Part I
Métodos Matemáticos para Física
Teórica I
1
Funções Complexas
1.1
Números complexos como Espaço Vetorial
Seja i =
do tipo
√
−1. Nas soluções de uma equação de segunda ordem, surgem raízes
z =x+i y ,
onde x e y são números reais. Escrevemos
Re (z) = x,
Im (z) = y,
e chamamos de parte real e de parte imaginária, respectivamente. Sabemos
também que i nunca se torna um número real através da multiplicação por um
número real, ou seja,
α × i 6= real,
para qualquer número real α. Isto equivale a dizer que a condição
z = x + iy = 0
(1)
x = y = 0.
(2)
implica necessariamente
Consideremos o conjunto de todas as combinações do tipo acima e o chamemos
C.
C = {z = x + i y , x, y ∈ R}
onde R é o conjunto de todos os números reais.
Introduzimos as seguintes regras:
∀
a ∈ R, ∀ z = x + i y ∈ C,
az ≡ (ax) + i (ay) ,
e
∀
z1 = x1 + i y1 ∈ C, ∀ z2 = x2 + i y2 ∈ C,
z1 + z2 = (x1 + x2 ) + i (y1 + y2 ) ∈ C,
1
Exercício 1: Mostre que se
x1 + i y1 = x1 + i y2 ,
então necessariamente
x1 = x2 ,
y1 = y2 .
Juntando as propriedades acima, podemos mostrar que o conjunto C forma
um espaço vetorial de dimensão1 2, com o corpo (conjunto dos números escalares) sendo o conjunto de números reais, ou seja, R.
Exercício 2: Seguindo a definição de dimensão de um espaço vetorial mencionada na
nota de rodapé, prove que o espaço vetorial de números complexos tem
dimensão 2.
Os elementos básicos de um espaço vetorial sáo: 1) noção de “direções” e 2)
noção de “distância”. A dimensão do espaço é nada mais do que o número de
direções indendentes. No caso do espaço vetorial formado de números complexos
com corpo real, as direções são a parte real e a parte imaginária. Podemos
expressar, assim, um número complexo num plano (x, y) como visto na figura
abaixo.
Im(z)
z=x+iy
y
x
Re(z)
1 Num
espaço vetorial, os elementos z1 , z2 , ..., zn são ditos linearmente dependentes, quando
existe um conjunto de números {α1 , α2 , ..., αn } (escalares) não identicamente nulos, tal que
n
X
αi zi = 0.
i=1
Inversamente, se a equação acima implica necessariamente em
αi = 0, i = 1, ..., n
então o conjunto de vetores {zi , i = 1.., n} é dito linearmente independente.
O número máximo de elementos linearmente independentes num dado espaço vetorial é
dito a dimensão do espaço.
2
Fig. 1. Plano Complexo
Lembrete: Embora, um número complexo tenha propriedade vetorial, ou seja, possui
sempre duas componentes, real e complexa, quando uma das componentes
é nula, apenas escrevemos uma componente. Por exemplo,
z =a+i×0
é denotado por simplesmente
z = a,
e
z = 0 + α × i,
denotamos por
z = iα.
Em particular, se ambas as componentes forem nulas,
z = 0 + i × 0,
escrevemos
z = 0.
1.2
Multiplicação entre números complexos como operação
Sabemos que
i × i = −1 ∈ R,
i × 1 = i ∈ C.
Desta forma, a multiplicação pelo número imaginário puro unitário transforma
de uma direção para outra. Em geral, a multiplicação,
z1 × z2 = z3
pode ser considerada como um mapeamento de C para C,
z
1
z1 : z2 ∈ C →
z3 ∈ C.
O mapeamento de um espaço vetorial para o próprio espaço vetorial é dito
“operador”. Assim, a multiplicação de números complexos é um operador. Postulando que vale a regra de distributividade, sabemos que a regra geral para a
multiplicação entre dois números complexos é
(x1 + iy1 ) × (x2 + iy2 ) = (x1 x2 − y1 y2 ) + i (x1 y2 + y1 x2 )
Note que esta regra é comutativa, ou seja,
(x1 + iy1 ) × (x2 + iy2 ) = (x2 + iy2 ) × (x1 + iy1 ) .
3
Exercício 3: Prove que a regra de multiplicação acima satisfaz: 1) comutatividade
z1 × z2 = z2 × z1 ,
(3)
z1 × (z2 × z3 ) = (z1 × z2 ) × z3 .
(4)
2) associatividade,
e 3) distributividade e linearidade,
z1 × (αz2 + βz3 ) = α (z1 × z2 ) + β (z1 × z3 ) ,
onde α e β são números reais.
Podemos considerar que a regra acima define a propriedade operatorial de
um número complexo no sentido de que, quando se aplica este número complexo
em outro (um vetor), ele gera um outro número complexo (outro vetor). Por
exemplo, vamos considerar o número i. Para um número complexo z = x + iy,
temos
i × z = i × (x + iy)
= ix − y.
Im(z)
i × z = -y + ix
z=x+iy
Re(z)
Fig. 2 Efeito de multiplicação i.
Vemos que a multiplicação de i por um número complexo z corresponde à operação de rotação de z por 90 graus em torno da origem.
Exercício 4: Quais são os números complexos que correspondem às seguintes rotações,
respectivamente? a) rotação de 180 graus. b) rotação de 270 graus, c)
rotação de -90 graus.
Vamos considerar um número complexo,
e (θ) ≡ cos θ + i sin θ.
4
(5)
Para um número complexo z = x + iy, temos
e (θ) × z = (cos θ + i sin θ) × (x + iy)
= (x cos θ − y sin θ) + i (x sin θ + y cos θ) .
Podemos ver que
e (θ) : z → z 0 = e (θ) × z
= (x cos θ − y sin θ) + i (x sin θ + y cos θ) ,
ou seja,
e (θ) :
µ
x
y
¶
→
µ
x0
y0
¶
=
µ
x cos θ − y sin θ
x sin θ + y cos θ
¶
Isto corresponde à rotação no plano (x − y) por um ângulo θ.
Exercício 5: Mostre geometricamente que, quando um vetor
µ
¶
x
y
é rodado por umângulo θ, o vetor resultante fica
µ 0 ¶ µ
¶
x
x cos θ − y sin θ
=
.
x sin θ + y cos θ
y0
Mostre ainda que pode ser escrito como
µ
¶
µ 0 ¶
x
x
= A (θ)
,
y
y0
onde A é uma matriz (2 × 2),
A(θ) =
µ
cos θ
sin θ
− sin θ
cos θ
¶
.
Exercício 6: Mostre que para αeβ reais,
e (α) × e (β) = e (α + β) .
Exercício 7: Mostre que
A (α) A (β) = A (α + β) .
1.3
Representação Polar
Para um número complexo arbitrário
z = x + iy,
5
(6)
podemos escrever sempre
z=α
µ
¶
1
1
x+i y ,
α
α
onde α é real. Escolhendo α tal que
µ ¶2 µ ¶2
1
1
x +
y = 1,
α
α
temos
α=
e podemos escrever sempre
p
x2 + y 2 ,
1
x = cos θ,
α
1
y = sin θ,
α
já que
2
2
(cos θ) + (sin θ) = 1.
Assim, temos
p
x2 + y 2 (cos θ + i sin θ)
p
= x2 + y 2 e (θ) .
z=
O ângulo θ é dado pelo ângulo entre o vetor z e o eixo real no
p plano complexo
(x − y). O ângulo θ é chamado de “argumento” de z e r = x2 + y 2 é dito o
módulo de z.
O efeito geométrico de multiplicar o número complexo Eq.(5) por outro
número complexo z é o de rodar z por um ângulo θ. Por outro lado, o efeito
geométrico de multiplicar um número complexo z por um número real α é esticar
z por α vezes sem mudar a sua direção. Desta forma, o efeito geométrico da
multiplicação por um número complexo geral é a combinção dos dois efeitos
acima, ou seja, rodar por ângulo θ igual ao argumento de z e depois esticar o
vetor na direção por fator igual ao módulo de z.
Exercício 8: Obtenha a expressão polar dos seguintes números complexos.
√
z = 1 + i 3,
1.4
Divisão por números complexos como operação inversa da multiplicação
Por construção, para dois números complexos arbitrários, z1 , z2 ∈ C, sempre
existe z3 ∈ C tal que
z3 = z1 × z2 .
(7)
6
Já discutimos que z1 é uma operação que leva o elemento z2 para z3 . Vamos
considerar a operação inversa. Suponhamos que exista2 um número complexo
z4 , tal que
z4 × z3 = z2 .
Então, escrevemos que
z4 = z1−1 ,
por razão óbvia. Por exemplo, multiplicando z4 dos dois lados da Eq.(7), temos
z4 × z3 = z4 × (z1 × z2 )
= (z4 × z1 ) × z2
Assim, temos
z2 = (z4 × z1 ) × z2
para qualquer z2 ∈ C . Portanto,
(z4 × z1 ) = 1.
Podemos mostrar também que
z1 × z4 = 1.
(8)
Exercício 9: Prove a Eq.(8).
Vimos que
z × z −1 = z −1 × z = 1.
Isto justifica que para z,
z = x + iy,
podemos escrever que
z −1 =
1
.
x + iy
Mas isto não mostra qual é o número complexo correspondente. Usando a
definição, podemos obter explicitamente o número complexo inverso de um dado
z = x + iy do seguinte modo. Temos
z −1 (x + iy) = 1.
Escrevendo
z −1 = u + iv,
temos
ux − vy = 1,
uy + vx = 0.
2 Note
que não é necessariamente garantido que exista.
7
(9)
Queremos u e v em função de x e y. As equações acima constituem um sistema
linear para u e v. Colocando na forma matricial, temos
µ
¶µ
¶ µ ¶
x −y
u
1
=
y x
v
0
Temos
Mas
µ
µ
u
v
¶
x −y
y x
=
µ
¶−1
x −y
y x
=
¶−1 µ
1
x2 + y 2
µ
1
0
¶
x
−y
y
x
.
¶
,
se x2 + y 2 6= 0, portanto, temos
µ
¶
µ
¶µ ¶
1
u
x y
1
= 2
v
−y x
0
x + y2
µ
¶
1
x
= 2
−y
x + y2
e, conseqüentemente,
x
y
−i 2
.
(10)
x2 + y 2
x + y2
O método acima é um método padrão para obter o elemento inverso a partir
da sua definião. Mas no caso de número complexo, o mesmo resultado pode ser
obtido da seguinte forma. Da Eq.(9), temos
z −1 =
z −1 (x + iy) = 1.
Multiplicando dos dois lados o número complexo, (x − iy) , temos
z −1 (x + iy) (x − iy) = x − iy.
Mas
e, portanto,
(x + iy) (x − iy) = x2 + y 2 ,
¡
¢
z −1 x2 + y 2 = x − iy.
¢
¡
Dividindo os dois lados por x2 + y 2 , temos a expressão Eq.(10).
O exercício acima para obter z −1 mostra que, para qualquer z, sempre existe
−1
z , exceto se x2 + y 2 = 0. Mas x2 + y 2 = 0 implica em x = y = 0, e portanto
z = 0. Assim, sempre existe z −1 , exceto se z = 0.
Exercício 10: Para um número complexo expresso na forma polar,
z = r (cos θ + i sin θ) ,
−1
obtenha o inverso, z . Interprete geometricamente o resultado e o papel
de z −1 como um operador3 .
3 O inverso de e (θ) é e (−θ) . Isto pode ser visto da Eq.(6), fazendo α = θ, β = −θ, já que
e (0) = cos (0) + i sin (0) = 1.
8
p
No exercício acima, r = x2 + y 2 representa o módulo do vetor z no plano
(x − y) e o denotamos por |z| .
p
|z| = r = x2 + y 2
Quando estamos operando com z = x + iy, freqüentemente aparece a quantidade
x − iy,
portanto é útil introduzir uma notação específica para esta. Denotemos x − iy
por z ∗ para z = x + iy e o chamemos de “conjugado complexo” (ou às vezes
simplesmente conjugado) de z. O conjugado complexo do conjugado complexo
é o próprio z,
∗
(z ∗ ) = z.
Tomar o conjugado complexo de um número complexo z é um mapeamento
de C para C e, portanto, um operador. Além disto, é um operador linear.
Exercício 11: Expresse o módulo e o argumento das seguintes expressões em termos de
módulo e do argumento de z, kzk e arg z = θ.
w = (z + 1) ,
w = (z − i) z,
z+1
.
w=
z−1
Exercício 12: Para z = x + iy, obtenha um número complexo ze que transforma z em z ∗ .
1.5
Produto Escalar
Para um espaço vetorial, podemos definir o produto escalar. Vamos lembrar
o produto escalar. Seja V um espaço vetorial e denotemos os elementos de V
(vetores) por4 |xi, |yi, ... . Ou seja,
V = {|xi, |yi, |zi, .....} .
Sejam |xi, |yi elementos arbitrários de V. Quando está definida uma regra de
mapeamento deste par ordenado (|xi, |yi) para um número real5 (escalar =
elemento do corpo), é dito que o produto escalar está definido, desde que esta
regra satisfaça as seguintes propriedades:
1. linearidade:
(|xi, a|yi) = a (|xi, |yi) .
2. distributividade:
(|xi, |yi + |zi) = (|xi, |yi) + (|xi, |zi) .
4 Notação
5 No
de Dirac.
momento, restringimos o corpo ao conjunto de números reais.
9
3. reciprocidade:
(|xi, |yi) = (|yi, |xi) .
4. positividade:
∀
|xi ∈ V,
(|xi, |xi) ≥ 0,
e a igualdade vale se e somente se |xi = 0. A quantidade (|xi, |xi)1/2 é
chamada de módulo do vetor |xi e denotada por k|xik.
No caso do espaço vetorial tridimensional Euclidiano 3 R, sabemos que o
produto escalar entre dois vetores,
⎞
⎛
x1
r1 = ⎝ y1 ⎠
z1
⎞
⎛
x2
r2 = ⎝ y2 ⎠ ,
z2
é definido por
(r1 , r2 ) = x1 x2 + y1 y2 + z1 z2
(11)
e podemos provar que esta definição de produto escalar satisfaz todas as condições
1) a 4) e o módulo do vetor r fica
p
krk = x2 + y 2 + z 2 .
Exercício 13: Prove que a definição de produto escalar na Eq.(11) satisfaz todas as
condições para ser produto escalar.
Exercício 14: Usando somente as propriedades 1) a 4) que definem produto escalar,
prove que vale a seguinte desigualdade6
2
(|xi, |yi) ≤ (|xi, |xi) (|yi, |yi) .
(12)
A desigualdade de Schwartz garante que
−1 ≤
(|xi, |yi)
≤1
k|xik k|yik
e, por isso, podemos definir o ângulo θ por
cos θ =
6 Desigualdade
(|xi, |yi)
.
k|xik k|yik
de Schwartz.
10
(13)
Exercício 15: Prove que o ângulo θ definido acima é, de fato, o ângulo entre os dois
vetores.
Exercício 16: Usando a desigualdade de Schwartz, mostre que7
|k|xik − k|yik| ≤ k|xi − |yik ≤ |k|xik + k|yik| .
(14)
O módulo do vetor diferença entre dois vetores
k|xi − |yik
é chamado de “distância” entre estes dois vetores e o denotamos por
d (|xi, |yi) .
No caso do espaço vetorial formado de números complexos, podemos definir
o produto escalar entre dois números complexos, z1 = x1 + iy1 e z2 = x2 + iy2 ,
por
(z1 , z2 ) = x1 x2 + y1 y2 .
Pela inspecção, podemos verificar que podemos escrever
(z1 , z2 ) = Re {z1∗ z2 } .
Exercício 17: Mostre que Re {z1∗ z2 } = Re {z2∗ z1 } .
Exercício 18: Usando a definição do ângulo θ (Eq.(13), calcule o ângulo entre dois
números complexos,
z1 = r1 {cos θ1 + i sin θ1 } ,
z2 = r2 {cos θ2 + i sin θ2 } .
1.6
Potenciação de um número complexo e raiz
Até agora, definimos a álgebra do conjunto de todos os números complexos.
Podemos, então, considerar a potenciação de um número complexo. A potenciação de um número complexo também é um número complexo. Por exemplo,
z2 = z × z
fica
¡
¢
z 2 = x2 − y 2 + i2xy
na forma Cartesiana, mas na forma polar fica
z 2 = r2 (cos 2θ + i sin 2θ) .
Em geral, a potência maior fica mais simples na forma polar,
z n = rn (cos nθ + i sin nθ) .
7 Desigualdade
triangular
11
(15)
Exercício 19: Prove, por indução matemática8 .
Por outro lado, a n-ésima raiz de um número é a operação inversa da potenciação. Por exemplo, para um dado z, queremos calcular
z 1/n .
Isto significa que
´n
³
z 1/n = z,
ou seja, queremos um número complexo cuja n-ésima potência resulta em z.
Escrevendo
z 1/n = r (cos θ + i sin θ) ,
temos
rn (cos nθ + i sin nθ) = kzk (cos θz + i sin θz ) ,
(16)
onde
θz = arg (z) .
Assim, temos
r = kzk1/n ,
e uma possibilidade é obviamente
nθ = θz ,
ou seja
1
θz .
n
Mas esta não é a única solução. Existem mais possibilidades que satisfazem a
Eq.(16), pois a condição
θ=
cos α = cos β,
sin α = sin β
não implica necessariamente
α = β,
mas a solução mais geral é
α = β + 2πk,
8 Indução
Matemática: A forma de provar uma afirmação que vale para uma seqüência de
números inteiros n em geral. A indução matemática é constituída de 2 etapas. 1) demostrar
que a afirmação vale para um valor particular de n, digamos n0 . Em geral, escolhe-se n0 = 0,
ou 1, ou algum valor particular para o qual a afirmação é obviamente válida. 2) provar que, se
vale a afirmação para n = K, então a afirmação vale também para n = K + 1. 1) e 2) juntos
provam que a afirmação em questão é válida para qualquer n ≥ n0 . É importante que, na
etapa 2), use-se somente a hipótese, ou seja, a validade da afirmação para um valor particular
n = K, e não se pode generalizar para qualquer K + 1, etc.
Se na etapa 2), prova-se que , se vale a afirmação para n = K, então a afirmação vale
também para n = K − 1, junto com 1), então demostra-se que a afirmação é válida para
qualquer n ≤ n0 .
12
onde k é qualquer número inteiro. Assim, as soluções distintas para a Eq.(16)
são
1/n
r = kzk
,
e
θk =
1
2πk
θz +
, k = 1, .., n
n
n
Exercício 20: Obtenha as seguintes raízes e represente-as no plano (x − y) :
z 3 = 1,
1
1
z 4 = √ + √ i,
2
2
√
3
z = 4 + 4 3i.
Exercício 21: Mostre que, para n, m inteiros,
½
π
(−1)m ,
n = 2m,
in = ei 2 n =
(−1)m i, n = 2m + 1
1.7
Função Algébrica de variável complexa
Com a álgebra e a potenciação definidas, podemos considerar as funções algébricas. Por exemplo, as funções de variável complexa, z,
az + b
,
cz + d
f (z) = az 2 + bz + c,
etc,
f (z) =
sendo a, b, c e d constantes (podendo ser complexas). A função f (z) é um
mapeamento de C para C. O valor de f (z) é um número complexo e, portanto,
tem parte real e parte imaginária. Vamos escrever
f (z) = u + iv.
Mas
z = x + iy,
0
então, o mapenamento z → z = f (z) é um mapeamento de um espaço bidimensional para outro espaço bidimensional,
u = u(x, y),
v = v(x, y).
Isto pode ser visto como uma mudança de variáveis de (x, y) para (u, v) . Por
outro lado, a mudança de variáveis pode ser vista como uma transformação de
coordenadas. Podemos considerar (u, v) como um novo conjunto de coordenadas
13
para expressar um ponto P num espaço bidimensional (um plano) no lugar das
coordenadas Cartesianas (x, y) . Por exemplo, a linha x = a = const. no plano
(x, y) será mapeada na linha, expressa parametricamente,
u = u(a, y),
v = v(a, y).
Se eliminarmos y das equações acima, teremos
u = u (v, a)
que representa a linha no plano (u, v).
Vamos considerar um outro exemplo. Seja
w = z2.
Escrevendo
w = u + iv,
z = x + iy,
temos
u = x2 − y 2 ,
v = 2xy.
Para x = a = const, temos a forma paramétrica da curva u = u (v, a) ,
u = a2 − y 2 ,
v = 2ay.
Eliminando o parâmetro y, temos
³ v ´2
.
2a
(17)
³ v ´2
− b2 .
2b
(18)
u = a2 −
Analogamente, para y = b = const, temos
u=
Exercício 22: Desenhe várias curvas v = v(u) no plano (u, v) correspondentes a x =
a = const. e y = b = const. variando a e b, fazendo, por exemplo, a =
1/3, 1/2, 1, 2, 3, 4 e idem para b. Observe que as duas famílias de curvas se
cruzam perpendicularmente em todos os pontos.
Exercício 23: Prove que as duas famílias de curvas no plano (u, v) acima se cruzam
perperdicularmente entre elas.
14
Exercício 24: Desenhe as famílias de curvas no plano (u, v) corrrespondentes a x = a =
const. e y = b = const. para a função
u + iv =
z+1
.
z−2
Prove, novamente, que as duas famílias de curvas no plano (u, v) correspondentes a x = a = const. e y = b = const. se cruzam perperdicularmente entre elas.
1.8
Funções Analíticas
Os exemplos acima mostram que o mapeamento do plano (x, y) para o plano
(u, v) gera um sistema de coordenadas curvilíneas ortogonais. Isto é de fato
sempre verdade para uma função chamada função analítica. Definiremos em
seguida o que é uma função analítica e estudaremos suas propriedades.
1.8.1
Revisão - Expansão de Taylor para uma função de uma variável
real
Vamos fazer uma revisão. Seja f (x) uma função suave da variável real x em
torno do ponto x = a. Então, para x “suficientemente próximo” de a, podemos
escrever
1 (1)
1
1
2
3
f (a) (x − a) + f (2) (a) (x − a) + f (3) (a) (x − a) + ...
1!
2!
3!
(19)
que chamamos de expansão de Taylor da função f em torno do ponto x = a.
Aqui,
¯
dn f (x) ¯¯
(n)
f (a) =
dxn ¯x=a
f (x) ' f (a) +
é a n-ésima derivada da função f no ponto x = a. O significado da expressão
“suficientemente próximo” depende da função em questão. Dependendo da
função e do valor de (x − a) , a série pode nem mesmo convergir. O valor
máximo de |x − a| para que a série de Taylor convirja é chamado de “raio de
convergência”.
Exercício 25: Deduza a expressão (19).
Exercício 26: Obtenha a expansão de Taylor das seguintes funções em torno de ponto
x0 = 0 e calcule o raio de convergência:
f (x) = ex ,
1
f (x) =
,
x+1
f (x) = sin−1 (x),
−1
f (x) = tan
15
(x).
(20)
(21)
(22)
(23)
Exercício 27: Consideremos a soma formal
∞
X
a d
a2 d2
an dn
=
1
+
+ ··· ,
+
n! dxn
1! dx
2! dx2
n=0
onde a é uma constante. Formalmente, usando o resultado da Eq.(20),
podemos escrever
d
ea dx = 1 +
a d
a2 d2
+ ···
+
1! dx
2! dx2
Mostre que
d
ea dx f (x) = f (x + a) .
1.9
Função Exponencial
Utilizando o resultado da Eq.(20), podemos definir a função exponencial de uma
variável complexa z como
∞
X
1 n
z def
e =
(24)
z .
n!
n=0
Esta série tem raio de convergência infinito.
Exercício 28: Usando a definição acima, prove que, para quaisquer números complexos
z1 e z2 , temos
ez1 ez2 = ez1 +z2 .
(25)
Exercício 29: Mostre que
−1
(ez )
= e−z .
Exercício 30: Usando a definição, mostre que
µ
¶n
1
lim 1 + z
= ez .
n→∞
n
(26)
(27)
Exercício 31: Usando o resultado acima, mostre que
(ez1 )
z2
= ez1 z2 .
Para
z = x + iy,
temos
ez = ex+iy
e, usando a propriedade Eq.(25), temos
ez = ex eiy .
16
(28)
O primeiro fator ex é a exponencial comum. Vamos estudar o segundo fator eiy .
Usando a definição, temos
eiy =
∞
X
1
(iy)n .
n!
n=0
Vamos separar a soma em duas partes: uma com n par e outra com n ímpar,
∞
∞
X
X
1
1
(iy)n +
(iy)n
n!
n!
n:par
n:ı́mpar
½
¾
½
¾
1 2
1 4
1 3
1 5
= 1 − y + y − ··· + i y − y + y − ···
2!
4!
3!
5!
= cos y + i sin y,
eiy =
que é e (y) que definimos na Eq.(5). Temos, assim, a fórmula de Euler,
eiθ = cos θ + i sin θ.
1.10
(29)
Expansão de Taylor para funções de muitas variáveis
A generalização da fórmula na Eq.(19) para uma função que tem n variáveis é
n
f (x1 , x2 , ..., xn ) ' f (a1 , a2 , .., an ) +
+
+
n
n
n
n
1 X ∂f
(a1 , a2 , , ..., an ) (xi − ai )
1! i=1 ∂ai
1 X X ∂2f
(a1 , a2 , , ..., an ) (xi − ai ) (xj − aj )
2! i=1 j=1 ∂ai ∂aj
n
1 XXX
∂3f
(a1 , a2 , , ..., an ) (xi − ai ) (xj − aj ) (xk − ak )
3! i=1 j=1
∂ai ∂aj ∂ak
k=1
+ ··· ,
onde
etc.
(30)
¯
∂f
∂f (x1 , x2 , ..., xn ) ¯¯
(a1 , a2 , , ..., an ) ≡
¯
∂ai
∂xi
(x1 =a1 ,x2 =a2 ,,...,xn =an )
Exercício 32: Deduza a expressão (30), usando indução matemática.
Exercício 33: Mostre que
n X
n
X
n
X
∂kf
(a1 , a2 , , ..., an ) (xi1 − ai1 ) (xi2 − ai2 ) · · · (xik − aik )
∂ai1 ∂ai2 · · · ∂aik
i1 =1 i2 =1
ik =1
" n
#k
X
∂
=
(xi − ai )
f (a1 , a2 , ..., an ) .
∂ai
i =1
···
k
17
Vamos introduzir a notação vetorial. Escrevemos
⎛ ∂ ⎞
⎜
⎜
∇=⎜
⎝
Assim, podemos escrever9
n
X
ik =1
(xi − ai )
onde
⎜
⎜
r=⎜
⎝
⎛
⎜
⎜
a=⎜
⎝
Exercício 34: Mostre que
..
.
∂
∂xn
⎟
⎟
⎟.
⎠
∂
= ((r − a) · ∇) ,
∂ai
⎛
e
∂x1
∂
∂x2
x1
x2
..
.
xn
a1
a2
..
.
an
⎞
⎟
⎟
⎟
⎠
⎞
⎟
⎟
⎟.
⎠
ea·∇ f (x1 , x2 , .., xn ) = f (x1 + a1 , x2 + a2 , · · · , xn + an ) .
1.11
Derivada de funções com variáveis complexas
A derivada de uma função com variável real é definida por
f (x + ∆x) − f (x)
df (x)
= lim
,
∆x→0
dx
∆x
caso exista o limite indicado. No caso de números complexos, como z tem dois
graus de liberdades, z = x + iy, temos que tomar cuidado com a existência do
limite.
Exercício 35: Calcule os dois limites:
que
⎤
∆x
⎦,
lim ⎣ lim q
∆x→0
(∆x)2 + (∆y)2
⎡
⎤
∆x
⎦,
lim ⎣ lim q
∆x→0 ∆y→0
2
2
(∆x) + (∆y)
∆y→0
9 Note
⎡
(r − a) · ∇ 6= ∇ · (r − a) .
18
Se o limite
df (z)
f (z + ∆z) − f (x)
= lim
(31)
∆z→0
dz
∆z
existe, então, o valor do limite deve ser independente da direção de ∆z ao se
aproximar do elemento 0. Ou seja, o valor
lim
∆x→0,
∆y→0
f (x + iy + ∆x + i∆y) − f (x + iy)
∆x + i∆y
tem que ser independente da razão ∆x/∆y. Escrevendo
f = u + iv,
u = u (x, y) ,
v = v(x, y),
temos
f (x + iy + ∆x + i∆y) = u (x + ∆x, y + ∆y) + iv (x + ∆x, y + ∆y)
∂u (x, y)
∂u (x, y)
+ ∆y
+ ···
= u (x, y) + ∆x
∂x
∂y
¸
∙
∂v (x, y)
∂v (x, y)
+ ∆y
+ ··· ,
+ i v (x, y) + ∆x
∂x
∂y
onde usamos a expansão de Taylor em relação a x e y. Então, até a primeira
ordem, temos
½
∙
¸
∙
¸¾
1
∂u (x, y)
∂v (x, y)
∂u (x, y)
∂v (x, y)
f (z + ∆z) − f (z)
=
∆x
+i
+ ∆y
+i
.
∆z
∆x + i∆y
∂x
∂x
∂y
∂y
Para que esta expressão não dependa da razão ∆x/∆y, devemos ter
¸
∙
¸
∙
∂v (x, y)
∂u (x, y)
∂v (x, y)
∂u (x, y)
+i
=i
+i
.
∂y
∂y
∂x
∂x
(32)
Exercício 36: Confira a afirmação acima.
Assim, como condição necessária e suficiente para que a função f (z) tenha
a derivada Eq.(31), as derivadas parciais das partes reais e imaginárias têm que
satisfazer a Eq.(32), ou seja,
∂v (x, y)
∂u (x, y)
=−
,
∂y
∂x
∂u (x, y)
∂v (x, y)
=
.
∂y
∂x
(33)
(34)
Estas são conhecidas como as condições de Cauchy-Riemann.
Uma função f (z) é dita analítica no ponto z = z0 quando existe a derivada
desta função neste ponto.
19
Exercício 37: Julgue se as funções abaixo são analíticas ou não nos pontos z = z0 indicados:
f (z) = z + z ∗ , z0 = 1,
f (z) = zz ∗ , z0 = 1,
z+1
, z0 = 0,
f (z) =
z−1
f (z) = ez , z0 = 1 + i.
Usando as condições de Cauchy-Riemann, podemos escrever de várias formas.
df
∂u (x, y)
∂v (x, y)
=
+i
dz
∂x
∂x
∂u (x, y) ∂v (x, y)
=i
−
∂x
∂x
∂u (x, y)
∂u (x, y)
−i
=
∂x
∂y
∂v (x, y) ∂v (x, y)
=i
−
.
∂y
∂x
É interessante expressar as condições de Cauchy-Riemann em termos de
linguagem de análise vetorial. Vamos introduzir o vetor tridimensional,
⎛
⎞
v (x, y)
A (x, y) = ⎝ u (x, y) ⎠ .
0
A divergência deste vetor fica
∂Ax
∂Ay
∂Az
+
+
∂x
∂y
∂z
∂v
∂y
=
+
∂x ∂y
= 0,
∇·A≡
pela Eq.(33) (aqui z representa a coordenada Z e não o número complexo). Por
outro lado, o rotacional,
⎛
⎞
∂Ay
∂Az
∂y − ∂z
⎜
∂Az ⎟
x
∇ × A ≡ ⎝ ∂A
,
∂z − ∂x ⎠
∂Ay
∂Ax
−
∂x
∂y
fica
⎛
∇×A=⎝
∂u
∂x
0
0
−
∂v
∂y
20
⎞
⎛
⎞
0
⎠ = ⎝ 0 ⎠,
0
pela Eq(34). Assim, temos
∇ · A = 0,
(35)
∇ × A = 0.
(36)
Sabemos que se
∇ × A = 0,
então, sempre existe uma função escalar ϕ tal que podemos escrever
A = ∇ϕ.
Exercício 38: Prove a afirmação acima.
Então, substituindo na Eq.(35), temos
∇ · ∇ϕ = 0,
ou seja
∇2 ϕ = 0.
Esta equação é conhecida como Equação de Laplace. Em geral, uma função que
satisfaz a equação de Laplace é chamada de função harmônica.
No caso de funções complexas, não há dependência na terceira componente,
temos
ϕ = ϕ (x, y)
e
Já que
temos também que
µ
∂2
∂2
+ 2
2
∂x
∂y
¶
ϕ (x, y) = 0.
¡
¢
∇2 (∇ϕ) = ∇ ∇2 ϕ ,
∇2 A = 0,
ou seja
⎛
⎞
v (x, y)
∇2 ⎝ u (x, y) ⎠ = 0.
0
(37)
Isto é, ambas as partes real e imaginária de uma função complexa são funções
harmônicas de variáveis x e y. Naturalmente, a Eq.(37) é demonstrada diretamente das condições de Cauchy-Riemann, Eqs.(33,34).
Exercício 39: Prove, diretamente das condições de Cauchy-Riemann, que
∇2 u = 0,
∇2 v = 0.
21
v
f(z)
y
wo
dz1
dw1 u
dw2
dz2
zo
x
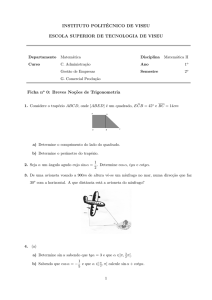
Figure 1: Fig.3 Mapeamento w = f (z) . Os vetores dz1 e dz2 são mapeados em
dw1 e dw2 , respectivamente, mantendo o ângulo entre eles.
22
Como mencionado antes, uma função de variável complexa f (z) define um
mapeamento do plano (x, y) para o plano (u, v) . Para uma função analítica,
este mapeamento possui a seguinte propriedade geométrica importante. Seja z0
um ponto onde f (z) é analítica e w0 = f (z0 ) , o ponto correspondente do mapeamento. Sejam dz1 e dz2 dois deslocamentos infinitesimais a partir do ponto
z = z0 no plano z = (x, y). Estes deslocamentos definem os deslocamentos infinitesimais correspondentes no plano w = (u, v) (ver a figura acima). Podemos
provar que o ângulo entre dois deslocamentos é preservado pelo mapeamento,
ou seja, o ângulo entre dz1 e dz2 é idêntico ao ângulo entre dw1 e dw2 . A prova
é fácil. Como vimos, o ângulo entre dois deslocamentos dz1 e dz2 é dado por
cos θz1 ∧z2 =
(dz1 , dz2 )
dz1∗ dz2
=
.
kdz1 k kdz2 k
kdz1 k kdz2 k
Analogamente, o ângulo entre dw1 e dw2 fica
cos θw1 ∧w2 =
Mas
dw1 =
e
dw2 =
µ
µ
dw1∗ dw2
.
kdw1 k kdw2 k
df
dz
df
dz
¶
¶
dz1 ,
z=z0
dz2 ,
z=z0
então temos
cos θw1 ∧w2
¶∗ ³ ´
df
dz1
dz2
dz
z=z0
z=z0
°
°
°
=°
°³ df ´
° °³ df ´
°
°
°
°
dz1 ° ° dz
dz2 °
° dz
°
µ³
=
df
dz
´
z=z0
∗
dz1 dz2
kdz1 k kdz2 k
z=z0
= cos θz1 ∧z2 .
Exercício 40: Seja u + iv = f (z) , z = x + iy e f (z) uma função analítica num domínio
Ω. Mostre que, dentro deste domínio, as curvas no plano (u, v) correspondentes a x = const. e y = const. se cruzam perpendicularmente.
1.12
Função Inversa
Para uma função
w = f (z) ,
(38)
z = f −1 (z) .
(39)
podemos considerar seu inverso,
Por exemplo, para
w = z2,
23
temos
z = w1/2 .
(40)
Neste caso, como vimos, para um dado w, temos duas possibilidades para z,
1/2 i arg ω/2
z1 = kwk
e
e
1/2 i(arg ω/2−π)
z2 = kwk
= −z1 ,
e
e a função Eq.(40) tem valores múltiplos (função plurívoca). Estudaremos mais
adiante a estrutura do mapeamento para funções plurívocas. No caso da função
exponencial,
w = ez ,
(41)
podemos considerar o seu inverso
z = log (w) .
Em geral, temos
w = kwk ei arg w
= elogkwk+i arg w
e, comparando com a Eq.(41), podemos identificar
z = log kwk + i arg w.
(42)
Assim, podemos definir a função logaritmo como
log (w) = log kwk + i arg w.
(43)
Exercício 41: Calcule log(z) para os seguintes valores de z :
z = 1 + i,
√
z = 3 − i.
1.13
Alguns exemplos de funções complexas
Usando a definição de log (z) , podemos definir a função mais geral de exponenciação
z a = ea log z ,
(44)
sendo a complexo. Outras funções elementares são
eiz − e−iz
,
2i
iz
−iz
e +e
,
cos z =
2
sin z =
24
(45)
(46)
que contêm a fórmula de Euler,
e±iz = cos z ± i sin z.
Igualmente, definimos as funções hiperbólicas por
ez − e−z
,
2
ez + e−z
cosh z =
.
2
sinh z =
(47)
(48)
Inversamente,
e±z = cosh z ± sinh z.
No plano complexo, as funções trigonométricas e as funções hiperbólicas são
essencialmente as mesmas.
1.14
Aplicação da propriedade harmônica de uma função
analítica
Vimos que as partes reais e imaginárias de uma função analítica são funções
harmônicas. As funções harmônicas aparecem freqüentemente nos problemas
de física. O mais conhecido é o potencial para o campo eletrostático. Suponha
que é dada uma distribuição de densidade de carga elétrica (estática)
ρ = ρ (r) .
Sabemos que, pela Lei de Gauss, o campo elétrico E = E(r) satisfaz
I
1
E · dS = QΩ ,
ε0
(49)
Ω
onde Ω representa um domínio no espaço. A integração do lado esquerdo representa a integração de área sobre toda a área do domínio Ω e QΩ é a carga total
contida neste domínio. Podemos expressar a carga total dentro do domínio Ω
pela integral de volume da densidade de carga,
Z
QΩ =
ρ d3 V.
(50)
Ω
Mas, pelo Teorema de Gauss,
I
Z ³
´
E · dS =
∇ · E d3 V.
Ω
Ω
Exercício 42: Prove o teorema de Gauss, Eq.(51).
25
(51)
Substituindo as Eqs.(50,51), temos
¶
Z µ
1
∇ · E − ρ d3 V = 0.
ε0
Ω
Note que esta equação deve valer para qualquer Ω arbitrário. Concluímos que
temos que ter
1
(52)
∇ · E − ρ = 0.
ε0
Por outro lado, pela lei de Faraday, a variação de fluxo magnético gera uma
corrente elétrica de acordo com
Z
I
∂B
dS ·
(53)
= − E · dl,
∂t
S
S
onde a integral do lado esquerdo representa a integral de área numa superfície
S e a integral do lado direito é a integral de linha ao longo do contorno da
superfície S. Mas, como o teorema de Stokes diz
Z
I
³
´
dS · ∇ × E ,
(54)
E · dl =
S
S
temos
Z
s
dS ·
Ã
∂B
+∇×E
∂t
!
= 0.
Já que esta equação vale para qualquer superfície arbitrária, temos que ter
∂B
+ ∇ × E = 0.
∂t
(55)
Em particular, para o caso estático,
∂B
= 0,
∂t
e portanto
∇ × E = 0.
(56)
Exercício 43: Prove o teorema de Stokes, Eq.(54).
Como o rotacional do campo elétrico se anula no caso estático, existe um
campo escalar ϕ = ϕ (r) tal que
E = −∇ϕ.
Substituindo esta expressão na Eq.(52), temos
∇2 ϕ = −
26
1
ρ.
ε0
(57)
Em particular, se ρ = 0, então
∇2 ϕ = 0,
ou
µ
∂2
∂2
∂2
+
+
∂x2 ∂y 2 ∂y 2
¶
ϕ = 0.
Se não há dependência em z (não o número complexo, mas o terceiro eixo!),
temos
µ 2
¶
∂
∂2
+
ϕ = 0.
(58)
∂x2 ∂y 2
Um outro problema em que aparece a função harmônica é o movimento de
fluidos. Vamos considerar um fluido perfeito. A dinâmica do fluido pode ser
descrita em termos da distribuição de densidade,
ρ = ρ (r, t) ,
e do campo de velocidades,
v = v (r, t) .
Quando o movimento do fluido possui vórtice, a integral em volta do vórtice ao
longo do movimento do fluido
I
d l · v,
(59)
Γ
onde Γ representa uma curva fechada, certamente tem um valor positivo, pois
sempre podemos escolher
d l · v > 0.
Desta forma, quando existe um vórtice, a integral Eq.(59) não é nula. A integral
é chamada de “circulação”. Quando a circulação é nula para todo espaço, temos
I
d l · v = 0, ∀ Γ,
Γ
e então usando o teorema de Stokes,
I
d S · (∇ × v) = 0,
∀
Γ
Γ
onde S é a superfície cercada pela curva Γ. Como Γ é arbitrário, temos
∇ × v = 0,
∀
r.
Quando acontece isto, dizemos que o movimento de fluido é irrotacional e existe
uma função escalar ϕ tal que
v = ∇ϕ.
(60)
A função ϕ é chamada de potencial do campo de velocidade v.
27
O movimento de um fluido, em geral, conserva a massa (ou número de
partículas), e, portanto, satisfaz a equação de continuidade,
∂ρ
+ ∇ · (ρv) = 0.
∂t
(61)
Exercício 44: Deduza a equação de continuidade acima.
Suponhamos que o fluido é imcompressível. Neste caso, a densidade ρ é uma
constante,
ρ = ρ0 .
Então, da Eq.(61), temos
∇ · v = 0.
(62)
Substituindo a Eq.(60) na Eq.(62), temos
∇2 ϕ = 0.
Isto é, quando um fluido incompressível tem movimento irrotacional, o potencial
do campo de velocidade é uma função harmônica. Quando o fluido é homogêneo
na direção Z, então temos a equação Eq.(58).
A equação (58) é válida tanto no caso de campo elétrostático sem fonte,
quanto para o potencial de campo de velocidade irrotacional e imcompressível.
Naturalmente, se houver fonte, ou carga, a Eq.(58) não é satisfeita. Analogamente para um fluido cujo movimento é rotacional, ou a densidade é variável,
não vale a Eq.(58). Por exemplo, vamos considerar uma função,
w = C log z,
onde C é uma constante. Colocando
w = u + iv,
z = x + iy,
temos
u = log kzk = log C + log
y
v = arg z = tan−1 .
x
p
x2 + y 2 = log r + Const,
Vamos escolher
ϕ = A u (x, y) ,
onde A é uma constante a ser determinada. Fazendo com que este ϕ seja um
potencial eletrostático, temos o campo elétricocorrespondente,
1
E = −∇ϕ = −A er ,
r
(63)
p
onde r = x2 + y 2 é a distância radial da origem e er é um vetor unitário
radial. Assim, o campo elétrico está sempre
na direção radial e tem a mesma
p
intensidade para o mesmo valor de r = x2 + y 2 (ver a figura abaixo).
28
r=const.
σ
y
E
x
Fig. 4 Campo Elétrico em torno de linha reta carregada homogeneamente.
Considerando a integral do campo E sobre a superfície de um cilindro de raio r
e comprimento L, temos
2πrLE = −2πLA = const.
Pela Lei de Gauss, isto tem que ser igual à carga total dentro do cilindro. Desta
forma, concluímos que a situação física correspondente à Eq.(63) é o campo
gerado por um fio infinito, carregado homogeneamente, com densidade linear
σ = −2πAε0 .
Daí, temos
A=−
σ
.
2πε0
Podemos interpretar a mesma solução como o campo de velocidades de um
fluido incompressível e irrotacional. Fazendo
ϕ = u (x, y) ,
o campo de velocidades fica
v = ∇ϕ.
Novamente, a velocidade é radial, saindo da origem. A situação física corresponde a um sistema com uma fonte de fluido na origem, com taxa constante,
no qual o fluido escoa no plano x − y espalhando homogeneamente.
Nas duas interpretações acima, note que o ponto de origem r = 0 é um ponto
singular da solução.
Exercício 45: Podemos escolher v = ϕ. Interprete a situação física correspondente a
esta escolha.
29
Exercício 46: Desenhe as linhas equipotenciais (ϕ = const. seja ϕ = u, ou ϕ = v) da
função harmônica dada pelas seguintes funções complexas e interprete a
situação física:
u + iv = log(z + 1) − log(z − 1),
u + iv = z 2 ,
u + iv = z 1/2 .
1.15
Funções Plurívocas e Superfície de Riemann
Uma função de z pode ter múltiplos valores para um dado z como no exemplo
f (z) = z 1/2 ,
ou
f (z) = log(z).
No caso de log (z) , já que
f (z) = log kzk + i arg z,
dependendo de como se mede o ângulo de z no plano (x, y) , o valor de f muda.
Por exemplo, para um dado z, o ângulo pode ser o valor principal de
³y´
tan−1
,
x
mas também vale
tan−1
³y´
+ 2nπ,
x
para qualquer n inteiro. Por outro lado, é importante ter a correspondência um
a um para se definir a analiticidade do mapeamento de z para w. Assim, de
acordo com a necessidade, introduzimos mais planos (x, y) para z. Por exemplo,
no caso de log (z) , para cada volta do vetor z em torno da origem, em vez de
voltar ao mesmo plano (x, y) , entra na folha acima, como é mostrado na figura
abaixo.
Fig. 5 Superfície de Riemann para a função log (z).
30
ou
Fig. 6 Idem a Fig.5
O espaço onde z é definido fica generalizado o plano (x, y). Em vez de uma folha
plana, é agora as várias folhas subindo na forma espiral indefinidamente. Neste
espaço, a função log (z) é definida univocamente. Este espaço para a variável
z onde a função é definida univocamente é chamado de folha (superfície) de
Riemann.
A estrutura topológica da superfície de Riemann depende da função. No
caso de log(z), precisamos de infinitas folhas espiralmente enroladas em torno
da origem. Mas, para a função f (z) = z 1/2 , a superfície se torna a folha original
quando se faz duas voltas em torno da origem. Ver a figura abaixo.
Fig. 7 Superfície de Riemann para a função z 1/2 .
Exercício 47: Que tipo de função cuja superfície de Riemann é demostrada na figura (o
espaço em torno da origem é para facilitar a visão e não tem significado
aqui)?
31
Fig. 8 Superfície de Riemann que tem 3 folhas.
Exercício 48: Desenhe a superfície de Riemann para as seguintes funções:
1.16
¢1/2
¡
,
f (z) = 1 − z 2
¡ 2
¢1/2
f (z) = z − 1
.
Problemas
1. Consideremos uma série
S1 (z) = 1 + z + z 2 + z 3 + · · · + z n + · · ·
e definamos
Sp (z) = (S1 (z))p ,
onde p é um número inteiro maior que zero.
(a) Pela indução matemática em relação a n, mostre que
1+p+
=
p(p + 1)
p(p + 1) (p + 2) · · · (p + n − 1)
+ ··· +
2!
n!
1
(p + 1) (p + 2) · · · (p + n) .
n!
(b) Usando o resultado acima, mostre que
Xµ p+n−1 ¶
zn,
Sp (z) =
n
n≥0
onde
µ
k
n
¶
= Cn,k =
é o número combinatório.
32
k!
n! (n − k)!
(c) Pela definição, sabemos que
Sp (z) Sq (z) = Sp+q (z)
para p, q inteiros positivos. Usando este fato, demostre que
X µ p + l − 1 ¶µ q + n − l − 1 ¶ µ p + q + n − 1 ¶
=
l
n−l
n
0≤l≤n
2. Sejam x, y reais e n inteiro positivo e x 6= 2πk (k inteiro). Mostre que
¢
¡
¢
¡
n
X
cos n2 x + y sin n+1
2 x
¡x¢
cos (px + y) =
,
sin 2
p=0
¢
¡
¢
¡
n
X
x
sin n2 x + y sin n+1
2
¡ ¢
sin (px + y) =
.
sin x2
p=0
(dica: use a fórmula de Euler e a série geométrica).
3. Usando a definição, Eqs.(47,48), mostre que
sin (iz) = i sinh(z),
cos(iz) = cosh(z).
Mostre também que
cos2 (z) + sin2 (z) = 1,
cosh2 (z) − sinh2 (z) = 1.
4. Para x real, mostre que
³
´
p
sinh−1 x = log x + x2 + 1 ,
³
´
p
cosh−1 x = log x + x2 − 1 ,
tanh−1 x =
1
1+x
log
.
2
1−x
5. Para z = x + iy,
(a) Mostre
ksin zk2 = sin2 x + sinh2 y,
kcos zk2 = cos2 x + sinh2 y.
(b) Determine os zeros das funções
sin (az) , cos (az) ,
sendo a real.
33
6. Vamos resolver a equação algébrica de terceira ordem,
x3 + ax2 + bx + c = 0.
(a) Pela mudança de variável,
z = x + d,
e escolhendo d adequadamente, podemos sempre transformar a equação
acima em
z 3 + pz + q = 0.
(64)
(forma padrão para a equação de terceira ordem).
(b) Introduzimos ainda a nova mudança de variável,
µ
¶
1
u t+
= z,
t
e, substituindo na Eq.(64), teremos termos t3 , 1/t3 , t, 1/t e const.
Escolhendo u apropriadamente, podemos eliminar os termos t e 1/t.
Determine u.
(c) A equação que resta tem a forma
t3 +
1
= Const.
t3
Chamando t3 = X, a equação se reduz a uma equação de segunda
ordem em X. Resolva a equação.
(d) Expresse as 3 soluções explicitamente em função de p e q.
1.17
Integral de uma função de variável complexa
Para uma função de variável real, a integral é definida como o limite de n → ∞
da soma,
n
X
f (xi ) dxi
i=1
onde
n
X
i=1
dxi = b − a,
Este é um exemplo de integral de linha, onde, neste caso, a linha é uma reta,
ou seja o eixo x. No caso da variável complexa, o plano z tem duas dimensões
e, portanto, para definir a integral tipo
Z
f (z) dz,
34
devemos especificar uma trajetória de z durante a integração. Para isto, denotamos um caminho C abaixo do sinal de integral, que fica
Z
dz f (z) = lim
N →∞
C
N
X
f (zi )dzi ,
n
onde N é o número de segmentos que divide a curva C, e dzi é o intervalo
(complexo) correspondente a esse segmento. Ou seja, esta integral é definida
como o limite da soma dos valores da função f (z) multiplicado pelo passo dz,
ao longo da curva C como ilustrado na figura abaixo.
y=Im(z)
dy
dz=dx+i dy
C
dx
x=Re(z)
Fig.9 Integral de linha no plano complexo.
Separando a parte real e a parte imaginária, a integral acima fica
Z
Z
f (z) dz =
(u (x, y) + iv (x, y)) (dx + idy)
Z
ZC
(udx − vdy) + i
(vdx + udy) .
=
C
(65)
C
Para se ter uma melhor visualização, vamos introduzir a notação vetorial que
já introduzimos anteriormente.
⎛
⎞
v (x, y)
A = ⎝ u (x, y) ⎠ ,
0
Vimos que as condições de Cauchy-Riemann ficam
∇ · A = 0,
e
∇ × A = 0.
35
A parte real da Eq.(65) fica
Z
Z
(udx − vdy) =
(Ay dx − Ax dy) .
C
(66)
C
Aqui, não há dependencia na terceira componente do vetor r, mas vamos imaginar que existe o terceiro eixo ζ (seria z, mas usamos o símbolo ζ para evitar
a confusão com z do número complexo). Todas as quantidades são constantes
nesta direção.
y=Im(z)
C
C´
x=Re(z)
dζ
ζ
Fig. 10 Extensão da Fig.9 na direção perpendicular ao plano (x, y).
Ou seja, introduzimos uma nova direção perpendicular ao plano complexo (x, y)
e consideramos a fita formada de curvas C no plano (x, y) original e outra idêntica C 0 , mas deslocada na direção ζ por dζ (ver, na figura acima, a área tracejada). O vetor normal do elemento de área nesta fita, formado de deslocamento
dz = (dx, dy) no plano z e dζ na direção ζ é
⎛
⎞
dydζ
dS = ⎝ −dxdζ ⎠ .
0
Assim, a parte real, Eq.(66) pode ser escrita como
Z
Z
1
(Ay dx − Ax dy) = −
dS · A
dζ S
C
(67)
onde S representa a área da fita.
Vamos considerar a parte imaginária da 65. A parte imaginária fica escrita
como
Z
Z
(vdx + udy) =
A · dr,
(68)
C
C
36
já que a componente ζ de A é nula. Quando a curva C é uma curva fechada,
então
I
I
(vdx + udy) = A · dr
C
C
mas, usando o teorema de Stokes, temos
I
Z Z ³
´
(vdx + udy) =
∇ × A · dσ,
S
C
onde S é a superfície arbitrária cujo contorno é a curva C, e dσ é o elemento de
superfície. Como ∇ × A = 0 pelas condições de Cauchy-Riemann, temos
I
(vdx + udy) = 0.
C
Para a parte real, (67),
I
(udx − vdy) = −
C
1
dζ
I
dS · A,
S
onde S agora representa a superfície do cilindro formado pela fita C e C 0 . Completamos os dois lados do cilíndro sem alterar a integral, pois a componente de
A é nula na direção ζ. Usando o teorema de Gauss, temos
I
Z Z Z
³
´
1
(udx − vdy) = −
dV ∇ · A ,
dζ
C
onde a integral de volume se refere ao volume do cilindro. Como ∇ · A = 0 pelas
condições de Cauchy-Riemann, temos
I
(udx − vdy) = 0.
C
Finalmente concluímos que, para uma curva fechada,
I
f (z) dz = 0,
(69)
C
se f (z) é analítica dentro da área com contorno sendo a curva C.
Baseamos a prova acima nos teoremas de Gauss e Stokes nas suas representações vetoriais, mas podemos provar, até mais diretamante, usando diretamente
as Eqs.(33,34). Lembramos que a integral no plano complexo é a integral de
linha, e, portanto, tem noção de direção. Por exemplo, as duas integrais ao
longo da mesma curva C, mas com direções opostas têm mesmo valor, exceto
pelo sinal.
Exercício 49: Prove a Eq.(69) diretamente da condição de Cauchy-Riemann, Eqs.(33,34),
sem usar o recurso da notação vetorial.
37
1.17.1
Cortes e Pontos de ramificação
O teorema de Cauchy, Eq.(69), tem um papel fundamental na teoria de funções
de variável complexa. Uma coisa que deve ser enfatizada é que, quando se aplica
o teorema acima, deve-se utilizar a superfície de Riemann de tal forma que a
função seja bem definida univocamente. Ou seja, quando há mais de uma folha
de Riemann para definir a função univocamente, o contorno da integral, C, tem
que ser definido em cada folha, e quando duas folhas se cruzam, a curva C tem
que acompanhar continuamente uma das folhas. Por exemplo, vamos considerar
a integral,
Z
I=
z 1/2 dz.
C
Como vimos, a superfície de Riemann para função, f (z) = z 1/2 é mostrada na
Fig.7, tendo duas folhas, que se cruzam no eixo x positivo.
1a Folha
2a Folha
Im(z)
Im(z)
A´
B
A
B´
Re(z)
Re(z)
Fig.11 Duas folhas de Riemann para função f (z) = z 1/2 . Cada folha tem corte
no eixo x positivo.
Para mostrar a estrutura da superfície de Riemann, freqüentemente se usa uma
figura como a Fig.11 acima. A variável z pode estar numa das folhas. Cada folha
tem corte no eixo x positivo, e o segmento A da primeira folha está conectado
continuamente no segmento A0 da segunda folha, e o segumento B 0 da segunda
folha está conectado com o segmento B da primeira folha. Definindo a função
f (z) = z 1/2 em cima desta superfície de Riemann, f (z) é analítica exceto no
ponto z = 0. O ponto z = 0 neste caso é chamado de ponto de ramificação.
Note que
1/2
1/2
6= lim (x + iy)
lim (x + iy)
y→+0
y→−0
numa mesma folha.
Para aplicar o teorema de Cauchy, a curva fechada tem que ser definida nesta
superfície. Assim, a curva como na figura abaixo,
38
Im(z)
C
I
Re(z)
II
Fig. 12 O contorno C para a integral
R
C
z 1/2 dz.
possui a região I e a região II que têm que estar em folhas distintas. Ou seja, se
π
0 ≤ arg z ≤
2
para o contorno enquanto integrando na região I, então devemos usar o ramo,
7π
≤ arg z ≤ 4π,
2
e não
3π
≤ arg z ≤ 2π.
2
Exercício 50: Efetue a integração de linha no plano complexo diretamente da integral
Z
z 1/2 dz
C
onde C é indicada na figura abaixo.
Im(z)
-1-i
r=const
r=const.
Re(z)
-2 - 2i
1-i
Fig. 13
39
2 - 2i
1.17.2
Pólos
A função
f (z) =
1
,
z − z0
onde z0 é uma constante (complexa) é analítica em todo plano, exceto no ponto
z = z0 . Um ponto singular isolado como este é chamado de pólo. Pelo teorema
de Cauchy, para qualquer contorno C que não contém o pólo, z = z0 , dentro, a
integral
I
f (z) dz = 0.
C
Im(z)
z = z0
Re(z)
C
Fig. 14 Contorno que não contém o pólo z = z0 .
Na figura acima, mostramos um exemplo deste contorno que não contém o pólo
z = z0 . O fato de que a integral se anula não depende da forma do contorno,
mas depende somente do fato de que o contorno contém o pólo dentro da sua
área interna ou não. Assim, podemos deformar o contorno arbitrariamente sem
alterar o valor da integral, desde que o contorno não atravesse o pólo. Assim, a
integral ao longo do contorno na figura abaixo também é nula.
40
Im(z)
z = z0
Re(z)
C
Fig. 15 Deformação do contorno sem alterar o valor da integral.
Mas, como mencionamos anteriormente, se houver o passo da integral de ida e
volta no mesmo caminho, a soma das integrais se anulam, pois a ida e volta tem
o mesmo valor de integral com sinais diferentes. Finalmente, podemos concluir
que mesmo que o domínio da integral tenha topologia multiplamente conexa,
para a integral sobre a curva fechada ao redor de um domínio que não contém
pólos, vale o teorema de Cauchy.
Im(z)
z = z0
Re(z)
C
As integrais se cancelam.
Fig. 16 Integral sobre o contorno de um domínio que é multiplamente conexo.
Note que a direção da integral do contorno interno é a oposta da do externo.
No exemplo acima, a integral pode ser decomposta em duas partes: uma sendo
a integral ao longo do contorno externo e outra, a integral ao longo do contorno
interno, com a direção contrária. Temos
I
I
I
f (z) dz =
f (z) dz −
f (z) dz = 0.
C
ext.
int.
41
Desta forma, concluímos que
I
I
f (z) dz =
ext.
f (z) dz.
int.
Como as formas dos contornos externos e internos são arbitrárias, podemos concluir que a integral em torno de um pólo tem um valor constante, independente
da forma do contorno.
Usando este fato, podemos calcular a integral
I
f (z) dz,
C
onde C é um contorno que contém o pólo z = z0 . Já que o valor da integral não
depende da forma do contorno, podems escolher o contorno circular de raio R
com o centro z = z0 .
I
I
1
f (z) dz =
dz.
(70)
z − z0
C
|z−z0 |=R
Já que |z − z0 | = R, podemos parametrizar z por
z − z0 = R eiθ .
Com isto, temos
dz = iR eiθ dθ,
e portanto
I
|z−z0 |=R
1
dz =
z − z0
Z
2π
0
= 2πi.
iR eiθ
dθ
R eiθ
(71)
Note que o resultado da integral não depende do valor do raio R, o que já
era esperado (não depende do contorno).
Exercício 51: Usando a mudança de variável,
z = R eiθ ,
calcule a integral
Z
z 1/2 dz,
C
onde C é a circunferência de raio R centrada na origem, com o ponto
inicial zi = R + i 0 e o ponto final zf = R − i 0 como ilustrado na figura
abaixo. Interprete o resultado em relação ao teorema de Cauchy.
42
Im(z)
R
z=R+0 i
z=R - 0 i
Re(z)
Fig.17 Caminho de integração.
1.18
Função primitiva
Para uma função analítica, pelo teorema de Cauchy, a integral sobre uma curva
fechada é nula. Vamos considerar as duas integrais através de diferentes caminhos, C1 e C2 , mas ambas de um certo ponto comum, z = a, até o ponto
z = z.
Z z
I1 (z : C1 ) =
f (z) dz,
a, C1
Z z
I2 (z : C2 ) =
f (z) dz.
a, C2
A diferença
I1 (z : C1 ) − I2 (z : C2 ) =
=
Z
z
a, C
Z z 1
a, C1
=
I
f (z) dz −
f (z) dz −
Z
z
a, C
Z a 2
f (z) dz
f (z) dz
z, C2
f (z)dz
C1 +C2
= 0,
se f (z) é analítica dentro do domínio cujo contorno é a curva fechada, formada
por C1 (ida) e C2 (volta) . Concluímos que a integral
Z z
f (z) dz
a, C1
43
na verdade não depende do caminho, desde que f (z) seja uma função analíica.
Isto implica que a integral depende só do valor dos pontos inicial e final. Podemos
escrever
Z z
F (z) =
f (z) dz.
(72)
a
Podemos mostrar que
dF (z)
= f (z) .
(73)
dz
Como no caso da função de variável real, chamamos F (z) de função primitiva
de f (z) .
Exercício 52: Mostre que as partes real e imaginária da função F (z) definida na Eq.(72)
satisfazem as condições de Cauchy-Riemann, e, portanto, F (z) é uma
função analítica.
Exercício 53: Prove a Eq.(73).
Da Eq.(73), podemos obter a função primitiva de uma dada função de uma
variável complexa em termos de função primitiva no caso de variável real. Por
exemplo,
Z z
1
dz = log (z) ,
(74)
z
Z z
1
z α dz =
(75)
z α+1 , α 6= −1.
α+1
..
.
Exercício 54: Usando a Eq.(74), mostre que
I
1
dz = 2πi.
z
Ω30
1.19
Fórmula Integral de Cauchy
Quando existem alguns pontos singulares ou cortes, naturalmente a afirmação
acima deve ser alterada. Por exemplo, seja o integrando uma função analítica,
exceto pelo ponto z = z0 , que é um pólo da função. Podemos considerar então
a integral
Z b
f (z)
dz,
z
− z0
a
onde f (z) é uma função analítica em todo espaço complexo. Na figura abaixo,
as integrais
Z b
f (z)
dz
z
− z0
a
para o grupo de caminhos {C1 , C2 , C3 } (linhas contínuas) têm mesmo valor, e
idem para o outro grupo {D1 , D2 , D3 } (linhas tracejadas), embora sejam diferentes entre os dois grupos.
44
Im(z)
D2
z=b
Polo
z=z0
D1
Re(z)
C2
C3
D3
C1
z=a
Fig. 18 Os caminhos C1 , C2 e C3 resultam no mesmo valor da integral e idem
para D1 , D2 e D3 , mas existem valores distintos entre os grupos de caminhos
C 0 s e D0 s, devido à presença do pólo em z0 .
Para calcular a diferença, devemos calcular a integral em volta do pólo z = z0 ,
I
f (z)
dz,
I=
z − z0
z0 ∈Ω
onde a integral é feita em torno de um domínio Ω que contém o pólo z = z0 . Já
que o integrando f (z) /(z − z0 ) é analítico exceto em z = z0 , podemos usar o
mesmo argumento usado para a Eq.(70), e escolhemos como a curva fechada a
circunferência de raio R,
I
f (z)
I=
dz.
z − z0
|z−z0 |=R
como o valor da integral não deve depender do raio, podemos escolher R infinitesimalmente pequeno,
I
f (z)
I = lim
dz.
R→0
z − z0
|z−z0 |=R
Este limite pode ser calculado da seguinte forma:
I
f (z) − f (z0 ) + f (z0 )
dz
I = lim
R→0
z − z0
|z−z0 |=R
= lim
I
R→0
|z−z0 |=R
= lim
I
R→0
|z−z0 |=R
f (z) − f (z0 )
dz + f (z0 ) lim
R→0
z − z0
I
|z−z0 |=R
f (z) − f (z0 )
dz + 2πi f (z0 ) ,
z − z0
45
1
dz
z − z0
onde utilizamos o resultado da Eq.(71). O primeiro termo no limite de R → 0
se anula. Isto porque, se R → 0, então f (z) − f (z0 ) → 0, já que f (z) é
analítica. Naturalmente só este fato não garante que a integral se anula, pois o
denominador também tende a zero. Mas a circunferência da integral também
tende a zero, portanto, no total, a integral deve tender a zero. Tendo esta idéia,
podemos prosseguir com o seguinte argumento.
¯
¯
¯
¯
¯
¯
I
I
¯
¯ f (z) − f (z0 ) ¯
f (z) − f (z0 ) ¯¯
¯
¯
¯
dz ¯ ≤ lim
dz
¯ lim
¯
¯
¯R→0
¯ R→0
z − z0
z − z0
¯
¯
|z−z0 |=R
|z−z0 |=R
¯
¯
I
¯ 1
¯
¯
¯
≤ lim max |f (z) − f (z0 )|
dz
¯
R→0
z − z0 ¯
|z−z0 |=R
Z
2π
1
Rdθ
R
0
= 2π lim max |f (z) − f (z0 )| → 0.
= lim max |f (z) − f (z0 )|
R→0
R→0
Finalmente, temos a fórmula integral de Cauchy para uma função analítica em
Ω,
I
f (z)
dz.
2πi f (z0 ) =
z − z0
Ω 3 z0
Como z0 é arbitrário, podemos substituir z0 por z e, ao mesmo tempo, z por
z 0 , obtendo a forma conhecida como a fórmula integral de Cauchy
I
f (z 0 ) 0
1
(76)
f (z) =
dz .
2πi
z0 − z
Ω 3 z
A equação acima vale para qualquer função f (z) desde que seja analítica no
domínio Ω. Inversamente, se uma função f (z) satisfaz a equação (76) para
qualquer z dentro de um domínio Ω, podemos concluir que f (z) é analítica em
Ω.
A fórmula acima pode ser usada para expressar a derivada de uma função
na forma integral. Se tomarmos a derivada em relação a z dos dois lados da
Eq.(76) acima, obtemos
I
df (z)
1
f (z 0 )
dz 0 .
=
dz
2πi
(z 0 − z)2
Ω 3 z
Analogamente, a n-ésima derivada fica
I
dn f (z)
n!
=
dz n
2πi
Ω 3 z
46
f (z 0 )
(z 0 − z)
n+1 dz
0
.
(77)
Exercício 55: Efetuando integral de linha no plano complexo explicitamente, verifique
que
I
1
f (z 0 ) 0
f (z) =
dz .
2πi
z0 − z
|z 0 −z|=R
para
f (z) = z 2 ,
f (z) = exp (z) .
Dica: Use a mudança de variável, z 0 = z + R eiθ .
1.20
Série de Taylor
A fórmula integral de Cauchy pode ser usada para obter a expansão em série de
potências de z de uma função analítica f (z) em torno de um ponto arbitrário
z = a. Para isso, deve-se observar que
z0
1
1
= 0
−z
z − a − (z − a)
1
= 0
(z − a) (1 − zz−a
0 −a )
=
∞
n
X
(z − a)
n=0
(z 0 − a)n+1
,
(78)
para |z − a| suficientemente pequeno.
Exercício 56: Verifique a expansão, Eq.(78).
Substituindo a Eq.(78) na Eq.(76),
1
f (z) =
2πi
I
Ω 3 z
∞
n
X
(z − a)
n+1
0
n=0 (z − a)
f (z 0 ) dz 0 .
Supondo que a convergência é homogênea, trocando a soma e a integral, temos
I
∞
1 X
n
f (z) =
(z − a)
2πi n=0
Ω 3 z
f (z 0 )
(z 0 − a)
n+1 dz
Mas usando a Eq.(77), temos
f (z) =
∞
X
1 dn f (a)
(z − a)n ,
z
n!
dz
n=0
47
0
.
que é a série de Taylor da função f (z) em torno do ponto z = a. O raio de
convergência pode ser calculado pelo critério de Cauchy para uma série,
¯
¯
¯ an ¯
¯
¯
R = lim ¯
n→∞ an+1 ¯
¯
¯
¯ dn f (a) /dz n ¯
¯.
= lim (n + 1) ¯¯ n+1
n→∞
d
f (a) /dz n+1 ¯
Dentro do raio de convergência, a função f (z) é analítica.
1.21
Continuação Analítica
Um dos conceitos importantes para funções de um variável complexa é a continuação analítica. Usando a continuação analítica, podemos extender uma função
definida num domínio limitado para outro domínio. Para isto, começamos com
o seguinte teorema.
Teorema: Em um domínio D conexo, consideremos uma função analítica f (z). Seja
z0 ∈ D. As seguintes condições são equivalentes entre si:
(a) Para um número inteiro n ≥ 0 arbitrário,
dn f (z0 )
= 0.
dz n
(b) f (z) é identicamente nula em uma vizinhança de z0 .
(c) f (z) é identicamente nula no domínio inteiro D.
Isto é, a função analítica que é nula em um domínio finito é identicamente
nula sempre. Este fato pode ser usado para o princípio de continuação analítica.
Princípio de Continuação Analítica: Seja D um domínio conexo. Se duas funções analíticas f (z) e g (z) coincidem em uma vizinhança de um ponto z0 ∈ D, então f e g são idênticas
em D.
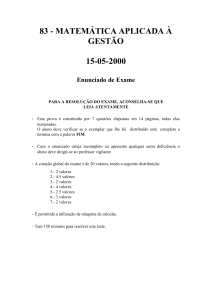
Por exemplo, vamos considerar as seguintes séries.
f (z) =
∞
X
zn,
n=0
∞
X
g(z) = i
n=0
in (z − 1 − i)n .
(79)
(80)
A série f (z) converge quando
kzk < 1,
ou seja, dentro do disco de raio 1 centrado na origem (o disco I da figura abaixo)
e a série g (z) converge quando,
kz − 1 − ik < 1,
48
Im(z)
z=1+i
II
I
Re(z)
z=1+0 i
z=0
Figure 2: Fig. 19 A série f (z) converge no disco I e a série g (z) converge no
disco II.
ou seja dentro do disco de raio 1 centrado no ponto z = 1 + i (o disco II da
figura abaixo). Mas quando a série converge,
f = 1 + z + z2 + · · ·
1
,
=
1−z
e, analogamente,
1
1 − i (z − 1 − i)
1
=
.
1−z
g=i
Assim,
f ≡g
na área onde ambas convergem, ou seja na área de superposição dos dois discos
acima. Desta forma, g é a continuação analítica da série f (z) do disco I para o
disco II, e vice versa. Ao mesmo tempo, a função
h (z) =
1
1−z
(81)
é a continuação analítica para o todo espaço das duas séries, f (z) e g (z).
Neste exemplo, as duas séries podem ser somadas para se obter uma expressão analítica, Eq.(81), mas, no caso geral, a soma da série não precisa necessariamente estar expressa em termos de uma função conhecida. Mesmo assim,
49
o procedimento de continuação analítica é sempre possível e, a partir de uma
série que converge num pequeno domínio, podemos construir uma função que
tem domínio estendido a todo espaço, exceto pontos singulares, tais como pólos
e cortes, emendando os discos de domínio de convergência um a um.
No exemplo acima, as séries, f (z) e g(z) são as expansões de Taylor da função
h(z) nos pontos z = 0 e z = 1 + i, respectivamente. Os raios de convergência
são ambos iguais a 1. Isto devido à existência do pólo, z = 1, da função h (z) .
Em geral, o raio da convergência de uma série de Taylor é determinado pela
presença do ponto não analítico da função mais próximo do ponto da expansão.
Por exemplo, se expandimos a função h (z) em torno do ponto z = −1, a série
tem o raio de convergência R = 2.
Exercício 57: Obtenha a expressão da série de Taylor da função Eq.(81) em torno do
ponto z = z0 e mostre que o raio de convergência é dado pela distância
entre os pontos, z = z0 e z = 1.
1.22
Série de Laurent
Quando existe um ou mais pólos, o raio do disco onde a série de Taylor converge
não pode ser maior que a distância ao pólo mais próximo. Ou seja, o domínio de
convergênicia sempre fica “barrado” pela existência de um pólo. Desta forma,
o domínio de convergência de uma série de Taylor não pode contornar um pólo.
Por outro lado, existe uma forma de série que converge dentro de um anel
excluindo o pólo da função.
Im(z)
z=a
R=|z0-a|
z=z0
R2
Re(z)
R1
Fig.20 Domínio para a série de Laurent para uma função que tem um pólo em
z = z0 . A série de Taylor em torno do ponto z = a converge dentro do disco
com o raio |a − z0 |.
Suponha que a função f (z) tenha um ponto singular em z = z0 . A série de
Taylor desta função em torno do ponto z = a só converge dentro do disco com o
50
raio R = |a − z0 |. Consideremos um anel em torno de z = z0 com o raio externo
R1 e o raio interno R2 e suponhamos que a função f (z) seja analítica dentro
deste anel.
Usando a fórmula integral de Cauchy, podemos escrever
I
1
f (z 0 ) 0
f (z) =
dz ,
2πi z 0 − z
Ω
onde Ω representa o anel e a integral deve ser feita ao longo dos contornos do
anel. Então, a expressão acima fica
I
I
1
1
f (z 0 ) 0
f (z 0 ) 0
−
(82)
f (z) =
dz
dz .
2πi
z0 − z
2πi
z0 − z
|z−z0 |=R1
|z−z0 |=R2
Agora, como vimos,
1
1
= 0
,
z0 − z
z − z0 − (z − z0 )
e, para |z 0 − z0 | > |z − z0 | , vale a expansão
1
1
1
= 0
0
z 0 − z0 − (z − z0 )
z − z0 1 − zz−z
0 −z
0
¶n
∞ µ
X
z − z0
1
.
= 0
z − z0 n=0 z 0 − z0
(83)
(84)
A condição |z 0 − z0 | > |z − z0 | é satisfeita só para o primeiro termo do lado
direito da Eq.(82), mas não para o segundo termo. Para o segundo termo,
|z − z0 | > |z 0 − z0 |, e temos que trocar a variável da expansão em série,
z0
1
1
=−
− z0 − (z − z0 )
z − z0 − (z 0 − z0 )
¶n
∞ µ
1 X z 0 − z0
=−
.
z − z0 n=0 z − z0
(85)
Agora, vamos substituir as Eqs.(84,85) nos lugares respectivos na Eq.(82). Temos
¶n
¶n
I
I
∞ µ
∞ µ
X
1
z − z0
1
1
1 X z 0 − z0
0
0
f (z ) dz +
f (z 0 ) dz 0
f (z) =
2πi
z 0 − z0 n=0 z 0 − z0
2πi
z − z0 n=0 z − z0
|z−z0 |=R1
=
∞
X
n=−∞
|z−z0 |=R2
cn (z − z0 )n ,
onde
cn =
1
2πi
(86)
I
|z−z0 |=R1
µ
1
z 0 − z0
51
¶n+1
f (z 0 ) dz 0 ,
(87)
para n ≥ 0 e
cn =
1
2πi
I
(z 0 − z0 )
−n−1
f (z 0 ) dz 0 ,
(88)
|z−z0 |=R2
para n < 0.
Note que, desta vez, não vale a fórmula, Eq.(77), pois a função f (z) não é
analítica em z = z0 . A série Eq.(86) é chamada de série de Laurent. Já que o
contorno da integração pode ser deformado arbitrariamente dentro do domínio
onde f (z) é analítica, as expressões (87,88) podem ser unificada simplesmente:
I
1
−n−1
cn =
(z 0 − z0 )
f (z 0 ) dz 0 , −∞ < n < ∞,
2πi
C
onde C é um contorno qualquer a volta do ponto z = z0 dentro do anel onde
f (z) é analítica.
Dependendo da função, a série de Laurent não necessariamente possuirá
todos os termos. Vamos considerar uma série de Laurent para uma função
f (z) em torno de um ponto z = z0 , inclusive sua vizinhança infinitesimalmente
próxima. Se esta série tem os termos de potência negativa em relação a (z − z0 ) ,
o ponto z = z0 é chamado pólo. Para um pólo de uma função, quando existe um
número N > 0, tal que para n < −N, todos os coeficientes se anulam, cn = 0,
então, o menor número N é chamado a ordem do pólo da função f (z). Uma
função que tem um pólo de ordem N em z = z0 , então, tem a forma,
f (z) =
∞
X
n≥−N
n
cn (z − z0 ) .
(89)
Naturalmente, quando a ordem do pólo da função f (z) for menor que zero, a
série de Laurent coincide com a de Taylor e a função é analítica em z = z0 . Note
que, para determinar a ordem de pólo da forma acima descrita, é importante
que a validade da série de Laurent se extenda até a vizinhança do pólo.
Uma mesma função pode ser expandida em série de Taylor e em série de
Laurent. Por exemplo, vamos considerar novamente a função
f (z) =
1
.
1−z
Já vimos que podemos expandir em série de Taylor em torno de z = 0,
f (z) = 1 + z + z 2 + · · · ,
que converge no disco de
|z| < 1.
52
(90)
Agora, podemos escrever também
1
1
z 1 − 1/z
¶
µ
1
1
1
=−
1 + + 2 + ···
z
z z
∞
X
1
=−
,
zn
n=1
f (z) = −
que converge em
|z| > 1,
(91)
(92)
que é a expansão de Laurent da função Eq.(90). Às vezes a forma Eq.(91) é
chamada de expansão de Taylor em torno de z = ∞. Como a validade da série
Eq.(91) não alcança a vizinhança do ponto z = 0, esta série não dá informaçã0
sobre a natureza do ponto z = 0. Na verdade, z = 0 é um ponto regular da
função, como sabemos da Eq.(90).
Quando uma série de Laurent em torno de um ponto z = z0 , incluindo sua
vizinhança arbitrária, não determina um valor finito N para que
cn = 0, ∀ n < −N,
a singularidade z = z0 é chamada de singularidade essencial. Um exemplo de
singularidade essencial é a função
1
ez
em z = 0. Temos, de fato, que a expansão
1
ez = 1 +
11
1 1
1 1
1 1
+
+ ··· +
+ ···
+
1! z
2! z 2 3! z 3
n! z n
converge absolutamente em todos os pontos, exceto em z = 0,
z 6= 0,
e, neste caso, o ponto z = 0 é a singularidade essencial.
Exercício 58: Obtenha a expressão de série de Laurent (ou Taylor) das funções abaixo
em torno do ponto indicado e indique o domínio de convergência.
sin z − z cos z
, z = 0.
z3
f (z) = cot z, z = 0.
1
f (z) = 2 tanh−1 z, z = 0
z
1
f (z) =
, z=1
1 − z2
1
f (z) = 2
. z = −1
z − 3z − 4
f (z) =
53
A série de Laurent (ou Taylor) existe somente para a singularidade isolada.
Não existe expansão em série de Laurent ou Taylor em torno de um ponto de
ramifição. Por exemplo, não existe a expansão em série de Laurent da função
f (z) = z 1/2 ,
em torno de z = 0. Mas se escolhermos a folha de Riemann apropriadamente,
podemos ter a série de Laurent ou Taylor em cima da linha de corte. Por
exemplo,
1
1 13
3
z 1/2 = 1 + (z − 1) −
(z − 1) + · · ·
2
2! 2 2
Exercício 59: Obtenha a expressão da série de Laurent das funções abaixo em torno de
z = 0 e determine o domínio de convergência:
¢1/2
¡
,
f (z) = z 2 − 1
¡
¢
1/2
g (z) = 1 − z 2
.
Exercício 60: No problema acima, podemos escrever (ou não)
¡
¢1/2
f (z) = −1 × (1 − z 2 )
1/2
= (−1) (1 − z 2 )1/2
= ig (z) ?
Se podemos, porque os resultados do problema anterior mudam para f e
g?
1.23
Teorema do Resíduo
Seja f (z) uma função analítica num domínio Ω, exceto em um pólo em z = z0
(singularidade isolada). Então, pelo teorema de Cauchy, a integral
I
f (z) dz
C
é nula quando a curva fechada não contém o pólo z0 . Quando a curva contém
o pólo, podemos escrever
I
I
f (z) dz =
f (z) dz
(93)
|z−z0 |=R
C
onde R é um número positivo arbitrariamente pequeno. Mas, na vizinhança do
pólo, podemos expandir a função em série de Laurent,
f (z) =
∞
X
n=−N
n
cn (z − z0 ) ,
54
onde N é a ordem do pólo. Assim,
I
I
∞
X
f (z) dz =
cn
|z−z0 |=R
n
|z−z0 |=R
n=−N
(z − z0 ) dz.
(94)
Agora, introduzindo a mudança de variável,
z − z0 = R eiθ ,
dz = iR eiθ dθ,
I
|z−z0 |=R
(z − z0 )n dz = iRn+1
Z
2π
dθ ei(n+1)θ
0
= 2πi δn+1,0 ,
(95)
onde δi,j é a delta de Kronecker, satisfazendo
δi,j = 0, i 6= j,
= 1, i = j.
Substituindo o resultado Eq.(95) na Eq.(94), temos
I
∞
X
f (z) dz =
cn × (2πi δn+1,0 )
|z−z0 |=R
n=−N
= 2πi c−1 .
Chamaremos o coeficiente c−1 de “resíduo” no pólo da função f (z) e escrevemos,
I
f (z) dz = 2πi Res f (z0 ).
(96)
|z−z0 |=R
Finalmente, temos o teorema do residuo,
I
f (z) dz = 2πi Res f (z0 ).
(97)
C
Quando há vários,digamos n, pólos dentro da curva C, podemos generalizar
a Eq.(96) por
I
n
X
f (z) dz = 2πi
Res f (zi ),
(98)
C
i=1
onde a soma é sobre todos os pólos zi , i = 1, ..., n, dentro da curva C.
1.23.1
Cálculo de resíduo
Como definimos, o resíduo do pólo de uma função f (z) é o coeficiente c−1 da
expansão de Laurent da função em torno do pólo. Na prática, podemos calcular
os pólos e resíduos de uma função do seguinte modo.
55
1. Obter os pólos como os zeros do inverso da função f (z) ,
1
= 0.
f (z)
2. Quando o pólo z = z0 tem ordem 1, então podemos escrever
f (z) =
1
g (z) ,
z − z0
onde g (z) é uma função analítica na vizinhança de z0 , inclusive g (z0 ) 6= 0.
Fazendo a expansão de Taylor da função g (z) em torno de z = z0 ,
¯
dg ¯¯
(z − z0 ) + · · · ,
g (z) = g (z0 ) +
dz ¯z=z0
identificamos,então, que o resíduo da função f (z) no pólo z = z0 é g (z0 ) .
Isto é equivalente a dizer que
Res f (z0 ) = lim (z − z0 ) f (z) .
z→z0
(99)
O resíduo também pode ser calculado por
Res f (z0 ) =
3. Se
f (z) =
d
dz
1
³ ´¯
1 ¯
f ¯
.
(100)
z=z0
Q (z)
,
P (z)
onde Q (z) e P (z) são analíticas em torno de z = z0 , e z = z0 é o zero de
ordem um da função P (z), então,
Res f (z0 ) =
Q (z0 )
¯
dP ¯
dz z=z0
.
(101)
4. Quando f (z) possui um pólo z = z0 de ordem k, podemos escrever
f (z) =
1
k
(z − z0 )
g (z) ,
onde g (z) é uma função analítica na vizinhança de z0 . Fazendo a expansão
de Taylor da função g (z) em torno de z = z0 até a ordem k − 1,
¯
dk−1 g ¯¯
1
k−1
g (z) = g (z0 ) + · · ·
(z − z0 )
+ ··· ,
(k − 1)! dz k−1 ¯z=z0
identificamos
Res f (z0 ) =
¯
dk−1 g ¯¯
1
,
(k − 1)! dz k−1 ¯z=z0
56
ou seja,
Res f (z0 ) =
i¯¯
dk−1 h
1
k
¯
)
f
(z)
.
(z
−
z
0
¯
(k − 1)! dz k−1
z=z0
(102)
Por exemplo vamos obter os resíduos de todos os pólos da função,
f (z) =
eiz
.
z(z 2 + 1)2
A função exponencial, eiz , não possui pólos a uma distância finita da origem.
Os pólos de f (z) vêm então do denominador. Temos os pólos
z = 0, ±i,
sendo que o pólo z = 0 é de ordem 1, e os pólos ±i têm ordem 2. O resíduo
para z = 0 fica
Res f (0) = lim (zf (z))
z→0
= 1.
Vamos calcular o resíduo para z = i. Poderíamos aplicar a fórmula Eq.(102) mas,
neste caso, é mais fácil como se segue. Primeiramente, fatora-se o denominador,
obtendo
eiz
f (z) =
.
z(z + i)2 (z − i)2
Assim,
g (z) = (z − i)2 f (z)
=
eiz
.
z(z + i)2
Queremos expandir g (z) em série de Taylor em torno de i. Para isto, é conveniente introduzir a mudança de variável
t = z − i,
z =t+i
e substituir em g (z) ,
ei(i+t)
(i + t) (2i + t)2
Expandimos cada um dos fatores em t,
¶
µ
1
ei(i+t) = e−1 1 + it − t2 + · · · ,
2
1
1
= (1 + it + · · · ) ,
i+t
i
1
1
2 = − 4 (1 + it + · · · ) ,
(2i + t)
g(z) =
57
e, portanto,
g(z) = −
=
1
4ie
¶
µ
1
1 + it − t2 + · · · (1 + it + · · · ) (1 + it + · · · )
2
i
(1 + 3it + · · · )
4e
Finalmente temos
3
.
4e
O resíduo para z = −i pode ser obtido analogamente.
Res f (i) = −
Exercício 61: Confira as Eqs.(100,101 e 102)
Exercício 62: Identifique todos os pólos das funções abaixo e obtenha os resíduos correspondentes.
f (z) =
f (z) =
f (z) =
f (z) =
f (z) =
f (z) =
f (z) =
f (z) =
f (z) =
f (z) =
1.24
1
,
z−1
1
,
(z − 2)2
sin z
,
z2
1
,
2
z − 3z + 2
1
,
2
a(z − (α + β) z + αβ)
e−x
,
z
1
,
tan z
eiz
,
4
z +8
1
eaz ,
z 3 (z + b)
1
, 0 < ε < 1.
1 + ε cos z
Aplicação do Teorema do Resíduo
O teorema de resíduo tem uma aplicação bastante útil. Vamos considerar, como
um exemplo, a integral
Z ∞
1
I=
dx.
(103)
1
+
x2
−∞
58
Esta integral é entendida como o limite em que R → ∞ da integral
IR =
Z
R
−R
1
dx.
1 + x2
(104)
A aplicação do método dos resíduos começa pela identificação da integral acima
como parte da integral complexa
I
1
IC =
dz,
2
C 1+z
onde a curva C é como ilustrado na figura abaixo.
Im(z)
C
z=i
x=R
x = -R
x=Re(z)
z=-i
Fig.22 Contorno para calcular a integral IC =
Podemos decompor a integral complexa em
H
1
dz.
C 1+z 2
IC = IR + Isemi−cı́rculo (R) ,
onde
Isemi−cı́rculo (R) = i
Z
π
dθ R eiθ
0
1
.
1 + R2 e2iθ
(105)
(106)
Exercício 63: Prove que
lim Isemi−cı́rculo (R) = 0.
R→∞
(107)
Mas, pelo teorema do resíduo, temos
IC = 2πi Res f (z0 ),
59
(108)
onde
1
,
1 + z2
e z0 é o pólo dentro da curva C. Neste caso, já que
f=
1
1
=
,
1 + z2
(z + i) (z − i)
o pólo dentro da curva C é
z0 = i
e
1
.
2i
Assim, combinando as Eqs.(105) e (108), temos
Res f (i) =
2πi
= IR + Isemi−cı́rculo (R) ,
2i
independentemente do valor de R. Tomando o limite R → ∞, o segundo termo,
Isemi−cı́rculo (R), se anula devido à Eq.(107) e IR tende ao valor da integral
desejada devido às Eq.(103) e Eq.(104). Finalmente, temos
Z ∞
1
dx = π.
(109)
1
+
x2
−∞
O resultado acima pode ser verificado pelo método usual de mudança de
variável.
Exercício 64: Usando a mudança de variável, obtenha a integral indefinida
Z
1
dx
1 + x2
e, usando o resultado, calcule o valor de
Z ∞
1
dx.
2
−∞ 1 + x
Exercício 65: Usando a curva fechada indicada abaixo, calcule a integral acima e confirme que o resultado é o mesmo valor já obtido ( tome cuidado com os
sinais e a direção da integral).
60
Im(z)
z=i
x = -R
x=R
x=Re(z)
z=-i
C
Fig.22 Contorno no semiplano inferior.
Exercício 66: Calcule as seguintes integrais:
Z ∞
−∞
∞
Z
−∞
∞
Z
−∞
1
dx,
+x+1
1
dx,
4
x +1
2x + 1
dx.
x4 + 1
x2
Os exemplos acima sugerem um método geral para usar o teorema do resíduo
para calcular uma integral definida. Vamos considerar uma integral
I[a,b] =
Z
b
f (x) dx,
(110)
a
onde a e b são números constantes. Suponhamos que sabemos todos os pólos e
resíduos da função f (z). O primeiro passo é introduzir um contorno fechado C
no plano complexo de z, de tal forma que o trecho em cima do eixo real contém
o segmento [a, b], e consideremos a integral,
I
IC =
f (z) dz.
(111)
C
Sabendo todos os pólos e os respectivos resíduos da função dentro do contorno
C, pelo teorema de resíduo, temos
X
IC = 2πi
Re s f (zi ) .
(112)
i
61
Pela contrução, a integral complexa IC pode ser decomposta em duas partes,
I
f (z) dz
IC =
C
= I[a,b] + IC 0 ,
onde
IC 0 =
Z
f (z) dz
(113)
(114)
C0
é a integral ao longo da curva C, excluindo o trecho do eixo real [a, b]. A ídeia
básica é escolher o contorno C 0 tal que a integral IC 0 se torne nula ou se reduza
a uma integral já conhecida. A curva C 0 pode ser composta de mais de um
trecho.
Vamos considerar alguns exemplos abaixo.
1.24.1
O intervalo [−∞, ∞]
Para calcular a integral do tipo
Z
∞
f (x)dx
−∞
pode ser utilizado o método que já foi mostrado no caso da Eq.(103). Este
método só vale quando a integral IC 0 se torna zero, ou algum valor finito que
pode ser obtido por outro método. Vamos considerar o exemplo
Z ∞
eikx
dx,
2
2
−∞ x + a
onde a e k são constantes reais positivas. Neste caso, podemos escolher o contorno da Fig. 21, ou seja, o semi-círculo no plano superior. Os pólos de f (z)
ficam em z = ±ia. Temos
I
Z R
Z
eikz
eikx
eikz
dz
=
dx
+
dz.
2
2
2
2
2
2
C z +a
C0 z + a
−R x + a
De um lado, pelo teorema de resíduo,
I
eikz
dz = 2πiRe s f (ia)
2
2
C z +a
e−ak
= 2πi ×
2ia
π −ak
= e
,
a
e de outro lado,
Z
Z 2π
eikz
eikR(cos θ+i sin θ)
dz
=
iR
dθ
2
2
R2 ei2θ + a2
C0 z + a
0
Z 2π
eikR cos θ −kR sin θ
= iR
dθ 2 i2θ
e
.
R e + a2
0
62
Podemos verificar que esta integral tende a zero para R → ∞, já que k sin θ ≥ 0.
Assim, temos
Z ∞
eikx
π
dx = e−ak .
2 + a2
x
a
−∞
Exercício 66: A integral acima pode ser calulada usando a curva fechada indicada na
fig.22?
Exercício 67: Calcule a integral
Z
∞
−∞
e−ikx
dx
x2 + a2
Como conseqüência do cálculo acima, podemos afirmar as seguintes propriedades gerais para uma integral do tipo
Z ∞
f (x) eikx dx.
−∞
Se f (z) não possui nenhum pólo em cima do eixo real, lim|z|→∞ f (z) → 0 e
k > 0, então
Z ∞
X
£
¤
f (x) eikx dx = 2πi
Res f (zi )eikzi ,
−∞
Im(zi )>0
onde o somatório é sobre todos os pólos no semi-plano superior de z. Como
a conseqüência imediata, se f (z) não possui nenhum pólo no plano superior,
inclusive no eixo real, então o valor da integral é nulo,
Z ∞
f (x) eikx dx = 0.
(115)
−∞
Analogamente, se lim|z|→∞ f (z) → 0, então
Z
∞
f (x) e−ikx dx = 2πi
−∞
X
Im(zi )<0
£
¤
Res f (zi )e−ikzi
onde o somatório é sobre todos os pólos no semi-plano inferior de z. Quando
f (z) não possui nenhum pólo no plano inferior, então
Z ∞
f (x) e−ikx dx = 0.
(116)
−∞
Estas propriedades Eqs.(115,116) têm papel muito importante na discussão de
propagação de ondas em relação à causalidade.
63
No lugar do fator eikx , podemos também considerar as integrais do tipo
Z ∞
f (x) cos kx dx,
−∞
Z ∞
f (x) cos kx dx,
Z0 ∞
f (x) sin kx dx,
−∞
Z ∞
f (x) sin kx dx.
0
Por exemplo,
Z ∞
Z
¡
¢
1 ∞
f (x) cos xdx =
f (x) eikx + e−ikx dx
2 −∞
−∞
¾
½Z ∞
Z ∞
1
=
f (x) eikx dx +
f (x) e−ikx dx
2
−∞
−∞
¾
½Z ∞
Z ∞
1
ikx
=
f (x) e dx +
f (−x) eikx dx
2
−∞
−∞
Z ∞
f (x) + f (−x) ikx
=
e dx.
2
−∞
Exercício 68: Calcule a integral
Z
∞
0
1.25
cos x
dx.
x2 + 1
Quando há pólo em cima do eixo real
Vamos considerar a integral
Z
∞
−∞
eix
dx.
x
Essa integral não é bem definida, pois, no ponto x = 0, a função 1/x não é
definida, e, dependendo de como ocorre a aproximação deste ponto, o valor da
integral varia. Para evitar tais problemas de indefinição, usualmente introduzimos o conceito de “valor principal ”
µZ −ε Z ∞ ¶ ix
Z ∞ ix
e
e
P
+
dx = lim
dx,
ε→0
x
−∞ x
−∞
ε
ou seja, os passos da integral se aproximam pelos dois lados do ponto x = 0
igualmente. Uma vez definido como se aproximar do pólo, podemos escolher o
caminho C como ilustrado na figura abaixo.
64
Im(z)
-ε ε
-R
R
Re(z)
Fig. 23 A curva que contorna o pólo em z = 0.
Temos
I
eiz
dz =
z
C
ÃZ
−ε
+
−R
Z
R
ε
!
+
Z
∩=ε
+
Z
,
(117)
∩=R
R
onde ∩=ε indica
a integral sobre o semi-círculo de raio ε, oR que vale analogaR
mente para ∩=R . Já
R vimos que a contribuição da integral ∩=R se anula para
R → ∞. A integral ∩=ε pode ser calculada por
Z
∩=ε
eiz
dz = i
z
Z
iθ
0
εeiθ
π
eiεe
dθ → −πi.
εeiθ
Como a integral do lado esquerdo da Eq.(117) é nula pelo Teorema de Cauchy
(não há nenhum pólo dentro do contorno), temos
ÃZ
Z R ! ix
−ε
e
0 = lim
+
dx − πi,
R→∞
x
−R
ε
e, portanto,
P
Z
∞
−∞
eix
dx = πi.
x
Exercício 69: É possível tomar o contorno abaixo para calcular a integral acima?
65
Im(z)
-R
ε
-ε
R
Re(z)
Fig. 24 Contorno que inclui o pólo z = 0 em seu interior.
Exercício 70: Obtenha o valor da integral,
Z
∞
0
sin kx
dx,
x
onde k > 0.
1.26
Integral do tipo
Vamos considerar a integral
I=
R 2π
0
Z
F (cos θ, sin θ)dθ.
2π
F (cos θ, sin θ)dθ.
0
Seja
z = eiθ ,
então
µ
¶
1
1
cos θ =
z+
,
2
z
µ
¶
1
1
sin θ =
z−
,
2i
z
e
dz = idθeiθ = iz dθ.
Assim, podemos considerar a integral I
um círculo de raio 1,
µ µ
I
1
1
I=
F
z+
i |z|=1
2
como a integral complexa ao longo de
1
z
66
¶
,
1
2i
µ
¶¶
1
dz
z−
.
z
z
Então, se a função
1
f (z) = F
z
µ µ
¶
µ
¶¶
1
1
1
1
z+
,
z−
2
z
2i
z
possui pólos dentro do círculo |z| = 1, temos
I = 2π
n
X
Res f (zi ).
i=1
Vamos ver um exemplo. Queremos calcular a integral
Z 2π
1
I=
dθ,
1 − ε cos θ
0
(118)
onde |ε| < 1. Como vimos, esta integral é equivalente a
I
1
dz
1
I=
i |z|=1 1 − ε (z + 1/z) /2 z
I
1
= 2i
dz
2 − 2z + ε
εz
|z|=1
A função
tem 2 pólos em
1
εz 2 − 2z + ε
o
p
1n
1 ± 1 − ε2 .
ε
Destes pólos, o que está dentro do círculo |z| ≤ 1 é
√
1 − 1 − ε2
.
ε
O resíduo fica
Finalmente, temos
1
.
− √
2 1 − ε2
2π
.
I=√
1 − ε2
1.27
Contorno Retangular
A integral acima pode ser feita de outra forma. Vamos considerar diretamente
a integral na forma
Z
1
dz
C 1 − ε cos z
e escolhamos a curva fechada como o retângulo indicado na figura abaixo.
67
Im(z)
0+iR
2π +iR
π + icosh-1(1/ε)
2π
0
Re(z)
Fig.25 Contorno para calcular a integral.
O pólo do integrando é determinado por
cos z =
1
,
ε
mas, como |ε| < 1, esta equação só tem solução para z complexo. Por simplicidade, vamos considerar o caso em que ε > 0. Escrevendo
z = x + iy,
temos
cos (z + iy) = cos x cosh y − i sin x sinh y =
1
.
ε
Portanto, temos
1
,
ε
sin x sinh y = 0.
cos x cosh y =
Assim,
sin x = 0,
cos x = 1,
1
cosh y = .
ε
(Se ε < 0, podemos escolher cos x = −1). No intervalo de 0 ≤ Re(z) ≤ 2π,
temos x = π e y = cosh−1 (1/ε) , portanto o pólo é
µ ¶
1
−1
.
z0 = π + i cosh
ε
68
O resíduo do integrando pode ser calculado por
¯
µ
¶
¯
1
1
¯
Res
= d
¯
¯
1 − ε cos z z0
(1
−
ε
cos
z)
dz
z0
=
=
=
=
1
ε sin z0
1
√
ε 1 − cos2 z0
1
p
ε 1 − 1/ε2
1
√
.
i 1 − ε2
Agora, vamos considerar a parte da integral correspondente ao lado vertical
direito do retângulo. Assim, temos
z = 2π + iy, 0 ≤ y ≤ R,
e temos
i
Z
0
R
1
dy = i
1 − ε cos (2π + iy)
=i
Z
R
0
Z
0
R
1
dy
1 − ε cos (iy)
1
dy.
1 − ε cosh (y)
Note que a integral ao longo do lado esquerdo do retângulo também tem a
mesma forma, só que a direção da integral é oposta em y,
Z 0
Z R
1
1
i
dy = −i
dy,
R 1 − ε cos (iy)
0 1 − ε cosh (y)
e, portanto, essas integrais se cancelam exatamente. A integral do topo do
retângulo fica
Z 0
Z 0
1
1
dx =
dx.
2π 1 − ε cos (x + iR)
2π 1 − ε {cos (x) cosh R − i sin x sinh R}
Esta integral se anula para R → ∞, devido aos fatores cosh R e sinh R que
tendem ao infinito. Desta forma, temos
Z 2π
Z
1
1
dz =
dx
1
−
ε
cos
z
1
−
ε
cos x
0
C
Ã
µ
¶ !
1
= 2πi × Res
1 − ε cos z z0
2π
=√
.
1 − ε2
69
Dependendo do integrando, devemos escolher o retângulo adequadamente.
Por exemplo, vamos calcular
Z ∞
1
I=
dx,
−∞ cosh ax
sendo a > 0. Considerando
cosh a (x + iy) = cosh ax cos ay + i sinh ax sin ay,
o pólo pode ser determinado por
cos ay = 0,
sinh ax = 0,
ou seja,
x=0
e
3
2m + 1
1
π, ...
ay = ± π, ± π, .., ±
2
2
2
O resíduo é, por exemplo,
¯
¶
µ
¯
1
1
¯
= d
Res
¯
¯
cosh az iπ/2a
dz cosh az
iπ/2a
1
=
a sinh (iπ/2)
1
= .
ia
Além disto, se escolhemos
y=
π
,
a
temos
cosh a (x + iy) → − cosh ax.
Com estas considerações, vamos escolher o contorno ilustrado na figura abaixo.
Im(z)
R-iπ/a
R+iπ/a
iπ/2a
R
-R
70
Re(z)
Fig. 26
Vemos que a integral ao longo do lado superior é exatamente igual à ao longo
do lado inferior (base do retângulo),
¯
Z −R
Z −R
1 ¯¯
1
dz
=
−
dx
¯ π
cosh
az
cosh
ax
R
R
y= a
Z R
1
dx,
=
cosh
ax
−R
e as integrais sobre os lados verticais se anulam no limite R → ∞, devido ao
fator 1/ cosh (R + iy). Assim,
I
C
Finalmente, temos
1
dz = 2 × lim
R→∞
cosh az
1
= 2πi × .
ia
Z
∞
−∞
1.28
Z
R
−R
1
dx
cosh ax
π
1
dx = .
cosh ax
a
Existência de ponto de ramificação e corte
Vamos considerar a integral do tipo
Z
I=
0
∞
R (x)
dx,
xα
onde R (x) é uma função racional que não tem pólo no eixo real positivo e
0 < α < 1 para garantir a existência (a convergência) no limite inferior, x → 0.
Para garantir a convergência no limite superior x → ∞, é suficiente e necessário
que
R (x)
1
< ,
xα
x
assintoticamente para x À 1. Ou seja, devemos ter
lim R (x) = 0.
x→∞
Tendo estas condições, vamos considerar o contorno indicado na figura abaixo.
71
Im(z)
R
ε
-R
Re(z)
Fig. 27 Contorno ao longo de um corte no eixo real.
Nesta figura, posteriormente, tomaremos os limites em que o raio externo R
tende ao infinito e o raio interno ε a zero. Assim, no trecho em cima do eixo
real positivo, o valor da variavel z é infinitesimalmente próximo a um valor real,
mas
z+ = x + iε,
já no trecho abaixo,
z− = x − iε.
Vamos escolher uma folha dos planos de Riemann onde o domínio cercado por
este contorno fica inteiramente nesta folha. Ou seja, escolhemos o ramo em que
0 < arg z < 2π.
Neste caso,
lim arg (x + iε) = 0,
ε→0
lim arg (x − iε) = 2π,
ε→0
e, portanto,
lim (x + iε)α = xα ,
ε→0
lim (x − iε)α = xα e2παi .
ε→0
O fator
1
xα
não possui pólo dentro deste domínio. Portanto, pelo teorema do resíduo, a
integral
µ
¶
I
X
R (z)
R (z)
dz = 2πi
Res
,
α
zα
C z
72
onde a soma é sobre todos os pólos dentro do domínio. Por outro lado, a integral
do lado esquerdo pode ser decomposta em
I
R (z)
dz =
zα
C
Z
Z
+
R
0
0
R
No limite em que R → ∞,
Z
e, no limite em que ε → 0,
Z
R (x + iε)
R (z)
dx
+
dz
α
α
(x + iε)
|z|=R z
Z
R (x − iε)
R (z)
dz
α dx +
α
(x − iε)
|z|=ε z
|z|=R
Z
|z|=ε
R (z)
dz → 0,
zα
R (z)
dz = 0,
zα
e ainda
Z
Z
R
0
0
−R
R (x + iε)
α dx →
(x + iε)
Z
∞
0
R (x − iε)
α dx → −
(x − iε)
Z
R (x)
dx,
xα
∞
e−2παi
0
R (x)
dx,
xα
e, finalmente, temos
ou
¢
¡
1 − e−2παi
Z
0
∞
Z
∞
0
X
R (x)
dx
=
2πi
Res
xα
µ
R (z)
zα
¶
µ
¶
X
R (z)
2πi
R (x)
Res
dx =
.
xα
1 − e−2παi
zα
Exercício 71: Obtenha o valor da integral,
Z ∞
0
1.29
dx
, 0 < α < 1.
xα (x + 1)
Pólo no infinito e esfera de Riemann
Pelo mapeamento
1
,
(119)
z
todos os pontos |z| → ∞ são mapeados na origem, z 0 = 0. Por outro lado, para
um mapeamento por uma função f,
z → z0 =
z → w = f (z) ,
73
podemos considerar o mapeamento
0
0
0
0
z → w = f (z ) = f
µ
1
z0
¶
.
Podemos discutir as propriedades analíticas da nova função f 0 (z 0 ) . Se f 0 for
analítica, dizemos que a função original, f (z) , é analítica em torno do ponto
infinito. Da mesma forma, se f 0 tem pólo de ordem n, dizemos que f (z) tem
pólo de ordem n no infinito.
A discussão acima sugere que, do ponto de vista da função complexa, todos
os pontos com |z| → ∞ (360o , ou seja, os pontos contidos na esfera de raio
infinito) se comportam como um ponto apenas e, portanto, em vez de um plano
complexo z, podemos imaginar um superfície onde os pontos infinitos convergem
para um ponto. Um exemplo deste tipo de superfície é a esfera de Riemann.
Vamos considerar uma esfera no espaço tridimensional, (x, y, ξ) (novamente,
usamos a variável ξ para representar a coordenada na direção do terceiro eixo,
Z), de raio 1,
S2 : x2 + y 2 + ξ 2 = 1.
Denotamos o pólo norte, (0, 0, 1) , por N , e o pólo sul, (0, 0, −1) , por N̄ . Escolhendo um ponto P = (x, y, ξ) na superfície, a extensão da reta P M cruza o
plano (X − Y ) no ponto A,
A:
1
(x, y, 0) ,
1−ξ
(120)
e, analogamente, a reta N̄ P cruza o plano (X − Y ) no ponto B, (ver a figura
abaixo)
1
(x, y, 0) .
(121)
B:
1+ξ
ξ
(0,0,1)
P(x,y,ξ)
A (x/(1-ξ),y/(1-ξ),0)
y
B (x/(1+ξ),y/(1+ξ),0)
(0,0,-1)
x
Exercício 72: Verifique as Eqs.(120,121).
74
Vamos associar então os dois números complexos para estes pontos,
1
(x + iy) ,
1−ξ
1
z2 =
(x + iy) .
1−ξ
z1 =
Podemos verificar que
z1 z2∗ = 1.
(122)
Exercício 73: Verifique a Eq.(122).
A discussão acima mostra que a superfície da esfera tem correspondência
um a um com o plano complexo, exceto nos pontos cuja distância à origem é
infinita. Mas, como vimos nas propriedades analíticas das funções complexas,
estes pontos podem ser idenficados por um único ponto. Pelo mapeamento
Eq.(119), podemos identificar o plano complexo como a superfície da esfera.
Esta superfície é chamada de superfície de Riemann.
2
Problemas
Além dos problemas abaixo listados, resolva todas as questões das páginas 118124 do livro do Butkov.
1. Seja C um contorno contínuo e C̄ o contorno correspondente no plano
mapeado por z → z ∗ (mapeamento simétrico em relaçao ao eixo real).
(a) Mostre que
µZ
f (z) dz
C
¶∗
(b) Se C é o círculo |z| = 1, então,
!∗
ÃZ
f (z) dz
|z|=1
=
Z
f ∗ (z ∗ ) dz.
C̄
=−
Z
f ∗ (z)
|z|=1
dz
.
z2
2. Para a, b reais e positivos, qual é a trajetória da variável z na representação
paramétrica
z (θ) = a cos θ + ib sin θ,
quando θ varia de θ = 0 a θ = 2π?
3. Calcule
Z
dz
,
C z
onde C é a trajetória do problema no 2, e mostre que
Z 2π
2π
dθ
=
.
2 cos2 θ + b2 sin2 θ
ab
a
0
75
4. A partir da integral
µ
µ
¶¶
f (z)
1
dz,
2± z+
z
z
|z|=1
I
onde f (z) é analítica dentro de um domínio que contém o disco |z| ≤ 1,
mostre que
¯
µ ¶
Z
2 2π ¡ iθ ¢ 2 θ
df (z) ¯¯
f e cos
,
dθ = 2f (0) +
π 0
2
dz ¯z=0
¯
µ ¶
Z
2 2π ¡ iθ ¢ 2 θ
df (z) ¯¯
f e sin
.
dθ = 2f (0) −
π 0
2
dz ¯z=0
5. Seja f (z) uma função analítica em torno da origem, sendo a origem o pólo
de ordem 1. Consideramos uma função
F (z; x) =
df (z)
dz
f (z) − x
,
onde x é um parâmetro complexo. Mostre que a série de Laurent da função
F (z; x) tem a forma
∞
1 X
F (z; x) = − +
ui (x) z i ,
z i=1
onde ui (x) é polinômio de ordem i de x, e calcule ui´s até i = 3.
6. Calcule as seguintes integrais.
Z ∞
dx
a, b > 0,
n,
(a + bx2 )
0
Z ∞
cos 2ax − cos 2bx
dx, (a, b, reais),
x2
0
Z ∞ 2
x − a2 sin x
dx, a > 0,
x2 + a2 x
0
Ã
!
Z
Z π
cos nθ
zn
dθ, a > 0.
Dica :
dz
2
0 1 − 2a cos θ + a
|z|=1 (z + a) (z + 1/a)
7. Seja f (z) = u (x, y) + iv (x, y) uma função analítica. Para cada u (x, y)
indicado abaixo, determine a função f (z) .
u (x, y) = sin x cosh y,
u (x, y) = ey
2
−x2
cos 2xy,
x
.
u (x, y) = 2
x + y2
76
8. A partir da diferenciabilidade de uma função f (z), ou seja, a existênia do
limite
f (z + dz) − f (z)
lim
dz→0
dz
independentemente da direção de dz, mostre que as partes real e imaginária da função f (z) = u(x, y)+iv (x, y) satisfazem a equação de Laplace,
∂2u ∂2u
+ 2 = 0,
∂x2
∂y
2
∂2v
∂ v
+
= 0.
∂x2 ∂y 2
Interprete as partes real e imaginária da função
1
f (z) = C z 2
do ponto de vista do campo elétrostático. Também interprete a situação
física do ponto de vista do fluxo de um fluido incompressível e irrotacional.
9. Considere a função
φ (x, y) = Im
com
µ
¶
2
log tanh z ,
π
z = x + iy
e x > 0. Interpretando esta função como potencial da velocidade, determine a situação física do ponto de vista do fluxo de um fluido incompressível e irrotacional.
10. Encontre o pólo e determine o resíduo correspondente das funções abaixo:
z+1
,
z2
e−z
,
z3
sin2 z
,
z5
cot z,
z2
(1 + z 2 )
2.
11. Desenhe os cortes de ramificação para as seguintes funções e determine a
diferença entre os valores quando se atravessa o corte:
¢1/2
¡ 2
,
z +1
¡ 2
¢1/3
z +1
,
µ
¶2
z−i
.
log
z+i
77
12. Seja f (z) analítica dentro e sobre o círculo |z − z0 | = R. Mostre que, para
um inteiro n ≥ 0,
¯
¯
n!
¯ (n)
¯
¯f (z0 )¯ ≤ n max |f (z)| .
R |z−z0 |=R
Com isto, prove o seguinte teorema (Teorema de Liouville): Se f (z) é
analítica, inclusive no ponto infinito, e
|f (z)| < ∞
para qualquer z, então f é uma constante.
13. Mostre que
Z
∞
0
cos
Z
∞
0
3
µ
¶
r
1 2
π
ax dx =
,
2
4 |a|
π3
(log x)2
dx
=
.
1 + x2
8
Transformação de Laplace
Como vimos no caso de transformação de Fourier, podemos expressar uma
função em termos de diferentes representações. A transformação de Laplace
é uma outra forma de representação de uma função, e é usada freqüentemente
para resolver a equação diferencial.
Definição: Seja f (x) uma função que não diverge para x → ∞ ou, pelo menos,
diverge mais lentamente que a função exponencial decresce. Definimos a
sua transformada de Laplace, F (s), por
Z ∞
F (s) =[f ] (s) ≡
f (x) e−sx dx.
(123)
0
Note que a transformação de Laplace é uma operação linear, isto é, para
quaisquer duas funções f (x) e g(x) que possuam transformada de Laplace,
temos
[αf +βg] (s) = α[f ] (s) + β[g] (s)
onde α e β são constantes.
A integral converge se f (x) não cresce mais rápido que o fator exponencial
decresce, e−sx . Por exemplo, para
f (x) = 1.
Como
Z
∞
e−sx dx =
0
78
1
,
s
(124)
então temos
1
.
s
Podemos tomar a derivada em relação a s dos dois lados da Eq.(124), de
modo que temos
Z ∞
1
d
e−sx dx = − 2 ,
(125)
ds 0
s
mas
Z ∞
Z ∞
∂ −sx
d
−sx
e dx =
e dx
ds 0
∂s
0
Z ∞
xe−sx dx
=−
[f =1]
(s) =
0
= −[f =x] (s)
(126)
Comparando as Eqs.(125) e (126), temos
[f =x]
(s) =
1
s2
(127)
Em geral, temos
[f =xn ]
3.1
(s) =
n!
.
sn+1
(128)
A Derivada da Transformada de Laplace
O método acima pode ser utilizado para obter a fórmula geral que relaciona a
derivada da transformada de Laplace à função original. Seja
Z ∞
F (s) =
f (x) e−sx dx.
0
Tomando as derivadas em s em ambos os lados da equação acima, temos
Z ∞
dF (s)
xf (x) e−sx dx.
=−
ds
0
Desta forma, vemos que a multiplicação de x por uma função f corresponde à
derivada em relação a s no espaço da transformada de Laplace F (s). Simbolicamente, podemos associar as operações,
x× f →−
d
× F (s) .
ds
(129)
Podemos obter Eq.(128) imediatamente como conseqüência da fórmula acima,
a partir da Eq.(124).
79
3.2
Transformada de Laplace da Derivada
Inversamente, vamos considerar a transformada de Laplace da derivada de uma
função f (x). Temos
Z ∞
df (x) −sx
e dx
df (s) =
[ dx ]
dx
0
Fazendo a integração por partes, obtém-se
Z ∞
Z ∞
¯∞
df (x) −sx
−sx ¯
f (x) e−sx dx
e dx = f (x) e ¯ + s
dx
0
0
0
= sF (s) − f (0)
(130)
Podemos expressar simbolicamente o resultado acima como
d
× f → s × F − f (0) .
dx
(131)
Isto é, a operação de derivada no espaço f (x) corresponde à multiplicação por
s no espaço F (s). Aplicando esta regra à derivada segunda, temos
d
d
×
× f (x) → s × [s × F (s) − f (0)] − f (1) (0) ,
dx dx
onde
f (1) (0) =
¯
df ¯¯
.
dx ¯x=0
Podemos generalizar esta operação como
n−1
X
dn
n
×
f
(x)
→
s
F
(s)
−
sn−r−1 f (r) (0) .
n
dx
r=0
(132)
Da propriedade acima, junto com a propriedade linear da transformação
de Laplace, temos a importante aplicação da Transformação de Laplace. Por
exemplo, vamos considerar uma equação diferencial como
a
df
d2 f
+b
+ cf = 0,
dx2
dx
(133)
com a condição inicial
f (0) = 1,
f
(1)
(0) = 0.
Vamos tomar a transformação de Laplace dos dois lados da Eq.(133). Usando
as regras que já vimos, tem-se
³
´
a s2 F (s) − f (1) (0) − sf (0) + b (sF (s) − f (0)) + cF (s) = 0,
80
ou
¡
³
´
¢
as2 + bs + c F (s) = a f (1) (0) + sf (0) + bf (0) .
Como a função f (x) é a função incógnita, sua transformada de Laplace F (s)
também é incógnita. Mas, no espaço da transformada de Laplace, a equação
para a incógnita F (s) se torna uma equação algébrica! Podemos, então, resolver
facilmente como
¢
¡
a f (1) (0) + sf (0) + bf (0)
F (s) =
.
as2 + bs + c
Se pudermos obter a transformada inversa de Laplace desta função, obteremos,
então a função f (x) desejada, ou seja, a equação diferencial é resolvida.
3.2.1
Transformação Inversa de Laplace
Como no caso da transformação de Fourier, a transformação de Laplace é uma
representação da mesma função no espaço F (s) no lugar do espaço f (x), e deve
possuir a transformação inversa. Para obtê-la, vamos começar com o teorema
da Transformada de Fourier,
µZ ∞
¶
Z ∞
1
iκx
0
−ikx0
0
g (x) =
e
g (x ) e
dx dk,
2π −∞
−∞
se g (x) é uma função contínua e possui uma transformada de Fourier. Na
fórmula acima, no lugar de g (x) , vamos utilizar a função
½ −sx
e f (x), x ≥ 0,
g (x) =
0,
x < 0.
Então
e
−sx
1
f (x) =
2π
Z
∞
iκx
e
−∞
ou seja
1
f (x) =
2π
Z
∞
µZ
∞
0
−(s+ik)x0
f (x ) e
0
0
dx
¶
dk,
e(s+ik)x F (s + ik) dk,
(134)
−∞
A equação acima mostra que a partir da continuação analítica da transformada de Laplace
Z ∞
0
F (z) =
f (x0 ) e−zx dx0
0
para o plano complex de s, tal que
z = s + ik,
podemos obter a função original, f (x) , como uma integral complexa,
Z
1
f (x) =
ezx F (z) dz,
2πi C
81
(135)
onde o contorno C é uma reta vertical de −i∞ a +i∞ no plano complexo
z, cruzando com o eixo real em z = s. Agora, vamos acrescentar apropriadamente algum caminho de tal forma que a integral acima fique sobre um contorno
fechado no plano complexo z, a fim de aplicarmos o teorema do resíduo. Escrevendo a Eq.(135) como
Z
1
f (x) =
ezx F (z) dk
2πi
Abaixo, mostramos vários exemplos da transformação.
82
Função f
f (x)
1
1
2
x
3
xn (n, um inteiro positivo
4
eax
5
sin ωx
6
cos ωx
7
xn g(x), for n = 1, 2, ...
8
x sin ωx
9
x cos ωx
10
g(ax)
11
eat g(x)
12
eax xn , for n = 1, 2, ...
13
xe−x
14
1 − e−x/T
15
eax sin ωx
16
eax cos ωx
17
u(x)
18
u(t − a)
19
20
21
22
23
24
u(t − a)g(t − a)
g 0 (t)
g 00 (t)
g (n) (t)
Rt
g(t)dt
0
R
g(t)dt
Transformada de Laplace
F (s) = {f (t)}
1
s>0
s
1
s>0
s2
n!
s>0
sn+1
1
s>a
s−a
ω
s>0
s2 + ω 2
s
s>0
s2 + ω 2
n
d G(s)
(−1)n
dsn
2ωs
s > |ω|
2
(s2 + ω 2 )
s2 − ω 2
s > |ω|
2
(s2³+ ´
ω2 )
s
1
G
Scale property
a
a
G(s − a) Shift property
n!
s>a
(s − a)n+1
1
s > −1
(s + 1)2
1
s > −1/T
s(1 + T s)
ω
s>a
(s − a)2 + ω 2
s−a
s>a
(s − a)2 + ω 2
1
s>0
s−as
e
s>0
s
−as
e G(s) Time-displacement theorem
sG(s) − g(0)
s2 · G(s) − s · g(0) − g 0 (0)
sn G(s) − sn−1 g(0) − sn−2 g 0 (0)... − g (n−1) (0)
G(s)
s
ª
G(s) 1 ©R
+
g(t)dt t=0
s
s
83
1
2
3
4
5
δ(t)
δ(t − a)
δ(t − a)g(t)
p
ω
p n e−ζωn t sin ωn 1 − ζ 2 t
1 − ζ2
p
e−ζωn t
1− p
sin(ωn 1 − ζ 2 t + θ),
1 − ζ2
where θ = cos−1 ζ
84
1
e−as
e−as g(a) Note: g(a) NOT G(a)
ωn2
(ζ < 1)
s2 + 2ζωn s + ωn2
s(s2
ωn2
(ζ < 1)
+ 2ζωn s + ωn2 )
4
Transformada de Fourier e Teoria de Distribuições
(Funções Generalizadas)
Vamos considerar a representação em série de Fourier de uma função f (x)
no intervalo [−L, L] . Se f (x) é uma função suave neste intervalo e integrável
quadraticamente,
Z L
|f (x)|2 dx < ∞.
(136)
Então, podemos escrever
−L
∞
π
1 X
cm eim L x ,
2L m=−∞
f (x) =
onde
cm =
Vamos denotar
Z
L
(137)
π
e−im L x f (x) dx.
−L
π
= ∆k,
L
e
km = m ∆k,
Z
F (km ) = cm =
L
e−ikm x f (x) dx.
−L
A Eq.(137) fica
∞
1 X
f (x) =
∆k F (km ) eikm x .
2π m=−∞
(138)
Considerando o limite em que L → ∞, a seqüência {km } pode ser considerada
uma variável k contínua e, portanto, o conjunto de coeficientes cm pode ser
considerado uma função da variável contínua k,
cm = F (km ) → F (k) .
Neste limite, a equação acima deve convergir para a integral,
Z ∞
1
f (x) =
dk F (k) eik x ,
2π −∞
onde
F (k) =
Z
∞
e−ik
−∞
x0
f (x0 ) dx0 .
(139)
(140)
A função F (k) é dita transformada de Fourier da função f (x) e, inversamente,
f (x) é a transformada inversa de Fourier da função F (k). Denotamos a transformada de Fourier como
Z ∞
0
F[f ] (k) =
e−ik x f (x0 ) dx0 = F (k) ,
−∞
85
e sua inversa como
−1
F[F
] (x) =
1
2π
Z
∞
dk F (k) eik
x
= f (x) .
−∞
Exercício: Obtenha a transformada de Fourier das seguintes funções:
2
f (x) = e−ax , a > 0.
1
.
f (x) = 2
x + x20
Exercício: Mostre que
Z
∞
f (x) eikx dx = 2
−∞
Z
∞
f (x) cos kx dx
0
quando f (x) é uma função par, e
Z
Z ∞
f (x) eikx dx = 2i
−∞
∞
f (x) sin kx dx
0
quando f (x) é uma função ímpar.
Exercício: Mostre que
Z ∞
x
π
sin kx dx = − e−|kb| ,
2 + b2
x
2
0
Z ∞
Γ (α)
απ
xα−1 sin kx dx =
, 0 < α < 1,
α sin
2
|k|
0
Z ∞
r
sin kx
π
√ dx =
,
2 |k|
x
0
Z ∞
π −|ab|
1
cos kx dx =
.
e
2 + b2
x
2
|b|
0
Vamos substituir a Eq.(140) na Eq.(139), tendo
¸
∙Z ∞
Z ∞
1
−ik x0
0
0
f (x) =
dk
e
f (x ) dx eik
2π −∞
−∞
x
(141)
Isto é o teorema de Integral de Fourier. Se pudéssemos trocar a ordem das
integrais, teríamos
¸
Z ∞∙
Z ∞
0
1
f (x) =
dk ei(x−x )k f (x0 ) dx0 .
(142)
−∞ 2π −∞
Na verdade, o objeto
1
2π
Z
∞
0
dk ei(x−x )k
−∞
86
não é bem definido no sentido usual da integral, pois, mesmo definindo a integral
como o limite
Z K
h
i
0
1
1
i(x−x0 )K
−i(x−x0 )K
dk ei(x−x )k =
−
e
e
lim
lim
2π K→∞ −K
2πi (x − x0 ) K→∞
1 sin (x − x0 ) K
= lim
K→∞ π
(x − x0 )
vemos que este limite não existe no sentido usual. No entanto, o lado direito da
Eq.(142) pode ser bem definido se escrevemos
#
Z ∞"
Z K
1
i(x−x0 )k
lim
f (x0 ) dx0 ,
dk e
(143)
K→∞ −∞ 2π −K
pois, antes de tomar o limite, a integral interna,
Z K
0
1
1 sin (x − x0 ) K
dk ei(x−x )k =
,
2π −K
π
(x − x0 )
é uma função bem definida. Na figura abaixo, mostramos o comportamento
desta função para K = 10 e K = 20.
sin( k x ) / x
20
k=20
10
k=10
0
-4
-2
0
2
4
Como pode ser visto, esta função tem um pico na origem com altura K e tem
oscilação com uma envolutória cuja amplitude é dada por
1
± .
x
Quanto maior K, maior é a freqüência da oscilação. Para K tendendo a infinito,
a função oscila com freqüência infinita mantendo a envoltória e com o pico da
87
origem tendendo ao infinito. Assim, como função de x, o limite K → ∞ não
existe ponto a ponto. Por outro lado, se calculamos a integral ANTES de tomar
o limite K → ∞, então, podemos provar que o limite (143) converge para f (x)
quando f (x) é contínua, como já vimos no teorema de Dirichlet para a série de
Fourier. Temos
#
Z ∞"
Z K
0
1
lim
dk ei(x−x )k f (x0 ) dx0 = f (x) ,
(144)
K→∞ −∞ 2π −K
que é a Eq.(141). O físico inglês P.M. Dirac introduziu a função δ através da
equação,
Z ∞
f (x) =
δ (x − x0 ) f (x0 ) dx0 ,
(145)
−∞
como se o limite feito antes da integral existisse:
"
#
Z K
0
1
lim
dk ei(x−x )k → δ (x − x0 ) .
K→∞ 2π −K
(146)
Mas como vimos, este limite não existe no sentido de função ponto a ponto em
x. Ainda mais, o objeto δ (x − x0 ) que satisfaz a Eq.(145) não existe como uma
função normal. Isto porque esta equação deve valer para qualquer função f (x)
arbitrária (desde que esta satisfaça a condição de suavidade e integrabilidade
quadrática). O lado esquerdo só depende do valor da função f (x) no ponto x,
então concluímos que
δ (x − x0 ) = 0.
(147)
para x 6= x0 , se δ (x − x0 ) é uma função normal (definida ponto a ponto). Isto
contradiz a Eq.(145) se δ (x) for uma função normal. Este problema causou
muita polêmica em torno da função δ de Dirac, mas foi matematicamente formalizado posteriormente por L. Schwartz que introduziu o conceito de distribuição.
A idéia básica é não considerar a Eq.(145) como uma integral normal, mas
como um simbolismo que representa todas as operações da Eq.(144). Neste caso,
a δ de Dirac é definida como um funcional linear no espaço de funções {f (x)} .
4.1
Funções Rapidamente Decrescentes
Antes de definir mais precisamente a distribuição, vamos introduzir o espaço formado de funções bastante restritas, as funções rapidamente decrescentes (r.d.).
Com estas poderemos, então, realizar todas as operações de derivadas, integrais e transformadas de Fourier, sem nos preocuparmos com os problemas de
convergência, etc.
Definição: Uma função f (x), definida em [−∞, +∞] é dita função rapidamente decrescente, quando satisfaz as seguintes propriedades:
1. f (x) é infinitamente derivável. Escrevemos este fato como
f (x) ∈ C (∞) .
88
2. Para números inteiros positivos arbitrários N e k, sempre
¯
¯
¯
N ¯
lim |x| ¯f (k) (x)¯ → 0.
|x|→∞
Um exemplo de função rapidamente descrescente é
2
f (x) = e−x .
Definimos também funções lentamente crescentes.
Definição: Uma função f (x), definida em [−∞, +∞] é dita função lentamente
crescente (l.c.), quando satisfaz as seguintes propriedades:
1.
f (x) ∈ C (∞) .
2. Para qualquer número inteiro positivo k, sempre existe um número
inteiro positivo N tal que
¯
¯
¯
¯
lim |x|−N ¯f (k) (x)¯ → 0.
|x|→∞
Exercício: Prove as seguintes afirmações.
1. Funções r.d. são funções l.c.
2. Polinôminos são funções l.c.
3. A derivada de uma função r.d. é função r.d.
4. Seja f (x) uma função r.d. . Então g (x) = f (αx + β) , α 6= 0 é uma
função r.d.
5. Sejam f1 (x) e f2 (x) funções r.d.’s. Então f1 (x) + f2 (x) e f1 (x) ×
f2 (x) são funçóes r.d.’s.
6. Seja f (x) uma função r.d. Então existe um número positivo M finito
tal que
Z
∞
−∞
|f (x)| dx < M.
Vamos considerar transformada de Fourier de uma função r.d. Podemos
provar a seguinte afirmação.
Teorema: Se f (x) é uma função r.d., então sua transformada de Fourier,
Z ∞
f (x) e−ikx dx
F (k) =
−∞
é função r.d. em relação a sua variável k.
89
Prova: Sabemos que, para funções r.d.’s,¯ a integral
da transformação de Fourier
¯
converge homogeneamente, já que ¯eikx ¯ = 1. Então, podemos calcular a
derivada como
Z ∞
dF
d
f (x) e−ikx dx
=
dk
dk −∞
Z ∞
∂ −ikx
=
f (x)
dx
e
∂k
−∞
Z ∞
= −i
xf (x) eikx dx.
−∞
Note que xf (x) é uma função r.d. e novamente a integral é homogeneamente convergente. Fazendo a integração por partes, temos
Z
¯∞
dF
1 ∞ d
1
= − xf (x) e−ikx ¯−∞ +
(xf (x)) e−ikx dx
dk
k
k −∞ dx
Z
1 ∞ d
=
(xf (x)) e−ikx dx.
k −∞ dx
Repetindo a integração por partes, podemos escrever
dF
N+1
= (−1)
dk
µ
1
ik
¶N +1 Z
∞
−∞
dN +1
(ixf (x)) e−ikx dx,
dxN+1
para qualquer número inteiro positivo N . Como
dN +1
(xf (x))
dxN+1
é uma função r.d., então a integral é finita, ou seja, existe M < ∞ tal que
¯Z ∞ N +1
¯
¯
¯
d
−ikx
¯
¯ < M.
(ixf
(x))
e
dx
¯
¯
N
+1
−∞ dx
Então, para qualquer número inteiro positivo N, temos
¯
¯
¯
µ¯ ¯¶N +1 ¯Z ∞ N+1
¯ N dF ¯
¯
¯ ¯
¯
d
−ikx
¯k
¯
¯
¯ = |k|N ¯ 1 ¯
(ixf
(x))
e
dx
¯
¯
¯
¯
¯
¯
N
+1
dk
k
−∞ dx
M
<
.
|k|
Assim,
Isto é,
¯
¯
¯ dF ¯
¯ < lim M → 0.
0 ≤ lim ¯¯k N
dk ¯ |k|→∞ |k|
|k|→∞
¯
¯
¯ N dF ¯
¯
¯ = 0.
lim k
dk ¯
|k|→∞ ¯
90
Analogamente, podemos provar que, para qualquer número inteiro positivo
m, temos
¯
¯
¯ N dm F ¯
¯
¯ → 0,
lim k
dk m ¯
|k|→∞ ¯
para inteiro positivo N arbitrário. Ou seja, a função F (k) é função r.d.
Exercício: Seja f (x) uma função r.d. e F (k) sua transformada de Fourier, ou
seja,
F (k) = F[f (x)] (k) .
Mostre que
F[ df (x)] (k) = ikF (k) ,
dx
µ ¶
1 ibk/a
k
F[f (ax+b)] (k) =
F
e
, a 6= 0.
|a|
a
Exercício: Sejam f (x) e g(x) funções r.d.’s e F (k) e G (k) suas respectivas
transformadas de Fourier. Mostre que
Z ∞
Z ∞
1
F ∗ (k) G (k) dk =
f ∗ (x) g (x) dx.
2π −∞
−∞
4.1.1
Definição de Distribuições, suas derivadas
Condição: Para todas as funções r.d.’s, ϕ (x) , existe o limite finito,
Z ∞
lim
fn (x) ϕ (x) dx.
n→∞
−∞
Este valor do limite define um funcional linear no conjunto de funções r.d.’s,
ϕ (x) . Escrevemos como
Z ∞
lim
fn (x) ϕ (x) dx ≡ f ∗ φ
n→∞
−∞
ou simbolicamente
lim
n→∞
Z
∞
−∞
fn (x) ϕ (x) dx ≡
Z
∞
f (x) ϕ (x) dx.
−∞
Quando a seqüência de funções r.d.’s, {fn (x) , n = 1, ..., } satisfaz a condição
acima, dizemos que a seqüência de funções r.d.’s, {fn (x) , n = 1, ..., } define
uma distribuição (função generalizada) f (x) , que expressamos como
{fn (x) , n = 1, ..., } ≈ f (x).
A função r.d. ϕ (x) é chamada função de teste. Nesta definição, note que a
distribuição f (x) não está definida ponto a ponto, temos em vez disso que, para
91
cada função teste ϕ (x) , fica definido um valor, o qual, escrevemos simbolicamente na forma de integral
Z ∞
f (x) ϕ (x) dx.
−∞
Assim, funções generalizadas são funcionais lineares 10 definidos no espaço de
funções r.d..
Definição: A função δ de Dirac é a distribuição (função generalizada) que
satisfaz a seguinte equação:
Z ∞
δ (x) ϕ (x) dx = ϕ (0) .
−∞
Segundo a definição da δ de Dirac acima, qualquer seqüência de funções que
satisfaz esta propriedade converge para a δ de Dirac. Como vimos, a seqüência
das funções
1 sin (nx)
fn (x) =
π
x
define a função generalizada, δ de Dirac:
lim
n→∞
1 sin nx
≈ δ (x) .
π x
Mas, em geral, a seqüência que define uma distribuição (função generalizada)
não é únivoca. Por exemplo, se definimos a seqüência de funções
fn (x) =
³ n ´1/2
π
2
e−nx ,
então para qualquer função teste ϕ (x) , podemos mostrar que
Z ∞
fn (x) ϕ (x) dx = ϕ (0) .
lim
n→∞
−∞
Isto é,
lim
n→∞
³ n ´1/2
π
2
e−nx ≈ δ (x) .
Exercício: Mostre que para qualquer função teste ϕ (x) ,
Z ∞ ³ ´1/2
2
n
lim
e−nx ϕ (x) dx = ϕ (0) .
n→∞ −∞ π
1 0 Um funcional é um mapeamento do espaço de funções no corpo escalar, ou seja, a associação de um número a uma função. Por exemplo, a integral definida de uma função é um
funcional.
92
Exercício: Mostre que
1
Γ
≈ δ(x),
π x2 + Γ2
1
1
lim
≈ δ(x).
σ→0 σπ cosh (x/σ)
lim
Γ→0
Exercício: Para uma função generalizada f (x) , se
Z ∞
f (x) ϕ (x) dx = 0
−∞
para qualquer função teste ϕ (x) ímpar, então f (x) é dita função generalizada par. Se esta igualdade valer para qualquer função teste ϕ (x) par,
então f (x) é dita função generalizada ímpar. Podemos escrever
f (−x) = f (x) , par,
f (−x) = −f (x) , ı́mpar.
Mostre que a função δ de Dirac é uma função generalizada par. Mostre
também que a derivada da δ é uma função generalizada ímpar.
Definição: Para uma dada seqüência de funções que converge para uma função
generalizada f (x) ,
{fn (x) , n = 1, ..., } ≈ f (x),
a seqüência formada de derivadas também define uma função generalizada
que chamamos de derivada da função generalizada f (x) e escrevemos como
df
0
dx , ou f (x) :
½
¾
dfn (x)
df (x)
, n = 1, ...,
≈
.
dx
dx
Usando a definição acima, podemos provar que, para qualquer função teste
ϕ (x) ,
Z ∞
Z ∞
dϕ (x)
df (x)
f (x)
ϕ (x) dx = −
dx.
dx
dx
−∞
−∞
Exercício: Mostre a relação acima.
Exercício: Mostre que qualquer função generalizada é infinitamente derivável
e que sua m−ésima derivada é dada por
Z ∞ m
Z ∞
dm ϕ (x)
d f (x)
m
ϕ
(x)
dx
=
(−1)
f
(x)
dx.
dxm
dxm
−∞
−∞
Exercício: Mostre que
dθ (x)
= δ (x) .
dx
93
Como vimos, funções generalizadas (distribuições) são definidas como funcionais lineares no espaço de funções teste. Para uma dada função f (x) r.d., ou
l.c., sempre existe uma seqüência de funções {fn (x) , n = 1, ..., } r.d. que tem
a propriedade
Z ∞
Z ∞
lim
fn (x) ϕ (x) dx =
f (x) ϕ (x) dx,
n→∞
−∞
−∞
onde o lado direito é a integral no sentido usual. Assim, qualquer função r.d., ou
l.c., pode ser considerada como função generalizada. Por outro lado, operações
entre duas ou mais funções generalizadas devem que ser definidas com cuidado.
Exercício: Mostre que a função constante I (x) = 1, com −∞ < x < ∞, é uma
função generalizada.
Exercício: Mostre que
dI
= 0,
dx
no sentido de função generalizada.
A função generalizada I (x) pode ser escrita como 1, sem criar problemas:
I (x) = 1.
Exercício: Seja f (x) uma distribuição e h (x) uma função l.c. Defina apropriadamente o produto h (x) f (x) como uma distribuição. Mostre que, neste
caso, vale a regra da cadeia para a derivada,
d
dh (x)
df (x)
[h (x) f (x)] =
f (x) + h (x)
,
dx
dx
dx
(148)
no sentido de função generalizada.
Exercício: Sejam f (x) e g (x) duas distribuiçóes. Defina apropriadamente a
soma,
f (x) + g (x)
no sentido de distribuição. Mostre que, neste caso,
d
df (x) dg (x)
[f (x) + g (x)] =
+
,
dx
dx
dx
no sentido de função generalizada.
Exercício: Mostre que o produto de duas distribuições não é necessariamente
bem definido.
Exercício: Seja h (x) uma função l.c.. Mostre que
h (x) δ (x) = h (0) δ (x) .
94
(149)
Exercício: Seja h (x) uma função l.c.. Então,
d
dh (x)
dδ (x)
[h (x) δ (x)] =
δ (x) + h (x)
dx
dx
dx
dh (0)
dδ (x)
=
δ (x) + h (x)
.
dx
dx
(150)
Por outro lado,
d
d
[h (x) δ (x)] =
[h (0) δ (x)]
dx
dx
dδ (x)
.
= h (0)
dx
(151)
As Eqs.(150) e (151) são consistentes?
Exercício: Mostre que
lim
ε→0+
1
=P
x ± iε
onde
µ ¶
1
∓ iπδ (x) ,
x
(152)
µ ¶
1
x
P
é a distribuição chamada de valor principal de 1/x, definida como
∙Z −ε
¸
µ ¶
Z ∞
1
1
1
∗ ϕ = lim
ϕ (x) dx +
ϕ (x) dx .
P
ε→0
x
x
−∞ x
ε
Exercício: Mostre que
δ (αx) =
1
δ (x) .
|a|
(Preste atenção no sinal de a).
Exercício: Seja f (x) uma função em x que tem zeros {xi , i = 1, ..n} no eixo
real. Mostre que
δ (f (x)) =
n
X
i=1
Exercício: Mostre que
¡
¢
δ x2 − a2 =
1
¯ ¯
¯ df ¯
¯ dx ¯
δ (x − xi ) .
x=xi
1
[δ (x − a) + δ (x − a)] .
2 |a|
Exercício: Seja x uma variável que tem dimensão de distância. Qual é a dimensão de δ (x)?
95
Exercício: Seja g (x) uma distribuição. Se
xg (x) = 0,
então mostre que g (x) é poroporcional a função δ de Dirac,
g(x) = Const. × δ (x) .
Exercício: Seja g (x) uma distribuição. Se
xg (x) = 1,
então mostre que
µ ¶
1
+ Const × δ (x) ,
x
(153)
1
+ C × δ (x) .
ε→0 x ± iε
(154)
g (x) = P
ou ainda que
g (x) = lim
Exercício: Para vetores coordenada, r e r0, tridimensionais, definimos a função
δ de Dirac tridimensional δ (3) (r − r0 ) como
δ (3) (r − r0 ) = δ (x − x0 ) δ (y − y 0 ) δ (z − z 0 )
em coordenadas Cartesianas. Mostre que em coordenadas esféricas (r, θ, φ),
podemos escrever
δ (3) (r − r0 ) =
1
δ (r − r0 ) δ (cos θ − cos θ0 ) δ (φ − φ0 ) .
rr0
Exercício: Mostre que
∇2
µ ¶
1
= −4πδ (3) (r) ,
r
onde
∇2 =
∂2
∂2
∂2
+
+
∂x2 ∂y 2 ∂z 2
é o operador Laplaciano.
A função δ de Dirac sempre aparece quando derivamos uma função descontínua. Por exemplo, seja f uma função formada de duas partes,
½
f1 (t),
t<a
f (t) =
f2 (t),
t>a
Neste caso, podemos escrever
f (t) = f1 (t) θ (a − t) + f2 (t) θ (t − a) .
96
Assim,
df2
df
df1
=
θ (a − t) − f1 (t) δ (t − a) +
θ (t − a) + f2 (t) δ (t − a)
dt
dt
dt
df1
df2
=
θ (a − t) +
θ (t − a) + [f2 (a) − f1 (a)] δ (t − a)
dt
dt
df2
df1
θ (a − t) +
θ (t − a) + ∆ft=a δ (t − a)
=
dt
dt
onde ∆ft=a é a descontinuidade da função na posição t = a.
Exercício: Calcule a derivada das seguintes funções:
½
sin x,
x<0
f (x) =
,
cos x,
x>0
f (x) = e−|x| ,
f (x) = sign (x) .11
4.2
Método de Função de Green
A função δ de Dirac tem uma aplicação importante. Seja D o operador diferencial linear dado por
D=
d
d2
+ P (t) + Q(t).
2
dt
dt
A função de Green G(t, t0 ) deste operador é definida como a solução da equação,
D [G(t, t0 )] = δ(t − t0 ).
(155)
Uma vez obtida G (t, t0 ) podemos calcular a solução particular da equação não
homogênea,
D [z(t)] = f (t),
(156)
por
z (t) =
Z
∞
dt0 G (t, t0 ) f (t0 ) .
(157)
−∞
A prova é quase imediata. É só verificarmos que esta expressão satisfaz a
Eq.(156). Aplicando o operador diferencial,
∙Z ∞
¸
D [z (t)] = D
dt0 G (t, t0 ) f (t0 ) .
(158)
−∞
11
sign(x) =
½
1,
−1,
97
x>0
x<0
As derivadas do operador diferencial se referem à variável t e não à t0 e, portanto,
só derivaremos a função G(t, t0 ), que depende de t. Assim, temos
Z ∞
D [z (t)] =
dt0 D [G (t, t0 )] f (t0 ) .
(159)
−∞
Mas por definição da função de Green G,
D [G(t, t0 )] = δ(t − t0 ),
então temos
D [z (t)] =
Z
∞
−∞
dt0 δ(t − t0 ) f (t0 )
= f (t).
(160)
Isto é, verificamos que a Eq.(157) satisfaz a Eq.(156).
Adicionando a solução geral da parte homogênea da equação, a solução geral
da equação homogênea é formalmente dada por12
Z ∞
z(t) =
dt0 G (t, t0 ) f (t0 ) + αz1 (t) + βz2 (t) ,
(161)
−∞
onde z1 e z2 são as soluções linearmente independentes da parte homogênea da
equação,
D [z1,2 ] = 0.
4.3
Construção da Função de Green
Podemos obter a função de Green G (t, t0 ) de uma equação diferencial a partir
das soluções da parte homogênea da equação. Da definição da função de Green,
D [G (t, t0 )] = δ (t − t0 ) ,
(162)
D [G (t, t0 )] = 0, t 6= t0 ,
(163)
temos
devido à propriedade da função δ de Dirac. Isto significa que, quando t 6= t0 ,
a função de Green G (t, t0 ) é uma solução da parte homogênea da equação em
relação a t. Por outro lado, a Eq.(162) sugere alguma descontinuidade da função
1 2 Aqui, restringimos a discussão ao caso da equação diferencial de 2 o ordem, mas o argumento vale para qualquer ordem. No caso de uma equação diferencial linear de ordem n,
teremos n−soluções linearmente independentes da parte homogênea da equação e, portanto,
a solução geral tem a forma,
Z ∞
n
X
(i)
z(t) =
dt0 G(t, t0 )f (t0 ) +
αi zhom (t),
−∞
i=1
o
(i)
onde zhom (t) , i = 1, ...n é o conjunto de n soluções linearmente independentes da parte
homogênea da equação.
n
98
em t = t0 . Assim, vamos separar em duas regiões, t > t0 e t < t0 . Escrevemos,
então,
½
C1 z1 (t) ,
t < t0
0
G (t, t ) =
(164)
C2 z2 (t) ,
t > t0
onde z1 (t) e z2 (t) são duas soluções linearmente independentes da parte homogênea da equação. A expressão acima pode ser re-escrita como
G (t, t0 ) = C1 z1 (t) θ (t0 − t) + C2 z2 (t) θ (t − t0 ) ,
(165)
onde θ é a função degrau de Heaviside.
Vamos calcular o resultado do operador diferencial D [ ] aplicado a esta expressão. Utilizando a expressão da derivada da função degrau de Heaviside,
temos
d
dz1 (t)
dz2 (t)
G (t, t0 ) = C1
θ (t0 − t)+C2
θ (t − t0 )+{C2 z2 (t) − C1 z1 (t)}t=t0 δ (t − t0 ) ,
dt
dt
dt
d2
G (t, t0 ) =
dt2
½
¾
d2 z1 (t)
d2 z2 (t)
dz2 (t)
dz1 (t)
0
0
θ (t − t) + C2
θ (t − t ) + C2
δ (t − t0 )
C1
− C1
dt2
dt2
dt
dt
t=t0
dδ (t − t0 )
+ {C2 z2 (t0 ) − C1 z1 (t0 )}t=t0
,
dt
e, portanto, para D = d2 /dt2 + P (t)d/dt + Q(t), temos
D [G (t, t0 )] = C1 D [z1 (t)] θ (t0 − t) + C2 D [z2 (t)] θ (t − t0 )
½
¾
dz2 (t)
dz1 (t)
+ C2
δ (t − t0 )
− C1
dt
dt
0
t=t
dδ (t − t0 )
0
0
+ {C2 z2 (t ) − C1 z1 (t )}t=t0
dt
+ P (t0 ) {C2 z2 (t) − C1 z1 (t)}t=t0 δ (t − t0 )
(166)
O lado direito da primeira linha se anula, pois z1 (t) e z2 (t) são soluções da
equação
D [z1,2 ] = 0.
Queremos escolher C1 e C2 de tal forma que a Eq.(166) seja igual a δ(t − t0 ).
Assim, a terceira linha da Eq.(166) deve sumir. Ou seja, devemos escolher
C2 z2 (t0 ) − C1 z1 (t0 ) = 0.
(167)
Note que esta condição elimina também a última linha da Eq.(166). Agora
basta escolher,
dz2 (t0 )
dz1 (t0 )
C2
− C1
= 1.
(168)
0
dt
dt0
99
A solução do sistema {Eq.(167),Eq.(168)} fornece
z2 (t0 )
,
W [z1 (t0 ) , z2 (t0 )]
z1 (t0 )
C2 =
,
W [z1 (t0 ) , z2 (t0 )]
C1 =
(169)
(170)
onde W no denominador é uma quantidade conhecida por Wronskiana, definida
por13
dz2 (t)
dz1 (t)
W [z1 (t) , z2 (t)] = z1 (t)
− z2 (t)
dt
dt
¯
¯ z1 (t)
z
(t)
2
= det ¯¯
dz1 (t) /dt dz2 (t) /dt
¯
¯
¯.
¯
(171)
Finalmente, obtivemos a expressão da função de Green para a equação diferencial linear de segunda ordem por
½
1
t < t0
z2 (t0 ) z1 (t) ,
0
G (t, t ) =
,
(172)
0
z1 (t ) z2 (t) ,
t0 < t
W [z1 (t0 ) , z2 (t0 )]
onde, como foi dito, z1 e z2 são quaisquer duas soluções linearmente independentes da equação homogênea.
Exercício: Prove que a Wronskiana de duas funções linearmente dependentes
é nula. Prove também que, se a Wronskiana é identicamente nula, então
as duas funções são linearmente dependentes.
Note que a função de Green não é unívoca. Em primeiro lugar, quaisquer
duas funções z (1) e z (2) podem ser utilizadas desde que elas sejam soluções
linearmente independentes da equação homogênea. Isto é equivalente a dizer
que, se G0 (t, t0 ) é uma função de Green da equação, então,
G (t, t0 ) = G0 (t, t0 ) + zhom (t)
é uma outra função de Green, também. Em particular, podemos escolher
zhom (t) = −
1 3 Em
z2 (t0 )
z1 (t)
W [z1 (t0 ) , z2 (t0 )]
geral, a Wronskiana de duas funções f e g é definida por
W [f, g] = f g 0 − gf 0 .
Genericamente, a Wronskiana de n funções é definida por
¯⎛
¯
f2
f1
¯
¯⎜ f 0
f20
¯⎜ 1
¯
⎜
W [f1 , f2 , ..., fn ] = det ¯⎜ ..
¯⎝ .
¯
(n−1)
(n−1)
¯
f1
f2
100
···
···
···
fn
fn0
..
.
(n−1)
fn
⎞¯
¯
¯
⎟¯
⎟¯
⎟¯ .
⎟¯
⎠¯
¯
¯
na Eq.(172). Com esta escolha, a função de Green fica
½
0
0
G (t, t ) =
1
0
[z
(t
)
z2 (t) − z2 (t0 ) z1 (t)] ,
0
0
1
W [z1 (t ),z2 (t )]
t < t0
,
t0 < t
e a solução particular Eq.(157) se torna
Z t
z(t) =
G(t, t0 )f (t0 )dt0 .
(173)
(174)
−∞
Exercício: Obtenha a função de Green da equação
¸
∙ 2
d
2 d
l (l + 1)
G(r, r0 ) = δ(r − r0 ).
+
−
dr2
r dr
r2
onde l > 0.
4.4
Sistema das Equações Lineares Acopladas
A Eq.(156) pode ser vista como um sistema de equações diferenciais de 1a ordem, introduzindoumavarivelau
dz
dt .Consideremos v como uma nova função incógnita. Isto é, em vez de considerar uma equação de segunda ordem para uma variável z, consideremos a
equação de primeira ordem com duas variáveis incógnitas z e v. Para explicitar
este aspecto, escrevamos
z1 = z,
z2 = v,
de modo que podemos re-escrever a Eq.(156) como
dz1
= z2
dt
dz2
= −P (t) z2 − Q (T ) z1 + f (t) .
dt
Ainda podemos escrever na forma matricial,
¶
µ
¶ µ
¶
µ
d
z1
f1
z1
= A (t)
+
,
z2
z2
f2
dt
onde
e
µ
0
1
A (t) =
−Q (t) −P (t)
µ
¶ µ
¶
f1
0
=
,
f (t)
f2
(175)
(176)
¶
no caso da Eq.(175). Mas a Eq.(176) é a forma mais geral da equação diferencial
de primeira ordem, quando A e f têm a forma mais geral,
µ
¶
A11 (t) A12 (t)
A=
A21 (t) A22 (t)
101
e
f=
µ
f1 (t)
f2 (t)
¶
.
Podemos considerar uma equação diferencial linear de primeira ordem mais geral
como
d
z = Az + f ,
(177)
dt
em que a dimensão do vetor z pode ser extendida para qualquer número N
inteiro arbitrário. Naturalmente, neste caso, a matrix A deve ser a matriz
N × N e o vetor f tem que ser de N componentes.
O método de função de Green também pode ser utilizado para ter a solução
particular da equação não homogênea a partir da solução homogênea,
µ
¶
d
(178)
− A z (h) (t) = 0.
dt
b (matriz) cujos elementos de matriz
Para isto, definimos a função de Green G
são funçóes generalizadas que satisfazem a seguinte equação,
µ
¶
d
b (t, t0 ) = b
1δ (t − t0 ) ,
(179)
−A G
dt
onde b
1 é a matriz identidade. Com esta função de Green, uma solução particular
do sistema (177) pode ser obtida por
Z ∞
b (t, t0 ) f (t0 ) dt0 .
(180)
G
z (t) =
−∞
Exercício: Mostre que vecz(t) da Eq.(180) é uma solução da Eq.(177).
Exercício: Consideremos o caso homogêneo, Eq.(178).
1. Quando A é uma matriz constante, mostre que a solução da Eq.(??
é dada formalmente por14
z (h) (t) = eA
1 4 Obviamente,
t
z (h) (0) ,
a seguinte ”dedução” é errada,
dz
dt
dz
z
Z
dz
z
ln z
= Az,
= Adt,
Z
=
Adt
= At + C
z = CeAt
pois viola completamente as regras de operações vetoriais.
102
(181)
onde
∞
X
1 n
e =
Z
n!
n=0
Z
e
z (h) (0)
é o vetor que corresponde à condição inicial.
2. Se A depende de t, é possivel escrever
?
z (h) (t) = e
Rt
0
A dt
z (h) (0)?
3. Considere um sistema de oscilador harmônico unidimensional,
m
d2 x
= −kx.
dx2
Converta para a forma de equações de primeira ordem acopladas e
escreva a solução formal Eq.(181). Calcule a exponencial e obtenha
a solução x = x (t) explicitamente.
Exercício: No problema anterior (A const.), mostre que
b (t, t0 ) = eA (t−t0 ) θ (t − t0 )
U
(182)
é uma função de Green (matriz) satisfazendo
µ
¶
d
b (t, t0 ) = b
1δ (t − t0 ) .
−A U
dt
No exercício acima, a solução geral da Eq.(177) é dada por
z (t) = z (h) (t) +
Z
t
−∞
b (t, t0 ) f (t0 ) dt0 .
U
(183)
Por outro lado, da Eq.(181), a ação da matriz eA t atuando em um vetor z (h) (0)
gera a solução da equação homogênea no tempo t. Podemos expressar este fato
como sendo o operador eA t transformando o vetor z (h) (0) avaliado no tempo
t = 0 em um vetor em outro tempo t. Ou seja, o operador eA t "propaga" o vetor
inicial até o tempo t de acordo com a equação diferencial homogênea. Desta
forma, a parte integral da Eq.(183) pode ser interpretada como a superposição
de soluções criadas nos tempos t0 < t como f (t0 ) que se propagaram até o tempo
t de acordo com a dinâmica descrita pela equação diferencial homogênea.
O fenômeno de propagação de onda tem exatamente este aspecto, A interpretação de superposição acima mencionada corresponde ao Princípio de Huygens,
onde a onda final é obtida como a superposição das ondas criadas pela força
externa no passado.
103
Exercício: Na Mecânica Quântica, a dinâmica de spin (momento angular) de
um elétron submetido a um campo magnético constante B é descrita em
termos de uma função de onda formada por duas funções complexas,
¶
µ
ψ↑ (t)
ψ=
ψ↓ (t)
obedecendo a seguinte equação :
i~
∂ψ
e~
∂ψ
=−
σ·B
,
∂t
2mc
∂t
(184)
onde e e m são a carga e a massa do elétron, ~ é a constante de Planck
(dividida por 2π), e σ é o vetor formado de matrizes de Pauli, ou seja
⎞
⎛
σx
σ = ⎝ σy ⎠ ,
σz
com
σx =
µ
0 1
1 0
¶
, σx =
µ
¶
0 −i
i 0
, σx =
µ
1 0
0 −1
¶
.
1. Mostre que a equação de movimento para ψ, Eq.(184) conserva o
valor do módulo quadrado de ψ, ou seja
|ψ (t)|2 = |ψ↑ (t)|2 + |ψ↓ (t)|2 = Const.
2
2
Isto é, se, no tempo t = 0, |ψ↑ (0)| + |ψ↓ (0)| = 1, então sempre
teremos |ψ↑ (t)|2 + |ψ↓ (t)|2 = 1. Escolher o módulo quadrado da
função de onda ψ como um é dito normalizar a função de onda.
2. Quando a função de onda é normalizada, P↑ = |ψ↑ (t)|2 e P↓ =
2
|ψ↓ (t)| representam a probabilidade de encontrar o elétron com seu
spin na direção de z e na direção de −z, respectivamente. Inicialmente o spin estava na direção de z. Foi aplicado, no instante t = 0,
o campo magnético B constante na direção de x. Calcule a variação
temporal da probabildade de encontrar o elétron com spin na direção
oposta a z.
3. Se, em vez de um campo magnético na direção de x, for aplicado um
na direção de z, calcule a probabildade de encontrar o elétron com
spin na direção de z.
4.5
Transformada de Fourier de distribuições
Consideramos uma seqüência de funções r.d.’s, {fn (x) , n = 1, ..., } que define
uma distribuição (função generalizada) f (x):
{fn (x) , n = 1, ..., } ≈ f (x).
104
Para cada função fn (x) , sua transformada de Fourier
Fn (k) = F[fn (x)] (k)
é uma função r.d. como mostrado anteriormente. A sequência
{Fn (k) , n = 1, ..., }
define uma distribuição
{Fn (k) , n = 1, ..., } ≈ F (k).
A distribuição F (k) é dita a transformada de Fourier da distribuição f (x) e
escrevemos formalmente
Z ∞
f (x)e−ikx dk = F (k).
−∞
A atuação de F (k) no espaço de função teste Φ (k) fica dada por
Z ∞
Z ∞
1
F (k)Φ (k) dk =
f (x)ϕ (x) dx,
2π −∞
−∞
onde
Φ (k) = F[ϕ(x)] (k) ,
−1
ϕ (x) = F[Φ(k)]
(x).
Exercício: Obtenha a transformada de Fourier das seguintes funlções generalizadas.
δ (x) ,
I (x) (= 1)
θ (x)
No problema acima, a transformada de Fourier de I (x) pode ser obtida a
partir do teorema de integral de Fourier,
Z ∞
Z ∞
0
1
ϕ (x) =
dkeikx
d−ikx ϕ (x0 ) dx0 ,
2π −∞
−∞
mas podemos mostrar o mesmo resultado na forma heuristico como segue.
Na integral
Z ∞
e−ikx dx.
−∞
considerando os comportamentos do integrando para |x| → ∞, redefinimos a
integral para garantir a convergência como
Z ∞
Z ∞
Z 0
e−ikx dx → lim
e−i(k−iη)x dx + lim
e−i(k+iη)x dx
−∞
η→+0
η→+0
0
105
−∞
Então
Z
lim
η→+0
∞
−i(k−iη)x
e
0
¯∞
e−i(k−iη)x ¯¯
dx = lim
η→+0 −i (k − iη) ¯
0
1
= lim
η→+0 i (k − iη)
µ ¶
1
= −iP
+ πδ (x) ,
x
e analogamente
lim
η→+0
Z
0
e
−i(k+iη)x
dx = lim
−∞
η→+0
Z
∞
e+i(k+iη)x dx
0
1
−i (k + iη)
µ ¶
1
= +iP
+ πδ (x) .
x
= lim
η→+0
Assim, temos
Z
∞
e−ikx dx = 2πδ (k) .
(185)
−∞
O método acima é chamado o método de fator de convergência.
Exercício: Para uma função de teste ϕ (x) consideramos a função
f (x) =
∞
X
ϕ (x + 2nπ) .
n=−∞
Usando a expansão em série de Fourier desta função e considerando x = 0,
mostre que
lim
K→∞
K
X
n=−K
Z ∞
K
1 X
ϕ (2nπ) = lim
ϕ (t) e−int dt.
K→∞ 2π
−∞
n=−K
Com isto, mostre que
lim
K→∞
K
X
n=−K
einx = lim 2π
K→∞
K
X
n=−K
δ (x − 2πn) .
Podemos utilizar a transformada de Fourier para obter a função de Green
b é constante. Neste caso,
da Eq.(179). Consideramos o caso em que a matriz A
sabemos que a função de Green depende somente a diferença das duas variãveis,
b (t, t0 ) = G
b (t) ,
G
106
onde
τ = t − t0 ,
temos
Fb (ω) =
Z
∞
−∞
e sua transformada inversa,
b (τ ) = 1
G
2π
Z
b (τ ) e−iωτ dτ,
G
∞
−∞
Fb (ω) eiωτ dω.
(186)
Substituindo a expressão acima na Eq.(179), e usando a fórmula,
Z ∞
1
δ (τ ) =
eiωτ dω
2π −∞
temos
Temos que ter
1
2π
Z
Z ∞
³
´
1
iωτ
b
b
eiωt dω.
iω − A F (ω) e dω =
2π −∞
−∞
∞
³
´
b Fb (ω) = −i.
ω + iA
b são matrizes. Mas sempre possível escolher uma
Lembre aqui ambos Fb e A
b
b
base onde F e A se tornam matrizes diagonais (veja o exemplo a seguir). Neste
caso, como todas as operações algebricas ficam comutativas, podemos tratar-los
como números normais. Considerando que Fb (ω) é uma distribuição, podemos
escrever a solução (ver Eq.(154) como
³
´
−i
b .
+ Const.δ ω + iA
b ± iε
ε→0 ω + iA
Fb (ω) = lim
Substituindo na Eq.(186), temos
Z ∞
b (τ ) = 1
G
Fb (ω) eiωτ dω
2π −∞
Z ∞∙
³
´¸
1
1
b
=
+ Const.δ ω + iA eiωτ dω.
b ± iε
2πi −∞ ω + iA
Acima, introduzimos um objeto
³ ´
b
δ X
b uma matriz. Mas isto pode ser entendida como
sendo X
Z ∞
³ ´
b
b = 1
eikX dk.
δ X
2π −∞
107
(187)
No caso acima, temos por exemplo,
Z ∞ ³
´
b
b eiωτ dω = eAt
δ ω + iA
−∞
e portanto, a parte δ produz a parte da solução homogênea da função de Green.
O termo
1
³
´
b ± iε
ω + iA
deve ser entendido como a inversão da matriz,
h³
´
i−1
b ± iε
ω + iA
.
Assim, a Eq.(187) tem a forma
Z ∞ h³
´
i−1
1
b
b
b ± iε
G (τ ) =
eiωτ dω + Const × eAt .
ω + iA
2πi −∞
(188)
Para fixar a ídeia, vamos considerar um exemplo simples de caso de oscilador harmonico unidimensional com a força externa dependendo do temp,
f (t). Temos
d2 x
m 2 = −kx + f (t) .
(189)
dt
Introduzindo a notação vetorial,
µ
¶
x (t)
x=
,
v (t)
com
dx
,
dt
a equação de movimento Eq.(189) é equivalente a
µ
¶
µ
¶ µ
¶
d
x (t)
b x (t) + f (t) /m ,
=A
v (t)
v (t)
0
dt
v (t) =
onde
b=
A
µ
0 −k/m
1
0
¶
.
Esta matriz tem autovalores determinados pela equação,
¯
¯
¯b
¯
det ¯A
− λIb¯ = 0,
λ2 +
k
= 0,
m
λ = ±iω0 ,
108
(190)
p
onde definimos ω0 ≡ k/m. Calculando autovetores, podemos verificar que
µ
¶
¶µ
¶ µ
¶µ
0 −ω02
0
iω0 −iω0
iω0 −iω0
iω0
,
=
0 −iω0
1
0
1
1
1
1
ou seja
µ
iω0
1
−iω0
1
¶−1
Chamamos
b
A
µ
S=
iω0
1
µ
iω0
1
então
S
−1
bS=
A
µ
¶
−iω0
1
−iω0
1
iω0
0
µ
=
¶
0
−iω0
iω0
0
0
−iω0
¶
.
,
¶
.
Agora re-escrevemos a Eq.(190) como
µ
¶ µ
¶
µ
¶
d
x (t)
f (t) /m
x (t)
−1
b
+
= ASS
v (t)
0
v (t)
dt
Multiplicando S −1 nos dois lados, temos
µ
¶
µ
¶
µ
¶
d
x (t)
f (t) /m
x (t)
−1
b
+S
.
S
= S AS S
v (t)
0
v (t)
dt
Denominamos
z=
f=
µ
µ
z1 (t)
z2 (t)
f1 (t)
f2 (t)
a equação acima fica
µ
¶ µ
d
z1 (t)
iω0
=
z2 (t)
0
dt
¶
¶
=S
=S
0
−iω0
µ
µ
x (t)
v (t)
¶
,
f (t) /m
0
¶µ
z1 (t)
z2 (t)
¶
¶
,
+
µ
f1 (t)
f2 (t)
¶
.
A função de Green atua sempre como
µ
¶
µ
¶
Z
Z
b (τ ) S S −1 f (t) /m dτ
b (τ ) f (t) /m dτ = S S −1 G
G
0
0
então vamos calcular
b (τ ) S.
S −1 G
109
Considerando a parte não homogênea da Eq.(188), e escolhendo o sinal − do
fator ±iε, por exemplo, temos
Z ∞
h³
´
i−1
1
b − iε
S −1 ω + iA
Seiωτ dω
2πi −∞
Z ∞ h³
´
i−1
1
b − iε
=
eiωτ dω
ω + iS −1 AS
2πi −∞
¶−1
Z ∞µ
1
ω − ω0 − iε
0
=
eiωτ dω
0
ω + ω0 − iε
2πi −∞
¶
Z ∞µ
1
1/(ω − ω0 − iε)
0
=
eiωτ dω
0
1/(ω + ω0 − iε)
2πi −∞
Ã
!
R∞
eiωτ
1
dω
0
2πi
ω−ω
−iε
−∞
0
R∞
=
.
1
eiωτ
0
2πi −∞ ω+ω0 −iε dω
As integrais,
1
2πi
e
1
2πi
Z
∞
−∞
Z
∞
−∞
eiωτ
dω
ω − ω0 − iε
eiωτ
dω
ω + ω0 − iε
podem ser calculadas pelo método de residue. Os polos estão no
ω = ω0 + iε,
e
ω = −ω0 + iε
respectivamente, ou seja, ambos polos estão (infinitesimalmente) acima do eixo
real ω. Na hora de escolher o contorno fechado para aplicar o teorema de residuo,
devemos tomar cuidado do sinal do τ . Quando τ > 0, o caminho para o qual o
grande semicirculo anula tem que estar no semiplano superior, pois
eiωτ = ei(Re ω+i Im ω)τ = eiτ Re ω−τ Im ω
e este fator anula só quando Im ω > 0 para τ > 0. Neste caso, o caminho fechado
contem os dois polos, pois ambos estão acima do eixo real. Por outro lado,
quando τ < 0, o caminho da integral deve fechar passando o grande semicirculo
no plano inferior de ω. Neste caso, o contorno da integral exclui os dois polos
(ver a figura abaixo). Consequentemente, temos
Z ∞
1
eiωτ
dω = θ (τ ) e±iω0 τ .
2πi −∞ ω ∓ ω0 − iε
Com isto, temos
S
−1
b (τ ) S = θ (τ )
G
µ
e+iω0 τ
0
110
0
e+iω0 τ
¶
.
Finalmente
µ
e+iω0 τ
0
0
e+iω0 τ
³ ´
b ,
= θ (τ ) exp Aτ
b (τ ) = θ (τ ) S
G
onde foi utilizada a propriedade,
µ +iω τ
∙
µ
¶
e 0
+iω0
0
−1
S
S = exp τ S
0
e+iω0 τ
0
³ ´
b .
= exp Aτ
¶
S −1
(191)
0
−iω0
¶
S
−1
¸
(192)
(193)
A Eq.(191) é nada mais que a Eq.(182).
Exercício: Mostre Eqs.(192) e (193).
Exercício: O que acontece se escoher o sinal + do termo ±iε ?
Exercício: Repita o calculo acima para um oscilador harmônico amortecido.
A obtenção do resultado Eq.(191) pode parecer que muito complicada comparada com o argumento da Eq.(182). Mas o método de transformada de Fourier
é fundamental quando o sistema em questão contem um espectro contínuo de
modo de oscilação. Isto acontece nos problemas de equação de onda. A seguir,
estudamos tal sistema que possui um espectro contínuo de modo de oscilação,
ou seja o sistema de meio contínuo ou sistema de campo.
111
5
Transformação Linear no espaço de funções e
a base contínua
Na seção anteiror a matriz A pode ter dimensão maior que 2. De modo geral,
para uma dada matriz A, a equação
z 0 = Az
(194)
onde varrendo todos os vetores z ∈ V, pode ser considerada um mapeamento de
um espaço vetorial V para o prório V. A transformação linear entre vetores é
em geral pode ser escrica na forma acima. Sabemos que o conjunto de funções
forma um espaço vetorial sendo uma função é vetor neste contexto. Então, deve
existir o análogo deste tipo de mappeamento, ou seja a quantidade equivalente
a matriz no espaço de funções. A resposta é a integral do tipo
Z
f (x) = K (x, x0 ) g(x0 )dx0 ,
(195)
onde K (x, x0 ) é chamado de kernel. Lembramos que na Eq. (??) o simbolo A
está expressando a matriz que é formada de (n × n) números. Em geral, falando
de matriz, os vetores também são expressos usando numa base. Assim, Eq. (??)
significa explicitamente
X
zi0 =
Aik zk .
(196)
k
onde zi é o i − esima componente de z, ou seja, a projeção do vetor z para o
vetor base ei normalizado,
zi = (ei , z) ,
onde o conjunto
{ei , i = 1, ..., n}
forma uma base ortonormal em V . Temos
(ei , ej ) = δij .
(197)
Introduzimos a notação de Dirac para expressar vetores e vetores adjuntos como
z, ei → |zi, |ii,
eTi → hi|,
e o produto escalar entre dois vetores a e b fica escrito como
³ ´
a, b → ha|bi
Assim, o i − esimo componente do vetor z na base {ei } fica expresso como
zi = hi|zi.
112
(198)
A condição de ortonormalizade Eq.(197) fica expressa por
hi|ji = δij .
(199)
O vetor z pode ser escrita como a combinação linear dos vetores base {ei }, ou
seja,
X
X
|zi =
zi |ii =
|ii zi ,
(200)
i
i
Substituindo a Eq.(198) na equação acima, temos
X
|iihi|zi
|zi =
i
Ã
X
=
i
!
|iihi| |zi
= Λ |zi
A quantidade,
Ã
X
Λ≡
i
(201)
(202)
!
|iihi|
é uma matriz (n × n) e a Eq.(202) constitui uma transformação linear que vale
para qualquer vetor |zi ∈ V. Portanto, concluímos que Λ é a matriz de identidade,
Λ = 1.
Assim, obtemos a relação de completeza,
X
|iihi| = 1
i
quando
{|ii, i = 1, ..., n}
é uma base ortonormal em V.
Para estabelecer a correspondência formal entre Eqs.(196) e (195), vamos
associar a notação vetorial para uma função f (x) como
f (x) → |f i.
Mais concretamente, supormos que existe uma base {|xi, −∞ < x < ∞} tal que
f (x) = hx|f i.
e
|f i =
Z
∞
−∞
dx |xi f (x)
113
(203)
(204)
As Eqs.(203) e (204) correspondem a Eqs.(198) e (200), respectivamente, so que
considerando que a variável x é contínua, a soma foi transformada em integral.
Usando na Eq.(200), o produto escalar da Eq.(204) com o vetor base |xi, temos
Z ∞
dx0 |x0 i f (x0 )
f (x) = hx|f i = hx|
−∞
Z ∞
=
dx0 hx|x0 i f (x0 )
(205)
−∞
o que corresponde a igualdade no caso de vetor n dimensional,
¡ ¢ X
zi = eTi ·
ej zj
j
X¡
¢
eTi · ej zj .
=
j
A Eq.(205) pode ser comparada com a identidade,
Z ∞
δ (x − x0 ) f (x0 ) dx0 .
f (x) =
−∞
o que mostra que
hx|x0 i = δ (x − x0 ) .
(206)
A Eq.(206) análogo da Eq.(199), ou seja a condição de ortonormalizade da base
{{|xi, −∞ < x < ∞}} . Esta equação mostra que a “função” correspondente
ao vetor |x0 i é nada mais que função δ de Dirac. Ainda a função δ (x − x0 )
corresponde a matriz de identidade
δ (x − x0 ) ←→ δij .
(207)
A relação de completeza pode ser obtido substituindo a Eq.(203) na Eq.(204).
Temos
Z ∞
dx |xihx|f i
|f i =
−∞
µZ ∞
¶
=
dx |xihx| |f i
−∞
= Λ |f i
o que mostra que devemos ter que a quantidade Λ é a identidade no espaço de
funções,
Z ∞
dx |xihx| = 1.
(208)
−∞
Note que este é um operador no espaço de funções. A relação de completeza
acima é extremamente útil para transformar as propriedades formais entre
funções vetores. Por exemplo, sejam |f i e |gi os dois vetores correspondente
114
a funções, f (x) e g (x) correspondente. O produto escalar entre dois vetores
pode ser escrito como
(f, g) = hf |gi.
Mas
|gi = 1|gi
µZ ∞
¶
=
dx |xihx| |gi,
−∞
e portanto,
µZ ∞
¶
hf |gi = hf |
dx |xihx| |gi
−∞
Z ∞
=
dxhf |xihx|gi
−∞
Z ∞
=
dxf ∗ (x) g (x)
−∞
o que é a definição usual do produto escalar entre duas funções, permitindo
complexo. Aqui, foi utilizada a relação de reciprocidade de produto escalar com
corpo complexo,
hf |xi = hx|f i∗ = f ∗ (x) .
Para estabelecer a correspondência mais explicita e observar o papel de “medida” da integração dx, vamos considerar o seguinte procedimento. Primeira,
consideramos o intervalo de x, [−X, X] em segumentos de largura ∆x,
{x−N , x−N +1 , ..., , xN }
onde
xi = i × ∆x, i = −N, ..., N,
e
x−N = −X,
xN = X,
e ainda
∆x =
(xN − x−N )
2X
=
.
2N + 1
2N + 1
115
Para uma dada função f (x) , vamos associar um vetor coluna,
⎞
⎛
f−N
⎜ f−N +1 ⎟
⎟
⎜
f ≡⎜
⎟
..
⎠
⎝
.
=
fN
⎛
⎜
√
⎜
∆x ⎜
⎝
f (x−N )
f (x−N +1 )
..
.
f (xN )
⎞
⎟
⎟
⎟.
⎠
√
Aqui, o signifcado de introdução do fator ∆x fica óbvio quando pensar em
produto escalar entre dois vetores como este,
N
³
´
X
f ·g =
fi∗ gi
i=−N
N
³√ ´2 X
=
∆x
f ∗ (xi ) g (xi )
i=−N
No limite de
N → ∞,
2X
∆x →
→ 0,
2N + 1
a soma acima converge a integral,
∆x
N
X
i=−N
f ∗ (xi ) g (xi ) →
Z
X
dxf ∗ (x) g (x) .
−X
Para cobrir todo domínio para x, tomamos o limite X → ∞ no final das operações. Assim a correspondência explicita com o vetor e a função seria
⎞
⎛
f (x−N )
⎜ f (x−N +1 ) ⎟
√
⎟
⎜
|f i ←→ ∆x ⎜
⎟.
..
⎠
⎝
.
f (xN )
Vamos considerar a base ortonormal,
{ei , i = −N, .., N }
116
onde
⎞
0
⎜ .. ⎟
⎜ . ⎟
⎜ ⎟
⎜ 0 ⎟
⎜ ⎟
⎟
ei = ⎜
⎜ 1 ⎟
⎜ 0 ⎟
⎜ ⎟
⎜ . ⎟
⎝ .. ⎠
0
⎛
é o vetor unitário que tem elemento 1 no i − esimo posição. Da propriedade
hx|f i = f (x) ,
o vetor |xi deve corresponder ao vetor coluna,
1
|xi i = √
ei ,
∆x
pois
Temos
³
´ √
ei · f = ∆xf (xi ) .
1
(ei · ej )
∆x
1
=
δij
∆x
hxi |xj i =
No limite de ∆x → 0, temos
1
δij → δ (x − x0 ) ,
∆x
onde denotamos
xi → x,
xj → x0 .
A relação de completeza fica
X
i
|xi ihxi | =
=
ou
X
i
No limite ∆x → 0, temos
Z
1
ei eTi
∆x
1 b
1,
∆x
∆x |xi ihxi | = b
1.
dx|xihx| = b
1,
117
recuperando a Eq.(208). Desta forma, a base {|xi, −∞ < x < ∞} essencialmente igual a base ortonormal {ei , i = −N, .., N } , exceto a normalização,
⎛ ⎞
0
⎜ .. ⎟
⎜ . ⎟
⎜ ⎟
⎜ 0 ⎟
⎟
1 ⎜
⎜ 1 ⎟.
|xi i → √
⎜
∆x ⎜ 0 ⎟
⎟
⎜ ⎟
⎜ . ⎟
⎝ .. ⎠
0
Podemos usar outra normalização. Por exemplo, as vezes utlizamos a normalização,
⎛ ⎞
0
⎜ .. ⎟
⎜ . ⎟
⎜ ⎟
√
⎜ 0 ⎟
⎟
2π ⎜
⎜ 1 ⎟
|xi i → √
⎜
∆x ⎜ 0 ⎟
⎟
⎜ ⎟
⎜ . ⎟
⎝ .. ⎠
0
Neste caso, a condição de ortogonormalidade fica
hx|x0i = 2πδ (x − x0 ) ,
e a completeza fica
1
2π
Z
dx|xihx| = b
1.
Daqui adiante, quando não mencionamos, adotamos a normalização Eq.(206) e
portanto, a completeza Eq.(208).
5.1
Transformação de base e Kernel como elemento de
Matriz de operador
Como mencionamos, no caso de vetor usual, a equação correspondente, Eq(194)
é a expressão simbólica da transformação Eq.(196). Mas quando está definido a
mudança de base no espaço vetorial V, podemos considerar a Eq.(194) como a
forma independente de escolhe da base, e neste caso, a quantidade expressa por
A é dita “tensor”. A introdução da base {|xi, −∞ < x < ∞} que introduzimos
na sessão anterior é útil extrair o conceito de operador linear de forma mais
abstrato.
Da Eq.(195),
Z
f (x) =
K (x, x0 ) g (x0 ) dx0 ,
118
substituimos as expressões
f (x) = hx|f i,
g (x0 ) = hx0 |gi,
e temos
hx|f i =
Z
dx0 K (x, x0 ) hx0 |gi.
Usando a completeza em {|xi, −∞ < x < ∞} , temos
Z
|f i = dx|xihx|f i
Z
Z
= dx|xi dx0 K (x, x0 ) hx0 |gi
∙Z
¸
Z
0
0
0
=
dx dx |xiK (x, x ) hx | |gi.
Podemos definir um objeto dentro de colchet como K,
Z
Z
K = dx dx0 |xiK (x, x0 ) hx0 |.
(209)
Este objeto é um operador no espaço de função vetor, definindo uma transformação linear,
|f i = K|gi.
(210)
Da Eq.(209), usando a ortonormalidade, podemos verificar que
hx|K|x0 i = K (x, x0 )
o que mostra o kernel K (x, x0 ) pode ser considerado como elemento de matriz
do operador K na base {|xi, −∞ < x < ∞} .
5.2
Operador diferencial como Kernel
Se generalizar o kernel até funções generalizadas (distribuições), podemos expressar os operadores diferenciais na forma integral. O operador diferncial, d/dx
é uma transformação linear sobre as funções difernciáveis,
f 0 (x) =
d
f (x) .
dx
Esta equação pode ser escrita na forma integral,
Z
d
f 0 (x) = dx0 δ (x − x0 ) 0 f (x0 )
dx
(211)
Note que
δ (x − x0 )
d
d
=
δ (x − x0 )
0
dx
dx
= δ 0 (x − x0 )
119
(212)
Exercício: Prove a Eq.(212).
Consideramos o vetor |f 0 i por
hx|f 0 i = f 0 (x) .
Temos
0
Z
dx |xif 0 (x)
Z
Z
= dx |xi dx0 δ 0 (x − x0 ) f (x0 )
∙Z
¸
Z
=
dx dx0 |xiδ 0 (x − x0 ) hx| |f i
|f i =
Podemos definir o operador diferencial no espaço vetorial como
Z
Z
D = dx dx0 |xiδ 0 (x − x0 ) hx|
tal que
|f 0 i = D |f i.
Usando a Eq.(212), podemos escrever tambem que
Z
Z
d
D = dx dx0 |xiδ (x − x0 ) hx|
dx
Naturalmente, o elemento de matriz do operador D na base {|xi, −∞ < x < ∞}
fica
hx|D|x0 i = δ 0 (x − x0 ) .
Exercício: Mostre que
hx|D2 |x0 i = δ 00 (x − x0 ) ,
Mostre também que
hx|D2 |f i =
d2
f (x) .
dx2
Exercício: Definimos o operador Da por
Da = eaD
∞
X
an n
=
D ,
n!
n=0
onde a é um número. Mostre que
hx|Da |f i = f (x + a) .
120
5.3
Problema de Autovalor
Vimos acima, para uma dada tranformação linear,
Z
f (x) = dx0 K (x, x0 ) g (x) ,
podemos associar um operador K tal que
hx|K|x0 i = K (x, x0 )
o que corresponderia à uma matriz no caso de espaço vetorial de dimensão finita.
No caso de dimensão finita, sabemos que para uma matriz hermitiana15 A, os
autovalores são reais e autovetores podem formar uma base ortogonais. Isto é,
para uma matriz (n × n) hermitiana, ou seja, A = A† , se
A z = λz,
(213)
então
λ∗ = λ.
Exercício: Prove as afirmações acima.
A condição de existência da solução não trivial da equação Eq.(213), temos
b = 0,
det |A − λI|
o que é a equação algebrica de ordem n para λ. Então existem n raizes
{λi , i = 1, ..n}. Para cada raiz λi denotamos o autovetor correspondente
zi .
Então, se
λi 6= λj ,
(zi , zj ) = 0.
Exercício: Prove as afirmações acima.
Se o autovalor λ for r vezes degenerado, então, existem r autovetores linearmente independente correspondente a este autovalor. Estes autovetores podem
ser ortogonalzados.
1 5 Uma matriz A é dita hermitiana quando seu conjugado hermitiano é igual a ela mesma,
ou seja
A = A† ,
onde o conjugado hermitiano A† é definido como
³ ´
= A∗ji .
A†
ij
121
Exercício: Prove as afirmações acima.
O que corresponde no espaço de funções? Formalmente o problema de autovalor fica
Z
K (x, x0 ) f (x0 ) dx0 = λf (x) .
(214)
ou na forma de notação de Dirac,
K |f i = λ|f i.
(215)
Para um dado função kernel K (x, x0 ), se existe a função f (x) que satisfaz a
Eq.(214), λ é chamado de autovalor e f (x) é chamado de autofunção do kernel
K. O kernel K (x, x0 ) é dita simétrico se
K (x, x0 ) = K (x0 , x) ,
e hermitiano se
K (x, x0 ) = K ∗ (x0 , x)
Exercício: Para um dado vetor de coluna de n componentes, n, obtenha os
autovalores e autovetores da matriz,
A = n nT .
0
Exercício: Para o kernel simetrico, K (x, x0 ) = 2ex+x , obtenha autovalor e
autofunção da equação
Z 1
K (x, x0 ) y(x0 )dx0 = λy (x) .
0
Exercício: Seja K (x, x0 ) o kernel simétrico que tem a forma,
K (x, x0 ) =
n
X
gj (x) gj (x0 )
j=1
onde gi (x) são funções reais contínuas em [0 ≤ x ≤ 1] . Então, mostre que
a equação de autovalor,
Z 1
K (x, x0 ) y(x0 )dx0 = λy (x)
0
possui no máximo n autovalores.
Para um kernel mais geral, não é possível obter a solução de problema de
autovalor e autofunção genericamente, as vezes não é garantido a existência de
soluções. Mas a seguinte teorema garante que o paralelismo entre o espaço de
funções num intervalo finito e o espaço vetorial de dimensção finita.
122
Teorema (Hilbert): Para um kernel simétrico, K (x, x0 ) ,
K (x, x0 ) = K (x0 , x) ,
e contínuo em [0 ≤ x ≤ 1] e [0 ≤ y ≤ 1] , existe a solução y (x) e autovalor
λ da equação integral,
Z 1
K (x, x0 ) y (x0 ) dx0 = λy (x) .
(216)
0
O teorema acima vale também para o kernel complexo, desde que o kernel
seja hermitiano,
∗
K (x, x0 ) = K (x0 , x) .
(217)
Neste caso, podemos mostrar que o autovalor é real.
Note que no teorema acima, estamos considerando o intervalo, [0 ≤ x ≤ 1]
mas os argumentos pode ser facilmente generalizados para qualquer intervalo
finito, [a ≤ x ≤ b] pela mudança de variável
x → x0 = (b − a) x + a.
Quando se trata de problema de autovalores, Eq.(216), naturalmente estamos
considerando o espaço de funções definido no intervalo [0 ≤ x ≤ 1] , e portanto,
o produto escalar está definido como
Z 1
(f, g) =
f (x)∗ g (x) dx
0
A condição de hermiticidade de kernel pode ser re-escrita como
(f, Kg) = (Kf, g)
(218)
para qualquer funções f e g, onde a notação Kg se refere a função de x definida
por
Z
1
K (x, x0 ) g (x0 ) dx0
Kg (x) =
0
Exercício: Mostre que a condição de hermiticidade do kernel K (x, x0 ) , Eq.(217)
é equivalente a Eq.(218).
Exercício: Mostre que os autovalores de kernel K (x, x0 ) hermitiano são reais.
Exercício: Mostre que os autofunções de kernel K (x, x0 ) hermitiano correspondente aos difrenferentes autovalores são ortogonais, ou seja
Z 1
K (x, x0 ) y1 (x0 ) dx0 = λ1 y1 (x) ,
0
e
Z
1
K (x, x0 ) y2 (x0 ) dx0 = λ2 y2 (x) ,
0
123
com
λ1 6= λ2
então
Z
1
∗
y1 (x) y2 (x) dx = 0.
0
O exercício acima mostra que os autofunções de um kernel hermitiano pertencentes a diferentes autovalores são ortogonais. A questão interessante é que
quantos autofunções linearmente independentes para um autovalor? Podemos
mostrar que para um autovalor, no máximo, número finito de autofunções pertencentes a este autovalor. Em outras palavras, a degenerescência de um autovalor é finito. Antes de mostrar isto, vamos generalizar a desigualdade de Bessel
para um conjunto de funções ortogonais.
Quando o conjunto de funções,{ei (x) , i = 1, ..n} é dito o sistema ortonormal quando
(ei , ej ) = δij .
Para uma dada função f (x) contínua definida no intervalo, [0 ≤ x ≤ 1] , podemos
definir a série de Fourier formal,
n
X
Sn (x) =
ci ei (x) ,
(219)
i=1
com
ci = (ei , f )
Z 1
e∗i (x) f (x) dx.
=
(220)
0
Temos
n
X
i=1
c2i
≤
Z
0
1
|f (x)|2 dx.
(221)
Está a desigualdade de Bessel.
Exercício: Prove a desigualdade de Bessel, (221).
Exercício: Argumente que a definição de coeficientes, Eq.(220) é a melhor
opção para aproximar a função f (x) em termos de soma Eq.(219) para
um dado sistema orto-normal, {ei (x) , i = 1, ..., n}
A desigualdade de Bessel vale mesmo para n → ∞. Agora, vamos voltar
a questão de degenerescência de um autovalor. Suponha que existem n autofunções linearmente independentes, {yi (x) , i = 1, ...., n} para um dado autovalor λ,
Z
1
K (x, x0 ) yi (x0 ) dx0 = λyi (x) . i = 1, ..., n
0
124
Queremos mostrar que n < ∞. A partir de n funções linearmente independentes,
podemos construir um sistema orto-normal
{ei (x) , i = 1, ..., n}
através do procedimento de orto-normalização de Schmidt. O método de ortonormalização de Schmidt se resume a seguinte.
Método de Schmidt Seja {yi (x) , i = 1, ...., n} são funções contínuas linearmente independentes (com coeficientes complexos), definidas no intervalo,
[0 ≤ x ≤ 1] . O conjunto {ei (x) , i = 1, ...., n} construido de seguinte procedimento,
f1 (x)
,
kf1 (x)k
(f2 (x) − (e1 , f2 ) e1 (x))
e2 (x) =
,
kf2 (x) − (e1 , f2 ) e1 (x)k
..
.
´
³
P
(e
,
f
)
e
(x)
fn (x) − n−1
i
n
i
i=1
°
en (x) = °
Pn−1
°
°
°fn (x) − i=1 (ei , fn ) ei (x)°
e1 (x) =
forma um sistema orto-normal, onde
Z 1
ei (x)∗ fj (x) dx,
(ei , fj ) =
0
kf k = (f, f )1/2 .
Exercício: Demostre que o conjunto {ei (x) , i = 1, ...., n} satisfaz
(ei , ej ) = δij .
Exercício: Mostre que se {yi (x) , i = 1, ...., n} são autofunções de K (x, x0 )
com autovalor λ, então as funções {ei (x) , i = 1, ...., n} também são.
Temos
Z
1
K (x, x0 ) ei (x0 ) dx0 = λei (x) . i = 1, ..., n
0
Agora, podemos considerar a série de Fourier,
Sn (x) =
n
X
ci ei (x) ,
i=1
com
ci = ci (x)
Z 1
∗
ei (x0 ) K (x, x0 ) dx0
=
0
125
(222)
Então da desigualdade de Bessel (considerando K (x, x0 ) como função de x0 ),
temos
Z 1
n
X
2
2
|ci (x)| ≤
|K (x, x0 )| dx0 .
0
i=1
Mas da Eq.(222)
ci (x) = λe∗i (x)
então
n
X
i=1
Integrando em x, temos
Z
0
n
1X
i=1
|ci (x)|2 dx = λ2
portanto
2
|ci (x)|2 = λ2
λ n≤
2
n
X
i=1
|ei (x)|2
n Z
X
i=1
1
0
|ei (x)|2 dx
=λ n
Z
1
dx
0
Z
1
0
2
|K (x, x0 )| dx0 < ∞,
ou seja n é finito.
De forma análoga, podemos provar que o conjunto de autovalores é um
conjunto descreto exceto o ponto λ = ∞. Para provar isto, basta mostrar que
para um dado número N < ∞ arbitrário, existem apenas números finitos de
autovalores λ0i s que satisfazem
−N < λi < N.
(223)
Exercício: Mostre que para um número finito arbitrário N, o número total de
autovalores que fica no intervalo de [−N, N ] é finito.
O cojunto de todas autofunções de K é dito o sistema completo de autofunções de K. Para este conjunto, vale a seguinte teorema.
Teorema (Hilbert-Schmidt) Sejam f (x) uma função contínua no intervalo
[0 ≤ x ≤ 1] , e K (x, x0 ) um kernel hermitiano. Uma função g (x) escrita
na forma,
Z
1
K (x, x0 ) f (x0 ) dx0 ,
g (x) =
0
pode ser expressa pela seguinte série com convergência homogênea,
X
g (x) =
gi ei (x) ,
i
onde {ei (x) , i = 1, ....} é o sistema completo de autofunções de K.
126
(224)
O teorema acima mostra que para uma classe de funções que podem ser expressas na forma Eq.(224), o conjunto completo de autofuções {ei (x) , i = 1, ....}
forma uma base completa. Quando o kernel K não singular, ou seja, possui o
inverso, o conjunto de funções que podem ser expressas na forma Eq.(224) cobre
o todo espaço igual a o conjunto de todas funções contínuas, {f (x)} definidas
neste intervalo. Assim, o conjunto completo de K forma uma base completa
das funções contínuas definidas no intervalo [0 ≤ x ≤ 1] .
5.4
Série de Fourier como exemplo
Vamos ver o exemplo. Consideramos o kernel,
K (x, x0 ) = iδ 0 (x − x0 ) .
Aparentemente, o kernel acima satisfaz a condição de hermiticidade,
K (x0 , x) = iδ 0 (x0 − x)
= −iδ 0 (x − x0 )
∗
= K (x, x0 ) ,
já que a derivada de função δ de Dirac é uma função generalizada ímpar. Mas
na verdade, a condição vale só quando tratamos o intervalo [−∞, ∞] pela construção da base ortonormal, {|x >} . Quando consideramos um intervalo finito,
por exemplo, [−L, L] , devemos levar em conta a condição de contorno nos pontos, x = ±L. A condição para hermiticidade de um operador escrita na forma
de produto escalar entre dois vetores f e g fica
(f, Kg) = (Kf, g) .
Mas
Kg (x) =
Z
=i
e
(f, Kg) =
Z
L
K (x, x0 ) g (x0 ) dx0
−L
d
g (x)
dx
L
f ∗ (x) (Kg (x)) dx
−L
Z L
∙
¸
d
∗
f (x) g (x) dx
=i
dx
−L
Introduzindo a integração em parte, temos
Z L ∗
df (x)
L
g (x) dx
(f, Kg) = i f ∗ (x) g (x)|−L − i
dx
−L
¶∗
Z µ
df (x)
i
g (x) dx
= i [f ∗ (L) g (L) − f ∗ (−L) g (−L)] +
dx
= i [f ∗ (L) g (L) − f ∗ (−L) g (−L)] + (Kf, g)
127
(225)
Desta forma, vimos que para ter a hermiticidade Eq.(225) para f e g independentes, devemos ter
f ∗ (L) g (L) = f ∗ (−L) g (−L)
ou seja, f e g tem que ser periódicas. Assim, consideramos o espaço vetorial
formado de todas as funções contínuas e periódicas no intervalo [−L, L] . Neste
espaço, o operador
d
i
dx
se torna hermitiano,
µ
¶ µ
¶
d
d
f, i g = i f, g
dx
dx
e teremos conjunto completo de autofunções {em (x)} que satisfaz
d
em (x) = λm em (x) .
dx
Esta equação é facilmente integrada, tendo
i
em (x) = Ce−iλm x .
Naturalmente as autofunções também tem que satisfazer a condição de periocidade, e temos
e+iλm L = e−iλm L
ou seja
2iλm L = 2πm,
onde m inteiro. Temos
π
m.
L
A constante C pode ser determinada pela normalização, e temos
1
C=√ .
2L
Finalmente concluímos que o conjunto
½
¾
1 −i Lπ mx
em (x) = √ e
, m = 0, ±1, ±2, . . .
2L
λm =
forma uma base ortonormal para o espaço de funções periódicas em [−L, L] .
Ou seja, qualquer função contínua e periódica f (x) em [−L, L] pode ser escrita
como combinação linear destas funções base,
com
∞
X
π
1
f (x) = √
cm e−i L mx ,
2L m=−∞
Z L
π
1
cm = √
ei L mx f (x) dx,
2L −L
o que nada mais que a série de Fourier complexa.
A idéia descrita acima pode ser extendido para o intervalo inteiro, [−∞, ∞] ,
num espaço de funções que chamdado de espaço de Hilbert.
128
6
Problemas
1. Consideramos as seguintes funções
f0 (x) = 1,
f1 (x) = x,
..
.
fn (x) = xn .
..
.
A partir destas funções, usando o método de ortogonalização do Schmidt,
obtenha as primeiras 4 funções {e0 (x) , e1 (x) , e2 (x) , . . . , } que satisfaz
Z
1
e∗i (x) ej (x) dx = δij
−1
(polinômios de Legendre).
2. Consideramos uma equação diferencial,
Dx f (x) = h (x) ,
(226)
onde Dx é um operador diferencial, por exemplo
Dx =
d2
+ w2 .
dx2
(a) Expresse o kernel K (x, x0 ) correspondente ao operador Dx acima.
(b) Para um dado kernel K (x, x0 ) , se existe o kernel G tal que
Z
K (x, x0 ) G (x0 , x00 ) dx0 = δ (x − x0 ) ,
chamamos G o kernel inverso de K e escrevemos
G = K −1 .
Mostre que a função de Green de uma equação diferencial é o kernel
inverso do kernel correspondente a operador diferencial da equação.
3. Sejam K (x, x0 ) um kernel hermitiano e {ei (x) , i = 1, ....., } o sistema
completo de autofunções de K (x, x0 ) com respectivos autovalores, {λi , i = 1, .....} .
Mostre que
X
K (x, x0 ) =
λi e∗i (x) ei (x0 )
i
129
4. Seja {ϕi (x) , i = 1, ....., } uma base orto-normal de espaço de funções contínuas definidas no intervalo [0 ≤ x ≤ 1] . Definimos o “elemento de matriz” Kij do kernel K (x, x0 ) por
Kij = (ϕi , Kϕj )
Z 1 Z 1
∗
dx
dx0 ϕi (x) K (x, x0 ) ϕj (x0 ) .
=
0
0
Definimos o traço desta matriz por16
T r (K) =
X
Kij
i
Mostre que
T r (K) =
X
λi
i
Mostre também que
T r (K) =
Z
1
K (x, x) dx
0
5. Mostre que a integral Gaussiana é
r
Z ∞
π
−ax2
e
dx =
I=
, α>0
α
−∞
(Calcule I 2 usando o sistema de coordenadas polar)
6. Considermos um espaço vetorial de dimensão n. Seja A matriz n × n
simétrico real com autovalores positivos, b um vetor constante e C um
escalar constante. Mostre que
Z
Z ∞
T
T
T −1
1
···
e−c+b A b .
dn x e−(x Ax+2b x+c) = p
det (A/π)
−∞
(Desafio: Será que tem o análogo para o caso de espaço de funções?)
7. Obtenha a integral de Fresnel,
Z
1 6 Podemos
como
∞
sin αx2 dx.
0
também definir o determinante como produto de todos os autovalores de K,
Y
Det (K) =
λi .
i
Esta quantidade é usada frequentemente na Mecânica Quântica avançada.
130
8. Calcule a integral
I=
Z
∞
0
x3
dx.
ex − 1
9. Sejam K (x) e f (x) funções contínuas suaves com K (0) = 1, e f (0) = 0.
Mostre que
Z x
Z x
df
d
0
0
0
K (x − x ) f (x ) dx =
K (x − x0 ) 0 dx0
dx 0
dx
0
10. Numa experiência, foram obtidos N valores de um observável y como
função da variável x em diferentes pontos.
{(xi , yi ) , i = 1, ....., N }
Queremos determinar uma função f (x) como uma combinação linear de
funções base conhecidas, {ϕi (x) , i = 1, ...m} , onde m < N. Determine
os “melhores” coeficientes da combinação linear.
11. Seja f = f (z) uma função analítica e escrevemos
f (z) = u (x, y) + iv (x, y)
Introduzindo a representação radial,
z = reiθ ,
temos
u = u (r, θ) ,
v = v (r, θ) .
Expresse a condição de Cauchy-Riemann em termos de variáveis (r, θ) .
12. Descobra a folha de Riemann em que a função
√
√
f (z) = z − a + z − b
fica uma função unívalor analítica exceto os dois pontos, z = a e z = b,
onde a e b são constantes reais positivos.
13. Consideramos um espaço bidimensional sem carga elétrica (por exemplo,
o plano x − y num sistema que tem invariância translacional na direção
z, submetido a um campo elétrico externo). Mostre que neste espaço, o
valor de potencial eletrostático de qualquer ponto (x, y) é igual ao valor
médio dos valores de potencial em cima de um círculo de raio R do ponto.
14. Teorema de Morera é um espécie de inverso da teorema integral
H de Cauchy.
Diz, se f (x, y) é contínua num domínio R no plano (x, y) e se f (x, y) (dx + idy) =
0 para qualquer contorno fechado em R, então f (z) é analítica em R.
Prove este teorema.
131
15. Fórmula de Poissson:
(a) Seja f (z) uma função analítica dentro e em cima de um círculo C de
raio a. Mostre que para z dentro deste círculo, vale
¸
I ∙
f (z 0 )
1
f (z 0 )
f (z) =
−
dz 0
2πi C z 0 − z z 0 − (a2 /z ∗ )
(b) Usando o resultado acima, deduza a fórmula de Poisson,
¡
¢
1
f reiφ =
2π
Z
2π
0
a2
+
1
2π
Z
r2
¢
¡
a2 − r2
f reiθ dθ.
− 2ar cos (θ − φ)
16. Considere a integral,
G (x, x0 ; τ ) =
∞
0
2
eik(x−x ) e−k τ dk
−∞
0
onde x, x e τ reais e τ > 0.
(a) Mostre que
0 2
1
G (x, x0 ; τ ) = √
e−(x−x ) /4τ .
4πτ
(b) Mostre que o resultado acima vale mesmo para τ um número imaginário puro.
17. Mostre que
∇2
7
µ ¶
1
= −4πδ 3 (r)
r
Equações Diferenciais Parciais
O uso da transformada de Fourier e função de Green pode se tornar mais
poderoso nas resoluções de equações diferenciais parcias. Vamos estudar alguns equações diferenciais parcias que aparecem frequentemente nos problemas
de física.
7.1
Equação de Onda
132