UNIVERSIDADE DO ESTADO DE SANTA CATARINA ‐ UDESC CURSO DE ENGENHARIA ELÉTRICA DISCIPLINA: INTRODUÇÃO AOS SISTEMAS DE CONTROLE PROFESSOR: ANTONIO SILVEIRA (MATERIAL CEDIDO PELA PROFA. MARIANA SANTOS MATOS CAVALCA) Aula 07: Simulação de sistemas não-lineares e linearizados utilizando o Simulink.
Objetivos: Avaliar e comparar os efeitos das não linearidades para um caso de estudo referente
a um circuito não linear utilizando a ferramenta Simulink. Os modelos matemáticos serão
representados no domínio da frequência e domínio do tempo.
Introdução
Sistemas dinâmicos lineares são aqueles representados por equações diferenciais (ou a
diferenças) lineares. O termo linear refere-se à aplicabilidade do Princípio da Superposição e
Homogeneidade.
O principio da superposição estabelece que se um sistema excitado por um sinal de
entrada u1(t) produz a saída y1(t) e se excitado com outro sinal de entrada u2(t) produz a saída
y2(t), então, o sinal de entrada u1(t) + u2(t) produzirá a saída y1(t) + y2(t).
O termo “homogeneidade” estabelece que se o sinal de entrada u1(t) produz como saída
y1(t), então o sinal de entrada Au1(t) produzirá a saída Ay1(t).
A análise e o projeto de sistemas lineares são extremamente facilitados devido à
existência de soluções analíticas para equações diferenciais (ou a diferenças) lineares.
Entretanto, sistemas reais são em geral não lineares, com comportamento dinâmico complexo se
comparado com os sistemas lineares. Sistemas não lineares são descritos por equações
diferenciais (ou a diferenças) não lineares e não satisfazem o Princípio da Superposição nem
Homogeneidade. Quase sempre tais equações não possuem soluções analíticas e frequentemente
é possível obter apenas estimativas ou soluções aproximadas das verdadeiras soluções.
Os procedimentos para determinar as soluções de problemas envolvendo sistemas não
lineares, em geral, são complexos. Devido a esta dificuldade matemática inerente a sistemas não
lineares, normalmente é necessário introduzir sistemas lineares equivalentes no lugar dos não
lineares. Estes sistemas lineares equivalentes somente são válidos dentro de uma faixa limitada
de operação. Uma vez que um sistema não linear é aproximado por um modelo matemático
linear, várias ferramentas lineares podem ser aplicadas para fins de análise e projeto.
Na prática, muitos sistemas eletromecânicos, hidráulicos, pneumáticos e outros
envolvem relações não lineares entre as variáveis. Por exemplo, a saída de um componente pode
saturar para sinais de entrada de grande amplitude ou a presença de uma zona morta que pouco
afeta o sistema quando sujeito a entradas de baixa amplitude.
Nesta aula, para exemplificar uma forma de simulação e análise desses sistemas, será
utilizado um circuito não linear.
1 Caso de estudo
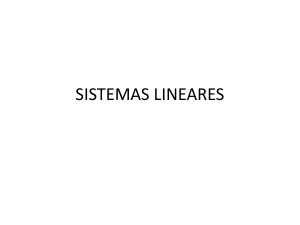
A Figura 1 apresenta o circuito não linear que será utilizado para análise.
Figura 1. Sistema para análise
A entrada do sistema é a fonte 2+ i(t) (onde i(t) é um sinal pequeno com pouca
variação) e a saída é a tensão v(t). Ainda, tal circuito contém um resistor não linear cuja relação
.
tensão-corrente é definida por
Aplicando a Lei de Kirchhoff para tensões tem-se o modelo não linear:
2 O ponto de operação da tensão de saída é de vo=ln(2). Considerando apenas o elemento
, é possível aplicar a aproximação absoluta por série de Taylor
não linear
(desprezando os termos de ordem superior):
2
ln 2
2ln 2
2
Substituindo no modelo não-linear, temos:
2 2
2
2ln 2
2
2 2 ln 2
Tal aproximação não obedece ao Princípio da Superposição e da Homogeneidade (faça
o teste!). Assim, vamos agora calcular a aproximação relativa (considere apenas as variações ao
redor do ponto de operação) do termo não linear:
∆
∆
∆
∆
∆
2∆
2 Considerando agora apenas variações ao redor do ponto de operação, o modelo não
linear pode ser escrito na forma:
∆
∆
Portanto:
∆
2∆
∆
2∆
Essa última aproximação, a relativa, é linear, pois obedece ao Princípio da Superposição e da
Homogeneidade.
É possível obter o modelo no domínio da frequência (Função de transferência) a partir
do modelo linear, conforme segue:
1
∆
2
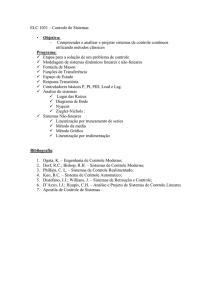
No Simulink:
log(2)
v0
i(t)
dv(t)/dt
v(t)
1/s
Integrator
2
Constant
e^v(t)
e
u
Math
Function
dv(t)/dt
Scope
v(t)
1/s
Integrator1
2*log(2)
Constant1
2
Gain
ddeltav(t)/dt
1/s
deltav(t)
Integrator2
v(t)
2
Gain1
1
s+2
Transfer Fcn
Figura 2. Modelos no Simulink
3 Note que o valor do ponto de operação é somado às saídas dos modelos absolutos e relativos
para que estes sejam considerados em condições semelhantes de operação.
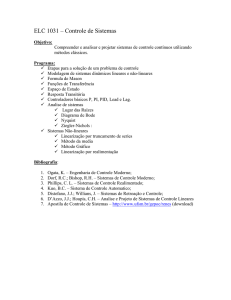
Considerando como corrente de entrada um degrau de valor 0.01, tem-se resposta
similar para todos os casos conforme mostra a Figura 3.
Figura 3. Resposta a uma entrada do tipo degrau.
4 Nome:
Turma:
12Data:
Nota:
Seja o sistema apresentado na Figura 4, com entrada f(t) e saída x(t).
Figura 4. Sistema para análise do exercício.
O sistema possui uma mola não linear cuja função está dada por fm(t)=0,5x2m(t). A força aplicada
é f(t)=6+δf(t), onde δf(t) é uma pequena força em torno do valor constante de 6N.
a)
Determinar o modelo não linear.
b)
Determinar o modelo linear em torno do ponto de operação.
5 c)
Determinar a função de transferência a partir do modelo linear.
d)
Determinar o modelo no espaço de estados a partir do modelo linear.
e)
Simular os modelos obtidos no Matlab/Simulink para δf(t)=0,1. Esboce o diagrama do
Simulink e as respostas para cada um dos modelos.
f)
Comentar os resultados obtidos. As respostas foram semelhantes?
6