1
Sumário
Introdução ................................................................... 5
O Robô Serelepe ............................................................. 7
Robôs ........................................................................... 8
O que são robôs? ............................................................ 8
Comportamento de Robôs .............................................. 8
Veículo de Braitenberg .................................................... 9
Montagem ................................................................. 12
Lista de Materiais .......................................................... 12
Exemplo de Montagem ................................................. 16
Ferramentas Necessárias ............................................... 16
Passo-a-Passo................................................................ 17
Diagrama Elétrico ...................................................... 19
Instalação e Primeiro Teste ........................................ 20
Download e instalação do Arduino IDE, plug-in Digispark e
driver Digispark ............................................................. 20
Instalando a biblioteca Serelepe .................................... 21
2
Primeiro Teste ............................................................... 21
Carregando o programa .......................................................... 21
Cuidados antes de ligar o robô ............................................... 22
Ligando o robô ........................................................................ 22
FAQ ............................................................................... 23
Cursos clubeMAKER.................................................... 24
Alguns de nossos cursos ................................................ 24
3
Robô Serelepe
4
Introdução
Parabéns! Você acabou de receber o makerBOX #1: o Robô
Serelepe! Se está lendo isso é porque deu tudo certo . Seja bemvindo à comunidade clubeMAKER! Você é, sem dúvida, um MAKER
de sucesso. Esta é a nossa primeira caixa makerBOX e ela foi criada
com muito esforço, dedicação e carinho. Deu trabalho, mas valeu
muito a pena! Você apostou no clubeMAKER, no All Electronics, na
D2G Tecnologia e na Usina Info, e por isso agradecemos pela
confiança e desejamos que seu aprendizado e diversão sejam
máximos!
“Você faz, você é um MAKER” - e o makerBOX foi feito para
você.
O Robô Serelepe é um pequeno robô muito extrovertido.
Ele tem comportamentos! Como assim? A lógica é simples e os
resultados são fantásticos, vamos lá...
A base do projeto é uma plataforma circular que é a própria
PCB (placa de circuito impresso – aquela placa verde) do circuito do
robô. Todos os componentes são soldados nela, além de fornecer
suporte mecânico estrutural. O Serelepe recebe estímulos externos
através de quatro sensores de luz LDR (Light Dependent Resistor –
os “olhinhos” do robô), que são resistores com resistência
5
dependente da luz. Com esses sensores ele pode ver e sentir o
ambiente ao seu redor! Não é só isso, para se movimentar e reagir
aos incentivos luminosos ele possui dois motores com rodinhas,
com comportamento configurável. Quem controla tudo isso é um
microprocessador DIGISPARK, compatível com Arduino. Nós vamos
aprender juntos que, com algoritmos muito simples e diretos,
poderemos criar comportamentos complexos! Exatamente isso: os
comportamentos mais bonitos dos pequenos animais, como os
insetos, são extremamente simples. Com o makerBOX #1, o Robô
Serelepe, vamos testar e apreciar isso na prática!
6
O Robô Serelepe
O robô serelepe contempla os seguintes componentes
principais e funções:
Quatro sensores de luminosidade: os olhos do robô!
Dois motores para locomoção.
Processador (cérebro) de 8 bits capaz de 16 milhões de
instruções por segundo! Nossa!
Expansão de portas digitais com registrador de deslocamento.
Multiplexação de sinais analógicos por chaveamento de
diodos.
Modulação da velocidade dos motores e do brilho dos LEDs
através de MBAM (Mirrored Bit Angle Modulation).
Biblioteca de configuração simples em plataforma Arduino.
Placa de circuito personalizada.
7
Robôs
O que são robôs?
“Um robô (ou robot) é um dispositivo, ou grupo de
dispositivos, eletromecânicos ou biomecânicos capazes de realizar
trabalhos de maneira autônoma, pré-programada, ou através de
controle humano. Os robôs são comumente utilizados na realização
de tarefas em locais inóspitos como vulcões, tubulações, fundo do
mar, superfície de outros planetas, ou na realização de tarefas
repetitivas, sujas ou perigosas para os seres humanos” (FORESTI,
2006).
Comportamento de Robôs
Diversos algoritmos foram criados ao longo do tempo para
controlar robôs conforme as necessidades do mercado e da sociedade.
Nas áreas industriais os robôs são caracterizados por comportamentos
extremamente repetitivos e bem definidos, sem espaço para erros –
máquinas essas que constroem os nossos carros, as nossas televisões
e os nossos celulares. Já no mercado de entretenimento, existe um
maior
espaço
para
o
desenvolvimento
de
algoritmos
de
comportamento dinâmico. Neste caso, utiliza-se o comportamento
dinâmico para definir ações que imitam os humanos ou os animais.
8
Uma classe de robôs que apresentam comportamentos animais
complexos e interessantes são os Veículos de Braitenberg, discutidos a
seguir.
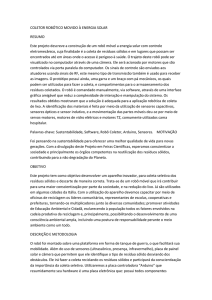
Veículo de Braitenberg
Os veículos de Braitenberg são agentes que podem se
movimentar autonomamente por aí, baseando-se nos estímulos
em seus sensores. Eles possuem sensores simples ou primitivos
(luz, som, distância) e atuadores (motores) que podem fazê-los
se mover. A ação dos atuadores é dada devido a informação
recebida pelos sensores. A conexão entre eles é feita de forma
simples, como nos seguintes exemplos:
Figura 1 – Exemplo de comportamentos com ligações simples.
9
A. O sensor de luz da direita é diretamente
conectado ao motor direito: Nessa configuração o veículo tenderá
a se virar contra a luz, já que mais luz no sensor fará com que ele
ative seu motor direito com maior intensidade, fazendo-o virar para
a esquerda.
B. O sensor de luz da esquerda é diretamente
conectado ao motor direito: Nessa configuração o veículo tenderá
a se virar para a luz, já que mais luz no sensor fará com que ele ative
seu motor direito com maior intensidade, fazendo-o virar para a
esquerda.
Ficou claro que com conexões simples – algoritmos simples
– é possível criar comportamentos filosoficamente muito
complexos. E o mais legal de tudo: o Robô Serelepe é um Veículo de
Braitenberg! A configuração das conexões entre os sensores e
motores é feita por software. Imagina o que não é possível fazer
com quatro sensores e dois motores? Quantas diferentes formas de
conexão podemos criar? Quantos comportamentos?
Nós pensamos em alguns comportamentos que você
poderá testar no seu Robô Serelepe:
10
Medo: ele fica com medo da luz! Você aponta uma
fonte de luz (lanterna, por exemplo) e ele foge.
Timidez: ele fica com vergonha, mas não foge. Você
aponta a luz e ele vira de costas, sem fugir.
Amor: seu robozinho é apaixonado pela luz. Você
aponta uma fonte de luz e ele sai correndo atrás da luz, sempre
tentando chegar mais próximo possível.
Curiosidade: seu robozinho fica curioso. Você
aponta uma fonte de luz nas costas dele e ele vira de frente. Ele
quer olhar a luz, mas não vai correr na direção dela.
Indecisão: misto de timidez e curiosidade. O robô
quer olhar para a luz, mas a timidez atrapalha... O que será que
acontece?
Estes são só alguns comportamentos que pensamos. Que
tal fazer alguns experimentos e compartilhar conosco lá no fórum
do clubeMAKER? (www.clubemaker.com.br/forum).
11
Montagem
Aqui temos um passo-a-passo básico para a montagem do
Robô Serelepe. Se você precisa de instruções mais detalhadas,
acesse agora mesmo o nosso tutorial completo de montagem do
makerBOX #1 no endereço:
www.clubemaker.com.br/makerbox
Lista de Materiais
Componente(s)
Tipo
2
Capacitor
Eletrolítico
2
Capacitor
Poliéster
1
Capacitor
Poliéster
10
Diodo
Valor
100uF
16v
100nF
63v
1nF
63v
12
Imagem
Componente(s)
Tipo
Valor
Placa
Circuito
Personalizada
Impresso
1
Circuito Integrado
Lógica
74HC595
1
LED
3mm
Verde
1
LED
3mm
Amarelo
1
4
LDR
(Sensor de Luz)
5mm
4
Resistor
1/4W
10k
2
Resistor
1/4W
330
1
Resistor
1/4W
330k
2
Resistor
1/4W
2k2
2
Transistor
Bipolar
2n2222
13
Imagem
Componente(s)
Tipo
Valor
1
Borne
AK500/2
1
Jumper
1
Soquete
Para C.I.
16 Pinos
1
Interruptor
Alavanca
MTS-102
2
Motor
1
Digispark
Micro USB
2
Feltro
Adesivo
DC130
Redondo
14
Imagem
Componente(s)
1
Clip Baterial
1
Bateria
2
Roda Aeromodelo
1
Cabo Micro USB
Tipo
Valor
9V
Espuma
D1:20mm
D2:30mm
D3:2,1mm
h:7 mm
15
Imagem
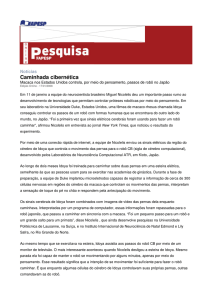
Exemplo de Montagem
Figura 2 - Foto do robô montado vista superior
Ferramentas Necessárias
Todas as ferramentas do kit de sobrevivência:
https://www.usinainfo.com.br/kit-de-ferramentas/kitbasico-de-sobrevivencia-clubemaker-4358.html
16
Passo-a-Passo
1.
Soldar todos os resistores.
a. Cores específicadas na lista de materiais.
2. Soldar todos os diodos.
a. Atenção com a polaridade!
3. Colar os motores.
a. Colocar cola quente na parte não ventilada do
motor.
b. Colar alinhando os terminais com a placa.
4. Soldar os motores.
5. Soldar soquete do CI 74HC595 (Circuito Integrado)
a. Atenção a marcação de orientação, alinhar com o
desenho na placa.
6. Soldar as barras de pinos de 3 e 6 terminais do DIGISPARK.
7. Soldar a barra de pinos de 2 terminais com o jumper.
8. Soldar capacitores nas suas devidas posições.
9. Soldar transistores nas suas devidas posições.
10. Soldar os LEDs.
11. Soldar os LDRs.
a. Mantenha os LDRs um pouco distantes da placa.
17
b. Aponte os LDRs um pouco para cima e um pouco
para o lado de fora, conforme a Figura 3.
Figura 3 – Exemplo de montagem do olho do robô, apontando para fora.
12. Soldar conector da bateria.
13. Soldar o DIGISPARK nas barras de pinos.
14. Conectar clipe da bateria.
a. Atenção a polaridade.
15. Colar rodinhas.
a. Colocar cola quente no buraco do eixo da rodinha.
b. Encaixar a rodinha no eixo do motor.
16. Soldar o interruptor de alavanca na placa.
17. Conectar bateria ao clip de bateria.
18. Colar bateria.
a. Colocar cola-quente na lateral menos larga.
b. Colar no centro do robô, entre os motores.
19. Colar os feltros no lado inferior da placa.
a. Um feltro na frente e outro atrás, conforme
indicações no verso na placa.
20. Encaixar o CI 74HC595 no seu soquete.
a. Alinhar pinos.
b. Alinhar o chanfro com o chanfro do soquete.
21. Reforçar o interruptor com cola-quente.
a. Adicionar cola-quente entre o vão da placa e o
corpo do interruptor.
18
Diagrama Elétrico
Figura 4
19
Instalação e Primeiro Teste
Download e instalação do Arduino IDE, plug-in
Digispark e driver Digispark
Baixar o Arduino do site www.arduino.cc
Clique em “Download” e selecione seu sistema
operacional (Windows, MAC ou Linux)
o No momento da escrita desse manual a versão era
a 1.6.9
Instalar o Arduino.
Abrir o Arduino.
Clicar em Arquivo/Preferências.
No campo "URLs Adicionais de Gerenciadores de
Placas:" adicione:
https://raw.githubusercontent.com/digistump/arduinoboards-index/master/package_digistump_index.json
Clique em OK.
Clique em Ferramentas/Placa/Gerenciador de
Placas...
Na busca digite "digispark".
Selecione o item "Digistump AVR Boards" e clique
em instalar.
Aguarde o término da instalação
Fazer o download dos drivers no link:
www.clubemaker.com.br/uploads/makerBOX/tools/Digisp
arkDriver.rar
Descompactar o driver do seu sistema operacional
Instalar driver “install.exe”
o
20
Instalando a biblioteca Serelepe
Baixar arquivo:
http://www.clubemaker.com.br/uploads/makerBOX/2016
05/makerBOX-Serelepe.rar
Abra o arquivo Arduino Lib/Serelepe.rar
Extraia a pasta "Serelepe" para o diretório
"libraries" no Sketchbook do Arduino. O local do sketchbook pode
ser verificado no próprio software do Arduino: clique em
Arquivo/Preferências e observe o campo "Local do Sketchbook".
Reiniciar software Arduino
Primeiro Teste
Carregando o programa
Na pasta teste do material baixado do clubeMAKER,
abra o arquivo "teste.ino" na pasta “Exemplos/teste”.
o Este é o programa a ser executado pelo robô.
No
software
do
Arduino
clique
em
Ferramentas/Placa e selecione a opção “Digispark (Default –
16.5mhz)”
Mantenha o cabo USB do Robo Serelepe
desconectado.
Clique no botão "carregar" do Arduino.
O código será compilado. Aguarde.
Quando aparecer a mensagem "Plug in device
now..." conecte o cabo USB do Robô Serelepe. Atenção: mantenha
a chave do robô na posição desligado.
o Basta notar se os LEDs estão acesos.
Aguarde o carregamento do código, até aparecer a
mensagem "Micronucleus done. Thank you!"
Remova o cabo USB
21
Cuidados antes de ligar o robô
Serelepe não foi projetado para terrenos arenosos,
portanto deve ser testado em terreno plano, sem tapetes ou
quaisquer obstruções que impeçam seu movimento.
Serelepe não contém as seguintes funções:
Nadar - O robô não é a prova d’água.
Voar - Mesas não são indicadas para teste
Ligando o robô
Escolha um local apropriado para testar o Serelepe.
Ligue o Robô.
Aponte alguma fonte de luz (Exemplo: Lanterna do
celular) ao Serelepe.
Esse teste contém o comportamento "amor" por
padrão, o que significa que o robô irá seguir a luz.
Agora divirta-se e faça mais testes com outros
comportamentos!
22
FAQ
Liguei o Serelepe e ele saiu correndo. O que fazer?
No momento do carregamento do código e na inicialização
do robô seus motores poderão ser acionados aleatoriamente. Isso
acontece porque o robô ainda não possui personalidade, ele é
apenas um animalzinho arredio.
Serelepe não se move. O que fazer?
Nos primeiros instantes em que você der vida ao Serelepe
ele se adaptará a luz do ambiente, tomando-a como padrão. Ele não
terá sentimentos em relação ao seu ambiente natural, para
desencadear emoções nele são necessárias informações de luz
diferentes da que ele está acostumado. Teste ligar ele em um lugar
mais escuro.
Como testar o comportamento Indecisão?
O programa não suporta acentuação,
comportamentos foram configurados como:
logo,
os
MEDO, TIMIDEZ, AMOR, CURIOSIDADE e INDECISAO.
Para eventuais dúvidas, consulte nosso fórum!
www.clubemaker.com.br/forum
O próximo makerBOX chega em julho! Fique ligado e não
deixe de convidar seus amigos a participar desse clube!
23
Cursos clubeMAKER
Não deixe de conferir nossos cursos no link:
http://www.clubemaker.com.br/cursos
Alguns de nossos cursos
- Programação para IOS
- Simulação de circuitos no ISIS Proteus
- Arduino Express
- Arduino – Colocando a mão na massa
- Inteligência Artificial
24