Unidade VI - Estabilidade de Sistemas
de Controle com Retroação
Conceito de Estabilidade;
Critério de Estabilidade de Routh-Hurwitz;
A Estabilidade Relativa de Sistemas de Controle com
Retroação;
A Estabilidade de Sistemas com Variáveis de Estado;
Estabilidade de Sistema usando MATLAB.
Prof. José Renes Pinheiro, Dr.Eng
1
Caso 2. Zeros na 1a. Coluna enquanto alguns dos outros elementos da linha
são não-nulos.
q( s ) = s 5 + 2 s 4 + 2s 3 + 4 s 2 + 11s + 10
Exemplo de um polinômio característico O arranjo de Routh será
s 5 1 2 11
s 4 2 4 10
s3 ε 6
s 2 -c1 10
s1 d1
s 0 10
onde
c1 =
4ε − 12
ε
=
−12
ε
d1 =
6c1 − 10ε
→6
c1
Há duas mudanças de sinal, portanto o sistema é Instável.
Instável
Prof. José Renes Pinheiro, Dr.Eng
2
Exemplo de um polinômio característico O arranjo de Routh será
s4 1
s3 1
s2 ε
s1 c1
s0 K
1
1
K
q( s) = s 4 + s 3 + s 2 + s + K
K
onde
c1 =
ε − K −K
=
ε
ε
O sistema é Instável para qualquer valor de K.
Caso 3. Zeros na 1a. Coluna enquanto todos os outros elementos da linha
são nulos.
Esta condição ocorre quando o polinômio contem singularidades que são
localizadas simetricamente em torno da origem do plano s. Assim, quando ocorre
fatores como (s+)(s- ) ou (s+j)(s-j).
Este problema é contornado usando-se um polinômio auxiliar, U(s), que precede
imediatamente a linha de elementos zeros do arranjo de Routh.
A ordem do polinômio auxiliar é sempre par.
Prof. José Renes Pinheiro, Dr.Eng
3
Exemplo, considere um sistema de 3a. ordem com um polinômio característico:
O arranjo de Routh será
3
s
s2
1
2
s1 8 − K
2
s0 K
4
K
q( s) = s 3 + 2s 2 + 4s + K
O sistema será Estável quando:
0< K <8
Quando K=8, os fatores do polinômio característico são:
q( s ) = ( s + 2)( s + j 2)( s − j 2)
A resposta do caso marginal é uma oscilação não aceitável.
Caso 4. Equação característica com raízes repetidas sobre o eixo j.
Se as raízes sobre o eixo imaginário j forem simples, o sistema é marginalmente
estável, uma vez que possui um modo senoidal não-amortecido. Se as raízes
forem repetidas, a resposta do sistema será instável, com a forma t[sen(t+)].
Os critérios de Routh-Hurwitz não revelam esta forma de instabilidade.
Prof. José Renes Pinheiro, Dr.Eng
4
Exemplo: Controle de Solda
Nas fabricas de automóveis de hoje são usados grandes robôs de solda. O
cabeçote de solda é deslocado para diferentes pontos do corpo do automóvel e se
requer uma rápida resposta e precisa resposta. Assim, deseja-se determinar a
faixa de valores de K e de a para o qual o sistema é estável. A EC é
K ( s + a)
1 + G( s) = 1 +
s ( s + 1)( s + 2)( s + 3)
Portanto,
s4 1
s3 6
s 2 b3
s1 c3
s 0 Ka
q( s ) = s 4 + 6s 3 + 11s 2 + ( K + 6) s + Ka = 0
11
( K + 6)
Ka
Ka
60 − K
b3 =
≥0
6
b3 ( K + 6) − 6 Ka
c3 =
≥0
b3
Ka ≥ 0
Prof. José Renes Pinheiro, Dr.Eng
E
S
T
Á
V
E
L
5
A relação requerida entre K e a é
(60 − K )( K + 6)
a≤
,quando a for positivo.
36 K
Assim, se K=40, será necessário que a 0,639.
A forma Geral da EC de um sistema de ordem n é
s n + an−1s n−1 + an−2 s n−2 + L + a1s + ωnn = 0
Obtém-se a forma normalizada da equação s n + bs n−1 + cs n−2 + L + 1 = 0
onde s = s / ωn
s3 5 s 2 2 s
+
+
+1 = 0
3
2
ω n 2 ω n 4 ωn
Exemplo, normaliza-se s 3 + 5s 2 + 2 s + 8 = 0
ou
s 3 + 2,5s 2 + 0,5s + 1 = 0
É ESTÁVEL,
ESTÁVEL pois bc=1,25.
O Critério de Estabilidade de Routh-Hurwitz
n
Equação Característica
Critério
2
s2+bs+1=0
b>0
3
s3+bs2+cs+1=0
bc-1>0
4
s4+bs3+cs2+ds+1=0
bcd-d2-b2>0
5
s5+bs4+cs3+ds2+es+1=0
bcd+b-d2-b2e>0
6
s6+bs5+cs4+ds3+es2+fs+1=0
(bcd+bf-d2-b2e)e+b2c-bd-bc2f-f2+bfe+cdf>0
Prof. José Renes Pinheiro, Dr.Eng
6
Estabilidade Relativa de Sistemas de Controle com Retroação
Se o sistema satisfaz Routh-Hurwitz e for absolutamente estável é desejável
determinar a estabilidade relativa, i.é, é necessário investigar o amortecimento
relativo de cada uma das raízes da EC.
A estabilidade relativa de um sistema pode ser definida como uma propriedade
que é medida pela parte real relativa de cada raiz ou par de raízes.
Como a estabilidade relativa é ditada pela localização das raízes da EC, a primeira
abordagem usando uma formulação no plano s é estender o Critério de RouthHurwitz para assegurar a estabilidade relativa. Isto pode ser feito usando-se uma
substituição de variáveis, que desloca os eixos do plano s de modo a utilizar o
critério de Routh-Hurwitz.
Prof. José Renes Pinheiro, Dr.Eng
7
Exemplo: Descolamento de Eixos
Considere-se a EC simples de 3a. ordem
q( s) = s 3 + 4s 2 + 6s + 4
Como 1a. Tentativa, seja sn=s+2 e observe-se que se obtém um arranjo de Routh
sem ocorrência de zero na 1a. Coluna. Contudo, ao se definira variável deslocada
sn igual a s+1, obtém-se
3
2
3
2
( sn − 1) + 4( sn − 1) + 6( sn − 1) + 4 = sn + sn + sn + 1
O arranjo é
sn3
sn2
sn1
sn0
1 1
1 1
0 0
1 0
Há raízes sobre o eixo imaginário deslocado que
pode ser obtidas a partir do polinômio auxiliar
U ( sn ) = sn2 + 1 = ( sn + j ) + ( sn − j ) → [ s + (1 ± j )]
O deslocamento de eixo do plano s para assegurar a estabilidade relativa de um
sistema é uma abordagem muito útil, particularmente para sistemas de ordem
elevada com diversos pares de raízes a malha fechada complexas conjugadas.
Prof. José Renes Pinheiro, Dr.Eng
8
Estabilidade de Sistemas com Variáveis de Estado
Se o sistema que se investiga for representado por um diagrama de fluxo de sinal
com variáveis de estado, a partir de um conjunto de equações diferenciais de
estado. Obtém-se a EC calculando o determinante (s) do diagrama de fluxo.
Exemplo: Estabilidade de um sistema de 2a. Ordem
Sendo o sistema descrito por 2 equações diferenciais de 1a. ordem
x&1 = −3 x1 + x2
x&2 = x2 − Kx1 + Ku
Usando a formula de Mason:
3 malhas
que não
se tocam
L1 = s −1
O determinante é
∆ = 1 − ( L1 + L2 + L3 ) + L1L2
L2 = −3s −1
L3 = − Ks
−2
= 1 − ( s −1 − 3s −1 − Ks −2 ) + (−3s −2 )
∆ = s 2 + 2s + ( K − 3) = 0
Como todos os coeficientes devem ser positivos,
positivos é necessário que K>3.
Para que o Sistema seja ESTÁVEL.
ESTÁVEL
Prof. José Renes Pinheiro, Dr.Eng
9
Um método de obtenção da EC diretamente da equação diferencial vetorial se
baseia no fato de que a solução do sistema livre é uma função exponencial.
A equação diferencial vetorial sem sinais de entrada é
x&= Ax
A solução é de forma exponencial e se pode definir uma constante tal que
xi(t)=kieit. Os i são chamados de raízes características ou de autovalores do
sistema e são simplesmente as raízes da EC. Assim,
λt
λt
λke = Ake
ou
Que pode ser reescrita como
λx = Ax
(λI - A)x = 0
A solução deste sistema de equações simultâneas possui uma solução não-trivial
se e somente se o determinante se anular, i.é somente se
det(λI - A)x = 0
A equação de ordem n em resultante do calculo do determinante é a EC, assim a
estabilidade do sistema pode ser prontamente determinada.
Prof. José Renes Pinheiro, Dr.Eng
10
Exemplo de Projeto: Controle de manobre de veículo sobre lagartas
As 2 lagartas são operadas com velocidades diferentes a fim de manobrar o veículo.
Selecionar K e a de modo que o sistema seja estável e que o erro estacionário a um
comando em rampa seja menor ou igual a 24% da magnitude do comando.
A EC do sistema com retroação é 1 + G G ( s ) = 0
c
1+
Por conseguinte,
K (s + a)
=0
s( s + 1)( s + 2)( s + 5)
s( s + 1)( s + 2)( s + 5) + K ( s + a) = 0 → s 4 + 8s 3 + 17 s 2 + ( K + 10) s + Ka = 0
s4
s3
s2
s1
0
1
8
b3
c3
s Ka
17
Ka
( K + 10)
Ka
126 − K
≥0
8
b ( K + 10) − 8Ka
c3 = 3
≥0
b3
b3 =
Ka ≥ 0
Prof. José Renes Pinheiro, Dr.Eng
11
Portanto, é necessário que
K ≥ 126
(126 − K )( K + 10) − 64 Ka ≥ 0
Ka ≥ 0
O erro estacionário para uma entrada em rampa
r(t)=At, t>0 é
ess = A / K v
onde
K v = lim sGcG = Ka /10
s →0
Assim,
10 A
ess =
Ka
Para ess ser igual a 23,8% de A, será requerido ka=42 K=70 e a=0,6.
Um outro projeto aceitável seria K=50 e a=0,84.
Varias outras combinações podem satisfazer Ka=42, mantendo na região estável.
Prof. José Renes Pinheiro, Dr.Eng
12
Estabilidade de Sistemas usando o MATLAB
Estabilidade de Routh-Hurwitz:
Dada a EC com coeficientes fixos, considere a equação
Sistema de controle a Malha Fechada
q( s ) = s 3 + s 2 + 2s + 24
Arranjo de Routh-Hurwitz:
Pode-se usar também a função
roots(deng) para calcular os pólos do
sistema (raízes do polinômio).
Prof. José Renes Pinheiro, Dr.Eng
13
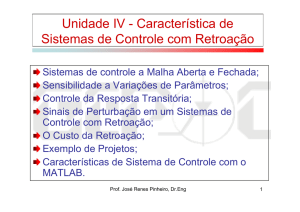
Toda as vezes em que a EC for um único parâmetro, pode-se utilizar o método de
Routh_Hurwitz para determinar a faixa de valores que o parâmetro pode assumir
mantendo a estabilidade. Seja a EC
3
2
q( s) = s + 2s + 4s + K
O sistema será Estável quando:
0≤ K ≤8
Gráfico da localização da raízes para 0<K<20
Prof. José Renes Pinheiro, Dr.Eng
14
A função for...end define um laço de calculo repetitivo
Prof. José Renes Pinheiro, Dr.Eng
15
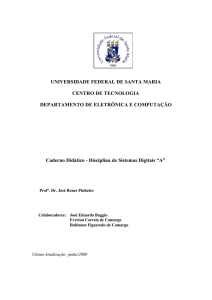
A estabilidade de Sistema com varáveis de estado:
Um sistema descrito na forma de espaço de estado. A estabilidade pode ser
calculada com a equação característica associada com a matriz de sistema. Assim,
det ( sI - A) = 0
Se todas as raízes da EC possuírem parte real negativa (Re(si)<0), então o sistema
será estável.
A função poly pode ser usada para calcular a EC associada a matriz A.
A função poly é usada para formar um polinômio a partir de um vetor de raízes.
Sendo a Matriz A
−8 −16 −6
A = 1
0
0
0
1
0
Polinômio característico associado é
s 3 + 8s 2 + 16 s + 6
Se A for uma matriz nxn, poly(A) é o polinômio
característico representado pelo vetor linha n+1
elementos cujos elementos são os coeficientes
do polinômio característico.
Prof. José Renes Pinheiro, Dr.Eng
16
Método do Lugar das Raízes
Próxima Aula Unidade VII
Conceito de Lugar das Raízes;
O Procedimento do Lugar das Raízes;
Projeto de Parâmetros pelo Método do Lugar das Raízes;
Sensibiliade e Lugar das Raízes;
Controaldor de Três Termos (PID);
Exemplo de Projeto;
Lugar das Raízes usando MATLAB.
Prof. José Renes Pinheiro, Dr.Eng
17