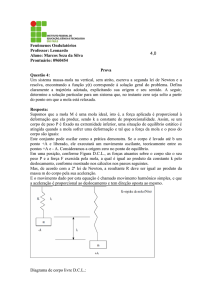
Seja o seguinte SD1 constituido por um veículo rígido de massa m [kg] ligado ao exterior
por um amortecedor de amortecimento c [kg/s ou Ns/m] e uma mola de rigidez k [kg/s2 ou
N/m], submetido à acção da força f(t) [N ; s] que lhe imprime um movimento de translação
na direcção horizontal u(t) [m ; s]:
y
u(t)
k
fe(t)
m
f(t)
fa(t)
fi(t)
f(t)
c
f i (t ) = m ⋅ [− a (t )] = −m ⋅ u&&(t )
f a (t ) = c ⋅ [−v (t )] = −c ⋅ u& (t ) → f i (t ) + f a (t ) + f e (t ) + f (t ) = 0
f e (t ) = k ⋅ [− u (t )] = −k ⋅ u (t )
m ⋅ u&&(t ) + c ⋅ u& (t ) + k ⋅ u (t ) = f (t )
Sendo fi, a força de inércia, fa a força do amortecedor ou de amortecimento e fe a força da
mola ou elástica do SD1. Os parametros m, c e k são caracteristicas do sistema, da sua
forma e do seu material. O valor k da rigidez corresponde à força que é necessário impor
de forma estática, i.e. sem velocidade nem aceleração, na direcção do grau de liberdade u
para que o sistema se desloque de uma unidade (u = 1m) nessa direcção. O valor c do
amortecimento corresponde à força que o amortecedor exerce sobre o sistema na direcção
do grau de liberdade u quando o sistema se desloca a uma velocidade de uma unidade (v
= 1m/s) nessa direcção.
Determinar o movimento u(t) de um SD1 corresponde, por isso, a resolver uma equação
diferencial linear de 2ª ordem de coeficientes constantes. A sua resolução implica o
conhecimento de dois valores ou constantes de integração, normalmente o deslocamento
e a velocidade no instante t = 0s.
m⋅
4
d 2u (t )
du (t )
+c ⋅
+ k ⋅ u (t ) = f (t )
2
dt
dt
Movimento de SD1 sem Amortecimento
4.1 Em vibração livre
O movimento em vibração livre de um SD1 sem amortecimento corresponde à resolução
da equação:
Vibração de Sistemas Discretos de 1 G.L.
2
m⋅
d 2u (t )
+ k ⋅ u (t ) = 0
dt 2
que apresenta duas soluções:
u (t ) = A ⋅ cos(w ⋅ t ) ∧ u (t ) = B ⋅ sin (w ⋅ t )
sendo a solução geral, designada por solução complementar, a soma das duas:
u (t ) = A ⋅ cos(w ⋅ t ) + B ⋅ sin (w ⋅ t )
A substituição de qualquer uma das duas soluções na equação resulta na imposição da
relação:
w =
k
m
Sendo o valor w [rad/s] designado por frequência angular do sistema. Note-se que a
solução é uma função periódica de período T [s] ou frequência f [Hz]:
u (t + Τ ) = u (t ) → w ⋅ (t + Τ ) − w ⋅ t = 2 ⋅ π
Τ=
2 ⋅π
w
⇔ f =
w
1
=
Τ 2 ⋅π
Através das condições iniciais do movimento: o deslocamento e a velocidade no instante t
= 0s, determina-se o valor das constantes A e B:
t =0 →
u (0 ) = A ⋅ cos(0 ) + B ⋅ sin (0 )
u& (0 ) = − A ⋅w ⋅ sin (0 ) + B ⋅w ⋅ cos(0 )
u (t ) = u (0 ) ⋅ cos(w ⋅ t ) +
u& (0 )
⋅ sin (w ⋅ t )
w
que pode ainda escrever-se com o seguinte aspecto:
u (t ) = C ⋅ cos(w ⋅ t − α )
C =
(u (0))
2
2
u& (0 )
+
w
u& (0 )
w
∧ tan α =
u (0 )
4.2 Solicitado por acções harmónicas
Seja agora o movimento de um SD1 sem amortecimento submetido à acção de uma força
sinusoidal f(t) de amplitude po e frequência angular w :
m⋅
Vibração de Sistemas Discretos de 1 G.L.
d 2u (t )
+ k ⋅ u (t ) = p o ⋅ sin w ⋅ t
dt 2
( )
3
Neste caso, para além da solução em vibração livre ou complementar, existe a solução
particular da equação que resolve o valor não nulo do segundo membro:
( )
u p (t ) = U ⋅ sin w ⋅ t
Substituida esta solução na equação do movimento determina-se a constante U:
U =
po
k − m ⋅w
2
=
po
⋅
k
1
w
1−
w
2
=Uo ⋅
1
1− r
2
Note-se que Uo representa o deslocamento estático e r a razão das frequências:
Uo =
po
k
∧ r =
w
w
A solução final é igual à soma da solução complementar com a solução particular agora
determinada:
u (t ) = A ⋅ cos(w ⋅ t ) + B ⋅ sin (w ⋅ t ) + U o ⋅
( )
1
1− r
⋅ sin w ⋅ t
2
Através das condições iniciais do movimento: o deslocamento e a velocidade no instante t
= 0s, determina-se o valor das constantes A e B:
t =0 →
u (0 ) = A ⋅ cos(0 ) + B ⋅ sin (0 ) + U o ⋅
1
1− r
2
⋅ sin (0 )
1
u& (0 ) = − A ⋅w ⋅ sin (0 ) + B ⋅w ⋅ cos(0 ) + U o ⋅
u (t ) = u (0 ) ⋅ cos(w ⋅ t ) +
1
u& (0 ) − U o ⋅
w
1− r
2
⋅w
1− r
⋅ sin (w ⋅ t ) + U o ⋅
2
⋅w ⋅ cos(0 )
1
1− r
2
( )
⋅ sin w ⋅ t
Se o o deslocamento e a velocidade no instante t = 0s forem nulos, temos:
u (t ) = −U o ⋅
r
1− r
2
⋅ sin (w ⋅ t ) + U o ⋅
1
1− r
2
( )
⋅ sin w ⋅ t = U o ⋅
1
1− r
2
( ( )
)
⋅ sin w ⋅ t − r ⋅ sin (w ⋅ t )
A solução é composta por duas parcelas: a primeira correspondente à resposta em regime
estacionário e a segunda em regime transitório:
Parcela Transitori a
Parcela Estacionar ia
→ r ⋅ sin (w ⋅ t )
( )
→ sin w ⋅ t
multiplicada pelo produto do deslocamento estático Uo por um factor D designado por
factor de amplificação dinâmica:
D=
Vibração de Sistemas Discretos de 1 G.L.
1
1− r
2
4
Quando o sistema entra em ressonância com a acção, i.e. r = 1, a solução particular
apresenta um novo aspecto:
( )
u p (t ) = C ⋅ t ⋅ cos w ⋅ t
∧ w =w
que substituida na equação do movimento determina:
C =−
po
2 ⋅ m ⋅w
A solução final, sendo igual à soma da solução complementar com a solução particular,
resulta na seguinte expressão:
u (t ) = A ⋅ cos(w ⋅ t ) + B ⋅ sin (w ⋅ t ) −
po
⋅ t ⋅ cos(w ⋅ t )
2 ⋅ m ⋅w
Através das condições iniciais do movimento: o deslocamento e a velocidade no instante t
= 0s, determina-se o valor das constantes A e B:
u (0 ) = A ⋅ cos(0 ) + B ⋅ sin (0 ) − 0
t =0 →
po
⋅ cos(0 ) + 0
2 ⋅ m ⋅w
u& (0 ) = − A ⋅w ⋅ sin (0 ) + B ⋅w ⋅ cos(0 ) −
u (t ) = u (0 ) ⋅ cos(w ⋅ t ) +
u& (0 ) +
po
2 ⋅ m ⋅w ⋅ sin (w ⋅ t ) − p o ⋅ t ⋅ cos(w ⋅ t )
w
2 ⋅ m ⋅w
Se o deslocamento e a velocidade no instante t = 0s forem nulos, temos:
u (t ) =
po
2 ⋅ m ⋅w
2
⋅ (− t ⋅w ⋅ cos(w ⋅ t ) + sin (w ⋅ t )) =
po
⋅ (− t ⋅w ⋅ cos(w ⋅ t ) + sin (w ⋅ t ))
2 ⋅k
que resulta numa função de amplitude crescente no tempo.
5
Movimento de SD1 com Amortecimento
5.1 Em vibração livre
O movimento em vibração livre de um SD1 com amortecimento corresponde à resolução
da equação:
m⋅
du (t )
d 2u (t )
+c ⋅
+ k ⋅ u (t ) = 0
2
dt
dt
que apresenta duas soluções:
u (t ) = C ⋅ e s 1 ⋅t
Vibração de Sistemas Discretos de 1 G.L.
∧ u (t ) = C ⋅ e s 2 ⋅t
5
2
s1 = −
2
c
k
c
+
−
m
2 ⋅m
2 ⋅m
∧ s2 = −
c
k
c
−
−
2 ⋅m
m
2 ⋅m
sendo por isso a solução geral a soma das duas:
u (t ) = C 1 ⋅ e s 1 ⋅t + C 2 ⋅ e s 2 ⋅t
5.1.1
Sistema criticamente amortecido
O radicando das soluções s1 e s2 coincidem:
2
k
c
= 0 ⇒ c = c cr = 2 ⋅ k ⋅ m = 2 ⋅ m ⋅w
−
m
m
2
⋅
Neste caso as duas soluções são:
u (t ) = C 1 ⋅ e
u (t ) = C 1 ⋅ e
5.1.2
c
− cr
2⋅m
c
− cr
2⋅m
⋅t
⋅t
∧ u (t ) = C 2 ⋅ t ⋅ e
+ C 2 ⋅t ⋅e
c
− cr
2⋅m
⋅t
c
− cr
2⋅m
⋅t
= (C 1 + C 2 ⋅ t ) ⋅ e
c
− cr
2⋅m
⋅t
Sistema com amortecido superior ao crítico
As duas soluções s1 e s2 indicadas anteriormente são reais e a solução geral é:
u (t ) = C 1 ⋅ e s 1 ⋅t + C 2 ⋅ e s 2 ⋅t
s 1 = w ⋅ − ξ + ξ 2 − 1 ∧ s 2 = w ⋅ − ξ − ξ 2 − 1
Através das condições iniciais do movimento: o deslocamento e a velocidade no
instante t = 0s, determina-se o valor das constantes C1 e C2:
u (t ) =
5.1.3
u& (0 ) − s 2 ⋅ u (0 ) s 1 ⋅t u& (0 ) − s 1 ⋅ u (0 ) s 2 ⋅t
⋅e
−
⋅e
s1 −s 2
s1 − s 2
Sistema com amortecido inferior ao crítico
Neste caso define-se o coeficiente de amortecimento:
ξ=
c
c
=
<1
2 ⋅ m ⋅w
c cr
A equação apresenta as duas soluções:
u (t ) = C ⋅ e s 1 ⋅t
s 1 = −ξ ⋅w + i ⋅w ⋅ 1 − ξ 2
s 1 = −ξ ⋅w + i ⋅w a
Vibração de Sistemas Discretos de 1 G.L.
∧ u (t ) = C ⋅ e s 2 ⋅t
∧ s 2 = −ξ ⋅w − i ⋅w ⋅ 1 − ξ 2
∧ s 2 = −ξ ⋅w − i ⋅w a
6
sendo w a = w ⋅ 1 − ξ 2 a frequência angular do sistema amortecido. A solução geral
resulta da soma das duas soluções:
u (t ) = C 1 ⋅ e −ξ ⋅w ⋅t +i ⋅w a ⋅t + C 2 ⋅ e −ξ ⋅w ⋅t −i ⋅w a ⋅t
u (t ) = e −ξ ⋅w ⋅t ⋅ (A ⋅ cos(w a ⋅ t ) + B ⋅ sin (w a ⋅ t ))
Através das condições iniciais do movimento: o deslocamento e a velocidade no
instante t = 0s, determina-se o valor das constantes A e B:
u (t ) = e −ξ ⋅w ⋅t ⋅ u (0 ) ⋅ cos(w a ⋅ t ) +
u& (0 ) + u (0 ) ⋅ ξ ⋅w
⋅ sin (w a ⋅ t )
wa
cuja expressão pode ainda escrever-se com o seguinte aspecto:
u (t ) = C ⋅ e −ξ ⋅w ⋅t ⋅ cos(w a ⋅ t − α )
C =
(u (0))
2
u& (0 ) ⋅ ξ ⋅w
+
w
(u& (0)⋅ ξ ⋅w )
2
∧ tan α =
u (0 )
w
5.2 Solicitado por acções harmónicas
5.2.1
Sistema com amortecido inferior ao crítico
Seja agora o movimento de um SD1 com amortecimento inferior ao crítico submetido à
acção de uma força sinusoidal f(t) de amplitude po e frequência angular w :
m⋅
d 2u (t )
du (t )
+c ⋅
+ k ⋅ u (t ) = p o ⋅ sin w ⋅ t
2
dt
dt
( )
Neste caso, para além da solução em vibração livre ou complementar, existe a solução
particular da equação que resolve o valor não nulo do segundo membro:
( )
( )
u p (t ) = C 3 ⋅ sin w ⋅ t + C 4 ⋅ cos w ⋅ t
Substituida esta solução na equação do movimento determinam-se as constantes C3 e
C4:
C 3 =Uo ⋅
1− r
(1 − r )
2 2
2
+ (2 ⋅ ξ ⋅ r )
∧ C 4 =Uo ⋅
2
− 2 ⋅ξ ⋅ r
(1 − r )
2 2
+ (2 ⋅ ξ ⋅ r )2
i.e.
u p (t ) = U o ⋅
(1 − r )
2 2
1
+ (2 ⋅ ξ ⋅ r )
2
((
⋅ 1− r
2
)⋅ sin (w ⋅t )− 2 ⋅ξ ⋅ r ⋅ cos(w ⋅t ))
que se pode ainda escrever-se com o seguinte aspecto:
Vibração de Sistemas Discretos de 1 G.L.
7
(
u (t ) = U ⋅ cos w ⋅ t − α
U =Uo ⋅
(1 − r )
1
2 2
+ (2 ⋅ ξ ⋅ r )2
)
∧ tan α =
= U o ⋅D
2 ⋅ξ ⋅ r
1− r
2
Note-se que Uo representa o deslocamento estático, r a razão das frequências e D o
coeficiente de amplificação dinâmica.
A solução final é igual à soma da solução complementar com a solução particular agora
determinada:
u (t ) = e −ξ ⋅w ⋅t ⋅ (A ⋅ cos(w a ⋅ t ) + B ⋅ sin (w a ⋅ t )) + U o ⋅
(1 − r )
2 2
1
+ (2 ⋅ ξ ⋅ r )
2
((
⋅ 1− r
2
)⋅ sin (w ⋅t )− 2 ⋅ξ ⋅ r ⋅ cos(w ⋅t ))
Através das condições iniciais do movimento: o deslocamento e a velocidade no
instante t = 0s, determina-se o valor das constantes A e B.
A = u (0 ) + U o ⋅
2 ⋅ξ ⋅ r
(1 − r )
2 2
+ (2 ⋅ ξ ⋅ r )2
u& (0 ) + ξ ⋅w ⋅ A − U o ⋅
B =
5.2.2
(
w ⋅ 1− r
(1 − r )
2 2
2
)
+ (2 ⋅ ξ ⋅ r )2
wa
Sistema criticamente amortecido
Se o sistema estiver em ressonância (para ξ de valor pequeno, verdadeiro nos casos
correntes, isso corresponde aproximadamente a r = 1), e supondo o deslocamento e a
velocidade no instante t = 0s nulos, temos:
1 −ξ ⋅w ⋅t
⋅ e
u (t ) = U o ⋅
2 ⋅ξ
ξ
⋅ cos(w a ⋅ t ) +
⋅ sin (w a ⋅ t ) − cos w ⋅ t
2
ξ
−
1
( )
A solução é composta por duas parcelas: a primeira correspondente à resposta em
regime estacionário e a segunda em regime transitório:
Parcela Transitori a
Parcela Estacionar ia
ξ
→ e −ξ ⋅w ⋅t ⋅ cos(w a ⋅ t ) +
⋅ sin (w a ⋅ t )
2
1−ξ
( )
→ cos w ⋅ t
Como se supõe ξ de valor pequeno:
(
)
w a ≈w
1
⇒ u (t ) ≈ U o ⋅
e −ξ ⋅w ⋅t − 1 ⋅ cos(w ⋅ t )
ξ ⋅ sin (w a ⋅ t ) ≈ 0
2 ⋅ξ
que apresenta amplitude crescente no tempo tendendo para duas assimptotas
horizontais: u = + Uo / (2. ξ) e u = - Uo / (2. ξ).
Vibração de Sistemas Discretos de 1 G.L.
8
NOTA: O valor r que verdadeiramente corresponde à ressonância do sistema é, no
caso geral, o valor que impõe a quantidade máxima para o coeficiente D de
amplificação do sistema, i.e.
∂D
= 0 ⇒ r = 1−ξ
∂r
Se o sistema estiver em ressonância e for ξ = 0, a solução é indeterminada. No entanto,
essa indeterminação pode ser levantada:
lim ξ →0 u (t ) = U o ⋅
1
(sin (w ⋅ t ) −w ⋅ t ⋅ cos(w ⋅ t ))
2
expressão que corresponde à solução já apresentada para a hipótese de SD1 em
ressonância sem amortecimento.
5.2.3
Sistema com amortecido superior ao crítico
Seja agora o movimento de um SD1 com amortecimento superior ao crítico submetido à
acção de uma força sinusoidal f(t) de amplitude po e frequência angular w . Neste caso,
para além da solução em vibração livre ou complementar ja apresentada no ponto 5.1.2,
existe a solução particular da equação que resolve o valor não nulo do segundo
( )
membro da equação do movimento ( m ⋅ u&&(t ) + c ⋅ u& (t ) + k ⋅ u (t ) = p o ⋅ sin w ⋅ t ) e que coincide
com a solução do movimento de um SD1 com amortecimento inferior ao crítico (uma
vez que a equação a resolver é a mesma):
( )
( )
u p (t ) = C 3 ⋅ sin w ⋅ t + C 4 ⋅ cos w ⋅ t
i.e.
u p (t ) = U o ⋅
(1 − r )
2 2
1
+ (2 ⋅ ξ ⋅ r )
2
((
⋅ 1− r
2
)⋅ sin (w ⋅t )− 2 ⋅ξ ⋅ r ⋅ cos(w ⋅t ))
ou ainda,
(
u (t ) = U ⋅ cos w ⋅ t − α
U =Uo ⋅
(1 − r )
2 2
1
+ (2 ⋅ ξ ⋅ r )2
)
= U o ⋅D
∧ tan α =
2 ⋅ξ ⋅ r
1− r
2
A solução final é igual à soma da solução complementar com a solução particular agora
determinada:
u (t ) = u (t ) = C 1 ⋅ e s 1 ⋅t + C 2 ⋅ e s 2 ⋅t + U o ⋅
Vibração de Sistemas Discretos de 1 G.L.
(1 − r )
2 2
1
+ (2 ⋅ ξ ⋅ r )
2
((
⋅ 1− r
2
)⋅ sin (w ⋅t )− 2 ⋅ ξ ⋅ r ⋅ cos(w ⋅t ))
9
s 1 = w ⋅ − ξ + ξ 2 − 1 ∧ s 2 = w ⋅ − ξ − ξ 2 − 1
Através das condições iniciais do movimento: o deslocamento e a velocidade no
instante t = 0s, determina-se o valor das constantes C1 e C2.
u& (0 ) − s 2 ⋅ u (0 ) + U o ⋅
C1 =
C 2 = u (0 ) − C 1 + U o ⋅
6
(
2 ⋅ s 2 ⋅ξ ⋅ r + 1 − r
(1 − r )
2 2
2
)⋅w
+ (2 ⋅ ξ ⋅ r )2
s1 −s 2
2 ⋅ξ ⋅ r
(1 − r )
2 2
+ (2 ⋅ ξ ⋅ r )2
Exemplos de aplicação
Nas páginas seguintes encontram-se alguns resultados de aplicação dos conceitos
teóricos apresentados a uma estrutura pendular invertida.
Vibração de Sistemas Discretos de 1 G.L.
10
ENGENHARIA CIVIL
MECÂNICA II
2º Ano / 1º Semestre – 2002/2003
Prof. João Miranda Guedes (DEC)
SISTEMA DISCRETO COM 1 GRAU DE LIBERDADE
(Pêndulo invertido em movimento oscilatório horizontal)
u(t) – Lei de movimento da massa no topo
do pilar (representada nos gráficos)
F(t) = po * sin (W * t) – Lei da acção a impor (ou
não) no topo do pilar na
direcção do deslocamento
(t)
Massa =
100kg
Rigidez do pilar = 200 N/m
Amortecimento relativo do pilar = ξ (variável)
MOVIMENTO LIVRE NÃO AMORTECIDO
( m ⋅u&&(t ) + k ⋅ u (t ) = 0 )
Dados
u(0) [m] =
v(0) [m/s] =
Resultados
1
0
(Deslocamento para t = 0s)
(Velocidade para t = 0s)
ω [rad/s] = 1,414214
T [s] = 4,442883
f [Hz] = 0,225079
Solução da Equação de Movimento
1,5
1
u(t) [m]
0,5
0
-0,5
0
2
4
6
8
10
12
14
-1
-1,5
t [s]
Vibração de Sistemas Discretos de 1 G.L.
1
Dados
u(0) [m] =
v(0) [m/s] =
Resultados
0
1
(Deslocamento para t = 0s)
(Velocidade para t = 0s)
ω [rad/s] = 1,414214
T [s] = 4,442883
f [Hz] = 0,225079
Solução da Equação de Movimento
0,8
0,6
u(t) [m]
0,4
0,2
0
-0,2 0
2
4
6
8
10
12
14
-0,4
-0,6
-0,8
t [s]
Dados
u(0) [m] =
v(0) [m/s] =
Resultados
1
1
(Deslocamento para t = 0s)
(Velocidade para t = 0s)
ω [rad/s] = 1,414214
T [s] = 4,442883
f [Hz] = 0,225079
Solução da Equação de Movim ento
1,5
1
u(t) [m]
0,5
0
-0,5
0
2
4
6
8
10
12
14
-1
-1,5
t [s]
Vibração de Sistemas Discretos de 1 G.L.
2
MOVIMENTO FORÇADO NÃO AMORTECIDO
( m ⋅u&&(t ) + k ⋅ u (t ) = f (t ) )
Acção -> f(t) = po * sin (W * t)
Dados
Resultados
p0 [N] =
W [rad/s] =
100
1
u(0) [m] =
v(0) [m/s] =
0
0
ω [rad/s] =
T [s] =
f [Hz] =
1,414214
4,442883
0,225079
(Deslocamento para t = 0s)
(Velocidade para t = 0s)
Solução da Equação de Movimento
2
1,5
u(t) [m]
1
0,5
Sol. Complementar
0
-0,5 0
Sol. Particular
2
4
6
8
10
12
14
Sol. Final
-1
-1,5
-2
t [s]
Solução da Equação de Movimento
2
1,5
u(t) [m]
1
0,5
0
-0,5 0
Sol. Complementar
Sol. Particular
5
10
15
20
25
Sol. Final
-1
-1,5
-2
t [s]
Vibração de Sistemas Discretos de 1 G.L.
3
MOVIMENTO FORÇADO NÃO AMORTECIDO EM RESSONÂNCIA
( m ⋅u&&(t ) + k ⋅ u (t ) = f (t ) para r = 1 )
Acção -> f(t) = po * sin (W * t)
Dados
Resultados
p0 [N] =
W [rad/s] =
100
1,414214
u(0) [m] =
v(0) [m/s] =
0
0
ω [rad/s] =
T [s] =
f [Hz] =
1,414214
4,442883
0,225079
(Deslocamento para t = 0s)
(Velocidade para t = 0s)
Solução da Equação de Movimento
5
4
3
u(t) [m]
2
1
0
-1 0
2
4
6
8
10
12
14
25
30
35
-2
-3
-4
t [s]
Solução da Equação de Movimento
15
10
u(t) [m]
5
0
-5
0
5
10
15
20
-10
-15
t [s]
Vibração de Sistemas Discretos de 1 G.L.
4
Acção -> f(t) = po * sin (W * t)
Dados
Resultados
p0 [N] =
W [rad/s] =
100
1,414214
u(0) [m] =
v(0) [m/s] =
1
1
ω [rad/s] =
T [s] =
f [Hz] =
1,414214
4,442883
0,225079
(Deslocamento para t = 0s)
(Velocidade para t = 0s)
Solução da Equação de Movimento
4
3
u(t) [m]
2
1
0
-1
0
2
4
6
8
10
12
14
25
30
35
-2
-3
t [s]
Solução da Equação de Movimento
10
8
6
u(t) [m]
4
2
0
-2 0
5
10
15
20
-4
-6
-8
-10
t [s]
Vibração de Sistemas Discretos de 1 G.L.
5
MOVIMENTO LIVRE COM AMORTECIMENTO INFERIOR AO CRÍTICO
( m ⋅u&&(t ) + c ⋅u& (t ) + k ⋅ u (t ) = 0 para ξ < 1 )
ξ=
Dados
u(0) [m] =
v(0) [m/s] =
Resultados
0,10
(Amortecimento)
1
1
(Deslocamento para t = 0s)
(Velocidade para t = 0s)
ωa [rad/s] = 1,407125
ω [rad/s] = 1,414214
T [s] = 4,442883
f [Hz] = 0,225079
Solução da Equação de Movimento
1,5
u(t) [m]
1
0,5
0
0
5
10
15
20
25
-0,5
-1
t [s]
ξ=
Dados
u(0) [m] =
v(0) [m/s] =
Resultados
0,20
1
1
(Amortecimento)
(Deslocamento para t = 0s)
(Velocidade para t = 0s)
ωa [rad/s] = 1,385641
ω [rad/s] = 1,414214
T [s] = 4,442883
f [Hz] = 0,225079
u(t) [m]
Solução da Equação de Movimento
1,4
1,2
1
0,8
0,6
0,4
0,2
0
-0,2 0
-0,4
-0,6
-0,8
Sol. Complementar
Sol. Particular
Sol. Final
5
10
15
20
25
t [s]
Vibração de Sistemas Discretos de 1 G.L.
6
MOVIMENTO FORÇADO COM AMORTECIMENTO INFERIOR AO CRÍTICO
( m ⋅u&&(t ) + c ⋅u& (t ) + k ⋅ u (t ) = f (t ) para ξ < 1 )
Acção -> f(t) = po * sin (W * t)
Dados
Resultados
p0 [N] =
W [rad/s] =
100
1
ξ=
0,10
(Amortecimento)
u(0) [m] =
v(0) [m/s] =
1
1
ω [rad/s] =
T [s] =
f [Hz] =
1,414214
4,442883
0,225079
(Deslocamento para t = 0s)
(Velocidade para t = 0s)
ωa [rad/s] = 1,407125
Solução da Equação de Movimento
1,5
1
u(t) [m]
0,5
Sol. Complementar
0
-0,5
Sol. Particular
0
2
4
6
8
10
12
14
Sol. Final
-1
-1,5
t [s]
Solução da Equação de Movimento
1,5
1
u(t) [m]
0,5
Sol. Complementar
0
-0,5
Sol. Particular
0
5
10
15
20
25
Sol. Final
-1
-1,5
t [s]
Vibração de Sistemas Discretos de 1 G.L.
7
MOVIMENTO FORÇADO COM AMORTECIMENTO INFERIOR AO CRÍTICO EM
RESSONÂNCIA
&
&
&
( m ⋅u (t ) + c ⋅u (t ) + k ⋅ u (t ) = f (t ) para ξ < 1 e r = 1 )
Acção -> f(t) = po * sin (W * t)
Dados
p0 [N] =
W [rad/s] =
100
1,414214
ξ=
Resultados
0,10
(Amortecimento)
u(0) [m] =
v(0) [m/s] =
1
1
ω [rad/s] =
T [s] =
f [Hz] =
1,414214
4,442883
0,225079
(Deslocamento para t = 0s)
(Velocidade para t = 0s)
ωa [rad/s] = 1,407125
Solução da Equação de Movimento
4
3
u(t) [m]
2
Sol. Complementar
1
Sol. Particular
0
-1
0
5
10
15
20
25
Sol. Final
-2
-3
t [s]
Solução da Equação de Movimento
4
3
u(t) [m]
2
Sol. Complementar
1
Sol. Particular
0
-1
0
5
10
15
20
25
30
35
40
Sol. Final
-2
-3
t [s]
Vibração de Sistemas Discretos de 1 G.L.
8
MOVIMENTO LIVRE COM AMORTECIMENTO SUPERIOR AO CRÍTICO
( m ⋅u&&(t ) + c ⋅u& (t ) + k ⋅ u (t ) = 0 para ξ > 1 )
ξ (>1) =
Dados
Resultados
1,50
(Amortecimento)
u(0) [m] =
v(0) [m/s] =
1
1
ω [rad/s] =
T [s] =
f [Hz] =
1,414214
4,442883
0,225079
(Deslocamento para t = 0s)
(Velocidade para t = 0s)
s1 = -0,54018
s2 = -3,70246
Solução da Equação de Movimento
1,2
1
u(t) [m]
0,8
0,6
0,4
0,2
0
0
2
4
6
8
10
12
14
t [s]
ξ (>1) =
Dados
Resultados
3,00
(Amortecimento)
u(0) [m] =
v(0) [m/s] =
1
1
ω [rad/s] =
T [s] =
f [Hz] =
1,414214
4,442883
0,225079
(Deslocamento para t = 0s)
(Velocidade para t = 0s)
s1 = -0,24264
s2 = -8,24264
Solução da Equação de Movimento
1,2
1
u(t) [m]
0,8
0,6
0,4
0,2
0
0
2
4
6
8
10
12
14
t [s]
Vibração de Sistemas Discretos de 1 G.L.
9
MOVIMENTO FORÇADO COM AMORTECIMENTO SUPERIOR AO CRÍTICO
( m ⋅u&&(t ) + c ⋅u& (t ) + k ⋅ u (t ) = f (t ) para ξ > 1 )
Acção -> f(t) = po * sin (W * t)
Dados
Resultados
p0 [N] =
W [rad/s] =
100
1
ξ (>1) =
1,50
u(0) [m] =
v(0) [m/s] =
1
1
ω [rad/s] =
T [s] =
f [Hz] =
1,414214
4,442883
0,225079
(Amortecimento)
(Deslocamento para t = 0s)
(Velocidade para t = 0s)
s1 =
s2 =
-0,54018
-3,70246
Solução da Equação de Movimento
1,6
1,4
1,2
u(t) [m]
1
0,8
0,6
0,4
0,2
0
-0,2 0
2
4
6
8
10
12
14
-0,4
t [s]
Solução da Equação de Movimento
1,6
1,4
1,2
u(t) [m]
1
0,8
0,6
0,4
0,2
0
-0,2 0
5
10
15
20
25
-0,4
t [s]
Vibração de Sistemas Discretos de 1 G.L.
10