Processador
Fluxo de Dados e Controle
1998 Morgan Kaufmann Publishers
1
O processador: Fluxo de Dados & Controle
•
•
Estamos prontos para realizarmos uma implementação do MIPS
Simplificada para conter somente:
– Instruções de referência à memória: lw, sw
– Instruções aritméticas e lógicas: add, sub, and, or, slt
– Instruções de fluxo de controle: beq, j
•
Implementação genérica:
– usar o contador de programa (PC) para fornecer o endereço da
instrução
– Ler a instrução da memória
– ler registradores
– Usar a instrução para decidir exatamente o que fazer
•
Todas as instruções usam a ALU após a leitura dos registradores
Por que? Referência a memória?Aritmética? Fluxo de
controle?
1998 Morgan Kaufmann Publishers
2
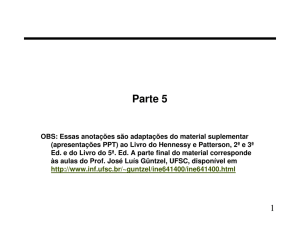
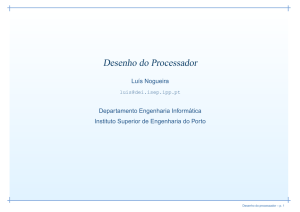
Mais detalhes sobre a Implementação
•
Resumo / Vista Simplificada:
Data
Register #
PC
Address
Instruction
memory
Instruction
Registers
ALU
Address
Register #
Data
memory
Register #
Data
Dois tipos de unidades funcionais:
– Elementos que operam sobre dados (combinacional)
– Elementos que contêm estado (sequencial)
1998 Morgan Kaufmann Publishers
3
Elementos de Estado
•
•
Sem clock vs. com clock
Clocks são usados em lógica síncrona
– como um elemento que contem estado pode ser atualizado?
Borda de descida
Tempo de ciclo
Borda de subida
1998 Morgan Kaufmann Publishers
4
preliminares
Número ímpar de inversores em anel
Número par de inversores em anel
1998 Morgan Kaufmann Publishers
5
Um elemento de estado sem clock
•
O retentor (latch) set-reset
– A saída depende das entradas atuais e também das entradas
passadas
R
Q
S
R
Q
S
Q
S
Q
R
Q
1998 Morgan Kaufmann Publishers
6
Latch D e Flip-flop D
•
A saída é igual ao valor armazenado no elemento
(não é necessário pedir permissão para ver o valor)
•
A mudança de estado (valor) é baseada no clock
•
Latch D: sempre que as entradas mudam, e o clock é acionado
•
Flip-flop D: o estado muda somente na borda do clock
(edge-triggered)
1998 Morgan Kaufmann Publishers
7
Latch D
•
Duas entradas:
– O valor do dado a ser armazenado (D)
– O sinal de clock (C) indicando quando ler & escrever D
Duas saídas:
– O valor do estado interno (Q) e o seu complemento
•
C
Q
D
_
Q
C
D
Q
D
Q
C
Q
1998 Morgan Kaufmann Publishers
8
flip-flop D
•
A saída somente muda na borda do clock
D
D
C
D
latch
Q
D
Q
D
latch _
C
Q
Q
D
_
Q
C
C
Q
D
Q
C
Q
1998 Morgan Kaufmann Publishers
9
Nossa Implementação
•
•
Uma metodologia usando borda para o disparo ( “trigger”)
Execução típica:
– Ler conteúdo de certos elementos de estado,
– Enviar valores através de alguma lógica combinacional
– Escrever resultados a um ou mais elementos de estado
State
element
1
Combinational logic
State
element
2
Clock cycle
1998 Morgan Kaufmann Publishers
10
Banco de Registradores (Register file)
•
Construido usando D flip-flops
Read register
number 1
Read register
number 1
Register 0
Register 1
Register n – 1
M
u
x
Read data 1
Read
data 1
Read register
number 2
Register file
Write
register
Register n
Read register
number 2
Write
data
M
u
x
Read
data 2
Write
Read data 2
1998 Morgan Kaufmann Publishers
11
Banco de Registradores
•
Nota: ainda usamos o clock real para determinar quando escrever
Write
0
Register number
C
Register 0
1
D
n-to-1
decoder
C
n– 1
Register 1
D
n
C
Register n – 1
D
C
Register n
Register data
D
1998 Morgan Kaufmann Publishers
12
Implementação simples
•
Inclui as unidades funcionais que necessitamos para as instruções
Instruction
address
PC
Instruction
Add Sum
MemWrite
Instruction
memory
Address
a. Instruction memory
5
Register
numbers
5
5
Data
b. Program counter
Write
data
3
Read
register 1
Read
register 2
Registers
Write
register
Write
data
c. Adder
ALU control
Read
data 1
Read
data
Data
memory
Sign
extend
32
MemRead
a. Data memory unit
Data
16
b. Sign-extension unit
Zero
ALU ALU
result
Read
data 2
RegWrite
a. Registers
b. ALU
1998 Morgan Kaufmann Publishers
13
multiplexador
•
Seleciona uma das entradas para a saída, baseado numa entrada de
controle
S
A
0
B
1
mux de 2-entradas A e B
e controle S
C
S
S
2
A
B
C
D
2
0
1
2
3
C
A
B
C
D
01
10
10
C
mux de 4 entradas
11
1998 Morgan Kaufmann Publishers
14
ALU
Operando A
Flag de resultado zero
resultado
Operando B
1998 Morgan Kaufmann Publishers
15
ALU de 32 bits
Bnegate
Operation
Seleção
a0
b0
CarryIn
ALU0
Less
CarryOut
Result0
a1
b1
0
CarryIn
ALU1
Less
CarryOut
Result1
a2
b2
0
CarryIn
ALU2
Less
CarryOut
Result2
a31
b31
0
CarryIn
ALU31
Less
a
ALU
32
result
32
b
Zero
32
Linhas de controle:
000
001
010
110
111
=
=
=
=
=
and
or
add
subtract
slt
Result31
Set
Overflow
1998 Morgan Kaufmann Publishers
16
Convertendo um número de n bits em números de mais de n bits
Um dado imediato de 16 bits do MIPS é
convertido para 32 bits em aritmética
Copiar o bit mais significativo (o bit de
sinal) para outros bits
0010 -> 0000 0010
1010 -> 1111 1010
"sign extension"
1998 Morgan Kaufmann Publishers
17
Memória de instruções
endereço
de 32 bits
pelo PC
instrução
de 32 bits
1998 Morgan Kaufmann Publishers
18
Memória de dados
Para leitura: deve fornecer
o endereço (Address) e acionar o
controle de leitura (MemRead=1)
Para escrita deve fornecer o
endereço (Address), o dado
a ser escrito no (Writedata) e
acionar o controle de escrita
(MemWrite=1)
1998 Morgan Kaufmann Publishers
19
Contador de programa
endereço da
próxima
de instrução
endereço da instrução
corrente
Quando é sequencial é o endereço da instrução corrente
adicionado de 4 (memória de instruções constituída
de bytes)
1998 Morgan Kaufmann Publishers
20
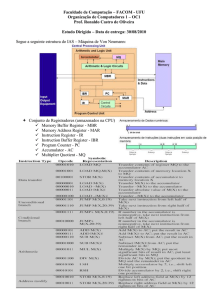
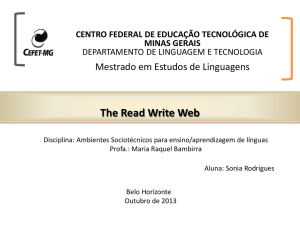
Construindo o Fluxo de Dados
•
Usar os multiplexadores para juntar os elementos
PCSrc
M
u
x
Add
Add ALU
result
4
Shift
left 2
PC
Read
address
Instruction
Instruction
memory
Registers
Read
register 1
Read
Read
data 1
register 2
Write
register
Write
data
RegWrite
16
ALUSrc
Read
data 2
Sign
extend
M
u
x
3
ALU operation
Zero
ALU ALU
result
MemWrite
MemtoReg
Address
Read
data
Data
memory
Write
data
M
u
x
32
MemRead
1998 Morgan Kaufmann Publishers
21
Controle
•
Selecionar as operações para executar (ALU, leitura/escrita, etc.)
•
Controlar o fluxo de dados (entradas para o multiplexador)
•
A informação vem de 32 bits da instrução
•
Exemplo:
add $8, $17, $18
•
Formato de Instrução:
000000
10001
10010
01000
op
rs
rt
rd
00000 100000
shamt
funct
Operação da ALU baseada no tipo de instrução e código da função
1998 Morgan Kaufmann Publishers
22
Controle
•
•
•
P.ex., o que a ALU faz para essa instrução
Example: lw $1, 100($2)
35
2
1
op
rs
rt
16 bit offset
Entrada de controle da ALU
000
001
010
110
111
•
100
AND
OR
add
subtract
set-on-less-than
Por que o código da subtração é 110 e não 011?
1998 Morgan Kaufmann Publishers
23
Controle
•
Deve descrever o hardware para computar a entrada de controle da
ALU de 3-bit
– Dado o tipo de instrução
00 = lw, sw
ALUOp
01 = beq,
Computado do tipo de instrução
10 = aritmética
– Código de função para aritmética
•
Descreve usando uma tabela verdade (que pode ser convertido em
ALUOp
Funct field
Operation
portas):
ALUOp1 ALUOp0 F5 F4
0
0
X X
0
1
X X
1
0
X X
1
0
X X
1
0
X X
1
0
X X
1
0
X X
F3
X
X
0
0
0
0
1
F2
X
X
0
0
1
1
0
F1
X
X
0
1
0
0
1
F0
X
X
0
0
0
1
0
010
110
010
110
000
001
111
1998 Morgan Kaufmann Publishers
24
Controle
0
M
u
x
Add
Add
4
Instruction [31– 26]
Control
Instruction [25– 21]
PC
Read
address
Instruction
memory
Instruction [15– 11]
1
Shift
left 2
RegDst
Branch
MemRead
MemtoReg
ALUOp
MemWrite
ALUSrc
RegWrite
Read
register 1
Instruction [20– 16]
Instruction
[31– 0]
ALU
result
0
M
u
x
1
Read
data 1
Read
register 2
Registers Read
Write
data 2
register
0
M
u
x
1
Write
data
Zero
ALU ALU
result
Address
Write
data
Instruction [15– 0]
16
Sign
extend
Read
data
Data
memory
1
M
u
x
0
32
ALU
control
Instruction [5– 0]
Memto- Reg Mem Mem
Instruction RegDst ALUSrc
Reg
Write Read Write Branch ALUOp1 ALUp0
R-format
1
0
0
1
0
0
0
1
0
lw
0
1
1
1
1
0
0
0
0
sw
X
1
X
0
0
1
0
0
0
beq
X
0
X
0
0
0
1
0
1
1998 Morgan Kaufmann Publishers
25
Controle
•
Lógica combinacional simples (tabela verdade)
Inputs
Op5
Op4
Op3
Op2
ALUOp
Op1
ALU control block
Op0
ALUOp0
ALUOp1
Outputs
F3
F2
F (5– 0)
Operation2
Operation1
Operation
Iw
sw
beq
RegDst
ALUSrc
MemtoReg
F1
Operation0
F0
R-format
RegWrite
MemRead
MemWrite
Branch
ALUOp1
ALUOpO
1998 Morgan Kaufmann Publishers
26
Nossa estrutura de controle simples
•
Todas as lógicas são combinacionais
•
Esperamos estabilizar tudo, e a operação certa a ser realizada
– ALU não produz resposta certa imediatamente
– Usamos os sinais de escrita sincronizados ao clock para
determinar quando escrever
•
O tempo de ciclo é determinado pelo circuito mais moroso
State
element
1
Combinational logic
State
element
2
Clock cycle
1998 Morgan Kaufmann Publishers
27
Implementação em um ciclo
•
Calcular o tempo de ciclo assumindo atrasos desprezíveis exceto:
– Memória (2ns), ALU e somadores (2ns), acesso aos registradores
(1ns)
PCSrc
Add
ALU
Add result
4
RegWrite
Instruction [25– 21]
PC
Read
address
Instruction
[31– 0]
Instruction
memory
Instruction [20– 16]
1
M
u
Instruction [15– 11] x
0
RegDst
Instruction [15– 0]
Read
register 1
Read
register 2
Read
data 1
Read
Write
data 2
register
Write
Registers
data
16
Sign 32
extend
1
M
u
x
0
Shift
left 2
MemWrite
ALUSrc
1
M
u
x
0
ALU
control
Zero
ALU ALU
result
MemtoReg
Address
Read
data
Data
Write
memory
data
1
M
u
x
0
MemRead
Instruction [5– 0]
ALUOp
1998 Morgan Kaufmann Publishers
28
Implementação de MIPS em um único ciclo
0
M
u
x
Add
Add
4
Instruction [31– 26]
Control
Instruction [25– 21]
PC
Read
address
Instruction
memory
Instruction [15– 11]
1
Shift
left 2
RegDst
Branch
MemRead
MemtoReg
ALUOp
MemWrite
ALUSrc
RegWrite
Read
register 1
Instruction [20– 16]
Instruction
[31– 0]
ALU
result
0
M
u
x
1
Read
data 1
Read
register 2
Registers Read
Write
data 2
register
0
M
u
x
1
Write
data
Zero
ALU ALU
result
Address
Write
data
Instruction [15– 0]
16
Sign
extend
Read
data
Data
memory
1
M
u
x
0
32
ALU
control
Instruction [5– 0]
Instruction
R-format
lw
sw
beq
RegDst
1
0
X
X
ALUSrc
0
1
1
0
Memto- Reg Mem Mem
Reg
Write Read Write
0
1
0
0
1
1
1
0
X
0
0
1
X
0
0
0
Branch
0
0
0
1
ALUOp1 ALUp0
1
0
0
0
01998 Morgan0Kaufmann Publishers
0
1
29
Onde estamos?
•
•
Problemas de ciclo simples:
– E se tivéssemos instruções mais complexas como pontoflutuante?
– Devastação de área
Uma Solução:
– usar um tempo de ciclo “menor”
– Ter diferentes instruções levando diferentes números de ciclos
– Um fluxo de dados de “multiplos ciclos”:
Instruction
register
PC
Address
Data
A
Memory
Data
Register #
Instruction
or data
Memory
data
register
ALU
Registers
Register #
ALUOut
B
Register #
1998 Morgan Kaufmann Publishers
30
Técnica Multiciclo
•
•
•
Estaremos usando as mesmas unidades funcionais
– ALU é usada para computar o endereço e para incrementar PC
– A memória é usada para instruções e dados
Nossos sinais de controle não são determinados somente pelas
instruções
– P.ex., o que a ALU faria para uma instrução de “subtração” ?
Usamos uma máquina de estado finito para o controle
1998 Morgan Kaufmann Publishers
31
Revisão: máquinas de estado finito
•
Máquinas de estado finito:
– Um conjunto de estados e
– Função próximo estado (determinado pelo estado atual e
entrada)
– Função de saída (determinada pelo estado atual e possivelmente
entrada)
Current state
Next-state
function
Next
state
Clock
Inputs
Output
function
Outputs
– Usaremos uma máquina Moore (saída baseada somente no
estado atual)
1998 Morgan Kaufmann Publishers
32
Revisão: máquinas de estado finito
•
Exemplo:
B. 21 Um amigo gostaria de construir um olho “eletrônico” para uso em dispositivo de
segurança. O dispositivo consiste de 3 luzes alinhados, controladas por saídas Esquerda,
Central, e Direita, que, se acionadas, indicam que uma luz estaria acesa. Somente uma
luz é acionada por vez, e a luz “move” da esquerda para a direita e, então, da direita para
a esquerda, para assustar os ladrões que acreditam que os dispositivos estejam
monitorando as suas atividades. Traçar a representação gráfica para a máquina de estado
finito usada para especificar o olho eletrônico. Notar que a taxa de movimentação do
olho será controlado pela velocidade do clock (que não deveria ser excessivamente
grande) e que não existem essencialmente entradas.
1998 Morgan Kaufmann Publishers
33
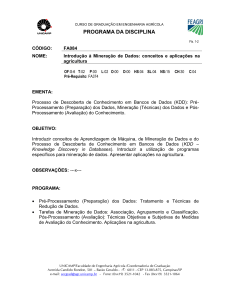
Técnica multiciclo
•
•
Quebrar as instruções em passos, cada passo leva um ciclo
– Balancear a quantidade de trabalhos a realizar
– Restringir cada ciclo para usar somente uma unidade funcional
No fim de um ciclo
– Armazenar valores para serem usados nos ciclos posteriores
– introduzir registradores internos adicionais
PC
0
M
u
x
1
Instruction
[25– 21]
Address
Memory
MemData
Write
data
Read
Read
register 2 data 1
Registers
Write
Read
register data 2
Instruction
[20– 16]
Instruction
[15– 0]
Instruction
register
Instruction
[15– 0]
Memory
data
register
0
M
u
x
1
Read
register 1
0
M
Instruction u
x
[15– 11]
1
A
B
0
M
u
x
1
16
Sign
extend
32
ALUOut
0
4
Write
data
Zero
ALU ALU
result
1 M
u
2 x
3
Shift
left 2
1998 Morgan Kaufmann Publishers
34
Cinco passos de Execução
•
Busca da instrução (Instruction Fetch)
•
Decodificação da instrução e busca do registrador
•
Execução, Computação do endereço de memória, ou conclusão de
uma instrução de branch
•
Acesso à memória ou conclusão de uma instrução R-type
•
Passo de Write-back
INSTRUÇÕES LEVEM DE 3 - 5 CICLOS!
1998 Morgan Kaufmann Publishers
35
Passo 1: Busca da instrução (Instruction Fetch)
•
•
•
Usar o PC para a leitura da instrução e carga da mesma no registrador
de instrução (Instruction Register).
Incrementar o valor do PC por 4 e carregar o resultado no PC.
Pode ser descrito sucintamente usando RTL "Register-Transfer
Language"
IR = Memory[PC];
PC = PC + 4;
Podemos obter os valores dos sinais de controle?
Quais as vantagens de atualizar o PC neste passo?
1998 Morgan Kaufmann Publishers
36
Passo 2: Decod. da Instrução e Busca de Registradores
•
•
•
Leitura dos registradores rs e rt
Computar o endereço de branch no caso da instrução de branch
RTL:
A = Reg[IR[25-21]];
B = Reg[IR[20-16]];
ALUOut = PC + (sign-extend(IR[15-0]) << 2);
•
Estamos acionando as linhas de controle baseadas no tipo de
instrução
(a instrução está sendo "decodificada" na lógica de controle)
1998 Morgan Kaufmann Publishers
37
Passo 3 (dependente da instrução)
•
ALU está realizando uma das três funções, baseadas no tipo de
instrução
•
Referência à memória:
ALUOut = A + sign-extend(IR[15-0]);
•
R-type:
ALUOut = A op B;
•
Branch:
if (A==B) PC = ALUOut;
1998 Morgan Kaufmann Publishers
38
Passo 4 (R-type ou acesso à memória)
•
Acesso à memória através de loads e stores
MDR = Memory[ALUOut];
or
Memory[ALUOut] = B;
•
Fim das instruções R-type
Reg[IR[15-11]] = ALUOut;
A escrita é realizada no fim do ciclo, na borda
1998 Morgan Kaufmann Publishers
39
Passo Write-back
• Reg[IR[20-16]]= MDR;
E as outras instruções?
1998 Morgan Kaufmann Publishers
40
Resumo:
Step name
Instruction fetch
Action for R-type
instructions
Instruction
decode/register fetch
Action for memory-reference
Action for
instructions
branches
IR = Memory[PC]
PC = PC + 4
A = Reg [IR[25-21]]
B = Reg [IR[20-16]]
ALUOut = PC + (sign-extend (IR[15-0]) << 2)
Execution, address
computation, branch/
jump completion
ALUOut = A op B
ALUOut = A + sign-extend
(IR[15-0])
Memory access or R-type
completion
Reg [IR[15-11]] =
ALUOut
Load: MDR = Memory[ALUOut]
or
Store: Memory [ALUOut] = B
Memory read completion
if (A ==B) then
PC = ALUOut
Action for
jumps
PC = PC [31-28] II
(IR[25-0]<<2)
Load: Reg[IR[20-16]] = MDR
1998 Morgan Kaufmann Publishers
41
Questões simples
•
Quantos ciclos são necessários para o código?
Label:
•
•
lw $t2, 0($t3)
lw $t3, 4($t3)
beq $t2, $t3, Label
add $t5, $t2, $t3
sw $t5, 8($t3)
...
#assume not
O que acontece durante o oitavo ciclo de execução?
Em que ciclo a soma de $t2 e $t3 é realizada?
1998 Morgan Kaufmann Publishers
42
Implementando o Controle
•
Os sinais de controle são dependentes de:
– Que instrução está sendo executada
– Que passo está sendo realizada
•
Usar as informações acumuladas para especificar uma máquina de
estado finito
– Especificar uma máquina de estado finito graficamente, ou
– usar microprogramação
1998 Morgan Kaufmann Publishers
43
Especificação da FSM
Instruction decode/
register fetch
Instruction fetch
(Op
2
or
W')
= 'L
(Op
W
= 'S
Branch
completion
=
')
W
'S
MemRead
IorD = 1
R-type completion
7
5
3
MemWrite
IorD = 1
Write-back step
4
RegDst = 0
RegWrite
MemtoReg = 1
Quantos bits de estado são necessários?
'B
EQ
ALUSrcA = 1
ALUSrcB = 00
ALUOp = 01
PCWriteCond
PCSource = 01
p
Memory
access
RegDst = 1
RegWrite
MemtoReg = 0
Jump
completion
9
8
6
ALUSrcA =1
ALUSrcB = 00
ALUOp = 10
Memory
access
')
e)
-t yp
R
=
(O
(Op = 'LW')
(Op
')
Execution
ALUSrcA = 1
ALUSrcB = 10
ALUOp = 00
•
ALUSrcA = 0
ALUSrcB = 11
ALUOp = 00
(Op = 'J')
Memory address
computation
1
=
Start
MemRead
ALUSrcA = 0
IorD = 0
IRWrite
ALUSrcB = 01
ALUOp = 00
PCWrite
PCSource = 00
(O
p
0
PCWrite
PCSource = 10
Máquina de estado finito para controle
Implementação:
PCWrite
PCWriteCond
IorD
MemRead
MemWrite
IRWrite
Control logic
MemtoReg
PCSource
ALUOp
Outputs
ALUSrcB
ALUSrcA
RegWrite
RegDst
NS3
NS2
NS1
NS0
Instruction register
opcode field
S0
S1
S2
S3
Op0
Op1
Op2
Op3
Op4
Inputs
Op5
•
State register
1998 Morgan Kaufmann Publishers
45
Implementação em PLA
Op5
Op4
Op3
Op2
Op1
Op0
S3
S2
S1
S0
PCWrite
PCWriteCond
IorD
MemRead
MemWrite
IRWrite
MemtoReg
PCSource1
PCSource0
ALUOp1
ALUOp0
ALUSrcB1
ALUSrcB0
ALUSrcA
RegWrite
RegDst
NS3
NS2
NS1
NS0
1998 Morgan Kaufmann Publishers
46
Implementação em ROM
•
•
ROM = "Read Only Memory"
– Os valores das palavras de memória são fixas ao longo do tempo
Uma ROM pode ser usada para implementar uma tabela verdade
– Se o endereço é de m-bits, podemos endereçar 2m entradas na
ROM.
– Nossas saídas são os bits de dados onde o endereço aponta.
m
n
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
0
1
1
1
0
0
0
0
0
1
1
0
0
0
1
1
1
0
0
0
0
0
1
1
1
0
0
0
0
1
0
1
m é a “altura", e n é a “largura"
1998 Morgan Kaufmann Publishers
47
Implementação em ROM
•
•
•
Quantas entradas existem?
6 bits para opcode, 4 bits para estado = 10 linhas de endereço
(i.e., 210 = 1024 endereços diferentes)
Quantas saídas existem?
16 saídas de controle do fluxo de dados, 4 bits de estado = 20
saídas
ROM é 210 x 20 = 20K bits
(um tamanho não usual)
1998 Morgan Kaufmann Publishers
48
ROM vs PLA
•
Quebrar a tabela em duas partes
— 4 bits de estado fornecem as 16 saídas, 24 x 16 bits of ROM
— 10 bits fornecem o endereço para os 4 bits de estado
seguinte, 210 x 4 bits of ROM
— Total: 4.3K bits de ROM
•
PLA é menor
— pode compartilhar termos produtos
— são necessárias somente entradas que produzem saída ativa
— pode levar em conta os irrelevantes
•
O tamanho é (#entradas #termos-produto) + (#saídas #termosproduto)
Para esse exemplo = (10x17)+(20x17) = 460 células PLA
•
Células PLA são de tamanho aproximado de uma célula de ROM
(levemente maior)
1998 Morgan Kaufmann Publishers
49
Um outro estilo de Implementação
Instruções complexas: o “estado seguinte" é quase sempre o estado
atual + 1
Control unit
PLA or ROM
Outputs
Input
PCWrite
PCWriteCond
IorD
MemRead
MemWrite
IRWrite
BWrite
MemtoReg
PCSource
ALUOp
ALUSrcB
ALUSrcA
RegWrite
RegDst
AddrCtl
1
State
Adder
Address select logic
Op[5– 0]
•
Instruction register
opcode field
1998 Morgan Kaufmann Publishers
50
Detalhes
Op
000000
000010
000100
100011
101011
Dispatch ROM 1
Opcode name
R-format
jmp
beq
lw
sw
Value
0110
1001
1000
0010
0010
Dispatch ROM 2
Opcode name
lw
sw
Op
100011
101011
Value
0011
0101
PLA or ROM
1
State
Adder
3
Mux
2 1
AddrCtl
0
0
Dispatch ROM 2
Dispatch ROM 1
Op
Address select logic
Instruction register
opcode field
State number
0
1
2
3
4
5
6
7
8
9
Address-control action
Use incremented state
Use dispatch ROM 1
Use dispatch ROM 2
Use incremented state
Replace state number by 0
Replace state number by 0
Use incremented state
Replace state number by 0
Replace state number by 0
Replace state number by 0
Value of AddrCtl
3
1
2
3
0
0
3
0
0
0
1998 Morgan Kaufmann Publishers
51
Microprogramação
Control unit
Microcode memory
Outputs
Input
PCWrite
PCWriteCond
IorD
MemRead
MemWrite
IRWrite
BWrite
MemtoReg
PCSource
ALUOp
ALUSrcB
ALUSrcA
RegWrite
RegDst
AddrCtl
Datapath
1
Microprogram counter
Adder
Op[5– 0]
Address select logic
Instruction register
opcode field
•
O que são “microinstruções” ?
1998 Morgan Kaufmann Publishers
52
Microprogramação
•
Uma metodologia de especificação
– Apropriado se centenas de opcodes, modos, ciclos, etc.
– sinais especificados simbolicamente usando microinstruções
Label
Fetch
Mem1
LW2
ALU
control
Add
Add
Add
SRC1
PC
PC
A
Register
control
SRC2
4
Extshft Read
Extend
PCWrite
Memory
control
Read PC ALU
Read ALU
Write MDR
SW2
Rformat1 Func code A
Write ALU
B
Write ALU
BEQ1
JUMP1
•
•
Subt
A
B
ALUOut-cond
Jump address
Sequencing
Seq
Dispatch 1
Dispatch 2
Seq
Fetch
Fetch
Seq
Fetch
Fetch
Fetch
Duas implementações da mesma arquitetura tem o mesmo microcódigo?
O que faria um microassembler?
1998 Morgan Kaufmann Publishers
53
Formato de Microinstrução
Field name
ALU control
SRC1
SRC2
Value
Add
Subt
Func code
PC
A
B
4
Extend
Extshft
Read
ALUOp = 10
ALUSrcA = 0
ALUSrcA = 1
ALUSrcB = 00
ALUSrcB = 01
ALUSrcB = 10
ALUSrcB = 11
Write ALU
RegWrite,
RegDst = 1,
MemtoReg = 0
RegWrite,
RegDst = 0,
MemtoReg = 1
MemRead,
lorD = 0
MemRead,
lorD = 1
MemWrite,
lorD = 1
PCSource = 00
PCWrite
PCSource = 01,
PCWriteCond
PCSource = 10,
PCWrite
AddrCtl = 11
AddrCtl = 00
AddrCtl = 01
AddrCtl = 10
Register
control
Write MDR
Read PC
Memory
Read ALU
Write ALU
ALU
PC write control
ALUOut-cond
jump address
Sequencing
Signals active
ALUOp = 00
ALUOp = 01
Seq
Fetch
Dispatch 1
Dispatch 2
Comment
Cause the ALU to add.
Cause the ALU to subtract; this implements the compare for
branches.
Use the instruction's function code to determine ALU control.
Use the PC as the first ALU input.
Register A is the first ALU input.
Register B is the second ALU input.
Use 4 as the second ALU input.
Use output of the sign extension unit as the second ALU input.
Use the output of the shift-by-two unit as the second ALU input.
Read two registers using the rs and rt fields of the IR as the register
numbers and putting the data into registers A and B.
Write a register using the rd field of the IR as the register number and
the contents of the ALUOut as the data.
Write a register using the rt field of the IR as the register number and
the contents of the MDR as the data.
Read memory using the PC as address; write result into IR (and
the MDR).
Read memory using the ALUOut as address; write result into MDR.
Write memory using the ALUOut as address, contents of B as the
data.
Write the output of the ALU into the PC.
If the Zero output of the ALU is active, write the PC with the contents
of the register ALUOut.
Write the PC with the jump address from the instruction.
Choose the next microinstruction sequentially.
Go to the first microinstruction to begin a new instruction.
Dispatch using the ROM 1.
Dispatch using the ROM 2.
Codificação Maximal vs. Minimal
•
Sem codificação:
– 1 bit para cada operação do fluxo de dados
– rápido, requer mais memória (lógica)
– Usada para Vax 780 — 400K de memória!
•
Muita codificação:
– Enviar as microinstruções através de lógicas para a obtenção
dos sinais de controle
– Usa menos memória, lenta
•
Contexto histórico do CISC:
– Muita lógica a ser colocada num único chip
– Usar uma ROM (ou mesmo RAM) para manter o microcódigo
– Fácil para adicionar novas instruções
1998 Morgan Kaufmann Publishers
55
Microcódigo: compromisso (Trade-offs)
•
Vantagens da especificação:
– Fácil de projetar e escrever
– Projetar a arquitetura e o microcódigo simultaneamente
•
Vantagens da Implementação (off-chip ROM)
– Fácil de mudar se os valores estão em memória
– Pode emular outras arquiteturas
– Pode fazer uso de registradores internos
•
Desvantagens da Implementação, MAIS LENTO que:
– O controle seja implementado no mesmo chip como o
processador
– ROM não é mais rápido que RAM
– Quando não existe necessidade para fazer mudanças
1998 Morgan Kaufmann Publishers
56
Exceções e Interrupções
Exceções e interrupções – são eventos diferentes de branches
e jumps que mudam o fluxo normal de execução de instruções.
Exceção – evento inesperado que causa uma mudança no fluxo
de controle, que tem origem dentro do processador
(por ex. overflow aritmético)
Interrupção –evento inesperado que causa uma mudança inesperada
no fluxo de controle, que tem origem fora do processador.
(por ex. digitação de um caracter no teclado)
Observação: arquitetura 80x86 (ou IA-32, Intel) usa o termo
Interrupção para todos esses eventos.
1998 Morgan Kaufmann Publishers
57
Exceções e interrupções
Exemplos:
TIPO DE EVENTO
ORIGEM
TERMINOLOGIA
MIPS
Solicitação de
dispositivo de E/S
externa
interrupção
Chamada do SO pelo
programa de usuário
interna
exceção
Overflow aritmético
interna
exceção
Uso de uma
instrução indefinida
interna
exceção
Mal funcionamento
do hardware
ambas
exceção ou
interrupção
1998 Morgan Kaufmann Publishers
58
Como manipular exceções e interrupções
•
Ações básicas a serem tomadas pela máquina quando ocorre uma
exceção :
1) salvar o endereço da instrução ofendida (instrução atual) num
registrador especial EPC (Exception Program Counter).
2) transferir o controle (atualizar o conteúdo de PC) para um
endereço específico, que possibilite ao computador executar a rotina
de tratamento de exceção.
•
ROTINA DE TRATAMENTO DE EXCEÇÃO: depende do tipo de
exceção, por exemplo, reportar ao usuário que ocorreu um erro de
overflow.
•
Ações a serem tomadas após a execução do tratamento de exceção:
- Depende do tipo de exceção: por ex. pode encerrar, ou continuar
executanto, o programa que estava executando antes da
exceção.
- O EPC é usado para determinar o endereço de reinício da
execução.
1998 Morgan Kaufmann Publishers
59
Como saber a causa da exceção
• Para o computador manipular uma exceção, ele deve
conhecer a razão da exceção.
• A razão pode ser obtida de duas formas:
1) usar o registrador de status (cause register) que indica a
razão
2) usar interrupção vetorizada, caso em que o endereço de
desvio para executar a exceção é determinado pela causa
da exceção
1998 Morgan Kaufmann Publishers
60
Implementação de exceção no MIPS
• Implementação de duas exceções:
1) overflow aritmético
2) instrução indefinida
A causa é determinada pelo valor do registrador CAUSE de 32 bits:
CAUSE = 00 00 00 00 (em hexa), overflow aritmético
CAUSE = 00 00 00 01 (em hexa), instrução indefinida
O endereço da instrução ofendida é guardada em EPC
O endereço de desvio para o início da execução da rotina de
tratamento de exceção é dado por C0 00 00 00 (em hexa).
1998 Morgan Kaufmann Publishers
61
Alterações no fluxo de dados
PCSource
EPCWrite
ALU
PC+4
ALUOut
ALUOut
EPC
JumpAddr
C0 00 00 00
IntCause
0
0
1
2
PC
3
CauseWrite
Registradores adicionais:
EPC, Cause
0
Cause
1
1
Sinais de controle adicionais:
EPCWrite, CauseWrite,
IntCause
62
1998 Morgan Kaufmann Publishers
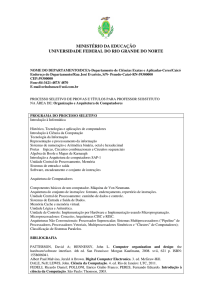
Alteração na máquina de estado
1
lw o
u sw
tipo
-R
beq
ou
jmp
s
tro
op
co
de
6
s
10
11
7
overflow
IntCause = 1
CauseWrite
ALUSrcA = 0
ALUSrcB = 01
ALUOp = 01
EPCWrite
PCWrite
PCSource = 11
IntCause=0
CauseWrite
ALUSrcA = 0
ALUSrcB = 01
ALUOp = 01
EPCWrite
PCWrite
PCSource = 11
Estado 0
Estado 0
Estado 0
1998 Morgan Kaufmann Publishers
63