e x 2 = sen(ωt). Represente graficamente os respectivos")
cos ωt − π6 e x2 = sen(ωt). Represente graficamente os de amortecimento F = −ρv. Inicialmente, ele oscila com
amplitude de 25,0 cm; devido ao amortecimento, a amrespectivos vetores girantes.
plitude é reduzida para três quartos do seu valor inicial,
Solução: podemos, respectivamente, representar grafi- quando são completadas quatro oscilações.
camente o vetor girante x1 , x2 como um vetor no plano
y − z de comprimento l1 = cos ωt − π6 , l2 = sen(ωt), (a) Qual o valor de ρ?
que gira com velocidade angular ω1 = ω, ω2 = ω e que
no instante t forma um ângulo θ1 = ωt − π6 , θ2 = ωt em (b) Quanta energia foi “perdida” durante essas oscilações?
relação ao eixo y.
O movimento resultante da superposição dos movimentos harmônicos simples x(t) = x1 (t) + x2 (t) pode Solução: vimos que no regime de oscilação subcrı́tico a
γ
ρ
ser reescrito como
,
solução é do tipo x(t) = A0 e− 2 t cos(ωt+ϕ), onde γ = m
q
q
2
γ
k
π
π
ω = ω02 − 4 e ω0 = m .
cos(ωt) + sen
sen(ωt) + sen(ωt),
x(t) = cos
6
6
γ
(a) Com A(t) = A0 e− 2 t e dado que em t = 8π
ω temos
√
4πγ
4
3
3
− 4πγ
3
3
ω
A 8π
A
⇒
A
e
A
⇒
=
e ω ⇒
=
=
0
ω
4 0
4 0
3
q
x(t) =
cos(ωt) + sen(ωt).
2
2
2
4πγ
4
ω02 − γ4 temos
ω = ln 3 , e usando ω =
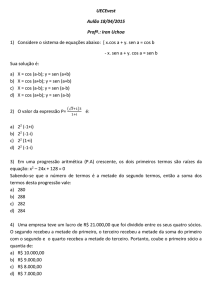
A figura abaixo exibe o movimento resultante em
!
r
função do tempo
γ2
4π
γ = ω02 −
⇒
4
4
ln 3
γ = s
ρ = s
ω0
2
4π
ln( 34 )
mω0
2
4π
ln( 43 )
=
+
⇒
1
4
⇒
+
ρ
m
ρ = 0,102 kg/s.
1
4
(b) Tendo em vista que as soluções são do tipo
11. Um pêndulo com fio de comprimento 1,00 m é abandonado do repouso de um ângulo inicial de 15◦ . Após
1000 s, sua amplitude é reduzida para 5,5◦ . Qual é o
valor da constante de amortecimento γ?
Solução: vimos que no regime de oscilação subcrı́tico a
γ
solução é do tipo x(t) = A0 e− 2 t cos(ωt + ϕ). Denotando
− γ2 t
a amplitude por A(t) = A0 e
e o comprimento por
l = 1,00 m, para pequenas oscilações a amplitude inicial
será A0 = lθ0 e a amplitude num instante t será A(t) =
γ
lθ = lθ0 e− 2 t , e onde vem que
γ
2
θ0
θ0
= e 2 t ⇒ γ = ln
θ
t
θ
Dado que em t = 0 temos θ0 = 15◦ e em t = 1000 s temos
θ = 5,5◦ , vem que
2
γ=
ln
1000 s
15◦
5,5◦
⇒
γ
x(t) = A0 e− 2 t cos(ωt),
γ v(t) = −A0 e− 2 t γ2 cos(ωt) + ω sen(ωt) ,
e que a energia total do bloco é
E(t) =
1 2 1
kx + mv 2 ,
2
2
vamos calcular a energia total em t = 0 e t =
8π
ω :
2
2
2
E(0) = 12 kA20 + 21 m γ4 A20 = A20 k + mγ
,
4
1 2 − 8πγ
2
8πγ
9
E 8π
= 2 kA0 e ω + 12 m γ4 A20 e− ω = 16
E(0),
ω
4πγ 2
2
8πγ
9
onde usamos que e− ω = e− ω
= 34 = 16
.
ρ
Portanto, usando γ = m a variação da energia será
−1
γ = 0,002 s
12. Um oscilador harmônico amortecido consiste em um
bloco (m = 2 kg), uma mola (k = 10,0 N/m) e uma força
∆E = E(0) − E
6
8π
ω
=
9
1−
16
A20
2
ρ2
k+
4m
e substituindo m = 2 kg, k = 10,0 N/m, A0 = (d) Qual é a frequência de oscilação?
25,0 cm e ρ = 0,102 kg/s temos
Solução:
∆E = 0,137 J.
(a)
r
13. Em um sistema oscilatório com uma força de atrito
temos:
ω0 =
k
=
m
s
100 N/m
0,040 kg
⇒
ω0 = 50 rad/s
dx
(b) Reescrevendo a equação de movimento
,
dt
dx
d2 x
onde k é a constante da mola e ρ é a constante de
m 2 = −ρ
− kx
amortecimento. Logo, a equação de movimento fica:
dt
dt
Fmola + Fatrito = −kx − ρ
temos
dx
d2 x
+ρ
+ kx = 0.
2
dt
dt
Considere o oscilador como estando no regime subcrı́tico
e resolva a equação diferencial para as condições iniciais
x(0) = 0 e v(0) = v0 .
M
dx
d2 x
+γ
+ ω02 x = 0,
dt2
dt
ρ
0,08 kg/s
=
= 2 s−1 e ω02 =
m
0,040 kg
(50 rad/s)2 = 2500 rad2 /s2 .
onde γ =
Solução: utilizando o ansatz x = eλt na equação de
movimento M ẍ + ρẋ + kx = 0 temos a equação caracterı́stica q
M λ2 + ρλ + kx = 0, cujas soluções são λ± =
ρ2
4M 2
ρ
− 2M
±
−
(c) Dado que ω0 = 50 s−1 e γ2 = 1 s−1 , logo ω0 >
seja, o regime de oscilação é subcrı́tico.
k
M.
γ
2,
ou
No regime de oscilação subcrı́tico
q
2
ρ
ρ
ρ2
k
k
(d) Vimos em outros exercı́cios que no regime de os<
,
logo
λ
=
−
±
iω,
onde
ω
=
±
4M 2
M
2M
M − 4M 2 .
cilação subcrı́tico a frequência de oscilação é dada
Sendo assim, as soluções serão do tipo
por:
(
ρt
x(t) = Ae− 2M sen(ωt + ϕ),
ρt v(t) = Ae− 2M ω cos(ωt + ϕ) −
r
ρ
2M
ω=
sen(ωt + ϕ) .
ω02 −
√
√
γ2
= 2500 − 1 rad/s = 2499 rad/s
4
Impondo as condições iniciais
(
temos ϕ = 0 e A =
(
e com isso
15. (Poli 2006) Um corpo de massa m = 1,0 kg oscila
livremente, quando preso a uma mola, com frequência
angular ω0 = 2,0 rad/s. Posteriormente este conjunto
é colocado num
√ lı́quido, cujo coeficiente de resistência
viscosa é ρ = 2 3 kg/s.
sen(ωt),
ω cos(ωt) −
(a) Escreva a equação diferencial do movimento harmônico amortecido, e a sua solução com as condições
iniciais x(0) = 0,50 m e v(0) = 0.
x(0) = A sen(ϕ) = 0,
v(0) = A ω cos(ϕ) −
v0
ω
x(t) =
ρt
v0 − 2M
ωe
v(t) =
ρt
v0 − 2M
ωe
ρ
2M
sen(ϕ) = v0 ,
ρ
2M
sen(ωt) .
(b) Determine o tempo necessário T para que a amplitude do movimento diminua de um fator 1/e em re14. (Poli 2007) Um corpo de massa m = 40 g está preso
lação ao valor inicial.
a uma mola de constante elástica k = 100 N/m. Este
sistema é colocado para oscilar e depois imerso num meio
Solução:
cujo coeficiente de atrito viscoso é ρ = 0,08 kg/s.
(a) A equação de movimento será:
(a) Determine a frequência natural do sistema.
(b) Escreva a equação diferencial que descreve o movimento, explicitando os valores numéricos dos coeficientes (indicando suas unidades).
m
d2 x
dx
+ρ
+ kx = 0
dt2
dt
√
e substituindo os dados m = 1,0 kg, ρ = 2 3 kg/s e
k = mω02 = 4 N/m temos
(c) Qual é o regime de oscilação? (justifique)
7
√ dx
d2 x
+2 3
+ 4x = 0.
2
dt
dt
(x − x0 )00 + γ(x − x0 )0 + ωo2 (x − x0 ) = 0.
Dado que o regime de oscilação é subcrı́tico, a solução
será do tipo
Utilizando o ansatz x = eλt na equação de
movimen√
2
3λ
+
4
=
0,
to temos a equação caracterı́stica
λ
+
2
√
γ
√
x(t) = x0 + A0 e− 2 t cos(ωt + ϕ),
cujas
√ soluções são λ± = (−2 3 ± 12 − 16)/2 =
q
− 3 ± i. Logo, a solução é do tipo
2
onde ω =
ω02 − γ4 . Denotando a amplitude de osγ
(
cilação por A(t) = A0 e− 2 t e dado que em t = 2π
ω
πγ
πγ
temos A 2π
= 21 A0 ⇒ A0 e− ω = 12 A0 ⇒ 2 = e ω
ω
q
2
⇒ πγ
ω02 − γ4 temos
ω = ln(2), e usando ω =
r
γ2
π
γ = ω02 −
⇒
ln(2)
4
√
x(t) = Ae− 3t
cos(t + ϕ),
√ √
− 3t
v(t) = −Ae
3 cos(t + ϕ) + sen(t + ϕ) ,
Impondo as condições iniciais
x(0) = A cos(ϕ)
√ = 0,5,
v(0) = −A 3 cos(ϕ) + sen(ϕ) = 0,
γ = r
√
vem que tan(ϕ) = − 3 ⇒ ϕ = − π3 e com isso
A cos π3 = 12 ⇒ A = 1. Portanto,
(
ρ = r
√
cos t − π3 ,
x(t) = e− 3t
√ √
v(t) = −e− 3t 3 cos t − π3 + sen t − π3 .
A(T ) = e
√
−1
⇒
=e
T =
π
ln(2)
π
ln(2)
=
+
⇒
+
1
4
ρ
m
⇒
ρ = 1,1 × 103 kg/s.
1
4
17. Um oscilador criticamente amortecido, partindo da
posição de equilı́brio, recebe um impulso que lhe comunica uma velocidade inicial v0 . Verifica-se que ele passa
por seu deslocamento máximo, igual a 3,68 m, após 1
segundo.
√
(b) No instante t a amplitude é dada por A(t) = e− 3t ,
em t = 0 temos A(0) = 1. Logo, o instante T em que
a amplitude é reduzida por um fator 1/e será dado
por
√
− 3T
mω0
2
ω0
2
(a) Qual é o valor de v0 ?
3
s.
3
(b) Se o oscilador tivesse um deslocamento inicial x0 =
2 m com a mesma velocidade inicial v0 , qual seria o
valor de x no instante t?
16. Considere uma situação em que você está examinando as caracterı́sticas do sistema de suspensão de um
automóvel. A suspensão “cede” 10 cm, quando o peso do Solução: a equação de movimento será do tipo
automóvel inteiro é colocado sobre ela. Além disso, a amẍ + γ ẋ + ω02 x = 0.
plitude da oscilação diminui 50 % durante uma oscilação
completa. Estime os valores de k e ρ para o sistema com o ansatz x = eλt temos a equação caracterı́stica λ2 +
q
2
de mola e amortecedor em uma roda, considerando que
γλ+ω02 = 0, cujas soluções são λ± = − γ2 ± γ4 − ω02 . No
cada uma suporta 500 kg.
regime criticamente amortecido tem-se que ω0 = γ2 e com
Solução: para cada suspensão a equação de movimento isso as raı́zes da equação caracterı́sticas são iguais λ+ =
λ− = − γ2 , resultando em apenas uma solução. Logo,
será
precisamos buscar uma segunda solução. Tentando uma
solução do tipo x = teλt vem que ẋ = (1 + λt)eλt , ẍ =
mẍ + ρẋ + kx + mg = 0,
(2λ + λ2 t)eλt e isso na equação de movimento fornece a
No ponto de equilı́brio x0 = −0,10 m a equação de moviequação caracterı́stica
mento fica kx0 + mg = 0, logo a constante elástica será
(2λ + λ2 t)eλt + (1 + λt)γeλt + ω02 teλt = 0,
k=−
mg
500 × 10
N/m
=−
x0
−0,10
⇒
k = 5,0 × 104 N/m.
(λ2 + γλ + ω02 )t + (2λ + γ) = 0.
ρ
k
Com γ = m
, ω02 = m
e x0 = − mg
Uma vez que ω0 = γ2 , facilmente obtemos que a
k podemos reescrever
a equação de movimento na forma
solução da equação caracterı́stica é λ = − γ2 . Portanto,
8
γ
γ
x2 (t) = te− 2 t é solução juntamente com x1 (t) = e− 2 t , e
a combinação linear das duas soluções resulta na solução
geral x(t) = ax1 (t) + bx2 (t):
γ
x(t) = (a + bt)e− 2 t ,
e a velocidade será
h
i γ
γ
v(t) = b − (a + bt) e− 2 t .
2
Tomando a posição inicial x(0) = 0 e dado que a velocidade inicial é v(0) = v0 tem-se que a = 0, b = v0
e
γ
x(t) = v0 te− 2 t , (d) Determine o valor da velocidade inicial do oscilador.
γ
v(t) = v0 1 − γ2 t e− 2 t ,
(a) No regime criticamente amortecido a posição é máx- Solução:
ima quando v(t) = 0 ⇒ 1 − γ2 t = 0 ⇒ γ = 2t . Dado
(a) A velocidade será nula em aproximadamente t = 3 s.
que o deslocamento máximo ocorre em t = 1 s temos
−1
−1
γ = 2 s . Nesse instante temos x(1) = v0 (1 s)e = (b) Em t = 0 temos x(0) = a = 0,5 m. Já em t = 1 s o
γ
3,68 m ⇒ v0 = 3,68e m/s de onde obtemos a velocigráfico mostra que x(1) = e− 2 (a + b) = 0 ⇒ b = −a
dade inicial v0 = 10,0 m/s e
⇒ b = −0,5 m.
(c) Com isso, e impondo que a velocidade v(t) =
γ
b − γ2 (a + bt) e− 2 t seja nula em t = 3 s vem que
1 γ 1 3 − 3γ
v(3) = − 2 − 2 2 − 2 e 2 = 0 ⇒ γ = 1 s−1 . E
assim podemos calcular o coeficiente de resistência
viscosa ρ = mγ ⇒ ρ = 1 kg/s.
x(t) = 10 t e−t ,
v(t) = 10 (1 − t) e−t ,
(b) Com γ = 2 s−1 as soluções gerais ficam
x(t) = (a + bt)e−t ,
v(t) = [b − (a + bt)]e−t ,
Uma vez que o amortecimento é crı́tico, temos ω0 =
γ
−1
. E com k = mω02 obtemos a constante
2 = 0,5 s
elástica k = 0,25 N/m.
e impondo as condições iniciais x(0) = a = 2 m e
−1
v(0) = b−a = 10 m/s temos que a = 2 m, b = 12 m/s (d) Agora, usando que a = 0,5 m, b = −0,5 m e γ = 1 s
as soluções
e
(
x(t) = (2 + 12t)e−t ,
v(t) = (10 − 12t)e−t .
γ
x(t) = (a + bt)e− 2 t ,
γ
v(t) = b − γ2 (a + bt) e− 2 t ,
ficam
18. (Poli 2006) O gráfico de x(t), mostrado na figura
abaixo, representa a equação horária de um oscilador
criticamente amortecido, para um sistema composto de
um corpo de massa m = 1,0 kg preso a uma mola de
constante elástica k e imerso em um lı́quido viscoso, de
coeficiente de resistência viscosa ρ.
1
t
x(t) = (1 − t)e− 2 ,
2
v(t) = 1 (t − 3)e− 2t ,
4
Portanto, a velocidade inicial do oscilador v(0) = v0
será v0 = −0,75 m/s.
(a) Em que instante de tempo a velocidade do corpo será
nula, no intervalo de tempo mostrado no gráfico?
19. Um corpo de massa m = 1000 kg cai de uma altura
H = 1 m sobre uma plataforma de massa desprezı́vel.
Deseja-se projetar um sistema constituı́do por uma mola
− γ2 t
(a + bt)
x(t) = e
e um amortecedor sobre o qual se montará a plataforma
de modo que ela fique em equilı́brio a uma distância d =
Determine os valores de a e b da equação.
2 m abaixo de sua posição inicial, após o impacto. O
(c) Determine o coeficiente de resistência viscosa ρ e a equilı́brio deve ser atingido tão rápido quanto possı́vel,
constante elástica k da mola.
sem oscilações.
(b) A equação horária x(t) pode ser escrita como
9
Sabemos que a solução da equação homogênea é do
(a) Obtenha a constante k da mola e a constante de
tipo xh (t) = a sen(ω0 t) + b cos(ω0 t). Tentando uma
amortecimento ρ do amortecedor.
solução particular do tipo xp (t) = A sen(ωt) temos
(b) Obtenha a equação que descreve o movimento do
bloco após entrar em contato com a plataforma.
F0
−ω 2 A sen(ωt) + ω02 sen(ωt) =
sen(ωt) ⇒
m
Solução: a equação de movimento será
mẍ + ρẋ + kx + mg = 0,
A=
ρ
k
e ω02 = m
podemos reescrevê-la na forma
e com γ = m
2
ẍ + γ ẋ + ω0 x + g = 0, ou ainda com y = x + ωg2 ela pode
F0
.
− ω2 )
m(ω02
Logo, a solução geral é x(t) = xh (t) + xp (t):
0
ser reescrita na forma ÿ + γ ẏ + ω02 y = 0, cuja solução foi
obtida anteriormente.
Para que o equilı́brio seja atingido tão rápido quanto o
possı́vel o amortecimento de ser crı́tico, ou seja, devemos
impor que ω0 = γ2 .
(
x(t) = a sen(ω0 t) + b cos(ω0 t) + A sen(ωt),
v(t) = aω0 cos(ω0 t) − bω0 sen(ω0 t) + Aω cos(ωt),
(a) Para que o equilı́brio ocorra em −d a constante elás- e impondo as condições iniciais
tica deve ser tal que −kd + mg = 0 ⇒ k = mg
(
d ⇒
x(0) = b = 0,
k = 5 × 103 N/m.
q
v(0) = aω0 + Aω = 0,
ρ
k
Reescrevendo a relação ω0 = γ2 temos m
= 2m
⇒
√
√
ρ
chega-se em b = 0, a = − ωω0 A e
ρ = 2 mk ⇒ ρ = 2 5 × 103 kg/s. Logo, γ = m
√ −1
implica que γ = 2 5 s .
i
h
F0
(b) Com x(t) = y(t)− ωg2 e v(t) = ẋ(t) = ẏ(t) as soluções
ω
x(t) =
sen(ω
t)
,
sen(ωt)
−
0
0
ω0
m(ω02 − ω 2 )
para o amortecimento crı́tico serão do tipo
(
v(t) =
γ
x(t) = (a + bt)e− 2 t − ωg2 ,
0
−γt
γ
v(t) = b − 2 (a + bt) e 2 .
ωF0
[cos(ωt) − cos(ω0 t)] .
m(ω02 − ω 2 )
A velocidade inicial v0 vem√da conservação da
√ ener- 21.
11 (Poli 2006) Um corpo de massa m desliza sobre um
gia 21 mv02 = mgH ⇒ v0 = 2gH ⇒ v0 = 2 5 m/s.
plano horizontal sem atrito sujeito a três forças: uma
A posição inicial é x(0) = x0 = 0. Impondo as
força elástica resultante da ação de uma mola de conscondições iniciais
tante elástica k, uma força devido à resistência viscosa do
(
meio, caracterizada pela constante de resistência viscosa
x(0) = a − ωg2 = 0,
ρ e uma força externa periódica F (t) = F0 cos(Ωt), sendo
0
γ
Ω a frequência externa.
v(t) = b − 2 a = v0 ,
vem que a =
g
ω02
=
mg
k
= d = 2 m e b = v0 . Com (a) Escreva a equação diferencial que descreve o movi√ −1
mento do corpo e encontre a sua solução estaisso, e usando que γ = 2 5 s tem-se as soluções
cionária.
√
√
(
x(t) = 2(1 + 5 t)e− 5 t − 2,
(b) Considerando que m = 50 kg, k = 5000 N/m, F0 =
√
− 5t
50 N e ρ = 500 kg/s, calcule a frequência natural do
v(t) = −10 t e
.
sistema e o seu fator de qualidade.
(c)
10 Um oscilador não amortecido de massa m e frequên20.
cia própria ω0 move-se sob a ação de uma força externa
F = F0 sen(ωt), partindo da posição de equilı́brio com
velocidade inicial nula. Ache o deslocamento x(t).
(d)
Solução: a equação de movimento será
ẍ + ω02 x =
F0
sen(ωt).
m
No regime estacionário, usando os valores do item
anterior, determine o valor de Ω para o qual a amplitude do movimento é máxima.
No regime estacionário, usando os valores do item
(b), determine o valor da amplitude máxima.
Solução:
10
(a) A segunda lei de Newton aplicada ao corpo fica
mẍ = −kx − ρẋ + F0 cos(Ωt),
(ω02 − Ω2 )
F0
A sen(Φ)
− γΩ =
tan(Φ)
m
ρ
k
e com γ =
e ω02 = m
podemos reescrever essa
m
equação de movimento na forma
(ω02 − Ω2 )2
F0
A sen(Φ) −
− γΩ =
γΩ
m
⇒
F0
sen(Φ) 2
(ω0 − Ω2 )2 + γ 2 Ω2 =
γΩ
m
⇒
dx
d2 x
F0
+γ
+ ω02 x =
cos(Ωt).
dt2
dt
m
−A
A solução da equação homogênea tem um fator
γ
multiplicativo e− 2 t , independente do regime de oscilação, e pode ser considerado como um efeito transiente. A solução estacionária será uma solução particular da equação não homogênea. De um modo
geral vamos procurar por uma solução particular do
tipo x(t) = A cos(Ωt + Φ), e substituindo isso na
equação de movimento obtém-se a equação
⇒
que junto com o resultado
sen(Φ)
± tan(Φ)
1
p
=
=
γΩ
γΩ
1 + tan2 (Φ)
±1
±1
(ω02 −Ω2 )
p
=p 2
2
2
2
2
2
2
2
(ω0 −Ω ) (ω0 −Ω ) +γ Ω
(ω0 −Ω2 )2 +γ 2 Ω2
−Ω2 A cos(Ωt + Φ) − γΩA sen(Ωt + Φ)+
ω02 A cos(Ωt + Φ) =
fornece que
F0
cos(Ωt),
m
2
F0
±1
Ap 2
(ω0 − Ω2 )2 + γ 2 Ω2 =
⇒
2
2
m
(ω0 − Ω ) + γΩ
que pode ser reescrita como
F0
cos(Ωt)−
(ω02 − Ω2 )A cos(Φ) − γΩA sen(Φ) −
m
A(Ω) = ±
[(ω02 − Ω2 )A sen(Φ) + γΩA cos(Φ)] sen(Ωt) = 0,
F0
1
p
m (ω02 − Ω2 )2 + γ 2 Ω2
Portanto, a solução estacionária é
igualando os coeficiente que não dependem do tempo
a zero é direto que
x(t) = A(Ω) cos[Ωt + Φ(Ω)],
A (ω02 − Ω2 ) cos(Φ) − γΩ sen(Φ) = F0 ,
m
A (ω 2 − Ω2 ) sen(Φ) + γΩ cos(Φ) = 0,
com
A(Ω) =
0
Dessa segunda igualdade obtemos a fase Φ em função
de Ω:
γΩ
tan(Φ) = − 2
ω0 − Ω2
Φ(Ω) = − arctan
1
F0
p
,
2
m (ω0 − Ω2 )2 + γ 2 Ω2
e
Φ(Ω) = − arctan
⇒
γΩ
ω02 − Ω2
γΩ
2
ω0 − Ω2
.
(b) A frequência angular natural é
Utilizando esse resultado e a identidade trigonométrica sen2 (Φ) + cos2 (Φ) = 1 temos
r
ω0 =
k
=
m
s
5000 N/m
50 kg
⇒
ω0 = 10 s−1 .
±1
± tan(Φ)
cos(φ) = p
e sen(Φ) = p
,
2
1 + tan (Φ)
1 + tan2 (Φ)
O fator de qualidade será dado por Q =
e usando esses resultados na primeira igualdade vamos obter amplitude A em função de Ω:
Com γ =
ω0 = γ e portanto Q = 1.
11
que A(ω0 )
= Fm0 γω1 0 e A(0)
500 kg/s
ρ
⇒
m =
50 kg
=
F0 1
m ω02
A(ω0 )
A(0) .
Dado
temos Q =
ω0
γ .
γ = 10 s−1 tem-se que
(c) Derivando A(Ω) em relação a Ω temos
(d) Qual deveria ser o valor exato da frequência externa
de excitação para que a amplitude de oscilação, no
regime estacionário, fosse máxima?
F0 −4Ω(ω02 − Ω2 ) + 2γ 2 Ω
=0
A (Ω) =
m [(ω 2 − Ω2 )2 + γ 2 Ω2 ]3/2
0
0
⇔
Solução:
r
Ω=0
ou
2(ω02 −Ω2 )
=γ
2
⇒
Ω=
ω02
−
(a) A frequência natural do sistema será ω0 =
γ2
ω0 = 20 s
2
−1
q
k
m
⇒
.
ρ
(b) Usando γ = m
vem que γ = 18 s−1 . Logo, ω0 > γ2 e
O valor de Ω em que a amplitude A(Ω) é máxima é
o regime de oscilação é subcrı́tico.
a frequência de ressonância
(c) Vimos que a amplitude de oscilação é dada por A =
r
F0 √
1
. Dado que ω0 = Ω = 20 s−1 e
2
√
m
γ
(ω02 −Ω2 )2 +γ 2 Ω2
−1
2
ΩR = ω0 −
⇒ ΩR = 5 2 s .
γ = 18 s−1 a amplitude de movimento será
2
De fato, note que para Ω > ΩR temos A0 (Ω) < 0, e
para Ω < ΩR temos A0 (Ω) > 0, ou seja, a amplitude
é máxima em ΩR .
A=
F0 1
m γΩ
⇒
A = 0,5 m.
(d) Também vimos que a amplitude é máxima na fre(d) Agora, vamos calcular o valor máximo
q da amplitude.
quência
de ressonância ΩR : A0 (Ω) = 0 ⇒ Ω = ΩR =
2
q
Primeiro, note que usando ΩR = ω02 − γ2 temos
√
2
ω02 − γ2 ⇒ ΩR = 238 s−1 .
γ4
γ4
2 2
2
2 2
2 2
(ω0 − ΩR ) = 4 e γ ΩR = γ ω0 − 2 . Assim,
F0 /m
F0 /m
A(ΩR ) = p 2
=q
2
2
2
2
4
γ
(ω0 − ΩR ) + γ ΩR
2 2
4 + γ ω0 −
, 23. Duas partı́culas de mesma massa m = 250 g, estão
penduradas no teto por barras idênticas, de comprimento
l = 0,4 m e massa desprezı́vel, e estão ligadas uma à
outra por uma mola de constante elástica k = 25 N/m.
No instante t = 0, a partı́cula 2 (figura abaixo) recebe um
impulso que lhe transmite uma velocidade v = 15 cm/s.
Determine os deslocamentos x1 (t) e x2 (t) das posições
de equilı́brio das duas partı́culas (em cm) para t > 0.
γ4
2
e
Amax = A(ΩR ) =
Amax =
1
F0
q
γm
ω02 −
γ2
4
⇒
1
√ m.
50 3
22. (Poli 2007) Um corpo de massa 50 g está preso
12
a uma mola de constante k = 20 N/m e oscila, inicialmente, livremente. Esse oscilador é posteriormente
colocado num meio cujo coeficiente de atrito viscoso é
ρ = 0,9 kg/s. Depois disso o oscilador, ainda no meio viscoso, é excitado por uma força externa F = F0 cos(Ωt),
onde F0 = 9,0 N e Ω = 20,0 rad/ s.
Solução: sabemos que para um pêndulo simples a equação de movimento pode ser obtida pela segunda lei
de Newton na forma angular τ = Iα. Tomando o
eixo perpendicular ao plano de oscilação e que passa
pelo ponto onde o pêndulo está pendurado temos a
(a) Determine a frequência natural do sistema.
equação [−mg sen(θ)]l = (ml2 )θ̈ ⇒ −g sen(θ) = lθ̈. Con(b) Qual o regime de oscilação do sistema quando imerso siderando o eixo x na horizontal e com origem no ponto
x
no meio viscoso, mas antes de ser excitado pela força de equilı́brio, para pequenas oscilações, temos sen(θ) =g l
e ẍ = lθ̈ e a equação de movimento fica ẍ = − l x.
externa? Justifique a resposta.
Tomando um referencial para cada partı́cula, com origem
(c) Depois que a força externa é aplicada e que o sis- no seu ponto de equilı́brio, as equações de movimento
tema entrou no regime estacionário, qual o valor da para cada partı́cula, adicionando a força devido a mola,
serão
amplitude do movimento?
12
 e x 2 = sen(ωt). Represente graficamente os respectivos")