Unidade II - Oscilação
fig. II.1. Exemplos de oscilações e osciladores.
1. Situando a Temática
O propósito desta unidade temática é o de introduzir algumas ideias
sobre oscilação. Estudaremos o movimento harmônico simples, o oscilador
harmônico simples, que pode ser modelado por um sistema acoplado massamola, a energia de um oscilador, o pêndulo simples e outros sistemas
oscilantes, como por exemplo, o pêndulo físico. Também estudaremos as
oscilações amortecidas e forças. A fig. II.1 mostra o gráfico de um sistema
oscilante e uma engrenagem oscilante.
2. Problematizando a Temática
Um dos assuntos de mais importância na física é aquele que estuda
os fenômenos oscilantes. A oscilação está presente na natureza, como o
movimento orbital de um planeta ao redor do Sol, o movimento de rotação
de um CD em um computador, o movimento de vai e vem de um pistão em
uma engrenagem de um automóvel, a vibração de uma corda em uma
guitarra, o movimento vibratório de uma ponte ou edifício, etc.
Quando estudamos em detalhes um sistema acoplado mola-massa, as
equações matemáticas que se desenvolvem para descrever tal sistema são de
grande importância, pois equações análogas são resgatadas na descrição de
todos outros sistemas oscilantes.
Dentre muitos problemas ligados a oscilação de um sistema físico,
pode ser citado um problema prático que existir na mecânica de automóveis:
as forças dos gases da combustão geram torque pulsante na árvore de
manivelas e no volante, em regimes de baixas rotações, onde se podem
detectar com mais evidência essas oscilações de torção. Essas oscilações são
transmitidas através da embreagem ao sistema de transmissão do veículo. As
engrenagens livres da transmissão recebem essas oscilações, gerando
vibrações entre os dentes das engrenagens livres, resultando em ruídos em
regimes de marcha lenta. A solução desse problema surge através de um
sistema de amortecimento de molas e um volante bi-massa. Esse é um
exemplo de oscilação ligada à indústria automobilística. Veja a fig. II.2 para
ter uma ideia do problema.
21
fig. II.2. Exemplo de um sistema oscilante na indústria automobilística.
3. Movimento Harmônico Simples
O movimento de uma partícula ou de um sistema de partículas é
periódico se ele é repetido em intervalos regulares de tempo. Um movimento
periódico de vai e vem de um corpo é chamado de oscilação. Existem muitos
movimentos dessa natureza como, por exemplo, o movimento de um pistão,
de um pêndulo, de uma corda de guitarra, etc.
Um movimento é dito movimento harmônico simples (MHS) se a
posição como função do tempo tem a forma
x A cos(t )
eq. II.1
onde A, e são constantes. A quantidade A e chamada de amplitude do
movimento, que é a distância entre o ponto médio (x = 0) e o ponto de
retorno ( x = A ou x = -A); é a frequência angular, que está relacionado
ao período do movimento, isto é,
T
2
eq. II.2
Enquanto que a frequência do movimento,
1
2 T
eq. II.3
A unidade de frequência é dada em ciclos por segundo e de
frequência angular radianos por segundo. A unidade de frequência
usualmente é o Hz (hertz): 1 hertz = 1 Hz = 1 ciclo por segundo. O
argumento do cosseno, (2t ) é chamado de fase e é dita fase
constante. Essa constante determina em que tempo a partícula alcança o
22
ponto de deslocamento máximo. Isto é, t max 0 ou t max
. O
que nos mostra que a partícula alcança o ponto de deslocamento máximo em
- / , antes de t = 0.
Note que x A cos(t ) Asen[t ( / 2)] , pode ser
representado por uma função seno quando mudamos a fase constante. Por
outro lado,
x A cos(t ) ( A cos ) cos t ( Asen ) sent , expressando o
MHS como uma superposição de funções senos e cossenos.
Existe uma simples relação geométrica entre o MHS e MCU –
movimento circular uniforme. Considere uma partícula movendo-se com
uma velocidade angular sobre um círculo de raio A. Se em t = 0 a posição
angular dela é , então a posição angular num tempo depois é
t , as coordenadas do ponto do círculo são
x A cos(t ) e y Asen(t ) A cos(t / 2) ,
donde vemos que x e y possuem MHS.
4. O Oscilador Harmônico Simples
O Oscilador Harmônico Simples consiste de uma massa acoplada
uma mola de massa ideal que obedece a lei de Hooke.
fig. II-3. Deslocamento de uma
massa ligada a uma mola de acordo
com a lei de Hooke.
Usando a segunda lei de Newton obtemos a equação de movimento da massa
do sistema acoplado massa-mola
m
d 2x
kx
dt 2
eq. II.4
Podemos resolver essa equação através de equações diferenciais, mas vamos
deixar para um curso de mecânica geral esses cálculos. Sabemos que, dadas
as condições iniciais de eq. II.4, podemos garantir a existência da solução da
equação e, nesse caso, determinar o movimento.
23
Da eq. II.1 calculando-se a primeira e segunda derivadas com relação ao
tempo obtemos
m
d 2x
2 x
2
dt
eq. II.5
Assim comparando eq. II.4 e eq. II.5 concluímos que o movimento massamola é um MHS com uma frequência angular
k
m
eq. II.6
Para as condições iniciais, t = 0, teremos, a velocidade v v0 e a posição
x x0 , onde x 0 A cos e v0
k
Asen . Daí e do fato do sistema
m
massa-mola ser um MHS
x A cos(
k
k
m
k
t ) x0 cos(
t ) v0
sen(
t)
m
m
k
m
eq. II.7
que expressa o movimento em termos das condições iniciais.
5. Energia do Oscilador
A energia cinética de uma massa m em um MHS é: K =
K
1
2
1 2
mv ,
2
m[ A sen (t )]2
1
1
mA2 2 sen 2 (t ) kA2 sen 2 (t )
2
2
eq. II.8
Enquanto a energia potencial associada à força restauradora da mola, que é
conservativa, é
U
1 2 1
1
kx k[ A cos(t )]2 kA 2 cos 2 (t )
2
2
2
O valor máximo para K e U é igual a
eq. II.9
1 2
kA e o valor mínimo é 0. Quando x
2
= 0, K é máxima pois a velocidade é máxima nesse ponto, enquanto U = 0.
Quando a massa alcança o ponto de retorno K = 0 e U é máxima, isto para
um deslocamento máximo.
Como a força é conservativa, E = K + U é uma constante de
movimento. Note que podemos ver facilmente
E
24
1 2
kA
2
eq. II.10
Note que o deslocamento máximo e velocidade máxima podem ser dados
em termos de E
2E
k
x max A
v max
e
2E
m
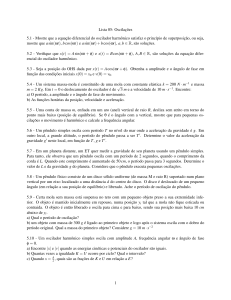
Vamos analisar a curva de potencial para um MHS U
eq. II.11
1 2
kx
2
que podemos ver no gráfico ao lado:
Note que os valores máximos para os deslocamentos dependem
do valor de E mostrado no gráfico como o nível de energia.
Aumentando-se a altura do nível de energia a amplitude de
oscilação aumenta, visto que a distância entre os pontos de
retorno aumenta.
fig. II. 4. Curva de potencial
do MHS como função de x
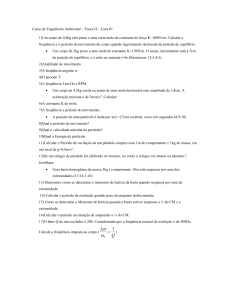
6. Pêndulo Simples
O pêndulo simples consiste de uma partícula sustentada por um fio
inextensível de massa desprezível. Ele oscila em torno da posição de
equilíbrio, como podemos ver na fig. II.5.
Como a partícula e o fio estão dispostos
como uma unidade rígida, o movimento pode ser
considerado como uma rotação em torno de um eixo
localizado no ponto de suspensão, então
I mgLsen
mL2 mgLsen mL2
gsen L
d 2
dt 2
d 2
dt 2
fig. II.5. Diagrama de um pêndulo simples.
eq. II.11
Para pequenas oscilações do pêndulo, sen (isto pode ser entendido
através da série de Taylor para função f ( ) sen sobre o ponto 0 ) a
eq. II.11 torna-se,
g L
d 2
dt 2
eq. II.12
Veja que esta equação tem a mesma forma da eq. II.4 e, dessa forma, é um
MHS, isto é,
A cos(t )
eq. II.13
25
com
frequência
angular de um pêndulo simples igual a
Enquanto
o
período
é
dado
por
g / L .
T 2 / 2 L / g . Notemos que o período somente depende do
comprimento do fio e da aceleração da gravidade e não da massa da partícula
e amplitude de oscilação.
A energia de cinética pode ser vista como,
K
1 2 1 d 2 1 2
I I [ ] mL [Asen(t )] 2
2
2 dt
2
K
A energia
gravitacional,
1
mgLA 2 sen 2 (t )
2
potencial
é
eq. II.14
simplesmente
a
energia
potencial
U mgh mg ( L L cos ) mgL(1 cos ) , mas se é suficiente
pequeno, levando em conta uma aproximação através da série de Taylor
1
2
para função f ( ) cos sobre o ponto 0 , cos 1 2 , portanto
a energia potencial U
1
mgL 2
2
1
mgLA 2 cos 2 (t )
eq. II.15
2
1
Notemos que E K U mgLA 2 const. . Assim E é uma constante
2
U
de movimento.
7. Pêndulo Físico e Pêndulo de Torção
Nós vimos na secção anterior que o pêndulo simples comporta-se
como um MHS para pequenas amplitudes de oscilação, próximas à posição
de equilíbrio. Muitos outros sistemas físicos comportam-se dessa forma. Isto
é, a força efetiva é usualmente proporcional ao deslocamento. Vejamos isto
através da série de Taylor para uma F = F(x), onde x é o deslocamento.
1 d 2F
dF
2
F ( x ) F (0 )
x 2 x ...
dx
2
dx
x0
x0
eq. II.16
Se o movimento é em três dimensões cada componente da força tem
um desenvolvimento de Taylor semelhante nas respectivas direções.
Podemos ter x = quando o deslocamento for angular.
Para x = 0, no ponto de equilíbrio, F(0) = 0 e se o deslocamento é
suficientemente pequeno os termos de ordem superior ou igual a dois podem
ser desprezados quando comparados aos de primeira ordem. Assim,
dF
F ( x)
x
dx x 0
26
eq. II.17
dF
vemos que a lei de
dx x 0
Se tivermos F ( x) kx , onde k
Hooke é uma aproximação geral que descreve forças para pontos próximos
ao de equilíbrio. É fácil ver, analisando a derivada de F com relação a x, que
podemos verificar que teremos um equilíbrio estável quando k 0 (a força
é restauradora), equilíbrio instável quando k 0 (a força é repulsiva),
enquanto x = 0 teremos um equilíbrio neutro.
Um pêndulo físico consiste de um corpo sólido que está suspenso
por um eixo. Sob a influência da gravidade, o corpo tem um movimento de
vai e vem. Podemos ver na fig. II.6 o diagrama de um pêndulo físico.
A equação de movimento é aquela para um corpo
rígido,
I I
d 2
, por um lado MgLsen e assim
dt 2
obtemos a equação de
suficientemente pequenas,
MLg I
movimento
d 2
dt 2
para
oscilações
eq. II.18
A solução dessa equação representa um MHS com frequência
fig. II.6. Diagrama de um pêndulo físico.
MgL / I .
O pêndulo de torção é muito parecido com o pêndulo
físico, entretanto a força de restituição (peso) é substituída por
um tipo de mola espiral. Sob a suposição que o deslocamento do pêndulo de
torção da posição de equilíbrio seja suficientemente pequeno, o torque é
proporcional ao deslocamento angular
eq. II.19
onde é a constante de torção da mola ou
Nm/rad. A equação de movimento do corpo
I
d 2
dt 2
fibra, com unidades
rígido é
eq. II.20
Que é novamente a equação de um oscilador
frequência é dada por
que possui MHS, cuja
/ I . Podemos ver exemplos de
pêndulos de torção na
figura ao lado.
8. Oscilações Amortecidas e Oscilações Forçadas
Em um oscilador real, digamos um pêndulo, existem forças externas,
por exemplo forças de atrito. Se o pêndulo começa a se movimentar com
uma amplitude ao longo do tempo essa amplitude diminui.
27
A fig. II.8 mostra o deslocamento de um
oscilador com atrito. O movimento resultante é
chamado de movimento harmônico amortecido.
Esse movimento pode ser representado pela
função
_
x A0 e ( b / 2 m )t cos( t )
quando a força de amortecimento bv é
suficientemente pequena e x é solução da
fig. II.8. Linha de universo de uma partícula com
equação
movimento harmônico amortecido.
_
onde
eq. II.21
kx b
diferencial,
dx
d 2x
m 2 ,
dt
dt
k / m b 2 / 4m 2 na eq. II.21.
_
Quando b 2 km em , teremos um amortecimento crítico, o sistema
não oscila mais, retornando para sua posição de equilíbrio sem oscilar.
b 2 km corresponde a um superamortecimento. O sistema não mais
oscila também mas volta para posição de equilíbrio mais devagar do que o
caso anterior. Enquanto para b 2 km o sistema oscila com uma
amplitude que diminui continuamente. Essa condição denomina-se de
subamortecimento.
Um amortecedor de carro é um exemplo de oscilador amortecido,
bem como um dispositivo usado nas raquetes de tênis que diminui as
vibrações.
Nas oscilações amortecidas, a força de
amortecimento não é conservativa, a energia mecânica não é
constante e diminui tendendo a zero ao passar o tempo.
Vamos deduzir a taxa de variação da energia.
Temos que
E
fig. II.9. Exemplos de osciladores amortecidos
1 2 1 2
dE
dv
dx
mv kx
mv kx
como
2
2
dt
dt
dt
dx
d 2x
kx b
m 2
dt
dt
dE
bv 2
dt
eq. II.22
Podemos manter constante a amplitude das oscilações amortecidas
se fornecemos ao sistema um empurrão no final de cada ciclo. Esta força
adicional é chamada de força propulsora.
Quando aplicamos uma força propulsora variando periodicamente
com a um oscilador harmônico amortecido, o movimento resultante é
uma oscilação forçada. A frequência da oscilação da massa é igual a
_
frequência da força propulsora . Veja que . O caso mais simples é
aquele em que a força propulsora é senoidal, isto é, F (t ) Fmax sent .
Novamente não vamos resolver a equação diferencial, deixado para outro
28
curso. A expressão da amplitude de um oscilador forçado em função de é
Fmax
A
2
2
( k m ) b w
2
. Quando
k /m
em
k m 2 = 0,
A Amax .
Quando a amplitude correspondente à oscilação forçada está próxima da
frequência da oscilação natural do sistema, essa amplitude atinge um pico,
dizemos que ocorreu o fenômeno da ressonância. A ressonância de um
sistema mecânico pode ser destrutiva. Em projetos da aviação e de
engenharia este conceito é fundamental. O tratamento matemático da
ressonância é deixado para um curso de mecânica geral.
Exercícios Resolvidos
Exemplo II. 1
Uma espécie de altofalante usado para diagnóstico médico, oscila com uma
frequência de 6,7 MHz . Quanto dura uma oscilação e qual é a frequência angular?
Solução:
1
1
1,5 10 7 s . Por outro lado
6
6,7 10 Hz
2 (2rad / ciclo)( 6,7 10 6 ciclos/s)
=
O período T é dado por
sabemos
que
T
7
4,2 10 rad/s.
Exemplo II. 2
Em um sistema acoplado verificamos que ao puxarmos a mola por um dinamômetro
da esquerda para direita com uma força de 6 N, este produz um deslocamento de
0,030 m. A seguir removemos o dinamômetro e colocamos uma massa de 0,50 kg
em seu lugar. Puxamos a massa a uma distância de 0,020 m e observamos o MHS
resultante. Calcule a constante da mola. Calcule a frequencia, frequencia angular e o
período da oscilação.
Solução:
A força restauradora da mola é -6,0 N, assim k
A
frequência
k
20 rad/s.
m
F
6
200 N / m .
x 0,030
A
frequência
20rad / s
3,2ciclos / s 3,2 Hz
2 2rad / ciclo
1
T 0,31s / ciclo ou simplesmente 0,31 s.
.
angular
O
é
período
Exemplo II. 3
No exemplo anterior coloque m = 0,50 kg, um deslocamento inicial de 0,015 m e
uma velocidade inicial 0,40 m/s. Calcule o período, a amplitude e o ângulo de fase
do movimento. Escreva as equações para o deslocamento, a velocidade e a
aceleração em função do tempo.
29
Solução:
O período é o mesmo pois, para um MHS, este somente depende da massa e de k .
2
A amplitude A ( x0
2
v 0 12
2 ) 0,025m . O ângulo de fase é calculado por
v0
tg 53 0,93rad .
x0
Agora teremos x A cos(t ) = 0,025cos(20t-0,93);
v Asen(t ) 0,50sen(20t 0,93) ;
a 2 A cos(t ) 10 cos(20t 0,93).
Exemplo II. 4
Na oscilação do ex.II.2 coloque x = 0,020 m. Ache a velocidade máxima e mínima
atingidas pela massa que oscila. Ache também a aceleração máxima. Calcule a
velocidade e a aceleração quando a massa está na metade da distância entre o ponto
de equilíbrio e seu afastamento máximo. Qual a energia total, a potencial e a energia
cinética nesse ponto?
Solução:
Da eq. II.10 podemos expressar
v
k
A 2 x 2 . A velocidade máxima
m
acontece quando x = 0 passando a massa da esquerda para direita e assim v = +0,40
m/s. Enquanto a velocidade mínima acontece quando x = 0 passando a massa da
direita para esquerda, v = -0,40 m/s.
k
x . A aceleração máxima se dará para x = -A. Logo a = +8
m
m / s 2 . A aceleração mínima ocorre em x = +A e assim, a = 8m / s 2 .
Para x A / 2 , v 0,35m / s e a 4 m/s.
Temos que a
A
energia
U
total
será
dada
por
eq.
II.10,
E
=
0,040J.
Enquanto
1 2
1
kx 0,010 J e K mv 2 0,030 J .
2
2
Exemplo II. 5
Um bloco de massa M preso a uma mola de constante k descreve um MHS na
horizontal com uma amplitude A1 . No instante em o bloco passa na posição de
equilíbrio, uma massa m cai verticalmente sobre o bloco de uma pequena altura.
Calcule a nova amplitude e o período do movimento.
Solução:
Note que o movimento está dependo da posição e assim usamos o método da
energia. Antes da massa cair E = const.. Quando ela cai a colisão é totalmente
inelástica, a energia diminui, voltando a ser constante depois da colisão.
Antes da colisão: E1 0
1
1
2
Mv1 kA1 v1
2
2
k
A1 . Enquanto o
M
momentum linear é Mv1 0.
Durante a colisão existe conservação do momentum linear do sistema massa-bloco.
A colisão dura muito pouco tempo, de forma que a massa e o bloco se encontram em
30
x = 0. Note que U = 0 e que temos somente K, porém menor do que K antes da
colisão.
Depois da colisão: O momentum linear é ( M m)v 2 e pela lei de conservação de
momentum linear Mv1 ( M m)v 2 , de onde podemos obter v 2 e obtermos,
E2
1
1 M2
M
2
2
( M m)v 2
v1
E1 . Na verdade podemos dizer
2
2 M m
M m
que a energia cinética perdida é usada para elevar a temperatura do bloco. Como
E2
1
M
kA2 A2 A1
.
2
M m
O cálculo do período é T 2
mM
. Veja que a amplitude tornou-se maior e
k
o período menor.
Exemplo II. 6
Os amortecedores de um carro velho de 1000 kg estão completamente gastos.
Quando uma pessoa de 980 N sobe lentamente no centro de gravidade do carro, ele
baixa 2,8 cm. Quando essa pessoa está dentro do carro durante uma colisão com um
buraco, o carro oscila verticalmente com MHS. Modelando o carro e a pessoa como
uma única massa apoiada sobre uma única mola, calcule o período e a frequência da
oscilação.
Solução:
A constante da mola é k
F
980
3,5 10 4 . A massa da pessoa é
x
0,028
P / g 100kg . A massa total que oscila é m=1100 Kg. O período
T 2
m
1,11s . Enquanto a frequência é 0,90 Hz .
k
Exemplo II. 7
Suponha que o corpo de um pêndulo físico seja uma barra de comprimento L
suspensa em uma de suas extremidades. Calcule o período de seu movimento
oscilatório.
Solução:
O momento de inércia de uma barra em relação a um eixo passando em sua
extremidade é
I
1
ML2 . A distância entre o eixo de rotação e o centro de massa é L/2. Para este
3
pêndulo físico,
T 2
I
2L
2
MgL / 2
3g
pêndulo físico é
2
L
. Note que o período desse
2
3
g
2
do período de um pêndulo simples.
3
31
Exercícios Propostos
Exercício II. 1
Uma massa de 400 kg está se movendo ao longo do eixo x sob a influência da força
4
de uma mola com k 3,5 10 N / m . Não existem outras forças agindo na
massa. O ponto de equilíbrio é em x = 0. Suponha que em t = 0 a massa está em x =
0 e tem velocidade de 2,4 m/s na direção positiva. Qual a frequência de oscilação,
qual a amplitude e onde a massa estará em t = 0,60 s?
Resposta: 1,5 Hz; 0,26 m; -0,16 m.
Exercício II. 2
Uma massa m está pendurada vertivalmente acoplada a uma mola de constante k.
Encontre a equação de movimento, quando levamos em conta a força da gravidade.
Resposta: x A cos(t ) mg / k .
Exercício II. 3
Uma molécula de hidrogênio ( H 2 ) pode ser considerada um sistema de duas
massas ligadas por uma mola. O centro da mola, ou seja, o centro de massa do
sistema pode ser considerado fixo e assim a molécula consiste de dois osciladores
3
vibrando em direções opostas. A constante da mola é 1,13 10 N / m e a massa
de cada H é 1,67 10
1,3 10
19
27
kg . Suponha que a energia de vibração da molécula é
J . Encontre a amplitude da oscilação e a velocidade máxima.
Resposta: 1,1 10
11
m e 8,8 10 3 m / s .
Exercício II. 4
2
Qual é o comprimento do pêndulo em um lugar cuja gravidade g 9,81m / s ? O
pêndulo tem um período de exatamente 2 s , onde cada balanço leva 1 s.
Resposta: 0,994 m.
Exercício II. 5
Um pêndulo físico consiste de uma esfera uniforme de massa M e raio R suspensa
por um cabo com massa desprezível e comprimento L. Levando em conta o tamanho
da bola, qual é o período de ‘pequenas’ oscilações desse pêndulo?
Resposta:
2
g ( R L)
2 2
R ( R L)2
5
Exercício II. 6
O haltere da balança de Cavendish consiste de duas massas iguais de 0,025 kg
conectadas por uma barra com massa desprezível e de comprimento 0,40 m. Quando
o conjunto se movimenta, a balança gira para frente e para trás com um período de
3,8 minutos. Encontre o valor da constante de torção.
Resposta: 1,52 10
6
N .m / rad .
32