")
SUMÁRIO
1
Métodos de Estimação e Propridades dos Estimadores
1.1 Estimação Pontual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.1 Método da Máxima Verossimilhança . . . . . . . . . . . . . . . . .
1.1.1.1 Método da Máxima Verossimilhança -caso multiparamétrico
1.1.2 Método dos Momentos . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Propriedades dos Estimadores . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Estimadores Não-Viesados . . . . . . . . . . . . . . . . . . . . . .
1.2.2 Consistência . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.3 Eficiência . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.4 Estatística Suficiente . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Exercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
2
4
7
9
9
11
12
14
17
1
MÉTODOS DE ESTIMAÇÃO E PROPRIDADES DOS ESTIMADORES
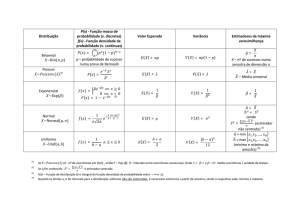
Estimação é o processo que consiste em utilizar dados amostrais para estimar valores para
os parâmetros populacionais desconhecidos. Assumindo que uma característica dos elementos
numa população pode ser representada por uma variável aleatória X cuja função de densidade
ou probabilidade é f (x|θ ), , temos que:
θ é um parâmetro com valores desconhecidos. f (x|θ ) tem uma forma conhecida, exceto
pelo parâmetro θ Como θ ∈ Θ, sendo Θ o espaço paramétrico, temos uma familia de densidades, sendo cada valor de θ correspondente a um membro da familia.
Considerando x1 , ..., xn valores de uma amostra aleatória X1 , ..., Xn da variável aleatória X,
com f.d.p. ou f.p. f (x|θ ) O objetivo é a partir dos dados observados estimar um valor parâmetro
θ.
As estatísticas amostrais são utilizadas como estimativas de um parâmetro θ pode ser feita
por duas maneiras
• Estimação pontual - consiste na estimativa um única valor para o parâmetro θ
• Estimação intervalar - consiste na estimativa que especifica um intervalo de valores possíveis, no qual se admite que esteja o parâmetro θ .
Definição 1.1 (Estimação Pontual): Uma estimativa pontual de um parâmetro desconhecido θ é um valor obtido a partir da amostra (através de uma estatística) que se destina a
fornecer valores aproximados do parâmetro.
Definição 1.2 (Estimador): Um estimador θ̂ é uma estatística (i.e. função da amostra) que
fornece estimativas pontuais.
1.1
ESTIMAÇÃO PONTUAL
Seja uma amostra aleatoria X1 , ..., Xn com f.d.p. ou f.p. f (x|θ ) O problema é definir uma
estatística T = T (X1 , ..., Xn ) de tal modo que, após observarmos X1 = x1 , ..., Xn = xn , T =
T (X1 , ..., Xn ) seja uma boa estimativa pontual de θ Para definir a estatística T = T (X1 , ..., Xn ), é
utilizado métodos de estimação, sendo os principais:
Métodos de Estimação e Propridades dos Estimadores
2
• Método da Máxima Verossimilhança
• Método dos momentos
• Método dos Mínimos Quadrados.
1.1.1
Método da Máxima Verossimilhança
Definição 1.3 (Função de Verossimilhança): Se uma amostra aleatória X1 , ..., Xn são variáveis aleatórias independentes e identicamente distruídas (i.i.d) com f.d.p. ouf.p.) f (x|θ ), sua
função de verossimilhança é dada por:
n
L(θ ; x) = f (x1 , ..., xn |θ ) = f (x1 |θ )... f (xn |θ ) = ∏ f (xi |θ )
i=1
Definição 1.4 (Função de Log-Verossimilhança): O logaritmo natural da função de verossimilhança é denominado função de log-verossimilhança e é denotado por
l(θ ; x) = lnL(θ ; x)
A função de densidade (ou de probabilidade) é função da variável aleatória X, assumindo
que o parâmetro θ é conhecido.
Distribuição Poisson
f (x|λ ) = e−λ
λx
, x = 0, 1, 2, 3, ..., λ ≥ 0
x!
Distribuição Normal
(x−µ)2
1
−
f (x|µ, σ 2 ) = √
e 2σ 2 , −∞ < x < ∞
2πσ 2
A função de densidade se torna uma função de verossimilhança quando os valores da variável X são conhecidos e o valor de parâmetro é desconhecido
os valores da variável X são conhecidos, a função passa a depender do valor do parâmetro
desconhecido θ
Distribuição Poisson - considerando X = 10
L(λ |X = 10) = e−λ
λ 10
10!
Distribuição Normal - considerando X = 2, 5
(2,5−µ)2
1
−
e 2σ 2
L(µ, σ 2 |X = 2, 5) = √
2πσ 2
Métodos de Estimação e Propridades dos Estimadores
3
A função de densidade se torna uma função de verossimilhança quando os valores da variável X são conhecidos e o valor de parâmetro é desconhecido
Definição 1.5 (Função Escore): A função escore, denotada por U(θ ), é definida como a
primeira derivada da função de log-verossimilhança em relação θ
U(θ ) =
∂ l(θ ; x)
∂θ
Definição 1.6 (Função de Informação): A função de informação, denotada por I(θ ), é definida como menos a segunda derivada da função de log-verossimilhança em relação θ
∂ 2 l(θ ; x)
I(θ ) = −
∂θ2
Definição 1.7 (Estimador de Máxima Verossimilhança): O estimador de máxima verossimilhança de θ é o valor θ̂ que maximiza a função de verossimilhança L(θ ; x)
O valor de θ que maximiza a função de verossimilhança L(θ ; x), também maximiza l(θ ; x),
assim pode-se utilizar a função de log-verossimilhança. Como encontrar o estimador de máxima
verossimilhança
1. Encontrar a função de verossimilhança L(θ ; x) e log-verossimilhança l(θ ; x);
2. Encontrar a função Escore U(θ ) e iguala-la a zero para obter o estimador
3. Encontrar a função de informação e verificar se o estimador é ponto de máximo.
Exemplo 1.1 (Bernoulli): Sejam X1 , ..., Xn uma amostra aleatória da variável aleatória X ∼
Bernoulli(θ ). Obter o estimador de máxima verossimilhança para θ .
Função de probabilidade
f (x) = θ x (1 − θ )1−x , x = 0, 1 Θ = θ ; 0 < θ < 1
Função de verossimilhança e log-verossimilhança
n
n
L(θ ; x) = θ ∑i=1 xi (1 − θ )n−∑i=1 xi
n
l(θ ; x) =
∑ xilnθ +
i=1
!
n
n − ∑ xi ln(1 − θ )
i=1
Função escore
n
n
n − ∑ xi
∑ xi
U(θ ) =
∂ l(θ ; x) i=1
=
∂θ
θ
−
i=1
1−θ
Métodos de Estimação e Propridades dos Estimadores
4
Igualando a função escore a zero e resolvendo em relação θ , temos
n
n
n
n − ∑ xi
∑ xi
i=1
i=1
−
1 − θ̂
θ̂
∑ xi
= 0 ⇒ θ̂ =
i=1
n
Função de Informação
n
∑ xi
I(θ ) = −
n
n − ∑ xi
∂ 2 l(θ ; x) i=1
i=1
= 2 +
>0
∂θ2
θ
(1 − θ )2
Assim, o estimador de maxima verossimilhança é dador por:
n
∑ xi
θ̂ =
i=1
n
Exemplo 1.2 (Uniforme continua): Sejam X1 , ..., Xn uma amostra aleatória da variável ale
atória X ∼ Uni f orme θ − 21 , θ + 12 . Obter o estimador de máxima verossimilhança para θ .
Função de probabilidade
f (x) =
1
I (x), a ≤ x ≤ b
b − a [a,b]
Função de verossimilhança
n
L(θ ; x) =
n
∏ I[θ − 12 ,θ + 12 ](xi) = ∏ I[x(n)− 12 ,x(1)+ 21 ](θ )
i=1
i=1
Como a função de verossimilhança é constante no intervalo de x(n) − 12 , x(1) + 12 , qualquer
ponto desse intervalo é um estimado de maxima verossimilhança para θ
Assim, o estimador de maxima verossimilhança é dador por:
1
2
1
θ̂ = x(1) +
2
x(n) + x(1)
θ̂ =
2
θ̂ = x(n) −
1.1.1.1
Método da Máxima Verossimilhança -caso multiparamétrico
Definição 1.8 (Vetor Escore): O vetor escore, denotada por U(θ ), é definida como as derivadas parciais de primeira ordem da função de log-verossimilhança em relação a cada θi
∂ l(θ ; x)
∂ l(θ ; x)
U(θ ) =
, ...,
∂ θ1
∂ θk
Métodos de Estimação e Propridades dos Estimadores
5
Definição 1.9 (Matrix de Informação de Fisher): A matrix de informação, denotada por
I(θ ), é definida como menos das derivadas parciais de segunda ordem da função de logverossimilhança em relação a cada θi
∂ 2 l(θ ;x)
2
;x)
... − ∂∂ l(θ
− ∂θ2
θ
θ
1 k
1
..
..
I(θ ) =
..
.
.
.
2
;x)
− ∂∂ l(θ
θ θ
... − ∂
k 1
2 l(θ ;x)
∂ θk2
Seja θ = (θ1 , θ2 , ..., θk ) um vetor de parâmetros de dimensão k. O estimador de máxima
verossimilhança de θ1 , θ2 , ..., θk ) são obtidos como soluções das equações:
∂ L(θ ; x)
=0
∂ θi
Na obtenção do estimador de máxima verossimilhança duas verificações são importantes
i) verificar se a solução esta em no espaço paramétrico Θ
ii) verificar se a solução é máximo local de l(θ ; x)
Para verificar a condição ii, é suficiente que U(θ ) = 0 e que a matriz de informação de fisher
I(θ ) seja positiva definida
a11 a12 ... a1n
a21 a22 ... a2n
Uma matriz A =
.. . .
..
..
é positiva definida se as submatrizes A1 , A2 , A3 , ...An
.
.
.
.
an1 an2 ... ann
têm determinantes forem positivos.
"
#
a11 a12 a13
a11 a12
Sendo: A1 = [a11 ], A2 =
, A3 = a21 a22 a23 ,..., An = A
a21 a22
a31 a32 a33
Exemplo 1.3 (Normal): Vetor Escore
" ∂ l(µ,σ 2 ;x) #
U(µ, σ 2 ) =
∂µ
∂ l(µ,σ 2 ;x)
∂σ2
=
n
1
σ2
∑ (xi − µ)
i=1
− 2σn 2 + 2(σ12 )2
n
∑ (xi − µ)2
i=1
Igualando o vetor score a zero e resolvendo em relação µ e σ 2 , temos
Métodos de Estimação e Propridades dos Estimadores
6
n
1 n
∑ (xi − µ̂) = 0 ⇒ µ̂ =
σ̂ 2 i=1
∑ xi
i=1
n
=X
n
n
−
1
n
+
∑ (xi − µ̂)2 = 0 ⇒ σ̂ 2 =
2
2σ̂
2(σ̂ 2 )2 i=1
∑ (xi − X)2
i=1
n
Matriz de Informação
n
∂ 2 l(µ,σ 2 ;x)
∂ µ2
2
I(µ, σ ) = ∂ 2 l(µ,σ
2 ;x)
∂ σ 2µ
n
∂ 2 l(µ,σ 2 ;x)
σ2
2
∂ µσ
=
∂ 2 l(µ,σ 2 ;x)
n
∂ (σ 2 )2
(x − µ)
∑ i
∑ (xi − µ)
i=1
i=1
(σ 2 )2
n
2
(x
−
µ)
∑ i
(σ 2 )2
− 2(σn2 )2 + i=1
(σ 2 )3
n
(n−1)
∑ (xi − µ)2
2
i=1
|A1 | = σn2 > 0 |A2 | =
− 2(σn 2 )3 > 0
(σ 2 )4
Assim, o estimador de maxima verossimilhança é dador por:
n
∑ xi
µ̂ =
i=1
n
=X
n
∑ (xi − X)2
σ̂ 2 =
i=1
n
Teorema 1.1 (Princípio da invariância): Sejam X1 , ..., Xn uma amostra aleatória da variável
aleatória X com função de densidade (ou de probabilidade) f (x|θ ). Se θ̂ é um estimador de
máxima verossimilhança de θ , então g(θ̂ ) é um estimador de máxima verossimilhança de g(θ ).
Exemplo 1.4: Sejam X1 , ..., Xn uma amostra aleatória da variável aleatória X ∼ N(µ, σ 2 ),
n
∑ (xi − X)2
então o estimador σ 2 = é σ̂ 2 =
v
u n
u (x − X)2
t∑ i
dado por σ̂ = i=1 n
i=1
n
. Assim, o estimador do desvio padrão σ =
√
σ2 é
Métodos de Estimação e Propridades dos Estimadores
1.1.2
7
Método dos Momentos
Definição 1.10 (Momentos Populacionais): Se X é uma variável aleatória, o r-ésimo momento de X é definido como, denotado por µr , é definido como
µr = E[X r ]
Definição 1.11 (Momentos Amostrais): Seja X1 , ..., Xn uma amostra aleatória da variável
aleatória X, com f.d.p. ou f.p. f (x|θ ). Então o r-ésimo momento amostral, denotado por mr , é
definido por:
n
∑ Xir
mr =
i=1
n
Definição 1.12 (Estimador pelo Método dos Momentos): O estimador pelo método dos
momento de θ é o valor θ̂ se ele for solução das equações
µr = mr , r = 1, 2, 3, ..., k
Exemplo 1.5 (Bernoulli): Sejam X1 , ..., Xn uma amostra aleatória da variável aleatória X ∼
Bernoulli(θ ). Obter o estimador pelo método dos momentos para θ .
Função de probabilidade
f (x|θ ) = θ x (1 − θ )1−x , x = 0, 1 Θ = θ ; 0 < θ < 1
Momentos populacionais
E[X] = θ ⇒ µ1 = θ
Assim,
n
∑ Xi
u1 = m1 ⇒ θ̂ =
i=1
n
Exemplo 1.6 (Normal): Sejam X1 , ..., Xn uma amostra aleatória da variável aleatória X ∼
N(µ, σ 2 ). Obter o estimador pelo método dos momentos para µ e σ 2 .
Função de densidade
(x−µ)2
1
−
e 2σ 2 , x ∈ R, µ ∈ R, σ 2 > 0
f (x|µ, σ 2 ) = √
2πσ 2
Métodos de Estimação e Propridades dos Estimadores
8
Momentos populacionais
E[X] = µ ⇒ µ1 = µ
V (X) = σ 2 ⇒ E[X 2 ] − (E[X])2 = σ 2
E[X 2 ] = σ 2 + (E[X])2 ⇒ σ 2 + µ 2
µ2 = σ 2 + µ12
Assim,
n
∑ Xi
µ1 = m1 ⇒ µ̂ =
i=1
n
µ2 = m2 ⇒ σ̂ 2 + µ12 =
=X
∑ni=1 Xi2
n
n
∑ (Xi − X)2
σ̂ 2 =
i=1
n
Exemplo 1.7 (Gama): Sejam X1 , ..., Xn uma amostra aleatória da variável aleatória X ∼
Gama(λ , r). Obter o estimador pelo método dos momentos para λ e r.
Função de densidade
λ
(λ x)r−1 e−λ x x ≥ 0, λ > 0, r > 0
f (x|λ , r) =
Γ(r)
Momentos populacionais
r
r
⇒ µ1 =
λ
λ
r
r
2
V (X) =
⇒ E[X ] − (E[X])2 = 2
2
λ
λ
r 2
r
r
+ (E[X])2 = 2 +
E[X 2 ] =
λ2
λ
λ
2
r
r
µ2 =
+
2
λ
λ
E[X] =
Assim,
Métodos de Estimação e Propridades dos Estimadores
9
n
r̂
µ1 = m1 ⇒
∑ Xi
i=1
=
n
λ̂
r̂
= X ⇒ r̂ = X λ̂
λ̂
n
µ2 = m2 ⇒
λ̂ =
r̂
λ̂ 2
+
2
r̂
∑ Xi2
=
i=1
λ̂
X
r̂ =
n
2
∑ (xi − X)
i=1
n
X
n
∑ (xi − X)2
i=1
n
1.2
2
n
PROPRIEDADES DOS ESTIMADORES
Existem vários estimadores para um certo parâmetro. Assim surge as seguintes perguntas:
• O que é um bom estimador?
• Como escolher entre os várias estimadores existentes?
• Quais serão os critérios usados para comparar estimadores e caracterizar os bons estimadores?
As principais qualidades de um estimador devem ser:
• Ausência de vício (estimador não-viciado);
• Consistência (estimador consistente);
• Eficiência (estimador de variância mínima);
• Suficiência (estimador suficiente).
1.2.1
Estimadores Não-Viesados
Definição 1.13 (Estimador não-viesado): Um estimador θ̂ é dito não-viesado (viciado)
para θ se E[θ̂ ] = θ , para todo θ ∈ Θ
Definição 1.14 (Viés ou Vicio): O viés de um estimador θ̂ , denotado por B(θ̂ ), é definido
como
B(θ̂ ) = E[θ̂ ] − θ
.
Definição 1.15 (Estimador assintoticamente não-viesado): Um estimador θ̂ é dito ser assintoticamente não-viesado (viciado) se lim B(θ̂ ) = 0, para todo θ ∈ Θ
n→∞
Métodos de Estimação e Propridades dos Estimadores
10
Definição 1.16 (Erro Quadrático Médio (EQM)): O erro quadrático médio de um estimador
θ̂ é dado por:
EQM[θ̂ ] = E (θ̂ − θ )2
O EQM é medida de da qualidade do estimador, sendo uma composição da variância e viés
do estimador.
2
EQM[θ̂ ] = V (θ̂ ) + B(θ̂ )
Para estimador não-viesados o EQM coincide com a variância do estimador
EQM[θ̂ ] = V (θ̂ )
O Erro quadrático médio é comumente empregado para comparar dois estimadores θ̂1 e θ̂2 .
θ̂1 será o melhor estimador se θ̂2
EQM[θ̂1 ] ≤ EQM[θ̂2 ]
Exemplo 1.8 (Normal): Sejam X1 , ..., Xn uma amostra aleatória da variável aleatória X ∼
N(µ, σ 2 ). Temos que o estimador de maxima verossimilhança de µ e σ 2 são dados por:
n
n
∑ (xi − X)2
∑ xi
µ̂ =
i=1
n
=X
σ̂ 2 =
i=1
n
Para o estimador de µ temos que
E X = µ
σ2
V X =
n
Assim, X é um estimador não-viesado para µ
Com relação ao estimador da variância temos que:
E σ̂ 2 =
1
σ2
n−1 2
2
nσ − n
=
σ
2
n
n
n
Assim σ̂ 2 é um estimador viesado para σ 2 , sendo o viés dado por:
B(σ̂ 2 ) =
n−1 2
σ2
σ −σ2 = −
n
n
Fazendo lim B(σ̂ 2 ) = 0, verificamos que σ̂ 2 é assintoticamente não-viesado
n→∞
Métodos de Estimação e Propridades dos Estimadores
11
A variância do estimador σ 2 é dada por
σ4
(n − 1)S2
V [σ̂ ] =
V
n2
σ2
2
Como
(n − 1)S2
2
∼ χn−1
σ2
Então
σ4
(n − 1)S2
V [σ̂ ] =
V
n2
σ2
σ4
2(n − 1) 4
=
2(n − 1) =
σ
2
n
n2
2
Assim o EQM é dado por:
2
2(n − 1) 4
σ2
2n − 1 4
EQM[σ̂ ] =
σ + −
=
σ
2
n
n
n2
2
Para obter um estimador não viesado para σ 2 que seja função de σ̂ 2 , temos
g(σ̂ 2 ) =
Assim
n
σ̂ 2
n−1
n
n
2
E
σ̂ =
E σ̂ 2 = σ 2
n−1
n−1
g(σ̂ 2 ) é um estimador não-viesado para σ 2 , sendo que:
n
g(σ̂ 2 ) =
n
σ̂ 2 =
n−1
∑ (Xi − X)2
i=1
n−1
= S2
Desta forma S2 é um estimador não-viesado para σ 2 e sua variância é dada por:
σ4
(n − 1)S2
(n − 1) σ 2 2
V [S ] = V
S =
V
(n − 1) σ 2
(n − 1)2
σ2
σ4
2σ 4
=
2(n
−
1)
=
(n − 1)2
n−1
2
1.2.2
Consistência
Definição 1.17 (Estimador Consistente): Sejam X1 , ..., Xn uma amostra aleatória da variável aleatória X que depende do parâmetro θ . Um estimador θ̂ = θ̂ (X1 , ..., Xn ) é dito consistente
para o parâmetro θ se
lim P |θ̂ − θ | ≥ ε = 0
n→∞
Métodos de Estimação e Propridades dos Estimadores
12
Para verificar essa propriedade em geral utiliza-se a desigualdade de Chebychev.
Consistência não implica em não-viés assintótico.
As condições gerais para a consistência de um estimador θ̂ são:
lim E[θ̂ ] = θ
n→∞
lim V [θ̂ ] = 0
n→∞
Exemplo 1.9 (Normal): Sejam X1 , ..., Xn uma amostra aleatória da variável aleatória X ∼
N(µ, σ 2 ). Considerando X e S2 estimadores para µ e σ 2 ,verificar a consistência dos estimadores
Pela desigualdade de Chebychev, temos que:
σ2
V (X)
=
P |X − µ| ≥ ε ≤
ε2
nε 2
2
σ
lim P |X − µ| ≥ ε ≤ lim 2 = 0
n→∞
n→∞ nε
Assim X é consistente para µ
Para S2 pela desigualdade de Chebychev, temos que:
V (S2 )
2σ 4
P |S2 − σ 2 | ≥ ε ≤
=
ε2
(n − 1)ε 2
2σ 4
=0
lim P |S2 − σ 2 | ≥ ε ≤ lim
n→∞
n→∞ (n − 1)ε 2
Assim S2 é consistente para σ 2
1.2.3
Eficiência
Definição 1.18 (Informação de Fisher): O informação de Fisher, denotado por IF (θ ), é
definida a como :
"
#
∂ l(θ ; x) 2
IF (θ ) = E
∂θ
Propriedade da função escore e da Informação de Fisher
• A média da função escore é 0,
E [U(θ )] = 0
• A informação de Fisher de θ é igual a variância da função escore
V [U(θ )] = E (U(θ ))2 = E
"
∂ l(θ ; x)
∂θ
2 #
= IF (θ )
Métodos de Estimação e Propridades dos Estimadores
13
• Se a verossimilhança é duas vezes diferenciável então a informação de Fisher também
pode ser obtida como
"
IF (θ ) = E
∂ l(θ ; x)
∂θ
2 #
2
∂ l(θ ; x)
=E −
∂θ2
Teorema 1.2 (Desigualdade Informação ou Desigualdade de Cramér-Rao): Sejam X1 , ..., Xn
uma amostra aleatória da variável aleatória X e θ̂ um estimador não-viesado de θ . Sob condições de regularidade
1
V [θ̂ ] ≥
IF (θ )
A parte direita de desigualdade é denominada cota inferior de Cramer-Rao e expressa uma
cota inferior para a variância de um estimador não-viesado.
Definição 1.19 (Eficiência): A eficiência de um estimador θ̂ , não viesado para o parâmetroθ
é dada pelo quociente
LI(θ )
e(θ̂ ) =
V [θ̂ ]
1
sendo
LI(θ ) =
IF (θ )
Definição 1.20 (Estimador Eficiente): Um estimador θ̂ é dito eficiente se for não viesado e
sua variância atingir o limite inferior da desigualdede de Cramer-Rao para todos os possíveis
valores de θ .
• Se V [θ̂ ] = LI(θ ) então e(θ̂ ) = 1
Definição 1.21 (Estimador Não-Viesado de Variância Uniformemente Mínima (ENVVUM)):
Sejam X1 , ..., Xn uma amostra aleatória da distribuição da variável aleatória X com função de
densidade (ou de probabilidade) f (x|θ ). Um estimador T = t(X1 , ..., Xn ) de g(θ ) é dito ser um
estimador não-viesado de variância uniformemente mínima de g(θ ) se, somente se,
i) E[T ] = g(θ ), isto é um estimador não-viesado para g(θ ), e
ii) V [T ] ≤ V [U] para qualquer outro estimador U não-viesado de g(θ )
• Se variância de um estimador atingir o limite inferior da desigualdade de Cramer-Rao,
então o estimador é um ENVVUM.
Exemplo 1.10: Sejam X1 , ..., Xn uma amostra aleatória da variável aleatória X ∼ Bernoulli(θ ),
n
∑ xi
e seja θ̂ =
i
n
um estimador para θ .
Métodos de Estimação e Propridades dos Estimadores
14
• A Variância do estimador
n
n
n − ∑ xi
∑ xi
V [θ̂ ] =
∂ l(θ ; x) i=1
=
∂θ
θ
i=1
−
1−θ
• Função escore
n
n
n − ∑ xi
∑ xi
U(θ ) =
∂ l(θ ; x) i=1
=
∂θ
θ
−
i=1
1−θ
• Função de Informação
n
I(θ ) = −
∂ 2 l(θ ; x)
∂θ2
n
n − ∑ xi
∑ xi
=
i=1
θ2
+
i=1
(1 − θ )2
• Informação de Fisher
n
n
∑ xi
∑i xi n − i=1
n
=
IF I(θ ) = E[I(θ )) = 2 +
2
θ
(1 − θ )
θ (1 − θ )
• Assim temos que θ̂ é eficiente e ENVVUM :
V [θ̂ ] =
1.2.4
1
IF I(θ )
Estatística Suficiente
Definição 1.22 (Princípio da Suficiência): Seja X uma variável aleatória e seja T (.) uma
estatística obtida como função dos valores amostrais de X, assim,
• T (X1 , ..., Xn ) é suficiente para θ , então qualquer inferência sobre θ dependerá apenas da
amostra X1 , ..., Xn somente através de T (X1 , ..., Xn ).
• Isto é dadas duas realizações amostrais distintas X1 , ..., Xn e X10 , ..., Xn0 , tais que
T (X1 , ..., Xn ) = T (X10 , ..., Xn0 )
então as inferências sobre θ são as mesmas, independente de observamos X1 , ..., Xn ou
X10 , ..., Xn0 .
Definição 1.23 (Estatística suficiente): Dizemos que a estatística T (X1 , ..., Xn ) é suficiente
para θ , quando a distribuição condicional de X1 , ..., Xn dado T for independente de θ
Métodos de Estimação e Propridades dos Estimadores
15
Exemplo 1.11: Sejam X1 , ..., Xn uma amostra aleatória da variável aleatória X ∼ Bernoulli(θ ).
n
Verificar se T = ∑ Xi é suficiente para θ
i=1
P[X1 = x1 , ..., Xn = xn , T = t]
P[T = t]
P[X1 = x1 , ..., Xn = xn ]
=
n t
n−t
t θ (1 − θ )
θ t (1 − θ )n−t
= n t
n−t
t θ (1 − θ )
1
= n
f (X1 , ..., Xn = xn |T = t) =
t
n
Assim, T = ∑ Xi é suficiente para θ
i=1
Exemplo 1.12: Sejam X1 , X2 , X3 uma amostra aleatória de tamanho 3 da variável aleatória
n
X ∼ Bernoulli(θ ). Verificar se T = ∑ X1 X2 + X3 é suficiente para θ
i=1
As probabilidades condicionais podem ser calculadas da seguinte forma:
P[X1 = 0, X2 = 0, X3 = 0, T = 0]
P[T = 0]
p(1 − p)3
=
(1 − p)3 + 2(1 − p)2 p
f (X1 = 0, X2 = 0, X3 = 0|T = 0) =
Sendo
P[T = 0] = P[X1 = 0X2 = 0, X3 = 0] + P[X1 = 0, X2 = 1, X3 = 0] +
+P[X1 = 1, X2 = 0, X3 = 0]
Assim
Métodos de Estimação e Propridades dos Estimadores
(X1 , X2 , X3 ) T
(0, 0, 0)
0
(0, 0, 1)
1
(0, 1, 0)
0
(1, 0, 0)
0
(0, 1, 1)
1
(1, 0, 1)
1
(1, 1, 0)
1
(1, 1, 1)
2
16
f (X1 , X2 , X3 |T )
1− p
1+ p
1− p
1 + 2p
p
1+ p
p
1+ p
p
1 + 2p
p
1 + 2p
p
1 + 2p
1
Como a distribuição de depende θ conclui-se que T não é uma estatística suficiente para θ
Teorema 1.3 (Critério da Fatoração): Sejam X1 , ..., Xn uma amostra aleatória da distribuição da variável aleatória X com função de densidade (ou de probabilidade) f (x|θ ), em que e a
função de verosimilhança L(θ |x). Temos, então, que a estatística T = T (X1 , ..., Xn ) é suficiente
para θ , se e somente se pudermos escrever
L(θ |x) = h(x1 , ..., xn )gθ (T (x1 , ..., xn ))
em que h(x1 , ..., xn ) é uma função que só depende de x1 , ..., xn e gθ (T (x1 , ..., xn )) é uma função
que depende de θ e de x1 , ..., xn somente através da função t. As funções h e g são funções
não-negativas.
Exemplo 1.13: Sejam X1 , ..., Xn ma amostra aleatória da variável aleatória X ∼ Poisson(θ ).
Temos que
n
n
n
θ xi
1
L(θ |x) = e−nθ ∏
= ∏ e−nθ θ ∑ i=1 xi
i=1 xi !
i=1 xi !
Tomando
n
1
i=1 xi !
h(x1 , ..., xn ) = ∏
e
gθ (T (x1 , ..., xn )) = e−nθ θ ∑ i=1
nx
i
n
Temos, pelo critério da fatoração, temos que T = ∑ Xi é suficiente para θ .
i=1
Teorema 1.4 (Critério da Fatoração - caso multiparamétrico): Sejam X1 , ..., Xn uma amostra
aleatória da distribuição da variável aleatória X com função de densidade (ou de probabilidade) f (x|θ ), em que θ pode ser um vertor, e a função de verosimilhança L(θ |x). Seja as
estatística Ti = ti (X1 , ..., Xn ), com i = 1, 2, ..., r. Então a estatística T = (T1 , T 2, ...Tr ) é conjun-
Métodos de Estimação e Propridades dos Estimadores
17
tamente suficiente para θ , se e somente se pudermos escrever
L(θ |x) = h(x1 , ..., xn )gθ (T1 (x), ..., Tr (x))
em que h(x1 , ..., xn ) é uma função que só depende de x1 , ..., xn e gθ (T1 (x), ..., Tr (x) é uma função
que depende de θ e de x1 , ..., xn somente através das funções t1 , ...,tn . As funções h e g são
funções não-negativas.
Exemplo 1.14: Sejam X1 , ..., Xn uma amostra aleatória da variável aleatória X ∼ N(µ, σ 2 ).
Temos, então que θ = (µ, σ 2 ). Nesta caso, a função de verossimilhança pode ser escrita como:
n
n
2 − 1 ∑ (x −µ)2
1
2
2σ 2 i=1 i
e
L(µ, σ ; x) =
2πσ 2
n
2
n
n
1 2 1 − 2σ1 2 ∑ xi2 + σµ2 ∑ xi2 −n σµ 2
i=1
i=1
=
n e
2π
σ2
com −∞ < µ < ∞ e σ 2 > 0
Sendo
h(x1 , ..., xn ) =
1
2π
n
2
−
gθ (t1 (x),t2 (x)) = e
µ2
1 n 2 µ n 2
∑ x +
∑ x −n 2
2σ 2 i=1 i σ 2 i=1 i
σ
Assim, pelos critério da fatoração temos que a estatística T = (∑ni=1 Xi , ∑ni=1 Xi2 ) é conjuntamente suficiente para θ = (µ, σ 2 ).
1.3
EXERCICIOS
1.1) Uma variável aleatória X tem função de densidade de probabilidade dada por:
f (x) = (θ + 1)xθ , 0 < x < 1 θ > −1
Foi retirada uma amostra amostra de tamanho 6, x1 = 0, 3; x2 = 0, 8; x3 = 0, 27; x4 = 0, 35;
x5 = 0, 62 e x6 = 0, 55
a) Obtenha o estimador de máxima de verossimilhança e calcule a estimativa de θ para a
amostra. baseado numa amostra de tamanho n.
b) Obtenha o estimador pelo método dos momentos e calcule a estimativa de θ para a amostra.
1.2) Uma amostra de tamanho n1 é obtida de uma população com distribuição normal com
média µ1 e variancia σ12 . Uma segunda amostra de tamanho n2 é obtida de uma população com
distribuição normal com média µ2 e variancia σ22 .
a) Qual o estimador de máxima de verossimilhança de θ = µ1 − µ2 .
Métodos de Estimação e Propridades dos Estimadores
18
b) Verifique a consistência do estimador obtido no item a
1.3) O raio do círculo é medido com um erro de medição, que tem distribuição normal N(0, σ 2 ),
sendo σ 2 desconhecido. Dado que n medições independentes do raio, encontrar um estimador
não viesado da área do círculo.
1.4) Seja X uma observação simples de Bernoulli. Seja dois estimadores de θ T1 (X) = X e
T2 (X) = 12 .
a) Ambos os estimadores são não viesados:
b) Compare os erros quadráticos médios dos estimadores
1.5) Sejam X1 , ..., Xn uma amostra aleatória de variáveis aleatórias independentes e identicamente distribuídas (i.i.d.) com função de densidade dada por:
f (x|θ ) = θ x−2
x>θ
θ >0
a) Obtenha o estimador de máxima de verossimilhança de θ
b) Verifique se o estimador do item a é não viesado
1.6) Sejam X1 , ..., Xn uma amostra aleatória de variáveis aleatórias independentes e identicamente distribuídas (i.i.d.) com distribuição gamma(r, λ ), considere que o parametro r é conhecido.
a) Encontre uma estatística suficiente para λ
b) Encontre o estimador de máxima de verossimilhança para λ
1.7) Sejam X1 , ..., Xn uma amostra aleatória de variáveis aleatórias independentes e identicamente distribuídas (i.i.d.) com distribuição dada por:
f (x|θ ) = θ xθ −1 ,
0 < x < 1,
θ >0
a) Encontre o estimador de máxima de verossimilhança para µ =
θ
1+θ
b) Encontre o estimador UMVUE para θ
c) Encontre o estimador pelo método dos mínimos quadrados para θ e verifique sua consistencia
1.8) Sejam X1 , ..., Xn uma amostra aleatória de uma distribuição uniforme no intervalo (θ , θ +
1). Seja
1
n
θ̂1 = X −
e θ̂2 = X(n) −
2
n+1
a) Verifique se os estimadores são viesados.
Métodos de Estimação e Propridades dos Estimadores
b) Compare os estimadores pelo erro quadrático médio.
c) Compare a eficiência dos estimadores.
19
")