APONTAMENTOS DE VIBRAÇÕES
MECÂNICAS
Análise de Estruturas 2
Mestrado Integrado em Engenharia Civil
&
Mestrado em Engenharia Civil (Reabilitação de Edifícios)
Ano lectivo 2009/2010
Estes apontamentos foram retirados dos textos de apoio da disciplina de Mecânica
Aplicada II, do antigo curso de Licenciatura em Engenharia Civil, da autoria do
Prof. Corneliu Cismaşiu.
i
ii
Conteúdo
1 Vibrações mecânicas
1.1 Vibrações não amortecidas . . . . . . . . . . . . . . . .
1.1.1 Vibrações livres. Movimento harmónico simples
1.1.2 Vibrações forçadas . . . . . . . . . . . . . . . .
1.2 Vibrações amortecidas . . . . . . . . . . . . . . . . . .
1.2.1 Vibrações livres . . . . . . . . . . . . . . . . . .
1.2.2 Vibrações forçadas . . . . . . . . . . . . . . . .
1.3 Exercícios propostos . . . . . . . . . . . . . . . . . . .
iii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
2
2
21
30
31
36
44
Capítulo 1
Vibrações mecânicas
Uma vibração mecânica é o movimento de uma partícula ou de um corpo que
oscila em torno de uma posição de equilíbrio.
O estudo que se segue será limitado a sistemas com apenas um grau de liberdade.
Uma vibração mecânica surge geralmente quando um sistema é deslocado da sua
posição de equilíbrio estável. Em geral, quando o sistema tende voltar sob a acção de forças de restituição, ultrapassa esta posição. A repetição deste processo
é chamado movimento oscilatório. O intervalo de tempo necessário para o sistema completar um ciclo de movimento chama-se período de vibração. O número
de ciclos por unidade de tempo define a frequência, e o deslocamento máximo
do sistema medido a partir da sua posição de equilíbrio chama-se amplitude de
vibração.
Vibrações:
– livres: movimento mantido apenas por forças de restituição;
– forçadas: quando uma força periódica é aplicada ao sistema;
– não amortecidas: quando se pode desprezar o atrito - o movimento
continua indefinidamente;
– amortecidas: a amplitude decresce lentamente até que, passado um
certo tempo, o movimento cessa.
1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
1.1 Vibrações não amortecidas
1.1.1 Vibrações livres. Movimento harmónico simples
Considere-se uma partícula de massa m ligada a uma mola de constante de rigidez k.
(a)
(b)
mola
indeformada
equilíbrio
estático
δest
(c)
Fe
Fe
x
P
P
Quando a partícula se encontra na posição de equilíbrio estático (b),
X
Fx = 0 ⇒ P − Fe = 0
Mas, nesta posição, a força elástica é Fe = kδest , onde δest representa a deformação estática da mola, resultando
P = kδest
Numa posição arbitrária (c),
X
Fx = max
P − Fe = mẍ
⇒
mẍ = P − k (δest + x) = P − kδest −kx
| {z }
0
mẍ + kx = 0
ou, dividindo pela massa,
ẍ + ω 2 x = 0
com ω 2 ≡
k
m
(1.1)
O movimento definido pela equação (1.1) e um movimento harmónico simples. A
solução desta equação diferencial homogénea é de tipo eλt ,
x = eλt
p.2 – Capítulo 1
ẋ = λeλt
ẍ = λ2 eλt
1.1. VIBRAÇÕES NÃO AMORTECIDAS
λ2 + ω 2 eλt = 0
∀t
λ2 + ω 2 = 0
⇒
. . . eq. característica
Como solução da equação característica é
λ1,2 = ± iω
a solução da equação diferencial é uma combinação linear de funções de tipo eλt ,
x(t) = C1 eλ1 t + C2 eλ2 t = C1 e−iωt + C2 eiωt
onde C1 e C2 são constantes arbitrárias que podem ser obtidas da imposição das
condições iniciais do movimento (deslocamento e velocidade inicial).
Usando a bem conhecida fórmula de Euler, que liga o número irracional e das
funções trigonométricas,
e±ix = cos x ± i sin x
a solução da equação diferencial pode ser escrita,
x(t) = C1 (cos ωt − i sin ωt) + C2 (cos ωt + i sin ωt)
x(t) = (C1 + C2 ) cos ωt + i(C2 − C1 ) sin ωt = A cos ωt + B sin ωt
onde A e B são constantes arbitrárias que podem ser obtidas da imposição das
condições iniciais.
A forma acima é equivalente a
x(t) = Xm sin(ωt − φ)
onde Xm e φ são a amplitude e o desfazamento do movimento oscilatório, grandezas estas que devem ser determinadas das condições iniciais.
Para mostrar que as duas formas são equivalentes, usa-se a fórmula trigonométrica,
sin(a − b) = sin a cos b − sin b cos a
Então,
A cos ωt + B sin ωt = Xm sin(ωt − φ) = Xm (sin ωt cos φ − sin φ cos ωt)
A cos ωt + B sin ωt = −Xm sin φ cos ωt + Xm cos φ sin ωt
A = −Xm sin φ
B = Xm cos φ
⇒
Xm =
√
⇓
A2
+
B2
φ=
∀t
, se B < 0
π + arctan −A
B
−A
arctan B
, se B ≥ 0
p.3 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
Resumindo, o movimento harmónico simples é definido pela equação diferencial
ẍ + ω 2 x = 0
cuja solução geral pode ter uma das seguintes formas,
x(t) = C1 e−iωt + C2 eiωt
x(t) = A cos ωt + B sin ωt
x(t) = Xm sin(ωt − φ)
Nestas equações,
r
k
rad/s
m
denomina-se por frequência (circular) do movimento oscilatório. O tempo necessário para a partícula descrever um ciclo completo chama-se período,
ω=
T =
2π
ω
s
enquanto o número de ciclos descritos na unidade de tempo, denomina-se por
frequência natural,
ω
1
Hz
ν= =
T
2π
T
XM
t
φ
-XM
A velocidade e a aceleração da partícula resulta pela definição,
x(t) = Xm sin(ωt − φ)
ẋ(t) = ωXm cos(ωt − φ)
xmáx = Xm
ẋmáx = ωXm
ẍ(t) = −ω 2 Xm sin(ωt − φ) = −ω 2 x(t)
ẍmáx = ω 2Xm
Qualquer seja a forma sob a qual é apresentada a solução da equação diferencial,
esta envolve duas constantes a determinar pela imposição das condições iniciais,
ou seja, o deslocamento e a velocidade inicial da partícula.
p.4 – Capítulo 1
1.1. VIBRAÇÕES NÃO AMORTECIDAS
Admitindo a solução e as condições iniciais,
x(t) = Xm sin(ωt − φ)
resulta,
x(0) = x0
ẋ(0) = v0
r
Xm =
x20 +
x(0) = x0
⇒
e ẋ(0) = v0
−Xm sin φ = x0
ωXm cos φ = v0
v0 2
ω
φ = arctan
−ω x0
v0
Pêndulo simples (solução aproximada)
Seja um pêndulo simples formado por uma esfera de
massa m ligada a uma corda de comprimento l, que
pode oscilar num plano vertical. Pede-se para determinar o período das pequenas oscilações (ângulo inferior à 10◦ ).
X
Ft = mat
−mg sin θ = mlθ̈
⇒
θ̈ +
l
θ
T~
m
P~
g
sin θ = 0
l
Para pequenas oscilações,
sin θ ≃ θ
θ(t) = θm sin(ωt − φ)
⇒
θ̈ +
com ω =
r
g
θ=0
l
g
l
T =
2π
= 2π
ω
s
l
g
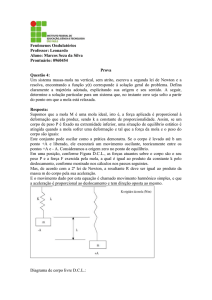
Exercício (Beer 19.15)
Um cursor com 5 kg repousa sobre uma mola, não estando ligado a ela. Observa-se que, se o cursor for empurrado para baixo 180 mm ou mais, perde o
contacto com a mola depois de libertado. Determine (a) a constante de rigidez da
mola e (b) a posição, a velocidade e a aceleração do cursor, 0.16 s após ter sido
empurrado para baixo 180 mm e , depois, libertado.
mola indeformada
m
k
x0
Fe
x
equilíbrio estático
mg
p.5 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
Numa posição qualquer x,
mẍ = mg − Fe = mg − k(x + x0 ) = −kx + (mg − kx0 )
mas tomando em conta que na posição de equilíbrio estático
mg − kx0 = 0
resulta
mẍ + kx = 0
⇒
2
ẍ + ω x = 0 ω ≡
A solução da equação diferencial pose ser escrita
r
k
m
x(t) = C1 sin ωt + C2 cos ωt
onde C1 e C2 são constantes arbitrárias a determinar aplicando as condições iniciais:
x(0) = Xm ⇒ C2 = Xm
⇒ x(t) = Xm cos ωt
ẋ(0) = 0 ⇒ C1 = 0
A velocidade a a aceleração serão dadas por,
ẍ(t) = −ω 2 Xm cos ωt
ẋ(t) = −ωXm sin ωt
(a) Sabe-se que, quando o cursor perde o contacto com a mola a sua velocidade
é nula e a sua aceleração é a aceleração gravitacional,
ẋ(t1 ) = 0
⇒
sin ωt = 0
⇒
ωt1 = π
⇒ −ω 2 Xm cos π = ω 2 Xm = g
g
k
mg
ω2 =
=
⇒ k=
Xm
m
Xm
5 × 9.81
k=
= 272.5 N/m
0.18
ẍ(t1 ) = g
(b)
ω=
r
g
=
Xm
r
9.81
≃ 7.38 rad/s
0.18
x(0.16) = 0.18 × cos(7.38 × 0.16) ≃ 0.068 m
ẋ(0.16) = −7.38 × 0.18 × sin(7.38 × 0.16) ≃ −1.23 m/s
ẍ(0.16) = −7.382 × 0.18 × cos(7.38 × 0.16) ≃ −3.73 m/s2
p.6 – Capítulo 1
1.1. VIBRAÇÕES NÃO AMORTECIDAS
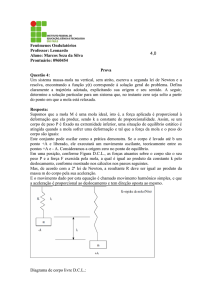
Exercício (Beer 19.17)
Um bloco com 35 kg está apoiado pelo conjunto de molas
mostrado na figura. O bloco é deslocado verticalmente para
baixo e em seguida libertado. Sabendo que a amplitude do
movimento resultante é de 45 mm, determine (a) o período e
frequência do movimento e (b) a velocidade e a aceleração
máxima do bloco. Considere k1 = 16 kN/m, k2 = k3 =
8 kN/m.
k1
m
k2
k3
• Determinar a constante de rigidez equivalente
posição de equilíbrio (molas indeformadas)
Fe
F1
δ
F2
P
F3
P
P = F1 + F2 + F3 = Fe
⇒
(k1 + k2 + k3 ) δ = ke δ
ke = k1 + k2 + k3 = 16 + 8 + 8 = 32 kN/m
ou seja, o movimento do sistema dado é equivalente ao movimento oscilatório de um bloco de massa m = 35 kg ligado a uma mola de rigidez
ke = 32 kN/m.
(a)
ω=
T =
r
ke
=
m
r
32000
≃ 30.237 rad/s
35
2π
≃ 0.208 s
ω
ν=
(b)
x(t) = Xm sin(ωt − φ)
⇒
1
≃ 4.81 Hz
T
ẋmáx = ωXm
ẍmáx = ω 2Xm
ẋmáx = 30.237 × 0.045 ≃ 1.36 m/s
ẍmáx = 30.2372 × 0.045 ≃ 41.14 m/s2
p.7 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
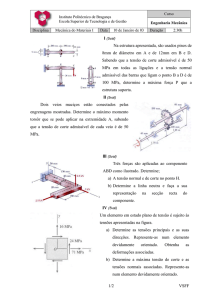
Exercício (Beer 19.28)
Sabe-se da mecânica dos materiais que quando uma carga estática P é aplicada
na extremidade B de uma viga encastrada com secção transversal uniforme, provoca uma flecha δB = P L3 /(3EI), em que L é o comprimento da viga, E o
módulo de elasticidade do material e I o momento de inércia da secção transversal. Sabendo que L = 3.05 m, E = 200 GPa e I = 4.84 × 10−6 m4 , determine
(a) a constante de rigidez equivalente da viga e (b) a frequência das vibrações
verticais de um bloco com 2313 N ligado à extremidade B da mesma viga.
(Nota: 1 Pa = 1 N/m2 , 1 GPa = 109 Pa)
P
P
A
δB
B
L, EI
ke
(a)
P = Fe = kδB
ke =
⇒
ke =
3EI
P 3EI
= 3
3
PL
L
3 × 200 × 109 × 4.84 × 10−6
≃ 102.352 kN/m
3.053
(b)
1
ω
1
ν= =
=
T
2π
2π
1
ν=
2π
r
r
k
1
=
m
2π
r
kg
P
102352 × 9.81
≃ 3.316 Hz
2313
Vibrações de corpos rígidos
No caso dos corpos rígidos, a equação diferencial do movimento oscilatório resulta directo das equações de equilíbrio dinâmico.
Exercício (Beer 19.55)
p.8 – Capítulo 1
1.1. VIBRAÇÕES NÃO AMORTECIDAS
A
A barra uniforme AB com 8 kg está articulada em
C e ligada em A a uma mola de constante de rigidez
k = 500 N/m. Se for imposto à extremidade A um pequeno deslocamento e se depois for libertada, determine (a) a frequência das pequenas oscilações e (b) o
menor valor da constante de rigidez para o qual ocorrerão oscilações. Considere L = 250 mm e d = 40 mm.
L
k
G
d
C
B
Fe
A
(a)
θ
X
G
mg
X
C
Cn
Ct
MG
Ft
...
...
IG θ̈ = −Fe (L/2) cos θ − Ct d
mat = Ct + mg sin θ − Fe cos θ
at = θ̈ d
sin θ ≃ θ
cos θ ≃ 1
Ct = mθ̈d − mgθ + Fe
IG θ̈ = −Fe L/2 − md2 θ̈ + mgdθ − Fe d
Mas,
Fe = k
e
L
L
+ d sin θ ≃ k
+d θ
2
2
IG =
resultando,
1
mL2
12
k(L/2 + d)2 − mgd
θ=0
mL2 /12 + md2
s
k(L/2 + d)2 − mgd
ω=
mL2 /12 + md2
θ̈ +
ω=
s
500 × (0.25/2 + 0.04)2 − 8 × 9.81 × 0.04
≃ 13.87 rad/s
8 × 0.252/12 + 8 × 0.042
f=
ω
1
=
≃ 2.21 Hz
T
2π
(b) Não ocorrem oscilações quando o T → ∞ ou ω → 0, ou ainda se a frequência é um número imaginário,
ω2 =
k(L/2 + d)2 − mgd
>0
mL2 /12 + md2
⇒
k>
mgd
(L/2 + d)2
p.9 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
kmín >
8 × 9.81 × 0.04
≃ 115.3 N/m
(0.25/2 + 0.04)2
Exercício
Determine o período das pequenas oscilações da placa rectangular homogénea
representada.
X
~
R
O
G
θ
2b
G
P~
2b
5
−P b sin θ = mb2 θ̈ ⇒
3
Mas, como θ << 1, sin θ ≃ θ, resultando,
3g
θ=0
θ̈ +
5b
⇒
3g
ω2 =
5b
MO = IO θ̈
IO = IG + m OG2
1 IO =
(2b)2 + (2b)2 + mb2
12
5
IO = mb2
3
5 2
−mgb sin θ = mb θ̈
3
⇒
2π
T =
= 2π
ω
s
5b
3g
Aplicação do princípio da conservação da energia
O princípio da conservação da energia proporciona um meio conveniente para
determinar o período de vibração de um sistema com um só grau de liberdade,
desde que se admita o movimento harmónico simples.
Escolhem-se duas posições particulares do sistema:
1a Quando o deslocamento do sistema é máximo. Nesta posição a energia cinética do sistema T1 é nula. Escolhendo o nível zero para a energia potencial
a posição de equilíbrio estático, a energia potencial V1 pode ser expressa em
função da amplitude Xm ou θm ;
2a Quando o sistema passa pela sua posição de equilíbrio. A energia potencial
do sistema V2 é nula e a energia cinética T2 pode ser expressa em função da
velocidade máxima Ẋm ou da velocidade angular máxima θ̇m .
O período das pequenas oscilações resulta escrevendo a conservação da energia,
T1 + V1 = T2 + V2
p.10 – Capítulo 1
1.1. VIBRAÇÕES NÃO AMORTECIDAS
e tomando em conta que, num movimento harmónico simples,
Ẋm = ω Xm
θ̇m = ω θm
ou
Exercício
Utilizando o princípio da conservação da energia, determine o período das pequenas oscilações da placa rectangular homogénea considerada no exercício anterior.
θ̇ = 0
θ=0
O
O
2b
θM
θ̇M
G
G
P~
nível de referência
V =0
P~
2b
• Posição do deslocamento máximo
T1 = 0
V1 = P b(1 − cos θm )
2
θm
θm
θ2
1
2
2
1 − cos θm = 2 sin
≃2
= m ⇒ V1 = P bθm
2
2
2
2
• Posição de equilíbrio
1
2
IO θ̇m
V2 = 0
2
5
1 (2b)2 + (2b)2 + mb2 = mb2
IO = IG + mOG2 =
12
3
15
2
T2 =
mb2 θ̇m
V2 = 0
23
T2 =
• Conservação da energia
T1 + V1 = T2 + V2
⇒
1
15
2
2
P bθm
=
mb2 θ̇m
2
23
e tomando em conta que θ̇m = ωθm (movimento harmónico),
5
2 2
2
ω
mgbθm
= mb2 θm
3
⇒
3g
ω2 =
5b
⇒
2π
T =
= 2π
ω
s
5b
3g
p.11 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
Exercício (Beer 19.80)
Uma barra AB com 8 kg e comprimento
L = 600 mm está ligada a dois cursores com
massa desprezável. O cursor A está por sua
vez ligado a uma mola de constante de rigidez
k = 1.2 kN/m e pode deslizar numa barra vertical, enquanto o cursor B pode deslizar livremente numa barra horizontal.
A
L
k
θ
B
Sabendo que o sistema está em equilíbrio e que θ = 40◦ , determine o período
de vibração se for imposto um pequeno deslocamento ao cursor B e depois libertado.
• Determinação da deformação estática da mola.
Na posição de equilíbrio,
X
Fh = 0 ⇒ NA = 0
X
mg
NA
A
Fe
mg
B
MB = 0
NB
⇓
L
cos θ − Fe L cos θ = 0
2
• Conservação da energia
δest =
⇒
mg
2k
y
y
A
dy
A
G
G
dȳ
y
ȳ
θ
dθ
B
x
B
x̄
dx
x
(A)
x = L cos θ
dx = −L sin θ dθ
p.12 – Capítulo 1
(B)
y = L sin θ
dy = L cos θ dθ
x
1.1. VIBRAÇÕES NÃO AMORTECIDAS
Tomando em conta que θ - o ângulo da posição de equilíbrio estático - é
independente de tempo,
dẋ = −L sin θ dθ̇
dẏ = L cos θ dθ̇
Como x̄ = x/2 e ȳ = y/2,
dx̄˙ = −
L
sin θ dθ̇
2
dȳ˙ =
L
cos θ dθ̇
2
(A) - posição de equilíbrio (deformação da mola δest , velocidade máxima)
1 2
+ mg ȳ
V1 = kδest
2
1 1
T1 = IG (dθ̇)2m + m (dx̄˙ )2m + (dȳ˙ )2m
2
2
"
2 2 #
1 mL2
1
L
L
T1 =
(dθ̇)2m + m
sin θ +
cos θ
(dθ̇)2m
2
12
2
2
2
1
1
1 1
mL2 (dθ̇)2m = mL2 (dθ̇)2m
+
T1 =
2 12 4
6
(B) - posição de deslocamento máximo (velocidade zero)
1
V2 = k(δest − dym )2 + mg(ȳ + dȳm )
2
T2 = 0
T1 + V1 = T2 + V2
⇒
1 2
1
1
mL2 (dθ̇)2m + kδest
+ mg ȳ = 0 + k(δest − dym )2 + mg(ȳ + dȳm )
6
2
2
k
1
2
mL2 (dθ̇)2m = (2δest dym + dym
) + mgdȳm
6
2
e substituindo a expressão do δest ,
1
k mg
dym
k 2
2
−2
mL2 (dθ̇)2m =
dym + dym
+ mg
= dym
6
2
2k
2
2
1
mL2 (dθ̇)2m = kL2 cos2 θ(dθ)2m
3
p.13 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
Tomando em conta que o movimento é harmónico,
dθ = (dθ)m sin(ωt − φ)
⇒
(dθ̇)m = ω(dθ)m
resultando
1
mL2 ω 2 (dθ)2m = kL2 cos2 θ(dθ)2m
3
ω=
r
3k
cos θ =
m
ω2 =
⇒
3k
cos2 θ
m
r
3 × 1200
× cos 40◦ ≃ 16.25 rad/s
8
2π
T =
≃ 0.387 s
ω
Exercício (Beer 19.85)
Uma barra AB com 800 g está rebitada a um
disco com 1.2 kg. Uma mola de constante de
rigidez k = 1.2 kN/m está ligada ao centro do
disco em A e à parede em C. Sabendo que o
disco rola sem escorregar, determine o período
das pequenas oscilações do sistema. Considere
r = 250 mm e L = 600 mm.
rθ̇M
1111111
0000000
0000000
1111111
0000000
1111111
0000000
1111111
0000000
1111111
r
L
A
k
C
B
r sin θM ≃ rθM
A
A
1111111
0000000
θ̇M (L/2 − r)
G
111111
000000
G
θ̇M
θM
B
B
(A)
(B)
(A) - posição de equilíbrio estático (mola indeformada, velocidade máxima)
Tomando em conta que o ponto de contacto entre o disco e a superfície
horizontal é o centro instantâneo de rotação do sistema, a velocidade do
ponto A é
vA = r θ̇m
p.14 – Capítulo 1
1.1. VIBRAÇÕES NÃO AMORTECIDAS
A velocidade do ponto G resulta,
~vG = ~vA + ~vG/A
T1 =
⇒
vG = r θ̇m +
L
θ̇m = θ̇m (L/2 − r)
2
2
2
2
2
mAB (L/2 − r)2 θ̇m
IA,disco θ̇m
mdisco r 2 θ̇m
IG,AB θ̇m
+
+
+
2
2
2
2
mAB L2
0.8 × 0.62
=
= 0.024 kgm2
12
12
mdisco r 2
1.2 × 0.252
=
=
= 0.0375 kgm2
2
2
IG,AB =
IA,disco
0.024 0.8 × (0.3 − 0.25)2 0.0375 1.2 × 0.252 2
θ̇m
+
+
+
T1 =
2
2
2
2
Escolhendo o nível zero para a energia potencial do sistema nesta posição,
temos então,
2
T1 = 0.06925 θ̇m
V1 = 0
(B) - posição de deslocamento máximo (velocidade nula)
A deformação da mola nesta posição é dada por,
∆ = r sin θm ≃ rθm
V2 =
1
L
k(rθm )2 + mAB g (1 − cos θm )
2
2
Mas como,
2
1 − cos θm = 2 sin
θm
2
≃2
θm
2
2
=
2
θm
2
2
2
1 2 2
L θm
mAB gL 2
kr
V2 = kr θm + mAB g
θm
=
+
2
2 2
2
4
1200 × 0.252 0.8 × 9.81 × 0.6 2
θm
+
V2 =
2
4
Tomando em conta que nesta posição a velocidade do sistema é nula,
T2 = 0
2
V2 = 38.6772 θm
p.15 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
Aplicando agora o princípio da conservação da energia entre as duas posições, e
tomando em conta que o movimento é harmónico (θ̇m = ωθm ),
T1 + V1 = T2 + V2
2
0.06925 ω 2θm
=
2
38.6772 θm
T =
2
2
0.06925θ̇m
= 38.6772θm
⇒
2
ω =
⇒
r
38.6772
≃ 23.64 rad/s
0.06925
2π
≃ 0.266 s
ω
Exercício
k
Determine a frequência das pequenas oscilações do disco homogéneo de massa m representado, assumindo que se encontra em
equilíbrio na posição mostrada e que não
escorrega na superfície horizontal.
A
a
k
O
1111
0000
0000
1111
r
B
(1)
(2)
θM
A
A
θ̇M
11111
00000
00000
11111
11111
00000
00000
11111
B
B
(1) - posição de equilíbrio (a velocidade é máxima)
Como o disco não escorrega na superfície horizontal, o ponto B é o C.I.R.
para o disco e o movimento é uma rotação não-baricêntrica.
T1 =
com
IB = IO + mr 2 =
1
2
IB θ̇m
2
1
3
mr 2 + mr 2 = mr 2
2
2
Escolhendo o nível zero para a energia potencial (gravítica e elástica) nesta
posição, resulta
3
2
T1 = mr 2 θ̇m
V1 = 0
4
p.16 – Capítulo 1
1.1. VIBRAÇÕES NÃO AMORTECIDAS
(2) - posição de deslocamento máximo (velocidade é nula)
V2 =
1
1
2
2
2
k(r + a)2 θm
+ k(r + a)2 θm
= k(r + a)2 θm
2
2
T2 = 0
Aplicando o princípio da conservação da energia entre as duas posições, e tomando em conta que o movimento é harmónico (θ̇m = ωθm ),
T1 + V1 = T2 + V2
ω=
⇒
r
3
2
2
mr 2 ω 2 θm
= k(r + a)2 θm
4
4k(r + a)2
rad/s
3mr 2
Nota: Para que o resultado acima seja correcto, não é necessário que as molas
sejam indeformadas na posição de equilíbrio estático. Apenas é necessário que o
sistema seja em equilíbrio nesta posição. Como neste caso as duas molas tem a
mesma constante de rigidez, para o sistema estar em equilíbrio a deformação nas
duas molas deve ser a mesma. Seja esta deformação inicial x0 (compressão ou
tracção nas duas molas).
A energia mecânica na posição de equilíbrio passa a ser,
3
1
1
3
3
2
2
2
E1 = mr 2 θ̇m
+ kx20 + kx20 = mr 2 θ̇m
+ kx20 = mr 2 ω 2θm
+ kx20
4
2
2
4
4
Na posição de deslocamento máximo,
1
1
2
E2 = k [x0 + (r + a)θm ]2 + k [x0 − (r + a)θm ]2 = kx20 + k(r + a)2 θm
2
2
E igualando a energia mecânica nas duas posições,
3 2 2 2
2
mr ω θm + kx20 = kx20 + k(r + a)2 θm
4
⇒
ω=
r
4k(r + a)2
3mr 2
Exercício
O cilindro de massa m e raio r rola sem escorregar numa superfície de raio R.
Determine a frequência das pequenas oscilações do sistema.
p.17 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
O1
O1
θ
A
O
φ
O
C
A
B
(1)
(2)
(1) - posição de equilíbrio estático (energia potencial zero, velocidade máxima)
V1 = 0
2
2
1
1
˙ θ)2 = 1 mr 2 φ̇ − θ̇ + 1 1 mr 2 φ̇ − θ̇
T1 = mvO2 + IO (φ −
2
2
2
22
2
3
T1 = mr 2 φ̇ − θ̇
4
Mas,
⌢
⌢
BC=AC
⇒
Rθ = rφ
⇒
φ=
R
θ
r
⇒
φ̇ =
R
θ̇
r
e como nesta posição θ̇ = θ̇m ,
2
3
3
R
2
2
2
= m(R − r)2 θ̇m
T1 = mr
− 1 θ̇m
4
r
4
(2) - posição de deslocamento máximo (energia potencial máxima, velocidade
nula)
T2 = 0
V2 = mg(R − r)(1 − cos θ)
Mas como,
2
θ
1 − cos θ ≃ 2 sin
2
2
θ2
1
θ
= mg(R − r)2 = mg(R − r)θ2
V2 ≃ mg(R − r)2 sin
2
4
2
e tomando em conta que nesta posição θ = θm ,
V2 =
p.18 – Capítulo 1
1
2
mg(R − r) θm
2
1.1. VIBRAÇÕES NÃO AMORTECIDAS
Aplicando o princípio da conservação da energia,
T1 + V1 = T2 + V2
⇒
1
3
2
2
m(R − r)2 θ̇m
= mg(R − r) θm
4
2
Como o movimento oscilatório é harmónico,
θ̇m = ωθm
resultando
3
2
2
m(R − r)2 ω 2 θm
= mg(R − r) θm
2
s
2g
2g
ω2 =
⇒ ω=
3 (R − r)
3 (R − r)
Nota: Método alternativo para o cálculo do T1
1 2
1
1 2
1 1 2 vO2
3
3
2
T1 = mvO + IO ω = mvO +
mr 2 = mvO2 = m(R − r)2 θ̇2
2
2
2
22
r
4
4
Exercício
Admitindo que não há escorregamento entre o fio
inextensível e o disco de massa M, determine a
frequência das pequenas vibrações do sistema representado.
θ̇M
A
G
M
m
θM
B ≡ C.I.R.
A
(1)
r
k
B
G
(2)
(1) - posição de equilíbrio estático (θ̇ = θ̇m )
1
V1 = k∆20
2
p.19 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
1
1
1
2
2
T1 = MvG
+ IG θ̇m
+ mvA2 =
2
2
2
3
M
T1 =
4
1
11
1
2
2
2
Mr 2 θ̇m
+
Mr 2 θ̇m
+ m4r 2 θ̇m
2
22
2
2
+ 2m r 2 θ̇m
(2) - posição de deslocamento máxima (θ = θm )
1
V2 = k(∆0 + xG )2 − mgxA − MgxG
2
1
V2 = k(∆0 + rθm )2 − (2m + M)grθm
2
T2 = 0
Escrevendo agora o princípio da conservação da energia,
T1 + V1 = T2 + V2
resulta,
1
3
1 2
2
k∆0 +
M + 2m r 2 θ̇m
= k(∆0 + rθm )2 − (2m + M)grθm
2
4
2
1
3
2
2
M + 2m r 2 θ̇m
= kr 2 θm
+ [k∆0 − (2m + M)g] rθm
4
2
Na expressão acima, ∆0 representa a deformação da mola na posição de equilíbrio
estático. Se nesta posição escreve-se somatório de momentos em B, resulta
X
MB = 0 ⇒ mg2r + Mgr − k∆0 r = 0 ⇒ k∆0 − (2m + M)g = 0
Com este resultado, do princípio da conservação da energia resulta,
1
3
2
2
M + 2m r 2 θ̇m
= kr 2 θm
4
2
e admitindo o movimento harmónico,
3
1 2
2
M + 2m ω 2 θm
= kθm
4
2
⇒
ω=
s
3
M
2
k
+ 4m
Nota: Para simplificar as contas no estudo das pequenas vibrações em torno da
posição de equilíbrio estático, pode-se sempre admitir que a força elástica e as
forças que a equilibram nesta nesta posição (pesos) anulam-se umas as outras.
p.20 – Capítulo 1
1.1. VIBRAÇÕES NÃO AMORTECIDAS
Então, estas forças podem ser deixadas fora das seguintes contas e na posição de
deslocamento máximo apenas terão de ser contabilizadas as restantes forças e o
suplemento da força elástica.
No problema considerado, isto significava,
2
V1 = 0
T1 = 43 M + 2m r 2 θ̇m
2
V2 = 12 kr 2 θm
T2 = 0
1.1.2 Vibrações forçadas
ω=
⇒
s
3
M
2
k
+ 4m
As vibrações forçadas ocorrem sempre que um sistema está sujeito a uma força
periódica, ou quando está elasticamente ligado a um apoio com movimento oscilatório.
Força periódica
Considere-se uma partícula de massa m ligada a uma mola de constante de rigidez k, sujeita a acção de uma força periódica
F = Fm sin ωf t
(a)
mola
indeformada
equilíbrio
estático
(b)
xest
(c)
Fe
Fe
x
P
F
X
Fx = mẍ
⇒
P
mẍ = mg − Fe + F = mg − k(xest + x) + F
Tomando em conta que na posição de equilíbrio estático mg = kxest e substituindo a expressão para a excitação harmónica,
mẍ + kx = Fm sin ωf t
Fm
sin ωf t
ẍ + ω x =
m
2
onde ω =
r
k
m
(1.2)
p.21 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
Uma equação diferencial que possui o membro direito diferente de zero, diz-se
não homogénea. A sua solução geral obtém-se pela adição da solução particular
da equação dada à solução geral da correspondente equação homogénea,
x = xp + x0
Solução particular Como o membro direito é uma função harmónica, a solução
particular também é uma função harmónica. Seja a solução particular uma função
de tipo
xp = A sin ωf t + B cos ωf t
Nesta expressão, A e B são constantes arbitrárias que serão determinadas substituindo a solução particular na equação diferencial,
ẋp = ωf A cos ωf t − ωf B sin ωf t
ẍp = −ωf2 A sin ωf t − ωf2 B cos ωf t
−ωf2 A sin ωf t − ωf2 B cos ωf t + ω 2 (A sin ωf t + B cos ωf t) =
A(ω 2 − ωf2 ) sin ωf t + B(ω 2 − ωf2 ) cos ωf t =
A(ω 2 − ωf2 ) =
xp =
Fm
m
e
Fm
sin ωf t
m
Fm
sin ωf t
m
∀t
B=0
Fm /k
Fm
sin
ω
t
=
sin ωf t
f
2
m(ω 2 − ωf )
1 − (ωf /ω)2
Solução geral A solução geral obtém-se juntando à solução particular a solução
da equação homogénea (oscilações livres),
x(t) = C1 sin ωt + C2 cos ωt
|
{z
}
solução homogénea
+
onde, com a notação Ω = ωf /ω,
Xm =
Xm sin ωf t
| {z }
solução particular
Fm /k
1 − Ω2
Nota-se que o movimento representado pela equação acima consiste em dois movimentos oscilatórios sobrepostos. Os dois primeiros termos representam a vibração livre do sistema. A frequência desta vibração é a frequência natural do sistema
p.22 – Capítulo 1
1.1. VIBRAÇÕES NÃO AMORTECIDAS
e depende apenas da rigidez e da massa do sistema. As constantes C1 e C2 podem ser determinadas a partir das condições iniciais. Está vibração é também
designada por vibração em regime transitório, uma vez que, no caso de vibrações
amortecidas, a amplitude deste movimento decresce rapidamente.
O último termo da equação acima represente a vibração em regime estacionário.
Este movimento é produzido e mantido pela força aplicada. A sua amplitude depende da relação entre a frequência da excitação e a frequência natural do sistema.
A razão entre a amplitude das vibrações estacionárias e a deformação estática
Fm /k, chama-se factor de amplificação dinâmica,
Rd =
1
1 − Ω2
Movimento de base
Considere-se uma partícula de massa m ligada a uma mola de constante de rigidez k, sujeita a um movimento de base harmónico,
yf = xg sin ωf t
11
00
111
000
111
00 111
11
000 000
000
111
(a)
(b)
mola
indeformada
equilíbrio
estático
xest
(c)
yf
Fe
x
P
Fe
P
X
Fx = ma
⇒
⇒
m(ẍ + ÿf ) = mg − Fe = mg − k(xest + x)
Tomando em conta que na posição de equilíbrio estático, mg = kxest e substituindo a expressão para o movimento harmónico de base,
mẍ + kx = mωf2 xg sin ωf t
2
ẍ + ω x =
ωf2 xg
sin ωf t
onde ω =
r
k
m
(1.3)
p.23 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
Solução particular Como o membro direito é uma função harmónica, a solução
particular também é uma função harmónica. Seja a solução particular uma função
de tipo
xp = A sin ωf t + B cos ωf t
Nesta expressão, A e B são constantes arbitrárias que serão determinadas substituindo a solução particular na equação diferencial,
(ω 2 − ωf2 )(A sin ωf t + B cos ωf t) = ωf2 xg sin ωf t ∀t
A = xg
Ω2
1 − Ω2
xp = Xm sin ωf t
B=0
e
com Xm = xg
Ω2
1 − Ω2
No caso de movimento de base, interesse relacionar a amplitude das vibrações
estacionárias com o deslocamento máximo da base. A razão entre estes dois deslocamentos máximos, chama-se factor de transmissibilidade. Para o calcular, nota-se que o deslocamento absoluto da massa em regime estacionário é dado por,
xt (t) = xp (t) + yf (t) = xg 1 +
Tr =
Ω2
1 − Ω2
sin ωf t = xg
1
sin ωf t
1 − Ω2
xt,máx
1
=
xg
1 − Ω2
As características das vibrações forçadas não-amortecidas, são resumidas no
seguinte quadro.
xp
x0
x(t)
xt (t)
Rd
Tr
Vibrações forçadas não-amortecidas
Força harmónica
Movimento harmónico de base
ẍ + ω 2x = (Fm /m) sin ωf t
ẍ + ω 2 x = ωf2 xg sin ωf t
(Fm /k)/(1 − Ω2 ) sin ωf t
xg Ω2 /(1 − Ω2 ) sin ωf t
C1 sin ωt + C2 cos ωt
x0 (t) + xp (t)
x(t)
x(t) + xg (t)
2
1/(1 − Ω )
–
–
1/(1 − Ω2 )
p.24 – Capítulo 1
1.1. VIBRAÇÕES NÃO AMORTECIDAS
1 1 − Ω2 8
6
4
2
1
2
3
4
Ω
Observa-se que, quando a frequência da excitação é igual a frequência natural do
sistema a amplitude de vibração torna-se infinita. Diz-se que a excitação está em
ressonância com o sistema.
A amplitude do movimento é igual ao deslocamento estático para ωf = 0 e depois
começa a crescer com ωf . Depois de ultrapassar a frequência de ressonância, a
amplitude do movimente decresce, chegar a ser mais baixa do que o deslocamento
estático para excitações com frequências muito altas.
Exercício (Beer 19.112)
A esfera com 1.2 kg forma um pêndulo com comprimento L = 600 mm que está
suspenso a partir de um cursor C com 1.4 kg. O cursor é obrigado a deslocar-se
de acordo com a relação,
xC = Ym sin ωf t
com amplitude Ym = 10 mm e uma frequência ff = 0.5 Hz. Considerando apenas
o regime estacionário, determine (a) a amplitude do movimento da esfera e (b) a
força que deve ser aplicada ao cursor C para o manter em movimento.
p.25 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
xC = Ym sin ωf t
C
L
θ
T
mg
x
X
X
Fx
Fy
...
...
mẍ = −T sin θ
mÿ = T cos θ − mg
Admitindo pequenas oscilações,
sin θ ≃ tan θ ≃ θ
cos θ ≃ 1
e o movimento ocorre segundo um eixo horizontal. Resulta então,
T = mg
mẍ = −mg
x − xC
L
⇒
ẍ + ω 2 x = ω 2 Ym sin ωf t
g
g
x = xC
L
L
r
g
com ω =
L
ẍ +
(a) A solução particular será dada por,
xp = Xm sin ωf t
onde Xm =
Ym
1 − (ωf /ω)2
Tomando em conta que
ω2 =
Xm =
g
L
ωf2 = (2πff )2
0.01
Ym
=
≃ 0.025 m
2
2
2
1 − 4π ff L/g
1 − 4 × π × 0.52 × 0.6/9.81
p.26 – Capítulo 1
1.1. VIBRAÇÕES NÃO AMORTECIDAS
(b)
xC
N
C
T
mg
θ
aC = ẍC = −ωf2 Ym sin ωf t = −ωf2 xC
X
Fx
...
mC aC = F + T sin θ
⇒
F = mC ac − T sin θ
Tomando em conta que T = mg, sin θ ≃ (x − xC )/L e ω 2 = g/L,
F = −mc ωf2 xC − mg
x − xc
= −mc ωf2 xC − mω 2 x + mω 2 xC
L
F = (mω 2 − mC ωf2 )Ym − mω 2 Xm sin ωf t
Para os valores numéricos dados,
F ≃ −0.44 sin πt N
Exercício (Beer 19.118)
Um motor com 180 kg está fixo a uma viga horizontal de massa desprezável. O
desequilíbrio do rotor é equivalente a uma massa de 28 g situada a uma distância
de 150 mm do eixo de rotação, e a deformação estática da viga devida ao peso
do motor é igual a 12 mm. A amplitude de vibração devida ao desequilíbrio pode
ser atenuada através da adição de uma placa à base do motor. Se a amplitude de
vibração em regime estacionário tiver que ser menor que 60 µm para velocidades
do motor acima de 300 rpm, determine a massa necessária da placa.
p.27 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
Motor
Rotor
ωf
δest
m
Pm sin ωf t
Mg
x
ωf t
Pm sin ωf t
Fe
Pm = mωf2 r
sumFx
...
M ẍ = Mg − Fe + Pm sin ωf t
r
Pm
k
2
sin ωf t
onde ω =
ẍ + ω x =
M
M
A vibração em regime estacionário vai ter uma amplitude dada por,
mωf2 r/(Mω 2 )
Pm /k
rm/M
Xm =
=
=
2
2
1 − (ωf /ω)
1 − (ωf /ω)
(ω/ωf )2 − 1
Xm
ωf > 300 rpm
ωf /ω
−r
1
m
M
Escrevendo o equilíbrio estático da viga,
kδest = Mg
⇒
k=
Mg
180 × 9.81
=
= 147150 N/m
δest
0.012
A frequência da estrutura, depois da adição da placa, será dada por,
ω2 =
k
M′
Tomando em conta esta definição,
rm/M ′
Xm =
k/(M ′ ωf2 ) − 1
p.28 – Capítulo 1
⇒
Xm
k
−1
M ′ ωf2
!
=r
m
M′
1.1. VIBRAÇÕES NÃO AMORTECIDAS
M′ =
k
rm
−
2
ωf
Xm
Como
ωf = 300 × 2π/60 = 10π rad/s
e
Xm = −60 × 10−6 m
resulta
M′ =
(. . . veja o enunciado e a figura)
147150 0.15 × 0.028
+
≃ 219.1 kg
100π 2
60 × 10−6
O peso da placa será
∆M = M ′ − M = 219.1 − 180 = 39.1 kg
Exercício (Beer 19.125)
Um pequeno reboque e o barco possuem a massa total de 250 kg. O reboque
está apoiado em duas molas, cada uma com 10 kN/m e desloca-se ao longo de
uma estrada cuja superfície se pode aproximar a uma curva sinusoidal com uma
amplitude de 40 mm e um comprimento de onda de 5 m. Determine (a) a velocidade para a qual ocorre a ressonância e (b) a amplitude da vibração do reboque
à velocidade de 50 km/h.
y
v
x
2Ym
λ
δest
Fe
m(ẍ − ÿ) = −kx
mẍ + kx = k ÿ
x
mg
ẍ + ω 2 x = −ω 2 Ym sin ωf t
y = Ym sin ωf t
ω2 =
k
m
ωf =
2π
2π
2πv
=
=
T
λ/v
λ
p.29 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
A solução da equação diferencial é
x(t) = Xm sin ωf t
onde a amplitude do movimento oscilatório é dada por
Xm =
Ym
1 − (ωf /ω)2
(a) A ressonância ocorre quando a amplitude do movimento é máxima, ou seja,
quando
r
r
k
k
2πv
λ
ω = ωf ⇒
=
⇒ v=
m
λ
2π m
5
v=
2π
r
(b)
Xm =
2 × 10000
≃ 7.12 m/s ≃ 25.62 km/h
250
Ym
=
1 − (ωf /ω)2
v = 50 km/h =
Xm =
Ym
1−
2πv
λ
125
m/s
9
2
m
k
0.040
≃ −0.014 m
4 × π 2 × 1252 250
1−
52 × 92
20000
1.2 Vibrações amortecidas
Na realidade, todas as vibrações são amortecidas, em maior ou menor grau, pela
acção das forças de atrito. Estas forças podem ser causadas por atrito seco - entre
corpos rígidos, por atrito fluido - quando um corpo rígido se desloca num fluido,
ou por atrito interno - entre as moléculas que constituem um corpo.
Um tipo de amortecimento com especial interesse é o amortecimento viscoso em
que a força de atrito é proporcional e oposta a velocidade do corpo em movimento
Fa = −c ẋ
A constante c expressa em Ns/m chama-se coeficiente de amortecimento viscoso.
p.30 – Capítulo 1
1.2. VIBRAÇÕES AMORTECIDAS
1.2.1 Vibrações livres
Seja uma partícula de massa m ligada a uma mola de rigidez k e a um amortecedor
de coeficiente de amortecimento viscoso c.
(a)
(b)
(c)
Fe
xest
Fe
Fa
x
mg
mg
Na posição de equilíbrio estático (b), o sistema está em repouso, portanto no amortecedor não se desenvolve força nenhuma. Escrevendo a equação de equilíbrio
estático resulta mg = kxest .
Seja uma posição qualquer (c) caracterizada pela posição x e a velocidade ẋ da
partícula. Escrevendo as equações de movimento nesta posição, resulta
mẍ = mg − cẋ − k(xest + x) = mg − kxest −cẋ − kx
| {z }
0
mẍ + cẋ + kx = 0
ou, dividindo pela massa,
k
c
ẋ + ω 2 x = 0
com ω 2 ≡
(1.4)
m
m
O movimento definido pela equação (1.4) representa um movimento oscilatório
amortecido. A solução desta equação diferencial homogénea é de tipo eλt ,
ẍ +
x = eλt
ẋ = λeλt
ẍ = λ2 eλt
c
λ2 + λ + ω 2 eλt = 0 ∀t
m
Resulta a equação característica
c
λ2 + λ + ω 2 = 0
m
cuja solução é dada por
r
k
c 2
c
±
−
λ1,2 = −
2m
2m
m
p.31 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
Designa-se por coeficiente de amortecimento crítico, ccr o valor do coeficiente de
amortecimento c que anula o radical,
r
k
ccr = 2m
= 2mω
m
Por vezes, o amortecimento de um sistema costuma ser dado em percentagem
sobre o valor do amortecimento crítico,
ζ=
c
ccr
Os valores recomendados para o factor de amortecimento ζ no cálculo de estruturas variam entre 5 − 10% para estruturas metálicas, 7 − 10% para estruturas em
betão e 10 − 20% para estruturas em madeira.
Com esta notação, a equação diferencial das vibrações livres amortecidas toma a
seguinte forma,
ẍ + 2ζω ẋ + ω 2 x = 0
(1.5)
Dependendo do valor do coeficiente de amortecimento, distinguem-se três casos:
Amortecimento super-crítico (c > ccr ou ζ > 1) As raízes da equação característica são reais e distintas, ambas negativas.
λ1 , λ2 < 0
⇒
x(t) = Aeλ1 t + Beλ2 t
⇒
lim x(t) = 0
t→∞
O movimento resultante não é oscilatório. O x tende para zero quando
t aumenta indefinidamente, ou seja, o sistema readquire a sua posição de
equilíbrio estático após um intervalo de tempo suficientemente longo.
Amortecimento crítico (c = ccr ou ζ = 1) A equação característica tem uma
raiz dupla,
λ1,2 = −ω ⇒ x(t) = (A + Bt)e−ωt
O movimento não é vibratório, retomando o sistema a sua posição de equilíbrio no menor tempo possível, sem oscilar.
Amortecimento sub-crítico (c < ccr ou ζ < 1) As raízes da equação característica são complexas conjugadas,
r
c 2
c
k
λ1,2 = −
±i
−
2m
m
2m
p.32 – Capítulo 1
1.2. VIBRAÇÕES AMORTECIDAS
Definindo,
c 2
k
m c 2
k
=
1−
−
=
m
2m
m
k 2m
!2
c
= ω 2 (1 − ζ 2)
p
ωa2 = ω 2 1 −
2m k/m
ωa2
resulta
λ1,2 = −ζω ± iωa
e
x(t) = e−ζωt (C1 sin ωa t + C2 cos ωa t)
O movimento é oscilatório,
com amplitude decrescente. A frequência de
p
2
vibração, ωa = ω 1 − ζ < ω pelo que o período de vibração do sistema
amortecido é maior do que o período de vibração correspondente ao sistema
não amortecido. O sistema readquire a sua posição de equilíbrio estático
após um intervalo de tempo suficientemente longo.
Amplitude do movimento
amortecimento crítico
amortecimento supra-crítico
Tempo
amortecimento sub-crítico
Exercício (Beer 19.134)
Um bloco A com 4 kg é solto de uma altura de 800 mm
sobre um bloco B com 9 kg, que está em repouso. O
bloco B está apoiado numa com constante de rigidez
k = 1500 N/m e está ligado a um amortecedor com coeficiente de amortecimento c = 230 Ns/m. Sabendo que
não existe qualquer ressalto, determine a distância máxima percorrida pelos blocos após o choque.
A
h
B
k
c
p.33 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
• A velocidade do bloco A antes de choque obtém-se aplicando o princípio
de conservação da energia.
p
1
mA gh = mA vA2 ⇒ vA = 2gh
2
• A velocidade dos dois blocos após o choque resulta da conservação da quantidade de movimento, tomando em conta que não há forças impulsivas externas e que o choque é perfeitamente plástico.
mA p
2gh
mA vA = (mA + mB )v ′ ⇒ v ′ =
mA + mB
√
4
× 2 × 9.81 × 0.8 ≃ 1.219 m/s
v′ =
4+9
• As forças que actuam em seguida sobre o sistema formado pelos dois blocos
são o peso, à força elástica e à força de amortecimento viscoso.
Tomando em conta que a nova posição de equilíbrio estático, devida ao suplemento de peso provocado pelo bloco A é dada por,
x0 =
mA g
4 × 9.81
=
≃ 0.026 m
k
1500
Mg
x0
x
Fe
Fa
temos,
M ẍ = Mg − k(x0 + x) − cẋ
⇒
ẍ +
c
k
ẋ +
x=0
M
M
ou seja,
ẍ + 2ζω ẋ + ω 2 x = 0
onde
r
r
k
1500
=
≃ 10.742 rad/s
ω=
M
4+9
ccr = 2Mω = 2 × (4 + 9) × 10.742 ≃ 279.266 Ns/m
c
230
ζ=
=
≃ 82%
ccr
279.266
Como o amortecimento é sub-crítico, o movimento resultante será dado por
x(t) = e−ζωt (C1 sin ωa t + C2 cos ωa t)
com
ωa = ω
ou seja
p
√
1 − ζ 2 = 10.742 × 1 − 0.822 ≃ 6.15 rad/s
x(t) = e−8.81 t [C1 sin(6.15 t) + C2 cos(6.15 t)]
p.34 – Capítulo 1
1.2. VIBRAÇÕES AMORTECIDAS
• As constantes C1 e C2 vão ser determinadas a partir das condições iniciais
do movimento:
x(0) = −x0
e
ẋ(0) = v ′
x(0) = C2 = −x0
⇒
C2 = −0.026
ẋ(t) = e−8.81 t [(6.15 C1 − 8.81 C2) cos(6.15 t)+
(−8.81 C1 − 6.15 C2) sin(6.15 t)]
ẋ(0) = 6.15 C1 − 8.81 C2 = v ′
C1 =
⇒
C1 =
v ′ + 8.81 C2
6.15
1.219 − 8.81 × 0.026
≃ 0.161
6.15
A equação do movimento oscilatório em torno da posição de equilíbrio estático, fica então definida por
x(t) = e−8.81 t [0.161 sin(6.15 t) − 0.026 cos(6.15 t)]
−0.02
x0
−0.01
0.2
0.4
0.6
0.8
1
t
xM
0.01
0.02
0.03
x
• O deslocamento máximo xm , será alcançado quando a velocidade do sistema será nula.
ẋ(t) = e−8.81 t [1.219 cos(6.15 t) − 1.259 sin(6.15 t)]
1
1.219
ẋ(t) = 0 ⇒ t =
≃ 0.125 s
arctan
6.15
1.259
O deslocamento máximo será então,
xm = x(0.125) ≃ 0.031 m
p.35 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
• A distância máxima percorrida pelos blocos após o choque será,
dmáx = x0 + xm = 0.026 + 0.031 = 0.057 m
1.2.2 Vibrações forçadas
Força periódica
Seja uma partícula de massa m ligada a uma mola de rigidez k e a um amortecedor
de coeficiente de amortecimento viscoso c sob a acção de uma força periódica,
F = Fm sin ωf t
(a)
(b)
(c)
Fe
xest
Fe
Fa
x
mg
F
mg
A equação de movimento em torno da posição de equilíbrio estático será
m ẍ + c ẋ + k x = Fm sin ωf t
ou, dividindo pela massa,
ẍ + 2ζω ẋ + ω 2 x =
Fm
sin ωf t
m
(1.6)
A solução geral desta equação diferencial não-homogénea obtém-se pela adição
de uma solução particular à solução geral da equação homogénea.
A solução geral da equação homogénea, que foi obtida no caso das vibrações
livres amortecidas, depende do amortecimento do sistema, mas de qualquer modo
esvanece com o tempo. O intervalo de tempo inicial em que esta solução tem
valores não desprezáveis, chama-se zona transitória.
A solução particular representa a vibração em regime estacionário, significando
que depois de um intervalo suficientemente longo, esta solução caracteriza sozinha o movimento do sistema.
p.36 – Capítulo 1
1.2. VIBRAÇÕES AMORTECIDAS
Se a excitação fosse harmónica, a solução particular é também harmónica,
xp = A sin ωf t + B cos ωf t
e substituindo na equação diferencial, temos
−ωf2 A sin ωf t − ωf2 B cos ωf t + 2ζωωf A cos ωf t − 2ζωωf B sin ωf t+
Fm
sin ωf t
∀t
ω 2 A sin ωf t + ω 2 B cos ωf t =
m
ω 2 − ωf2 −2ζωωf
2ζωωf ω 2 − ωf2
A
B
=
Fm /m
0
ou, dividindo cada linha por ω 2 e utilizando as notações Ω = ωf /ω e δ0 = Fm /k,
1 − Ω2 −2ζΩ
2ζΩ 1 − Ω2
A
B
=
A=
(1 − Ω2 )
δ0
(1 − Ω2 )2 + (2ζΩ)2
B=
−2ζΩ
δ0
(1 − Ω2 )2 + (2ζΩ)2
δ0
0
Para por em evidência a amplitude do movimento, a solução particular pode ser
escrita sob forma
xp = Xm sin(ωf t − φ)
onde
Xm =
e
√
A2 + B 2 = p
1
δ0
(1 − Ω2 )2 + (2ζΩ)2
B
2ζΩ
φ = arctan −
= arctan
A
1 − Ω2
A razão entre a amplitude das vibrações em regime estacionário e a deformação
estática provocada pela aplicação da força Fm , designa-se por factor de amplificação dinâmica,
1
Rd = p
2
(1 − Ω )2 + (2ζΩ)2
O factor de amplificação dinâmica depende da razão das frequências, Ω = ωf /ω
e do factor de amortecimento do sistema ζ.
p.37 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
Rd
ζ =0
4
ζ = 0.125
3
ζ = 0.250
2
ζ = 0.375
1
Ω
ζ = 1.000
0.5
1
1.5
2
2.5
3
Observa-se que a amplitude de uma vibração forçada pode manter-se pequena,
quer através da escolha de um elevado coeficiente de amortecimento viscoso, quer
mantendo afastadas uma da outra a frequência natural do sistema e a frequência
da excitação.
Movimento de base
Seja uma partícula de massa m
ligada a uma mola de rigidez k
e a um amortecedor de coeficiente de amortecimento viscoso
c. O sistema está sujeito a um
movimento harmónico de base,
xf (t) = xg sin ωf t
δest
x
m
k
c
h
1111111
0000000
0000000
1111111
xf
Para uma posição qualquer x, a equação de movimento é dada por,
X
F = ma ⇒ ma = −P + Fe − Fa
onde
d2
(xf + h + x) = ẍf + ẍ
dt2
Fe = k(δest − x)
Fa = cẋ
a=
Resulta,
m(ẍf + ẍ) = −mg + k(δest − x) − cẋ
p.38 – Capítulo 1
⇒
mẍ + cẋ + kx = −mẍf
1.2. VIBRAÇÕES AMORTECIDAS
e dividindo pela massa, e substituindo a expressão da aceleração da base,
ẍ + 2ζω ẋ + ω 2 x = ωf2 xg sin ωf t
(1.7)
Observa-se que, fazendo a notação,
Fm = mωf2 xg
a equação (1.7) transforma-se em
ẍ + 2ζω ẋ + ω 2 x =
Fm
sin ωf t
m
ou seja, numa forma idêntica à (1.6) que representava a equação diferencial das
vibrações amortecidas forçadas, provocadas por uma força harmónica.
A solução particular da equação (1.7) resulta,
mωf2 xg
Fm
Rd sin(ωf t − φ) =
Rd sin(ωf t − φ)
k
mω 2
ω 2
f
xp (t) = xg
Rd sin(ωf t − φ)
ω
xp = δ0 Rd sin(ωf t − φ) =
Viu-se que, no caso de uma força aplicada, calculou-se o factor de amplificação
dinâmica, Rd . Este factor permite relacionar os deslocamentos máximos da massa
obtidos para uma aplicação estática, respectivamente dinâmica da força.
No caso de movimento de base, interesse relacionar o deslocamento máximo da
base com o deslocamento máximo da massa. O coeficiente que permite este relacionamento, chama-se factor de transmissibilidade, Tr . Para o calcular, nota-se
que o deslocamento absoluto da massa em regime estacionário é dado por,
ω 2
f
xt (t) = x(t) + xf (t) = xg
Rd sin(ωf t − φ) + xg sin ωf t
ω
Para por em evidência a amplitude do movimento, o deslocamento absoluto escreve-se como
xt (t) = Xm sin(ωf t − Φ)
e identificando os termos,
ω 2
f
Rd cos φ
X
cos
Φ
=
x
+
x
g
g
m
ω
X sin Φ = x ωf 2 R sin φ
m
g
d
ω
p.39 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
Utilizando a notação Ω = ωf /ω,
Xm
cos Φ = 1 + Ω2 Rd cos φ
xg
Xm
sin Φ = Ω2 Rd sin φ
xg
Xm
=
⇒ Tr =
xg
s
1 + (2ζΩ)2
(1 − Ω2 )2 + (2ζΩ)2
Observa-se que uma redução na transmissibilidade nem sempre se consegue com
um aumento do amortecimento.
Tr
ζ =0
3
ζ = 0.125
2.5
ζ = 0.250
2
ζ = 0.375
1.5
1
0.5
ζ = 1.000
0.5
Ω
1
1.5
2
2.5
3
Exercício
Considere o sistema da figura que representa um carro que sobe a rampa de
transição para o tabuleiro de uma ponte.
a) Escreva a equação de movimento do carro, admitindo que mantêm a velocidade horizontal v0 constante e que a rampa tem uma inclinação h/L
constante;
b) Sendo M = 1000 kg, c = 0.05 ccr , v0 = 40 km/h, k = 250 kN/cm, h = 1 m
e L = 100 m, qual é a aceleração máxima de M no trajecto ao longo da
rampa?
M
ut
k
v0
c
ug
L
p.40 – Capítulo 1
h
1.2. VIBRAÇÕES AMORTECIDAS
a) Como a velocidade horizontal é constante, o movimento do carro segundo
o eixo horizontal é rectilíneo e uniforme definido pela equação
x(t) = v0 t
No estudo que se segue será considerada apenas a componente vertical deste
movimento.
Uma vez na rampa inclinada, as forças que actuam no corpo de massa M
são o peso, a força elástica e a força de amortecimento.
Ma
u
Fe
uest
Fa
M
P
h0
h0
k
c
1111111111111111111
0000000000000000000
0000000000000000000
1111111111111111111
ug
Ma = −P + Fe − Fa
onde
d2
d2
a = 2 (ug + h0 + u) = 2
dt
dt
Fe = k(uest − u)
v0 h
t + h0 + u
L
Fa = cu̇
= ü
Resulta,
M ü = −Mg + kuest −ku − cu̇
{z
}
|
0
M ü + cu̇ + ku = 0
ou, dividindo pela massa,
ü + 2ζω u̇ + ω 2u = 0
A solução desta equação diferencial representa o movimento da massa M
em relação à posição de equilíbrio estático. O movimento absoluto da massa
é dado por
ut (t) = ug (t) + h0 + u(t) =
v0 h
t + h0 + u(t)
L
p.41 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
onde ug é a componente vertical do deslocamento da base e h0 uma constante (altura do veículo).
b) Como o movimento oscilatório definido pela equação diferencial tem um
amortecimento sub-critico (ζ = 5%),
u(t) = e−ζωt (C1 sin ωa t + C2 cos ωa t)
u̇(t) = e−ζωt [(C1 ωa − C2 ζω) cos ωa t − (C2 ωa + C1 ζω) sin ωa t]
p
com ωa = ω 1 − ζ 2 .
As constantes C1 e C2 vão ser determinadas a partir das condições iniciais
do movimento,
u(0) = 0
u̇(0) = v0y =
e
u(0) = C2 = 0
⇒
u̇(0) = C1 ωa − C2 ζω = C1 ωa =
Resulta
u(t) =
v0 h
L
C2 = 0
v0 h
L
⇒
C1 =
v0 h
ωa L
v0 h −ζωt
e
sin(ωa t)
ωa L
v0 h −ζωt
e
[ωa cos(ωa t) − ζω sin(ωa t)]
ωa L
v0 h −ζωt 2 2
e
(ζ ω − ωa2 ) sin(ωa t) − 2ζωωa cos(ωa t)
ü(t) =
ωa L
u̇(t) =
u [m]
0.0006
0.0004
0.0002
t [s]
0.05
−0.0002
−0.0004
p.42 – Capítulo 1
0.1
0.15
0.2
1.2. VIBRAÇÕES AMORTECIDAS
Para os valores numéricos dados,
ω=
ωa = ω
ü [m/s2 ]
r
k
=
M
r
250 × 105
≃ 158.11 rad/s
1000
p
√
1 − ζ 2 = 158.11 1 − 0.052 ≃ 157.91 rad/s
10
5
0.05
0.1
0.15
0.2
t [s]
−5
−10
−15
u(t) ≃ 0.000703636 e−7.9055t sin(157.91t)
ü(t) ≃ e−7.9055t [−1.75678 cos(157.91t) − 17.5016 sin(157.91t)]
A aceleração máxima resulta então,
d ü
=0
dt
⇒
t ≃ 0.009s
⇒
amáx ≃ −16.4 m/s2
O deslocamento absoluto da massa é apresentado na figura seguinte.
p.43 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
ut [m]
0.02
0.015
0.01
0.005
h0
0.05
0.1
0.15
t [s]
0.2
1.3 Exercícios propostos
Exercício
O sistema representado na figura consiste numa barra rígida, apoiada num ponto
fixo em O, ligada a uma mola e a um amortecedor. A massa total m1 = 2m do
troço OB está uniformemente distribuída no seu comprimento. Os troços AO e
BC não possuem massa estando uma placa circular de massa m2 = m ligada
rigidamente ao ponto C. Sabendo que m = 2kg, L = 3m, k = 800N/m e
c = 200Ns/m, determine:
(a) a equação de movimento do sistema para pequenas oscilações. Tome o
ângulo θ de rotação da barra em torno do ponto O como coordenada generalizada;
(b) a frequência das vibrações amortecidas ωa e o factor de amortecimento do
sistema ζ.
R = L/8
A
O
θ
c
B
k
L/2
p.44 – Capítulo 1
C
3L/4
L/4
L/4
1.3. EXERCÍCIOS PROPOSTOS
(a) Considerando as pequenas vibrações em torno da posição de equilíbrio,
L
mg θ − k
4
3L
4
X
MO = IO θ̈
3L
L
L
θ
−c
= IO θ̈
θ̇
4
2
2
"
2
2 #
1
L
L
1
I0 = m1 L2 + m1
+ m2 R2 + m2 L2 +
12
2
2
4
IO =
Resulta:
L2 1 L2
667
17
1
2mL2 + 2m + m + mL2
=
mL2
12
4
2 64
16
384
667
L2
9L2 L
2
mL θ̈ + c θ̇ + k
− mg θ = 0
384
4
16
4
ou,
m̄θ̈ + c̄θ̇ + k̄θ = 0
onde
m̄ =
667mL2
≈ 31.27
384
c̄ =
cL2
= 450
4
k̄ =
9kL2 L
− mg = 4035.3
16
4
(b) A frequência natural do sistema sem amortecimento é dada por,
ωn =
r
k̄
≈ 11.36 rad/s
m̄
O factor de amortecimento,
ζ=
c̄
450
c̄
=
≈
≈ 0.633 (sub-crítico)
c̄cr
2m̄ωn
2 × 31.27 × 11.36
A frequência das vibrações amortecidas,
ωa = ωn
p
1 − ζ 2 ≈ 8.79 rad/s
p.45 – Capítulo 1
CAPÍTULO 1. VIBRAÇÕES MECÂNICAS
Exercício
A massa m1 é suportada pela mola k estando em
equilíbrio estático. Uma segunda massa m2 cai de
uma altura h e choca com a massa m1 , ficando as
massas, a partir do instante do choque, ligadas uma
à outra. Determine o subsequente movimento u(t)
medido a partir da posição de equilíbrio estático da
massa m1 antes do choque.
k
m2
h
m1
• a velocidade da massa m2 no instante do choque calcula-se aplicando o
princípio da conservação da energia:
p
1
m2 gH = mv02 ⇒ v0 = 2gh
2
• A velocidade das duas massas imediatamente após o choque calcula-se aplicando o princípio da conservação da quantidade de movimento:
m2 p
(m1 + m2 )v = m2 v0 ⇒ v =
2gh
m1 + m2
• A nova posição de equilíbrio estático será dada por,
m2 g
kδe = m2 g ⇒ δe =
k
• A frequência das pequenas oscilações em torno da nova posição de equilíbrio será
r
k
ω=
m1 + m2
• As vibrações em torno da posição de equilíbrio são definidas por
u(t) = A sin ωt + B cos ωt
onde A e B são constantes arbitrárias que vão ser determinadas a partir das
condições iniciais.
• Admitindo o eixo u dirigido para cima, as condições iniciais são
m2 p
m2 g
u̇(0) = −v = −
u(0) = δe =
2gh
k
m1 + m2
Resulta então
u(t) = A sin ωt + B cos ωt
u̇(t) = ωA cos ωt − ωB sin ωt
u(0) = u0 ; u̇(0) = u̇0
p.46 – Capítulo 1
⇒
B = u0
ωA = u̇0 ⇒ A = u̇0 /ω
1.3. EXERCÍCIOS PROPOSTOS
u(t) =
r
u(t) = −
u̇0
sin ωt + u0 cos ωt
ω
2gh
m2
√
sin
k
m1 + m2
r
!
!
r
k
k
m2 g
t +
t
cos
m1 + m2
k
m1 + m2
u
choque
uM
u0
u̇0
u0
t
posição
equilíbrio
−u0
−uM
a amplitude do movimento será,
uM =
√
A2 + B 2 =
r
u20 +
u̇20
ω2
Em relação à posição de equilíbrio estático da massa m1 antes do choque,
ū = u − u0
p.47 – Capítulo 1