Implementação de um controlador de navegação baseado na plataforma
Arduino para um robô móvel autônomo de duas rodas
Eduardo do Valle Simões¹, Gustavo Luvizotto Cesar¹
Instituto de Ciências Matemáticas e de Computação / Universidade de São Paulo¹
[email protected]
Objetivos
Este trabalho visa projetar e desenvolver uma
estrutura de hardware e software para o
controle de navegação de um robô móvel
autônomo de duas rodas. Seu controle é
implementado em um microcontrolador Atmega,
programado
como
Arduino
[1].
São
desenvolvidos os softwares de interface com o
sensor de proximidade de obstáculos (sonar),
de driver de acionamento dos motores, de
comunicação bluetooth entre um computador e
o robô e o algoritmo de navegação do robô. A
tarefa abordada é a exploração do ambiente
externo dos prédios do ICMC-USP, na qual o
robô deve ser capaz de percorrer os espaços
navegáveis,
desviando
de
pessoas
e
obstáculos, em busca de uma coordenada
objetivo, que será fornecida via bluetooth.
sonar; interface com o driver dos motores e;
interface com o comunicador bluetooth. Cada
um possui uma montagem específica de
hardware e software os quais foram testados
ambos os âmbitos, conferindo tensões
esperadas e respostas. Além disso, foi
desenvolvido um aplicativo para o sistema
Android na versão 2.3.3 para celular o qual
captura dados do GPS e apresenta na tela. Ao
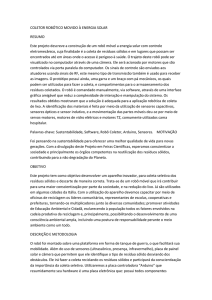
final, acoplou-se os três módulos no robô de
duas rodas e pode ser visto na Figura 1.
Métodos/Procedimentos
As técnicas de controle de navegação e
exploração se baseiam na comunicação entre o
controlador e o bluetooth, tendo o sonar de
ultrassom como único sensor. Com isso, os
robôs podem criar uma trajetória com
autonomia [2]. Contudo, tem-se que estudar e
simplificar modelos para implementação dos
robôs, lidando com limitações nos recursos de
memória, velocidade de processamento, de
sensoriamento e de consumo de bateria, já que
esse sistema de tempo real, além de tratar
informações ruidosas e de baixa precisão, como
o GPS que informará as coordenadas do robô.
Nesse trabalho foi projetado o hardware
do robô para que utilize de um sensor de
proximidade, um comunicador bluetooth e um
driver para os motores de corrente contínua.
Além disso, foi levantada uma revisão
bibliográfica sobre assuntos diversos em
robótica.
Resultados
Foram realizados testes em três módulos
distintos. São eles: interface com sensor de
Figura 1 - Montagem final do robô.
Conclusões
Nos testes de navegação foram encontrados
vários problemas com o hardware. Um deles
era o mal contato que muitas vezes estava
contido na protoboard. Além disso, as pilhas
possuíam pouca carga para alimentar os dois
motores do robô e o Arduino, que por sua vez
alimentava todo o restante do circuito. Com
isso,
havia
queda
de
tensão
e
o
microcontrolador reiniciava ou falhava a
alimentação de outros componentes, como o
sonar, por exemplo, prejudicando assim os
testes.
Referências Bibliográficas
[1]
http://www.arduino.cc/
(acessado
dia
20/03/2012)
[2] Guilherme de Lima Ottoni; Walter Fetter
Lages, “Navegação de robôs móveis em
ambientes desconhecidos utilizando sonares de
ultra-som”; SBA Controle & Automação vol.14
no.4 Campinas Nov./Dec. 2003.
1