Electromagnetismo
(cap. 2. Magnetostática)
José Pinto da Cunha
universidade de coimbra
2016
2
Conteúdo
2 Magnetostática
2.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 A equação de continuidade . . . . . . . . . . . . . . . . . . . .
2.3 A lei de Ohm . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 O campo magnetostático . . . . . . . . . . . . . . . . . . . . .
2.4.1 A força de Lorentz . . . . . . . . . . . . . . . . . . . .
2.4.2 A lei de Biot-Savart . . . . . . . . . . . . . . . . . . . .
2.4.3 O potencial vector . . . . . . . . . . . . . . . . . . . .
2.4.4 Condições de fronteira do campo B . . . . . . . . . . .
2.5 Fluxo magnético e indutância . . . . . . . . . . . . . . . . . .
2.6 A energia magnetostática . . . . . . . . . . . . . . . . . . . . .
2.7 Expansão multipolar do potencial vector . . . . . . . . . . . .
2.8 Energia potencial de um dipolo magnético . . . . . . . . . . .
2.9 Meios magnéticos . . . . . . . . . . . . . . . . . . . . . . . . .
2.9.1 Descrição microscópica da magnetização . . . . . . . .
2.9.2 Magnetes permanentes - análise de uma barra magnética
2.9.3 Aplicações . . . . . . . . . . . . . . . . . . . . . . . . .
3
5
5
7
9
12
13
15
17
23
24
30
34
37
41
47
62
64
4
CONTEÚDO
Capı́tulo 2
Magnetostática
2.1
Introdução
No capı́tulo anterior analisaram-se os efeitos devidos a cargas estáticas. Vamos agora discutir os efeitos associados a cargas em movimento, em regime
estacionário - a magnetostática.
A corrente eléctrica, i, que percorre um fio filiforme define-se como a
carga que passa em determinado ponto por unidade de tempo, i = dq
.Se
dt
esta corrente se espraia por um volume e atravessa superfı́cies extensas é
conveniente definir também a densidade de fluxo de corrente ou simplesmente
densidade de corrente elétrica, j. A corrente que atravessa uma superfı́cie
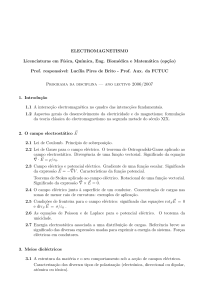
elementar ds é pois di = j · ds. A densidade de corrente é pois efetivamente
a corrente que passa num ponto por unidade de área transversal, j = dsdi⊥ v̂,
com ds⊥ = ds cos θ = ds · ̂, e tem o sentido da velocidade das cargas em
movimento, v̂, (ver fig. 2.1). Nos termos anteriores, a corrente (total) através
de uma determinada superfı́cie, S, é dada pelo fluxo de j,
i=
Z
S
j · ds
(2.1)
Em geral, a densidade de corrente é uma função da posição, j(r), (e eventualmente também do tempo). Da fig. 2.1 conclui-se que dq = ρds⊥ dℓ e, por
c j. pinto da cunha, electromagnetismo /magnetostática, universidade de coimbra, 2016.
5
6
CAPÍTULO 2. MAGNETOSTÁTICA
11111111
00000000
00000000
11111111
ds
ds
00000000
11111111
00000000
11111111
θ
00000000
11111111
00000000
11111111
00000000
11111111
ds
j
v
dl
j
Figura 2.1: A densidade de corrente é a carga que passa num ponto por unidade
dq
, onde ds⊥ = ds cos θ. Por consequência,
de tempo e de área transversal, j = dtds
⊥
j = ρv, onde ρ = dq/dτ e v é a velocidade das cargas em cada ponto.
conseguinte, j =
dq
ds⊥ dt
v̂ = ρ dℓ
v̂. Isto é,
dt
j = ρv
(2.2)
A densidade de corrente em cada ponto é pois igual à densidade das cargas
em movimento vezes a respectiva velocidade, em cada ponto.
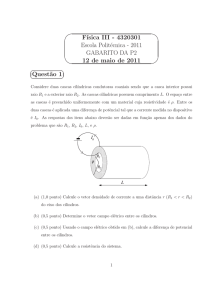
Se as cargas forem superficiais e se moverem apenas ao longo de uma
superfı́cie, nesse caso, a corrente é superficial, pelo que é útil definir também
a densidade superficial de corrente, como k = dℓdq
v̂, (ver fig. 2.2). Isto
⊥ dt
é, k designa a corrente que atravessa uma linha transversal traçada sobre a
superfı́cie em causa, por unidade de comprimento dessa linha. É evidente
que se σ for a densidade superficial de cargas em movimento, então k = σv,
pois dq = σdℓk dℓ⊥ (ver fig. 2.2). A corrente superficial total será, portanto,
i=
Z
kdℓ⊥
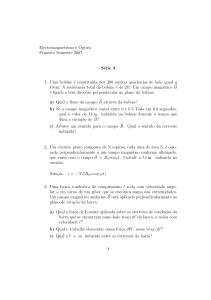
Importa também analisar a passagem de corrente por um fio fino, de
secção s (pequena mas não infinitesimal). Da fig. 2.3, concluı́mos que i = js,
(pois sendo fino o fio, j = const.), e, portanto, i dℓ = jsdℓ = j dτ , onde
dτ = sdℓ é um elemento de volume do fio. Pode-se portanto estabelecer
uma correspondência entre elementos de corrente lineares e de volume ou de
superfı́cie, já que
i dℓ = j dτ −→
Z
i dℓ ↔
Z
τ
j dτ
(2.3)
Se a corrente for superficial, espalhada pela área lateral s′ de um fio fino,
(ver fig. 2.3b)), então i = kℓ⊥ e, portanto, idℓ = kdℓ⊥ dℓ = kds′ . Nesse caso,
i dℓ = k ds′ −→
Z
i dℓ ↔
Z
S
k ds′
(2.4)
7
2.2. A EQUAÇÃO DE CONTINUIDADE
v
k
k
S
dl ⊥
dl
Figura 2.2: A densidade superficial de corrente é a carga que atravessa uma
linha marcada sobre a superfı́cie, por unidade de comprimento dessa linha e por
unidade de tempo, k = dℓdq
. Consequentemente, k = σv, onde σ = dq/ds e v é
⊥ dt
a velocidade das cargas ao longo da superfı́cie.
i
1111
0000
0000
1111
0000
1111
s
0000
1111
0000
1111
0000
1111
0000
1111
j
dl
a)
1111
0000
0000
1111
ds’
0000
1111
0000
1111
k
s’
i
b)
dl
Figura 2.3: A corrente num fio fino, de secção s, é i = js e portanto idℓ = jdτ .
b) Se a corrente for superficial idℓ = kds′ , onde ds′ é uma área da parede lateral
do fio.
onde s′ se refere à área de parede lateral do fio em causa.
2.2
A equação de continuidade
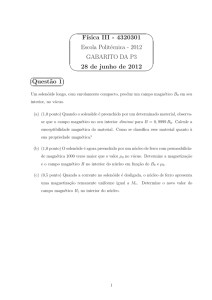
Seja uma região do espaço delimitada pela superfı́cie S da fig. 2.4, na qual
há uma carga eléctrica
q distribuı́da com uma densidade ρ. Através de S sai
H
a corrente i = S j · ds. Cada coulomb que sai através de S é um coulomb a
menos que fica dentro de S, i.e.,
I
dq
= i = j · ds
dt
S
(a derivada é negativa porque o fluxo que
sai é positivo, fig. 2.4). A carga
R
total que existe no volume é q = q(t) = τ ρ(r, t)dτ . Pelo teorema de GaussOstrogradsky, conclui-se pois que
−
−
I
Z
d Z
ρ(r, t) dτ = j · ds = ∇ · j dτ
dt τ
S
τ
8
CAPÍTULO 2. MAGNETOSTÁTICA
j
j
j
ρ
τ
j
S
j
Figura 2.4: Equação de continuidade. A carga eléctrica dentro do volume decresce
na mesma medida
em que o fluxo de j sai através da fronteira S, i.e., −dq = idt,
H
dq
ou seja, − dt = S j · ds.
ou seja,
Z (
τ
)
∂ρ(r, t)
+ ∇ · j dτ = 0
∂t
Como esta igualdade é válida independentemente do volume de integração,
então1 , necessariamente,
∂ρ
=∇·j
(2.5)
−
∂t
Esta equação de continuidade expressa de facto a lei de conservação da
carga eléctrica em cada ponto, sendo por isso uma equação com grande
relevância2 .
O regime estacionário define-se como aquele em que não há variação
explı́cita com o tempo das quantidades que descrevem a realidade fı́sica (e.g.,
pode haver movimento mas esse movimento é constante ad infinitum). Por
conseguinte, no regime estacionário, ∂t ρ = 0, e portanto, a eq. 2.5 fica
∇·j =0
(2.6)
Consequentemente, qualquer que seja a superfı́cie S que se considere, no
regime estacionário, tem-se
I
j · ds = 0
S
1
Supõe-se que as funções são bem comportadas em todo o volume.
A equação de continuidade expressa matematicamente uma lei geral de conservação
e aplica-se a qualquer densidade de fluxo (não apenas à carga eléctrica, mas também a
fluxos de massa, energia, etc...).
2
9
2.3. A LEI DE OHM
i2
i1
S
i3
Figura 2.5: Num circuito, em regime estacionário, a lei dos nodos, i1 = i2 + i3 ,
traduz a conservação da carga.
A lei dos nodos dos circuitos é uma consequência direta desta expressão.3
2.3
A lei de Ohm
Num condutor em equilı́brio eletrostática as cargas estão estáticas, por
definição. Se esse condutor estiver a ser percorrido por uma corrente, então
ele não está seguramente em equilı́brio eletrostático e o campo no seu interior não é de facto nulo. Se a corrente eléctrica que o percorre for constante
então esse condutor estará presumivelmente em condições estacionárias, mas
estas não devem ser confundidas com as condições estáticas ou do equilı́brio
eletrostática.
Se num ponto dentro do condutor o campo for E, então uma carga livre,
q, que aı́ se encontre é sujeita à força F = qE e acelera na direção da força.
Todavia, no seu movimento através do material, as cargas livres colidem
frequentemente com outras cargas do meio e, dessas colisões resulta uma
espécie de atrito, que cresce proporcionalmente à velocidade (como ocorre
num corpo que se move no ar). Em condições estacionárias, a velocidade
das cargas em movimento atinge um valor limite constante (ou velocidade
3
A lei dos nodos dos circuitos eléctricos é valida apenas em condições estacionárias.
Referindo-nos à fig. 2.5 tem-se,
I
Z
Z
Z
j · ds = 0 =
j · ds +
j · ds +
j · ds = −i1 + i2 + i3
S
S1
isto é, na fig. 2.5 i1 = i2 + i3 .
S2
S3
10
CAPÍTULO 2. MAGNETOSTÁTICA
terminal), que é proporcional à intensidade do campo.4 Visto que j = ρv,
então, em geral, no regime estacionário, é válida a lei de Ohm,
j = σE
(2.7)
onde σ é a condutividade do material. Esta é a forma local da lei de Ohm,
válida em cada ponto de um material.
O regime estacionário caracteriza-se pelo facto de as quantidades não
dependerem explicitamente do tempo. Assim, no regime estacionário,
∂t ρ = 0 → ∇ · j = 0 → ∇ · E = 0 → ρtotal = ǫ∇ · E = 0
Isto é, em regime estacionário, apesar de estar a passar corrente eléctrica
através de um condutor, a densidade total de carga é nula em todos os
pontos desse condutor. Isto quer dizer que, em condições estacionárias, há,
em cada ponto do condutor, tantas cargas positivas quantas as negativas,
mesmo que passe corrente. De facto, nessas condições, o que se passa é que
e em cada ponto em cada instante, há uma carga que parte e outra igual
que aı́ chega. No caso particular em que a corrente percorre um fio fino, que
se estende, por hipótese, ao longo do eixo x, então no regime estacionário,
∇ · E = 0 = ∂x E = 0 ⇒ E = constante. Ou seja, o campo elétrico
é constante no interior de qualquer condutor percorrido por uma corrente
elétrica estacionária.5 Isto significa que, se um fio tiver secção transversal s,
então a diferença de potencial entre as extremidades de um troço de fio de
comprimento ℓ é ∆V = sσℓ i, onde i é a corrente.
4
A equação de movimento de uma carga é da forma ma = F = qE − bv, onde m é a
massa, v é a velocidade, a = dv/dt é a aceleração e b é uma constante proporcional ao
”atrito” resultante das colisões entre esta carga e as demais partı́culas do meio em que se
b
move. A solução desta equação é da forma v(t) = v0 e− m t + qE
m . Passada a fase transiente,
a primeira parcela extingue-se exponencialmente e e fica apenas, no regime estacionário, a
velocidade limite, v = qE
m . Ou seja, no regime estacionário, v ∝ E e portanto j = ρv ∝ E
e, portanto, j = σE, que é a lei de Ohm em cada ponto.
5
A lei de Ohm na forma não local relaciona a diferença de potencial entre dois pontos
de um fio fino. Como, em regime estacionário, E é constante dentro do condutor, se o fio
tiver comprimento ℓ e secção s, então
Z b
jℓ
E · dℓ = Eℓ =
Va − Vb =
= Ri
σ
a
onde R = σ1 sℓ é a resistência desse troço de fio. Esta é a forma não local da lei de Ohm.
A resistência de um material cresce portanto proporcionalmente ao seu comprimento e
inversamente à secção (ver fig. 2.3). O quociente σ1 é a resistividade do material.
11
2.3. A LEI DE OHM
Tabela 2.1: Propriedades eléctricas de alguns materiais: condutividade eléctrica,
σ, e resistividade, ρ = σ1 , em unidades SI.
material
prata
cobre
ouro
alumı́nio
ferro
ferrite (NiZ)
água do mar
terra (solo)
sı́licio
água pura
vidro
condutividade(✵/m)
6.29 × 107
5.95 × 107
4.52 × 107
3.77 × 107
1.04 × 107
∼ 10−3 − 10−5
4
−3
∼ 10
4.0 × 10−4
4.0 × 10−6
∼ 10−14
resistividade (Ω.m)
1.59 × 10−8
1.68 × 10−8
2.21 × 10−8
2.65 × 10−8
9.61 × 10−8
∼ 103 − 105
0.25
∼ 103
2.5 × 103
2.5 × 105
∼ 1014
Sempre que o campo na superfı́cie exterior a um condutor se altere, o
campo dentro do condutor também se vai alterar. Haverá então, momentaneamente, uma breve situação não estacionária, mas é tão breve que geralmente pode ser ignorada.6
Resulta das considerações anteriores que um condutor no qual circula
6
Num condutor em regime estacionário o campo, E, é constante e a densidade total
é ρ = 0 em todos os pontos do interior. Se as condições mudarem haverá uma transição
para o novo regime, até que novo equilı́brio se (r)estabeleça. A duração deste transiente é
muito curta e pode ser facilmente estimada. Durante a fase transiente, tem-se dentro do
condutor,
ρ
−∂t ρ = ∇ · j ≈ σ∇ · E = σ
ǫ
considerando que j ≈ σE apesar de o regime não ser estacionário. Visto que ρtotal ≡
σ
− σǫ t
. Ou
ρ = ǫ∇ · E, tem-se a equação diferencial, dρ
dt + ǫ ρ = 0, cuja solução é ρ(t) = e
seja, a densidade total de cargas dentro do material, ρ, tende exponencialmente para zero,
com uma constante temporal κ = σǫ . O tempo caracterı́stico da fase transiente até se
restabelecer o (novo) regime estacionário é pois da ordem de t0 = κ−1 ∼ σǫ . Nos bons
condutores, σ ∼ 107 ✵/m e, portanto, t0 ∼ 10−18 segundos. Podemos por isso assumir
na prática que, em condições normais, os condutores estão sempre em regime estacionário
(ou eventualmente em equilı́brio eletrostático, se não houver correntes). Só se a frequência
>
de variação dos campos e das correntes for muito elevada, (f ∼ 1 GHz), é que esta
aproximação deixa de ser válida.
12
CAPÍTULO 2. MAGNETOSTÁTICA
uma certa corrente: i) não está em equilı́brio eletrostático; ii) que o campo
no interior não é nulo e que, portanto, iii) o seu potencial não é constante
em todo o condutor.7
2.4
O campo magnetostático
Como vimos atrás, cargas estáticas criam campos eletrostáticos no espaço
envolvente. Porém, se essas mesmas cargas se moverem com uma certa velocidade constante em relação a determinado sistema de referência, criam
nesse referencial dois campos: i) um campo eletrostático, semelhante ao que
é criado pelas cargas em repouso (a diferença só se nota para velocidades
próximas da da luz) e ii) um campo magnetostático,8 B.
Todavia, como facilmente se compreende, para um observador que acompanhe as cargas no seu movimento, estas permanecem estáticas e portanto
ele não presencia campo magnético algum. O campo magnético associado ao
movimento das cargas há de pois ser um efeito que se deve poder descrever
pela transformação entre os dois sistemas de observação. Esta fenomenologia
pode aliás ser apontada como uma das motivações iniciais que haveriam de
conduzir ao desenvolvimento da teoria da relatividade.
Com efeito, pode-se mostrar que, de acordo com as leis de transformação
relativista entre o referencial das cargas em repouso e outro referencial no qual
estas se movem e formam uma corrente, o campo eletrostático no referencial
das cargas em repouso se transforma num campo eletrostático e num campo
magnetostático que não estava no referencial de repouso. Mas não faremos
aqui essa demonstração.
Há também certos materiais ditos magnéticos que podem criar campos magnéticos; em particular os magnetes permanentes, que criam campos
7
Na análise de circuitos eléctricos considera-se normalmente que os fios de ligação estão
a potenciais bem definidos e que só há diferenças de potencial nas resistências e demais
impedâncias, visto que estas têm evidentemente condutividades muito baixas e certamente
muito mais baixas que as dos condutores (ver tabela 2.1).
8
O campo B também é designado como campo de indução magnética ou, por vezes,
campo de densidade de fluxo magnético, mas, por simplicidade de linguagem, vamos-lhe
chamar simplesmente campo magnético(!)
Tradicionalmente o termo “campo magnético” designa o campo H (ver § 2.9). Chamar
campo magnético a B é portanto uma espécie de infracção - mas é assumida! Designaremos
por isso o campo H, simplesmente “campo H” ou campo magnético H, não havendo pois
ambiguidade. (cf. D. Griffiths, ”Introduction to Electrodynamics”, 3rd ed., p. 271.
2.4. O CAMPO MAGNETOSTÁTICO
13
magnéticos sem que esteja envolvida nenhuma corrente. Deixaremos essa
discussão para o § 2.9.
A metodologia que seguimos para estudar o campo magnético e suas
caracterı́sticas parte de uma base empı́rica, observacional, alicerçada na lei
de Biot-Savart. Mas podı́amos também começar esta discussão a partir da
transformação relativista acima referida, se falássemos dela.
Neste capı́tulo, analisamos o campo criado por cargas em movimento uniforme, em regime estacionário. De facto, se as cargas eléctricas tiverem velocidade variável, i.e., se forem aceleradas, então os campos que elas criam são
também variáveis no tempo. Nessa circunstância, como veremos, os campos
E e B estão acoplados e formam efetivamente um campo electromagnético,
cujas variações se propagam com velocidade finita, constituindo ondas eletromagnéticas. Mas esse será assunto para o capı́tulo sobre electrodinâmica; por
ora, considera-se apenas o regime estacionário.
2.4.1
A força de Lorentz
A observação mostra que sobre uma carga, q, que se move com velocidade,
v, na presença de um campo magnético, B, atua uma força (magnética),
F = qv × B
(2.8)
Esta força é conhecida como força de Lorentz. Se nessa região também
existir campo eléctrico, E, a carga também interage com ele, pelo que, mais
geralmente, a força de Lorentz sobre a carga q é
F = qE + qv × B
(2.9)
Decorre do que foi dito que um fio filiforme percorrido por uma corrente
i, sito numa região em que há um campo magnético, B, é sujeito a uma
força magnética. Cada elemento diferencial do fio, de comprimento dℓ, tem
cargas dq a moverem-se com velocidade v = dℓ
. Sobre esse elemento do fio
dt
atua portanto a força,
dF = dq
dℓ
× B = i dℓ × B
dt
(2.10)
Esta expressão é conhecida como força de Laplace, apesar de ser uma
manifestação direta da força de Lorentz. A força que atua sobre um fio
14
CAPÍTULO 2. MAGNETOSTÁTICA
deR comprimento ℓ percorrido pela corrente i é pois, evidentemente, F =
i dℓ × B, onde o integral se estende a todo o comprimento do fio.
É de notar que a força magnética nunca realiza trabalho sobre as cargas.
De facto, ao longo de qualquer deslocamento infinitesimal dr, o trabalho
sobre uma carga dq, esteja ela integrada ou não numa corrente, é
dW = dF · dr = dq(
dr
× B) · dr = 0
dt
já que (dr × B) ⊥ dr.
Interessa também analisar nesta introdução a força de interação entre
duas correntes paralelas e rectilı́neas. As duas correntes eléctricas interagem
porque o campo criado por uma interage com a outra e vice-versa:- uma
corrente, i1 , cria um campo magnético, B 1 , em seu redor que interage com
a outra corrente, i2 , nos termos da força de Laplace da eq. 2.10. Entre dois
fios filiformes, paralelos, rectilı́neos, muito longos, à distância x um do outro,
percorridos por correntes i1 e i2 , respetivamente, surge assim, (ver eq. 2.13),
a força de interação por unidade de comprimento,
F/ℓ =
µ 0 i1 i2
2πx
Esta força é atrativa se as correntes tiverem o mesmo sentido e repulsiva se
forem de sentidos contrários, de acordo com a eq. 2.10. A unidade de corrente
elétrica é definida no sistema SI de unidades com base nesta força entre dois
fios.
Definição. Um ampere é a corrente que percorre dois fios paralelos, à
distância de um metro um do outro, no vazio, quando a força entre eles
é 2 × 10−7 newton/metro.9
Historicamente, foi a partir da observação das forças magnéticas entre
circuitos eléctricos, que se inferiu quer a existência quer a estrutura do campo
magnético, em particular a lei de Biot-Savart do campo magnético criado por
uma corrente eléctrica.
9
Para além disso, visto que 1A = 1C/s, a unidade de carga eléctrica assenta na definição
do ampere : 1 coulomb é 1 ampere × 1 segundo.
15
2.4. O CAMPO MAGNETOSTÁTICO
^r"
r
r"
dl
d B(r)
r’
i
dl
Figura 2.6: Um elemento de corrente idℓ cria um campo dB(r) que é perpendicular a dℓ e a r ′′ em cada ponto, de acordo com a lei de Biot-Savart.
2.4.2
A lei de Biot-Savart
A lei de Biot-Savart descreve o campo de indução magnética criado no vazio
por um elemento de comprimento dℓ de um fio fino percorrido por uma
corrente i (ver fig. 2.6),
dB(r) =
µ0 idℓ × r̂′′
,
4π r′′ 2
com r ′′ = r − r ′
(2.11)
A constante de proporcionalidade, µ0 ≈ 4π × 10−7 NA2 , é a permeabilidade
magnética do vazio e caracteriza as propriedades do meio envolvente, neste
caso as do vazio.10 A lei de Biot-Savart (1820) tem, tal como a lei de Coulomb,
uma base empı́rica e assim a tomaremos.
É evidente a semelhança entre a lei de Coulomb da eletrostática e a lei
de Biot-Savart; nesta, tal como naquela, o campo varia com o quadrado
da distância e é diretamente proporcional às fontes que o criam (i.e., às
correntes). Isto significa que o princı́pio de sobreposição também se aplica
ao campo magnetostático. Todavia, como se infere pelo carácter vectorial da
lei de Biot-Savart, a magnetostática é um pouco mais complicada do que a
eletrostática.
O campo criado por um circuito eléctrico constituı́do por um fio filiforme,
necessariamente fechado, é dado pelo integral da eq. 2.11, estendido sobre
10
No sistema SI de unidades o campo B mede-se em tesla, (T). É também muito utilizada
a unidade gauss, (G), por ser mais prática, sendo a conversão 1T = 104 G. O campo
magnético terrestre à superfı́cie é da ordem de 0.5 gauss, na nossa latitude.
16
CAPÍTULO 2. MAGNETOSTÁTICA
todo o circuito, C, (ver fig. 2.6),
µ0 i I dℓ × r̂′′
B(r) =
4π C r′′2
(2.12)
O campo criado por um fio rectilı́neo e infinito
O campo magnético criado num certo ponto por um fio fino, rectilı́neo e
infinito, percorrido por uma corrente, i, calculado por integração da lei de
Biot-Savart é a aplicação mais simples da eq. 2.12. Cada elemento infinitesimal de comprimento, dℓ, origina um campo infinitesimal dB. No plano
da figura, (ver fig. 2.7), dℓ × r̂′′ = dℓ cos θ ê⊗ mas, dada a simetria axial,
imediatamente se constata que dℓ × r̂′′ = dℓ cos θ ϕ̂. A geometria diz-nos
que cos θ = r̺′′ , que tan θ = ℓ+b
e que, portanto, dℓ = ̺ sec2 θ dθ. Por
̺
conseguinte, integrando para toda a extensão do fio,
B(r) =
µ0 i Z θ2
cos θ dθ
ϕ̂
4π̺
θ1
No limite em que o comprimento do fio tende para infinito, θ1 → − π2 e
θ2 → + π2 e portanto,
µ0 i
ϕ̂
(2.13)
B=
2π̺
Esta equação foi obtida primeiramente por Biot e Savart (1820) quando investigavam a força de interação entre duas correntes e está associada à descoberta da lei de Biot-Savart, (eq. 2.11).
As linhas do campo B previstas pela equação anterior são circunferências
concêntricas, centradas no fio (ver fig. 2.7). As linhas do campo B são pois
linhas que se fecham sobre si próprias, nunca emergindo de ou convergindo
para um ponto. Trata-se portanto de um campo solenoidal, em que ∇·B = 0
(ver fig. 1.17).
Nos termos do teorema de Helmholtz (§ 1.8), a divergência e o rotacional
definem o campo. Consequentemente, como ∇ · B = 0 em qualquer ponto,
então tem que se concluir que o rotacional de B se deve relacionar com as
correntes que causam B e que haverá pelo menos algum ponto em que não
é nulo (se divergência e rotacional fossem ambos nulos não haveria campo).
Com efeito, dado que as linhas de campo são circunferências na vizinhança
de um fio, a circulação de B numa circunferência dessa vizinhança, dΓ =
(∇ × B) · ds, deve ser proporcional a B e portanto a i. Ou seja, dado
17
2.4. O CAMPO MAGNETOSTÁTICO
y
b
ρ
θ1 θ θ2
dB
z^
x
r"
dl
i
^
ϕ
^
ρ
B
i
z
y
i
x ϕ ρ
b)
a)
B
c)
Figura 2.7: Campo magnético de um fio rectilı́neo percorrido pela corrente i.
a) análise de um troço de fio de comprimento ℓ; b) coordenadas e vectores; c)
representações das linhas do campo magnético criado pela corrente.
z
i
dl
r’
r"
dB(r)
r
y
x
Figura 2.8: O campo infinitesimal, dB, criado por um elemento de corrente idℓ
num ponto r. Os vectores r, r ′ e r ′′ referem-se às posições do ponto, do elemento
do circuito e à posição relativa r ′′ = r − r ′ , respectivamente.
que a corrente é filiforme, i = j · ds, e portanto (∇ × B) ∝ j; de facto
(∇ × B) = µ0 j, onde a constante de proporcionalidade µ0 caracteriza as
propriedades do meio envolvente - é a permeabilidade do vazio.
Mostra-se a seguir que o campo magnetostático é de facto solenoidal,
∇ · B = 0, e que e que ∇ × B = µ0 j, onde j é a densidade de corrente nesse
ponto. A estrutura do campo magnético é portanto distinta da do campo
magnetostático.
2.4.3
O potencial vector
O caso mais geral em que as correntes se distribuem num certo volume (não
estão confinadas a um fio fino), deve ser tratado fazendo corresponder idℓ →
18
CAPÍTULO 2. MAGNETOSTÁTICA
jdτ , (ver eq. 2.3).11 A eq. 2.11 fica então dB(r) =
obtém-se integrando sobre o volume,
µ0
4π
j (r ′ )×r̂′′ O campo total
r ′′2
µ0 Z j(r ′ ) × r̂′′ ′
B(r) =
dτ
4π τ
r′′2
(2.14)
onde r ′′ = r − r ′ , com r ′′ = r′′ r̂′′ . Podemos reescrever a eq. 2.14, partindo
da igualdade vectorial,12
j(r ′ )
∇×
r′′
!
1
1
= ∇ ′′ × j + ′′ ∇ × j
r
r
(2.15)
Pelo facto de r e r ′ serem variáveis manifestamente independentes, como
∇ ≡ (∂x , ∂y , ∂z ) e j = j(r ′ ), então ∇ × j = 0. Consequentemente, (ver
§ 1.5.3; eq. 1.49),
j(r ′ )
∇×
r′′
!
=∇
r̂′′
1
×
j
=
−
×j
r′′
r′′2
(2.16)
Com base nos argumentos anteriores podemos dar à eq. 2.14 a forma13
Z
j(r ′ ) ′
µ0
∇×
dτ
B(r) =
4π
r′′
τ
Ou seja,
B =∇×A
com
A(r) =
(2.18)
µ0 Z j(r ′ ) ′
dτ + const
4π τ r′′
(2.19)
R k×r̂′′ ′
µ0
Se as correntes fossem superficiais seria idℓ = kds e portanto B = 4π
ds .
S r ′′2
12
Se f for escalar e A vectorial, ∇ × (f A) = ∇f × A + f ∇ × A, (ver apêndice A).
13
Repare-se no paralelismo com o campo eletrostático de uma distribuiçãoR de cargas com
′′
1
ρ(r ′ ) rr̂′′2 dτ ′ ;
densidade ρ, espalhada num volume τ , (ver § 1.5.3): como E(r) = 4πǫ
τ
0
′′
como ∇ r1′′ = − rr̂′′2 (ver eq. 1.34); e visto que r e r ′ são variáveis independentes, que
R
′
∇ ≡ (∂ , ∂ , ∂ ) e que ρ = ρ(r ′ ), então E(r) = 1 ∇ ρ(r ) dτ ′ = −∇V , onde
11
x
y
z
4πǫ0
V (r) =
1
4πǫ0
Z
τ
τ
r ′′
ρ(r ′ ) ′
dτ + const
r′′
(2.17)
2.4. O CAMPO MAGNETOSTÁTICO
19
O vector A é o potencial vector da distribuição de correntes e corresponde
ao potencial eletrostático (ou potencial escalar ) de uma distribuição de cargas.
Uma consequência direta da eq. 2.18, que advém da identidade vectorial
∇ · (∇ × A) = 0, (ver apêndice A), é que, independentemente de quais sejam
as distribuições de correntes,
∇·B =0
(2.20)
Isto é, o campo magnetostático é um campo solenoidal em cada ponto, sendo
esta lei conhecida como lei de Gauss da magnetostática ou também segunda
equação de Maxwell.
Escolha de gauge
Se adicionarmos ao potencial vector da eq. 2.19 o gradiente de uma função
qualquer obtemos ainda o mesmo campo fı́sico, B, já que pois ∀f : ∇×∇f =
0. Por conseguinte, a expressão mais geral de A é,
A(r) =
µ0 Z j(r ′ ) ′
dτ + ∇f
4π τ r′′
(2.21)
onde f é uma função bem comportada, mas arbitrária. Ou seja, assim como o
potencial escalar, V , é sempre definido a menos de uma constante arbitrária,
pois E = −∇V = −∇(V +const.), assim também o potencial vector é sempre
definido a menos do gradiente de uma função arbitrária, bem comportada,
pois B = ∇ × (A + ∇f ) = ∇ × A.
Conclui-se assim que é intrı́nseca à teoria a liberdade de adicionar um
gradiente ao potencial vector, sem que com isso se alterem as propriedades
do campo fı́sico, B. Esta liberdade permite que se escolham algumas caracterı́sticas do potencial vector. Por exemplo, podemos considerar para todos
os efeitos, e sem perda de generalidade, que o potencial vector tem divergência
nula em todos os pontos. Com efeito, se A′ for, por hipótese, um potencial
com ∇ · A′ 6= 0, então adicionando a A′ o gradiente de uma função, f , tal
que A = A′ + ∇f , obtém-se
∇ · A = ∇ · A′ + ∇2 f
Se f for escolhida como solução da equação ∇2 f = −∇ · A′ então ∇ · A = 0,
20
CAPÍTULO 2. MAGNETOSTÁTICA
(i.e., A é solenoidal).14 Em qualquer caso, o campo, B = ∇ × A, é alheio
à questão da escolha arbitrária de f , obtendo-se as mesmas soluções fı́sicas
para o campo B, independentemente de f .
Conforme o teorema de Helmholtz, para definir A são necessários a divergência e o rotacional; a equação B = ∇ × A fixa o rotacional de A mas
nada diz quanto à sua divergência e podemos por isso fixá-la como for mais
conveniente (tal como se escolhem as coordenadas mais adequadas para descrever um problema). Esta liberdade de escolha da divergência do potencial
A, é conhecida como escolha de gauge ou de padrão. No chamado gauge de
Coulomb faz-se
∇·A=0
(2.22)
Aplicando a divergência à eq. 2.21, dado que r e r ′ são variáveis independentes, tem-se
!
µ0 Z
j(r ′ )
∇ · A(r) =
dτ ′ + ∇2 f
∇·
′′
4π τ
r
(2.23)
Se a divergência fosse em ordem às variáveis r ′ poder-se-ia aplicar aqui o
teorema de Gauss. Contudo, como j = j(r ′ ) e r ′′ = r − r ′ , então ∂x r ′′ =
−∂x′ r ′′ , etc... e ∇ · j(r ′ ) = 0 e podemos escrever
j(r ′ )
∇·
r′′
!
!
∇′ · j
j(r ′ )
= −∇ ·
+
r′′
r′′
′
onde ∇ ≡ (∂x , ∂y , ∂z ) mas ∇′ ≡ (∂x′ , ∂y′ , ∂z′ ), i.e., ∇′ opera sobre as variáveis
r′.
No regime estacionário ∇′ · j(r ′ ) = 0 e o integral de volume da eq. 2.23
converte-se num integral sobre a superfı́cie, através do teorema de GaussOstrogradsky, ficando
µ0 I j · ds
∇ · A(r) =
+ ∇2 f
4π S r′′
onde S é a superfı́cie do volume em que há correntes. Todavia, o integral de
volume da eq. 2.23 pode de facto ser estendido para além da região em que
A função f que torna solenoidal um potencial A′ é solução da equação ∇2 f = −∇·A′ .
R ∇·A′
1
Trata-se de uma equação de Poisson, cuja solução
é f = 4π
r dτ ; (veja-se que a
τ
R
ρ
′
1
equação ∇2 V = − ρǫ tem como solução V = 4πǫ
dτ
).
Se
A
for
bem comportada f
τ r
existe e é única (teorema da unicidade).
14
2.4. O CAMPO MAGNETOSTÁTICO
21
há correntes e incluir todo o espaço, pois j = 0 em todos os pontos em que
não há correntes. Mas então isso significa (supondo que as correntes estão
numa região finita) que j = 0 em todos os pontos da superfı́cie S do integral
anterior e que ele é nulo. Portanto, no regime estacionário,
∇ · A(r) = ∇2 f
A escolha da condição ∇ · A = 0 implica portanto que ∇ · (∇f ) = 0, i.e.,
que o gradiente, ∇f , não diverge de nenhum ponto do espaço. Ademais,
∇f = constante em infinito, tal como A, já que o infinito está por definição
equidistante de qualquer ponto da região finita onde há correntes.15 Por
consequência, ∇f = constante em qualquer ponto do espaço e, portanto, a
eq. 2.21 fica,
µ0 Z j(r ′ ) ′
A(r) =
dτ + const.
(2.24)
4π τ r′′
Em suma, em condições estacionárias, o potencial vector está definido em
qualquer ponto a menos de uma constante, tal como o potencial escalar. Essa
constante pode em geral ser ignorada, fazendo o potencial nulo no infinito.
O regime estacionário
A equação 2.24 é formalmente semelhante à expressão do potencial eletrostático, considerando per se cada uma das componentes cartesianas do
vector A. Visto que a expressão 2.17 é a solução da equação de Poisson, ∇2 V = − ǫρ0 , então também as componentes do potencial vector,
A = Ax x̂ + Ay ŷ + Az ẑ, são soluções das equações,
2
∇ Ax = −µ0 jx
∇2 Ay = −µ0 jy
∇2 Az = −µ0 jz
(2.25)
as quais se podem exprimir numa única equação vectorial,
∇2 A = −µ0 j
15
(2.26)
Uma função que é constante em todos os pontos da fronteira do seu domı́nio e que
não diverge em nenhum ponto, não tem qualquer máximo ou mı́nimo e, portanto, só pode
ser constante e igual ao valor na fronteira.
22
CAPÍTULO 2. MAGNETOSTÁTICA
Esta equação diz-nos que, em regime estacionário, o potencial vector satisfaz
a equação de Poisson em cada ponto.
As equações anteriores têm grande relevância para o cálculo dos campos
magnetostáticos. Com efeito, se forem conhecidas as correntes e as condições
de fronteira nos limites do domı́nio da função A, em princı́pio podemos
integrar a equação diferencial (vectorial) 2.26 e calcular a função A. O
campo B obtém-se então diretamente, derivando A, como B = ∇ × A. O
potencial vector está portanto para a magnetostática tal como o potencial V
está para a eletrostática.
Os problemas mais complicados da magnetostática, tal como os da eletrostática, resolvem-se integrando numericamente a equação de Poisson. Todavia, no caso do potencial A falamos agora de três equações diferenciais,
uma para cada componente do vector. Estas equações estão geralmente
acopladas por via das condições de fronteira do campo, na forma de condições
fronteira de Neumann (ver § 1.7 e § 2.9.2). Isto significa que em geral
um problema de magnetostática é deveras mais complicado que um de eletrostática.16
A lei de Ampère
Considerando a identidade vectorial, ∇ × ∇ × A = ∇(∇ · A) − ∇2 A, (ver
apêndice A), e a eq. 2.26 do regime estacionário, podemos exprimir o rotacional do campo B na forma,
∇ × B = µo j + ∇(∇ · A)
Todavia, como no gauge de Coulomb A solenoidal, ∇ · A = 0, então
∇ × B = µ0 j
(2.27)
Esta é a forma local da lei de Ampère e é válida para qualquer distribuição
de correntes, no regime estacionário. É também conhecida como quarta
equação de Maxwell.
16
Por ser matematicamente mais simples, por vezes calcula-se o campo B recorrendo
a um potencial escalar, Λ, que apenas pode ser definido nas regiões sem correntes, onde
j = 0 e, portanto, ∇ × B = 0. Nesse caso pode-se escrever B = ∇Λ, sendo Λ uma função
que satisfaz a equação de Laplace, ∇2 Λ = 0, tal como na eletrostática. As condições de
fronteira são contudo mais complicadas que na eletrostática. Todavia, não trataremos de
aplicar essas técnicas.
23
2.4. O CAMPO MAGNETOSTÁTICO
Concluı́mos pois, em suma, que as equações diferenciais do campo magnetostático são
(
∇·B =0
(2.28)
∇ × B = µ0 j
Estas equações são suficientes para definir o campo, nos termos do teorema
de Helmholtz.
As equações integrais do campo B, correspondentes às equações diferenciais 2.28, obtêm-se aplicando os teoremas de Gauss-Ostrogradsky e Stokes,
respectivamente. De imediato se conclui que,17
( H
B · ds = 0
HS
(lei de Gauss)
C B · dℓ = µ0 i (lei de Ampère)
(2.29)
Estas equações dizem-nos que: i) o fluxo total do campo B através de uma
superfı́cie arbitrária fechada é sempre nulo e que, ii) a circulação do campo
B ao longo de um percurso fechado arbitrário é igual à soma de todas as
correntes que atravessem a área abraçada por esse contorno, a multiplicar
pela permeabilidade do vazio. A lei de Ampère é muito útil no cálculo do
campo magnetostático em situações que, pela sua elevada simetria, permitam antecipar algumas caracterı́sticas do campo, B, e extrai-lo a priori do
integral da eq. 2.29b, (à semelhança da lei de Gauss da eletrostática com o
campo E).
2.4.4
Condições de fronteira do campo B
Apesar de suficientes, nas equações locais do campo, 2.28, não têm qualquer
referência a correntes superficiais. Havendo tais correntes o seu efeito não
está portanto contemplado nessas equações, sendo necessário considerar explicitamente as condições de fronteira, em todas as superfı́cies em que elas
existam. Com efeito, em superfı́cies em que haja descontinuidades do campo
B, as equações 2.28 não se aplicam e é necessário considerar as condições de
fronteira de B.
17
No caso da lei de Ampère,
I
Z
Z
B · dℓ =
∇ × B · ds = µ0
j · ds = µ0 i
C
S
S
onde i é a corrente total que atravessa a superfı́cie com contorno, C.
24
CAPÍTULO 2. MAGNETOSTÁTICA
Seja a superfı́cie de descontinuidade, Ψ, da figura 2.9, percorrida por uma
corrente superficial de densidade k = dℓdi⊥ . As eqs. 2.28 não são válidas em
pontos da superfı́cie, mas podemos aplicar as equações integrais, 2.29, em
volumes e superfı́cies da região de Ψ. Considerando um percurso C que
cruza a superfı́cie em dois pontos, como representado na fig. 2.9, no limite
em que ele contacta a superfı́cie, tem-se
lim
I
h→0 C
B · dℓ = µ0
X
i = µ0 kℓ⊥
Ora, como se vê na fig. 2.9, ℓ⊥ = ℓ · (k̂ × n̂), então
(B + − B − ) · ℓ̂ℓ = µ0 k(k̂ × n̂) · ℓ̂ℓ
onde B + e B − são os limites do campo, do lado da superfı́cie para onde
aponta n̂ e do lado oposto, respectivamente (ver fig. 2.9). Por conseguinte,
como ℓ é qualquer, sem qualquer relação com B, então, necessariamente,
B + − B − = µ0 k(k̂ × n̂). Ou seja, como n̂ × (k̂ × n̂) = k̂, então
n̂ × (B + − B − ) = µ0 k
(2.30)
Por outro lado, aplicando a lei de Gauss na vizinhança da superfı́cie Ψ
(ver fig. 2.10), tem-se
lim
I
h→0 S
B · ds = n̂ · (B + − B − ) = 0
As equações que descrevem o campo magnetostático, incluindo as respectivas condições de fronteira em todas as superfı́cies onde existam correntes
superficiais, são pois
(
2.5
∇·B =0
∇ × B = µ0 j
(
e
divS B = n̂ · (B + − B − ) = 0
rotS B = n̂ × (B + − B − ) = µ0 k
(2.31)
Fluxo magnético e indutância
O fluxo do campo magnético, B, através de um elemento de superfı́cie ds é
definido como dΦ = B · ds. O fluxo através de uma superfı́cie, S, é pois
Φ=
Z
S
B · ds =
Z
S
(∇ × A) · ds
25
2.5. FLUXO MAGNÉTICO E INDUTÂNCIA
B+
n^
B_
l
k
Ψ
h
l⊥
C
^
l
k
^
n
l⊥
a)
l
b)
Figura 2.9: Circulação do campo B na vizinhança de uma superfı́cie de fronteira,
Ψ, em que corre uma corrente superficial com densidade k. a) os vectores B + e B −
são os limites do campo de um e do outro lados da superfı́cie; b) representação da
projeção vertical do contorno C. Note que: ℓ⊥ = ℓ · (k̂ × n̂), e que n̂ × (k̂ × n̂) = k̂.
B+
B_
ds
n^
h
k
Ψ
ds
Figura 2.10: Fluxo do campo B através de uma superfı́cie S, na vizinhança da
superfı́cie de fronteira, Ψ, na qual corre uma corrente k, no limite h → 0.
26
CAPÍTULO 2. MAGNETOSTÁTICA
B
z
B
C’
B
dl’
r’
i
r"
dl
r
A(r)
C
y
x
Figura 2.11: Circulação do potencial vector, A, num contorno C, em que o campo
é criado por um circuito C ′ , com corrente i.
B
B
B
S
C
i
Figura 2.12: O fluxo do campo magnético através da área do próprio circuito que
o gera é proporcional à indutância desse circuito, Φ = Li, onde L é a indutância.
Considerando o teorema de Stokes, conclui-se assim que
Φ=
I
C
A · dℓ
(2.32)
Ou seja, o fluxo do campo B através de uma superfı́cie aberta qualquer é
igual à circulação do potencial vector ao longo do contorno que delimita essa
superfı́cie (ver fig. 2.11).
Considere-se que um circuito eléctrico, C, é percorrido por uma corrente
i. O campo criado por este circuito é proporcional à corrente i, em qualquer
ponto do espaço. Considere-se em particular a área delimitada por esse
circuito,
(fig. 2.12). O fluxo através da área, S, delimitada pelo circuito,
R
Φ = S B · ds, há de pois ser proporcional à corrente que o percorre, pois
assim é com o campo; isto é, Φ ∝ B ∝ i. Esta proporcionalidade costuma
ser escrita na forma
Φ = Li
(2.33)
27
2.5. FLUXO MAGNÉTICO E INDUTÂNCIA
z
C
d l’
r’
i
r"
r
θ′
d A(r)
y
x
Figura 2.13: O potencial vector devido a um circuito filiforme, C, com corrente
i, num ponto r.
onde a constante L é a indutância do circuito, também chamada de autoindutância. A indutância tem, na magnetostática, papel análogo ao que tem a
capacidade na eletrostática.18
O potencial vector criado por um fio fino percorrido por uma corrente
estacionária, i, é dado pela eq. 2.19, fazendo j dτ ′ = i dℓ′ , (ver eq. 2.3),
µ0 i I dℓ′
A(r) =
4π C r′′
(2.34)
onde r ′′ = r−r ′ , (ver fig. 2.13). Inserindo esta expressão na eq. 2.32 obtém-se
µ0 i I I dℓ · dℓ′
Φ=
A · dℓ =
4π C C r′′
C
I
ou seja, a indutância, L, do circuito tem a forma
µ0 I I dℓ · dℓ′
L=
4π C C r′′
(2.35)
Esta expressão põe em evidência o carácter eminentemente geométrico da
indutância (ver fig. 2.14). A equação permite calcular a indutância de qualquer circuito. Porém, geralmente é mais conveniente calcular a indutância a
partir da energia magnética, como se verá adiante (eq. 2.48.
Indutância mutua
Sejam dois circuitos C1 e C2 (ver fig. 2.15). Em cada ponto do espaço, o
campo é a soma dos campos B 1 e B 2 criados por C1 e C2 , respectivamente.
18
A indutância mede-se no sistema S.I. em henry (i.e., em volt.segundo/ampere).
28
CAPÍTULO 2. MAGNETOSTÁTICA
A(r)
z
dl
r"
r
dl’
r’
i
C
y
x
Figura 2.14: A indutância é um parâmetro puramente geométrico do circuito,
L=
µ0
4π
dℓ·dℓ
C C r ′′
H H
′
.
B
B
r12
C1
dl2
i2
C2
i1
dl1
Figura 2.15: Acoplamento eletromagnético entre dois circuitos, C1 e C2 . O fluxo
magnético do campo criado por um circuito que passa através da área do outro
circuito é proporcional à indutância mutua: Φ1→2 = Φ12 = M i1 e Φ2→1 = Φ21 =
M i2 .
29
2.5. FLUXO MAGNÉTICO E INDUTÂNCIA
O fluxo de B 1 que passa através da superfı́cie S2 do circuito C2 é
Φ12 =
Z
S2
B 1 · ds =
Ou seja,
Φ12
I
C2
µ0 I dℓ1
com A1 =
i1
4π C1 r12
A1 · dℓ2 ,
µ0 I I dℓ1 · dℓ2
i1 = M12 i1
=
4π C1 C2 r12
{z
|
M12
(2.36)
}
Por seu lado, o fluxo de B 2 através da superfı́cie S1 do circuito C1 é Φ21 =
S1 B 2 · ds e, portanto,
R
Φ21
µ0 I I dℓ1 · dℓ2
=
i2 = M21 i2
4π C1 C2 r12
{z
|
M21
(2.37)
}
A quantidade M12 = M21 = M é a indutância mútua dos dois circuitos. É
evidente nas equações anteriores que a indutância mútua é também, tal como
L, um fator puramente geométrico do sistema de circuitos.
As equações 2.36 e 2.37 evidenciam uma propriedade de reciprocidade
espantosa e são conhecidas como fórmulas de Neumann.
Fórmula de Neumann. Independentemente das formas dos circuitos, da
sua orientação e da posição relativa entre eles, o fluxo criado pelo circuito
C1 no circuito C2 quando em C1 passa a corrente i é igual ao fluxo que o
circuito C2 cria em C1 se em C2 passar a mesma corrente.
Designe-se por Φ11 o fluxo de B 1 através da área de C1 e por Φ22 o fluxo
de B 2 em C2 , (ver fig. 2.15). Visto que nem todas as linhas de campo que
passam em C1 atravessam necessariamente a área de C2 , o fluxo Φ12 é em
geral apenas uma fracção, f1 , do fluxo Φ11 , (analogamente para o circuito
C2 ). Isto é, em geral,
Φ12 = f1 Φ11
Φ21 = f2 Φ22
onde Φ11 = L1 i1 ; Φ22 = L2 i2 ; Φ12 = M i1 e Φ21 = M i2 . Por conseguinte,
(
M i1 = f 1 L1 i1
M i2 = f 2 L2 i2
30
CAPÍTULO 2. MAGNETOSTÁTICA
B
S
C
ds
i
11111111
00000000
00000000
11111111
dl
dr
a)
i dl
dξ
dr
b)
Figura 2.16: O elemento de corrente idℓ tem um deslocamento dr no intervalo de
tempo dt. a) durante esse tempo, o elemento de corrente varre a área ds; b) nesse
tempo o deslocamento de cada carga é dξ = dr + dℓ.
e, portanto, M = f1 L1 = f2 L2 . Ou seja,
M=
q
f1 f2
q
L1 L2
(2.38)
√
O coeficiente f = f1 f2 é o chamado fator de acoplamento entre os dois
circuitos. Este fator, f ≤ 1, mede as perdas de fluxo no acoplamento
√ entre
os dois circuitos; se não houver perdas de fluxo, então f = 1 e M = L1 L2 .
Os efeitos de perda de fluxo magnético são sobremaneira importantes na
eficiência dos chamados circuitos magnéticos, mormente em transformadores
eléctricos, motores, geradores, etc... Com efeito, como veremos, fluxo é energia!
2.6
A energia magnetostática
Aceita-se facilmente a priori que uma corrente eléctrica tem energia. Importa portanto analisar a energia de um circuito, em particular que energia é
necessário pôr num circuito ideal (sem resistência) até que nele circule uma
corrente estacionária, i, partindo de uma corrente inicial nula.
Supomos que no circuito da fig. 2.16 circula uma corrente constante, i, em
regime estacionário e que o circuito é atravessado por um campo magnético,
B. Sobre o elemento diferencial do circuito, dℓ, atua então a força de Laplace,
dF = idℓ × B.
Suponha-se agora que se desloca o circuito e que, num intervalo de tempo
dt, o elemento dℓ passa de r para r + dr. Nesse percurso elementar a força
2.6. A ENERGIA MAGNETOSTÁTICA
31
dF anterior realiza o trabalho dW = dF · dr. Considerando o produto triplo
vectorial,19 conclui-se que
dW = i(dℓ × B) · dr = iB · (dr × dℓ) = iB · ds = i dΦ
|
{z
}
ds
(2.39)
Isto é, o trabalho realizado é igual à variação do fluxo do campo magnético
através da área do circuito. Variar o fluxo custa energia!
A situação é, porém, mais subtil do que aparenta. Ao provocar o deslocamento dr, cada carga não se desloca dℓ, mas, de facto, dξ = dℓ + dr (ver
fig. 2.16b). Se u for a velocidade das cargas em relação ao fio e v a velocidade
de deslocamento do fio, então dℓ = u dt e dr = v dt e a velocidade das cargas
em relação ao campo B é ddtξ = u + v. A força magnética de Lorentz sobre
dq é portanto, de facto,
dF m = dqu × B + dqv × B =
dq
dq
u dt × B + v dt × B
dt
dt
× B}
= |idℓ {z
× B} + |idr{z
dF
dF
No intervalo de tempo, dt, a força magnética, dF m , realiza o trabalho,
dWtot = dF m · dξ,
dWtot = i(dℓ × B) · dr + i(dr × B) · dℓ = 0
(2.40)
pois (dr × B) · dℓ = (B × dℓ) · dr). Isto é, as duas parcelas da equação
anterior são simétricas uma da outra. Não é surpresa que assim seja, pois já
antes tı́nhamos visto que a força magnética total não realiza trabalho sobre
as cargas em que atua!, (ver § 2.4.1).
Como a primeira parcela da eq. 2.40 é igual a idΦ (ver eq. 2.39), conclui-se
que,
dF · dℓ = −i dΦ
(2.41)
Isto é, enquanto que dF ⊥ dℓ; a força dF tem, como se vê, uma componente
ao longo do fio, positiva ou negativa dependendo da variação de fluxo que
ocorrer, dΦ. Isto significa que para manter as condições estacionárias do
sistema, (i.e., para manter a corrente constante enquanto varia o fluxo), é
19
Produto triplo escalar:a · (b × c) = c · (a × b) = b · (c × a).
Produto triplo vectorial:a × (b × c) = b(a · c) − c(a · b).
32
CAPÍTULO 2. MAGNETOSTÁTICA
necessário contrariar a força dF e injetar no sistema a energia correspondente
ao trabalho desta força. Assim, se o fluxo magnético através do circuito variar
mantendo as condições estacionárias, há seguramente uma “mão invisı́vel”
que mantém essas condições, transferindo para o sistema a energia necessária.
Na verdade, a variação de fluxo não tem que resultar de movimento do circuito, como acima consideramos. É equivalente considerar o circuito parado
e ter as fontes do campo B a moverem-se com a mesma velocidade em sentido contrário (só importa o movimento relativo entre o circuito e o campo).
É também equivalente a situação em que tudo está parado, mas em que o
campo B varia com o tempo de modo exato a dar a mesma variação de
fluxo através do circuito.20 As três situação são fisicamente equivalentes e
indistinguı́veis, o que releva é a variação de fluxo.
Num intervalo de tempo dt, a força dF realiza o trabalho, dW = − dq
dΦ.
dt
Ou seja, o trabalho realizado por unidade de carga ao longo do fio é
E=
dΦ
dW
=−
dq
dt
(2.42)
Ao trabalho realizado por unidade de carga ao longo do circuito chama-se
força electromotriz - esta equação é a famosa lei de Faraday/Lenz.
No caso particular em que o campo B é criado pelo próprio circuito, o
fluxo que o atravessa é Φ = Li, (L é uma constante do circuito). Suponhase que no instante em que se liga o interruptor a corrente inicial é zero e
di
que ela vai aumentando, em incrementos sucessivos, di = dt
dt, em condições
quase estacionárias. Ao incrementar a corrente de i → i + di, o fluxo varia
de dΦ = L di e, portanto, tem que ser realizado sobre o sistema o trabalho
dW = idΦ = Li di. Ou seja, o trabalho total que tem que se realizar até ter
a corrente i é
Z i
Li2
(2.43)
W =
iLdi =
2
0
Esta é a forma habitual de expressar a energia armazenada num circuito
indutivo, com indutância L.
A expressão anterior pode também ser escrita como W = 12 iΦ e, portanto,
da eq. 2.32 vem
1 I
W = i A · dℓ
(2.44)
2 C
20
Um observador cego, sentado em cima do circuito não tem forma de saber por que
varia o campo na área do circuito, se é porque as fontes que o criam se estão a mover ou
se é a intensidade das fontes que está a variar com o tempo.
33
2.6. A ENERGIA MAGNETOSTÁTICA
No caso mais geral, em que as correntes se espalham por um volume τ , tais
que, em cada ponto, idℓ → j dτ , então
1Z
W =
A · j dτ
2 τ
(2.45)
Este integral dá-nos a energia de qualquer distribuição de correntes (é válida
até mesmo na mecânica quântica!).
É conveniente porém expressar a energia da distribuição de correntes
apenas em função dos campos. O integral 2.45 pode ser estendido a todo o
espaço, já que é nula a contribuição para o integral de pontos onde j = 0.
Como ∇ × B = µ0 j, então
1 Z
W =
A · (∇ × B) dτ
2µ0 τ
A simplificação deste integral passa por escrevê-lo em termos de uma divergência, graças à identidade vectorial ∇·(A×B) = B·(∇×A)−A·(∇×B),
(ver apêndice A), de modo a convertê-lo depois num integral de superfı́cie,
pelo teorema da divergência. Assim,
A · (∇ × B) = B · (∇ × A) − ∇ · (A × B) = B 2 − ∇ · (A × B)
já que B = ∇ × A. Então, usando o teorema da divergência sobre todo o
espaço, com τ → ∞, tem-se
W =
=
1
2µ0
1
2µ0
R
τ
R
τ
B 2 dτ −
B 2 dτ −
1 R
2µ0 τ
1
2µ0
I
∇ · (A × B)dτ
|S
(A × B) · ds
{z
ց0
}
Os integrais anteriores são integrais estendidos a todo o espaço: - o primeiro
integra todos os pontos até infinito, mas o segundo integra apenas pontos
de infinito, sobre a superfı́cie S, em r ∼ ∞. O infinito está por definição
equidistante de qualquer ponto, pois qualquer região finita de cargas ou correntes tem, nessa escala, a dimensão de um ponto. Isto é, nesse limite, S é
uma esfera de raio r, em que r → ∞, e ds = r2 sin θ dθdϕ. Lá longe, sobre
a superfı́cie S, com as correntes circunscritas à vizinhança de um ponto, o
campo varia como B ∼ r12 ; A ∼ 1r e, portanto,
lim
r→∞
I
S
(A × B) · ds = r→∞
lim
I
S
11 2
r sin θ dθdϕ = 0
r r2
34
CAPÍTULO 2. MAGNETOSTÁTICA
Por conseguinte, a energia de uma distribuição de correntes, que gera no
vazio o campo magnetostático B, é dada pelo integral
Um =
1 Z 2
B dτ
2µ0 τ
(2.46)
A correspondente densidade de energia magnética em cada ponto do espaço,
m
, é, portanto,
um = dU
dτ
1 2
um =
B
(2.47)
2µ0
Ou seja, isto significa que em cada ponto do espaço onde há campo
magnético há energia, com densidade proporcional ao quadrado do campo.
Repare-se na semelhança formal evidente que existe entre as densidades de
energia magnetostática e eletrostática em relação aos respectivos campos. De
facto, até podı́amos ter antecipado este resultado, pois, como dissemos atrás,
o campo magnetostático que observamos no nosso referencial do laboratório
é afinal uma manifestação do campo eletrostático criado no referencial das
cargas paradas (em que não há corrente). Não surpreende portanto que
ambos os campos tenham uma relação similar com a energia em cada ponto.
A eq. 2.46 é uma relação muito útil para calcular a indutância de um
circuito. A energia magnética total, em todo o espaço, é
1 Z 2
Li2
Um =
B dτ =
2µ0 τ
2
(2.48)
Podemos pois extrair imediatamente a indutância, L, de um qualquer circuito, contando que se conhece o campo magnético, B, que ele cria em cada
ponto do espaço e o respectivo integral.
2.7
Expansão multipolar do potencial vector
No paragrafo § 1.5.9 vimos que, fora da região de cargas, o potencial escalar,
V , criado por uma distribuição de cargas, se pode expandir numa série de
termos multipolares em pontos afastados da região em que elas estão. Por
igual razão, o potencial vector, A, também pode ser expandido dessa forma,
m pontos longe da região das correntes que o originam.
Seja o circuito, C, da fig. 2.14. A eq. 2.34 diz-nos que,
A(r) =
µ0 i I dℓ′
4π C r′′
2.7. EXPANSÃO MULTIPOLAR DO POTENCIAL VECTOR
35
com r ′′ = r − r ′ . Considerando a expansão do quociente r1′′ , (ver § 1.5.9) em
′
série de Taylor, (em potências de rr ), pode-se então escrever, fora da zona de
correntes, em pontos r ≫ r′ , que
∞
µ0 i X
1 I ′ n
(r ) Pn (cos θ′ )dℓ′
4π n=0 rn+1 C
A(r) =
(2.49)
onde θ′ é o ângulo entre r e r ′ . Ou seja, concretizando, em pontos tais que
r ≫ r′ , o potencial A é
1I
1
1 I ′
1 I ′2 3
′
′
′
2 ′
′
dℓ + · · ·
cos θ −
r cos θ dℓ + 3
r
dℓ + 2
2 {z
2
C
|r C {z
}
} |r C
|r {z
}
monopolo
dipolo
quadrupolo
(2.50)
H
′
A primeira parcela é nula, pois C dℓ = 0. Isto significa que, pelo menos
no âmbito desta teoria, não há monopolos magnéticos.21 Consequentemente,
o primeiro elemento não nulo da série - i.e., o termo mais importante - é o
termo dipolar. O dipolo magnético é assim o elemento mais básico das fontes
de campo magnético e tem, portanto, a maior relevância na magnetostática.
µ0 i
A(r) =
4π
O potencial dipolar magnético
O termo dipolar magnético da eq. 2.50 pode ser escrito na forma, (ver
fig. 2.14),
µ0 i 1 I
Adip =
(r̂ · r ′ )dℓ′
2
4π r C
′
′
dado que r̂ · r̂ = cos θ . O teorema de Stokes permite converter este
integral
H
num
integral
sobre
a
superfı́cie
do
circuito,
através
da
equação,
C f dℓ =
R
22
− S ∇f × ds, (ver apêndice A) e fica
Adip
µ0 i 1 Z
=
ds ′ × ∇′ (r̂ · r ′ )
2
4π r S
21
De facto não está excluı́do teoricamente que possa haver monopolos magnéticos
[Dirac]. Recentemente, em 2014, [nature12954] foi publicado um artigo em que se emulam artificialmente as condições de criação de monopolos e observou-se a sua formação.
Mas na natureza jamais foram
R
H detetados.
22
No teorema de Stokes, C G · dℓ = S (∇ × G) · ds, se G, que é qualquer, for G = f α,
com α = constante, então, como ∇ × (f α) = f ∇ × α − α × ∇f e como, pelo produto
triplo, (α × ∇f ) · ds = (∇f × ds) · α, então
I
Z
α·
f dℓ = −α · (∇f × ds,
∀α
C
S
36
CAPÍTULO 2. MAGNETOSTÁTICA
m
S
i
Figura 2.17: O dipolo magnético elementar, m = iS n̂, onde n̂ é a normal à
superfı́cie da espira com o sentido dado pela regra da mão direita em relação ao
sentido de circulação da corrente.
onde o operador ∇′ opera sobre as variáveis r ′ . Em coordenadas cartesianas,
P
P
∇′ ≡ 3j=1 ∂x′j êj e (r̂ · r ′ ) = 3i=1 xri x′i . Por conseguinte,
∇′ (r̂ · r ′ ) =
Ou seja, Adip =
µ0 i 1
4π r 2
R
S
3
3
1 X
∂x′
1X
xi ′i êi =
xi êi = r̂
r i,j=1 ∂xj
r i=1
ds′ × r̂ e, portanto,
Adip =
µ0 m × r̂
,
4π r2
com m = iS
(2.51)
onde S = S n̂, sendo S a área abraçada pelo circuito C e n̂ tem o sentido dado
pela regra da mão direita relativamente ao sentido de circulação da corrente.
O vector, m = iS n̂, é o momento dipolar magnético do circuito. Ou seja,
o momento dipolar magnético elementar é convenientemente descrito pelo
produto entre a corrente e a área que ela delimita, com direção e sentido
dados pela regra da mão direita, (ver fig. 2.17).
O termo dipolar é o termo principal da série da eq. 2.50. Os termos de
ordem superior: o termo quadrupolar magnético, octopolar magnético, etc...
vão rapidamente para zero, para distâncias grandes. A sua importância para
o potencial depende da precisão com que se queira descrever o campo e
das correções que sejam necessárias em determinada aplicação (e.g., alguns
Por conseguinte,
I
C
f dℓ = −
Z
S
(∇f × ds
onde a normal a ds tem, em cada ponto, o sentido dado pela regra da mão direita.
2.8. ENERGIA POTENCIAL DE UM DIPOLO MAGNÉTICO
37
equipamentos têm bobinas de correção quadrupolar, etc...).23 Contudo, não
analisamos aqui esses termos de ordem superior.
É instrutivo colocar lado a lado e comparar os potenciais dos dipolos
eléctrico e magnético ideais, Vdip e Adip (eqs. 1.77e 2.51),
Vdip =
Adip =
1 p·r̂
4πǫ0 r 2
µ0 m×r̂
4π r 2
(2.52)
(2.53)
A semelhança formal entre as duas expressões é manifesta: - ambos os potenciais decrescem com o quadrado da distância e são proporcionais aos respectivos momentos dipolares, conquanto um seja escalar e o outro vectorial.
Os campos E e B variam também ambos com o cubo da distância, e são
também semelhantes entre si na forma,
E dip = −∇Vdip =
p
(2 cos θ r̂
4πǫ0 r 3
+ sin θ θ̂)
µ0 m
(2 cos θ r̂
4πr 3
+ sin θ θ̂)
B dip = ∇ × Adip =
(2.54)
(2.55)
(2.56)
Estas expressões são válidas na aproximação de dipolo ideal (e orientado
segundo ẑ), em que a distância ao dipolo é r ≫ r′ , onde r′ descreve a região de
cargas ou correntes. As linhas de campo de E dip e de B dip estão representadas
na fig. 2.18, lado a lado. Na fig. 2.19 representam-se, para comparação, os
campos E e B de dipolos reais.
2.8
Energia potencial de um dipolo magnético
Seja um dipolo magnético constituı́do por uma espira quadrada, de lado a, na
presença de um campo magnético externo, B, que é constante na região da
espira.24 O plano da espira está, por hipótese, inclinado de um ângulo θ em
relação a B, (ver fig. 2.20). A força de Laplace (eq. 2.10) que atua sobre cada
elemento dℓ da espira é dF = idℓ×B. As forças nos lados (3) e (4) cancelamse mutuamente, porque são opostas; as outras forças constituem um binário
23
Por exemplo, o campo magnético da Terra é aproximadamente dipolar, tem polos N
e S. Todavia, uma descrição mais fina do campo magnético terrestre requer a inclusão de
mais termos da série multipolar, dependendo da precisão da aproximação.
24
Uma espira com forma arbitrária pode ser considerada como uma soma de espiras infinitesimais (ver fig. 2.20); os argumentos apresentados para uma espira elementar também
se lhe aplicam.
38
CAPÍTULO 2. MAGNETOSTÁTICA
B
E
a)
b)
Figura 2.18: Linhas de campo de E e B no plano xy, criados por dipolos ideais
com direção/sentido ẑ: a) dipolo eléctrico e b) dipolo magnético.
+
_
a)
b)
Figura 2.19: Linhas de campo de E e B no plano xy, criados por dipolos reais
com direção/sentido ẑ: a) dipolo eléctrico e b) dipolo magnético.
39
2.8. ENERGIA POTENCIAL DE UM DIPOLO MAGNÉTICO
m
B
B
θ
F
i
F
(4)
z
i
i
(1)
B
θ
F
θ
B
(3)
(2)
F
m
i
θ
B
i
F
r
x^
y
r
i
F
a)
b)
Figura 2.20: Uma espira quadrada, com corrente, i, posta na presença de um
campo magnético externo, B, fica sujeita a um binário de forças. a) representação
em perspetiva; b) representação da projeção yz.
de forças, cujo momento é N = 2 (r × F ) = aF sin θ x̂ = ia2 B sin θ x̂, pois
r = a/2. Ou seja,
N =m×B
(2.57)
O dipolo magnético fica sujeito a um binário de forças. Esta expressão é
válida para qualquer momento dipolar pois, em princı́pio qualquer dipolo
poderá
ser decomposto
numa soma de espiras infinitesimais, sendo então
R
R
N = dN = dm × B.
À mercê do binário de forças anterior, o dipolo tende a rodar na direção
do campo B e podemos-lhe portanto associar uma energia potencial. A
energia potencial de orientação do dipolo magnético relativamente ao campo
relaciona-se com o trabalho das forças do binário. Ora, o trabalho que é
realizado pelas forças de um campo é sempre feito a expensas da energia
potencial, U , que por isso baixa. Assim, num percurso elementar, dλ, tem-se
P
−dU = F · dλ.
Sob efeito do binário de forças, se o dipolo da fig. 2.21 rodar um ângulo
dθ em torno do eixo x, tal que θ → θ + dθ, com dθ < 0, os lados (1) e (2)
movem-se, qualquer deles, uma distância, dλ = −rdθ, (note que dθ < 0,
ver fig. 2.21). Considerando o trabalho das duas forças do binário, temos
40
CAPÍTULO 2. MAGNETOSTÁTICA
z
B
m
F
dλ
θ dθ
i
dθ r
B
θ
y
r
i
dλ
F
Figura 2.21: Rotação de um momento magnético m colocado na presença de um
campo B.
P
i
F i · dλi = −2F r dθ sin θ = F a sin θ dθ = −ia2 B sin θ dθ. Ou seja,25
dU = mB sin θ dθ
R
Integrando esta equação tem-se, θ0 dU = U (0) − U (θ) = mB cos θ − mB.
Ora, como esta igualdade é válida para qualquer ângulo θ, então deve ser
U (θ) = −mB cos θ (e U (0) = −mB). Isto é, a energia potencial de um
25
De facto, o deslocamento do fio da espira significa que cada carga tem o deslocamento
dℓ → dξ = dℓ + dλ e, portanto, dF → dF m = dF + dF , onde dF = idλ × B. O trabalho
da força de Lorentz, dF m , é nulo, pois, de facto,
dWtot = dF m · dξ = dF · dλ + i(dλ × B) · dℓ = 0
(ver § 2.6). A primeira parcela corresponde ao trabalho das forças do binário. A segunda
parcela representa o trabalho da componente da força dF na direção da corrente; o que
significa que esta parcela altera a corrente, (porque acelera as cargas). Por conseguinte,
se a espira rodar a corrente varia, facto que não surpreende, já que se dá uma variação
do fluxo do campo magnético através da espira quando esta roda, (ver eq. 2.39). Ao
supor que a espira tem corrente, i, constante, está-se pois, implicitamente, a assumir que
é transferida para o sistema a energia necessária para manter as condições estacionárias
(ver a discussão em § 2.6). Por isso, em condições estacionárias, o que releva e de facto
importa é o trabalho das forças do binário.
Em face destas conclusões é evidente que um momento magnético que é constante só
pode rodar no campo se efetivamente trocar energia com o meio exterior (e.g., se o dipolo
for uma espira de corrente, ou um enrolamento, a corrente só se mantém constante quando
roda se lhe for injetada potência a partir de uma fonte externa; no fim de contas é isso
que se faz num motor elétrico).
41
2.9. MEIOS MAGNÉTICOS
dipolo magnético, m, na presença de um campo, B, é
U = −m · B
(2.58)
A energia potencial é portanto mı́nima quando o dipolo se orientar no sentido
do campo. Porém, tal só acontece se ele trocar energia com o meio envolvente,
porque tem que haver conservação de energia, de contrário ficará a precessar
em torno da direção do campo, como faz um pião.26
Em suma, de modo análogo ao que se verifica com um dipolo eléctrico,
um dipolo magnético na presença de um campo magnético tem uma energia
potencial de orientação e sente um binário os quais são dados respectivamente
pelo produto escalar e pelo produto vectorial entre o momento dipolar e o
campo.
Se o campo B for uniforme, a força total sentida pelo dipolo magnético
é nula. Não sendo esse o caso, dado que F = −∇U , então
F = ∇(m · B)
(2.59)
Dado que o campo B é criado por correntes que estão algures, afastadas
do dipolo, então, no regime estacionário, ∇ × B = 0 e a expressão anterior
reduz-se27 a F = (m · ∇)B, (cf. com a expressão análoga para o dipolo
eléctrico).
2.9
Meios magnéticos
Um material a que seja aplicado um campo magnético exterior evidencia sempre algum tipo de comportamento magnético, mais ou menos pronunciado
dependendo das suas caracterı́sticas especı́ficas.
Em geral, no que concerne ao magnetismo, os materiais classificam-se em
três grandes categorias, consoante a resposta que têm a um campo magnético
26
É a minimização de energia que faz que a agulha de uma bússola (que é um dipolo
magnético), se oriente no sentido das linhas do campo magnético da Terra (sem nenhum atrito a agulha ficaria a oscilar indefinidamente em torno do N). Na ressonância
magnética nuclear (NMR) os dipolos magnéticos nucleares são solicitados por um campo
magnético exterior muito forte. Uma onda electromagnética enviada do exterior interage,
em condições ressonantes, com os dipolos e promove o seu alinhamento na direção do
campo, ao estimular a libertação da energia dipolar magnética na forma de uma onda
electromagnética. Esta última permite fazer uma imagem das condições locais do meio,
com eventual interesse médico. É neste princı́pio que se baseia toda a imagiologia de NMR.
27
Note que ∇(a · b) = a × (∇ × b) + b × (∇ × a) + (a · ∇)b + (b · ∇)a
42
CAPÍTULO 2. MAGNETOSTÁTICA
externo: i) diamagnéticos; ii) paramagnéticos ou iii) ferromagnéticos (incluindo nestes os antiferromagnéticos, incluindo os ferrimagnéticos).
O comportamento magnético é determinado primeiramente pela existência de dipolos magnéticos no meio material, quer eles sejam induzidos
por um campo magnético exterior ou sejam intrı́nsecos à própria natureza
desse material.
Do ponto de vista macroscópico podemos pois descrever o magnetismo de
um material a partir da respectiva densidade de dipolos magnéticos, independentemente da origem, natureza ou causa desses dipolos. É pois adequado
definir a magnetização igual à densidade dipolar magnética,
dm
M=
(2.60)
dτ
Regra geral, a magnetização é mais significativa se o campo exterior aplicado for mais intenso (excepto se for tão intenso que a magnetização atinja o
valor de saturação). Todavia, a resposta dos materiais magnéticos não varia
geralmente de forma linear com o campo aplicado, especialmente se forem
ferromagnéticos. Mas deixemos essa discussão para depois.
Analisaremos mais adiante a origem e a natureza microscópica dos dipolos magnéticos de um material. Porém, do ponto de vista estrito da descrição
macroscópica do magnetismo nos materiais, podemos por ora atribuir a magnetização a correntes equivalentes existentes dentro do material, a que daremos o nome de correntes de magnetização ou correntes de Ampère. Estas
correntes equivalentes de magnetização, a que se atribui a origem da magnetização, são evidentemente um modelo de pensamento, mas é um modelo
muito útil por permitir trazer os meios materiais para o âmbito da magnetostática.
Há pois necessidade de distinguir explicitamente as correntes livres, cuja
densidade é j ℓ , e as de magnetização, com densidade é designada por j m ,
a que se atribui a magnetização. A densidade de corrente em pontos de
um meio material é portanto j = j ℓ + j m . Nas superfı́cies dos materiais
também pode haver correntes superficiais, quer livres quer de magnetização,
com densidades kℓ e km , respectivamente, em que k = kℓ + km .
A magnetização
Seja um material homogéneo, magnetizado, dentro do qual a magnetização
é M . Cada dipolo magnético elementar, dm, pode ser associado a uma espira equivalente, com corrente δim , área ds e comprimento/espessura dℓ⊥ ,
43
2.9. MEIOS MAGNÉTICOS
^n
M
^
k
km
km
111
000
000
111
000d m
111
δ l⊥
Figura 2.22: A magnetização de um material. Dipolos magnéticos e correntes
elementares equivalentes de Ampère associados à magnetização.
tal que dm = δim ds m̂ (ver fig. 2.22). Em resultado da sobreposição destas
correntes elementares surgem correntes superficiais de magnetização, com
δim
densidade km = dℓ
, (se a magnetização for homogénea, as correntes el⊥
ementares cancelam-se mutuamente em todo o volume). Por conseguinte,
m = δim m̂ = k m̂, já que dτ = dsdℓ . Dado que m̂ = n̂ × k̂ , então
M = ddτ
m
⊥
m
dℓ⊥
conclui-se que
M = n̂ × km
e que
km = M × n̂
(2.61)
Há portanto uma relação direta entre a magnetização e as correntes superficiais de magnetização. A equação anterior não envolve contudo as correntes
volumétricas, j m , cujo efeito é igualmente necessário considerar.
Numa região de volume τ , delimitada pela superfı́cie S, a soma de todas as correntes de magnetização, dentro e sobre S, há de ser sempre zero,
evidentemente. Ou seja, (ver fig. 2.23),
Z
τ
j m dτ +
I
S
km ds = 0
(2.62)
Substituindo a eq. 2.61 vem
Z
τ
j m dτ +
I
S
(M × n̂) ds = 0
O integral em S pode ser convertido num integral de volume através do
teorema de Gauss,28 ficando então
Z
28
τ
Se no teorema de Gauss,
j m dτ −
H
S
Z
τ
(∇ × M ) dτ = 0
G · ds =
R
τ
∇ · Gdτ , o campo G, que é qualquer, for
44
CAPÍTULO 2. MAGNETOSTÁTICA
Como esta igualdade é válida independentemente do volume que se considere,
então necessariamente
∇ × M = jm
(2.63)
supondo que as funções são bem comportadas. Conclui-se assim que as fontes
do campo M se podem atribuir efetivamente a correntes de magnetização.
Aliás, foi assim que as concebemos: como correntes (equivalentes) que criam
os dipolos do material.
Aplicando o teorema de Stokes à equação anterior conclui-se que, M
também satisfaz a equação integral,
I
C
M · dℓ = im
(2.64)
Nas superfı́cies em que haja correntes superficiais, mormente nas interfaces entre meios magnéticos diferentes, aplicar-se-á a equação de fronteira,
rotS M = n̂ × (M + − M − ) = km
(2.65)
como é fácil de concluir considerando uma circulação da magnetização na
vizinhança dessa superfı́cie, (ver § 2.4.4). Vemos agora que a eq. 2.61 é afinal
um caso particular da eq. 2.65, quando M + = 0.
O campo M definido nos termos anteriores é um campo médio, com
interesse para uma descrição macroscópica dos fenómenos de magnetismo,
cujo rotacional é igual à densidade de correntes equivalentes de magnetização.
Todavia, nos termos do teorema de Helmholtz (§ 1.8), essa condição não
é suficiente para definir o campo M , é também necessária a equação da
divergência, ∇ · M . Ou seja, apesar de ∇ × B e ∇ × M serem formalmente
semelhantes e terem as correntes como fontes, B e M não têm a mesma
estrutura vectorial: - o campo B é sempre solenoidal (∇ · B = 0), mas o
campo M pode ter ∇ · M 6= 0.
O campo H
Todas as correntes criam campo magnético, B, i.e., todas são fontes do
campo B, quer as correntes livres quer as (equivalentes) de magnetização.
G = A × B, com B = contante, então, como ∇ · (A × B) = B · (∇ × A) − A · (∇ × B) e,
como pelo produto triplo, (A × B) · ds = (ds × A) · B, tem-se que
Z
I
A × ds = − (∇ × A)d τ
S
τ
45
2.9. MEIOS MAGNÉTICOS
km
n^
ds
jm
jm
km
τ
S
Figura 2.23: Correntes de magnetização, superficiais e volumétricas, km j m , numa
região do espaço.
Ou seja, num material,
∇ × B = µ0 (j ℓ + j m )
(2.66)
Inserindo a eq. 2.63, obtém-se então
B
−M
∇×
µ0
|
{z
H
Isto é, podemos definir um campo, H,
H=
!
= jℓ
}
B
−M
µ0
(2.67)
cujo rotacional depende apenas das correntes livres,
∇ × H = jℓ
(2.68)
Integrando esta equação obtém-se também, nos termos do teorema de Stokes,
a equação integral de Ampère,
I
C
H · dℓ =
X
iℓ
(2.69)
O campo magnético, B, pode portanto ser escrito como a soma do campo
das correntes livres mais o campo das correntes de magnetização,
B = µ0 (H + M )
(2.70)
46
CAPÍTULO 2. MAGNETOSTÁTICA
No contexto do magnetismo usa-se chamar campo magnético ao campo
H, designando nesse caso o campo B como o campo de indução magnética ou
densidade de fluxo magnético. Mas, como referimos atrás (pág. 12), optámos
por chamar campo magnético a B (como é voz corrente) e designar H simplesmente como “campo H”. De resto, H é um campo meramente auxiliar,
não é verdadeiramente um campo magnético solenoidal como é o campo B,
porque em geral ∇ · H 6= 0.
Com efeito, as correntes livres definem o rotacional de H, (eq. 2.68), mas
essa condição per se não é suficiente para definir o campo H; é também
necessária a sua divergência, cf. teorema de Helmholtz. O campo B é
um campo solenoidal, que tem sempre divergência nula em todas as circunstâncias. Assim, tomando a eq. 2.70,
0 = ∇ · B = µ0 (∇ · H + ∇ · M )
∇ · H = −∇ · M
(2.71)
(2.72)
O campo H não depende portanto só das correntes livres, depende também,
ainda que indiretamente, das correntes de magnetização, através da divergência de M . Por igual razão, a magnetização também não depende
só das correntes de magnetização, mas também das correntes livres. Ou
seja, os dois campos, H e M , estão umbilicalmente unidos pela eq. 2.72.
Somente nos casos em que ∇ · M = 0, e só nesses casos, é que o campo
H é verdadeiramente solenoidal, e só nesse caso é que depende apenas das
correntes livres!
As equações do campo H são pois,
(
∇ × H = jℓ
∇ · H = −∇ · M
(2.73)
Em superfı́cies de interface as condições de fronteira de H obtêm-se como
fizemos para B, em § 2.4.4,
(
rotS H = kℓ
divS H = −divS M
(2.74)
Susceptibilidade magnética
Em geral, um material (não magnetizado) que seja posto na presença de um
campo magnético exterior adquire uma magnetização que é proporcional ao
campo aplicado, sendo
M = χm H
(2.75)
47
2.9. MEIOS MAGNÉTICOS
ainda que o coeficiente não seja geralmente constante.29 O fator χm é a
susceptibilidade magnética do material. Se χm for constante então a relação
entre M e H é linear, mas nem sempre é assim. Essa questão será discutida
mais à frente.
Se o material for linear, isotrópico e homogéneo, χm é constante e a
eq. 2.70 pode ser posta na forma,
B = µ0 (H + M ) = µ0 (1 + χm ) H
Isto é,
|
{z
µ
}
B = µH
(2.76)
O coeficiente µ é a permeabilidade magnética do meio. É também útil definir
a permeabilidade relativa, µr = µµ0 = 1 + χm .
Podemos ainda concluir das equações anteriores que num meio em que se
tenha B = µH, com µ constante, (nem sempre é assim), visto que ∇ × H =
j ℓ , então
(
∇·B =0
(2.77)
∇ × B = µ jℓ
As equações 2.77 definem univocamente o campo B num meio de permeabilidade µ, conforme o teorema de Helmholtz. Nestas circunstancias, as equações
do campo magnético num meio material são portanto as mesmas que no
vazio, substituindo simplesmente µ0 → µ nas respectivas propriedades. Esta
conclusão é porém de âmbito limitado, pois há muitos casos com interesse
prático que não satisfazem a eq. 2.76.
Na tabela 2.2 indicam-se a tı́tulo de ilustrativo as susceptibilidades de alguns materiais diamagnéticos e paramagnéticos, bem como a permeabilidade
máxima de alguns ferromagnetes e ferrimagnetes.
2.9.1
Descrição microscópica da magnetização
Como se disse, os materiais são classificados de acordo com a resposta que
evidenciam quando são sujeitos a um campo magnético externo; nomeadamente, são:
29
Repare-se na definição: não é M = χm B, mas sim M = χm H (!), sendo a definição
de tal modo que M ∝ H ∝ iℓ .
48
CAPÍTULO 2. MAGNETOSTÁTICA
Tabela 2.2: Susceptibilidade magnética de alguns materiais diamagnéticos e paramagnéticos a 20o C; e permeabilidade máxima relativa, µmax
, de alguns ferromagr
netes e ferrimagnetes macios (neste caso opta-se por µr em vez da χm , face aos
enormes valores desta última, ver § 2.9.1).
material
χm
diamagnéticos
prata
−2.3 × 10−5
ouro
−3.4 × 10−5
cobre
−9.7 × 10−6
água
−9.0 × 10−6
paramagnéticos
alumı́nio
2.2 × 10−5
platina
2.8 × 10−4
FeO
7.2 × 10−3
material
µmax
r
ferromagnéticos
ferro(98.8% puro)
∼ 5000
nı́quel
∼ 600
mumetal(Ni-Fe-Cu-Cr) 1 × 105
Aço-Si
4 × 104
ferrimagnéticos
Fe3 O4 (magnetite)
98
NiZn(ferrite)
640
MnZn(ferrite)
5000
<
• diamagnéticos: se têm χm < 0 (sendo em geral |χm | ∼ 10−4 ). Como
|χm | ≪ 1, um material só é diamagnético se não tiver outras formas de
magnetismo. Os materiais supercondutores entram nesta classe mas
são um caso especial de diamagnetismo perfeito, em que χm = −1.
Têm pois que ser considerados per se dada a sua importância e especificidade;
<
<
• paramagnéticos: se têm geralmente 10−51 ∼ χm ∼ 101 ;
• ferromagnéticos: se têm χm ∼ 50 − 104 . O comportamento ferromagnético é porém complexo e tem que ser analisado especificamente.
As caracterı́sticas dı́spares destes tipos de materiais sugerem desde logo a
existência de fenómenos microscópicos muito diferentes em cada uma destas
categorias. Devemos analisar a sua natureza para perceber as diferenças que
eles evidenciam.
Um campo magnético exterior que seja aplicado a um material atua sobre
as nuvens eletrónicas e induz pequenos dipolos microscópicos. O campo
criado por tais dipolos opõe-se sempre ao campo aplicado e cresce linearmente
com o campo aplicado. Este fenómeno existe em todos os materiais e é
2.9. MEIOS MAGNÉTICOS
49
chamado de diamagnetismo.30 Trata-se porém do efeito mais fraco, pelo que
apenas se consideram diamagnéticos aqueles materiais que não exibem outro
tipo de magnetismo, mais intenso, de outro tipo.
Os materiais ditos magnéticos têm dipolos magnéticos microscópicos permanentes, que existem espontaneamente na sua constituição. Trata-se essencialmente de dipolos magnéticos (de spin) de electrões atómicos desemparelhados. Verifica-se haver casos em que, na ausência de qualquer campo
exterior, esses dipolos microscópicos se orientam aleatoriamente em todas
as direções do espaço, e casos em que as direções de dipolos vizinhos estão
acopladas, havendo domı́nios finitos (com ∼ 1011 dipolos), em que esses dipolos apontam todos numa mesma direção e sentido.
Os materiais sem domı́nios magnéticos são os chamados materiais paramagnéticos, os outros constituem a classe dos ferromagnetes. Estes últimos,
porém, tornar-se-ão paramagnéticos acima de determinada temperatura,
quando a energia térmica for bastante para se sobrepor e apagar o alegado
acoplamento entre dipolos magnéticos.
A ação de um campo exterior sobre um material paramagnético fará que
tendencialmente os seus momentos magnéticos microscópicos se orientem no
sentido do campo aplicado. Este efeito cresce com a intensidade do campo
aplicado e é fortemente dependente da temperatura, pois a agitação térmica
sobrepõe-se ao alinhamento dos dipolos.
O momento magnético de spin
O spin é uma propriedade quântica intrı́nseca de cada partı́cula, (quiça a mais
estranha de todas), à qual está associado um momento dipolar magnético. O
spin de um electrão tem apenas duas projeções possı́veis em qualquer direção,
sendo uma simétrica da outra e geralmente indicadas por ↑ e ↓. O spin dos
electrões atómicos é a principal fonte de magnetismo dos materiais ditos
magnéticos (o momento angular orbital dos electrões também contribui).
30
O prefixo dia vem do grego e significa oposto, (”diametralmente oposto”é um
pleonasmo!).
O fenómeno subjacente é intrinsecamente quântico, mas uma breve descrição clássica
não faz mal e ajuda a perceber a sua génese. Um electrão com velocidade v fica sujeito à
força de Lorentz F = qv × B. Como F ⊥ v, a força é centrı́peta e o movimento circular,
para determinado campo B. Ora, o movimento circular, de raio a, de uma carga q = −e
corresponde a um momento magnético, m = iπa2 m̂ = −e2πa
πa2 B̂. Isto é, o momento
v
induzido, m, (e portanto M ) é oposto ao campo B aplicado. Ou seja, o diamagnetismo
caracteriza-se por ter χm < 0, mas é um efeito geralmente muito pequeno.
50
CAPÍTULO 2. MAGNETOSTÁTICA
À escala microscópica, os electrões atómicos obedecem ao conhecido
princı́pio de exclusão de Pauli: − “dois electrões não podem coexistir estando ambos exatamente no mesmo estado”; se ocupam a mesma orbital
atómica então têm spins opostos. Por conseguinte, em princı́pio, só são materiais magnéticos aqueles que tiverem nuvens atómicas e moleculares com
um número ı́mpar de electrões.31
Assim, se dois electrões de um átomo tiverem spins paralelos estarão
em média mais separados do que se tiverem spins opostos, por força do
princı́pio de exclusão de Pauli. Por conseguinte, a energia média de repulsão eletrostática é menor se os spins forem paralelos, comparativamente
à configuração de spins opostos. Este acoplamento entre spins é a chamada
interação de troca, a qual expressa, efetivamente, a interação eletrostática
entre partı́culas idênticas carregadas, quando próximas.
Se os electrões pertencerem a átomos individuais, normalmente a interação de troca favorece a configuração de spins paralelos, que é a que
tem menor energia eletrostática. Em nı́veis atómicos incompletos os poucos
electrões tendem a ocupar orbitais diferentes, com spins paralelos entre si
(regra de Hund). Se os átomos formarem moléculas, os electrões formam
orbitais moleculares às quais se aplicam os mesmos argumentos anteriores
quanto ao emparelhamento dos spins dos electrões por via da interação de
troca. Por exemplo, a molécula de O2 tem alguns electrões com spins paralelos e portanto tem momento magnético não nulo. Por isso o oxigénio
molecular é paramagnético. Mas o hidrogénio molecular, H2 é diamagnético
porque na configuração de menor energia os dois electrões da molécula têm
spins antiparalelos.
Paramagnetismo
Nos materiais paramagnéticos os átomos (ou moléculas) têm momento
magnético não nulo, mas as nuvens eletrónicas estão suficientemente afastadas umas das outras, o suficiente para para que não haja correlação entre
31
No caso dos condutores, os electrões das camadas mais exteriores estão fracamente
ligados aos átomos respectivos, passando a fazer parte do todo colectivo sob a forma de
electrões livres (ou de condução). Esses electrões não contribuem significativamente para o
magnetismo. Assim, as propriedades de condução não parecem determinar as propriedades
magnéticas de um material: p.ex., o cobre é diamagnético, o alumı́nio é paramagnético e o
ferro é ferromagnético. O ferro é um bom condutor, por ter electrões de condução cedidos
ao colectivo pelas orbitais 4s - as mais exteriores. Porém, o magnetismo não vem desses
electrões mas dos electrões das orbitais 3d, as quais estão incompletas.
51
2.9. MEIOS MAGNÉTICOS
as orientações desses dipolos. Quando se sujeita esse material a um campo
externo, esses dipolos orientam-se tendencialmente na direção do campo aplicado, originado uma magnetização proporcional a esse campo externo. A
magnetização varia linearmente com H se o campo for baixo, mas tende
assimptoticamente para um valor de saturação, quando todos os dipolos se
alinharem com H. Este processo é perturbado pela agitação térmica e depende fortemente da temperatura.32
Ferromagnetismo
O ferromagnetismo envolve o alinhamento espontâneo dos momentos magnéticos
atómicos. Entre os elementos que são espontaneamente ferromagnéticos
estão, p.ex., o ferro, cobalto, nı́quel e as terras raras: Gd e Dy, etc... Este
facto sugere desde logo que o ferromagnetismo está associado à existência de
orbitais 3d e 4f incompletas, (vide tabela periódica).
De facto, o que mais caracteriza os ferromagnetes é precisamente o facto
de conterem átomos que têm orbitais interiores parcialmente preenchidas,
com electrões desemparelhados. Os electrões destas camadas interiores não
podem formar pares de spin com electrões de outros átomos vizinhos por ser
grande a distância interatómica (nas terras raras, por exemplo, o raio das
orbitais 4f é cerca de 1/10 da distância interatómica). Mas estão, ainda
assim, suficientemente próximos para que a interação de troca correlacione
as respectivas direções e sentido.
A distância interatómica desempenha um papel fundamental. Se as
distâncias interatómicas forem muito grandes não há correlação entre as orientações dos spins atómicos, tendo-se nesse caso um paramagnete. Mas deve
haver, em princı́pio, uma certa gama de distâncias em que a interação de
troca introduz uma correlação positiva entre as orientações de momentos
magnéticos vizinhos, originando deste modo uma magnetização espontânea,
32
No caso mais simples, em que se consideram spins de electrões individuais, os spins
estão quantizados: - e só podem ter duas orientações, ↑ e ↓, no sentido do campo e no
sentido inverso, respectivamente. O valor médio dos spins na direção do campo B é pois
+me−mB/kB T − memB/kB T
= m cot
hmi =
e−mB/kB T + emB/kB T
mB
kB T
pois a probabilidade de um dipolo ter energia U = −m · B é proporcional ao fator de
Boltzmann, p ∼ e−U/kB T . A curva f = cot(x) tem uma forma conhecida que descreve
bem o comportamento paramagnético.
52
CAPÍTULO 2. MAGNETOSTÁTICA
como é caracterı́stica dos materiais ferromagnéticos. Eventualmente, para
distâncias interatómicas menores poderá ocorrer a configuração em que momentos vizinhos são simétricos um em relação ao outro, caso em que há um
fenómeno de antiferromagnetismo.
Os materiais ferromagnéticos parecem pois ter a distância interatómica
”certa” que introduz a correlação positiva entre as direções/sentido dos spins.
Como se disse acima, esta correlação positiva entre os spins de um ferromagnete é devida à interação de troca, que combina, grosso modo, a repulsão
eletrostática e o princı́pio de exclusão de Pauli. A energia desta interação é
pois da escala de energias da interação eletrostática. A energia de repulsão
eletrostática entre dois destes electrões, separados por cerca de r = 2 Å, é
1 e2
Ue = 4πǫ
∼ 1 eV. Por conseguinte, se o ferromagnete for aquecido, e a
0 r
energia térmica média for da ordem de kB T ∼ Ue , então as colisões térmicas
sobrepõem-se à interação de troca e ele torna-se um paramagnete. A temperatura crı́tica a que isso ocorre é a chamada temperatura de Curie, Tc , e
depende do material (e.g. o Fe tem Tc ≃ 1000o C, que corresponde efetivamente a uma energia térmica média, kB Tc ∼ 0.1 eV).
Domı́nios magnéticos
A energia de interação dipolar magnética entre dois dipolos magnéticos, m1
e m2 , à distância r um do outro é, (ver § 2.8), Um = −m2 · B 1 , onde
µ0
B 1 = 4πr
3 [3(m1 · r̂1 )r̂1 − m1 ] é o campo criado pelo dipolo m1 , (ver eq. 2.56).
Para distâncias r ∼ 2 Åe para m1 = m2 = µB ≈ 10−23 J/T (µB é o magnetão
de Bohr do spin do electrão), a energia magnética de dois dipolos magnéticos
paralelos é Um ∼ 10−4 eV; logo muito menor que a energia da interação de
troca que faz alinhar os spins, que é da ordem de Ue ∼ 1 eV. A interação
dipolar magnética não tem pois relevância no que concerne ao alinhamento
dos dipolos magnéticos atómicos. Todavia, é esta interação magnética que
determina a formação de domı́nios magnéticos no material.
As nuvens atómicas são efetivamente distribuições de carga que decrescem exponencialmente com a distância ao núcleo. A interação de troca
é pois essencialmente local, pois está associada à sobreposição das nuvens
eletrónicas. Consequentemente, a média distância a interação entre grupos de
dipolos é dominada pela interação dipolar magnética, dado que esta decresce
polinomialmente com a distância, Um ∼ r13 (e portanto mais lentamente que
a exponencial). Visto que a configuração com menor energia magnética é
aquela em que os momentos magnéticos são mutuamente opostos, isso fa-
53
2.9. MEIOS MAGNÉTICOS
0.1 mm
Fe−Si
Fe (monocristal)
Figura 2.24: Domı́nios magnéticos de ferromagnetes (repare na escala): a) materiais policristalinos e b) monocristais.
vorece a formação espontânea de domı́nios magnéticos. Em cada domı́nio
os dipolos são todos paralelos entre si, mas domı́nios vizinhos tendem a ter
magnetizações opostas. Caso o material nunca tenha sido magnetizado, os
domı́nios magnéticos têm orientações tais que a magnetização global é nula,
pois a energia magnética é mı́nima se B = 0 no exterior do material, (ver
eq. 2.46). As fronteiras entre os domı́nios estendem-se preferencialmente por
pontos de imperfeição da rede cristalina do material em causa (ver fig. 2.24).
Se os domı́nios forem solicitados por um campo exterior, se ele for suficientemente forte, as fronteiras desses domı́nios migram ao longo de imperfeições
da rede cristalina, aumentando o volume dos domı́nios com spins no sentido
do campo aplicado, a expensas de outros domı́nios. Em resultado desse processo, cria-se uma magnetização que permanece não nula após se desligar o
campo externo - i.e., obtém-se um magnete. Em geral este efeito é tão mais
significativo quanto menos homogéneo e puro for o material.
Histerese magnética
Um material pode ser magnetizado colocando-o por exemplo no interior de
um solenoide ou toroide percorrido por uma corrente (ver fig. 2.25). O campo
magnético no interior de um toroide vazio, de raio a, com N espiras, perN
corrido por uma corrente, i, é B = µ0 ni ϕ̂, onde n = 2πa
é o número de
espiras por metro, e ϕ̂ é o versor angular polar em torno do eixo axial de
simetria.33 O campo H nessa região é pois H = ni ϕ̂. Ou seja, nestas
33
Atendendo à simetria e ausência
de efeitos de bordos, o campo B pode ser obtido
H
facilmente pela lei de Ampère, C B · dℓ = µ0 iN . Pela simetria tem-se: B = B ϕ̂; dℓ =
54
CAPÍTULO 2. MAGNETOSTÁTICA
B
i
i
a
B
B
Figura 2.25: O campo B no interior de um toroide.
condições, o campo H é dado diretamente pela corrente i, o que o torna
muito conveniente do ponto de vista experimental, (é até comum exprimir
H em unidades de ampere.voltas/metro).
Se introduzirmos um material magnético no interior de um toroide (ou
bobine), onde o campo é H, vai haver magnetização desse material. A susceptibilidade magnética, (que é definida como χm = M
) mede efetivamente
H
o quociente entre a resposta que se obtém e aquilo que põe. A experiência
mostra que:
i) materiais diamagnéticos têm comportamento linear, mas fraco;
ii) que os materiais paramagnéticos são aproximadamente lineares se o
campo for fraco, mas depois saturam e afastam-se da linearidade; e
iii) que os materiais ferromagnéticos (e antiferromagnéticos) têm comportamento complexo, fig. 2.26). Neste caso, o comportamento não é apenas função do campo H aplicado, mas depende também da história
magnética desse material.
Representando a magnetização de um ferromagnete, M , em função de H,
obtém-se uma curva de histerese como a da fig. 2.26. Mas a histerese também
pode ser representada entre B e H, pois a curva de B vs H é semelhante
à curva M vs H. De facto, para campos baixos, como χm ≫ 1, então
M = χm H e B = µ0 (1 + χm )H ≈ µ0 χm H. Para campos elevados M satura e
fica M ≈ Ms , enquanto que B = µ0 H + µ0 Ms , (ver nota da pag. 56). Assim,
∼
∼
no intervalo −Ms < H < Ms , B/M ∼ µ0 , e os planos (M, H) e (B, H)
diferem essencialmente num fator de escala - a forma é a mesma.
55
2.9. MEIOS MAGNÉTICOS
M
B
0
0
H
H
b)
a)
Figura 2.26: Curvas de histerese de um material ferromagnético: a) M em função
de H e b) B em função de H. A linha do meio é a curva de primeira magnetização.
Note como ambas as representações exibem formas semelhantes.
B
Br
−Hc
1
Hc
−B r
H
Figura 2.27: Curva de histerese de um material ferromagnético. Um material
virgem não tem magnetização inicial, começa na origem e percorre a curva de
primeira magnetização (curva 1). Se a intensidade do campo H aumentar para
além de certo valor, o processo torna-se irreversı́vel e parte da magnetização permanece: em desligando H fica uma magnetização remanescente, Mr que origina
o campo remanescente, Br = µ0 Mr . É necessário aplicar um campo coercivo
de sinal contrário, Hc , para a anular o campo remanescente. Porém, em geral
a magnetização remanescente só será anulada por aproximações sucessivas, (ver
fig. 2.31).
56
CAPÍTULO 2. MAGNETOSTÁTICA
Um material virgem, que nunca tenha sido magnetizado, segue a curva 1
da fig. 2.27, conhecida como curva de primeira magnetização. Ao ser sujeito a
um campo externo aumentam os domı́nios com dipolos na direção/sentido do
campo aplicado (ou em direções de fácil magnetização próximas da direção
do campo), a expensas dos outros domı́nios. Este deslocamento das fronteiras
é facilitado pelo facto de aı́ se verificar uma transição suave da orientação
dipolar (ver fig. 2.28). Basta pois uma pequena rotação de dipolos para
fazer migrar a fronteira. Esse processo é reversı́vel enquanto o campo for
fraco - desligado o campo H, a magnetização volta a ser zero. Porém, se
o campo for aumentado, os limites dos domı́nios magnéticos expandir-se-ão
de forma irregular ao longo de pontos de imperfeição da rede cristalina e
esse processo torna-se irreversı́vel. Se o campo for aumentado ainda mais
tem inı́cio a rotação dos dipolos dos últimos domı́nios ainda desalinhados
e a magnetização satura ao dar-se o alinhamento completo dos dipolos do
material, (ver fig. 2.29).34
Se o campo exterior for suficientemente intenso e a seguir for desligado,
as fronteiras que migraram já não regressam espontaneamente aos limites
originais, ficam presas nas irregularidades da rede cristalina e o processo
é irreversı́vel. O material fica pois magnetizado, com uma magnetização
remanescente, Mr , correspondente à curva de histerese em que se encontrava
quando o campo H foi desligado (ver figs. 2.27 e 2.31). Criou-se um magnete
permanente.35
0 iN
adϕϕ̂; portanto B = µ2πa
ϕ̂.
34
Ao ser atingida a saturação, os dipolos estão todos alinhados, pelo que M = Ms ∼
nm, onde m é o momento magnético de cada átomo e n é o número de dipolos por
metro cúbico. Cada momento magnético de spin é aproximadamente um magnetão de
Bohr, m ∼ µB ≈ 10−23 J/T; a densidade de dipolos é aproximadamente 1 mole/cm3
ρ
NA , com A a massa atómica, ρ a densidade e NA o número
(mais exatamente, n = A
de Avogadro); pelo que n ∼ 1 × 1023 /cm3 . Ou seja, a magnetização de saturação tem
valores da ordem de Ms ∼ 106 J/Tm3 , o que corresponde a um campo magnético da
ordem de 1 T, (i.e., µ0 Ms ∼ 1 T). No limite em que a magnetização permanente é a
magnetização de saturação, B ≈ µ0 (H + Ms ) e a permeabilidade limite é µlim ≈ µ0 . Os
materiais magnéticos duros, como os magnetes de Ne-Fe-B, têm tipicamente valores de
µ0 Ms ≃ 1.5 T e µlim ≃ 1.05µ0 , (ver fig. 2.32).
35
A magnetização só voltará a ser nula se um campo de sentido contrário lhe for aplicado,
forçando nova deslocação dos domı́nios em ciclos sucessivos de desmagnetização, fig. 2.31.
O material também pode ser desmagnetizado aquecendo-o acima da temperatura de Curie,
à qual se torna paramagnético. Ao arrefecer readquire as propriedades ferromagnéticas,
organizando-se em novos domı́nios, que se orientarão de aleatoriamente, sem nenhuma
relação com os domı́nios originais (fez-se-lhe reset).
57
2.9. MEIOS MAGNÉTICOS
Figura 2.28: Na fronteira entre domı́nios magnéticos há uma zona de transição.
a)
b)
H
c)
H
d)
H
M
d)
c)
a)
b)
H
Figura 2.29: O processo de magnetização de um ferromagnete. O processo é
reversı́vel se o campo aplicado for baixo; campos mais elevados introduzem alterações irreversı́veis de que resultam magnetizações permanentes. a) campo zero;
b) campo baixo: deslocação reversı́vel das fronteiras dos domı́nios; c) campo elevado: deslocação irreversı́vel das fronteiras através de irregularidades estruturais; d) campo muito elevado: rotação dos últimos dipolos ainda não alinhados;
saturação.
58
CAPÍTULO 2. MAGNETOSTÁTICA
É pois evidente que um material ferromagnético não responde sempre da
mesma maneira a um mesmo campo aplicado - este material tem memória da
sua história magnética e a sua resposta depende disso. Consequentemente,
só tem significado considerar a permeabilidade de materiais ferromagnéticos
que não estejam já magnetizados, i.e., que não tenham história magnética.
Como a relação entre B e H não é linear num ferromagnete, é necessário
especificar qual é o entendimento que se tem quando se refere a permeabilidade de um ferromagnete. Geralmente a permeabilidade indicada para um
ferromagnete é a máxima permeabilidade, µmax , i.e., o declive da linha que
parte da origem e é tangente à curva de primeira magnetização no ponto
B
em que H
é máximo, ver fig. 2.30. Também se definem a permeabilidade
∆B
inicial, µini , a permeabilidade
diferencial média, µd = ∆H
, a permeabilidade
dB
de recuo, µrec = dH
, etc.
H=0
Há dois parâmetros da curva de histerese que são particularmente relevantes (ver fig. 2.27):
i) a coercividade, Hc , que mede de algum modo a facilidade em magnetizar/desmagnetizar um material e;
ii) a remanescência, Br , que traduz a capacidade de um material que
foi magnetizado reter a magnetização.
Nos magnetes permanentes ambas as quantidade são elevadas (ver fig. 2.32).
Dependendo da área da curva de histerese estes materiais magnéticos são
normalmente agrupados em duas grandes categorias:
i) materiais magnéticos duros, se têm uma grande área de histerese.
Estes materiais têm também, em geral, elevada remanescência, elevada
coercividade e uma permeabilidade de recuo µrec ≈ µ0 , o que significa
que a sua magnetização remanescente é quase tanta quanta a magnetização de saturação. São estes materiais que formam os melhores
magnetes permanentes.
Na fig. 2.32 mostra-se a histerese de dois destes materiais: - um magnete de CoPt e um de Nd-Fe-B, um dos magnetes mais intensos que
atualmente se fazem.
Mas a magnetização dos magnetes comuns também se vai reduzindo com o tempo por
efeito das flutuações térmicas à temperatura ambiente (e eventualmente devido a processos
de oxidação do próprio material).
59
2.9. MEIOS MAGNÉTICOS
µma
x
B
ec
Br
µ
µr
µinic
curva virgem
permeabilidade
µ=B
H
−Hc
H
saturação
µo
µ inicial
0
H
b)
a)
Figura 2.30: Curva de magnetização de um ferromagnete. A permeabilidade
magnética é uma função da amplitude do campo; indicam-se a permeabilidade
máxima e a permeabilidade inicial da curva de primeira magnetização e a permeabilidade de recuo, µrec . Após a saturação, M = Ms ∼ 106 A/m, é constante (ver
nota da pág. 56), e, B = µ0 H + µ0 M s , (onde µ0 Ms ≈ 1 T). Isto é, no limite
dos grandes campos o quociente B/H → µ0 e portanto a permeabilidade limite é
µlim ≈ µ0 . Num material magnético muito duro, µrec ∼ µ0 , (cf. fig. 2.31).
ii) materiais magnéticos macios, se têm baixos valores de Br e Hc e
reduzida área de histerese. Têm também geralmente elevada permeabilidade e são facilmente desmagnetizáveis. Por isso alguns destes
materiais, (os de menor condutividade eléctrica), são utilizados nos
núcleos de electromagnetes, transformadores e motores eléctricos.
Energia de um ciclo de histerese
A área da curva de histerese do gráfico (H,B) da fig. 2.26 é igual à energia dissipada em cada ciclo completo por unidade de volume de material
magnetizado. No vazio, a densidade de energia magnética é
uB =
1 2
B
2µ0
Uma variação infinitesimal do campo, dB, traduz-se pois numa variação da
densidade de energia em cada ponto,
duB =
1
B dB = B dH,
µ0
(2.78)
60
CAPÍTULO 2. MAGNETOSTÁTICA
B
H
Figura 2.31: Ciclos de histerese de um ferromagnete. Para desmagnetizar um
ferromagnete magnetizado ou, i) se aquece acima de Tc , ou ii) se fazem múltiplos
ciclos de magnetização/desmagnetização, reduzindo progressivamente a amplitude
do campo H; o material percorre então ciclos de histerese sucessivamente menores,
até desmagnetizar totalmente.
µο M
(T)
1.5
M
1.0
0.5
−3
−2
−1
1
−0.5
2
3
H (MA/m)
0
H
−1.0
−1.5
a)
b)
Figura 2.32: A histerese de magnetes permanentes duros. Notem-se os elevados
valores de remanescência e de coercividade e ainda o facto de a magnetização
de saturação, Ms , ser da ordem da coercividade, Ms ∼ Hc e de a magnetização
remanescente ser próxima do máximo possı́vel, Mr ∼ Ms . a)Histerese de um
magnete de Nd-Fe-B; b) histerese de um filme de Co-Pt de um disco duro de
computador, [AZoM.com].
61
2.9. MEIOS MAGNÉTICOS
(pois no vazio B = µ0 H). Porém, a equação anterior também se aplica à
matéria, visto que não tem qualquer referência às propriedades do meio.36
Isto é, a energia dissipada (são processos irreversı́veis) no material, por ciclo
de histerese e por unidade de volume, é igual à área do respectivo ciclo de
histerese, no plano (H, B),
∆uB =
H
B dH
(2.79)
ciclo
Esta perda de energia é relevante sobretudo em sistemas de corrente alternada, em que o ciclo de histerese é percorrido repetidamente com a frequência
da corrente, f . Nesse caso, a potência dissipada por histerese por metro
B
cúbico de ferromagnete é P = ∆u
= f ∆uB . Um transformador dissipa
∆t
energia só por estar ligado à tomada; o consumo energético passivo pode
ser significativo em aparelhos de má qualidade (não somente pelas perdas de
histerese).
Antiferromagnetismo e ferrimagnetismo
Algumas estruturas cristalinas apresentam correlações negativas entre as orientações de dipolos vizinhos. Nesse caso os spins de átomos contı́guos da
estrutura cristalina estão antiparalelos, originando um tipo especı́fico de magnetismo chamado antiferromagnetismo (p.ex. no MnFe2 ).
O ferrimagnetismo é um caso especial de antiferromagnetismo em que os
dipolos num sentido são mais fortes que os outros, ocorrendo por isso magnetização espontânea. As ferrites são uma famı́lia importante de ferrimagnetes. Muitas das ferrites são isoladores eléctricos, o que é uma caracterı́stica
relevante para muitas aplicações práticas. Os ferromagnetes propriamente
ditos são geralmente pouco adequados para aplicações envolvendo campos
oscilatórios, devido às perdas por correntes induzidas de Foucault, nomeadamente em núcleos de transformadores, em componentes de geradores de microondas, etc... Ademais, as ferrites são bastante mais resistentes à corrosão,
já que muitas delas são óxidos. Por estas razões as ferrites são os materiais
mais escolhidos para fazer os núcleos dos referidos equipamentos.
36
De facto, calculando a densidade de energia magnética na matéria, tem-se um =
2
· B + M · B) = B
2µ0 , (pois M = B/µ0 − H).
1
2 (H
62
CAPÍTULO 2. MAGNETOSTÁTICA
B
M
km
Figura 2.33: Linhas de campo de um magnete permanente cilı́ndrico com magnetização uniforme M = M0 ẑ. A magnetização pode ser descrita como sendo devida
a correntes de magnetização superficiais, km .
2.9.2
Magnetes permanentes - análise de uma barra
magnética
Um magnete permanente tem magnetização per se, sem requerer a presença
de qualquer outro campo. Não há correntes livres, apenas magnetização,
sendo esta a única causa do campo magnético. Esse facto justifica por si o
interesse em discutir a sua especificidade.
Seja o magnete cilı́ndrico de raio R e comprimento ℓ da fig. 2.33, em que
a magnetização é por hipótese uniforme, na direção axial, M = M0 ẑ. O
campo em cada ponto é dado pela eq. 2.70, B = µ0 (H + M ). No exterior
. Em pontos do
do magnete M = 0, e portanto na região exterior H = B
µ0
interior, como M é uniforme, ∇ × M = 0 = j m ; ∇ · M = 0. Para além
disso, ∇ × H = ∇ × B = 0 e ∇ · M = −∇ · H = 0 em todo o espaço.
As condições de fronteira nas superfı́cies do cilindro são:
rotS M )r=R = km = M0 ϕ̂
divS M )z=0 = M0
divS M )z=ℓ = −M0
rotS H = 0
rotS B)r=R = µ0 rotS M )r=R = µ0 M0 ϕ̂
Estas equações descrevem a magnetização do cilindro, atribuindo-a a correntes de magnetização superficiais, km , na superfı́cie lateral. O campo
B pode ser calculado facilmente em pontos do eixo, já que é o de um
63
2.9. MEIOS MAGNÉTICOS
i
θ2
B
θ1
z^
B
l
Figura 2.34: O campo magnético em pontos eixo de um solenoide, com comprimento ℓ e N espiras percorridas por uma corrente i, cujo eixo axial coincide com ẑ:
B = µ02ℓiN (cos θ1 − cos θ2 )ẑ. Se for infinito (θ1 = 0, θ2 = π), obtém-se o resultado
conhecido, B = µ02ℓiN ẑ.
solenoide equivalente percorrido por uma corrente superficial km : - em pontos do eixo, B = µ02km (cos θ1 − cos θ2 )ẑ (ver fig. 2.34).37 Na aproximação
de solenoide infinito, tem-se B = µ0 km ẑ = µ0 M0 ẑ no centro do cilindro e
−M ,
B = µ02km ẑ = µ02M0 ẑ nos topos. No interior do magnete, tem-se H = B
µ0
concluindo-se portanto que no centro do cilindro H = 0 e que junto de cada
um dos topos H = − M
, (ver fig. 2.35).
2
Isto é, dentro do cilindro, em particular junto dos topos, H e M são antiparalelos (ver fig. 2.35). Para além disso, a intensidade de H decresce desde
o topo até ao centro do magnete, onde é aproximadamente zero, conquanto
M seja uniforme, por hipótese. Este exemplo mostra de forma eloquente
que há casos, como este, em que M 6= χm H; aliás, de contrário ter-se-ia
χm < 0 e, portanto, um diamagnete (mas os magnetes permanentes são ferromagnetes!). A questão é que neste caso, H não é um campo aplicado
externamente ao material, que vá induzir uma magnetização, mas um caso
evidente em que o campo H é criado pelas correntes de magnetização. Isto
mostra per se e de modo eloquente que as fontes de H não são apenas as correntes livres mas são também, eventualmente, as correntes de magnetização
(ver discussão em § 2.9).
É difı́cil calcular exatamente os campos B e H criados pelo magnete em
todos os pontos. A solução deste problema requer a integração da equação
37
Integrando a lei de Biot-Savart para uma espira da fig. 2.34, obtém-se em pontos
0i
do eixo axial, z, o campo Bz = µ2a
sin3 θ. Um enrolamento de espiras justapostas de
comprimento dz tem uma corrente di = kdz (k é a densidade superficial de corrente) e
kdz
cria portanto o campo dBz = µ02a
sin3 θ, onde dz = − sina2 θ , ver fig. 2.34. Um solenoide
de comprimento finito, compreendido entre θ1 e θ2 , cria o campo Bz = µ20 (cos θ1 − cos θ2 ).
64
CAPÍTULO 2. MAGNETOSTÁTICA
de Laplace, ∇2 A = 0, (pois j = 0), com as condições de fronteira acima
referidas. Resulta assim o sistema de equações acopladas,
∇2 A = 0
B =∇×A
H=B
−M
µ0
div H)
S
z=0 = −M0
divS H)z=ℓ = +M0
(2.80)
divS H)r=R = 0
Estas equações formam um problema complicado, cuja resolução não é trivial.
A solução está representada na fig. 2.35.
É de referir que:
i) no exterior do magnete as linhas de B e H têm a mesma estrutura
vectorial em todos os pontos (pois B = µ0 H);
ii) no interior do material B e H apontam em direções diferentes, quasiopostas;
iii) as linhas de B são sempre linhas que se fecham sobre si próprias;
iv) pelo contrário, as linhas de H têm inı́cio no topo do magnete e vão
acabar na outra extremidade, quer indo por fora quer indo por dentro;
v) H e M têm sentidos (quasi) opostos em muitos pontos do magnete,
mostrando que este é um caso em que claramente M 6= χm H;
vi) este é um caso em que H é criado por correntes de magnetização!
2.9.3
Aplicações
Os materiais ferromagnéticos têm aplicação diversa, nomeadamente nos
chamados circuitos magnéticos, nos núcleos de bobines em transformadores.
Com efeito, sendo facilmente magnetizáveis, tais materiais potenciam o
campo criado pela bobine, fazendo-o aumentar alguns milhares de vezes
(efeito que, como vimos, é devido ao alinhamento dipolar na direção do
campo externo gerado). Mas, para além disso, a presença do material modifica a orientação das linhas de campo B, concentrado-as (ver fig. 2.36).
65
2.9. MEIOS MAGNÉTICOS
H
H
B
B
H
M
M
Figura 2.35: Linhas de campo magnético de um magnete permanente cilı́ndrico.
As linhas de B são sempre linhas que se fecham sobre si próprias. Já as linhas de
H têm inı́cio no topo do magnete e vão acabar na outra extremidade. Note que
dentro do material H e M têm sentidos quase opostos.
Por conseguinte, as perdas de fluxo que se verificam no acoplamento entre
dois circuitos magnéticos são muito menores se intervier um núcleo ferromagnético. No caso dos transformadores, minimizam-se as perdas de fluxo,
fazendo que as linhas de campo magnético fiquem contidas dentro do material
(ver fig. 2.37).
Como acima se disse, os núcleos ferromagnéticos dos transformadores,
etc..., são geralmente materiais ferrimagnéticos, em particular ferrites, dada
a sua baixa condutividade (ver tabela 2.1), porque isso reduz as correntes
induzidas de Foucault e portanto as perdas ohmicas associadas. Ademais,
geralmente lamina-se o material do núcleo de forma a minimizar ainda
mais essas correntes induzidas. As ferrites têm além do mais caracterı́sticas
magnéticas macias, apresentando reduzida área de histerese, o que reduz as
perdas de energia por histerese. Ambos os aspetos anteriores são determinantes para a eficiência de um circuito em que a corrente oscila rapidamente,
como é o caso de um transformador.
66
CAPÍTULO 2. MAGNETOSTÁTICA
B
B
b)
a)
Figura 2.36: Linhas de campo magnético, B, de uma bobine: a) sem núcleo; b)
com um núcleo ferromagnético. O material não só amplia o campo como concentra
as suas linhas, reduzindo as perdas de fluxo magnético em muitas aplicações.
B
~
Figura 2.37: Representação esquemática de um transformador.
As linhas
de campo estão essencialmente confinadas no núcleo ferroso, entre os circuitos
primário e secundário, sendo assim reduzidas as perdas de fluxo magnético.