UNIVERSIDADE FEDERAL RURAL DE PERNAMBUCO
DEPARTAMENTO DE MATEMÁTICA
MONOGRAFIA DE GRADUAÇÃO
O PROBLEMA DE FORÇA CENTRAL: ESTUDO
DO MOVIMENTO DE UM SATÉLITE ARTIFICIAL
EDJANE OLIVEIRA DOS SANTOS
Sob orientação da Profa . Dra Maité Kulesza
Recife, 2008.
O PROBLEMA DE FORÇA CENTRAL: ESTUDO DO
MOVIMENTO DE UM SATÉLITE ARTIFICIAL
Monografia de Graduação apresentada ao Departamento de Matemática da
Universidade Federal Rural de Pernambuco, para conclusão do curso de
Licenciatura em Matemática.
EDJANE OLIVEIRA DOS SANTOS
Sob orientação da Profa . Dra Maité Kulesza
Recife, 2008.
FOLHA DE APROVAÇÃO
”As leis da natureza nada mais são que pensamentos matemáticos de Deus”.
Kepler.
”A verdade não é monopólio de ninguém; é patrimônio comum das
inteligências”.
Leonel França, S.J.
Agradecimentos
À minha orientadora Profa . Dra Maité Kulesza, principalmente, pela amizade,
paciência e confiança dedicada a mim. Ao Prof. Dr. Antônio Carlos Miranda
pela atenção oferecida no esclarecimento de algumas dúvidas . Ao Prof. Carlos e ao meu amigo Adenilton pela ajuda no uso do LATEX. Ao Prof. Nivaldo
Andrade, responsável pela minha incursão na carreira de professora e paixão
que tenho pela matemática. Aos meus pais que me fazem almejar cada dia
mais ser uma pessoa melhor e também ao meu irmão Edmilson, pelas risadas,
brigas e incentivo. Aos meus colegas e amigos que contribuı́ram para o desenvolvimento deste trabalho e aos bons momentos na graduação. Ao CNPq
pelo apoio financeiro. E a Deus sempre, por iluminar meus passos nesta
caminhada.
1
Resumo
Este trabalho trata do estudo do Problema de Força Central, cuja aplicação
é feita no estudo do movimento de um satélite artificial ao redor da Terra. A
princı́pio é enunciado o Problema de Dois Corpos e logo seu estudo é reduzido
a um Problema de Força Central ou Problema de Kepler. Em seguida é vista
uma outra formulação deste problema que é a formulação Hamiltoniana e
através dela é garantido que para este problema existe uma única solução no
espaço. No estudo do Problema de Kepler as integrais primeiras garantem
um primeiro resultado acerca da dinâmica deste problema. De posse deste
resultado são obtidas as Leis de Kepler. Além disso, é obtida a classificação
da órbita conforme a energia seja negativa, nula ou positiva. Continuando
o estudo do Problema de Força Central, são definidos os seis elementos orbitais. Além disso, obtém-se a posição da partı́cula na órbita elı́ptica, em
coordenadas polares. Esta monografia é encerrada com o estudo da órbita
de um satélite artificial e com o estudo do movimento de queda do mesmo.
Sumário
1 Apresentação
1.1
8
Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
1.1.1
Justificativa . . . . . . . . . . . . . . . . . . . . . . . .
9
1.1.2
Conteúdo Apresentado . . . . . . . . . . . . . . . . . .
9
2 O Problema de Dois Corpos
2.1
11
Formulação do Problema . . . . . . . . . . . . . . . . . . . . . 11
2.1.1
Movimento Relativo . . . . . . . . . . . . . . . . . . . 14
2.1.2
Formulação Hamiltoniana . . . . . . . . . . . . . . . . 18
3 Estudo do Problema de Força Central
3.1
Movimento do Problema . . . . . . . . . . . . . . . . . . . . . 20
3.1.1
Leis de Kepler
. . . . . . . . . . . . . . . . . . . . . . 24
3.1.2
Classificação das Órbitas . . . . . . . . . . . . . . . . . 27
4 Os Elementos Orbitais
4.1
20
29
Definição . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5 Posição da Partı́cula na Órbita Elı́ptica
33
6 Estudo do Movimento de um Satélite Artificial
38
6.1
Movimento de um Satélite Artificial . . . . . . . . . . . . . . . 38
1
6.2
Movimento de Queda para a Terra . . . . . . . . . . . . . . . 42
6.2.1
Aproximações . . . . . . . . . . . . . . . . . . . . . . . 45
6.2.2
Energia Perdida . . . . . . . . . . . . . . . . . . . . . . 48
7 Conclusão
49
2
Lista de Figuras
FIGURA 2.1 - O Problema de Dois Corpos. . . . . . . . . . . . . . . . . . . . . 12
FIGURA 2.2 - O centro de massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
FIGURA 2.3 - O movimento relativo . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
FIGURA 2.4 - O centro de massa na origem do sistema. . . . . . . . . 15
FIGURA 2.5 - O Problema de Força Central. . . . . . . . . . . . . . . . . . . . . 17
FIGURA 3.1 - A cônica em coordenadas polares. . . . . . . . . . . . . . . . . . 23
FIGURA 3.2 - A Primeira Lei de Kepler. . . . . . . . . . . . . . . . . . . . . . . . 24
FIGURA 3.3 - Sistemas de coordenadas polares. . . . . . . . . . . . . . . . . . 25
FIGURA 4.1 - Elementos da órbita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
FIGURA 5.1 - O problema elı́ptico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3
FIGURA 6.1 - O problema da órbita de um satélite artificial. . .
37
FIGURA 6.2 - A órbita elı́ptica de um satélite. . . . . . . . . . . . . . . . . . 40
FIGURA 6.3 - A órbita circular de um satélite artificial . . . . . . . . . 43
FIGURA 6.4 - A direção tangencial e a direção normal. . . . . . . . .
44
FIGURA 6.4 - Componentes da velocidade . . . . . . . . . . . . . . . . . . . . . 45
FIGURA 6.5 - Trajetória em espiral . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
47
Lista de Sı́mbolos
S
Sol
P
Partı́cula
r
Vetor posição
m
Massa de uma partı́cula
r
Vetor posição em relação ao centro de massa
r’
Vetor velocidade
r”
Vetor aceleração
H
Função Hamiltoniana
h
Energia
C
Momento angular
5
e
Vetor de Laplace
ε
excentricidade
Ω
Longitude do nodo ascendente
ι
Inclinação da órbita
ω
Pericentro
a
Semi-eixo maior da órbita
b
Semi-eixo menor da órbita eliptica
T
Instante em que a partı́cula passa pelo pericentro
E
Anomalia excêntrica
v0
Velocidade inicial
r0
Posição inicial
β
Ângulo formado pela velocidade inicial com o raio vetor que une o
foguete com o centro da Terra.
vH
Componente da velocidade ao longo da horizontal local
6
vR
Componente radial da velocidade
7
Capı́tulo 1
Apresentação
1.1
Introdução
A Mecânica Celeste é uma área da Matemática que estuda o movimento dos
corpos celestes a partir das leis da Mecânica.
O problema fundamental da Mecânica Celeste é o Problema de n-corpos,
porém o único problema totalmente resolvido é o Problema de Dois Corpos,
cujo estudo é reduzido ao estudo de um Problema de Força Central.
Estudaremos, neste trabalho, o Problema de Força Central, o qual é aplicado no estudo do movimento de um satélite artificial ao redor da Terra. O
objetivo desta monografia é obter resultados sobre o movimento dos satélites
artificiais.
O primeiro passo é reduzir o estudo do Problema de Dois Corpos ao estudo do Problema de Força Central ou Problema de Kepler. Em seguida,
garantir que para o Problema de Força Central, existe e é unica a sua solução.
8
Feito isto, inicia-se o estudo do Problema de Kepler. Neste estudo são obtidos resultados acerca da dinâmica deste problema.
Este trabalho é encerrado com o estudo da órbita de um satélite artificial
e com o estudo do movimento de queda do mesmo.
1.1.1
Justificativa
O estudo do movimento de um satélite artificial sob influência de uma Força
Central é de grande importância na definição da rota espacial, para que estes
possam desempenhar com sucesso as missões as quais estão destinados.
1.1.2
Conteúdo Apresentado
No capı́tulo 2 é estudado a dinâmica do Problema de Dois Corpos e mostra-se
que seu estudo é reduzido a um Problema de Força Central. Neste capı́tulo,
também é feita uma outra formulação deste problema, que é a formulação
Hamiltoniana e através dela é garantido que para este problema existe uma
única solução no espaço, definida em um intervalo máximo de tempo.
No capı́tulo 3 é feito um estudo do Problema de Força Central de modo
a obter um primeiro resultado que forneça informações sobre o movimento
deste problema. De posse deste resultado, são obtidas todas as Leis de Kepler. Além disso, obtém-se a classificação da órbita conforme a energia seja
nula, positiva ou negativa .
No capı́tulo 4 foram definidos os elementos orbitais com suas respectivas
funções.
9
No capı́tulo seguinte é determinada a posição da partı́cula na órbita elı́ptica,
em coordenadas polares.
O capı́tulo 6 é dedicado a investigar a órbita de um satélite artificial ao
redor da Terra e estudar o movimento de queda do mesmo devido o atrito
com a atmosfera.
10
Capı́tulo 2
O Problema de Dois Corpos
Neste capı́tulo, vamos enunciar o Problema de Dois Corpos e reduzir seu estudo a um Problema de Força Central ou Problema de Kepler. Em seguida,
veremos uma outra formulação do Problema de Força Central que é a formulação Hamiltoniana.
2.1
Formulação do Problema
O Problema de Dois Corpos consiste em estudar o movimento de duas partı́culas
materiais, sujeitas unicamente a ação mútua de suas atrações gravitacionais.
Suponhamos que a primeira partı́cula seja S com massa m1 e a segunda
partı́cula seja P com massa m2 , com vetores posição r1 e r2 respectivamente
num sistema em R3 (Fig. 2.1).
11
Figura 2.1: O problema de dois corpos
Isto é, pela Segunda Lei de Newton:
m1 r001 = −
Gm1 m2 r1 − r2
kr1 − r2 k2 kr1 − r2 k
(2.1)
m2 r002 = −
Gm1 m2 r2 − r1
.
kr1 − r2 k2 kr1 − r2 k
De (2.1), temos que:
m1 r001 + m2 r002 = 0.
Integrando a equação acima duas vezes com respeito à variável tempo t:
m1 r1 + m2 r2 = At + B,
12
(2.2)
onde A e B são vetores constantes.
Agora, seja R o vetor-posição do centro de massa de m1 e m2 (Fig. 2.2)
Figura 2.2: O centro de massa
Isto é:
def m1 r1 + m2 r2
R =
,
M
onde M = m1 + m2 .
Perceba que utilizando à equação (2.2), temos que:
R=
At
B
+ ,
M
M
(2.3)
de onde resulta que o centro de massa das partı́culas materiais move-se uniformente (R0 = A ), sobre uma reta no espaço.
M
13
2.1.1
Movimento Relativo
Foi visto anteriomente como é o movimento do centro de massa das partı́culas
materiais. Agora vamos ver como é o movimento destas partı́culas em relação
ao centro de massa.
Os movimentos de m1 e m2 relativos ao centro de massa são da seguinte
forma.
Figura 2.3: O movimento relativo
Sejam
r1 = R + r1
r2 = R + r2 ,
e
(2.4)
logo, r1 e r2 denotam respectivamente os vetores-posição de m1 e m2 , em
relação ao centro de massa dos dois corpos (Fig. 2.3).
14
Decorre da equação (2.3) que R00 = 0, logo:
r001 = r001
r002 = r002
e
Portanto, podemos reescrever o sistema (2.1) como:
m1 r001 = −
Gm1 m2
(r1 − r2 )
krk3
(2.5)
m2 r002 = −
Gm1 m2
(r2 − r1 ),
krk3
onde r = r2 − r1 .
Observe que o sistema (2.5) é muito semelhante ao sistema (2.1), assim
podemos pensar, de agora em diante, que o centro de massa das partı́culas
materiais encontra-se na origem do sistema (Fig. 2.4).
Figura 2.4: Centro de massa na origem do sistema
15
Da afirmação anterior segue que,
m1 r1 + m2 r2
=R=0
M
=⇒
m1 r1 + m2 r2 = 0
de onde, temos as seguintes relações:
r1 = −
m2
r,
m1 2
r2 = −
m1
r
m2 1
(2.6)
r=−
M
r,
m2 1
r=
M
r.
m1 2
Usando estas relações temos que o sistema (2.5) é equivalente ao sistema:
r001 = −
Gλ1
r
kr1 k3 1
(2.7)
r002 = −
onde λ1 =
m32
M2
e λ2 =
Gλ2
r,
kr2 k3 2
m31
.
M2
A primeira destas equações descreve o movimento de r1 e a segunda descreve o movimento de r2 , ambos em torno do centro de massa do sistema.
Note que no sistema (2.7), ambas as equações são independentes, portanto
basta determinar a solução de uma delas que teremos a outra solução por
(2.6).
Uma outra maneira de estudar o sistema (2.7) é usar o vetor r definido
anteriormente, logo o sistema (2.7) é equivalente a:
16
r00 = −
Gλ
r,
krk3
(2.8)
Assim, somos levados a estudar o movimento de uma partı́cula P de massa
m2 que é atraı́da pela partı́cula S de massa m1 , segundo a equação (2.8).
Figura 2.5: O problema de força central
A partı́cula S (geralmente a mais massiva), supõem-se estar situada num
ponto fixo do espaço, o qual pode ser tomado como a origem do sistema de
coordenadas inercial.
Este problema na Mecânica é conhecido como Problema de Força Central
ou Problema de Kepler (Fig. 2.5).
Portanto, o estudo do Problema de Dois Corpos reduz-se ao estudo do Problema de Força Central.
17
2.1.2
Formulação Hamiltoniana
Agora vamos ver a formulação Hamiltoniana do Problema de Kepler e enunciar um importante resultado de equações diferenciais ordinárias que afirma
que a equação (2.8) sempre tem solução desde que a posição inicial não seja
a origem.
Tomando µ = Gλ, então podemos reescrever a equação (2.8) na equação
abaixo:
r00 = −
µr
.
krk3
(2.9)
O espaço das possı́veis posições do Problema de Kepler é R3 − {0}. Se
introduzirmos a variável v = r0 ∈ R3 , podemos escrever (2.9) como o seguinte
sistema de equações diferenciais ordinárias de primeira ordem:
r0 = v
(2.10)
v0 = −
µ
r,
krk3
Definamos a seguinte função:
1
µ
H = H(r, v) = kvk2 −
,
2
krk
que corresponde a energia total do sistema. Então, o sistema (2.10) pode ser
escrito como:
r0 =
∂H
∂v
(2.11)
v0 =
∂H
,
∂r
18
o qual é chamado de sistema Hamiltoniano com função Hamiltoniana H.
Pelo teorema da existência e unicidade das equações diferenciais de segunda
ordem1 , fica garantido que:
Teorema 1 Dado (r0 , r00 ) ∈ (R3 − {0}) × R3 , existe e é única a solução r(t)
de (2.11) definida em um intervalo máximo de tempo, contendo t = 0, com
condições iniciais r(0) = r0 , r0 (0) = r00 .
1
Seja:
r00 + pr0 + qr = g
r(t0 ) = r0
r0 (t0 ) = v0 ,
onde t0 ∈ (a, b) e r0 , v0 são dados. Se p, q, g : (a, b) −→ < são contı́nuas em (a, b) então o
problema de valor inicial tem uma, e somente uma solução defenida em todo (a, b).
19
Capı́tulo 3
Estudo do Problema de Força
Central
Neste capı́tulo, vamos estudar o Problema de Força Central e obter resultados
acerca da dinâmica deste problema.
3.1
Movimento do Problema
No estudo do Problema de Força Central existem funções diferenciáveis
que permanecem constantes ao longo do movimento, chamadas integrais
primeiras ou constantes de integração .
Neste caso, o Problema de Kepler admite as seguintes integrais primeiras:
• A energia: h = 12 kr0 k2 − krµk
• O momento angular: C = r × r0
• O vetor de Laplace: µ e + krrk = r0 × C
20
A partir dessas integrais primeiras, obtém-se um primeiro resultado acerca
dos diferentes movimentos do Problema de Kepler:
a) Se C = 0, então o movimento é retilı́neo.
b) Se C 6= 0, então o movimento ocorre em um plano, que passa pelo centro
de atração S, ortogonal a C e que contém o vetor e.
bi ) Se e = 0, então o movimento é circular e uniforme.
bii ) Se e 6= 0, então o movimento descreve uma cônica com um foco em S,
eixo e e excentricidade ε = |e|.
Demonstração:
a) Se C = 0, segue da equação de e, que krrk = −e, ou r(t) = −e.kr(t)k.
Logo o movimento é retilı́neo e o vetor posição tem a mesma direção
de vetor de Laplace e.
b) Se C 6= 0, temos por definição que C é ortogonal a r, logo r pertence ao
plano determinado pelo vetor C e que passa pela origem. Por outro
lado, fazendo o produto escalar da equação de e pelo vetor C, teremos:
e · C = 0. Logo e é ortogonal ao vetor C.
21
bi ) Se e = 0, temos que a equação de e será:
µ·
r
= r0 × C.
krk
Fazendo o produto escalar da expressão acima com o vetor r e usando
a identidade vetorial a · (b × c) = c · (a × b) = b · (c × a), temos:
µ
µ
r·r
= r · (r0 × C)
krk
krk2
= C · (r × r0 )
krk
krk =
kCk2
,
µ
ou seja, krk é constante, logo o movimento é circular. Da expressão da
energia, temos:
µ
,
kr k = 2 h +
krk
0
então kr0 k é constante (M.U.), pois h, µ , e krk são constantes.
bii ) Se e 6= 0. Denote por (r, θ) as coordenadas no plano do movimento com
origem em S e eixo polar e (Fig. 3.1).
22
Figura 3.1: A cônica em coordenadas polares
Fazendo o produto escalar da equação de e por r, teremos:
r·r
µ e·r+
= (r × C) · r
krk
µ(e · r + krk) = kCk2
(3.1)
µ(krk cos θkek + krk) = kCk2
krk =
kCk2 /µ
,
(ε cos θ + 1)
a qual é a equação de uma cônica com excentricidade ε = kek, eixo e
2
e parâmetro p = kCk .
µ
23
De posse deste resultado, são obtidas as Leis de Kepler, como veremos a
seguir.
3.1.1
Leis de Kepler
• Quando do item bii ) a cônica descrita é uma elipse, temos que essa
afirmação corresponde à primeira lei de Kepler, que expressa: ”as
órbitas dos planetas em torno do Sol são elipses com o Sol em um
dos focos”(Fig. 3.2).
Figura 3.2: A primeira Lei de Kepler
Comentário 1 O valor θ = 0 corresponde ao ponto chamado pericentro da órbita, que nós dá a menor distância da partı́cula ao centro
atrator, dada por r =
p
.
1+ε
Já θ = π, corresponde ao ponto chamado
apocentro da órbita, que nos dá a maior distância da partı́cula ao centro
atrator, dado por r =
p
.
1−ε
Quando o centro atrator é o Sol os pon-
tos de menor e maior distância são chamados de: perihélio e afélio, e
quando o centro atrator é a Terra são chamados de perigeu e apogeu,
respectivamente.
24
• No caso C 6= 0, outra consequência importante pode ser deduzida da
expressão do momento angular. Vamos introduzir no plano de movimento um sistema de coordenadas polares centrado em O que forma
um sistema em R3 com o vetor C.
Figura 3.3: Sistema de coordenadas polares
Então, r = (r cos θ, r sin θ, 0) e C = (0, 0, c). Como r0 = (−r sin θθ0 , r cos θθ0 , 0),
obtemos que:
r × r0 = r2 θ0 .
Daı́,
r2 θ0 = C
(3.2)
Sabemos que a equação da área descrita pelo raio vetor de t0 a t, é
25
dada por:
Z
t
A(t) =
t0
1
krk2 θ0 dt
2
De (3.2) resulta que:
Z
t
A(t) =
t0
kCk
1
krk2 θ0 dt =
(t − t0 ),
2
2
de onde temos a Segunda Lei de Kepler,
dA
dt
(3.3)
= kc2 k , isto é a taxa de
variação da área descrita pelo raio vetor é constante.
• Considere uma elipse de semi-eixos a e b, então a sua área é πab.
Tomando P como perı́odo do movimento, temos:
πab
A(t, t0 )
=
P
t − t0
Pela equação (3.3) temos que a equação acima, torna-se:
πab
kCk
=
,
P
2
quadrando a expressão acima e usando b2 = a2 (1 − ε2 ), temos que:
a3
µ
= 2.
2
P
4π
Esta equação corresponde à Terceira Lei de Kepler que expressa: ”os
26
cubos dos semi eixos maiores das órbitas elı́pticas dos planetas, estão
entre si, como os quadrados dos perı́odo de seus movimentos em torno
do Sol”.
3.1.2
Classificação das Órbitas
Além disso, a partir das integrais primeiras podemos obter a classificação da
órbita conforme a energia seja negativa, nula ou positiva.
Propriedade 1 As constantes h, C e e satisfazem a seguinte relação:
µ2 (ε2 − 1) = 2hkCk2 .
Demonstração:
De fato, quadrando a expressão de e, teremos:
(e · r)
µ kek + 2
+ 1 = kr0 × Ck2 = kr0 k2 kCk2
krk
2
2
Usando as equações de h e (3.1) na expressão acima, temos:
2 kCk2
µ
2
µ kek +
− krk + 1 = 2kCk h +
krk
µ
krk
2
2
2.µ2 kCk2 − krkµ
2kCk2 µ
µε +
|
+ µ2 = 2kCk2 h +
krk
µ
krk
2 2
2kCk2 µ 2krkµ3
2kCk2 µ
2
2
µε +
−
+ µ = 2kCk h +
krk
µkrk
krk
2 2
27
(3.4)
µ2 ε2 − 2µ2 + µ2 = 2hkCk2
µ2 (ε2 − 1) = 2hkCk2
Decorre da equação (3.4) que:
• h<0
=⇒ 0 < ε < 1 =⇒ órbita elı́ptica.
• h = 0 =⇒
• h>0
ε = 1 =⇒ órbita parabólica.
=⇒ ε > 1 =⇒
órbita hiperbólica.
Continuando nosso estudo do Problema de Kepler, no próximo capı́tulo vamos definir os elementos orbitais
28
Capı́tulo 4
Os Elementos Orbitais
Neste capı́tulo, vamos definir os seis elementos orbitais e suas respectivas
funções.
4.1
Definição
Considere {e1 , e2 , e3 } um referencial inercial canônico no espaço. De modo
que este sistema tenha:
i) A sua origem localizada no centro do Sol;
ii) O plano da eclı́ptica (plano da órbita da Terra) seja o plano fundamental
de referência (plano xy);
iii) O eixo das abscissas seja dirigido para o ponto da órbita da Terra
que cruza o equador celeste em seu movimento ascendente, chamado
Equinócio de Março.
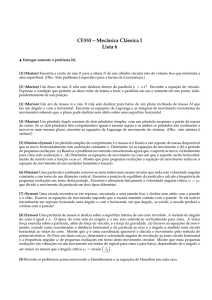
Este sistema é chamado de sistema heliocêntrico eclı́ptico. Neste sistema,
quando o momento angular não é ortogonal ao plano fundamental de referência, o plano da órbita intersecta-o ao longo de uma reta, chamada a
29
linha dos nodos. No movimento da partı́cula ao longo da órbita, ela intercepta a linha dos nodos duas vezes, em seu movimento ascendente e em seu
movimento descendente. No primeiro caso, o ponto de intersecção e dito
nodo ascendente e no segundo caso é dito nodo descendente.
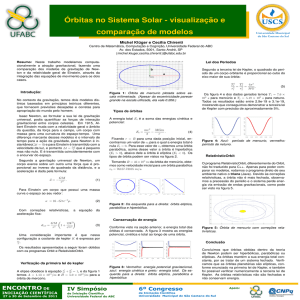
Figura 4.1: Elementos da órbita
Posto isto, determina-se os seis elementos orbitais:
• A longitude do nodo ascendente, que é o ângulo Ω que a linha dos nodos faz com o eixo das abscissas. Este ângulo varia entre 0 e 2π.
• A inclinação da órbita, que é o ângulo ι que o plano da órbita faz com
o plano fundamental de referência. Este ângulo varia entre 0 e π.
30
• A excentricidade que é ε = |e|.
• O pericentro, que é o ângulo ω entre o vetor de Laplace e e a linha dos
nodos, medido no sentido positivo do movimento da partı́cula.
• A quinta constante é o tamanho da órbita, que depende do tipo da
mesma. No caso da elipse, ele é dado pelo semi-eixo maior. Já na órbita
hiperbólica, é usado o semi-eixo transverso e na órbita parabólica, a
distância do foco ao vértice.
• A última constante é de caráter cinemático e é tomada como sendo o
instante T em que a partı́cula passa pelo pericentro.
As primeiras cinco constantes (Ω, ι, ε, ω, a) definem a geometria do problema
(Fig. 4.1), isto é, o plano da órbita no espaço e neste plano caracterizam a
forma, a posição e o tamanho da órbita
Mais precisamente:
A longitude do nodo ascendente e a inclinação da órbita definem o plano
da órbita no espaço.
A excentricidade e o pericentro definem a forma e a posição da órbita em seu
plano.
31
A quinta constante define o tamanho da órbita.
No capı́tulo a seguir, vamos obter a posição da partı́cula na órbita elı́ptica,
em coordenadas polares.
32
Capı́tulo 5
Posição da Partı́cula na Órbita
Elı́ptica
Teorema 2 As coordenadas polares (r, θ), (r = krk) da partı́cula são dadas
pelas seguintes equações:
r = a(1 − ε cos E)
r
θ
1+ε
E
=
tg
,
tg
2
1−ε
2
onde o ângulo E (anomalia excêntrica) é definido pela equação de Kepler
E − senE =
2π
(t − T ),
P
onde P é o perı́odo do movimento e T o tempo de passagem pelo pericentro
Demonstração:
33
Façamos a seguinte mudança de coordenadas ξ = x e η = ab y. Logo:
a elipse
x2
a2
2
+ yb2 = 1 é transformada na circunferência ξ 2 + η 2 = a2 (Fig. 5.1).
Feito isso, temos as seguintes relações:
i) d(S, B) = r cos θ = a cos E − d(O, S) = a(cos E − ε), onde ε =
d(O,S)
.
a
ii) Como senE = ηa , temos que:
√
b
b
2
rsenθ = d(B, P ) = η = asenE = bsenE = a 1 − ε2 senE
a
a
Figura 5.1: O problema elı́ptico
34
Quadrando as expressões em i) e ii) e somando, obtemos:
r = a(1 − ε cos E),
(5.1)
que é a coordenada r da partı́cula.
Substituindo a equação (5.1) em (i), podemos escrever que:
cos θ =
cos E − ε
1 − ε cos E
(5.2)
Da trigonometria sabe-se que:
θ
1 − cos θ
tg
=
.
2
1 + cos θ
2
Substituindo (5.2) em (5.3), obtemos:
θ
1 + ε (1 − cos E)
tg
=
.
2
1 − ε (1 + cos E)
2
Note que, de (5.3) podemos escrever a expressão acima como:
θ
1+ε 2 E
tg
=
.tg
,
2
1−ε
2
2
assim,
r
1+ε
E
θ
=
tg
,
tg
2
1−ε
2
35
(5.3)
que é a coordenada θ da partı́cula.
Para verificar a equação de Kepler, lembremos a Segunda Lei de Kepler:
´
Area(SCP
)
πab
πa2 √
=
=
1 − ε2 ,
t−T
P
P
por outro lado,
Rc
´
ydx
b √
Area(BCP
)
= Rbc
= = 1 − ε2 ,
´
a
ηdx
Area(BCQ)
b
de onde resulta que:
√
´
´
Area(SCP
) − Area(SBP
)
=
1 − ε2 =
´ ´
Area(OCQ) − Area(OBQ)
π 2
a
P
√
1 − ε2 (t − T ) − ( 12 r2 cos θsenθ)
1 2
a E − ( 12 a2 cos EsenE)
2
Substituindo r cos θ e rsenθ pelas relações em i) e ii) na equação acima,
temos:
√
1 − ε2 =
π 2
a
P
√
√
1 − ε2 (t − T ) − 21 a2 1 − ε2 senE(cos E − ε)
1 2
a E − 12 a2 cos EsenE
2
1
π
1
(E − cos EsenE) = (t − T ) − senE(cos E − ε)
2
P
2
E=
2π
(t − T ) + εsenE
P
36
E − εsenE =
2π
(t − T )
P
que é a equação de Kepler.
No próximo capı́tulo, vamos aplicar o estudo do Problema de Kepler no
estudo do movimento de um satélite artificial.
37
Capı́tulo 6
Estudo do Movimento de um
Satélite Artificial
Neste capı́tulo, vamos estudar a órbita de um satélite artificial ao redor da
Terra e estudar o movimento de queda do mesmo devido ao atrito com a
atmosfera.
6.1
Movimento de um Satélite Artificial
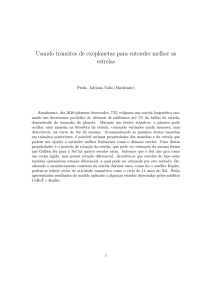
Considere o seguinte problema: um satélite artificial é lançado de um foguete
a uma distância r0 do centro da Terra e com velocidade v0 fazendo um ângulo
β com o raio vetor que une o foguete com o centro da Terra.
Vamos supor que o problema é um movimento central, cujo centro é a Terra
e a Força Central sobre o satélite é dada pela Lei da Gravitação de Newton.
38
Figura 6.1: O problema da órbita de um satélite artificial
A partir dos dados iniciais, (r0 , v0 e β), e µ = gR2 podemos escrever a
expressão da energia (h = 21 kr0 k2 − krµk ) como:
1
gR2
h = v02 −
,
2
r0
Note que:
GmM
R2
(6.1)
= mg =⇒ µ = GmM = mgR2 , onde R é o raio da Terra.
Usando os dados iniciais e a propriedade |r × r0 | = |r||r0 |senβ, podemos
escrever a expressão para o momento angular (C = r × r0 ) da seguinte forma:
C = r0 vθ ,
onde vθ = v0 sin β.
39
(6.2)
Usando as equações (6.1) e (6.2) podemos tirar algumas conclusões sobre
a órbita do satélite:
i) De acordo com a equação (6.1), temos que:
Se
r0 v02 < 2gR2 =⇒ h < 0 =⇒
órbita elı́ptica.
Se
r0 v02 = 2gR2 =⇒ h = 0 =⇒
órbita parabólica.
Se
r0 v02 > 2gR2 =⇒ h > 0 =⇒
órbita hiperbólica.
No primeiro caso, ela pode sê-lo por pouco tempo, uma vez que a
Terra não é um ponto e por conseqüência, o satélite pode colidir com
a mesma. Para que esta colisão não acontecesse seria necessário que o
raio do satélite fosse maior que o raio da Terra (r > R).
Figura 6.2: A órbita elı́ptica de um satélite artificial
40
ii) Da equação µ2 (ε2 − 1) = 2hc2 e das expressões (6.1) e (6.2), obtemos:
2
2 r0 vθ2
r0 vθ vr
ε =
,
−1 +
gR2
gR2
2
(6.3)
onde vr = v0 cos β.
Segue de (6.3) que a órbita do satélite será circular (ε = 0) se:
r0 vθ2 = gR2
e
vr = 0,
ou seja, um satélite terá órbita circular se ele for lançado perpendicularmente ao raio vetor que liga o foguete ao centro da Terra (β = π2 ) e
se a velocidade inicial v0 satisfazer à relação:
r0 v02 = gR2
iii) Da equação da cônica, teremos:
p
r0 =
1 + ε. cos θ0
=⇒
1 vθ2 r0
cos θ0 =
−1
ε gR2
Derivando a equação da cônica em relação a θ e utilizando
0
(6.4)
d
dt
1
r
=
0
− θr0 r2 = − rC , obtemos:
senθ0 = −
r0 vθ vr
εgR2
Decorre de (6.4) e (6.5), que caso β = π2 ,
41
(6.5)
cos θ0 = 1,
cos θ0 = −1,
senθ0 = 0,
senθ0 = 0,
se r0 v02 > gR2 ,
=⇒ θ0 = 0 (6.6)
se r0 v02 > gR2 ,
=⇒ θ0 = π (6.7)
A expressão (6.6) implica que no caso de órbitas parabólicas (ε = 1) e
hiperbólicas (ε > 1), o ponto de lançamento é o perigeu.
De (6.6) e (6.7) têm-se que no caso de órbitas elı́pticas (0 < ε < 1) o
ponto de lançamento e um ápside1 , podendo ser o perigeu ou o apogeu.
6.2
Movimento de Queda para a Terra
Agora, vamos estudar o movimento de queda de um satélite artificial. Assim,
consideremos um satélite artificial descrevendo uma órbita circular ao redor
da Terra de raio R.
Vamos supor que a Terra está rodeada por uma atmosfera formada por uma
capa de gás de densidade uniforme, cujo raio externo é maior que o da órbita
do satélite, de modo que, a força de atrito2 que excerce sobre o satélite é
constante.
1
2
É um ponto de máximo ou de mı́nimo da função posição r.
É a força de contato, entre duas superfı́cies, que se opõem ao movimento de cada uma.
42
Figura 6.3: A órbita circular de um satélite artificial
Aplicando a equação da dinâmica do movimento circular uniforme:
Mm
v2
G 2 =m
R
R
r
=⇒
v=
GM
= constante,
R
onde G é a constante gravitacional, M a massa da Terra e m a massa do
satélite.
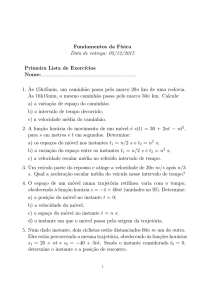
Quando o satélite cai para a Terra:
• Seu movimento descreve uma espiral.
• O ângulo que a velocidade forma com a direção radial já não é 90◦ , e
sim 90◦ − ϕ.
• A direção normal (que é perpendicular a direção da velocidade), não
coincide com a direção radial. Note que o ângulo que a direção normal
faz com a direção radial é ϕ.
43
Figura 6.4: A direção tangencial e a direção normal
Decompondo a força da atração F na direção tangencial e na direção
normal, as equações do movimento nestas direções são respectivamente:
mat = F senϕ − Fr
man = F cos ϕ,
onde Fr é a força de atrito.
• A primeira equação indica o módulo da velocidade v do satélite.
• A segunda equação indica a direção da velocidade.
A equação do movimento mat = F senϕ − Fr , é bastante complicada, pois a
força de atrito sobre o satélite dependerá em geral, de sua forma, da densidade do ar e da velocidade do satélite.
44
Porém, nesta monografia vamos fazer algumas aproximações que nos permitem descrever de forma mais simples o movimento do satélite.
6.2.1
Aproximações
Se supormos que o ângulo ϕ é pequeno e que portanto:
• A componente da velocidade ao longo da horizontal local é:
vH = v cos ϕ ≈ v.
• A componente radial vR é pequena, pois:
senϕ ≈ tan ϕ = −
vR
vH
Figura 6.5: As componentes da velocidade
45
A equação que descreve o movimento de um satélite artificial ao longo de
uma órbita circular de raio r e com velocidade vH = v cos ϕ é:
m
2
vH
GM m
=F =
.
r
r2
(6.8)
Simplificando e derivando (6.8) em relação a r, obtemos:
2vH
GM
dvH
F
=− 2 =−
dr
r
m
=⇒
dvH
F
=−
.
dr
2mvH
(6.9)
A aceleração tangencial vale, empregando a regra da cadeia:
dv
dr dv
dv
dvH
=
= vR
≈ vR
.
dt
dt dr
dr
dr
at =
(6.10)
De (6.9) e senϕ ≈ tan ϕ = − vvHR , temos que:
at ≈ −
1 F vR
1F
≈
senϕ.
2 m vH
2m
Com a aproximação acima, a equação do movimento do satélite (mat =
F senϕ − Fr ), é escrita:
1
F senϕ = F senϕ − Fr .
2
46
(6.11)
Note que, de (6.11) o ângulo que faz o vetor velocidade com a horizontal
local é:
senϕ =
2Fr
.
F
(6.12)
Usando (6.12) na equação mat = F senϕ−Fr , chegamos a seguinte conclusão:
mat = Fr ,
a força de atrito incrementa o módulo v da velocidade do satélite. Logo
a aceleração centrı́peta varia de um ponto para o outro, o que comprova a
trajetória em espiral quando o satélite cai para a Terra.
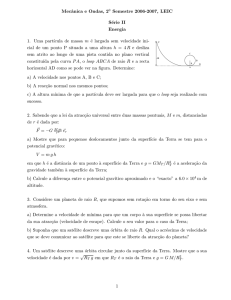
Figura 6.6: trajetória em espiral
Em suma o satélite artificial cai devido a força de atrito.
47
6.2.2
Energia Perdida
Por ser a força de atração conservativa3 , a energia do satélite artificial é constante em todos os pontos da circunferência que descreve.
Assim, a energia perdida por causa do atrito do satélite com atmosfera é
calculada da seguinte maneira:
Supondo que o satélite artificial descreve uma órbita circular de raio R com
velocidade v, a energia inicial é:
1 2
GM m
1 GM m
Ei = mv + −
,
=−
2
R
2 R
Supondo mais uma vez que o satélite descreve um órbita quase circular de
raio r e velocidade v, a energia final é:
GM m
1 2
1 GM m
,
Ef = mv + −
=−
2
r
2 r
Logo a energia perdida é:
GM m 1
1
4E = Ef − Ei =
−
<0
2
R r
3
Uma força é conservativa se for nulo o trabalho realizado por ela sobre uma partı́cula
que descreve qualquer percurso fechado.
48
Capı́tulo 7
Conclusão
Em virtude do estudo realizado do Problema de Força Central, foi possı́vel
obter resultados acerca do movimento deste problema, que por sua vez foram
aplicados no estudo do movimento dos satélites artificiais. Por meio do último
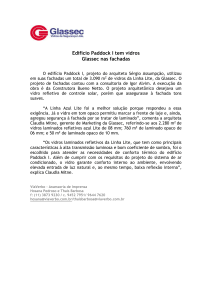
estudo, foi possı́vel atingir o objetivo desta monografia. Inicialmente pretendı́amos obter novos resultados acerca do movimento dos satélites artificiais, no entanto, decidimos por fazer uma nova abordagem dos resutaldos
já obtidos em [4] e [7] da bibliografia. Muitos outros resultados poderiam
ser acrescentados a este trabalho, porém é esperado que este assunto, motive
outros estudantes a pesquisar novos resultados.
49
Referências Bibliográficas
[1] H. Pollard, celestial Mechanics. The Mathematical Association of America. 1976.
[2] N. de Luca, Mecânica Celeste. EDUFPR, 1982.
[3] D.L. Maranhão, Dinâmica do Satélite Artificial. Maceió, EDUFAL, 1997.
[4] D. G. de Figueiredo & A. F. Neves, Equações Diferenciais Aplicadas. Rio
de Janeiro, Coleção Matemática, 1997.
[5] C. Vidal & H. Cabral, A aurora da mecânica celeste. Cubo Matemática
Educacional. Vol. 1., 1999.
[6] C. Vidal & H. Cabral, Introdução a Mecânica Celeste. 1999.
[7] E. G. de Santana, Movimento de queda de um satélite artificial devido ao
atrito com a atmosfera. www.sc.ehu.es/sbweb/fisica.
50