Mecânica
Cinemática Vetorial
Mecânica » Cinemática Vetorial
1
Referenciais
Do ponto de vista estritamente da localização de um ponto no espaço, temos muitas possibilidades.
Isso significa que temos várias opções de escolha tanto de referenciais quanto de coordenadas.
Em geral, um referencial é baseado na escolha de elementos da geometria plana e espacial
adotados como um sistema de referência. Podemos empregar:
• tanto um conjunto de pontos
• quanto curvas no plano
• ou superfícies no espaço
Todos eles servem como referência para localizar um ponto no espaço, além de ser possível
adotar também uma combinação desses elementos.
A partir dessas referências, de natureza geométrica, introduzimos um algoritmo por meio do
qual podemos especificar um ponto do espaço a partir de um conjunto ordenado de valores, aos
quais damos o nome de coordenadas.
Atenção
Ao número de coordenadas damos o nome de dimensionalidade
do sistema de referência.
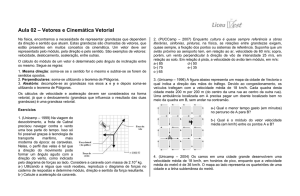
Um referencial pode ser apenas um conjunto de pontos. Por exemplo, poderíamos adotar três
pontos no plano como referência. Temos, nesse caso, um referencial constituído a partir desses
três pontos. Para identificá-los, é necessário que haja pontos materiais nele localizados. Podemos
especificar um ponto do plano a partir da especificação da distância entre esses três pontos. Isso
requer a introdução de 3 coordenadas (os raios dos círculos a partir dos pontos de referência).
Adotamos, portanto, 3 coordenadas para esse tipo de referencial.
Analogamente, dados quatro pontos no espaço, podemos, a partir da especificação das distâncias
entre esses pontos (quatro valores para os raios das superfícies esféricas), determinar a posição de
qualquer ponto no espaço.
Determinando a posição no plano adotando-se três pontos como referência.
Mecânica » Cinemática Vetorial
2
No caso do plano, podemos também fazer uso de sistemas de referência baseados no uso de:
• retas;
• retas orientadas;
• semirretas;
• segmentos de reta;
• circunferências e;
• cônicas.
Saiba mais
O sistema cartesiano é o mais simples entre todos. Ele faz uso, no
caso do plano, de duas retas orientadas e ortogonais entre si.
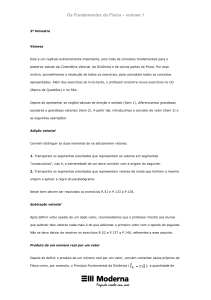
Para ilustrar a riqueza de alternativas, consideremos dois exemplos simples. Podemos adotar,
como referencial no plano, um segmento de reta cujo comprimento é tal que suas extremidades se
situam nos pontos A e B. Qualquer ponto do plano pode ser determinado a partir da especificação
das coordenadas φ e θ definidas como “ângulos de visão” do segmento AB. Tal referencial recebe o
nome de referencial bipolar.
Bernoulli, matemático suíço, parece ter sido o primeiro a introduzir um segmento de reta como
referencial. Nesse caso, consideramos um segmento de reta a partir de um ponto de origem até
o ponto P - o segmento OP. Nesse sistema de referência, adotamos as coordenadas (ρ, θ) para
determinar a posição do ponto no plano. A coordenada ρ especifica o tamanho do segmento OP,
enquanto a coordenada θ especifica a inclinação do segmento de reta em relação ao eixo x. Tais
coordenadas recebem o nome de coordenadas polares.
No espaço tridimensional é comum o emprego de superfícies como sistemas de referência.
Assim, sabemos que:
• o referencial cartesiano faz uso de superfícies planas;
• o sistema de referência cilíndrico faz uso de um plano, um semiplano e um cilindro;
• o referencial esférico faz uso de um cone, um semiplano e uma esfera.
A escolha de um referencial e de um conjunto de coordenadas para especificar um ponto do espaço
não é, no entanto, suficiente para encarar várias questões que envolvem a formulação das leis físicas, e
isso porque as leis são formuladas em termos de grandezas vetoriais e grandezas escalares.
Coordenadas bipolares e coordenadas polares.
Mecânica » Cinemática Vetorial
3
Atenção
A escolha de um sistema de coordenadas pressupõe que saibamos
determinar as componentes de um vetor naquele referencial. Necessário se faz, assim, uma definição mais geral de referencial. A seguir
veremos que três vetores, quando escolhidos adequadamente, se constiuem num referencial muito útil para representar grandezas vetoriais
arbitrárias. Por se tratar de um novo tipo de referencialnos referimos a
essa base de vetores, comoreferencial generalizado.
Referencial Cartesiano Generalizado
Tendo introduzido o conceito de vetores, podemos agora redefinir o conceito de referencial.
Para tanto, seguiremos as ideias do matemático alemão Hermann Weyl, que abordou esse tema
em seu livro famoso “espaço, tempo e matéria”.
De acordo com Weyl, um referencial pode ser constituido por um ponto O, e três vetores
denominados vetores da base do referencial. É como se vê em uma definição formal, baseada no
conceito de vetores.
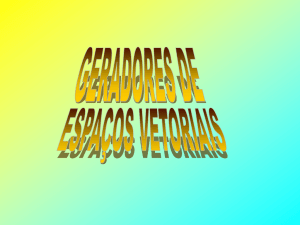
Vamos introduzir, primeiramente, o referencial cartesiano generalizado. De acordo com
Weyl, esse novo referencial cartesiano é constituído por um ponto O e três vetores muito
especiais,denominados
i, j ek
( 1 )
Esses vetores têm a mesma orientação dos eixos x, y e z e sentido indicado na Figura ao lado.
Eles têm módulo 1, e tal propriedade pode ser escrita assim:
i=
=
j k =1
Vetores de módulo unitário são denominados versores.
( 2 )
Referencial cartesiano
generalizado, utilizando
três vetores.
Mecânica » Cinemática Vetorial
4
Tendo em vista que os eixos são ortogonais entre si, eles também exibem tal propriedade. Em
termos do produto escalar de dois vetores, o fato de serem ortogonais entre si se escreve como:
i⋅ j = i⋅k = j⋅k = 0
( 3 )
Ademais, são válidas as seguintes relações envolvendo produtos vetoriais:
(i × i ) = j × j = k × k = 0
i × j = − j×i = k
k ×i = − i ×k = j
j×k = − k× j = i
(
) (
) ( )
) ( )
) ( )
(
(
(
)
( 4 )
Observe que, nesse contexto simples, estamos apenas trocando o conceito de três eixos orientados por três vetores que têm a direção e o sentido dos eixos.
Nesse novo referencial, um vetor qualquer (V ) pode ser escrito como uma combinação linear
dos vetores i , j e k :
V = Vx i + Vy j + Vz k
( 5 )
onde Vx, Vy e Vz são as componentes cartesianas do vetor V .
Utilizando esse referencial, fica muito fácil lidar com vetores, uma vez que as operações com
tais grandezas se simplificam muito. Por exemplo, a soma (ou diferença) de dois vetores se
escreve como:
V1 ± V2 = V1x i + V1 y j + V1z k ± V2 x i ± V2 y j ± V2 z k
= (V1x ± V2 x ) i + (V1 y ± V2 y ) j + (V1z ± V2 z ) k
( 6 )
Consideremos agora o produto escalar de dois vetores. Utilizando o novo referencial cartesiano,
o produto escalar de dois vetores se escreve como:
V1 ⋅ V2 = V1x i + V1 y j + V1z k ⋅ V2 x i + V2 y j + V2 z k
( 7 )
= (V1x i ) ⋅ V2 x i + V2 y j + V2 z k + (V1 y j ) ⋅ V2 x i + V2 y j + V2 z k + V1z k ⋅ V2 x i + V2 y j + V2 z k
(
(
)(
)
(
)
) (
)(
)
Mecânica » Cinemática Vetorial
5
Efetuando o produto escalar de cada um dos termos acima, utilizando as propriedades dos
para visualizar
matemáticas
vetores da base (2), obtemos
para oexpressões
produto escalar:
utilizadas em outras páginas, clique sobre
o respectivo número.
V1 ⋅ V2 = (V1xV2 x + V1 yV2 y + V1zV2 z )
( 8 )
E isso mais ilustra, mais uma vez, a enorme utilidade do uso de um referencial baseado em
vetores com as propriedades apresentadas em (1).
As grandezas Vx, Vy e Vz são denominadas componentes do vetor V no referencial cartesiano. Tais
componentes são definidas como produtos escalares do mesmo pelos vetores da base. Ou seja:
Vx = i ⋅ V
( 9 )
Vy = j ⋅ V
Vz = k ⋅ V
A definição acima mostra que, pela definição do produto escalar de vetores, as componentes
são as projeções dos vetores ao longo dos respectivos eixos.
Por exemplo, sendo a posição uma grandeza vetorial, o vetor posição no referencial cartesiano
considerado é dado por:
r = xi + yj + zk
( 10 )
Estabelecendo, assim, um novo sentido – o de projeção do vetor posição ao longo dos eixos –
para as coordenadas x, y e z.
Das propriedades (8) resulta que o módulo de um vetor é definido como:
V ≡ V ⋅ V = Vx 2 + Vy 2 + Vz 2
( 11 )
Finalmente, utilizando a base de vetores (1), podemos introduzir uma nova definição do produto
vetorial de dois vetores, ou seja, o produto vetorial dos vetores A e B é um terceiro vetor, C, definido por:
C = A× B
( 12 )
Mecânica » Cinemática Vetorial
6
É tal que o vetor C pode, igualmente, ser definido a partir do determinante:
i
j k
C = det Ax Ay Az
B B B
y
z
x
( 13 )
Assim, temos um método formal de introduzir grandezas vetoriais, além da posição, por meio do
uso de um referencial cartesiano baseado no uso de vetores.
exercícios resolvidos
Referenciais Gerais
O referencial cartesiano definido em termos de três vetores da base não é único. Um referencial
arbitrário, nessa nova definição de referencial, consiste de um ponto de origem – O – e três vetores
da base, não necessariamente ortogonais entre si. Isso nos levará a entender a definição de componentes do vetor posição, força, velocidade e aceleração e de outros vetores em novos referenciais.
Designando os vetores da base de um referencial arbitrário por e1, e2 e e3, podemos então definir
um vetor arbitrário como a combinação linear entre os vetores da base:
V = V1e1 + V2 e2 + V3e3
( 14 )
onde, agora, V1, V2 e V3 são as componentes do vetor nesse referencial. Por exemplo, o vetor
posição se escreve, num referencial arbitrário, como:
r = x1e1 + x2 e2 + x3e3
( 15 )
onde x1, x2 e x3 são as coordenadas do vetor posição nesse novo referencial.
No sentido mais geral,apresentado acima, quando utilizamos coordenadas diferentes das
coordenadas cartesianas, coordenadas essas representadas agora por Q1, Q2 e Q3, tal conjunto de
coordenadas nos leva a uma nova escolha de referencial. Ou seja, o uso de novas coordenadas
pressupõe a introdução de uma nova base de vetores que depende das coordenadas. Assim, quando
Mediante uma escolha mais
geral de coordenadas somos
levados a uma nova base de
vetores. E isso nos leva a um
novo referencial generalizado.
Mecânica » Cinemática Vetorial
7
empregamos as novas coordenadas, devemos utilizar uma nova base de vetores, e1, e2 e e3, dependentes
das coordenadas Q1, Q2 e Q3, a qual escrevemos sob a forma de funções vetoriais:
e1 = e1 ( Q1 , Q2 , Q3 ) , e2 = e2 ( Q1 , Q2 , Q3 ) e e3 = e3 ( Q1 , Q2 , Q3 )
( 16 )
Uma vez definidas as coordenadas, existem métodos matemáticos que nos permitem determinar os vetores da base como função das mesmas. A seguir, isso será ilustrado no caso do
referencial polar.
Componentes de um vetor
numa base generalizada.
Vetores em Coordenadas Polares
As coordenadas polares são definidas a partir das coordenadas cartesianas de acordo com as
expressões:
x = ρ cos ϕ
y = ρ sen ϕ
( 17 )
ou, analogamente,
ρ = x2 + y 2
y
ϕ = arctan
x
( 18 )
Coordenadas polares φ e ρ.
No caso das coordenadas polares, os vetores da base (no caso, de módulo 1- versores, portanto)
serão denominados eρ e eϕ, os quais são definidos como:
eρ = cos ϕi + senϕj
( 19 )
eϕ = −senϕi + cos ϕj
Observe que tais vetores indicam, em cada ponto de uma circunferência, a direção perpendicular
a ela por aquele ponto e a direção tangencial à circunferência por esse mesmo ponto.
Vetores da base do
referencial polar.
Mecânica » Cinemática Vetorial
8
Assim, um vetor V será escrito no referencial polar, como uma soma:
V = Vρ eρ + Vϕ eϕ
( 20 )
onde Vρ e Vφ são as componentes polares do vetor. Antes de enunciar as leis de Newton, fazendo
uso dessas coordenadas, devemos escrever a velocidade e a aceleração em coordenadas polares.
Vetores Velocidade e Aceleração em
coordenadas cartesianas
Na cinemática vetorial, procuramos definir as grandezas vetoriais velocidade e aceleração a partir
do conceito de referencial. Definimos, primeiramente, o vetor deslocamento entre dois instantes
de tempo, que diferem por Δt, como a diferença entre os vetores de posição entre esses instantes
(vide Figura ), ou seja:
∆r ≡ r ( t + ∆t ) − r ( t )
( 21 )
A velocidade média, v ( t ), é definida como o quociente entre o vetor deslocamento e o intervalo de
tempo associado a ele:
∆r ( t ) r ( t + ∆t ) − r ( t )
v (t ) =
≡
∆t
∆t
( 22 )
O vetor velocidade é definido como a taxa de variação instantânea do vetor posição, isto é:
r ( t + ∆t ) − r ( t )
dr ( t )
v (t ) =
≡ lim
∆t →0
dt
∆t
O Vetor deslocamento, Δr , é definido para dois instantes de tempo.
( 23 )
Tendo em vista que os vetores da base são vetores constantes, observa-se que, num referencial
cartesiano, o vetor velocidade é determinado derivando-se o vetor posição em relação ao tempo.
Assim, escreve-se:
dx dy dz
v= i+
j+ k
dt
dt
dt
( 24 )
Mecânica » Cinemática Vetorial
9
Assim, as componentes do vetor velocidade no sistema cartesiano são dadas por:
=
vx
dx
dy
=
, vy
dt
dt
e
vz =
dz
dt
( 25 )
exercícios resolvidos
Vetor aceleração
A fim de definir o vetor aceleração, consideremos a variação de velocidade. Definimos dois
instantes de tempo que diferem por Δt. Tal variação é dada pela diferença entre os vetores velocidades entre esses instantes, ou seja:
∆v ≡ v ( t + ∆t ) − v ( t )
( 26 )
A aceleração média, a ( t ), é definida como o quociente entre a diferença de velocidades e o intervalo de tempo associado a ela:
∆v ( t ) v ( t + ∆t ) − v ( t )
a (t ) =
≡
∆t
∆t
( 27 )
O vetor aceleração é definido como a taxa de variação instantânea do vetor velocidade, isto é:
∆v ( t )
v ( t + ∆t ) − v ( t )
dv ( t )
a (t ) =
≡ lim
≡ lim
∆t → 0
∆t → 0
dt
∆t
∆t
( 28 )
Assim, o vetor aceleração é dado pela taxa de variação instantânea do vetor velocidade:
dv ( t )
a (t ) =
dt
( 29 )
Mecânica » Cinemática Vetorial
10
Observando que os vetores da base são vetores constantes, verificamos que num referencial
cartesiano o vetor aceleração é determinado derivando-se as componentes do vetor velocidade
com respeito ao tempo:
dv dvx dv y dvz
a=
i+
j+
k
=
dt
dt
dt
dt
( 30 )
Como resultado, as componentes do vetor aceleração podem ser escritas, no sistema cartesiano,
de duas formas equivalentes,
dvx
=
dt
dv y
=
ay =
dt
dvz
=
az =
dt
=
ax
d2x
dt 2
d2y
dt 2
d2z
dt 2
( 31 )
Ou seja:
d2x d2 y d2z
a (t ) = 2 i + 2 j + 2 k
dt
dt
dt
onde o símbolo d2/dt2 significa derivar duas vezes a mesma função.
exercícios resolvidos
( 32 )
Mecânica » Cinemática Vetorial
11
Vetor posição e vetor velocidade em
Coordenadas Polares
No caso das coordenadas polares, o vetor posição é dado pela expressão:
r = ρeρ
( 33 )
onde eρ é um dos dois vetores da base polar, dado pela expressão (17). Ele tem a mesma direção e
sentido do vetor posição.
O vetor velocidade é sempre dado pela taxa com que o vetor posição muda com o tempo. Deri
vando a expressão: r = ρeρ com relação ao tempo e utilizando a regra da cadeia para a derivada do
produto de funções, temos:
deρ
dr d ρ
v≡
=
eρ + ρ
dt
dt dt
( 34 )
Derivando eρ com relação ao tempo, utilizando o resultado do Exercício Resolvido sobre
Vetor Aceleração e a expressão (34), vemos que:
dϕ
dr d ρ
v≡
=
eρ + ρ
eϕ
( 35 )
dt dt
dt
Assim, as componentes do vetor velocidade em coordenadas polares são:
vρ =
dρ
dt
vϕ = ρ
dϕ
dt
( 36 )
As expressões (36) ilustram, quando comparadas a (25), o fato de que vetores como a velocidade
podem ter diferentes coordenadas em diferentes referenciais.
exercícios resolvidos
Vetor posição no referencial polar.
Mecânica » Cinemática Vetorial
12
Vetor posição e vetor velocidade em
Coordenadas Cilíndricas
O referencial cilíndrico difere muito pouco do referencial polar, pois tudo que devemos fazer é
adicionar o vetor k , já definido para o referencial cartesiano, aos dois vetores da base polar. Assim,
os vetores da base nesse referencial são:
eρ = cos ϕi + senϕj
( 37 )
eϕ = −senϕi + cos ϕj
ez = k
A adição do vetor k permite-nos estudar movimentos em 3 dimensões (e não apenas no plano).
O vetor posição, no referencial cilíndrico, assume a forma:
r = ρeρ + zk
( 38 )
A velocidade se escreve nesse referencial como:
d ϕ dz
dρ
v=
eρ + ρ
eϕ + k
dt
dt
dt
( 39 )
Vetor aceleração em Coordenadas Polares
e Cilíndricas
Calculando a taxa de variação do vetor velocidade em função do tempo, verificamos, a partir de (35),
que a aceleração em coordenadas polares é dada por:
d 2ϕ
d ϕ deϕ d ρ d ϕ
dv d 2ρ d ρ deρ
a≡
=
eρ +
+ ρ 2 eϕ + ρ
+
.eϕ
dt dt 2
dt dt
dt
dt dt
dt dt
( 40 )
Utilizando agora as expressões do exemplo 04 e agrupando-as, encontramos:
2
d 2ϕ
d 2ρ
d ϕ d ρ d ϕ
a ≡ 2 − ρ
e
+
2
+
ρ
eϕ
ρ
dt 2
dt
dt dt
dt
( 41 )
Componentes de um vetor no
referencial cilíndrico.
Mecânica » Cinemática Vetorial
13
Definimos a componente normal da aceleração como a que é dada pelo termo
2
d 2ρ
d ϕ
aρ ≡ 2 − ρ
dt
dt
( 42 )
Definimos a aceleração centrípeta como a componente da aceleração dada por:
2
dϕ
acentrípeta ≡ −ρ
eρ
dt
( 43 )
Finalmente, em coordenadas cilíndricas, a aceleração se escreve como:
2
d 2ϕ d 2 z
d 2ρ
d ϕ d ρ d ϕ
+
+
a ≡ 2 − ρ
e
2
ρ
eϕ + 2 k
ρ
dt
dt 2
dt
dt dt
dt
exercícios resolvidos
( 44 )
Mecânica » Cinemática Vetorial
14
Exercícios resolvidos: Referencial Cartesiano Generalizado
Exercício
Dados os vetores A = Ax i + Ay j + Az k e B = Bx i + By j + Bz k , mostre que as componentes do produto
vetorial V = A × B são aquelas dadas pelas equações de Vetores (15).
Resolução
Para mostrar que as componentes do produto vetorial são aquelas dadas por a ⋅ b = a ⋅ b ⋅ cos θ,
devemos substituir os vetores A e B na equação de definição do produto vetorial V = A × B e realizar
as operações de multiplicação das componentes dos vetores envolvidos, ou seja,
V = A × B = Ax i + Ay j + Az k × Bx i + By j + Bz k
(
) (
)
( 45 )
Aplicando a propriedade distributiva das multiplicações, temos:
V = Ax i × Bx i + By j + Bz k + Ay j × Bx i + By j + Bz k + Az k × Bx i + By j + Bz k
= Ax i × Bx i + Ax i × By j + Ax i × Bz k + Ay j × Bx i + Ay j × By j + Ay j × Bz k +
+ Az k × Bx i + Az k × By j + Az k × Bz k .
(
)
(
)
(
)
( 46 )
Multiplicando (multiplicação
de escalares) os coeficientes e efetuando o produto vetorial dos
j
k
i
vetores de base , , , obtemos:
V = Ax Bx ( i × i ) + Ax By i × j + Ax Bz i × k + Ay Bx j × i + Ay By j × j + Ay Bz j × k
( 47 )
+ Az Bx k × i + Az By k × j + Az Bz k × k .
(
(
(
)
)
)
(
(
)
)
(
)
(
)
Considerando agora as propriedades resumidas em (4), podemos escrever:
V = Ax Bx ( 0 ) + Ax By k + Ax Bz − j + Ay Bx − k + Ay By ( 0 ) + Ay Bz ( i )
+ Az Bx j + Az By ( −i ) + Az Bz ( 0 ) .
()
()
( )
( )
(
)
( 48 )
Mecânica » Cinemática Vetorial
15
Desprezando os coeficientes multiplicados por zero, o produto vetorial é dado por:
V = Ay Bz − Az By i + [ − Ax Bz + Az Bx ] j + Ax By − Ay Bx k .
( 49 )
Invertendo a posição dos coeficientes de j, temos:
V = Ay Bz − Az By i + [ Az Bx − Ax Bz ] j + Ax By − Ay Bx k .
( 50 )
Essa expressão indica que as componentes de V são:
Vx = ( Ay Bz − Az By )
Vy = ( Az Bx − Ax Bz )
( 51 )
Vz = ( Ax By − Ay Bx )
Conforme definido em Vetores, equação (15).
Outra forma de se determinar o produto escalar entre dois vetores expressos analiticamente em
termos das componentes dos mesmos, é por meio do usodo determinante de uma matriz 3 × 3, ou
seja, o produto vetorial pode ser escrito nesse novo referencial, como:
i
j
k
Ay Az Ax Ay A Az V = A × B = det Ax Ay Az = det
i − det x
⋅ j + det
⋅k
By Bz
Bx By
Bx Bz
Bx By Bz
( 52 )
= ( Ay Bz − Az By ) i − ( Ax Bz − Az Bx ) j + ( Ax By − Ay Bx ) k
= ( Ay Bz − Az By ) i + ( Az Bx − Ax Bz ) j + ( Ax By − Ay Bx ) k
Mecânica » Cinemática Vetorial
16
Exercício
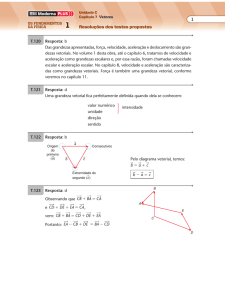
Determine o produto vetorial V = A × B , sendo A = 10i + 40 j e B = 30i − 50 j dois vetores pertencentes ao plano xy (pois as componentes z são nulas).
Resolução
Por meio do determinante, temos:
i
j
V = A × B = det 10 40
30 −50
k
0
0
40 0
10 0
10 40
= det
i − det
j + det
k
−50 0
30 0
30 −50
= 0 ⋅ i + 0 ⋅ j + ( −500 − 1200 ) k
( 53 )
Portanto,
V = −1700k
( 54 )
O produto vetorial V = A × B é ortogonal ao plano definido pelos vetores A e B; como eles estão
contidos no plano xy, o vetor V tem a direção do eixo z. No caso, V = −1700k , ou seja, o seu módulo
é 1.700 e o seu sentido, de acordo com o gráfico, é oposto ao sentido positivo do eixo 0z (portanto,
“penetrando” na folha do papel).
Vetores A e B pertencentes ao plano xy. O eixo
0z, nesse caso, está “saindo” do plano do papel
e é perpendicular a ele.
Mecânica » Cinemática Vetorial
17
Exercício
Dados os vetores c = 5i + 6 j e d = 8i − 5 j , determine:
a. o produto escalar c ⋅ d .
b. o ângulo θ entre c e d .
Resolução
a. Efetuando a Multiplicação escalar dos vetores c e d, tem-se:
c ⋅ d = 5i + 6 j ⋅ 8i − 5 j
= 5i ⋅ 8i − 5 j + 6 j ⋅ 8i − 5 j
= 40 i ⋅ i + 25 i ⋅ j + 48 j ⋅ i − 30 j ⋅ j
(
(
( )
)(
)
( )
)
(
)
( )
( )
Mas, ( i ⋅ i ) = ( j ⋅ j )= 1, pois, além de |i| = |j|, o ângulo entre eles é 0° e cos0° = 1
( i ⋅ i ) = ( j ⋅ j ) = 0, pois o ângulo entre eles é 90° e cos90° = 0.
Portanto:
c ⋅ d = 40 i ⋅ i + 25 i ⋅ j + 48 j ⋅ i − 30 j ⋅ j = 40 ⋅ 1 + 25 ⋅ 0 + 488 ⋅ 0 − 30 ⋅ 1 = 10
c ⋅ d = 10
( )
( )
( )
( 55 )
( )
( 56 )
b. Do produto escalar
c ⋅d
c ⋅ d = c·d·cosθ temos cos θ =
. O produto escalar c ⋅ d = 10 (determinado anteriormente);
c⋅d
c = 52 + 62 = 61 e d = 82 + ( −5 ) = 89 ; portanto,
c⋅d
10
cos θ =
=
= 0,136 → θ = arccos ( 0,136 ) = 82, 2°
c⋅d
61
89
2
(
)(
)
( 57 )
Mecânica » Cinemática Vetorial
18
Exercícios Resolvidos: Vetores Velocidade e Aceleração
em coordenadas cartesianas
Exercício
Uma partícula em movimento num referencial cartesiano ocupa posições P(x, y, z) com x = x(t),
y = y(t) e z = z(t). No caso em que as coordenadas variem com o tempo (em unidades do SI) de
acordo com as expressões:
x(t) = t²;
( 58 )
y(t) = 10 − 2t²;
z(t) = 0,
determine:
a. vetor posição da partícula em função do tempo;
b. as posições e os vetores posições nos instantes t = 0,1, 2 e 3 s;
c. equação da trajetória da partícula.
Resolução
a. O vetor posição mais geral possível, é dado por
r ( t ) = x ( t ) i + y ( t ) j + z ( t ) k
( 59 )
Substituindo as coordenadas em função do tempo, obtemos:
r ( t ) = [t ² ] i + [10 − 2t ² ] j
Como z(t) = 0, a partícula move-se no plano xy.
( 60 )
Mecânica » Cinemática Vetorial
19
b. A tabela mostra os vetores posições e as posições P(x, y, z) para os instantes solicitados:
t
Vetor posição
0
r ( 0 ) = 0 i + 10 j + 0k
1
r (1) = 1 i + 8 j + 0k
P1 (1, 8, 0)
2
r ( 2 ) = 4 i + 2 j + 0k
P2 (4, 2, 0)
3
r ( 3) = 9 i − 8 j + 0k
P3(9, −8, 0)
Posição P
P0 (0, 10, 0)
O gráfico ao lado esquematiza a trajetória num referencial cartesiano plano.
Ele mostra que os pontos P que a partícula ocupa pertencem a uma reta, ou seja, que a trajetória
da partícula é retilínea.
c. Nesse caso (movimento no plano), a equação da trajetória pode ser obtida eliminando-se o
parâmetro “t ” das equações x = t² e y = 10 − 2t². Como t² = x, substituindo-o em y temos:
y = 10 – 2(x),
que é a equação de uma reta no plano xy (Segmento em azul no gráfico).
( 61 )
Vetor posição em diferentes instantes de
tempo. O segmento em azul representa a
trajetória da partícula.
Mecânica » Cinemática Vetorial
20
Exercício
Considere o vetor posição dado por
r ( t ) = [t ² ] i + [10 − 2t ² ] j + [ 0] k
( 62 )
que descreve o movimento da partícula mencionada no Exercício Resolvido sobre Referencial
Cartesiano Generalizado . Com base nessas informações, determine:
a. O vetor velocidade da partícula em função do tempo;
b. O módulo da velocidade no instante t = 0.
Resolução
Vetor velocidade:
O vetor velocidade é obtido tomando-se a derivada de primeira ordem do vetor posição em
relação ao tempo:
2
2
d r ( t ) d ( t ) d (10 − 2t )
v (t ) =
=
i+
j
dt
dt
dt
( 63 )
Portanto,
v ( t ) = 2ti + ( −4t ) j = 2ti − 4t j
( 64 )
módulo do vetor velocidade instantânea
O módulo de um vetor cujas componentes sejam Vx, Vy e Vz pode ser determinado pela
expressão: V =
(Vx )
2
+ (Vy ) + (Vz ) .
2
2
No caso em tela, Vx = 2t , Vy = −4t e Vz = 0; logo, v ( t ) =
Portanto, para t = 0, a velocidade é v = 0.
( 2t )
2
+ ( −4t ) . Portanto, V ( t ) =
2
(
)
20 t (s; m/s).
Mecânica » Cinemática Vetorial
21
Exercícios Resolvidos: Vetor Aceleração
Exercício
Uma partícula move-se de tal forma que o vetor posição varia com o tempo da forma:
r ( t ) = 0i + [ 60t ] j + [80t − 5t ² ] k
( 65 )
Adotando o sistema de unidades SI, determinar:
a. a expressão cartesiana do vetor velocidade em função do tempo.
b. a aceleração da partícula no mesmo referencial.
Resolução
Conhecido o vetor posição r = r ( t ) tem-se que:
• O vetor velocidade
é a derivada de primeira ordem do vetor posição com respeito ao
dr
).
tempo ( v =
dt
• A aceleração é a derivada de primeira ordem, com respeito ao tempo, do vetor velocidade
dv
d2
(a =
) ou, analogamente, a derivada de segunda ordem do vetor posição (a = 2 ( r ) )
dt
dt
[derivar o vetor posição 2 vezes seguidas]. Assim, obtemos:
a. Para o vetor velocidade
d r (t )
v (t ) =
= ( 60 ) j + ( 80 − 10t ) k
dt
( 66 )
b. E para o vetor aceleração:
d v (t )
a (t ) =
= −10 k
dt
( 67 )
Mecânica » Cinemática Vetorial
22
Exercícios Resolvidos: Vetor posição e vetor velocidade
em Coordenadas Polares
Exercício
As expressões cartesianas dos vetores da base são dadas em (19). Notamos que os vetores da
base polar (eρ e eϕ) são perpendiculares entre si. Com o movimento da partícula, o ângulo φ muda
com o tempo. O mesmo ocorre com os vetores de base polares. Apesar de terem módulo igual a 1,
as suas direções variam com o tempo, pois φ = φ(t).
a. Mostre que
deρ
dt
=
dϕ
eϕ
dt
( 68 )
b. E que
d ( eϕ )
dt
Vetores da base
eρ e eϕ num ponto P do plano.
=−
dϕ
eρ
dt
Projeções cartesianas dos vetores da base.
( 69 )
Mecânica » Cinemática Vetorial
23
Resolução
di d j
Os vetores i e j são constantes em relação ao tempo: = = 0 . O argumento das funções
dt dt
cosφ e senφ varia com o tempo; logo, as suas derivadas em relação ao tempo são expressas como
o produto da derivada da função pela derivada do argumento. Assim,
deρ d ( cos ϕ ) d ( sen ϕ ) d ( cos ϕ ) d ϕ d ( sen ϕ ) d ϕ
j=
i+
=
j=
i+
( 70 )
dt
dt
dt
dt
dϕ
dt
dϕ
dϕ
dϕ dϕ
− sen ϕ dt i + cos ϕ dt j = dt − sen ϕi + cos ϕjj
O fator entre colchetes é a expressão cartesiana de eϕ. Portanto, conclui-se que,
deρ
dt
=
dϕ
eϕ
dt
( 71 )
Consideremos agora a derivada do versor eϕ em relação ao tempo. Com base na expressão (19)
e lembrando que os versores i e j são constantes no tempo, deduzimos que
deϕ
d ( sen ϕ ) d ( cos ϕ ) d ϕ
i+
j=
− cos ϕi − sen ϕj )
(
dt
dt
dt
dt
O último termo, de acordo com (19), é −eρ. Portanto,
=−
d ( eϕ )
dt
=−
dϕ
eρ
dt
( 72 )
( 73 )
Mecânica » Cinemática Vetorial
24
Exercício
O movimento de uma partícula é descrito, em coordenadas polares, pelas expressões:
ρ = 2 + cosφ
φ = π.t
( 74 )
em unidades do SI. A partir dos dados acima, determine:
• O vetor posição em coordenadas polares.
• A velocidade V ( t ) em coordenadas polares.
• Quais as componentes polares da velocidade?
Resolução
a. Vetor posição
Como ρ = 2 + cosφ e φ = π·t, obtemos
r = ( 2 + cos πt ) eρ
( 75 )
b. Vetor velocidade em coordenadas polares.
Por definição a velocidade é dada por:
d
d
d
V = ( 2 + cos πt ) eρ = ( 2 + cos πt ) eρ + ( 2 + cos πt ) eρ
dt
dt
dt
( 76 )
Efetuando as derivadas e utilizando o resultado do Exemplo 06, e lembrando que φ = πt, tem-se que
V = ( − π sen πt ) eρ + ( 2π + π cos πt ) eϕ
c. Componentes polares
De acordo com a definição das componentes polares, e da expressão acima, resulta que:
Vρ = −πsenπt(componente de V na direção radial)
Vφ = + (2π + πcosπt) (componente de V na direção polar)
( 77 )
( 78 )
As coordenadas polares, bem como
os vetores da base, variam com o
tempo durante o movimento.
Mecânica » Cinemática Vetorial
Exercícios Resolvidos: Vetor aceleração em Coordenadas
Polares e Cilíndricas
Exercício
Um satélite geoestacionário tem órbita circular de raio R concêntrica ao globo terrestre e tem
período igual ao da Terra, ou seja, completa uma volta no plano que contém o equador terrestre
em 24 horas.
dϕ
Adotando um sistema de coordenadas polares (ρ, φ) e considerando ω =
= velocidade angular
dt
do vetor posição do satélite, determinar (em coordenadas polares):
a. O vetor posição r
b. A velocidade V
c. A aceleração a
(b) Uso do referencial polar na descrição de movi(a) Referencial polar: definido pelas coordenadas polares e pelos mentos circulares adotando a origem do referencial
vetores da base.
de tal forma a fazê-lo coincidir com o centro da Terra.
25
Mecânica » Cinemática Vetorial
26
Resolução
O esquema da Figura (a) representa o movimento circular do satélite geoestacionário e as coordenadas polares. Na Figura (b) apresentamos o referencial polar, constituído de dois vetores característicos desse referencial.
a. Para um movimento circular,de raio fixo (ρ = R), o vetor posição é dado por:
r = ρ eρ = Reρ
( 79 )
Observe que r varia com o tempo, uma vez que o vetor da base eρ muda de direção no decorrer
do movimento.
b. A velocidade é a taxa de variação instantânea do vetor posição. Portanto,
dr d
deρ
d ( R)
dϕ
= ( Reρ ) =
v=
eρ + R
= 0+ R⋅
eϕ
dt dt
dt
dt
dt
Como, nesse caso,
dϕ
= ω , obtemos que a velocidade é dada por:
dt
v = ( ωR ) eϕ
( 80 )
( 81 )
Por definição, o vetor da base eϕ é tangencial à órbita. O módulo de V é V = ωR sendo, portanto,
constante, pois ω e R são invariáveis para o satélite geoestacionário.
c. A aceleração vetorial é a taxa de variação instantânea da velocidade:
d
d
dϕ
a = ( ωReϕ ) = ( ωR ) ( eϕ ) = ( ωR ) −
eρ = −ω2 Reρ
dt
dt
dt
( 82 )
Portanto, no movimento circular, a aceleração vetorial é dada por:
a = −ω2 Reρ
( 83 )
Mecânica » Cinemática Vetorial
Logo, o módulo da aceleração é a = ω2R; sua direção é radial, ou seja, da reta que passa pelo
centro da Terra e pelo satélite, e a aceleração é um vetor dirigido para o centro da órbita circular.
Por isso, essa aceleração é também denominada aceleração centrípeta.
27
Mecânica » Cinemática Vetorial
28
Como usar este ebook
Orientações gerais
Caro aluno, este ebook contém recursos interativos. Para prevenir problemas na utilização desses recursos, por favor acesse o arquivo
utilizando o Adobe Reader (gratuito) versão 9.0 ou mais recente.
Botões
Indica pop-ups com mais informações.
Ajuda (retorna a esta página).
Sinaliza um recurso midiático (animação, áudio etc.) que pode
estar incluído no ebook ou disponível online.
Créditos de produção deste ebook.
Indica que você acessará um outro trecho do material.
Quando terminar a leitura, use o botão correspondente ( )
para retornar ao ponto de origem.
Bons estudos!
Mecânica » Cinemática Vetorial
Créditos
Este ebook foi produzido pelo Centro de Ensino e Pesquisa Aplicada (CEPA), Instituto de Física da Universidade de São Paulo (USP).
Autoria: Gil da Costa Marques.
Revisão Técnica e Exercícios Resolvidos: Paulo Yamamura.
Coordenação de Produção: Beatriz Borges Casaro.
Revisão de Texto: Marina Keiko Tokumaru.
Projeto Gráfico e Editoração Eletrônica: Daniella de Romero Pecora, Leandro de Oliveira e Priscila Pesce Lopes de Oliveira.
Ilustração: Alexandre Rocha, Aline Antunes, Benson Chin, Camila Torrano, Celso Roberto Lourenço, João Costa, Lidia Yoshino,
Maurício Rheinlander Klein e Thiago A. M. S.
Animações: Celso Roberto Lourenço e Maurício Rheinlander Klein.
Fotografia: Jairo Gonçalves.
29