Notas de aula – Capítulo 1 – Física II – Oscilações Simples – Prof. Dr. Cláudio S. Sartori
Introdução
Existem situações na vida prática em que
ocorrem problemas que envolvem uma situação em
que a posição de um corpo é de equilíbrio; uma vez
deslocado dessa posição, ele sofre a atuação de uma
força restauradora, que o obriga a uma posição de vai
e vem em torno da posição de equilíbrio.
Exemplos dessas situações são:
O pêndulo: uma massa suspensa por uma
corda. Na posição de equilíbrio, a massa fica na
posição vertical do ponto de suspensão e quando
deslocada desta posição, ela retorna a ela oscilando de
um lado para outro de forma regular e repetitiva.
Uma massa conectada a uma mola.
Nesse caso, a massa, presa à mola, uma vez deslocada
da posição de equilíbrio (quando a mola está relaxada)
ela retorna a essa posição num movimento repetitivo.
Os pistões de um motor a gasolina.
As cordas de um instrumento musical.
O movimento das moléculas de um
sólido. Movimentam-se em torno de sua posição de
equilíbrio na rede cristalina do sólido.
As vibrações das moléculas de água
causadas pelas microondas num forno de microondas,
rompendo as ligações de hidrogênio nas moléculas,
causando o aquecimento da substância.
A batida do coração humano.
Circuitos elétricos: Num circuito elétrico
no qual há uma corrente elétrica alternada, podemos
descrevê-lo em termos de voltagens, correntes e
cargas elétricas que oscilam com o tempo.
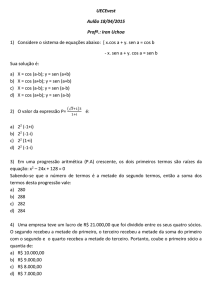
Figura 1 – Exemplos de sistemas oscilantes
e vibratórios.
(a) Pêndulo de um relógio.
(b) Movimento dos pistões num motor de
automóvel.
(d) Funcionamento de um amortecedor e
mola da suspensão de um carro.
1
(e) Movimento de átomos e de moléculas
numa rede cristalina de uma substância.
(f) Sistemas oscilantes e massa-mola.
(c) Movimento da suspensão de um carro.
Assim, os estudos de movimentos
vibratórios e oscilantes servem de base para muitos
campos da Física.
Quando há a inclusão de forças dissipativas
nesse estudo, chamaremos de força de amortecimento,
importante para descrever o funcionamento da
suspensão de um automóvel.
Também quando há a necessidade de se
acoplar uma força periódica externa ao sistema, para
mantê-lo forçado, onde situações da chamada
ressonância aparecerão, de importante aplicação em
diferentes setores da física.
Notas de aula – Capítulo 1 – Física II – Oscilações Simples – Prof. Dr. Cláudio S. Sartori
Oscilações livres: O movimento Harmônico
simples - MHS
Quando submetemos um corpo a forças de tração,
compressão ou torção, ele sofre deformação.
Cessando a aplicação, o corpo pode ou não
retornar à sua forma original, retomando as suas
dimensões ou formas iniciais ou permanecer
deformado.
A propriedade que determina como um corpo
retorna às suas condições iniciais depois da aplicação
da força é denominada de elasticidade.
Tracionando-se ou comprimindo-se certa mola
helicoidal, esta irá se deformar em relação à seu
comprimento inicial L0, de uma deformação x e
apresentando-se um comprimento final L.
L L0 x (t )
Figura 1 - Variação do comprimento de uma
mola em função da deformação x(t).
A intensidade da força aplicada na mola é
proporcional à deformação observada x(t), dentro de
um certo limite elástico. Essa propriedade é traduzida
pela equação:
F
k x
Conhecida como Lei de Hooke.
A constante de proporcionalidade k é
chamada de constante elástica da mola e sua unidade
no sistema internacional é o N/m (Newton por metro).
O gráfico de F versus x é uma reta que passa
pela origem, com inclinação k.
No caso de um bloco de massa m suspenso
por uma mola, quando em equilíbrio, a força peso P é
igual à força elástica –kx, a uma deformação que
chamaremos de :
P k
Se houver uma pequena deformação xp da
mola em torno dessa posição de equilíbrio:
L L0
A nova deformação da mola oscilará entre um
máximo e um mínimo desse valor:
x t
L L0
Ou seja,
x t
xp
xp
A segunda lei de Newton ficará:
d 2x
m
k x P k
dt 2
d 2x
m
k x
dt 2
d 2x k
x 0
dt 2 m
2
Situação similar ocorrerá quando tivermos
um bloco conectado à mola na posição horizontal,
desprezando o atrito entre o solo e o bloco.
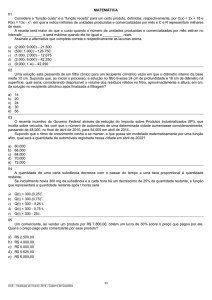
Observa-se que, uma vez abandonado o
bloco de massa m a partir de uma amplitude xm, a
aceleração será máxima para a esquerda, a velocidade
nula. Quando passar pela posição de equilíbrio,
situada em x = 0, sua velocidade será máxima para a
esquerda e aceleração nula. Ao chegar em –xm, o
bloco comprimiu o máximo a mola, possuirá
velocidade 0 e aceleração máxima para a direita. Ao
passar novamente na posição de equilíbrio em x = 0,
sua velocidade será máxima para a direita e sua
aceleração nula. Assim o movimento se repete num
período T, com uma freqüência f e se relacionando
por:
1
T
f
Notas de aula – Capítulo 1 – Física II – Oscilações Simples – Prof. Dr. Cláudio S. Sartori
Figura 2 – Variação da posição, velocidade
e aceleração num MHS.
3
Período: Intervalo de tempo de uma
oscilação ou um ciclo.
Unidade: Segundo (s).
Freqüência: Número de oscilações por
unidade de tempo: f n
t
Unidade: Hertz: 1 Hz= 1/s
Rotações por minuto: 1rpm =(1/60)Hz
A dimensão de k é de 1/s2 e esse termo
m
aparece na equação de movimento do MHS:
d 2x k
x 0
dt 2 m
Para resolvermos essa equação, utilizamos a
teoria das equações diferenciais. Assim, podemos ter
como solução:
x t
xm cos
Observamos que para x(t) ser solução da equação
diferencial que representa o movimento do MHS,
deve satisfazê-la.
Assim, precisamos encontrar as derivadas
primeira e segunda de x(t). Escolhendo:
x t
d
x t
dt
d2
x t
dt 2
xm sen
sen
2
xm
t
cos
t
ou
d
x t
dt 2
Ou
x t
xm
t
2
t
t
Aqui:
Fase: , : Constante que depende das
condições iniciais do problema.
Unidade: Radiano: rad.
Freqüência angular
: Constante que
dependerá da constante elástica da mola e da massa do
oscilador.
xm cos
v t
x t
Assim:
d 2x k
k
2
x 0
x
x 0
dt 2 m
m
2
k
2
f
m
T
Observe que:
Posição do oscilador:
x t
2
xm cos
t
Unidade: metro (m).
xm: máxima amplitude.
Velocidade instantânea:
dx
dt
v t
xm
sen
t
Velocidade máxima:
vm
xm
Unidade: metro por segundo: (m/s).
aceleração instantânea:
Notas de aula – Capítulo 1 – Física II – Oscilações Simples – Prof. Dr. Cláudio S. Sartori
a(t )
dv
dt
d 2x
dt 2
a(t )
2
xm
Resolvendo o sistema, acharemos:
cos
t
xm
Aceleração máxima:
2
am
xm
am
2
v0
2
0
x
vm
(Amplitude máxima)
Unidade: metro por segundo ao
quadrado: (m/s2).
v0
x0
arctg
(Constante de fase)
Se aplicarmos as condições iniciais na
equação:
x t
xm sen
4
t
Teremos:
v t
a t
dx
dt
2
d x
dt 2
v t
xm
a t
cos
2
xm
xm sen
t
sen
x0
xm cos
v0
Resolvendo o sistema, acharemos:
xm
2
0
x
v0
2
(Amplitude máxima)
arctg
x0
v0
(Constante de fase)
Condições iniciais:
As condições iniciais do problema de oscilação
são fundamentais para se conhecer a solução do
problema. São dadas por:
Posição inicial:
x t 0
x0
Velocidade inicial:
v t
0
v0
Assim, se aplicarmos as condições iniciais na
equação:
x t
xm cos
t
Teremos:
xm cos
xm sen
x0
v0
Gráficos (t, x(t)); (t, v(t)) e (t, a(t))
t
Notas de aula – Capítulo 1 – Física II – Oscilações Simples – Prof. Dr. Cláudio S. Sartori
Oscilador Harmônico
circular uniforme:
e
Movimento
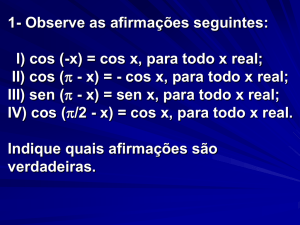
Figura 3 – Relação entre movimento circular
uniforme e MHS.
Podemos associar o Movimento Harmônico
Simples ao movimento de uma partícula de massa m
sobre uma circunferência com velocidade constante
(em módulo). Observe que a projeção da posição x da
partícula sobre o eixo x é a posição x(t) do MHS e:
t
x t
xm cos
y t
xm sen
5
Notas de aula – Capítulo 1 – Física II – Oscilações Simples – Prof. Dr. Cláudio S. Sartori
Figura 4 – Relação entre as energias no MHS,
energias em função do tempo e da posição.
A Energia no Movimento Harmônico
Simples
Conforme ocorre o movimento Harmônico
Simples, há uma transformação constante da energia
potencial elástica da mola (U) em energia cinética da
massa (K). Lembrando que:
U
k x2
2
K
m v2
2
6
A energia mecânica (E) é dada por:
k x2 m v2
2
2
Se substituirmos: x t
xm cos
E U K
ev t
E
xm
E
sen
k xm cos
t
t
2
t
m
xm
sen
2
2
k
m
Teremos:
Lembrando que:
E
k xm 2
ou E
2
m
k
m
2
xm 2
2
2
t
2
Notas de aula – Capítulo 1 – Física II – Oscilações Simples – Prof. Dr. Cláudio S. Sartori
Ts
2
Períodos
k1 k2 mA
; Tp
k1k2
2
mA
k1 k2
Pêndulo simples
Associação de molas
Pode-se encontrar as molas associadas da
seguinte maneira:
Série (a).
Paralelo (b).
Pêndulo simples é um instrumento ou uma
montagem que consiste em um objeto oscilando em
torno de um ponto fixo. O braço executa movimentos
alternados em torno da posição central, chamada
posição de equilíbrio. É muito utilizado em estudos da
força peso e do movimento oscilatório.
A descoberta da periodicidade do movimento
pendular foi feita por Galileu Galilei. O movimento de
um pêndulo simples envolve basicamente uma
grandeza chamada período (simbolizada por T): é o
intervalo de tempo que o objeto leva para percorrer
toda a trajetória (ou seja, retornar a sua posição
original de lançamento, uma vez que o movimento
pendular é periódico).
Figura 5 – Parâmetros necessários para medir a
gravidade g utilizando um pêndulo simples de massa
m:
ângulo inicial de lançamento, (t): ângulo num
instante t; l: comprimento do pêndulo.
Figura 5 – Associação de molas em série (a)
e paralelo (b).
(a)
(b)
l
(t)
Pcos
h
s
Psen
x1
x x1 x2
F
k
1
ks
F
k1
1
k1
F
k2
1
1
k2
kn
x2
k k1 k2
kp
k1 k2 kn
7
Notas de aula – Capítulo 1 – Física II – Oscilações Simples – Prof. Dr. Cláudio S. Sartori
F
ma
Psen
m
2
m
d l
mgsen
dt 2
d 2s
mgsen
dt 2
d2
l 2
gsen
dt
d2
g
sen
2
dt
l
d2
g
sen
0
2
dt
l
3
sen
0,1
3!
sen
g
l
t
0
d2
dt 2
cos
2
1 2
mv
2
Ep
(para os pontos
Como:
h l cos
l cos
0
e
= 0°)
ds
dt
v
e
0
=
mgh
d (l )
dt
d
dt
l
8
Substituindo, teremos:
g
l
0
2
1
d
m l
2
dt
1 2 d
ml
2
dt
0
d
dt
l
g
cos
mgl cos
cos
g
cos
l
2
g
cos
l
2
(t )
mgl cos
2
0
2
2
d
dt
g
l
2
Ec
t
2
T
T
Discussão - Pêndulo simples: Caso de qualquer
ângulo inicial
Analisando com a conservação da energia
mecânica:
Em
5
5!
d2
dt 2
Apêndice
cos
cos
g
cos
l
0
0
{1}
0
cos
0
d
Se invertermos a relação {1}, teremos:
dt
d
1
2
1
2
t
l
g
l
g
1
cos
cos
1
cos
0
d
cos
0
O período será dado, portanto, por:
4
2
T
l
g
0
T
4
t
1
cos
0
d
cos
0
Como
cos
T
4
2
l
g
1 cos2
2
2
cos
1
0
2 sen2
2
1
2
0
0
sen2
2
1
0
2
1
1
1
2
sen
2
2
1
2
d
1
1
2
sen
2
0
2
sen2
2
Notas de aula – Capítulo 1 – Física II – Oscilações Simples – Prof. Dr. Cláudio S. Sartori
4
2
T
T
l
4
g
l
g
0
1
1
sen 2
2
0
0
0
1
sen 2
sen 2
0
2
2
d
sen 2
0
2
1
2
d
sen 20 cos d
0
0
2
2
T
2
13
sen4
24
0
2
l
K k
g
4
T
T
T
T
T
4
4
sen 2
l
g
l
g
l
g
l
4
g
4
k
1
2
4
K (k )
sen 2
0
2
0
2
K sen
sen 2
cos d
cos 2
0
sen 2
l
g
0
2
0
2
0
9
2
9k 2
64
25k 3
256
0
2
2
1
1
sen2
2
1225k 4
16384
2
0
2
13
sen4
24
0
0
0
0
0
sen 2
cos d
cos 2
1
sen
1 sen2
0
2
sen 20
cos d
cos 2
1
0
sen 2 cos
1
d
cos 2
0
1
d
1 sen2
0
0
2
d
1 sen 2
0
2
0
2
sen 2
d
1 sen2
0
2
K k
0
0
2
sen2
d
1 k 2 sen2
2
sen2
0
2
0
2
d
1 sen2
0
2
sen2
135
sen6
246
0
2
d
F( , )
1 sen 2 sen 2
0
Como:
K k
2
A expansão em série para a integral elíptica de
primeira espécie K(z) fica:
2
1
l
4
g
4
k6
135
sen6
246
0
sen2
0
T
2
13 5
2 4 6
k4
2
0
0
2
Abramowitz & Stegun – Handbook of
Mathematical functions – 9a Ed..17, pg. 589.
Substituindo, teremos:
l
4
g
13
2 4
k2
1
sen2
2
1
0
T
sen 2
. Assim, quando
sen 20
arcs e n
2
1
2
2
K sen
Observe que:
0
2
sen 20
cos d
cos 2
d
1
2
1
2
1 k 2 sen2
Série:
K k
cos 2 d
d
F( 2 , k)
0
2
Fazendo a mudança de variável:
sen 2 sen 20 sen
K k
F( , k)
2
K (k )
0
2
Notas de aula – Capítulo 1 – Física II – Oscilações Simples – Prof. Dr. Cláudio S. Sartori
Pêndulo físico
Exemplos
Pêndulo físico é chamado de pêndulo real,
pois não tem uma distribuição uniforme de massa.
Para pequenas amplitudes, o cálculo do
período é :
T
2
1.
Imagine que você está numa
embarcação que oscila na água para cima e para
baixo. O deslocamento vertical y da embarcação é:
I
m g h
, onde:
I: momento de inércia,
m: massa do pêndulo,
g: é o valor da aceleração da gravidade e
h: é a distância do ponto de pivô onde o
pêndulo está fixo até seu centro de massa.
Se o ponto de apoio O (de pivô) estiver em
seu centro de massa C, não haverá oscilação.
y
t
2s
1, 2m cos
6
(a) Determinar a amplitude, a freqüência
angular, a constante de fase, a freqüência e o período
do movimento.
(b) Qual a posição da embarcação no instante
t = 1 s?
(c) Determinar a velocidade e a aceleração
iniciais da embarcação.
(d) Determinar a posição, a velocidade e a
aceleração iniciais da embarcação.
Solução:
(a)
y
1, 2m cos
2
ym cos
6
1 rad
;
2 s
ym = 1.2m;
T
t
2s
T
4
6
t
rad
s
(b)
y t 1
y t 1
y t 1
(c)
vy
ay
dy
dt
dv
dt
1
2s 6
1, 2m cos 1.024
1, 2m cos
1.2m cos 1.024
t
2
t
0.3cos
2
0.6sen
0.624m
6
6
(d)
y t
0
1, 2m cos
0
2s
6
0.6 sen
0
2s
6
0.3 cos
0
2s
6
y0 1.04m
vy t
0
v y0
0.3 ms
ay t
0
ay0
0.260 sm2
2. Um corpo de 0.8 kg está preso a uma
certa mola de constante elástica k = 400 N/m.
Calcular a freqüência e o período do movimento do
corpo quando for ligeiramente deslocado da posição
de equilíbrio.
10
Notas de aula – Capítulo 1 – Física II – Oscilações Simples – Prof. Dr. Cláudio S. Sartori
k
m
400
0.8
2
T
1
T
f
T
f
0.28s
xm
x
x t
0.25
8
0.042
arctg
v0
x0
0rad
v0
x0
2
x t
(a)
2
0.0506m
5 cos 9.90 t cm
Solução:
dx
dt
v
d
5 cos 9.90 t
dt
xm sen
t
v t
vm
xm
vm 9.9 0.05 495 cms
0.66rad
(b)
(b)
xm cos
x t
5.06 cos 8 t 0.66 cm
t
4. Um corpo de 2kg está preso a uma mola.
A constante de força da mola é de k = 196 N/m. O
corpo, inicialmente, está a 5 cm de distância da
posição de equilíbrio e é solto no instante t = 0.
(a) Calcular a freqüência angular , a
freqüência f e o período T do movimento.
(b) Dar a equação de x em função do tempo t.
sen
t
1
t
t
2
T
k
m
2
a
dv
dt
a t
(d) t = 0s.
196
2
T
9.90 rad
s
0.633s
,
2
2 9.90
(c)
am
Solução:
3 5
,
2 2 2
t
d
dt
xm sen
2
am
(a)
11
5 cos 9.90 t cm
x t
0.05m
5. Seja um corpo preso a uma mola com o
movimento descrito pela equação:
(Amplitude máxima)
x0 = 4 cm =0.04m
v0 = -25 cm/s = 0.25 m/s
= 8 rad/s
xm
0.05
2
(a) Qual a velocidade máxima do corpo?
(b) Em que instante o corpo tem esta
velocidade máxima?
(c) Qual a aceleração máxima do corpo?
(d) Em que instante o corpo tem essa
aceleração máxima?
Solução:
(a)
xm
arctg
v0
1.58Hz
0
9.90
2
3.56Hz
2
0
f
(b) x0 = 5 cm =0.05m
v0 = 0 m/s
= 9.90 rad/s
22.36 rads
3.
Um corpo oscila com freqüência
angular de 8 rad/s. No instante t = 0s, o corpo está na
posição x0 = 4 cm, com a velocidade inicial v0=-25
cm/s.
(a) Determinar a amplitude do movimento.
(b) Dar x em função do tempo.
1
T
f
Solução:
2
xm cos
2
xm
9.9 0.05 490 cm
s2
t
t
0.159s
Notas de aula – Capítulo 1 – Física II – Oscilações Simples – Prof. Dr. Cláudio S. Sartori
6. Um corpo preso a uma mola, de massa
3kg, oscila com amplitude 4 cm e período 2s.
(a) Qual a energia mecânica total do sistema?
(b) Que velocidade máxima tem o corpo?
(c) Em que posição x1 a velocidade é metade
da velocidade máxima?
(a)
T
T
7. Um corpo de 3 kg, pendurado numa certa
mola, provoca o esticamento de 16 cm. O corpo é
deslocado ligeiramente dessa posição de equilíbrio e
solto para que oscile preso à mola.
(a) Determinar a freqüência do movimento.
(b) Determinar a freqüência se o corpo de 3 kg
for substituído por um de 6 kg.
Solução:
2
m g
m
k
2
k
Solução:
(a)
4
f
m
T2
2
k
4
k
2
(b) E
m vm 2
2
(c) E
K U
k xm
E
2
29.6 0.042
E
2
E 2.37 10 2 J
2 E
vm
0.126 ms
m
2
m v k x2
2
2
E
m
vmax 2
2
2
f
(b) f
2
k x2
2
x = 3.46 cm.
k
m g
y0
184 Nm
2
3
22
29.6 Nm
k y0
8.
vmax.
1
2
Calcular
1
2
k
m2
k
m1
1.25 Hz
0.884 Hz
no exemplo anterior e determinar
Resposta
= 3.14 rad/s; vmax=0.126 m/s.
9. Um corpo de 2 kg e massa oscila preso a
uma mola de k = 40 N/m. Sua velocidade é 25 cm/s
quando está na posição de equilíbrio.
(a) Qual a energia total do sistema oscilante?
(b) Qual a amplitude do movimento?
Resposta
(a) 0.0625J.
(b) 5.59 cm.
10.
Um corpo de 4 kg, pendurado numa
mola, provoca o esticamento de 16 cm. O corpo é
deslocado ligeiramente dessa posição de equilíbrio e
solto para que oscile preso à mola.
(a) Determine a freqüência do movimento.
(b) Determine a freqüência se o corpo for
substituído por outro de 8 kg.
11. Uma plataforma oscila com freqüência de
4 Hz e amplitude 7 cm, presa a uma mola vertical.
Uma pequena conta é pousada na plataforma no exato
momento em que ela se encontra na posição mais
baixa. Admita que a conta seja leve de forma que não
altere a oscilação.
(a) A que distância da posição de equilíbrio
da plataforma sobre a mola a conta perde contato com
a plataforma?
(b) Qual a velocidade da conta no instante
em que abandona a plataforma?
12
Notas de aula – Capítulo 1 – Física II – Oscilações Simples – Prof. Dr. Cláudio S. Sartori
Resposta
(a) 1.55cm.
(b) 1.72 m/s.
(a)
12.
O corpo de 3 kg do exemplo
anterior estica 16 cm a mola quando pendurado na
vertical e em equilíbrio. A mola é então alongada
outros 5 cm em relação à posição de equilíbrio e o
sistema é solto para oscilar livremente. Calcular a
energia total e a energia potencial da mola quando o
corpo está na posição de deslocamento máximo.
E = 0.23 J.
1.70 J.
Resposta
13.
Calcular o período de oscilação de
um pêndulo simples com 1 m de comprimento.
T = 2.01 s.
Resposta
14. Um
pêndulo
simples
com
o
comprimento de 1 m está num vagão que se desloca
com aceleração a0 = 3m/s2. Calcular a aceleração g´ e
o período T.
(b)
T
T
15. Um relógio de pêndulo é calibrado para
manter o período exato de oscilação com um ângulo
= 100. Se a amplitude das oscilações diminuir e ficar
muito pequena, o relógio irá adiantar ou atrasar? Qual
o valor do atraso ou do adiantamento em um dia?
Resposta
Adianta. 2.74 min por dia.
16.
Uma barra homogênea de massa M
e comprimento L está suspensa por uma das
extremidades.
(a) Calcular o período da oscilação quando
os deslocamentos angulares forem pequenos.
(b) Calcular o período de oscilação se o
ponto de suspensão P estiver à distância x do centro
de massa.
2
2 l
3 g
2
1 2
l x2
12
x g
17.
Qual o período de oscilação, com
deslocamentos angulares pequenos, de uma barra de
um metro suspensa por uma de suas extremidades?
T = 1.64 s.
Resposta
18. Mostrar que, quando x = l/6, o período é
igual ao da oscilação quando x = l/2.
19.
Determinar o valor de x, no
exemplo 16, para o qual o período é um mínimo.
x
Resposta
g´= 10.3 m/s2 e T = 1.96s.
Resposta
Resposta
l
12
13
Notas de aula – Capítulo 1 – Física II – Oscilações Simples – Prof. Dr. Cláudio S. Sartori
Beer Johnston – Capítulo 19
19.1 Um ponto material desloca-se em
movimento harmônico simples com aceleração
máxima de 3,00 m/s2 e sua máxima velocidade, 150
mm/s. Determine a amplitude e a freqüência do
movimento.
19.2 Determine a máxima velocidade e a
máxima aceleração do um ponto material que se
move em movimento harmônico simples com
amplitude de 150 mm e período de 0.90s.
19.3 O cursor está preso à mola ilustrada na
figura e pode deslizar sem atrito na barra horizontal.
Se o cursor for afastado 0.102 m de sua posição de
equilíbrio e liberado, determinar o período, a
velocidade máxima e a aceleração máxima do
movimento resultante. A massa vale 2.27 kg e a
constante da mola, 525 N/m.
A
19.4 Um cursor de 1,36 kg está preso a uma
mola de constante 700 N/m e poda deslizar sem atrito
ao longo de uma haste horizontal. O cursor
inicialmente em repouso receba um golpe, adquirindo
uma velocidade de 1.27 m/s. Determine a amplitude e
a máxima aceleração do cursor durante o movimento
subseqüente.
19.5 Um motor de velocidade variável está
rigidamente preso à viga BC. O motor está
ligeiramente desbalanceado e faz a viga vibrar com
freqüência angular igual à velocidade do motor.
Quando a velocidade do motor é menor que
450 rpm ou mais que 900 rpm, observa-se que um
pequeno objeto colocado em A permanece em contato
com a viga. Para velocidades entra 450 e 900 rpm o
objeto "dança" e realmente perde o contato com a
barra. Determine a amplitude do movimento de A
quando a velocidade do motor é:
(a) 450 rpm, (b) 900 rpm.
A
19-6. Coloca-se um pacote B sobra uma
mesa oscilante, como indica a figura. A mesa se
move horizontalmente em movimento harmônico
simples com freqüência de 3 Hz. Sabendo que o
coeficiente de atrito estático pacote-mesa é = 0.40,
determine a máxima amplitude do pacote para que ele
não escorregue da mesma.
19.7 O cursor de 3.00 kg repousa sobre,
mas não está preso a, a mola Ilustrada. O cursor é
pressionado 0.050 m e liberado. Se o movimento que
se segue é harmônico, determine
(a) o valor máximo permissível da
constante k da mola
(b) a posição, a velocidade e a aceleração
do cursor 0.15 s após ele ter sido solto.
14
19.8 Um cursor de 4.00 kg está preso a uma
mola de constante k = 800N/m como ilustrado. Se a
ele é dado um deslocamento de 40 mm para baixo de
sua posição de equilíbrio, determine
(a) o tempo necessário para o cursor
mover-se 60 mm para cima e
(b) a sua aceleração correspondentes.
19.9 Um cursor de 1.36 kg está ligado a
uma mola da constante k = 876 N/m como ilustrado.
Se deslocarmos o cursor 63.5 mm para baixo da sua
posição de equilíbrio, determine
(a) o tempo gasto pelo cursor para ele se
mover 50.8 mm para cima
(b) suas correspondentes velocidade e
aceleração.
19.10 No Problema 19.9, determine a
posição, a velocidade e a aceleração do cursor, 0.20s
após sua liberação.
19.11 e 19.12 Sustenta-se um bloco por
meio de molas, como indicam as figuras. Se
movermos o bloco verticalmente para baixo de sua
posição de equilíbrio e então o soltarmos, determine:
(a) o período e a freqüência do movimento
e
(b) a velocidade e a aceleração máxima
atingidas pelo bloco para uma amplitude de 0,0318 m.
2.63 kN/m
1.75 kN/m
2.63 kN/m
Notas de aula – Capítulo 1 – Física II – Oscilações Simples – Prof. Dr. Cláudio S. Sartori
19.13 e 19.14 O bloco mostrado na figura
foi deslocado verticalmente para cima da posição de
equilíbrio, e, então, liberado. Determine
(a) o período e a freqüência do movimento
adquirido pelo bloco e
(b) a velocidade e a aceleração máximas
para um movimento com amplitude de 25 mm.
constante da mola C vale 100N/m,
massa m da bandeja.
determinar a
19.19 Um cursor de massa m desliza
sem atrito numa barra horizontal e está presa
uma mola AB de constante k.
(a) Se o comprimento da mola não
deformada é exatamente ic mostre que o cursor
não executa um movimento harmónico simples
mesmo quando as osc são de pequena amplitude,
(b) Se o comprimento da mola não
deformada é menor que /, mós;
o movimento é harmónico simples para pequenas
amplitudes.
19.15 O período de vibração do sistema
indicado na figura é de 0.40s. Com a remoção do
cilindro B, o período se torna igual a 0.30 s.
Determine:
(a) a massa do cilindro
(b) a constante elástica da mola.
19.16 O período de vibração do sistema
indicado na figura é 1.5º s. Se substituirmos o cilindro
B por outro de peso igual a 17.8 N, o período passará
a ser de 1.6 8. Determinar
(a) a massa do cilindro A e
(b) a constante da mola.
19.17 Uma bandeja de massa m, presa a três
molas tem o período de vibração igual a 0.50s.
Colocando-se um bloco de 1.50 kg sobre a bandeja, o
período se altera para 0.60 s. Sabendo que a amplitude
das vibrações é pequena, determine a massa m da
bandeja.
19.18 O período de vibração do sistema
bandeja-molas é 0.75s. Removendo-se a mola central
C, o período se altera para 0.90 s. Sabendo-se que a
19.20 A barra AB esta presa d uma
articulação A e a duas molas, cada uma de constante
elástica k. Quando h = 0,60 m, d = 0.25 m e m =
25kg, determine o valor de k para que o período de
pequenas oscilações seja
(a) 1.0 s.
(b) infinito.
Despreze o peso da barra e suponha que
cada mola pode atuar tanto na tração como na
compressão.
19.21 Se d = 0.40m, h = 0.60m e cada mola
tem uma constante elástica k = 700 N/m, determine a
massa m para a qual o período de oscilações pequenas
é
(a) 0.50s
(b) infinito.
15
Notas de aula – Capítulo 1 – Física II – Oscilações Simples – Prof. Dr. Cláudio S. Sartori
19.22 Denotando por est a deflexão estática
de uma viga sob uma determinada carga, mostre que a
freqüência de vibração da carga é:
1
2
f
g
est
19.23 Desenvolvendo o integrando de:
T
4
l
g
0
0
1
sen 2
0
2
sen 2
d
2
Numa série de potências pares de sen e integrando,
mostre que o período de um pêndulo simples de
comprimento l pode ser dado aproximadamente pela
fórmula:
T
Onde
m
2
l
1
1
sen2 m
g
4
2
é a amplitude das oscilações.
19.24 Utilizando a fórmula dada anterior,
determine a amplitude m para a qual o período de um
pêndulo simples é 1% maior que o período do mesmo
pêndulo para pequenas oscilações.
19.25 Utilizando os dados da tabela 19.1,
determine o período de um pêndulo simples de
750mm de comprimento
(a) para pequenas oscilações,
(b) para oscilações de amplitude m = 600 e
(c) para oscilações de amplitude m = 900.
19.26 Utilizando a tabela de integrais
elípticas, determine o período de um pêndulo simples
de comprimento l = 750 mm se a amplitude das
oscilações é de m = 500.
16
Notas de aula – Capítulo 1 – Física II – Oscilações Simples – Prof. Dr. Cláudio S. Sartori
Utilizando o programa Interactive Physics
(www.interactivephysics.com) fazer a leitura do
arquivo osh.ip
Atividade
1a Parte:
Fazer as simulações indicadas na tabela a
seguir, seguindo o procedimento:
i
1
2
3
4
5
6
7
k
(N/m)
50
50
100
100
500
10000
m
(kg)
1
1
2
2
5
10
v0
(m/s)
0
0,50
0
1,00
0
0,50
L
(m)
1,75
1,75
1,75
1,50
1,80
1,80
x0
(m)
T
(s)
f
(Hz)
0
(rad/s)
xm
(m)
(0)
vm
(m/s)
am
(m/s2)
17
Trabalho PARTE 2 – Mecânica Aplicada – Prof. Dr. Cláudio S. Sartori
Procedimento para simulações:
1. Escolha o botão do controle da constante
elástica k da mola e coloque o valor indicado na
simulação.
2. Escolha o botão do controle da massa do
bloco e coloque o valor indicado na simulação.
3. Clique duas vezes no bloco e altere o valor
da posição inicial x0 e da velocidade inicial v0 de
acordo com a simulação i.
4. Clique duas vezes com o botão esquerdo do
mouse sobre a mola e confira os valores de L e L0 da
mola.
5. Faça a simulação e observe os gráficos x(t),
v(t) e a(t).
6. Confira os valores indicados como mostra a
tabela que você completou em sala de aula.
7. Faça as simulações usando o programa
graphdpr, acessando oscilações mecânicas, e construa
os gráficos, para cada simulação:
x(t) versus t.
v(t) versus t.
a(t) versus t.
Ec(t) versus t.
Ep(t) versus t.
EM(t) versus t.
Faça o download em:
www.claudio.sartori.nom.br
8. Confira os dados calculados em classe com a
execução do programa graphdpr.
Formulário – Oscilador Harmônico
Posição x(t):
x(t) xmsen( 0t
)
Ou
x(t) xm cos( 0t
Velocidade v(t):
dx
dt
v(t )
Aceleração a(t):
dv
dt
a(t )
Freqüência angular:
0
k
m
Freqüência:
f
Período:
0
2
2
T
)
1
f
0
Máxima amplitude xm:
2
0
xm
x
v0
2
0
(se
x(t) xmsen( 0t
))
Fase :
arctg
(se
v0
x0
x(t) xmsen( 0t
))
2a Parte:
Utilizando o programa Interactive Physics
(www.interactivephysics.com) fazer a leitura do
arquivo osh2.ip e osh3.ip.
Trabalho PARTE 2 – Mecânica Aplicada – Prof. Dr. Cláudio S. Sartori
Problemas
1. Para cada caso:
(a) Encontre a freqüência angular
Encontre o período T e a freqüência f.
Complete a tabela.
Caso
i
1
2
3
ke
(N/m)
m
(kg)
0,75
0,75
0,75
v0
(m/s)
0
0
0
0
(rad/s)
x0
(m)
0,25
0,25
0,25
T
(s)
0
natural.
f
(Hz)
k
m
(b) O valor da amplitude de deformação para
cada valor da tabela dada:
0
m
xm
2
1
0
(b) As equações x(t), v(t) e a(t) para cada caso,
onde x0 = 0.25 m e v0 = 0m/s.
Dados:
k = 50N/m; m = 0,75 kg
xm
(m)
(rad/s)
0.2 0
0.4 0
0.6 0
0.8 0
1.2 0
1.8 0
2.0 0
4.0 0
(c) Faça um gráfico de
xm
versus
m
0
(d) Faça os gráficos de x(t), v(t) e a(t) usando
x0=0.25m e v0=0 para cada do item (c).
3.
2.
Dado o sistema da figura:
Dado o pêndulo simples com
0
= 20.
(a) Faça o cálculo do período para:
l = 0,2 m e l = 0,3 m.
(b) Encontre a freqüência angular para os valores
do comprimento do pendulo acima.
(c) Ache a função s(t) sabendo que em t = 0 v0=0.
Dados:
k = 300N/m; m = 0,75 kg e Fm = 50 N.
(a) O valor da freqüência de ressonância:
MA - N1- Mecânica Aplicada – Oscilações Forçadas, Amortecidas e amortecidas forçadas
1
Procedimento para simulações:
9. Escolha o botão do controle da constante elástica k
da mola e coloque o valor indicado na simulação.
10. Escolha o botão do controle da massa do bloco e
coloque o valor indicado na simulação.
11. Clique duas vezes no bloco e altere o valor da
posição inicial x0 e da velocidade inicial v0 de acordo com a
simulação i.
12. Clique duas vezes com o botão esquerdo do mouse
sobre a mola e confira os valores de L e L0 da mola.
13. Faça a simulação e observe os gráficos x(t), v(t) e
a(t).
14. Confira os valores indicados como mostra a tabela
que você completou em sala de aula.
15. Faça as simulações usando o programa graphdpr,
acessando oscilações mecânicas, e construa os gráficos,
para cada simulação:
x(t) versus t.
v(t) versus t.
a(t) versus t.
Ec(t) versus t.
Ep(t) versus t.
EM(t) versus t.
Faça o download em:
www.claudio.sartori.nom.br
16. Confira os dados calculados em classe com a
execução do programa graphdpr.
17. Em oscilações livres forçadas há a possibilidade de
construir os gráficos com:
Fm
m
2
2
Máxima amplitude xm:
m
xm
2
1
0
xm sen t
x(t) xH (t) xP (t)
x(t) Asen( 0t) B cos( 0t) xmsen t
Período:
0
Posição x(t):
Velocidade v(t):
v(t )
Freqüência:
T
xH (t) Asen( 0t) B cos( 0t)
k
m
f
r
x P (t )
Freqüência angular:
0
Formulário – Oscilador Harmônico e
forçado
dv
dt
a(t )
dx
dt
Aceleração a(t):
1
1
f
0
2