MOVIMENTO 3D: REFERENCIAL EM ROTAÇÃO
INTRODUÇÃO
ESTUDO DE CASO
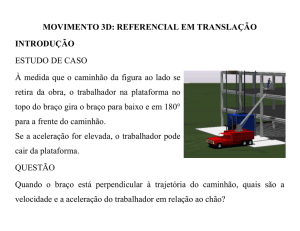
Um ventilador em funcionamento está oscilando em torno de um eixo vertical.
Uma mosca insuspeita voa em direção ao
ventilador e se choca com a ponta de uma das pás
quando a pá está na posição vertical. O que
acontecerá com a mosca?
QUESTÃO
No instante em que a mosca se choca com o
ventilador, quais são a velocidade e a aceleração
da ponta da pá na vertical?
DADOS
Os dados do presente caso, relativos ao
instante em que a mosca se choca com a pá
do ventilador, são os seguintes:
O ventilador está girando em torno do
eixo vertical com velocidade angular dada
por Ωf = 0,296 rad/s e aceleração angular
2
dada por dΩf/dt = 0,0419 rad/s ;
As pás do ventilador giram à velocidade
angular constante ωb = 2π rad/s;
O ventilador tem as dimensões mostradas na figura ao lado e está inclinado
de 15° acima da horizontal.
ABORDAGEM
Considerar
um
sistema
móvel
de
coordenadas, localizado no centro das
pás, sistema esse que gira com o
ventilador;
Usar as equações de movimento em três
dimensões
para
um
sistema
de
coordenadas em translação e rotação;
Considerar apenas o instante de tempo em
que a mosca se choca com o ventilador.
TEORIA
SISTEMA DE COORDENADAS TRIDIMENSIONAL EM ROTAÇÃO
Anteriormente, o movimento geral para um sistema de coordenadas
tridimensional xyz em translação foi examinado. A forma mais geral de
analisar o movimento tridimensional requer o uso de um sistema de
coordenadas xyz que translade e gire em relação à um sistema fixo XYZ.
Esse método é útil para determinar os
movimentos de dois pontos em partes
separadas de um mecanismo em estudo, ou
para determinar o movimento relativo de
duas ou mais partículas quando uma delas,
ou ambas, estão se movendo.
SISTEMA DE COORD. TRIDIMENSIONAL EM ROTAÇÃO (cont.)
Como se vê abaixo, seja um corpo rígido que translada e gira em relação a um
referencial fixo XYZ, com velocidade angular Ω e aceleração angular dΩ/dt.
Vetores de posição rA e rB especificam, em relação a XYZ, a localização do
ponto A, que está fixo no corpo rígido, e do ponto B, que pode não estar fixo
no corpo rígido e, portanto, pode se mover em relação a A.
SISTEMA DE COORD. TRIDIMENSIONAL EM ROTAÇÃO (cont.)
A origem do referencial móvel xyz é colocada em A, sendo que esse
referencial translada e gira com o corpo rígido. A posição de B em relação a A
é dada pelo vetor de posição relativa rB/A.
DESCRIÇÃO DO MOVIMENTO – POSIÇÃO
Pela equação de posição relativa, os pontos B e A estão relacionados por
rB rA rB/A
(1)
em que rB/A , no sistema móvel xyz, é
rB/A = xi + yj + zk (2)
uma vez que A está na origem desse sistema coordenado local.
DESCRIÇÃO DO MOVIMENTO – VELOCIDADE
A velocidade de B no sistema XYZ pode ser determinada pela derivada
temporal da equação de posição exposta anteriormente, de modo que
rB rA rB/A v B v A rB/A (3)
A derivada rB/A pode ser encontrada pela aplicação da equação que determina
a derivada de um vetor num sistema móvel, em relação a um sistema fixo
(vide unidade anterior). Dessa forma, tem-se
rB/A rB/A xyz Ω rB/A v B/A xyz Ω rB/A (4)
Substituindo essa equação na anterior, resulta que
v B v A Ω rB/A v B/A xyz
(5)
O termo v B/A xyz é a velocidade relativa de B em relação a A no sistema xyz.
DESCRIÇÃO DO MOVIMENTO – ACELERAÇÃO
A aceleração de B no sistema XYZ pode ser determinada pela derivada
temporal da equação de velocidade anterior, de modo que
r Ω r v
B/A v B/A (6)
v B v A Ω
B/A
B/A
B/A a B aA Ω rB/A Ω r
O termo v B/A tem dois componentes, pois sua condição é idêntica à do termo
rB/A acima. Tem-se, então, que
v B/A v B/A xyz Ω v B/A xyz (7)
Como já se sabe, da Eq. (4), que rB/A v B/A xyz Ω rB/A , decorre, das Eqs.
(4) e (7) em (6), que
r Ω Ω r 2Ω v a
aB aA Ω
B/A
B/A
B/A xyz
B/A xyz
(8)
DESCRIÇÃO DO MOVIMENTO – ACELERAÇÃO (cont.)
É interessante, embora não seja surpreendente, que as equações da velocidade
e da aceleração para referenciais tridimensionais em rotação, a saber,
v B v A Ω rB/A v B/A xyz
(5)
r Ω Ω r 2Ω v a
aB aA Ω
B/A
B/A
B/A xyz
B/A xyz
(8)
sejam as mesmas que aquelas equações para o movimento plano, quando
escritas em forma vetorial.
deve ser tratado com cuidado, pois ele agora não tem
Contudo, o termo Ω
uma direção constante, como ocorria no movimento plano. Deve, portanto, ser
determinado a partir da expressão (vide unidade anterior, Eq. (6))
dA dt dA dt xyz Ω A
SOLUÇÃO DO ESTUDO DE CASO
De saída, desenha-se o diagrama
cinemático no instante de interesse.
Como se vê ao lado, o referencial fixo
XYZ é colocado no centro da carcaça
do motor do ventilador, no ponto em
torno do qual o ventilador gira, sendo
que o eixo X fica paralelo ao chão.
Já a origem do referencial móvel xyz
(ponto A) fica no centro das pás do ventilador, com o eixo x perpendicular ao
plano de rotação das pás. Esse sistema gira com o ventilador, mas não com as
pás. No instante analisado, os eixos X e x são coplanares.
SOLUÇÃO DO ESTUDO DE CASO – DADOS
A velocidade e a aceleração
angulares do ventilador são
Ωf 0,296K rad / s
0,0419K rad / s2
Ω
f
Já a velocidade e a aceleração
angulares das pás são
ωb 2i rad / s (constante)
b α b 0 rad / s2
ω
A posição de B em relação a A é dada por
rB/A 0,30k m .
SOLUÇÃO DO ESTUDO DE CASO – VELOCIDADE
A velocidade de B pode ser separada em seus três termos componentes, pois
v B v A Ω rB/A v B/A xyz
1
2
3
Recomenda-se que cada termo seja tratado separadamente. Assim sendo,
Termo 1) O ponto A sofre rotação em torno de um ponto fixo, portanto
v A Ωf rA 0,296K 0,2cos15I 0,2sen15K 0,0572 J m/s
Termo 2) Tem-se que
Ω rB/A 0,296K 0,30k 0,296 (0,30) sen15J 0,0230J m/s
posto que K k sen15J .
SOLUÇÃO DO ESTUDO DE CASO – VELOCIDADE (cont.)
Termo 3) Dentro do sistema xyz, o
ponto B sobre rotação em torno de
um ponto fixo, de modo que
v B/A xyz ωb rB/A 2i 0,30k
1,885j 1,885J
Somando as contribuições de todos
os termos acima, resulta que
v B 1,851J m/s .
SOLUÇÃO DO ESTUDO DE CASO – ACELERAÇÃO
Pela equação da aceleração, a aceleração do ponto B é
r Ω Ω r 2Ω v a
a B aA Ω
B/A
B/A
B/A xyz
B/A xyz
1
2
3
4
5
De novo, recomenda-se que cada termo seja tratado separadamente.
Termo 1) O ponto A sobre rotação em torno de um ponto fixo, portanto
r Ω Ω r
aA Ω
f
A
f
f
A
a A 0,0419K 0,2cos15I 0,2sen15K
0,296K 0,296K 0,2cos15I 0,2sen15K
a A 0,0169I 0,0081J
SOLUÇÃO DO ESTUDO DE CASO – ACELERAÇÃO (cont.)
Termo 2) Tem-se aqui que
r
Ω
f
B/A 0,0419K 0,30k 0,0419 (0,30) sen15J 0,0033J
pois K k sen15J .
Termo 3) Nesse caso, também em vista do observado acima,
Ωf Ωf rB/A 0,296K 0,296K 0,30k 0,296K 0,0230J
0,0068I
Termo 4) Para esse termo, decorre que
2Ωf v B/A xyz 2(0,296K ) ( 1,885J ) 1,1159I
tendo v B/A xyz sido obtida no termo 3 da equação de velocidade.
SOLUÇÃO DO ESTUDO DE CASO – ACELERAÇÃO (cont.)
Termo 5) Por fim, tem-se que, dentro do
sistema xyz, o ponto B sofre movimento
em torno de um ponto fixo. Dessa forma,
a B/A xyz α b rB/A ωb ωb rB/A
0 2 i 2i 0,30k
11,8435k
Como k sen15I cos15K ,
a B/A xyz 11,8435 sen15I cos15K 3,0653I 11,4399K
Somando todos os termos acima, resulta que
a B 4,1711I 0,0048J 11,4399K m/s2 .
Fonte:
eCourses Dynamics – Multimedia Engineering Dynamics, K. Grammoll,
https://ecourses.ou.edu/cgi-bin/ebook.cgi?doc=&topic=dy&chap_sec=09.0,
acessado em 21/11/2016.