Arlúcio da Cruz Viana
Apresentação e Propriedades do Rn
Vitória da Conquista - BA, Brasil
Maio de 2007
Arlúcio da Cruz Viana
Apresentação e Propriedades do Rn
Monograa apresentada para obtenção do
Grau de Licenciado em Matemática pela
Universidade Estadual do Sudoeste da
Bahia.
Orientador:
Antônio Augusto Oliveira Lima
Departamento de Ciências Exatas
Universidade Estadual do Sudoeste da Bahia
Vitória da Conquista - BA, Brasil
Maio de 2007
Resumo
O presente trabalho visa, primeiramente, observar a aplicação de conteúdos da Análise
Matemática e Álgebra Linear em um conjunto que será denido e aplicado utilizando
exemplos e algumas denições básicas da álgebra no primeiro capítulo da Parte I entitulada "Um subespaço de R", fazendo algumas observações notáveis. Aprofundando-se um
pouco mais no segundo capítulo, destacando as propriedades de completude dos corpos
ou espaços, constantemente recorrendo à conceitos da Análise e conteúdos de Espaços
Métricos, principalmente, não esquecendo da Álgebra Linear. Já a segunda parte se trata
de apêndices, os quais, o segundo se trata de uma discussão sobre o vértice de uma
função quadrática, a qual pode ser aplicada em um dos exemplos do primeiro capítulo.
Já o apêndice A, trata-se de um método numérico para encontrar zeros de uma função
contínua, explorando assim, a Análise Numérica.
Abstract
The present work seeks, rstly, observes the application of contents of the Mathematical Analysis and Lineal Algebra in a set that will be dened and applied using examples
and some basic denitions of the algebra in the rst chapter of the Part I with a title
"A subspace of R", making some notable observations. Being deepened a more little
in the second chapter, detaching the the complete elds or spaces properties, frequently
runnig to Analisys concepts and Metrics Spaces contents, mainly, not forgetting about the
Lineal Algebra. Already the second part treats of appendixes, the second which, it is
treated of a discussion on the vertex of a quadratic function, which can be applied in
one of the examples of the rst chapter. Already in the appendix A treates of a numeric
method to nd zeros of a continuous function, thus exploring, the Numeric Analysis.
Dedicatória
Dedico tal trabalho a todos que estiveram em participação ou contribuição do mesmo,
mesmo que em termos não concernentes ao objetivo do trabalho, a saber, familiares,
colegas, professores e amigos. Mas, principalmente à minha família, meu pais.
O poder dos números revela a perfeição da natureza, a qual reete a majestade de
Deus.
Arlúcio Viana
Agradecimentos
Por mera justiça, é imprescindível expressar os agradecimentos a todos aqueles que
estiveram e estão ligados direta ou indiretamente com o trabalho e esforço despendidos
durante todo este tempo, tanto durante o curso, quanto no importante estágio de estruturação deste trabalho; a saber: DEUS, o nosso capacitador e auxiliador em todos os
momentos. Não como tradição ou formalidade de alguém que professa uma fé, mas em
sinceridade devo agradecer primeiramente a DEUS, especialmente pela condução de toda
a minha vida, particularmente por este momento de vitória na área da matemática. Até
porque a abstração da eternidade, promessa divina para os que o amam, contém absolutamente a abstração da matemática que conduz todas as ciências, uma vez que tais
abastrações se mostram concomitantemente na natureza.
A meus pais, principalmente por conarem nas minhas decisões em relação aos meus
objetivos, que com todo amor me apoiaram, amor maior que qualquer outro amor terreno.
Pois com o ensinamento que deles recebi e a graça de DEUS, em meio ao vale rodeado
de altas montanhas, avistei uma planície verdejante e uma nascente nesse lugar, por isso
caminho nessa direção.
Aos meus colegas que estiveram a todo o tempo comigo em permutação de auxílios
em diferentes aspectos do convívio acadêmico,que sobretudo foram amigos, destacando as
Adrianas e Adriza. Aos professores que me deram atenção quando procurados por mim
para esclarecer certas dúvidas mesmo que no momento não estivessem sendo meus professores de alguma disciplina presentemente cursada, mestres e doutores que me atenderam
sempre que precisei, ressaltando Flaulles Boone Bergamaschi, Antonio Augusto Oliveira
Lima, Maria Aparecida Roseane Ramos (Cida) e Benedito Melo Acióly. Ao orientador
Antonio Augusto Oliveira Lima que me deu apoio e com paciência me instruiu até o
objetivo nal do trabalho, corrigindo, opinando, tal como me deixando conduzir o meu
objetivo. Enm, que a graça de DEUS seja com todos nós.
Sumário
Lista de Figuras
Introdução
p. 9
I Um subespaço de R
10
1 O Rn
p. 11
1.1
Denição . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
p. 11
1.2
Exemplos e Aplicações . . . . . . . . . . . . . . . . . . . . . . . . . . .
p. 11
1.3
Rn como subcorpo e subespaço de R . . . . . . . . . . . . . . . . . . .
p. 13
1.4
Algumas Observações Notáveis
. . . . . . . . . . . . . . . . . . . . . .
p. 15
1.5
O Cálculo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
p. 16
1.5.1
A Relação Módulo . . . . . . . . . . . . . . . . . . . . . . . . .
p. 16
1.5.2
Um Exemplo Simples . . . . . . . . . . . . . . . . . . . . . . . .
p. 16
1.5.3
Aplicando ao Exemplo 1.2 . . . . . . . . . . . . . . . . . . . . .
p. 17
1.5.4
A função exponencial . . . . . . . . . . . . . . . . . . . . . . . .
p. 18
2 A Completude de Rn
p. 20
2.1
Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
p. 20
2.2
Denições . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
p. 20
2.3
Vericando Algumas Propriedades de Rn . . . . . . . . . . . . . . . . .
p. 22
2.3.1
O Corpo Ordenado . . . . . . . . . . . . . . . . . . . . . . . . .
p. 22
2.3.2
A Métrica Usual da Reta . . . . . . . . . . . . . . . . . . . . . .
p. 23
2.3.3
O Corpo Ordenado Completo e Espaço Métrico Completo . . .
p. 23
2.3.4
Espaços de Banach e Hilbert . . . . . . . . . . . . . . . . . . . .
p. 25
2.3.4.1
Espaço de Banach . . . . . . . . . . . . . . . . . . . .
p. 25
2.3.4.2
Espaço de Hilbert
. . . . . . . . . . . . . . . . . . . .
p. 26
2.3.4.3
Uma Norma para Rn . . . . . . . . . . . . . . . . . . .
p. 29
II Apêndices
30
Apêndice A -- Um Método Numérico Alternativo
p. 31
A.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
p. 31
A.2 A Apresentação e Aplicação do Método . . . . . . . . . . . . . . . . . .
p. 31
A.3 Alguns Detalhes Importantes Para Mostrarmos a Convergência . . . . .
p. 37
A.4 A Convergência da Sequência . . . . . . . . . . . . . . . . . . . . . . .
p. 38
Apêndice B -- Uma Outra Fórmula para Yv da Função Quadrática
p. 40
B.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
p. 40
B.2 A Função Denida Pelo Polinômio de 2o grau . . . . . . . . . . . . . .
p. 40
B.3 Dedução da fórmula para yv . . . . . . . . . . . . . . . . . . . . . . . .
p. 42
B.4 Aplicação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
p. 43
B.4.1 Dedução para Raízes Complexas . . . . . . . . . . . . . . . . . .
p. 44
B.4.2 Aplicação no Exemplo Anterior . . . . . . . . . . . . . . . . . .
p. 44
B.4.3 O Caso de Raíz Única . . . . . . . . . . . . . . . . . . . . . . .
p. 46
B.4.4 Aplicação com Raízes Complexas . . . . . . . . . . . . . . . . .
p. 47
B.5 Mais Aplicações Geométricas
. . . . . . . . . . . . . . . . . . . . . . .
p. 48
B.6 Motivação Filosóca . . . . . . . . . . . . . . . . . . . . . . . . . . . .
p. 49
Referências
p. 50
Lista de Figuras
1
f (x) = x2 , para f : R2 → R . . . . . . . . . . . . . . . . . . . . . . . .
p. 12
2
f (x) = x2 , para f : R → R2 . . . . . . . . . . . . . . . . . . . . . . . .
p. 12
3
f (x) = 2x , para f : R → R2 . . . . . . . . . . . . . . . . . . . . . . . .
p. 19
4
f (x) = x3 + x − cos(x) . . . . . . . . . . . . . . . . . . . . . . . . . . .
p. 31
5
A secante e a sua perpendicular . . . . . . . . . . . . . . . . . . . . . .
p. 32
6
Seguindo o processo . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
p. 33
7
Terceira Iteração . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
p. 34
8
Quarta Iteração . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
p. 35
9
Quinta Iteração . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
p. 36
10
Aproximação da Sexta iteração . . . . . . . . . . . . . . . . . . . . . .
p. 37
11
y = x2 + 2x − 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
p. 42
12
Parábolas com mesmo coeciente dominante e Família de Parábolas . .
p. 45
13
Parábolas Co-simétricas Co-radiproporcionais . . . . . . . . . . . . . .
p. 46
14
Parábolas Co-simétricas Co-radiproporcionais com Raízes Complexas .
p. 47
15
Parábolas Fixas numa Reta . . . . . . . . . . . . . . . . . . . . . . . .
p. 48
16
Parábolas Fixas numa Reta Inclinada . . . . . . . . . . . . . . . . . . .
p. 48
9
Introdução
Neste capítulo iremos apresentar um subespaço do espaço Euclidiano de dimensão
igual a 1, com a seguinte motivação. Sabemos que o anel dos inteiros Z tem alguns
subconjuntos nitos com propriedades notáveis que são o conjunto dos inteiros modn,
representados por Zn . Como seria uma classe de equivalência dos números reais análoga
aos conjuntos Zn ?
Não digo que o horizonte não está tão perto, também que não está longe, nem
tampouco em regiões intermediárias; apenas vejo que está em minha frente, contudo não
sei se existe, por isso não posso dizer: logo alcançarei ou nunca chegarei, mas sim: o
perseguirei até o meu m ou o seu m.
Arlúcio Viana
10
Parte I
Um subespaço de R
11
1
O Rn
1.1 Denição
Primeiramente, o conjunto está dendo em um intervalo I = [−n, n] de modo que a
equivalência de um x real no conjunto I , se dá através da seguinte relação: Para qualquer
x ∈ R, existe um y ∈ I , tal que
(1.1)
x = y + 2kn,
para algum k ∈ N e um n ∈ N dado , uma vez que o comprimento do intervalo I é 2n,
temos que esta equivalência alcança toda a reta. Ao conjunto de cada equivalência de I
com R, denotaremos por Rn , por facilidade chamaremos de reais módulo n , n ∈ Z, o
conjunto pelo qual queremos mostrar algumas propriedades e aplicações.
1.2 Exemplos e Aplicações
Vamos agora ver alguns exemplos e aplicações do conjunto Rn .
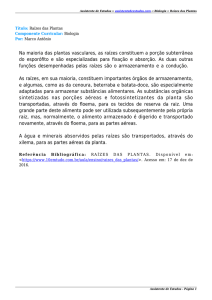
Exemplo 1.1 O exemplo a seguir mostra apenas que, uma função com domínio em Rn ,
f : Rn → R, é claramente limitada, se for limitada no intervalo I = [−n, n]. De fato, se
x ∈ I e |f (x)| ≤ k , também teremos se x ∈ Rn , então | f (x) |≤ k . Denimos f como
f (x) = x2 e n = 2, logo o Domínio de f será D = [−2,
2] e a imagem Im = [0,
4].
Observe o gráco 1:
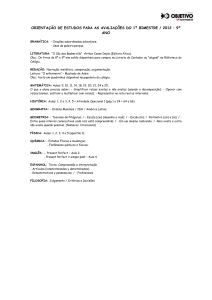
Exemplo 1.2 Façamos o contrário agora, seja Rn , o contradomínio de uma função
f : R → Rn . No presente caso ocorrerá alguns resultados intrigantes. O primeiro é a
Imagem da função inevitavelmente estará Im ⊆ [−n,
n], e mais, Im(I) ⊆ Im(Rn ), vide
gura 2. Outro é em relação às raízes da função, vamos ter um número maior de raízes
que antes, na verdade uma innidade delas, isso se a função tiver pelo menos uma raíz
com o Contradomídio em R. Porém para conservar a denição de função, temos que con-
1.2 Exemplos e Aplicações
12
y
3.5
3
2.5
2
1.5
1
0.5
-1.5
-1
-0.5
0
0.5
1
1.5
Figura 1: f (x) = x2 , para f : R2 → R
siderar o intervalo I como aberto, consequentemente, teremos também uma innidade de
descontinuidades pontuais. Tomemos um exemplo bem simples. Seja a função quadrática
f (x) = x2 , tal que f : R → R2 . Para achar as raízes devemos encontrar todos os valores que satisfazem x2 = 0, no caso temos os seguintes valores para x2 = {0, ±4, ±8, ...},
√
portanto x = {0, ±2, ±2 2, ...}, pois f (−2) = f (2) = 22 = 4 ≡ 0 e assim com os outros
elementos do conjunto. Gracamente, observe que as retas paralelas a ao eixo Y estão
indicando os pontos de descontinuidade da função, uma vez que R2 está denido num
intervalo aberto I = (−n, n), sendo assim chamado de R2 degenerado.
y
1.5
1
0.5
x
0
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-0.5
-1
-1.5
Figura 2: f (x) = x2 , para f : R → R2
2.5
3
3.5
1.3 Rn como subcorpo e subespaço de R
13
Logo percebemos que as descontinuidades são innitas, uma vez que entre um ponto
de descontinuidade e outro existe apenas uma raíz, nesse caso em particular
1
. E assim
como vimos na sequência, também é innita a quantidade de raízes (todos os múltiplos de
4).
1.3 Rn como subcorpo e subespaço de R
Vamos agora vericar algumas propriedades algébricas sobre esse conjunto. Primeiramente vericar se Rn é corpo, ou melhor, subcorpo de R, uma vez que um subcorpo é
também um corpo. Enunciaremos as propriedades necessárias para um conjunto V ser
um Espaço Vetorial.
Denição 1.1
1. Dados os elementos u, v e w de V , temos
(u + v) + w = u + (v + w).
2. Existe um elemento de V , denotado por 0, tal que
0+u=u+0=u
para todo elemento de V .
3. Dado um elemento u de V , existe um elemento −u em V tal que
u + (−u) = 0.
4. Para quaisquer elementos u e v de V , temos
u + v = v + u.
5. Se c é um número, então
c(u + v) = cu + cv.
6. Se a e b são dois números, então
(a + b)u = au + bu.
1 em
outro caso poderemos ter um número innito ou nito de descontinuidades , basta que exista um
número innito ou nito de raízes entre estas duas descontinuidades e ocorra o fato da observação 1.1.
1.3 Rn como subcorpo e subespaço de R
14
7. Se a e b são dois números, então
(ab)u = a(bu).
8. Para todo elemento u de V , temos
1u = u
(1 é aqui o número um).
Segundo [3], um subconjunto L de um corpo K será um subcorpo se:
1. 1 ∈ L.
2. a, b ∈ L ⇒ ab−1 ∈ L.
3. a, b ∈ L ⇒ a − b ∈ L.
Observe que podemos reduzir nossa denição apenas às condições 2 e 3, pois a condição
1 é satisfeita em ii. quando a = b 6= 0. Mostremos que Rn é um subcorpo de R e portanto
um corpo. Com efeito, ele é um subconjunto de R e como já vimos que todo elemento
de Rn tem uma correspondência sobrejetora com R, logo todo produto ou soma de seus
elementos será um número real que tem seu correspondente em Rn . E mais, todo elemento
tem inverso, tanto aditivo quanto multiplicativo. De fato, o inverso aditivo é claro, pois
podemos ver facilmente que os intervalos [0,
n] e [0,
−n] são opostos com relação a
adição. Já no caso multiplicativo, pode o inverso não ser um elemento de I , todavia
poderemos encontrar um correspondente a ele no intervalo I , portanto pertencendo ao
conjunto Rn . Isso mostra que as condições i. e ii., portanto temos um subcorpo de R.
Da mesma forma podemos concluir que é um Espaço Vetorial, uma vez que conserva
todas as propriedades de R para Espaços Vetoriais [4]. Para isso, daremos as condições
de subespaço vetorial.
Seja V um espaço vetorial, e seja W um subconjunto de V . Dizemos que W é um
subespaço vetorial de V se W satisfaz as seguintes condições:
1. Sejam v e w elementos de W , a soma v + w também é um elemento de W .
2. Se v é um elemento de W e c é um número, cv é um elemento de W .
3. O elemento 0 de V , também é um elemento de W .
1.4 Algumas Observações Notáveis
15
Em outras palavras, W é fechado para a adição e multiplicação por escalar, também 0
e elemento de W . Podemos vericar facilmente que Rn é um subespaço vetorial de R sobre
R, basta lembrarmos que Rn é corpo, e portanto fechado para a adição e possui o elemento
0. Basta mostrarmos o ítem 2, i.e, um número real multiplicado por um elemento de Rn
ainda pertence a este conjunto. De fato, uma vez que tal produto é sempre um número
real, o qual, pela relação 1.3, tem um correspondente no Reais modulo n. Logo Rn é um
subespaço vetorial de R sobre R.
Apresentemos outras propriedades em forma de observações:
1.4 Algumas Observações Notáveis
Observação 1.1 Vimos no exemplo 2 que uma função que tem apenas uma raíz se a
imagem for denida em R, passa a ter innitas raíz com a imagem denida em Rn , assim
será com todas as funções que tiverem a imagem denida nos Reais Módulo n, desde que
para qualquer K ∈ R∗+ , existe A ∈ R∗+ sucientemente grande, tal que, x ∈ R, x > A ⇒
| f (x) |> K ou | f (x) |< −K . Semelhantemente para x < A. De fato, basta observar
que o intervalo [0, +∞) ou o intevalo (−∞, 0] contém innitas vezes intervalos do tipo
(−n, n) e para cada correspondente desse intervalo teremos pelo menos uma raíz, uma
vez que podemos observar que f (kn + ε) < 0 < f (kn + 2n − ε), k ∈ Z, podemos usar o
T.V.I
2
, considerando que f é descontínua em x = kn
3
e seria contínua se sua imagem
estivesse denida em R, e f contínua no intervalo A = [kn + ε, kn + 2n − ε], ∀ε > 0,
temos que existe pelo menos um a ∈ A tal que, f (a) = 0, como temos innitos intervalos
que têm correspondência com A, consequentemente haverão innitas raízes, todavia uma
quantidade enumerável, uma vez estabelecida a correspodência.
Observação 1.2 Como consequência da observação anterior, temos que as funções contínuas e monótonas têm innitas raízes se a imagem estiver denida em Rn .
Observação 1.3 Podemos observar também, a partir da conclusão que tivemos sobre
√
quem são as raízes da função, que as raízes vão ser da forma x = 2 k,
∀k ∈ N.
Observação 1.4 Em outros casos, para calcularmos alguma aproximação das raízes de
f , podemos utilizar o Método Numérico apresentado no Apêndice, uma vez que vimos que,
se a função é contínua em R, ela será contínua em todo intervalo [n + ε,
2O
Teorema do Valor Intermediário que está enunciado no apêndice deste trabalho
de Primeira Espécie
3 Descontinuidade
n − ε].
1.5 O Cálculo
16
1.5 O Cálculo
No exemplo 2, nós mostramos geometricamente como caria a função f (x) = x2 se
estivesse com a imagem denida em R2 , observemos como os cáculos foram feitos para
que chegássemos àquele gráco. Vamos buscar base na relação 1.1.
1.5.1 A Relação Módulo
A relação 1.1 é uma relação análoga à relação de módulo. Vejamos a denição.
Denição 1.2 A relação de equivalência em Z chamada congruência ≡ modn,
a ≡ bmodn, signica que
a−b
n
= k.
Isso implica que a − b = kn ⇒ a = b + kn, onde a, k, n ∈ Z e b ∈ Zn o que será não
necessariamente obrigatório em 1.1. Todavia a idéia segue a mesma, assim como o cálculo
é análogo. Apenas fazendo simples adaptações.
1.5.2 Um Exemplo Simples
Tomemos o seguinte exemplo considerando números racionais para destacar a crucial
diferença entre nossa congruência e a congruência dos inteiros módulo n, trabalhando com
valores concretos para melhor ilustrar.
Exemplo 1.3 Tomando n = 3, temos o R3 . Vamos calcular qual será o número equivalente a 15.45 ∈ R, tal que seja equivalente em R3 .
Vejamos, pela equação 1.1, temos que 15.45 = y + 6k ⇒ y = 15.45 − 6k , porém k ∈ N,
calculamos como no modn, y = 15.45 − 6k para o maior k ∈ N, logo k = 2 ⇒ y = 3.45.
Mas y ainda não é o valor equivalente, agora somamos y ao −n, no caso −3, logo o valor
equivalente a = y − n ⇒ a = 3.45 − 3 ⇒ a = 0.45
Assim vimos que existe outra equação complementar que nos auxilia,
a = y − n,
a ∈ Rn ,
(1.2)
y∈I
Fazendo a conexão entre as equações 1.1 e 1.2, temos a = y − n ⇒ y = a + n logo:
x = a + n + 2kn ⇒ x = a + (2k + 1)n,
a ∈ Rn ,
x ∈ R,
k, n ∈ Z
(1.3)
1.5 O Cálculo
17
Podemos também escrever
a = x − (2k + 1)n
Observe que a ∈ Rn também signica dizer que −n ≤ a ≤ n e que 2k + 1 é um número
ímpar. Vamos agora utilizar a equação 1.3 para fazer o mesmo cálculo acima. Lembrando
que x = 15.45,
n = 3:
x = a + (2k + 1)n ⇒ 15.45 = a + (2k + 1)3 ⇒ a = 12.45 − 6k
Basta escolher um k que conserve a entre 3 e -3, no caso k = 2. Seguindo menos a
intuição, podemos escrever:
−3 ≤ 12.45 − 6k ≤ 3 ⇒ 15.45 ≥ 6k ≥ 9.45 ⇒ 1.59 ≤ k ≤ 2.59
Como k é natural, concluimos que k = 2, e portanto
a = 12.45 − 12 ⇒ a = 0.45
Alguns desses passos podem ser imediatamente omitidos apenas pela compreensão do
método e da similaridade com a relação de equivalência dos inteiros.
1.5.3 Aplicando ao Exemplo 1.2
Primeiramente, encontramos os pontos de descontinuidade, ou seja, onde a função
f (x) = n, no caso n = 2, são pontos de descontinuidade pois a imagem está denida nos
Reais Módulo n degenerado 4 . Logo não temos f (n) denido.
√
Observe que para x2 = 2, x = 2, ou os seus equivalentes em R. Sendo assim,
calculemos todos os números pertencente aos Reais, tais que o seu quadrado seja igual
a 2 ∈ R2 . Portanto, usando 1.3 para calcular os equivalentes a 2, temos o que foi enunciado sem maiores detalhes no exemplo 2. Temos um conjunto D de todos esses valo√
res reais que satisfaz nosso exemplo x = 2: D2 = {2, 6, 10, ...}, consequentemente
√ √ √
D = { 2, 6, 10, ...}. Aí estão os pontos de descontinuidade.
Analogamente podemos calcular as raízes.
4 Chamamos
assim ao conjunto Rn quando este está denido no intervalo aberto (-n,n).
1.5 O Cálculo
18
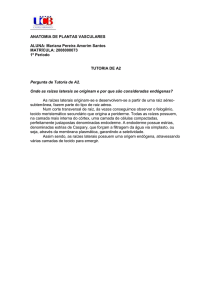
1.5.4 A função exponencial
Para que esta seção se torne suciente, tomemos outro exemplo, uma vez que agora
o método e a relação já estão mais formais e claros. Desejamos assim, tomar a função
exponencial aplicando a observação 1.2. O motivo é, primeiramente utilizar a armação
feita na Observação 1.1, uma vez que tal função não possui raíz se não tiver termos independentes de x e seu Contradomínio for denido em R. Vamos denir a função f (x) = 2x
tal que f : R − D → R2 , onde D é o conjunto dos pontos de descontinuidades que veremos a seguir. Logo vemos que a função não possui um zero se tiver o Contradomínio
em R. Com o Contradomínio em R2
5
, calculemos os pontos de descontinuidade, no
caso y = 2, logo devemos resolver a equação x = 2 em R2 achando soluções em R. Seja
D, o conjunto de todos os pontos de descontinuidade de f . Levando em conta que o
ponto de descontinuidade com Imagem em Im(f ) é x = 1, portanto os pontos de descontinuidades são encontrados considerando {2 ≡ 6 ≡ 10...} como a Imagem f (D) dos pontos de descontinuidade, logo calculamos os pontos de descontinuidade da seguinte forma:
2d1 = 2 ⇒ d1 = 1, continuando, 2d2 = 6 ⇒ 2d2 = 2 × 3 ⇒ 2d2 −1 = 3 ⇒ d2 = 1 + log2 3.
O terceiro ponto de descontinuidade, 2d3 = 10 ⇒ 2d3 −1 = 5 ⇒ d3 = 1 + log2 5 e assim
sucessivamente. Logo podemos deduzir que D = {1, 1 + log2 3, 1 + log2 5, 1 + log2 7, ...}, de
uma forma geral
D = 1 + log2 (2k + 1),
para todo k ∈ N.
Já para calcular as raízes, se resume em resolver a equação 2x = 0, mas ela não tem
solução se 0 ∈ R, contudo, em R2 , 0 ≡ 4 ≡ 8 ≡ 12 ≡ ... ≡ 4k ≡ ..., o que nos possibilita
encontrar as raízes de f , inclusive pela Observação 1.1. Façamos os cálculos indexando
as raízes da seguinte forma: 2x1 = 4 ⇒ x = 2, 2x2 = 8 ⇒ x = 3, 2x3 = 12 ⇒ 2x3 −2 = 3 ⇒
x3 = 2 + log2 3, de uma forma geral chamamos de R o conjunto das raízes de f , temos
2xk = 4k ⇒ 2xk −2 = k ⇒ xk = 2 + log2 k , portanto:
R = xk = 2 + log2 k.
para todo k ∈ N.
Vamos vizualizar gracamente tal função, sem explicitar os pontos de descontinuidade
e explicitando-os nas guras abaixo.
5 Para
nerado.
não precisarmos repetir, consideramos, pelo mesmo motivo citado no exemplo 1.2, o R2 dege
1.5 O Cálculo
19
y
1.5
1
0.5
x
0
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
0.5
1
1.5
2
2.5
3
3.5
4
-0.5
-1
-1.5
y
1.5
1
0.5
x
0
-3
-2.5
-2
-1.5
-1
-0.5
0
-0.5
-1
-1.5
Figura 3: f (x) = 2x , para f : R → R2
20
2
A Completude de Rn
2.1 Introdução
Dedicamos um capítulo especialmente para analisar a completude do Rn , pois a noção
de corpo e espaço métrico completo é uma das mais importantes da Análise Matemática,
o leitor poderá consultar [6], [8], [9] e [7] para um rápido esclarecimento.
2.2 Denições
Com Olmsted ou Rudin podemos encontrar uma denição de Corpo Ordenado.
Denição 2.1 (Corpo Ordenado) . Um Corpo Ordenado é um corpo F que contém
um subconjunto P tal que:
1. P é fechado com respeito a adição; isto é,
x ∈ P, y ∈ P ⇒ x + y ∈ P
2. P é fechado com respeito à multiplicação; isto é,
x ∈ P, y ∈ P ⇒ xy ∈ P
3. x ∈ F ⇒ exatamente uma dos três enunciados é verdadeiro:
x ∈ P;
x = 0;
−x ∈ P
Vejamos como Elon dene os Espaços Métricos Completos, mas para isso antes denimos Métricas e Espaços Métricos.
Denição 2.2 (Métricas) . Uma Métrica no conjunto M é uma função d : M × M →
R, que associa cada par ordenado de elementos x, y ∈ M um número real d(x,y), chamado
2.2 Denições
21
distância de x a y, de modo que sejam satisfeitas as seguintes condições para quaisquer
x, y
e
z ∈ M:
1. d(x,x)=0
2. Se x 6= y então d(x, y) > 0
3. d(x, y) = d(y, x)
4. d(x, z) ≤ d(x, y) + d(y, z)
Denição 2.3 (Espaço Métrico) . Um Espaço Métrico é um par (M, d), onde M é
um conjunto e d é uma métrica de M.
Denição 2.4 (Espaço Métrico Completo) . Diz que o Espaço Métrico M é completo quando toda sequência de Cauchy em M é convergente.
Já a denição de Corpo Ordenado Completo, segundo Olmsted , pode ser reduzida à:
Denição 2.5 (Corpo Ordenado Completo) . Um Corpo Ordenado Completo é
um corpo ordenado F no qual uma menor cota superior existe para todo conjunto em F
não-vazio que seja limitado em F.
Em [8] encontramos as seguintes denições:
Denição 2.6 (Espaço de Banach) . Um espaço vetorial normado completo chama-se
Espaço de Banach
Denição 2.7 (Espaço de Hilbert) . Um Espaço de Hilbert é um espaço vetorial
H , munido de um produto interno, e completo em relação à norma denida por esse
produto interno.
Mas, para melhor compreensão, devemos denir norma e produto interno.
Tais
denições podem ser encontradas em [10].
Denição 2.8 (Norma) . Uma norma num espaço vetorial E é uma função que associa
a cada vetor x ∈ E um número real |x| de modo a serem satisfeitos os seguintes axiomas:
2.3 Vericando Algumas Propriedades de Rn
1. |0| = 0,
22
|x| > 0 para todo x 6= 0 em E ;
2. |x + y| ≤ |x| + |y| quaisquer que sejam x, y e E ;
3. |λx| = |λ||x| para todo número real λ e todo vetor x ∈ E .
Um espaço vetorial munido de uma norma chama-se um espaço vetorial normado.
Denição 2.9 (Produto Interno) . Um produto interno num espaço vetorial E é uma
função E × E → R, que associa a cada par de vetores x, y e E um número real hx, yi,
com as seguintes propriedades:
1. hx, yi = hy, xi,
2. hαx + βx0 , yi = α hx, yi + β hx0 , yi,
3. hx, xi > 0 quando x 6= 0;
onde x, y ∈ E e α, β ∈ R são arbitrários.
2.3 Vericando Algumas Propriedades de Rn
Podemos facilmente vericar se algumas propriedades são válidas em Rn se pudermos
armar-las em R na maioria dos casos.
2.3.1 O Corpo Ordenado
De fato R é um corpo, uma vez que é fechado para a adição e multiplicação usuais,
possuindo as propriedades associativa, comutativa, elemento neutro e inverso para as duas
operações, além da distributividade da soma em relação ao produto. Para mostrar que é
um corpo ordenado agora, basta exibir o subconjunto R∗+ de R que obedecerá o ítem iii
da denição 2.1.
Quanto ao Rn já mostramos que é subcorpo de R, portanto corpo. Da mesma forma,
tomemos o subconjunto R∗+ n de Rn e ele também obedecerá o ítem iii da denição 2.1.
Assim feito mostramos que Rn é ordenado.
2.3 Vericando Algumas Propriedades de Rn
23
2.3.2 A Métrica Usual da Reta
A métrica usual da reta é a distância entre dois pontos desta reta, ou seja, do conjunto
dos números reais. Tal distância é dada por d(x, y) =| y −x |, vamos vericar as condições
dadas em 2.2:
1. d(x, x) = |x − x| = |0| = 0. Se x 6= y então d(x, y) = |y − x| > 0, decorrente
da propriedade do valor absoluto e que as medidas de comprimento são dadas por
números positivos, assim também é o caso da distância entre dois pontos de uma
reta.
2. d(x, y) = |y − x| = |x − y| = d(y, x), também decorre que a distância entre dois
pontos não altera se o sentido for alterado.
3. d(x, z) ≤ d(x, y) + d(y, z) ⇒ |z − x| ≤ |y − x| + |z − y| = |z − y| + |y − x| ⇒ |z − x| ≤
|z − y| + |y − x|, da geometria, a desigualdade triangular que se aplica do lados de
um triângulo ao valor absoluto, tomando |x − y| como a distância entre os vértices
X e Y de um triângulo.
Assim, denimos a métrica da reta. Agora façamos uma observação:
Observação 2.1 Se M é um espaço métrico e um subconjunto S ⊂ M , imediatamente
podemos considerar uma restrição de d a S × S , i.e., a métrica de S é induzida pela
métrica de M . Quando isso ocorre, chamamos o subconjunto S de subespaço métrico
de M .
Naturalmente podemos admitir que, como Rn ⊂ R, temos que a métrica usual da reta
é uma métrica de Rn é induzida por R, portanto Rn é um subespaço métrico.
2.3.3 O Corpo Ordenado Completo e Espaço Métrico Completo
Primeiro vamos enunciar o Postulado de Dedekind:
Denição 2.10 (Postulado de Dedekind) Todo subconjunto não-vazio de R, constituído de elementos positivos, tem ínmo.
Em outras palavras, dizemos que R é um corpo ordenado completo segundo a Denição
2.5. Agora mostremos também que Rn é ordenado completo. De fato, como R é ordenado
2.3 Vericando Algumas Propriedades de Rn
24
completo e todo subconjuno de Rn é um subconjunto de R, uma vez que Rn ⊂ R, sabemos
pelo Postulado de Dedekind 2.10, que todo subconjunto de elementos positivos tem um
ínmo, assim como pelo 2.5, todo subconjunto que for limitado superiormente, possui um
supremo. Como isso ocorre para todo subconjunto de R que obedece as hipóteses, logo
também será verdadeiro para os subconjuntos de Rn que obedecem as hipóteses, pois são
subconjuntos de R. O que garante que Rn é ordenado completo.
Analisemos como Espaço Métrico Completo. Na subseção anterior, vimos que tanto R
como Rn são Espaços Métricos, para que sejam completos, basta que vericar a Denição
2.4. Primeiramente mostraremos que R é um espaço métrico completo. Mas para isso
vamos enunciar algumas proposições necessárias para a prova.
Proposição 2.1 Uma sequência de Cauchy que possui uma subsequência convergente é
convergente (e tem o mesmo limite que a subsequência).
Proposição 2.2 Toda sequência monótona e limitada de números reais é convergente.
Proposição 2.3 Um ponto a, num espaço métrico M , é limite de uma subsequência de
(xn ) se, e somente se, toda bola aberta de centro a contém termos (xn ) com índices n
arbitrariamente grandes.
Agora vamos enunciar e demonstrar a proposição que nos motivou a enunciar as
proposições anteriores.
Proposição 2.4 A reta é um espaço métrico completo.
Demonstração.
n ∈ N,
Xn = {xn ,
Seja (xn ) uma sequência de Cauchy em R.
Pondo, para cada
xn+1 , ...}, temos X1 ⊃ X2 ⊃ ... ⊃ Xn ⊃ ... e os conjuntos Xn são
limitados. Seja an = inf Xn (n = 1, 2, 3, ...). Então a1 ≤ a2 ≤ ... ≤ an ≤ ... ≤ b = supX1 .
Pela Poposição 2.2, existe o número a = liman . Armamos que a = limxn . Para provar
isto, basta mostrar que a é limite de uma subsequência de (xn ), ou seja, dados arbitrariamente, ε > 0
e n1 ∈ N, podemos obter n > n1 tal que xn ∈ (a − ε,
a + ε), decorrente
das Proposições 2.1 e 2.3. Sendo a = liman ; ∃m > n1 tal que a − ε < am < a + ε.
Como am = inf Xm , existe n ≥ m (e portanto n > n1 ) tal que am ≤ xn ≤ a + ε, isto é,
xn ∈ (a − ε,
a + ε).
Para mostrar que Rn é um espaço métrico completo, usaremos as seguintes proposições
e denições:
2.3 Vericando Algumas Propriedades de Rn
25
Denição 2.11 Um ponto a diz-se aderente a um subconjuto X de um espaço métrico
M quando d(a, X) = 0, i.e., ∀ε > 0, podemos encontrar x ∈ X tal que d(a, x) < ε.
Nos Reais podemos escrever a denição da seguinte forma:
Denição 2.12 Diremos que um ponto a é aderente a um conjunto X ⊂ R quando a for
limite de uma sequência de pontos xn ∈ X
Proposição 2.5 Toda sequêcia convergente é de Cauchy.
Proposição 2.6 Um subespaço fechado de um espaço métrico completo é completo. Reciprocamente, um subespaço completo de qualquer espaço métrico é fechado.
Demonstração. Seja F ⊂ M fechado, com M completo. Dada uma sequência de
Cauchy (xn ) em F , existe limxn = a ∈ M . Como F é fechado em M , tem-se a ∈ F ,
uma vez que todo ponto aderente a F é ponto de F . (Vide Denições 2.11 e 2.12). Logo
F é completo. Por outro lado, se M ⊂ N é um subespaço completo, dada a sequência
de pontos xn ∈ M , com limxn = a ∈ N , a sequência (xn ) é de Cauchy, pela Proposição
2.5. Logo existe b ∈ M tal que limxn = b, pois M é completo. Pela unicidade do limite,
tem-se a = b e portanto M é fechado N , uma vez que todo ponto que é limite de uma
sequência de M pertence a M , ou seja, todo ponto aderente a M pertence a M .
Como Rn é fechado e é subespaço do espaço métrico R, onde provamos na proposição
2.4 que é completo, pela proposição 2.6, temos que Rn é completo. Porém não podemos
dizer o mesmo para Rn degenerado. Basta tomarmos uma sequência de Cauchy que não
convirja em Rn . Tomemos então a sequência xk = n − k1 , ∀k ∈ N. De fato, limxk = n,
mas n ∈
/ Rn degenerado, portanto (xk ) não converge, consequentemente Rn degenerado
não pode ser um subespaço métrico completo.
2.3.4 Espaços de Banach e Hilbert
2.3.4.1 Espaço de Banach
Primeiro veriquemos R como um Espaço de Banach segundo a Denição 2.6. Para
isso, basta obter uma norma em R, uma vez que já mostramos que é um espaço vetorial
√
e completo. Seja |x| = x2 uma possível norma de R, veriquemos se realmente é uma
norma de acordo a Denição 2.8:
2.3 Vericando Algumas Propriedades de Rn
1. |0| =
√
02 = 0 e |x| =
√
26
x2 , como x ∈ R temos que x2 > 0 ⇒
√
x2 > 0 se x 6= 0,
portanto |x| > 0 se x 6= 0,
2. Primeiramente observemos a seguinte desigualdade consequente do ítem anterior:
√
x ≤ |x| =
x2 , uma vez que |x| > 0 mesmo que x < 0. Logo temos
√ p
√ p
xy ≤
x2 y 2 ⇒ x2 + 2xy + y 2 ≤ x2 + 2 x2 y 2 + y 2 , daí temos
p
p
√
√
p
(x + y)2 ≤ ( x2 + y 2 ) ⇒ (x + y)2 ≤ x2 + y 2 logo
|x + y| ≤ |x| + |y|
3. Sendo λ, x ∈ R temos que |λx| =
p
(λx)2 =
√
λ 2 x2 =
√ √
λ2 x2 isso implica que
|λx| = |λ||x|.
Assim satisfetitas as condiões, vericamos uma norma
1
em R, portanto R é um
Espaço de Banach.
Quanto a Rn basta vericar se esta ou alguma outra norma o serve. Com a norma de
R, temos um problema logo no ítem 1, nem todo número x ∈ Rn implica que x2 > 0 e
isso foi usado para mostrar o ítem 1. Como contra-exemplo, tomemos o número 1.5 ∈ R2 ,
veja que (1.5)2 = 2.25 ≡ −1.75 ∈ R2 . Logo essa norma não pode ser norma de Rn
se concluímos que, diferentemente da métrica, a norma pode não ser sempre induzida.
Portanto não podemos garantir que é um espaço de Banach.
2.3.4.2 Espaço de Hilbert
Armamos que Rn é um espaço de Hilbert. Com efeito, pela denição 2.7, devemos
mostrar que é um espaço vetorial completo e munido de um produto interno. Para mostrar
que Rn é um espaço vetorial sobre R vamos partir da denição 1.1. Sejam os vetores
x, y, z ∈ Rn tais que x = (x1 , ..., xn ), y = (y1 , ..., yn ) e z = (z1 , ..., zn ), onde as coordenadas
dos vetores são números reais e possuem suas propriedades de corpo, logo temos que:
1. (x + y) + z = (x1 + y1 , ..., xn + yn ) + (z1 , ..., zn ) = (x1 + y1 + z1 , ..., xn + yn + zn ). Como
as coordenadas de cada n-upla são números reais, já vimos que para os números
reais vale a associatividade, logo podemos ter (x1 + y1 + z1 , ..., xn + yn + zn ) =
(x1 , ..., xn ) + (y1 + z1 , ..., yn + zn ) = x + (y + z).
1 Tal
norma é conhecida com a norma Euclidiana, e pode ser escrita como |x| =
∀x ∈ Rn , x = (x1 , ..., xn ), n ∈ N
pPn
2
i=1 (xi ) ,
2.3 Vericando Algumas Propriedades de Rn
27
2. Existe o vetor 0 = (0, ..., 0) tal que x + 0 = (x1 + 0, ..., xn + 0) = 0 + x = (0 +
x1 , ..., 0 + xn ) = (x1 , ..., xn ) = x
3. Para qualquer vetor x = (x1 , ..., xn ) existe um vetor −x = (−x1 , ..., −xn ) tal que
x + (−x) = (x1 − x1 , ..., xn − xn ) = (0, ..., 0) = 0.
4. x + y = (x1 + y1 , ..., xn + yn ) = (y1 + x1 , ..., yn + xn ) = y + x
5. Se c um número real, x, y ∈ Rn , então c(x + y) = c(x1 + y1 , ..., xn + yn ) = (cx1 +
cy1 , ..., cxn +cyn ) = (cx1 , ..., cxn )+(cy1 , ..., cyn ) = c(x1 , ..., xn )+c(y1 , ..., yn ) = cx+cy
6. Sejam a e b números reais, então (a + b)x = ((a + b)x1 , ..., (a + b)xn ) = (ax1 +
bx1 , ..., axn + bxn ) = (ax1 , ..., axn ) + (bx1 , ..., bxn ) = a(x1 , ..., xn ) + b(x1 , ..., xn ) =
ax + bx
7. Sejam a e b números reais, então (ab)x = (ab)(x1 , ..., xn ) = (abx1 , ..., abxn ) =
a(bx1 , ..., bxn ) = a(bx).
8. Para todo elemento x de V , temos que o número real 1x = (1x1 , ..., 1xn ) = (x1 , ..., xn ) =
x.
Para mostrar que Rn é completo vamos enunciar e mostrar uma proposição e alguns
corolários, além de algumas denições.
Denição 2.13 (Aplicação Uniformemente Contínua) .
Uma
aplicação
f : M → N diz-se uniformemente contínua quando, para todo ε > 0 dado, existir
δ > 0 tal que, sejam quais forem x, y ∈ M , d(x, y) < δ ⇒ d(f (x), f (y)) < ε.
Denição 2.14 (Imersão Isométrica) . Uma aplicação f : M → N chama-se uma
imersão isométrica quando d(f (x), f (y)) = d(x, y) para quaisquer x, y ∈ M . Neste
caso, diz-se que f preserva as distâncias.
Denição 2.15 (Isometria) . Uma isometria é uma imersão isométrica sobrejetiva.
Podemos dizer também sobre isometria que
Denição 2.16 (Isometria) Seja V um espaço vetorial sobre o corpo K munido de produto interno.
O operador linear T : V → V é chamado de isometria se
||T (u)|| = ||u||;
∀u ∈ V .
2.3 Vericando Algumas Propriedades de Rn
28
Proposição 2.7 O produto cartesiano M × N é completo se, somente se, M e N são
completos.
Demonstração. Suponhamos M e N completos. Dada uma sequência de Cauchy (zn )
em M × N , seja (zn ) = (xn , yn ), para cada n ∈ N. Como as projeções p1 : M × N → M
e p2 : M × N → N são uniformemente contínuas, (xn ) e (yn ) são sequências de Cauchy
em M e N respectivamente. Logo existem limxn = a ∈ M , limyn = b ∈ N . Pondo
c = (a, b) ∈ M × N , temos limzn = c. Assim, M × N é completo. Reciprocamente,
se M × N é completo então, xando b ∈ N , vemos que a aplicação x 7→ (x, b) é uma
isometria de M sobre o subespaço fechado M × b ⊂ M × N . Segue-se da Proposição
2.6 que M é completo. De modo análogo vemos que N é completo. De fato, basta xar
a ∈ M , podemos ver a aplicação x 7→ (a, x) também é isometria de M sobre o espaço
fechado a × N ⊂ M × N , logo pela Proposição 2.6 que N é completo.
Corolário 2.1 M1 × ... × Mn é completo se, e somente se, M1 , ..., Mn são completos.
Demonstração. Aplicando n − 1 vezes a proposição, concluímos sucessivamente que
M1 × M2 ,
M1 × M2 × M3 ,
M1 × M2 × ... × Mn são completos se cada um dos fatores
Mi é completo. Para maior facilidade, basta observar indutivamente M1 ×, ..., ×Mn−1 =
Kn completo para todo Mi com i ∈ N, logo, pela proposição, Kn × Mn é completo.
Reciprocamente, se o produto é completo, cada fator Mi pode ser isométrico ao subespaço
fechado a1 × ... × ai−1 × Mi × ai+1 × ...an do produto.
Corolário 2.2 O espaço Euclidiano Rn é completo.
Demonstração. Com efeito. Como já mostramos que R é completo, basta aplicarmos
o corolário anterior, que teremos Rn = R
. . × R}, o que mostra que Rn é completo.
| × .{z
n
n
Agora basta mostrar que R é munido de um produto interno. Denimos um produto
P
interno em Rn , tal que dados x, y ∈ Rn e ∀α, β ∈ R, hx, yi = x1 y1 + ... + xn yn = ni=1 xi yi .
Veriquemos se este é realmente um produto interno e, Rn de acordo as condições da
Denição 2.9.
1. hx, yi = x1 y1 + ... + xn yn =
Pn
i=1
xi y i =
P
i = 1n yi xi = y1 x1 + ... + yn xn = hy, xi
2. hαx + βx0 , yi = h(αx1 , ..., αxn ) + (βx0 1 , ..., βx0 n ), yi = h(αx1 + βx0 n , ..., αxn βx0 n ), yi
y1 (αx1 + βx0 1 ) + ... + yn (αxn + βx0 n ) = αx1 y1 + ...αxn yn + βx0 1 y1 + ... + βx0 n yn
αhx, yi + βhx0 , yi
2.3 Vericando Algumas Propriedades de Rn
29
3. hx, xi = x21 + ... + x2n , como xi ∈ R, sabemos que x2i > 0, x 6= 0, o que implica em
x21 + ... + x2n = hx, xi > 0
Com isso concluímos que Rn é um Espaço de Hilbert. Em particular, para n = 1,
temos que R também é um Espaço de Hilbert. Veriquemos que Rn não pode ser um
Espaço de Hilbert com o mesmo produto interno do Rn . De fato, pelo mesmo motivo que
não pode ser Espaço de Banach com a norma Euclidiana, ou seja, no ítem 3, consideramos
x2 > 0, x 6= 0, porém já exemplicamos que isso não ocorre sempre nos Reais módulo
n. Logo, também não poderá ser um Espaço de Hilbert com tal produto interno. A
fortiori, Rn degenerado também não é Espaço de Hilbert, começando por nem mesmo ser
completo.
2.3.4.3 Uma Norma para Rn
Em um espaço métrico ou vetorial podemos ter mais de uma norma. Outras duas
famosas norma do Rn são norma da soma e a norma do máximo, entre muitas outras.
No entanto, sabemos que duas normas em R são equivalentes. Observando isso, qualquer
norma em Rn será equivalente a tais normas em R, pois também será uma norma de R.
O que indica que nosso conjunto não pode ser normado.
30
Parte II
Apêndices
31
APÊNDICE A -- Um Método Numérico
Alternativo
A.1 Introdução
Neste apêndice nós desenvolviremos e exploraremos um método numérico alternativo
para calcular os zeros de funções contínuas. Am de chegar razoavelmente mais rápido a
uma aproximação da raíz. Mas sobretudo, o objetivo apresentar o tal método alternativo
fazendo apenas uma rápia comparação com outro método bastante conhecido. Começaremos aplicando-o e faremos a demonstração de sua convergência no m da seção.
A.2 A Apresentação e Aplicação do Método
Seja a função f (x) = x3 + x − cos(x) uma função que possui raízes no intervalo [0, 1].
y
2
1.5
1
0.5
x
0
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
-0.5
-1
-1.5
-2
Figura 4: f (x) = x3 + x − cos(x)
2
2.5
3
3.5
A.2 A Apresentação e Aplicação do Método
32
Existe uma reta secante a f (x), usada no método das cordas para calcular zeros de
f. O seguinte método consiste em, primeiramente calcular a mesma reta proposta no
método das cordas e fazê-la passar pelo ponto médio do intervalo [a, b], no caso citado
acima, deve passar pela abscissa 0.5. Logo depois, acharemos uma perpendicular a essa
reta passando por um dos dois extremos do intervalo, dependendo das observações que
serão ainda feitas.
Logo, como f (0) = −1 e f (1) = 1.4596, então o coeciente angular m =
m =
f (1)−f (0)
1−0
f (b)−f (a)
b−a
⇒
⇒ m = 2.4596. Todavia, vamos fazer a reta secante passar pelo ponto
médio do intervalo, no caso: 0.5. Assim, y = mx + w ⇒ w = −mx, para y=0, logo
w = −2.4596 × 0.5 ⇒ w = −1.2298, portanto y = 2.4596x − 1.2298.
A perpendicular à reta secante encontrada deve passar por um dos extremos do intervalo, o que tiver com sinal diferente do zero, no caso, como o zero da reta é 0.5, a
perpendicular passará por b = 1, sabendo que o coeciente angular da perpendicular
1
é −m
= −0.406, sendo assim yp = − m1 x + k , para k =
1
x,
m
se yp = 0, sendo assim,
k = 0.406 × 1 ⇒ k = 0.406 e yp = −0.406x + 0.406.
y
y=2.4596x-1.2298
2
yp=-0.406x+0.406
1.5
1
0.5
x
0
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
-0.5
-1
-1.5
-2
f(x)=x³+x-cos(x)
Figura 5: A secante e a sua perpendicular
Veja que cada zero pode ser calculado pela intersecção das retas secante com a sua
perpendicular, a abscissa do ponto de intersecção será o xn :
y = yp ⇒ mx + wn = −
1
1
x + kn ⇒ mxn + xn = kn − wn ⇒
m
m
xn−1 =
m(kn − wn )
m2 + 1
(A.1)
A.2 A Apresentação e Aplicação do Método
Onde kn
33
e wn são dados por
wn = −mxn−1
kn =
1
xn−1 ± f (xn−1 )
m
(A.2)
E o sinal dependerá da conservação do sinal anterior da função, i.e., enquanto permanece com o mesmo sinal quando aplicada em xn , utiliza-se o sinal negativo, do contrário,
o sinal positivo. Observe que isso resultará em uma sequência de intervalos encaixados
1
do tipo In = [xn , xn ± f (xn )], que veremos com o desenvolvimento.
Sendo assim, aplicando a fórmula do xn para as duas primeiras equações, temos que
x0 =
2.4596(0.406+1.2298)
6.0496+1
⇒ x0 = 0.57, aplicando f (x0 ) = (0.57)3 + 0.57 − cos(0.57) temos
que f (x0 ) = −0.0868, que tem o mesmo sinal que f (0), portanto o novo intervalo será
[x0 , x0 − f (x0 )]=[0.57, 0.6567]. Calculemos assim k1
e w1 .
w1 = −2.4596 × 0.57 ⇒ w1 = −1.4 e k1 = 0.406 × 0.6567 ⇒ k1 = 0.2666
Portanto y1 = 2.4596x − 1.4
e yp1 = −0.406 + 0.2666. Lembramos que as equações
dessas retas apenas tem interesse no sentido do teste geométrico, uma vez que estamos
utilizando na sequência xn principalmente as variações dos coecientes lineares de tais
retas, podendo omitir a sua equação. Mas vamos estar inicialmente enunciando-as e
mostrando seu comportamento nos grácos como a seguir.
y
1
y1=2.4596x-1.4
0.5
x
0
-1.5
-1
-0.5
0
0.5
-0.5
1
1.5
yp1=-0.406x+0.2666
-1
Figura 6: Seguindo o processo
Antes de continuarmos, uma relevante observação deve ser feita: A convergência da
sequência xn para o zero da função será provada posteriormente, vale apenas no momento
1 Segundo
Elon (2006) [1], uma sequência An de intervalos é dita sequência de intervalos encaixados,
se são fechados e A1 ⊃ A2 ⊃ ... ⊃ An ⊃ ...
A.2 A Apresentação e Aplicação do Método
34
ressaltar que o critério de parada do processo se dá considerando o intervalo In = [xn , xn ±
f (xn )] quando a distância entre os extremos do intervalo for sucientemente pequena
quanto se queira, (| In |=
| f (xn ) |→ 0), ou seja, quando f (xn ) tender para zero. Como
podemos ver, aplicando a fórmula da sequência xn , temos que x1 = 1.666×0.3489 ⇒ x1 =
0.5815 e f (x1 ) = (0.5815)3 + 0.5815 − cos(0.5815) ⇒ f (x1 ) = −0.0575, como o sinal
de f ainda continua negativo no ponto x1 , usaremos o sinal negativo para determinar o
próximo intervalo que iremos trabalhar, a saber I1 = [x1 , x1 − f (x1 )] = [0.5815, 0.639].
Nesse intervalo vamos encontrar o x2 , mas para isso precisamos encontrar w2
e k2 ,
assim façamos então, usando (2):
w2 = −m × x1 ⇒ w2 = −2.4596 × 0.5815 ⇒ w2 = −1.43
k2 =
1
× (x1 − f (x1 )) ⇒ k2 = 0.406 × 0.639 ⇒ k2 = 0.2594
m
Seguindo, vamos encontrar x2 através de (1), mas antes deixemos a seguinte fração
constante já calculada para facilitar,
m
m2 +1
= 0.3489:
x2 = 0.3489 × (0.2594 + 1.43) ⇒ x2 = 0.5895
Agora encontremos f (x2 ) = (0.5895)3 + 0.5895 + cos(0.5895) ⇒ f (x2 ) = −0.037, e
por último, o intervalo In = [x2 ,
x2 − f (x2 )], o sinal negativo permaneceu porque o sinal
de f não mudou em x2 , logo I2 = [0.5895,
0.6265].
y
0.2
x
0
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
-0.2
-0.4
y=-0.406x+0.2594
-0.6
y=2.4596x-1.43
Figura 7: Terceira Iteração
A.2 A Apresentação e Aplicação do Método
35
Como já foi dito, mostraremos as duas equações das retas encontradas no intervalo I1 ,
são elas y2 = 2.4596x − 1.43
e yp2 = −0.406 + 0.2594, observe o gráco que mostrará
a intersecção dessas retas tal como das outras trabalhadas até então as quais dão origem
as coordenadas xn .
Usando o mesmo processo vamos encontrar x3
e I3 . Inicialmente vamos encontrar
w3 = −m × x2 ⇒ w3 = −2.4596 × 0.5895 ⇒ w3 = −1.45 e k3 =
1
(x2
m
− f (x2 ) ⇒ k3 =
0.406 × 0.6265 ⇒ k3 = 0.2544
Assim podemos utilizar (1) para encontrar x3 :
x3 = 0.3489 × (0.2544 + 1.45) ⇒ x3 = 0.5947
Logo encontramos f (x3 ) = (0.5947)3 + 0.5947 − cos(0.5947) = −0.0233 e
I3 =
0.618]. Por último, as equações das retas que determinam os extremos desse
[0.5947,
intervalo que tem como intersecção x3 , são elas y2 = 2.4596x − 1.45
e yp2 = −0.406 +
0.2544, vejamos o gráco.
0.1
0.05
x
0
0.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
-0.05
-0.1
y=-0.406x+0.2544
-0.15
y=x^3+x-cos(x)
y=2.4596x-1.45
Figura 8: Quarta Iteração
No momento temos que | I3 |, (que por sinal é =| f (x3 ) |), ainda não é suciente
pequeno para que x3 seja uma boa aproximação da raíz da função. Portanto continuemos
com o processo tentando chegar em uma boa aproximação.
w4 = −2.4596 × 0.5947 ⇒ w4 = −1.4627
A.2 A Apresentação e Aplicação do Método
36
k4 = 0.406 × 0.618 ⇒ k4 = 0.25
Logo x4 = 0.3489 × (0.25 + 1.4627) ⇒ x4 = 0.5976, as equações são y4 = 2.4596x −
1.4627 e yp4 = −0.406x + 0.25, observe.
0.04
0.02
x
0
0.5
0.52
0.54
0.56
0.58
0.6
0.62
0.64
0.66
0.68
0.7
0.72
0.74
-0.02
-0.04
y=x^3+x-cos(x)
y=-0.406x+0.25
-0.06
y=2.4596x-1.4627
-0.08
Figura 9: Quinta Iteração
Vejamos se a solução já é satisfatória. Observe que o gráco da função está assemelhandose a uma reta por termos aproximado bastante a imagem a m de denirmos as equações
gracamente. De fato, calculemos o valor da função em x4 .
f (x4 ) = (0.5976)3 + 0.5976 − cos(0.5976) ⇒ f (x4 ) = −0.0156
Como | I4 |=| f (x4 ) |= 0.0156, temos que x4 em cinco interações é uma aproximação
razoável do zero de f .
Se usarmos o M.M.I. 2 ,veremos que com 5 iterações a aproximação não é tão razoável
quanto essa. Vejamos em 6 iterações:
w5 = −2.4596 × 0.5976 = −1.4699 e k5 = 0.406 × 0.6132 = 0.2489
x5 = 0.3489 × (0.2489 + 1.4699) ⇒ x5 = 0.5997
O f (x5 ) = (0.5997)3 + 0.5977 − cos(0.5979) ⇒ f (x5 ) = −0.0102, o que indica que
| I5 |= 0.0102. Essa aproximação pode ser determinado por um δ arbitrário, nesse caso
2 Método
do Meio Intervalo ou da Bissecção
A.3 Alguns Detalhes Importantes Para Mostrarmos a Convergência
37
0.1
x=0.5997
0.05
0
0.3
x
0.35
0.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
-0.05
y=-0.406x+0.2489
-0.1
y=2.4596x-1.4699
-0.15
y=x^3+x-cos(x)
Figura 10: Aproximação da Sexta iteração
poderíamos adotar δ = 0.02, mas não deve ser confudido com o número que corresponde
a distância dessa aproximação com o zero da função. Com efeito, usando qualquer software matemático para traçar grácos que encontre os zeros das funções, (Winplot, por
exemplo), ele nos dá que o zero da função que estamos trabalhando é 0.60352 aproximadamente, portanto, a distância entre o zero e x5 é 0.00382, ainda menor que os nosso | I5 |.
Já no M.M.I., x5 = 0.609375 que não é uma aproximação tão boa, basta calcularmos a
distância entre o x5 do M.M.I e a raíz dada no software
Mostramos gracamente, na Figura 7, apenas as duas últimas retas e a proximidade
da abscissa da intersecção com a raíz de f .
A.3 Alguns Detalhes Importantes Para Mostrarmos a
Convergência
Vamos agora mostrar a convergência da sequência xn , em funções contínuas, para o
zero da função, ou melhor, da sequência dos intervalos In , os quais todos Ii contém uma
raíz da função por construção. Mas para isso vamos dar algumas denições e enunciar
alguns teoremas que nos serão necessários para a mostrarmos tal convergência.
Denição A.1 (Intervalos Encaixados) . Uma sequência An de intervalos é dita sequência de Intervalos Encaixados, se são fechados e A1 ⊃ A2 ⊃ ... ⊃ An ⊃ ...
A.4 A Convergência da Sequência
38
Logo segue o seguinte Teorema.
Teorema A.1 (Teorema dos Intervalos Encaixados) . Seja I1 ⊃ I2 ⊃ ... ⊃ In ⊃ ...
uma sequência de intervalos limitados e fechados In = [an ,
bn ]. A intersecção
∞
\
In 6= ∅.
n=1
Isto é, existe pelo menos um x pertencente a todo Ii para todo i ∈ R, podendo ser um
T
intervalo In = [a, b], onde pode ocorrer a = b.
Teorema A.2 (Teorema do Valor Intermediário) . Seja f : [a,
Se f (a) < d < f (b) então existe c ∈ (a,
b] → R contínua.
b) tal que f (c) = d.
Teorema A.3 (Teorema de Bolzano-Weierstrass) . Toda sequência monótona limitada é convergente.
Ainda enunciaremos um Corolário, porém é indispensável que enunciemos o Teorema
do qual ele é consequência.
Teorema A.4 . Seja f : X → R contínua. Se X é compacto então f (X) é compacto.
Corolário A.1 (Weierstrass) . Toda função contínua f : X → R denida num compacto X é limitada e atinge seus extremos (i.e., existem x1 , x2 ∈ X tais que f (x1 ) ≤
f (x) ≤ f (x2 ) para todo x ∈ X )
A.4 A Convergência da Sequência
Por construção temos duas armações: Os intervalos são encaixados e os extremos
têm sinais distintos. Logo pelo Teorema dos Intervalos Encaixados, existe x que pertence a
∞
\
In = [a, b]. Podemos considerar, sem perda de generalidade, f (a) < 0 < f (b), logo pelo
n=1
Teorema do Valor Intermediário, temos que existe x ∈ [a, b], tal que, f (x) = 0. Devemos
considerar um intervalo I0 que contenha a raíz encontrada pelo Método da Localização
dos Zeros
3
. Como a sequência (xn ) é limitada por um intervalo fechado, pois {xn } ⊂ I0 ,
logo {xn } possui ínmo e supremo. Pelo Corolário de Weiertrass, se f é contínua e
está denido em um intervalo fechado, então f (xn ) também possui máximo e mínimo no
intervalo, e mais, a imagem de f é um intervalo fechado, de acordo com o Teorema que
3 Todos
os métodos numéricos aqui citados podem ser encontrados em Cálculo Numérico com Matlab
de Flaulles Boone Bergamaschi (2005) [2].
A.4 A Convergência da Sequência
39
precede o Corolário A.1. (Poderíamos também ter usado: conjunto compacto em lugar de
intervalo fechado, uma vez que os intervalos fechados são os compactos da reta). Veja que
a sequência | (f (xn )) | é limitada pelo intervalo [f (x0 ), 0], e é decrescente, pelo Teorema
de Bolzano-Weiertrass, uma sequência monótona e limitada é convergente, e mais, no caso
de decrescente, converge para o ínmo, daí temos que | (f (xn )) |→ 0, consequentemente
∞
\
In → xn , uma vez que In = [xn , xn ±f (xn )], por outro lado, vimos que todo intervalo
n=1
In contém a raíz x, logo a = b,
x ∈ [a, b] ⇒ a = b = x, consequentemente (xn ) → x.
40
APÊNDICE B -- Uma Outra Fórmula para Yv
da Função Quadrática
B.1 Introdução
O seguinte apendice trata, primeiramente, da utilização da fórmula tradicional do
∆
. Ora, essa fórmula diculta
vértice da parábola, em relação à sua imagem; yv = − 4a
a manipulação do vértice em função do coeciente principal, uma vez que as raízes já
são conhecidas, diferentemente de encontrar parábolas congruentes, como classica [13];
justicativa que será enunciada no desenvolvimento. Sabendo que, além de parábolas
congruentes, temos famílias de parábolas, desenvolveremos uma fórmula para o yv , pela
qual têm-se raízes xas, coeciente principal como variável independente e o próprio yv
variando dependentemente. A aplicação se estende desde a matemática nanceira, até a
eletrônica, contudo não é nosso objetivo destacar exemplos de aplicações, e sim apresentar
2
2)
a dedução de yv = − a(x1 −x
, a partir das relações de Girad e da fórmula tradicional.
4
Ressaltando que a equação de 2◦ grau era problema dos babilônios desde a antiguidade.
B.2 A Função Denida Pelo Polinômio de 2o grau
Começando por enunciar que uma função denida pelo polinômio de 2◦ grau, tem
como gráco uma parábola; quanto o leitor pode consultar [11]. Utilizaremos, para o
gráco de uma função quadrática: a(s) sua(s) raiz(es) reais, se existirem; o vértice que
será discutido no decorrer do artigo e a intersecção com Oy.
Antecipadamente a essa discussão, devemos observar o modelo pelo qual se apresenta
a função quadrática: f (x) = ax2 +bx+c, inclusive ressaltar duas importantes observações:
sua dependência da equação de 2◦ grau, ax2 + bx + c = 0; e o fato de ser descrita como
um polinômio. No caso temos o que chamamos de trinômio (um tipo de polinômio em
particular). Sem demorarmo-nos em tal questão, vamos denir o que é um polinômio.
B.2 A Função Denida Pelo Polinômio de 2o grau
41
Em [15], dene-se os polinômios como a innite formal sum 1 , também as funções
polinomiais. entre outras, essa é a que mais nos interessa, e pode ser descrita desta forma:
P∞
i
n
i=0 ai x = a0 + a1 x + ... + an x + ..., onde ai ∈ A e x é uma indeterminada, sendo que
ai = 0, para todo i > n; e , A um anel qualquer, (boa noção de anéis e corpos encontrada
em Domingues e Iezzi [3]). Já está denido o polinômio, mas não a função polinomial.
Também algebricamente, e na mesma fonte acima citada, podemos encontrar uma boa
denição sobre função polinomial sobre um corpo. Diz-se que um elemento φ ∈ F F é uma
função polinomial sobre F , se existir f (x) ∈ F (x) tal que aφ = f (a), ∀ ∈ F , sendo F um
corpo e F F o conjunto de todas as funções de F em F , se, por exemplo, trabalharmos
com o conjunto dos reais, podemos chamar de R ao invés de F .
Denido os polinômio e a função polinomial; estamos cientes de que a função quadrática
está introduzida em todas as particularidades da função polinomial. A primeira, e mais
interessante para nós, é o zero da função, que encontraremos ao resolvermos uma equação
do tipo: f (x) = 0, sabendo que terá o mesmo grau do polinômio. No caso da função
quadrática que por sua vez recai numa equação de segundo grau ax2 + bx + c = 0, quando
deseja-se encontrar as raízes, temos a famosa fórmula de Bhàskara: x =
√
−b± ∆
,
2a
onde
∆ = b2 − 4ac, ou o método das relações de Girad para determiná-las. Se tivermos as
raízes, o vértice, e a intersecção com o Oy; traçamos o gráco da função quadrática; ainda
que temos consciência que para traçar a parábola é suciente termos três pontos, desde
que pelo menos um deles esteja separado pelo eixo de simetria. O primeiro passo já foi
dado, agora vamos partir para a intersecção com o eixo y, na qual sem rodeios pode-se
armar que a parábola corta eixo y quando x = 0, ou seja, se f (x) = ax2 + bx + c,
f (0) = c; concluímos que o ponto (0 , c) é intersecção com o eixo y. Por enquanto já
podemos até dar uma boa idéia de como cará a parábola, apenas se a equação tiver duas
raízes distintas, ou seja, ∆ > 0. Vejamos:
No gráco da função acima, temos apenas as raízes e a intersecção com eixo y. Porém,
poderíamos traçar esse gráco se a equação não possuísse raízes reais? Ou, se possuísse
apenas uma raiz? Ou seja, ∆ = 0 ou ∆ < 0. Sim, o vértice, e /ou um auxiliar, nos
possibilita assim fazer. Em qualquer livro contendo o assunto, encontramos a seguintes
b
ou xv =
fórmulas para o vértice: xv = − 2a
x1 +x2
,
2
onde x1 e x2 são as raízes da equação, e
∆
para o yv = − 4a
. Logo V(xv ,yv ) é o ponto que determina o vértice da função. Discutiremos
apenas algebricamente sobre a última fórmula.
O primeiro questionamento é: se temos uma formula para xv , em função das raízes, e
1 Uma
soma formal innita
B.3 Dedução da fórmula para yv
42
y
4
3
2
1
x
0
-7
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
7
-1
-2
-3
-4
Figura 11: y = x2 + 2x − 3
isso nos dá uma boa característica da parábola, a possibilidade de reparti-la igualmente
com o eixo de simetria; porque não pensarmos em uma fórmula similar para o yv , mesmo
que não venha a trazer à tona características tão interessantes? Outro argumento, é a
facilidade que se torna o cálculo, se as raízes já estivem exibidas sem usar primeiramente
a fórmula de Bhàskara. Ainda podemos citar algo mais que cará para o decorrer do
desenvolvimento, por possibilitar o uso mais amplo na representação gráca.
B.3 Dedução da fórmula para yv
Nossas hipóteses consistem em:
yv = −
∆
4a
(B.1)
onde ∆ = b2 − 4ac.
E as Relações de Girad 2 ,
x1 + x 2 = −
b
a
e x 1 x2 =
c
a
onde x1 e x2 são as raízes da equação. Logo, de B.2, temos
2 Essas
relações podem ser encontradas em [16] ou [12]
(B.2)
B.4 Aplicação
43
b = −a(x1 + x2 ) e c = x1 x2
(B.3)
Primeiramente, vamos escrever ∆ em função de x1 e x2 , pela fórmula de ∆ de Bhàskara
B.1 e B.3:
∆ = b2 − 4ac = [−a(x1 + x2 )]2 − 4aax1 x2
= a2 (x1 + x2 )2 − 4a2 x1 x2
= a2 [(x1 + x2 )2 − ax1 x2 ]
= a2 (x21 + 2x1 x2 + x22 − 4x1 x2 )
= a2 (x21 − 2x1 x2 + x2 )
∆ = a2 (x1 − x2 )2
(B.4)
∆
Como yv = − 4a
, então, de B.1 e B.4
a2 (x1 − x2 )2
yv = −
4a
a(x1 − x2 )2
yv = −
4
(B.5)
B.4 Aplicação
Eis uma outra forma para calcular o vértice relativo à imagem da parábola. Como
exemplo, vamos calcular o vértice da função exibida no gráco da FIGURA 11, usando
os dois métodos. Considerando que já conhecemos tanto as raízes quanto a função, temos
que se y = x2 + 2x − 3, podemos assim calcular a coordenada yv :
∆ = 22 − 4.1.(−3) ⇒ ∆ = 4 + 12 ⇒ ∆ = 16 ⇒ yv = − 16
⇒ yv = −4
4
Por B.5, conhecendo as raízes expostas no gráco, ou encontradas pelos métodos de
Girad ou soma e produto, temos que:
2
2
2)
x1 = −3; x2 = 1 e a=1 ⇒yv = − a(x1 −x
⇒ yv = − 1(−3−1)
⇒ yv = − 16
⇒ yv = −4
4
4
4
B.4 Aplicação
44
B.4.1 Dedução para Raízes Complexas
Observe que obtemos a mesma solução, porém, nada tão vantajoso, a menos das contas, já que as raízes foram antecipadamente exibidas. Precisamos destacar a importância
que também se aplica para raízes imaginárias, uma vez que possui gráco sendo parábola
quadrática, o vértice certamente é um número real, ou seja, basta vericar se o elemento
contido no parêntese é um número real, como nos mostra o seguinte encadeamento:
Sendo
x1 = m + ni e x2 = m − ni,
sendo m a parte real e n a parte imaginária do número complexo, onde x1
(B.6)
e x2 são
as raízes da função, conseqüência de Bhàskara.
Substituindo B.6 em (x1 − x2 )2 , temos:
(x1 − x2 )2 = (m + ni − (m − ni))2 = (m + ni − m + ni)2 = (2ni)2 = 4n2 i2 = −4n2 (B.7)
De B.7 e B.5 temos:
yv = −
a(−4n2 )
⇒ yv = an2
4
(B.8)
O teste em relação a eciência de B.8 poderá car por conta do leitor.
B.4.2 Aplicação no Exemplo Anterior
Contudo desejamos apresentar aqui, algo além da fórmula yv , tornemos a considerá-la
uma função, cuja variável dependente é o yv e a independente é o coeciente . Observemos
que o vértice mudará na medida que o coeciente dominante3 variar. Tal fato nos concede
mais que uma família de parábolas adquiridas com a variação do termo independente
(FIGURA 12), ou parábolas do tipo f (x) = ax2 (FIGURA 12), com a mudança do valor
do coeciente dominante.
3 Termo
principal.
usado por Hygino e Iezzi em [3], se referindo ao que chamávamos, vulgarmente, de coeciente
B.4 Aplicação
45
y
0.8
0.6
0.4
0.2
x
0
-1.5
-1
-0.5
0
0.5
1
1.5
-0.2
-0.4
-0.6
-0.8
y
3
2
1
x
0
-7
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
7
-1
-2
-3
Figura 12: Parábolas com mesmo coeciente dominante e Família de Parábolas
Fixaremos as duas raízes e induziremos a variação de seu vértice; (claro que se as raízes
estão xas xv não mudará). Concluindo assim que devemos fazer yv variar; contudo isso
não será difícil, levando em conta que já apontamos o centro de nossa discussão como
2
2)
,
podendo considerar yv uma função. Vejamos em termos algébricos: yv = − a(x1 −x
4
sabendo que, se alterarmos o coeciente dominante, teremos que multiplicar toda a função
pela razão que o alterou, para que não se alterem as raízes e não ra nossa intenção.
Exemplo: y = x2 + 2x − 3, é um exemplo que foi trabalhado mais acima, testamos e
2
vimos que tem yv = −4; todavia deseja-se alterá-lo para yv = 1 ⇒ 1 = − a(−1−3)
⇒
4
1 = − 16a
⇒ a = − 14 ; para isso, precisamos multiplicar toda a equação pelo mesmo valor
4
que fez a requerida mudança do coeciente, no caso o próprio − 41 , no caso geral, por
a0
,
a
B.4 Aplicação
46
onde a0 e a são os coecientes dominantes atual e o antigo, respectivamente. Podemos
então, observar a construção gráca com tal noção (FIGURA 13). E aqui chamaremos
esse conjunto de parábolas de: parábolas co-simétricas co-radiproporcionais, por terem
vértices proporcionais aos coecientes dominantes , mesmas raízes, e conseqüentemente,
mesmo eixo de simetria.
y
y=x^2-4
y=(3/4)x^2-3
y=(1/2)x^2-2
y=(1/4)x^2-1
y=-x^2+4
y=-(3/4)x^2+3
y=-(1/2)x^2+2
y=-(1/4)x^2+1
3
2
1
x
0
-7
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
7
-1
-2
-3
Figura 13: Parábolas Co-simétricas Co-radiproporcionais
B.4.3 O Caso de Raíz Única
"Se xarmos as raízes...", observe que a função com uma única raiz, tem como xv o
próprio zero da função; o que signica que se xamos a raiz, não podemos manipular o
vértice, e se mudamos o vértice, não estamos xando a raiz, paradoxalmente a esse tipo
de aplicação da fórmula B.5. Se a raíz for complexa, temos a impossibilidade de xação
no plano cartesiano. Todavia, esses problemas não eximem a utilização das duas outras
formas de calcular o vértice V aqui; apenas, diferentemente de funções com dois zeros
distintos, a função com apenas um zero, não representam parábolas co-simétricas co-
radiproporcionais, apenas co-simétricas co-radicandas, FIG. 3. Porém é claro que funções
de uma raiz dupla apresentam a característica de possuírem vértice apenas sobre o eixo
da abscissa, podemos também mostrar tal fato usando B.5.
Seja x1 = x2 ,
2
2
2
2)
1)
yv = − a(x1 −x
⇒ yv = − a(x1 −x
⇒ yv = − a04 ⇒ yv = 0. Observe
4
4
que os casos citados logo acima, dizem respeito as parábolas sob manipulação de vértice.
Outra justicativa importante, a respeito da possibilidade de obter pelo menos uma
B.4 Aplicação
47
intersecção com Oy, seria necessário que o gráco da função superior tivesse a concavidade
mais aberta que o gráco da função inferior, ou mesmo vértice. Sabendo que quanto maior
o módulo do coeciente dominante, mais fechada é a concavidade, podemos observar que,
numa função de raízes complexas, se mudarmos o vértice, elas não se interceptam, pois
terá maior módulo, e cará dentro da outra parábola, e se com menor módulo, ela conterá
a primeira. Sabendo que não é uma família, podendo também utilizar a equação B.8 e
visualizar no gráco. Contudo, também são parábolas co-simétricas co-radiproporcionais,
por terem coeciente dominante e yv proporcionais da seguinte forma:
yv
yv
yv
= 1 = ... = n
a
a1
an
(B.9)
B.4.4 Aplicação com Raízes Complexas
Apesar de não podermos ver gracamente as coincidências das raízes, sabemos que
têm mesmos zeros. E as mesmas justicativas consideradas para as funções com dois zeros
distintos e reais, também podem ser aceitas neste caso de raízes complexas no que diz
respeito a classicação. Podemos apresentá-las assim como nos mostra a FIGURA 14:
y
14
12
10
8
6
y=x^2+3x+4
y=(8/7)(x^2+3x+4)
y=(20/7)(x^2+3x+4)
y=4(x^2+3x+4)
4
2
x
0
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
Figura 14: Parábolas Co-simétricas Co-radiproporcionais com Raízes Complexas
Podemos também traçar um gráco análogo abaixo do eixo x, lembrando que a
denição das proporcionais diz respeito ao módulo de a, por isso também será válida
a análise acima.
B.5 Mais Aplicações Geométricas
48
B.5 Mais Aplicações Geométricas
Podemos também, ao invés de xar as parábolas sobre o eixo x, podemos xar sobre
uma reta qualquer. Vamos apenas mostrar gracamente mostrando as equações que
geraram tais grácos.
y
5
4
3
2
y=x^2-4x+3
y=(3/4)x^2-3x+3
y=(1/2)x^2-2x+3
1
y=3
x
0
-4
-3
-2
-1
0
1
2
3
4
5
6
7
8
9
10
-1
Figura 15: Parábolas Fixas numa Reta
No caso acima, apenas ultilizamos a reta x = 3 ao invés de x = 0 como estávamos
fazendo anteriormente. O que implica em resolver uma equação f (x) = 3 ao lugar da
f (x) = 0, assim segue igualmente todos os outros processos. Vejamos agora o caso de
xar sobre uma reta inclinada.
y
8
6
4
y=(2/3)x^2-(7/3)x+3
y=(5/6)x^2-(19/6)x+3
y=(1/3)x^2-(2/3)x+3
y=(1/2)x^2-(3/2)x+3
y=x^2-4x+3
x
2
y=x+3
0
-6
-4
-2
0
2
4
6
8
10
12
Figura 16: Parábolas Fixas numa Reta Inclinada
No caso acima, apenas ultilizamos a reta y = x + 3 ao invés de x = 0 como estávamos
B.6 Motivação Filosóca
49
fazendo anteriormente. O que implica em resolver uma equação f (x) = x + 3 ao lugar
da f (x) = 0, assim segue igualmente todos os outros processos. Vejamos agora o caso de
xar sobre uma reta inclinada. Porem os vértices não cam alinhados nesse caso.
B.6 Motivação Filosóca
Porquanto já podemos considerar suciente a aplicação algébrica da fórmula, podemos passar a citar a parte mais concreta de sua aplicação. Relatemos algumas de suas
aplicações algum modo. Pois não é de objetivo principal oferecer aplicação, conhecendo a
beleza de matemática por matemática, reconhecida pelo lósofo Descartes em [17], página
234 , que diz: "[...] as matemáticas têm invenções sutilíssimas e podem servir muito,
tanto para satisfazer os curiosos, como para facilitar todas as artes e diminuir trabalho
aos homens [...]". A parábola, como também os outros grácos de funções, é consideravelmente utilizada nos ramos da matemática nanceira, funções demanda e oferta de
mercado, preço e quantidade de equilíbrio, função lucro ou prejuízo de uma empresa, (receita total), [14]. Além de outras características com perspectivas eletrônicas, como é o
caso, do farol de carro, antena parabólica (como o próprio nome já diz), radares, além do
lançamento oblíquo e o movimento uniformemente variado, que no caso da física5 ; estes
estão entre muitos outros fatos e aplicações.
4 René
Descartes
5 http://pessoal.sercomtel.com.br/matematica/fundam/eq2g/quadratica.htm
50
Referências
[1] LIMA, Elon Lages. Curso de Análise vol.1. Ed. Projeto Euclides. Rio de Janeiro,
2006.
[2] BERGAMASCHI, Flaulles Boone. Cálculo Numérico com Matlab. Vitória da
Conquista, 2005.
[3] DOMINGUES, Hygino H.; Iezzi, Gelson. Álgebra Moderna 2 ed.. Ed. Atual. São
Paulo, 1982.
[4] LANG, Serg. Álgebra Linear. Ed. Ciência Moderna. Rio de Janeiro, 2003.
[5] GONÇALVES, Adilson. Introdução à Álgebra. Ed. Projeto Euclides. Rio de
Janeiro, 2005.
[6] LIMA, Elon Lages. Análise Real. Ed. IMPA. Rio de Janeiro, 2004.
[7] GELBAUM, Bernard R.; OLMSTED, John M.H.. Counterexamples in Analysis.
Ed. Holden-Day, Inc. San Francisco, 1965.
[8] LIMA, Elon Lages. Espaços Métricos. Ed. Projeto Euclides. Rio de Janeiro, 2005.
[9] RUDIN, Walter. Princípios de Análise Matemática. Ed. Livro Técnico e Ed.
Universidade de Brasília. Rio de Janeiro, 1971.
[10] LIMA, Elon Lages. Análise no Espaço Rn . Ed. IMPA. Rio de Janeiro, 2002.
[11] DANTE, Luiz Roberto. Matemática: Ensino Médio. Ed. Ática. São Paulo, 2004.
[12] DANTE, Luiz Roberto. Matemática: contexto e aplicações. Vol. 3. Ed. Ática.
São Paulo, 2002.
[13] ELON, Lajes lima; CARAVALHO, Paulo Cezar Pinto; WAGNER, Eduardo; MORGADO, Augusto Cesar. A Matemática do Ensino Médio. Vol. 1. ed. 2. Ed.
Sociedade Brasileira de Matemática. Rio de Janeiro, 1997.
[14] SILVA, Sebastião Medieros. Matemática para cursos de Economia, Administração, Ciências Contábeis 5. ed.. Ed. Atlas. São Paulo, 1999.
[15] FRALEIGH, John B. A First Course In A Abstract Algebra. Ed. AddisonWesley Publishing Company. Massachusetts, 1968.
[16] GIOVANNI, José Ruy; GIOVANNI JR, José Ruy; BONJORNO, José Roberto.
Matemática Fundamental, 2◦ grau, vol. Único. Ed. FTD. São Paulo, 1994.
[17] DESCARTES, René. Discurso do Método. Editora Martin Claret, São Paulo,
2003.