FEEC/Unicamp
Prof. Alim P. C. Gonçalves
Teoria de sistemas não-lineares (IA–535)
Lista 1 - 18/03/2013
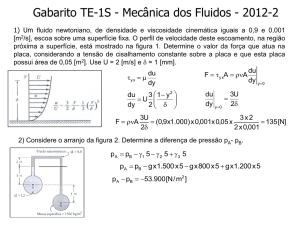
1. Para o sistema dinâmico dado na Figura 1, determine:
x
M
f
ℓ
θ
m
Figura 1: Sistema carro-pêndulo
a) O modelo matemático em termos das variáveis de estado (x, ẋ, θ, θ̇).
b) O modelo linearizado válido em torno do ponto de equilíbrio (0, 0, 0, 0).
2. Para o mesmo sistema carro-pêndulo do exercício anterior, determine:
a) A solução do modelo não-linear correspondente a f (t) = 1 para todo t ≥ 0 e
condições iniciais
x(0) = ẋ(0) = 0, θ(0) = π/4, θ̇(0) = 0
b) A solução do modelo linearizado e compare.
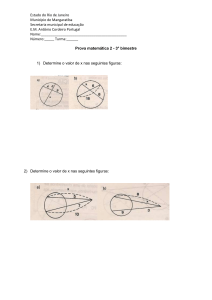
3. O circuito mostrado na Figura 2 contém um indutor não linear e está ligado a
uma fonte de corrente. Suponha que o indutor não linear seja do tipo junção de
Josephson, descrito por iL = I0 sin kφL , onde φL é o fluxo magnético do indutor e
I0 e k são constantes.
a) Usando φL e vC como variáveis de estado, encontre a equação de estado.
b) Seria mais fácil escolher iL e vC como variáveis de estado?
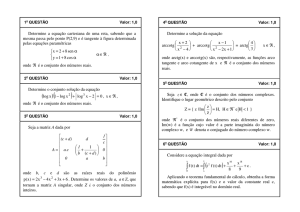
4. A Figura 3 mostra um sistema hidráulico onde um líquido é armazenado em um
tanque aberto. A área da seção transversal do tanque, A(h), é uma função de h,
Rh
a altura do líquido acima do fundo do tanque. O volume v é dado por 0 A(λ)dλ.
Para um líquido de densidade ρ, a pressão absoluta p é dada por p = ρgh + pa , onde
1
FEEC/Unicamp
Prof. Alim P. C. Gonçalves
iL
+
is (t)
R
+
vc
−
C
vL
−
Figura 2: Circuito Elétrico
pa é a pressão atmosférica (assumida constante) e g é a aceleração da gravidade.
O tanque recebe líquido a uma vazão wi e perde
líquido através de uma válvula
√
que obedece a relação vazão-pressão wo = k ∆p. Neste exemplo, ∆p = p − pa .
Considere u = wi como a entrada de controle e y = h como a saída.
wi
pa
h
k
p
wo
+∆p− pa
Figura 3: Tanque
a) Usando h como variável de estado, determine o modelo de estado.
b) Usando p − pa como variável de estado, determine o modelo de estado.
c) Encontre uss necessária para manter a saída em um valor constante r.
5. Seja a equação diferencial não-linear:
ẋ − e−x = 0, x(0) = 1
e o intervalo t ∈ [0, 10]. Determine:
a) sua solução, analiticamente.
b) sua solução, pelo método de Picard.
6. Considere a equação diferencial não-linear θ̈ + θ̇ + sin(θ) = 0 com condições iniciais
θ(0) = π/4 e θ̇(0) = 0.
a) Resolva numericamente, usando Matlab/Simulink, por exemplo.
b) Determine κ e Tmax tal que seja possível chegar à solução usando o método
de Picard e conferindo a convergencia a cada 2 iterações.
2
FEEC/Unicamp
Prof. Alim P. C. Gonçalves
c) Para T = Tmax /2, resolva pelo método de Picard.
7. Mostre que a equação de estado
2x2
,
1 + x22
2x1
ẋ2 = −x2 +
,
1 + x21
ẋ1 = −x1 +
x1 (0) = a
x2 (0) = b
tem uma solução única definida para todo t ≥ 0.
3