Geometria
Plana e Espacial
Um Estudo Axiomático
300 exercícios propostos
Mais de 400 ilustrações
150 exemplos
João Roberto Gerônimo
Valdeni Soliani Franco
Geometria Plana e Espacial
Um Estudo Axiomático
João Roberto Gerônimo
Valdeni Soliani Franco
fevereiro de 2006
Maringá – PR
iv
Apresentação
Neste trabalho temos como objetivo apresentar um estudo
axiomático da geometria euclidiana plana e espacial. Ele está escrito em
termos de geometria clássica, mas utilizando uma linguagem moderna
e com um certo rigor nas demonstrações.
Salientamos que na Geometria Espacial, admitiremos todos os
resultados obtidos na Geometria Plana.
O texto está dividido em 16 capítulos sendo que o primeiro
capítulo é introdutório, os capítulos de 2 a 9 tratam da geometria
plana e os capítulos de 10 a 16 tratam da geometria espacial. Mais
especifica-mente, no Capítulo 1, apresentamos uma introdução
histórica onde justificamos a abordagem escolhida para o texto. No
Capítulo 2, estuda-mos os primeiros axiomas e seus principais
resultados na geometria plana. No Capítulo 3, apresentamos os
axiomas sobre medidas de segmentos e ângulos. No Capítulo 4,
estudamos a congruência entre triângulos. No Capítulo 5, tratamos do
principal axioma da Geometria Euclidiana, que por mais de dois mil
anos acreditaram que era conseqüência dos outros axiomas.
No Capítulo 6, tratamos de áreas de regiões poligonais. No
Capítulo 7, estudamos os casos de semelhança em triângulos e como
consequência o Teorema de Tales. No Capítulo 8, estudamos as
propriedades da circunferência e do círculo. No Capítulo 9, estudamos
as relações métricas existentes nos triângulos. No Capítulo 10,
apresen-tamos os primeiros axiomas e seus principais resultados
relativos ao espaço euclidiano. No Capítulo 11, estudamos as relações
de paralelis-mo entre retas e planos e entre planos e planos. No
Capítulo 12, estudamos as relações de perpendicularismo entre retas e
planos e entre planos e planos. No Capítulo 13, utilizamos as relações
de perpendicularismo e paralelismo para definir distâncias, ângulos,
diedros e triedros. No Capítulo 14, definimos poliedros e classificamos
os poliedros regulares e os de Platão. No Capítulo 15, estudamos a
esfera e suas propriedades. Para finalizar, no Capítulo 16, estudamos
áreas e volumes de figuras geométricas espaciais.
No Apêndice A apresentamos um pequeno relato sobre a obra
“Os Elementos” de Euclides.
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
No Apêndice B indicamos uma página na internet com a
resolução dos exercícios propostos no livro em formato PDF.
Deixamos também disponibilizados as figuras encontradas no texto.
Para resolver estes exercícios contamos com a colaboração inicial dos
ex-acadêmicos Ademir Pastor Ferreira, Vânia Batista Marinho e Waldir
Soares Júnior.
Neste texto empregamos uma linguagem contemporânea
onde falamos de conjuntos, relações e funções, conceitos que, a
priori, não precisam ser compreendidos de forma mais aprofundada,
mas utilizando apenas o conhecimento do Ensino Médio. Estes
conceitos podem ser vistos com detalhes em [2].
Gostaríamos de registrar nossos agradecimentos aos alunos
das turmas de 1999, 2000, 2001, 2002, 2003, 2004 e 2005 do curso de
matemática da UEM e ao professor Marcelo Escudeiro Hernandes,
pelas sugestões apresentadas. Queremos agradecer também aos
alunos de Especialização em Matemática da UEMS – Dourados – MS,
pelas sugestões e correções feitas nos capítulos relacionados a
Geometria Plana.
Maringá, 15 de fevereiro de 2006
vi
Índice
CAPÍTULO 1: INTRODUÇÃO .......................................................... 1
CAPÍTULO 2: INCIDÊNCIA E ORDEM NO PLANO .................... 8
2.1. AXIOMAS DE INCIDÊNCIA ............................................................. 8
2.2. AXIOMAS DE ORDEM .................................................................. 12
2.3. ORDENANDO UMA RETA ............................................................ 20
2.4. POLÍGONOS ................................................................................ 23
2.5. EXERCÍCIOS ................................................................................ 25
CAPÍTULO 3: SEGMENTOS, ÂNGULOS E MEDIDAS .............. 29
3.1. MEDIDAS DE SEGMENTOS .......................................................... 29
3.2. MEDIDAS DE ÂNGULOS .............................................................. 37
3.3. CONGRUÊNCIA DE SEGMENTOS E ÂNGULOS ............................... 44
3.4. EXERCÍCIOS ................................................................................ 48
CAPÍTULO 4: CONGRUÊNCIA DE TRIÂNGULOS ................... 52
4.1. O CASO LAL .............................................................................. 54
4.2. O CASO ALA ............................................................................. 60
4.3. O CASO LLL .............................................................................. 62
4.4. O CASO LAAO ............................................................................ 65
4.5. O CASO LLA ............................................................................ 67
4.6. EXISTÊNCIA DE PERPENDICULARES E PARALELAS...................... 70
4.7. DISTÂNCIA DE PONTO A RETA E DESIGUALDADE TRIANGULAR . 71
4.8. EXERCÍCIOS ................................................................................ 75
CAPÍTULO 5: AXIOMA DAS PARALELAS ................................. 80
5.1. O AXIOMA DAS PARALELAS ....................................................... 80
5.2. TRIÂNGULOS E QUADRILÁTEROS ............................................... 86
5.3. TEOREMA DAS PARALELAS ........................................................ 95
5.4. EXERCÍCIOS ................................................................................ 98
CAPÍTULO 6: REGIÕES POLIGONAIS E ÁREAS ................... 102
6.1. REGIÕES POLIGONAIS ............................................................... 103
6.2. ÁREAS ...................................................................................... 108
6.3. TEOREMA DE PITÁGORAS ......................................................... 112
6.4. EXERCÍCIOS .............................................................................. 116
CAPÍTULO 7: SEMELHANÇA DE TRIÂNGULOS E O
TEOREMA DE TALES ................................................................... 120
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
7.1. SEQUÊNCIAS PROPORCIONAIS .................................................. 120
7.2. TEOREMA DE TALES ................................................................. 123
7.3. SEMELHANÇA ........................................................................... 124
7.4. EXERCÍCIOS .............................................................................. 128
CAPÍTULO 8: CIRCUNFERÊNCIA E CÍRCULO ...................... 132
8.1. TANGENTES .............................................................................. 134
8.2. ÂNGULO INSCRITO ................................................................... 137
8.3. PERÍMETRO DE UMA CIRCUNFERÊNCIA .................................... 146
8.4. ÁREA DE UM CÍRCULO.............................................................. 155
8.5. EXERCÍCIOS .............................................................................. 159
CAPÍTULO 9: TRIGONOMETRIA .............................................. 163
9.1. FUNÇÕES TRIGONOMÉTRICAS .................................................. 163
9.2. RELAÇÃO FUNDAMENTAL ........................................................ 165
9.3. AMPLIANDO O DOMÍNIO ........................................................... 170
9.4. LEI DOS COSSENOS ................................................................... 173
9.5. LEI DOS SENOS ......................................................................... 174
9.6. EXERCÍCIOS. ............................................................................. 175
CAPÍTULO 10: INCIDÊNCIA E ORDEM NO ESPAÇO ........... 180
10.1. AXIOMAS DE INCIDÊNCIA ....................................................... 181
10.2. DETERMINAÇÃO DE PLANOS .................................................. 186
10.3. AXIOMA DE ORDEM ............................................................... 188
10.4. ÂNGULOS ENTRE RETAS ......................................................... 191
10.5. EXERCÍCIOS ............................................................................ 194
CAPÍTULO 11: PARALELISMO NO ESPAÇO E SUAS
CONSEQÜÊNCIAS ......................................................................... 198
11.1. PARALELISMO ENTRE RETAS E PLANOS.................................. 198
11.2. PARALELISMO ENTRE PLANOS ................................................ 200
11.3. TEOREMA DE TALES ............................................................... 207
11.4. EXERCÍCIOS ............................................................................ 210
CAPÍTULO 12: PERPENDICULARISMO NO ESPAÇO E SUAS
CONSEQÜÊNCIAS .......................................................................... 214
12.1. PERPENDICULARISMO ENTRE RETAS E PLANOS ...................... 214
12.2. PERPENDICULARISMO ENTRE PLANOS .................................... 222
12.3. EXERCÍCIOS ............................................................................ 225
CAPÍTULO 13: PROJEÇÕES, DISTÂNCIAS, ÂNGULOS,
DIEDROS E TRIEDROS ................................................................. 229
13.1. DISTÂNCIA DE PONTO A PLANO ............................................. 229
13.2. DISTÂNCIA ENTRE RETAS REVERSAS ..................................... 236
viii
Índice
13.3. ÂNGULO ENTRE PLANOS E ENTRE RETA E PLANO .................. 238
13.4. DIEDROS................................................................................. 241
13.5. TRIEDROS ............................................................................... 246
13.6. EXERCÍCIOS ............................................................................ 256
CAPÍTULO 14: POLIEDROS ........................................................ 260
14.1. FIGURAS POLIÉDRICAS ........................................................... 260
14.2. SUPERFÍCIES POLIÉDRICAS ..................................................... 262
14.3. POLIEDROS ............................................................................. 263
14.4. FÓRMULA DE EULER .............................................................. 265
14.5. POLIEDROS DE PLATÃO .......................................................... 270
14.6. POLIEDROS REGULARES ......................................................... 275
14.7. EXERCÍCIOS ............................................................................ 277
CAPÍTULO 15: SUPERFÍCIE ESFÉRICA E ESFERA .............. 280
15.1. CONCEITO E PROPRIEDADES ................................................... 280
15.2. DETERMINAÇÃO DE UMA SUPERFÍCIE ESFÉRICA .................... 281
15.3. POSIÇÕES RELATIVAS............................................................. 283
15.4. SUPERFÍCIE ESFÉRICA E SUAS PARTES .................................... 287
15.5. EXERCÍCIOS ............................................................................ 290
CAPÍTULO 16: ÁREAS E VOLUMES .......................................... 294
16.1. AXIOMAS................................................................................ 294
16.2. PRISMA ................................................................................... 295
16.3. PIRÂMIDE ............................................................................... 297
16.4. CILINDRO ............................................................................... 301
16.5. CONE ...................................................................................... 303
16.6. ESFERA................................................................................... 306
16.7. EXERCÍCIOS ............................................................................ 312
REFERÊNCIAS BIBLIOGRÁFICAS ............................................ 316
APÊNDICE A: O LIVRO “OS ELEMENTOS” DE EUCLIDES 319
APÊNDICE B: RESOLUÇÃO DOS EXERCÍCIOS ..................... 322
ix
Capítulo 1: Introdução
A geometria1 surgiu há aproximadamente 4.000 anos no Egito
e na Babilônia, de uma maneira intuitiva, não sistemática, com uma
série de regras práticas sugeridas pela experiência, objetivando
principalmente aplicações às medições. De fato, as relações desta
sociedade, baseadas na propriedade, impuseram a necessidade de
medir.
Por outro lado, a geometria com um caráter dedutivo, apoiado
em proposições gerais, teve seu início na antiga Grécia, com Tales de
Mileto2 e Pitágoras3.
Mas foi Euclides4, na sua famosa obra Os Elementos (Ver
Apêndice A), o primeiro a apresentar um sistema axiomático para a
geometria, ou seja, um sistema formado por noções primitivas,
definições, axiomas e teoremas. Os axiomas são o começo dessa
cadeia dedutiva e são as afirmações não demonstradas, que Euclides
chamou de postulado (aquilo que não se pode). Euclides procurou
escolher como postulados e afirmações que, por sua simplicidade,
seriam aceitas por qualquer pessoa de bom senso e que eram, em um
certo sentido, evidentes por si mesmas.
Acontece que os quatro primeiros postulados de Euclides,
enunciados a seguir satisfazem essas condições de simplicidade e
evidência, mas o quinto nem tanto, como vocês poderão perceber.
1. Dois pontos determinam uma reta.
1
Palavra de origem grega: “geo” significa “terra” e “metria” significa “medida”.
Tales de Mileto nasceu por volta de 624 a.C. em Mileto, Ásia Menor (atualmente
Turquia) e morreu por volta de 547 a.C. em Mileto. Tales de Mileto foi o primeiro filósofo grego,
cientista e matemático conhecido. A ele é creditado cinco teoremas da geometria elementar [7].
3 Pitágoras de Samos nasceu por volta de 569 a.C. em Samos, Ionia e morreu por volta
de 475 a.C. Pitágoras foi um filósofo grego que fez importantes descobertas na matemática,
astronomia e na teoria musical. O teorema hoje conhecido como Teorema de Pitágoras era
conhecido pelos Babilônios 1000 anos atrás mas ele foi o primeiro a demonstrá-lo [7].
4 Euclides de Alexandria nasceu por volta de 325 a.C. e morreu por volta de 265 a.C.
em Alexandria, Egito. Euclides é o mais notável matemático da antigüidade. Foi mais conhecido
pelo tratado sobre geometria denominado Os Elementos [7].
2
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
2. A partir de qualquer ponto de uma reta dada é possível marcar um
segmento de comprimento arbitrário.
3. É possível obter uma circunferência com qualquer centro e
qualquer raio.
4. Todos os ângulos retos são iguais.
s
5. Se uma reta r corta duas outras retas5 s
e t (no mesmo plano) de modo que a
soma dos ângulos interiores ( e ) de
um mesmo lado de r é menor que dois
t
retos, então s e t , quando prolongadas
suficientemente, se cortam daquele
r
lado de r.
O próprio Euclides deve ter considerado o quinto postulado
pouco evidente, tanto que ele retardou o quanto possível o uso deste
postulado. Já na Antigüidade, Proclus6 não aceitava o quinto
postulado, pois achava que este poderia ser demonstrado a partir dos
conceitos básicos da obra euclidiana, sendo, portanto, na realidade
um teorema. Mas a maior parte das tentativas de demonstração do
quinto postulado admitiam fatos que ou eram equivalentes a ele, ou
não podiam ser demonstrados usando unicamente os outros quatro
postulados. Grandes nomes na matemática tentaram sem sucesso a
demonstração do quinto postulado.
A negação do quinto postulado, e assim sua independência em
relação aos outros quatro, levaram a criação de outras geometrias. A
primeira geometria não Euclidiana foi publicada de maneira
independente e quase simultânea pelo matemático russo N. I.
Lobachewsky7 em 1829 e pelo matemático J. Bolyai8 em 1832. Tal
geometria é hoje chamada geometria hiperbólica.
5
No início do capítulo 2 apresentaremos as notações para pontos, retas, ángulos, etc.
Os desenhos também farão parte do texto como forma de fixar melhor as idéias e resultados
apresentados .
6 Proclus Diadochus nasceu em 8 de fevereiro de 411 em Constantinopla (atualmente
Istambul), Byzantium (atualmente Turquia) e morreu em 17 de Abril de 485 em Atenas, Grécia.
Proclus não foi um matemático criativo; mas foi um expositor crítico e detalhista, com um bom
conhecimento dos métodos matemáticos e um conhecimento detalhado de milhares de anos da
Matemática Grega de Tales até os seus dias [7].
7 Nikolai Ivanovich Lobachewsky nasceu em 1 de dezembro de 1792 em Nizhny
Novgorod, Rússia e morreu em 24 de fevereiro de 1856 em Kazan, Rússia. Em 1829 Lobachevsky,
publicou sua geometria não-euclidiana, o primeiro tratado deste tema a ser impresso [7].
2
1. Introdução
Durante muito tempo distinguiu-se axioma de postulado. Os
axiomas eram proposições evidentes por si mesmas e postulados
eram proposições que se pediam fossem aceitas sem demonstração.
Hoje, axiomas e postulados são designações das proposições
admitidas sem demonstração, na verdade, atualmente emprega-se
sempre a palavra axioma em lugar de postulado.
Existem outras versões para os postulados da geometria plana
que são encontrados nos Os Elementos de Euclides. David Hilbert9
construiu um sistema de axiomas para a geometria Euclidiana [3]
consistindo de cinco grupos, a saber:
I - Axiomas de incidência: Neste grupo são apresentados oito axiomas
dos quais três são relacionados ao plano e cinco são relacionados ao
espaço. Estes axiomas estabelecem as relações mútuas entre ponto e
reta.
II - Axiomas de ordem: Neste grupo são apresentados quatro axiomas
e com eles é possível fazer a ordenação dos pontos sobre uma reta,
um plano e no espaço.
III - Axiomas de congruência: Neste grupo são apresentados cinco
axiomas dos quais três são relacionados a congruência de segmentos,
um relacionado a congruência de ângulos e um relacionado a
congruência de triângulos.
IV - Axioma das paralelas: Este axioma estabele a unicidade de uma
reta paralela a uma reta dada passando por um ponto. Neste grupo
temos apenas um mas é o mais importante pois é ele que caracteriza a
geometria euclidiana.
V - Axiomas de continuidade: Este grupo é constituído de dois axiomas
a saber: axioma de Arquimedes10 e axioma de Dedekind11.
8 Jãnos Bolyai nasceu em 15 de dezembro de 1802 em Kolozsvár, Império Austríaco
(atualmente, Cluj, Romênia) e morreu em 27 de janeiro 1860 em Marosvásárhely, Império
Austríaco (atualmente, Tirgu-Mures, Romênia). Entre 1820 e 1823 Bolyai preparou um tratado
sobre um sistema completo de geometria não-euclidiana [7].
9 David Hilbert nasceu em 23 de janeiro de 1862 em Königsberg, Prussia (atualmente
Kaliningrad, Rússia) e morreu em 14 de fevereiro de 1943 em Göttingen, Alemanha. A publicação
de Hilbert em geometria foi um dos trabalhos com mais influência nesta área depois de Euclides.
Um estudo sistemático dos axiomas da geometria euclidiana levou Hilbert a propor 21 axiomas e
suas conseqüências. Ele fez contribuições em muitas áreas da matemática e física [7].
10 Arquimedes de Siracusa nasceu em 287 a.C. e morreu em 212 a. C. em Siracusa,
Sicília. A maior contribuição de Arquimedes foi em Geometira. Seu método antecipou o cálculo
integral 2.000 antes de Newton e Leibniz[7].
3
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Apresentar a Geometria Euclidiana de forma dedutiva
utilizando o sistema apresentado por Euclides ou Hilbert é mais
complicado. Aleksei Vasil’evich Pogorelov12, com o objetivo de tornar
o texto [6] mais simples dividiu os axiomas em seis grupos13:
I. Axiomas de incidência: Este grupo é constituído de quatro axiomas,
sendo dois relacionados ao plano e dois relacionados ao espaço.
II. Axiomas de ordem: Este grupo é constituído de três axiomas, sendo
dois relacionados ao plano e um relacionado ao espaço.
III. Axiomas de medidas: Este grupo é constituído de doze axiomas,
sendo dois relacionados a segmentos, dois relacionados a ângulos,
quatro relacionados a áreas e quatro relacionados a volumes.
IV. Axioma de existência de um segmento de comprimento dado: Este
axioma e garante a construção de segmentos a partir de um número
real dado.
V. Axioma de Congruência: Este axioma garante a congruência de
triângulos e permite obter áreas e volumes de figuras congruentes.
VI. Axioma das paralelas: Por último temos o axioma que caracteriza a
geometria euclidiana.
Se, por um lado, Pogorelov não apresenta o grupo “axiomas
de continuidade”, ele acrescenta mais dois grupos relacionados a
medidas que de certa forma garantem a validade deste grupo. Nestas
notas, utilizaremos uma versão simplificada de Pogorelov que possui a
vantagem adicional de poder ser utilizada no ensino básico da
geometria. Faremos algumas adaptações, entre elas estão:
Para o estudo de áreas e volumes acrescentamos o axioma
do completamento.
Acrescentamos ao grupo de medidas axiomas
relacionados a área e volumes.
11 Julius Wihelm Richard Dedekind nasceu em 06/10/1831 e morreu em 12/02/1916 em
Braunschweig, atual Alemanha. A maior contribuição de Dedekind foi a definição de números
irracionais em termos de cortes. Ele introduziu a noção de ideal que é fundamental para a teoria
de anéis[7].
12 Aleksei Vasil’evich Pogorelov nasceu em 3 de março de 1919 na Rússia e morreu em
2002. Sua área de pesquisa é caracterizada por uma rara combinação de talento para a a
matemática e engenharia. É autor de mais de 200 publicações incluindo 40 monografias e livrotextos [8].
13 Estes grupos foram apresentados separadamente para o plano (estudo que chamou
de planimetria) e o espaço (estudo que chamou de estereometria).
4
1. Introdução
No decorrer do texto faremos a construção das principais
figuras geométricas planas e espaciais sem, no entanto, fazer o
estudo da construção com régua e compasso.
Apesar de fazermos este estudo através da apresentação
axiomática, não nos preocuparemos com as questões relacionadas a
consistência, independência e completude dos axiomas apresentados.
Esta análise está fora do escopo deste livro e pode ser vista nos livros
de Hilbert [3] e Pogorelov [6].
Nosso estudo será formado por
Noções primitivas: são os conceitos aceitos sem definição.
Axiomas: são os resultados aceitos sem demonstração.
Definições: são os conceitos apresentados para simplificar
a linguagem matemática ou para identificar um novo
objeto matemático.
Teoremas: são os resultados que são demonstrados a
partir de uma cadeia dedutiva de afirmações.
Proposições: são o mesmo que os teoremas mas que no
sistema como um todo não apresenta tanta importância
quanto o teorema.
Lemas: são pequenos resultados que também devem ser
demonstrados e que simplificam a demonstração de um
teorema.
Corolários: são conseqüências imediatas de um teorema e
que merece ser evidenciado.
Cada uma dessas noções ficará clara no decorrer do estudo.
As primeiras noções primitivas que adotaremos são as
seguintes:
Noção Primitiva 1: Ponto.
Noção Primitiva 2: Reta.
Noção Primitiva 3: Plano14.
14 Das noções primitivas temos um conhecimento intuitivo pela experiência,
sensibilidade e observação. Por exemplo, a marca de um toque de grafite num papel, dá a idéia
da noção não definida de ponto, apesar que isso é uma representação de ponto, pois ponto não
tem dimensão, e a marca no papel tem. É interessante observarmos que Euclides no Livro I de
“Elementos” definiu de maneira equivocada estas três noções, por exemplo, ele escreve que
“ponto é aquilo que não tem partes” e deixa sem significado o termo “ter partes”.
5
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Estas noções primitivas nos dizem quem serão os objetos
básicos da geometria euclidiana. Desta forma, a geometria euclidiana
estudará as relações entre esses três objetos.
As notações que utilizaremos para pontos, retas e planos
serão as seguintes:
Pontos: Letras latinas maiúsculas: A, B, C, X, Y,...
Retas: Letras latinas minúsculas: a, b, c, x, y,...
Planos: As seguintes letras gregas maiúsculas15: , , , , , , , .
Nos capítulos de 2 a 9 trabalharemos somente num plano
fixado e, portanto, não haverá necessidade da notação de plano. Esta
necessidade somente ocorrerá a partir do Capítulo 10.
As notações gráficas que utilizaremos para pontos, retas e
planos serão as seguintes:
Ponto:
Reta:
Plano:
É importante observarmos que estas notações gráficas são
apenas uma maneira de fixar as idéias com relação a cada um dos
objetos trabalhados e que isto, de forma alguma, representa os
objetos da teoria apresentada. Em todo o texto serão apresentados
desenhos que servirão para fixar as idéias no desenvolvimento de
determinado conceito ou resultado. Por outro lado, devemos
esclarecer que são apenas ilustrativos e não podem servir para
justificar qualquer uma das propriedades geométricas.
No texto falaremos de figuras geométricas (planas ou
espaciais), ou simplesmente, figuras planas ou figuras espaciais, que
são subconjuntos do plano ou do espaço e estaremos apresentando
uma classificação das principais figuras.
15 O alfabeto grego maiúsculo é dado por: (alfa), (beta), (gama), (delta),
(epsílon ou epsilo), (zeta ou dzeta), (eta), (teta), (iota), (capa), (lambda), (mi ou
mu), (ni), (xi), (ômicron), (pi), (rô), (sigma), (tau), (upsilon), (fi), (chi), (psi)
e. (ômega).
6
1. Introdução
7
Capítulo 2: Incidência e Ordem no Plano
Neste capítulo apresentaremos axiomas de incidência e ordem
no plano. Os axiomas de incidência estabelecem as relações mútuas
entre ponto e reta e os axiomas de ordem estabelecem uma
ordenação dos pontos na reta e no plano.
2.1. Axiomas de Incidência
Neste primeiro grupo estudaremos a incidência entre pontos e
retas que terá o mesmo significado de interceptar, passar por, estar
sobre. Começaremos pelo axioma de existência.
Axioma I.1: (de existência)
a) Existe ponto.
b) Existe reta e qualquer que seja a reta, existem pontos que
pertencem à reta e pontos que não pertencem à reta.
O mais interessante deste axioma é que ele nos garante a
existência dos objetos básicos, ou seja, a geometria não constitui-se
de um conjunto vazio e, portanto, fará sentido o estudo da relação
entre esses objetos.
Axioma I.2: (de determinação): Dados dois pontos distintos existe
uma única reta que contém estes pontos.
Observações:
1. Como dois pontos determinam uma reta, quando falarmos de uma
reta que passa por dois pontos distintos A e B, a denotaremos por rAB.
2. Este axioma constitui um bom teste de qualidade das réguas que
utilizamos, ou seja, se você conseguir desenhar duas retas distintas
2. Incidência e Ordem no Plano
passando por dois pontos distintos significa que esta régua não é
adequada para esta geometria.
3. Dada uma reta r, que existe pelo Axioma I.1.b, tomamos um ponto P
qualquer fora de r e um ponto Q em r, que existem pelo mesmo
axioma; unindo P com Q, teremos uma nova reta s que é
univocamente determinada pelos pontos P e Q de acordo com o
Axioma I.2a. O ponto Q na reta r, é o que chamaremos de interseção
de r e s, cuja notação será r s. Fazendo um abuso de notação,
escreveremos r s = Q ao invés de r s = {Q}. Isto será feito com o
objetivo de simplificá-la.
4. Quando duas retas possuírem um ponto
de interseção, diremos que as duas retas se
inter-ceptam. Como estamos estudando
geome-tria,
vamos
visualizar
geometricamente
o
con-teúdo
das
observações 3 e 4. No desenho ao lado temos
as retas r e s se interceptando no ponto Q e o
ponto P não pertencente a reta r.
r
P
Q
s
Definição 2.1: Se três (ou mais) pontos estão sobre uma mesma reta,
diremos que eles são colineares.
Exemplo
F
r
2.1. No desenho ao lado, os pontos A, B e C
C
são colineares pertencendo a reta r, os
pontos D, E e F são não colineares, onde D
B
e E pertencem a reta s, D e F pertencem a
A
reta t, e E e F pertencem a reta q.
E
q
D
s
t
Proposição 2.2: Dadas duas retas distintas, elas possuem no máximo
um ponto de intersecção.
Demonstração: Se a interseção de duas retas contiver pelo menos
dois pontos distintos, então pelo Axioma I.2 as retas não podem ser
distintas, o que é uma contradição. Logo, as duas retas se interceptam
no máximo em um ponto.
9
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Vejamos agora a quarta noção primitiva da geometria
euclidiana que permitirá apresentar a noção de segmento de reta.
Noção Primitiva 4: Um ponto C estar entre
dois pontos A e B de uma reta r, onde A, B
e C são distintos.
Observemos que dizer “C está entre
A e B” é o mesmo que dizer “C está entre B
e A”. No desenho ao lado, os pontos A, B e
C pertencem a reta r e o ponto C está entre A
e B.
B
r
C
A
Definição 2.3: Sejam A e B dois pontos de uma reta r. O conjunto
constituído pelos dois pontos A e B e pelos pontos que estão entre A
e B é chamado de segmento de reta, cuja notação será AB. Os pontos
que estão entre A e B são chamados pontos interiores, ou
simplesmente pontos do segmento AB; os pontos A e B, são
denominados extremos do segmento AB. A reta r é denominada reta
suporte do segmento AB e será denotada por rAB.16
Exemplos
2.2. No desenho ao lado indicamos o segmento AB, o interior do segmento AB e os
extremos A e B na reta suporte r. Observemos que o segmento AB é formado
pela união dos pontos extremos com os
pontos interiores.
Extremos
B
r
Interiores
A
Segmento AB
16 Não há diferença entre o segmento AB e o segmento BA. Existirá a diferença
quando temos um segmento orientado. A notação é a mesma da reta que passa por dois pontos
e é razoável que seja assim pois existe uma única reta suporte do segmento e que contém os
extremos do segmento.
10
2. Incidência e Ordem no Plano
2.3. A noção de segmento permitirá a
r
construção de várias figuras planas
B
conheci-das. Com os conceitos e resultados
C
que temos já podemos construir os
triângulos, que são figuras formadas por
s
três pontos não colineares A, B e C e pelos
segmentos de reta determinados por estes
três pontos. No desenho ao lado, temos
A
um triângulo construído sobre as retas r, s
t
et
que, duas a duas, se interceptam nos pontos A, B e C, formando os
segmentos AB, AC e BC. Os pontos A, B e C são chamados vértices do
triângulo e os três segmentos de lados do triângulo. Denotaremos
esse triângulo por ABC. Um triângulo é bem determinado pelos seus
três pontos pois os segmentos são bem determinados por dois
pontos.
Até o momento apresentamos quatro classes17 de figuras geométricas planas:
pontos
retas
pontos, retas, segmentos e triângulos. No
diagrama ao lado visualizamos estas
classes que, conforme se observa, são
segmentos
disjuntas, ou seja, um ponto não pertence a
triângulos
classe dos segmentos, um segmento não
Figuras
pertence a classe dos triângulos, etc.
O diagrama apresentado não se preocupa com questões
relativas ao tamanho de cada classe mas sim com a questão de
conjunto propriamente dita, ou seja, consideramos o conjunto de
todas as figuras planas e vamos visualizar este conjunto que está
particionado em classes que poderão ser disjuntas ou não.
17
O sentido que estamos dando para a classe é o usual, ou seja, um conjunto de
objetos que possuem uma propriedade em comum.
11
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
2.2. Axiomas de Ordem
O próximo grupo estabelecerá as relações mútuas entre os
pontos numa reta e no plano e pertencem ao segundo grupo de
axiomas denominado axiomas de ordem.
Axioma II.1: Dados três pontos colineares, um e apenas um deles
localiza-se entre os outros dois.
Axioma II.2: Dados dois pontos A e B
numa reta, sempre existem um ponto C
entre A e B e um ponto D, tal que A está
entre D e B.
D
A
C
B
Definição 2.4: Seja r uma reta e fixemos um ponto O em r. Consideremos
os pontos A e B em r, distintos de O. Se A = B, diremos que A e B estão
do mesmo lado em relação ao ponto O. Caso contrário, pelo Axioma II.1,
O está entre A e B, ou não. Se O não está entre A e B diremos que A e
B estão no mesmo lado em relação ao ponto O. Se O está entre A e B,
diremos que A e B estão em lados diferentes em relação ao ponto O.
Exemplos
2.4. No desenho ao lado temos as seis
possibilidades que podem ocorrer com
C B
C A
B
A
três pontos sobre uma reta dada.
Deixamos subentendida uma ordem que
A
será vista na próxima seção. De fato, até o B C A C
B
momento não há diferença entre o
primeiro e o sexto caso, segundo e quarto A A B B C C
caso, terceiro e quinto caso.
2.5. Nos desenhos ao lado ilustramos
A
O
O
A= B B
todas as possíveis situações entre dois
pontos em relação a um ponto O. No
A
B
A
B
desenho onde A e B estão do mesmo lado, O
O
O
B
A
observemos que ainda não sabemos a
A e B estão do mesmo lado em
diferença entre o segundo e o quarto
relação a O
caso. Da mesma forma com o terceiro e
12
2. Incidência e Ordem no Plano
quarto caso. Isto também se nota quando
A e B estão em lados diferentes em
relação a O. Na realidade, está faltando
estabelecer uma ordem nesta reta pois é a
ordem que permitirá diferenciar estes
casos. O mesmo ocorre com o segundo
desenho.
B
A
O
O
A
B
A e B estão em lados
diferentes em relação a O
A relação entre os pontos, dada pelo ponto O, nos permite
particionar a reta:
Teorema 2.5: Um ponto numa reta fornece uma partição18 da mesma.
Demonstração: Dado uma reta r e um ponto O pertencente a r, escolhamos um um
ponto arbitrário A em r distinto de O, que
existe pelo item b) do Axioma I.1. Vamos
denotar por S o conjunto de todos os pontos que se encontram do mesmo lado que
A em relação a O, e por S’ o conjunto de
todos os pontos que se encontram em lados
diferen-
r
A
S
O
S’
tes de A em relação a O. Considere a família de conjuntos ={S, S’,{O}}.
Vamos mostrar que é uma partição de r, ou seja:
1.
S e S’ ;
2. S {O} = , S’ {O} = e S S’ = ;
3. S S’ {O} = r.
De fato, vamos demonstrar cada um dos itens de 1 a 3:
1. Pela Definição 2.4, temos que o ponto A está do mesmo lado que A
em relação ao ponto O. Logo, A S e, então, S . Para
demonstrar a segunda parte temos, pelo Axioma II.2, que existe
um ponto D tal que O está entre A e D. Logo, pela Definição 2.4, D
S’ e, então, S’ .
18 Dado um conjunto A, dizemos que uma família de conjuntos é uma partição do
conjunto A se todos os elementos de são subconjuntos não vazios de A, quaisquer dois
elementos de são disjuntos e a união de todos os elementos de fornece o conjunto A.
13
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
2. Pela Definição 2.4, temos que qualquer ponto de S ou S’ é
diferente do ponto O. Logo, S {O} = e S’ {O} = . Para
demonstrar a terceira parte, seja B S S’, ou seja, B está do
mesmo lado que A em relação a O e B está em lado diferente de A
em relação a O, o que pela Definição 2.4 contradiz o Axioma II.1.
3. É claro que S S’ {O} r. Para mostrar que r S S’ {O}
considere um ponto B r diferente do ponto O. Se B = A então B S,
pela Definição 2.4. Se B A, pelo Axioma II.1 temos B entre O e A,
ou A entre O e B, ou O entre A e B. Nos primeiro e segundo casos
temos, pela Definição 2.4, temos B S. No terceiro caso, também
pela Definição 2.4 temos B S’. Logo, r S S’ {O} e, portanto
r = S S’ {O}.
Este teorema garante a existência de uma relação de
equivalência em r. Deixamos como exercício a demonstração desta
afirmação (Exercício 2.6).
Definição 2.6: O conjunto S da demonstração do Teorema 2.5,
juntamente com o ponto O é chamado semi-reta. Analogamente, o
conjunto S’ unido com {O} também é chamado semi-reta. O ponto O,
é chamado origem da semi-reta.
Se um ponto A S, vamos denotar
a semi-reta que contém A por SOA.
Analogamente, se um ponto A’ S’, a
notação da semi-reta que contém A’ será
SOA’. Geometricamente, a semi-reta SOA
será representada como no desenho ao
lado. Dizemos que SOA’ é a semi-reta oposta
a SOA e vice-versa.
A
O
Proposição 2.7: Se B está entre A e C, e C está entre B e D, então B e C
estão entre A e D.
14
2. Incidência e Ordem no Plano
Demonstração: Consideremos as semi-retas SBA e SBC. Como B está
entre A e C, temos
SBA SBC = r e SBA SBC = B.
A
É claro que A SBA e C SBC. Se D SBA
B
então, pela Definição 2.4 e Definição 2.6,
C
temos que B está entre C e D, o que é uma
D
contradição. Logo, D SBC e, portanto, B
está entre A e D. Consideremos, agora as
B
semi-retas SCD e SCB. Como C está entre B e
C
D, temos SCD SCB = r e SCD SCB = C.
É claro que D SCD e B SCB. Se A SCD
A
D
então, pela Definição 2.6 e Definição 2.4,
temos que C está entre A e B, o que é uma
contradição. Logo, A SCB e, portanto, C
está entre A e D.
Concluímos até agora que o ponto O, determina exatamente
duas semi-retas distintas, cuja interseção é o ponto O. A seguir, vamos
dividir os pontos de um plano também em duas classes. Para isso
necessitamos da seguinte definição:
Definição 2.8: Consideremos uma reta r e dois pontos A e B que não
pertencem a esta reta. Se A = B, diremos que A e B estão em um
mesmo lado em relação a reta r. Se A B, temos duas possibilidades,
o segmento AB intercepta ou não a reta r. Se intercepta, diremos que
A e B estão em lados contrários em relação a reta r, se não
intercepta, A e B estão em um mesmo lado em relação a reta r.
15
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Exemplos
2.6. No desenho ao lado temos que os
pontos C e D estão em lados contrários em
relação a reta r e os pontos A e B estão do
mesmo lado em relação a reta r. Por outro s
lado, C e D estão do mesmo lado em
relação a reta s e os pontos A e B estão em
r
lados contrários em relação a reta s.
C
D
B
A
Teorema 2.9: Uma reta fornece uma partição do plano.
Demonstração: Seja r uma reta do plano, a demonstração deste
teorema é análoga a do Teorema 2.5. Neste caso, tomamos um ponto
A não pertencente a r, que existe pelo Axioma I.1.b. Denotamos por
o conjunto de todos os pontos que se encontram do mesmo lado que
A em relação a r, e por ’ o conjunto de todos os pontos que se
encontram em lados diferentes de A em relação a reta r. Considere a
família = { , ’ ,r}. Devemos mostrar que
1. e ’ ;
2. r = , ’ r = e ’ = ;
3. ’ r é igual ao plano.
De fato, vamos demonstrar cada um dos itens de 1 a 3.
1. Pela Definição 2.8, temos que o ponto A está do mesmo lado que A
em relação a reta r, e assim, A , donde . Para a segunda
parte, tomamos um ponto O qualquer em r (que existe pelo do
Axioma I.2.b); os pontos O e A, fornece uma reta s pelo Axioma I.2.a,
cuja interseção com r é o ponto O. Pelo Axioma II.2, existe um ponto B
em s, tal que O está entre A e B. Assim O pertence ao segmento AB e
pela Definição 2.8, A e B estão em lados diferentes em relação a reta r.
Logo B ’, donde ’ ;
2. Pela Definição 2.8, temos que qualquer ponto de ou de ’ não
está em r. Assim, r = e ’ r = . Para mostrar que a terceira
interseção é vazia, observamos que se B ’, então B está do
mesmo lado que A em relação a r e B está em lado diferente em
relação a r, assim, pela Definição 2.8, temos uma contradição;
16
2. Incidência e Ordem no Plano
3. É claro que ’ r está contido no plano. Vamos mostrar que
todos os pontos do plano estão contidos em ’ r. Seja B um
ponto qualquer do plano, se B r, temos o desejado. Se B r, podemos
ter B = A, neste caso pela Definição 2.8, B , e novamente teremos o
resultado. Se B A, consideremos a reta s = rAB. Pela Proposição 2.2, r e s
tem no máximo um ponto de interseção. Se r s é o conjunto vazio,
então o segmento AB não intercepta r e assim, pela Definição 2.8, B
está do mesmo lado que A em relação a r, ou seja, B . Se r s = {O},
então pelo Axioma II.1, ou O está entre A e B, ou não. No primeiro
caso, B ’ e no segundo caso, B . Assim, esgotamos todas as
possibilidades, e em todas elas, temos B r, ou B ou B ’, donde
segue o resultado.
Este teorema garante a existência de uma relação de
equivalência no plano. Deixamos como exercício a demonstração
desta afirmação (Exercício 2.7).
Definição 2.10: Sejam r uma reta e A um
ponto que não pertence a r. O conjunto
da demonstração do Teorema 2.9,
juntamente com r é chamado de semiplano
determinado por r contendo A, e será
representado por r,A.
Exemplos
2.7. Uma reta r divide o plano em dois
semiplanos distintos, a saber: os semiplanos r,A e r,B, cuja interseção é a reta r.
Aqui, o ponto B está do lado contrário de
A em relação a reta r. No desenho ao lado,
visualizamos estes dois semiplanos.
17
r,B
B
A
r
r,A
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
2.8. Com estes resultados podemos
construir os quadriláteros, que são figuras
formadas por quatro pontos A, B, C e D
(três a três não colineares) e pelos
segmentos de reta AB, BC, CD e DA tais que
os segmentos podem se interceptar
somente em seus extremos. Os pontos A, A
B, C e D são chamados vértices do quadrilátero e os quatro
segmentos são chamados de lados do B
quadrilátero. Denotaremos o quadrilátero
por ABCD. Para construir um quadrilátero,
considere uma reta r e pontos A, B e C tais
que A, C r e B r. A existência destes
pontos está garantida pelo Axioma I.1.b.
B
C
D
r
C
E
A
D
rBE
Considere um ponto E r, que podemos supor entre A e C. Na reta rBE
considere a semi-reta oposta SEB e um ponto D pertencente a ela.
Afirmamos que os pontos A, B, C e D junto com os segmentos AB, BC,
CD e DA formam um quadrilátero. De fato, temos que os pares de
segmentos AB e BC, BC e CD, CD e DA, DA e AB se interceptam
somente em um dos extremos, pois caso contrário eles seriam iguais
pela Proposição 2.2. Resta mostrar que os pares de segmentos AB e
CD, AD e BC não se interceptam. Temos que os segmentos AB e BC
estão no semiplano r,B, CD e AD estão no semiplano r,D. Logo, AB e
CD estão em semiplanos opostos determinado por r. Como A, C r e
são distintos temos que AB e CD não se interceptam. Deixamos como
exercício a verificação de que AD e BC não se interceptam (Exercício
2.10).
2.9. Dados quatro pontos três a três não colineares, sempre é possível
18
2. Incidência e Ordem no Plano
construir um quadrilátero. De fato, sejam
A, B, C e D estes pontos e escolhamos dois
pontos quaisquer, digamos A e B. Temos
duas opções:
rAB
D
A
1. C e D estão em semiplanos opostos
determinados por rAB: Neste caso, basta
considerar os segmentos AC, CB, BD e DA.
B
C
rAB
C
B
2. C e D estão no mesmo semiplano
determinado por rAB: Neste caso,
escolhamos um dos pontos A ou B e um
dos pontos C e D, digamos A e C. Temos
duas opções:
a) B e D estão no mesmo semiplano
determinado por AC: Neste caso, basta
considerar os segmentos AC, CD, DB e BA.
D
A
C
D
A
rAC
b) B e D estão em semiplanos opostos
determinados por rAC: Neste caso, basta
considerar os segmentos AB, BC, CD e DA.
B rAB
C
D
B
A rAB
rAC
Com estes resultados o diagrama apresentado anteriormente
passa a ter a visualização no diagrama abaixo. Observamos que agora
temos sete classes distintas de figuras planas, todas disjuntas: pontos,
retas, segmentos, semi-retas, triângulos, semiplanos e quadriláteros.
19
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
retas
pontos
segmentos
semi-retas
triângulos
semiplanos
quadriláteros
Figuras
2.3. Ordenando uma Reta
Nosso objetivo agora será utilizar os axiomas anteriores para
construir uma relação de ordem sobre uma reta.
Definição 2.11: Seja r uma reta arbitrária e O
um ponto sobre r. Consideremos uma das
duas semi-retas que tem origem comum
em O. Diremos que um ponto A desta
semi-reta precede um ponto B, se A está
entre O e B.
Chamando uma das duas semi-retas com
origem O de primeira semi-reta ou semireta negativa e a outra de segunda semireta ou semi-reta positiva, podemos
definir uma relação na reta r toda,
estabelecendo as seguintes condições:
1.
r
B
A
O
Dr
C
O
B
A
a
et
i-r iva
m
Se egat
n
ta
-re
mi it iva
e
S os
p
Sejam A e B dois pontos da semi-reta negativa. Então, na reta r, A
é menor do que B se B precede A.
20
2. Incidência e Ordem no Plano
2. Todos os pontos da semi-reta negativa são, na reta r, menores do
que o ponto O.
3. Todos os pontos da semi-reta negativa são, na reta r, menores do
que todos os pontos da semi-reta positiva.
4. O ponto O, na reta r, é menor do que todos os pontos da semireta positiva.
5. Sejam C e D dois pontos da semi-reta positiva. Então, na reta r, C é
menor do que D se C precede D.
Notação: Se A é menor do que B, escreveremos “A < B” e se A é
menor do que ou igual a B, escreveremos “A B”.
Proposição 2.12: A relação “menor do que ou igual a” () é uma
relação de ordem total na reta. A relação “menor do que” (<) é uma
relação de ordem estrita na reta19.
Demonstração: Demonstraremos a primeira parte e deixaremos
como exercício a demonstração da segunda parte (Exercício 2.11).
Devemos mostrar que esta relação é reflexiva, anti-simétrica, transitiva,
e que dados quaisquer dois pontos A e B em r, ou A B, ou B A.
i) Reflexiva: A A, pois A = A.
ii) Anti-simétrica: Sejam A e B pontos da reta tais que A B e B A.
Suponhamos que A e B estejam na semi-reta negativa e que sejam
distintos. Temos A < B e, por (1), B precede A na semi-reta negativa, ou
seja, B está entre O e A. Mas também temos que B < A e, por (1), A
precede B na semi-reta negativa, ou seja, A está entre O e B, o que é
uma contradição, pelo Axioma II.1. Analogamente, obtemos os outros
casos.
iii) Transitiva: Sejam A, B e C pontos de uma reta tais que A B e B C.
Podemos supor que os pontos sejam dois a dois distintos pois, caso
contrário, o resultado é imediato. Suponhamos que A, B e C estejam na
semi-reta positiva. Existem seis possibilidades para A, B e C na semireta
19
Uma relação R num conjunto A é denominada relação de ordem se satisfizer as
propriedades reflexiva (P(x): (x A)(x R x), anti-simétrica (P(x,y): (x,y A)(x R y e y R x x =
y) e transitiva (P(x,y,z): (x,y,z A)(x R y e y R z x R z). Se além disto tivermos (x,y) R ou
(y,x) R para quaisquer x, y A a ordem será total. Para ser uma ordem estrita a relação deverá
satisfazer a propriedade transitiva e a propriedade P(x): (x A)(x R/ x), denominada irreflexiva.
21
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
positiva, como mostra o desenho ao lado.
B
O
A
C
Como A < B e B < C, por hipótese, só nos
C
O
A
B
resta a primeira possibilidade que nos
fornece B entre A e C. Além disso, temos A
A
O
B
C
entre O e B. Logo, pela Proposição 2.7
C
O
B
A
temos A entre O e C. Portanto, A C. O
A
O
C
B
caso em que A, B e C estão na semi-reta
negativa é análogo. Suponhamos agora que
B
O
C
A
o ponto A
esteja na semi-reta negativa e o ponto C esteja na semi-reta positiva.
Neste caso, o resultado é imediato pela Definição 2.11. Se o ponto A
está na semi-reta positiva e o ponto C está na semi-reta negativa
temos que o ponto B está na semi-reta positiva pois A < B. Logo, C < B,
o que contradiz a hipótese. Em todos os casos concluimos que A < C e,
portanto A C.
iv) Dados dois pontos A e B quaisquer em r, é imediato das cinco
condições que A é menor do que ou igual a B ou B é menor do que ou
igual a A.
Diante do exposto acima vemos o porquê dos Axiomas II.1 e
II.2 serem classificados nos grupos dos axiomas de ordem, pois por
meio deles ordenamos todos os pontos de uma reta.
Teorema 2.13: Entre dois pontos quaisquer de uma reta, existem
infinitos pontos desta.
Demonstração: Suponhamos que entre dois pontos A e B de uma
reta existam n pontos distintos, digamos { P1, P2, ,Pn }. Com a relação
de ordem “” podemos considerar P1 < P2 < < Pn, a menos de uma
reordenação de índices. Como P1 P2, pelo Axioma II.2, existe um
ponto P tal que P1 < P < P2. Assim, P é distinto P3, ,Pn, o que é
absurdo, pois entre os dois pontos supusemos existir exatamente n
pontos. Portanto, existem infinitos pontos entre dois pontos
quaisquer de uma reta.
22
2. Incidência e Ordem no Plano
Corolário 2.14: Existem infinitos pontos numa reta.
Demonstração: Imediata, pois todo conjunto que contém um
conjunto infinito é infinito.
2.4. Polígonos
Estudamos nas seções anteriores as defnições e construções
de triângulos e quadriláteros. Nesta seção vamos definir uma classe
de figuras denominada polígonos que inclui os triângulos e
quadriláteros.
Definição 2.15: Dois segmentos são ditos
A5
consecutivos se possuirem exatamente um
A2
extremo em comum. Dado n IN, n 3,
uma n-poligonal é uma figura formada por A1
A3
uma seqüência de n pontos A1, A2, ..., An e
pelos segmentos consecutivos A1A2, A2A3,
A4
A3A4, A5A6,...,An-1An. Os pontos são chamados
An-1
A6
verti-ces da poligonal e os segmentos são A
n
chamados lados da poligonal. Denotaremos a n-poligonal por A1A2...An.
Estamos interessados em poligonais com certas propriedades:
Definição 2.16: Uma n-poligonal A1A2...An é denominada polígono de n
lados ou n-ágono, se as seguintes condições são satisfeitas:
a) A1 = An;
b) Os pontos A1, A2, ..., An-1 são dois a dois distintos;
c) Os lados não consecutivos não se interceptam;
d) Dois lados consecutivos não são colineares.
Os segmentos AiAi+1 (i=1,,n–2) e An-1A1 são denominados lados, os
pontos A1, A2, ...An-1 são denominados vértices. Os segmentos
determinados pelos vértices que não são lados do polígono são
chamados diagonais do polígono.
23
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Observe que todo polígono é uma poligonal mas nem toda
poligonal é um polígono.
Exemplos
2.10. Os desenhos a seguir ilustram alguns polígonos. O polígono (1) é
um quadrilátero, o polígono (2) é um 5-ágono, os polígonos (3) e (5)
são 8-ágonos, o polígono (4) é um triângulo, o polígono (6) é um 6(2)
(3)
(1)
ágono.
(1)
(2)
(3)
(4)
(5)
(6)
2.11. Os desenhos a seguir não representam polígonos. O desenho (1),
apesar de satisfazer os itens b), c) e d), não satisfaz o item a). O
(5)
(6)
desenho (2)(4)
não satisfaz
o item
c). O desenho (3) não satisfaz os itens
a) e b). O desenho (4) não satisfaz os itens b), c) e d). O desenho (5)
não satisfaz os iten b), c) e d).20
(2)
(1)
(2)
(1)
(4)
(3)
(5)
2.12. O desenho ao lado ilustra um polígono
apesar de termos dois lados contidos numa
mesma reta. (3)O que(4)ocorre (5)é que estes
lados não possuem extremos em comum.
2.13. Os polígonos recebem nomes especiais para alguns valores de n.
Veja na tabela a seguir alguns deles:
Número de lados
Nome do polígono
3
triângulo
20 Observamos a diferença entre os desenhos (2) e (4), enquanto em (2) ocorre a
interseção de dois segmentos, em (4) temos quatro segmentos com um vértice em comum. Os
desenhos que serão feitos a partir de agora não apresentarão mais os pontos de forma explícita
e ficará subentendido os vértices.
24
2. Incidência e Ordem no Plano
4
5
6
7
8
9
10
12
15
quadrilátero
pentágono
hexágono
heptágono
octógono
nonágono
decágono
dodecágono
pentadecágono
Para encerrar este capítulo apresentamos um diagrama das
principais figuras geométricas obtidas até o momento. Dentro da
classe dos polígonos estão aqueles mencionados no exemplo anterior
e as poligonais são uma classe não apresentada no desenho mas que
contém a classe dos polígonos.
2.5. Exercícios
2.1. Pela Proposição 2.2 duas retas distintas possuem no máximo um
ponto em comum, o que podemos dizer de um conjunto de três retas
distintas do plano? E um conjunto de quatro retas distintas do plano? E
um conjunto de 5 retas distintas do plano? Obtenha um resultado para
o caso de n retas distintas, justificando sua resposta.
25
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
2.2. Mostre que três pontos não colineares determinam três retas.
Quantas retas são determinadas por quatro pontos, sendo que
quaisquer três deles são não colineares? E para o caso de 6 pontos?
Generalize para o caso de n pontos.
2.3. Sejam P = {a,b,c}, r1 = {a,b}, r2 = {a,c} e r3 = {b,c}. Chame P de plano
e, r1 , r2 e r3 de retas. Mostre que nessa “geometria” vale o Axioma I.2.
Idem para o plano P = {1,2,3,4,5,6,7,8,9} e as retas como r1 ={1,2,3}, r2 =
{4,5,6}, r3 = {7,8,9}, r4 = {1,4,7}, r5 = {2,5,8}, r6 = {3,6,9}, r7 = {1,5,9}, r8
= {2,6,7}, r9 = {3,4,8}, r10 = {3,5,7}, r11 = {2,4,9} e r12 = {1,6,8}.
2.4. O desenho ao lado representa um
“plano”, o símbolo representa um
“ponto” e as linhas unindo os pontos
representam uma “reta”. Observe que há
7 “retas” e 7 “pontos” no desenho.
Verifique se neste modelo de geometria
valem os axiomas de existência e de
determinação.
2.5. Com base nos exercícios anteriores mostre que não existe
exemplo de uma geometria com exatamente seis pontos, em que
sejam válidos o Axioma I.1 e o Axioma I.2 e na qual, todas as retas
tenham exatamente 3 pontos.
2.6. Seja r uma reta qualquer e O um ponto de r. Mostre que a relação
“estar do mesmo lado em relação ao ponto O” é uma relação de
equiva-lência em r.
2.7. Seja r uma reta qualquer. Mostre que a relação “estar do mesmo
lado em relação à reta r” é uma relação de equivalência no plano.
2.8. Mostre que, se uma reta intercepta um lado de um triângulo e não
passa por nenhum de seus vértices, então ela intercepta também um
dos outros dois lados.21
21
Este resultado é também conhecido como Axioma de Pasch devido ao matemático
Moritz Pasch que nasceu 8/11/1843 em Breslau na Alemanha (atualmente, Wroclaw na Polônia) e
26
2. Incidência e Ordem no Plano
2.9. Mostre que se C está entre A e D e B está entre A e C, então B se
encontra entre A e D, e C se encontra entre B e D.
2.10. No Exemplo 2.8 (construção do quadrilátero), verifique que AD e
BC não se interceptam.
2.11. Complete a demonstração da Proposição 2.12.
2.12. Considere a seguinte construção de quadrilátero:
Para construir o quadrilátero, considere uma reta r e os pontos A, D e E
tais que A, D r e E r. A existência está garantida pelo Axioma I.1.b.
Construa o triângulo ADE. Utilizando o Axioma II.2, considere um ponto
B entre A e E e um ponto C entre D e E. O quadrilátero é dado pelos
pontos A, B, C, D e pelos segmentos AB, BC, CD e DA.
a) Mostre que esta construção nos fornece um quadrilátero.
b) Qualquer quadrilátero pode ser construído desta forma? Justifique
sua resposta.
2.13. Podem existir dois segmentos distintos que têm exatamente dois
pontos em comum ?
2.14. Utilizando semiplanos defina interior de um triângulo.
2.15. Demonstre que existem infinitas retas no plano.
2.16. Demonstre que por um ponto P passam infinitas retas.
2.17. Desenhe as diagonais de um quadrilátero, de um pentágono e de
um hexágono. Conte quantas diagonais têm cada um deles. Quantas
diagonais têm um polígono de n lados ?
morreu em 20/09/1930 em Bad Homburg, Alemanha. Pasch trabalhou nos fundamentos da
geometria e encontrou algumas hipóteses nos Elementos que ninguém havia notado antes. D.
Hilbert, em [3], admite este resultado como axioma e demonstra o Axioma II.2.
27
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
2.18. Um subconjunto do plano é dito convexo se o segmento ligando
quaisquer dois de seus pontos está totalmente contido nele.
a) Mostre que o próprio plano e qualquer semiplano são convexos.
b) Nos desenhos abaixo quais representam conjuntos convexos?
c) Mostre que a interseção de n conjuntos convexos é um conjunto
convexo.
d) Mostre que a interseção de n semiplanos é um conjunto convexo.
e) A união de dois conjuntos convexos é um conjunto convexo?
Mostre ou dê um contra-exemplo.
2.19. Mostre que um triângulo separa o plano em duas regiões, uma
convexa e a outra não.
2.20. Classifique como verdadeiro (V) ou falso (F) justificando sua
resposta.
a) Ponto é o que não tem dimensão.
b) Reta é o que tem uma única dimensão.
c) Dois pontos determinam uma reta.
d) Três pontos não colineares são distintos.
e) Duas retas que têm um ponto em comum são concorrentes.
28
Capítulo 3: Segmentos, Ângulos e Medidas
Medir um ente geométrico é antes de qualquer coisa comparálo com outro e foi através da comparação de áreas de terras que a
geometria iniciou. Neste capítulo, trabalharemos com o terceiro e
quarto grupos de axiomas. Intercalaremos os dois grupos por serem
recíprocos um do outro. Estes grupos fazem a conexão da geometria
com os números reais.
3.1. Medidas de Segmentos
O primeiro passo para esbelecer medidas de segmentos é garantir que podemos associar um número a um segmento. Isto é dado
pelo próximo axioma:
Axioma III.1: A todo segmento de reta corresponde um número maior
ou igual a zero. Este número é zero se, e somente se, os extremos do
segmento são coincidentes.
Ao introduzir este axioma, estamos supondo que podemos
fazer esta medida através de algum instrumento conhecido, por
exemplo, por meio de uma régua com escala e ao fazermos isto
estamos definindo uma unidade de medida.
Definição 3.1: O número a que se refere este axioma é chamado
comprimento do segmento, ou distância entre os pontos A e B,
extremos do segmento. Denotaremos o comprimento de um
segmento AB, por AB .
Axioma III.2: Se um ponto C está entre dois pontos A e B, então o
comprimento do segmento AB é igual a soma do comprimento do
segmento AC com o comprimento do segmento CB, ou seja,
AB AC CB.
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Estes dois axiomas fazem parte do grupo III dos axiomas de
medidas (estes são de medida de segmentos). Após definirmos
ângulos, daremos mais dois axiomas de medidas (de ângulos). Nos
Capítulos 6 e 16, necessitaremos dos axiomas de medidas de áreas e
volumes, respectivamente.
Uma das conseqüências do Axioma III.2 é saber a posição de
dois pontos através da medida dos segmentos formados com o ponto
O.
Proposição 3.2: Em uma semi-reta SOA, se
considerarmos o ponto B O tal que
OB OA, então o ponto B estará entre O e A.
A
B
Demonstração: A origem O certamente não
está entre A e B, pela própria definição de
semi-reta. Se o ponto A estivesse entre O e B,
O
pelo Axioma III.2, teríamos que OB OA AB
e
como AB tem comprimento maior ou igual a zero teríamos OB OA,
o que é um absurdo. Só resta a alternativa que B está entre O e A.
O axioma seguinte pode ser visto como o “recíproco” do
Axioma III.1. Mas ele é colocado num quarto grupo que é constituído
pelos axiomas de existência de um segmento de um dado
comprimento e ângulos de uma dada medida. Na verdade, este grupo
de axiomas introduz a noção de continuidade na geometria.
Axioma IV.1: Para qualquer número real d > 0, existe um segmento de
reta de comprimento d, que pode ser construído a partir da origem de
qualquer semi-reta dada.
Agora podemos estabelecer uma unidade de medida de
segmentos e construir um instrumento que servirá para comparar
comprimentos. Esta unidade é denominada metro internacional e é a
distância entre dois traços em uma certa barra de metal conservada
30
3. Segmentos, Ângulos e Medidas
no Bureau Internacional de Pesos e Medidas perto de Paris. (A barra
deve estar à temperatura do gelo fundente: 0ºC). Este é o segmento
cuja medida vale 1 metro.22
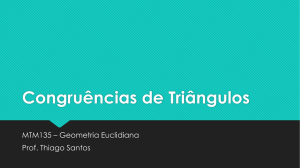
Para construir uma régua graduada, subdividimos o metro em
1000 partes iguais, fornecendo assim o milímetro. Cada 10 milímetros
nos dá 1 centímetro. A foto a seguir ilustra em tamanho natural parte
de uma régua graduada de 20 centímetros que corresponde a 200
milímetros, ou seja, 200 partes da divisão dada.
Exemplos
3.1. Consideremos três pontos A, B e C tais que B esteja entre A e C e
AB = 2. Não importa qual seja o valor de BC, o valor de AC é 2 + BC,
pelo Axioma III.2. Por exemplo, se BC = 5, teremos AC = 7.
22 Historicamente, em 1790, a Assembléia Constituinte da França, criou uma comissão
de cientistas, integrada por Lagrange, Laplace e Monge, entre outros, com o objetivo de analisar
e propor soluções para o problema de criar uma unidade de medida de comprimento. Como
conseqüência dos trabalhos dessa comissão, em 1795, criou-se uma lei que estabelecia o metro
como unidade padrão de comprimento e era definido como: "a décima milionésima parte do
quadrante de um meridiano terrestre". Para chegarem a essa relação, dois astrônomos
franceses, Méchain e Delambre, mediram o arco de meridiano entre as cidades de Dunquerque,
na França, e Barcelona, na Espanha, passando por Paris, sendo então construído um metro de
platina para ser utilizado como padrão.
31
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
3.2. Se considerarmos os números reais 4
e 6, pelo Axioma IV.1, existem segmentos
D
C
de reta de comprimento 4 e 6, que
B
podem ser construídos a partir de A
qualquer ponto da reta. No desenho ao
lado, vemos que o segmento AB possui
comprimento 1 cm, o segmento CD possui
comprimento 0,9 cm
e o segmento BC possui comprimento 1,5. Observamos que o
segmento AD possui comprimento 3,4.
O próximo teorema, que utiliza estes axiomas, permitirá
introduzir a noção de coordenada.
Teorema 3.3: Sejam r uma reta e IR o conjunto dos números reais.
Existe uma função x: r IR bijetora tal que, se x(A) e x(B) são as
imagens de dois pontos A e B, o comprimento do segmento AB será
igual a x(B) – x(A).
Demonstração: Seja O r um ponto qualquer, pelo Teorema 2.5 e
Definição 2.6, O divide r em duas semi-retas. Escolhamos uma para ser
a semi-reta negativa, denotando-a por SO–, e a outra para ser a semireta positiva, denotando-a por SO+. Definamos a relação
x = {(A,x(A))|Ar},
onde
se A O
0
x(A) OA se A SO
OA se A S .
O
Temos que x é uma função pois Dom x = r, pelo Axioma III.1. Além
disso, se A = B temos x(A) = x(B), pois OA = OB e então OA OB.
Temos também que x é bijetora. De fato, x é injetora pois
considerando A e B distintos, temos os seguintes casos:
1. A e B em SO–: OA OB – x(A) – x(B) x(A) x(B).
2. A e B em SO+: OA OB x(A) x(B).
3. A e B em semi-retas distintas: teremos x(A) e x(B) com sinais
distintos e portanto x(A) x(B).
32
3. Segmentos, Ângulos e Medidas
Quanto a sobrejetividade, seja d IR, pelo Axioma IV.1, existe um
segmento de reta de comprimento |d| construído a partir do ponto O.
Se d> 0, contruímos o segmento OD na semi-reta positiva SO+, se d<0,
construímos o segmento OD’ na semi-reta negativa SO– e se d = 0,
temos que x(O) = 0. Assim, x(D) = d se d > 0 e x(D’) = d se d < 0. Logo,
para qualquer d IR, sempre obtemos um ponto P em r tal que x(P) =
d, onde
D se d 0
P O se d 0
D' se d 0.
Para demonstrar a segunda parte, sejam A, B em r. Se A = B então
x(A) = x(B) e, assim, AB = 0 = |x(B) – x(A)|. Se A B temos os seguintes casos:
1. A entre O e B na semi-reta positiva:
B
O
A
1
OB OA AB AB OB OA = x(B) – x(A).
2. B entre O e A na semi-reta positiva:
A
O
B
OA OB BA AB BA OA OB =
2
= x(A)–x(B).
3. A entre O e B na semi-reta negativa:
O
B
A
3
BO BA AO AB BA BO AO=
=–x(B) – (–x(A)) =x(A) – x(B).
4. B entre O e A na semi-reta negativa:
O
A
B
4
AO AB BO AB AO BO =
= –x(A) – (–x(B)) = x(B) – x(A)
A
5. A na semi-reta positiva e B na negativa:
B
O
5
BA BO OA= –x(B) + x(A) = x(A) – x(B).
6. B na semi-reta positiva e A na negativa:
B
A
O
AB AO OB=–x(A)+x(B)= x(B)–x(A).
6
Assim, em qualquer caso, obtemos AB = x(B) – x(A).
Definição 3.4: Sejam r uma reta, O r e a função x: r IR, dada pelo
Teorema 3.3. Dado A r, o número x(A) é chamado de coordenada do
33
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
ponto A em relação a O e a função x é denominada um sistema de
coordenadas em relação a O para a reta r.
Com a relação de ordem entre os pontos de uma reta r,
estabelecida no Capítulo 2, os axiomas III.1, III.2, IV.1, e o Teorema 3.3
podemos garantir o seguinte resultado:
Corolário 3.5: Dado um número real d e fixado um ponto O de uma
reta r, existe um único ponto de r tal que sua coordenada com relação
a O é d.
Demonstração: Segue diretamente do fato da função x, dada pelo
Teorema 3.3, ser bijetora. A existência segue da sobrejetividade e a
unicidade segue da injetividade da função x construída no Teorema
3.3.
As coordenadas dos pontos caracterizam sua posição na reta.
Este é o resultado apresentado na proposição a seguir:
Proposição 3.6: Sejam A, B e C pontos de uma mesma reta, cujas
coordenadas, são respectivamente a, b e c. O ponto C está entre A e B
se, e somente se, o número c está entre os números a e b.
Demonstração: Primeiramente, suponhamos que o ponto C esteja
entre A e B, então pelo Axioma III.2, temos AB AC CB. Pelo
Teorema 3.3, temos
AB = |b – a|, AC = |c – a| e CB = |b– c|.
Assim, |b – a| = |c – a| + |b – c|.
Suponhamos que b>a, então |c – a| < b – a e |b – c| < b – a. Logo, c – a
< b – a e b – c < b – a. Portanto, c < b e a < c, ou seja, a < c < b.
No caso em que a>b, temos |c – a| < –(b – a) e |b – c| < –(b – a). Logo, c –
a > b – a e b – c > b – a. Portanto, c > b e a > c, ou seja, b < c < a. Assim,
em ambos os casos o número c está entre os números a e b.
Reciprocamente, se a < c < b ou b < c < a, temos |c – a| + |b – c| = |b – a|.
Assim, pelo Teorema 3.3, segue que AC CB AB. Em particular,
AC AB. Consideremos as semi-retas determinadas pelo ponto A. Se
34
3. Segmentos, Ângulos e Medidas
B e C estão em semi-retas opostas, pela definição de coordenadas de
pontos, as coordenadas a, b e c não poderiam satisfazer a < c < b ou b
< c < a, assim, B e C estão na mesma semi-reta em relação a A e pela
Proposição 3.2, temos que C está entre A e B, como queríamos
demonstrar.
Definição 3.7: Dado um segmento AB,
dizemos que um ponto C AB é o ponto
médio de AB, se AC CB.23.
A
C
B
A existência e unicidade do ponto médio são garantidas pela
proposição a seguir.
Proposição 3.8: Qualquer segmento tem um único ponto médio.
Demonstração: (Existência) Sejam a e b as coordenadas das
(a b)
extremidades deste segmento. Considere o número c
.
2
Afirma-mos que o segmento de coordenada c (que existe pelo Axioma
IV.1) é o ponto médio desejado. De fato:
a b
a b
AC a c a
2
2 2
a b
a b
CB c b
b
2
2 2
(a b)
donde segue que AC CB, e como o número
está entre a e b,
2
segue da Proposição 3.6 que C está entre A e B.
(Unicidade) Suponhamos que C e D sejam pontos médios do
segmento AB, então:
CD x(C) x(D)
a b
(a x(D)) (x(D) b) AD BD
x(D)
0.
2
2
2
Utilizaremos os símbolos /, //, ///, ////, sobre os segmentos para representar que
estes possuem o mesmo comprimento. Aqui estamos utilizando no desenho o símbolo “//”.
23
35
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Portanto, x(C) = x(D), pela injetividade da função x dada pelo Teorema
3.3, temos que C = D.
É importante observar que apenas
a condição C AB não é suficiente para
C
que C seja ponto médio. Se impormos
apenas a condição AC CB observe que
também não é suficiente pois podemos ter
algo como mostra o desenho ao lado onde
AC CB e C AB. Por outro lado, podemos A
B
supor somente que C está na reta rAB e
teremos como
como conseqüência da condição AC CB que C está entre A e B. De
fato, se C AB então temos B entre A e C ou A entre B e C. No
primeiro caso, AC AB BC CB e no segundo caso temos
CB AC AB AC, o que torna impossível C satisfazer a condição
AC CB e, portanto, C está entre A e B.
O conceito de distância permite
definir circunferência e círculo. Seja O um
ponto do plano e r um número real
positivo. A circunferência de centro O e
raio r é o conjunto constituído por todos os
pontos C do plano tais que OC r . O
conjunto dos pontos C que satisfazem a
desigualdade OC r é dito ser o círculo de
centro O e raio r (ou disco de centro O e
raio r). Se um ponto A é tal que OA< r,
dizemos que A está no interior do círculo.
Se um ponto B é
36
r
O
3. Segmentos, Ângulos e Medidas
tal que OB> r, dizemos que B está no exterior do círculo. As
propriedades das circunferências e dos círculos serão estudadas no
Capítulo 8.24
A circunferência de centro O e raio r é uma figura plana onde
todos os pontos pertencentes a ela distam r de O e qualquer ponto
que dista r de O pertence à circunferência. Estas duas propriedades
nos levam ao conceito de lugar geométrico segundo uma
propriedade , que é uma figura plana tal que:
a) Todos os pontos pertencentes a satisfazem a propriedade .
b) Os únicos pontos do plano que satisfazem a propriedade
pertencem a .
O círculo é também um lugar geométrico. No decorrer do texto
apresentaremos outros exemplos de lugares geométricos.
O conceito de distância permite definir ainda o perímetro de
um polígono.
Definição 3.9: A soma das medidas dos lados de um polígono qualquer
é chamada perímetro do polígono.
3.2. Medidas de Ângulos
Da mesma maneira que trabalhamos com segmentos
apresenta-remos os principais conceitos e resultados relacionados a
ângulos.
24 Em geral, os termos circunferencia e disco, em qualquer texto matemático têm
sentido bastante claro, ou seja, circunferencia é a linha e disco é a região determinada pela
circunferencia. Já para o termo círculo existe uma ambiguidade em vários textos, significando
hora circunferencia ou hora disco. Neste texto, seremos rigorosos no uso desses termos,
seguindo rigorosamente a definição dada.
37
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Definição 3.10: Num semiplano, chamamos
de ângulo a figura formada por duas semiretas com a mesma origem, tal que uma das
semi-retas está sobre a reta que determina
o semiplano. As semi-retas são chamadas de
lados do ângulo e a origem comum, de
vértice do ângulo. Um ângulo formado por
duas semi-retas distintas de uma mesma reta
é chamado de ângulo raso.25
Existem várias maneiras distintas
de denotar um ângulo. É muito usual
denotar o ângulo da Definição 3.10, por
AÔB ou por BÔA. Ao utilizar esta notação, a
letra indicativa do vértice deve sempre
aparecer com acento circunflexo entre as
outras duas letras que representam os
pontos das semiretas que formam o ângulo. Quando nenhum outro ângulo exibido
tem o mesmo vértice, pode-se denotar por Ô, utilizando apenas a
letra do vértice com acento circunflexo para designar o ângulo. 26
Voltaremos agora para o grupo III de axiomas para
estabelecer medida de ângulos.
Axioma III.3: A todo ângulo corresponde um número maior ou igual a
zero e menor ou igual a 180. Este número é zero se, e somente se, ele
é constituído por duas semi-retas coincidentes. Ao ângulo raso
corresponderá o número 180.
Definição 3.11: Dado um ângulo Â, o número a que se refere este
axioma é chamado medida em graus do ângulo  e será denotado por
m(Â).
25 Alguns livros definem ângulo como a “região” determinada pelas semi-retas. Não
existe diferença entre estas escolhas mas devemos lembrar que a cada ângulo determinado por
uma definição está associado um ângulo determinado pela outra definição.
26 Note que não estamos diferenciando o ângulo AÔB do ângulo BÔA, isto somente é
feito quando se deseja trabalhar com ângulos orientados.
38
3. Segmentos, Ângulos e Medidas
Aqui também ao introduzir este axioma, estamos admitindo
que podemos fazer esta medida em graus através de algum
instrumento conhecido, que definirá uma unidade de medida. Mais
adiante veremos como construir e utilizar este instrumento.
Quando não há a necessidade de
explicitar os elementos de um ângulo, é
bem usual a utilização de letras gregas
minúsculas27 para denotar a medida do
ângulo. Neste caso é conveniente escrever
a letra grega em questão próxima do seu
vér-tice, conforme desenho ao lado.
Quando a medida é um número conhecido
escreve-se
o próprio número no lugar da letra.
Não se sabe exatamente quando o homem começou a medir
ângulos mas certamente eles já eram medidos por volta de 2.800 a.C.
na antiga Mesopotâmia. Conjectura-se que a necessidade de medir
ângulos surgiu na Astronomia, sendo talvez o primeiro estudo a
incorporar a aplicação da matemática. Por exemplo, se quisesse saber
a distância que a Lua estava acima do horizonte utilizava-se os
seguintes métodos:
Esticava-se o braço e se calculava quantos dedos
comportava o espaço entre a Lua e o horizonte ou
Segurava-se um fio entre as mãos afastadas do corpo
e se media a distância.
A medida era diferente de um comprimento comum sendo
considerado o primeiro passo para medir ângulo.
O análogo ao Axioma III.2 para ângulos é dado pelo próximo
axioma. Para isto apresentamos a seguinte definição:
27 O alfabeto grego minúsculo é dado por: (alfa), (beta), (gama), (delta),
(epsílon ou epsilo), (zeta ou dzeta), (eta), (teta), (iota), (capa), (lambda), (mi ou
mu), (ni), (xi), (omicron), (pi), (rô), (sigma), (tau), (upsilon), (fi), (qui), (psi) e
(omega).
39
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Definição 3.12: Sejam SOA, SOB e SOC semiretas com origem O. Se o segmento AB
interceptar SOC, diremos que SOC divide o
ângulo AÔB.
Pode-se mostrar que se o
segmento AB interceptar SOC, então SOC
intercepta qualquer segmento com
extremos nos lados
do ângulo. Deixamos como exercício a demonstração desta afirmação
(Exercício 3.12).
Axioma III.4: Se uma semi-reta SOC divide
um ângulo AÔB, então a medida do ângulo
AÔB é igual a soma das medidas dos
ângulos AÔC e CÔB, ou seja,
m(AÔB) = m(AÔC) + m(CÔB).
Teorema 3.13: Considere um ângulo AÔB e
SOC uma semi-reta por O onde C está no
mesmo semiplano de B com relação a reta
rOA. Nestas condições, temos que ou SOB
divide AÔC, ou SOC divide AÔB, e em ambos
os casos m(BÔC) = m(AÔC) – m(AÔB).
Demonstração: Seja A1 um ponto na semireta oposta a SOA. Consideremos o
triângulo AA1C. Então pelo Exercício 2.8,
como a reta OB corta o lado A1A do
triângulo e não passa por nenhum dos seus
vértices, (as semi-retas são distintas) temos
que OB corta AC ou A1C. Veja o desenho ao
lado. No primeiro caso AC intercepta SOB, e,
assim, pela Definição 3.12 SOB divide o
ângulo AÔC, portanto pelo Axioma III.4,
temos:
m(AÔC) = m(AÔB) + m(BÔC)
m(BÔC) = m(AÔC) – m(AÔB) (1)
40
C
B
A
O
C
B
O
A
C
B
A r
A1
O
B
C
D
A1
Ar
O
3. Segmentos, Ângulos e Medidas
No segundo caso, temos que OB intercepta A1C. Chamamos de D esta
interseção, e aplicamos novamente o Exercício 2.8, agora no triângulo
ADA1 e a reta OC. Observamos que OC intercepta AD, pois caso a
interseção fosse em A1D teríamos que a interseção de OC e A1C seriam
dois pontos, o que é absurdo pela Proposição 2.2, já que as retas A1D e
OC são distintas. Assim pelo Exercício 3.12, intercepta qualquer
segmento com extremos nos lados de AÔB inclusive o segmento AB.
Logo, SOC divide o ângulo AÔB e, portanto, pelo Axioma III.4 ,
obtemos:
m(AÔB) = m(AÔC) + m(BÔC) m(BÔC) = m(AÔB) – m(AÔC) (2)
Segue de (1) e (2) que:
m(BÔC) = m(AÔB) – m(AÔC).
Proposição 3.14: Dado um número real 0 ≤ ≤ 180, apenas um ângulo
AÔB medindo , pode ser colocado em um semiplano determinado
pela reta que contém a semi-reta SOA.
Demonstração: Suponhamos que dois ângulos AÔB e AÔC têm
medida graus. Então, pelo Teorema 3.13, SOC divide AÔB ou SOB
divide AÔC e em ambos os casos m(BÔC) = m(AÔC) – m(AÔB)=–
=0. Assim, as semi-retas SOC e SOB coincidem.
Vamos agora apresentar o recíproco do Axioma III.3:
Teorema 3.15: Para qualquer número real , tal que 0 < < 180, existe
um, e somente um ângulo cuja medida em graus é .
Demonstração: (Existência) Em primeiro lugar, afirmamos que
existem ângulos cuja medida em graus é arbitrariamente pequena. De
fato, seja AÔB um ângulo qualquer e sua medida em graus. Tomemos
um ponto
41
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
C qualquer no segmento AB, conforme
mostra o desenho ao lado. Por definição, a
B
semi-reta OC, divide o ângulo AÔB e, pelo
C
Teorema 3.13, m(AÔC) + m(CÔB) = m(AÔB).
Assim, a menor das medidas em graus
O
A
entre os ângulos AÔC e de CÔB é menor ou
igual
a /2. Da mesma maneira construímos ângulos cujas medidas é menor
ou igual a /4, /8, etc. Assim, existem ângulos cujas medidas em
graus podem ser arbitrariamente pequenas. Consideremos uma reta r
e um ponto O arbitrário. Sejam A e A’ pontos em lados distintos em
relação ao ponto O, ou seja, existem duas semi-retas opostas SOA e
SOA’. Pelo resultado acima, podemos encontrar um ângulo A’ÔB, cuja
medida é
menor que (180º– ), em um dos semi-planos determinado por r. Assim, o ângulo B
X’
AÔB é maior que . Seja X um ponto
X0
arbitrário no segmento AB. Denotemos por
X
M() o conjunto dos pontos X em AB, tal
r
que o ângulo AÔX é menor ou igual a .
A
O
A’
Seja d o supremo dos comprimentos dos
segmentos
AX quando X M() e X0, o ponto de AB tal que AX0 = d (que existe
pelo Axioma III.2). Afirmamos que o ângulo AÔX0 tem medida . De
fato,
1. Suponhamos por absurdo que m(AÔX0)= < . Marquemos a partir
da semi-reta SOX0 no semi plano OX0 ,B1 , um ângulo X0ÔX’, com medida em graus menor que a medida em graus de X0ÔB1 e menor também
que .– . Então a medida do ângulo AÔX’ é menor que a medida
(temos = + m(X0ÔX’) < + (.– ) = ), que é absurdo, pois AX' >
AX0 = d e o ponto X’ estaria em M() por definição.
2. Suponhamos agora que m(AÔX0)= > . Tomemos um ângulo
X0ÔX’ a partir da semi-reta SOX0 no semi-plano OX0 , A , menor que os
ângulos AÔX0 e – . Então a medida do ângulo AÔX’ é maior que
(temos = – m(X0ÔX’) > – ( + ) = ). Pela definição de M() e de
42
3. Segmentos, Ângulos e Medidas
X0, existe um ponto X”, arbitrariamente próximo de X0, tal que o
ângulo AÔX” tem medida menor ou igual a , e desta forma o ponto
X’, está no segmento AX”. Assim, o ângulo AÔX’ tem medida menor
que , o que é uma contradição.
Por 1. e por 2. , temos que o ângulo AÔX tem medida .
(Unicidade) Segue imediatamente da Proposição 3.14.
Exemplos
3.3. Consideremos três ângulos AÔC, AÔB e BÔC, onde AÔB e BÔC
medem 30o e 40o, respectivamente. Temos, pelo Axioma III.4, que
m(AÔC) =m(AÔB) + m(BÔC) = 70.
3.4. Dois ângulos são denominados consecutivos quando possuem um
lado em comum. No Teorema 3.13 temos que se SOC divide um ângulo
AÔB então AÔC e CÔB são consecutivos com o lado SOC em comum e
se SOB divide AÔC temos que AÔB e BÔC são consecutivos com o lado
SOB em comum.
Agora podemos estabelecer unidades de medida de ângulos e
construir um instrumento que servirá para comparar ângulos.
Considere o ângulo raso AÔB, cuja medida já sabemos que é 180.
Escolhamos um semiplano determinado pela reta AB. Neste
semiplano, utilizando a Proposição 3.14 construa um ângulo cuja
1
medida é
. Este é o ângulo cuja medida vale 1 grau e que
180
denotamos por 1o. É justamente isto que se faz para construir um
transferidor ilustrado na foto a seguir.
43
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
3.3. Congruência de Segmentos e Ângulos
Os segmentos e os ângulos estão espalhados por todo o
plano. Assim é interessante separá-los em determinadas classes e o
critério para fazer será dado pelas suas medidas.
Definição 3.16: Dois segmentos são congruentes quando possuem o
mesmo comprimento.
Proposição 3.17: A congruência entre segmentos é uma relação de
equivalência.
Demonstração: Segue imediatamente do fato da relação de
igualdade entre números reais ser uma relação de equivalência.
Definição 3.18: Dois ângulos são congruentes quando possuem a
mesma medida.
Proposição 3.19: A congruência entre ângulos é uma relação de
equivalência.
Demonstração: Segue imediatamente do fato da relação de
igualdade entre números reais ser uma relação de equivalência.
Observe a diferença entre a afirmação de que dois segmentos
são iguais e que dois segmentos são congruentes. Na geometria a
44
3. Segmentos, Ângulos e Medidas
posição de seus objetos é importante e a relação de congruência
serve para dividir esses objetos em classes de equivalência segundo
uma medida. A mesma diferença ocorre entre igualdade e
congruência de ângulos.
Definição 3.20: Dois ângulos são ditos
A
suplementares se a soma de suas medidas
o
é 180 . O suplemento de um ângulo é o
ângulo de mesmo vértice, com um dos C
O
lados em comum e o outro lado é a semiB
reta obtida pelo prolongamento do outro
lado, como mostra o desenho ao lado. Com
a interseção de duas retas r e s, formam-se
quatro ângulos, como no desenho ao lado.
Os ângulos AÔB e DÔC são ditos opostos
pelo vértice. Analogamente para os
ângulos AÔD e BÔC.
Proposição 3.21: Dois ângulos opostos pelos vértice são congruentes.
Demonstração: Com efeito, considerando
A
o desenho ao lado, devemos mostrar que
D
DÔC BÔA. De fato, como o ângulo BÔD é
O
raso, então BÔA e AÔD são ângulos
suplementares e, daí
C
B
m(BÔA) + m(AÔD) = 180o.
(1)
Por outro lado, AÔC também é um ângulo
raso, então AÔD e DÔC são ângulos suplesuplementares, logo
m(DÔC) + m(AÔD) = 180o.
(2)
Por (1) e (2), temos
m(BÔA) + m(AÔD) = m(DÔC) + m(AÔD)
m(BÔA) = m(DÔC) + m(AÔD) – m(AÔD) m(BÔA) = m(DÔC),
obtendo assim o desejado.
45
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Definição 3.22: Um ângulo, cuja medida é
90o chama-se ângulo reto. Quando duas
retas se interceptam, formando ângulo
reto28, dize-mos que estas retas são
perpendiculares.
s
r
O desenho ao lado ilustra como, em
geral, é denotado um ângulo reto.
Teorema 3.23: Por qualquer ponto de uma reta r passa uma única
perpendicular a esta reta.
Demonstração: (Existência) Seja O um
s
ponto qualquer em r. Vimos que r
determina dois semiplanos e pelo Teorema
B
2.5, O divide r em duas semi-retas. Seja SOA
uma das semi-retas que contém um ponto
A r diferente de O. Pelo Teorema 3.15
podemos construir uma semi-reta SOB que
r
O
A
forma um ângulo de 90o com SOA, em um dos
semiplanos
determinado por r. Como A e B estão em semi-retas distintas, as retas
rOA e rOB serão perpendiculares. De fato, sejam SOC e SOB as semi-retas
opostas
a SOA e SOD respectivamente. Como SOA
forma ângulo de 90o com SOB, e como AÔB
B
e BÔC são ângulos suplementares, então
O
BÔC é um ângulo reto, mas como AÔB é
oposto pelo vértice a CÔD, e BÔC é oposto
A
C
pelo vértice a DÔA, da Proposição 3.21,
D
m(CÔD) = 90o e m(DÔA) = 90o. Logo, as
retas r e s se interceptam formando
angulos
retos
e,
por-tanto,
são
perpendiculares.
(Unicidade) Segue imediatamente da Proposição 3.14.
28
Isto é possível pela Proposição 3.21 e Definição 3.20
46
3. Segmentos, Ângulos e Medidas
Exemplo
s
3.5. Dado um segmento AB numa reta r,
chamamos de mediatriz do segmento AB,
a reta s perpendicular à reta r que passa
pelo ponto médio M de AB.
A
M
B r
3.6. Dado um ângulo AÔB, a semi-reta SOC tal que m(AÔC) = m(CÔB) é
denominada bissetriz do ângulo AÔB. Vamos mostrar que existe uma
única bissetriz de um ângulo. De fato, dado um ângulo AÔB, considere
m(AÔB)
o número real =
. Pela Proposição
2
B
3.14, existe um único ângulo AÔC de lado
C
SOA no semiplano OA,B medindo graus.
Como < m(AÔB) temos que SOC divide
O
A
AÔB e m(AÔB) = m(AÔC)+m(CÔB).
Logo, m(CÔB) = m(AÔB) – m(AÔC) = 2 – = = m(AÔC).
Para finalizar este capítulo apresentamos a seguir um novo
diagrama com todas as figuras que foram apresentadas até agora, já
incluídas as definições apresentadas nos Exercícios 3.9 e 3.11. É
importante lembrar que na classe de segmentos existem as
subclasses determinadas pelas medidas e na classe de polígonos
existem as subclasses determinadas pelo número de lados.
47
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
3.4. Exercícios
3.1. Sejam M, N e P três pontos de uma reta r, tal que MN 7 , NP 9 e
MP 2 . A coordenada de M em relação a um ponto O de r é 3. Quais
são as possíveis coordenadas de N e P se
a) a coordenada de M é menor que a de N?
b) a coordenada M é maior que a de N?
3.2. Sejam M, N e P três pontos de uma reta r, tal que MN 12 , NP 7
e MP 5 . É possível determinar qual ponto está entre os outros dois?
Justifique sua resposta.
3.3. Três sistemas de coordenadas diferentes são fixados em uma
mesma reta, denominados I, II e III, com origens O, O’ e O’’
respectivamente, mas todos com a mesma unidade de comprimento.
Na reta, há três pontos fixos, A, B e C, que são designados por suas
coordenadas da seguinte maneira:
No sistema I a coordenada de A é –6 e a de B é –2 .
No sistema II, as coordenadas de A e C são respectivamente –
4 e –3 .
No sistema III, as respectivas coordenadas de C e B são 4 e 7.
a) Que ponto está entre os outros dois ?
48
3. Segmentos, Ângulos e Medidas
b) Determine as possíveis coordenadas de O’ e de O’’, no sistema I.
3.4. Considere em uma reta r um sistema de coordenadas com origem
num ponto O, ou seja, nesse sistema o ponto O tem coordenada zero.
Seja O’ um ponto de r de coordenada –1 nesse sistema.
a) Se considerarmos um novo sistema de coordenadas, no qual o
ponto O’ tem coordenada zero, qual a coordenada de O nesse novo
sistema de coordenadas?
b) Se um ponto A da reta, tem coordenada 3 no 1o sistema, qual a
coordenada de A no 2o sistema?
c) Se um ponto B tem coordenada –3 no 2o sistema qual a coordenada
de B no 1o sistema?
3.5. Sejam A e B pontos de uma reta com coordenadas –3 e 5,
respectivamente, em relação a um ponto O da reta de coordenada
zero. Assuma uma unidade de comprimento e marque estes pontos
em r. Em seguida calcule e marque o ponto médio C de AB. Encontre
também as coordenadas dos pontos médios de AC e CB, denominados
D e E, respectivamente. Quem é o ponto médio de DE ? Justifique.
3.6. Considere um segmento AB. Mostre que existe um único ponto C
AC
= k, onde k é qualquer número real positivo.
entre A e B tal que
BC
3.7. Sejam A, E, K três pontos de uma reta r. As coordenadas de A e K
são 2 e 18 , respectivamente. Se AE EK, qual é a coordenada
de E?
3.8. Se P é ponto de interseção de duas circunferências de raio r e
centros O e O’, demonstre que PO PO' .
49
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
3.9. Um triângulo cujos lados tem o mesmo
comprimento é chamado triângulo
eqüiláte-ro, se o triângulo contiver dois
lados de mesmo comprimento, ele é
chamado triân-gulo isósceles, nesse caso
os lados iguais são chamados laterais e o
terceiro lado de base, e se o triângulo
possuir todos os lados distintos ele é
denominado triângulo escaleno. Considere uma circunferência de raio r e centro O. Sejam A e B,
pontos desta circunferência. O que podemos afirmar sobre o triângulo
OAB? Se o triângulo OAB for eqüilátero, o que podemos dizer sobre o
segmento AB?
3.10. Em desenho geométrico, temos como únicos instrumentos de
construção uma régua não graduada e um compasso.
a) Estes instrumentos estão associados a que axiomas?
b) Como você faria nesse caso para construir:
- Um triângulo escaleno dado os seus três lados?
- Um triângulo isósceles, sendo dados um lado e a base?
- Um triângulo eqüilátero dado um lado?
- Um quadrilátero com todos os lados congruentes ?
3.11. Dados dois ponto F e F’ e um número
real d, maior que o comprimento do
segmento FF’, o lugar geométrico dos
pontos C que satisfazem a propriedade
CF CF' =d é denominado elipse, os pontos
F e F’, são chamados focos da elipse. Defina
nesse caso o que seriam pontos interiores
e exteriores a uma elipse.
F
F’
3.12. Demonstre que se o segmento AB interceptar a semi-reta SOC que
divide o ângulo AÔB, então SOC intercepta qualquer segmento com
extremos nos lados de AÔB.
50
3. Segmentos, Ângulos e Medidas
3.13. Mostre que se um ângulo e o seu suplemento têm a mesma
medida então o ângulo é reto.
3.14. Mostre que as bissetrizes de um ângulo e do seu suplemento são
perpendiculares.
3.15. Dizemos que um ângulo é agudo se sua medida é menor que 90o.
Dizemos que um ângulo é obtuso se sua medida é maior que 90o.
Mostre que o suplemento de um ângulo agudo é sempre obtuso.
3.16. Dizemos que dois ângulos são complementares se a soma de
suas medidas é 90o. Um ângulo mede o dobro do seu comprimento
menos 30o, calcule a medida deste ângulo?
3.17. Mostre que se a medida do complemento de um ângulo é igual a
medida do suplemento de um ângulo, então a diferença entre as
medidas destes ângulos é um ângulo reto.
3.18. Desenhe uma poligonal ABCDE, sabendo-se que
AB 3 cm,
BC CD 2 cm, DE 4 cm e os ângulos m( AB̂C ) = 60o, m( BĈD ) = 30o
e m( CD̂E) = 45o. Quantas poligonais são possíveis construir com estes
dados?
3.19. Sejam dois ângulos AÔB e AÔC num semiplano AO,B, tal que
m(AÔB) < m(AÔC). Mostre que SOB divide AÔC.
3.20. Considere um ângulo AÔB e um número real positivo k, tal que 0<k<1,
mostre que existe uma única semi-reta SOC, com m(CÔB) = k.m(AÔB).
51
Capítulo 4: Congruência de Triângulos
Neste capítulo, trabalharemos com o quinto grupo de axiomas
que estabelece condições de congruência de triângulos.
Os triângulos podem ser vistos como figuras básicas da
geome-tria e o estudo de suas propriedades facilita descobrir as
propriedades de outras figuras29.
Definição 4.1: Dois triângulos ABC e DEF,
são ditos congruentes, se existir uma função
bijetora f: {A,B,C} {D,E,F}, que leva os
vértices de um, nos vértices do outro, de
tal modo que lados e ângulos
correspondentes sejam congruentes, ou
seja,
A
F
E
m(Â) = m( f (A) ),
AB f (A)f (B) ,
m( B̂ ) = m( f (B) ),
AC f (A)f (C) ,
B
C D
m( Ĉ ) = m( f (C) ), BC f (B)f (C) .
Escreveremos ABC DEF, para dizer que os triângulos ABC e DEF são
congruentes.30
Por exemplo, suponha que ABC seja congruente a DEF, então
existe uma função bijetora f: {A,B,C} {D,E,F} que mantém inalteradas as medidas dos ângulos e lados correspondentes. Para fixar a
idéia, suponhamos f(A) = D, f(B) = E e f(C) = F, então devemos ter Â
D̂ , B̂ Ê, Ĉ F̂, AB DE, AC DF e BC EF.
29
Euclides colocou em seu livro um grande número de proposições relacionadas a
triângulos.
30
Na prática a congruência de triângulos significa que podemos sobrepor os dois
triângulos de forma que não apresentem diferenças em suas medidas.
4. Congruência de Triângulos
Exemplo
4.1. No desenho abaixo os dois primeiros triângulos são congruentes e
os dois últimos não são congruentes.
Proposição 4.2: A congruência entre triângulos é uma relação de
equivalência no conjunto dos triângulos.
Demonstração: É claro que ABC ABC. Basta definir a função
f: {A, B, C} {A, B, C} como sendo a função identidade e teremos que
f satisfaz a Definição 4.1, pois a congruência entre ângulos e
segmentos é uma relação reflexiva. Logo, a congruência é reflexiva.
Suponhamos agora que ABCDEF, então pela Definição 4.1 existe f:
{A,B,C}{D,E,F} bijetora tais que as medidas de ângulos e segmentos
correspondentes são congruentes assim, podemos considerar a
sua função inversa f –1: { D, E, F} { A, B, C}. Temos que f –1 é bijetora
e satisfaz as condições da Definição 4.1, posto que a congruência
entre ângulos e segmentos é uma relação simétrica. Portanto DEF
ABC. Finalmente suponhamos que ABC DEF e DEF GHI, então pela
Definição 4.1 existem funções f: {A, B, C} {D, E, F} e g: { D, E, F}
{G, H, I} bijetoras tais que as medidas de ângulos e segmentos
correspondentes são congruentes. Considere a função composta h=gf:
{A,B,C}{G,H,I}. Temos que h é bijetora e satisfaz as condições da
Definição 4.1, pois a congruência entre segmentos e ângulos é uma
relação transitiva. Logo, ABC GHI.
Como veremos nas próximas seções, para se ter congruência
de triângulos, não é necessário ter, a princípio, os seis elementos
correspondentemente congruentes. Iniciaremos com o axioma básico
de congruência de triângulos:
53
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Axioma V.1: Dados dois triângulos ABC e DEF, se AB DE, AC DF e  D̂ ,
então B̂ Ê.
Por troca de símbolos temos, sob as hipóteses do Axioma V.1,
que são sempre verificadas as duas congruências B̂ Ê e Ĉ F̂ .
A partir deste axioma obteremos todos os casos de
congruência de triângulos, a saber: Lado-Ângulo-Lado, Ângulo-LadoÂngulo, Lado-Lado-Lado, Lado-Ângulo-Ângulo Oposto e Lado-LadoÂngulo Reto31.
4.1. O Caso LAL
Baseado no axioma anterior obtemos o primeiro caso de
congruência:
Teorema 4.3 (Caso LAL): Dados dois triângulos ABC e DEF, se AB DE,
AC DF e  D̂ , então ABC DEF.
Demonstração: Pelo Axioma V.1 obtemos B̂ Ê e Ĉ F̂ e assim falta
somente mostrar que BC EF. Suponhamos, por contradição, que BC
C
não seja congruente a EF. Considere um
ponto G em EF tal que BC EG e, novamente,
pelo Axioma V.1 aplicado aos triângulos ABC
E
e DEG, temos  congruente a E D̂ G. Como
 é congruente a D̂ , temos E D̂ G D̂ o que A
B
D
contradiz a Proposição 3.14. Logo, BC EF,
G
como queríamos demonstrar.
F
Este teorema é conhecido como primeiro caso de congruência
de triângulos e muitas vezes denotado por LAL, significando “lado,
ângulo e lado”, por razões óbvias. A vantagem deste resultado é que
para concluir a congruência entre dois triângulos não é necessário
31 Os casos mais freqüentemente apresentados são os quatro primeiros, decidimos
apresentar um quinto caso (sempre apresentado como exercício) para enfatizar a possibilidade
de ocorrer congruencia do tipo LLA quando o ângulo é reto.
54
4. Congruência de Triângulos
comparar os três lados e os três ângulos, basta comparar dois lados e
o ângulo determinado por eles.
Exemplos:
C
4.2. No desenho ao lado, os triângulos são
con-gruentes. Temos neles AB A’B’ e BC
B’C’. Além disso os ângulos indicados são
congruentes. Logo, pelo Teorema 4.3, os
triângulos ABC e A’B’C’ são congruentes.
B’
B
A
A’
C’
4.3. É importante observar a correspondência entre os lados e o
ângulo, ou seja, os ângulos congruentes devem ser formados pelos pares
de lados congruentes. Considere um triângulo isósceles ABC com base
BC. Na reta BC tome um ponto D tal que C está entre B e D e obtenha o
triângulo ABD (desenho ao lado). Nos triângulos
A
ABD e ACD temos AB AC, lado AD e ângulo
D̂ comuns. Assim, temos dois triângulos
com dois lados e um ângulo congruente,
que podemos denotar por ALL. Porém,
neste caso, vemos que os triângulos não
C
D
são congruentes. Logo, dois lados e um B
ângulo
congruente não é caso de congruência.
4.4. Uma outra maneira de construir dois triângulos não congruentes
mas que tenham dois lados congruentes e um ângulo congruente
pode
ser feita construindo dois triângulos ABC e
D
DBC tais que a medida de AB é menor do
A
que a medida de AC e a medida de BD é
igual a medida de AC (veja desenho ao
lado). Assim, temos dois triângulos com
C
dois pares de lados congruentes (BC,BC) e B
(BD,AC) e um
55
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
par de ângulos congruentes ( B̂ , B̂ ) e, no entanto, por construção, ABC
e DBC não são congruentes.
4.5. No desenho ao lado, CM̂A é um ângulo
A
reto e M é ponto médio de AB. Vamos
mostrar que o segmento CA é congruente
ao segmento CB. De fato, como CM̂A é um
M
ângulo reto e BM̂A é um ângulo raso C
temos que CM̂B também é um ângulo reto
e
B
portanto pelo Teorema 4.3 (Caso LAL), os triângulos CBM e CAM são
congruentes. Logo CA CB.
Como conseqüência do Teorema 4.3 temos o seguinte
resultado:
Corolário 4.4: Num triângulo isósceles os ângulos da base são
congruentes.
Demonstração: Suponhamos que num triângulo ABC tenhamos
ABAC, isto significa que o triângulo ABC é isósceles de base BC.
Considere a função f : {A,B,C} {A,B,C}, entre os vértices do mesmo
triângulo ABC, tal que f (A) = A, f (B) = C e f (C) = B. Como f é bijetora,
AB AC, AC AB (por hipótese) e  Â, segue do Teorema 4.3 (caso
LAL), que f define uma congruência. Logo, B̂ Ĉ .
A recíproca deste resultado também é verdadeira mas, para
isto, necessitaremos de outro caso de congruência. Antes disso,
veremos uma aplicação do Corolário 4.4 (Teorema 4.6) e outra
aplicação utilizando o Teorema 4.3, fornecendo um resultado
(Teorema 4.8) sobre ângulos externos de um triângulo que ainda será
definido.
Definição 4.5: Seja ABC um triângulo qualquer e D um ponto na reta
BC. O segmento AD, denomina-se:
56
4. Congruência de Triângulos
mediana do triângulo relativo ao lado BC se D é o ponto
médio de BC.
altura do triângulo relativo ao lado BC, se a reta AD é
perpendicular a reta BC.
Os ângulos Â, B̂ e Ĉ são denominados opostos aos lados BC, AC e AB,
respectivamente.
Observe que num triângulo determinamos três alturas e três
medianas.
Teorema 4.6: Em um triângulo isósceles a mediana relativa a uma base
é também a altura relativa a base e está sobre a bissetriz do ângulo
oposto a esta base.
Demonstração: Seja ABC um triângulo B
isós-celes de base BC (ver desenho ao lado).
Su-ponhamos que AD seja a mediana
relativa a base. Consideremos os triângulos D
A
ABD e ACD. Como o triângulo é isósceles,
temos AB AC e, pelo Corolário 4.4, temos
B̂ Ĉ . Como AD é mediana relativa a BC,
C
temos BD CD, e
assim pelo Teorema 4.3 (caso LAL) os triângulos ABD e ACD são
congruentes. Como BD̂C é um ângulo raso e ABD ACD temos
AD̂B AD̂C . Logo, cada um destes ângulos mede 90o e assim a reta
AD é perpendicular a reta BC, concluindo que AD é altura relativa a BC.
Ainda pela congruência de ABD com ACD, temos BÂD CÂD e assim
AD é bissetriz de BÂC.
Definição 4.7: Num triângulo ABC, os ângulos Â, B̂ e Ĉ são chamados
ângulos internos do triângulo. Os suplementos destes ângulos são
chamados de ângulos externos do triângulo.
Há resultados interessantes
começaremos com os ângulos externos:
57
sobre
estes
ângulos,
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Teorema 4.8 (do Ângulo Externo): Todo ângulo externo de um
triângulo mede mais que qualquer dos ângulos internos a ele não
adjacentes.
Demonstração: Consideremos um triânguF
B
lo ABC como no desenho ao lado. Sem
perda de generalidade vamos mostrar que
E
o re-sultado é válido para o ângulo externo
dado pelos lados CA e BA. Vamos utilizar o
Axioma II.2 e escolher um ponto D tal que A C
A
D
esteja entre C e D. Queremos mostrar que
m(DÂB) > m( AB̂C ) e m(DÂB) >m( AĈB ). Mostremos inicialmente que
m(DÂB) >m( AB̂C ). Considere E o ponto médio de AB. Na reta CE,
marque um ponto F tal que E esteja entre C e F, e de tal modo que
CEEF. Tracemos AF. Notemos que BE AE, CE EF (por construção)
e BÊC AÊF (opostos pelo vértice). Assim, pelo Teorema 4.3 (Caso
LAL), BEC AEF. Conseqüentemente, B̂ EÂF. Como E está entre C e
F, afirmamos que a reta AF não corta o segmento BC. De fato, se AF
cortasse BC, então, por definição, AF dividiria o ângulo CÂB, e assim
pelo Exercício 3.12, AF cortaria CE num ponto Y, logo teríamos que Y
AF e Y CE = CF e portanto, por F e Y estariam passando as retas AF e
CF que são distintas, pois E CF e E AF, o que é um absurdo. Assim,
considerando o triângulo CBD e o Exercício 2.8,
B
temos que AF corta BD e assim AF divide o
G.
ângulo DÂB. Pelo Axioma III.4, temos
m(BÂD)=m(BÂF)+m(FÂD)>m(BÂF)= m( AB̂C ).
Para demonstrar que m(DÂB) >m( AĈB ),
.
D
seja E o ponto médio de AC. Tracemos a C
E
A
semi-reta SBE e marcamos um ponto F em
SBE tal que BE EF e E esteja entre B e F.
F
Tracemos a semi-reta SFA e tomemos algum ponto G em SFA tal que A esteja
entre F e G como BE EF, CE AE (por construção) e BÊC FÊA (opostos
pelo vértice), temos pelo Teorema 4.3 que BEC FEA e, portanto, BĈE
FÂE. Como FÂE e DÂG são opostos pelo vértice, pela Proposição 3.21,
58
4. Congruência de Triângulos
temos FÂE DÂG. Como SFASAB, e SFA não intercepta BC, pois se esse
fosse o caso teríamos que SFA interceptaria BE em um ponto H e
portanto FA e BF teriam os pontos H e F em comum, o que é absurdo.
Logo, SFA divide o ângulo DÂB e portanto pelo Axioma III.4 m(DÂB) >
m( AĈB ), pois DÂG BĈE.
Exemplos
4.6. No desenho ao lado, m( AĈE)<m( AB̂D ).
Vamos mostrar que m(AB̂D) m(AB̂C) . De
fato, sabemos pelo Teorema 4.8 que
m(AĈE) m(Â) e m(AĈE) m(AB̂C) , mas, D
por hipótese, m(AĈE) m(AB̂D) , assim se
A
B
C
E
m(AB̂D) m(AĈE) e m(AĈE) m(AB̂C)
então m(AB̂D) m(AB̂C) .
4.7. No desenho ao lado, B, D e A são
colineares. Do mesmo modo D, E e C são
A
colineares. Vamos mostrar que a medida de
D
AÊC é maior que a medida de DB̂C . De
E
C
fato, do desenho vemos que AD̂C é ângulo B
externo ao triângulo BCD (suplementar do ângulo interno D̂ do triângulo
BDE) e portanto, pelo Teorema 4.8, temos que m(AD̂C) m(DB̂C) .
Temos também que AÊC é ângulo externo no triângulo ADE e
portanto, pelo Teorema 4.8, m(AÊC) > m(AD̂E) . Daí como
m(AD̂E) m(DB̂C) e m(AÊC) > m(AD̂E) , então m(AÊC) > m(DB̂C) .
59
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
4.2. O Caso ALA
Vamos apresentar o segundo caso de congruência, denotado
por ALA (ângulo, lado e ângulo).
Teorema 4.9 (Caso ALA): Dados dois triângulos ABC e EFG, se AB EF,
Â Ê e B̂ F̂ , então ABC EFG.
Demonstração: Consideremos um ponto D
A
G
F
na reta AC, tal que AD EG, conforme
desenho ao lado. Comparando os
triângulos ABD e EFG, temos AB EF (por
hipótese), AD EG (por construção) e  Ê
(por hipó-tese), assim pelo Teorema 4.3
D
(caso LAL) te-mos que ABD EFG. Segue
E
da definição de congruência de triângulos B
C
que AB̂D F̂ e, por
hipótese AB̂C F̂, assim temos AB̂D AB̂C. Pelo Teorema 3.13, temos
que m( CB̂D ) = 0, logo, C e D estão nas semi-retas SAC e SBC e, portanto,
C e D coincidem. Como já mostramos que ABD EFG, temos o
desejado.
Exemplos
4.8. Nos desenhos abaixo, os pares de triângulos são congruentes.
60
4. Congruência de Triângulos
4.9. Novamente devemos observar a importância da correspondência
que, neste caso, ocorre entre o lado e os ângulos, ou seja, os lados
congruentes devem ser adjacentes aos pares de ângulos congruentes.
Considere um triângulo ABC com base BC tal que o ângulo B̂ é menor
do que o ângulo Ĉ . Em C considere uma semi-reta que divide o ângulo
Ĉ tal que A Ĉ D A B̂ C e seja D a intersecção desta semi-reta com AB.
Vemos que, apesar de os pares de ângulos
C
(Â, Ĉ ) e (Â, B̂ ) serem congruentes e o lado
AC ser comum aos triângulos ABC e ADC,
estes não são congruentes. O caso ALA
impôs uma condição sobre o lado, ou seja,
deverá ser adjacente aos ângulos, o que
não acontece com o lado AC no triângulo
ABC neste caso. Mais adiante veremos A
B
D
que, apesar de não termos lados adjacentes mas a correspondência entre os
elementos congruentes dos triângulos se mantiver obtemos um caso
de congruência denominado LAAo.
Como conseqüência do Teorema 4.9 temos a recíproca do
Corolário 4.4.
Corolário 4.10: Num triângulo ABC, se os ângulos relativos a um dos
lados são congruentes, então o triângulo é isósceles.
Demonstração: Suponhamos que B̂ Ĉ . Vamos comparar o triângulo
ABC com ele mesmo. Seja a função f : {A,B,C} {A,B,C}, tal que
f(A) = A, f(B) = C e f(C) = B. Como B̂ Ĉ , Ĉ B̂ (por hipótese) e BC
CB, segue do Teorema 4.9 (caso ALA) que esta função estabelece uma
congruência e assim AC AB.
61
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Exemplos
4.10. No desenho ao lado temos B̂ D̂ e
=, ou seja, AC é bissetriz do ângulo BÂD.
B
Vamos mostrar que é igual a e BCCD,
assim AC é altura do triângulo ABD e AC é
C
mediana de BC. De fato, pelo Corolário A
4.10, ABD é isósceles e assim AB AD e
D
como, por hipótese, = e B̂ D̂ , pelo
Teorema 4.9 (Caso ALA), ABC ADC e,
portanto, = e
BC CD. Como + = 180o, temos = = 90o e, portanto, toda
bissetriz do ângulo oposto à base num triângulo isósceles é altura
relativa à base. De maneira análoga, mostra-se que a bissetriz é
mediana e que a altura é bissetriz e mediana no triângulo isósceles
(todos em relação à base).
4.3. O Caso LLL
Vamos demonstrar agora o caso de congruência em que apenas
a congruência dos lados dos triângulos permite a conclusão da
congruên-cia entre os triângulos. Este é o terceiro caso de
congruência de triân-gulos e chamamos de LLL (lado, lado e lado).
Teorema 4.11 (Caso LLL): Se dois triângulos têm três lados
correspondentes congruentes, então os triângulos são congruentes.
C
Demonstração: Sejam ABC e EFG dois
triângulos que tenham vértices corresponG
dentes por uma função bijetora
f: {A,B,C} {E,F,G}
A
B
tal que
f (A) = E, f (B) = F e f (C) = G,
E
F
com
D
AB EF, AC EG e BC FG.
No semiplano determinado por AB, contrário ao vértice C,
construímos um ângulo com vértice A e a mesma medida que Ê.
62
4. Congruência de Triângulos
Marcamos no lado do ângulo, distinto de AB, um ponto D que dista
de A a mesma medida de EG (ver desenho). Nos triângulos ABD e EFG,
temos AB EF (por hipótese), BÂD FÊG e AD EG (por construção),
assim ABD EFG pelo Teorema 4.3 (Caso LAL). Observemos agora que
ACD e BCD são triângulos isósceles, pois AC EG AD e CB GF DB.
Assim, utilizando o Corolário 4.4 e o Axioma III.4, temos AĈB AD̂B e
portan-to ABC ABD. Pela Proposição 4.2 temos que ABC EFG.
Exemplos
4.11. Nas fotos e figura a seguir observa-se a utilização de triângulos.
63
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Isso é comum pois no triângulo, não é
possível alterar seus ângulos sem que se B
altere também seu lado, o que justifica a
rigidez da figura triangular. Veja que isto
não ocorre com o quadrilátero pois poderíamos ter dois quadriláteros com 4 lados
respectivamente congruentes mas com
ângulos respectivamente não congruentes E
(veja desenho ao lado).
A B’
A’
D
E’
D’
4.12. Seja BC um segmento e considere A e
A
A’ dois pontos em semiplanos distintos em
relação à reta BC, tais que ABA’B e
ACA’C. Vamos mostrar que BÂC BÂ’C.
C
De fato, por hipótese, AB A’B e AC A’C B
e, além disso, BC é comum aos triângulos
ABC e A’BC, assim temos pelo Teorema 4.11
A’
(Caso LLL) que ABC A’BC. Logo, BÂC
BÂ’C. Podemos
resolver este problema sem utilizar o Teorema 4.11. Para isto, observamos que o triângulo AA’C é isosceles pois AC A' C, por hipótese.
Logo, pelo Corolário 4.4, m(CÂA’) = m(CÂ’A). Analogamente, AA’B é
isósceles pois, por hipótese, temos
AB A' B . Logo,
m(BÂA’)=m(BÂ’A). Como AA’ intercepta BC pois A e A’ estão em semiplanos distintos em relação à BC, por hipótese, temos que AA’ divide
BÂC
e
BÂ’C.
Logo,
m(BÂC)=m(BÂA’)+m(CÂA’)=m(BÂ’A)+m(CÂ’A)=m(CÂ’B).
4.13. (Construção da Bissetriz de um Ângulo) Com a ponta seca do
compasso sobre o vértice do ângulo dado e uma abertura qualquer do
compasso trace um arco de circunferência que intercepta os lados do
ângulo em pontos A e B. Utilizando como centro os pontos A e B trace
64
4. Congruência de Triângulos
duas circunferências com raio maior do
que a metade da medida do segmento AB.
Unindo uma das interseções ao vértice
determinamos a bissetriz. No desenho ao
lado, podemos ver a justificativa. A reta
OC é a bissetriz obtida pois os triângulos
OAC e OBC são congruentes pelo Teorema
4.11.
B
C
A
O
4.4. O Caso LAAo
Já apresentamos no Exemplo 4.9, dois triângulos que
possuem dois ângulos congruentes e um dos lados também
congruentes não sendo, porém, triângulos congruentes. Vamos
apresentar agora uma condição para que também ocorra congruência
de triângulos quando temos a congruência de um lado e de dois
ângulos dos triângulos. Este é o quarto caso de congruência de
triângulos que é chamado de LAAo (lado, ângulo e ângulo oposto).
Teorema 4.12 (Caso LAAo): Dados dois triângulos ABC e EFG, se BC
FG, Â Ê e Ĉ Ĝ, então ABC EFG.
G
Demonstração: Seja D um ponto na semi- C
reta SCA tal que CD GE conforme desenho
ao lado. Pelo Teorema 4.3 (Caso LAL),
temos BCD FGE. Assim CD̂B Ê Â. Se D
E
está entre C e A, temos que tomando CD̂B D
é ângulo externo no triângulo ABD e  é
ângulo interno, e assim este triângulo ABD A
B
F
não pode existir pelo Teorema 4.8.
Se A está entre C e D, CÂB é um ângulo externo do triângulo ADB e D̂
um ângulo interno e novamente o triângulo ADB não existe. Assim A
deve coincidir com D.
65
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Exemplos
4.14. Conforme veremos no Capítulo 7, o caso ângulo-ângulo-ângulo
(AAA) entre dois triângulos não garante a congruência entre dois
triângulos. Lá construiremos dois triângulos com os três ângulos
congruentes sem, no entanto, serem congruentes.
4.15. No desenho ao lado temos que o B
segmento AD é altura do triângulo ABC e
B̂ Ĉ. Pelo Corolário 4.10, ABC é um
triângulo isósceles e assim AB AC. Como, D
por hipótese, AD̂B AD̂C temos pelo
Teorema 4.12 (Caso LAAo), que ABD ACD
e assim AD é mediana de ABC e AD é
C
bissetriz do ângulo Â.
A
Observemos que juntando o Teorema 4.6, o Exemplo 4.10 e o
Exemplo 4.15, obtemos que num triângulo isósceles a mediana, a
bissetriz e a altura relativa a base coincidem.
4.16. Quando dois triângulos possuem quatro ou cinco elementos
congruentes a congruência entre os triângulos é sempre garantida.
No caso de quatro elementos congruentes temos três subcasos:
1. Os triângulos possuem três pares de lados congruentes e um par de
ângulos congruentes: Neste caso, os triângulos são congruentes pelo
Teorema 4.11 (Caso LLL).
2. Os triângulos possuem dois pares de lados congruentes e dois pares
de ângulos congruentes: Neste caso, se um dos pares de ângulos
forem adjacentes aos lados então os triângulos serão congruentes
pelo Teorema 4.3 (Caso LAL), caso contrário os triângulos serão
congruentes pelo Teorema 4.12 (Caso LAAo).
3. Os triângulos possuem 1 par de lados congruentes e três pares de
ângulos congruentes: Neste caso, considerando que o par de lados
congruentes
são
adjacentes
aos
ângulos
congruentes
correspondentes teremos, pelo Teorema 4.9 (Caso ALA), que os
triângulos são congruentes.
66
4. Congruência de Triângulos
No caso de cinco elementos congruentes é imediato pois teremos ou
três pares de lados congruentes ou três pares de ângulos congruentes
com um par de lados adjacentes correspondentes.
Com estes casos de congruência encerramos todas as
possibili- des que podem ocorrer com dois triângulos tendo três
elementos congruentes dos seis que eles possuem. Quando o
triângulo é retângulo ocorre um caso particular de congruência que
será visto num exemplo da próxima seção.
4.5. O Caso LLA
Nesta seção definiremos um triângulo muito importante e por
isso recebe o nome especial de triângulo retângulo.
Vamos apresentar o único caso de congruência que ocorre
quando temos lado, lado e ângulo, que é justamente quando os dois
triângulos são retângulos.
Para isto, veremos primeiramente uma condição que limita os
valores de dois ângulos num triângulo qualquer.
Teorema 4.13: A soma das medidas de quaisquer dois ângulos internos
de um triângulo é menor que 180o.
Demonstração: Seja ABC um triângulo
qualquer. Sem perda de generalidade,
vamos mostrar que m(Â) + m( B̂ ) < 180 o.
Seja D na reta CA tal que A esteja entre C e
D. Pelo Teorema 4.8, temos que m(DÂB) >
m( B̂ ) e assim:
m(Â) + m( B̂ ) < m(Â) + m(DÂB) =180o.
C
B
A
D
Corolário 4.14: Todo triângulo possui pelo menos dois ângulos
internos agudos. Conseqüentemente, todo triângulo tem pelo menos
dois ângulos externos obtusos.
67
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Demonstração: Se um triângulo possuir dois ângulos internos não
agudos, sua soma será maior ou igual a 180o, o que é impossível pelo
Teorema 4.13. Quanto aos ângulos externos, basta considerar os
ângulos suplementares.
Corolário 4.15: Se duas retas distintas r e s são perpendiculares a uma
terceira, então r e s não se interceptam.
Demonstração: Se r e s se interceptassem teríamos um triângulos
com dois ângulos internos retos, o que contradiz o Teorema 4.13.
Exemplos
4.17. Duas retas são denominadas paralelas
quando não se interceptam. O Corolário 4.15
garante a existência de retas paralelas. De
fato, seja r uma reta qualquer e P um ponto
pertencente a r. Pelo Teorema 3.23 existe
uma reta s perpendicular a r passando pelo
ponto P. Seja Q um ponto de s não pertencente a r e, novamente pelo Teorema 3.23
existe uma reta t passando por Q e perpendicular a s.
4.15, temos que t é paralela a r.
s
t
Q
r
P
Pelo Corolário
4.18. No desenho ao lado, tem-se = e
r
s
+ = 180o. Vamos mostrar que as retas r e s
são paralelas. De fato, suponhamos por
absurdo que r e s se interceptam num
ponto P, então teremos um triângulo cuja
soma das
medidas dos ângulos internos é maior que 180o pois + é 180o, o
que contradiz o Teorema 4.13 e portanto r e s são paralelas.
68
4. Congruência de Triângulos
4.19. Vamos mostrar que qualquer ponto da bissetriz de um ângulo, é
eqüidistante dos lados do ângulo. De fato, sejam  um ângulo
qualquer,
D um ponto da bissetriz de Â, DE e DF a
A
distância de D aos lados do ângulo
F
bissecado. Temos que m(AÊD) =
E
o
m(AF̂D) 90 e, portanto, pelo Teorema
D
4.12 (Caso LAAo) temos que AED AFD e
portanto ED DF e assim D equidista dos
lados do ângulo. Como conclusão temos
que
O lugar geométrico dos pontos que eqüidistam dos lados de um
ângulo é a sua bissetriz.
Podemos agora classificar os triângulos quanto aos ângulos:
Definição 4.16: Diremos que um triângulo é acutângulo, se ele possui
os três ângulos agudos. Um triângulo que possui um ângulo reto é
chamado retângulo, neste caso o lado oposto ao ângulo reto é
chamado de hipotenusa e os outros dois lados de catetos32. Se o
triângulo possuir um ângulo obtuso, ele recebe o nome de
obtusângulo.
Vamos apresentar agora uma última condição para que
também ocorra congruência de triângulos quando temos a
congruência de dois lados em um triângulo retângulo. Este é o quinto
e último caso de congruência de triângulos que será chamado de LLA
(lado, lado e ângulo reto).
Teorema 4.17 (Caso LLA): Se dois triângulos retângulos possuem
hipotenusas congruentes e um dos catetos congruentes, então os
triângulos são congruentes.
Demonstração: Sejam ABC e DEF dois triângulos retângulos, com
cate32
A palavra “cateto” vem do grego “káthetos” e quer dizer “vertical” ou
“perpendicular” e a palavra “hipotenusa” vem do grego “hypoteínousa” e significa “linha
estendida por baixo”.
69
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
tos AB e DE e hipotenusas BC e EF
F
C
respectivamente
congruentes.
G
Suponhamos por absurdo que ABC não seja
congruente a DEF e sem perda de
generalidade que DF AC. Assim existe um
ponto G pertencente a reta DF entre D e F,
tal que AC DG. Então ABC DEG pelo
B D
E
Teorema 4.3 (caso LAL). Logo EG BC EF e A
portanto, o triângulo EFG é isósceles,
assim
F̂ EĜF. Como EĜF é ângulo externo ao triângulo DEG temos que
m(EĜF) 90o , pelo Teorema 4.8. Assim m(F̂) m(EĜD) 180o , o que
contradiz o Teorema 4.13. Logo ABC DEF.
4.6. Existência de Perpendiculares e Paralelas
Notemos que o Corolário 4.15 não garante a existência de reta
paralela a uma reta dada contendo um ponto dado. Para garantir isto
precisaremos do seguinte resultado que garante a existência e
unicidade de retas perpendiculares:
Teorema 4.18: Por um ponto fora de uma
P
reta passa uma única reta perpendicular a
reta dada.
Demonstração: (Existência) Seja r uma
reta qualquer e P um ponto fora dela dado.
Considere dois pontos A e B quaisquer de r,
que existem pelo Axioma I.1. Trace a reta
AP. Se ela for perpendicular a r, a existência
estará demonstrada, caso contrário, no
semiplano contrário ao de P, em relação a
reta r, trace uma semi-reta com origem A e
que forma um ângulo com r congruente a
PÂB. Marque um ponto P’ nessa semi-reta
de tal modo que AP’ seja congruente a AP.
70
r
P
r
B
A
P’
4. Congruência de Triângulos
Assim teremos que AP AP’ e PÂB P’ÂB,
donde o triângulo PAP’ é isósceles e AB é
bissetriz do
ângulo PÂP’. Logo, pelo Exemplo 4.10, temos que AB é altura de APP’
em relação a PP’. Portanto PP’ é a perpendicular a r procurada.
(Unicidade) Se existissem duas perpendiculares a reta r passando por
P, teríamos um triângulo com dois ângulos retos, que é um absurdo
pelo Teorema 4.13.
Corolário 4.19: Por um ponto fora de uma reta passa uma reta paralela
a reta dada.
Demonstração: Considere uma reta r e um ponto P não pertencente
a ela. Pelo Teorema 4.18, pelo ponto P passa uma única reta s perpendicular a r. Utilizando o Teorema 3.23 temos que existe uma reta t
perpendicular a s passando pelo ponto P. Finalmente, pelo Corolário
4.15 temos que t é paralela a r e passa por P.
Observe que este corolário não garante a unicidade da reta t
mas apenas a sua existência. A unicidade é dada somente pelo Axioma
das Paralelas (Grupo VI) que será estudado no próximo capítulo.
4.7. Distância de Ponto a Reta e Desigualdade
Triangular
Vamos determinar a forma mais natural de se definir distância
de ponto a reta e apresentar um teorema que é conhecido como
desigualdade triangular. Este resultado é o único obstáculo que
impede que construamos triângulos com quaisquer tamanhos de
lados
71
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Definição 4.20: Dado uma reta r e um ponto P fora dela, traçamos a
única reta s perpendicular a r passando por P. A interseção r s = P’ é
chamada pé da perpendicular. Se Q é um
P
ponto qualquer de r distinto de P’, o
segmento PQ é dito oblíquo, relativo a r.
No desenho ao lado, o segmento QP’ é
chamado de projeção do segmento QP
sobre a reta r. O comprimento do
r
segmento PP’ é definido como a distância Q
P’
do ponto P a reta r.
Proposição 4.21: Se dois lados de um triângulo não são congruentes,
então seus ângulos opostos não são congruentes e o maior ângulo é
oposto ao maior lado.
Demonstração: Pelo Corolário 4.10, temos a primeira parte da
proposição demonstrada. Para demonstrar a segunda parte, seja ABC
um triângulo tal que BC AC. Pelo Axioma III.1 e Axioma III.2 existe
um ponto D em CB tal que AC CD. Assim,
C
por construção, o triângulo ACD é isósceles
e os ângulos CÂD e CD̂A são congruentes.
No-temos que, por definição, a semi-reta
SAD di-vide o ângulo CÂB. Logo,
D
m(AD̂C) m(CÂD) m(CÂB) .
Mas CD̂A é um ângulo externo em relação
a ABD, logo
A
m(CB̂A) m(DB̂A) m(CD̂A) m(CÂB) .
B
Proposição 4.22: Se dois ângulos de um triângulo não são
congruentes, então os lados que se opõem a estes ângulos têm
medidas distintas e o maior lado opõe-se ao maior ângulo.
Demonstração: Pelo Corolário 4.4, temos a primeira parte da
proposição demonstrada. Para demonstrar a segunda parte, seja ABC
um triângulo tal que m(CB̂A) m(CÂB) . Existem três possibilidades
para os segmentos AC e BC. Ou AC BC, ou AC BC, ou AC BC. A
72
4. Congruência de Triângulos
primeira possibilidade não pode ocorrer, pela Proposição 4.21. A
segunda não pode ocorrer, pois neste caso o triângulo seria isósceles,
o que não se verifica. Logo, temos o desejado.
Corolário 4.23: Se P’ é o pé da
perpendicular, traçada a partir de P, como
visto no Teorema 4.18, então qualquer
segmento oblíquo PQ tem comprimento
maior que o comprimento de PP’. Veja
desenho ao lado.
P
r
Q
P’
Demonstração: Como PP’ é perpendicular a r, então m(PP̂' Q) 90o ,
daí temos que m(P' Q̂P) 90o e m(P' P̂Q) 90o e portanto PP̂' Q é o
maior ângulo do triângulo PP’Q. Assim, a Proposição 4.22 nos garante
que PQ é o maior lado do triângulo PP’Q. Logo, QP PP' .
É natural definir distância de um ponto até uma reta como
sendo a menor distância do ponto a reta. O Corolário 4.23 garante que
a Definição 4.20 é equivalente a esta.
Teorema 4.24: Em todo triângulo, a soma dos comprimentos de dois
lados é maior que o comprimento do terceiro lado.
Demonstração: Vamos mostrar por exemC
plo que AC AB BC. Consideramos um
ponto D na reta AB, tal que B está entre A e
D e BD BC. Assim o triângulo BCD é
isósceles, e consequentemente os ângulos
D
A
B
D̂ e B Ĉ D, terão mesma medida. A semi-reta
SCB, divide o ângulo AĈD , pelo modo que foi tomado o ponto D.
Portanto temos m(BD̂C) m(BĈD) m(AĈD) . Pela Proposição 4.22,
temos que AC AD AB BD AB BC.
73
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Teorema 4.25 (Desigualdade Triangular): Dados três pontos
quaisquer A, B e C no plano, tem-se que AC AB BC. A igualdade
ocorre se, e somente se, B está no segmento AC.
Demonstração: Sejam A, B e C três pontos do plano, podemos supor
que são todos distintos pois, caso contrário, o resultado é imediato.
Se A, B e C não são colineares, então pelo Teorema 4.24, temos o
resultado. Suponhamos então que A, B e C sejam colineares, logo pelo
Axioma II.1 temos três casos excludentes:
A BC: Neste caso, pelo Axioma III.2, temos BC BA AC, ou
seja, AC BC BA BC AB BC.
B AC: Neste caso, pelo Axioma III.2, temos AC AB BC, ou
seja, AC AB BC.
C AB: Neste caso, pelo Axioma III.2, temos AB AC CB, ou
seja, AC AB CB AB AB BC.
Para a segunda parte suponhamos que a igualdade ocorre, então se B
não está no segmento AC devemos ter três possibilidades:
A, B e C não são colineares, o que é impossível pois neste caso,
pelo Teorema 4.24, não teríamos a igualdade.
A BC e daí pelo Proposição 3.2 teríamos AC BC AB BC,
o que contradiz a hipótese.
C AB e daí pelo Proposição 3.2 teríamos AC BC AB BC,
o que também contradiz a hipótese. Portanto, B AC.
A recíproca é imediata do Axioma III.2.
Exemplos
4.20. O Teorema 4.25 garante que é impossível construir um triângulo
com lados medindo 7, 3 e 2. De fato, 2 + 3 < 7, contradizendo o
teorema. É impossível também construir um triângulo com lados
medindo 6, 4 e 10 pois 10 = 4 + 6.
4.21. Se uma circunferência de raio r centrada num ponto O e uma
circunferência de raio r’ centrada num ponto O’, se interceptam
74
4. Congruência de Triângulos
exatamente em dois pontos, podemos estabelecer um limitante para
o segmento OO’. Para isto, traçamos OM perpendicular P1P2, onde
P1 e P2 são os pontos de interseção das
circunferências, então OP1 r e OP2 r ,
P
2
portanto O M̂ P1 O M̂ P2. Assim, pelo
r’
r
Corolário 4.23,
OP1 OM e OP2 OM.
O M
O’
Analogamente temos que,
r
r’
O'P1 O'M e O'P2 O'M.
P1
Assim,
OO' OM O'M OP1 O'P1 r r'.
Portanto, OO' r r' .
4.22. Os lados de um triângulo cujos vértices que estão sobre uma
circunferência sempre são menores que duas vezes o raio desta
circunferência e um dos lados do triângulo será igual a este produto
apenas quando contém o centro da circunferência. Para ver isto basta
unir cada vértice de um lado com o centro da circunferência e teremos
um triângulo isósceles de lados medindo o raio da circunferência.
Aplicando a desigualdade triangular temos o desejado.
4.8. Exercícios
4.1. Sabendo que os pares de triângulos do desenho a seguir são
congruentes, utilize a notação de congruência para indicá-las. Por
exemplo, no par de triângulos (1) obtemos a seguinte congruência: ADE
BCE.
D
C
S
R P
N
I
D
W Z
C
K
A E B
(1)
P TUQ
(2)
M
O
(3)
G K H
(4)
A
(5)
B
X
(6)
Y
4.2. Demonstre que se dois segmentos dados AE e DF se interceptam
num ponto P que é ponto médio de ambos, então PDA PFE.
75
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
4.3. Suponha que um segmento BQ divida um segmento EA ao meio
em um ponto R, mas que BQ EA. Sejam S e C pontos em ER e em
AR, respectivamente, tais que RS RC, BC é perpendicular a EA e QS é
perpendicular a EA. Tem-se ainda que BÂR QÊR. Mostre que
AB̂C EQ̂S e que EA divide BQ ao meio.
4.4. Considere o desenho ao lado.
B
A
a) Suponha que tenhamos AE BC, AD
BD e DE DC. Mostre que Ê Ĉ .
b) Suponha que tenhamos AE BC, AD
BD e EÂD CB̂D . Mostre que BD̂E AD̂C.
D
c) Suponha agora que AE BC, AD BD e
que Ê Ĉ . É possível mostrar que ED CD? E
C
Se for, mostre; caso contrário explique porque.
d) Suponha ainda, que Ê Ĉ , DE DC e BD̂E AD̂C. É possível
mostrar que AE BC ? Se é, mostre, caso contrário explique porque.
4.5. No desenho ao lado, ABD e BCD são
triângulos isósceles com base DB. Mostre
A
que a reta AC é bissetriz de BÂD e é
perpendicular a DB. Mostre que os ângulos
AB̂C e AD̂C são congruentes.
D
C
B
4.6. (Construção do ponto médio de um segmento) Considere o
seguinte procedimento para determinação do ponto médio de um
segmento, utilizando apenas régua e compasso: .
“Seja AB um segmento. Com a ponta seca do compasso em A e raio AB ,
trace uma circunferência. Faça a mesma construção com a ponta seca do
compasso em B. Estas duas circunferências se interceptam em dois
pontos C e D. O segmento CD intercepta AB no ponto médio de A.
a) Justifique porque este procedimento está correto.
b) É realmente necessário que as duas circunferências tenham o
mesmo raio ? E este raio precisa mesmo ter o comprimento de AB ?
c) Mostre que a reta s que determina o ponto médio de AB é
perpendicular a AB, ou seja, s é a mediatriz de AB.
76
4. Congruência de Triângulos
d) Com a idéia dada no procedimento, proponha um método para
construir uma perpendicular a uma reta, passando por um ponto dado
na reta. E se o ponto não estiver na reta ?
4.7. No desenho ao lado, tem-se que AD,
DE, Â DÊC e AD̂E BD̂C. Mostre que os
triângulos ADB e EDC são congruentes.
D
A
C
E
B
4.8. No desenho ao lado temos = ,
mostre que r e s são paralelas.
r
s
B
A
4.9. No quadrilátero ABCD ao lado, SAE, SBE
e SCE são as bisetrizes dos ângulos Â, B̂ e
Ĉ , respectivamente. Mostre que a bissetriz
do ângulo D̂ é SDE.
E
D
4.10. No desenho ao lado um dos ângulos
externos é AĈD , pois é suplemento do
ângulo Ĉ . Mostre que, se um triângulo têm
dois ângulos externos iguais, então ele é
isósceles.
C
A
B
C
D
4.11. Mostre que num triângulo acutângulo o pé da perpendicular a um
dos lados passando pelo vértice oposto está entre os dois vértices. O
que ocorre com triângulos retângulos e obtsângulos?
4.12. Mostre que todo triângulo retângulo possui dois ângulos
externos obtusos.
77
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
4.13. O desenho ao lado é formado pelos E
segmentos AC, AE, BE e CF. Determine
quais medidas são:
a) menores que ;
b) maiores que
c) menores que .
C
D
B
F
A
B
4.14. No desenho ao lado, AB BC CD.
Demonstre que BD AB.
4.15. No desenho ao lado os triângulos ABC
e EDC são congruentes e o ponto E
pertence ao segmento BC e os pontos A, C
e D são colineares. Mostre que AD AB.
4.16. No desenho ao lado, suponha que os
ângulos B e D são retos e AB é congruente
a DC. Mostre que AD BC.
A
C
D
B
E
A C
A
D
D
B
C
4.17. Utilize o Teorema 4.17 para demonstrar o seguinte resultado:
“Sejam ABC e EFG dois triângulos quaisquer. Dada uma aplicação
bijetora
f : {A,B,C} {E,F,G}, tal que f (A) = E, f (B) = F e f (C) = G, se
AB EF, BC FG e a altura por C é congruente à altura por G, então a
correspondência é uma congruência”.
4.18. Seja ABC um triângulo retângulo em C. Se o ângulo B tem medida
o dobro do ângulo A, então AB 2BC. (Sugestão: Introduza a bissetriz
do ângulo B.)
4.19. Sejam ABC e DEF dois triângulos tais que AB DE, BC EF e
m(B̂) m(Ê) , mostre que AC DF. Prove a recíproca.
78
4. Congruência de Triângulos
4.20. Um conjunto L de pontos do plano é
dito limitado, se existe um círculo C tal que
todos os pontos de L estão no interior de C.
Caso contrário, L é dito ser ilimitado. Demonstre que:
a) Os segmentos de reta são limitados.
b) Os triângulos e quadriláteros são limitados.
c) Os polígonos são limitados.
79
Capítulo 5: Axioma das Paralelas
Vimos no Corolário 4.19 a demonstração da existência de uma
reta paralela a uma reta dada passando por um ponto fora dela. Neste
capítulo enunciaremos uma versão do polêmico quinto postulado de
Euclides (ver Capítulo 1), que colocamos no sexto grupo de axiomas e
que garantirá a unicidade desta reta.
5.1. O Axioma das Paralelas
Axioma VI: Por um ponto fora de uma reta r, pode-se traçar uma única
reta paralela a r.
Como conseqüência deste axioma temos o seguinte resultado
que estabelece a propriedade transitiva do paralelismo:
Proposição 5.1: Se r é paralela a duas retas distintas s e t, então s e t
são paralelas.
Demonstração: Se s t = P, teríamos duas retas paralelas a r
passando por P, contrariando o Axioma VI.
Corolário 5.2: Sejam r e s duas retas paralelas. Se t intercepta s, então
t intercepta r.
Demonstração: Se t não intercepta r, então t e r são paralelas por
definição. Como r é paralela a s por hipótese, temos pela Proposição
5.1, que s e t são paralelas, o que é uma contradição.
5. Axioma das Paralelas
Exemplos
5.1. O Corolário 5.2 garante que não pode
ocorrer algo como o desenho ao lado. As
retas r e s são paralelas e a reta t
interecepta a reta r no ponto A. Assim, a
reta t deverá interceptar a reta s e o
desenho ao lado está errado.
A
r
t
s
5.2. Seja R a relação no conjunto das retas paralelas dada por: “x R y
se, e somente se, x = y ou x é paralela a y”. Então R é uma relação de
equivalência. De fato, é claro que x R x pois x = x. Temos também que
se x R y então y R x, pois se x = y então y = x ou se x // y então y // x.
Suponhamos agora que x R y e y R z, então x=y ou x é paralela a y e
y = z ou y é paralela a z. Se x = y ou y = z a conclusão é imediata. Vamos
supor que x é paralela a y e y é paralela a z. Neste caso, temos x
paralela a z pois, caso contrário, como x é paralela a y, pelo Corolário
5.2, z interceptaria y. Logo, x R z e, portanto, como R satisfaz as
propriedades reflexiva, simétrica e transitiva, temos que R é uma
relação de equivalência.
5.3. Uma transversal a duas retas, é uma
reta que as interceptam em dois pontos
P
r
distintos. A reta t do Corolário 5.2 é uma
transversal as retas r e s, mas as retas r e s
R
não precisam ser necessariamente
Q
paralelas para que uma reta seja s
t
transversal a outras duas retas, conforme é
ilustrado no desenho
ao lado, onde temos t interceptando r e s nos pontos P e Q,
respectivamente, e r e s se interceptando no ponto R.
81
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Definição 5.3: Consideremos duas retas r e
s cortadas por uma transversal t, nos
pontos P e Q, respectivamente. Sejam A, B,
C, D, E e F, conforme desenho ao lado33. Os
pares
de
ângulos
(A P̂ F,E Q̂ B)
e
t
E
C
P
A
r
(C P̂ F,E Q̂ D) são deno-minados ângulos
s
alternos internos. Os pares de ângulos
Q
B
D
(A P̂ F,E Q̂ D)
e
(C P̂ F,E Q̂ B)
são
F
denominados ângulos colaterais internos.
Os pares de ângulos (E P̂ A,E Q̂ D), (E P̂ C,E Q̂ B), (C P̂ F,B Q̂ F) e
(A P̂ F,D Q̂ F) são denominados ângulos correspondentes.
Teorema 5.4: Dadas duas retas cortadas por uma transversal, um par
de ângulos alternos internos é formado por ângulos congruentes se, e
somente se, as retas são paralelas.
Demonstração: Sejam r e s duas retas
t
cortadas por uma transversal t nos pontos P
e Q, respectivamente. Suponhamos, por
P
absur-do, que r e s não sejam paralelas, ou A
seja, r s = R. Considere os pontos A e B
tais que P está em r entre A e R e Q está em
s entre B e R. Por hipótese, no triângulo s
B
RPQ, o ângulo externo B Q̂ P é congruente
ao angulo interno R P̂ Q, o que é absurdo
t
pelo Teorema 4.8. Logo r e s são retas
paralelas. Considerando que os ângulos
T
alternos internos P Q̂ R e A P̂ Q são
congruentes, a demonstração é análoga. V
Reciprocamente, sejam r e s retas paralelas
e t uma transversal, interceptando-as em P
e Q, respectivamente. Seja S e T pontos em s
r e s, respectivamente, tais que os ângulos
33
r
R
Q
r’
P
r
Q
S
O desenho apenas facilitará a linguagem pois as posições destes pontos podem ser
descritas todas em termos de localização nos semiplanos.
82
5. Axioma das Paralelas
T P̂ Q e
P Q̂ S sejam alternos internos. Suponhamos, por absurdo, que T P̂ Q e
P Q̂ S não sejam congruentes. Construímos então por P uma reta r’ e
marcamos um ponto V r’ tal que V P̂ Q e P Q̂ S sejam alternos
internos e congruentes. Pelo item anterior deste teorema, r’ é paralela
a s. Mas por hipótese, r é paralela a s. Assim, temos r e r’ passando por
P e paralelas a s, contrariando o axioma VI. Logo, temos o desejado.
Exemplos
5.4. Um par de ângulos correspondentes é formado por ângulos
congruen-tes se, e somente se, qualquer par de ângulos alternos
internos é formado por ângulos congruentes. De fato, sejam r e s duas
retas cortadas por uma tranversal t e os pares de t
ângulos alternos internos (Â, D̂ ) e ( Ĉ , B̂ ) e
Ê
Ĝ
os pares de ângulos correspondentes (Ê,
r
Â
B̂ ), ( Ĝ, D̂ ), (Â, F̂ ) e ( Ĉ , Ĥ ). Suponhamos que
Ĉ
B̂
Ê B̂ , como  e Ĉ são suplementares
D̂
s
temos
F̂
Ĥ
m(Â) = 180o – m(Ê) = 180o – m( B̂ ) = m( D̂ ).
Logo, Â D̂ . Como D̂ é suplementar de B̂
temos também Ĉ B̂ . Mostra-se de maneira análoga que Ĝ D̂ ,
 F̂ e Ĉ Ĥ . A recíproca segue o mesmo raciocínio. Conseqüentemente, pelo Teorema 5.4, um par de ângulos correspondentes é
formado por ângulos congruentes se, e somente se, as retas são
paralelas.
83
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
5.5. No desenho ao lado, AD é bissetriz do
ângulo CÂB e CA CD. Vamos mostrar que
C
CD é paralelo a AB. De fato,como AD é a
D
bissetriz de CÂB, temos, por definição, que
CÂD DÂB. Além disso temos, por
hipótese, que CA CD, portanto ACD é um
A
triângulo isósceles, assim segue do
B
Corolário 4.4 que, CÂD A D̂ C. Assim temos
que BÂD e AD̂C,
são ângulos alternos internos congruentes. Logo, pelo Teorema 5.4
temos que CD é paralelo a AB, mostrando assim o desejado.
5.6. Se dois segmentos AB e CD se interceptam em um ponto E, de tal
modo que AD BC e AD é paralelo a BC então AB e CD se dividem ao
C
B
meio em E. De fato, como BC // AD, do
Teorema 5.4, temos que DÂB A B̂ C, pois
são ângulos alternos internos. De maneira
E
análoga, DĈB AD̂C. Assim pelo Teorema
4.9 (Caso ALA), os triângulos AED e BEC
são congruentes e portanto AE EB e CE A
D
ED, ou seja, E é o ponto médio dos
segmentos
AB e CD.
5.7. Não existe congruência do tipo AAA
(ângulo, ângulo, ângulo). De fato,
considere um triângulo ABC e um ponto D
entre A e C. Traçamos por D uma paralela
D
ao lado AB, que intercepta BC em E. Pelo
Teorema 5.4 e pela Proposição 3.21, B̂
DÊC e  E D̂ C. Assim, os triângulos ABC e A
DEC possuem os três ângulos congruentes
e no entanto não são congruentes.
84
C
E
B
5. Axioma das Paralelas
5.8. Vamos mostrar que o enunciado feito por Euclides no seu quinto
postulado é equivalente ao enunciado do Axioma VI feito neste texto,
ou seja,
5º. Postulado
Axioma VI
Se uma reta t corta duas retas r e s de
Por um ponto P fora
modo que a soma dos ângulos
de uma reta r podecolaterais internos é menor do que se traçar uma única
180o, então r e s quando prolongadas
reta por P paralela a
se cortam daquele lado.
t r.
Antes de mostrar a equivalência,
observemos que se no desenho ao lado +
> 180o, então + < 180o pois
+++=360o+=360o–(+)<180o.
Assim, o 5º. postulado diz que se r // s então
+=180o. Suponhamos, primeiramente, que
que seja válido o 5º. Postulado. Dado uma
reta r e um ponto P, tracemos por P duas
retas s1 e s2 paralelas a r. Seja t uma
transversal a r e a s1 e s2 passando por P.
Pelo 5º. postulado, temos 1+=180o e
2+=180o (veja desenho ao lado). Logo,
1=2 e, portanto, s1 coincide com s2, sendo
assim válido o axioma VI. A recíproca é
conseqüência imediata do Teorema 5.4.
r
s
t
s2
2
s1
1
r
Proposição 5.5: Se r e s são retas paralelas, então todos os pontos de r
estão a mesma distância de s.
85
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Demonstração: Sejam A e B dois pontos
quaisquer de r. Traçamos por A e B, as
retas perpendiculares a s, encontrando-a
A
B r
nos pon-tos A’ e B’, respectivamente.
Queremos mos-trar que AA’ BB’.
Consideremos os triângu-los AA’B’ e ABB’,
conforme desenho ao lado. Como a reta
s
BB’ é transversal a r e s, temos pelo
B’
A’
Exemplo 5.4, que AB̂B' 90o AÂ'B' .
Pelo Teorema 5.4, os ângulos AB̂' A' B' ÂB, temos ainda que o lado
AB’ é comum aos triângulos AA’B’ e B’BA, logo pelo Teorema 4.12
(Caso LAAo), estes triângulos são congruentes.
5.2. Triângulos e Quadriláteros
Nesta seção, vamos estabelecer alguns resultados
relacionados a medida de ângulos e lados em triângulos e
quadriláteros.
Teorema 5.6: Em todo triângulo, a soma das medidas dos ângulos
internos é 180o.
Demonstração: Dados o triângulo ABC,
sejam , e as medidas dos ângulos
internos. Seja r a reta que passa por B
paralela ao lado AC. Temos no desenho ao
lado que:
= ’ (alternos internos)
(1)
= ’ (alternos internos)
(2)
’ + + ’ = 180
(3)
Logo de (1), (2) e (3), temos
+ + = 180.
B
’
A
r
’
C
86
5. Axioma das Paralelas
Corolário 5.7: a) A soma dos ângulos agudos de um triângulo
retângulo mede 90o.
b) Cada ângulo de um triângulo equilátero mede 60o.
c) A medida de um ângulo externo de um triângulo, é igual a soma das
medidas dos ângulos internos que não lhe são adjacentes.
d) A soma dos ângulos internos de um quadrilátero qualquer é 360o.
C
Demonstração: a) Seja ABC um triângulo
retângulo em A. Pelo Teorema 5.6 temos
que m(Â) m(B̂) m(Ĉ) 180o , mas como
m(Â) = 90o, temos
A
B
900 m(B̂) m(Ĉ) 180o m(B̂) m(Ĉ) 90o .
C
b) Num triangulo equilátero, todos os
ângulos são congruentes. Pelo Teorema 5.6
que a soma das medidas dos ângulos
internos de um triângulo é 180o, então cada
180o
B
60o , como queríamos A
ângulo mede
M
3
demonstrar.
C
c) No desenho ao lado devemos mostrar que
m(CB̂D) m(Â) m(Ĉ) . Como DB̂A é um
ângulo raso temos que
m(CB̂A) 180o m(CB̂D) .
D
B
A
Pelo Teorema 5.6, temos:
m(Â) m(Ĉ) m(CB̂A) 180o m(Â) m(Ĉ) 180o m(CB̂D) 180o
m(Â) m(Ĉ) m(CB̂D)
d) Devemos mostrar que
m(Â) m(B̂) m(Ĉ) m(D̂) 360o .
Dividindo o quadrilátero em dois triângulos,
temos, pelo Teorema 5.6, que
m(Â) m(AB̂D) m(AD̂B) 180o (1),
e
m(Ĉ) m(CD̂B) m(CB̂D) 180o . (2)
Somando (1) e (2) obtemos
87
D
A
C
B
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
m(Â) m(Ĉ) m(AB̂D) m(CB̂D) m(AD̂B) m(CD̂B) 360o
m(Â) m(B̂) m(Ĉ) m(D̂) 360o .
Exemplos
5.9. Vamos obter as medidas dos ângulos internos de um triângulo
sabendo que estão na razão 1 : 2 : 3. Seja X̂ o ângulo de menor medida, assim pelo Teorema 5.6, temos
m(X̂) 2m(X̂) 3m(X̂) 180o 6m(X̂) 180o m(X̂) 30o .
Logo, os ângulos medem 30o , 60o e 90o.
5.10. Um segmento ligando dois pontos de
uma circunferência e passando por seu
C
centro chama-se diâmetro. No desenho ao
lado, O é o centro da circunferência, AB é
B
um diâmetro e C é outro ponto da A
O
circunferência. Vamos mostrar que a
medida do ângulo CÂB é a metade da
medida do ângulo CÔB. Para isto, devemos
mostrar que
m(CÔB) 2.m(CÂB) . Com efeito, como AO OC r , onde r é o raio da
circunferência, o triângulo AOC é isósceles. Logo, pelo Corolário 4.4,
OÂC OĈA . Pelo Corolário 5.7.c temos m(BÔC) m(OÂC) m(OĈA) e,
portanto, m(BÔC) 2.m(BÂC) .
Definição 5.8: Dois lados de um quadrilátero são ditos opostos, se eles
não se interceptam. Dois ângulos são opostos, se eles não têm um
lado do quadrilátero em comum. Dois lados são consecutivos se
possuem uma extremidade em comum. Dois ângulos são
consecutivos se possuem um lado em comum. Uma diagonal de um
quadrilátero é um segmento ligando dois vértices de ângulos opostos.
Um trapézio é um
88
5. Axioma das Paralelas
quadrilátero que tem dois lados paralelos.
C H
G
Os lados paralelos de um trapézio são cha- D
mados bases e os outros dois são
denomina-dos de laterais. Um trapézio é
dito isósceles se suas laterais são
congruentes. Quando um trapézio possuir
A B E
F
um ângulo reto teremos
um trapézio retângulo. Uma altura de um trapézio é qualquer
segmen-to com extremos nas bases e perpendicular a elas. Quando os
pares de lados opostos de um trapézio são paralelos o
denominaremos paralelo-gramo.
Proposição 5.9: Um quadrilátero, no qual os pares de lados opostos
são congruentes, é um paralelogramo.
Demonstração: Seja ABCD um quadrilátero no qual AB CD e BC AD.
Traçando a diagonal BD, temos que os triângulos ABD e CDB são
congruentes pelo caso LLL. Logo:
1. AB̂D BD̂C e assim pela Teorema 5.4, as retas AB e CD são paralelas.
2. AD̂B DB̂C e assim pela Teorema 5.4, as retas AD e BC são
paralelas.
Por (1), (2) e Definição 5.8, temos que ABCD é um paralelogramo.
Proposição 5.10: Num paralelogramo temos:
a) Toda diagonal o separa em dois triângulos congruentes e, portanto,
lados e ângulos opostos são congruentes.
b) Dois ângulos consecutivos quaisquer são suplementares.
c) As diagonais se dividem ao meio.
Demonstração: a) De fato, seja ABCD um
C
D
paralelogramo qualquer e a diagonal AC.
Como AB // DC temos, pelo Teorema 5.4,
m(BÂC) m(AĈD) . Como AD // CB temos
pelo
mesmo
resultado
que
A
B
m(DÂC) m(AĈB) . Assim, peloTeorema 4.9,
(Caso ALA), temos que os triângulos ABC e CDA são congruentes.
89
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
b) Seja ABCD um paralelogramo qualquer e
D
consideremos a diagonal AC. Mostremos
que m(Â) m(B̂) 180o . No triângulo ABC,
temos pelo Teorema 5.6 que
m(CÂB) m(B̂) m(BĈA) 180o .
A
Como AD // CB então, pelo Teorema 5.4,
m(BĈA) m(DÂC) .
Assim
m(CÂB) m(B̂) m(DÂC) 1800 m(Â) m(B̂) 180o ,
posto que
m(Â) = m(DÂC) m(CÂB).
D
c) Seja ABCD um paralelogramo qualquer e
consideremos as diagonais AC e BD. Seja E
E
o encontro das diagonais. Como AB // DC,
pelo Teorema 5.4, temos que AB̂D BD̂C e
BÂC AĈD . Pelo item a), temos que
A
AB DC. Assim pelo Teorema 4.9 (Caso
ALA)
C
B
C
B
temos que os triângulos ABE e CDE são congruentes e portanto BE
DE e AE CE, ou seja, E divide AC e BD ao meio.
Proposição 5.11: Se num quadrilátero, tivermos:
a) Dois lados opostos paralelos e congruentes, então ele é um
paralelogramo.
b) Que suas diagonais dividem-se ao meio, então ele é um
paralelogramo.
Demonstração: a) Seja ABCD um quadrilátero tal que AB // DC e AB
DC, consideremos a diagonal AC. Pelo Teorema 5.4, temos C D̂ B
A B̂ D e CÂB A Ĉ D. Logo, os triângulos ADC e CBA congruentes, pelo
Teorema 4.3 (Caso LAL). Portanto DA CB. Logo, pela Proposição 5.9,
temos que ABCD um paralelogramo.
90
5. Axioma das Paralelas
b) Seja ABCD um quadrilátero tal que as
D
C
diagonais AC e BD se dividem ao meio e se
interceptam no ponto E. Observemos que,
E
pela Proposição 3.21, AÊD BÊC e AÊB
CÊD pois são ângulos opostos pelo vértice.
Logo ADE CBE e ABE CDE, pelo Teorema
A
B
4.3, (Caso LAL) e portanto AD BC e AB CD.
Assim, pela Proposição 5.9, temos que o quadrilátero é um
paralelogramo.
Teorema 5.12: O segmento ligando os pontos médios de dois lados de
um triângulo é paralelo ao terceiro lado e
A
tem metade de seu comprimento.
Re-enunciado: Dado um triângulo ABC, se D
D
E
F
e E são os pontos médios de AB e AC,
respectivamente, então a reta DE é paralela
a reta BC e BC 2. DE.
B
C
Demonstração: Seja F o ponto na semi-reta oposta a semi-reta SED,
tal que EF DE. Como E é ponto médio de AC temos EA EC. Os
ângulos DÊA e CÊF são opostos pelo vértice, logo DÊA CÊF. Pelo
Teorema 4.3 (Caso LAL), os triângulos EFC e EDA são congruentes.
Assim os ângulos  e EĈF são congruentes e alternos internos,
considerando as retas AB e FC e a transversal AC. Logo, pela
Proposição 5.1, a reta DB é paralela a reta FC. Como AD DB, pois D é
ponto médio, e AD FC pela congruência entre EFC e EDA, temos DB
FC. Pela Proposição 5.11.a BDFC é um paralelogramo. Portanto, por
definição de paralelogramo, DE é paralelo a BC. Além disso, pela
Proposição 5.11.b, temos BC DF 2.DE.
Exemplos
5.11. Vamos mostrar que os pontos médios dos lados de um
quadrilátero qualquer são vértices de um paralelogramo. De fato, seja
91
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
ABCD um quadrilátero qualquer e M, N, P e
D
P
Q os pontos médios de AB, BC, CD e DA,
C
respectivamente.
Consideremos
o
triângulo ABD, como M e Q são os pontos
Q
médios de AB e DA, respectivamente, pelo
N
Teorema 5.12, MQ // BD, da mesma forma
consideran-do o triângulo BCD temos que
B
M
NP // BD. Logo MQ // NP. Consideremos
A
agora o triângulo ABC, como M e N são pontos médios de AB e BC,
respectivamente, pelo Teorema 5.12, MN // AC, de maneira análoga
considerando o triângu-lo ACD temos que PQ // AC. Logo MN // PQ.
Como MQ // NP e MN // PQ, pela Definição 5.8, o quadrilátero MNPQ é
um paralelogramo.
Definição 5.13: Um losango, (também denominado, rombo) é um
paralelogramo cujos lados são todos congruentes. Um retângulo, é
um quadrilátero que tem todos os seus ângulos retos. Um quadrado é
um retângulo que também é um losango.
Proposição 5.14: a) As diagonais de um losango cortam-se em ângulo
reto e estão sobre as bissetrizes dos ângulos do losango.
b) Todo retângulo é um paralelogramo.
c) Se as diagonais de um quadrilátero são congruentes e se cortam em
um ponto que é ponto médio de ambas, então o quadrilátero é um
retângulo.
Demonstração: a) Seja ABCD um losango qualquer e consideremos as
diagonais AC e BD que se interceptam no ponto E. Como AB AD o
triângulo ABD é isósceles. Como o losango é um paralelogramo, pelo
item c) da Proposição 5.10, E é o ponto médio do segmento BD e,
portanto, AE é mediana do triângulo ABD em relação à BD, Logo, pelo
Teorema 4.6, AE é altura de ABD e está sobre a bissetriz de Â. De
maneira análoga, temos que BE está sobre a bissetriz de B̂ , CE está
sobre a bissetriz de Ĉ e DE está sobre a bissetriz de D̂ .
b) Seja ABCD um retângulo qualquer. Por definição AD e BC são
perpendiculares a AB logo, pelo Corolário 4.15, AD // BC.
92
5. Axioma das Paralelas
Analogamente temos AB // DC. Portanto, pela Definição 5.8, o
retângulo é um paralelogramo.
c) Seja ABCD um quadrilátero cujas diagonais AC e BD são tais que :
AC BD, AC BD E, AE EC, BE ED.
Como AE EC, BE ED e AÊB CÊD (pois são opostos pelo vértice,
pela Proposição 3.21) temos que ABE DEC pelo Axioma VI. Logo,
CD AB. Analogamente, obtemos AD BC. Além disso, os triângulos AED e BEA são isosceles, portanto EB̂A EÂBe EÂD ED̂A e
m(Â) = m(BÂE) + m(EÂD). Agora , olhando para o triângulo ABD,
temos
pelo
Teorema
5.6
que
o
m(EB̂A) m(BÂE) m(EÂD) m(ED̂A) 180 , daí 2(m(BÂE) + m(EÂD)) =
180o, ou seja, m(Â)=m(EÂD) + m(BÂE) = 90o, onde segue que m(Â) =
90o. Analogamente, mostramos que m(B̂) m(Ĉ) m(D̂) 90o .
Portanto o quadrilátero é um retângulo.
Exemplos
5.12. Como o quadrado é um losango temos
que as diagonais são perpendiculares e são
bissetrizes dos respectivos ângulos. Por
outro lado como o quadrado é um
retângulo temos que as diagonais se
interceptam ao meio e são congruentes.
5.13. Sejam A o conjunto dos triângulos, B o
conjunto dos triângulos equiláteros, C o
conjunto dos triângulos isósceles, D o
conjunto dos triângulos escalenos e E o
conjunto dos triângulos retângulos. O
diagrama ao lado apresenta estas classes
de conjuntos.
D
C
A
B
C
B
E
D
A
93
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
5.14. Sejam A o conjunto dos quadriláteros,
B o conjunto dos quadrados, C o conjunto
dos trapézios, D o conjunto dos
hexágonos,
E
o
conjunto
dos
paralelogramos, F o conjunto dos losangos,
G o conjunto dos pentágonos, H o conjunto
dos retângulos. O diagrama a seguir
apresenta estas classes de conjuntos.
G
D
C
H
B
F
E
A
C
5.15. Dado um triângulo isósceles e um
ponto P, da base, distinto dos vértices,
a
traça-se por P uma paralela a cada lado
b
D
congruente, o quadrilátero PECD é um
E
paralelogramo e, além disso, o perímetro
do paralelogramo formado é igual à soma
dos comprimentos dos lados congruentes
B
A
P
do triângulo. De fato, seja ABC um
triângulo
isósceles e P um ponto da base AB. Tracemos por P, PD e PE paralelas
a AC e BC respectivamente, então, da Definição 5.8 e da construção,
EPCD é um paralelogramo. Para obter o perímetro, seja
EC b e CD a , pelo item a) da Proposição 5.10, DP b e EP a .
Como PE // BC então CB̂P EP̂A , pelo Exemplo 5.4. Logo, o triângulo
APE é isósceles, pelo Corolário 4.10, e, portanto, AE a .
Analogamente, o triângulo BPD também é isósceles e portanto
BD b . Assim temos o resultado, pois AC BC 2.a 2.b e
EC PD EP CD b b a a 2.a 2.b .
94
5. Axioma das Paralelas
5.3. Teorema das Paralelas
Definição 5.15: Se uma transversal
intercepta duas retas r e s nos pontos A e
B, respectivamente, dizemos que r e s
determinam o segmento AB sobre a transversal. Suponha que são dadas três retas r,
s e u e uma transversal t que as intercepta
nos pontos A, B e C, respectivamente. Se
ABBC, então dizemos que as três retas
determinam
segmentos congruentes sobre a transversal t.
t
r
A
s
B
C
u
Mostraremos agora que se três paralelas determinam
segmentos congruentes sobre uma transversal, então elas
determinam segmentos congruentes sobre qualquer outra
transversal. Para isso necessitamos do seguinte resultado.
Lema 5.16: Se três retas paralelas r, s e u,
determinam segmentos congruentes sobre
uma transversal t, então elas determinam
segmentos congruentes sobre qualquer
transversal t’ paralela a t.
t
t’
A’ r
B’
s
A
B
Demonstração: Primeiramente
C C’
u
observemos que ABB’A’ e BCC’B’ são
paralelogramos. De fato, ABB’A’ é um
paralelogramo pois, por
hipótese, r // s e t // t’ e daí, AB//B’A’ e BB’//AA’, ACC’B’ também é um
paralelogramo pois, por hipótese, s // u e t // t’. Assim, BC // B’C’ e
CC’ // BB’. É dado que AB BC. Pelo item a) da Proposição 5.10, AB
A’B’ e BC B’C’, assim pela Proposição 3.17, temos que A’B’ B’C’.
95
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Teorema 5.17: Se três paralelas determinam segmentos congruentes sobre uma
transversal, então elas determinam
segmentos congruentes sobre qualquer
outra transversal.
A
t
A’ r
B
E
B’ s
G
F
C’ u
Demonstração: Sejam r, s e u as três
C
paralelas e t e t’, as duas transversais,
t1
t 2 t’
conforme desenho ao lado. Por hipótese,
AB BC e desejamos mostrar que A’B’ B’C’. Já sabemos que este
resultado é verdadeiro para t paralelo a t’, pela Lema 5.16, portanto
podemos supor que t e t’ não são paralelos. Sejam as retas auxiliares t1
paralela a t’ por B e t2 paralela a t’ por A. Pelo Exemplo 5.4 temos que
BÂE CB̂G e AB̂E BĈG, como por hipótese AB BC, os triângulos
ABE e BCG são congruentes pelo caso ALA. Logo, AE é congruente a
BG e pela Proposição 5.11, temos que BG é congruente a EF. Assim
temos que AE é congruente a EF, logo, pela Lema 5.16, temos que A’B’
B’C’, como queríamos demonstrar.
Corolário 5.18: Se três ou mais paralelas determinam segmentos congruentes sobre uma transversal, então elas determinam segmentos
congruentes sobre qualquer outra transversal.
Demonstração: Dado um número n, com n 3, de retas paralelas, se
elas determinam numa transversal segmentos congruentes,
escolhemos três retas quaisquer deste feixe de retas paralelas e
utilizamos o Teorema 5.17, concluimos que estas três retas
determinam segmentos congruentes sobre qualquer outra
transversal. Como a escolha foi arbitrária temos o resultado.
Exemplos
5.16. Vamos mostrar que se uma reta passa pelo ponto médio de um
lado de um triângulo e é paralela a um segundo lado, então passa
96
5. Axioma das Paralelas
também pelo ponto médio do terceiro lado. De fato, seja ABC um
triângulo qualqer, D o ponto médio de AC, tracemos a reta DE paralela
a AB. Queremos mostrar que EC BE. De
C
r
fato, por C tracemos a reta r paralela a AB.
Logo as retas AB, DE e r são paralelas e
como AD DC por hipótese, pelo Teorema
E
D
5.17, temos que EC BE e, portanto, E é o
ponto médio de BC, ou seja, DE divide BC
ao meio.
A
B
5.17. Vamos mostrar que o segmento ligando os pontos médios das
laterais de um trapézio (este segmento é conhecido como base média
do trapézio) é paralelo às bases e seu comprimento é a média
aritmética dos comprimentos das bases. De fato, sejam ABCD um
trapézio e E, F e G os pontos médios de AD, BC e
C
AB, respectivamente. Queremos mostrar
D
que EF // AB. Suponhamos o contrario e
traçamos por E uma reta r paralela a AB.
E
F
D’ C’
Considerando o triângulo ADG, pelo
r
Exemplo 5.16, temos que r intercepta DG
em seu ponto médio D’. Considerando
agora, o triângulo DGC, e novamente, pelo
A
B
G
Exemplo 5.16, r intercepta
CG em seu ponto médio C’. E considerando o triângulo GCB, temos
que r intercepta CB no ponto F’, que é o ponto médio de CB, pelo
Exemplo 5.16, Logo, pela Proposição 3.8, F=F’. Portanto EF // AB.
Agora, EF ED' D' C' C'F, pelo Axioma III.2. Pelo Teorema 5.12,
temos que
AG
DC
GB
ED'
, D' C'
e C' F
,
2
2
2
logo,
AG DC GB 1
1
EF
AG DC GB AB DC ,
2
2
2 2
2
como queríamos.
97
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
5.18. No desenho ao lado, DE é paralelo a
C
AB, EF é paralelo a AC e D é o ponto médio
de AC. Vamos mostrar que os triângulos
CDE e EFB são congruentes. De fato, como
E
Como DE // AB e D é ponto médio de AC
D
então pelo Exemplo 5.16, E é o ponto médio de BC e portanto BE EC. Como AC // EF,
os
ângulos
são
AĈB e FÊB
F
A
B
correspondentes
e portanto congruentes, pelo Exemplo 5.4. Como AC // EF e DE // AB, o
quadrilátero ADEF é um paralelogramo e, portanto, EF DC, pois D é o
ponto médio de AC. Assim pelo Teorema 4.3 (caso LAL) os triângulos
CDE e EFB são congruentes.
5.4. Exercícios
5.1. Mostre que se duas retas são cortadas por uma transversal e se
um par de ângulos alternos internos é formado por ângulos
congruentes, então o outro par de ângulos alternos internos também
é formado por ângulos congruentes.
C
5.2. No desenho ao lado, AB e CD se
dividem ao meio. Mostre que AD é paralelo
a CB.
E
A
B
D
5.3. a) Mostre que se duas retas r e s são cortadas por uma transversal
t e um par de ângulos internos que só contém pontos de um mesmo
semiplano determinado por t, são suplementares, então as retas r e s
são paralelas.
b) Se duas paralelas são cortadas por uma transversal, os ângulos
internos do mesmo semiplano determinado pela transversal, são
suplementares.
98
5. Axioma das Paralelas
5.4. Mostre que se a bissetriz externa de um dos ângulos internos de
um triângulo é paralela a um lado do triângulo, então o triângulo é
isósceles. Vale a recíproca?
X
P
5.5. No desenho ao lado, A,B e C são
colineares, AP AQ, BP BQ, BX BY e
CX CY. Mostre que PQ é paralelo a XY.
B
A
C
Q
Y
C
5.6. No desenho ao lado, se CD̂E CÂB e r
é perpendicular a AB, mostre que r é
perpendicular a DE.
r
E
D
A
B
T
5.7. No desenho ao lado, RT RS e PQ é
paralelo a RS. Mostre que PQ PT.
Q
P
R
S
5.8. Demonstre que uma reta paralela à base de um triângulo isósceles
e que intercepta os outros dois lados do triângulo em pontos
distintos, forma um outro triângulo isósceles
P
5.9. No triângulo PMN ao lado, MX é
bissetriz do ângulo M̂ , NX é bissetriz do
ângulo N̂ e QR passando por X, é paralelo a
MN. Mostre que os triângulos QMX e RXN
são isósceles.
99
Q
M
X
R
N
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
5.10. Mostre que se duas retas paralelas são cortadas por uma
transversal, então as bissetrizes de dois ângulos correspondentes
quaisquer são paralelas.
C
5.11. Demonstre que o ângulo CÂB mede a
metade da medida do ângulo CÔB,
considerando o desenho ao lado, onde O é A
o centro da circunferência e os pontos A, B
e C estão sobre ela.
O
B
5.12. Dados dois triângulos ABC e EFG, tal que Â Ê e B̂ F̂ , explique
porque você pode ou não concluir que:
a) Ĉ Ĝ.
b) AB EF.
S
5.13. No desenho ao lado, PR e ST são
perpendiculares a RQ e SQ é perpendicular
R
a PS. Demonstre que P̂ Q̂ .
V
T
Q
P
C
5.14. No triângulo ABC do desenho ao lado,
AĈB 90o e CD é perpendicular a AB.
Mostre que  BĈD .
A
D
B
5.15. A medida de um ângulo de um paralelogramo é 45o. Quais são as
medidas dos outros ângulos?
5.16. Dados um paralelogramo e uma diagonal, demonstre que os
segmentos perpendiculares à diagonal a partir de vértices opostos são
paralelos e congruentes.
5.17. A afirmação seguinte é verdadeira? Justifique.
100
5. Axioma das Paralelas
“Um trapézio é um paralelogramo se, e somente se, suas diagonais se
dividem ao meio”.
5.18. Seja ABCD um trapézio isósceles onde AB é uma das bases.
Mostre que  B̂ e Ĉ D̂ .
5.19. Dados um triângulo qualquer ABC e os pontos médios de cada
lado M, N e P, demonstre que o perímetro do triângulo MNP é metade
do perímetro do triângulo ABC.
5.20. Mostre que se unirmos os pontos médios dos lados consecutivos
de um losango, obtemos um retângulo.
101
Capítulo 6: Regiões Poligonais e Áreas
Neste capítulo, incluiremos no terceiro grupo de axiomas
aqueles relacionados com a medida de áreas. Para isto precisaremos
acrescentar mais três noções primitivas:
Noção Primitiva 5: Região plana.
Noção Primitiva 6: Interior de região plana.
Noção Primitiva 7: Fronteira de região plana
A idéia de colocar região plana como noção primitiva é
estabelecer um objeto matemático que determina área. Há uma
diferença essencial entre região plana e subconjunto do plano. Por
exemplo, uma reta é um subconjunto do plano mas não determina
uma área, enquanto um paralelogramo determina uma região plana (e
também é um subconjunto do plano). Assim toda região plana é um
subconjunto do plano mas não vale a recíproca. As noções de interior
e fronteira ficarão mais claras quando trabalharmos com regiões
poligonais e circulares. Estas noções são essencialmente da topologia
e nesse contexto são bem definidas o que não faz parte do conteúdo
deste trabalho.
Definição 6.1: Seja P um ponto do plano e R uma região plana. Se P
está no interior de R diremos que P é ponto interior de R. Se P está na
fronteira de R diremos que P é ponto fronteira de R. Se P não é ponto
interior e nem fronteira de R diremos que P é ponto exterior de R.
O desenho a seguir ilustra uma região plana com seu interior e
sua fronteira.
6. Regiões Poligonais e Áreas
Fronteira
Interior
Neste texto não estudaremos figuras planas deste tipo.
6.1. Regiões Poligonais
Algumas regiões planas são possíveis de serem definidas na
linguagem desse texto. Entre elas estão as regiões poligonais.
Começaremos com uma região mais simples:
Definição 6.2: Dado um triângulo, a região triangular é a região plana
determinada pelo triângulo e pelo conjunto dos pontos do plano
formado por todos os segmentos cujas
extremidades estão sobre os lados do
triângulo. O triângulo é chamado fronteira
da região triangular. O conjunto de pontos
de uma região triangular que não
pertencem a sua fronteira é chamado de
interior da região triangular.34
Desta forma, um triângulo divide o plano em duas regiões: os
pontos que pertencem à região triangular e os pontos que não
perten-cem.
Proposição 6.3: Todo polígono com n lados determina n – 2 triângulos
tais que dois quaisquer desses triângulos não possuem pontos
interiores em comum e seus vértices são os vértices do polígono.
34 Nos textos em geral não se diferencia região triangular e triângulo. Da mesma
forma que diferenciamos círculo de circunferencia, também diferenciamos aquí o triângulo da
região triangular.
103
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Demonstração: Vamos fazer a demonstração por contradição, ou
seja, suponhamos que exista pelo menos um polígono para o qual não
vale o teorema. Seja k o menor natural para o qual existe um polígono
com k
lados onde isto ocorre. Sejam P1P2Pk um
destes polígonos e r uma reta não paralela
Pi
a nenhum dos lados do polígono. A
existência desta reta está garantida pois o
polígono possui um número finito de lados.
Conside-remos P um ponto do polígono
mais distan-te de r, como r não é paralela a
nenhum lado do polígono temos que P é
r
vértice, ou seja, P = Pi, para algum i em
{1,2,,n}.
Consideremos agora os vértices adjacentes Pi–1 e Pi+1. Temos duas
possibilidades para o triângulo Pi-1PiPi+1:
1. A região triangular Pi–1PiPi+1 não contém
Pi+ 1
outros vértices de P1P2Pk e, neste caso, o
Pi
polígono P1P2Pi–1Pi+1Pk possui k–1 lados.
Como kn foi tomado para ser o menor
natu-ral para o qual o teorema não vale
Pi-1
temos que P1P2Pi–1Pi+1Pk pode ser
decomposto em k – 3 triângulos
satisfazendo as hipóte-ses do teorema.
r
Logo, o teorema será verdadeiro também para P1P2Pk pois este é obtido acrescentando o
triângulo Pi-1PiPi+1. Isto contradiz a hipótese inicial.
2. A região triangular Pi–1PiPi+1 contém
vértices de P1P2Pk distintos de Pi–1, Pi e
Pi
Pi+1. Neste caso, considere Pj o vértice mais
distante de r. Assim o segmento PiPj
Pi+ 1
Pj
decom-põe P1P2 Pk em dois polígonos P’ e
P”, onde P’ é PjPj+1Pi–1Pi e P” é P1Pj–
Pj+ 1
com k’ e k” lados,
1PjPiPj+1Pn,
respectivamente, tais que k’ + k” = k + 2.
r
Pi–1
Por outro lado, temos 2 < k’, k” < n, logo P’ e
P” podem ser decompos104
6. Regiões Poligonais e Áreas
tos em triângulos conforme as hipóteses do teorema. Logo, P1P2 Pn
pode ser decomposto em (k’ – 2)+(k” – 2) = k – 2 triângulos
satisfazendo as hipóteses do teorema, obtendo também uma
contradição. Estes dois casos concluem a demonstração do teorema.
Exemplos
6.1. No desenho ao lado, A é um ponto da
região triangular, observe que A é um
ponto interior, B é um ponto do triângulo
e, neste caso, da fronteira e C um ponto
que não está no interior e nem na fronteira.
O ponto C é dito um ponto exterior a
região triangular.
C
B
A
6.2. Um polígono é convexo quando para todo lado deste, o polígono
está contido num dos semiplanos determinado por este lado.
Qualquer triângulo é um polígono convexo. O primeiro bloco de
quatro polígonos do desenho a seguir não são convexos e o segundo
bloco são convexos.
6.3. Na Definição 2.16, ou seja, na definição de polígono, os ângulos
AiÂi+1Ai+2 são denominados ângulos internos do polígono. Vamos
mostrar que num polígono convexo de n lados a soma dos ângulos
internos é igual a (n – 2).(180º). Pela Proposição 6.3, temos (n – 2)
triângulos cuja soma de todos os ângulos internos do triângulo é igual
105
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
a soma dos ângulos internos do polígono (pois ele é convexo). Como
em cada triângulo temos a soma dos ângulos internos igual a 180 0,
obtemos (n – 2).(1800) como a soma dos ângulos internos.
Definição 6.4: Dado um polígono, a região
poligonal é a região plana determinada
pela união das regiões triangulares obtidas A
6
pela Proposição 6.3. O polígono é chamado
fronteira da região poligonal. O conjunto
de pontos de uma região poligonal que não
pertencem a sua fronteira é chamado de
A5
interior da região poligonal.
A1
A2
A3
A4
6.4. Nos desenhos a seguir temos outros exemplos de regiões
poligonais. Nos desenhos sombreados temos exemplos de regiões
que, apesar de não serem regiões poligonais de acordo com a
definição dada, aparece em outros textos como regiões poligonais,
pois suas definições são distintas dessa. Porém observamos que todas
elas podem ser vistas como união de regiões poligonais.
6.5. Nos desenhos a seguir damos exemplos de algumas regiões não
poligonais: uma região que não é um número finito de regiões
triangulares (faixa de triângulos), uma região com regiões triangulares
se interceptando e não formando um segmento ou um ponto e,
região onde não existe uma linha poligonal inteiramente contida.
106
6. Regiões Poligonais e Áreas
6.6. No desenho ao lado, temos um
polígono onde A é um ponto interior da
região poligonal, B é um ponto da fronteira
da região poligonal e C um ponto que não
está no interior e nem na fronteira da
regão poligonal. O ponto C é dito um ponto
exterior a região poligonal.
C
B
A
Algumas questões relacionadas a convexidade são
interessantes e como fogem do escopo deste livro (pois estamos
preocupados com a noção de área de regiões poligonais)
apresentaremos somente para reflexão:
1. Se um ponto A está no interior de um polígono e B está no exterior
então o segmento AB intercepta o polígono.
2. Se um ponto A está no interior de um polígono então qualquer reta
que passa por A encontra o polígono pelo menos duas vezes.
3. Um polígono é convexo se, e somente se, sua região poligonal é um
conjunto convexo.
4. Dado n IN, n 3, é sempre possível construir um polígono de n
lados?
5. Dados n pontos distintos, em que condições existe um polígono
tendo como vértice estes pontos?
107
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
6.2. Áreas
Os próximos axiomas tratam novamente de medidas; agora de
medidas de áreas, por isso os colocamos no grupo III, que é o grupo
dos axiomas de medidas.
Axioma III.5: A toda região plana R corresponde um único número real
positivo.
Definição 6.5: A área de uma região plana R, denotada por A(R) (lê-se,
área de R), é o número real dado pelo Axioma III.5.
Axioma III.6: Se uma região plana é a união de duas ou mais regiões
planas tais que duas a duas não têm pontos interiores em comum,
então sua área é a soma das áreas destas regiões.
Devemos observar que a noção de ponto interior de uma
região plana deverá estar clara. Por exemplo, no caso da região
poligonal e do círculo isto ficou bem definido e no caso duma região
plana qualquer foi considerado uma noção primitiva.
Axioma III.7: A área de um quadrado é o quadrado do comprimento
do seu lado.
A área de uma região, certamente, deve depender apenas da
forma da região e não do lugar onde a região está localizada no plano.
Para o caso de regiões poligonais, este fato segue do axioma que
colocamos no grupo dos axiomas de medidas.
Axioma III.8: Se dois triângulos são congruentes, então as regiões
triangulares determinadas por eles têm a mesma área.
Vamos agora através destes axiomas de áreas determinar
áreas de regiões poligonais mais conhecidas.
108
6. Regiões Poligonais e Áreas
Teorema 6.6: A área de um retângulo é o produto da medida de sua
base pela medida de sua altura.
Demonstração: Chamamos de A(R) a área
que queremos determinar. As áreas dos
b
dois quadrados sombreados do desenho
2
2
ao lado, são iguais a h e b pelo Axioma
III.7; e a área de todo o desenho que
também é um quadrado de lado (b + h) é h
igual a (b + h)2, pelo mesmo axioma.
b
h
A(R) b
h
A(R)
b
h
Assim, dividindo a região poligonal e aplicando o Axioma III.6, temos
que:
(b + h)2 = 2A(R) + b2 + h2 A(R) = bh.
Proposição 6.7: A área de um triângulo retângulo é a metade do
produto da medida de seus catetos.
Demonstração: Consideremos um triângur
D
lo retângulo ABC, onde A é o ângulo reto, e C
s
tracemos uma reta r paralela a AC por B e
uma reta s paralela a AB por C. Temos que r
e s se encontram num ponto D formando
um ângulo reto, posto que CD é paralela a
AB e perpendicular a AC. Logo por
B
construção temos que ABCD é um A
retângulo. Sabemos que a área
do retângulo é AB. AC, pelo Teorema 6.6. Pelo Teorema 4.3 (Caso
LAL) os dois triângulos determinados pela diagonal CB são
congruentes. Logo, pelo Axioma III.8, eles têm a mesma área. Pelo
Axioma III.6, temos,
AB. AC
A(ABCD) = AB. AC = 2.A(ABC) A(ABC) =
,
2
como queríamos demonstrar.
109
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Teorema 6.8: A área de qualquer triângulo é o semi-produto da
medida de qualquer base pela medida da altura correspondente.
Demonstração: Existem
três acutângulo retângulo obtusângulo
possibilidades a serem consideradas:
triângulos acutângu-lo, retângulo e
obtusângulo, conforme figu-ra ao lado. No
caso de triângulos acutângu-los os pés das
h
h
h
perpendiculares em relação a qualquer
base está entre os vértices desta base
(Exercício 4.11). Neste caso, utilizamos duas b1 b2
b
b
b1
vezes a Proposição 6.7 juntamente
com o Axioma III.6 e obtemos A(T1) + A(T2) = A(T), ou seja,
b .h
b .h b .h b2.h
(b b ).h b.h
A(T1)+A(T2) = 1 2 = 1
1 2
A(T).
2
2
2
2
2
O caso de triângulos retângulos é a própria Proposição 6.7. O caso
de
triângulos obtusângulos os pés das perpendiculares em relação a duas das bases se
posicionam conforme o desenho ao lado. h
Se-ja T o maior triângulo deste desenho.
T1
Sabe-mos pelo Axioma III.6 que
T2
A(T)=A(T1)+A(T2) A(T1)=A(T) – A(T2).
Como T e T2 são triângulos retângulos, pela
b
b1
Proposição 6.7, temos
b bh b1h hb1 b b1 bh ,
A(T1)= 1
2
2
2
2
como queríamos demonstrar.
Teorema 6.9: A área de um trapézio é a metade do produto da medida
da altura pela soma das medidas das bases.
110
6. Regiões Poligonais e Áreas
Demonstração: Seja A a área do trapézio
de bases b1 e b2 e altura h. Cada diagonal
divide o trapézio em dois triângulos, com
bases b1 e b2 e mesma altura h (Proposição
5.5). Pelo Axioma III.6 temos que:
1
1
1
A b1.h b2.h (b1 b2 ).h .
2
2
2
b2
h
b1
Segue do Exemplo 5.17 que a área de um trapézio é o produto
da base média pela altura do trapézio.
Corolário 6.10: A área de um paralelogramo é o produto de qualquer
base pela altura correspondente.
Demonstração: Todo paralelogramo é um
trapézio com b1 = b2 = b, assim pelo
Teorema 6.9, temos que a área do
paralelogramo é
1
A(P) (b b).h b.h .
2
b
h
b
Exemplos
6.7. Seja ABCD um trapézio com DC
paralelo a AB. No desenho ao lado, E é o
ponto médio de AB, F o ponto médio de DE
e G é o ponto médio de CE. Vamos mostrar
que a área do triângulo AFD é igual a área
do triângulo BGC. De fato, como DC //AB
temos que a altura dos triângulos ADE e
ECB relativas às bases AE e BE são A
congruentes
111
C
D
F
G
E
B
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
pela Proposição 5.5, logo A(ADE)=A(ECB). Como F é ponto médio de
DE e G é ponto médio de CE, pelo Teorema 5.12, temos que FG // DC,
logo FG // AB e portanto pela Proposição 5.5 temos que as alturas dos
triângulos AFE e BGE em relação a bases AE e EB, respectivamente,
são congruentes e, portanto, A(AFE)=A(BGE). Como
A(ADE)=A(AFE)+A(AFD) e A(ECB)=A(BGE)+(BGC)
temos A(AFD)=A(BGC), como queíamos demonstrar.
6.8. Seja ABCD um quadrilátero com diagonais AB e CD. Suponhamos
que a diagonal AB intercepta a diagonal CD no ponto médio de CD.
Vamos mostrar que a a área do triângulo ABC é igual a área do
triângulo
C
ABD. De fato, consideremos CE a altura do
triângulo ABC em relação a AB, e DF altura
F B
do triângulo ADB também em relação a AB,
como no desenho ao lado. Temos que
E P
CP̂E DP̂F , pois são ângulos opostos pelo
vértice, CP DP, por hipótese, e
D
CÊP DF̂P, pois são ângulos retos, logo o A
triângulo CEP
é congruente ao triângulo DFP, pelo Teorema 4.12 (Caso LAAo) e
portanto CE DF. Assim os triângulos ABC e ABD têm a mesma área,
pois
AB.CE AB.DF
A(ABC) =
= A(ABD).
2
2
6.3. Teorema de Pitágoras
Com o que temos de área é possível demonstrar facilmente o
famoso teorema de Pitágoras35.
35 Pitágoras de Samos nasceu por volta de 569 a.C. em Samos, Ionia e morreu por
volta de 475 a.C. Pitágoras foi um filósofo grego que fez importantes descobertas na
matemática, astronomia e na teoria musical. O teorema hoje conhecido como Teorema de
Pitágoras era conhecido pelos Babilônios 1000 anos antes de Pitágoras enunciá-lo, mas ele foi o
primeiro a demonstrá-lo.
112
6. Regiões Poligonais e Áreas
Teorema 6.11 (de Pitágoras): Em um triângulo retângulo, o quadrado
da medida da hipotenusa é igual a soma dos quadrados das medidas
dos catetos.
Demonstração: Consideremos um triângulo retângulo de catetos medindo a e b, e
c
b
hipotenusa medindo c. Tomemos um
quadrado de lado a+b. No seu interior
a
traçamos quatro triângulos retângulos com
catetos a e b sobre os lados do quadrado.
a
b
Pelo Teorema 4.3 (Caso LAL), cada um
c
b
destes quatro triângulos é congruente ao
a c
triângulo dado, ou seja, todos têm
hipotenusa com medida igual a c. O quadric
látero formado pelas quatro hipotenusas é
c
b
a
um quadrado, pois os ângulos agudos de
a
b
um
triângulo
retângulo
são
complementares.
Pelo Axioma III.6, a área do quadrado maior é igual à área do
quadrado menor mais a soma das áreas dos quatro triângulos
congruentes. Isto nos dá
1
(a b)2 c2 4. .a.b .
2
2
2
2
Portanto, a + 2ab + b = c + 2ab, donde a2 + b2 = c2.
A recíproca do teorema de Pitágoras também é verdadeira e é
apresentada a seguir:
Teorema 6.12: Se o quadrado da medida de um lado de um triângulo é
igual a soma dos quadrados das medidas dos outros dois lados, então
o triângulo é retângulo, com o ângulo reto oposto ao maior lado.
Demonstração: Consideremos um triângulo qualquer de lados a, b e x tal que a
x2 a2 b2 , tomemos um triângulo
retângulo de catetos a e b e hipotenusa c,
113
x
b
c
a
b
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
pelo Teorema de Pitágoras temos que c2 a2 b2 e portanto c = x.
Logo os triângulos são congruentes pelo Teorema 4.11 (Caso LLL) e
assim o primeiro triângulo é retângulo.
Na obra “Os Elementos” de Euclides estes dois resultados
correspondem às proposições 47 e 48 do livro I e são as últimas
proposições deste volume.
Exemplos
6.9. (Retângulo Áureo) Vamos admitir aqui que um retângulo áureo é
um retângulo ABCD que possui a seguinte construção geométrica:
Começa-se por um quadrado ABEF (em
cinza no desenho ao lado), que é dividido B
G
E
C
em dois retângulos de mesma área, pelo
segmento GH. O ponto H serve como
centro de uma circunferência cujo raio tem
a medida da diagonal EH. Traça-se o arco
de circunferên-cia (ED) e prolonga-se o A
F
H
D
segmento da base
AF até interceptá-lo. O segmento AD será a base do retângulo áureo.
Traça-se o novo lado CD em ângulo reto com a nova base,
prolongando-se o segmento BE até interceptá-lo, num ponto C
completando assim a construção do retângulo áureo. Mostraremos
que neste retângulo ABCD, se retirarmos o quadrado, o retângulo
resultante também é um
retângulo áureo. Logo, devemos mostrar
G E
C
que DCEF é um retângulo áureo. Para isto B
considere os pontos I e J nos segmentos
J
I
CD
e
EF,
respectivamente,
tais
L
K
que DF DI FJ. Por construção, FDIJ é um
quadrado. Consi-dere agora os pontos A
D
F
H
médios K e L dos segmentos DI e FJ, respectivamente. Devemos mostrar que JK CK.
Vejamos primeiramente que
114
6. Regiões Poligonais e Áreas
DF HD HF EH HF EH
2
AF
AB
EH
2
2
2
AB
AB
5AB
AB
5
AB
AB
AB
2
4
2
2
2
2
(*)
Logo , temos
DF
DF
DF
CK IK CI
CD DF CD
AB
AB
2
2
2
4 AB 5. AB AB 5 5
. AB.
4
4
Por outro lado,
2
2
5 1 AB.
2
5 1.AB
4
2
DI
DF
2
2
JK IK IJ DF DF
2
2
2
2
5DF
5
5 5 1
5 5
.DF
.
. AB
. AB
4
2
2 2
4
Portanto, CK JK, como queríamos demonstrar. Segue de (*) que
2
AB
2
1 5
e este número foi designado por Fibonacci pela
2
DF
5 1
1 5
1,6180 e é conhecido como número
2
áureo ou número de ouro e aparece de várias formas na natureza e
nas artes de uma maneira geral. Dizemos também que DF é o
AB
segmento áureo de AB e a razão
é chamada razão áurea ou divina
DF
proporção.
letra , ou seja, =
6.10. Num triângulo MOQ, temos P entre O e Q, MO OQ,
MO OP 1 e MP PQ. Vamos determinar MQ , m( Q̂ ) e m( QM̂O ).
Como MOP é
115
Geometria Plana e Espacial
isósceles temos m(O M̂ P)=m(O P̂ M)=45 º.
Assim,
m(Q P̂ M)=135o e m(P Q̂ M)=m(Q M̂ P)=22,5o.
Logo,
m(Q M̂ O) = m(Q M̂ P) + m(P M̂ O) =
=45o + 22,5o = 67,5o.
J. R. Gerônimo/V. S. Franco
M
1
O
1
2
P
Q
2
e m( Q̂ ) = m(P Q̂ M) = 22,5o. Como, PM OP OM 2 temos
PQ 2 . Logo, MQ 12 (1 2 )2 1 1 2 2 2 4 2 2 .
6.4. Exercícios
6.1. O que acontece com a área de um quadrado se seu lado é
duplicado? Triplicado? Dividido por 2?
6.2. a) Se a altura de um retângulo é duplicada enquanto a base
permanece a mesma, o que acontece com a área?
b) Se a base de um retângulo é duplicada enquanto a altura
permanece a mesma, o que acontece com a área?
c) Se a base e a altura de um retângulo são duplicadas, o que acontece
com a área?
6.3. Demonstre que se dois retângulos tem bases de mesma medida b,
então a razão entre suas áreas é igual a razão entre as medidas de
suas alturas.
6.4. a) Mostre que se dois triângulos têm bases de mesma medida b e
alturas de mesma medida h, então eles têm a mesma área.
b) Se dois triângulos têm alturas de mesma medida h, então a razão
entre suas áreas é igual à razão entre as medidas de suas bases.
6.5. Um polígono é regular quando é convexo, todos os seus ângulos
são congruentes e todos os seus lados são congruentes. Mostre que a
116
6. Regiões Poligonais e Áreas
área de um polígono regular de n lados com perímetro 2p e apótema a
é igual a p.a.
6.6. Um triângulo retângulo tem catetos medindo 18 cm e 14 cm. Um
outro triângulo retângulo tem catetos medindo 14 cm e 24 cm. Qual a
razão entre as áreas dos dois triângulos?
6.7. Em um triângulo ABC, CD é a altura relativa a AB e AE é a altura
relativa a BC.
a) Se AB 8, CD 9, AE 6 , determine BC.
b) Se AB 11, AE 5, BC 15 , determine CD.
c) Se CD h, AB c, BC a , determine AE.
6.8. Um triângulo e um paralelogramo têm áreas e medidas das bases
iguais. Qual a relação entre as medidas de suas alturas?
6.9. Demonstre que em um triângulo qualquer, uma mediana separa o
triângulo em duas regiões de mesma área.
6.10. a) Demonstre que se as diagonais de um quadrilátero convexo
são perpendiculares entre si, então a área do quadrilátero é metade
do produto dos comprimentos das diagonais.
b) Calcule a área de um losango se forem dadas as suas diagonais.
6.11. É dado um segmento AB. Mostre que para todo número real
positivo k, existe pelo menos um ponto P tal que o triângulo ABP tem
área k. Existe mais de um ponto assim? Quantos? Descreva o conjunto
de todos os pontos P que têm essa propriedade.
6.12. Se os comprimentos dos catetos de um triângulo retângulo são a
e b, calcule a altura h, relativa a hipotenusa, em termos de a e b.
117
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
6.13. Considere o desenho ao lado. Calcule
as medidas de OB, OC e OD utilizando a E
medida m dada. Se você continuar o
processo do desenho, fazendo OD̂E 90o
e DE m , quanto será a medida de OE?
Qual deve ser o comprimento do próximo
segmento traçado. Generalize o resultado.
6.14. Uma demonstração do Teorema de
Pitágoras, fazendo uso do desenho ao
lado, foi descoberta por James A.
Garfield36, antes que se tornasse presidente
dos Estados Unidos. Demonstre que a2 + b2
= c2, impondo que a área do trapézio é igual
a soma das áreas dos três triângulos. Não
se esqueça que deve ser demonstrado que
EB̂A 90o .
D
b
B
a
C
D
m C
m
B
m
O
a
m
A
E
c
c
b
A
6.15. Em um triângulo retângulo cujos ângulos agudos medem 30o e
60o e a hipotenusa mede c, quanto medem os outros dois catetos?
6.16. A medida de cada ângulo da base de um triângulo isósceles é 30o
e cada um de seus lados congruentes mede 14 cm. Qual o
comprimento da base? Qual a área do triângulo?
6.17. Um paralelogramo tem dois lados medindo 18 cm e 8 cm, e a
medida de um ângulo é 30o. Ache a área do paralelogramo.
6.18. A medida da altura de um triângulo eqüilátero é h. Calcule o
comprimento do lado e a área do triângulo em função de h.
36 James. A. Garfield nasceu em 1831 em Cuyahoga County, Ohio, USA, e morreu em
19/09/1881. Foi o vigésimo presidente dos Estados Unidos (1881). Morreu assassinado seis meses
após sua posse.
118
6. Regiões Poligonais e Áreas
6.19. Num trapézio ABCD, as medidas dos ângulos da base são  = 45 o
e B̂ = 30o, a medida de BC é 16 cm e a de DC é 5 cm. Calcule a área do
trapézio.
6.20. O segmento áureo de um segmento AB é um segmento AC tal
AB AC
que
. Construa com régua e compasso o segmento áureo de
AC BC
um segmento AB dado.
119
Capítulo 7: Semelhança de Triângulos e o
Teorema de Tales
Nosso objetivo, neste capítulo, será estudar semelhança de
triângulos e o Teorema de Tales37. A idéia envolvida nesses dois
assuntos é a de proporcionalidade38.
7.1. Sequências Proporcionais
A grosso modo, duas figuras geométricas são semelhantes se
tiverem exatamente a mesma forma, mas não necessariamente o
mes-mo tamanho. Por exemplo, duas circunferências quaisquer são
seme-lhantes; dois quadrados são sempre semelhantes; dois
triângulos equi-láteros são sempre semelhantes e, é claro, dois
segmentos quaisquer são semelhantes.
Poderíamos dizer também que duas figuras são semelhantes
se uma delas é em escala, um modelo da outra. Este procedimento é
utilizado na confecção de mapas e plantas de casas, onde precisamos
diminuir o tamanho do modelo sem perder a proporcionalidade.
Dados dois números reais x e y, a razão entre x e y é o
x
x
x
quociente . Dadas duas razões 1 e 2 , se ocorrer a igualdade
y
y2
y1
x1 x2
=
então ela é denominada proporção e as seqüências (x1,x2) e
y1 y2
(y1,y2) são denominadas proporcionais. Podemos generalizar este
conceito para uma quantidade qualquer de números reais:
37 Tales de Mileto nasceu por volta de 624 a.C. e morreu por volta de 547 a.C. em
Mileto, Ásia Menor (agora Turquia). Tales de Mileto foi o primeiro filósofo grego, cientista e
matemático conhecido. A ele é creditado cinco teoremas da geometria elementar.
38 Euclides trabalha este assunto nos livros V e VI.
7. Semelhança de Triângulos e Teorema de Tales
Definição 7.1: Dadas duas seqüências (x1,x2,,xn,) e (y1,y2,,yn,)
x x
x
de números reais positivos, se 1 = 2 == n =, diremos que as
yn
y1 y2
seqüências são proporcionais.
Exemplo
7.1. As sequências (1,2,3,4,5,...) e (3,6,9,12,15,...) são proporcionais.
Enunciaremos agora o teorema
proporciona-lidade e sua recíproca.
fundamental
sobre
Teorema 7.2: Se uma reta paralela a um lado de um triângulo
intercepta os outros dois lados em pontos distintos, então ela
determina segmentos que são proporcionais a esses lados.
Re-enunciado: No triângulo ABC do
desenho ao lado, sejam D e E pontos de AB
e AC, respectivamente, tais que DE é
paralelo a BC. Então:
AB AC
.
AD AE
A
D
E
C
Demonstração: Nos triângulos ADE e BDE B
consideremos AD e BD como as bases. Então esses triângulos têm a
mesma altura pois a altura de ADE é a distância de E a reta que
contém AD e a altura de BDE em relação a BD é a distância de E à reta
que contém BD, como rBD = rAD, as alturas são as mesmas. Portanto,
pelo item b) do Exercício 6.4, a razão de suas áreas é igual a razão
entre suas bases, e assim temos
A(BDE) BD
.
(1)
A(ADE) AD
Analogamente, se considerarmos os triângulos ADE e CDE, com bases
AE e CE, respectivamente, teremos que ambos possuem a mesma
altura (a justificativa é a mesma que nos dois triângulos anteriores) e
assim concluímos como antes que
121
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
A(CDE) CE
.
(2)
A(ADE) AE
Mas os triângulos BDE e CDE têm a mesma base DE e mesma altura,
pois por hipótese DE é paralelo a BC. Portanto pelo Exercício 6.4
temos que
A(BDE) = A(CDE).
(3)
Combinando as três equações (1), (2) e (3), obtemos que:
BD CE
.
AD AE
Pelo Exercício 7.2, segue que:
BD AD CE AE AB AC
AD
AE
AD AE
Teorema 7.3: Se uma reta intercepta dois lados de um triângulo e
determina segmentos proporcionais a estes dois lados, então ela é
paralela ao terceiro lado.
A
Re-enunciado: Sejam ABC um triângulo dado
como no desenho ao lado, D um ponto
entre A e B, e E um ponto entre A e C. Se
AB AC
, então DE é paralelo a BC.
D
E
AD AE
Demonstração: Seja BC’ a reta por B paraC’
lela a DE, interceptando AC num ponto C’. B
C
AB AC'
AB AC
Pelo Teorema 7.2, temos
, mas por hipótese
,
AD AE
AD AE
AC' AC
donde
e assim AC' AC. Como C’ está na semi-reta SAC
AE AE
temos pelo Corolário 3.5, que C = C’ e assim DE é paralelo a BC.
122
7. Semelhança de Triângulos e Teorema de Tales
7.2. Teorema de Tales
Agora podemos enunciar e demonstrar um teorema que tem
mais de 2600 anos, o famoso Teorema de Tales. Aqui faremos apenas
o caso de um feixe de retas paralelas cortadas por um feixe de reta
transversais.
Teorema 7.4 (de Tales): Se três ou mais paralelas são cortadas por duas
transversais, os segmentos determinados nas duas transversais são
proporcionais.
Re-enunciado: No desenho ao lado se as
t
t’
transversais t e t’, interceptam as paralelas
A
A’ r
r, s e u em A, B, C e A’, B’ e C’,
B
B’ s
AB A' B'
respectivamen-te, então
.
BC B' C'
C
C’ u
Demonstração: Consideremos o triângulo
ACC’, como BB’ // CC’, pelo Teorema 7.2, teAB AD
mos
(1), onde D = AC’ BB’. Consideremos agora o
BC DC'
AD A' B'
triângulo AA’C’, como AA’//DB’, temos pelo Teorema 7.2,
DC' B' C'
AB A' B'
(2). Portanto, de (1) e (2) temos:
. De maneira análoga, se
BC B' C'
demonstra para o caso com mais de três retas.
Teorema 7.5: (da Bissetriz Interna): Num triângulo qualquer, a
bissetriz de um ângulo interno intercepta o lado oposto num ponto tal
que as medidas dos segmentos obtidos e as medidas dos lados
adjacentes ao ângulo formam seqüências proporcionais.
123
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Re-enunciado: No desenho ao lado se ABC
é um triângulos e SA é a bissetriz do ângulo
m n
A, então
ou, equivalentemente,
b c
m b
.
n c
Demonstração: Tracemos por B, a reta
paralela a bissetriz SA, obtendo como interseção com a reta CA o ponto D. Teremos =,
pois são alternos internos e = , pois são
correspondentes. Logo, = e o triângulo
ABD é isósceles de base BD. Assim,
AD AB c . Como a reta BD é paralela a
SA, por construção, aplicamos o Teorema
7.2, obtendo o resultado desejado.
D
A
b
c
SA
m
C
n
B
a
D
A
b
c
SA
m
C
n
a
B
Se considerarmos a bissetriz de um ângulo externo em
triângu-los escaleno obteremos um resultado similar. Deixamos como
exercício a demonstração deste caso (Exercício 7.13).
7.3. Semelhança
Vamos agora definir semelhança de triângulos.
Definição 7.6: Dois triângulos ABC e DEF, são ditos semelhantes, se
existir uma função bijetora f: {A,B,C} {D,E,F}, que leva os vértices de
um, nos vértices do outro, de tal modo que os ângulos
correspondentes sejam congruentes e os lados correspondentes
formem uma seqüência proporcional, ou seja,
m(Â) = m( f (A) ), m( B̂ ) = m( f (B) ), m( Ĉ ) = m( f (C) ),
AB
BC
AC
.
f (A)f (B) f (B)f (C) f (A)f (C)
124
7. Semelhança de Triângulos e Teorema de Tales
Neste caso, denotaremos por ABC ~ DEF onde se lê: o triângulo ABC é
semelhante ao triângulo DEF. As razões dadas pelas proporções acima
são denominadas razão de semelhança.
Exemplo
7.2. Dois triângulos congruentes são semelhantes pois existirá uma
correspondência biunívoca onde ângulos correspondentes são
congruentes. Como os lados correspondentes são congruentes então
formam uma seqüência proporcional de razão 1. A recíproca não é
verdadeira, basta considerar os triângulos retângulos de lados 3, 4 e 5
e lados 6, 8 e 10. Conforme veremos, estes dois triângulos são
semelhantes.
Proposição 7.7: A semelhança de triângulos é uma relação de
eqüivalên-cia.
Demonstração: Devemos mostrar que a semelhança de triângulos é
uma relação reflexiva, simétrica e transitiva. De fato:
a) Reflexiva: como todo triângulo é congruente a ele mesmo, então
ele é semelhante a si mesmo, com razão 1 entre seus lados.
AB BC AC
b) Simétrica: Se ABC é semelhante a EFG então
, pelo
EF FG EG
EF FG EG
Exercício 7.1 temos que
, logo EFG é semelhante a ABC,
AB BC AC
e portanto a semelhança satisfaz a propriedade simétrica.
c) Transitiva: Se ABC é semelhante a DEF e a razão de semelhança
AB BC AC
R . Logo,
entre seus lados é 1. Então
DE EF DF
AB
1. DE
,
R
BC
2. EF
e
R
125
Geometria Plana e Espacial
3. DF
J. R. Gerônimo/V. S. Franco
AC
.
R
Mas se DEF é semelhante a GHI então
DE EF DF
P, substituindo
GH HI GI
AB BC AC
AB BC AC
P.R .
(1), (2) e (3), temos R R R P, logo
GH HI GI
GH HI
GI
Assim, ABC é semelhante a GHI com razão PR entre seus lados. Logo a
semelhança de triângulos é uma relação de eqüivalência.
Teorema 7.8: Dada uma correspondência entre dois triângulos, se os
ângulos correspondentes são congruentes, a correspondência é uma
semelhança.
Demonstração: Sejam ABC e EFG os dois
A
triângulos correspondentes. Queremos
AB AC BC
mos-trar que
. Vamos
EF EG FG
G’
F’
demonstrar a primeira dessas igualdades, a
demonstra-ção da outra é análoga. Sejam
C
B
F’ e G’ pontos de AB e AC respectivamente,
E
tal que AF’ EF e AG’ EG. Por LAL, temos
que AF’G’ EFG. Logo temos que
AF̂' G' EF̂G, mas por hipó-tese EF̂G AB̂C,
F
G
segue-se
que
Vamos
AF̂' G' AB̂C.
considerar dois casos.
a) Se F’ = B. Então os dois triângulos dados são congruentes e,
portanto, semelhantes.
b) Se F’ é diferente de B, então F’G’ e BC são paralelos como visto no
Exemplo 5.4, e assim pelo Teorema 7.2, temos o desejado.
Corolário 7.9: Se existe uma correspondência entre dois triângulos
tais que dois pares de ângulos correspondentes são congruentes,
então a correspondência é uma semelhança.
126
7. Semelhança de Triângulos e Teorema de Tales
Demonstração: Dados dois triângulos ABC
e EFG, sabemos pelo Teorema 5.6 que
(1)
 B̂ Ĉ 180o
e
(2).
Ê F̂ Ĝ 180o
Por hipótese, suponhamos que Â Ê e
B̂ F̂ , portanto m(Â) m(B̂) m(Ê) m(F̂) .
C
G
A
F
BE
Assim de (1) e (2) temos Ĉ Ĝ. Daí, pelo Teorema 7.8, os triângulos
ABC e EFG são semelhantes
Teorema 7.10: Dada uma correspondência entre dois triângulos. Se
dois pares de lados correspondentes são proporcionais e os ângulos
que eles determinam, congruentes, então a correspondência é uma
semelhança.
Re-enunciado: Dados dois triângulos ABC e EFG e uma correspondênAB AC
cia ABC EFG, se
e  Ê, então ABC ~ EFG.
EF EG
Demonstração: Sejam F’ e G’ pontos de
AB e AC respectivamente, tais que AF’ é
congruente a EF e AG’ é congruente a EG.
Por LAL os triângulos AF’G’ e EFG são
F’
congruentes, e assim, pela hipótese
AB AC
teremos que
. Portanto pelo B
AF' AG'
Teorema 7.3, F’G’ é paralelo a BC. Logo
AB̂C AF̂' G' (como F’G’//BC, eles são
ângulos correspon-dentes). Como o vértice
A é comum aos dois triângulos, temos pelo
Corolário 7.9 que ABC ~ AF’G’. Logo pela F
Proposição 7.7 temos o desejado.
A
G’
C
E
G
127
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Teorema 7.11: Dada uma correspondência entre dois triângulos. Se os
lados correspondentes são proporcionais, então a correspondência é
uma semelhança.
Re-enunciado: Dados dois triângulos ABC e EFG e uma correspondênAB AC BC
cia ABC EFG, se
, então ABC ~ EFG.
EF EG FG
A
Demonstração: Sejam F’ e G’ pontos de AB
e AC respectivamente, tais que AF’ EF e
AB AC BC
AG’ EG. Suponhamos que
, F’
G’
EF EG FG
AB AC
C
então temos
. Nos triângulos B
AF' AG'
E
ABC e AF’G’ o ângulo  é comum, logo
temos ABC ~ AF’G’, pelo Teorema 7.10.
F' G' AF'
G
Portanto,
,
ou
seja, F
BC AB
AF'
EF
BC.
.
F' G' BC.
AB
AB
EF
Mas, por hipótese, FG BC.
e assim, FG F’G’. Logo, AF’G’ EFG,
AB
pelo caso LLL. Portanto, pelo Exercício 7.4, temos ABC ~ EFG.
7.4. Exercícios
7.1. Demonstre que na Definição 7.1, não interessa a ordem em que as
duas seqüências aparecem, se (a,b,c,...) e (p,q,r,..). ou (p,q,r,...) e
(a,b,c,...).
7.2. Dado
a b
a b p q
a b p q
, conclua que
e que
.
p q
b
q
b
q
128
7. Semelhança de Triângulos e Teorema de Tales
a b
, então b é chamado a
b c
média geométrica entre a e c. Calcule a média geométrica entre os
números 24 e 6.
7.3. Se a, b e c são números positivos e
7.4. Mostre que se um triângulo ABC é congruente a um triângulo DEF
e o triângulo DEF é semelhante a um triângulo GHI, então os
triângulos ABC e GHI são semelhantes.
7.5. Demonstre que se num triângulo ABC, D e E são pontos médios de
AC e BC, respectivamente, então CDE ~ CAB.
7.6. Demonstre que o triângulo cujos vértices são os pontos médios
dos lados de um triângulo dado, é semelhante a este.
7.7. Dado um trapézio ABCD, seja E o encontro de suas diagonais.
Mostre que se AED ~ BEC e AEB ~ DEC, então AD BC.
7.8. Mostre que, se uma reta, paralela a um lado de um triângulo,
interceptar os outros dois lados em pontos distintos, então ela
determina um triângulo semelhante ao triângulo dado.
7.9. Demonstre que duas alturas correspondentes de triângulos
semelhantes estão na mesma razão que os lados correspondentes.
7.10. No desenho ao lado tem-se que RP é
paralelo a SQ, mostre que:
a) PRV ~ SQV;
R
b) RV.VS PV.VQ
S
V
Q
P
7.11. Demonstre que duas medianas quaisquer de dois triângulos
semelhantes estão na mesma razão que os lados correspondentes.
7.12. Se a seguinte afirmação for verdadeira, demonstre-a, se for falsa,
dê um contra-exemplo.
“Dada uma correspondência entre dois triângulos, tal que os
comprimentos de dois lados de um dos triângulos são
proporcionais aos comprimentos dos lados correspondentes
do outro triângulo e o ângulo oposto a um dos lados de um
129
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
dos triângulos é congruente ao ângulo correspondente do
outro triângulo, então os triângulos são semelhantes.”
7.13. (Teorema da Bissetriz Externa) Num triângulo escaleno, a
bissetriz de um ângulo externo intercepta o lado oposto num ponto
tal que as medidas dos segmentos obtidos e as medidas dos lados
adjacentes ao ângulo formam seqüências
A
proporcio-nais.
Re-enunciando: No desenho ao lado SAD é
c
b
a bissetriz externa ao ângulo  do
a m c
trângulo escaleno ABC, então
m
.
D
B a C
m
b
7.14. Um triângulo tem lados 6, 12 e 16. A bissetriz do maior ângulo
interno e do menor ângulo externo interceptam a reta contendo o
lado oposto nos pontos X e Y, respectivamente. Determine as
distâncias de X e Y ao vértice do menor ângulo do triângulo.
7.15. Mostre que em qualquer triângulo retângulo, a altura em relação
à hipotenusa separa o triângulo em dois triângulos semelhantes entre
si e semelhantes ao triângulo original.
7.16. É dado um triângulo retângulo e a altura em relação a
hipotenusa. Mostre que:
a) A altura é a média geométrica dos segmentos que ela determina
sobre a hipotenusa (projeções dos catetos).
b) Cada um dos catetos é a média geométrica entre a hipotenusa e a
sua projeção sobre a hipotenusa.
7.17. A altura em relação à hipotenusa de um triângulo retângulo,
separa a hipotenusa em dois segmentos cujos comprimentos são r e s
(projeções dos catetos). Demonstre que a área do triângulo é igual ao
produto da média geométrica de r e s pela média algébrica de r e s.
7.18. Se dois triângulos são semelhantes, a razão de suas áreas é o
quadrado da razão de dois lados correspondentes quaisquer.
130
7. Semelhança de Triângulos e Teorema de Tales
7.19. Um lado de um de dois triângulos semelhantes, é cinco vezes
maior que o lado correspondente do outro. Se a área do triângulo
menor é 6 cm2, qual é a área do maior?
7.20. Num triângulo ABC, D é um ponto de AC, tal que AD 2.CD. Se E
é um ponto em BC, tal que DE é paralelo a AB, compare as áreas dos
triângulos CDE e ABC. Se A(ABED)= 40 cm2, determine a área de ABC.
131
Capítulo 8: Circunferência e Círculo
Vimos no Capítulo 3 os conceitos de circunferência e círculo,
respectivamente. Nos capítulos anteriores foram propostos alguns
exercícios envolvendo estas duas figuras geométricas, mas devido a
importância destes dois conceitos na matemática, daremos um
tratamento especial para eles neste capítulo.
Definição 8.1: Duas ou mais circunferências
com o mesmo centro são ditas
concêntricas. No desenho ao lado, temos
três circun-ferências concêntricas com
centro em O e raios r1, r2 e r3 .
Definição 8.2: Uma corda de uma circunferência, é um segmento cujas extremidades
estão na circunferência. No desenho ao
lado, o segmento AB é uma corda. Uma
reta que intercepta a circunferência em
dois pontos é chamada secante. No
desenho ao lado, a reta r = AB é uma reta
secante à circunferência.
r3
r1
.
O r
2
.
r
B
.
A
É claro que toda corda determina uma secante e toda secante
determina uma corda.
Definição 8.3: Um diâmetro de uma circunferência é uma corda que contém o centro.
No desenho ao lado, o segmento BC é um
diâmetro. Um raio de uma circunferência é .
um segmento cujas extremidades são o B
cen-tro e um ponto sobre a circunferência.
No desenho ao lado, o segmento OA é um
raio. O ponto A é chamado extremidade
.
A
.
O
.
C
8. Circunferência e Círculo
final do raio OA.
É usual chamar de raio a medida do raio. Por esse motivo, se a
medida do raio de uma circunferência é r, também é usual chamar a
medida do diâmetro o diâmetro dessa circunferência de 2r.
Proposição 8.4: Numa circunferência, se um raio é perpendicular a
uma corda então ele intercepta a corda no seu ponto médio.
Demonstração: Seja O o centro de uma circunferência e OA um raio
perpendicular em M a uma corda BC
confor-me desenho ao lado. Temos que OB
B.
e OC são raios e, portanto, por definição,
têm as mês-mas medidas, logo são
congruentes. Assim o triângulo OBC é
.
A M.
O
isósceles e então temos OB̂M OĈM .
Temos também, por hipótese que
OM̂B OM̂C. Logo, pelo Teorema 4.12
(Caso LAAo), temos que os triângulos OBM
e
OCM são congruentes, e assim BM CM.
.
C
A recíproca desta proposição é verdadeira? Nem sempre, pois
nas cordas que são diâmetros todos os raios interceptam no ponto
mé-dio e somente um é perpendicular. Podemos estabelecer a
recíproca para o caso em que as cordas não são diâmetros:
Proposição 8.5: Numa circunferência, se um raio intercepta uma corda
(que não é diâmetro) no seu ponto médio então ele é perpendicular a
corda.
Demonstração: Seja O o centro de uma circunferência e OA um raio
interceptando uma corda BC no ponto médio M. Logo, BM CM, OB
e OC são raios. Assim, OB OC e então OBC é um triângulo isósceles
(note que é um triângulo pois a corda não é diâmetro). Logo, OM é
uma mediana e, pelo Teorema 4.6, OM é altura de OBC. Portanto, OA
é per-pendicular a corda BC.
133
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
8.1. Tangentes
Um outro conceito importante relacionado a circunferência é
a reta tangente:
Definição 8.6: Uma tangente a uma circunferência é uma reta que
intercepta a circunferência em um único ponto. Esse ponto é
chamado ponto de tangência ou ponto de contato. Neste caso
dizemos que a reta e a circunferência se tangenciam nesse ponto.
A próxima proposição garante a existência da tangente.
Proposição 8.7: Uma reta perpendicular a um raio de uma circunferência na sua extremidade final é tangente a mesma.
Demonstração: Consideremos uma circunferência de
uma reta perpendicular ao raio OA em A. Queremos
nenhum
ponto de r além do ponto A está na
circunferência. Seja B um outro ponto de r.
Pelo Corolário 4.23, o segmento de menor
medida de O a r é o segmento perpendicular. Logo, OB OA, ou seja a distância de B
ao centro O é maior do que o raio da
circun-ferência. Portanto, B está no
exterior da circunferência. Como B é um
ponto qual-quer de r distinto de A, temos o
desejado.
centro O e r
mostrar que
.B
.
O
.A
r
A recíproca deste resultado também é verdadeira, ou seja,
temos:
134
8. Circunferência e Círculo
Proposição 8.8: Toda tangente a uma circunferência é perpendicular
ao raio que contém o ponto de tangência.
Demonstração: Consideremos uma circunferência de centro O, e t
uma reta que lhe seja tangente. Chamemos de T o ponto de
tangência.
Seja agora O’ o pé da perpendicular
t
baixada pelo ponto O à reta t. Queremos
.R
mostrar que O’ e T coincidem. Caso isso
não ocorra, pelo Corolário 4.23, OO’ tem
medida menor que OT. Tomemos na semi. O’
.
reta oposta a SO’T um ponto R, tal que O’R
O
O’T (veja desenho ao lado). Então os
triângulos OO’R e OO’T são congruentes
.
T
pelo Teorema 4.3 (Caso LAL) pois OO’ é
comum aos dois triângulos
e, por construção, O' R O' T e m(OÔ’R) = m(OÔ’T) = 90o. Assim,
OR OT e, portanto, t intercepta a circunferência em dois pontos, e
isso contradiz a definição de reta tangente. Logo, nossa hipótese é
falsa.
Definição 8.9: Duas circunferências são tangentes se elas são
tangentes à mesma reta no mesmo ponto. Se duas circunferências
tangentes são tais que os seus centros estão no mesmo semiplano
determinado pela sua tangente comum, então elas se tangenciam
internamente. Se duas circunferências tangentes são tais que os seus
centros estão em semiplanos opostos em relação a tangente comum,
então elas se tangenciam externamente.
Tangentes internas
135
Tangentes externas
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Proposição 8.10: Se uma reta s intercepta o interior de uma
circunferência C, então ela intercepta a circunferência em dois e
somente dois pontos.
s
Demonstração: Seja C uma circunferência
.X
de centro O e raio r como no desenho ao
r .A
lado. Sejam s uma reta e A um ponto de s
q .
no interior de C, que existe por hipótese.
O’
O.
Então OA r , por definição de círculo. Seja
r
O’ o pé da perpendicular a s passando por
.
O, e chamemos OO' de q. Pelo Corolário
X’
4.23,
q OA r . Assim, pelo Axioma IV.1, existe X na semi-reta SO’A tal que
O' X r 2 q2 . Como X está em s, o triângulo OO’X é retângulo em
O’, e assim, pelo teorema de Pitágoras,
2
2
OX q2 O' X q2 (r 2 q2 ) r 2 .
Logo X está em C por definição. Novamente pelo Axioma IV.1, existe
na outra semi-reta determinada por O’, um ponto X’ com as mesmas
características de X. Pelo Corolário 3.5, os pontos X e X’, são os dois
únicos pontos de s tal que a distância até O’ é igual a
segue o resultado.
r 2 q2 donde
Com este resultado temos que só existem três posições
distintas entre uma reta e uma circunferência, a saber, a reta não
intercepta a circunferência (a interseção é vazia), a reta e a
circunferência são tangentes (a interseção é um ponto) e a reta e a
circunferência são secantes (a interseção são dois pontos).
136
8. Circunferência e Círculo
8.2. Ângulo Inscrito
Definição 8.11: Um ângulo central de uma
circunferência é um ângulo cujo vértice é o
centro da circunferência. Veja desenho ao
lado.
.
O
Definição 8.12: Seja C uma circunferência de centro O e sejam A e B,
pontos em C. Tracemos a reta que passa por estes dois pontos. Ela separa o plano em dois semiplanos. Cada um
destes semiplanos contém uma parte da
circunferência que são denominados arcos
determinados pelos pontos A e B, que
.
.
.
B
A
denotaremos por AB . Quando A e B são
O
extremidades de um diâmetro, estes arcos
são denominados semi-circunferências
(desenho ao lado). Quando a corda AB não
semi-circunferências
é
um diâmetro, distinguimos os dois arcos
A .arco menor
determinados por A e B, do seguinte modo: o
arco que fica no semiplano determinado
pela reta AB, contrário daquele que se
.
encontra o centro O da circunferência é
O
chamado arco menor e o outro arco, ou
.B
seja, aquele que se localiza no mesmo semiplano que O, chamaremos de arco maior.
arco maior
Veja o desenho ao lado39.
Definição 8.13: A medida em graus do arco menor AB , denotada por
m( AB ), é a medida em graus do ângulo central AÔB.
Como conseqüência da
Definição 8.13 temos que se AB é um diâmetro, a medida de
AB é 180o.
39
Utilizaremos a mesma notação para arco menor e arco maior e, para não haver
ambi-guidades, mencionaremos o arco a qual estamos nos referindo.
137
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Definição 8.14: Um ângulo se denomina
inscrito num círculo determinado por uma
circunferência C, de centro O e raio r, se
seu vértice V está em C e seus lados
interceptam C em dois pontos A e B
distintos de V (ver desenho ao lado). Os
pontos A e B determi-nam dois arcos. O
arco que não contiver o vértice V é
chamado arco correspondente ao ângulo
inscrito dado. Diremos também
que o ângulo subtende o arco AB .
.A
V.
.
O
.
B
Proposição 8.15: A medida do ângulo inscrito em um círculo é a
metade da medida do arco correspondente, ou seja, pela
Definição 8.13, a medida do ângulo inscrito em um círculo é a metade
da medida do ângulo central correspondente.
Demonstração: Na verdade, a demonstração desta proposição já foi proposta no
Exemplo 5.10 e no Exercício 5.11, faltando
apenas analisar o caso do ângulo inscrito A .
BÂC do desenho ao lado. Pelo Exemplo
5.10, temos
1
1. m(BÂD) m(BÔD) e
2
1
2. m(CÂD) m(CÔD) .
2
Mas pelo Axioma III.4, temos
3. m(BÂC) m(BÂD) m(CÂD) e
B
.
.C
.
O
D
4. m(BÔC) m(BÔD) m(CÔD) .
1
1
Substituindo (1) e (2) em (3), temos: m(BÂC) m(BÔD) (CÔD) , ou
2
2
1
1
seja, m(BÂC) m(BÔD) m(CÔD) , e, por (4), m(BÂC) m(BÔC) ,
2
2
como queríamos demonstrar.
138
8. Circunferência e Círculo
Corolário 8.16: Todos os ângulos inscritos que subtendem um mesmo
arco têm a mesma medida. Em particular, todos os ângulos que
subtendem uma semicircunferência são retos.
.
V3
V2.
V1
.
A
.
.
.
.
.
O
B
m(V̂1) m(V̂2 ) m(V̂3 )
Demonstração: Imediata da Proposição 8.15.
Consideremos agora uma circunferência C de centro O e raio r. Consideremos
também um ponto P (exterior ou interior)
conforme os desenhos ao lado. Seja s uma
secante qualquer conduzida pelo ponto P, .
e sejam A e B os pontos onde essa secante P
encontra a circunferência. Tracemos por P
e O uma outra secante e chamemos de A’ e
B’ a interseção desta secante com C.
Quando P é exterior ao círculo
determinado por C, te-mos o primeiro caso
no desenho ao lado. Quando P é interior,
temos o segundo caso no desenho ao lado.
B
.
s
A.
.
O
A’
B’
primeiro caso
. s
B
.
A’ . P
A
O
.
.
B’
Teorema 8.17: (Potência de Ponto): Para o
mesmo
par
invariante
“pontosegundo caso
circunferêcia”,
o produto PA. PB independe da secante que se traça pelo ponto P,
pois qualquer que seja a secante escolhida, esse produto é igual ao
valor constante PA'. PB' . Esse produto PA' . PB' constante, recebe o
nome de potência do ponto P relativa a circunferência C.
139
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Demonstração: A demonstração a seguir vale tanto para o primeiro
caso, quanto para o segundo caso do desenho acima. Pelo Corolário
8.16 temos que A'B̂A ~ AB̂' A' . Temos também que A'P̂B AP̂B' (no
primeiro caso eles coincidem e no segundo eles são opostos pelo
vértice). Assim pelo Teorema 7.8, os triângulos PA’B e PAB’ são
semelhantes. Segue que:
PA' PB
,
PA PB'
e assim PA.PB PA'.PB' . Como a secante s, foi escolhida arbitrariamente em ambos os casos, temos o desejado.
Proposição 8.18: Se os dois lados de um ângulo de vértice P são
tangentes a uma circunferência nos pontos A e B, então:
a) a medida do ângulo P̂ é igual a 180o menos a medida em graus do
arco AB .
b) PA PB.
Demonstração: Seja O o centro da circunferência. No quadrilátero OAPB, do
desen-ho
ao
lado,
temos
que
o
m(Â) m(B̂) 90 pela Proposição 8.8.
Assim,
pelo
Corolário
5.7.d,
o
m(P̂) m(Ô) 180 . Como m(AÔB) é, por P
de-finição, a medida de AB , fica
demonstrado o item a). O Teorema 4.17,
mostra que os triângulos APO e BPO são
congruentes, donde segue o item b).
140
A
O
B
8. Circunferência e Círculo
Definição 8.19: Um polígono é inscrito numa circunferência se os
vértices do polígono estão na circunferência. Se os lados do polígono
são tangentes à circunferência, então o polígono é circunscrito à circunferência.
polígono inscrito
(hexágono)
polígono circunscrito
(quadrilátero)
Proposição 8.20: Todo triângulo está inscrito numa circunferência.
r
C
Demonstração: Seja ABC um triângulo.
s
Trace as mediatrizes r e s dos lados AB e
BC. Chamemos de M o ponto médio de AB
O N
e N o ponto médio de BC. Seja O a interseção de r e s. Afirmamos que O é o centro da
circunferência que passa por A, B e C. De
B
A
M
fato, temos que A, B e O determinam um
triângulo, como r passa pelo ponto médio
M
de AB obtemos dois triângulos retângulos, que são congruentes (Caso
LAL), ou seja, AMO BMO, assim AO BO. Da mesma forma, B, C e O determinam um triângulo. Sendo N ponto médio de BC, temos BNO CNO,
também por LAL. Logo BO CO e, portanto, AO BO CO. Assim O
está eqüidistante de A, B e C. Logo, O é o ponto procurado. Temos
então uma circunferência de raio AO que passa A, B e C.
Corolário 8.21: As mediatrizes dos lados de um triângulo se encontram
num único ponto denominado circuncentro.
Demonstração: Pelo ponto O da demonstração da Proposição 8.20,
trace a única perpendicular a AB, que intercepta AB no ponto P.
141
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Temos que OP é altura relativa a base do triângulo isósceles OAB e,
portanto, pelo Exemplo 4.10, a reta OP é a mediatriz de AB.
Proposição 8.22: Todo triângulo possui uma circunferência inscrita.
Demonstração: Seja ABC um triângulo. Trace as bissetrizes dos
ângulos  e B̂ . Estas bissetrizes se encontram num ponto que
denominaremos I. Pelo ponto I, trace perpendiculares aos lados AB,
BC e CA, que chamaremos E, F e G, respectivamente. Queremos
mostrar que
IE, IF e IG são congruentes, e assim como
A
três
pontos
determinam
uma
circunferência, e esses segmentos são
perpendiculares aos lados do triângulo,
G
teremos o resultado. Pelo Teorema 4.12
E
(Caso LAAo), temos que os triângulos AEI e
I
AGI são congruentes e assim IE é
congruente a IG. Pelo mesmo teorema,
C
B
F
temos que os triângulos BEI e BFI
são congruentes e assim IE é congruente a IF, donde segue o
resultado.
Corolário 8.23: As bissetrizes de um triângulo encontram-se num
único ponto denominado incentro.
Demonstração: Pela demonstração da
Proposição 8.22, temos que IF IG, os
triân-gulos ICF e ICG são retângulos e tem o
lado IC em comum. Assim, pelo Teorema
4.17, temos IFC IGC, donde segue que
GĈI FĈI e portanto a bissetriz de Ĉ passa
por I.
C
F
G
I
A
B
142
8. Circunferência e Círculo
Exemplos
8.1. Nenhuma circunferência contém três pontos colineares. De fato,
suponhamos que A, B e C são pontos colineares pertencentes a
circunferência, assim pelo Exercício 8.12, a mediatriz de AB passa por
O, bem como a mediatriz de BC. Como A, B e C são colineares, temos
que as mediatrizes de AB e BC são paralelas, o que é um absurdo.
Logo não existe três pontos colineares em uma mesma circunferência.
8.2. Três pontos não colineares pertencem a uma circunferência. De
fato, sejam A, B e C três pontos não colineares, logo eles determinam
um triângulo e o resultado segue da Proposição 8.20.
8.3. Dado um arco de circunferência AB , vamos apresentar um
procedimento para encontrar o centro e o raio da circunferência.
Basta marcar três pontos arbitrários C, D e E do arco AB e encontrar o
circuncentro do triângulo CDE conforme demonstração da Proposição
8.20.
Proposição 8.24: Um quadrilátero pode ser inscrito em uma circunferência se, e somente se, possui um par de ângulos opostos
suplementa-res.
Demonstração: Suponhamos
primeiramen-te que ABCD é um
quadrilátero inscrito numa circunferência,
devemos mostrar que m(Â) m(Ĉ) 180o e
m(B̂) m(D̂) 180o . Vamos mostrar em
A
D
O
primeiro lugar que m(Â) m(Ĉ) 180o . Se
C
B
BD é um diâmetro, então pelo Corolário
8.16 Â e Ĉ são ângulos
retos e assim m(Â) + m( Ĉ ) = 180o. Caso contrário, temos que BD
determina dois arcos na circunferência. Suponhamos, sem perda de
generalidade, que A e O se localiza no mesmo semi-plano
determinado pela secante BD. Assim, pela Proposição 8.15, m(Â) =
m( BD )/2. Seja E tal que a corda DE é um diâmetro. Assim temos que
m( DE ) = 180o= m( DB ) + m( BE ),
143
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
ou seja,
m(Â) = m( BD )/2 = 90o – m( BE )/2.
Por outro lado, pelo Corolário 8.16,
m(Ĉ) = m( DE )/2 + m( BE )/2 = 90o + m( BE )/2.
Logo, m(Â) + m(Ĉ) = 180o. Mostremos agora que m(B̂) m(D̂) 180o ,
sabemos que
m(Â) m(B̂) m(Ĉ) m(D̂) 360o .
Como m(Â) m(Ĉ) 180o , temos que m(B̂) m(D̂) 180o . Reciprocamente, suponhamos que um quadrilátero ABCD tem um par de
ângulos opostos suplementares. Como a soma dos ângulos internos
do quadrilátero é 360o, então o outro par de ângulos opostos também
é suplementar. Trace uma circunferência pelos pontos
A, B e C, que existe pela Proposição 8.22. O
B
ponto D pode estar no exterior do círculo,
sobre a circunferência ou no interior do
A
círculo. Se D estiver no exterior do círculo,
una D com B. Este segmento encontra a
circunferência num ponto E. Pela primeira
C
parte da demonstração temos que
E
m(AB̂C) m(AÊC) 180o e, por hipótese,
m(AB̂C) m(AD̂C) 180o .
D
Logo,
m(AÊB) m(AD̂B) e m(BÊC) m(BD̂C)
AD̂C AÊC. Mas
(ângulos externos) e então,
m(AÊC) m(AÊB) m(BÊC) m(AD̂B) m(BD̂C) m(AD̂C) .
Assim, D não pode estar no exterior do círculo. Se D estiver no interior
da circunferência. Seja E ponto de interseA
ção de rCD e a circunferência c. Assim
B
temos que
m(Ê) m(B̂) 180º .
O
Por hipótese temos que
E D
m(B̂) m(D̂) 180º ,
C
logo
m(B̂) m(Ê) m(B̂) m(D̂)
144
8. Circunferência e Círculo
e, portanto, Ê D̂ , o que é um absurdo, pois D̂ é um ângulo externo
ao triângulo ADE. Logo, D=E e, portanto, ABCD é inscritível.
No Exercício 6.5 foi dada a definição de polígono regular.
Veremos agora que podemos construir polígonos regulares40 com
qualquer número de lados. De fato, construímos uma circunferência
de centro O e raio r.
Divide-se a circunferência em n arAn
A1
cos congruentes. Isto nos fornece um polígono A1A2...An convexo. Os lados são conA2
gruentes pois determinam arcos congruen- A6
O
tes. Pelo caso LLL os triângulos AiAi+1O é
congruente ao triângulo AkAk+1O ou ao
A3
triângulo A1AnO, para todo i, k=1,..., n – 1,
A5
A4
logo os ângulos Â1, Â2, ..., Ân são congruentes.
Assim o polígono A1A2...An é regular. Vamos utilizar os
polígonos regulares no estudo das áreas e todos os polígonos
regulares a que vamos nos referir serão construídos pelo método que
acabamos de descrever. Esta construção nos permite apresentar os
seguintes elementos do polígono:
Definição 8.25: O centro O da circunferência é chamado centro do
polígono. Como todos os triângulos isósceles do desenho dado são
congruentes, eles tem mesma base ln e mesma altura a. A altura a é
chamada apótema do polígono.
O fato que todo polígono regular pode ser construído dessa
forma, ou seja, que todo polígono regular é inscrito em uma
circunferência é apresentado a seguir.
Proposição 8.26: Todo polígono regular está inscrito em uma circunferência.
40 A construção a que estamos nos referindo pode se utilizar de métodos
aproximados, régua e compasso. De uma maneira geral, tem-se resultados sobre construções
geométricas mediante o uso de somente de régua e compasso e, neste caso, só é possível a
construção de alguns polígonos regulares.
145
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Demonstração: Seja A1A2...An um polígono regular. Tracemos a
circunferência que passa pelos pontos A1, A2 e A3 . Seja O o centro
desta circunferência. Como OA2 e OA3 são congruentes, então o
triângulo OA2A3 é isósceles e portanto OÂ2A3 OÂ3A2. Como o polígono é
regular, todos os seus ângulos internos têm a mesma medida.
Portanto A1Â2A3 A2Â3A4. Mas então OÂ2A1 OÂ3A4. Como num
polígono regular os lados são congruentes, temos que A1A2 A3 A4 ,
então os triângulos OA1A2 e OA4A3, são congruentes. Segue que OA4 é
congruente a OA1. Portanto A4 também é um ponto da circunferência.
O mesmo raciocínio se repete para os outros vértices do polígono,
concluindo a demonstração.
Corolário 8.27: Todo polígono regular possui uma circunferência
inscrita.
Demonstração: Seja A1A2...An um polígono regular. Pela Proposição
8.26, temos que ele é inscritível em uma circunferência de centro O.
Os lados A1A2, A2A3, ..., An-1An são cordas congruentes, pois o polígono
é regular. Seja A1’, A2’, ... , A’n-1, An’ os pontos médios de A1A2, A2A3,...,An-1An
respectivamente. Utilizando raciocínio semelhante ao utilizado na
demonstração da Proposição 8.20 concluimos que
OA'1 OA'2 ... OA'n1 OA'n .
Assim, temos que O é o centro de uma circunferência c’ que passa
pelos pontos A1’, A2’, ... , A’n-1, An’ . Como
OA'1 A1A2, OA'2 A2 A3,..., OA'n An A1 ,
segue que A1A2...An tem lados tangentes a c’ e portanto o polígono
está circunscrito na circunferência c’.
8.3. Perímetro de uma Circunferência
Nesta seção, vamos apresentar o perímetro de uma
circunferên-cia. Para isto vamos compará-lo com o perímetro de
polígonos inscritos e circunscritos.
146
8. Circunferência e Círculo
Lema 8.28: O perímetro de qualquer polígono convexo inscrito numa
circunferência é menor que o perímetro de qualquer polígono
convexo circunscrito a ela.
Demonstração: Sejam A1 A2 ... Am em polígono inscrito e B1 B2 ... Bn em
polígono circunscrito. Prolongando-se os lados Ai Ai+1 para i=1, ..., m–1
e Am A1 no sentido Ai para Ai+1 e de Am para A1, poderá ocorrer o
seguinte:
o prolongamento passar por um vértice do polígono circunscrito.
alguns lados do polígono circunscrito ter mais de uma interseção
com tais prolongamentos.
alguns lados do polígono circunscrito ter apenas uma interseção
com os prolongamentos.
alguns lados do polígono circunscrito não ter interseção com os
prolongamentos.
B2 C1
No desenho ao lado ocorre todas essas
possibilidades e qualquer generalização
ocorrerá em um desses casos. Nesse
exemplo m = 6 e n = 5, mas isso é
irrelevante conforme veremos. Aqui temos
C2
B3
A3
A2
C6
B1
A4
A1
C3
A5
A6
B5
C5
C4
B4
A1A2 encontra o vértice B2 C1,
A2A3 encontra o lado B2B3 em C2,
A3A4 encontra o lado B3B4 em C3,
A4A5 encontra o lado B3B4 em C4,
A5A6 encontra o lado B1B5 em C5,
Nenhum prolongamento encontra o lado B5B1 e
A6A1 encontra o lado B1B2 em C6.
Nas desigualdades abaixo utilizaremos apenas a desigualdade
triangular e assim o procedimento a seguir independe do número de
lados dos polígonos. Temos:
A1A2 A2C1 A1C6 C6B2
A2 A3 A3C2 A2C1 B2C2
A3 A4 A4C3 A3C2 C2B3 B3C3
147
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
A4 A5 A5C4 A4C3 C3C4
A5 A6 A6C5 A5C4 C4B4 B4C5
A6 A1 A1C6 A6C5 C5B5 B5B1 B1C6
Somando-se ambos os lados da desigualdade teremos o desejado.
Observamos que, em todos os casos, os únicos termos que aparecem
no somatório além de lados e segmentos contidos nos lados dos
polígonos, são os prolongamentos, porém esses aparecem em ambos
os lados da desigualdade e assim são cancelados.
Corolário 8.29: Qualquer polígono convexo inscrito tem perímetro
menor que oito vezes o raio da circunferência.
Demonstração: Basta tomar como
quadrado e utilizar o Lema 8.28.
polígono
circunscrito
um
Uma propriedade fundamental dos números reais será
importante para estabelecer o conceito de perímetro de
circunferência:
Axioma do Completamento: Todo subconjunto não-vazio dos
números reais, limitado superiormente, possui supremo nos reais.
Como conseqüência deste axioma temos que IR satisfaz a
propriedade:41
a, b IR, a > 0, existe n IN, tal que
1
.b a ,
n
(1)
o que é equivalente a dizer que em IR, o conjunto dos números
naturais IN é ilimitado superiormente.
Vamos a seguir, demonstrar esta eqüivalência.
41 Por este motivo dizemos que IR é um corpo arquimediano. O nome se deve a
Arquimedes de Siracusa que nasceu em 287 a.C. em Siracusa, Itália e morreu em 212 a.C. em
Siracusa, Sicília. Ele aperfeiçoou métodos de integração que permitiram encontrar áreas,
volumes e áreas de superfícies de muitos corpos. Seu mais famoso teorema fornece o peso de
um corpo imerso num líquido, conhecido como Prinçipio de Arquimedes. Arquimedes morreu
assassinado por um soldado romano.
148
(
8. Circunferência e Círculo
Vejamos primeiramente que IN é ilimitado superiormente,
caso IR satisfaça (1). De fato, para todo a > 0, fazendo b = 1, c
substituindo em (1) obtemos
1
e
a
1 1
, ou seja, n > c. Assim, nenhum
n c
elemento positivo de IR pode ser limitante superior de IN. Então, IN é
ilimitado superiormente. Reciprocamente, se IN é ilimitado
superiormente, dados a > 0 e b em IR, existe n IN tal que
b
n e,
a
1
.b < a.
n
Agora vamos mostrar que, de fato, IR satisfaz (1). Se IR não for
arquimediano, então, pelo que acabamos de ver, IN é limitado
superiormente. Seja S um limite superior de IN, então n + 1 S, para
todo n IN. Logo, n S – 1, para todo n IN. Então S – 1 é também um
limitante superior de IN. Como S – 1 < S, IN é limitado superiormente
mas não existe supremo, o que contradiz o axioma do
completamento.
Vamos considerar dois subconjuntos dos números reais: um
formado pelos perímetros de polígonos convexos inscritos numa
circunferência e o outro formado pelos perímetros de polígonos
convexos circunscritos na mesma circunferência. A justificativa para
considerar estes dois subconjuntos pode ser vista na seguinte
construção:
portanto,
Considere um polígono P convexo inscrito
numa circunferência, A e B dois de seus
vértices consecutivos. Tomemos um ponto
C no arco AB e chamemos de P’ o polígono
obtido, trocando-se o segmento AB pelos
segmentos AC e CB.
B
C
O
A
Pela desigualdade triangular temos que AB AC CB, e assim
o perímetro de P é menor que o perímetro de P’. Concluímos então
que, aumentando o número de vértices de um polígono convexo
inscrito numa circunferência, aumenta-se o perímetro. Mas este
procedimento não resulta num crescimento ilimitado, pois como
149
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
vimos no Lema 8.28, o polígono circunscrito tem perímetro maior que
qualquer polígono convexo inscrito.
Lema 8.30: Dados um número real positivo e uma circunferência
qualquer C de raio r,
a) existe um polígono regular circunscrito em C cujo lado tem
medida menor que .
b) existem polígonos regulares, um inscrito e outro circunscrito em
C, tais que a diferença entre os perímetros é menor que .
Demonstração: a) Dado um polígono
regular circunscrito em C com n lados, se
todos os lados forem menor que nada
precisa ser feito, caso contrário, seja AB um
A
A’
K
O
B
lado tal que AB e seja K o ponto de
tangência de AB com a circunferência,
conforme desenho. Seja A’ um ponto entre
A e K, tal que A'K . Por construção SOA’ divide KÔA e assim
2
A’ÔK < AÔK. Pelo fato de IR ser arquimediano existe um número n
1
ˆ m(A'OK)
ˆ . Considere um polígono regular
IN tal que
m(AOK)
n
2
ˆ , este polígono terá lado
circunscrito cujo ângulo central é
m(AOK)
n
menor que 2A'K 2. . De fato, como A’OK é um triângulo
2
retângulo, tomando-se o lado do polígono regular cujo ângulo central
2
ˆ , teremos 2 m(AOK)
ˆ 2 m(A'OK)
ˆ , pela Proposição 4.22 o
é m(AOK)
n
n
lado do polígono será menor que 2A'K = .
150
8. Circunferência e Círculo
b) Sejam dois polígonos regulares, um
inscrito e outro circunscrito, com o mesmo B1
D
B2
número de lados. É fácil mostrar que as
A2
A1
medidas dos lados destes polígonos
dependem
apenas
do
raio
das
circunferência, e assim, sem perda de
O
r
generalidade, o desenho ao lado pode
representar os lados A1A2 e B1B2 do
polígono
inscrito
e
do
polígono
circunscrito, respectivamente.
Temos por semelhança de triângulos que:
B1B2 OB1 OB1 OB1
r
A1A2 OA1 OD
Mas se 2pc é o perímetro do polígono circunscrito e 2pi é o perímetro
p
BB
do polígono inscrito, c 1 2 , pois os polígonos são regulares.
pi A1 A2
Assim,
pc OB1
, logo, pelo Exercício 7.2,
pi
r
pc pi OB1 r
OB1 r
4
.
pi
r
4.r
Mas pelo Lema 8.30 pi < 4.r, portanto
pc – pi < 4.( OB1 r )
Por outro lado, pela desigualdade triangular
OB1 B1D OD.
(1)
(2)
Assim, OB1 r B1D . De (2) em (1), obtemos que
pc pi 4.B1 D 2.B1 B2 .
Pela parte a) é possível obter um polígono regular circunscrito tal que
B1B2 . Logo 2pc – 2pi < .
4
151
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Uma propriedade intrínseca deste par de conjuntos nos levará
naturalmente ao conceito de perímetro da circunferência. A
propriedade é dada pela definição a seguir.
Definição 8.31: Dois conjuntos de números reais X e Y formam um par
de classes vizinhas, denotado por (X,Y), se satisfizer as seguintes
condições:
a) x X, y Y, x < y.
b) > 0, x X, y Y, tais que y – x < .
Temos que num par de classes vizinhas (X,Y), pelo axioma do
completamento, X possui supremo e Y possui ínfimo. Na verdade, eles
são iguais, ou seja, se a = sup X e b = inf Y, então a = b. De fato, pelos
itens (a) e (b) da Definição 8.31, temos sup(X – Y) = 0. Porém,42
a – b = sup(X) – inf(Y) = sup(X) + sup(-Y) = sup(X – Y ) = 0.
Logo, o par (X,Y) define um único número real e para obter o
conceito de perímetro de uma circunferência construiremos um par
de classes vizinhas.
Teorema 8.32: Se X é o conjunto dos perímetros dos polígonos
regulares inscritos e Y é o conjunto dos perímetros dos polígonos
regulares circunscritos numa circunferência qualquer, então o par
(X,Y) é de classes vizinhas.
Demonstração: Temos:
a) Pelo Lema 8.28, pi X e pc Y, 2pi < 2pc.
b) Pelo Lema 8.30, >0, existem polígonos regulares inscritos e
polígonos regulares circunscritos tais que 2pc – 2pi < .
Os itens (a) e (b) garantem que (X, Y) são classes vizinhas por
definição.
Definição 8.33: Chama-se comprimento da circunferência ou
perímetro da circunferência, ao número real obtido pelo par de
classes vizinhas (X,Y) dado pelo teorema anterior.
42
Utilizaremos as propriedades do supremo e ínfimo nos números reais: sup(X + Y) =
sup(X) + sup(Y) e sup(-Y) = -inf(Y).
152
8. Circunferência e Círculo
A questão que permanece é como calcular este comprimento.
O próximo resultado nos fornece o caminho para obter este valor
(pelo menos de forma aproximada).
Teorema 8.34: Os comprimentos de duas circunferências são
proporcionais às medidas dos respectivos raios.
Demonstração: Sejam K e K’ o comprimento de duas circunferências
quaisquer, com raios r e r’ respectivamente. Queremos mostrar que
K r
. Podemos considerar, sem perda de generalidade, que estas
K' r'
duas circunferências são concêntricas, pois o resultado independe de
suas posições. Nas duas circunferências inscrevemos e
circunscrevemos polígonos com o mesmo número de lados. Temos
p
p
r
r
por semelhança de triângulos que i
e c . Tomando
pi ' r'
pc ' r'
Kr'
K r
p
p K
, então
x
. Assim, c i . Como 2pi < K temos
pc ' pi ' x
x r'
r
2pi ' 2pi
1, ou seja, 2pi’ < x. Analogamente, obtemos pc’>x. Logo x
x
K
é limitante superior dos perímetros dos polígonos inscritos e x é
limitante inferior dos perímetros dos polígonos circunscritos, pela
K r
unicidade de classes vizinhas x = K’. Assim,
.
K' r'
Corolário 8.35: A razão entre o comprimento de qualquer
circunferência e a medida de seu diâmetro é um número constante.
C
C'
C r 2.r
, ou seja,
,
2.r 2.r'
C' r' 2.r'
para quaisquer duas circunferências de comprimentos C e C’ e raios r e
r’.
Demonstração: Basta observar que
Definição 8.36: A razão constante a que se refere o Corolário 8.35 é
designada por (letra grega que se lê “Pi”).
153
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Assim, o comprimento da circunferência de raio r é 2r e, para
obtermos o comprimento da circunferência, precisamos encontrar um
valor (aproximado) para e o valor do comprimento da circunferência
será tão preciso quanto for a aproximação de .
Para isto, consideremos um polígono regular de n lados e
representemos um lado por ln . Vamos determinar o lado l2n de um
polí-gono regular de 2n lados em termos de ln e do raio R da
circunferência
circunscrita.
Acompanhe
o
ln
.B
desenvolvimento pelo desenho ao lado.
C
.
Por hipótese o triân-gulo ABC é isósceles
l
(pois o polígono de lado 2n é regular) e o 2n
P
triângulo ABO também é isósceles (OA e
.
.
A
O R
OB são raios), logo OC é perpendicular a AB
(porque?). Assim pela Proposição 8.4,
AP
.
D
ln
.
2
Como CD é diâmetro, pelo Corolário 8.16, ACD é retângulo em
A. Pelo Exercício 7.16a), temos que l 22n CP.(2R) e pelo teorema de
2
l
Pitágoras, CP l 22n n . Substituindo CP da primeira igualdade na
2
2
segunda
Utilizando
igualdade
por
obteremos
exemplo
o
l4
que
l 2n 2R2 R 4R2 l n2 .
para
começar,
temos
que
l 4 R 2 (porque?). Assim pelo que obtivemos acima l 8 R 2 2 ,
e
assim
l 32 R 2 2 2 2
l16 R 2 2 2 ,
sucessivamente. Isto nos fornece uma tabela. Aqui 2pn é o perímetro
do polígono com n lados.
n
4
8
16
32
154
ln
1,41421 . R
0,76537 . R
0,39018 . R
0,19603 . R
2pn
5,6568 . R
6,1229 . R
6,2428 . R
6,2730 . R
8. Circunferência e Círculo
64
128
256
512
0,09814 . R
0,04908 . R
0,02454 . R
0,01227 . R
6,2806 . R
6,2825 . R
6,2830 . R
6,2831 . R
O número 6,2831 na última linha e última coluna da tabela
acima, dividido por 2, fornece um boa aproximação para , ou seja,
3,1415.
Sabemos a medida de um arco de circunferência em graus. E o
comprimento do arco de uma circunferência de raio R?
Para resolver este problema, basta fazer uma simples regra de
três. Supondo que o arco mede graus, temos que 360o corresponde
a 2R, qual o comprimento l do arco que corresponde a graus? É
R
claro que l =
.
180o
Definição 8.37: Chama-se radiano (rd) todo arco de circunferência cujo
comprimento é igual ao comprimento do raio da circunferência que o
contém. Assim uma circunferência (cujo comprimento é 2R) tem 2
radianos.
A grande utilidade de se medir ângulos em radianos é que
nesse caso estamos trabalhando com números reais, e podemos
operá-los sem preocupações com a unidade. Uma boa justificativa
para se definir esta nova unidade de medida de ângulo pode ser vista
em [11]. Utilizaremos como padrão neste texto o radiano como
unidade de medida de ângulo a partir de agora.
O comprimento de um arco que mede radianos é l = R.
8.4. Área de um Círculo
Para obter a área de um círculo utilizaremos o mesmo
procedimento: construiremos um par de classes vizinhas. Para isto
precisaremos dos seguintes lemas.
Lema 8.38: A área de um polígono convexo regular inscrito numa
circunferência é menor do que a área de um polígono convexo regular
circunscrito.
155
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Demonstração: Dados dois polígonos regulares um inscrito e outro
circunscrito com perímetros 2pi e 2pc, respectivamente, temos que a
área do inscrito Ai é piai e do circunscrito Ac é pcac onde ai e ac são os
respectivos apótemas, conforme Exercício 6.5. Como, pelo Lema 8.28,
pi < pc e sendo ai apótema temos ai < r, segue imediatamente que Ai < Ac.
Corolário 8.39: A área de qualquer polígono regular inscrito é menor
que quatro vezes o quadrado do raio.
Demonstração: Considera-se um quadrado circunscrito e assim para
qualquer polígono regular inscrito de área Ai, temos Ai < 4.r2.
Lema 8.40: Para todo > 0, existem dois polígonos regulares
convexos, um inscrito e outro circunscrito numa circunferência C de
raio r, cujas diferenças entre as áreas é menor que .
2
Ac OB1
4OB1
, assim
2
Ai OA1
4OA1
2
2
4OB
2
1 OA1
4.r 2
2
.
O
Como Ai < 4.r2, pelo Corolário 8.39, segue que
2
2
2
B2
A2
A1
2
Ac Ai 4 OB1 OA1
2
Ai
4OA1
D
B1
Demonstração: Pelo Exercício 7.18, temos
que:
2
2
Ac Ai 4 OB1 OA1 4 DB1 2DB1 B1B2 ,
pelo Teorema de Pitágoras. Mas pelo Lema 8.30 a) podemos construir
um polígono circunscrito regular, cujo lado B1B2 tem medida menor
que
. Portanto, temos Ac – Ai < , como queríamos demonstrar.
Teorema 8.41: O conjunto X das áreas dos polígonos regulares
inscritos e o conjunto Y das áreas dos polígonos regulares
circunscritos constituem um par de classes vizinhas.
156
8. Circunferência e Círculo
Demonstração: Pela Definição 8.31, devemos demonstrar que
a) x X, y Y, x y.
b) 0, x X, y Y , tais que x y .
O item (a) é imediato pelo Lema 8.38. O item (b) segue
imediatamente do Lema 8.40.
Definição 8.42: Chama-se área do círculo, o número real obtido pelo
par de classes vizinhas (X,Y) dado pelo teorema anterior.
Para obter o valor da área utilizamos o seguinte resultado:
Teorema 8.43: A área do círculo é r2, onde r é o raio da
circunferência.
Demonstração: Temos que 2pi<2r<2pc. Portanto, pir < (r).r < pcr.
Seja ai o apótema do polígono inscrito. Como ai < r, temos
piai < pir < r2 < pcr = pcac,
onde ac é o apótema do polígono circunscrito que é igual ao raio r da
circunferência. Logo, Ai < r2 < Ac para todos os polígonos inscritos e
circunscritos. Como o número definido pelo par de classes vizinhas
(X, Y) é único, temos que = r2.
Exemplos
8.4. Chamamos de setor circular de raio R e
ângulo radianos, a região plana do círculo
que compreende o arco correspondente a
radianos e os lados do ângulo que passa
pela extremidade deste arco (ver desenho
ao lado). Quando temos um arco de 2 radianos, a área correspondente, como vimos no
Corolário 8.39 é R2, logo se temos um arco
R
R
2
medindo radianos teremos uma área deste setor A(S) = R .
2
157
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
8.5. Um segmento circular de um círculo de
raio R, é a região do círculo compreendida
entre um arco AB e o segmento AB (ver desenho ao lado). Vamos calcular a área de um
segmento circular, onde R é o raio do círculo e L é a medida do arco. Pela Definição 8.37,
L .R . Então
.R2
L
. Pelo Exemplo 8.4, Asetor
, portanto
2
R
L 2
.R
L.R
. Assim, pelo Axioma III.6, temos
Asetor R
2
2
R.L Rh R
Aseg Asetor OAB ATriângulo OAB
(L h).
2
2 2
8.6. Uma coroa circular ou anel circular é a
região
compreendida
entre
duas
circunferên-cias concêntricas (ver desenho).
Vamos calcu-lar a área de uma coroa circular
onde a cir-cunferência menor tem raio r e a
circun-ferência maior tem raio R. Pelo
Axioma III.6,
temos
Acoroa ACM ACm R2 r 2 (R2 r 2 ).
8.7. No desenho ao lado, ABCD é um quadrado de lado a. Vamos calcular a área S da
região sombreada ABE. Consideremos o setor circular ABE e o triângulo ABE. Temos
que ABE é um triângulo equilátero, pois os
lados são raios da circunferência de raio
AB . Seja M o ponto médio de AB, então
EM é mediana do triângulo ABE. Logo, pelo
Teorema 4.6 é também a altura. Pelo
Teorema de Pitágoras, temos
158
D
A
R
r
E
C
B
8. Circunferência e Círculo
2
2
3a2
a 3
a
ME a ME
ME
.
4
2
2
2
Assim, Atriângulo ABE
2
a.
a 3
2
2 a 3 . Pelo Exemplo 8.4,
2
4
a2
AsetorABE . .
3 2
Portanto
.a2 a2 3
.
6
4
Logo, a área desejada é AsetorABE AsegmentoBE , pois Aseg. BE Aseg.
AsegmentoBE AsetorABE AtriânguloABE
AE .
Portanto,
A
.a2 .a2 a2 3 2.a2 a2 3 2
3 2 4 3 3
a
.
a
6
6
4
6
4
12
3 4
8.5. Exercícios
8.1. Demonstre que dadas duas circunferências concêntricas, toda
corda da circunferência maior, que é tangente à circunferência menor,
é dividida ao meio no ponto de tangência.
8.2. Demonstre que as tangentes a uma circunferência nas
extremidades de um diâmetro são paralelas.
8.3. Demonstre que se duas circunferências são tangentes, seus
centros e o ponto de tangência são colineares. (Sugestão: Desenhe
sua tangente comum).
8.4. Duas circunferências que tem raios com mesma medida são ditas
congruentes. Numa mesma circunferência ou em circunferências
congruentes, duas cordas são eqüidistantes do centro se, e somente
se, são congruentes.
159
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
8.5. Dados dois segmentos de medidas a e b, construir com régua e
compasso um segmento cuja medida c é a média geométrica de a e b.
B
A
8.6. No desenho ao lado, O é o centro da
circunferência, BC é um diâmetro e AB é
congruente a OC. Determine as medidas
dos arcos dadas por AB e AC .
.
O
C
8.7. Em uma mesma circunferência, ou em circunferências
congruentes, cordas congruentes determinam ângulos centrais
congruentes e reciprocamente.
8.8. Mostre que existem infinitos pontos na circunferência.
B
.
8.9. Se no desenho ao lado O é o
centro da circunferência e m(D̂) 35o ,
determine a medida dos ângulos  e
CÔB.
A.
.C
.
O
.
D
.C
8.10. Se no desenho ao lado, m(Â)=75o,
a medida do arco AC é 90o e a medida
do arco BC é 70o, determine as
medidas de todos os outros arcos
menores e ângulos.
.B
A.
.
O
.
D
8.11. Seja AB o diâmetro de uma circunferência, C e D pontos da
circunferência em semiplanos opostos em relação a reta AB, tais que
BC é congruente a BD. Demonstre que os triângulos ABC e ABD são
congruentes.
160
8. Circunferência e Círculo
8.12. a) Mostre que todos os pontos da mediatriz equidista dos
extremos do segmento.
b) Mostre que numa circunferência, a mediatriz de uma corda
qualquer passa pelo seu centro.
8.13. Considere uma figura que consiste em um segmento AB de
comprimento a e em dois arcos de circunferências AC e BC de raio a e
centros respectivamente em B e A. Calcule o raio da circunferência
inscrita nessa figura, tangente ao segmento AB e aos arcos AC e BC .
8.14. Seja ABC um triângulo isósceles de base BC inscrito numa
circunferência. Mostre que a medida do arco BC é o dobro da
diferença das medidas do ângulo externo na base do triângulo e do
ângulo da base.
8.15. Como fica a potência de um ponto P exterior a circunferência
quando conduzimos por ele uma tangente a circunferência e não uma
secante como no Teorema 8.17?
6
8.16. No desenho ao lado encontre os
valores de x e y, onde O é o centro da
circunferência.
7
y
.
O
1
x
4
x
8.17. a) Mostre que as medianas de um triângulo qualquer se
encontram num único ponto denominado baricentro. Mostre ainda
que o baricentro divide as medianas na razão 2:1.
b) Mostre que as alturas de um triângulo qualquer se encontram num
único ponto denominado ortocentro.
8.18. Dê a medida em radianos de um arco de circunferência de
comprimento 2R, de uma circunferência de raio G.
161
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
8.19. O comprimento de uma circunferência C vale duas vezes o
comprimento de uma circunferência C’. Qual é a relação entre as áreas
dos círculos que têm C e C’ como fronteiras.
8.20. Calcular as áreas das regiões demarcadas nos desenhos abaixo.
Os dois primeiros desenhos são quadrados de lados iguais a a.
a
a
b
162
Capítulo 9: Trigonometria
O Teorema de Tales e o Teorema de Pitágoras nos levam a um
estudo mais detalhado das relações métricas no triângulo,
denominado trigonometria, cuja palavra se origina do grego
“trígonos” que significa triângulo e “metrein” que significa medir.
Neste estudo estaremos considerando a medida dos ângulos
em radianos.
9.1. Funções Trigonométricas
B
Considere dois triângulos semelhantes ABC
e A’B’C’, retângulos em C e C’, respectivamente, conforme desenhos ao lado.
Pela Definição 7.6 temos que
a
b
c
.
a ' b' c'
c
A
b
Dessas equações, é fácil ver que:
a a'
b b'
a a'
,
e
b b'
c c'
c c'
c
c’
c
razões trigonométricas.
C
B’
As razões a , b e a são denominadas
b
a
A’
b’
a’
C’
Observamos, pelas equações acima, que estas razões
dependem somente de que é a medida do ângulo  (ou Â’).
Podemos assim, construir três funções cujo domínio são os possíveis
valores de , ou seja, 0
, pois esta é a condição para termos os
2
triângulos ABC e A’B’C’. A imagem destas funções será IR+, pois são
razões entre números reais positivos.
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
A primeira função é dada pela razão a e será chamada de
c
função seno (para saber a origem deste nome ver [5]). Assim, temos
a
sen: ]0, [ IR+, que associa a cada a razão
e escreveremos
2
c
a
sen .
c
Usando triângulos onde é possível medir aproximadamente os
seus lados, podemos construir uma tabela de valores aproximados da
função seno (na verdade, não é desta maneira que se constrói tal
tabela, mas para efeito de ilustração da utilidade da função seno,
basta saber que é possível construir esta tabela).
Exemplo:
9.1. Suponhamos que queremos calcular o raio R da Terra. Um
processo utilizado desde a antiguidade é o seguinte:
Considere uma torre de altura h conhecida,
A
torre
conforme desenho ao lado. Mede-se o
h
ângulo que faz a reta AB (linha do
B
R
horizonte) com a vertical AO (obtida pela
.
torre). Pela definição do seno, temos que
R O
linha do horizonte
R
Terra
sen ,
Rh
donde, R sen + h.sen = R, ou seja,
h. sen
.
R
1 sen
Pela última equação, se tivermos as medidas de h e , conseguimos
através de uma tabela de senos calcular o raio R da Terra.
Utilizando novamente as razões trigonométricas, definimos
através da razão b uma segunda função, denominada cosseno de .
c
Escrevemos
2
cos: ]0, [ IR+, tal que, cos b .
164
c
9. Trigonometria
Finalmente a razão a nos dá uma terceira função que é
b
chamada tangente de . Escrevemos:
2
tg: ]0, [ IR+, tal que, tg
a
.
b
Observemos que:
tg
a
a
sen
.
c
b
b
cos
c
9.2. Relação Fundamental
Uma relação importante entre seno e cosseno segue do
seguin-te resultado:
Teorema 9.1: Para todo ângulo 0 < < tem-se que sen2 +cos2 =1.
2
Demonstração: Tomemos
como
referência o triângulo ABC do desenho ao
lado. Como ABC é um triângulo retângulo,
pelo teorema de Pitágoras, temos que a2 +
b2 = c2. Assim,
2
2
a b
a b
sen2 cos2
c
c
c2
2
c
2 1.
c
2
B
c
a
2
A
b
C
Esta relação entre o seno e o cosseno será denominada,
relação fundamental. Como para todo no intervalo 0, , sen ,
2
cos e tg são números positivos, pela observação anterior e o
Teorema 9.1, temos que conhecida uma delas, se conhece as outras
duas.
165
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Exemplos
9.2. Para alguns valores de ângulos, as funções trigonométricas são fáceis de calcular.
Consideremos um triângulo ABC isósceles
a 2
retângulo cujos catetos medem a. Pelo
a
Teorema de Pitágoras sua base mede a 2 .
Como o triângulo é isósceles, os ângulos
4
agudos medem . Temos então,
a
4
a
1
2
a
1
2
a
sen
, cos
e tg 1.
4 a 2
2
4 a 2
2
4 a
2
2
9.3. Um outro triângulo retângulo que
possui ângulos cujo cálculo das funções
trigonométricas são fáceis de serem
3
c
c/2
calculadas são triângulos com ângulos
agudos
e
. Pelo Exercício 6.15, se a
6
3
hipotenusa mede c, então o cateto oposto
ao
ângulo de medida
6
c
3
2
mede c e o cateto adjacente c 3 . Assim
2
2
6
temos:
c
sen 2 1
6 c 2
c 3
2
cos
6
c
c
2
tg
6
c 3
2
3
2
1
3
3
3
c 3
sen
2 3
3
c
2
c
1
e cos 2
3 c 2
c 3
2 3
tg
c
3
2
Não podemos nos esquecer, que estamos trabalhando com
radianos como unidade de medida deângulos. Em graus, os ângulos
que conseguimos até agora obter os valores das funções
trigonométricas foram: 45o, 30o e 60o. Lembramos que este
procedimento não é possível para todos os ângulos e que algumas
166
9. Trigonometria
propriedades nos levarão a obter outros valores para certas classes de
medidas de ângulos. A seguir daremos alguns resultados que nos
auxiliarão nisto.
Proposição 9.2: Sejam e ângulos complementares quaisquer,
1
então sen = cos e tg
.
tg
Demonstração: Aplicando as definições
das funções trigonométricas no desenho
ao lado, onde temos e
complementares, obtemos:
a
a
b
sen , cos , e tg ,
c
a
c
ou seja, sen cos
B
c
A
a
b
C
a 1
1
a
e tg
.
b b tg
c
a
Segue imediatamente desta proposição e dos Exemplos 9.2 e
9.3, que conhecido as funções trigonométricas de ângulos do
intervalo ]0, ] , passamos a conhecer imediatamente os valores das
4
funções dos ângulos complementares, que estão no intervalo [ , [ .
4 2
Outro resulta-do que facilitará o cálculo das funções trigonométricas
para muitos va-lores é o seguinte:
Proposição 9.3:
, então sen 2 = 2 sen cos.
4
b) Se 0 , então sen 1 cos .
2
2
2
a) Se 0
167
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Demonstração: No desenho ao lado
temos que BA DA 1, C é ponto médio
de BD, e portanto pelo Teorema 4.6, os A
triângulos ABC e ADC são retângulos em C
e AC é bissetriz do ângulo A. O ponto B’ é o
pé da perpendicular a AD, passando por B.
Assim, temos:
1 B’
D
C
1
B
a) Por definição de seno e cosseno, BC DC sen e AC cos .
Ainda pela definição de seno, temos que BB' sen2 . Pelo Teorema
1
1
6.8, a área do triângulo ABD é igual a AD . BB' . BB' , ou seja,
2
2
temos que BB' = 2 Área(ABD). Pelo Axioma III.6, a área de ABD, é igual
AC. BC
cos.sen , ou seja, temos que Área(ABD) = cos .sen
a 2.
2
. Logo, sen 2 = BB' = 2.Área(ABD) = 2.sen.cos. Observe que a
restrição do ângulo neste item, é devido a construção feita.
b) Pelo Axioma III.2, temos que,
1 DA DB' B' A
(1)
Por definição de cosseno no triângulo BB’D, temos que cos
mas BD 2sen e como
cos =sen e assim
, temos pela Proposição 9.2, que
2
DB' 2sen2 .
Ainda por definição de cosseno no triângulo ABB’, temos que
cos2 AB' .
Substituindo (2) e (3) em (1), obtemos:
2 sen2 +cos 2 = 1
e assim,
1 cos2
.
sen
2
168
DB'
,
BD
(2)
(3)
9. Trigonometria
Trocando 2 por e consequentemente por
, teremos a equação
2
desejada, no intervalo desejado.
Exemplo:
9.4. Vamos agora calcular o valor das
C
funções trigonométricas para o ângulo de
1
o
rad (que é igual a 18 ). Considere um
10
A
H
triângulo isósceles ABC com ângulo Â
1
medindo
e lados AB e AC congruentes
D
5
B
medindo 1. Logo, os ângulos adjacentes da
2
base medem
. Seja D um ponto de AB tal que B Ĉ D mede
.
5
5
Assim, teremos no triângulo ACD que o ângulo A Ĉ D mede
eo
5
2
ângulo C D̂ B mede
. Pelo Corolário 4.10, temos que AD CD CB,
5
cuja medida vamos denominar por x. Pelo Teorema 7.8, os triângulos
ABC e CBD são semelhantes, e assim, sendo x > 0:
CB AC
x
1
5 1
1 x x2 x2 x 1 0 x
.
2
DB CB 1 x x
Observe que, de acordo com o Exemplo 6.9, este é o número áureo.
Logo, é possível construir utilizando régua e compasso os ângulos
5
2
e
que são ângulos do pentágono e dodecágono regulares.
5
Traçando-se a bissetriz do ângulo  no triângulo isósceles ABC temos
que H é ponto médio de BC e AH a altura em relação a base BC. Assim,
x
5 1
pela definição de função seno, temos sen
. Pela
10 2
4
169
Geometria Plana e Espacial
relação
fundamental
J. R. Gerônimo/V. S. Franco
sen2
cos2
1,
10
10
obtemos
10 2 5
cos
, e assim
10
4
5 1
2
sen
5 1
5 1
10
4
tg
10 cos
10 2 5
10 2 5
10 2 5
.
10
4
5 12
62 5
3 5
5 2 5
.
5
10 2 5
10 2 5
5 5
Com estes valores das funções trigonométricas calculadas para o
2
ângulo de
, obtemos também os valores para os ângulos de
,
10
5
3
,
e
, utilizando a Proposição 9.2 e a Proposição 9.3.
10 5 20
9.3. Ampliando o Domínio
Vamos agora ampliar o domínio das funções trigonométricas
já definidas. Para isso consideremos uma semi-circunferência de
centro O, conforme desenho a seguir. Neste desenho, AB é um
diâmetro, P um ponto qualquer da semicircunferência distintos de A e
B e P’ o pé da perpendicular a AB por P.
No primeiro desenho ao lado, considerando o triângulo OPP’, observamos que
o ângulo pertence ao domínio das
.P
funções
trigonométricas
definidas
anteriormente. Por outro lado, no segundo
desenho ao lado, isso não ocorre, pois
.
neste desenho o ângulo é maior que . É A
P’ B
O
2
coerente com a definição anterior das
funções trigonométricas, defi-nirmos sen 0
= 0, cos 0 = 1 e tg 0 = 0, pois neste caso,
170
9. Trigonometria
teremos P = B = P’. Da mesma
P.
A
P’
.
O
B
sen 1, cos 0 e como queremos que
2
2
sen
, a tangente de
não está definida. Assim aumentamos
tg
cos
2
nosso intervalo de definição para [0, ].
2
Com base no desenho ao lado,
consideremos agora o ângulo = – ;
P.
neste caso o ângulo está no intervalo de
definição da função seno já estabelecida.
PP'
.
Definimos então, que sen sen
e
OP
A P’ O
B
assim podemos definir sen = 0, que é o
caso em que P = A = P’.
Temos que O divide a reta AB em duas semi-retas. Utilizando o
Teorema 3.3, podemos assumir que as coordenadas dos pontos na
semi-reta SOA são negativas e assim que cos = –cos e cos = –1.
sen
Como queremos que tg
, temos que para ângulos
cos
entre
e , tg = - tg e tg = 0.
2
Assim ampliamos o domínio das funções trigonométricas para
o intervalo [0,], que é o intervalo de variação dos nossos ângulos.
forma, definimos
Exemplo:
9.5. Neste domínio ampliado temos válida a relação fundamental. De
fato,
171
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
cos20 + sen20 = 1 + 0 = 1;
cos2 + sen2 = 0 + 1 = 1;
2
2
cos2 + sen2 = 1 + 0 = 1;
se
< < , então pela definição anterior, fazendo = – ,
2
obtemos cos2 + sen2 = (–cos)2 + sen2 = 1, pelo Teorema 9.1.
9.6. A Proposição 9.3 pode ser extendida para este novo domínio. De
fato, para o item a) consideremos 0 < < , com e .
4
2
Logo, sabemos pelo item a) da Proposição 9.3 que:
sen2 2sen cos sen 2 2sen cos
2
2
sencos2 sen2 cos
2 sen cos sen cos cos cos sen sen
2
2
2
2
sen2 2 cossen.
Para o item b), consideremos 0 < < , com
e = – .
2
Sabemos pelo item b) da Proposição 9.3 que
1 cos
1 cos
sen
sen
2
2
2
2
1 cos cos sensen
sen cos sen cos
2
2
2
2
2
1 cos
cos
,
2
2
e, pela Relação Fundamental, temos que
1 cos
2 1 cos
2
sen2 cos2 1 sen2 1
sen
2
2
2
2
2
2
1 cos
sen
.
2
2
172
9. Trigonometria
9.4. Lei dos Cossenos
Vamos enunciar agora o resultado que estende o Teorema de
Pitágoras para triângulos quaisquer.
Teorema 9.4 (Lei dos cossenos): Em um triângulo ABC tem-se:
2
2
2
AB AC BC 2AC.BC. cos ,
onde m(Ĉ) .
Demonstração: Se ABC for retângulo em C, então este teorema é
exa-tamente o teorema de Pitágoras. Suponhamos então que Ĉ não
seja reto e m(Ĉ) . Tracemos por A a perpendicular a BC. Como Ĉ ,
por hipótese, não é um ângulo reto, o pé da perpendicular D, não
coincidirá com C. Caso D = B, então o triângulo ABC é retângulo em B, e
BC
nesse caso, pela definição de cosseno temos que cos
e pelo
AC
teorema de Pitágoras
2
2
2
2
2
2
2
2
AB AC BC AC BC 2BC AC BC 2(ACcos).BC,
donde segue o desejado. Por fim, se D B e D C, pelo Axioma II.1,
temos três possibilidades:
C
B
A
A
A
D
D
C
a) B está entre C e D
B
b) D está entre C e B
D
C
c) C está entre D e B
Em todas as possibilidades ADB e ADC são retângulos em D, e assim
2
2
2
2
2
2
AB AD BD
AC AD DC
Subtraindo-se estas duas equações obtém-se
2
2
2
2
AB AC BD DC
173
B
(1)
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
2
Vamos calcular o valor de BD , nas três possibilidades a), b) e c),
dadas acima.
Caso a) Neste caso BD DC BC. Logo, elevando-se ao quadrado
ambos os membros da equação obtemos
2
2
2
BD DC 2DC.BC BC .
Substituindo em (1), teremos:
2
2
2
2
2
2
2
AB AC DC 2DC. BC BC DC AC BC 2DC. BC.
Mas DC AC. cos , donde segue o resultado desejado.
Caso b) Consideremos os resultados apresentados no item a). Assim
2
2
2
2
AB AC BD CD .
Mas BD BC CD. Logo,
2
2
(1)
2
BD BC 2.BC.CD CD .
Substituindo (2) em (1), temos
2
2
2
(2)
2
2
2
2
AB AC BC 2.BC.CD CD CD AC BC 2.BC.CD.
2
2
2
Mas como CD ACcos temos que AB AC BC 2.BC.ACcos .
Caso c) Neste caso BD BC DC. Elevando-se ao quadrado ambos os
membros da equação e em seguida substituindo em (1), obtemos:
2
2
2
2
2
2
2
AB AC BC 2BC. DC DC DC AC BC 2BC. DC.
Mas DC AC. cos( ) AC.( cos) AC. cos , donde segue o
resultado desejado.
9.5. Lei dos Senos
Teorema 9.5 (Lei dos senos): Qualquer que seja o triângulo ABC, temse:
sen sen sen
,
BC
AC
AB
174
9. Trigonometria
onde = m(Â), = m( B̂ ) e = m( Ĉ ).
Demonstração: Seja ABC um triângulo,
com = m(Â), = m( B̂ ) e = m( Ĉ ). Pela
Proposição 8.20, ABC está inscrito numa
.B
circunferência. Seja O o seu centro e R o
seu raio. Considere o diâmetro que tem B
.
como extremidade e seja D sua outra A
.
O
extremida-de. Pelo Axioma II.3, a reta BO
divide o plano em dois semiplanos. Temos
.
C
apenas dois casos a serem estudados, A e C
.
D
estão em semiplanos distintos em relação a
.B
A.
reta BD ou estão no mesmo semiplano em
relação a reta BD, conforme desenho ao
lado. Em ambos os casos, pelo Corolário
.
8.16, o triângulo BDC é retângulo em C. Seja
O
m(D̂) , no primeiro caso temos, pelo
.
C
Corolário 8.16, Â D̂ e, assim,
sen
.
D
BC
= sen =
. Logo, BC 2Rsen . No
2R
segundo caso, BD̂C e BÂC
são suplementares, pois A, B, C e D sendo pontos da circunferência, o
quadrilátero ABCD está inscrito na circunferência e os ângulos BD̂C e
BÂC são ângulos opostos, pela Proposição 8.24. Assim por definição
de seno, temos sen sen . Consequentemente, BC 2Rsen . De
maneira análoga obtemos AB 2Rsen e AC 2Rsen . Comparandose as três equações obtidas, teremos o resultado desejado.
9.6. Exercícios.
9.1. Apresente um procedimento para o cálculo da largura de um rio
tendo acesso apenas a uma das margens. Apresente também um
procedimento para o cálculo da altura de um edifício.
175
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
9.2. Quando um carpinteiro diz que um telhado deve ter um
decaimento de 30% significa que nesse telhado para cada metro na
horizontal corresponde 30% de um metro na vertical. Qual deve ser o
ângulo de inclinação para que o decaimento seja de 30%.
9.3. Calcule os valores das funções trigonométricas para os ângulos de
2 3
,
,
e
(em graus, iguais a 72o , 54o, 36o e 9o), respectiva5 10 5
20
mente.
9.4. Construa com régua e compasso ângulos de 36o e 72o.
3
, 0 , calcule cos e tg .
5
2
b) Sabendo que tg 5, 0 , calcule cos e sen .
2
9.5. a) Sabendo que sen
9.6. Mostre que a área de um triângulo eqüilátero de lado igual a 1 é
dada por (sen ).(cos ).
3
3
9.7. Num triângulo ABC,
AB 30, AC 50, m(Â) e cos
4
.
5
Calcule a altura em relação a AC e a área do triângulo ABC.
9.8. Num trapézio ABCD, AB é paralelo a CD, AD 20 e BC 26 . Se
1
= m(Â), = m( B̂ ) e sen , qual é a altura do trapézio e qual o
2
valor de sen ?
9.9. Num paralelogramo ABCD, a diagonal BD é perpendicular a AB e
= m(Â). Se AB 5 e tg 1 , qual é a área do paralelogramo?
9.10. Mostre que:
176
9. Trigonometria
a) cos2
1
.
1 tg 2
b) sen2
tg 2
.
1 tg 2
9.11. a) Os lados de um triângulo retângulo estão em progressão
aritmética. Qual é o cosseno do maior ângulo agudo?
b) Os lados de um triângulo retângulo estão em progressão
geométrica. Qual é o cosseno do maior ângujlo agudo?
,
2
a) Utilize o desenho ao lado para
sen
mostrar que tg
.
2 1 cos
b) Calcule as funções trigonométricas
para o ângulo de
.
12
9.12. Se 0 < <
9.13. Fazendo tg
1
2
2
t , e usando o exercício anterior, mostre que.
2
2t
.
1 t 2
1 t 2
b) cos
.
1 t 2
2t
c) tg
.
1 t 2
a) sen
9.14. Sabendo que sen. cos
177
2
, 0 , calcule tg .
5
2
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
e > :
2
a) sen (+) = sen .cos + sen .cos . Para isso utilize o primeiro
desenho abaixo.
b) sen ( – ) = sen .cos – sen .cos . Para isso utilize o segundo
desenho abaixo.
9.15. Deduza as seguintes fórmulas, onde 0 < , <
1
1
9.16. Demonstre que os valores do seno e do cosseno de um ângulo
independem da semicircunferência utilizada para defini-los.
9.17. Utilize os ângulos para os quais já foram calculadas as funções
trigonométricas, juntamente com os exercícios anteriores para
calcular valores das funções trigonométricas para os ângulos
19 9 5 4 3 7 2 3
(em graus, 171o, 162o, 150o, 144o, 135o,
, , , ,
, ,
,
20 10 6 5 4 10 3 5
126o, 120o, 108, respectivamente).
9.18. Definimos as funções secante, cossecante e cotangente de um
1
1
1
ângulo medindo por sec
, cossec
e cot g
,
tg
cos
sen
respectivamente, desde que cos , sen e tg sejam definidas e
diferente de zero. Mostre que:
a) 1 + tg2 = sec2 .
b) 1 + cotg2=cos sec2 .
9.19. Calcule a área do triângulo em função de dois lados e do seno da
medida do ângulo compreendido pelos mesmos.
178
9. Trigonometria
9.20. Mostre que a área de um triângulo ABC pode ser expressa como
função de seus lados e do raio r da circunferência circunscrita. Mais
AB.BC. AC
exatamente, temos A
.
4r
179
Capítulo 10: Incidência e Ordem no Espaço
A partir deste capítulo estudaremos o universo tridimensional
da Geometria Espacial e observaremos diversos tipos de limitações. A
principal delas é que somos também tridimensionais e isto nos impede
de enxergar os objetos geométricos tridimensionais por inteiro a
partir de um ponto de observação fixo. O quadrado pode ser visto
inteiramente desenhado no plano43, mas o cubo, não poderá ser visto
por inteiro, algumas de suas arestas e faces estarão ocultas. Sendo
nossos modelos dos objetos tridimensionais, representados no plano
do papel (ou do quadro negro) é impossível ter fidelidade de medidas,
pois suas representações fazem uso de perspectivas, projeções, etc,
que distorcem ângulos e comprimentos.
B
Por exemplo, ao afirmarmos que
num triângulo equilátero as medianas
rela-tivas a quaisquer lados, também são
alturas, mesmo sem saber demonstrar tal
fato, podemos convencer um estudante
A
C
fazendo o desenho (a) ao lado. Mas
(a)
convencê-lo que um tetraedro regular
ABCD, tem altura com um dos extremos
no circuncentro da base será impossível
através o desenho (b) ao lado. Assim, é
mais fácil convencer os estudantes da
necessidade de uma formu-lação mais
rigorosa da geometria espacial que da
geometria plana.
Como fizemos um estudo axiomático da geometria plana,
vamos admitir conhecidos todos os resultados vistos, aplicados a cada
plano do espaço, juntamente com as notações empregadas.
43 Veja que se morássemos no plano não conseguiríamos enxergar o quadrado por
inteiro a partir de um ponto de observação fixo no plano. Para vê-lo inteiro teríamos que nos
deslocar em torno dele, que é o que fazemos no espaço tridimensional para poder enxergar
todo o cubo.
10. Incidência e Ordem no Espaço
Faremos aqui apenas as propriedades adicionais que deverão
exprimir as relações fundamentais de pontos, retas e planos no
espaço. Assim as noções primitivas, tais como ponto, reta e plano,
serão admitidas novamente aqui. Os axiomas I.1 e I.2 da Geometria
Plana aparecem aqui de uma maneira completa.
Começaremos com o primeiro grupo de axiomas e uma parte
destes já foi considerada na axiomatização da Geometria Plana.
10.1. Axiomas de Incidência
Os próximos axiomas pertencem ao primeiro grupo de
axiomas denominado, axiomas de incidência. Podemos através deles
obter os primeiros resultados da geometria espacial.
Axioma I.3 (de existência) :
a) Existe ponto.
r
A
b) Existe reta e qualquer que seja a reta,
existem pontos que pertencem à reta e
pontos que não pertencem à reta.
O ponto A
A reta r
c) Existe plano e qualquer que seja o plano, existem pontos que pertencem ao
plano e pontos que não pertencem ao
plano.
Axioma I.4 (de determinação) :
r
a) Dados dois pontos distintos no espaço,
existe uma única reta que contém estes
pontos.
b) Dados três pontos não colineares no
espaço, existe um único plano que contém
estes pontos, que denotaremos por
pl(ABC).
181
A
B
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
A primeira notação nova que utilizaremos aqui é a notação de
plano. Utilizaremos para representar planos as letras gregas
maiúsculas , , ..... Apenas para facilitar, abreviaremos no texto a
palavra Geometria Plana, por G.P.
Proposição 10.1: Se uma reta tem dois de seus pontos em um plano,
então ela está contida inteiramente neste plano.
Demonstração: Sejam A e B dois pontos
de uma reta contida num plano ,
conforme desenho ao lado. Sabemos da
G.P. que existe uma única reta r em que
passa por A e B. O Axioma I.4.a) garante
que no espaço existe uma única reta que
contém A e B, então esta reta só pode ser
r.
A Proposição 10.1 em muitos livros aparece como um axioma,
e ele é denominado axioma da inclusão, aqui foi possível demonstrálo, porque admitimos conhecidos resultados de G.P.
Corolário 10.2: Existem no máximo três posições relativas para uma
reta e um plano,
a reta está contida no plano;
a reta tem exatamente um ponto em comum com o plano;
a reta não tem ponto em comum com o plano.
Demonstração: Sejam r uma reta e um plano. Consideremos r e
como um conjunto de pontos. Analisemos os possíveis casos de
interseções de conjuntos. Temos três situações:
Se r for um conjunto com mais de um elemento, r
terá no mínimo dois pontos, assim segue da Proposição 10.1
que a reta está contida no plano.
Se r tiver apenas um elemento, então apenas um ponto
pertence a reta e ao plano.
Se r = não existem elementos em comum entre a reta e
o plano.
182
10. Incidência e Ordem no Espaço
Assim fica demonstrado que existem apenas as possibilidades
apresentadas nos itens a), b) e c).
No caso b) do Corolário 10.2 diremos que a reta e o plano são
secantes ou concorrentes e, para demonstrar a existência de reta e
planos secantes, basta tomar um ponto A do plano e um ponto B fora
dele, conforme Axioma I.3.c, e considerar a reta AB. No caso c)
diremos que a reta e o plano são paralelos e, no Capítulo 11, veremos
que também este último caso é possível ocorrer.
Exemplos
10.1. Estamos em condições de construir o primeiro sólido geométrico
espacial: a pirâmide. Em primeiro lugar, observemos que se um
conjunto de pontos A1, A2, ..., An estão contidos
num plano então, pela Proposição 10.1,
os segmentos A1A2, A2A3, ..., An-2An-1, An-1An,
também estão contidos em , ou seja, a
figura dada por estes pontos e estes
segmentos formam uma poligonal P
inteira-mente contida no plano. Se a
poligonal for um polígono diremos que P é
B
um polígono plano. Existem polígonos no
espaço que não são planos. Para obtê-los é
necessário considerar um conjunto de
pontos do espa-ço que não estejam
A
contidos num mesmo plano. Este tipo de
C
polígono é denominado reverso. A
D
Quadrilátero reverso
existência de polígonos reversos é
garantida pelo Axioma I.3.c. Considere um
183
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
polígono plano P = A1A2...An e V um ponto exterior ao plano α, que existe pelo Axioma
I.3.c. Traçamos os segmentos VA1, VA2,
...,VAn. Cada dois vértices consecutivos de P
determinam com V um triângulo. Os triângulos A1A2V, A2A3V, , AnA1V, juntamente
com o polígono P, formam uma figura geométrica espacial denominada figura piramidal de base P e vértice V.44 A superfície
piramidal é a reunião das regiões triangulares A1A2V, A2A3V, , AnA1V,
juntamente com a região poligonal determinada por P. A pirâmide é o
conjunto de todos os segmentos de extremidades V e X, onde X
pertence a região poligonal determinada por P. Nas pirâmides, as
arestas são os segmentos com extremidades V, A1, A2, , An. As
arestas que contém V são chamadas arestas laterais. Os vértices são
os pontos V, A1, A2,...,An, as faces laterais são as regiões triangulares
determinadas por VA1A2, VA2A3, , VAn-1An, VAnA1 e a região
determinada por A1A2An é denominada base. A reunião das faces
laterais é denominada superfície lateral. A reunião das faces laterais
com a base é denominada superfície total ou piramidal. Uma
pirâmide possui uma base, n faces laterais, n arestas laterais, 2n
arestas. Conforme a base, a pirâmide recebe alguns nomes:
V
V
V
V
A3
A1
B2
A2
Pirâmide
triangular
B1
ou
B4
B3
A6 A
5
A1
A4 A1
A2
Pirâmide quadrangular:
A3
A4
A2
A3
Pirâmide hexagonal:
44Há uma certa despreocupação com o nome que damos às principais figuras
geométricas espaciais. Quando se fala em pirâmide pode-se estar falando tanto em sua
superfície quanto em sua região interna ou mesmo em sua estrutura de vértices e arestas. Neste
texto, daremos nomes diferentes para estas três coisas. A figura piramidal é constituída pelos
vértices e arestas, a superfície piramidal é constituída pelas regiões determinadas pelos
polígonos e a pirâmide é a região delimitada pela superfície piramidal incluindo ela.
184
10. Incidência e Ordem no Espaço
tetraedro: quando a base é um quando a
triângulo.
quadrilátero.
base
é
um quando a base é um hexágono.
As pirâmides são um caso particular de sólidos geométricos
denominados poliedros, que serão estudados no Capítulo 15.
10.2. Por definição, a circunferência é uma figura plana. Seguindo o
mesmo raciocínio da pirâmide construiremos outra figura geométrica
espacial. Considere uma circunferência C num plano e V um ponto
exterior a , que existe pelo Axioma I.3.c.
Traçamos os segmentos VA, onde A
perten-ce a C. O conjunto de todos estes
segmen-tos juntamente com o círculo
determinado por C, formam uma figura
geométrica
espa-cial
denominada
superfície cônica circular de base C e
vértice V. O cone é o conjunto de todos os
segmentos de extremidades V e X, onde X
são pontos pertencentes ao círculo C. Os
principais elementos do cone são:
Base: O circulo C de centro O e raio r.
As geratrizes: Os segmentos com uma
extremidade em V e a outra na
circunferência fronteira de C.
Vértice: O ponto V.
Superfície lateral: É a reunião das geratrizes.
Observe que não existe uma estrutura cônica semelhante ao
que ocorre com a figura piramidal. De fato, a figura piramidal está
caracterizada pelos vértices (o vértice V e os vértices do polígono) e
por segmentos determinados por eles. Por outro lado, definimos a
super-fície piramidal dada pelas regiões triangulares juntamente com
a região poligonal.
185
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
10.2. Determinação de Planos
Apresentaremos nesta seção as condições necessárias para a
determinação de um plano.
Proposição 10.3: Se uma reta r e um ponto A são tais que A r, então
eles determinam um único plano.
Demonstração: (Existência) Tomamos em
r dois pontos distintos B e C. Pelo Axioma
I.4.c, existe um único plano contendo A,
B e C (por hipótese, não são colineares).
Pela Proposição 10.1, r está contido em .
(Unicidade) O plano contém A, B e C. Seja
’ um plano que contém A e r. Como B e C
foram tomados em r, temos que ’ contém
os pontos A, B e C, e assim pelo Axioma I.4.c, = ’.
Denotaremos o plano determinado por uma reta r e um ponto
A por pl(r,A).
Definição 10.4: Se duas retas tem interseção em um único ponto A,
dizemos que essas retas são concorrentes em A.
Proposição 10.5: Se duas retas r e s são concorrentes num ponto A,
então elas determinam um único plano.
Demonstração: (Existência) Sejam B um
ponto de r e C um ponto de s, distintos de
A, conforme desenho ao lado. Pelo Axioma
I.4.b), existe um único plano contendo A,
B e C. Como A e B são pontos de r, A e C
são pontos de s, pela Proposição 10.1, r e s
pertencem a .
(Unicidade): Se ’ contém r e s, então ’ contém A, B e C. Logo, pelo
Axioma I.4.b), temos = ’.
186
10. Incidência e Ordem no Espaço
Denotaremos o plano determinado por duas retas r e s concorrentes por pl(r,s).
Definição 10.6: Duas retas no espaço são ditas paralelas quando não
tem ponto em comum e estão contidas num mesmo plano. Duas retas
são reversas, se não existe plano contendo essas duas retas. Quando
duas retas retas r e s forem paralelas escreveremos r // s.
r
r
s
Retas paralelas
s
Retas reversas
Segue da Definição 10.6, que as retas reversas não tem
interseção e que duas retas paralelas r e s determinam um plano,
onde “determinar” significa que é único. Deixamos como exercício a
verifica-ção desta afirmação (Exercício 10.2). Ainda não está garantida
a existên-cia de retas reversas, isto será visto posteriormente.
Pelo que vimos anteriormente, existem quatro maneiras de se
determinar um plano:
1. Através de três pontos não colineares - Axioma I.4.b).
2. Através de uma reta e um ponto fora dela - Proposição 10.3.
3. Através de duas retas concorrentes - Proposição 10.5.
4. Através de duas retas paralelas - Definição 10.6.
1.
2.
3.
4.
187
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
10.3. Axioma de Ordem
O próximo teorema garante a validade do Axioma VI no
espaço.
Teorema 10.7: Por um ponto A fora de uma reta r pode-se traçar uma
única reta paralela a r.
Demonstração: Pela Proposição 10.3
existe um único plano determinado por r
e A. Seja s a paralela a r em , passando
por A. Suponhamos que exista no espaço
uma outra reta s’ passando por A e paralela
a r. Logo, por definição, existe um plano ’
que contém r e s’. Mas A s’ por
construção, e
assim, ’ contém r e A, e portanto coincide com . Pelo Axioma VI, ou
seja, o quinto postulado de Euclides, s coincide com s’.
Acrescentaremos agora mais um axioma no segundo grupo de
axiomas que são os axiomas de ordem. Antes necessitamos alguns
conceitos.
Definição 10.8: Consideremos um plano e
dois pontos A e B não pertencentes a
(existem pelo Axioma I.3.c). Diremos que A
e B estão do mesmo lado em relação ao
plano , se o segmento AB não intercepta
. Caso contrário, diremos que A e B estão
em lados opostos em relação ao plano ,
O conjunto de todos os pontos de e de
todos os pontos que estão do mesmo lado
que A em relação ao plano é chamado
semi-espaço determinado por contendo
A e será denotado por E, A.
188
10. Incidência e Ordem no Espaço
A.
Em lados opostos
.
.B
Axioma II.3: Um plano determina exatamente dois semi-espaços
distintos, cuja interseção é o plano .45
Exemplos
10.3. Utilizando o Teorema 10.7 e o Axioma II.3 construiremos o
terceiro sólido geométrico espacial bastante conhecido: o
paralelepípe-do ou hexaedro. Consideremos três segmentos não
coplanares AB, AD e AE, que existem, pelo Axioma I.3.c. Pelo Axioma
I.4.b, A, B e D; A, B e E; A, D e E, determinam três planos distintos.
Conduzimos por B
e D, retas paralelas a AD (que chamamos
de r) e a AB (que chamamos de s)
respectiva-mente, obtendo assim um
paralelogramo ABCD (pela definição de
paralelogramo), onde C = r s. A seguir
traçamos três paralelas a reta AE,
passando por B, C e D, tomando
segmentos sobre estas retas com a
mesma medida de AE, no semi-espaço
determinado pelo plano pl(ABD) e o ponto
E, medidos a partir dos pontos B, C e D; os
outros extremos destes segmentos assim
obtidos denominamos F, G e H, respectivamente.
Finalmente,
traçamos
os
45
Podemos dizer que este axioma ordena os pontos do espaço em duas classes, por
isso estamos colocando-o no grupo dos axiomas de ordem.
189
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
segmentos EF, FG, GH e HE. Estes
segmentos se situam no mesmo plano, já
que as retas EF e GH são paralelas, pois
ABFE e CDHG são parale-logramos46. A
intersecção
dos
semi-espaços
determinados por cada um dos
paralelogra-mos e um vértice não
pertencente a eles, é denominada
paralelepípedo ou hexaedro. Observamos
que a figura formada pelos vértices e
segmentos determinam três obje-tos
distintos: a estrutura em si, a superfície
formada pelos paralelogramos e o sólido47 que é o paralelepípedo. O
paralelepípedo é um outro caso particular de poliedro.
10.4. A construção do exemplo anterior
garante a existência de retas reversas. As
retas definidas pelas arestas AE e BC, por
exemplo, são reversas, pelo fato que, por
construção, E não pertence ao único plano
que contém A, B e C, o que mostra que as
retas AE e BC não estão situadas em um
mesmo plano.
E
C
A
B
Os sólidos geométricos apresentados até agora são: as pirâmides, os cones circulares e os paralelepípedos. Quando falamos destes
sólidos estamos falando, na realidade, de classes de sólidos geométricos. De fato, podemos construir infinitas pirâmides, infinitos cones e
infinitos paralelepípedos utilizando os procedimentos de construção
dados, que dependem dos planos, dos segmentos e dos pontos
considerados. Na verdade, assim como os tetraedros são uma
subclasse das pirâmides, os paralelepípedos são uma subclasse de
46 O quadrilátero ABFE é um paralelogramo pois como BF foi tomado paralelo a AE e
de mesmo comprimento, temos AE BF e AE // BF. Assim, os segmentos AE e BF são coplanares e
portanto, pelo item a) da Proposição 5.11, ABFE é um paralelogramo. De maneira análoga
conclui-se que CDHG é um paralelogramo.
47 A noção de sólido é um conceito primitivo e surge ao imaginarmos regiões do
espaço, assim como consideramos as regiões no plano.
190
10. Incidência e Ordem no Espaço
uma outra classe denominada prisma, que será apresentada no
próximo capítulo.
Estes exemplos permitem separar os sólidos em duas classes
distintas: os sólidos que rolam e os sólidos que não rolam. Os
primeiros são também denominados corpos redondos48. A segunda
classe constitui exatamente do complementar da primeira classe.
Assim temos o diagrama a seguir:
hexaedros
prismas
tetraaedros
pirâmides
Corpos que não rolam
Cones circulares
Corpos que rolam
sólidos
10.4. Ângulos entre Retas
O Teorema 10.7 permite definir ângulos entre retas quaisquer
no espaço.
Definição 10.9: Se duas retas são paralelas então a medida do ângulo
entre elas é zero. Se duas retas são concorrentes num ponto O (e
assim coplanares pela Proposição 10.5) então a medida do ângulo
entre elas é a medida do menor ângulo formado por suas semi-retas
definidas por O.
48
Temos que utilizar aqui um pouco da intuição para diferenciar entre essas duas
classes. Uma maneira seria considerar como noção primitiva a de corpo redondo.
191
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Se duas retas são reversas o ângulo entre
elas é definido pelo ângulo formado por
duas retas concorrentes, paralelas às retas
dadas. As retas do espaço que formam um
ângulo reto são chamadas retas
ortogonais. Retas perpendiculares são
retas ortogonais coplanares (portanto
concorrentes).
r
t
s
u
Para que este ângulo esteja bem definido, é necessário que ele
independa das paralelas escolhidas, e de fato isto ocorre conforme
mostra o teorema a seguir.
Teorema 10.10: Sejam (r,s) e (r’,s’) dois pares de retas concorrentes,
tais que r e r’ são paralelas entre si e, s e s’ também são paralelas entre
si, então o ângulo formado por r e s é igual ao ângulo formado por r’ e
s’.
A
s
2
Demonstração: Sejam A o ponto de interA
seção de r e s e, B o ponto de interseção de
A1
r
r’ e s’. Sobre r e s, semi-retas de menor
ângulo com vértice A, tomemos pontos A1
e A2, conforme o desenho ao lado e
s’
B2
tracemos paralelas A1B1 e A2B2 à reta AB.
B1
Por construção, A1B1B2A2, ABB2A2 e AA1B1B
B
r’
são paralelogramos. De fato, como s
contém os
pontos A e A2, s’ contém os pontos B e B2 e, por hipótese, s // s’ temos
que AA2 // BB2. Como A2B2 foi tomado paralelo a AB, por construção, temos
AB // A2B2. Logo ABB2A2 é um paralelogramo. De maneira análoga
temos que AA1B1B é um paralelogramo. Quanto ao quadrilátero
A1B1B2A2 temos A1B1 // A2B2 pois A1B1 // AB e A2B2 // AB. Como AA1B1B e
ABB2A2 são paralelogramos (provado anteriormente) temos A1B1
A2B2. Logo, pelo item a) da Proposição 5.11, A1B1B2A2 é um
paralelogramo. Assim, temos
AA1 BB1, AA2 BB2 e A1A2 B1B2.
Logo, os triângulos AA1A2 e BB1B2 são congruentes pelo caso LLL, o
que mostra que os ângulos  e B̂ são congruentes. E assim, por
192
10. Incidência e Ordem no Espaço
definição, o ângulo entre as retas r e s é congruente ao ângulo entre
as retas s’ e r’.
Teorema 10.11: Se dois planos e ’ são distintos e têm um ponto P
comum, então, a interseção desses planos é uma única reta que passa
por P.
Demonstração: (Existência) Pelo Axioma
II.3, determina dois semi-espaços E,A e
E,B, onde A e B estão em lados distintos
em relação ao plano . Como e ’ são
dois planos distintos existe um ponto Q em
’ que não está em . Pelo Axioma II.3, Q
está em um dos semi-espaços E,A ou E,B.
determinado por . Só para fixar a idéia suponhamos que Q esteja,
por exemplo, em E,A (o outro caso é análogo). Por hipótese P
’. Assim r = QP é uma reta de ’. O ponto P divide r em duas semiretas, tomemos R um ponto na semi-reta oposta a SPQ. Pela definição
de semi-espaço, R está em E,B.Seja C um ponto qualquer de ’ fora
de r (existe pelo Axioma I.3.b). Existem três possibilidades para C, ou
ele pertence aos dois semi-espaços, ou ele está apenas em E,A, ou
ele está apenas em E,B.
1º Caso : C está nos dois semi-espaços : Neste caso, temos que C está
em , e assim tomamos a reta i = PC que estará na interseção de e
’, pela Proposição 10.1.
2º Caso: C está apenas em E,A: Considere a reta s = RC, que estará
em ’ e é distinta de r, pois C não está em r. Como nesse caso C está
em E,A e R está em E,B, pela Definição 10.8, s intercepta num
ponto P’ distinto de P. Seja i = PP’ que estará na interseção de e ’,
pela Proposição 10.1.
3o Caso: C está apenas em E,B: Analogamente, se obtém P’ = QC ,
com P’ distinto de P e a construção da interseção é como no caso
anterior.
(Unicidade) Seja X ’, um ponto tal que X i, assim pela
Proposição 10.3, existe um único plano contendo i e X. Mas i e X
193
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
estão em e ’, logo = = ’, absurdo. Assim os únicos pontos da
interseção de e ’, são os pontos de i.
Corolário 10.12: a) Para obter a interseção de dois planos distintos, é
suficiente encontrar dois pontos distintos comuns a esses planos.
b) Três ou mais pontos são colineares, quando são comuns a dois
planos distintos.
Demonstração: a) Sejam A e B dois pontos comuns a dois planos e
’. Pelo Teorema 10.11, se encontrarmos dois pontos comuns a e ’,
a interseção é a única reta que contém estes pontos.
b) Por definição, três ou mais pontos são colineares se pertencem a
uma mesma reta. Mas se três ou mais pontos pertencem a dois
planos distintos, pelo Teorema 10.11, eles pertencem à reta interseção,
logo são colineares.
10.5. Exercícios
10.1. Na Geometria Plana foi demonstrado que numa reta existem
infinitos pontos. Num plano, existem infinitas retas? No espaço,
existem infinitos planos?
10.2. Demonstre que as retas reversas não têm interseção e que duas
retas paralelas r e s determinam um plano.
10.3. Determine as posições relativas entre duas retas.
10.4. Classifique as afirmações abaixo em verdadeiras ou falsas,
justificando brevemente sua resposta (uma afirmação só é verdadeira
se ela sempre se verifica).
a) Três pontos distintos determinam um plano.
b) Três pontos distintos não são colineares.
c) Três pontos não colineares são dois a dois distintos.
194
10. Incidência e Ordem no Espaço
d) Duas retas ou são coincidentes ou são distintas.
e) Duas retas ou são coplanares ou são coincidentes.
f) Duas retas concorrentes têm um ponto em comum.
g) Duas retas concorrentes têm um único ponto comum.
h) Duas retas que têm um ponto comum são concorrentes.
i) Duas retas distintas não paralelas são reversas.
j) Duas retas que não tem ponto comum são paralelas.
l) Para obter uma reta é suficiente obter dois pontos distintos da reta.
m) Três retas distintas, duas a duas paralelas, determinam três planos
distintos.
n) Duas retas distintas determinam um plano.
o) Quatro pontos distintos e não colineares determinam um
quadrilátero reverso.
10.5. a) Quantos planos passam por uma reta? E por dois pontos
distintos? Quantos planos passam por quatro pontos distin-tos dois a
dois?
10.6. Mostre que as diagonais de um quadrilátero reverso são
reversas.
10.7. Num plano há dois pontos A e B pertencentes a uma reta r e
dois pontos C e D pertencentes a uma reta s, onde r e s são
concorrentes. Considere um ponto P fora de . Determine a
interseção entre os planos pl(A,B,P) e pl(C,D,P)?
10.8. Sejam r e s duas retas reversas. Em r há um ponto R e em s, um
ponto S. Encontre a interseção entre os planos pl(r,s) e pl(s,R).
10.9. a) Suponha que as retas que contém os lados de um triângulo
ABC, interceptam um plano em três pontos M, N e Q. Mostre que
estes três pontos são colineares.
b) Dois triângulos não coplanares ABC e A’B’C’ têm as retas AB e A’B’
concorrentes em O, AC e A’C’ concorrentes em P e BC e B’C’
concorrentes em R. Mostre que O, P e R são colineares.
195
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
10.10. Considere uma pirâmide quadrangular de base ABCD e vértice V como no
desenho ao lado. Os extremos das arestas
laterais opostas VA e VC determinam um
plano , e os extremos das arestas opostas
VB e VD determinam um plano ’.
Encontre a interseção dos planos e ’. A
(Sugestão: considere o encontro das
diagonais do quadrilátero da base).
V
D
C
B
10.11. Considere um conjunto de pelo menos três retas distintas.
Mostre que, se quaisquer duas retas deste conjunto são concorrentes,
então elas estão todas num mesmo plano ou passam todas pelo
mesmo ponto.
10.12. Duas retas r e s são concorrentes em um ponto O. Fora do plano
determinado por r e s tomamos um ponto P qualquer. Qual é a
interseção do plano definido por r e P com o plano definido por s e P?
10.13. a) Mostre que duas retas distintas paralelas a uma mesma reta
são paralelas entre si.
b) Duas retas distintas ortogonais a uma terceira reta são sempre
paralelas entre si?
10.14. Seja r uma reta qualquer e s uma reta não paralela a r. Mostre
que todas as retas paralelas a s e concorrentes com r estão contidas
no mesmo plano.
10.15. Sejam A, B, C e D pontos quaisquer do espaço. Sejam M, N, P e Q
os pontos médios de AB, BC, CD e DA, respectivamente. mostre que
MNPQ é um paralelogramo.
10.16. Mostre que os três segmentos que unem os pontos médios das
arestas opostas de um tetraedro qualquer ABCD se encontram em um
mesmo ponto.
196
10. Incidência e Ordem no Espaço
10.17. Sejam r e s duas retas reversas. Sejam A e B pontos distintos de
r, C e D pontos distintos de s. Mostre que as retas AC e BD são
reversas.
10.18. Mostre que se três planos são distintos e dois a dois secantes
segundo três retas distintas, então: ou essas retas interceptam-se
num só ponto ou elas são paralelas duas a duas.
10.19. Mostre que duas circunferências de raios iguais, centro em
comum e contidas em planos secantes têm dois pontos em comum.
10.20. Suponha que dois planos se cortam e contém, respectivamente
duas retas paralelas e distintas, mostre que a interseção desses planos
é paralela às retas.
197
Capítulo 11: Paralelismo no Espaço e suas
Conseqüências
O Corolário 10.2 garante que existem apenas três posições
possíveis para uma reta r e um plano do espaço. Se a reta possuir
dois pontos em comum com o plano, então ela estará inteiramente
contida no plano, porém como sabermos se a reta tem um ou nenhum
ponto em comum com o plano? O Teorema 10.11 estabelece que se
dois planos distintos possuir um ponto em comum então ele terá
como interseção uma reta. Existem critérios que ajudam a verificar se
dois planos distintos têm ou não pontos em comum? Neste capítulo
daremos vários resultados que respondem estas duas perguntas.
11.1. Paralelismo entre Retas e Planos
Iniciaremos com uma condição de paralelismo entre retas e
planos. Primeiramente definiremos reta paralela a plano:
Definição 11.1: Dizemos que uma reta e um plano são paralelos se eles
não possuem pontos em comum.
Teorema 11.2: Um plano e uma reta r não contida em são paralelos
se, e somente se, existe uma reta s paralela a r e contida em .
Demonstração: Suponhamos que r e
sejam paralelos. Seja A um ponto qualquer
de , e consideremos o plano ’ = pl(r,A)
(desenho ao lado). Os planos e ’ são
distintos e possuem o ponto A em comum.
Logo, pelo Teorema 10.11 eles tem uma reta
s em comum. Como r e s estão em ’, elas
são coplanares, mas r e são para-
11. Paralelismo de Retas e Planos
lelos por hipótese, logo r não intercepta s, e assim r e s são paralelas e
s está em .
Reciprocamente, suponhamos que uma
reta s de seja paralela a r. Seja ’ =
pl(r,s). Os planos e ’ são distintos (pois
r está em ’ e não está em ) e possuem a
reta s em comum. Como, por construção, r
está contida em ’, se ela cortasse o plano
, seria necessariamente um ponto da
interseção s de e ’, mas isso é
impossível,
pois r e s são paralelas. Logo, r é paralela a .
Este resultado mostra a existência de retas paralelas a planos.
Teorema 11.3: (Critério de paralelismo entre retas no espaço): Sejam
e ’ dois planos que se cortam segundo uma reta s. Se r é uma reta
de ’ e é paralela a , então r é paralela a s.
Demonstração: Como r é paralelo a ,
temos que r não intercepta . Logo r e s
não se interceptam. Como s é a interseção
dos planos e ’, s pertence a ’ e, por
hipótese, r pertence a ’. Assim temos
duas retas em ’, que não se interceptam.
Por-tanto r e s são paralelas.
199
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Exemplo
11.1. No paralelepípedo, por construção, o
segmento AD é paralelo aos segmentos EH
e BC. Logo, pelo Teorema 11.2, AD é
paralelo aos planos EFGH e BCFG.
Analogamente, se conclui com os outros
segmentos em rela-ção aos planos que não
se interceptam.
H
F
E
D
A
G
C
B
Os segmentos BC e FG são paralelos pois FG é paralelo ao plano
ABCD e BC é a interseção de ABCD e BCFG.
11.2. Paralelismo entre Planos
Vamos agora estudar o caso de paralelismo entre planos.
Definição 11.4: Dois planos são chamados paralelos se não possuem
pontos em comum.
Até agora não mostramos que pode ocorrer a existência de
dois planos paralelos. A seguinte construção tem este objetivo.
Construção:
1. Tomemos um plano e um ponto O’ fora de , que existe
pelo Axioma I.3.c.
2. Construímos em duas retas r e s, concorrentes num ponto
O. Esta construção foi feita em G.P.
3. Construímos por O’ duas retas r’ e s’ , paralelas a r e a s
respectivamente, (Axioma VI).
4. Por construção, as retas r’ e s’ são concorrentes em O’ e
portanto pela Proposição 10.5 determinam um plano ’, que
afirmamos ser paralelo a .
A demonstração de que e ’ são paralelos é dado pelo
seguinte teorema:
200
11. Paralelismo de Retas e Planos
Teorema 11.5: Se por um ponto O’ fora de um plano , conduzirmos
duas retas r’ e s’ respectivamente paralelas a duas retas r e s
concorrentes em um ponto O desse plano, então r’ e s’ determinam
um novo plano ’ paralelo ao primeiro .
Demonstração: Temos, por hipótese, que
r// r’ e s // s’. Assim, pelo Teorema 11.2, r’ e s’
são paralelas a . Suponhamos, por
absurdo, que e ’ não são paralelos.
Assim, eles se interceptam segundo uma
reta t, pelo Teorema 11.3, r’ é paralela a t e
s’ é paralela a t. Logo, por O’ existem duas
retas paralelas a uma reta, o que contradiz
o
Teorema 10.7. Assim, e ’ são paralelos.
Na verdade o Teorema 11.5 engloba os seguintes resultados:
a) Dados dois planos, se um deles contém duas retas concorrentes
respectivamente paralelas a duas retas concorrentes do outro, então
esses planos são paralelos entre si.
b) Se duas retas concorrentes de um plano são paralelas a um outro
plano, então esses planos são paralelos entre si.
Exemplo
11.2. Vamos voltar ao paralelepípedo pois as
relações de paralelismo no espaço estão
intimamente ligadas a este sólido. Por
construção, o segmento AD é paralelo ao
segmento EH e o segmento AB é paralelo
ao segmento EF. Logo, pelo Teorema 11.5,
ABCD é paralelo ao plano EFGH. Resultados
semelhantes se obtém com os outros
segmentos em relação aos outros pares de
planos.
201
H
F
E
D
A
G
C
B
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
O resultado a seguir é bastante útil.
Teorema 11.6: Dados dois planos paralelos, se r é uma reta qualquer de
um dos planos então existe uma reta s no outro plano que é paralela a
r.
Demonstração: Sejam e ’ dois planos paralelos e r uma reta qualquer de . Seja O’ um ponto qualquer de e ’ = pl(r,O’). Temos, O’
’, logo, pelo Teorema 10.11, ’ é uma reta s. Como e são
paralelos temos r // e r ’, por construção, assim pelo Teorema
11.3, r // s e s .
O próximo resultado é análogo ao axioma das paralelas para
planos:
Teorema 11.7: Por um ponto O’ exterior a um plano dado, existe um
único plano paralelo a .
Demonstração: (Existência) A existência foi feita no Teorema 11.5.
(Unicidade) Suponhamos que existam dois
2
s
t2
planos distintos 1 e 2 passando por O’ e
O’
paralelos a . Como os planos são distint1
tos e ambos passam por O’, 1 2 = s,
1
pelo Teorema 10.11. Tomamos uma reta r em
'
, tal que r não seja paralela a s. Isto é
r
possível pois basta construirmos um plano
=pl(s, A), onde A é um ponto qualquer de
e, pelo Teorema 10.11, temos = t. Tome r concorrente a t em
A, como t//s, pois s // , temos que r e s são reversas. Consideremos o
plano ’ = pl (r,O’). Como ’ passa por O’ que está em 1 2 = s,
pelo Teorema 10.11, ’ 1 = t1 e ’ 2 = t2, mas como 1 e 2 são
paralelos a , t1 e t2 são paralelas a r, passando por O’, o que é um
absurdo, pelo Axioma VI, e, assim, 1 e 2 são necessariamente
coincidentes.
202
11. Paralelismo de Retas e Planos
Teorema 11.8: Se uma reta corta um plano, corta também qualquer
plano paralelo a este. Se um plano corta uma reta, corta também
qualquer reta paralela a ela.
Demonstração: Para demonstrar a primeira parte do teorema sejam
e ’ dois planos paralelos e r uma reta que intercepta ’ em O.
Existem três possíveis posições relativas para r e . O caso de r estar
contida em é impossível pois O não está em . No caso de r ser
paralela a ,
consideramos u em paralela a r (possível
pelo Teorema 11.2) e uma reta r’ paralela a
u em ’, que é paralela a (r’ é paralela a
pois, caso contrário, existiria A r’
. Como e ’ são paralelos, teríamos um
absurdo). Mas em ’ existe uma reta r”
paralela a r’ passando por O. Assim
teremos duas paralelas a u passando por O,
o que contradiz o Axioma VI. Logo esse
caso também é impossível. Resta assim a última
possibilidade, que é o caso de r interceptar
, encerrando a primeira parte do teorema.
Para demonstrar a segunda parte, suponha
que uma reta r intercepta um plano e
seja r’ uma reta paralela a r. Considere o
plano =pl(r,r’). Como r corta , então
intercep-ta segundo uma reta s, pelo
Teorema 10.11.
Como s intercepta r, temos que s intercepta r’ (a reta s intercepta r’,
pelo Corolário 5.2, pois r, r’ e s estão no plano ). Logo r’ intercepta .
Este teorema garante que situações como as dos desenhos
abaixo não podem acontecer.
203
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Teorema 11.9: Se um plano corta um plano segundo uma reta r,
ele corta um plano ’ paralelo a segundo uma reta paralela a r.
Demonstração: Temos que é distinto
de ’ ( corta um plano paralelo a ’) e
não é paralelo a ’, pois caso contrário por
um ponto qualquer de r, passariam dois
planos paralelos a ’, que é um absurdo
pelo Teorema 11.7. Logo, corta ’
segundo uma reta s. Mas, r e s estão em
e não possuem pontos em comum, pois e ’ são paralelos por hipótese,
então r e s são paralelos por definição.
O desenho ao lado ilustra uma situação que
este teorema não permite que ocorra.
Exemplos
11.3. Utilizando os resultados até aqui apresentados é possível construir
os prismas, uma classe de sólidos geométricos interessante e que está
204
11. Paralelismo de Retas e Planos
muito presente em nosso cotidiano49. Sejam A1A2...An um polígono
contido em um plano e B1 um ponto qualquer não pertencente a .
Por B1
traçamos o único plano ’ paralelo a .
Pelos demais vértices A2, ..., An traçamos
retas paralelas a A1B1 que, pelo Teorema 11.8
cortam ’ nos pontos B2, ..., Bn, respectivamente.
Tomemos
dois
segmentos
consecuti-vos assim determinados, por
exemplo, A1B1 e A2B2. O quadrilátero
A1B1B2A2 é plano, pois por construção, A1B1
é paralelo a A2B2. Mas
isso significa que os outros dois lados A1A2 e B1B2 também são
paralelos, pois estão contidos em planos paralelos. Portanto, por
definição, o quadrilátero é um paralelogramo e o polígono B1B2...Bn é
congruente ao polígono A1A2...An. Os paralelogramos assim
determina-dos, juntamente com os polígonos A1A2...An e B1B2...Bn
determina uma figura geométrica espacial denominada figura
prismática. A superfície prismática é a reunião das regiões poligonais
determinadas pelos paralelogramos e pelos polígonos. O prisma é a
reunião de todos os segmentos XY, onde X pertence a região
poligonal determinada por A1A2...An e Y é a interseção da reta paralela
a A1B1 com o plano ’. Os pontos Ai e Bi, onde i varia de 1 a n, são
denominados vértices. As regiões determinadas pelos polígonos
A1A2...An e B1B2...Bn são denominadas bases. As regiões determinadas
pelos paralelogramos são denominadas faces laterais. Os segmentos
AnBn, AnA1, BnB1, AiBi, AiAi+1 e BiBi+1, onde i varia de 1 a n-1, são
denominados arestas. Os segmentos AiBi, onde i varia de 1 a n, são
denominados arestas laterais. Os segmentos determinados por
vértices pertencentes a faces distintas são denominados diagonais.
Um prisma possui 2 bases, n faces laterais, n arestas laterais e 3n
arestas. Conforme a base o prisma recebe alguns nomes:
49
Caixas longa vida, embalagens de mercadorias, etc.
205
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Prisma triangular: quando a
Prisma quadrangular: quando a Prisma hexagonal: quando a
base for um triângulo.
base for um quadrilátero.
base for um hexágono.
Os prismas formam uma subclasse da classe de sólidos geométricos
denominada poliedros, que serão estudados no Capítulo 15.
Um caso particular de prisma ocorre
quando a base é um paralelogramo, no
qual obtemos um paralelepípedo que já foi
construído
anteriormente.
Existem
também os prismas construídos a partir de
uma base não convexa. O desenho ao lado
apresenta um prisma cuja base é um
octógno não convexo. A seção de um
prisma é um polígono plano que contém
exatamente um
vértice em cada aresta lateral do prisma. Quando o plano da seção de
um prisma é paralelo aos planos das bases, a seção é congruente as
bases. Deixamos como exercício a prova desta afirmação (Exercício
11.11). A reunião de todas as faces laterais é denominada superfície
lateral do prisma. A reunião da superfície lateral com as regiões
poligonais das bases é denominada superfície do prisma.
11.4. Seguindo a mesma construção do exemplo anterior, o que
faremos agora é considerar uma circunferência ao invés de um polígono. Os conceitos de cilindro e prisma são originados de um conceito
mais geral que é o de superfície cilíndrica regrada. Este conceito
depen-de exclusivamente do conceito de curva, o qual não temos
elementos suficientes para apresentá-lo. Sendo assim, falaremos
apenas sobre um caso particular, que são as superfícies cilíndricas
circulares. Considere-
206
11. Paralelismo de Retas e Planos
mos uma circunferência C, situada num
plano e B um ponto qualquer não pertencente a . Por B traçamos o único plano
’ paralelo a e uma reta s interceptando
o plano . Os pontos de interseções das
retas paralelas a s passando por C formam
uma circunferência congruente a C’
Deixaremos
como
exercício
a
demonstração
desta afirmação (Exercício 11.18). A superfície cilíndrica é a reunião de
todos os segmentos paralelos a s com uma extremidade em C e outra
em C’. O cilindro é a reunião de todos os segmentos paralelos a s com
uma extremidade no círculo determinado por C e outra no círculo
determinado por C’. Os principais elementos do cilindro são:
Duas bases: São os círculos congruentes situados nos planos
paralelos e ’.
Geratrizes: São os segmentos paralelos à reta s dada que
passam por C.
Superfície lateral: É a reunião dos segmentos cujas
extremidades estão nas circunferências bases.
Superfície Cilíndrica: É a reunião da superfície lateral com as
bases.
11.3. Teorema de Tales
O Teorema de Tales pode ser generalizado para planos:
Definição 11.10: Um conjunto de planos distintos, todos paralelos entre
si, é chamado feixe de planos paralelos. Uma reta que intercepta
todos os planos de um feixe de planos paralelos é chamada
transversal desse feixe. Dois segmentos que estão entre dois planos
escolhidos de um feixe de planos paralelos e cada um desses
segmentos com uma extremi-dade nesses dois planos, são chamados
segmentos correspondentes.
207
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Teorema 11.11: (de Tales para planos): Se um feixe de planos paralelos
tem duas transversais, então, a razão entre dois segmentos quaisquer
de uma é igual a razão entre os segmentos correspondentes da outra.
Demonstração: Se as duas transversais
são coplanares, a demonstração recai no
mesmo teorema da G.P. que foi visto. Se as
duas transversais r e s são reversas,
construímos uma reta r’ concorrente com r
e paralela a s (basta tomar em r um ponto
P qualquer, e pelo Teorema 10.7, existe
uma única reta paralela a s que contém P).
O resultado agora segue aplicando duas
vezes o Teorema de Tales da G.P. e a
transitividade.
Exemplos
11.5. Consideremos uma pirâmide de base
A1A2...An e vértice V. Tracemos um plano
paralelo à base, que corta as arestas
laterais da pirâmide segundo o polígono
B1B2...Bn e que divide a pirâmide em dois
sólidos: um deles é a pirâmide de base
B1B2...Bn com vértice V e o outro chamado
tronco de pirâmide de bases A1A2...An e
B1B2...Bn. Notemos que se traçamos por V
um outro plano paralelo a base A1A2...An ,
teremos um feixe de três planos paralelos
cortado pelas transversais VA1, VA2, ..., VAn
e assim podemos utilizar o teorema de
Tales para concluir que:
VB1 VB2
VBn
...
k.
VA1 VA2
VAn
Dizemos então que as duas pirâmides
obtidas são semelhantes com razão de
208
V
B4
B1
B3
B2
A4
A3
A2
A1
V
B4
B1
B3
B2
11. Paralelismo de Retas e Planos
semelhança k. Temos também que o plano
da base e o plano (paralelos) são
cortados
B4
B3
B2
B1
A4
A1
A3
A2
tronco de pirâmide
Pelos planos pl(VA1A2), pl(VA2A3), , pl(VAnA1) e para cada um dos planos transversais temos, pelo Teorema 11.9, que as interseções são
retas paralelas, a saber, B1B2 // A1A2, B2B3 // A2A3, , BnB1 // A2A1. Assim
teremos que VB1B2 ~ VA1A2, VB2B3 ~ VA2A3, , VBnB1 ~ VAnA1. Logo,
B1B2
BB
BB
2 3 ... n 1 , donde segue que as bases do tronco da
A1A2 A2 A3
An A1
pirâmide mantém a razão de semelhança k.
11.6. Consideremos um cone cuja base é
uma circunferência C de centro O e raio r,
com vértice V, conforme definido no
Exemplo 10.1. Tracemos um plano ’
paralelo ao plano da base que intercepta
o cone num ponto distinto de V. Afirmamos
que a interseção de ’ com o cone é uma
circunferência. De fato, seja P um ponto
qualquer de C e consideremos as retas OV e
VP. Pelo Teorema 11.8 OV intercepta ’
num ponto O’ e VP intercepta ’ num
ponto P’. Como O’ e P’ pertencem ao plano
pl(OPV), e ’ são paralelos, temos que
OP e O’P’ são paralelos e portanto, os
triângulos OPV e O’P’V são semelhantes.
OP OV
Assim,
ou
seja,
k,
O' P' O' V
OP k.O'P' . Como
V
O r
V
’
O’ P’
O r
P
V
Como P está em C, temos que OP= r e, portanto, a distância entre O’ e
P’ é sempre a mesma independentemente do ponto P. Assim, por
definição, a interseção de ’ com o cone é uma circunferência C’ de
209
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
centro O’ e raio O'P' . O cone original fica dividido então em duas
partes, um cone com base C’ e vértice V e outra parte chamada tronco
de cone com bases C e C’. Dizemos então que os dois cones obtidos são
semelhantes com razão de semelhança k.
11.4. Exercícios
V
11.1. Considere uma pirâmide VABCD, em
que a base ABCD é um paralelogramo.
Mostre que a reta CD é paralela ao plano pl
(VAB).
D
C
A
B
H
11.2.
Considere
um
paralelepípedo
ABCDEFGH. Mostre que a interseção r dos
planos pl (AE,CG) e pl (BF,DH) é paralela a
reta AE.
F
E
D
A
G
C
B
11.3. Mostre que uma reta é paralela a dois planos secantes se, e
somente se, ela é paralela à reta de interseção dos dois planos.
11.4. Suponha que três planos , e , tenha exatamente um ponto
em comum. Mostre que não existe nenhuma reta simultaneamente
paralela a , e .
11.5. Sejam r e s duas retas reversas. Construa, justificando a
construção, um plano contendo r e paralelo a s.
210
11. Paralelismo de Retas e Planos
11.6. Construa por um ponto A, um plano paralelo a duas retas não
paralelas r e s. Justifique a construção. Esta construção é sempre
possível?
11.7. Dadas três retas r, s e t, reversas duas a duas, construa se possível
(justificando a construção) uma reta paralela a t e que intercepta r e s.
Quando é impossível?
11.8. Classifique as afirmações abaixo em verdadeiras ou falsas,
justificando brevemente sua resposta:
a) Dadas duas retas reversas, qualquer reta que encontra uma,
encontra a outra.
b) Se dois planos têm um ponto comum, então eles têm uma reta
comum que passa pelo ponto.
c) Dois planos que tem uma reta comum são secantes.
d) Se dois planos são secantes, então toda reta de um encontra o
outro.
e) Duas retas distintas reversas a uma terceira são reversas entre si.
f) Duas retas reversas e uma concorrente com as duas determinam
dois planos.
g) Se duas retas são paralelas entre si e um plano contém uma, então
ele é paralelo ou contém a outra.
h) Se duas retas distintas são paralelas a um plano, então elas são
paralelas entre si.
i) Dadas duas retas distintas, sempre existe um plano contendo uma
e paralelo à outra.
j) Se uma reta é paralela a um plano, ela não é paralela a todas as
retas do plano.
k) Se uma reta é paralela a um plano, ela é paralela a infinitas retas
do plano.
l) Dados uma reta e um plano, sempre é possível traçar no plano
uma reta paralela à reta dada.
m) Uma condição necessária e suficiente para uma reta ser paralela a
um plano é ser paralela a uma reta do plano e não estar nele.
n) Uma condição necessária e suficiente para que dois planos
secantes sejam paralelos a uma reta ou a contenha é essa reta ser
paralela à interseção.
211
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
11.9. Se dois planos são paralelos, mostre que cada reta de um é
paralela ao outro.
11.10. Mostre que todas as arestas laterais do prisma são paralelas e de
mesmo comprimento.
11.11. Mostre que as bases do prisma são congruentes. Mais
geralmente, quando o plano da seção de um prisma é paralelo aos
planos das bases, a seção é congruente as bases.
11.12. Classifique as afirmações abaixo em verdadeiras ou falsas,
justificando brevemente sua resposta:
a) Se uma reta é paralela a dois planos então esses planos são
paralelos.
b) Por uma reta dada pode-se conduzir um plano paralelo a um plano
dado.
c) Por qualquer ponto é possível conduzir uma reta que se apoia em
duas retas reversas dadas.
d) Dadas duas retas reversas, sempre existe reta que se apoia em
ambas.
e) Dadas duas retas reversas, qualquer plano que passa por uma
encontra a outra.
f) Uma condição suficiente para que dois planos sejam paralelos é
que duas retas de um sejam paralelas ao outro.
g) Se duas retas concorrentes de um plano são respectivamente
paralelas a duas retas de outro plano, então esses planos são
paralelos.
h) Se dois planos são paralelos, então toda reta de um é paralela a
qualquer reta do outro.
i) Se dois planos são paralelos, toda reta paralela a um é paralela ou
está contida no outro.
j) Se dois planos são paralelos, toda reta que tem um ponto comum
com um, tem um ponto comum com o outro.
11.13. Mostre que dois pares de planos secantes, respectivamente
paralelos, têm interseções paralelas.
212
11. Paralelismo de Retas e Planos
11.14. Seja um tetraedro qualquer, no qual A’, B’, C’ e D’ são os
baricentros das faces opostas aos vértices A, B, C e D. Mostre que as
retas AA’ e BB’ são concorrentes num ponto X e que este ponto é tal
XA' XB' 1
. Conclua que as retas AA’, BB’, CC’ e DD’ se
que
XA XB 3
encontram no ponto X.
11.15. Seja P um ponto exterior a um plano . Para cada ponto Q de
XP
k . Qual é
seja X o ponto do segmento PQ que o divide na razão
XQ
o lugar geométrico do ponto X quando Q percorre o plano .
11.16. Dada uma reta r secante a um plano e um ponto P que não
está em r nem em , construir um segmento cujos extremos estão em
r e , e cujo ponto médio seja P.
11.17. Dadas as retas reversas r, s e t, encontrar uma reta que as
encontre nos pontos R, S e T, respectivamente, de modo que S seja
ponto médio de RT.
11.18. Consideremos uma circunferência C, situada num plano e B um
ponto qualquer não pertencente a . Por B traçamos o único plano ’
paralelo a e uma reta s interceptando o plano . Mostre que os
pontos de interseções das retas paralelas a s passando por C formam
uma circunferência congruente a C’.
11.19. Duas retas r e s são paralelas. Sejam A e B dois pontos fora do
plano pl(r,s). Estudar a interseção t dos planos pl(A,a) e pl(B,b).
11.20. Dados um plano , uma reta r não paralela a e um ponto P
que não pertence nem a r nem a , trace uma reta concorrente r,
paralela a que passe por P.
213
Capítulo 12: Perpendicularismo no Espaço e suas
Conseqüências
Neste
capítulo
introduziremos
o
conceito
de
perpendicularismo entre retas e planos. Uma das construções
fundamentais talvez seja a de conduzir uma reta perpendicular a um
plano por um ponto (ou o seu caso dual, que é o de conduzir um plano
perpendicular a uma reta). Aqui mostraremos que é possível tal
construção. Veremos também sob que condições dois planos são
perpendiculares.
12.1. Perpendicularismo entre Retas e Planos
Iniciaremos com a definição de perpendicularismo entre retas
e planos:
Definição 12.1: Dizemos que uma reta é perpendicular a um plano
quando ela é ortogonal a toda reta contida no plano. A interseção P
de uma reta perpendicular a um plano é chamada traço da
perpendicular ao plano.
Podemos determinar o perpendicularismo entre reta e plano
através de uma condição equivalente:
12. Perpendicularismo de Retas e Planos
Proposição 12.2: Uma reta é perpendicular a um plano se, e somente
se, ela é perpendicular às retas de que passam pelo seu traço.
Demonstração: Se uma reta é perpendicular a um plano então por
definição ela é ortogonal a toda reta contida no plano, assim, em
particular, ela é perpendicular às retas de que passam pelo seu
traço. Reciprocamente, seja r uma reta que é perpendicular a todas as
retas de que passam pelo seu traço P. Dada uma reta qualquer s de
, consideremos s’, a reta por P paralela a s. Por hipótese r é
perpendicular a s’, assim por definição de reta ortogonal, s é
ortogonal a r. Como s é qualquer, temos por definição que r é
perpendicular a .
Exemplo
12.1. Na construção civil se você tiver uma superfície plana nivelada e
segurar um prumo, o barbante se esticará formando uma
perpendicular com a superfície plana.
É claro que a caracterização de reta perpendicular a plano
dada na Proposição 12.2 é mais fácil de ser utilizada e muitas vezes
assim será feito.
Proposição 12.3: Se uma reta r e um plano são perpendiculares
entre si, então:
a) Toda reta r’ paralela a r é perpendicular a ;
b) Todo plano ’ paralelo a é perpendicular a r.
Demonstração: a) Sabemos que se r é
perpendicular ao plano no traço A então,
pela Proposição 12.2, r é perpendicular a
todas as retas de que passam por A. Seja
A’ o traço de r’ com . Seja s’ uma reta de
passando por A’, então existe uma reta s
pas215
r
A
r’
A’ s’
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
sando por A paralela a s’, que é perpendicular a r. Pelo Teorema
10.10,temos que r’ e s’ são perpendiculares entre si. Como s’ foi
tomada arbitrariamente, temos que toda reta em , passando por A’
é perpendicular a r’ e assim pela Proposição 12.2, temos que r’ é
perpendicular a .
r
b) Seja r a reta perpendicular a um plano ,
seja ’ um plano paralelo a . ConsidereA
mos A o traço de r no plano e A’ a intersecção de r com plano ’ que existe pelo
A’
Teorema 11.8. Consideremos s’ uma reta
’
em ’ que passa por A’. Pelo Teorema 11.7
existe s em , passando por A paralela a s’. Pela Proposição 12.2, temos
que r e s são perpendiculares. As retas r, s e s’ são coplanares logo,
pelo Teorema 5.4, r e s’ são perpendiculares e como s’ é qualquer reta
que passa por A’ temos da Proposição 12.2 que ’ é perpendicular a r.
Proposição 12.4: a) Duas retas distintas r e r’ perpendiculares a um
mesmo plano, são paralelas.
b) Dois planos distintos e ’ perpendiculares a uma mesma reta são
paralelos.
Demonstração: a) Sejam r e r’ duas retas
perpendiculares a um plano e suponhamos por absurdo que r e r’ não sejam paralelas. Traçamos por A, traço de r’ com ,
uma reta s paralela a r (ver desenho ao
lado). Como r’ não é paralela a r, temos que
s e r’ são duas retas distintas passando pelo
ponto A, assim determinam um plano ’ =
pl (r’,s),
que intercepta o plano segundo uma reta t.Como r e s são paralelas
e r é perpendicular a , temos, pela Proposição 12.3, que s é
perpendicular a . Assim, pela Proposição 12.2, temos em ’, r’ e s
perpendiculares a t em A, o que é absurdo. Logo, r e r’ são paralelas.
216
12. Perpendicularismo de Retas e Planos
b) Sejam e ’ planos perpendiculares a uma mesma reta r.
Suponhamos, por absurdo, que e ’ não sejam paralelos. Então eles
se interceptam segundo uma reta t. Seja A o traço de r sobre e A’ o
traço de r sobre ’. Consideremos um ponto B t e tracemos o
triân-gulo AA’B. Como A e A’ são traços então temos m(Â) = m(Â’) =
90o, o que é absurdo pois, pelo Teorema 4.13, a soma de dois ângulos
de um triângulo é sempre menor do que 180o. Logo, e ’ são
paralelos.
Ao definirmos retas perpendiculares a plano, surge a seguinte
pergunta: o conjunto dessas retas não é vazio? Ou seja, será que dado
um plano qualquer sempre existe pelo menos uma reta perpendicular
a ele? De acordo com a Proposição 12.3, se houver uma, haverá
infinitas, pois toda reta paralela a essa perpendicular ao plano,
também será perpendicular ao plano. Nossa intuição diz que dado
qualquer plano sempre existe uma reta perpendicular a ele, mas
vamos ser bem preciso demonstrando sua existência construindo-a. O
próximo teorema será fundamental para tal construção.
Teorema 12.5: Se uma reta r é ortogonal a um par de retas concorrentes de um plano , então r é perpendicular a .
Demonstração: Sejam s’ e t’ um par de retas concorrentes e ortogonais a r em .
Seja A o ponto de interseção de r com .
Traça-mos por A, retas s e t, paralelas a s’ e
t’, respectivamente. Por definição de retas
or-togonais, s e t são perpendiculares a r.
De-vemos mostrar que toda reta u,
passando por A é perpendicular a r. Se u
coincide com s ou
t,então temos o desejado. Vamos supor então que u seja distinta de s
e t. Tomemos em uma reta v, de tal modo que a interseção U de v e
u esteja entre a interseção T de v com t e a interseção S de v com s
(isto é possível pois sendo s e t retas distintas temos Ss e Tt
distintos de A. Considere U no segmento ST e a reta u que passa pelos
217
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
pontos A e U). Em cada semi-espaço determinado por ,
consideremos pontos em r, A1 e A2 em semi-retas opostas em relação
a A de tal modo que
AA1 AA2. Os triângulos retângulos A1TA e
A2TA são congruentes (pois AA1 AA2, AT é comum aos dois triângulos
e como t é perpendicular a r, temos m(A1ÂT) = m(A2ÂT) = 90o. Assim
pelo caso LAL temos o desejado) e assim A1T A2T. Analogamente
temos que A1S A2S. Logo os triângulos A1ST e A2ST são congruentes
pelo caso LLL. Segue que os triângulos A1SU e A2SU são congruentes
pelo caso LAL. Assim A1U A2U, e novamente pelo caso LLL temos
que os triângulos A1AU e A2AU são congruentes, donde segue que
A1ÂU A2ÂU. Como A, A1 e A2 são colineares temos que esses ângulos
são retos, como queríamos demonstrar.
Vamos agora construir retas e planos perpendiculares.
Teorema 12.6: a) Por um ponto P dado, se pode traçar um único plano
perpendicular a uma reta r dada.
b) Por um ponto P dado, se pode traçar uma única reta r
perpendicular a um plano dado.
r
P
Demonstração: a) (Existência) Traçamos
dois planos distintos 1 e 2 passando por r
(porque existem?). Seja B um ponto qual-
quer de r e consideremos duas retas s e t
perpendiculares a r por B nos planos 1 e
B
t
2 respectivamente. O plano pl(s,t) contém
s
pl(s,t)
as duas retas s e t concorrentes em B,
perpendiculares a r, logo pelo Teorema 12.5 este plano é perpendicular a r.
Utilizamos agora o Teorema 11.5 para traçar um plano paralelo a
pl(s,t) passando pelo ponto P. A Proposição 12.3 garante que r é
perpendicular a .
(Unicidade) Seja ’ outro plano perpendicular a r, passando por P.
Pela Proposição 12.4, e ’ são paralelos, o que é um absurdo.
218
12. Perpendicularismo de Retas e Planos
b) (Existência) Consideremos em , duas
r’
retas s e t concorrentes em um ponto A e
P
traçamos dois planos distintos 1 e 2
perpendiculares a estas retas por A
(possível pelo item a)). Seja r’ a reta
interseção de 1 e 2. Por definição e
r
construção temos que r’ é perpendicular a
A
t
s e a t (s está em e é perpendicular a 1, e s
t está em e é perpenperpendicular a 2). Assim, pelo Teorema 12.5, r’ é perpendicular a .
Consideremos agora uma reta r paralela a r’, passando por P. Pela
Proposição 12.3, temos que r é perpendicular a .
(Unicidade): Se existisse outra reta perpendicular a passando por P,
esta reta seria paralela a r’. O Teorema 10.7 garante que r é a única
reta paralela a r’, passando por P.
Exemplos
V
12.2. Uma pirâmide tal que sua base é um
polígono regular e o seu vértice se situa
sobre a perpendicular traçada pelo centro
da base é dita uma pirâmide regular. Se a
base de uma pirâmide é triangular e possui
as seis arestas congruentes, então ela é
chamada tetraedro regular.
D
C
D
A
C
B A
B
12.3. Um cone tal que seu vértice se situa sobre a perpendicular
traçada pelo centro da base é dito um cone reto ou cone de
revolução.
12.4. Podemos fazer uma classificação dos prismas de acordo com o
comportamento das bases e das arestas laterais. Quando as arestas
laterais de um prisma são perpendiculares as bases o denominaremos
prisma reto, caso contrário, será chamado prisma oblíquo (desenhos
219
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
abaixo). Se o prisma for reto e as bases forem polígonos regulares, o
denominaremos prisma regular. (desenhos abaixo).
Prismas Retos
Prismas Oblíquos
Prismas Regulares
Um paralelepípedo é um prisma cujas
bases são paralelogramos. Quando o
prisma
é
reto
o
denominamos
paralelepípedo reto. Se o paralelepípedo
reto
tiver
bases
retangulares
o
chamaremos paralelepípedo reto-retângulo ou paralelepípedo retângulo (ou ainda
ortoedro) . Se as arestas de um paralelepípedo forem congruentes ele será chamado
de romboedro. Um romboedro que é um
paralelepípedo reto é chamado de
romboedro reto, caso contrário, será
chamado romboedro oblíquo. Quando o
romboedro
for
um
paralelepípedo
retângulo o denominaremos cubo.
220
12. Perpendicularismo de Retas e Planos
Apresentamos no diagrama ao lado as subclasses da classe dos
prismas:
romboedros
cubos
paralelepípedos
Prismas
regulares
retos
prismas
oblíquos
12.5. Um cilindro reto é um cilindro cuja
reta geratriz é perpendicular aos planos
das bases.
geratriz
E
12.6. Considere três segmentos de reta AB,
CD e EF, congruentes, mutuamente
perpendiculares, que se cortam no ponto
C
B
médio O de cada um deles conforme
O
desenho ao lado. Unimos os extremos A
D
destes segmentos entre si (por exemplo, A
com B, C, D, E e F). O octaedro regular é a
interseção dos semi-espaços determinados
F
pelos planos ACE, ADE, DBE, BCE, ADF, ACF, BDF e BCF contendo o
ponto O juntamente com estas regiões triangulares. O termo regular
segue do fato que os segmentos EA, EB, EC, ED, FA, FB, FC e FD são
todos congruentes. Deixamos como exercício a demonstração desta
propriedade.
221
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
O tetraedro regular, o cubo e o octaedro regular são exemplos
de poliedros regulares, que serão estudados e classificados no
Capítulo 15.
12.2. Perpendicularismo entre Planos
Para finalizar o capítulo, vamos definir perpendicularismo
entre planos e verificar em que condições dois planos são
perpendiculares entre si.
Definição 12.7: Tomemos dois planos secantes e . Considere um plano perpendicular a r= . Sejam s = e t = . O
ângulo entre s e t independe da escolha de
, pela Proposição 12.3, pelo Teorema 11.9
e pelo Teorema 10.10, e é denominado
ângulo entre os planos e . Quando s e t
formam um ângulo reto, dizemos que os
planos e são perpendiculares
Observe que se e são perpendiculares, então a reta s de
é perpendicular às retas r e t de . Logo, s é uma reta de que é
perpendicular a , pelo Teorema 12.5. O teorema seguinte garante
que ter uma reta nestas condições é uma condição necessária e
suficiente para que os planos sejam perpendiculares.
Teorema 12.8: Dois planos e são perpendiculares se, e somente
se, um deles contém uma reta perpendicular ao outro.
Demonstração: A primeira parte foi feita acima. Reciprocamente, su-
222
12. Perpendicularismo de Retas e Planos
ponhamos que uma reta r de seja
perpendicular a . O plano corta o plano
segundo uma reta t, que é ortogonal a r,
pela definição de reta perpendicular a
plano. Como t está em também, r e t são
perpendiculares entre si. Pelo ponto de
interseção de r e t, traçamos uma reta s,
contida em e perpendicular a t. O plano
= pl (r,s) é perpendicular a t, pelo Teorema 12.5, pois contém duas
retas concorrentes perpendiculares a t. Assim temos = r e = s,
mas r e s são perpendiculares entre si, de novo pela definição de reta
perpendicular a plano já que, por hipótese, r é perpendicular a e
assim ortogonal a todas as retas de . Portanto e são de fato
perpendiculares, por definição.
Exemplos
12.7. No prisma reto temos que os planos das faces laterais são
perpendiculares aos planos das bases.
12.8. No octaedro os planos CDE e ABE são perpendiculares ao plano
ABC.
Como sabemos traçar uma reta r perpendicular a um plano,
utilizando o Teorema 12.8 é fácil construir planos perpendiculares a
plano. Basta construir um plano qualquer contendo r. Sabendo da
existência de planos perpendiculares, vamos estabelecer mais alguns
resultados.
Teorema 12.9: Se um plano é perpendicular a um plano e uma reta
r de é perpendicular à reta de interseção de e , então r é
perpendicular a .
223
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Demonstração: Suponhamos que a reta r
de seja perpendicular a reta t que é a
interseção de e . Pelo ponto de interseção de r e t, traçamos uma reta s, contida
em e perpendicular a t. Como e são
perpendiculares por hipótese, r e s são
perpendiculares, por definição de planos
perpendiculares. Assim, r é perpendicular
a um par de retas concorrentes s e t de , e então, pelo Teorema 12.5,
é perpendicular a .
Corolário 12.10: Se uma reta r e um plano são ambos
perpendiculares a um mesmo plano , então r é paralela a ou está
contida em .
Demonstração: Existem apenas três posições relativas entre uma
reta r e um plano , r , r // ou r = P. Seja s a reta interseção
entre os planos e e r = Q e vamos supor que r seja secante a
em um ponto P. Tracemos agora por P uma reta s’ s, onde s s’= P’
considere o plano ’ determinado por s’ e r. Em ’ temos o triângulo
PP’Q com dois ângulos retos, o que é absurdo, logo r não pode ser
secante a . Portanto, ou r ou r // , como queríamos
demonstrar.
Teorema 12.11: Por uma reta r não perpendicular a um plano existe
um único plano perpendicular ao plano .
Demonstração: (Existência) Seja A um
ponto qualquer de r. Tracemos por A uma
reta s perpendicular a (possível pelo
Teorema 12.6). Como r não é perpendicular
a , temos que s e r são concorrentes em
A, e portanto determinam um plano . Mas
s está em e é perpendicular a , logo pelo
Teorema 12.8, e são perpendiculares.
224
12. Perpendicularismo de Retas e Planos
(Unicidade) Se ’ é um plano que contém r e é perpendicular a , ele
deve conter s, pois pelo Corolário 12.10, s deve ser paralelo ou estar
contido em ’, mas como A está em s, temos que s está em ’. Assim r
e s estão em ’, logo ele deve coincidir com , pela Proposição 10.5.
Terminamos este capítulo apresentando um diagrama geral
dos principais sólidos geométricos até agora estudados:
Prismas oblíquos
Octraedros
Troncos de
pirâmides
romboedros
cubos
Prisma
regular
os
ped
í
p
le
ale
par
Prismas retos
Cones
circulares
sólidos
tetraedros
pirâmides
Sólidos que não rolam
Cilindros
Tronco de
Cones
circulares
Sólidos que rolam
12.3. Exercícios
12.1. Dado um tetraedro regular, mostre que:
a) duas retas perpendiculares as bases, passando por dois de seus
vértices são coplanares.
b) as quatro retas perpendiculares as bases, passando pelos vértices
se encontram num único ponto, que é eqüidistante dos quatro
vértices.
225
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
12.2. Mostre que por um ponto dado se pode traçar uma única reta
ortogonal a duas retas distintas não paralelas.
12.3. Demonstre o seguinte resultado, denominado Teorema das três
perpendiculares: Sejam A, B e C pontos não colineares. Se as retas AB,
AC são ortogonais a uma reta r, então BC também é ortogonal a r.
12.4. Dois triângulos ABC e BCD são retângulos em B. Mostre que se o
cateto AB é ortogonal à hipotenusa CD então o cateto BD é ortogonal
à hipotenusa AC.
12.5. Seja r uma reta do espaço e P um ponto exterior a r. Qual é o
lugar geométrico dos traços das perpendiculares por P aos planos que
contém r?
12.6. Mostre que os centros das faces de um cubo são vértices de um
octaedro regular e que os centros das faces de um octraedro regular
são vértices de um cubo.
12.7. Mostre que os centros das faces de um tetraedro regular são
vétices de um outro tetraedro regular. Qual é a razão entre as arestas
dos dois tetraedros?
12.8. Mostre que se duas retas são reversas e ortogonais, então existe
um único plano por uma, perpendicular à outra.
12.9. Se os segmentos AB e CD são ortogonais, então vale a equação:
(AC)2 (AD)2 (BC)2 (BD)2 .
12.10. Mostre que uma reta e um plano perpendiculares a uma
segunda reta em pontos distintos são paralelos.
12.11. Dados um ponto, uma reta e um plano, traçar pelo ponto uma
reta paralela ao plano e ortogonal ou perpendicular à reta dada.
12.12. Um plano, uma reta e um ponto são dados. Conduzir pelo ponto,
um plano paralelo à reta e perpendicular ao plano dado.
226
12. Perpendicularismo de Retas e Planos
H
12.13. Dado um cubo ABCDEFGH,
consideremos o plano diagonal pl(BD,FH).
Mostre que a diagonal AC da face ABCD é
perpendicular a este plano.
G
F
E
D
A
C
B
12.14. Com o mesmo desenho do Exercício 12.13, mostre que o único
plano que contém a diagonal BH e é perpendicular ao plano da face
ABCD é o plano diagonal pl (BD,FH).
12.15. Mostre que dois planos são perpendiculares se, e somente se,
duas retas perpendiculares a cada um deles são ortogonais.
12.16. Mostre que se um plano contém uma reta perpendicular a um
plano , então o plano contém uma reta perpendicular ao plano .
12.17. Mostre que um plano é perpendicular a dois planos secantes se,
e somente se, ele é perpendicular à reta de interseção dos dois
planos.
12.18. Em um cubo como do Exercício 12.13, mostre que os planos
diagonais pl (AC,EG) e pl (BD,FH) são perpendiculares.
12.19. Classifique as afirmações abaixo em verdadeiras ou falsas,
justificando brevemente sua resposta :
a) Dois planos distintos perpendiculares a um terceiro são paralelos
entre si.
b) Se uma reta e um plano são perpendiculares, então todo plano
que contém a reta é perpendicular ao plano dado.
c) Uma reta e um plano, perpendiculares a um segundo plano, são
paralelos.
d) Uma condição necessária e suficiente para que dois planos
secantes seja perpendiculares, é que toda reta de um deles,
perpendicular a interseção, seja perpendicular ao outro.
e) Se um plano é perpendicular a outro, então ele é perpendicular a
qualquer reta desse outro.
227
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
f) Se dois planos são perpendiculares então toda reta de um forma
ângulo reto com qualquer reta do outro.
g) Por uma reta passa um plano perpendicular a um plano dado.
h) Se dois planos são paralelos, todo plano perpendicular a um é
perpendicular ao outro.
12.20. Construir por um ponto dado, um plano perpendicular a dois
planos dados.
228
Capítulo 13: Projeções,
Diedros e Triedros
Distâncias,
Ângulos,
Nesse capítulo, utilizaremos os conceitos e resultados vistos
nos capítulos anteriores para definir distâncias entre ponto e plano,
entre reta e plano paralelo, entre planos paralelos e entre retas
reversas. Veremos ainda como medir ângulos entre reta e plano e
ângulos entre planos e trabalharemos com diedros e triedros.
13.1. Distância de Ponto a Plano
Para definir distância de ponto a plano precisamos do conceito
de projeção ortogonal sobre um plano.
Definição 13.1: Chama-se projeção ortogonal de um ponto P sobre um
plano ao traço P’ da perpendicular ao plano por P. Chama-se projeção
ortogonal de uma figura F sobre um plano, ao conjunto F’ das
projeções ortogonais dos pontos da figura sobre o plano
O Teorema 12.6.b garante a existência de P’.
Proposição 13.2: Sejam r uma reta e um plano.
a) Se r é perpendicular a , sua projeção ortogonal sobre é o traço
P de r em .
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
b) Se r não é perpendicular a , a projeção ortogonal de r sobre é a
reta r’, interseção de com , onde é o plano perpendicular a
que passa por r.
Demonstração: a) Seja X um ponto qualquer de r. Suponhamos, por
absurdo, que a projeção ortogonal de X sobre não seja o traço P, ou
seja, a projeção ortogonal de X sobre seja um ponto Q P. Logo,
temos que as retas r e XQ contém X e são perpendiculares a , o que
contradiz o Teorema 12.6. Como X é qualquer então a projeção de r
sobre é o traço P de r em .
b) Se r e não são perpendiculares,
X
trace-mos por r o plano perpendicular a
, dado pelo Teorema 12.11. Seja r’ a
interse-ção . Para cada X r, seja x
.
a reta que passa por X e é perpendicular a
X’
. Afirmamos que x . De fato, como x
r’
é perpendicular a e é perpendicular a
r
, pelo Corolário 12.10, x // ou x .
Mas X x e X r , então x . Por definição, a projeção ortogonal X’ do ponto X é o traço de x em . Como x e X’ , temos
que X’ = r’. Pelo fato de termos tomado X arbitrário em r,
temos que a projeção de r é a reta r’.
Já vimos na G.P. que a distância entre dois pontos A e B é, por
definição, o comprimento do segmento AB. Como a unicidade da reta
AB é garantida também no espaço, a distância entre dois pontos no
espaço também é o comprimento do segmento AB. A distância entre
um ponto e uma reta no espaço também pode ser obtida como em
G.P., pois uma reta r e um ponto P determinam um único plano =
pl(r,P), de acordo com a Proposição 10.3 e assim a distância de P a r é
o tamanho do segmento PP’, onde P’ é o pé da perpendicular a r por P
em .
Antes de definirmos novas distâncias vamos aplicar esses
conhecimentos no seguinte exemplo:
230
13. Projeções, Distâncias, Ângulos, Diedros e Triedros
Exemplo:
13.1. Dado um paralelepípedo retângulo
ABCDEFGH de lados AB=a, AD=b e AE=c a
distância entre o ponto H e a reta BD é c
(por que?). Como o triângulo ABD é
retângulo temos, pelo Teorema de Pitágo-
H
E
G
F
D
C
ras, BD = a 2 b 2 , assim, a distância entre
A
B
B e D é por definição a 2 b 2 . Mas o triângulo BDH é retângulo em D (porque ?) e assim novamente por
Pitágoras a distância entre B e H é a 2 b 2 c 2 .
Conhecido então a distância entre dois pontos e sua medida,
podemos perguntar qual é o lugar geométrico dos pontos que
eqüidistam de dois pontos A e B dados?
Em G.P., vimos que a resposta no plano é a mediatriz do
segmento AB. No espaço ocorre algo semelhante. Considere o plano
perpendicular a reta AB pelo ponto médio M do segmento AB ( que
é
A
único pelo Teorema 12.6.a). Dado um ponto
P em , temos que a reta PM é perpendicular a reta AB em M (pela definição de reta
perpendicular a plano). Pelo caso LAL,
.M
temos que PMA PMB e assim PA PB.
.
Por outro lado se P é um ponto no espaço
P
tal que PA PB, então PAB é isósceles e
B
assim PM é perpendicular a AB. Logo, P está
em .
Definição 13.3: O plano descrito acima é chamado plano mediador.
Agora podemos mostrar a seguinte proposição:
Proposição 13.4: As arestas opostas de um tetraedro regular são
ortogonais.
231
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Demonstração: Primeiramente afirmamos que para quaisquer
pontos A, B, C e D distintos no espaço satisfazendo AB = AD e CB =
CD , então AC e BD são ortogonais. De fato, sob essas condições A e C
estão no plano mediador de BD. Então AC está contida num plano
perpendicular a BD e assim, por definição, de perpendicularismo entre
reta e plano, AC e BD são ortogonais. Portanto, como o tetraedro
regular satisfaz essas condições, temos o desejado.
Vamos agora definir distância entre ponto e plano.
Definição 13.5: A distância de um ponto P a um plano é a medida do
segmento PP’, onde P’ é a projeção ortogonal de P sobre .
O próximo resultado garante que a distância de P a é a
menor distância entre P e os pontos de , ou seja, esta definição está
de acordo com o que se espera de uma distância entre ponto e plano.
Proposição 13.6: Se Q é um ponto qualquer do plano e P então
PQ ≥ PP ’, a igualdade ocorre apenas se P’ = Q.
Demonstração: Se P’ Q, então PP’Q é um
triângulo retângulo em P’, logo PQ é
hipote-nusa e PP’ é cateto, assim PQ > PP ' .
232
13. Projeções, Distâncias, Ângulos, Diedros e Triedros
Exemplos
13.2. Considere uma pirâmide de vértice V.
Seja V’ a projeção ortogonal de V sobre
plano da base, a altura da pirâmide é o
segmento de extremidades V e V’.
V
D
A
13.3. Da mesma maneira definimos altura
de um cone. Considere um cone de vértice
V e base B. Seja V’ a projeção ortogonal de
V sobre a base B, a altura do cone é o
segmento de extremidades V e V’.
V’
C
B
V
V’
Proposição 13.7: Se uma reta r é paralela a um plano , então todos os
pontos de r são equidistantes de .
Demonstração: Sejam P, Q r, por P e Q
traçamos perpendiculares a obtendo P’ e
Q’ como traços. Temos:
- PP’ paralelo a QQ’, logo PP’QQ’ estão
num mesmo plano.
- Como r é paralela a , a reta PQ não
intercepta a reta P’Q’ e assim são
paralelas.
- PP’ e QQ’ são perpendiculares a P’Q’, por definição de
perpendicula-rismo entre reta e plano.
Assim PQQ’P’ é um retângulo e portanto PP’ QQ’.
Proposição 13.8: Se dois planos são paralelos, todos os pontos de um
são equidistantes do outro.
233
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Demonstração: Sejam e dois planos paralelos, X e Y pontos
quaisquer de e r a reta que passa por X e Y. Pelo Exercício 11.9
temos que r é paralela a . Logo, pela Proposição 13.7 todos os pontos
de r são eqüidistantes de , em particular, X e Y. Como os pontos X e Y
foram tomados arbitrariamente em , temos que todos os pontos de
são eqüidistantes de . Analogamente, todos os pontos de são
equidistantes de .
Exemplo
13.4. Considere um prisma e uma reta r
perpendicular aos planos das bases do prisma. Sejam A e B os pontos de intersecção
de r com os planos da base. Uma altura do
prisma é o segmento AB. Pela Proposição
13.8, temos que todas as alturas do prisma
terão a mesma medida.
13.5. Da mesma maneira definimos altura
de um cilindro: Dado um cilindro e r uma
reta perpendicular aos planos das bases do
cilin-dro, sejam A e B os pontos de
interseção de r com os planos das bases.
Uma altura do cilindro é o segmento AB.
Pela Proposição 13.8, temos que todas as
alturas do cilindro terão a mesma medida.
234
A
B
13. Projeções, Distâncias, Ângulos, Diedros e Triedros
A
13.6. Seja ABCD um tetraedro regular de
aresta a. Vamos calcular a distância do
verti-ce A ao plano BCD, ou seja, a altura do
te-traedro. Seja A’ a projeção ortogonal de
A sobre o plano BCD. Como os triângulos
D
AA’B, AA’C e AA’D são congruentes, pois
A’
H
são triân-gulos retângulos que possuem
C
hipotenusas AB, AC e AD congruentes e o B
lado AA’ comum, temos que A’B, A’C e A’D são congruentes e assim A’ é o
circuncentro do triângulo equilátero BCD (conforme citado na
Introdução). Consideremos o triângulo retângulo AA’B. Conhecemos
a 3
, pois é raio da circunferência circunscrita num
AB=a e A' B =
3
triângulo equilátero. Assim, utilizando o Teorema de Pitágoras,
obtemos que AA’ =
a2
3a2
=
9
9a2 3a2
=
9
6a2
a 6
=
.
9
3
O teorema a seguir foi proposto no Exercício 12.3, mas devido
a sua utilidade vamos reenunciá-lo a seguir:
Teorema 13.9 (das três perpendiculares ): Se três pontos não colineares A, B e C são tais que as retas AB e AC são ambas ortogonais a uma
certa reta r, então a reta BC também é ortogonal a r.
Corolário 13.10: Sejam um plano e P .
Traçamos por P a perpendicular a , cujo
traço é P’. Considere um ponto Q , com
Q P’. Traçamos por Q uma reta r
perpendicular a P’Q. Então r é
perpendicular a PQ.
Demonstração: Como PP’ é perpendicular
a , temos pelo Teorema 12.8 que o plano
235
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
determinado pelos pontos P, P’ e Q é perpendicular a . Como P’ e Q
pertencem a e a temos pela Proposição 10.1 que = rP’Q.
Como r está contida em e é perpendicular a P’Q, temos que r é perpendicular a (Teorema 12.9). Temos PP’ perpendicular a e r ,
então PP’ é ortogonal a r e r, por hipótese, é perpendicular a rP’Q.
Assim, pelo Teorema 13.9, temos que r e PQ são perpendiculares em
Q.
13.2. Distância entre Retas Reversas
Com o objetivo de obter a distância entre duas retas reversas
vamos demonstrar a seguinte proposição:
Proposição 13.11: Se duas retas r e s são reversas, então existe uma
única perpendicular comum a essas retas.
Demonstração: (Existência) Pelo Exercício 11.5 existe um plano
contendo r e paralelo a s. Pelo Teorema 12.11 existe um único plano
perpendicular a passando por s. Seja
x
s
t = , como s é paralela a , temos
.
que s é paralela a t e , além disso, r e t são
t
B
concorrentes, digamos num ponto A. Por A
traçamos a reta x perpendicular a t no
.
A r
plano . Como s é paralela a t e x é
perpendicular a t temos que x é
perpendicular a s. Além
disso, é perpendicular a e t é a interseção de e , logo, pelo
Teorema 12.9, x é perpendicular a . Como r passa pelo traço de x em
, temos pela Proposição 12.2 que x é perpendicular a r.
236
13. Projeções, Distâncias, Ângulos, Diedros e Triedros
(Unicidade) Sejam B = x s e uma reta x’
x tal que x’ é perpendicular a r e a s em C e
D, respectivamente. Temos então x’
ortogonal a t e, pelo Teorema 12.5, x’ é
perpendicular
a
.
Vimos,
na
demonstração de existência, que x é
perpendicular a . Assim, pela Proposição
12.4, x // x’ ou x = x’. Se x // x’ consideramos
o plano pl(x,x’), logo temos que
A, B, C, D pl(x,x’). Assim as retas r e s pertencem ao plano pl(x,x’), o
que é aburdo pois r e s são reversas, logo x = x’.
Teorema 13.12: Se duas retas r e s são reversas, então de todos os
segmentos que tem uma extremidade em cada uma das retas, o
menor é aquele que está contido na perpendicular comum.
Demonstração: Sejam A e B como na Proposição 13.11, A’ em s e B’
em r. Dividiremos em dois casos:
1o Caso: A = A’ ou B = B’, então A’B’ é hipotenusa e AB cateto, logo
A' B' > AB.
2o Caso: A A’ e B B’: Traçamos B’C
perpendicular a t em . Pelo Teorema 12.9,
B’C é perpendicular a . Assim, B’C é
perpen-dicular a A’C e o triângulo A’B’C é
retângulo em C, logo A' B' > B' C . Mas B’C
AB pois r e t são paralelas, portanto
A' B' > AB.
Agora podemos definir distância entre retas reversas:
237
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
A
Definição 13.13: Chama-se distância entre
duas retas reversas a medida do segmento
contido na perpendicular comum, com uma
extremidade em cada uma das retas.
r
d
s
B
Exemplo
H
13.7. Considere o paralelepípedo ilustra-do E
no desenho ao lado. A distância entre as
retas reversas AD e BF, por definição, é
exatamente a medida da aresta AB.
A
G
F
D
C
B
13.3. Ângulo entre Planos e entre Reta e Plano
Vamos agora introduzir os conceitos de ângulos entre plano e
plano e entre reta e plano. Quando definimos perpendicularismo
entre planos, introduzimos uma forma de se definir o ângulo entre dois
planos secantes e . Vejamos como medir este ângulo e, para isto,
considere um plano perpendicular a reta r = . Sejam as retas s
= e t = , como na Definição 12.7.
Definição 13.14: Se dois planos e são
paralelos ou coincidentes, a medida do
ângulo entre eles é igual a zero. Se e
são secantes, a medida do ângulo entre
e é a medida do ângulo entre as retas s e
t.
238
13. Projeções, Distâncias, Ângulos, Diedros e Triedros
Assim temos que a medida do ângulo entre dois planos varia
entre 0 e 900.
o
Proposição 13.15: O ângulo formado por dois planos é igual ao ângulo
formado por duas retas respectivamente perpendiculares a estes
planos.
Demonstração: Sejam t e s como na Definição 13.14. No desenho a
seguir, os planos e são perpendiculares à página deste livro,
passando por s e t, respectivamente. Seja A um ponto de não
pertencente a t nem a s. Traçamos por A perpendiculares v e u a t e s,
respectivamente, ambas no plano da página.
t
v
u
B
s
C
s
A
D
u
A
B
C
D
t
v
Observe que nos dois casos possíveis os ângulos BÂD e BĈD são
ângulos suplementares e assim, por definição de ângulos entre retas,
temos o desejado.
Queremos agora, para concluir este capítulo, definir ângulo
entre reta e plano. Obviamente, queremos que este ângulo seja 90o
quando a reta é perpendicular ao plano e 0o quando a reta estiver
contida no plano. Para apresentar a definição vamos precisar do
seguinte resultado:
Proposição 13.16: Se uma reta r não é perpendicular a um plano e o
intercepta em um ponto A, então o ângulo agudo de r com sua
projeção ortogonal r’ sobre é menor que o ângulo agudo de r com
qualquer reta de que passa por A.
239
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Demonstração: Por um ponto P qualquer
de r construimos PP’ perpendicular a , e
por definição P’ r’. Seja s uma reta
qualquer em que passa por A. Em s
tomamos um ponto Q tal que AP’ AQ. Nos
triângulos APP’ e APQ temos o seguinte, AP é
comum, AP’ AQ, por construção, e PP' < PQ,
pela Proposição 13.6. Segue da recíproca proposta no Exercício 4.19 que
PÂP’ < PÂQ.
Definição 13.17: O ângulo entre uma reta r e um plano é igual ao
menor ângulo formado por r e uma reta qualquer do plano .
Pela proposição anterior o ângulo entre a reta r oblíqua a , é
o ângulo agudo que a reta forma com sua projeção ortogonal sobre o
plano. Obviamente, se r é perpendicular a , o ângulo entre r e
qualquer reta de é sempre 90o, assim o ângulo entre r e será 90o
como desejado. Se r estiver contida no plano , o menor ângulo será
o ângulo formado entre r e sua projeção, que é r, assim 0º.
Exemplos
13.8. As arestas laterais de um prisma qualquer formam ângulos
congruentes com o plano da base.
240
13. Projeções, Distâncias, Ângulos, Diedros e Triedros
V
13.9. As arestas laterais de uma pirâmide
regular formam ângulos congruentes com
o plano da base.
D
C
B
A
13.10. As geratrizes de um cilindro formam ângulos congruentes com o
plano da base.
13.4. Diedros
No próximo capítulo definiremos os poliedros convexos. Para
isto necessitaremos de alguns conceitos importantes, que daremos
nesta seção.
Definição 13.18: Dados uma reta r e os
pontos A e B não pertencentes a r, um
diedro, denotado por di(r,A,B), é a figura
formada pelos dois semiplanos r,A e r,B de
origem comum r. A reta r é denominada
aresta do diedro. Os semiplanos r,A e r,B
são denominados faces do diedro (veja
desenho ao lado). Uma seção de um diedro
é a interseção do diedro com um plano
241
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
secante à aresta, ou seja, se o plano
secante intercepta r em O, uma seção de
um diedro é o ângulo no plano secante
com vértice O. Assim, se C r,A e D r,B
são pontos do ângulo formado pelas semiretas SOC e SOD denotaremos a seção como
a notação de ângulo, neste caso, por CÔD.
Quando o plano secante é perpendicular à
aresta, dizemos que a seção é normal ou
reta.
C
O
D
Exemplos
13.11. Uma pirâmide possui 2n diedros, onde n é o número de lados do
polígono da base. De fato, n deles são formados pelas arestas da base,
os outros n com as arestas laterais.
13.12. Os cones e os cilindros não apresentam diedros, ou seja, não há
interseção entre planos.
Vejamos agora algumas relações entre as seções de um
diedro:
Proposição 13.19: Dado um diedro qualquer temos que:
a) Duas seções paralelas são congruentes.
b) Seções normais são congruentes.
Demonstração: a) Segue imediatamente do Teorema 10.10.
b) Sejam e dois planos distintos e perpendiculares a aresta de um
diedro. Como e são ambos perpendiculares a aresta, temos pela
Proposição 12.4 que e são paralelos. Logo, pelo item a) temos o
desejado.
Esta proposição permite definir congruência de diedros.
242
13. Projeções, Distâncias, Ângulos, Diedros e Triedros
Definição 13.20: Dois diedros di(r,A,B) e di(r’,A’,B’) são congruentes, e
escreveremos di(r,A,B) di(r’,A’,B’),
quando uma seção normal de um é
congruente a uma seção normal do outro.
O ângulo diedro é qualquer seção normal
do diedro. A medida do diedro é a medida
do ângulo diedro. Dizemos que o diedro é
reto se o ângulo diedro for reto; agudo se
o ângulo diedro for agudo e obtuso se o
ângulo diedro for obtuso.
Observações:
1) O ângulo diedro pode variar entre 0o e 180º.
2) O ângulo entre dois planos secantes é igual a medida do menor
diedro formado por eles.
Definição 13.21: Sejam di(r,A,B) e di(r’,A’,B’) dois diedros e consideremos, respectivamente, duas seções C D̂ E e C’ D̂ ’E’. Diremos que C D̂ E e
C’ D̂ ’E’ são igualmente inclinadas sobre as arestas r e r’, se os ângulos
formados pelos lados da seção C D̂ E com uma das semi-retas em r
com origem D, são respectivamente congruentes aos ângulos
formados pelos lados da seção C’ D̂ ’E’ com uma das semi-retas de r’
com origem D’.
A
D
B
E
C
r,A
r
r,B
A’
D’
E’
C’
r’,A’
B’
r’
r’,B’
As seções igualmentes inclinadas nos fornecem condições
para a congruência de diedros:
Teorema 13.22: Dois diedros são congruentes se, e somente se,
possuem seções igualmente inclinadas congruentes.
243
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Demonstração: Consideremos
dois
diedros congruentes di(r,A,B) e di(r’,A’,B’) e
duas seções igualmente inclinadas C D̂ E e
C’ D̂ ’E’. Sejam F e F’ pontos em r e r’,
respectiva-mente, tais que DF D'F' .
Temos dois casos a considerar:
D
A
C
B
F
G
r,A
E
H
r,
r
D’
B’
1O Caso: C D̂ F e E D̂ F, C’ D̂ ’F’ e E’ D̂ ’F’ são A’
ângulos agudos. Consideremos as seções
C’
F’
E’
normais G F̂ H e G’ F̂ ’H’. Assim, temos que
GDF G’D’F’ e HDF H’D’F’ pelo caso ALA, G’
H’
pois as seções são igualmente inclinadas
r’,A’
r’,B’
r’
por hipótese. Logo, temos GD G’D’, GF
G’F’, DH D’H’ e HF H’F’. Como por
hipótese
os diedros são congruentes, temos que os ângulos G F̂ H e G’ F̂' H’ são
congruentes. Portanto pelo caso LAL, temos que GFH G’F’H’. Dessa
congruência segue que GH G’H’ e assim pelo caso LLL temos a
congruência GDH G’D’H’, o que demonstra o teorema para esse
caso.
2o Caso: C D̂ F ou E D̂ F, C’ D̂ ’F’ ou E’ D̂ ’F’
são ângulos retos ou obtusos. Por F e
F’, tracemos semi-retas que encontram
os lados das seções em pontos M e N
no primeiro diedro e M’ e N’ no segundo diedro, de tal forma que os ângulos
DF̂M D' F̂' M' e DF̂N D'F̂'N' sejam
agu-dos. Assim, pelo caso ALA, por
constru-ção e hipótese, teremos as
congruên-cias FMD F’M’D’ e FND
F’N’D’. Assim, segue que FM F’M’; FN
F’N’, MD M’D’ e ND N’D’. Como
os diedros são congruentes temos,
pelo 1O Caso, que as seções N F̂ M e
244
B
A
D
M
C
r,A
F
r
N
E
r,
13. Projeções, Distâncias, Ângulos, Diedros e Triedros
N’ F̂ ’M’ igualmente inclinadas,por
construção, são congruentes, pelo
caso LAL. Assim,
B’
A’
D’
M’
C’
r’,A’
F’
r’
N’
E’
r’,B’
MN M’N’, donde pelo caso LLL, MDN M’D’N’. Portanto
MD̂N M'D̂'N' e as seções são congruentes.
Reciprocamente, suponhamos que duas seções igualmente inclinadas
de dois diedros são congruentes, devemos mostrar que os diedros são
congruentes.
1O Caso: Com as mesmas considerações do 1º. Caso da parte direta do
teorema obtemos as congruências GDF G’D’F’ e DHF D’H’F’, pois as
seções são igualmente inclinadas. Logo, GD G’D’, GF G’F’, DH
D’H’ e HF H’F’. Mas, por hipótese, as seções igualmente inclinadas
são congruentes, assim G D̂ H G’ D̂ ’H’. Logo, GDH G’D’H’, pelo caso
LAL. Assim, pelo caso LLL, GFH G’F’H’ e, portanto, as seções normais
G F̂ H e G’ F̂ ’H’ são congruentes, o que mostra a congruência dos
diedros para o 1O Caso.
2O Caso: Com as considerações do 2O Caso da parte direta do teorema,
obtemos as congruências FMD F’M’D’ e FND F’N’D’. Segue que os
triângulos MFN e M’F’N’ são congruentes, pois temos FMD F’M’D’
e FND F’N’D’ implica DMD’M’ e DND’N’ e como, por hipótese,
as seções igualmente inclinadas são congruentes, temos MD̂N
M'D̂'N e, assim, a congruência segue do caso LAL. Isto implica na
congruência MN M’N’ e, assim os triângulos MFN e M’F’N’ são
congruentes e portanto, como MF̂N M'F̂'N ’, agora estamos com
ângulos agudos como no 1O Caso da recíproca, logo os diedros são
congruentes.
245
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
13.5. Triedros
O conceito de triedro surge naturalmente ao considerarmos
três planos que tenham um ponto em comum. De fato, considere três
planos distintos dois a dois, teremos as seguintes situações:
- Os três planos são paralelos entre si;
- Dois planos são paralelos e o terceiro intercepta um deles;
- Os planos se interceptam dois a dois;
Este último caso é o que nos interessa, pois temos que dois
planos quando se interceptam eles possuem uma reta em comum, e
nos ajudará entender melhor ângulo das figuras geométricas
espaciais.
Definição 13.23: Sejam V um ponto, SVA, SVB,
SVC três semi-retas de mesma origem V não
coplanares. Chamamos de triedro ou
ângulo triedro e denotamos por V(A,B,C), a
interseção dos semi-espaços Epl(VAB),C,
Epl(VAC),B e Epl(VBC),A. Chamamos V de vértice
do triedro, as semi-retas SVA, SVB, SVC de
arestas do triedro e as regiões
VA,B VB,A, VA,C VC,A e VB,C
V
A
C
B
VC,B
são denominadas faces do triedro, e denotadas por F(AB), F(AC) e
F(BC).
Observações:
1. Observe que um triedro determina três diedros:
a) Determinado pelos semiplanos VA,B e VA,C, denotado por di(A).
b) Determinado pelos semiplanos VB,A e VB,C, denotado por di(B).
c) Determinado pelos semiplanos VC,A e VC,B, denotado por di(C).
2. Cada uma das faces de um triedro determina um ângulo. A face
F(AB) determina o ângulo A V̂ B, a face F(AC) determina o ângulo
A V̂ C e a face F(BC) determina o ângulo B V̂ C.
246
13. Projeções, Distâncias, Ângulos, Diedros e Triedros
Exemplos
13.13. Um dos triedros mais importante é o
que possui três diedros retos. Ele é denominado triedro tri-retângulo ou triedro triretangular.
V
13.14. Um tetraedro possui 4 triedros. que
são determinados pelos seus vértices. Os
triedros são A(V,B,C), B(V,A,C), C(V,B,A) e
V(A,B,C)
C
A
B
13.15. Uma pirâmide cuja base é um
polígono com n lados (n > 3) possui n
triedros que são determinados pelos
vértices da base. Em particular, na pirâmide
quadrangular ao lado temos os triedros
A(V,B,D), B(V,A,C), C(V,B,D) e D(V,A,C)
V
D
C
B
A
13.16. Um prisma cuja base é um n-ágono,
possui 2n triedros. Em particular, no prisma
hexagonal (veja desenho ao lado) temos 12
triedros, a saber: A(A’,B,F), B(B’,A,C),
C(C’,B,D), D(D’,C,E), E(E’,D,F), F(F’,A,E),
A,(A,B’,F’),
B’(B,A’,C’),
C’(C,B’,D’),
D’(D,C’,E’), E’(E,D’,F’) e F’(F,A’,E’).
F’
D’
C’
B’
F
E
A
D
B
247
E’
A’
C
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
13.17. Veja que os cones e os cilindros não apresentam triedros, ou
seja, não há interseção entre três planos.
Num triedro, um triângulo ABC com um vértice em cada aresta
é denominado seção. As seções nos triedros não são tão relevantes
quanto nos diedros. Para o estudo das propriedades do triedro
começaremos com as relações entre as faces:
Teorema 13.24: Em todo triedro, o ângulo de qualquer face possui
medida menor que a somas das medidas dos ângulos das outras duas.
Demonstração: Seja V(A,B,C) um triedro. Se os ângulos de todas as
faces são congruentes, o resultado é imediato. Se os ângulos de duas
faces são congruentes e maior que a medida do ângulo da terceira, o
resultado também é imediato. Suponhamos então que uma das faces
têm ângulo maior que as medidas dos ângulos das outras duas, por
exemplo, suponhamos que F(AC) é a face cujo ângulo tem a maior
medida. Devemos mostrar que m(AV̂C) m(AV̂B) m(BV̂C) . Considere
em
A V̂ C um ângulo D V̂ C tal que DV̂C BV̂C (1).
Tomando B’ em SVB e D’ em SVD tais que
VB' = VD' e considerando uma seção A’ B̂ ’C’
contendo o ponto D’, teremos:
a) D' C' B' C ’, pois os triângulos D’VC’ e
B’VC’ são congruentes, pelo caso LAL.
A
b) No triângulo A’B’C’, temos
V
C’
D’
A’
B’
C
D
B
A' C' < A' B' + B' C' A' D' + D' C' < A' B' + B' C' A'D' < A'B'
Desta relação segue do Exercício 4.19 que m(AV̂D) m(AV̂B) (2).
Utilizando (1) e (2), obtemos
m(AV̂D) m(DV̂C) m(AV̂B) m(BV̂C) m(AV̂C) m(AV̂B) m(BV̂C).
Como F(AC) é a face cujo ângulo possui a maior medida, temos o
resultado.
248
13. Projeções, Distâncias, Ângulos, Diedros e Triedros
O próximo resultado apresenta um limitante para a soma das
medidas dos ângulos das faces.
Teorema 13.25: A soma das medidas dos ângulos das faces de um
triedro qualquer é menor que 2 .
Demonstração: Seja V(A,B,C) um triedro,
devemos mostrar que
m(AV̂B) m(AV̂C) m(BV̂C) 2
Para isto, considere a semi-reta SVA’ oposta
a SVA (veja desenho ao lado).
Temos que V(A’,B,C) é um triedro e pelo
Teorema 13.24,
m(BV̂C) m(BV̂A' ) m(CV̂A' )
A’
V
A
C
B
(1)
Os ângulos AV̂B e BV̂A' são adjacentes e suplementares, o mesmo
ocorrendo com os ângulos AV̂C e CV̂A' . Logo, m(AV̂B) m(BV̂A' ) e
m(AV̂C) m(CV̂A' ) . Assim,
m(AV̂B) m(BV̂A' ) m(AV̂C) m(CV̂A' ) 2 .
Pela relação (1) temos
m(AV̂B) m(AV̂C) m(BV̂C) m(AV̂B) m(AV̂C) m(BV̂A' ) m(CV̂A' ) 2,
como queríamos demonstrar.
Definição 13.26: Um triedro V(A,B,C) é congruente a um triedro
W(D,E,F,) se existir uma correspondência biunívoca entre suas
arestas, tal que:
a) Os respectivos diedros são congruentes.
b) As respectivas faces têm ângulos congruentes.
249
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
V
W
.
.
B
E
F
C
A
D
Proposição 13.27: Dois triedros opostos pelo vértice (simétricos em
relação a um ponto) são congruentes.
Demonstração: Como os diedros opostos pela aresta são
congruentes (Exercício 13.14) e, além disso, os ângulos das faces dos
dois triedros são, respectivamente, ângulos opostos pelo vértice e,
portanto, congru-entes, temos, pela Definição 13.26, que os triedros
são congruentes.
Vamos agora definir triedros polares. A maioria das propriedades dos triedros são obtidas através deles.
Definição 13.28: Dizemos que um triedro V(A,B,C) é polar do triedro
V’(A’,B’,C’) quando:
a) V=V’.
b) VA, VB, VC são perpendiculares aos planos pl(V’,B’,C’), pl(V’,A’,C’)
e pl(V’,A’,B’), respectivamente.
c) Os ângulos AV̂A', BV̂B' e CV̂C' são agudos.
Pela unicidade da perpendicular a um plano por um ponto,
temos que o triedro tri-retângulo coincide com seu polar. Neste caso,
diremos que ele é autopolar.
Proposição 13.29: A propriedade de ser polar é simétrica, ou seja, se
V(A,B,C) é polar de V’(A’,B’,C’) então V’(A’,B’,C’) é polar de V(A,B,C).
Demonstração: Segue imediatamente do fato de ser simétrica a
relação de perpendicularidade, ou seja, r s s r.
250
13. Projeções, Distâncias, Ângulos, Diedros e Triedros
Apresentaremos a seguir a propriedade fundamental de
triedros polares:
Teorema 13.30: Se dois triedros são polares, o ângulo da face de cada
um é suplementar da seção reta do diedro oposto no polar.
Para demonstrar este teorema utilizaremos o seguinte lema:
Lema 13.31: Se por um ponto V da aresta r de um diedro di(,, r)
conduzirmos as semi-retas:
a) SVA, perpendicular a , onde A pertence ao semi-espaço que contém
.
b) SVB, perpendicular a , onde B pertence ao semi-espaço que contém
.
Então, o ângulo AV̂B é suplemento da seção normal do diedro di(,,
r).
Demonstração: Dividiremos em três casos:
i) O diedro é obtuso.
ii) O diedro é reto.
iii) O diedro é agudo.
Para o caso i), observemos que
VA VA r
.
VB
VB r
C
V
D
Logo, r é perpendicular ao plano =pl(VAB)
B
A
e então di(,, r) = CV̂D é a seção
normal do diedro di(,, r). Como, por
r
cons-trução, AV é perpendicular a e CV
está em
, temos que m(C V̂ A) = . Neste caso, por hipótese, m(C V̂ D) > ,
2
2
assim m(CV̂B) m(AV̂B) . Analogamente, m(D V̂ B) =
e assim
2
2
251
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
. Logo, m(CV̂B) m(AV̂B) m(AV̂B) m(AV̂D)
2
e, portanto, m(AV̂B) m(CV̂D) , como queríamos demonstrar. Para
o caso ii) temos SVA e SVB . Como e são
perpendiculares
temos que
m(AV̂B) m(CV̂D) .
2
Logo,
m(AV̂B) m(CV̂D) ,
como queríamos. Para o caso iii), como
VA e CV̂D é a seção normal e mede
menos que , temos que m(AV̂C) e
< 90o
2
2
B
da mesma forma m(BV̂D) . Assim,
2
V
C
m(AV̂C) m(BV̂D) =,
D
ou seja,
A
r
m(AV̂D) m(DV̂C) m(BV̂C) m(DV̂C) =.
m(AV̂B) m(AV̂D)
Logo, m(AV̂B) m(DV̂C) , como
queríamos demonstrar.
Demonstração: (do Teorema 13.30): Segue imediatamente da
definição de triedros polares e do Lema anterior, bastando observar
que o diedro oposto no triedro polar corresponde as semi-retas SVA e
SVB consideradas no Lema 13.31.
Corolário 13.32: a) Se dois triedros são congruentes entre si então
seus polares também são congruentes entre si.
b) Em qualquer triedro a medida de um diedro aumentada de rd
supera a soma dos outros dois.
252
13. Projeções, Distâncias, Ângulos, Diedros e Triedros
c) A soma das medidas dos diedros de um triedro está compreendida
entre rd e 3 rd.
Demonstração: a) Sejam V(A,B,C) e W(D,E,F) dois triedros congruentes, consideremos V(A’,B’,C’) e W(D’,E’,F’) seus respectivos polares.
Pelo item a) da Definição 13.26, di(A) di(D) e, utilizando o Teorema
13.30, temos
m(B' V̂C' ) m(di(A)) m(E' WF' ) m(di(D)) B' V̂C' E' ŴF'
Pelo item b) da Definição 13.26, BV̂C EV̂F . Utilizando o Teorema
13.30, temos
m(BV̂C) m(di(A' )) m(EV̂'F) m(di(D' )) di(A' ) di(D' ) .
De modo análogo, se obtém as outras quatro congruências no triedro
polar.
b) Sejam dA, dB e dC as medidas dos diedros de um triedro V(A,B,C) e f1,
f2 e f3 as medidas dos ângulos das respectivas faces no polar. Pelo
Teorema 13.24 temos f1 < f2 + f3 e pelo Teorema 13.30 temos f1 = – dA, f2 =
– dB e f3 = – dC. Logo,
dA dB dC dB dC dA .
Analogamente, obtemos dA + dC <+dB e dA + dB <+dC.
c) Seja V(A, B, C) um triedro qualquer. Pela Definição 13.20, a medida de
um diedro está compreendida entre 0 e . Como um triedro determina
três diedros, temos que: m(di(A)) + m(di(B)) + m(di(C)) é menor do
que 3. Considerando os ângulos das faces Â', B̂' e Ĉ' no polar, temos
pelo Teorema 13.25 que m(Â' ) m(B̂' ) m(Ĉ' ) 2 . Logo, pelo Teorema
13.30 temos que:
mdiC mdiA mdiB 2
3 2 mdiA mdiB mdiC
mdiA mdiB mdiC
Assim, mdiA mdiB mdiC 3 .
253
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Apresentaremos agora condições mínimas para que dois
triedros sejam congruentes.
Teorema 13.33: (1o caso - FDF) Se dois triedros têm duas faces cujos
ângulos são ordenadamente congruentes, e também o diedro
compreendido, então estes dois triedros são congruentes.
Demonstração: Sejam V(A,B,C) e W(D,E,F) dois triedros tais que
(1)
AV̂B DŴE
(2)
BV̂C EŴF
(3)
di(B) di(E).
Por (1) e (2) temos que AVC e DWFsão seções igualmente inclinadas
dos diedros congruentes (3). Logo, pelo Teorema 13.22, temos
(4)
AV̂C DŴF.
Por (1) e (4) temos que BV̂C e B' V̂' C' são seções igualmente
inclinadas e congruentes (2) dos diedros di(A) e di(D). Logo, pelo
Teorema 13.22, temos
(5)
di(A) di(D).
Por (2) e (4) temos que AV̂B e DŴE são seções igualmente inclinadas e
congruentes (1) dos diedros di(A) e di(D). Logo, pelo Teorema 13.22,
temos
(6)
di(C) di(F).
Portanto, por (1), (2), (3), (4), (5) e (6) temos o desejado.
Teorema 13.34: (2o caso - DFD) Se dois triedros, têm dois diedros e os
ângulos das faces comuns são ordenadamente congruentes, então os
dois triedros são congruentes.
Demonstração: Sejam V(A,B,C) e W(D,E,F) triedros com dois diedros
e as faces comuns ordenadamente congruentes. Então, pelo Teorema
13.30 seus polares V’(A’,B’,C’) e W’(D’,E’,F’) possuem dois ângulos de
faces e o diedro compreendido ordenadamente congruentes. Logo,
pelo Teorema 13.33 temos que V’(A’,B’,C’) e W’(D’,E’,F’) são
congruentes e pelo Corolário 13.32, V(A,B,C) e W(D,E,F) são também
congruentes.
254
13. Projeções, Distâncias, Ângulos, Diedros e Triedros
Teorema 13.35: (3o caso - FFF) Se dois triedros têm, os três ângulos das
faces ordenadamente congruentes, então os triedros são
congruentes.
Demonstração: Sejam V(A,B,C) e W(D,E,F) triedros tais que
(1)
AV̂B DŴE
(2)
BV̂C EŴF
(3)
AV̂C DŴF.
Por (1), (2) e (3) as seções dos diedros di(B) e di(B’) dadas por AV̂C e
DŴF, respectivamente, são igualmente inclinadas e congruentes.
Logo, pelo Teorema 13.22, temos di(B) di(F). Da mesma forma,
demonstramos que di(A) di(D) e di(C) di(D). Portanto, por
definição, V(A,B,C) é congruente a W(D,E,F).
Teorema 13.36: (4o caso - DDD) Se dois triedros possui, os três diedros
ordenadamente congruentes, então os triedros são congruentes.
Demonstração: Se V(A,B,C) e W(D,E,F) possuem os três diedros
ordenadamente congruentes então os seus polares V’(A’,B’,C’) e
W’(D’,E’,F’) possuem os ângulos das três faces ordenadamente
congruentes. Logo, pelo Teorema 13.35, V’ e W’ são congruentes.
Portanto, pelo Corolário 13.32, V(A,B,C) e W(D,E,F) são congruentes.
Observe que os três primeiros casos lembram os casos de
congruência de triângulos LAL, ALA, LLL e note que no caso dos
triângulos não temos AAA (que é um caso de semelhança), mas para
triedros temos DDD que é o 4º caso.
255
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Exemplos
13.18. No cubo, os oito triedros são congruentes entre si, pelo caso
FFF.
13.19. Na pirâmide, todos os triedros que contém a base são
congruentes entre si.
13.6. Exercícios
13.1. Num quadrilátero reverso de lados e diagonais congruentes entre
si mostrar que os lados opostos são ortogonais, assim como as
diagonais também o são.
13.2. Se duas alturas de um tetraedro se encontram, então as outras
duas também se encontram.
13.3. Classifique as afirmações abaixo em verdadeiras ou falsas,
justificando brevemente sua resposta :
a) A projeção ortogonal de um ponto num plano é um ponto.
b) A projeção ortogonal de uma reta num plano é uma reta.
c) A projeção ortogonal de uma reta perpendicular ao plano de
projeção é um ponto.
d) A projeção ortogonal de um segmento oblíquo a um plano, sobre
o plano, é menor que o segmento.
e) Se dois planos são perpendiculares, as projeções ortogonais dos
pontos de um sobre o outro é o traço dos pontos.
f) Retas paralelas tem projeções ortogonais paralelas (ou pontuais).
g) Se um segmento tem projeção sobre um plano, congruente a ele,
então ele é paralelo ou está no plano de projeção.
h) A distância entre duas retas é a distância entre um ponto qualquer
de uma a outra.
i) A distância entre dois planos paralelos é a distância entre um
ponto qualquer de um ao outro plano.
j) A distância entre duas retas reversas é a perpendicular comum a
essas retas.
256
13. Projeções, Distâncias, Ângulos, Diedros e Triedros
13.4. Mostre que: Se AB e CD são dois segmentos que estão em retas
paralelas a razão entre suas medidas é igual a razão entre as medidas
de suas projeções ortogonais A’B’ e C’D’ sobre um plano não
perpendi-cular a eles.
13.5. Mostre que todo plano que passa pelo ponto médio de um
segmento é eqüidistante dos extremos do segmento.
13.6. Dados dois pontos e uma reta, construir um plano eqüidistante
dos dois pontos, tal que:
a) Passe pela reta.
b) Seja paralelo a reta.
c) Seja perpendicular à reta.
A
13.7. Em um tetraedro regular ABCD, qual é
o ângulo formado por uma aresta e uma
face que não a contém? (Sugestão: Utilize
no desenho ao lado o triângulo ABH).
.
D
.
B
. ..
H
A’
C
13.8. Qual é o lugar geométrico dos pontos eqüidistantes de dois
planos secantes dados?
13.9. Seja P’ a projeção ortogonal de um ponto P sobre um plano e C
uma circunferência em de centro P’. Mostre que todas as retas
tangentes a esta circunferência em , estão a mesma distância de P.
13.10. Considere três retas mutuamente perpendiculares x, y e z,
concorrentes em O. Uma reta r passa por O e forma ângulos iguais a
, e com x, y e z, respectivamente.
a) Mostre que cos2+cos2+cos2=1
b) Calcule , se = = 60o º.
13.11. Sejam r e s duas retas reversas ortogonais e MN o segmento
perpendicular comum, com M r e N s. Tomam-se um ponto A
257
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
sobre r e um ponto B sobre s. Calcular o comprimento do segmento
AB em função de MA =a, NB=b, e MN =c.
13.12. Dois diedros são complementares (suplementares) se, e
somente se, suas seções normais são complementares
(suplementares). Dois diedros são adjacentes se, e somente se, as
seções normais são ângulos adjacentes. Um semiplano é bissetor de
um diedro quando ele possui origem na aresta do diedro e o divide em
dois diedros adjacentes e congruentes. Mostre que se dois semiplanos
são bissetores de dois diedros adjacentes e suplementares, então eles
formam um diedro reto.
13.13. Construir um semi-plano bissetor de um diedro dado.
13.14. Dois diedros são opostos pela aresta se, e somente se, as seções
normais são ângulos opostos pelo vértice. Mostre que dois diedros
opostos pela aresta são congruentes.
13.15. Verfique se existem triedros cujas medidas dos ângulos das
faces são dados por:
a) 45o, 55o, 90o
b) 90o, 90o, 90o
c) 210o, 90o, 80o
d) 1o, 2o, 3o
13.16. Se um triedro tem as medidas dos ângulos de suas faces iguais,
entre que valores poderá estar compreendida as medidas dos ângulos
de cada uma de suas faces.
13.17. Três retas r, s e t, não coplanares, se interceptam num ponto V.
Quantos triedros determinam?
13.18. Determine o intervalo que deve variar x, para que x, x+10 e x+50
sejam medidas em graus dos ângulos das faces de um triedro.
13.19. Considere um triedro e três planos construídos da seguinte
forma: cada um contém uma aresta do triedro e é perpendicular a sua
face oposta. Mostre que estes três planos têm uma reta em comum.
258
13. Projeções, Distâncias, Ângulos, Diedros e Triedros
13.20. Sejam ABCD um quadrado de lado 1 e um segmento AP também
de tamanho 1 e tal que AP é perpendicular ao plano do quadrado.
Calcule a medida do diedro di(PC,B,D).
259
Capítulo 14: Poliedros
A noção de poliedro depende da seguinte noção primitiva.
Noção Primitiva 8: Sólido Geométrico50.
Noção Primitiva 9: Interior de sólido geométrico.
Noção Primitiva 10: Fronteira de sólido geométrico.
Neste capítulo classificaremos alguns sólidos geométricos. Na
geometria plana conseguimos dentro do nosso contexto, encontrar
os polígonos e a circunferência como as principais figuras
geométricas. É claro que existem outras figuras planas tão
importantes quanto estas, mas para conceituá-las há a necessidade de
se avançar na teoria. No caso da geometria espacial ocorre a mesma
coisa, ou seja, apresentare-mos as principais figuras geométricas
espaciais que são possíveis de se definir dentro de um contexto
geométrico básico. No espaço encontra-mos os poliedros como os
objetos espaciais correspondentes aos polígonos do plano. Podemos
dizer equivalentemente que a circunfe-rência do plano corresponde
no espaço ao cilindro, ao cone e a esfera.
14.1. Figuras Poliédricas
Qualquer figura geométrica, ou seja, qualquer subconjunto do
espaço é denominado figura geométrica espacial. Como exemplos de
figuras geométricas espaciais temos os sólidos geométricos, alguns já
vistos em capítulos anteriores.
Na realidade, o que faremos nesta seção é identificar alguns
tipos de figuras geométricas espaciais.
50
A idéia de colocar sólido geométrico como noção primitiva é estabelecer um objeto
matemático que determina volume.
14. Poliedros
Definição 14.1: Uma figura poliédrica é a reunião de um número finito
de polígonos planos tais que:
a) A interseção de dois polígonos quaisquer ou é vazia, ou é um
vértice ou é um dos lados dos polígonos;
b) Dois polígonos contendo um lado em comum não são coplanares;
Os lados dos polígonos são denominados arestas. Os vértices
dos polígonos são denominados vértices.
Exemplos
14.1. Os seguintes desenhos representam figuras poliédricas.
(b)
(a)
(c)
(d)
(e)
(p)
(l)
(o)
(j)
(q)
(r)
(m)
261
(n)
(s)
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
14.2. Os seguintes desenhos não representam figuras poliédricas. O
desenho (a) não satisfaz os item (b) da Definição 14.1, o desenho (b) e
(c) não são uma reunião finita de polígonos planos. O desenho (d) não
satisfaz o item (a).
(a)
(c)
(b)
(d)
14.3. Nos capítulos anteriores vimos o octaedro, as figuras prismáticas
e as figuras piramidais que são figuras poliédricas. Por outro lado o
cilindro e o cone não são figuras poliédricas.
14.2. Superfícies Poliédricas
Definição 14.2: Uma superfície poliédrica é uma figura poliédrica
reunida com as regiões poligonais (não necessariamente todas)
determinadas pelos polígonos, denominadas faces da superfície
poliédrica, com as seguintes condições adicionais:
c) Cada aresta pertence a no máximo duas faces.
d) Existindo arestas que pertençam a uma só face elas devem formar
uma única poligonal fechada denominada contorno.
Quando a superfície não tiver contorno é dita fechada, caso contrário
ela será dita aberta.
Exemplos
14.4. Uma caixa de sapatos sem a tampa é uma superfície poliédrica
aberta, com a tampa será fechada e se não tiver nem tampa nem
262
14. Poliedros
fundo não será uma superfície poliédrica, pois neste caso não satisfaz
o item d) da Definição 14.2.
14.5. No Exemplo 14.1, com exceção do item (q) todos os outros
desenhos (incluindo as suas faces) representam superfícies
poliédricas. O item (q) não satisfaz o item (c) da Definição 14.2. Os
itens (m) e (p) representam superfícies poliédricas abertas, todos os
itens restantes representam superfícies poliédricas fechadas.
14.6. As superfícies prismáticas, piramidais e o octaedro são
superfícies poliédricas, mas as superfícies cônicas e cilíndricas não o
são.
Definição 14.3: Uma superfície poliédrica é convexa quando satisfizer
a seguinte condição adicional:
e) O plano de cada polígono deixa todos os outros polígonos num
mesmo semi-espaço.
É importante notar que uma figura poliédrica determina
polígonos enquanto que uma superfície poliédrica determina regiões
poligonais.
14.3. Poliedros
Definição 14.4: Chama-se poliedro o sólido geométrico determinado
por uma superfície poliédrica fechada juntamente com o seu interior.
Se a superfície for convexa, diremos que o poliedro é convexo. Os
pontos interiores à superfície poliédrica são chamados interior do
poliedro. A fronteira do poliedro é exatamente a superfície poliédrica
que o determina.
263
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Dada uma superfície poliédrica S, podemos considerá-la como
a reunião de um número finito de superfícies poliédricas convexas.
Sendo assim, o poliedro determinado por S é a união de todas as
interseções dos semi-espaços determinados pelas faces em cada parte
convexa de S.
Quando tivermos dois poliedros com faces e ângulos
ordenada-mente congruentes através de uma correspondência
biunívoca diremos que os poliedros são congruentes.
Como poliedro antes de mais nada é determinado por uma
figura poliédrica, ele é uma reunião finita de polígonos, além disso é
uma superfície poliédrica fechada, assim, temos que o número de
arestas de cada vértice de um poliedro é no mínimo 3.
Exemplos
14.7. Já conhecemos os seguintes poliedros: os prismas, as pirâmides e
o octraedro.
14.8. No Exemplo 14.1, vamos considerar também faces. Os desenhos
(m), (p) e (q) não representam poliedros. Os desenhos (h), (n), (r) e
(s) representam poliedros não convexos. Os restantes representam
poliedros convexos.
No diagrama abaixo apresentamos uma nova divisão dos
sólidos vistos até o momento.
264
14. Poliedros
Prismas oblíquos
Octraedros
Troncos de
pirâmides
romboedros
cubos
Prisma
regular
s
edo
píp
e
l
ale
par
tetraedros
pirâmides
Prismas retos
Poliedros
Sólidos que
não rolam
Cones
circulares
Cilindros
Tronco de
Cones
circulares
Sólidos que
rolam
14.4. Fórmula de Euler
Neste parágrafo trabalharemos apenas com poliedros
convexos. O seguinte resultado se refere a eles:
Teorema 14.5 (de Euler): Para toda superfície poliédrica convexa
fechada, vale a relação:
V – A + F = 2,
onde V é o número de vértices, A é o número de arestas e F é o
número de faces.
Demonstração: Consideremos um poliedro convexo P e seja r uma
reta que não seja paralela a nenhuma das faces do poliedro P (ela
sempre
sempre existe, pois existe um número
r
finito de faces). Tomemos também um P
plano , que não intercepta P e é
perpendicular a r. O plano será chamado
plano horizontal e as retas paralelas a r
(logo perpendiculares a ) serão chamadas
retas verticais. O plano divide o espaço
em dois semi-espaços, um dos quais
contém o poliedro P, chamare265
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
remos este de semi-espaço superior e diremos que seus pontos estão
acima de . A cada ponto x do semi-espaço superior, corresponde um
ponto x’ do plano , que chamaremos sombra de x, obtido através da
interseção do plano com a reta vertical que passa por x. A sombra
de qualquer conjunto X, contido no semi-espaço superior é, por
definição o conjunto X’, contido em , formado pelas sombras dos
pontos de X. A interseção de uma reta vertical com o conjunto
convexo limitado pelo poliedro P é um subconjunto de P, que pode
ser um segmento de reta cujos extremos pertencem a P, ou um único
ponto de P. Segue-se que uma reta vertical arbitrária só pode ter 0, 1
ou 2 pontos em comum com a superfície poliédrica determinada por
P. A observação anterior pode ser reformulada do seguinte modo:
cada ponto da sombra P’ do poliedro P é sombra de um ou de dois
pontos de . Ora, a sombra P’ do
poliedro P é um polígono convexo do plano
P
horizontal, cujo contorno ’ é a sombra de
uma poligonal fechada , formada por
arestas de P. Cada ponto de ’ é sombra de
’
um único ponto de P (pertencente a ). A
poligonal é chamada contorno aparente
P’
do poliedro P. Cada ponto interior de P’
(isto é, não pertencente a ’) é sombra de
dois pontos de . Dados dois pontos de P que têm a mesma sombra, ao mais
alto (mais distante de ) chamaremos ponto iluminado; o mais baixo
será chamado sombrio. Assim a superfície poliédrica se decompõe
em três partes disjuntas, a saber, o conjunto dos pontos iluminados, o
conjunto dos pontos sombrios e o contorno aparente . Seja P1 o
conjunto dos pontos iluminados de P unido com o contorno aparente
. Cada ponto de P’ é a sombra de um único ponto de P1. Em outras
palavras, a regra que associa a cada ponto x de P1 sua sombra x’ é uma
correspondência biunívoca entre P1 e P’. Usaremos a notação P1’ para
representar o polígono P’ decomposto como reunião de polígonos
justapostos, que são sombras das faces contidas em P1, isto é, das
faces iluminadas. Evidentemente, poderíamos também considerar o
conjunto P2, formado pelos pontos sombrios de P unido com o
266
14. Poliedros
contorno aparente . A regra que associa a cada ponto y de P2 sua
sombra y’ também é uma correspondência biunívoca entre P2 e P’.
Escrevemos P2’ para indicar a sombra de P2 expressa como reunião
das sombras das faces sombrias de P, isto é, contidas em P 2. Note que
se decompusermos cada face de P em triângulos, traçando diagonais
em cada uma delas, alteraremos os números F, A e V individualmente,
mas a expressão F – A + V permanecerá com o mesmo valor. De fato,
cada vez que se traça uma diagonal numa face, os números F e A
aumentam, cada um, de uma unidade e o número V não muda. Na
expressão F–A+V, os acréscimos de F e A se cancelam. Portanto, não
há perda de gene-ralidade em supor que todas as faces do poliedro P
são triângulos. Esta hipótese será feita de agora em diante. Segue-se
assim que 2A = 3F, já que toda face tem três arestas e cada aresta
pertence a duas faces. Para concluir a demonstação calculamos de
duas maneiras distintas a soma S dos ângulos internos dos triângulos
que compõe o poliedro P. Em pri-meiro lugar, há F triângulos e a soma
dos ângulos internos de cada um deles é igual a 2 ângulos retos, isto
é, radianos. Portanto, S = F. Como 2A = 3F = 2F + F, temos que F =
2A – 2F, assim, podemos escrever:
S = 2A – 2F
(1)
Por outro lado, temos S = S1 + S2, onde S1 é a soma dos ângulos
internos dos triângulos iluminados e S2 é a soma dos ângulos internos
dos triângulos sombrios. A fim de calcular S1, partimos da observação
bastante evidente (porém crucial) de que a soma dos ângulos internos
de um triângulo T é igual à soma dos ângulos internos de sua sombra
T’. Daí resulta que S1 é igual à soma dos ângulos internos dos
triângulos nos quais está decomposto o polígono convexo P1’, sombra
de P1. Para calcular esta última soma, somemos os ângulos vértice a
vértice, em vez de somá-los triângulo por triângulo, como acima.
Sejam V1 o número de vértices iluminados, V2 o número de vértices
sombrios e V0 o número de vértices do contorno aparente . Então,
V = V0 + V 1 + V 2.
267
(2)
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Observemos ainda que V0 é também o número de vértices (e de lados)
da poligonal ’, contorno do polígono convexo P’. Em P1’ temos V1
vértices interiores (sombras dos vértices iluminados) mais V0 vértices
no contorno ’. A soma dos ângulos que têm como vértice um dado
vértice interior é igual a 2 radianos (4 ângulos retos). A soma de
todos os ângulos que tem vértice sobre o contorno ’ é igual a (V0 –
2), de acordo com a expressão já vista da soma dos ângulos internos
de um polígono convexo com V0 lados. Segue-se que:
S1 = 2V1 + (V0 – 2)
(3)
Analogamente, obtemos que:
S2 = 2V2 + (V0 – 2)
(4)
Somando (3) e (4), e substituindo (2) obtemos que:
S = 2V – 4.
(5)
Comparando as igualdades (1) e (5), obtemos o desejado.
Esta demonstração foi obtida de um artigo de Zoroastro
Azambuja Filho na Revista do Professor de Matemática [1]. Gostaríamos de observar que, evidentemente, existem outras
demonstrações para o Teorema de Euler. Uma bastante interessante
pode ser encontrada também nesta revista num artigo de Elon Lages
Lima [4], cuja demonstração foi feita pelo matemático francês Adrien
Marie Legendre e que utiliza Geometria de Legendre.
Exemplos
14.9. Nas superfícies poliédricas que não são convexas a relação dada
no Teorema de Euler pode não ser verdadeira. De fato, nos desenhos
abaixo representamos duas figuras não convexas. No desenho (a) não
vale a relação de Euler, pois temos V = 16, A = 32 e F = 16. No desenho
(b) a relação de Euler é verdadeira, pois temos V = 14, A = 21 e F = 9.
268
14. Poliedros
(a)
(b)
14.10. O teorema de Euler está ligado a um conceito que engloba o de
poliedro convexo, razão pela qual vale para estes. Assim não é
necessá-rio que o poliedro seja convexo (apesar de ser suficiente)
para valer a relação de Euler (veja o item b) do exemplo anterior). A
propriedade está relacionada com o número de “buracos” que o
poliedro apresenta. De uma maneira geral, se um poliedro não possuir
buraco então temos V – A + F = 2. Veja que se o poliedro é convexo
então o poliedro não possui nenhum buraco. O mais interessante é
que o número de buracos do poliedro determina o valor de V – A + F e
quanto mais buracos, menor será este valor. Por exemplo, se o
poliedro possuir um buraco o valor será zero. Este problema é
fundamentado numa área da matemáti-ca chamada Topologia
Algébrica.
14.11. Para todos os poliedros já definidos vale a relação de Euler pois
são todos convexos.
Definição 14.6: Os poliedros para os quais é válida a relação de Euler
são chamados poliedros Eulerianos.
Pelo Teorema 14.5 e pelo Exemplo 14.9 todo poliedro convexo
é Euleriano mas nem todo poliedro Euleriano é convexo.
Corolário 14.7: A soma dos ângulos das faces de um poliedro convexo
é igual a
(V – 2). 2 rd.
269
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Demonstração: Sejam F o número de faces, V o número de vértices e
A o número de arestas. sejam n1, n2, ..., nF o número de lados de cada
uma das faces 1, 2,, ..., F, respectivamente. Para cada face temos que a
soma das medidas de seus ângulos vale: (n – 2). rd. Para as F faces
teremos:
S = (n1 – 2). + (n2 – 2). +...+ (nF – 2). rd =
= (n1 + n2 +...+ nF). – F.2.
Sendo n1+n2+...+nF = 2A, temos S = 2A. –F.2 ou S = (A – F).2. Como vale
a relação de Euler V – 2 = A – F, substituindo, teremos o resultado
desejado.
Prismas oblíquos
Octraedros
Troncos de
pirâmides
romboedros
cubos
Prisma
regular
os
ped
í
p
le
ale
par
Prismas retos
tetraedros
Poliedros
Eulerianos
Sólidos que
não rolam
Cones
circulares
pirâmides
Poliedros
não eulerianos
Cilindros
Tronco de
Cones
circulares
Sólidos que
rolam
14.5. Poliedros de Platão
Entre os poliedros eulerianos estão uma classe importante de
poliedros:
270
14. Poliedros
Definição 14.8: Chama-se poliedro de Platão ao poliedro que satisfaz
as três seguintes condições:
a) Todas as suas faces possuem o mesmo número n de arestas;
b) Todos os seus vértices possuem o mesmo número m de arestas;
c) Satisfaz à relação de Euler (é euleriano).
Exemplos
14.12. Os poliedros abaixos não são Platão pois não satisfazem alguns
dos itens da definição.
Não satisfaz o item a) e b)
Não satisfaz o item a)
Não satisfaz o item b)
Não satisfaz o item c)
O mais interessante dos poliedros de Platão é poder classificálos de uma forma simples:
Teorema 14.9: Existem somente cinco tipos de poliedros de Platão.
Demonstração: Cada uma das F faces tem n arestas, e como cada
aresta está em duas faces, assim:
271
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
2.A = n.F.
(14.1)
Cada um dos seus V vértices tem m arestas, e como cada aresta
contém dois vértices, logo:
2.A = m.V.
(14.2)
Como o poliedro é Euleriano, substituindo ((14.1) e ((14.2) na relação
de Euler, em função de A, teremos:
2A
2A
1 1 1 1
1 1 1 1
A
2
m
n
m 2 n A m n A 2
1 1 1
(14.3)
m n 2
Como vimos após a definição de poliedro, m 3 e da definição de
polígono, n 3 . Por outro lado m > 3 e n > 3, simultaneamente, sendo
m e n inteiros não satisfazem a equação ((14.3), visto que o primeiro
1
1 1
membro seria menor ou igual a
e o segundo é maior que
( é
2
2 A
positivo). Concluímos então que nos poliedros de Platão um dos
números m ou n deve ser 3. Para m = 3, teremos triedros.
Em ((14.3), vem:
1 1 1
1 1
n6
n 6 A n 6
(14.4)
Sendo n 3 e inteiro, concluímos que n pode assumir os valores 3, 4 e
5. Resumindo temos:
m
3
3
3
n
3
4
5
(14.5)
Para n = 3, as faces são triangulares.
Em ((14.3) vem
1 1 1
, donde por analogia, obtemos:
m 6 A
m
3
4
5
272
n
3
3
3
(14.6)
14. Poliedros
Examinando (14.5) e (14.6) concluímos que os poliedros de Platão são
os que tem os pares m e n abaixo
m n
3 3
3 4
(14.7)
3 5
4 3
5 3
e são, portanto, somente cinco tipos.
Como conseqüência do Teorema 14.9, para encontrar A, F e V
de cada poliedro de Platão, basta substituir os pares m e n de ((14.7)
em ((14.3) e em seguida em ((14.1) e ((14.2). Em resumo, tem-se:
M
3
3
3
4
5
n
3
4
5
3
3
A
6
12
30
12
30
F
4
6
12
8
20
V
NOME
4
Tetraedro
8
Hexaedro
20 Dodecaedro
6
Octaedro
12 Icosaedro
Tetraedros
Hexaedros
273
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Octaedros
Icosaedros
Dodecaedros
Com isto temos o seguinte diagrama:
Poliedros
de Platão
Icosaedros
romboedros
Prismas
regulares
Octraedros
Troncos de
pirâmides
cubos
tetraedros
hexaedros
dodecaedros
Sólidos que
não rolam
Cones
circulares
274
Poliedros
Eulerianos
Cilindros
Tronco de
Cones
circulares
pirâmides
Poliedros
não eulerianos
Sólidos que
rolam
14. Poliedros
14.6. Poliedros Regulares
Definição 14.10: Um poliedro convexo é chamado regular quando:
a) Suas faces são polígonos regulares e congruentes entre si;
b) Todos os seus vértices possuem o mesmo número m de arestas;
Da definição se conclui que todos os elementos de mesma
natureza de um poliedro regular são congruentes entre si.
Exemplos
14.13. Os poliedros abaixos não são regulares pois não satisfazem
alguns dos itens da definição.
Não satisfaz o item b)
Não satisfaz o item a)
Não satisfaz o item a) e b)
Não é convexo
Teorema 14.11: Os poliedros regulares são somente cinco, a menos da
medida das arestas.
275
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Demonstração: a) Faces regulares e congruentes entre si, logo cada
uma tem o mesmo número n de arestas;
b) os vértices tem o mesmo número m de arestas;
c) Poliedro convexo é Euleriano.
Pelas três conclusões anteriores temos que os poliedros regulares são
poliedros de Platão e são somente cinco, ou seja:
Tetraedro
Dodecaedro
Hexaedro
Octaedro
Icosaedro
Nem todos os poliedros de Platão são regulares pois nesses as
arestas não precisam ser congruentes.
Finalizamos este capítulo adicionando os poliedros regulares
ao diagrama dos sólidos geométricos, desenharemos apenas os
poliedros regulares como subconjuntos dos poliedros de Platão e os
poliedros de Platão como subconjuntos dos poliedros Eulerianos.
276
14. Poliedros
Poliedros
de Platão
Poliedros
de Regulares
Icosaedros
Octraedros
cubos
hexaedros
dodecaedros
tetraedros
Poliedros Eulerianos
14.7. Exercícios
14.1. Faça desenhos que satisfaça o item c) mas não satisfaz o item b)
na Definição 14.1.
14.2. Qual é a soma das medidas dos ângulos das faces de um
tetraedro?
14.3. Achar o número de vértices de um poliedro convexo que possui
12 faces triangulares.
14.4. Determinar o número de vértices de um poliedro convexo que
tem 3 faces triangulares, 1 face quadrangular, 1 pentagonal e 2
hexagonais.
14.5. O “cubo-octraedro” possui seis faces quadradas e oito
triangulares. Determinar o número de faces, arestas e vértices desse
sólido que é euleriano.
277
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
14.6. Idem para o “tetra-hexágono” (4 triângulos e 6 hexagonos)
14.7. Achar a natureza de uma pirâmide sabendo-se que a soma dos
ângulos das faces é 56 retos.
14.8. Um poliedro convexo tem 15 arestas. A soma dos ângulos de face
é 32 retos. Quantas faces tem de cada espécie sabendo-se que as
faces são quadrangulares e pentagonais?
14.9. Da superfície de um poliedro regular de faces pentagonais tiramse as três faces adjacentes a um vértice comum. Calcular o número de
arestas, faces e vértices da superfície poliédrica limitada convexa
aberta que resta.
14.10. Demonstre que as faces opostas de um octaedro regular são paralelas.
14.11. Quantas diagonais possuem um prisma cuja base é um polígono
convexo de n lados?
14.12. Calcule a soma dos ângulos diedros de um prisma reto que tem
por base um polígono convexo de n lados.
14.13. Mostre que as faces laterais de prismas retos são retângulos.
14.14. Mostre que as diagonais de um paralelepípedo retângulo são
congruentes e interceptam-se nos respectivos pontos médios.
14.15. Qual é a soma dos ângulos das faces de um poliedro convexo
que tem 11 faces e 18 arestas.
14.16. Um poliedro convexo de 28 arestas possui faces triangulares e
heptagonais. Quantas tem de cada espécie, se a soma dos ângulos das
faces é 64 retos?
14.17. Classifique as afirmações abaixo em verdadeiras ou falsas,
justificando brevemente sua resposta:
278
14. Poliedros
a) Há apenas cinco poliedros de Platão.
b) Todo poliedro convexo é um poliedro de Platão.
c) Todo poliedro de Platão é regular.
d) O hexaedro tem faces hexagonais.
14.18. Calcule o número de faces de um poliedro convexo sabendo que
a soma dos ângulos das faces é 720o e que este número é igual a 2/3
do número de arestas.
14.19. Mostre que não existe um poliedro convexo com número par de
faces, tendo cada uma o mesmo número par de lados e com número
ímpar de vértices.
14.20. O número de vértices de um poliedro convexo é igual ao
número de faces. Expresse o número de faces (ou de vértices) em
função do número de arestas. Conclua que o número de arestas não
pode ser ímpar.
279
Capítulo 15: Superfície Esférica e Esfera
Existem certos objetos geométricos que não se enquadram na
definição de poliedro, mas possuem um interesse especial pois são
bastante importantes para caracterizações e úteis na vida humana.
Estes objetos foram denominados corpos redondos e são caracterizados por possuirem em sua construção a utilização da circunferência e
do círculo. Até agora, os corpos redondos estudados foram: o cilindro
e o cone51.
Neste capítulo, finalizaremos o estudo dos principais corpos
redondos falando sobre esferas. Apresentaremos condições para
deter-minação de uma esfera e posições relativas, além de alguns
casos de inscrição e circunscrição.
15.1. Conceito e Propriedades
A esfera constitui mais uma classe de sólidos geométricos
asso-ciada aos corpos redondos.
Definição 15.1: Seja O um ponto no espaço e R um número real
positivo. A superfície esférica de centro O e raio R é o lugar
geométrico dos pontos X do espaço tais que o segmento XO possui
medida igual a R e será denotada por S(O,R) ou, simplesmente, S. A
esfera de centro O e raio R é o lugar geométrico dos pontos X do
espaço, tais que o segmento XO possui medida menor ou igual a R e
será denotada por S[O,R] ou, simplesmente, S . Duas superfícies
esféricas S(O,R) e S’(O’,R’) (ou esferas) são congruentes quando R =
R’.
51
Existem outros tipos que também podem ser considerados corpos redondos e não
possuem circunferências e círculos em suas construções, mas estes fogem ao escopo deste livro.
15. Esfera
Dada uma superfície esférica S(O,R), seus principais elementos
são:
Centro: é o ponto O.
Raios: segmentos com um extremo em O e outro em S.
Pontos interiores: são os pontos X tais que XO < R.
Pontos exteriores: são os pontos X tais que XO > R.
Cordas: segmentos com extremos em S.
Diâmetros: cordas que passam pelo centro O.
Seções: qualquer interseção de um plano (que possua ponto
interior) com S.
Eixo: é qualquer reta que contém o centro O.
Pólos relativos a um eixo: são os pontos de interseção do
eixo com S.
Equador relacionado a um eixo: é a seção perpendicular ao
eixo pelo centro da esfera.
Paralelo relacionado a um eixo: é uma seção perpendicular
ao eixo.
Meridiano: é uma seção cujo plano passa por um eixo.
Distância Polar: é a distância de um ponto qualquer de um
paralelo ao pólo.
Proposição 15.2: Numa superfície esférica S(O,R), toda corda AB que
não é diâmetro tem medida menor que a do diâmetro.
Demonstração: Consideremos o triângulo ABO, pois AB não é
diâmetro. Temos pela desigualdade triangular que AB AO OB. Consideremos o diâmetro AC. Então: AC AO OC AO OB AB.
15.2. Determinação de uma Superfície Esférica
Em geometria plana vimos que, para determinar uma circunferência, três pontos eram suficientes. O próximo resultado nos dá
condições suficientes para a obtenção de uma esfera:
281
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Teorema 15.3: Dados quatro pontos A, B, C, D não coplanares, existe
uma e somente uma esfera tal que sua superfície contenha A, B, C, D.
Demonstração: (Existência) Sejam A, B, C,
s
r
C
D quatro pontos não coplanares. O
conjunto dos pontos eqüidistantes de A, B
e C é uma reta r perpendicular ao plano A
ABC, passando pelo circuncentro do
B
triângulo ABC. De fato, dado um ponto X
D
O
r, seja M o circuncentro do triângulo ABC.
Temos AM BM CM,
m(A M̂ X) = m(B M̂ X) = m(C M̂ X) = 90o e XM é comum aos triângulos
AMX, BMX e CMX, assim estes triângulos são congruentes pelo caso
LAL, logo XA XB XC. Analogamente, o conjunto dos pontos
eqüidistantes de B, C e D é uma reta s perpendicular ao plano BCD
passando pelo circuncentro do triângulo BCD. Assim temos r= {X |
XAXBXC}, e
s = {X | XBXCXD}. Logo r e s estão no plano
mediador de BC. É claro que r s e assim podemos ter então r // s ou r
s ={ O }. Se r // s então pl(ABC) // pl(BCD), o que implica pl(ABC) =
pl(BCD), contradizendo a hipótese. Logo, r s = O e daí segue que
r s = {X | XA XB XC} {X | XB XC XD} = {X | XA XC XD}
Assim, temos uma esfera S de centro O e raio OA que passa por A, B,
C e D.
(Unicidade): Seja S’ uma outra esfera de centro O’ passando por A, B, C
e D. Como O’A O’B O’C O’D, temos que O’ r e O’ s. Logo,
O’=O. Como O’A é congruente AO, concluímos que S’= S.
Corolário 15.4: Existe uma única superfície esférica circunscrita num
tetraedro.
Demonstração: Como os vértices de um tetraedro são quatro pontos
não coplanares, pelo Teorema 15.3, existe uma única superfície
esférica que os contém.
282
15. Esfera
15.3. Posições Relativas
Plano e Superfície Esférica
Vamos analisar agora as posições
de um plano em relação a uma superfície
esférica. Sejam S uma superfície esférica de
centro O e raio R e um plano . Consideremos a distância OO' do ponto O ao plano
, sendo O’ o traço da reta perpendicular
que passa por O em . Temos três casos
possíveis:
Caso 1: OO' > R
Neste caso, qualquer que seja P ,
OP OO' R. Logo, P é ponto exterior e
assim S = . Diremos, neste caso, que
é exterior a S.
Caso 2: Se OO' =R, então qualquer que seja
P , P O’, OP OO' R. Logo, P é
ponto exterior e S = {O}. Diremos,
neste caso, que é tangente a S.
R
O
P
O’
R
O
P
O’
R
O
Caso 3: Se OO' <R então O’ é interior a S.
Neste caso, diremos que é secante à S e
S é determinado pelo seguinte
resultado.
Teorema 15.5: Sejam S(O,R) uma superfície esférica e um plano
secante a S, então S é uma circunferência.
Demonstração: Seja O’ o traço de O em pela perpendicular e XS.
Vamos mostrar que S é a circunferência C contida em de centro
283
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
2
O’ e raio R’ = R2 OO' . De fato, se Y S então OY = R e Y .
Logo, o triângulo YO’O é um triângulo retângulo e
2
2
2
2
2
2
YO' OY OO' R2 OO' =R’, como queríamos. Reciprocamente, se Y pertence a C então Y e OO’ é perpendicular a YO’. Logo,
2
YO YO' OO' R2 OO' OO' R2 R . Logo, Y S.
Definição 15.6: Quando um plano passa pelo centro de uma superfície
esférica S ele é denominado plano diametral e a circunferência C = S
é denominada circunferência máxima.
Corolário 15.7: Toda circunferência máxima possui raio igual ao da
superfície esférica que a contém.
O próximo resultado caracteriza os planos tangentes à uma
superfície esférica.
Teorema 15.8: Se A é um ponto de uma superfície esférica S então
existe um e somente um plano tangente a S tal que A .
Demonstração: (Existência) Se O é o centro de S, consideremos a
reta passando por O e A, e o plano perpendicular a AO por A. Temos
que A S, além disso, se B , OB OA. Portanto, é
tangente à S.
(Unicidade) Seja um outro plano
tangente à S, tal que A . Então sendo B
o pé da perpendicular de O em , temos
que OB tem medida menor ou igual a OA.
Se OB < OA , B é interior a S e, portanto é
A
B
O
secante a S, o que contraria a hipótese. Logo OB = OA e A=B.
Portanto, pelo Teorema 12.6, = .
284
15. Esfera
Reta e Superfície Esférica
Seja S uma superfície esférica de centro O e raio R e r uma reta
qualquer. Se O r, tomemos um plano qualquer que passa por r, e
se O r tomemos o plano = pl(r,O).
Em qualquer situação é um plano diametral e S é uma
circunferência máxima. Logo, a análise da interseção entre reta e
esfera se reduz a análise da interseção entre reta e circunferência
obtida no Capítulo 8 por meio da Proposição 8.10. Temos assim três
casos possíveis:
1. A distância de r a O é maior que R: Neste caso, diremos que r é
exterior a S.
2. A distância de r a O é igual a R: Neste caso, diremos que r é
tangente a S e o ponto de tangência é o ponto de interseção da reta
com
C = S.
3. A distância de r a O é menor que R: Neste caso, diremos que a reta r
é secante a S, S r são os pontos de interseção entre r e C = S.
Superfície Esférica e Superfície Esférica
Vamos determinar agora as posições relativas entre duas
superfícies esféricas. Sejam S e S’ duas superfícies esféricas de centros
O e O’ e raios R e R’. Consideremos dois casos:
1. Os centros O e O’ coincidem: Consideremos um plano passando
pelo centro O = O’. Temos, pelo Teorema 15.5, que intercepta S e S’
em circunferências concêntricas C e C’. Se os raios R e R’ são tais que
R < R’ então S é interna à S’. Se R = R’ então S = S’.
285
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
2. Os centros O e O’ são distintos: Consideremos um plano tal que
O, O’ . Teremos, novamente pelo Teorema 15.5, S = C e
S’ = C’ e, assim, as circunferências podem ter as seguintes posições
relativas:
a) C é exterior a C’ e, portanto, S é exterior a S’. Neste caso, a
interseção de S e S’ é vazia.
b) C é tangente exteriormente à C’ e, portanto, S é tangente
exteriormente a S’. Neste caso, a intersecção de S e S’ é o ponto de
interseção de C e C’.
S
O’
O
C
S’
C’
C O
C
C’
O’
C’
Caso b)
Caso a)
c) C é tangente interiormente à C’ e, portanto, S é tangente
interiormente a S’. Neste caso a intersecção de S e S’ é um ponto que
é o ponto de intersecção de C e C’.
d) C é interior à C’ e, portanto, S é interior a S’. Neste caso, a
intersecção de S e S’ é vazia.
C
286
C’
OOO’C’
C
C’
OOO’C’
15. Esfera
Caso c)
e) C e C’ são secantes e, portanto, S e S’ são
secantes. Neste caso, a intersecção de S e
S’ é dada pelo seguinte resultado:
Caso d)
C O
C
C’
O’
C’
Teorema 15.9: Sejam S e S’ superfícies esféCaso e)
ricas de centros O e O’ e raios R e R’. Se S e S’ são secantes então a
interseção é uma circunferência.
Demonstração: Seja um plano passando por O e O’, C = S, C’
= S’, A e B os pontos de interseção de C e C’. Temos que O e O’
são os centros de C e C’, respectivamente. Assim, a reta OO’ é a
mediatriz de AB (passando pelo ponto médio M). Seja ’ o plano
perpendicular a OO’ por M. Temos que OM < R e O'M < R’, pois
C
e C’ são secantes. Logo, pelo Teorema 15.5.b, ’ S é uma
circunferência C1 e ’ S’ é uma circunferência C1’, ambas com centro
M. Temos que A, B S S’, pois A, B C C’, com C S e C’ S’.
Além disso, como AB é perpendicular a OO’ por M, temos que A, B ’,
pois o plano ’ é o lugar geométrico das retas perpendiculares a OO’
por M. Logo, A, B S ’ = C1 e A, B S’ ’ = C1’ e, portanto,
A,
B C1 C1’. Como MA MB = R1, concluímos que o raio de C1 e de C1’ é
R1. Assim, C1 = C1’ = S S’.
15.4. Superfície Esférica e suas Partes
Vamos estudar algumas partes importantes da superfície
esféri-ca e também da esfera.
287
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Definição 15.10: Seja S uma superfície
esférica de centro O. Um fuso esférico de S
é a interseção de S com um diedro
(incluindo o interior) cuja aresta contém o
ponto O. Os pontos de interseção da aresta
com S são denominados vértices do fuso.
Um fuso esférico fica caracterizado pelo ângulo diedro e
pelo raio da superfície esférica.
Definição 15.11: Seja S uma superfície
esférica de centro O e S a esfera
determinada por S. Uma cunha esférica de
S é a interseção de S com um diedro
(incluindo o interior) cuja aresta contém o
ponto O.
A cunha esférica fica caracterizada pelo raio da superfície
esférica e pelo ângulo diedro.
Definição 15.12: Sejam S uma superfície esférica e um plano secante a S. Seja A
, a calota esférica é a interseção do semiespaço determinado por A com S. O setor
(ou segmento) esférico de uma base
determinado por A é a interseção do semiespaço determinado por A com a esfera S .
Definição 15.13: Sejam S uma superfície esférica de centro O, e e
planos secantes a S e paralelos. Seja r uma reta passando por O e
perpendicular a e , com traços A e B respectivamente. Se C está
288
15. Esfera
entre A e B, a zona esférica é a interseção
de S com a interseção dos semi-espaços
E,C e E,C. O setor (ou segmento) esférico
de duas bases é a interseção de S com a
interseção dos semi-espaços E,C e E,C.
Finalizamos este capítulo com o diagrama dos sólidos
geométricos:
Poliedros
de Platão
Icosaedros
romboedros
Prismas
regulares
Octraedros
Troncos de
pirâmides
cubos
tetraedros
hexaedros
dodecaedros
Sólidos que
não rolam
Cones
circulares
Cilindros
Tronco de
Cones
circulares
Poliedros
Eulerianos
pirâmides
Poliedros
não Eulerianos
Esferas
Cunha Esférica
Setor Esférico
Sólidos
Setor Esférico
de duas bases que rolam
Existem outros sólidos geométricos que não se enquadram
nos que foram apresentados. Podemos citar alguns corpos redondos
importantes, tais como o toro, o elipsóide, o parabolóide, o
hiperbolóide, porém estes não serão apresentados de uma maneira
formal, pois para isto precisamos de ferramentas que não dispomos
neste texto, a saber: geometria analítica e álgebra linear. O cálculo
diferencial e a geometria diferencial nos permite apresentar estes
sólidos através de equações algébricas. A seguir ilustramos alguns
deles.
289
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Toro
Elipsóide
Parabolóide Hiperbólico
Parabolóide Elíptico
Hiperbolóide de uma folha
Hiperbolóide de duas folhas
15.5. Exercícios
15.1. Mostre que a seção de uma esfera é um círculo.
15.2. Dizemos que dois círculos máximos são perpendiculares se
estiverem em planos perpendiculares. Mostre que para cada par de
círculos máximos existe um círculo máximo perpendicular a ambos.
15.3. Mostre que se um plano é tangente a uma superfície esférica S
num ponto A, então qualquer reta r contida em e contendo o ponto
A é tangente à S.
290
15. Esfera
15.4. Mostre que se um plano é tangente a uma esfera S de centro O
num ponto A, então o raio AO é perpendicular ao plano .
15.5. Mostre que por um ponto A numa superfície esférica S passam
infinitas retas tangentes.
15.6. Seja P um poliedro e S uma superfície esférica. Dizemos que P
está inscrito em S se todos os seus vértices pertencem a ela. Dizemos
que P está circunscrito em S se S tangencia P em todas as suas faces.
a) Mostre que num tetraedro regular inscrito, o raio da superfície
6
esférica mede
a, onde a é a medida da aresta do tetraedro.
4
b) Mostre que num tetraedro regular circunscrito o raio da superfície
6
esférica mede
a, onde a é a medida da aresta do tetraedro.
12
15.7. a) Mostre que se um cubo está inscrito numa superfície esférica
de centro O e raio r, então O é a interseção da diagonais do cubo.
Conclua que se a é a medida da aresta do cubo, temos que o raio
3
mede a
.
2
b) Mostre que se um cubo está circunscrito numa superfície esférica
de centro O e raio R então a superfície esférica tem como medida do
a
raio , onde a é a medida da aresta do cubo.
2
15.8. Se um octaedro está inscrito numa superfície esférica S e
circunscrito numa superfície esférica S’, mostre que S e S’ possuem o
centro na interseção das diagonais do octaedro. Conclua que o raio de
a 2
a 6
S’ mede
e o raio de S mede
onde a é a medida da aresta do
6
2
octaedro.
15.9. Dizemos que um cilindro C está inscrito numa superfície esférica
S se as bases de C estão contidas em S. Dizemos que C está
291
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
circunscrito a S se os planos da base e as retas geratrizes de C são
tangentes a S e se C contém um círculo máximo de S.
a) Mostre que todo cilindro reto está inscrito numa superfície esférica.
b) Mostre que todo cilindro reto está circunscrito numa superfície
esférica se, e somente se, sua altura for o dobro do raio da base.
15.10. Dizemos que um cone está inscrito numa superfície esférica S se
a circunferência de sua base e seu vértice estiverem contidos em S.
Dizemos que um cone está circunscrito a S se sua base e suas retas
geratrizes são tangentes a S.
a) Em que condições temos um cone reto inscrito?
b) Em que condições temos um cone reto circunscrito?
15.11. Mostre que a reta perpendicular a uma corda na superfície
esférica passando pelo centro divide a corda ao meio. Vale a
recíproca?
15.12. Mostre que uma esfera S é um conjunto convexo.
15.13. Sejam AB e CD diâmetros de uma superfície esférica. Mostre que
ABCD é um retângulo.
15.14. Demonstrar que duas circunferências máximas sempre se
interceptam em dois pontos.
15.15. Seja C uma circunferência e P um ponto exterior ao plano que
contém C. Mostre que existe uma única superfície esférica que
contém C e P.
15.16. Determinar uma superfície esférica S conhecendo uma
circunferência C contida em S e um plano tangente à S num ponto
dado de C.
15.17. Se A, B e D pertencem a uma superfície esférica S e C é a
circunferência determinada por A, B e D então C está contida em S.
292
15. Esfera
15.18. Construir por um ponto P dado um plano que intercepte uma
superfície esférica de centro O e raio R dada em uma circunferência de
raio r dado.
15.19. Determinar o lugar geométrico dos pontos de tangência com
uma superfíce esférica das retas traçadas por um ponto exterior a ela.
15.20. Encontrar uma esfera que tem o centro numa reta r dada, é
tangente a uma reta s dada em um ponto P dado.
293
Capítulo 16: Áreas e Volumes
Neste capítulo, acrescentaremos ao terceiro grupo de axiomas
aqueles relacionado a medida de volumes.
16.1. Axiomas
Os próximos axiomas tratam especificamente de medidas de
volumes.
Axioma III.9: A todo sólido geométrico S corresponde um único
número real positivo que denominaremos volume e denotaremos por
V(S) (lê-se volume do sólido).
Este axioma está garantindo a existência do volume a partir da
existência de um sólido.
Axioma III.10: Se um sólido geométrico é a união de dois ou mais
sólidos geométricos tais que dois a dois não tenham pontos interiores
em comum, então seu volume é a soma dos volumes daqueles.
Este axioma permite obter volumes de sólidos a partir de
outros sólidos com volume conhecido.
Axioma III.11: O volume de um poliedro determinado por um paralelepípedo retângulo é o produto da área da base pela altura.
Neste axioma estamos definindo uma unidade de volume na
qual todos os outros se basearão.
É claro que qualquer face de um paralelepípedo pode ser
considerada como base. Em qualquer caso, obtemos a mesma
resposta, pois a área da base vezes a altura é o produto das medidas
de três arestas com um vértice em comum.
16. Áreas e Volumes
Em particular, o volume de um cubo de aresta medindo a é o
cubo da medida da aresta.
Para o cálculo do volume de sólidos geométricos precisaremos
utilizar mais um axioma.
Axioma III.12 (Princípio de Cavalieri52): Dados dois sólidos S1 e S2, se
existe um plano tal que todo plano paralelo a que intercepta S1
e S2 determina em S1 e S2 interseções de áreas iguais, então o volume
de S1 é igual ao volume de S2.
A5
B5
A4
B4
A3
A2
A1
B3
B2
B1
A1 = B1, A2 = B2, A3 = B3 , A4 = B4 e A5 = B5 ,
Na realidade, o Princípio de Cavalieri não é um axioma, pois
pode ser demonstrado. Como não faremos sua demonstração, por
fugir ao escopo do livro, o colocamos como axioma.
Para se convencer deste princípio, tome o seguinte exemplo:
Considere uma pilha de cartões de papel. Não importa de que maneira
nós os empilhamos, o volume do sólido obtido será o mesmo.
16.2. Prisma
O prisma é o primeiro poliedro que se consegue obter
facilmen-te o seu volume utilizando o Princípio de Cavalieri. Antes
vamos calcular a área de uma superfície prismática.
52 Bonaventura Cavalieri nasceu em 1598 em Milão, Itália e morreu em 30/11/1647 em
Bolonha, Itália. Escreveu sobre muitos aspectos da matemática pura e aplicada sendo autor do
livro Geometria indivisibilis continuorum, publicada em 1635.
295
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Área Total
Vamos calcular a área total da superfície de um prisma e, para
isto, precisamos da seguinte definição:
Definição 16.1: A área lateral de um prisma é a área da superfície
lateral que é a soma das áreas dos paralelogramos. A área total de um
prisma é a soma da área lateral com as áreas das bases.
Assim, para o cálculo da área total de um prisma de base B
com n lados, basta obter a área da base AB que é a área de um
polígono e as áreas das faces laterais Ai, i = 1, 2,,n, que são
paralelogramos. Logo, teremos:
n
AT = 2.AB +
A .
i
i 1
Exemplos
16.1. Considere um paralelepípedo retângulo ABCDA’B’C’D’. Observemos que ele possui seis faces duas a duas congruentes:
ABB’A’ e DCC’D’, A’B’C’D’ e ABCD , ADD’A’ e BCC’B’.
A área de ABB’A’ é AB.BB' AB.CC' e a área
D’
C’
de ABCD é AB.BC. A área de ADD’A’ é
A’
B’
AD.DD' BC.CC' . Logo,
D
Ap=2. AB.CC' +2. AB.BC+2. BC.CC' =
C
= 2.( AB.CC' + AB.BC+ BC.CC' )
2
Em particular, no cubo temos Ac= 6. AB .
A
B
16.2. Num prisma regular, é mais simples o cálculo das áreas laterais e
total. Considere um prisma regular com perímetro da base igual a 2p,
onde p é um número positivo, e altura igual a h. Então, temos Al = n.A,
onde A é a área de uma das faces laterais. Logo,
2p
Al = n. .h = 2ph.
n
296
16. Áreas e Volumes
Portanto, At = Al + 2AB = 2ph + 2pm = 2p.(h + m).
Volume
O volume de um prisma é dado pelo seguinte resultado:
Teorema 16.2: O volume de um prisma é o produto da área da base
pela medida da altura.
Demonstração: Sejam A e h a área da base B e a altura de um prisma
dado. Consideremos um paralelepípedo retângulo, cuja base B’ tem
área A e altura h e que B’ está no mesmo plano de B. Pelo Exercício
11.11, todas as seções dos dois prismas terão a mesma área A. Pelo
Axioma III.12, os dois prismas possuirão o mesmo volume. Pelo
Axioma III.11, o volume do paralelepípedo retângulo é A.h, assim o
teorema fica demonstrado.
Exemplos
16.3. Volume de um prisma triangular
Área do triângulo da base:
ah
AT =
2
H
h
a
Volume do Prisma triangular:
VP = H. AT =
ahH
2
16.3. Pirâmide
Utilizando o volume do prisma calcularemos o volume da
pirâmide.
297
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Área Lateral e Total
Da mesma maneira que fizemos para o prisma, para obtenção
da área da pirâmide utilizamos todas as faces da mesma.
Definição 16.3: A área lateral de uma pirâmide é a área da superfície
lateral. A área total de uma pirâmide é a soma da área lateral com a
área do polígono da base.
Assim, para o cálculo da área total de uma pirâmide cuja base
B possui n lados, basta calcular a área da base AB que é a área de um
polígono e somar com as áreas das faces laterais Ai, i = 1, 2,,n, que
são triângulos. Logo, teremos:
n
AT = AB +
A .
i
i 1
Exemplos
16.4. Numa pirâmide regular, é mais simples o cálculo das áreas lateral
e total. Considere uma pirâmide regular com perímetro da base igual a
2p, onde p é um número positivo, altura da base igual a m e apótema
das faces laterais da pirâmide igual a m’. Então, temos Al = n.A, onde A
é a área de uma das faces laterais. Logo,
1 2p
Al = n. .m' p.m'
2 n
Portanto, At = Al + AB = pm’ + pm = p.(m + m’).
Volume
Vamos agora calcular o volume de uma pirâmide. Para isto,
necessitaremos de três lemas.
Lema 16.4: Numa pirâmide triangular (ou tetraedro) temos:
a) As arestas laterais e a altura ficam divididas numa mesma razão k,
por um plano paralelo a base.
b) A seção paralela à base e a base são triângulos semelhantes.
298
16. Áreas e Volumes
c) A razão entre as áreas da seção paralela à base e a base é igual ao
quadrado da razão k (dada pelo item a)).
Demonstração: Considere uma pirâmide
V
V(A,B,C) de altura medindo h e base com
área b. Seja A’B’C’ uma seção paralela a
h’ D’
A’
base ABC de altura medindo h’ com área b’.
C’
H’
(Veja desenho ao lado)
B’
a) Tomando-se um plano paralelo a base o
h
A
D
C
resultado segue imediatamente do
H
Teorema
11.11,
ou
seja,
B
VB' VC' VA' VH' h'
.
VB VC VA VH h
b) Temos que os ângulos do triângulo base e os ângulos do triângulo
seção são congruentes, pois estão em planos paralelos e lados
respecti-vamente paralelos. Portanto a seção e a base são triângulos
semelhan-tes.
c) Primeiramente, observamos que VA’C’ e VAC são semelhantes. O
mesmo ocorre com VA’B’ e VAB. Sejam BD e B’D’ alturas de ABC e
A’B’C’ em relação as bases AC e A’C’, respectivamente. Então
B'D' A'C' VA' h'
k .
BD
AC VA h
1
A' C'B'D' A' C' B'D' h' h' h' 2
Área(A' B' C' ) 2
.
. k2 .
Logo,
1
Área(ABC)
ACBD AC BD h h h
2
Lema 16.5: Duas pirâmides triangulares de alturas congruentes e com
áreas das bases iguais têm volumes iguais.
Demonstração: Sejam P1(V1A1B1C1) e P2(V2A2B2C2) pirâmides de bases
medindo b1 e b2 e alturas medindo h1 e h2, respectivamente. Suponhamos, sem perda de generalidade que, pl(A1,B1,C1)=pl(A2,B2,C2)= e que
V1 e V2 estão no mesmo semi-espaço determinado por pl(A1,B1,C1). Seja
um plano paralelo a que intercepta as pirâmides, distando h dos
299
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
vértices V1 e V2 e que determina seções S1 e S2 com áreas b’1 e b’2,
b' h
respectivamente. Temos 1
b1 h1
2
2
e
b'2 h
.
b2 h2
b1' b'2
. Mas, b1=b2, assim,
b’1 =
b1 b2
b’2. Portanto, as seções S1 e S2 possuem a mesma área. Pelo Princípio
de Cavalieri, P1(V1A1B1C1) e P2(V2A2B2C2) possuem o mesmo volume.
Como, por hipótese temos h1 = h2,
Lema 16.6: O volume de uma pirâmide triangular é um terço do
produto da área da base pela medida da altura.
Demonstração: Consideremos uma pirâmiA
de triangular P(VABC) conforme desenho
C
B
ao lado. Construamos um prisma triangular
com arestas DB e EC paralelas a VA, tais
que VA = DB = EC. Logo, o plano pl(V,D,E) é
paralelo ao plano pl(A,B,C). O plano
V
pl(V,B,C) divide o prisma em duas
pirâmides: P(VABC) e P(VBCDE) a primeira E
D
triangular e a segunda
quadrangular (ver desenho ao lado). Na pirâmide quadrangular o
plano pl(V,C,D) divide-a em duas pirâmides triangulares: P(VBCD) e
P(VCDE). Como BCED é um paralelogramo, os triângulos BCD e CDE
são congruentes. Logo, pelo Lema 16.5, as pirâmides P(VBCD) e
P(VCDE) possuem o mesmo volume. Além disso, VDE e ABC são
congruentes e, assim, as pirâmides P(VABC) e P(CVDE) possuem o
mesmo volume. Logo, o prisma é obtido por três pirâmides
inteiramente disjuntas e com o mesmo volume. Pelo Axioma III.10,
temos que o volume do prisma de bases ABC e VDE é igual a soma dos
volumes das pirâmides P(VABC), P(VCDE) e P(VBCD). Portanto,
A(ABC).h = 3 Vol (P(VABC)). Assim, temos o desejado.
Teorema 16.7: O volume de uma pirâmide é um terço do produto da
área da base pela medida da altura.
300
16. Áreas e Volumes
Demonstração: Seja P(VA1A2...An) uma pirâmide com base poligonal
B de n lados de área AB e altura medindo h. Em primeiro lugar observamos que um polígono de n lados pode ser dividido em (n – 2)
triângulos. Logo, a pirâmide P(VA1A2...An) pode ser decomposta em (n–
2) pirâmides de bases triangulares, P1,P2,...,Pn-2 com bases de áreas
b1, b2, ..., bn-2. Logo, pelo Axioma III.10,
Volume(P(VA1A2...An))=V(P1)+...+V(Pn-2)=
1
1
1
1
1
= b1.h b2.h ... bn 2.h b1 ... bn 2 .h AB.h
3
3
3
3
3
Exemplo
16.5. Vamos calcular o volume da pirâmide
regular hexagonal. A área da base é dada
R2 3 3 3R2
=
, onde R é o raio
4
2
da circunferencia circunscrita ao hexágono. Assim, o volume da
pirâmide
regular
hexagonal é dado por
3 3R2
h
3 2
2
VP =
R h.
3
2
h
por AB = 6.
R
16.4. Cilindro
Por ser um corpo redondo, o cálculo da área de um cilindro é
mais complexo. Por isto, faremos primeiramente o cálculo do volume
do cilindro que também utiliza o Princípio de Cavalieri.
Volume
Para o cálculo do volume do cilindro consideremos um cilindro
de base B com área AB e altura medindo h. Seja agora um prisma com
301
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
a mesma área da base e a mesma medida de altura, pelo Princípio de
Cavalieri temos que o cilindro e o prisma possuem o mesmo volume.
Logo,
V(cilindro)=V(prisma)=AB.h = R2.h.
Demonstramos, assim, o seguinte resultado:
Teorema 16.8: O volume de um cilindro é o produto da área da base
pela medida da altura.
Exemplos
16.6. Vamos calcular o volume do cilindro
regular. A área da base é dada por AB =
R2, onde R é o raio da circunferencia da
base. Assim, o volume do cilindro regular é
VC = R2h.
h
R
Área Lateral e Total
Vamos calcular a área da superfície lateral do cilindro, mas
antes vamos apresentar os conceitos necessários:
Definição 16.9: Consideremos dois cilindros e ’, com bases em
centros iguais e mesmo plano, de mesma altura h e raios R + e R. A
casca cilíndrica, denotada por – ’, tem para volume:
V(– ’) = V() – V(’) = (R + )2h – R2h = 2Rh + 2h.
O volume médio da casca é definido por:
V( ' )
2Rh h .
A área da superfície lateral de um cilindro de raio r é o volume médio
da casca cilíndrica, quando é arbitrariamente pequeno53. A área total
53
O termo “ é arbitrariamente pequeno” significa que para qualquer número real x
dado, teremos < x.
302
16. Áreas e Volumes
da superfície cilíndrica é a soma da área da superfície lateral com a
área das bases.
Proposição 16.10: A área da superfície lateral de um cilindro de altura
medindo h e base de raio medindo R é 2Rh.
Demonstração: Segue imediatamente da definição.
O cálculo da área lateral de um cilindro pode ser visto intuitivamente
consideran-do a superfície lateral do
cilindro equivalen-te a um retângulo cujos
lados são respecti-vamente congruentes à
altura h do cilindro e ao comprimento 2R da
circunferência da ba-se. Isto é ilustrado no
desenho ao lado. Isto nos fornece
intuitivamente a fórmula dada pela
Proposição 16.10. A área total do cilin-dro
assim obtida é dada por
AT = AL + 2AC = 2Rh + 2R2 = 2R(h+R).
h
R
h
R
16.5. Cone
De maneira análoga ao caso do cilindro, o cálculo da área é
mais complexo. Por isto, faremos primeiramente o cálculo do volume
do cone que também utiliza o Princípio de Cavalieri.
Volume
Para o cálculo do volume do cone precisaremos do seguinte
resultado:
303
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Lema 16.11: Sejam C um cone de altura h e uma seção transversal de C
obtida por um plano paralelo a base que dista k do vértice V de C.
2
k
Então a área da seção é igual a vezes a área da base.
h
Demonstração: Considere o desenho ao
lado, onde P e Q são pontos quaisquer na
base do cone e T o pé da perpendicular por
V no plano da base. Temos VPT semelhante
a VP’T’, pelo caso AAA. Logo,
VP' VT' k
. Temos também VQT
VP VT h
semelhante a VQ’T’, pelo caso AAA. Logo,
VQ' VT' k
. Como
VQ VT h
V
Q’
P’
Q
P
k
T’ h
T
os triângulos VPQ e VP’Q’ possuem ângulo em comum e
VP' k VQ'
temos que VPQ e VP’Q’ são triângulos semelhantes.
VP h VQ
P' Q' VP' k
k
e, portanto, P' Q' .PQ. Assim, se Q está sobre
PQ VP h
h
a circunferência de centro P e raio R da base do cone, então Q’ está
sobre a circunferência de centro P’ e raio R’ dado por
Logo,
R'
k
k
. PQ . R na transversal. Portanto, a seção transversal é um
h
h
2
k
círculo de raio R’ e a área é dada por .R'2 . . R2 , que é igual a
h
2
k
vezes a área da base, como queríamos demonstrar.
h2
Teorema 16.12: O volume de um cone é um terço do produto da área
da base pela medida da altura.
304
16. Áreas e Volumes
Demonstração: Utilizando o volume do tetraedro, o Lema 16.4, o
Lema 16.11 e o princípio de Cavalieri, obtém-se o resultado. Os
detalhes ficam como exercício.
Área Lateral e Total
Assim como no cilindro para calcular a área da superfície
lateral e total de um cone precisaremos antes apresentar alguns
conceitos:
Definição 16.13: Consideremos dois cones
e ’, com bases em centros iguais e mesmos
x
planos, de alturas h e h+ e raios R e R + . A
g
casca cônica, denotada por – ’, tem para
h
volume V() – V(’). O volume médio da
R x
V() V(' )
casca é definido por
, onde x é
x
dado no desenho acima. A área da superfície lateral de um cone de
raio R é o volume médio da casca cônica, quando x é arbitrariamente
pequeno. A área total da superfície cônica é a soma da área da
superfície lateral com a área da base.
Proposição 16.14: A área da superfície lateral de um cone de altura
medindo h e base de raio medindo R é Rg, onde g =
R2 h2 .
Demonstração: Primeiramente, observamos que o volume da casca
1
1
cô-nica é igual a V() – V(’) = (R )2 (h ) R2h .
3
3
R2 h2 , por semelhança de triângulos,
g
g
g
g
calculamos e em função de x, x e x .
x R
R
x h
h
Substituindo no volume da casca obtemos
1
g
g
1
V() – V(’) = (R x)2 (h x) R2h
3
h
R
3
Consideremos g =
305
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
1
2g2 2 g2 2 g3 3
Rgx 2Rgx
x x 2 x .
3
h
h
hR
Logo, o volume médio da casca é dado por:
V( ' ) V() V(' ) 1
3g2
g3
3Rg
x 2 x2 .
x
x
3
h
hR
Tomando x arbitrariamente pequeno, temos AL = Rg.
Corolário 16.15: A área total do cone é dada por
AT(cone) = Rg + R2 = R(R + g)
Demonstração: Imediata.
V
O cálculo da área lateral de um
cone pode ser visto intuitivamente
considerando a superfície lateral do cone
R
equivalente ao setor circular, cujo raio é
uma geratriz do cone e cujo comprimento
do arco é o comprimento da circunferência
da base do cone (veja desenho ao lado).
Isto nos fornece a fórmula
2R
1
AL cone .2R.g .R.g .
2
16.6. Esfera
Vamos agora calcular o volume e a área de uma esfera.
306
g
16. Áreas e Volumes
Volume
A obtenção do volume da esfera é conseqüência do Princípio
de Cavalieri.
Teorema 16.16: O volume de uma esfera de raio R é
4 3
R .
3
Demonstração: Consideremos um cilindro C de raio R e altura 2R,
com base num plano tangente a uma superfície esférica de uma
esfera de raio R.
A’
B’
L
a
V
2R
O
R
A
R
M
R
B
Consideremos dois cones C1 e C2 com mesmo vértice V, no interior do
cilindro, conforme se observa no desenho acima. Um plano que
corta os sólidos fornecerá as seguintes seções:
O triângulo A’B’V é semelhante a ABV. Como ABV é isósceles temos
que A’B’V também é isósceles, ou seja, A' B' A' V a. Logo, a área da
2
2
coroa circular é (R2 – a2) e a do círculo é LM . Mas LM R2 a2 .
Logo, as seções possuem áreas iguais, para qualquer plano secante.
Pelo Princípio de Cavalieri, o volume da esfera E é igual ao volume do
cilindro C menos os volumes dos cones, ou seja,
307
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
1
1
4
V(S) V(C) V(C1) V(C2 ) 2R3 R3 R3 R3 .
3
3
3
Corolário 16.17: a) O volume da cunha esférica é
ângulo diedro.
b) O volume de um setor esférico é dado
h 2
por V
(3R h2 ) .
6
2 3
R . , onde é o
3
O’
O
c) O volume de um setor esférico de duas bases é
1
V .h h2 3 R12 R22 ,
6
onde h é a distância entre os planos e , R1 e R2 são os raios das
bases.
Demonstração: a) A cunha esférica é caracterizada pelo raio da
esfera e pelo ângulo diedro. Estas duas medidas nos fornecem o
volume da região determinada pela cunha. De fato, seja r o raio de
uma esfera e a medida do diedro, então temos que se = 2 a
cunha esférica é toda a esfera de raio R. Utilizando a relação de
proporcionalidade teremos:
Vcunha
2
Vcunha R3. .
4 3 2
3
R
3
b) Com sólidos semelhantes na demonstração do Teorema 16.16,
temos que as áreas da coroa circular e a do círculo eram iguais. Assim,
neste caso, temos o seguinte desenho:
308
16. Áreas e Volumes
R–h
h
O
R
Vamos então calcular o volume do cilindro menos o tronco do cone.
Temos que:
O volume do cilindro é V(C) = R2h;
1
O volume do cone maior é V(CM) = R3;
3
O volume do cone menor é
1
1
1
V(Cm) = (R – h)3 = R3 – R2h + Rh2 – h3;
3
3
3
O volume do tronco de cone é
V(T) = V(CM)–V(Cm) =
1
1
1
1
= R3 – ( R3 – R2h + Rh2 – h3) = Rr2h – Rh2 + h3.
3
3
3
3
Assim, o volume do setor esférico é
1
1
V(S) = V(C) – V(T) = R2h – (R2h – Rh2 + h3) = Rh2 – h3.
3
3
c) Temos
h = h1 + h2,
R = h12 + R12 e
R 2 = h22 + R 22.
2
Logo,
h12 + h22 = h2 – 2h1h2
e
h13 + h23 = h3 – 3h12h2 – 3h1h22.
Com raciocínio semelhante ao item b) temos
O volume do cilindro superior é V(CS) = R2h1;
O volume do cilindro inferior é V(CI) = R2h2;
1
O volume do cone inferior é V(COS) = h23;
3
309
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
1
h13;
3
Assim, o volume do setor esférico de duas bases é
V(S) = V(CS) + V(CI) – (V(COS) – V(COI)) =
1
1
= R2(h1 + h2) – (h13 +h23) = R2h – (h13 +h23) =
3
3
1
1
1
= R2h + R2h – (h3 – 3h12h2 – 3h1h22) =
2
2
3
1
1
1
= (h12 + R12)h + (h22 + R22)h – h3 + h12h2 + h1h22 =
2
2
3
1
1
1
= (h12 + h22)h + (R12+ R22)h – h3 + h1h2(h1 + h2) =
2
2
3
1
1
1
= (h2 – 2h1h2)h + (R12+ R22)h – h3 + h1h2h =
2
2
3
1 3 1 3 1
1
= h – h + ( R12+ R22)h = h(h2 +3(R12+ R22)).
2
3
2
6
O volume do cone superior é V(COI) =
Área
Para calcular a área da superfície esférica vamos apresentar
primeiramente alguns conceitos:
Definição 16.18: Consideremos duas esferas concêntricas E e E’ de
raios R + e R. A casca esférica, denotada por E – E’, tem para volume:
4
4
4
3
V(E E' ) V(E) V(E' ) R R3 4R2 4R2 3
3
3
3
O volume médio da casca é definido por:
V(E E' ) V(E) V(E' )
4
4R2 4R 2
3
A área da superfície esférica de raio R é o volume médio da casca
esférica, quando h tende a zero.
Teorema 16.19: A área da superfície esférica de raio R é 4R2.
310
16. Áreas e Volumes
Demonstração: Segue imediatamente da definição.
Corolário 16.20: a) A área de um fuso esférico é 2R2.α, onde R é o raio
da superfície esférica e é a medida do ângulo diedro.
b) A área de uma calota esférica é dada por S = 2.R.h.
c) A área da zona esférica é S = 2.R.h, onde h é a distância entre os
planos e .
Demonstração: a) Um fuso esférico é caracterizado pelo ângulo
diedro e pelo raio da esfera. Este ângulo e o raio nos fornecem a
área da superfície determinada pelo fuso. De fato, seja a medida do
diedro, então temos que se = 2 o fuso esférico é toda a esfera de
raio R. Utilizando a relação de proporcionalidade teremos:
Af uso
Af uso 2R2. .
2
2
4R
b) Utilizando o volume do setor esférico dado no Corolário 16.17,
calculamos o volume médio da casca, ou seja, considerando duas
esferas concêntricas E e E’ com raios R + e R e alturas h + e h.
Temos que o volume do setor esférico de E é:
V(SE) = (h2 + 2h + 2)(R + ) – (h3 + 3h2 + 3h2 + 3) =
3
= ( h2R + 2hR + 2R + h2 + 2h2 + 3) – (h3 + 3h2 + 3h2+3)
3
e o volume do setor esférico de E’ é:
V(SE’) = h2(3R – h) = h2R – h3.
3
3
Assim, quando tende para zero, temos Acalota = 2Rh, como
queríamos demonstrar.
c) Para calcular a área da zona esférica utilizaremos o item b), pois a
área do fuso esférico é a área da esfera menos a área de duas calotas.
Temos que h = 2R – (h1 + h2). A área do fuso é dada por
Afuso = A(E) – Acalota(C1) – Acalota(C2) = 4R2 – 2R(h1 + h2) =
= 2R(2R – (2R – h)) = 2Rh.
311
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
16.7. Exercícios
16.1. Calcule o volume de um cubo inscrito numa superfície esférica de
raio R.
16.2. Calcule o volume de um cubo circunscrito numa superfície
esférica de raio R.
16.3. Calcule o volume de um tetraedro regular inscrito numa
superfície esférica de raio R.
16.4. Calcule o volume de um tetraedro regular circunscrito numa
superfície esférica de raio R.
16.5. Calcule o volume de um octaedro regular inscrito numa superfície
esférica de raio R.
16.6. Calcule o volume de um octaedro regular circunscrito numa
superfície esférica de raio R.
16.7. Duas esferas congruentes com 10 cm de raio passam uma pelo
centro da outra. Qual o volume da região comum?
16.8. Qual a área de uma superfície esférica na qual uma circunferência
máxima possui 20 cm de comprimento.
16.9. Mostre que a área lateral de um cilindro circunscrito a uma esfera
é igual a área da superfície esférica e a quatro vezes a área de um
círculo máximo.
16.10. Dois paralelepípedos retângulos têm a soma das arestas iguais e
uma das diagonais também igual. Mostre que as áreas totais são as
mesmas.
312
16. Áreas e Volumes
16.11. Dada uma pirâmide regular de base quadrada, encontrar a aresta
da base, dada a altura H da pirâmide e sabendo que a área lateral
h2
excede em 3
a área da base.
2
16.12. Um tronco de prisma tem como base um triângulo de área
medindo x. Calcular o volume do tronco, sabendo que as arestas
laterais medem a, b e c
16.13. Compra-se uma lata na forma cilíndrica de brigadeiro pronto
cujas medidas são 7,4 cm de altura e 7,4 cm de diâmetro. Supondo
que a lata esteja completamente cheia e que cada brigadeiro terá o
formato de uma esfera de raio 1 cm, quantos brigadeiros
aproximadamente é possível fazer com uma lata. Se numa festa cada
pessoa consome em média 6 brigadeiros, quantas latas serão
necessárias para uma festa de 30 pessoas.
16.14. Dada a medida a das arestas de um cubo, determinar a área
lateral e o volume de uma pirâmide que tem por base uma face do
cubo e por vértice o centro da face oposta.
16.15. a) Determine o volume de um cone inscrito numa superfície
esférica.
b) Determine o volume de um cone circunscrito numa superfície
esférica.
16.16. a) Determine o volume de um cilindro inscrito numa superfície
esférica.
b) Determine o volume de um cilindro circunscrito numa superfície
esférica.
16.17. Considere uma pirâmide regular P(VA1A2...An). Seja um plano
secante a ela e paralelo a sua base. A parte da pirâmide localizada no
mesmo semi-espaço de V determinado por é também uma pirâmide
P’(VB1B2...Bn). A parte da pirâmide localizada no semi-espaço oposto a V
é denominada tronco de pirâmide de base maior A1A2...An e base
menor B1B2...Bn.
313
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
a) Mostre que as arestas laterais do tronco são congruentes entre si.
b) Mostre que as bases maior e menor são polígonos regulares
semelhantes.
c) Mostre que as faces laterais são trapézios isósceles, congruentes
entre si. A altura desses trapézios é denominada apótema do
tronco.
d) Mostre que a nova pirâmide e a pirâmide primitiva são
semelhantes.
e) Sendo 2p o perímetro da base maior, 2p’ o perímetro da base
menor, d a apótema do tronco, m a apótema da base maior e m’ a
apótema da base menor, mostre que a área lateral do tronco de
pirâmide é dada por Al = (p + p’). d e a área total do tronco de
pirâmide é dada por
At = (p + p’). d + p.m + p’.m’.
f) Sendo d a distância entre as bases maior e menor, b a área da base
maior e b’ a área da base menor Mostre que o volume é dado por
d
V b b.b'b' .
3
16.18. Dois sólidos geométricos são ditos semelhantes se existe uma
correspondência biunívoca entre seus pontos, tal que a razão entre as
medidas dos segmentos correspondentes seja constante. Este
número constante é denominado razão de semelhança. Dadas duas
pirâmides semelhantes, mostre que:
a) A razão entre as áreas das bases, áreas laterais e áreas totais é
igual ao quadrado da razão de semelhança;
b) A razão entre os volumes é igual ao cubo da razão de semelhança.
16.19. Consideremos um cone de base C e vértice V.
a) Mostre que ao traçarmos um plano paralelo à base interceptando o
cone obtemos uma circunferência C’ de raio menor ou igual ao de C.
b) O plano do item a) divide o cone em dois sólidos: um deles é o
cone de base C’ com vértice V e o outro chamado tronco de cone
de bases C e C’. Mostre que o volume do tronco de cone é dado
por
d 2
V
R Rr r 2 ,
3
314
16. Áreas e Volumes
onde R é o raio de C, r é o raio de C’ e d é a distância entre as bases.
c) Mostre que a área lateral e total do tronco de cone são
respectivamente:
AL = .(R + r).g e AT = .[R(g + R) + r.(g+r)],
onde R é o raio de C, r é o raio de C’ e g é a geratriz do tronco.
16.20. a) Dada uma superfície cilíndrica circular ilimitada determinada
por uma circunferência C de centro O e raio r num plano . Mostre
que a intersecção de qualquer plano paralelo a com o cilindro
ilimitado é uma circunferência congruente a C.
b) A seção meridiana de um cone é a interseção do cone com um
plano que contém a reta que passa pelo vértice e pelo centro da base.
Um cone é equilátero quando a seção meridiana é um triângulo
equilátero. Calcule a altura de um cone equilátero de raio r.
315
Referências Bibliográficas
[1] AZAMBUJA FILHO, Z., Demonstração do Teorema de Euler para
Poliedros Convexos, Revista do Professor de Matemática no 3, 15-17,
1983.
[2] GERÔNIMO, J. R., FRANCO, V. S. Fundamentos de Matemática –
Lógica, Teoria de Conjuntos e Funções, EDUEM, Maringá-PR, 2006.
[3] HILBERT, D., Fundamentos da Geometria, Instituto para a Alta
Cultura, Lisboa, 1957.
[4] LIMA, E. L, Ainda Sobre o Teorema de Euler para Poliedros
Convexos, Revista do Professor de Matemática no 5, 23-27, 1984.
[5] LIMA, E. L, Conceitos e controvérsias, Revista do Professor de
Matemática no 8, 13-14, 1986.
[6] POGORELOV, A. Geometry, Editora Mir, Moscou, 1987.
[7] SÍTIO NA INTERNET:
http://www-history.mcs.st-and.ac.uk/history/BiogIndex.html
em 15/02/2006).
(acesso
[8] SÍTIO NA INTERNET:
http://www.ilt.kharkov.ua/bvi/personnel/pogorelov_e.html
em 15/02/2006).
(acesso
[9] SÍTIO NA INTERNET: www.euclides.org (acesso em 15/02/2006).
[10] SÍTIO NA INTERNET:
http://aleph0.clarku.edu/~djoyce/java/elements/elements.html (acesso
em 15/02/2006).
Referências Bibliográficas
[11] WATANABE, R. G., Seno de 30 é um meio?, Revista do Professor de
Matemática no 30, 26-32, 1996.
317
Apêndice A: O Livro “Os Elementos” de
Euclides
Depois da Bíblia a obra “Os Elementos” de Euclides foi o mais
editado do mundo. Esta obra é constituída de 13 livros e, em cada livro
Euclides utiliza, de forma inovadora para a época, o método dedutivo
que foi modelo de inspiração para diversas pessoas das mais diversas
áreas como, por exemplo, a obra “Principia” do físico Sir Isaac
Newton e a obra “Ética” do filósofo Spinoza.
Este método consiste na escolha de um certo número de
conceitos não definidos e um certo número de propriedades não
demonstradas e que, a partir destas, obtém-se todos os outros
conceitos e propriedades. No caso de “Os Elementos”, Euclides
desenvolveu o texto com as seguintes noções:
- Noções comuns: são aquelas que ele julgava aceitas por todas as
pessoas de bom senso. Atualmente elas são denominadas axiomas.
- Postulados: Estes são hipóteses próprias da geometria e que não
necessitassem de demonstração. Para Euclides, a diferença entre
noções comuns e postulados é que este último se referia
exclusivamente à geometria. Atualmente também o denominamos
axiomas.
- Definições: Estas possuem o mesmo sentido que temos hoje, a
diferença está que Eulides tentou definir tudo, o que é um erro pois
sempre existirão conceitos não definíveis que atualmente
denominamos noções primitivas.
- Proposições: Estas também possuem o mesmo sentido que temos
hoje. Não há muita diferença do que fazemos hoje com exceção de
dar nomes diferentes a certas proposições. De fato, temos os
seguintes nomes comumente utilizados, além de proposição: lema,
corolário e teorema. Tais nomes têm o objetivo de separar resultados
mais relevantes de resultados que constituem suporte ou são
conseqüências destes.
A obra “Os Elementos” possui no total 465 proposições, 131
definições, 5 postulados e 5 noções comuns.
Geometria Plana e Espacial
J. R. Gerônimo/V. S. Franco
Os livros de I a VI tratam de Geometria Plana Elementar, os
livros VII a IX tratam da teoria dos números. O livro X trata dos
números incomensuráveis e os livros XII a XIII tratam da Geometria
Espacial.
O livro I têm 23 definições, 5 postulados, 5 noções comuns e
48 proposições. As proposições estão assim distribuídas:
As proposições de 1 a 26 tratam de triângulos e
congruência;
as proposições de 27 a 32 tratam de retas paralelas;
as proposições 33 a 46 tratam de paralelogramos,
triângulos e quadriláteros;
as proposições 47 e 48 tratam do Teorema de Pitágoras e
seu recíproco.
O livro II têm 2 definições e 14 proposições envolvendo
transformações de áreas e álgebra geométrica. São estabelecidas
equivalências geométricas de diferentes identidades algébricas e uma
generalização do Teorema de Pitágoras conhecida como lei dos
cossenos.
O livro III têm 11 definições e 37 proposições. Este livro trata de
resultados relativos a circunferências, cordas, tangentes e medição de
ângulos.
O livro IV têm 7 definições e 16 proposições que contemplam
as construções com régua e compasso de polígonos regulares de 3, 4,
5, 6 e 15 lados.
O livro V têm 18 definições e 25 proposições e contém uma
exposição magistral da teoria das proporções aplicada aos
comensuráveis e incomensuráveis. Neste livro consta o Teorema de
Eudoxo que, erroneamente é atribuído a Arquimedes e denominado
Princípio de Arquimedes.
O livro VI têm 4 definições e 33 proposições e contém a teoria
de Eudoxus das proporções aplicadas a geometria plana. São
estabelecidos os teoremas fundamentais sobre triângulos
semelhantes e construções de terceira e quarta proporcional e média
geométrica. São estabelecidos também uma solução geométrica de
equações quádricas e o resultado em que a bissetriz de um ângulo
interno de um triângulo divide o lado oposto em segmentos
proporcionais aos outros dois lados.
320
Apêndice A: O Livro “Os Elementos” de Euclides
O livro VII têm 22 definições e 39 proposições que, junto com
os livros VIII e IX, trata agora em teoria de números. Ele muda a
estrutura que vinha sendo trabalhada nos volumes anteriores pois
acumula todas as definições neste livro. Um dos principais resultados
apresentados neste livro é o algoritmo de Euclides.
O livro VIII têm 27 proposições que se ocupa de séries de
números de proporções contínuas e de progressões geométricas.
O livro IX têm 36 proposições tratando de Teoria de Números.
Entre os principais resultados estão o Teorema Fundamental da
Aritmética e a infinitude dos números primos.
O livro X têm 16 definições e 115 proposições tratando dos
números irracionais. As definições e proposições estão divididas em 3
partes. Acredita-se que grande parte deste livro corresponde ao
trabalho de Theaetetus54 que Euclides completou, ordenou e finalizou.
Os livros XI, XII e XIII possuem 28 definições e 75 proposições
formando uma espécie de trilogia a respeito da Geometria Espacial.
Este livro inclui os estudo dos cinco poliedros regulares conhecidos
como Sólidos de Platão.
Muitas informações sobre a obra de Euclides podem ser
obtidas na internet, em particular, em [9] e [10].
54
Theaetetus de Atenas nasceu aproximadamente em 417 a.C. e morreu
aproximadamente em 369 a.C. em Atenas, Grécia. A maioria do que sabemos da vida dele vem
dos trabalhos de Platão. Foi astrónomo, filósofo e discípulo de Sócrates sendo o primeiro para
construir os cinco sólidos de Platão.
321
Apêndice B: Resolução dos Exercícios
A resolução dos exercícios propostos estão disponíveis na
página da Internet no seguinte endereço:
www.dma.uem.br/jrgeronimo/geometria.
É possível fazer o download do arquivo no formato PDF, que
pode ser lido com o programa Acrobat Reader. Com isto, o livro
possui uma quantidade menor de papel e o leitor não terá um acesso
imediato à resolução dos exercícios.
Mesmo assim, se você imprimir o arquivo, é importante que
olhe para a resolução somente após ter tentado resolvê-los. De fato,
para que ocorra a aprendizagem é importante que tente fazer sozinho
os exercícios. Utilize estas resoluções apenas como uma maneira de
ter certeza de que sua solução está correta. Se mesmo após a
conferência da resolução houver alguma dúvida procure a ajuda do
professor pois muitos exercícios podem ter outras formas de
resolução.
Estão disponibilizados também em formato PDF todos os
desenhos utilizados no livro.
Índice Remissivo
Índice Remissivo
A
alfabeto grego
maiúsculo, 6
minúsculo, 37
anel circular, 150
área, 150
ângulo, 35
agudo, 48
bissetriz, 44
central, 130
cossecante de um, 170
cosseno de um, 156
cotangente de um, 170
diedro, 230
divisão de, 37
entre planos, 211, 226
entre reta e plano, 228
entre retas, 182
externo de um triângulo, 54
grau, 41
inscrito, 131
arco correspondente, 131
interno de polígono, 100
interno de um triângulo, 54
lado, 35
medida, 36
obtuso, 48
raso, 35
reto, 43
secante de um, 170
seno de um, 156
subtendendo arco, 131
suplemento, 42
tangente de um, 156
transferidor, 41
triedro, 233
vértice, 35
ângulos
alternos internos, 78
colaterais internos, 78
complementares, 48
congruentes, 41
consecutivos, 40
323
correspondentes, 78
opostos pelo vértice, 42
suplementares, 42
apótema
polígono, 138
arco
maior, 130
medida, 130
menor, 130
arcos
determinados por dois pontos, 130
área, 103
círculo, 149
paralelogramo, 106
quadrado, 103
retângulo, 103
trapézio, 105
triângulo, 104
união de regiões planas, 103
Arquimedes, 3, 141
axioma, 1, 3, 5
completamento, 141
congruência, 51, 103
das paralelas, 76
determinação, 7
determinação no espaço, 172
existência, 7
existência de segmento, 28
existência no espaço, 172
incidência, 172
inclusão, 173
medida
ângulo, 36, 38
área, 103
segmento, 27
volume, 279
ordem, 10
ordem no espaço, 179
Princípio de Cavalieri, 280
B
baricentro, 153
bissetriz, 44
construção, 61
Geometria Plana e Espacial
Bolyai, 2
C
calota esférica, 274
área, 295
casca
cilíndrica, 287
volume médio, 287
cônica, 290
casca esférica, 295
catetos, 65
Cavalieri, 280
centro
polígono, 138
cilindro, 196
altura, 222
área da superfície lateral, 287
área total da superfície cilíndrica,
287
base, 196
circunscrito, 277
geratriz, 196
inscrito, 277
reto, 210
superfície lateral, 196
volume, 286
círculo, 34
área, 149
exterior, 34
interior, 34
círculos máximos
perpendiculares, 276
circuncentro, 134
circunferência, 34
comprimento, 145
concêntricas, 125
corda, 125
diâmetro, 84, 125
perímetro, 145
raio, 125
secante, 125
tangente, 127
circunferências
tangentes, 128
externas, 128
internas, 128
comprimento, 29
324
J. R. Gerônimo/V. S. Franco
metro, 29
cone, 176
altura, 221
área lateral, 290
área total, 290
base, 176
equilátero, 299
geratriz, 176
reto, 208
revolução, 208
seção meridiana, 299
superfície lateral, 176
tronco, 299
vértice, 176
volume médio, 290
conjunto
convexo, 25
ilimitado, 75
limitado, 75
construção
bissetriz, 61
ponto médio, 72
coordenada, 30, 31
coroa circular, 150
área, 150
corolário, 5
corpo arquimediano, 141
cossecante de um ângulo, 170
cosseno de um ângulo, 156
cotangente de um ângulo, 170
cubo, 209
cubo-octraedro, 263
cunha esférica, 274
volume, 292
D
Dedekind, 3
definição, 5
desigualdade triangular, 70
diâmetro
medida, 126
diedro, 229
agudo, 230
aresta, 229
bissetor, 244
face, 229
medida, 230
Índice Remissivo
obtuso, 230
reto, 230
seção, 229
diedros
complementares, 244
congruentes, 230
opostos pela aresta, 245
suplementares, 244
disco, 34
distância
de ponto a plano, 220
entre dois pontos, 27
entre retas reversas, 225
ponto a reta, 68
divina proporção, 110
vértice, 247
prismática, 195
função
cossecante, 170
cosseno, 156
cotangente, 170
secante, 170
seno, 156
tangente, 156
fuso esférico, 273
área, 295
G
Garfield, 112
E
elipse, 47
esfera, 266
congruência, 266
cunha, 274
fuso, 273
setor de duas bases, 274
volume de uma, 291
zona, 274
esferas
exteriores, 272
interiores, 272
secantes, 272
tangentes exteriormente, 272
tangentes interiormente, 272
Euclides, 1
F
feixe de planos
paralelos, 197
reta transversal, 197
segmentos correspondentes, 197
figura
geométrica
espacial, 6, 246
plana, 6
piramidal, 175
poliédrica, 246
aresta, 247
325
H
hexaedro, 180
Hilbert, 3
hipotenusa, 65
I
incentro, 135
interseção entre duas retas, 8
L
lei dos cossenos, 164
lei dos senos, 166
lema, 5
Lobachewsky, 2
losango, 87
lugar geométrico, 35
M
média geométrica, 122
mediatriz, 44
medida
ângulo, 36
segmento
comprimento, 27
unidade, 27
Geometria Plana e Espacial
metro, 28, 29
N
n-ágono, 21
noção primitiva, 5
estar entre, 9
fronteira, 97, 246
interior, 97, 246
plano, 5
ponto, 5
região plana, 97
reta, 5
sólido geométrico, 246
número
áureo, 110
de ouro, 110
O
octaedro
regular, 210
ortocentro, 153
ortoedro, 209
P
par de classes vizinhas, 144
paralelepípedo, 180, 195, 209
retângulo, 209
reto, 209
reto-retângulo, 209
paralelismo
entre planos, 190
entre retas, 189
entre retas e planos, 188
paralelogramo, 84
área, 106
Pasch, M., 24
pé da perpendicular, 68
perímetro
polígono, 35
Pi, 146
pirâmide, 175
altura, 221
área
326
J. R. Gerônimo/V. S. Franco
lateral, 283
total, 283
arestas, 175
arestas laterais, 175
base, 175
faces, 175
figura piramidal, 175
hexagonal, 175
quadrangular, 175
regular, 208
semelhança, 197
superfície
lateral, 175
piramidal, 175
total, 175
tetraedro, 175
triangular, 175
tronco, 298
vértices, 175
Pitágoras, 1, 107
plano mediador, 219
planos, 6
paralelos, 190
perpendiculares, 211
Pogorelov, 4
poliedro, 249
convexo, 249
cubo-octraedro, 263
Euleriano, 255
interior, 249
tetra-hexágono, 264
poliedro de Platão, 256
poliedro regular, 260
poliedros
congruentes, 250
poligonal, 21
lados, 21
vértices, 21
polígono, 21
ângulo interno, 100
apótema, 138
centro do, 138
circunscrito, 134
convexo, 100
inscrito, 134
perímetro, 35
plano, 174
regular, 111
reverso, 174
Índice Remissivo
ponto
coordenada, 30
de contato, 127
de tangência, 127
médio, 33
ponto médio
construção, 72
pontos, 6
colineares, 8
de um segmento AB, 9
do mesmo lado, 11
do mesmo lado em relação a reta, 14
do mesmo lado em relação a um
plano, 179
em lados diferentes, 11
preceder, 18
postulado, 1
postulados
de Euclides, 1
potência de ponto, 132
Princípio de Cavalieri, 280
prisma, 195
altura, 222
aresta, 195
aresta lateral, 195
base, 195
diagonais, 195
face lateral, 195
hexagonal, 195
oblíquo, 208
quadrangular, 195
regular, 208
reto, 208
seção, 195
superfície
área lateral, 281
área total, 281
superfície lateral, 196
triangular, 195
vértice, 195
Proclus, 2
projeção de um segmento, 68
projeção ortogonal
figura, 217
ponto, 217
proporção, 114
proposição, 5
327
Q
quadrado, 87
área, 103
quadrilátero, 16
ângulos consecutivos, 84
ângulos opostos, 84
diagonal, 84
lado, 16
lados consecutivos, 84
lados opostos, 84
reverso, 174
vértice, 16
R
radiano, 147
raio
extremidade final, 125
medida, 126
razão, 114
áurea, 110
de semelhança, 118, 197, 199
razões trigonométricas, 155
região
plana, 97
fronteira, 97
interior, 97
ponto fronteira, 97
ponto interior, 97
poligonal, 101
fronteira, 101
interior, 101
triangular, 98
exterior, 100
fronteira, 98
interior, 98
relação
de ordem, 19
estrita, 19
total, 19
relação fundamental, 157
reta
concorrente com plano, 174
paralela a um plano, 174
perpendicular a plano, 203
secante com plano, 174
Geometria Plana e Espacial
sistema de coordenadas, 31
suporte, 9
transversal, 77
retângulo, 87
área, 103
áureo, 108
retas, 6
concorrentes, 177
paralelas, 64
paralelas no espaço, 178
perpendiculares, 43, 182
reversas, 178
rombo, 87
romboedro, 209
oblíquo, 209
reto, 209
S
secante de um ângulo, 170
seção
de um triedro, 235
normal, 229
reta, 229
seções
igualmente inclinadas, 231
segmento, 9
comprimento, 27
segmento circular, 150
área, 150
segmento esférico, 274
segmentos
congruentes, 41
consecutivos, 21
de reta, 9
extremos, 9
ponto interior, 9
semi-circunferência, 130
semi-espaço, 179
semiplano, 15
semi-reta, 13
negativa, 18
origem, 13
positiva, 18
primeira, 18
segunda, 18
seno de um ângulo, 156
seqüências proporcionais, 114, 115
328
J. R. Gerônimo/V. S. Franco
setor circular, 150
setor esférico, 274
volume, 292
setor esférico de duas bases
volume, 293
sólidos geométricos
semelhança, 298
superfície
cilíndrica, 196
cônica, 176
piramidal, 175
poliédrica, 248
aberta, 248
contorno, 248
convexa, 249
face, 248
fechada, 248
prismática, 195
superfície esférica, 266
área, 295
calota, 274
centro, 266
circunferência máxima, 270
congruência, 266
corda, 267
diâmetro, 267
distância polar, 267
eixo, 267
equador, 267
paralelo, 267
pólos, 267
fuso, 273
vértices, 273
meridiano, 267
plano diametral, 270
plano exterior, 269
plano secante, 269
plano tangente, 269
pontos exteriores, 267
pontos interiores, 267
raio, 267
reta exterior, 271
reta secante, 271
reta tangente, 271
seções, 267
segmento, 274
setor, 274
Índice Remissivo
T
Tales, 1, 114
tangente de um ângulo, 156
teorema, 5
da bissetriz
externa, 123
interna, 117
das três perpendiculares, 214, 223
de Euler, 251
de Pitágoras, 107
de Tales, 117
de Tales para planos, 197
do ângulo externo, 54
tetraedro, 175
regular, 208
tetra-hexágono, 264
traço da perpendicular, 203
transferidor, 41
trapézio, 84
altura, 84
área, 105
base, 84
isósceles, 84
lateral, 84
retângulo, 84
triângulo, 9
acutângulo, 65
altura, 53
ângulo oposto a lado, 54
área, 104
eqüilátero, 47
escaleno, 47
interior, 25
isósceles, 47
base, 47
laterais, 47
lado, 10
mediana, 53
obtusângulo, 65
retângulo, 65
329
vértice, 10
triângulos
congruência, 49
axioma, 51
caso ALA, 56
caso LAAo, 61
caso LAL, 51
caso LLA, 66
caso LLL, 59
semelhança, 118
triedro, 233
aresta, 233
autopolar, 237
face, 233
polar, 237
tri-retangular, 234
tri-retângulo, 234
vértice, 233
triedros
congruência, 236
caso DDD, 242
caso DFD, 241
caso FDF, 241
caso FFF, 241
trigonometria, 155
tronco de pirâmide, 197
U
unidade de medida, 27
V
volume, 279
Z
zona esférica, 274