")
Física moderna I - Parte A
A TEORIA DA RELATIVIDADE
M.C. Baldiotti
April 10, 2014
Contents
1 As nuvens negras da física
4
2 Noções de relatividade especial
2.1 Velocidade de propagação das interações . . . . . . . .
2.2 A mecânica de Newton e Galileu . . . . . . . . . . . .
2.2.1 Distinguindo a física da matemática . . . . . .
2.2.2 Um pouco de notação . . . . . . . . . . . . . .
2.2.3 O eletromagnetismo e as TG . . . . . . . . . .
2.3 O experimento de Michelson e Morley (1887) . . . . .
2.4 As transformações de Lorentz . . . . . . . . . . . . . .
2.5 A relatividade de Einstein . . . . . . . . . . . . . . . .
2.5.1 Primeiro postulado . . . . . . . . . . . . . . . .
2.5.2 Segundo postulado . . . . . . . . . . . . . . . .
2.5.3 O segundo postulado e as TL . . . . . . . . . .
2.6 Sobre o tempo . . . . . . . . . . . . . . . . . . . . . .
2.7 Simetria das transformações . . . . . . . . . . . . . . .
2.8 Sobre o espaço . . . . . . . . . . . . . . . . . . . . . .
2.9 Simultaneidade . . . . . . . . . . . . . . . . . . . . . .
2.10 Sincronização de relógios e observação . . . . . . . . .
2.11 Efeito Doppler . . . . . . . . . . . . . . . . . . . . . .
2.12 Aberração . . . . . . . . . . . . . . . . . . . . . . . . .
2.13 Adição de velocidades . . . . . . . . . . . . . . . . . .
2.13.1 Diagrama espaço-tempo e os tipos de intervalos
2.13.2 O arrasto do éter . . . . . . . . . . . . . . . . .
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6
6
6
9
11
14
15
19
20
22
23
25
27
31
34
37
43
47
50
52
54
59
2.13.3 Rigidez e elasticidade . . . . . . . . . . . . . . . .
2.14 Vetores . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.14.1 Tensores . . . . . . . . . . . . . . . . . . . . . . . .
2.15 Rotações . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.16 Métrica . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.17 O espaço de Minkowski . . . . . . . . . . . . . . . . . . .
2.17.1 Notação . . . . . . . . . . . . . . . . . . . . . . . .
2.17.2 Grupo de Lorentz . . . . . . . . . . . . . . . . . .
2.17.3 Transformações de Lorentz numa direção arbitrária
2.18 Minudências matemáticas . . . . . . . . . . . . . . . . . .
2.18.1 Grupo . . . . . . . . . . . . . . . . . . . . . . . . .
2.18.2 Pseudo-métrica . . . . . . . . . . . . . . . . . . . .
2.19 Mecânica relativística . . . . . . . . . . . . . . . . . . . .
2.19.1 Tempo próprio . . . . . . . . . . . . . . . . . . . .
2.19.2 Quadrivetor velocidade . . . . . . . . . . . . . . .
2.19.3 Momento relativístico . . . . . . . . . . . . . . . .
2.19.4 Energia relativística . . . . . . . . . . . . . . . . .
2.19.5 Mais do mesmo . . . . . . . . . . . . . . . . . . . .
2.19.6 Fissão e fusão . . . . . . . . . . . . . . . . . . . . .
2.19.7 Fótons . . . . . . . . . . . . . . . . . . . . . . . . .
2.20 Dinâmica relativística . . . . . . . . . . . . . . . . . . . .
2.21 Lei de transformação das forças . . . . . . . . . . . . . . .
2.21.1 Exemplo 1 . . . . . . . . . . . . . . . . . . . . . . .
2.21.2 Exemplo 2 . . . . . . . . . . . . . . . . . . . . . . .
2.21.3 Espalhamento Compton . . . . . . . . . . . . . . .
2.22 Mais um pouco sobre notações . . . . . . . . . . . . . . .
2.23 Gradiente em 4D . . . . . . . . . . . . . . . . . . . . . . .
2.23.1 Levantamento e abaixamento de índices . . . . . .
3 Eletrodinâmica relativística
3.1 Conservação da carga . . . . . . . . .
3.1.1 Transformação das densidades
3.2 Transformação dos campos . . . . . .
3.3 Tensor do campo eletromagnético . . .
3.4 Invariância de gauge . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
61
62
65
66
69
72
75
78
81
85
85
86
87
90
93
93
97
99
101
104
106
110
112
114
118
122
123
125
.
.
.
.
.
126
126
127
129
134
139
4 As
4.1
4.2
4.3
4.4
equações de Maxwell
Outra aproximação . . . . . . . . . . . . .
Ainda sobre as equações não-homogêneas
Invariantes do campo eletromagnético . .
Gauge de Lorentz . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
140
144
146
147
148
5 Força de Lorentz
150
6 Noções de relatividade geral
6.1 Métrica . . . . . . . . . . . . . .
6.2 Espaço tangente e vetores . . . .
6.2.1 Lei de transformação . . .
6.3 Conexões e a derivada covariante
6.4 Regra de Leibniz . . . . . . . . .
6.5 Símbolo de Christo¤el . . . . . .
.
.
.
.
.
.
152
157
159
160
162
166
168
7 A geometria da relatividade
7.1 Equação da geodésica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Tensor de energia e momento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3 Equações de Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
171
173
179
184
A Noções de cálculo vetorial
A.1 Campo vetorial . . . . . . . . . . . . . . . . . . .
A.2 Fluxo . . . . . . . . . . . . . . . . . . . . . . . .
A.3 Divergente . . . . . . . . . . . . . . . . . . . . . .
A.3.1 Teorema de Gauss . . . . . . . . . . . . .
A.3.2 O divergente em coordenadas cartesianas
A.4 Integrais de linha . . . . . . . . . . . . . . . . . .
A.5 O rotacional de uma função . . . . . . . . . . . .
A.5.1 Teorema de Stokes . . . . . . . . . . . . .
A.5.2 Lei de Ampère . . . . . . . . . . . . . . .
A.5.3 Rotacional em coordenadas cartesianas .
A.6 O operador Nabla . . . . . . . . . . . . . . . . .
A.7 Teoremas Fundamentais do Cálculo Vetorial . . .
A.8 Teorema de Green . . . . . . . . . . . . . . . . .
190
190
191
192
194
195
196
198
200
200
201
204
207
209
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
As nuvens negras da física
No inicio do século XX a Física apresentava um cenário, no mínimo, perfeito. O ferramental matemático
desenvolvido desde os trabalhos de Newton e os subseqüentes desenvolvimentos da Mecânica Analítica,
parecia su…ciente para descrever o comportamento de todos os corpos na natureza. Em seguida, o desenvolvimento da Mecânica Estatística permitiu generalizar estes conceitos para o caso de um número
(praticamente) in…nito de corpos. Dando com isso uma base formal a (praticamente) todo o desenvolvimento fenomenológico da Termodinâmica. Somado a tudo isso temos o ferramental desenvolvido para a
Mecânica dos Fluidos e a brilhante aplicação deste ferramental na descrição de fenômenos eletromagnéticos,
ou seja, temos a teoria de Maxwell do eletromagnetismo. Obviamente cada um destes ramos da Física
se desdobrava numa in…nidade de outros que envolviam seus próprios ferramentais e conceitos. Mas sob
a sombra destas teorias repousava um universo completamente conhecido, cuja determinação de qualquer
evento, passado ou futuro, era apenas uma questão de medidas precisas e poder computacional.
Foi neste cenário que em 1900 Lord Kelvin (Sir William Thomson) apresentou uma palestra1 com o objetivo de dar um panorama geral do estado da Física na época. Nesta palestra ele a…rma que as teorias da física
haviam chegado a um nível tão grande de so…sticação (englobando as mais diversas áreas da matemática),
consistência e sucesso, que, a menos do que ele chamou de duas “nuvens negras”, a Física seria uma teoria
prestes a ser “terminada”2 . Ou seja, assim que estas nuvens se dissipassem, o que ele acreditava que não
tardaria, as teorias físicas existentes seriam capazes de descrever com perfeição (e, conseqüentemente, fazer
todas as previsões) para qualquer fenômeno da natureza (tomando-se em conta, obviamente, a di…culdade
computacional de sistemas complexos). As “nuvens negras” apontadas por Kelvin são:
1. Na termodinâmico: A violação do Teorema da Eqüipartição de Energia para baixas temperaturas e
a catástrofe do ultra-violeta para altas temperaturas.
Pelo Teorema da Eqüipartição de Energia, um sistema em equilíbrio termodinâmico com n graus
de liberdade teria a energia média hEi,
1
KT ; n 2 N :
2
hEi = n
Na descrição do comportamento de um gás, podemos calcular a variação da energia com a temperatura
@ hEi
=n
@T
1
K = CV ;
2
que é o calor especí…co (a volume constante). Classicamente, este seria o comportamento esperado para
baixas temperaturas (próximas ao zero absoluto). Entretanto, experimentalmente observa-se que, para
temperaturas extremamente baixas, o calor especí…co tende a zero. Na verdade, a discrepância
1 From a 1900, April 27, Royal Institution lecture. Lord Kelvin, Nineteenth Century Clouds over the Dynamical Theory of
Heat and Light, Philosophical Magazine, Sixth Series, 2, 1–40 (1901).
2 Na verdade Jeans já havia dito algo semelhante sobre o problema do calor especí…co.
4
entre a previsão clássica e os experimentos já haviam sido observados por Maxwell em 1859. Além
disso, para o caso da descrição de fótons em uma cavidade, ou a radiação do corpo negro, o resultado
acima diz que a energia média dos fótons é independente da freqüência. Assim, se ( ) é a
densidade de fótons com uma certa freqüência a densidade de energia da cavidade seria
E (T; ) = hEi ( ) =
1
KT ( ) :
2
Usando agora que as ondas na cavidade são estacionárias, é possível mostrar que ( ) _ 2 , com o
que a formula acima se torna a fórmula de Rayleigh-Jeans para a radiação do corpo negro. O
crescimento desenfreado da densidade E (T; v) _ KT 2 de energia com a temperatura, que obviamente
não condiz com as experiências, é chamada de catástrofe do ultra-violeta.
2. No eletromagnetismo: O resultado negativo da detecção do éter pela experiência de Michelson–
Morley (1887).
No …nal do século XIX era praticamente consenso entre a comunidade cientí…ca que a luz era uma
onda mecânica. Isso exigia a existência de um meio para a sua propagação. Ou seja, em qualquer
região do espaço onde se …zesse vácuo (e.g., as regiões entre as estrelas) sobraria ainda uma substância
que preenche todo o espaço. Esta substância foi chamada de éter. Preenchendo o éter todo o espaço,
seria obviamente possível detectar o movimento dos corpos celeste (em especial a própria terra) em
relação a este meio.
Como previsto por Kelvin, logo no início do século XX foram encontradas as soluções para estes dois
problemas. A solução do primeiro problemas se deu com a proposta de Planck para a discretização dos
níveis de energia do corpo negro e, conseqüentemente, o surgimento da Mecânica Quântica. Já a solução do
segundo problema deu origem a Teoria da Relatividade.
Assim, ao invés de “fecharem” a Física, como previa Lord Kelvin, a solução destes dois problemas simplesmente revolucionou todos os conceitos do homem sobre a natureza e o universo, dando origem a tudo
que hoje se chama “Física Moderna”. Estes novos conceitos reinam nos limites fora das escalas do cotidiano,
ou seja, nos limites de (muito) baixas e altas energias. Estes conceitos exigiram que se repensassem todos
os fenômenos conhecidos e a incorporação (e o desenvolvimento) de novas ferramentas matemáticas. Grosso
modo, o maior problema da Física contemporânea é a elaboração de uma teoria que uni…que a Teoria da
Relatividade Geral e a Mecânica Quântica. Este é um assunto para o curso de Física Moderna II.
A compreensão do primeiro problema e sua solução, i.e., a Mecânica Quântica, é o assunto da segunda
parte do nosso curso.
Vamos iniciar então nosso curso tratando detalhadamente a solução do segundo problema e a Teoria da
Relatividade Restrita (ou Especial ) (TRR).
5
2
Noções de relatividade especial
"... a complete conspiracy is itself a law of nature!” (H. Poincaré)
2.1
Velocidade de propagação das interações
Antes de darmos uma descrição precisa da diferença entre a mecânica clássica (MC) e a mecânica relativística
(MR), vejamos a principal diferença conceitual entre estas duas teorias. Ambas aceitam o chamado princícipio da relatividade. Que signi…ca que as Leis da Física são as mesmas para um determinado conjunto de
observadores que de…nem os chamados Referenciais Inerciais. Assim, o que se altera de uma teoria para a
outra é o conceito de Referencial Inercial.
Na MC espaço,i.e., a localização de um corpo, é relativo, mas o tempo é absoluto. Isso não
signi…ca, é claro, que cada referencial não possa ter seu próprio relógio, mas sim que estes relógio podem
ser sincronizados e, mais ainda, uma vez de…nida uma escala de tempo (e relógios perfeitos) esta sincronização se mantêm para sempre. Assim, existe um único tempo para qualquer referencial
inercial e o intervalo de tempo é o mesmo medido por qualquer refencial inercia. Em especial o
conceito de simultaneidade é absoluto.
Tudo que foi dito acima se resume no fato de que na MC efeitos podem se propagar instantaneamente por todo o sistema. Por exemplo, nesta teoria a ação gravitacional é instantânea. Ou seja, se um
corpo se move, a força que este exerce sobre os demais corpos do sistema se altera no mesmo instante. Com
isso é possível para um observador conhecer o estado de cada corpo em qualquer lugar em
qualquer instante.
Já na MR todo efeito (ou, de forma mais geral, toda informação) precisa de um tempo para se propagar.
Além disso, existe uma velocidade limite, chama c, para a propagação de qualquer informação. No exemplo
anterior isso implica que, se um corpo é deslocado, um segundo corpo a uma distância D deste, levará (no
mínimo) um tempo D=c para tomar conhecimento deste deslocamento. Assim, um observador não pode
(apenas por observação) saber o estado de todos os corpos do universo. Mais ainda, é impossível qualquer
troca de informação com velocidade acima de c.
Um ponto importante, e a razão da MC ter prevalecido por tanto tempo, é que a velocidade limite c está
muito acima da velocidade dos fenômenos do cotidiano. Além disso, os resultados da MC são iguais aos da
MR para c in…nito.
2.2
A mecânica de Newton e Galileu
Dada uma lei física, codi…cada matematicamente numa série de equações, faz-se necessário saber onde estas
leis são válidas. Por exemplo, se você tentar aplicar a lei da inércia de Newton estando dentro de um trem
acelerado, ela certamente falhará. Além disso, para se descreve matematicamente o comportamento de um
corpo, é importante introduzir no espaço um sistema de coordenadas as quais farão referência às equações da
6
teoria em questão. Assim, a questão básica é saber para quais sistemas de coordenadas as equações
são válidas. Uma forma de se responder esta questão é encontrar um certo sistema “bom” para as nossas
leis, i.e., onde as leis são válidas (ou seja, onde isso possa ser veri…cadas experimentalmente). Chamamos
este sistema de referencial. Estando o nosso referencial codi…cado por um sistema de coordenadas, podemos
então descrever uma mudança para outro sistema, ou outro referencial, através de uma relação entre as
coordenadas destes sistemas. Chamamos isso de uma transformação de coordenadas. Nossa questão sobre
quais os sistemas onde a nossa teoria é válida pode, com isso, ser matematicamente traduzida na questão:
Remark 1 Dado um referencial “bom” quais transformações me permitem achar outros referenciais igualmente “bons”?
Em mecânica estes referenciais,i.e., todos os referenciais ligados pela transformação adequada, são chamados de referenciais inerciais.
As equações que descrevem a dinâmica dos corpos massivos, propostas por Newton, fazem referência a um
conjunto de coordenadas espaciais x = (x; y; z) e uma coordenada temporal t. Estas equações são invariantes
por um grupo de transformações conhecidas como transformações de Galileu (TG),
x ! x0 = x
vt ;
y ! y0 = y ;
z ! z0 = z ;
t0 = t ;
(1)
com v uma constantes. Estas transformações descrevem a noção intuitiva de soma e subtração de velocidades.
Usando a notação vetorial x = (x; y; z) e v = (v; 0; 0) e as TG, da de…nição de velocidade
d 0
d
d
(x + vt) = v ;
x = x0 =
dt0
dt
dt
vemos que o parâmetro v da transformação (1) é a velocidade relativa entre os referenciais.
A relação entre t e t0 a…rma que é sempre possível sincronizar os relógios de dois referenciais e estes
permanecerão sempre sincronizados. Assim, as equações (1) descrevem a seguinte situação: existe um
referencial S, com coordenadas (x; y; z; t) e um segundo referencial S 0 , com coordenadas (x0 ; y 0 ; z 0 ; t0 ). O
referencial S 0 (S) se move com velocidade v ( v) na direção x (x0 ) em relação ao referencial S (S 0 ). A
descrição de um referencial que se move numa direção arbitrária pode ser obtida através de uma rotação dos
eixos de forma a alinhar o eixo x com a direção do deslocamento (isso será feito com detalhes na MR mais
adiante).
O conjunto das quatro coordenadas (x; y; z; t) é chamado de um evento no referencial S. Ou seja, usando
as coordenadas de S estas quatro quantidades indicam quando e onde algo ocorreu.
7
Dado um evento em S, como este mesmo evento pode ser descrito usando as coordenadas do referencial
S0?
Por exemplo, suponha que S está parado (o que signi…ca isso?) e S 0 se move para a direita com uma
velocidade de v = 1m=s. No referencial S veri…ca-se que aos 3s um martelo atingiu o ponto x = 0. Ignorando as coordenadas y e z este evento tem coordenas (x = 0; t = 3). Suponha ainda que os relógios dos
referenciais estejam sincronizados (isso está descrito pela última equação em (1)) e que as origens dos
referenciais coincidem em t = 0 (isso está descrito três primeiras equações em (1)). Com isso, este mesmo
evento será descrito por alguém que usa o referencial S 0 com tendo ocorrido aos 3s, mas na posição x0 = 3,
ou seja, com coordenadas ( 3; 3).
Alguns pontos devem ser notados nas transformações (1):
1. Os relógios dos referencias devem ser sincronizados e, uma vez feito isso, eles permanecerão sempre
sincronizados.
2. Além de alinhar os seus eixos espaciais, o referencial S 0 deve marcar a origem do seu referencial como
sendo a origem do referencial S no instante t = t0 = 0.
A mecânica de Newton admite os postulados:
1. A força num corpo é diretamente proporcional a aceleração e a constante de proporcionalidade é a
massa do corpo.
2. A massa de um corpo não depende do referencial.
O chamado princípio da relatividade de Galileu estabelece que:
Remark 2 Dado um certo referencial onde são válida as leis de Newton (ou as leis da MC), qualquer outro
referencial ligado pelas transformações (1) serão igualmente bons.
Para entender isso note que
d2 x
d2 x0
d2 x0
d2 (x + vt)
d2 x
!
=
=
=
:
dt2
dt02
dt2
dt2
dt2
(2)
Ou seja, a aceleração possui os mesmos valores em todos os referenciais.
Os postulados acima e a equação (2) implicam que em ambos os referenciais, a equação de movimento
tem a mesma forma algébrica
F (x) = m
d2 x0
d2 x
=
m
= F0 (x0 ) ;
dt2
dt2
onde F0 (x0 ) tem a mesma forma algébrica de F apenas substituindo x por x0 .
8
Diz-se, com isso, que as equações de Newton são invariantes, pelas transformações de Galileu. Diz-se,
também, que as equações de Newton são covariantes (tem a mesma forma algébrica) por transformações de
Galileu.
Resumindo:
Remark 3 As transformações de Galileu de…nem os referenciais inerciais da mecânica de Newton.
Exercise 4 Suponha que você está num container num navio que trafega com velocidade constante. Que tipo
de experimento você pode fazer para determinar que você está em movimento?
A invariância das equações de Newton por transformações de Galileu possui a conseqüência física de ser
impossível determinar movimentos retilíneos uniformes por qualquer experimento mecânico
realizado num referencial. Em outras palavras, se dois referenciais se movem um em relação ao outro
com velocidade v, não faz sentido dizer qual deles está em movimento e qual está em repouso.
Assim, quando se está num referencial inercial, todos os experimentos mecânicos podem ser
realizados como se o seu referencial estivesse em repouso. Nada disso é válido se o referencial
estiver acelerado. Ou seja:
Remark 5 Qualquer relação entre os referenciais diferente das TG poderia ser determinada por experimentos
mecânicos dentro do próprio referencial.
2.2.1
Distinguindo a física da matemática
Remark 6 É de fundamental importância notar que: F0 (x0 ) 6= F (x0 ). A discussão a seguir tentará torna
clara esta distinção.
Aqui é importante separar um pouco a matemática da física. Suponha que um observador em S 0 descreve
o movimento de uma mola. Nesta descrição ele obtem a relação:
m
d2 x0
=
dt2
kx0 = F 0 (x0 ) :
Matematicamente nós sempre podemos efetuar uma transformação de coordenadas, ou seja, podemos mudar
as variáveis do problema. Suponha então que efetuamos a mudança de coordenadas (ou de variáveis) (1).
Com isso:
x ! x0 = x vt =) F 0 (x0 ) = kx0 ! F 0 (x) = k (x vt) :
Sabendo que
m
d2 x0
d2 x
=m 2
2
dt
dt
9
então a "equação de Newton" se tornaria
m
d2 x
=
dt2
k (x
vt) :
(3)
Mas, pela covariância das leis de Newton, sabemos que a equação que descreve o movimento da mola tem a
mesma forma algébrica em todos os referenciais inerciais. Ou seja, sendo S um referencial inercial a equação
da mola deveria ser
d2 x
(4)
m 2 = kx :
dt
Exercise 7 Qual das duas equações, (3) ou (4), descreve o movimento da mola? O que cada uma destas
equações descreve?
10
Retomando ao problema acima, existe uma diferença entre efetuar uma transformação de coordenadas na
equação de movimento e usar a covariância das equações do movimento.
Pela lei de Newton, a equação diferencial que descreve o movimento de uma mola tem a forma
m
d2 x0
= F 0 (x0 ) =
dt2
kx0
realizando uma transformação de Galileu (um artifício matemático válido para qualquer transformação)
nesta equação temos
m
d2 (x + vt)
=
dt2
k (x + vt) =) m
d2 x
=
dt2
kx
kvt = F 0 (x) :
A solução desta equação pode ser escrita como:
x=
vt + A cos (!t + ) ; ! =
r
k
; A;
m
= const:
Fácil ver que esta equação descreve o movimento de uma mola cujo centro das oscilações está em repouso
no sistema que usa coordenadas x0 quando vista do sistema que usa coordenadas x. Ou seja, uma mola que,
além de oscilar, se move com velocidade constante v.
O processo utilizado acima nada mais é que uma mudança de variáveis. Você sempre pode fazer isso
com qualquer transformação (não apenas TG). Este procedimento não envolve nenhuma consideração
sobre a teoria física em questão.
Agora, invocar a covariância das equações (um postulado físico) signi…ca que se num referencial inercial
você fez experimentos com uma mola e obteve a equação
F 0 (x0 ) = kx0 =) F (x) = kx ;
em qualquer outro referencial inercial você sabe, sem precisar fazer experimentos de novo, que a
equação desta mola terá a mesma forma, mas com as coordenadas deste novo referencial. Isto é, num
referencial qualquer onde o centro das oscilações está em repouso, ela terá a mesma forma,
m
d2 x
=
dt2
kx =) m
d2 x0
=
dt2
kx0 :
O mesmo válido sempre que o movimento for observado de qualquer outro referencial inercial no qual o
centro das oscilações esteja em repouso.
2.2.2
Um pouco de notação
Podemos escrever as equações acima, em especial a TG, usando 4 tipos de notação:
11
1. A primeira, usada acima em (1), especi…cada cada uma das transformações;
2. A segunda, também usada acima usa a notação vetorial
x0
= x
t0
= t;
vt ;
3. Uma notação muito conveniente, mas ainda não usada, é não chamar as coordenadas de x; y; z, mas
sim de x1 ; x2 ; x3 . Com isso a TG pode ser escrito de uma forma mais compacta
x0i
= xi
t0
= t;
vi t
com i = 1; 2; 3, v1 = v e v2;3 = 0. Neste caso a notação deixa explicita cada uma das componentes do vetor.
4. Podemos também usar a notação matricial (i.e., usar uma representação matricial para os vetores)
x0
t
onde
0
B
B
T =B
B
@
1 0 0
0 1 0
0 0 1
0 0 0
v
0
0
1
= Tx ;
0
= t;
1
0
C
B
C
B
C ; x0 = B
C
B
A
@
x01
x02
x03
t
1
C
B
C
B
C ; x=B
C
B
A
@
Neste caso podemos também explicitar as componentes do vetor:
x0i
=
3
X
0
x1
x2
x3
t
1
C
C
C :
C
A
Tij xj :
j=1
Podemos nos perguntar, por exemplo, se um observador em S 0 mede um determinado evento, qual a
coordenada deste evento em S?
12
Bem, se S vê S 0 se movendo com velocidade v, então, obviamente S 0 vê S se movendo com velocidade
v. Ou seja, a transformação T~ 1 procurada vale
T~
1
0
B
B
=B
B
@
1
0
0
0
0
1
0
0
1
0 v
C
0 0 C
C ;
1 0 C
A
0 1
Sem utilizar o argumento físico acima, podemos também inverter diretamente as equações que de…nem a
transformação. Por exemplo, na notação matricial
x0 = T x =) x =T
assim, devemos apenas calcular a inversa da matriz T .
13
1 0
x ;
Calculando e T
1
temos
T
1
Que nada mais é que a transformação T~
2.2.3
0
B
B
=B
B
@
1
1
0
0
0
0
1
0
0
1
0 v
C
0 0 C
C = T~
1 0 C
A
0 1
1
:
determinada com argumentos físicos.
O eletromagnetismo e as TG
O chamado princípio da relatividade de Galileu pode ser enunciado como:
1. As leis da mecânica são as mesmas em qualquer referencial inercial;
2. Um referencial é inercial se existe uma transformação de Galileu que o transforma num outro sabidamente inercial.
O ponto aqui é que gostaríamos de encontrar condições de validade não apenas para as leis de Newton,
mas para todas as leis da Física.
Exercise 8 Em que referenciais é válido, por exemplo, o eletromagnetismo?
A discussão acima deixa claro como é importante saber para quem uma certa teoria é válida. Esta questão
é crucial, obviamente, não apenas para a mecânica, mas para qualquer teoria física (ou ainda, qualquer teoria).
Em especial, é mandatório saber para qual tipo de referencial é válido o eletromagnetismo.
Um ponto chave em relação a mecânica é que a força que gera a dinâmica depende da segunda
derivada da posição em relação ao tempo (a equação (2) mostrou que isso é essencial). Isso faz com o
termo v t na TG desapareça do lado direito da lei de Newton e garanta a covariância da teoria. Em outras
paravas:
Remark 9 As fórmulas envolvidas na mecânica Newtoniana não dependem da velocidade, mas
apenas da aceleração.
Já no eletromagnetismo as fórmulas envolvidas possuem uma dependência explícita da velocidade. Por exemplo, vimos que o movimento uniforme é um conceito relativo, contudo a aceleração
não (todos os RI medem a mesma aceleração), mas a força de Lorentz, que governa a dinâmica das cargas
massivas no eletromagnetismo (i.e., fornece o link entre o eletromagnetismo e a mecânica) vale
F = q [E + v
B] :
Um observado em repouso com a carga imersa num campo magnético B não detecta nenhuma força (conseqüentemente nenhuma aceleração) enquanto outro com velocidade v detecta a força qv B (conseqüentemente
uma aceleração). Como …ca então a invariância das leis da mecânica?
14
Outro exemplo é a lei de Ampère
Z
B:dl =
0I
+
@S
0 "0
@ (E)
:
@t
A corrente I é dada pela velocidade das cargas. Assim, se tivemos um pedaço de …o com uma certa
distribuição de carga, este …o gera um campo magnético para um observador que vê o …o se mover com
velocidade v, mas não para um observador parado com o …o.
Surge então a questão crucial:
Qual a velocidade que deve ser usada nas equações de Maxwell e na força de Lorentz, ou ainda, em
relação ao que são medidas as velocidades do eletromagnetismo?
2.3
O experimento de Michelson e Morley (1887)
A necessidade de um referencial para o qual as leis do eletromagnetismo fossem válidas foi percebido desde
os primórdios da teoria. Entretanto isso não foi considerado um grande problema, pois, desde o século 17th
Boyle (e outros) já acreditavam que não existia o vácuo e que todo espaço não preenchido por partículas era
preenchido por uma substância chamada éter, a qual era responsável, inclusive, por qualquer interação entre
corpos que não estivessem em contato 3 . Neste mesmo período Huygens havia criado a hipótese de que a
luz se propagava no éter. Em outras palavras, a luz foi considerada uma onda mecânica que se
propagava no éter. Com o desenvolvimento das equações de Maxwell (EM) no século XIX e a constatação
de que a luz era uma onda eletromagnética, …cou claro para os cientistas da época que as velocidades
envolvidas na teoria do eletromagnetismo eram todas medidas em relação ao éter.
Veio então uma necessidade prática de medir a velocidade da terra, ou de alguma região especí…ca, em
relação ao éter. Pois, só assim as EM poderiam ser aplicadas corretamente.
Dentre os vários experimentos desenvolvidos para se medir a velocidade da terra em relação ao éter, o
mais famoso foi o experimento de Michelson e Morley (MM), devido a sua precisão compatível com o valor
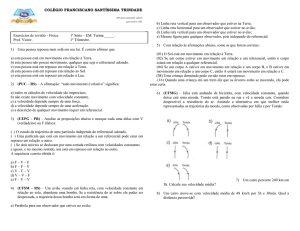
da velocidade da luz. O que MM inventaram foi, na verdade, o interferômetro.
Neste aparato um feixe de luz coerente é dividido em dois feixes por uma placa parcialmente prateada.
Os dois feixes são re‡etidos por espelhos que distam da mesma distância L e se recombinam. Se imaginarmos
que a luz se propaga no éter e que este está em repouso com relação ao aparato, ambos os feixes percorrerão
a mesma distância e se recombinarão de forma construtiva. Agora, se a luz se propaga no éter (como o
som se propaga no ar) é o éter se move com uma velocidade v com relação ao aparato, os feixes percorrerão
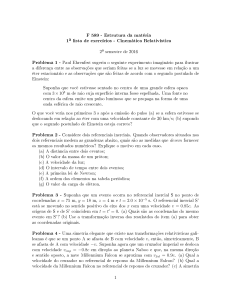
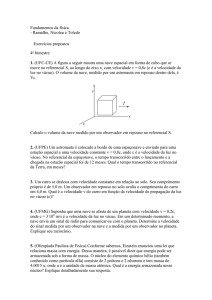
distâncias diferentes e se recombinarão fora de fase. Vejamos isso com mais detalhes. Se o aparelho se move
em relação ao éter como na Figura 1, suponha que o feixe que move na direção da placa C (perpendicular a
3 Para
Kelvin átomos eram vórtices no éter.
15
Figure 1: Interferômetro (…gura retirada do livro do Feynman).
16
v) demore um tempo tC para atingir esta placa. Assim, este este feixe percorrerá uma distância
2
d2C = L2 + (v:tC ) :
(5)
Se a velocidade da luz no éter vale c temos também
dC = c:tC ;
(6)
com isso,
2
2
L2 + (v:tC ) = (c:tC ) =) tC = q
=
1
v2
c2
L=c
1
L
;
c
=
v2
c2
1=2
> 1 para v < c :
onde L=c seria o tempo gasto se o aparato estivesse em repouso em relação ao éter. Voltando na expressão
(6) temos
L
dC = c:tC = c:
= c:tC = L :
c
Assim, a distância total L? percorrida pelo o feixe perpendicular a v para ir e retornar à placa B vale:
L? = 2dC = 2 L :
Já para o feixe na direção da placa E (paralelo a v) temos: quando o feixe atinge E a placa se deslocou uma
distância v:tBE . Assim, a distância dBE percorrida pelo feixe vale
dBE = L + v:tBE = c:tBE =) tBE =
L
c
=) dBE = L 1 +
v
v
c
v
:
Enquanto o tempo tEB e a distância dEB para o feixe voltar valem
dEB = L
v:tEB = c:tEB =) tEB =
L
=) dEB = L 1
c+v
v
c+v
:
Assim, a distância total Lk percorrido pelo feixe paralelo a v vale
v
1
Lk = dBE + dEB = L 2 +
c 1 vc
"
#
1 v2
= 2L 1 +
= 2L 1 +
2
1 vc2 c2
1
1+
v
c
1
2
2
17
"
v
=L 2+
c
+1
= 2L
2
1+
1
v
c
v2
c2
1
1
= L? > L? ;
v
c
v2
c2
!#
>1:
Dos resultados acima vemos, que as distâncias Lk e L? percorrido pelo dois feixes são diferentes. Esta
diferença se traduz em franjas de interferência na composição dos feixes defasados. Com isso podemos
detectar variações da ordem de grandeza do comprimento de onda da luz utilizada e, conseqüentemente,
variações na velocidade do éter em relação ao aparato desta mesma ordem de grandeza.
Tecnicamente não é possível construir um aparato onde ambas as distâncias sejam exatamente iguais.
Assim, logo de inicio já temos a presença de franjas de interferências. Com isso, o que realmente se esperava
observar seria uma modi…cação nestas franjas devido ao movimento do aparato em relação ao éter quando
o aparato fosse girado de 90 graus. Ou seja, girando-se este interferômetro pretendia-se observar diferença
nas velocidades dos feixes conforme estes percorriam caminhos paralelos ou perpendiculares ao deslocamento
do éter. Entretanto nenhuma diferença jamais foi observada! Várias tentativas de se explicar o fracasso
(na verdade um sucesso!) deste experimento foram desenvolvidas. Entre elas havia a hipótese do éter ser
arrastado com a terra, mais isso levava a inconsistências com as propriedades de viscosidade deste meio e
com os efeitos observados em fontes luminosas extraterrestres.
18
2.4
As transformações de Lorentz
Uma proposta de Lorentz e Fitzgerald (LF) foi a…rmar que o éter comprimia todos os corpos na direção de
1
seu movimento por um fator
(lembre que > 1 para v < c). Pois, com isso, a distância percorrida pela
1
~
luz não seria Lk , mas Lk =
Lk e com isso
~ k = 1 Lk = 1 ( L? ) = L? ;
L
ou seja, neste caso as distâncias percorrida pelos feixes na experiência de MM seriam as mesmas e nenhuma
mudança das franjas seria observada. Este efeito, conhecido como contração de Lorentz, será retomado na
TR, mas num contexto completamente diferente. Porém Lorentz justi…cava esta contração a…rmando que as
forças moleculares seriam in‡uenciadas pela corrente de éter. Ou seja, a interpretação física de LF estava
errada.
Além disso, no desenvolvimento do problema LF tiveram sucesso em encontrar transformações das coordenadas que deixavam invariantes as EM4 (na verdade, estas transformações já haviam sido propostas
por Larmor em 1900, enquanto os trabalhos de LF são de 1903), desde que os campos também se
modi…cassem. Estas transformações têm a forma
x0 =
(x
vt) ;
y0 = y ;
z0 = z ;
t0 =
vx
c2
t
e são hoje conhecidas (para
= 1) como as transformações de Lorentz (a modi…cação dos campos será
vista depois). A interpretação da primeira transformação seria a contração mencionada anteriormente. Pois
suponha que no referencial S 0 , num instante t0 foi efetuada uma medida entre os pontos x01 e x02 . Assim, a
distância entre estes pontos em S 0 vale
0
x = x02 x01 :
Usando as transformações acima (com
x0 = x02
x01 =
= 1) temos
(x2
vt)
(x1
vt) =
(x2
x1 ) =
x
Assim, a distância entre estes dois pontos, quando registradas por um observador em S, vale
x=
1
x0 :
4 Na verdade, o tratamento de Lorentz está correto apenas no vácuo, pois os termos que contém transformações de cargas e
correntes não estavam correto.
19
Que é a contração de Lorentz mencionada acima.
Já a transformação do tempo era considerada uma aberração na medida do tempo ocasionada também
pela in‡uencia do éter nos fenômenos eletromagnéticos (esta transformação já havia sido introduzida, como
um artifício matemático, por Voigt em 1887). Entretanto, uma medida de tempo que não envolvesse efeitos
eletromagnéticos não sofreria esta aberração.
Um ponto importante destes trabalhos, também re-utilizado na TRR, foi a idéia de uma “massa eletromagnética”dependente do referencial. Ou seja, para fenômenos eletromagnéticos a massa dos corpos
não poderia ser considerada uma constante.
A contração de Lorentz, por afetar todos os corpos, não poderia ser medida por nenhum experimento.
Mas estes resultados não fecharam a questão do éter, pois experimentos diferentes foram desenvolvidos para
detectar o movimento do éter e, para cada um deles, tinha de se introduzir uma nova característica para se
explicar o seu fracasso (e.g., o éter é um super‡uido etc). Ou seja, nenhum experimento (eletromagnéticos ou
mecânico) permitia “ver”o éter. Todas estas “conspirações”da natureza para esconder o éter levou Poincaré
a…rmar “uma conspiração completa só pode ser uma lei da natureza”. Isso levou Poincaré a generalizar o
princípio da relatividade de Galileu e a…rmar:
Todas as leis da Física são invariantes por transformações de Lorentz.
Como veremos, o mesmo postulado foi proposto, quase simultaneamente, nos trabalhos de Einstein.
Além disso, estudando as propriedades de grupo das TL Poincaré determinou que = 1 (o que foi usado nos
trabalhos de Lorentz, mas apenas como uma escolha arbitrária).
Obviamente isso trazia um problema desconcertante, pois as equações de Newton, que até então haviam
previsto com sucesso os movimentos de corpos no céu e na terra, não era invariante por estas transformações
e, conseqüentemente, não seriam uma lei da Física.
Como vimos vários trabalhos até 1904 continham os embriões da TRR. Entretanto, num trabalho de 1905
Einstein conseguiu agrupar todas estas idéias e fornecer as, até então inexistentes, interpretações físicas de
todas as conseqüências da teoria.
2.5
A relatividade de Einstein
"...the covariant law should be derivable from the simplest possible basic assumptions. The credit for having
succeeded in doing just this goes to Einstein.", (W. Pauli )
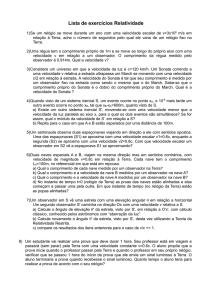
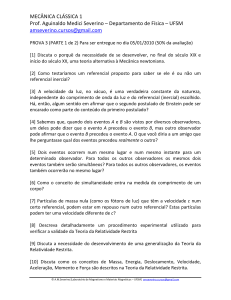
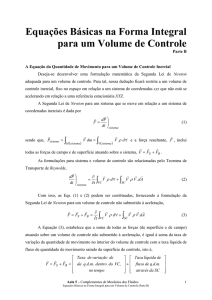
Nos trabalhos de Einstein de 1905 sobre a TRR ele faz menção a um experimento parecido com o seguinte:
imagine uma bobina quadrada de lado l se movendo (e.g., dentro de um carro) e entrando numa região com
campo magnético uniforme B (Figura 2).
Considere este problema sob 2 pontos de vista:
1. Você está parado na região do campo e vê a bobina se mover para dentro do campo.
Neste caso, com o movimento das cargas da bobina, você vê surgir uma força de Lorentz F que, por
20
Figure 2: Figura 2.
sua vez, faz surgir uma EMF (trabalho por unidade de carga) dada por:
1
E=
q
(o sinal de
Z
1
F:dl =
q
q
vem da velocidade estar na direção
Z
(v
B) :dl =
vBl
x
^);
2. Agora você está dentro do carro, i.e., se movendo com a bobina.
Neste caso não há cargas se movendo e, conseqüentemente, não há forças de Lorentz. Mas você
conhece as leis do eletromagnetismo e, em especial, a Lei de Faraday. Você sabe que na bobina há um
‡uxo magnético ,
Z
(B) =
B:da = Bl:s ;
onde s é a parte da bobina que entrou no campo. A variação temporal deste ‡uxo induz um campo
elétrico E que, por sua vez, gera a EMF:
E=
Z
E:dl =
d (B)
=
dt
d
(Bl:s) =
dt
Bl
ds
=
dt
Blv :
Observe que para aqueles que criam no éter a igualdade destes dois valores de E é uma coincidência
impressionante. Pois suponha que no caso 1 a pessoa está num referencial bom, i.e., que não se move em
relação ao éter. Neste caso seus cálculos vão fornecer o resultado correto, mas para qualquer outro referencial,
em especial o do caso 2, as contas estariam erradas. Ou seja, a pessoa do caso 2 não poderia usar as EM.
E o mesmo para o caso contrário, se a pessoa parada no campo está no referencial bom, então a pessoa no
carro não poderia usar a lei de Lorentz. Ou seja, apenas um dos observadores acima poderia obter a resposta
correta, mas como estas são iguais ambos devem estar certos.
21
Em sua análise do problema, Einstein tomou o resultado acima não como uma coincidência, mas como
uma conseqüência dos fundamentos da lei da física.
2.5.1
Primeiro postulado
Seu primeiro passo foi abandonar a existência do éter, e de qualquer outro referencial privilegiado,
e estender o postulado da relatividade de Galileu:
1. As leis da física são as mesmas em qualquer referencial inercial;
Mas esta extensão levava a um problema sobre o que é um referencial inercial. Como vimos, as leis do
eletromagnetismo não são invariantes por uma transformação de Galileu. Por outro lado Lorentz encontrou
leis de transformação que mantinham invariantes as EM. Entretanto, as equações da mecânica de Newton não
são invariantes pelas transformações de Lorentz. Neste sentido, o postulado acima nos diz que uma destas
teorias não está correta.
Alguns tentaram mudar as EM para serem invariantes pelas TG, mas isso gerou efeitos eletromagnéticos
que não foram observados.
Einstein escolheu como corretas as leis do Eletromagnetismo. Com isso, referenciais inerciais são
aqueles ligados pelas transformações de Lorentz:
x0 =
(x
vt) ;
y0 = y ; z0 = z ;
vx
t0 =
t
:
c2
(7)
Assim como no caso das transformações de Galileu, as equações acima descrevem a seguinte situação: existe um referencial S, com coordenadas (x; y; z; t) e um segundo referencial S 0 , com coordenadas (x0 ; y 0 ; z 0 ; t0 ).
O referencial S 0 (S) se move com velocidade v ( v) na direção x (x0 ) em relação ao referencial S (S 0 ). O
conjunto das quatro coordenadas (x; y; z; t) é chamado de um evento no referencial S. Ou seja, usando as
coordenadas de S estas quatro quantidades indicam quando e onde algo ocorreu. Dado um evento em S,
como este mesmo evento pode ser descrito usando as coordenadas do referencial S 0 .
Remark 10 A descrição acima, apesar de ser repetitiva e óbvia, deve ser entendida bem. Pois uma das
grandes di…culdades na resolução de problemas em TRR é transcrever um dado evento na linguagem das
coordenas.
Diferente das transformações de Galileu, atente para o seguinte:
1. Para usar as transformações acima os observadores de ambos os referenciais devem sincronizar os seus
relógios em algum instante. Entretanto, relógios sincronizados num instante T qualquer
NÃO mais estarão sincronizados para qualquer instante diferente de T .
22
2. Se os relógios foram sincronizados de forma que t = t0 = 0, o referencial S 0 deve marcar a origem do
seu referencial como sendo a origem do referencial S neste instante t = t0 = 0.
A sincronização e marca da origem dos referenciais é arbitrário, mas as escolhas acima evitam que se
carregue constantes desnecessárias.
Vamos voltar exatamente no mesmo exemplo que tratamos quando estudamos as transformações de
Galileu. Suponha que S está parado e S 0 se move para a direita com uma velocidade de v = 1m=s. Aos
3s medidos no referencial S (isso é de fundamental importância) um martelo atingiu o ponto x = 0.
Ignorando as coordenadas y e z este evento tem coordenas (x = 0; t = 3). Se visto do referencial S 0 após,
este mesmo evento será descrito como um evento que ocorreu aos
x0 =
3 ; t0 = 3 ;
i.e., no instante t0 = 3 e na posição x0 =
3, ou seja, a coordenada do evento em S 0 será ( 3 ; 3 ). Observe
que agora, os observadores medem não apenas posições diferentes, mas também tempos diferentes (mesmo
com seus relógios sincronizados em t = t0 = 0). Entender este fato, e suas conseqüências, é o objetivo desta
parte do curso. Entretanto, neste exemplo em especí…co, como v << c, os resultados são muito próximos do
caso anterior
1
=q
= 1; 00000000000000000
|
{z
}5 :
1 c12
17 zeros
Por isso este tipo de discrepância não é observado no cotidiano onde as velocidades envolvidas são pequenas
(em comparação a c).
Remark 11 Uma conseqüência da generalização do princípio da equivalência de Galileu para o de Einstein
é que, se no primeiro é impossível detectarmos um MRU por qualquer experimento mecânico no referencial.
Já o segundo a…rma que este movimento não pode ser detectado por nenhum experimento em geral, seja ele
eletromagnético ou qualquer outro.
2.5.2
Segundo postulado
Uma conseqüência direta das EM é o valor da velocidade da luz no vácuo. Uma vez que as EM e, conseqüentemente, o cálculo desta velocidade independem do referencial, isso levou Einstein ao segundo postulado
da TRR:
2 A velocidade da luz no vácuo é a mesma para qualquer observador num referencial inercial, independente
do movimento da fonte ou do observador.
Por velocidade no postulado acima se deve entender a magnitude apenas e não o vetor velocidade. Como
veremos, a “direção” da luz pode depender da fonte.
23
Observe que, a princípio, o comportamento de uma onda mecânica, como o som, também não depende
do movimento da fonte (mas apenas do movimento do meio onde se propaga). Mas o comportamento da luz
é algo bem diferente disso. Imagine um nevoeiro onde seja possível “ver” a luz se propagar. Neste nevoeiro
temos duas pessoas que se movem com velocidade constante uma na direção da outra. No ponto aonde elas
irão se encontrar existe um poste que, quando aceso, emitirá uma frente esférica de luz. Assim, ao passar
uma pela outra o poste se acende. O que cada um dos observadores irá ver. O primeiro verá uma onda
esférica com ele no centro da esfera, enquanto o outro observador certamente está em algum ponto fora deste
centro. Já o segundo verá uma esfera com ele no centro (pois para ambos a luz se afasta com velocidade c em
todas as direções) e a…rmará, com certeza, que o outro observado é que está fora do centro. Mas certamente
existe apenas uma frente de luz.
Exercise 12 Qual deles diz a verdade?
24
Como veremos, o segundo postulado nos leva a reconsiderar o que até então chamamos de “verdade”.
O segundo postulado acima, além de completamente anti-intuitivo, representa uma completa revolução
nas noções usuais de distância e, conseqüentemente, da geometria do tempo e do espaço.
A importância crucial de uma lei física é fazer previsões (esta característica é imprescindível para que a lei
possa ser testada). Ou seja, a lei deve dizer quando e onde algum fenômeno ocorrerá, a partir do conhecimento
do estado (como e onde) do sistema no passado. Até Einstein pouca importância se dava a uma de…nição
precisa dos termos quando e onde (obviamente os valores sempre foram importantes), uma vez que estes
são intuitivos o su…ciente para que esta questão fosse apenas uma questão …losó…ca. Em especial, observador
de diferentes referenciais (não necessariamente inerciais) poderiam em algum momento e lugar compartilhar
réguas e relógios que posteriormente seriam usados por cada observador no seu respectivo referencial. Assim,
dado, por exemplo, um ponto de referência “visível” por todos os referenciais, este poderia ser usado para
converter as distâncias de um observado para o outro. Por exemplo, dado um ponto qualquer (e.g., um poste)
um observador sempre poderia dizer aos demais, as cinco horas o carro estava a cinco quilômetros de
distância do poste. Cada observador, independente do seu movimento, entenderia esta a…rmação. Além
disso, um outro fenômeno, por exemplo, quando o carro passar pelo poste, poderia ser usado para sincronizar
o relógio de todos os observadores. Vamos ver como o segundo postulado acima muda drasticamente este
senso-comum.
2.5.3
O segundo postulado e as TL
Vamos ver como este postulado se relaciona com as TL. Imagine que na origem de um referencial S emitimos
um sinal luminoso. Após um tempo t (medido em S) a frente deste sinal terá viajado a distância ct, ou seja,
se (x; y; z) são as coordenadas da frente de onda,
ct =
p
2
x2 + y 2 + z 2 =) (ct) = x2 + y 2 + z 2
Para simpli…car vamos imaginar que o sinal foi emitido na direção x, com isso
2
2
(ct) = x2 =) (ct)
x2 = 0
Imagine agora um outro observado num referencial S 0 que se move com velocidade v^
x em relação a S.
Pelo primeiro postulado este observador também verá a luz se deslocar com velocidade c e, conseqüentemente,
após um tempo t0 (medido no relógio de S 0 ) o a frente de onda terá coordenada ct0 , assim, se x0 é a coordenada
da frente de onda, temos
2
(ct0 )
x02 = 0
.As duas relações acima permitem identi…car as quantidades
2
(ct)
2
x2 = (ct0 )
25
x02 ;
(8)
para qualquer refencial. Queremos agora encontrar uma relação entre x; t e x0 ; t0 que respeite a condição
acima. Lembrando a relação entre as funções hiperbólicas
cosh2 a
sinh2 a = 1
(9)
é fácil ver que esta relação é satisfeito (de forma geral) se estas coordenadas tiverem a relação
x = x0 cosh a + ct0 sinh a ;
ct = x0 sinh a + ct0 cosh a :
(10)
Exercise 13 Veri…que que (10) respeita (8).
Suponha agora que um observador em S siga (observe) a origem de S 0 (x0 = 0). Em S este ponto terá as
coordenadas:
x = ct0 sinh a ;
ct = ct0 cosh a :
dividindo estas relações
x
= tanh a
ct
obviamente, pela construção do problema, a origem de S 0 se move com velocidade v, i.e.,
x
=v ;
t
com isso
tanh a =
v
:
c
(11)
Usando esta igauldade e a relação (10) temos
sinh a =
cosh a =
V =c
v
q
=
;
c
V2
1 c2
q
1
1
V2
c2
=
Exercise 14 Veri…que que a relação acima respeita (11) e (9).
26
:
Substituído novamente em (10) temos
x =
t
=
(x0 + vt0 ) ;
v
x0 2 + t0 :
c
Que são as TL entre os referenciais S e S 0 (ou seja, (7) trocando v por
de Einstein se relaciona com as TL.
v). Vemos assim como o postulado
Exercise 15 Uma vez que as TL misturam as coordenadas temporais e espaciais, é muito útil que todas as
quantidades tenham a mesma unidade. Assim, ao invés de trabalharmos com t usualmente trabalhamos co ct
e escrevemos as TL como
x0 =
(x
vt) ;
y0 = y ; z0 = z ;
v
ct0 =
ct
x
c
:
Escreva estas transformações na forma matricial. Calcule a inversa da matriz T
é a mesma que se obtém invertendo o sinal de v nas TL.
2.6
1
e mostre que esta matriz
Sobre o tempo
A última equação em (7) mostra que o tempo para observadores em referenciais diferentes não é
o mesmo. Vamos ver melhor o que isso signi…ca. Para tanto, vamos construir um tipo de relógio bastante
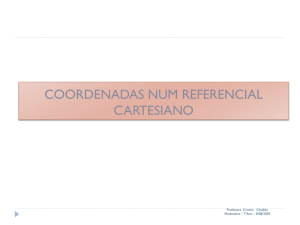
simples e especial. Nosso relógio é composto pela fonte de luz e o espelho da Figura 3. Chamamos de uma
unidade de tempo (t) o tempo que a luz demora para sair da fonte e atingir a fotocélula. Admitindo o
primeiro postulado, no nosso referencial esta unidade de tempo vale:
t=2
D
:
c
Se você quiser imaginar um relógio imagine que a luz pisca e quando o feixe re‡etido atinge a fotocélula
existe um dispositivo que faz a luz piscar novamente. Assim, esta luz piscando é o nosso relógio.
Imagine agora que construímos 2 destes relógio de luz exatamente iguais e os iniciamos simultaneamente.
Assim, estes dois relógios estão sincronizados. Pegamos agora um destes relógios e entregamos para um
observador num foguete que se move com a velocidade v indicada na …gura acima. Este observador, pra seu
conforto, utiliza um sistema de coordenadas S 0 que viaja junto com o foguete.
Como o mecanismo do relógio de luz não se modi…cou e a velocidade da luz é uma constante
o observador na nave vê o seu relógio piscar com a mesma periodicidade t. Entretanto, quando o observador
da nave olha para o relógio que …cou na terra, ele tem uma surpresa. Como, para ele, a luz do aparato que
27
Figure 3: Figura 3 - Retirado do Feymann
está na terra percorrer um caminho diferente, admitindo o primeiro postulado, para este observador temos
2
2
(c ) = D2 + (v ) =)
=
1
1
c
v2
c2
1=2
D=
D
;
c
onde é o tempo que a luz demora pra ir da lâmpada ao espelho. Com isso, o tempo total t0 para a luz ir e
voltar vale:
D
t0 = 2 = 2
= t:
(12)
c
Lembrando, novamente, que para v < c =) > 1, vemos que t0 > t. Ou seja, para o observador na nave o
relógio na terra demora mais para completar um ciclo do que o relógio que está com ele.
p
Por exemplo, para v = 3c=2 temos = 2 e t0 = 2t. Ou seja, se o observador em S vê a lâmpada piscara
a cada 1 segundo, o observador em S 0 a vê piscarar a cada 2 segundos (lembrando que o observador em S 0
vê a lâmpada do seu próprio relógio piscar também a cada 1 segundo). O relógio de S quando visto de S 0
anda mais devagar. Chamamos isso de dilatação do tempo.
Remark 16 A equação acima nos diz o seguinte: no nosso referencial S 0 temos um relógio que marca um
tempo t0 (i.e., este relógio está parado em relação a nós). Olhamos então um referencial em movimento
S. Este referencial S também possui um relógio que marca um tempo t (se transportado para o nosso
referencial este relógio marcará a mesma unidade de tempo t = t0 ). Se observarmos um evento
que ocorreu em S podemos marcar a duração deste evento usando qualquer um dos dois relógios
(nós vemos os dois relógios). Suponha então que você está em S 0 com um cronômetro na mão (que marca
um tempo t0 ) e, olhando para S, você vê ocorrer um evento e também enxerga o relógio de S. Então, olhando
28
para o relógio de S você observa que este evento demorou um tempo t para ocorrer. Assim que o evento
terminou você parou o seu cronômetro. Quando você olhar para o seu cronômetro este marcará um tempo
t0 =
t > t.
Mas, obviamente, isso parece uma particularidade do nosso relógio. É aqui que entra o primeiro postulado. Lembre-se que devido a invariância das equações de Newton por uma transformação de Galileu seria
impossível (por experimentos mecânicos) detectar o movimento uniforme de um referencial inercial em relação a outro. Da mesma forma, admitir o primeiro postulado da relatividade de Einstein é equivalente a
a…rmar que é impossível (por qualquer experimento) determinar o movimento uniforme de um
referencial inercial em relação a outro. A única diferença é que, agora, não nos restringimos apenas a
experimentos mecânicos. Assim, admitir o primeiro postulado implica que é impossível detectar a velocidade
v do experimento acima fazendo qualquer experiência em S 0 (ou seja, não se pode a…rmar qual referencial está
se movendo e qual está parado.). Suponha então que exista algum outro relógio em S 0 (mecânico, atômico
etc) que não sofra exatamente a mesma dilatação do nosso relógio de luz. Um observador em S 0 poderia
então medir a diferença de tempo entre estes relógios e, com isso, determinar que o seu referencial está se
movendo. Assim, adotar os dois princípios da relatividade implica que qualquer relógio que se mova
anda mais lento. Na verdade, isso é válido para qualquer seqüência de evento, seja ele uma gota caindo,
uma planta crescendo, qualquer coisa! Ou seja, para quem está na nave, tudo na terra parece estar em
câmera lenta.
Para ilustrar o signi…cado da expressão (12), imagine que em S 0 , juntamente com o relógio, existe uma
torneira gotejante. Esta torneira está a uma altura na qual, quando medido em S 0 (i.e., no referencial onde
a torneira e o relógio estão em repouso) a gora demora 1 segundo para atingir o piso. Já um observado
do referencial S, que se move com = 2, este tem duas possibilidades para marcar o tempo de queda da
gota: ele pode usar o seu relógio (que está em repouso em S) ou pode usar o relógio do referencial S 0 ,
supondo que ele possa ver tanto a torneira quanto o relógio. Suponha então que o nosso observador em S
tem em sua mão um cronômetro, assim que a gota começou a cair o relógio de S 0 marcava 0h00m00s e o
observador acionou o seu cronômetro. Ele continua observando a gota e o relógio de S 0 . Quando a gota
atingiu o chão, o relógio de S 0 marcava exatamente 1s (t0 = 1s) e nosso observador para o seu cronometro.
Observe que tanto o nosso observador em S, quanto alguém em S 0 , concordam com o fato de que a gota
atingiu o solo em t0 = 1s. Neste momento ele olha para o seu cronômetro e ele marca um tempo:
t = t0 = 2
1 = 2s :
Observe que, obviamente, toda a descrição acima não depende de quem você chama de S e S0. Relógios
em movimento andam mais devagar. Ou seja, se existe um observador A com um relógio no pulso (i.e.,
está parado em relação ao relógio) e um outro observador B que vê A se movendo com velocidade v. Para B
este relógio se moverá mais devagar do que para A. Na verdade, tudo que A …zer, ou que se mover com ele,
parecerá estar em câmera lenta.
29
Para tirar a mesma conclusão acima usando diretamente as TL (7) imaginamos que A (e o relógio) está
no centro do sistema S, ou seja, a coordenada do relógio no sistema sem linha é x = 0. Então o observador
B no sistema S 0 , que vê S se mover com velocidade v para a direita usará a transformação
t0 =
t
v (x = 0)
= t:
c2
Agora se B estiver no centro do sistema com linha (x0 = 0) e também tiver um relógio, o observador A, no
sistema sem linha, verá o relógio de B se mover com velocidade v para a esquerda. Com isso, A pode usar
a transformação
v (x = 0)
( v) x
=
t0 +
= t0 :
t=
t0
2
c
c2
Ou seja, se os relógios de A e B um dia estiveram sincronizados (foram produzidos e ajustados no mesmo
referencial, que pode ser diferente de S e S0), então A dirá que o relógio de B anda mais devagar e, ao mesmo
tempo, B dirá que o relógio de A anda mais devagar.
Vejamos uma conseqüência deste fenômeno. Um méson- (muon) é uma partícula elementar parecida
com o elétron (carga e spin), porém um pouco mais pesada, que se desintegra espontaneamente devido a
interação fraca, decaindo num elétron e num neutrino
!e +
e
+
:
Esta partícula pode ser produzida em laboratório e seu tempo médio de decaimento é de 2:2 10 6 sec.
Estas partículas são produzidas também por raios cósmicos ao atingirem a atmosfera terrestre. Isso ocorre
em altitudes superiores a 10Km. Pelo tempo médio de vida do , com a energia com que estes raios cósmicos
são produzidos, ele poderia percorrer distâncias da ordem de 600m. Entretanto, alguns destes produzidos
na alta atmosfera atingem a superfície da terra (i.e., viajam mais de 10Km). A resposta para este enigma
é que alguns destes criados pela radiação cósmica possuem velocidades próximas a da luz (o que pode
ser medido no momento da detecção). Enquanto no referencial do sua vida é de apenas 2:2: s, quando
vistos da terra este tempo se dilata o su…ciente para que ele alcance a terra. Mesmo que o mecanismo de
desintegração dos ’s não seja conhecido, e di…ra completamente dos efeitos eletromagnéticos, sabemos que,
por obedecer ao princípio da relatividade, este mecanismo será mais lento para um em movimento.
Remark 17 Um ponto a se observar no desenvolvimento acima é que, apesar da velocidade da luz não
depender da fonte a direção do feixe de luz depende do observador. Este efeito é chamado de aberração.
Para evidências experimentais da dilatação do tempo, consulte:
G. Gwinner, Experimental Tests of Time Dilation in Special Relativity, Mod. Phys. Lett. A, 20, no.
11 (2005), pg 791.
30
2.7
Simetria das transformações
Um ponto a se notar, o qual a primeira vista parece gerar uma série de paradoxos, é a simetria presente nas
transformações de Lorentz. Se invertermos as relações (7) obtemos
x=
(x0 + vt0 ) ;
y = y0 ; z = z0 ;
t=
t0 +
vx0
c2
:
(13)
O que obviamente representa apenas a troca do sinal da velocidade v, pois, se um referencial vê o outro ir
para a direita, o outro vê o primeiro ir para a esquerda (lembrando sempre que não faz sentido falar em
qual realmente se move). Uma conseqüência das relações acima é que, cada referencial vê um relógio no
outro referencial andar mais devagar.
Este fato, a princípio, parece estar em con‡ito com o primeiro postulado. Um exemplo famoso é o chamado
“paradoxo dos gêmeos”: dois irmãos gêmeos trabalham no programa espacial, um deles como astronauta
o outro como operador de terra (ground control ). A primeira missão acontece no aniversário dos gêmeos,
completando então 30 anos. O controlador se despede do seu irmão que decola na nave. A nave viaja por 10
anos contados na terra, com uma velocidade que, apenas para facilitar as contas, vamos supor o …ctício valor
p
de v = 3c=2. Assim, o irmão que …cou na terra vê o tempo dentro da nave andar mais devagar, de sorte que
cada 2 anos passados na terra corresponde a apenas 1 ano dentro da nave. Então, quando seu irmão retorna,
após dez anos terrestres, ter-se-ão passados apenas 5 anos para o astronauta. Ou seja, o irmão gêmeo na
terra terá 40 anos enquanto o seu irmão astronauta terá apenas 35! Agora, uma análise ingênua das relações
inversas acima pode levar a seguinte a…rmação: para o astronauta quem se move é a terra (se afastando da
nave), então é o relógio de quem …cou na terra que anda mais devagar. Assim, quando ele voltar para a terra
o seu irmão é que terá 35 e ele 40.
Exercise 18 Mas, quando eles realmente se encontrarem, qual deles terá razão?
Antes de prosseguirmos vamos olhar para outro exemplo completamente equivalente ao problema acima,
mas onde não precisemos comparar idades. Voltando ao exemplo da nossa torneira gotejante, imagine que
tanto na nave S0 quanto na terra S existe ao lado do relógio uma torneira que goteja num balde a uma taxa
de 1G=h (lembre-se que ambos os observadores concordam com esta taxa para a sua torneira). Suponha
também que a nave viaja com = 2 e depois de 1 hora (medidos na terra) reverte instantaneamente o seu
motor e retorna à terra com a mesma velocidade. Quanto o observador na terra (B) olha a ocorrência do
fenômeno da reversão dos foguetes da nave depois de t = 1h o relógio na nave marca t0 ,
t = t0 =) t0 =
1
31
t=
1
1
1= h:
2
2
Então, enquanto B vê uma gota cair no seu balde, ele constata que em S0 nenhuma gota caiu. Depois
do retorno da nave B vê seu relógio marcar t = 2h (i.e., outra gota caiu no seu baldo) enquanto o relógio
1 0
da nave marcará t =
t = 1h, i.e., a primeira e única gota acaba de cair no balde na nave. Assim B
espera que ao comprar os baldes, o seu balde tenha 2 gotas enquanto o balde na nave terá apenas 1. Da
mesma forma como no paradoxo dos gêmeos, se mudarmos para a descrição de um observador A na nave,
numa primeira análise poderíamos esperar que A a…rmasse que a viagem demorou 2h (e ele teria duas gotas
no seu baldo) enquanto um relógio na terra (para ele em movimento) marcou apenas 1 hora de viagem e,
conseqüentemente, apenas uma gota teria cído no balde da terra. Assim, quando eles se encontrarem, A
esperaria 2 gotas no seu balde e apenas 1 gota no balde da terra. Repetindo a pergunta anterior: quem está
com a razão?
O ponto aqui é que para retornar a terra o astronauta teve de mudar sua velocidade e, conseqüentemente,
sofrer aceleração. Quando isso ocorreu o seu referencial deixou de ser inercial, de sorte que ele não pode mais
usar as suas medidas (seria como aplicar as leis de Newton num vagão acelerado). Desta forma, apenas o
referencial de quem …cou na terra é inercial em todo o processo e apenas este pode usar diretamente a TRR.
Ou seja, a TRR diz que o irmão que …cou na terra está certo e seu irmão astronauta estará mais novo. A
análise do ponto de vista do referencial não inercial pode ser feita se usarmos o conceito de tempo próprio,
que será introduzido posteriormente.
Uma outra questão interessante no exemplo das gotas no balde acima é: se B (na terra) a…rma que os
foguetes de A (na nave) foram revertidos em t = 1h. A que horas num relógio de A isto ocorreu? Vamos
simpli…car este exemplo com apenas uma viagem de ida e uma forma mais simples de comparar os relógios.
Imagine que um observado tem um cronômetro e passa por ele (atirado por algém) um outro relógio com
= 2. Quando os dois relógios se encontram eles estão sincronizados com t = t0 = 0 e o cronômetro é
p
acionado. O observador sabe que a uma distância de 3=2m existe uma parede e o outro relógio irá se chocar
com ela depois de t = 1s. Quando o relógio viajante se choca com a parede ele pára de funcionar. Neste
momento o observador para o seu cronômetro (que marca t = 1s) e caminha até o relógio quebrado.
Exercise 19 Quanto marca o relógio quebrado?
Pelo que foi dito antes, o relógio quebrado sofreu aceleração, mas o nosso observador permaneceu sempre
num referencial inercial, ou seja, o nosso observador sabe a veradede. Assim, usando o ponto de vista do
nosso observador, o relógio terá parado as
t = t0 =) t0 =
1
t =) t0 =
1
s:
2
Observe que alguém que viajasse com o relógio também veria este parar porque bateu na parede. Assim,
para quem viaja com o relógio o choque aconteceu 1=2s (e não 1s) depois que os dois relógios se encontrarão.
Como um observador B que caminha junto com o relógio, i.e., que bateu na parede e sobreviveu, explicaria
32
a marcação dos relógios quando estes se encontrassem5 .
Apesar de podermos calcular todos os ocorridos, a descrição rigorosa deste fenômeno exclusivamente
pelo ponto de vista do referencial que sofreu aceleração está fora do escopo da TRR. Mas pela experiência
adquirida com a teoria da relatividade geral sabemos que o oservador B veria o relógio de A andar mais
devagar até o choque com a parede. Assim, no momento do choque o relógio de A visto por B marcaria
(lembrando que para B o choque ocorreu em t0 = 0; 5s)
t0 = t =
1
1
1
s =) t = t0 = s :
2
4
Ou seja, o relógio de A estava ainda mais atrasado. Entretanto, durante o processo de desaceleração, B
veria o relógio de A andar mais rápido (tão mais rápido quanto maior a aceleração) de sorte que, durante
a desaceleração o relógio de A passaria o relógio de B e, quando ele …nalmente parasse o relógio de B teria
conseguido atingir os 1s.
Exercise 20 Alice embarca numa nave, deixando seu irmão gêmeo Bob na terra, e viaja por 2; 2 108 s (' 7
anos) do tempo dela, com uma velocidade de 0; 96c. Após este período ela (instantaneamente) reverte a
direção de seu foguete e retorna a terra (com a mesma velocidade). Quem será o mais velho dos irmãos e
qual a diferença na idade?
Testes realizados com relógios atômicos, inicialmente sincronizados, con…rmam a hipótese discutida acima.
C. W. Sherwin, Some Recent Experimental Tests of the ’Clock Paradox’, Phys. Rev. 129 no.1 , pg 17
(1960)
J. Hafele, R. Keating, Around the world atomic clocks:observed relativistic time gains, Science Vol. 177
pg 166 (1972)
5 Lembre
que o cronômetro foi parado antes do observador A se movesse, de sorte que seu movimento é irrelevante.
33
2.8
Sobre o espaço
O efeito da contração do espaço, ou contração de Lorentz, já foi discutido no experimento de MM. O único
ponto é que na TRR este efeito não deve ser interpretado, como fez Lorentz, como uma modi…cação na
estrutura da matéria devido a fenômenos eletromagnéticos (o que poderia não ocorrer para outro tipo de
forças), mas sim como um efeito sobre o próprio espaço.
Vamos ver um pouco melhor como este efeito é descrito pelas TL.
A segunda linha de (7) a…rma que não há mudanças nas coordenas, e conseqüentemente nos comprimentos,
perpendiculares ao movimento. Este fato já foi usado na análise da dilatação do tempo do relógio
de luz. A invariância das distâncias perpendiculares ao movimento é, na verdade, uma conseqüência direta
do primeiro postulado. Usando um exemplo de Taylor e Wheeler (Spacetime Physics): Imagine um trilho
reto, um trem que se move com velocidade v sobre ele e um túnel. Pode um observador na terra (S) (em
repouso com o túnel) observar alguma contração na altura do trem ou, por outro lado, alguém no trem (S 0 )
observar contrações na altura do túnel? Para veri…car tal coisa bastaria, no sistema em repouso com o túnel,
se construir o trem exatamente da altura do túnel. Se houver uma contração perpendicular ao movimento
para um observador no trem o túnel irá se contrair e o trem não poderá passar por ele, causando assim um
desastre calamitoso. Por outro lado6 , alguém em repouso com túnel veria a altura do trem se contrair e ele
passaria pelo túnel sem dano algum. Entretanto, o fato de passar ou não pelo túnel é uma realidade física que
deve ser compartilhada por todos os observadores. Isso só é possível se não houver nenhuma contração
na direção perpendicular ao movimento. Vejamos agora os outros dois membros da transformação.
Suponha um vagão de trem de comprimento L com um espelho em uma das laterais. Se um sinal de luz
é emitido do lado oposto ao espelho, para um observador A num referencial S para o qual o vagão está em
repouso, o feixe de luz retornará a fonte num tempo:
t=2
L
:
c
Agora vamos analisar o mesmo experimento do ponto de vista de um observador B, num referencial S 0
para o qual S se move com velocidade v. Para este observador o tempo total de viagem do feixe é a soma do
tempo t01 para ir da fonte ao espelho e t02 para ir do espelho para a fonte. Calculando a distância percorrida
pela luz nestes dois tempos temos
ct01 = L0 + vt01 =)
ct02 = L0
6 Lembre-se
vt02 =)
L0
(c
v)
= t01
L0
= t02
(v + c)
que, pelo primeiro postulado, devemos esperar uma simetria nos efeitos.
34
Figure 4: Observe que esta …gura apresenta quantidades com e sem linha. Você jamais pode comparar
geometricamente estas quantidades. Ou seja, a …gura não representa a visão de nenhum dos observadores.
onde L0 é o tamanho do vagão para o observador B. Assim, a distância total percorrida pela luz para B vale
c (t01 + t02 ) = c
L0
2
= 2L0
L0 =
c
2
2
1
(c
v)
1
1
v2
c2
+
1
(v + c)
= 2L0
2
= cL0
1
c2
1
v2
c2
(2c)
= ct0 ;
t0 ;
onde t0 = t01 + t02 é o tempo total do percurso (medido por B) no sistema S 0 . Agora, pela dilatação do tempo
sabemos que:
c
L
L
t0 = t = 2 =) L0 = 2 2 ;
c
2
c
ou
L0 =
1
L:
Ou seja, o tamanho do vagão quando visto por B é menor que o valor medido por A. Esta é a contração de
Lorentz. Apesar do valor obtido ser o mesmo da hipótese de Lorentz sobre a contração do experimento de
MM, este resultado é conceitualmente muito diferente.
Vejamos como o resultado acima se relaciona com as TL. Suponhamos agora o observador A marcou um
certo ponto P dentro do vagão que dista de x do início do vagão. Se ele usar um sistema de coordenada
que tem origem no inicio do vagão, poderá identi…car x = x. Ou seja, x é a coordenada de um ponto do
sistema S que tem o início do vagão como origem. Se o observador B em S 0 quiser identi…car este mesmo
35
ponto (uma entidade física, ou geométrica), sabendo que o início do vagão esta a uma distância vt0 + x00 ,
onde x00 a distância inicio do vagão ao centro do sistema S 0 no instante t0 = 0, temos
x0 = vt0 + x00 +
x0 = vt0 + x00 +
1
x = vt0 + x00 +
1
x:
Agora, se os dois referenciais concordarem em começar a contar o tempo quando as origens
dos referenciais se encontrarem, ou seja, quando o inicio do vagão passar pela origem do sistema S 0 ,
então x00 = 0 e lembre que x = x. Com isso, isolando todos os termos com linha,
x=
(x0
vt0 ) :
Que é o primeiro termo das TL em (7), com o sinal da velocidade devidamente ajustado7 . Vemos então como
a linguagem de réguas e relógios se traduz na linguagem das transformações de Lorentz.
É interessante agora analisar o problema do decaimento do novamente. Suponha que você é o , ou
pelo menos esteja num referencial que se move juntamente com o , para você não há a dilatação do tempo
descrita anteriormente e o viverá apenas 2:2 s.
Exercise 21 Problem 22 Como, neste tempo, você conseguirá viajar do topo da atmosfera até a superfície
terrestre?
No referencial do , o espaço medido por alguém na terra se contrai pelo efeito descrito acima. Assim, se
para alguém na terra o viajou 10Km (durante mais de 2:2 s), para o ele viajou apenas 600m (durante
2:2 s).
Até o momento não existe nenhum teste experimental direta da contração da do comprimento dos objetos8 . Uma vez que a medida do comprimento de objetos em movimento, com a precisão necessária para a
comprovação, está aquém das tecnologias atuais. Entretanto, uma série de evidências indiretas deste efeito
pode ser observada. Um exemplo simples é o seguinte:
Um …o que carrega uma corrente estacionária pode ser considerado praticamente neutro, quando observado
de um referencial onde o …o está parado. Uma vez que os elétrons em movimento se deslocam por uma rede
de átomos com carga contrária. Isso pode ser comprovado pelo fato de cargas em repouso (em relação ao …o)
não sofrerem nenhuma in‡uencia deste. Agora, se analisarmos o comportamento de uma carga que se move
com velocidade constate, igual a dos elétrons na corrente9 , e paralela ao …o, devemos esperar que o campo
magnético gerado pela corrente in‡uencie o movimento da carga pela força de Lorentz. Esta é a descrição de
um observador em repouso com o …o sobre o deslocamento (e conseqüentes forças) da carga.
Entretanto, um observador que se desloque juntamente com a carga, verá uma contração na distância
entre as cargas positivas (paradas na rede em relação ao …o). Conseqüentemente a densidade de cargas
7É
crucial que você saiba identi…car as quantidades em cada problema, sem se “bitolar” nas expressões.
exemplo a seguir e esta a…rmação foram retirados de:
http://math.ucr.edu/home/baez/physics/Relativity/SR/experiments.html
9 Lembrado que a velocidade dos elétrons é de alguns milímetros por segundo.
8O
36
positivas será agora maior que as negativas e uma força elétrica agirá na carga. Por outro lado, como a carga
está em repouso para este observador, nenhuma força magnética é esperada. Assim, este observador
descreve as forças que agem sobre a carga, apenas como um efeito da força elétrica. Esta última força
foi prevista usando a contração de Lorentz e o resultado confere com o experimento. Esta é uma evidência
(indireta) de que a contração ocorre.
(Pode ser medido experimentalmente)
Um ponto importante deste experimento é que, devido a enorme intensidade das forças eletromagnéticas
envolvidas, o efeito pode ser veri…cado e medido mesmo para velocidades muito baixas e, conseqüentemente,
este tipo de experimento pode ser facilmente implementado no laboratório. Para uma descrição mais detalhada veja: Purcel, Electricity and Magnetism.
2.9
Simultaneidade
Nas seções anteriores vimos como a exigência de que um certo fenômeno tenha uma "realidade física" nos
permite obter vário resultados da TRR. Por exemplo, quando falamos da não contração das componentes
ortogonais ao movimento. Entretanto, a a…rmação de que algo possua uma realidade física precisa ser
analisada com muito cuidado na TRR. Antes de Einstein poucas pessoas duvidariam que a a…rmação “isso
aconteceu no mesmo instante daquilo”, ou “aquilo aconteceu no mesmo lugar disto”, possui uma
realidade física. Porém, vejamos o seguinte exemplo:
Imagine um celeiro (ou uma garagem) e uma escada. A escada foi construída para caber exatamente no
celeiro. Ou seja, num referencial em que ambos estão parados, ambos têm comprimento L, Figura 3-a. O
celeiro possui duas portas automáticas, uma de cada lado. Estas portas possuem um relógio onde se pode
programar o momento do fechamento e da abertura. Ambas as portas do celeiro estão abertas e a escada é
introduzida com velocidade v. Quando a escada está dentro do celeiro, ambas as portas se fecham e tornam a
abrir rapidamente. Para uma pessoa dentro do celeiro, que vê a escada se mover com velocidade v, a escada
1
sofre uma contração de Lorentz e passa a ter um comprimento
L < L (Figura 3-b). Assim, quando
ambas as portas se fecharem a escada cabe (com folga) dentro do celeiro. Ou seja, para a pessoa dentro do
celeiro a escada entrou no celeiro, as portas se fecharam e abriram e a escada saiu. Depois do experimento
todos os componentes saíram ilesos. Agora, para a pessoa que carrega a escada, que vê o celeiro se mover
com velocidade v, quem sofre a contração de Lorentz é o celeiro. Assim, como a escada tem agora um
comprimento L maior que o celeiro ( 1 L), está não caberá no celeiro. Então, quando as portas se fecharem
ou a escada será cortada ou as portas irão se quebrar, de sorte que um dos componentes será destruído.
Exercise 23 Problem 24 Como só pode haver uma realidade física, o que acontece então com a escada e
o celeiro?
Primeiramente é preciso notar que o problema acima está mal colocado, pois a descrição da montagem
do experimento não faz referencia a nenhum observador em especial. Vamos analisar o problema com todos
os detalhes necessários.
37
Figure 5: .
Figure 6: .
(É possível para alguém no celeiro preparar o experimento)
Para montar o problema, primeiro vamos a um fato: exceto pelo problema técnico de desenvolver dispositivos rápidos o su…ciente, é possível para alguém no celeiro programar as portas para abrirem e fecharem
quando a escada estiver lá dentro (desde que ele saiba a velocidade da escada e sua posição em algum instante). Isso é um fato e signi…ca: se o homem no celeiro preparou tudo corretamente, a escada
coube no celeiro. Assim, se o experimento foi bem preparado por alguém no celeiro, precisamos então
entender como, no referencial da escada, ela também coube. Chamemos o referencial onde o celeiro está
parado de S e o referencial da escada de S 0 . Ou seja, sabemos o que aconteceu no referencial S e queremos
saber o que aconteceu em S 0 . Ou ainda, queremos saber como uma seqüência de eventos que ocorreu
no referencial S é vista no referencial S 0 .
Na preparação do experimento uma pessoa em S sabe (porque ele conhece todos os dados do experimento)
que o …nal da escada (parte mais a esquerda) vai passar pela porta de entrada exatamente às t = 0h.
Então primeiramente ele veri…ca se os relógios estão sincronizados e, em seguida, programa-os para abrir e
fechar exatamente as 0h.
Para facilitar a descrição, vamos chamar a porta de entrada (a porta da esquerda) de porta 1 e a de
saída (a direita) de porta 2. Além disso, no referencial S (no celeiro), chamamos de x = 0 a coordenada do
início do celeiro (porta 1), de x1 a posição da porta 1, x2 a posição da porta 2, t1 o instante que a porta 1
38
fechou, t2 o instanate que a porta 2 fechou, x0 (t) o …nal da escada e t0 o instante em que o …nal da escada
passou pela porta 1.
Para o observador do referencial S, existe a seguinte seqüência de eventos:
1. A porta 1 em x1 se fecha no instante t1 = 0 , ou seja, o evento a porta da esquerda se fechou tem as
coordenadas (x1 = 0; t1 = 0);
2. Neste mesmo instante a porta 2 (no ponto x = L) se fechou. Ou seja, o evento porta da direita se
fechou tem as coordenadas (x2 = L; t2 = 0).
3. O inicio da escada (parte mais a esquerda) passa pela porta 1 em t0 , (x0 = 0; t0 = 0);
Remark 25 Observe que para o observador em S os eventos 1 e 3 possuem as mesmas coordenadas.
Mas, mesmo assim, descrevem eventos diferentes.
Como …cam estas coordenadas (que descrevem estes eventos) quando passadas para o sistema linha.
Primeiro vamos acertar as medidas do nosso referencial, ou seja, combinar onde …cam as origens espaciais e sincronizar os relógios em algum instante especí…co. Lembre-se que isto é sempre necessário
para que as TL possam ser usadas. A pessoa que carrega a escada, no referencial S 0 , chamou de x0 = 0 do seu
sistema o início da escada (parte mais a esquerda). Esta pessoa também tem um relógio e, para comprara
sua medida com a do outro observador o sincronizou da seguinte forma:
1. ele foi até o ponto x0 = 0 e
2. quando este ponto (o inicio da escada, ou a parte mais a esquerda) passou pela porta de entrada ele
leu o relógio de S, que está exatamente neste ponto, e ajustou seu relógio com este valor. Observe
que ele leu um relógio de outro referencial, mas que estava exatamente no ponto onde ele
estava.
39
Esta é a sincronização dos referenciais descrita anteriormente. Feito isso temos que ambos os referenciais
concordam com o evento: o …nal da escada x0 = 0 passou pela entrada do celeiro x = 0 no instante t = t0 = 0.
Fazendo isso os zeros dos dois referenciais coincidem.
Assim, no referencial S 0 , temos o evento:
a) O início da escada passou pela porta 1 em (x00 = 0; t00 = 0).
b) A porta 1, na posição x01 (t0 ), se fechou no instante t0 = 0, (x01 = 0; t01 = 0) :
Novamente os eventos acima possuem a mesma coordenada, mas descrevem coisas diferentes. Observe
que o evento (a) acima é o mesmo que o evento 3 no referencial S e que o evento 1 é o mesmo que (b). Ou
seja, ambos os referenciais concordam quanto as coordenadas dos eventos "o início da escada passou pela
porta de entrada", "A porta 1 se fecha".
Vamos agora usar a transformação de Lorentz (7) para responder uma série de perguntas do ponto de
vista do referencial S 0 . Lembrando que as expressões obtidas em (7) descrevem o problema: Um referencial
S 0 que se move para a direita com velocidade v em relação ao referencial S (se você mudar quem é S e quem
é S 0 terá de inverter o sinal de v).
Perguntas:
1. Quando o início da escada chegou na porta de entrada (evento (a) conhecido: (x00 = 0; t00 = 0)) onde
estava a porta 2 (ou o …nal do celeiro10 ) x02 (t0 ), i.e, a porta de saída? Ou ainda, onde estava o …nal do
celeiro no instante t0 = 0? Ou qual o evento (x02 =?; t0 = 0)?
Temos a nossa disposição as tranformaçõs
x02 =
(x2
v:t) ; x2 =
(x02 + v:t0 ) ;
e queremos calcular (x02 =?; t0 = 0). Como conhecemos t0 obviamente podemos usar a segunda destas
expressões11
x2 = (x02 + v:0) ) x02 = 1 x2 = 1 L :
Esta primeira equação é o fato que já sabíamos que celeiro se contraiu e a porta de saída não está mais
1
em L mas sim em
L.
IMPORTANTE: Um erro comum no cálculo acima é acreditar que, como os relógios dos referenciais
foram sincronizados em t = t0 = 0, então podemos usar t = 0 e, consequentemente, x0 = (x v:t) (já
que conhecemos t). Mas o ponto aqui é que (x = 0; t = 0) = (x0 = 0; t0 = 0), i.e., os relógios só estão
sincronizados na origem dos sistemas de coordenada. Queremos saber onde um observador em
1 0 Como x é a posição do …nal do celeiro no referencial S estamos chamando esta coordenada em S 0 de x0 , mas lembre-se
2
2
que, como S 0 vê o celeiro se mover, está coordenada é diferente em cada instante do tempo. Então, enquanto em S
0
0
0
podemos falar de uma coordenada x2 , em S temos de falar sempre de x2 (t )).
1 1 Lembre-se que, diferente do que ocorreu no caso do foguete, onde devíamos usar apenas o referencial da terra, pois só este
era inercial, agora ambos os referências são inerciais e, portanto, podemos usar arbitrariamente qualquer um deles.
40
x0 = 0 vê a porta 2 no instante t0 = 0. Todos os relógios em S 0 , em especial o que se encontra na
posição da porta 2, estão sincronizados para este observador. Porem, quando o observador em S 0 olha
para os dois relógios em S (um em cada porta) no instante de interesse, apenas o relógio da porta 1
está marcando t = 0. O relógio em x = L (o ponto de interesse em S visto de S 0 ) marca um tempo
diferente, como veremos a seguir.
2. Quando, num relógio em S 0 , a porta 2 do celeiro se fechou? Quanto vale t02 sabendo que (x2 = L; t2 = 0)
(evento conhecido 2)?
Novamente temos a nossa disposição duas relações:
t=
t0 +
vx0
c2
; t0 =
vx
c2
t
Como conhecemos os valores no referencial sem linha usamos:
t02 =
t2
vx2
c2
) t02 =
vL
6= 0 :
c2
Este é o tempo que um observador no referencial S 0 lê no relógio que está na porta 2 do celeiro quando
0
esta se fecha. Esta segunda equação nos diz que a porta de saída fechou e abriu em t02 =
vL=c2 < t0 =
0. Ou seja, enquanto o observado em S viu as duas portas fecharem ao mesmo tempo, um observador
em S 0 viu primeiro a porta de saída fechar em t02 =
vL=c2 e, só depois, a porta de entrada fechar
em t01 = 0.
Concluindo, o observador que carregava a escada viu: as duas portas do celeiro estavam abertas; a ponta
da escada entrou no celeiro e, antes de chegar na porta de saída, esta se fechou e tornou a abrir (mas a porta
de entrada permaneceu aberta), Figua 6-a; o …nal da escada entrou no celeiro e a porta da entrada se fechou
e tornou a abrir (mas a porta de saída permanecer aberta), Figura 6-b. Desta forma, a escada (mesmo para
quem a empurrava) pode entrar e sair ilesa do celeiro sem destruir as portas.
Na verdade, sabemos que a porta de saída fechou antes da porta de entrada. Entretanto, isso não prova
que a escada não foi dani…cada. Lembre que a escada é maior que o celeiro, então, mesmo que seu inicio
ainda não tenha passado pela porta 1, seu …nal já pode ter atingido a porta 2. Para efetivamente provar
que a escada não se dani…cou, temos que mostrar que, quando a porta de saída se fechou nenhum pedaço da
escada estava nesta posição.
vL=c2 o …nal da escada
Exercise 26 Mostre que quando a porta de saída do celeiro se fechou em t02 =
0
em xf = L ainda não tinha chegado na porta de saída.
Hint: no referencial S 0 o …nal da escada está (sempre) em x0f = L, basta mostrar que em t02 a coordenada
em S 0 da porta 2 e maior que a coordenada do …nal da escada, x02 > x0f ).
41
Figure 7: .
Enquanto o fato “a escada entrou e saiu (ilesa) do celeiro”, permanece válida para ambos os observadores
(conservando, neste sentido, a sua realidade física), a a…rmação “as portas do celeiro se fecharam ao
mesmo tempo”só é válida para o observador do celeiro. Um observador que carrega a escada (que também
merece a sua credibilidade) vai garantir (com provas) que a porta de saída abriu antes da de entrada.
Assim, o conceito de simultaneidade não possui mais uma realidade compartilhada por todos os
observadores em TRR. Como já vimos (e continuaremos vendo com o desenvolver das idéias), o mesmo
acontece com a a…rmação “isso ocorreu a uma certa distância daquilo”.
42
2.10
Sincronização de relógios e observação
O exemplo da seção anterior deixa claro o fato já citado que relógios sincronizados num certo instante
não estarão mais sincronizados em outros instantes. Mas, antes de entrar nos detalhes deste fato,
vamos tentar explicar melhor o que signi…ca uma a…rmação do tipo: “o observador em S ‘vê’um evento”,
ou, “um observador em S ‘lê’um relógio em S 0 ”.
No sentido usual, para um observador ver um evento, e.g., um relógio, num ponto distante este relógio
precisa ser iluminado e a luz re‡etida para o observador. Isso demora um certo tempo. Com isso, da mesma
forma que muitas estrelas que brilham hoje no céu já se apagaram, um observador jamais veria o horário que
relógio distante marca, mas apenas o horário que ele marcava em algum instante anterior. Quando falamos
em “ver” nas seções anteriores, não estamos falando deste tipo de observação.
O efeito do atraso descrito acima, apesar de real, insere em nossos observadores uma ignorância sobre as
coordenadas reais (num sentido que discutiremos) de um evento. Esta ignorância pode levar a interpretação
errônea de que os efeitos da TRR (discutidos anteriormente) são meras ilusões. Isso não é verdade, estes
efeitos são reais no sentido de que nenhum experimento poderia desmascará-los. Além disso, o sentido usual
de visão poderia depender do caminho que a luz faz do objeto até o observador. Ou seja, um observador
poderia ver um relógio olhando diretamente para ele, ou olhando para o seu re‡exo num espelho. Neste caso
a visão direta e a re‡etida marcariam tempos diferentes. Para eliminar estes problemas, gostaríamos de criar
um modelo onde um observador pudesse realmente “ver” o que ocorre num ponto distante.
Quando falamos da sincronização dos relógios no exemplo anterior salientamos que o observador na origem
de S 0 olhava para um relógio que, mesmo pertencendo ao referencial S, está exatamente naquele ponto.
O problema é que, como vimos, relógio perdem a sincronia com o movimento.
Imagine que o referencial S é um vagão de trem que possui uma janela em cada extremidade e está, ou
parado, ou em movimento constante, i.e., é um referencial inercial. Neste vagão temos duas pessoas A e B
que usam as coordenadas deste mesmo sistema S. Usar as mesma coordenada signi…ca que elas concordam
em chamar de origem o inicio do vagão e usam as mesmas réguas para medir distâncias. Além
disso, num dado momento elas se encontrar num dado ponto, e.g., o inicio do vagão, e sincronizam seus
relógios. Agora elas realmente compartilham o mesmo sistema de coordenadas.
As duas pessoas permaneceram no inicio do vagão até que um dia uma delas (A) resolveu olhar pela
janela no …nal do vagão. Ela andou até lá e presenciou o fato curioso de que um pássaro se chocou contra
o vidro da janela. Ela resolve então registrar este fato: o evento ocorreu em (x = L; t = T ). Então ela volta
para o início do vagão e conta isso para a pessoa que …cou lá parada e não teve a chance de presenciar o …m
trágico da ave. Depois de contar o fato e apresentar as coordenadas do evento, eles, por uma razão qualquer,
comparam de novo os seus relógio e observam, abismados, que estes não estão mais em sincronia. O que
aconteceu? Bem, quando o observado A se moveu para o …nal do trem, ele passou a estar em movimento
em relação ao observador B. Assim, visto de B, o relógio de A andou mais devagar e, conseqüentemente, se
desincronizou. O resultado disso é que se A tivesse simplesmente entregue para B as coordenadas do evento,
este tiraria uma conclusão completamente errada sobre o momento da morte do pássaro. Ou seja, uma vez
43
sincronizado os relógios os observadores não podem se mexer.
Como então B pode saber (com precisão) o que acontece em ambas as janelas do vagão? Tudo que ele
precisa fazer é, estando na janela no início do vagão, sincronizar o seu relógio com A que já está no …nal do
vagão. Para isso ele simplesmente instala uma lâmpada no meio do vagão (que tanto A como B concordam
onde é) e programa esta lâmpada para ascender depois de um certo tempo (su…ciente para que ambos se
dirijam a sua janela). Então, sabendo da constância da velocidade da luz, A combina com B: quando
o sinal de luz chegar até você (o que pode ser detectado com um sensor), marque zero no seu relógio que eu
farei o mesmo. Feito isso, sem que nenhum deles se mova, A registra todas as maravilhas que se passam no
…nal do trem e depois leva o relatório, com as respectivas coordenadas, para B. Quando A se moveu para
levar o relatório, eles perderam a sincronia dos relógios, mas, como B nunca se moveu e todos os eventos
foram registrados antes que A se movesse, todas as informações contidas no relatório possuem as coordenadas
corretas para B.
Exercise 27 Pense numa forma de sincronizar 3 relógios num referencial.
Então, a idéia aqui é que um observado só pode registrar o que ocorre no ponto onde ele está,
no momento em que ele está ali, e só pode se mover quando a experiência acabar. Assim, na
TRR, um referencial é uma in…nidade de observadores, cada um num ponto do espaço e com o seu próprio
relógio. Num dado instante todos estes relógios são sincronizados, usando a constância da velocidade da luz.
Feito isso, os observadores registram tudo que ocorre no seu posto e, apenas ao …nal do experimento, eles se
encontram e trocam informações.
Dizer “um observador em x = 0 vê um evento que ocorre em x = 5 num instante t = 0”, signi…ca que o
seu parceiro naquela posição registrou este evento. Isso é o que deve ser entendido por “ver” nos exemplos
anteriores.
Da mesma forma, referenciais diferentes podem trocar informações. Se um evento ocorre num ponto
(físico ou geométrico) do espaço que uma pessoa A em S chamou de x = 1 e registrou em t = 3, uma pessoa
B em S0 que está neste mesmo ponto, que para ela é, por exemplo, x0 = 10 registrou este evento no seu
relógio, por exemplo, em t0 = 5. Estas duas pessoas, que estão paradas em seus respectivos referenciais,
mas se movem uma em relação a outra, se encontram neste mesmo ponto físico e, sem abandonarem seus
postos, trocam relatórios. Isso é o que signi…ca “uma pessoa num referencial S vê um evento num referencial
S0”. É neste sentido que devem ser entendidas as relações das transformações de Lorentz.
A leitura de distâncias entre referenciais diferentes é bem mais sutil. O problema é que esta medida envolve
eventos em pontos distintos, mas sempre no mesmo instante para o referencial que faz a medida.
Alguém no referencial S0 (que se move com velocidade v para a em relação a S) carrega uma barra de 1
metro. Suponha agora que alguém em S quer medir esta barra. Primeiro ela escolhe um instante qualquer t,
neste instante todos os observadores em S olham para a barra. Um (e apenas um) destes observadores em S
vai ver o …nal da barra e outro o início. Quando a medição termina (após t) o observador que mediu o …nal
da barra pergunta para todos os outros quem, em t, viu o inicio da barra. Estes dois observadores, cada um
44
conhecendo a sua posição no referencial S no momento da medição, podem então dizer o tamanho da barra
vista de S.
De outra forma, suponha que em S0 a barra tem comprimento L0 e está parada em x0I = 0 e que os
referenciais sincronizaram seus relógios na origem. A medição em S foi realizada num instante t. Neste
instante (que deve ser …xado em S, porque ele está fazendo a medida) temos
x0I
=
(xI
v:t) = 0
x0F
=
(xF
v:t) = L0
Subtraindo estas expressões temos:
x0F
L0
x0I
0
=
(xF
v:t)
(xI
=
[xF
xI ]
=
[xF
xI ] =) [xF
v:t)
xI ] =
1
L0 = L :
1
Então, a razão de termos um fator para o tempo (dilatação temporal) e
para o espaço (contração
espacial) vem do fato das medidas de tempo ser feitas diretamente, mas as de comprimento estarem sujeitas
ao vínculo de simultaneidade no referencial que realiza a medida.
Imagine agora que a medida acima foi realizada de outra forma (completamente equivalente). Nosso
referencial S 0 pode ser um vagão cujo assoalho é uma grade. O observador em S, sabendo da sua necessidade
futura de medir a barra, preparou o seguinte dispositivo: ele instalou dois explosivos um de cada lado da
barra e programou os detonadores para acionar num mesmo instante t do seu referencial S (como veremos, na
verdade é muito difícil dizer como ele fez isso). Então ele está parado no seu referencial S e vê os explosivos
nas extremidades da barra no vagão explodirem no mesmo instante de tempo t (para facilitar a compreensão,
imagine que quando isso ocorreu ele estava no meio da barra). Como o piso do vagão é perfurado (uma grade)
a explosão chamuscou não apenas o piso do vagão (referencial S 0 ), mas também o chão onde o vagão passava
(referencial S). Como o observador em S sabe que os eventos da explosão ocorreram no mesmo instante t, ele
sabe que as marcas no chão correspondem exatamente ao tamanho da barra. Então ele mede esta distância
e obtém o tamanho L calculado acima. Mas lembre-se que o piso do vagão também foi marcado. Entretanto,
dentro do vagão a distância entre cada explosão é exatamente o comprimento da barra L0 (certamente ele
viu uma explosão em cada extremidade da barra e, para ele, a barra não se moveu). Mas o observador no
trem sabe que o chão foi chamuscado pelas explosões na barra. Como então ele explica que a distância entre
as marcas no chão vale L < L0 ?
45
Para responder a pergunta acima, observe também que no instante t temos
t0I =
t0I
t
t0F =
t0 =
xI v
; t0F =
t
c2
v
[xI xF ] =
c2
xF v
;
c2
v
1 0
v
L = 2 L0 ;
2
c
c
v 0
L :
c2
Isso signi…ca que os explosivos não foram detonados no mesmo instante para um observador em S0.
Ou, num processo geral de medida, visto do referencial S 0 as duas pessoas em S não registraram o tamanho
da barra no mesmo instante. A pessoa no inicio da barra fez o registro, mas, só depois de um tempo t0 , a
outra pessoa registrou o …nal da barra. Neste tempo o observador em S 0 sabe que a barra se moveu para S e
este movimento, juntamente com o atraso do medidor que registrou o …nal da barra, foi a causa da medida
contraída em S (esta é a explicação de um observador em S 0 , pois para os observadores em S a medida foi
realizada corretamente). Nesta descrição vemos que o observador em S 0 não considera as explosões como
uma medida de distância. Ou seja, o evento das explosões é uma medida de distância em S, mas não em S 0 .
Assim, como mencionamos anteriormente, um processo de medida requer eventos que ocorreram em tempos
iguais.
46
2.11
Efeito Doppler
Como mencionado anteriormente, os efeitos relativísticos não são notados no cotidiano. E, apesar de hoje
as energias envolvidas nas experiências terem a ordem de grandeza para que estes efeitos sejam relevantes,
inicialmente a melhor forma de se observar estes efeitos foi através de medidas astronômicas. Ou seja,
observando a luz de astros que se moviam com velocidades comparáveis a da luz. Vejamos que tipos de
efeitos devemos esperar destas observações.
A solução da equação de uma onda plana pode ser escrita como
exp i (k:x
!t) ; ! = 2 f ;
!
=V
k
onde f é a frequência, k o vetor de propagação cujo módulo é igual ao recíproco do comprimento de onda e
V a velocidade de propagação. A quantidade entre parênteses na expressão acima é a fase da onda.
Para um sinal luminoso (V = c) cujo vetor de onda está no plano x y, fazendo um ângulo com o eixo
x, temos
!t
k:x
= k:x cos + k:y sin
!
[x cos + y sin
=
c
!t ;
ct] :
Um sinal luminoso que se propaga na direção k, após um tempo t terá percorrido uma distância
r = ct ) x cos
+ y sin
= ct ) x cos
+ y sin
ct = 0 :
Ou seja, a frente de onda de um sinal luminoso emitido na origem em t = 0 percorrerá uma distância ct. O
mesmo é válido para qualquer parte da onda. Assim, para um sinal luminoso (no vácuo) a fase da frente de
onda vale
k:x !t = 0 :
Além disso, se este mesmo sinal for observado de um referencial S 0 que se move com velocidade v^
x em relação
0
0
a S, ele terá uma direção de propagação k e, após um tempo t terá percorrido a distância
r0 = ct0 ) x0 cos
0
+ y 0 sin
0
= ct0 ) x0 cos
0
+ y 0 sin
Assim, da mesma forma que antes, temos neste referencial
k0 :x0
! 0 t0 = 0 = k:x
47
!t
0
ct0 = 0 :
ou ainda
!0 0
[x cos
c
0
! [x0 cos
0
+ y 0 sin
0
0
0
0
+ y sin
!
[x cos + y sin
c
= ! [x cos + y sin
ct0 ]
=
0
ct ]
ct]
ct]
(14)
Usando agora as TL temos inversas
(x0 + vt0 ) ;
x=
y = y0 ; z = z0 ;
t0 +
t=
vx0
c2
:
temos
! 0 [x0 cos
!0 0
[x cos
!
0
! 0
[x cos
!
0
+ y 0 sin
0
ct0 ]
= !
0
+ y 0 sin
0
ct0 ]
=
0
+ y 0 sin
0
ct0 ]
= x0
(x0 + vt0 ) cos
x0 cos
+ y 0 sin
+ vt0 cos
+ y 0 sin
v
+ y 0 sin
c
cos
c
c t0
1
vx0
c2
vx0
c 2
c
t0 +
v
cos
c
ct0
Comparando os termos de cada componente temos
!0
cos
!
!0
sin
!
0
!
=
!
0
=
0
= sin
cos
;
;
v
cos
c
1
v
c
:
(15)
Especialmente da última expressão temos
f0 = f
1
v
cos
c
(16)
Esta mudança na freqüência do sinal luminoso quando observado de diferentes referenciais é chamado de
efeito Doppler 12 .
Exercise 28 Obtenha o efeito Doppler partindo da equação (14) usando as TL diretas (não as inversas como
…zemos acima) e mostre que você obtém a mesma expressão (16).
Vamos analisar um caso especí…co. Suponha que um sinal luminoso é emitido em S na direção x
^. Se S 0 se
1 2 Proposto
Christian Doppler em 1842.
48
move para a direita com velocidade v em relação a S (como supomos para obter as expressões acima), então
S 0 vê S se deslocar para a esquerda. Com isso, temos duas situações:
1. Antes de S passar por S 0 , i.e., quando S se move na direção de S0, apenas o sinal emitido na direção
x
^, ou seja, com = será visto por S 0 . Com isso
f0
= f
1
v
u
u
= ft
como
1+
1
v
c
v
v
cos ( ) = f 1 +
c
c
s
2
1 + vc
1 + vc
=
f
v
1 + vc
1 vc
c
> 1
v
c
=) f 0 > f ;
a frequencia aumenta, uma luz branca emitida em S será vista azul em S 0 , este é o famoso blue shift.
2. Depois de S passar por S 0 , i.e., quando S se afasta de S 0 , apenas o sinal emitido na direção x
^, ou seja,
0
com = 0 será visto por S . Com isso
f0
como
= f
1
v
u
u
= ft
1+
v
c
1
v
v
cos (0) = f 1
c
c
s
2
1 vc
1 vc
v
v =f
1+ c
1 + vc
c
> 1
v
c
=) f 0 < f ;
a frequencia diminui, uma luz branca torna-se mais vermelha, este é o famoso red shift.
Estes efeitos são muito usados para se medir a velocidade de corpos celeste. Em especial, o red shift de
galáxias distantes permitiu Hubble determinar que o universo está em expansão.
Problem 29 Mas como se conhece a freqüência original emitida pelos corpos celestes para saber que este
sofreu um red ou blue shift?
O ponto é que, como veremos no nosso curso de quântica, as linhas espectrais, i.e., a freqüência das
ondas emitidas pelos materiais são bem conhecidos. E, acreditando que a mecânica quântica vale em todo o
universo, sabemos a freqüência original da radiação emitida.
(efeito Doppler transversal)
Um ponto a se notar na expressão do efeito Doppler é que, mesmo para um feixe que se desloque perpendicular ao movimento dos referencias, = 900 observamos uma modi…cação na frequencia
f0 = f ;
49
conhecido como efeito Doppler transversal.
Remark 30 Na verdade, como 6= 0, podemos falar em dois tipos de efeito Doppler transversal. O
primeiro é o descrito acima, quando a fonte emite o sinal perpendicularmente = =2. O outro é quando
o observador vê o sinal emitido perpendicularmente 0 = =2. Neste caso, usando as fórmulas obtidas no
exercício anterior (quando você usou as TL diretas) temos
! = !0
1+
v
cos
c
0
) f0 =
1
f :
Observe que o efeito é completamente inverso ao descrito anteriormente. Enquanto no primeiro tínhamos
um blue shift, agora temos um red shift. Este red shift possui uma explicação bastante simples. No caso geral
do efeito Doppler tanto as contrações espaciais quanto a dilatação do tempo in‡uenciam, respectivamente,
no comprimento de onda e na freqüência. Entretanto quando o observador vê a onda perpendicular ao
movimento, apenas a dilatação do tempo é importante. Assim, se em S o período das oscilações vale T , para
S 0 ele vale T 0 = T , com isso
1
1
1
f0 = 0 =
= f :
T
T
2.12
Aberração
Voltemos agora para as primeiras equações em (15).
Se voltarmos para (15)
!0
cos
!
!0
sin
!
e substituirmos a última equação
0
=
0
= sin
!0
=
!
v
c
cos
;
;
v
cos
c
1
nas duas primeiras temos
cos
0
=
(cos
)
; sin
(1
cos )
0
=
sin
(1
cos )
;
=
v
c
ou ainda
tan
tan
0
2
0
2
=
=
r
s
1 cos
1 + cos
1+
1
0
0
tan
=
s
( + 1) [1 cos ]
=
(1
) [1 + cos ]
2
50
s
( + 1) sin2
(1
) cos2
2
2
A mudança da direção de um sinal luminoso quando observado por um referencial em movimento em relação
à fonte é chamado de aberração. A equação acima para a aberração da luz está presente no primeiro trabalho
de Einstein.
Como a tangente é uma função crescente, para o nosso caso de jvj > 0 temos que o observador em S0 verá
o feixe emitido com =2 < < com um ângulo maior, ou seja, o feixe se curva na direção do movimento.
Desta forma uma série de feixes com ângulos diferentes tendem a se concentrar na direção do movimento, ou
seja, haverá uma concentração da intensidade do feixe na direção do movimento. Para o caso limite v ! c
temos
0
0
! 1 =)
! =) 0 ! :
tan
2
2
2
Ou seja, todos os feixes se concentram na direção do movimento.
Quando uma carga é acelerada num movimento circular ela, como qualquer carga, irradia, esta radiação
é chamada de radiação cyclotron. Entretanto, quando a velocidade da carga acelerada se aproxima da
velocidade da luz, pelo fenômeno descrito acima, esta radiação se concentra na direção do movimento. Esta
radiação concentrada é chamada de radiação synchrotron.
Remark 31 Ambos os efeitos apresentando nas duas últimas seções concordam com as expressões clássicas
até primeira ordem em . Entretanto, no tratamento clássico, os casos em que a fonte se move ou que o
observador se move deve ser tratado separadamente, enquanto aqui na teoria relativística o tratamento é o
mesmo.
51
Figure 8: This is a …le from the Wikimedia Commons.
2.13
Adição de velocidades
Uma análise direta das TL mostra, primeiro, que estas expressões não estão de…nidas para v = c e, segundo,
para v > c elas produzem valores imaginários das coordenadas. Com isso, na nossa de…nição de referenciais
inerciais estamos supondo que nada atinge, ou ultrapassa, a velocidade da luz. Vamos tentar concluir
este mesmo fato diretamente das transformações.
Observe, primeiramente, que o segundo postulado é incompatível com a noção usual de soma de
velocidades. Por exemplo, suponha que o referencial S observa um referencial S0 que se move com velocidade
v = 0; 6c para a direita. Imagine agora que no referencial S 0 alguém disparou um projétil com velocidade
u0x = 0; 7c (que é possível pois ux < c). Pela noção usual de soma de velocidades, a pessoa no referencial S
veria este projétil com a velocidade de lançamento somada a velocidade do próprio referencial,
?
ux = u0x + v = 1; 3c > c ?!
O que, obviamente, é impossível na nossa teoria. Então, como se somam as velocidades na TRR?
Voltando ao nosso exemplo, o projétil foi lançado com velocidade u0x no referencial S 0 . Assim, pela
de…nição de velocidade, temos
dx0
dx
u0x = 0 ; ux =
;
dt
dt
52
usando agora as TL temos
x=
t=
(x0 + vt0 ) =) dx = (dx0 + v dt0 ) ;
v
x0 v
dt0 + 2 dx0 ;
t0 + 2 =) dt =
c
c
dx
ux =
=
dt
0
dt0 dx
dt0 + v
(dx0 + v dt0 )
=
0
dt0 + cv2 dx0
dt0 1 + cv2 dx
dt0
=
u0x + v
:
1 + cv2 u0x
Então, a velocidade ux observada no referencial S não é u0x + v, mas sim
ux =
u0x + v
6= u0x + v :
1 + cv2 u0x
(17)
Para as transformações inversas, como sempre, basta trocar o sinal de v.
Para os valores especí…cos no nosso problema temos
u0x = 0; 7c
v = 0; 6c
)
) ux =
0; 7c + 0; 6c
1; 3c
1; 3c
=
=
= 0; 91c < c :
0;6c
1 + 0; 42
1 + 0; 42
1 + c2 0; 7c
Da mesma forma, para qualquer valor com v; u0 < c (não importa quão próximos de c) teremos u < c. Esta
é a fórmula de adição de velocidades de Einstein.
Vamos agora estudar o caso de uma direção u0 = u0x ; u0y ; u0z arbitrária, ou seja, v continua da direção
x, mas os corpos em S 0 podem ter uma velocidade numa direção qualquer. Neste caso, usando exatamente
o mesmo procedimento acima, temos
uy
=
uz
=
u0y
dy
1
=
;
dt
1 + cv2 u0x
dz
1
u0z
=
:
dt
1 + cv2 u0x
Exercise 32 Obtenha as relações acima.
Imagine agora que em S existem dois observadores A e B. A possui uma arma capaz de lançar um certo
tipo de partículas e pode usar estas partículas para enviar um sinal para B. Então eles combinam que,
quando B receber (detectar) esta partícula ele inicia algum processo. Ou seja, A dispara, B recebe e inicia
o processo. Está é uma relação de causa e efeito. Suponha agora que estes projéteis que A lança têm uma
velocidade jux j > 0 (o projétil vai da esquerda para a direita), mas com ux = c;
> 1, i.e., viajam mais
rápido que a luz. Então, das relações acima sabemos que para um observador em S0 este mesmo projétil será
53
observado com a velocidade
u0x =
(ux + ( jvj))
1+
( jvj)
c2 ux
=c
jvj
c
jvj
c
c
jvj
(18)
Como v < c e > 1 o numerador é positivo. Dentre os referenciais possíveis, i.e., aqueles para os quais v < c,
existem alguns com:
c
c
c
<0)
< ) < jvj < c
(19)
jvj
jvj
Para estes referenciais temos
u0x
c2
=
jvj
jvj
c
c
jvj
<0:
Ou seja, para os referenciais que respeitam (19), que, apesar de não serem todos, são alguns, a direção do
projétil foi invertido. Assim, ou ele foi enviado de B para A, invertendo a relação de causa e efeito, ou ele
nunca tingirá B, de sorte que o efeito observado em S0 não será observado em S. Em ambos os casos temos
uma violação do primeiro postulado. Assim, como conseqüência do primeiro postulado, temos que nenhum
sinal pode ser enviado mais rápido que a luz e manter a relação de causa e efeito em todos os
referenciais.
2.13.1
Diagrama espaço-tempo e os tipos de intervalos
Um artifício muito usado para se analisar problema em relatividade é o diagrama de espaço-tempo. Neste
diagrama podemos plotar os eventos como pontos. Obviamente este diagrama não pode ser desenhado para
um espaço tridimensional, mas podemos ver como ele funciona se limitarmos as dimensões espaciais do nosso
problema. Assim, para uma única dimensão, podemos registrar um evento que ocorreu num ponto x no
instante t como a …gura abaixo.
Obviamente o diagrama se refere a uma medida especí…ca de tempo e espaço e conseqüentemente é a
descrição de um referencial especí…co. Para este observador, a descrição de um objeto que permanece parado
com o passar do tempo é uma linha vertical. A visualização do diagrama é melhorada se mudarmos a escala
de tempo e não usarmos t, mas sim ct. Neste caso, uma entidade que se movesse na velocidade da luz
descreveria uma reta com uma inclinação de =4 (ou
=4 se a direção for x
^) e qualquer objeto que se
mova com velocidade u < c constante representa uma reta com ângulo maior que =4. A coleção de pontos
que descreve a história de um evento é chamada de linha de mundo.
Pelo que foi dito antes sabemos que a possibilidade de se estabelecer uma relação causal entre dois
pontos do diagrama está ligado ao fato de ser possível enviar um sinal luminoso entre estes pontos no tempo
disponível. Assim, o ponto mais distante que pode ser in‡uenciado num intervalo de tempo dt por outro deve
p
estar numa distância espacial dr = dx2 + dy 2 + dz 2 dada por
2
(cdt) = dx2 + dy 2 + dz 2
54
Introduzindo a noção de “distância”, ou intervalo, entre pontos no diagrama
ds2 = dx2 + dy 2 + dz 2
2
(cdt)
podemos classi…car então três tipos de intervalo
2
ds2
< 0 =) (ct) > dr2 (intervalo tipo tempo)
ds2
> 0 =) (ct) < dr2 (intervalo tipo espaço)
ds2
=
2
2
0 =) (ct) = dr2 (intervalos tipo luz )
1. O primeiro tipo de intervalo descreve pontos onde (ct)2 > dr2 , ou seja, pontos (no espaço 3D) cuja
distância (espacial) é menor que a percorrida pela luz num intervalo de tempo dt. Assim, este tipo de
intervalo caracteriza pontos que podem ter relações causais. Intervalos com esta característica são
chamados de intervalo tipo tempo;
2. Da mesma forma, intervalos do segundo tipo descrevem pontos cuja distância espacial é maior que
2
aquela que pode ser percorrida por um sinal luminoso no intervalo de tempo considerado (dr2 > (ct) ).
Este tipo de intervalo se chama intervalo tipo espaço e caracteriza pontos que não podem ter
nenhuma relação causal;
3. O último tipo de intervalo caracteriza pontos cuja distância espacial é exatamente aquela percorrida
2
pela luz ((ct) = dr2 ). Assim, este pontos podem ter relação causal exclusivamente por sinais que
trafeguem a velocidade da luz. Intervalos deste tipo são chamados de intervalos tipo luz ;
Suponha agora um evento que ocorra na origem do diagrama (o que só signi…ca que começamos a contar
o tempo a partir deste evento). Pelo que foi dito anteriormente, nenhum sinal emitido por este evento pode
55
ter velocidade maior que a da luz e conseqüentemente, este sinal deve ter um ângulo 3 =4 < < =4. Isso
signi…ca dizer que nenhum sinal emitido por este evento pode chegar nos pontos fora da região
de…nida pelo cone da …gura abaixo (chamamos de cone porque imaginamos que existem outras dimensões
espaciais).
Este é o cone de luz deste evento e apenas pontos dentro deste cone podem ser in‡uenciados ou in‡uenciar
este evento. De outra forma, dizemos que os pontos fora deste cone não possuem nenhuma relação
causal com o evento em questão.
Obviamente uma forma semelhante de diagrama pode ser desenhado na MC, tomando em conta as TG.
Mas, neste caso, se considerarmos diagramas de observadores diferente, tudo que podemos fazer é rodar e
deslocar o plano espacial, deixando sempre pararelo o eixo temporal (podemos também deslocar todo o plano
espacial ortogonalmente ao tempo, pois cada observador pode escolher set t0 , mas os eixos temporai serão
sempre paralelos). Com isso, um observador em qualquer sistema de coordenada concordará sobre
intervalos de tempo e simultaneidade. Além disso como não há limite para a velocidade de um sinal,
todos os pontos do diagrama podem ter uma relação causal.
Como já veri…camos na subseção 2.5.3 (“O segundo postulado e as TL”) as TL são exatamente aquelas
que deixam invariante a quantidade ds2 para qualquer referencial (8)
ds02 = ds2 :
Este resultado e o diagrama espaço-tempo, é uma ferramenta poderosa para se analisar um grande número
de problemas. Em especial, o paradoxo dos gêmeos. Primeiramente, como foi dito, precisamos escolher um
referencial bom, i.e., um referencial inercial. Neste caso, o referencial S da terra. Visto deste referencial, e
56
Figure 9: Carrol
colocando o evento do lançamento do foguete na origem do diagrama, temos o seguinte esquema para todo
o processo.
Observe que a distância entre pontos não é um intervalo no sentido usual, pois a coordenada temporal
entra em ds com sinal de menos. Mas deste diagrama podemos ver que o intervalo ds2AB vale
ds2AB = (dxAB = 0)
2
2
(cdtAB ) =
2
(cdtAB )
ou seja a quantidade
1 2
2
ds
= (dtAB )
c2 AB
é o tempo passado para os eventos registrado pelo gêmeo que …cou na terra. Apenas para acertar a questão
do sinal na expressão acima, vamos de…nir a quantidade
d
2
=
1 2
ds
c2
d
AB
= dtAB
com isso
é o tempo (no sentido usual) medido pelo gêmeo da terra. Obviamente
d
ABC
= 2dtAB =
o tempo total da viagem medido na terra.
57
t;
Da mesma forma o intervalo d
d
2
AB 0
1 h
2
= 2 (cdtAB 0 )
c
2
AB 0
vale
2
(dxAB 0 )
i
2
= (dtAB 0 )
com isso
d
AB 0
= dtAB 0
r
"
1
dxAB 0
cdtAB 0
2
#
2
= (dtAB 0 )
1
v2
c2
1
v2
= dtAB 0
2
c
1
Olhando para o diagrama vemos que (obviamente)
dtAB 0 = dtAB
Com isso
d
AB 0
=
d
AB 0 C
1
dtAB 0 =
1
dtAB :
Além disso, pelo diagrama, vemos que
1
1
= 2 dtAB =
t:
Onde, obviamente, t é o intervalo de tempo de todo o processo medido pelo observador na terra (que está
fazendo o diagrama).
Observe que estas duas quantidades são medidas pelo observador em S, ou seja, não estamos calculando
0
d mas apenas o d de duas linhas de mundo diferentes descritas pelo mesmo observador.
Agora se ds2 é invariante (i.e., o mesmo para todos os observadores), obviamente d 2 também o
é. Isso signi…ca que, o intervalo d 02 (ou ds02 ) calculado por alguém na nave (usando o seu sistema de
coordenadas S 0 ) entre os eventos a "nave saiu da terra" e a "nave inverteu os motores" vale
d
0
m
=d
AB 0
=
1
dtAB :
(20)
(onde m indica o meio da viagem). Observe que até aqui ambos os observadores são inerciais.
Agora no diagrama construído por alguém que esta na nave (por ser um refencial inercial é desenhado da
forma usual), a sua própria trajetória até a inversão dos motores (como ele está parado no seu referencial)
vale
i
1 h
2
2
0 2
0
d 02
=
(cdt
)
(dx
=
0)
= (dt0 ) ) d 0m = dt0m
m
c2
ou seja, pra ele o intervalo d
isso, usando (20),
0
m
é exatamente o tempo que marca o seu reglógio no meio (m) da viajem. Com
dt0m =
1
58
dtAB
Além disso, como o tempo da viajem de volta é o mesmo que o de ida (e os dois observadores concordam
com isso), temos que o tempo total da viagem vale
1
1
1
t0 = 2dt0m = 2 dtAB = dtABC =
t:
Ou seja, no …nal da viagem o relógio dele marcará um tempo
t0 =
1
t<
t;
e ele estará mais novo.
Obviamente este resultado dependeu do fato de termos usado o diagrama do observador S e convertido a
descrição de S 0 para este diagrama. Se usássemos o de S 0 tudo estaria invertido. Mas, como já vimos, apenas
o observador S pode usar as leis da RR em todo o percurso, pois a nave não se mantém no mesmo refencial
inercial sempre. Assim, o que …zemos aqui foi, já que não estamos num (único) referencial inercial usamos
a medida de alguém que permanece em um. Da mesma forma podemos tratar em RR referenciais
acelerados, imaginando que numa seqüência de tempo dt, ele passa de um referencial inercial para outro.
Obviamente poderíamos ter usado qualquer diagrama construído por um observador inercial. Esta é a idéia
por trás do tempo próprio, que veremos com mais detalhes no futuro.
2.13.2
O arrasto do éter
Mais um pouco sobre o éter: Antes de 1900 havia, entre outras menos populares, duas hipóteses sobre a
“viscosidade” do éter. A primeira é devido a G. Stokes (1845) que propôs que o éter era completamente
arrastado pelos corpos, de sorte que nenhuma velocidade em relação ao éter poderia ser detectada. A
primeira vista este hipótese foi comprovada pelo experimento de Michelson-Morley (mas, como vimos, isso
não é verdade). Entretanto, havia também a hipótese de A-J Fresnel (1818) de que o éter penetraria nos
corpos, de sorte que ele seria apenas parcialmente arrastado com os corpos. Nesta hipótese o éter não se
moveria completamente com o corpo (com a mesma velocidade) como na hipótese anterior, mas também não
…caria parado (como um super‡uido). Assim, na hipótese de Fresnel ainda seria possível detectar um certo
movimento entre os corpos e o éter.
Conhecia-se bem o comportamento da luz nos meios, i.e., o fato de que num meio com índice de refração
n a luz se move com velocidade c=n. Pela hipótese de Fresnel, se todo o meio se move com uma certa
velocidade v a luz teria uma velocidade c=n + v0, com v0 < v. Assim, se a densidade do éter no ambiente vale
e , conforme o éter penetra no meio a densidade do éter dentro do meio aumenta para f > e . Além disso,
pela teoria ondulatória da luz, a sua velocidade (e, conseqüentemente, o índice de refração) dependeria da
densidade do éter
1
e
= 2 :
n
f
59
Pela hipótese de Fresnel
v0 = v 1
e
=v 1
f
1
n2
:
Assim, a velocidade u da luz no meio que se move com velocidade v (observada por aguém parado) seria
u=
c
+v 1
n
1
n2
:
(21)
conhecido como arrasto de Fresnel (Fresnel drag). Esta hipótese foi comprovada em 1851, com experimentos
estudando a propagação da luz na água, por H. Fizeau!
Temos então mais um dos problemas do éter. Dois experimentos diferentes (MM e Fizeau) comprovavam dois comportamentos completamente diferentes desta substância. Já vimos como, pela RR, podemos
abandonar a idéia do éter e, assim, entender o experimento de MM. Vejamos agora como a RR explica o
experimento de Fizeau.
Suponha agora que você observa a luz se propagar num meio com índice de refração n e o meio, e.g., um
aquário, se move com velocidade v. Para alguém em repouso no meio a luz se propaga com velocidade c=n,
enquanto para alguém que vê o aquário se mover com velocidade v (para a esquerda) temos, pelo resultado
(17),
c
c
+v
+v
u= n v c = n v :
(22)
1 + c2 n
1 + nc
Expandindo até primeira ordem em
temos
c
n
+v
c
' +v 1
v
n
1 + nc
1
n2
:
Assim, a expressão relativística (22) concorda com a hipótese de Fresnel (21) até primeira ordem
em . A comprovação desta hipótese pelo experimento de Fizeau se deve apenas a di…culdade em se medir
grandezas desta ordem. O resultado (22) foi comprovado P. Zeeman em 1914.
60
2.13.3
Rigidez e elasticidade
Um ponto extremante importante na MC é o conceito de corpo rígido. Este conceito permite simpli…car um
problema envolvendo uma in…nidade de átomos a certas quantidades relacionadas à orientação do corpo no
espaço. Ou seja, para descrever o movimento de um corpo precisamos apenas da localização de qualquer
ponto deste corpo (3 variáveis) e a orientação do corpo segundo um eixo arbitrário (mais 3 variáveis). Assim,
temos 6 variáveis no lugar de 3 1050 . Este conceito tão importante é perdido em RR.
Como já mencionamos antes, a existência de uma barra completamente rígida permitiria enviar um
sinal instantaneamente entre os dois pontos na extremidade desta barra. Em outras palavras, num corpo
perfeitamente rígido o som teria velocidade in…nita (vs >> c). Podemos tomar também o caso de uma
barra que começa a girar com velocidade ângular !. A velocidade tangencial de um ponto qualquer da barra
a uma distãncia r do centro da rotação vale !r. Assim, para qualquer ! existe um r tal que !r > c e
para uma barra su…cientemente longa teríamos pontos se movendo mais rápidos que a luz. Isso implica na
impossibilidade da barra de ter o mesmo ! em todos os pontos, o que implica que a barra se
curva e, mais uma vez, impossibilita a existência de uma barra rígida.
Na verdade, este tópico é extremamente complicado não só em RG, mas também em RR. Uma de…nição
que parece bastante natural seria dizer que um corpo é rígido se seus pontos mantém a mesma distância.
Mas, mesmo esta de…nição óbvia, apresenta problemas em relatividade.
Por exemplo, vamos analisar o paradoxo de Dewan-Beran-Bell. Imagine três espaço naves A, B e C,
pequenas o su…ciente para que a sua dimensão possa ser desprezada. As naves B e C são idênticas e
estão eqüidistantes de A (tudo está sendo medido por A) e combinam para que, quando receber um sinal
luminoso de A, ligam seus foguetes. Assim, quando A emite o sinal ele vê B e C se colocarem em movimento
simultaneamente (pra A) e, conseqüentemente, mantendo a mesma distância. Vamos realizar de novo o
mesmo experimento, só que agora vamos colocar uma linha (bem fraca) ligando os foguetes. Quando as
naves estão paradas a linha tem comprimento L. Então A envia o sinal e as naves B e C começam a se
mover. O ponto é que, quando as naves atingem (simultaneamente visto de A) a velocidade v a linha terá
1
se contraído de uma quantidade
L. Mas, como as naves se movem juntas, a distância entre elas continua
sendo L. Assim, como a linha é menor que a distância entre as naves, ela vai se arrebentar. Porém, se
tivermos um terceira nave D eqüidistante de A,B e C, que também tem um foguete (igual ao de B e C)
e também irá se mover ao receber o sinal de A, ela verá as duas naves (B e C) paradas juntamente com a
linha. Assim, para D tanto as naves como a linha têm uma distância L e a linha não irá se arrebentar.
Problem 33 Mas o que acontece com a linha?
O problema, da forma com que foi descrito acima, foi proposto por J.S. Bell em 1976 para um grupo de
cientistas do CERN. Desde aquela época até hoje as idéias divergem. O ponto é que não se pode tirar
nenhuma conclusão sem fazer uma suposição sobre a elasticidade do …o, se o …o for completamente
rígido ele certamente se quebrará. Neste caso para A é fácil saber porque (pela contração de Lorentz), para
B porque ele começou a se mover antes de C e para D porque houve uma tensão aplicada na corda. Pois,
61
quando a nave B começou a puxar a linha e C começou a empurrar toda esta “tensão” teve de se propagar
pelo …o. Agora, basta o …o ter qualquer elasticidade e se a aceleração for pequena o su…ciente, ele não
quebrará para B e D, mas quebrará para A assim que as naves atingirem uma certa velocidade. Neste caso
a única forma de compatibilizar as realidades físicas é supondo que o …o tem uma elasticidade in…nita.
Outro ponto a se notas é que esta não é uma elasticidade no sentido usual. Pois a contração de Lorentz (como
vimos) é um efeito puramente geométrico e, por isso, não devemos esperar que ela gere forças de tensão nos
corpos. Ou seja, o …o se contrair e as naves continuarem na mesma distância leva a crer que o …o sofre uma
tensão e, consequentemente, uma força. Assim, a noção de elasticidade tratada aqui não é a mesma
da mecânica clássica.
Resumindo, a noção de elasticidade e rigidez é um ponto bastante intrincado na TRR. Por isso, sempre
que possível, devemos evitar fazer uso destas noções para tirarmos qualquer conclusão sobre a realidade física
de um certo sistema físico.
2.14
Vetores
Um conceito crucial no estudo da dinâmica de corpos e campos é o de vetor. Por exemplo, a lei de Newton
F = m•
x
não representa apenas uma equação, mas três. Para se especi…car quantidades mensuráveis, devemos
lembrar que estas três equações dizem respeito a algum sistema de coordenadas. Entretanto, para escrever a
equação (ou as equações) nenhum sistema especí…co precisa ser especi…cado.
Suponha que você deseje escrever as equações de uma mola, mas não conheça o ferramental dos vetores.
Primeiramente você deve especi…car um sistema de coordenadas e, se neste sistema, a mola oscilar no eixo x
62
você escreverá
m•
x =
kx
m•
y =
0
m•
z =
0:
Entretanto, para cada nova escolha dos eixos você escreveria equações diferentes. Ou seja, sempre
que você …zesse referência ao problema da mola, teria de especi…car antes o sistema de coordenadas.
Agora, se você conhece o ferramental dos vetores, basta escrever:
m•
x=
kx :
E nesta equação já está implícito que a força é na direção do deslocamento, independente do sistema de
coordenadas. Ou seja, em várias áreas da física, e especialmente em Mecânica, quando reconhecemos que
uma quantidade é um vetor ganhamos uma série de propriedades que podem ser exploradas na resolução do
problema.
Mas o que signi…ca ser um vetor? Dado um sistema de coordenadas num espaço tridimensional,
podemos representar os vetores por uma tríade ordenada de números. Mas qualquer conjunto de três
números ordenados forma um vetor? A resposta desta segunda pergunta é, obviamente, negativa.
Para dar um exemplo concreto, vamos tratar um problema em duas dimensões. Suponha que v (x; y) é
um conjunto de dois números que indica a velocidade, num ponto x; y, na superfície de um ‡uído segundo
algum sistema de eixo x; y. Esta quantidade pode ser representada como
v=
a
b
!
:
Suponha agora que o seguinte par ordenado w (x; y) indica a pressão e a temperatura do ‡uído, num ponto
x; y, segundo o mesmo sistema de eixos. Esta quantidade pode ser representada como
!
w=
:
Pergunta: Se estabelecermos um novo sistema de coordenadas x0 ; y 0 , que representa um giro do sistema
original no sentido horário de um ângulo , for especi…cado, qual o valor das quantidades acima com relação
a este novo eixo?
Primeiramente devemos lembrar que as quantidades acima dizem respeito a um certo ponto P que,
independente do sistema de coordenadas, representa o mesmo ponto físico do espaço.
Geometricamente é fácil ver que, neste novo sistema de coordenadas, a velocidade do ponto P tem as
63
componentes:
0
0
cos
sin
0
v (x; y) ! v (x ; y ) =
sin
cos
!
a
b
!
=
a cos
b sin
a sin + b cos
!
:
(23)
Lembre que, em geral, x 6= x0 e y 6= y0, mas ambos se referem ao mesmo ponto P .
Já sobre a segunda quantidade, sabemos que a mudança do nosso sistema de coordenadas não vai alterar
as características físicas do ‡uido. Assim a pressão e a temperatura em P serão as mesmas
0
0
!
0
w (x ; y ) =
= w (x; y) :
Ou seja, as duas quantidades possuem leis de transformação diferentes por uma mudança no sistema de
coordenadas. Outras quantidades (outros conjuntos ordenados de dois números) poderiam respeitar outras
leis.
É exatamente a lei de transformação (23) que torna a quantidade v tão conveniente. Podemos reescrever
a expressão (23) como:
!
cos
sin
0
v = R( )v ; R( ) =
sin
cos
Esta é exatamente a mesma lei de transformação das coordenadas do ponto P . Ou seja, se um ponto
P tem coordenadas x; y com relação ao sistema de eixos originais, no sistema girado ele terá as coordenadas
x0
y0
!
=
cos
sin
sin
cos
!
x
y
!
x0 = Rx
Podemos de…nir os vetores no plano como todas as quantidades que, por uma rotação do sistema de
coordenadas, se transforma como a relação acima para as coordenadas13 .
Na expressão acima para w, cada uma das suas componentes se transforma independentemente por uma
rotação do sistema. Ou seja, não ganhamos nada em agrupar estas quantidades. Além disso, podemos
escrever
0
(x0 ; y 0 ) = (x; y) ; 0 (x0 ; y 0 ) = (x; y) :
Quantidades que respeitam a lei de transformação acima (i.e., que não mudam) são chamadas de escalares.
1 3 Veja,
por exemplo, o Capítulo 1 de Classical Dynamics of Particles and Systems, Thornton ST, Marion JB.
64
2.14.1
Tensores
Ocorre as vezes que a primeira vez que um aluno de graduação ouve falar sobre tensores é no curso de
RR. Entretanto, estas quantidades estão presentes em vários problemas de Física Clássica e, especialmente,
engenharia (para um exemplo em Física Clássica veja o livro do Marion, Cap. 11 Dynamics of Rigid Bodies).
Um tensor é uma composição de vetores. A regra de composição é a seguinte: dado dois vetores a e b
(e.g., num espaço de dimensão 3), podemos formar com estes vetores um tensor T de segunda ordem (que na
nossa representação matricial será uma 3 3) cujos elementos são dados por
Tij = ai bj
Ou seja, o elemento i (linha) e
matricial
0
a1
B
a = @ a2
a3
(24)
j (coluna) é o elemento i do primeiro vetor e j do segundo. Na notação
1
0
1
0
b1
a1 b1
C
B
C
B
A ; b = @ b2 A =) T = @ a2 b1
b3
a3 b1
a1 b2
a2 b2
a3 b2
1
a1 b3
C
a2 b3 A :
a3 b3
É crucial notar que Tij = ai bj 6= bi aj , ou seja, na de…nição do tensor a ordem dos elementos é importante.. Na verdade, bi aj é a matriz obtida de T quando trocamos as linhas pelas colunas. Esta operação de
troca é chamada transposição
T
T
(Tij ) = (ai bj ) = bj ai = Tji
Usaremos também a notação
T
(Tij )
TijT = Tji :
Da de…nição acima se trona óbvia a lei de transformação de um tensor de segunda ordem. Um tensor T é
qualquer quantidade que, por uma rotação R do nosso sistema de coordenadas, se transforma como
T ! T 0 = (Ra) (Rb) ;
ou, em componentes
Tij0 = Rim am Rjk bk = Rim Rjk am bk = Rim Rjk Tmk :
Existe uma notação para a regra de composição (24). Se não quisermos fazer alusão aos índices, não é
conveniente escrever ab, pois isso pode confundir com o produto escalar (matricial) de vetores, então nós
escrevemos:
T =a b:
Onde é chamado de produto tensorial (também usa-se , mas isso pode confundir com o produto vetorial).
Todo o desenvolvimento acima pode ser entendido diretamente para o produto tensorial de mais vetores.
65
Assim, o produto tensorial de N vetores a1 ; a2 ; a3 ; :::aN é o tensor de ordem N
T = a1
a2
a3
:::
aN ;
Tilk:::m = ai aj ak :::am :
Lembrando sempre que a ordem dos vetores é importante. Obviamente, para N > 2, não temos mais uma
representação matricial simples, mas isso não representa nenhuma di…culdade, pois sabemos a álgebra dos
elementos.
As de…nições acima podem ser usadas para especi…car o produto tensorial de dois (ou mais) tensores.
Por exemplo, se A é um tensor de ordem N e B um tensor de ordem M , podemos construir o seguinte tensor
T de ordem N + M
T =A
T
ij:::p
|{z}
N +M
B
= Aij:::k B mn:::p
|{z} | {z }
N
M
Concluindo, um tensor de ordem N é qualquer quantidade que, por uma rotação R do sistema de
coordenadas, se transforma como a seguinte composição de N rotações R:
0
Tij:::k
= Rim Rjn :::Rkp Tm Tn :::Tp :
Remark 34 A ordem dos tensores é o número de índices. Assim, na linguagem dos tensores podemos dizer
que vetores (e.g., ai com um único índice) são tensores de ordem 1 e escalares (e.g.,
sem índice) são
tensores de ordem zero.
Remark 35 Uma lei de transformação diferente das acima de…ne certas quantidades como espinores.
2.15
Rotações
As idéias da seção anterior podem ser facilmente estendidas para o espaço tridimensional. Entretanto, agora
para especi…car uma rotação precisamos informar, além do ângulo, o eixo de rotação. Por exemplo, por uma
rotação do sistema de coordenadas de um ângulo na direção do eixo z, no sentido horário, um vetor m
qualquer se transforma como
1 0
m01
cos
B 0 C B
@ m2 A = @ sin
m03
0
0
sin
cos
0
66
10
1
0
m1
CB
C
0 A @ m2 A :
1
m3
Numa notação matricial esta relação pode ser escrita como
m0i =
3
X
(z)
Rij ( ) mj :
j=1
(z)
Onde Rij ( ) são as componentes i (linha) e j (coluna) da matriz
0
cos
B
R(z) ( ) = @ sin
0
sin
cos
0
1
0
C
0 A :
1
Rotações em torno do eixo x e y podem ser escritas como:
0
1
B
R(x) ( ) = @ 0
0
0
cos
sin
0
sin
cos
1
0
cos
C
B
(y)
;
R
(
)
=
A
@ 0
sin
0
1
0
sin
0
cos
1
C
A :
Uma rotação arbitrária R pode ser especi…cava através da rotação em cada uma das direções14
R ( ; ; ) = R(x) ( ) R(y) ( ) R(z) ( ) :
Onde pelo produto acima devemos entender o produto matricial. Ou seja, a notação acima é uma abreviação
para:
3
3 X
X
(x) (y) (z)
Rim Rmn
Rnj :
Rij =
m=1 n=1
Adotemos aqui mais uma simpli…cação na notação. Para não escrevermos sempre o sinal de somatória,
convencionamos que sempre que um índice aparecer repetido existe uma somatória implícita
3
3 X
X
(x)
(z)
(y)
Rim Rmn
Rnj
(x)
(z)
(y)
Rim Rmn
Rnj :
m=1 n=1
Esta é a convenção de Einstein.
Observe que um mesmo índice nunca pode aparecer mais de duas vezes.
Um índice repetido não participa do outro lado da igualdade
(x)
(z)
(x)
(z)
(y)
(y)
Rij = Rim Rmn
Rnj = Rio Rop
Rpj ;
1 4 Para
ver como isso é feito na prática estude os Ângulos de Euler.
67
assim ele pode ser trocado ao bel-prazer. Por isso um índice repetido é chamado de índice mudo (ele não nos
diz nada sobre o resultado.).
Sobre as matrizes de rotação é importante observar (entre outras) duas coisas:
1. Elas não comutam R1 R2 6= R2 R1 ;
2. O produto de duas (ou mais) matrizes de rotação é uma matriz de rotação (conseqüência da propriedade
de grupo).
Posteriormente falaremos mais da importante das características que é formarem um grupo.
Vimos então que um vetor m é uma quantidade que por uma rotação R se transforma como
mi = Rij mj
Como esta operação de…ne o caráter vetorial da nossa quantidade, vemos então a importância de se reconhecer uma matriz de rotação. Ou seja, dada uma matriz R, esta matriz representa alguma rotação?
68
2.16
Métrica
Voltando a pergunta anterior. Antes precisamos saber: o que caracteriza uma rotação?
Uma rotação é uma operação que possui duas propriedades: Uma rotação não altera distâncias nem
ângulos. Mais especi…camente:
1. Uma rotação não altera o tamanho (norma) de um vetor;
2. Uma rotação não altera o ângulo entre vetores.
Vejamos como quanti…car estas propriedades. O produto interno (ou produto escalar ) entre dois vetores
pode ser de…nido como
a:b = ab cos ; a = jaj ; b = jbj ;
onde
é o (menor) ângulo entre os vetores a e b15 .
Ou seja, conhecendo-se o produto interno sabemos o ângulo entre os vetores.
Numa base ortonormal este produto pode ser de…nido como
a:b = ai bi :
Conseqüentemente, se a rotação não altera o ângulo entre vetores ela não altera o produto escalar entre
eles:
a0 = Ra ; b0 = Rb =) a:b = (Ra) (Rb) = a0 :b0 ;
ou em componentes
a0i b0i = ai bi :
Ou seja, a quantidade
(x; y; z)
ai (x; y; z) bi (x; y; z) = a0i (x0 ; y 0 ; z 0 ) bi (x0 ; y 0 ; z 0 ) =
0
(x0 ; y 0 ; z 0 ) ;
(que depende do ponto) não se altera por uma rotação. Então esta quantidade é um escalar.
Além disso, temos:
p
a:a = a2 = ai ai =) a = a:a
Ou seja, o produto interno nos diz como calcular a norma dos vetores.
Vemos então que todas as características que precisamos para caracterizar as matrizes de rotação estão
relacionadas com o produto interno. Para explorar melhor esta relação vamos escrever o produto interno de
1 5 Outras notações para produto interno são: simplesmente ab, nos livros mais antigos (ab), nos livro de álgebra (a; b) e
(motivado pela notação dos livros de álgebra) em física a notação de Dirac haj bi.
69
dois vetores da seguinte forma:
a:b = ai bi = ai Mij bj
1
0
1 0 0
C
B
M = @ 0 1 0 A ; Mij =
0 0 1
(25)
ij
A matriz M , que nos diz como fazer o produto interno de dois vetores é chamada a métrica do espaço. A
métrica possui todas as informações de como medir ângulos e distâncias no nosso espaço, ou
seja, ela nos diz como fazer geometria no espaço.
Remark 36 O fato da nossa métrica assumir a forma simples (25) é uma conseqüência da escolha do nosso
sistema de coordenadas ortonormal euclidiano. Para um sistema não-ortogonal temos o aparecimento de
termos fora da diagonal e, para outros sistemas de coordenadas (e.g., esféricas), esta matriz tem uma forma
bem mais complicada.
Com isso podemos colocar as características das nossas rotações da seguinte forma. Uma matriz R é uma
rotação se ela não altera o produto interno entre os vetores. Ou seja
a:b = (Ra) : (Rb) ;
ou em componentes
ai bi = (Rij aj ) (Rik bk ) :
Usando o tensor métrico (25)
(Rij aj ) (Rik bk )
=
(Rij aj ) Mim (Rmk bk ) = Rij aj Mim Rmk bk
= Rij Mim Rmk aj bk = ai bi = Mij ai bj
o que implica
Rin Mim Rmp an bp = Mnp an bp
Rin Mim Rmp = Mnp
ou seja, rotações não alteram a métrica do espaço. Usando a forma explicita de Mij =
Rin
im Rmp
T
= Rmn Rmp = Rnm
Rmp =
np
ij
temos
:
T
Onde usamos a operação de transposição da matriz Rnm
= Rmn , lembre-se que a multiplicação é de linha
70
por coluna e não pode ser trocada. Se usarmos agora a notação matricial temos:
RT R = I :
(26)
Remark 37 Observe que utilizaremos duas notações diferentes, numa delas explicitamos o índice das matrizes e na outra não. Ou seja, se M e N são matrizes, podemos indicar o seu produto matricial como
A = M N , com A a matriz que resulta do produto, ou Amk = Mmn Nnk , onde Amk é a componente linha m
e coluna k da matriz A. A utilização de uma ou outra notação depende apenas da conveniência.
Remark 38 Observe que Mmn Nnk = Nnk Mmn , pois cada elemento de uma matriz é apenas um número.
Entretanto, M N 6= N M pois o produto de matrizes não comuta. Então, ao utilizar a notação simpli…cada
(sem os índices) é crucial não trocar a ordem dos elementos.
Temos então a caracterização das nossas matrizes de rotação:
Uma matriz de rotação é aquela que, quando multiplicada pela sua transposta, nos dá a identidade.
Ou, de forma equivalente, é uma matriz cuja inversa é igual a sua transposta. Matrizes com a propriedade
(26) são chamadas de matrizes ortogonais (rotações são matrizes ortogonais). Numa linguagem mais técnica,
o conjunto de todas estas matrizes formam o chamado grupo ortogonal em 3 dimensões, ou grupo O (3).
Na verdade, o grupo ortogonal não contém apenas rotações, mas também a inversão dos eixos. Por
exemplo, a matriz que troca o sinal (sentido) do eixo x é dada por
0
1
B
@ 0
0
1
0 0
C
1 0 A :
0 1
Esta matriz é ortogonal, mas não representa nenhuma rotação (uma rotação no eixo z trocaria também o
sinal de y). Mesmo assim esta matriz preserva ângulo e distâncias. Uma característica geral das matrizes de
inversão de eixo é que elas possuem determinante igual a 1. Assim, as matrizes de rotação são as matrizes
ortogonais de determinante igual a 1. Este é o grupo das rotações em três dimensões, também chamado grupo
ortogonal especial em 3 dimensões, ou SO (3).
71
2.17
O espaço de Minkowski
Utilizando diretamente as TL é direto obter a relação:
x21 + y22 + z32
2
02
02
(ct) = x02
1 + y 2 + z3
2
(ct0 ) :
Exercise 39 Obtenha a relação acima.
Mais ainda, se (x1 ; y1 ; z1 ; t1 ) e (x2 ; y2 ; z2 ; t2 ) são dois eventos quaisquer em num sistema S é fácil ver que,
pelas TL, num sistema S 0 temos
2
2
2
2
( x)
(ct) = ( x0 )
(ct0 ) :
(27)
Na mecânica newtoniana, onde os tempos são iguais t = t0 , a igualdade acima se reduz na invariância
do tamanho de vetores
2
2
( x) = ( x0 )
Que é exatamente a propriedade que de…ne o comportamento dos vetores sob rotações.
Para o que segue é bastante conveniente não trabalhar com a notação x; y; z, mas sim com a seguinte
notação:
x1 x ; x2 y ; x3 z :
Lembre-se agora que, quando partimos do plano para o espaço 3D tudo que tivemos de fazer para expressar
a invariância do tamanho dos vetores por uma rotação foi introduzir mais um termo:
02
x21 + x22 = x02
1 + x2 2D ,
02
x2 + x22 + x23 = x02 + x02
2 + x3 3D .
(28)
O matemático H. Minkowski16 observou que, se introduzimos uma coordenada imaginária no lugar da
coordenada temporal
x4 ict
podemos escrever a relação (27) como:
02
02
02
x21 + x22 + x23 + x24 = x02
1 + x2 + x3 + x4 :
O que poderia ser identi…cado como uma versão quadridimensional da relação (28). Ou seja, nesta interpretação as TL preservam a norma dos vetores no espaço 4D, da mesma forma que rotações preservavam
a norma no espaço 3D. Este espaço 4D é também chamado de espaço-tempo. Assim, adaptando os termos
introduzidos anteriormente, um evento é um ponto no espaço-tempo. Explorando esta interpretação,
1 6 Minkowski
foi professor de Einstein em Zürich.
72
e lembrando que rotações preservam as distâncias, poderíamos tentar escrever:
x01
x04
!
=
x01
= x1 cos
x04
= x1 sin + x4 cos
cos
sin
!
sin
cos
x1
x4
!
x4 sin
(29)
onde usamos que as TL só misturam as coordenadas x1 e x4 , enquanto x2 = x02 e x3 = x03 . Lembrando agora
que x1 é real e x4 imaginária, e que o mesmo deve ser válido para x01 e x04 , devemos ter
Im (cos ) = Re (sin ) = 0
Esta propriedade pode ser satisfeita se introduzirmos (da mesma forma que a coordenada imaginária) um
ângulo imaginário:
i ; 2R
Pois, com isso
cos
=
cos i = cosh
sin
=
sin i = i sinh
2R
; sinh
2R
Substituindo em (1.14) temos:
x01
= x1 cosh
ix4 sinh
x04
= ix1 sinh
+ x4 cosh
x01
= x1 cosh + ct sinh
1
x1 sinh + t cosh
=
c
Usando agora a de…nição de x4 = ict
t0
Comparando agora com as TL
x01 =
(x1
vt) ; t0 =
temos
cosh
=
= cos ; sinh
=
t
v
=
c
xv
c2
=
Remark 40 Observe que, como os ângulos são imaginários, cos > 1.
73
i sin
Figure 10: Figura retirada do livro do Pauli
Com isso, formalmente as TL podem ser interpretadas geometricamente como uma rotação do sistema de
coordenadas por um ângulo imaginário.
A …gura acima mostra a representação geométrica de uma TL como uma rotação.
Remark 41 Observe que a …gura foi girada por um ângulo
horário).
em relação a nossa descrição acima (sentido
Neste tipo de …gura representamos o tempo no eixo vertical e o espaço no eixo horizontal. Assim, eventos
que ocorrem no mesmo ponto do espaço são linhas verticais. Enquanto eventos simultâneos são linhas
horizontais.
Da …gura é possível ver diretamente que dois eventos simultâneos em S 0 não serão simultâneos em S. Por
exemplo, a projeção em t das extremidades de L0 .
Remark 42 Observe que o tamanho da barra medido em S não é a projeção ortogonal (com respeito à x1 )
das extremidades da barra, mas sim dois pontos quaisquer onde os eventos “a extremidade L1 e L2 da barra
passaram nesta posição no mesmo instante de tempo”. Isso porque, como vimos, medidas de distância deve
envolver eventos simultâneos para quem efetua a medida. Por isso a medida da barra em S é a distância
entre dois pontos quaisquer onde as retas L1 e L2 (que indicam a evolução das extremidades da barra em S 0 ,
onde ela está parada) cruzam uma reta perpendicular a ct.
74
Diretamente da …gura temos
cos =
L0
1
L0
=) L =
=) L = L0
L
cos
Observe que como cos = > 1 o comprimento L < L0 , resultando assim na contração de Lorentz. Observe,
porém, que esta contração pode ser veri…cada geometricamente, pois uma barra que estivesse em repouso
no sistema S representaria a projeção de L0 e x1 (linha pontilhada na …gura). Ou seja, esta seria uma
barra parada em S que, visto por um observador em S, provocaria os mesmos efeitos (a mesma seqüência de
eventos) em S 0 .
Da mesma …gura vemos que o tempo t0 = de S0 visto de S tem o comprimento:
cos =
t
=) t =
:
Neste caso a dilatação temporal pode ser veri…cada diretamente na …gura através da projeção de
ct.
no eixo
Remark 43 O exemplo acima mostra, mais uma vez, o ponto das transformações temporais serem diretas
(projeções diretas do comprimento dt0 em t) enquanto as medidas de distâncias envolverem projeções indiretas
(não é a projeção do comprimento dx0 em x).
Assim, a linguagem e notação presentes nesta seção são usadas em todos os livros mais antigos de RR.
Uma liguagem mais moderna, presente inclusive na reedição de alguns livros mais antigos (e.g., Teoria de
Campo do Landau) é a que usaremos nas seções seguintes. Além disso, esta linguagem mais moderna (sem
coordenadas imaginárias) permite uma generalização direta para a TRG.
2.17.1
Notação
No que segue é bastante conveniente utilizar a seguinte notação:
x = x1 ; y = x2 ; z = x3 ; x0 = ct ;
(note que todos os eixos tem agora a mesma unidade17 ) onde os expoentes são índices e não potências.
Note que nesta notação introduzimos uma coordenada x0 que, diferente de x4 , também é real.
1 7 Neste novo sistema de unidades tempo é uma medida de distância. Ou seja, 1 segundo é a distância percorrida pela luz em
1 segundo, i.e., 3 108 m.
75
Utilizando esta notação e a linguagem matricial da seção anterior, podemos escrever as TL (7) na forma:
0
B
B
B
B
@
ou ainda
x00
x01
x02
x03
1
C B
C B
C=B
C B
A @
=p
1
1
x0 = x ;
ou, explicitando as componentes,
10
x0
0 0
CB 1
B
0 0 C
CB x
C
2
1 0 AB
@ x
x3
0 1
0
2
0
0
;
=
0
0
v
:
c
0
B
B
=B
B
@
0
0
x0 =
0
0
1
C
C
C ;
C
A
1
0 0
C
0 0 C
C ;
1 0 C
A
0 1
x :
Introduzimos aqui outra notação bastante conveniente, ao invés de identi…carmos a linha e a coluna como,
respectivamente, o primeiro e segundo índice estamos identi…cando: Na matriz
O primeiro índice ( ) indica as linhas e o segundo índice ( ) indica a coluna.
Além disso, por razões que (com sorte) …carão mais claras no futuro,modi…camos também um pouco a
nossa convenção da soma de índices repetidos:
Existe uma somatória em dois índices repetidos apenas quando um deles aparece em cima e outro
aparece embaixo.
Com isso temos:
1. O mesmo índice jamais aparecerá mais de duas vezes. E quando aparecer duas vezes ele será um
índice mudo.
2. Dois índices repetidos nunca (ou pelo menos quase nunca) aparecem ambos em cima ou em baixo.
Se no …nal das suas contas alguma destas regras foram quebradas você cometeu algum erro.
Remark 44 Na verdade, esta notação com índices em cima e em baixo não é necessária na Teoria da Relatividade Restrita18 , apesar de ser indispensável na Teoria da Relatividade Geral. Mesmo assim ela possui
aqui três vantagens: 1) A maioria dos livros a utiliza, de sorte que será mais fácil comparar nossas expressões
com as contidas nestes livros; 2) Ele ajuda bastante na detecção de erros nas manipulações algébricas; 3)
Permite se acostumar com uma notação indispensável no estudo da TRG.
1 8 Veja,
por exemplo, o comentário no livro J. J. Sakurai - Modern quantum mechanics.
76
Remark 45 Observe que estamos de…nindo os pontos no espaço-tempo com índices em cima, ou seja,
x = (ct; x) = (ct; xi ) :
Isso é importante para identi…carmos as quantidades da MC com as da RR.
Na notação acima você deve ter reparado que os índices estão sendo marcados com letras gregas,
enquanto na seção anterior utilizamos letras latinas. Temos aqui também a seguinte convenção:
Índices latinos indicam quantidades com 3 componentes e, no caso da somatória, variam de 1 a 3 (e.g.,
i = 1; 2; 3). Índices gregos indicam quantidades com 4 componentes e, nas somatórias, variam de 0 a
3 (e.g., = 0; 1; 2; 3).
77
2.17.2
Grupo de Lorentz
Recapitulando:
1. Por uma rotação R as coordenadas se transformam como: x0i = Rij xj (onde adaptamos a notação para
índices em cima);
2. Rotações mantêm invariantes o produto interno x:x =
P
2
xi ;
3. O produto interno pode ser expresso através da métrica M : x:x =xi Mij xj ;
4. Como conseqüência de (2) rotações mantém a métrica invariante: Mij = Rik Mkm Rmj ;
5. Como conseqüência de (4) rotações são matrizes ortogonais: RT R = I;
6. Vetore é qualquer quantidade que, por uma rotação, se transforma como as coordenadas: m0i = Rij mj ;
7. O produto interno de qualquer vetor é invariante por rotações: m0i m0i = mi mi ;
Nosso objetivo agora é estender estes resultados para o espaço 4D de Minkowski.
Por uma transformação de Lorentz, as coordenadas do nosso espaço-tempo 4D se transformam como:
x0 =
x :
Além disso, as transformações de Lorentz mantêm invariante o produto:
3
X
x0i
2
x00
2
=
i=1
X
xi
2
x0
2
:
Seguindo o mesmo o esquema desenvolvido para o espaço euclidiano, vamos escrever este produto interno
com:
X
2
2
xi
x0 = x
xv
Onde introduzimos a quantidade
00
=
1;
ii
=1;
=0
6=
:
Observe que, para manter a nossa convenção tivemos de de…nir a métrica com ambos os índices em baixo.
Esta é uma característica peculiar da métrica que se tornará mais clara com o desenvolvimento.
78
Assim, se especialmente para a métrica, continuarmos usando a nossa de…nição antiga do primeiro índice
representando linha e o segundo coluna, podemos escrever n como a matriz:
0
B
B
=B
B
@
1
0
0
0
1
0 0 0
C
1 0 0 C
C :
0 1 0 C
A
0 0 1
Esta matriz é o tensor métrico do nosso espaço 4D. Usando agora que uma TL não altera o produto interno
entre as coordenadas, podemos escrever:
x
xv = x0
x0v =) x
xv = x
x :
(30)
Novamente, como no caso 3D, sendo a relação acima válida para qualquer ponto, podemos escrever
=
;
ou seja, TL mantém invariante a métrica .
Se usarmos agora a notação matricial devemos notar que, assim como no caso das rotações, o primeiro
produto acima multiplica coluna por coluna. Assim, a notação correta para o produto acima seria
=
T
:
(31)
Assim como no caso das rotações, usamos agora a relação acima para de…nir as transformações de Lorentz:
Uma transformação de Lorentz é qualquer transformação que obedece a relação (31).
Assim como no caso das rotações, as matrizes que respeitam a relação (31) formam um grupo. Em
especial, o produto de duas matrizes 1 e 2 que respeitam (31) também respeita (31). Este grupo, em
analogia com o grupo das rotações O (3), é chamado de grupo de Lorentz O (3; 1). Onde o 1 indica que uma
das componentes da nossa métrica é negativa.
Exercise 46 Mostre que, se
1;
2
2 O (3; 1) =)
=
1
2
2 O (3; 1).
Mais uma vez este grupo é muito maior do que o grupo das TL que estávamos estudando. Em especial,
observe que para uma rotação pura (no sentido usual) do sistema de coordenadas, i.e., v = 0 ( = 1 ; = 0)
nas TL, temos
!
1 0
R=
0 R3
79
onde R3 é uma rotação qualquer dos eixos espaciais. Com isso
R
T
R
=
1 0
0 R3T
!
!
=
1 0
0 R3T
=
1
0
T
0 R3 R 3
1 0
0 I
!
!
1 0
0 R3
=
!
1 0
0 R3
1 0
0 I
!
!
=
Ou seja, rotações puras do sistema de coordenadas pertencem ao O (3; 1).
Transformações que invertem os eixos também fazem parte do GL. Mas agora temos também a possibilidade de inverter a coordenada temporal mudando o sinal de 0 0 . Uma TL que não muda o sinal do tempo
( 0 0 > 0) é chamada de ortocrônica e uma que não muda a orientação dos eixos espaciais (det i j > 0) é
chamada de própria.
As transformações próprias formam o grupo especial SO(3; 1) e as próprias ortocrônicas o grupo SO+ (3; 1)19 .
Neste curso trabalharemos apenas com transformações do grupo SO+ (3; 1).
Dentro do GL é costume chamar de rotações as rotações apenas dos eixos espaciais, neste caso v = 0
em . Além disso, uma TL pura, i.e., a TL que usamos até agora para de…nir a relação das coordenadas
entre referenciais em movimento é chamada de boost.
Podemos agora utilizar uma de…nição análoga ao caso euclidiano para de…nir vetores no espaço 4D de
Minkowiski. Estas quantidades, para diferenciar da de…nição no espaço euclidiano (futuramente veremos por
que esta diferenciação é necessária), são chamados de quadrivetores (4-vetores).
Um quadrivetor é qualquer quantidade que, por uma transformação do grupo de Lorentz, se transforma
como as componentes das coordenadas. Ou seja, se m é um 4-vetor e aplicamos uma TL então
m =
m :
Da mesma forma que na mecânica usual, a utilização de vetores torna a descrição dos sistemas bem
mais simples. Então, na RR devemos procurar por quantidades que se comportem como 4-vetores. Como
veremos, esta não é uma tarefa tão simples, pois a mistura das coordenadas espaciais e temporais torna a
nossa intuição quase sempre insu…ciente para esta procura.
Uma conseqüência direta dos resultados acima é que, como no caso 3D, o produto escalar de dois
4-vetores quaisquer
a
b = (x) :
19 O
nome SO(3; 1) também é usado como SO+ (3; 1).
80
é um escalar. Ou seja, esta quantidade
referenciais inerciais.
(x) (que depende do ponto) possui o mesmo valor para todos os
Remark 47 Pelos efeitos antes discutidos (contração do espaço e dilatação do tempo) vemos que quantidades
como distâncias (que antes eram vetores) não são 4-vetores.
2.17.3
Transformações de Lorentz numa direção arbitrária
Antes desta seção trabalhamos apenas com TL onde os referenciais se moviam exclusivamente na direção
x. Usando as propriedades de grupo das matrizes podemos facilmente obter uma expressão para uma TL
numa direção arbitrária. Suponha que, dado um sistema de coordenadas S desejamos descrever eventos um
referencial S 0 que se move com velocidade v = v1 x
^1 + v2 x
^2 + v3 x
^3 com relação a S. Esta descrição é dada
através da TL (v)
x0 = x ; 2 SO (3; 1) :
Remark 48 Apensar da velocidade ter uma direção arbitrária, ainda estamos considerando (como sempre
…zemos) que os eixos de ambos os referenciais são paralelos e que as origens coincidem.
A possibilidade de fazer rotações no nosso sistema de coordenadas, permite que possamos trabalhar num
(novo) sistema S~ que represente uma rotação do sistema S e que leva o eixo x na direção de v, ou seja, neste
sistema S~ temos
0
1
v~1
B
C
v
~ = r^v = @ 0 A ; r^ 2 SO (3) :
(32)
0
Com relação a este sistema de coordenadas S~ as TL tem a forma usual
~
=
=
observe que
0
B
B
B
B
@
p
1
0
0
1
2
1
0 0
C
0 0 C
C
0
1 0 C
A
0
0 1
v
; =
c
j~
vj = jvj = v
pois r^ 2 O (3) é uma rotação.
81
(33)
Neste novo sistema de coordenadas temos20
x
~0 = ~ x
~ = ~ Rx
onde
R=
1
0
0
r^
!
2 SO (3; 1) ;
mas
x
~0 = Rx0 ;
com isso
Rx0 = ~ Rx =) x0 = R
1~
Rx ;
onde R 1 é a inversa de R (o fato da inversa de R existir é também uma propriedade do grupo).
Assim, encontrando a rotação R (ou r^) podemos usar a TL ~ (33) (que é aquela que utilizamos em toda
as seções anteriores) para encontrar a transformação numa direção qualquer
=R
Como R 2 S0 (3; 1) e ~ 2 SO (3; 1) então
1~
R:
(34)
2 SO (3; 1) é uma TL.
2 0 Lembre que, como S 0 estava inicialmente orientado com S a aplicação da mesma rotação em S 0 fará com que S
~0 esteja
~
orientado com S.
82
O fato do 4-espaço, e não do espaço ordinário, ser isotrópico nos obriga a substituir as rotações usuais
pelas TL.
Vetores
Grupo de Lorentz
Grupo de Lorentz especial ortocrono
Rotações
TL
TL numa direção qualquer.
Por exemplo, suponha que o sistema S 0 se move com velocidade v, em relação ao sistema S, na direção
(positiva) do eixo y (ou x2 na notação vetorial cartesiana, ou x2 na notação de 4-vetores). Como seria a
matriz (v^
y) da TL correspondentes?
Primeiramente, vamos responder esta pergunta usando diretamente a de…nição das TL. Obviamente, não
existe nada especial com o eixo x no tratamento de problemas reais. Assim, se desde o princípio tivéssemos
escolhido a transformação no eixo y teríamos escrito:
x01 = x1 ;
x02 =
x03
(x2
vt) ;
= x3 ;
t0 =
t
v
x2
c2
;
ou, usando a notação de 4-vetores21 ,
x00
=
x01
= x1
x02
=
x03
= x3
x0
x2
x2
x0
2 1 Até aqui estamos marcando todos os vetores do espaço 3D com índices em baixo e 4-vetores com índices em cima. Infelizmente
esta facilidade não durará pra sempre.
83
o que na notação matricial representa
0
B
B
B
B
@
x00
x01
x02
x03
1
0
C B
C B
C=B
C B
A @
0
1
0
0
0
0
0
0
0
1
0
0
10
CB
CB
CB
CB
A@
1
x0
x1
x2
x3
C
C
C ;
C
A
onde temos explicitamente a matriz (v^
y) procurada.
Vamos agora usar o formalismo baseado no grupo de Lorentz desenvolvido anteriormente (34). Se nosso
observador no sistema S 0 deseja usar a TL ~
(v^
x) (33) (de…nida na direção x) tudo que ele precisa fazer
é:
girar o seu sistema de coordenadas na direção do eixo z no sentido anti-horário, de um ângulo de 45o .
Ou seja, ele precisa aplicar no seu sistema de coordenadas a rotação
R ^=
0
B
B
^
z =B
B
2
@
1
0
0
0
0
cos 2
sin 2
0
0
sin 2
cos 2
0
0
0
0
1
1
0
C B
C B
C=B
C B
A @
1
0
0
0
0
0
1
0
1
0 0
C
1 0 C
C :
0 0 C
A
0 1
Agora, com relação ao seu novo sistema de coordenadas x
~0 = Rx0 a velocidade v está na direção x
~1 (ou x
~1 )
e ele pode usar a TL (33) que de…nimos anteriormente
0
B
B
(v^
x) = ~ = B
B
@
0
0
0
0
1
0 0
C
0 0 C
C :
1 0 C
A
0 1
Usando agora (34) temos:
(v^
y) = R
1
^=
Tudo que precisamos fazer é calcular a inversa de R
R
1
^=
2
(v^
x) R ^ =
^
z
1
2
^
z
, mas como R 2 O (3)
0
B
B
^
z =R =B
B
2
@
T
84
1 0
0 0
0 1
0 0
0
1
0
0
0
0
0
1
1
C
C
C ;
C
A
e efetuar o produto matricial
(v^
y)
0
B
B
= B
B
@
0
B
B
= B
B
@
1
0
0
0
0
0
1
0
0
1
0
0
0
0
0
0
0
0
0
1
10
1
0 0
CB
CB
CB
B
0 0 C
CB 0
CB
C
CB 0
0
1 0 AB
@ 0
A@
0
0
0
0 1
1 0
10
1 0 0 0
0 0
C B
CB
C B
B
1 0 C
CB 0 0 1 0 C = B
B
B
C
1 0 0 C
0 0 A@ 0
A @
0 0 0 1
0 1
10
Assim, a matriz
0
B
B
(x^
y) = B
B
@
0
1
0
0
0
0
0
0
0
0
0
1
0
0
1
0
0
0
1
0 0
C
1 0 C
C
0 0 C
A
0 1
0
1
0
0
0
0
0
0
0
1
1
C
C
C :
C
A
1
C
C
C
C
A
que concorda com a obtida anteriormente, representa uma TL pura (um boost, sem nenhuma rotação) na
direção do eixo y. Da mesma forma, podemos agora obter as TL em qualquer direção.
Remark 49 Neste exemplo a utilização direta da TL é, obviamente, muito mais simples (o mesmo ocorre
quando v está na direção de qualquer um dos eixos). Entretanto, para uma transformação numa direção
arbitrária, o uso do formalismo acima se mostra muito mais conveniente.
Exercise 50 Obtenha a transformação correspondente a composição das transformações: uma TL com velocidade vx na direção x
^, seguida de uma outra TL com velocidade vy na direção y
^. A TL resultante é a
mesma de uma TL com velocidade vy na direção y
^ seguida de uma com velocidade vx na direção x
^?
2.18
Minudências matemáticas
Alguns pontos formais sobre o desenvolvimento acima se fazem necessários.
2.18.1
Grupo
Neste ponto você já deve estar convencido de que o fato de uma matriz pertencer a um grupo é importante.
Como vimos, o fato de um conjunto de matrizes pertencer a um grupo nos permite usar várias de suas
1
propriedades. Por exemplo, se sabemos que se 2 O (3; 1) podemos a…rmar que
existe.
Por de…nição, um grupo é qualquer conjunto G onde de…nimos uma operação (chamada lei de composição
do grupo) que permite combinar quaisquer dois elementos de G para formar um terceiro elemento, a 2 G; b 2
G =) a b 2 G. Para que este conjunto forme o grupo (G; ), juntamente com esta operação, ele precisa
satisfazer quatro axiomas:
85
1. Ser fechado:
para quaisquer elementos a; b 2 G, a composição a b 2 G
2. A operação deve ser associativa:
para todo a; b; c 2 G =) (a b) c = a (b c).
3. Existe o elemento identidade:
existe um elemento e 2 G, tal que, para qualquer a 2 G; a e = e a = a.
4. Existência do inverso:
Para todo a 2 G existe um elemento b 2 G, tal que a b = b a = e (identidade).
A…rmar que SO (3; 1) forma um grupo implica em dizer que seus elementos respeitam todas as propriedades acima. Em especial, o produto de duas TL é também uma TL e toda TL possui uma inversa.
Exercise 51 Mostre que as matrizes ortogonais, i.e., matriz que respeitam
RT R = I ;
formam um grupo.
2.18.2
Pseudo-métrica
Em todas as discussões acima explicitamos as semelhanças entre o espaço de Minkowski e o espaço euclidiano.
Entretanto, uma diferença crucial precisa ser salientada. Para qualquer vetor a a métrica M do espaço
euclidiano obedece:
ai Mij aj = a:a = jaj > 0 ; a 6= 0 :
Esta propriedade faz parte da de…nição de um produto interno. Entretanto, quando falamos do
espaço de Minkowski com a métrica podemos ter
mv < 0 ;
m
para alguns 4-vetores. Basta que22
3
X
mi
2
< m0
2
:
i=1
O fato de um 4-vetor poder ter uma norma negativa faz com que a métrica que de…nimos não se comporte
como uma métrica (no sentido usual). Por isso é chamado de uma pseudo-métrica.
Todas as características especiais do espaço de Minkowski estão no fato de uma das coordenadas entrar
no “produto interno” com um valor negativo. Por isso, toda quantidade que disser respeito a este tipo de
2 2 Futuramente
discutiremos as implicações físicas deste fato.
86
espaço explicitam este fato, e.g, o nome do grupo SO(3; 1). Dizemos também que o espaço possui 3 + 1
dimensões. Se estivéssemos trabalhando com TL no plano teríamos o grupo SO(2; 1). Dizemos que estamos
trabalhando em 2 + 1 dimensões.
Observe também que todo o desenvolvimento acima pode ser feito usando:
"
3
X
0i 2
00 2
x
x
i=1
3
X
x00
2
x0i
#
hX
=
2
2
x0
=
i=1
Ou seja, usando a métrica:
0
B
B
=B
B
@
1
0
0
0
0
1
0
0
0
0
1
0
0
0
0
1
A escolha do “sinal” da métrica é uma questão de convenção.
Exercise 52 Mostre que, se
x0
então,
2
X
v:x
c2
xi
xi
2
X
x0
xi
2
i
2
1
C
C
C :
C
A
2
(35)
jtj
O que implica que, para qualquer TL, se t > 0 ! t0 > 0; t < 0 ! t0 < 0. Ou seja, a seqüência de dois
eventos que respeitem (35) é a mesma para qualquer referencial inercial.
2.19
Mecânica relativística
Resta-nos ainda saber como a mecânica de Newton deve ser modi…cada. Ou seja, sabemos que devemos
de…nir os referenciais inerciais pelas TL, e vimos uma série de conseqüências desta substituição, mas como
isso afeta a dinâmica dos corpos?
Vejamos o que ocorre na lei clássica da conservação de momento.
As leis devem ser formuladas com forças de contato.
Imagine a colisão de dois corpos de massa ma e mb . A lei de conservação dos momento nos diz:
ma ua + mb ub = mc uc + md ud
(36)
onde (a; b) e (c; d) são os indices das quantidades antes e depois da colisão.
Se observarmos esta mesma colisão por um referencial que se move com velocidade v as transformações
87
de Galileu (ou a soma de velocidades de Galileu) diz que as velocidades serão:
u0 = u
v
com isso
ma (u0a + v) + mb (u0b + v)
= mc (u0c + v) + md (u0d + v)
ma u0a + mb u0b + (ma + mb ) v
= mc u0c + md u0d + (mc + md ) v
Então, se admitirmos que a massa se conserva
ma + mb = mc + md ;
(37)
o momento também será conservado no novo sistema de coordenadas:
ma u0a + mb u0b = mc u0c + md u0d :
Entretanto, quando a transformação de velocidade de Galileu é substituída pela respectiva formula de Einstein:
u0 + v
u=
1 + u0 v=c2
temos
ma
u0a + v
1 + u0a v=c2
+ mb
u0b + v
1 + u0b v=c2
u0c + v
1 + u0c v=c2
= mc
+ md
u0d + v
1 + u0d v=c2
:
E, obviamente, a conservação do momento na forma (36) não será mais satisfeita.
Ou seja, se de…nirmos o momento como mv um e postularmos que a massa se conserva, não temos mais
a lei de conservação do momento.
A conservação do momento clássico está relacionada com a simetria de homogeneidade do espaço
(simetria translacional e rotacional), que por sua vez se relaciona com as propriedades de transformação
dos vetores no espaço euclidiano. Ou seja, a conservação do momento clássico é uma conseqüência de
(por TG) a massa ser um escalar e a velocidade ser um vetor.
Entretanto, no espaço 4D, a velocidade não se transformam como as coordenadas
u0x
=
ux
dx0
=
dt0
1
vux
c2
u0y
=
dy 0
1
=
dt0
1
u0z
=
1
dz 0
=
dt0
1
v
6=
uy
vux
c2
uz
88
vux
c2
(ux
vt) ;
6= uy ;
6= uz ;
ou seja, as componentes espaciais da velocidade não se transformam como as coordenadas e, certamente, não
são parte de um 4D.
Note, porém que, obviamente, os numeradores das quantidades acima se comportam como as componentes
espaciais de um 4D,
dx0i = i dx
(38)
o que nos mostra que o problema está no denominador, ou melhor, na de…nição da nossa medida tempo.
Exercise 53 Veri…que (38).
Assim, o fato da velocidade ser um vetor era muito importante na mecânica newtoniana, mas agora
esta quantidade não se comporta como um 4-vetor. Precisamos então encontrar o 4-vetor correspondente a
velocidade.
89
2.19.1
Tempo próprio
Voltando para o problema do paradoxo dos gêmeos, vimos que a TRR poder ser usada (eliminado assim
o paradoxo) desde que o tempo aceito como verdadeiro seja aquele do referencial inercial. Usualmente, ao
estudarmos a dinâmica de um corpo, este sofre acelerações. Assim, mais uma vez é importante usarmos, não
o tempo visto diretamente do corpo, mas como este tempo é visto por um referencial inercial.
Suponha que S0 é um referencial qualquer (não necessariamente inercial) e S é um referencial inercial.
Relembrando o problema do paradoxo, Alice na nave em S0 sabia que havia se passado t0 = 7 anos no
relógio dela. Mas ela não podia usar este tempo porque (ela sabe que) seu referencial não era inercial.
Então ela se perguntou: se Bob em S olhar pro meu relógio enquanto ele marca t0 = 7, quanto marcará o
relógio dele? A resposta (visão de Bob olhando um evento na nave):
t0 = (3; 57)
t=
(7) = 25 anos
(39)
então ela passou a usar o tempo de Bob para saber qual o tempo no referencial inercial da terra. Mesmo que
a nave de Alice mudasse de velocidade constantemente (i.e., sofresse várias acelerações), ela poderia calcular
o tempo marcado por Bob usando:
t=
Z
dt0 =
Z
t0
q
0
1
1
[u(t)]2
c2
dt0
onde t0 é o tempo que ela registrou da viagem. Qual dos tempos t de Bob ou t0 de Alice é o melhor? A
resposta depende apenas do tipo de problema que se deseja resolver. Apesar de A estar num referencial não
inercial, haverá situações em que o tempo dela é o que "conta".
Obviamente o tempo t0 de Alice também é importante para ela, pois qualquer coisa que aconteça dentro
da nave acontecerá com esta taxa de tempo. Assim, se Alice tiver levado um livro de receita da terra e,
nos entremeios das tarefas especializadas de astronauta, ela quiser assar um bolo, ela usará o seu tempo t0 .
Entretanto, se ela quiser marcar um encontro com alguém na sua volta, ela deverá usar o tempo t calculado
acima.
Mesmo para B o tempo de A pode ser o mais importante. Suponha que, diferente do exemplo anterior,
a nave permanece acelerada durante toda a viagem (o que é mais razoável que uma inversão instantânea na
velocidade), mas de forma que, durante toda a viagem
dt0 =
1
dt =)
t0 =
Z
0
t
s
1
2
[u (t)]
dt = 14 anos .
c2
(este é o inverso do cálculo anterior) onde t = 50 anos é o tempo da viagem para B e t0 = 14 anos, o tempo
para A. Imagine que antes da viajem B tenha de abastecer a nave de A. Pelos cálculos precisos (usando a
mecânica relativística) B sabe que durante toda a viagem o motor da nave consumirá 1 T de combustível por
90
ano. Entretanto, B sabe que este consumo se refere a um motor parado na bancada de teste. Quando este
motor for colocado na nave ele também estará em movimento e, independente da tecnologia envolvida, todo
o seu mecanismo funcionará mais devagar. Enquanto para A, para quem o motor permanecerá parado, a
taxa de consumo será a mesma medida na terra. Assim, B sabe que o motor consumirá 1 T/ano não durante
os t = 50 anos da viagem (que é o tempo que ele registrará), mas durante o tempo:
t0 =
1
t=
1
50 = 14 anos:
3; 57
Ou seja, ele terá de abastecer a nave com 14 T de combustível (e não com 50 T). Assim, qual tempo é o mais
importante depende apenas da resposta que procuramos.
Concluindo, o tempo t0 é importante para eventos que ocorrem exclusivamente dentro da nave. Entretanto, a dinâmica de vários corpos, por exemplo, num problema de choque entre dois corpos (neste caso duas
naves) envolve o tempo de eventos fora do seu referencial. Neste caso, alguém num referencial inercial (onde
as leis da Física são válidas) faz um cálculo e chega à conclusão que o choque das naves acontecerá em t = T .
. E este é o tempo que todos os demais referenciais vão ter de usar.
Ainda nos exemplo das naves, suponha que temos agora 2 nave: a de Alice (A) e a de Charles (C). As
naves viajaram para lugares diferentes com velocidades diferentes, mas Bob realizou todos os cálculos para
que em ambos os casos a viagem dure t = T anos. Ou seja, o evento “o encontro das naves na terra”
ocorrerá após t = T anos. Imagine que A e B querem saber o quanto de comida eles devem levar, ou ainda,
eles podem querer colocar seus próprios relógios para despertar na ocasião do encontro. Eles sabem que,
visto da terra, o relógio deles anda mais devagar e quando o relógio da terra marcar um tempo T o relógio
em cada nave (chamemos de Ta o tempo de Alice e Tc o tempo de Charles na outra nave) marcará (observe
que o problema agora é o contrário de (39))
Ta;c =
Z
T
s
2
[ua;c (t)]
dt :
c2
1
0
onde a velocidade ua;c é a velocidade de A; C com relação a terra.
De forma geral, se todos os objetos envolvidos concordarem em usar o tempo de um referencial
inercial S, quando se passar um intervalo de tempo dt neste referencial, para qualquer objeto que se mova
com velocidade u (em relação a S) terá se passado um intervalo de tempo:
d =
1
dt =
r
1
u2
dt :
c2
Este intervalo é chamado de tempo próprio do objeto 23 . Este tempo, que é o tempo que o seu próprio relógio
registra enquanto o relógio do referencial inercial marca um tempo dt, nos diz que, quanto mais rápido nos
2 3 Na expressão acima colocamos u no lugar de v apenas para explicitar que é a velocidade do objeto em observação e não a
velocidade entre referenciais. De outra forma, S0 sempre estará em movimento com o objeto em questão.
91
movemos, nosso relógio é mais lento em relação a outro relógio que …cou parado.
Para o caso em que v = 0 (um observador no referencial de interesse) temos, obviamente, d = dt0.
Observe que, pela de…nição do tempo próprio, temos
2
(d )
=
=
=
=
"
#
2
1 dx
2
1
(dt) = 1
(dt)
c2 dt
i
1 h
1
2
2
2
2
(dx)
=
(cdt)
(dx)
(dt)
c2
c2
i
h
i
1
1 h
2
2
0 2
0 2
(dx)
=
(dx)
dx
dx
c2
c2
1
dx
dx :
c2
u2
c2
2
Lembrando da invariância de dx por uma TL (30) temos
2
(d 0 ) =
1 0
dx
c2
1
dx
c2
dx0 =
2
dx = (d ) :
Dizemos, com isso, que o tempo próprio é um invariante (o mesmo valor em qualquer referencial).
Obviamente o tempo próprio depende da velocidade do observador. Por exemplo, se um observador A se
move com velocidade tal que a = 2 e outro C com velocidade tal que c = 3 então:
d
a
=
d
c
=
1
dt ;
2
a
1
1
dt = dt :
3
c
1
dt =
O que signi…ca então dizer que d é um invariante relativístico e, conseqüentemente, o mesmo visto por
qualquer observador?
Uma TL informa como um observador vê um dado de um outro observador. Então, se A e C são
relacionados por uma TL a invariância relativística signi…ca que:
d
Ou seja, d 0a não é o tempo próprio de C (d
quantidade é um invariante.
a
0
a
!d
0
a
=d
a
6= d c ), mas sim como C vê o tempo próprio de A e esta
Remark 54 A razão desta quantidade ser um invariante se deve ao fato de todos os observadores terem
concordado em usar o mesmo relógio de um referencial inercial.
92
2.19.2
Quadrivetor velocidade
Voltando agora ao nosso problema da velocidade não ser um 4-vetor, havíamos reparado que o problema
(o fato de não se transformar como as coordenadas) estava na transformação de dt no denominador, pois o
numerador (naturalmente) já se transformava como um 4-vetor. Assim, sendo d um invariante (não muda
por uma TL), certamente a quantidade:
dx
=
d
é um 4-vetor, i.e., se transforma como
0
A quantidade
ciais:
=
dx0
=
d
dx
d
dx
=
d
=
(40)
é chamada de 4-vetor velocidade (ou, simplesmente, 4-velocidade). Suas componentes espa-
i
=
dxi
=)
d
=
dx
;
d
formam uma quantidade híbrida, onde o espaço é medido por um observador num referencial S, enquanto o
tempo é o registrado por um relógio num outro referencial inercial S0 (não necessariamente inercial), mas
visto por um observador em S. Estas componentes espaciais são chamadas de velocidade própria. Isso porque,
se usarmos a própria medida de tempo do referencial de interesse S, onde d = dt, esta quantidade se torna
a velocidade ordinária medida por um observador em S.
2.19.3
Momento relativístico
Nossa tentativa para salvar a lei de conservação dos momentos consiste em tentar usar a 4-velocidade no
lugar da velocidade ordinária v (que sabemos não formar um 4-vetor). Ou seja, p = m . Assumindo que o
momento assim de…nido se conserva temos:
ma
1
a
+ mb
1
b
= mc
1
c
+ md
1
d
;
(41)
onde supusemos que o choque ocorre com a velocidade no eixo x ( 1 ). Quando vista por um observador num
referencial S0, que se move com velocidade v também na direção x, a lei de transformação (40) nos dá:
01
1
=
=
p
1
0
1
2
;
=)
=
93
v
c
1
=
1
01
+
0
:
Com isso, a igualdade (41) se torna:
ma
1
01
a
+
0
a
1
+ mb
01
b
0
b
+
1
= mc
01
c
0
c
+
+ md
1
01
d
+
0
d
Para que a conservação do momento ocorra, i.e., para termos:
01
a
ma
primeiro precisamos que os termos com
0
ma
01
b
+ mb
01
c
= mc
+ md
01
d
;
se cancelem:
0
a
+ mb
0
b
0
c
= mc
+ md
0
d
:
Esta expressão, que toma o lugar da conservação da massa na teoria clássica (37), possui uma conseqüência
importante. Usando a forma explicita da componente 0
0
=
cdt
c
dx0
=q
=q
d
u2
1 c2 dt
1
u2
c2
temos (onde u é a velocidade de cada objeto)24
m
mb
q a
+q
2
u
1 c2a
1
u2b
c2
=q
mc
1
u2c
c2
md
+q
1
u2d
c2
:
Assim, na RR restrita a massa não é uma quantidade conservada. Em seu lugar, se um corpo tem
massa m num sistema onde ele está em repouso, quando se move com velocidade u;a
/ quantidade que se
conserva é
m
mR = q
:
(42)
2
1 uc2
Assim no lugar da conservação da massa da teoria clássica m, temos agora a conservação da quantidade
mR acima. A quantidade mR acima foi chamada por Einstein de massa relativística, enquanto m (a massa
medida no referencial onde o corpo está em repouso) foi chamado de massa de repouso.
Concluído o desenvolvimento acima temos:
Se de…nirmos o momento como p = m a lei de conservação do momento (i.e., a conservação do
momento total do sistema) é consistente com o princípio da relatividade, desde que a massa relativística
(42) também se conserve.
2 4 Observe
que temos duas velocidades no problema, a velocidade do corpo (u) e a dos referenciais (v).
94
Ou seja, temos a conservação das quantidades:
p ; p0
onde
m
p=m = q
1
u2
c2
(43)
dx
mu
; p0 = m
=q
dt
u2
1 c2
0
1
Que podem ser agrupadas nas componentes de uma única quantidade:
p =m
=m
mc
=q
(44)
u2
c2
dx
d
(45)
Esta quantidade, obviamente (como d é invariante), se transforma por uma TL de como
p0 =
p :
Assim a quantidade (45) é um 4-vetor. Este 4-vetor é chamado de 4-vetor de energia e momento 25 (ou
simplesmente, 4-momento).
Sendo a quantidade p (momento) um 4-vetor, temos que o seu produto interno
p
p =
X
pi
2
p0
2
;
(46)
i
é um escalar (i.e., um invariante), ou seja, possui o mesmo valor quando visto de qualquer referencial
inercial. Usando (44) podemos determinar explicitamente o valor deste invariante
X
i
pi
2
p0
2
X
2
2
dxi
dx0
m
d
d
i
12 0
0
X dxi
1
A
@ qcdt
@
q
= m2
2
dt
1 uc2
dt 1
i
"
#
1 X i 2
c2
2
= m
u
2
2
1 uc2 i
1 uc2
=
=
1
c2
m
m2
u2
(c2 u2 )
c2 =
m2 c2 :
u2
c2
12
A
(47)
O que explicita o fato de a massa de repouso ser um invariante, apesar de não ser uma quantidade
conservada.
Resumindo, temos aqui duas quantidades que se conservam (43) e um invariante (46).
25 A
motivação para este nome será apresentada adiante.
95
Exercise 55 Qual a diferença entre uma quantidade conservada e um invariante?
Um invariante é uma quantidade que possui o mesmo valor quando vista de qualquer referencial inercial. Assim a quantidade (46) tem o mesmo valor numérico quando calculado por qualquer
observador. Já uma quantidade conservada é uma que possui o mesmo valor quando calculada pelo
mesmo observador antes e depois de um processo (e.g., o choque entre partículas).
Assim a massa relativística mR é uma quantidade conservada: se um observador num dado referencial calcular a massa relativística total do sistema antes e depois de qualquer processo, ele obterá o mesmo
valor. Entretanto, se calculado por um observador num outro referencial este obterá um outro valor m0R (que
também se conservará), de sorte que mR é uma quantidade que se conserva, mas não é um invariante,
pois, obviamente, depende da velocidade com que o observador vê a o corpo. Por outro lado, assim como d ,
a massa de repouso é um invariante, pois qualquer referencial medirá a mesma massa de repouso de um
corpo, mas não é uma quantidade conservada, pois, como veremos, esta massa pode ser convertida em
outras formas de energia26 . Quantidades como a carga elétrica é um invariante (todos medem o mesmo
valor da carga) e uma quantidade conservada (a carga total antes e depois de um processo é a mesma).
Quantidades como o momento clássico mv não é um invariante nem uma quantidade conservada.
É importante salientar que, assim como a equação de Newton, as leis da mecânica relativistica não
podem ser obtidas de argumentos puramente matemáticos. Ou seja, o fato da quantidade acima realmente
se conservar na natureza precisa ser testada experimentalmente. Assim, encontramos um bom candidato
para uma quantidade que pode se conservar, mas a veri…cação desta hipótese está sujeita a comprovações
experimentais. O mesmo acontecerá com outras quantidade que vamos deduzir. O ponto aqui é que a
conservação do momento relativístico, de…nido acima, é uma das leis da física mais bem testada e con…rmada
experimentalmente.
2 6 Na
teoria clássica a massa era uma quantidade conservada e um invariante.
96
2.19.4
Energia relativística
Recapitulando:
p
p é invariante:
P
i
pi
2
p0
2
=
m2 c2 ;
pi e p0 se conservam (pii = pif );
p0 = m
0
=
q mc
2
1 u
c2
=) mR =
q m
2
1 u
c2
se conserva.
Com o desenvolvimento da TRR a idéia de massa relativística foi sendo abandonada em pró de outra
de…nição. Assim, em trabalhos mais recentes não se faz muito uso desta de…nição. Atualmente se usa apenas
a massa de repouso, chamada novamente simplesmente de massa, e se de…ne a quantidade
E = c:p0 = c:m
0
mc2
= c2 mR ;
=q
2
1 uc2
(48)
como a energia relativística do corpo. Obviamente, se m 0 se conserva, c:m 0 também se conserva, uma vez
que c é uma constante. Observe, entretanto, que isso é apenas uma questão de nomenclatura, pois apenas
uma quantidade se conserva. O resultado físico é que temos uma quantidade conservada (chame-a
de mR ; p0 ou E).
Uma das motivações para o nome de “energia relativística” vem do fato de que, para velocidade muito
inferiores a da luz, podemos fazer uma expansão em v=c e escrever
mc2
E=q
1
u2
c2
1
3 u4
= mc2 + mu2 + m 2 + :::
2
8 c
onde u é a velocidade usual do corpo. O segundo termo da expressão acima é exatamente a energia cinética
clássica do corpo. Assim, em relatividade chamamos de E a energia total do corpo, mc2 a sua energia de
repouso (ou seja, a energia de uma partícula em repouso), enquanto o restante E mc2 é a sua energia
cinética (ou seja, a energia atribuída ao movimento).
Outra motivação para a de…nição acima é a possibilidade de se convertes a energia de repouso em energia
cinética, ou seja, extrair outras formas de energia da massa da partícula. Neste caso, obviamente, a massa
(de repouso) não é conservada, mas a energia relativística sim. Por isso toda a atenção é concentrada na
energia. Ao invés de inventarmos uma nova "lei da conservação da massa relativística", continuamos falando
(apenas com uma releitura) da antiguíssima (e sempre triunfante) lei da conservação da energia.
Em todo sistema fechado a energia (relativística) total e o momento (relativístico) se conservam.
Remark 56 Por isso, no que segue, sempre que falarmos de massa estamos nos referindo a massa de
repouso.
97
Escrita em termos da energia (48) o 4-vetor momento (45) toma a forma
p0
=
p
=
pi
mc
E
q
;
=
2
c
1 uc2
E
;p
c
p0 ; p =
i
= m
=
;
dxi
E i
v ; vi =
:
2
c
dt
(49)
Onde vemos porque este 4-vetor é também chamado de 4-vetor de energia e momento.
Calculando novamente o invariante (46) em termos da energia temos:
X
pi
2
p0
2
=
m2 c2
=
m2 c2
=
m2 c2
i
X
pi
E
c
2
i
2
E2
c2
2
2
c (p)
2
(p)
E2
= m2 c4
(50)
onde usamos (47). Esta expressão nos permite calcular o momento conhecendo-se a energia e vive-versa. As
componentes do momento podem ser calculas usando (49).
Exemplo:
Duas partículas de massa m (sempre estaremos falando da massa de repouso), com velocidade va = 3c=5
e vb = 3c=5 sofrem um choque completamente inelástico27 (ou seja, se fundem). Qual a massa do corpo
resultante?
Os momentos das duas partículas são iguais e de sinais opostos, de sorte que o momento total inicial se
anula. A energia de cada corpo antes da colisão vale:
E a = Eb = q
1
mc2
(3c=5)2
c2
mc2
=q
1
3 2
5
mc2
5
= q = mc2
4
16
25
Assim, a energia total Ei antes da colisão vale
Ei = Ea + Eb =
5 2
mc
2
2 7 Como na mecânica clássica, chamamos uma colisão de elástica se a energia cinética é conservada. No caso de uma colisão
elástica a massa se conserva.
98
Como o momento …nal é nulo, a energia total depois da colisão vale
M c2
Ef = q
1
(0)2
c2
= M c2
A conservação da energia nos dá
Ei = Ef =) M =
2+
5
m
2
59
9
=
25
25
(Observe que estamos falando da massa de repouso.) Que difere bastante do valor 2m esperado classicamente.
Ou seja, a massa prevista pela RR é 25% maior que a massa prevista pela teoria clássica. Resultados
experimentais com a colisão departículas con…rmam o resultado acima.
Remark 57 O resultado acima é provavelmente o mais impressionante e revolucionário resultado da TRR.
Exercise 58 De onde veio os 25% de massa acima? Esta massa foi criada do nada?
Obviamente esta massa veio da energia cinética original do sistema, ou seja, convertemos movimento
em massa.
Exercise 59 Mesmo na análise clássica tínhamos uma lei de conservação da energia. Se, classicamente,
a massa depois do processo é igual a soma das massas e a partícula resultante está parada, pra onde foi a
energia cinética inicial?
Classicamente a energia cinética antes da colisão é convertida em energia térmica. Ou seja, a bola
resultante está aquecida. Isso também é verdade em relatividade. O ponto aqui é que, enquanto classicamente
esta energia térmica representa apenas a energia cinética dos constituintes do corpo, na relatividade ela
in‡uencia diretamente na massa do corpo. Assim, se você pesar um corpo aquecido ele pesará mais que
o mesmo corpo quando frio. Mais ainda, qualquer forma de energia interna do sistema (cinética
ou potencial) se re‡ete na massa deste sistema. Obviamente esta mudança da massa é da ordem da
energia dividida por c2 , o que, em casos cotidianos, representa uma quantidade muito pequena.
Remark 60 Ou seja, se você colocar numa balança dois corpos exatamente iguais (e.g., duas batatas) e
um deles estiver aquecido, este corpo aquecido terá um peso maior que o não aquecido. Isso é válido para
qualquer tipo de energia que um corpo tenha.
2.19.5
Mais do mesmo
O desenvolvimento acima segue uma linha baseada na invariância de certas quantidades por TL. Para quem
este desenvolvimento pareça muito formal pode ser interessante obter o mesmo resultado através de outro
caminho.
99
Por exemplo, imagine que você fez uma série de experimentos num laboratório e constatou que a massa
de um corpo depende diretamente de sua energia e, apenas com base neste resultado você queira saber como
se modi…cam as leis da dinâmica.
Vejamos como o resultado anterior pode ser obtido diretamente da suposição que a massa de um corpo
depende diretamente da energia (e, vice-versa). Ou seja,
E
c2
m (E) =
mE ;
(51)
(onde a constante de proporcionalidade c2 é necessária para acertar as unidades). O trabalho para se mover
este corpo contra uma força F seria
W =
Z
F:dx ) dW = F:dx :
A variação da energia de um corpo com o tempo é igual a variação do trabalho com o tempo
dE
dW
dx
=
= F:
= F:v :
dt
dt
dt
Reconhecendo agora o momento do corpo como p = mE v (onde v é a velocidade ordinária e não a velocidade
própria ) temos, pela lei de Newton,
F=
dp
dE
dp
d (mE v)
)
=
:v =
:v
dt
dt
dt
dt
usando a hipótese (51),
d c2 mE
d (mE )
d (mE v)
= c2
=
:v
dt
dt
dt
Multiplicando por 2mE ambos os lados temos
2mE c2
d (mE )
d (mE vi )
= 2mE
:vi
dt
dt
Se usarmos agora
h
i
2
d (mE )
h
i
2
d (mE v)
=
dt
temos
d
d (mE )
2mE
dt i
h
2
d (mE v)
=
dt
h
dt
c2 mE
dt
2
i
=
100
= 2mE vi
h
i
2
d (mE v)
dt
d (mE vi )
dt
(52)
Integrando esta equação
c2 mE
2
2
= (mE v) + C ;
(53)
com C uma constante. Se a expressão acima for válida para qualquer velocidade, incluindo v = 0, temos
C = c2 m2 ; m = mE(v=0)
onde m é a massa do corpo em repouso. Com isso, retornando para (53),
2
c2 m2E = (mE v) + c2 m2
m2E c2
m2E =
v 2 = c2 m2
c2 m2
m
) mE = q
[c2 v 2 ]
1
v 2
c2
= mR :
Que concorda com a massa relativística mR obtida anteriormente. Com isso,
a mecânica relativística pode ser obtida a partir da mecânica clássica (com a de…nição usual do momento
p = mR v = m e a lei de Newton), adicionando a suposição de que a massa depende da energia
(substituindo m por mR ).
Assim, se na resolução de um problema de mecânica relativística você se esquecer dos invariantes, quantidades relativísticas conservadas etc., basta usa a mecânica Newtoniana substituindo a massa de repouso pela
massa relativística. Esta é a abordagem mais comum, principalmente em livros mais antigos. Entretanto,
como vimos, a idéia de massa relativística caiu em desuso em pro do conceito de energia relativística. Como
veremos, esta reformulação é especialmente útil quando valamos de fótons. Além disso, o desenvolvimento
formal que …zemos permite introduzir a importante idéia de espaço-tempo e de quadrivetores, idéias indispensáveis no tratamento de problemas mais so…sticados (e na compreensão de artigos cientí…cos), especialmente,
em problemas de eletromagnetismo.
2.19.6
Fissão e fusão
Ao discutirmos o exemplo do choque inelástico das partículas acima, chegamos a conclusão que toda a energia
cinética foi convertida em massa e esta massa estava relacionada com a energia cinética interna (ou qualquer
outra energia interna) dos constituintes deste corpo. No caso desta energia ser uma temperatura e se o corpo
entrasse em contato com o ambiente ele poderia esfriar, irradiando assim a sua energia extra para o ambiente
(e perdendo massa!).
No caso de sistemas microscópicos, ou mesmo partículas elementares, o sistema não possui uma estrutura
interna com constituintes su…cientes para comportar toda esta energia extra da colisão (não há o que …car
vibrando lá dentro). Desta forma, esta energia extra é expelida (irradiada) logo após o processo de ligação
na forma de radiação.
101
Se no memento da colisão de duas partículas de massa ma e mb o sistema possui uma energia cinética
total K a energia …nal do sistema vale
E = c2 (ma + mb ) + K
R
onde R é a energia irradiada. Sendo a massa determinada pela energia, a massa …nal do sistema vale
M = (ma + mb ) +
(K
R)
c2
:
Assim, se a energia cinética total do sistema na colisão vale K e o sistema irradia uma energia R, temos
duas opções:
1. Se R < K () M > ma + mb
2. Se R > K () M < ma + mb
Como mencionado acima, se o sistema não possuir uma estrutura interna su…ciente para “armazenar”
a energia cinética da colisão a única opção é irradiar esta energia. . Com isso, o que ocorre nos processos
envolvendo sistemas mais simples (como partículas ou núcleos leves) é que M < ma + mb , i.e., a energia
irradiada é maior que a cinética. Assim, neste processo uma parte da massa das partículas originais é
transformada em energia.
Por exemplo, uma partícula (um núcleo de hélio) é cerca de 0; 7% mais leve que a soma de dois prótons
e dois nêutrons (que são os seus constituintes). A diferença de energia correspondente a esta diferença de
massa é exatamente a energia necessária para se separar as partículas.
Uma vez que a energia cinética K é a energia que precisamos dar ao sistema para realizar a colisão e
formar o objeto …nal, como R > K a energia irradiada nos processo de fusão de duas partículas é maior que
a introduzida e esta diferença vem da diminuição da massa do sistema. Ou seja, no processo de fusão
convertemos massa diretamente em energia.
Esta conversão também esta presente nos processos convencionais. Por exemplo, se explodirmos 20
kilotons de TNT é possível veri…car que a poeira que sobra da explosão é cerca de 1 grama menor que a
massa original. Imaginado o estrago que 20 Ktons de dinamite podem fazer, você pode imaginar o resultado
da transformação de 1 grama de matéria em energia. Neste exemplo a massa do sistema variou 5 10 9 %,
vemos assim como a energia envolvida na produção da partícula (0; 7%) é muito mais e…ciente.
O processo de produção de energia pela fusão de núcleos atômico é como o sol produz a sua energia.
Para promover a separação da ligação descrita acima, precisamos compensar a massa extra necessária
para a existência das partículas separadamente. Assim, para dissociar a ligação temos de fornecer ao sistema
uma energia igual a diferença de massa. Esta energia é igual a energia de ligação do sistema. Como pode
ser veri…cado com exemplos concretos (exercícios), esta energia é usualmente muito grande de sorte que as
partículas formadas no processo de fusão são bastante estáveis.
102
Exercise 61 Sabendo que a massa do próton vale 1; 007276466812 u (unidade de massa atômica), a do
nêutron 1; 00866491600 u e a da partícula alfa 4; 001506179125 u, qual a energia liberada (em eV) na fusão
desta quatro partículas.
Para partículas maiores (e.g., o urânio com 92 prótons e 143 nêutrons), como núcleos de átomos mais
pesados, ou mesmo moléculas, a estrutura interna do sistema é grande o su…ciente para comportar (reservar)
parte da energia cinética da colisão. Para tais sistemas K > R de sorte que o sistema ligado tem uma
massa maior que a massa dos constituintes separadamente (M > ma + mb , como no exemplo da colisão visto
anteriormente). Assim, quando separadas a diferença de massa é liberada na forma de energia. Diferente das
partículas menores descritas acima, esta energia extra age na intenção de separar o sistema (contra alguma
força de ligação, como nuclear ou eletromagnética). Assim, estes sistemas tendem a se separar espontaneamente e liberar esta energia extra, i.e., tais sistemas são instáveis (mas este tempo de decaimento é
geralmente muito grande, da ordem de milhões de anos). Mas, obviamente, esta separação pode ainda ser
estimulada pelo fornecimento de mais energia ao sistema. Assim, ao fornecer ao sistema uma certa energia E
este se separa liberando, não apenas a energia E fornecida, mas também a energia da diferença das massas
(ma + mb M ). Este é o processo de …ssão.
O processo de …ssão é o envolvido nas primeiras gerações (1945) de bombas atômicas (ou bomba-A). Os
materiais radioativos geralmente usados neste tipo de bomba são o urânio-235 e o plutônio-239 (os números
se referem a massa atômica do material). Neste tipo de dispositivo, menos de uma tonelada de material
radioativo é capaz de produzir o mesmo efeito de 500.000 toneladas de TNT.
A segunda geração de bombas atômicas (1952), conhecidas como bombas de hidrogênio (ou bomba-H,
ou ainda bomba termonuclear) utilizam o processo de fusão descrito anteriormente. Neste tipo de bomba
existe uma bomba-A auxiliar (chamada de gatilho) que é responsável pela energia necessária para o processo
de fusão. Este tipo de bomba utiliza como material isótopos do hidrogênio: o deutério e o trítio. Este
processo é absurdamente mais e…ciente que o de …ssão. Uma bomba termonuclear moderna pode gerar, a
partir de pouco mais de um quilo de matéria, a energia liberada por 1,2 milhões de toneladas de
TNT.
O processo de …ssão é o utilizado nas usinas nucleares para a produção de energia. Um dos desa…os atuais,
e uma esperança para o problema da crise de energia, é se produzir, de forma controlada, o processo de fusão.
103
2.19.7
Fótons
Acima vimos que atualmente o conceito de energia relativística é preferido ao de massa relativística. Com
o salientamos, esta escolha é apenas uma questão de nome. Entretanto, este é um ótimo exemplo de como
uma simples reinterpretação dos mesmos resultados pode levar a novas conclusões.
Os fótons viajam a velocidade da luz c, assim, sua massa relativística seria:
mR = p
m
m
=
0
1 1
ou seja, se o fóton tiver qualquer valor de massa diferente de zero, sua massa relativística seria in…nita. Em
outras palavras, qualquer fóton carregaria um momento (e, conseqüentemente, uma energia) in…nita e uma
simples lanterna seria uma arma mortal. Entretanto, se m = 0, temos uma indeterminação na expressão
acima, ou seja, uma partícula que viaje sempre a velocidade da luz pode ter uma massa relativística (ou
uma energia relativística) …nita, mesmo tendo uma massa de repouso nula. Obviamente tal idéia não faz
sentido na mecânica clássica, onde qualquer partícula sem massa teria sempre momento e energia iguais a
zero. Como vimos, na TRR a massa não é a única responsável pela inércia dos corpos, mas também qualquer
forma de energia que este corpo carregue.
Vamos então, como feito antes, abandonar a idéia de massa relativística e trabalhar com o conceito
de energia relativística. Neste caso, podemos por um momento esquecer a expressão acima e trabalhar
diretamente com o invariante obtido na expressão (50)
2
E2
(cp) = m2 c4 :
E, para evitar o problema descrito no primeiro parágrafo, vamos assumir que a massa de repouso do
fóton é zero e assumir que isso nos dê um valor …nito para a energia relativística28 . Esta última suposição
pode, obviamente, ser comprovada experimentalmente (e.g., no efeito fotoelétrico). Observe que enquanto a
pergunta sobre a massa relativística do fóton pode trazer dúvidas, ninguém duvidaria que o fóton tenha uma
energia …nita. Neste sentido a reinterpretação citada acima permite o desenvolvimento natural das idéias.
Com isso, a expressão acima se torna:
E2
2
(cp) = 0 =) E = c jpj :
Assim, uma vez determinada a energia do fóton (e.g., através do efeito fotoelétrico), podemos a…rmar que
este possui um momento
E
:
p=
c
Ou seja:
2 8 Obviamente, poderíamos falar que a massa relativística é …nita, mas este jargão não é usado. Falamos sempre que o fóton
não tem massa, mas tem energia.
104
o fóton não possui massa, mas possui momento.
Observe como é importante o fato da velocidade do fóton ser sempre c. Caso contrário, quando a
velocidade fosse menor que c a sua energia relativística seria (obrigatoriamente) nula e ele não teria nem
massa, nem energia, nem momento, nem nada. Ou seja, os fótons não poderiam interagir com nada e seria
como se eles não existissem.
Neutrinos são partículas que viajam a uma velocidade próxima (mas diferente) da luz. Durante algum
tempo especulou-se que a massa do neutrino também fosse nula, mas experimentos realizados em 1998
mostram que eles carregam uma massa bem pequena.
Classicamente uma partícula de massa nula teria também momento nulo. Mas na relatividade isso não é
verdade. Além disso, pela conservação do momento, obviamente este momento do fóton pode ser transferido
para outro corpo num problema de espalhamento. Este momento ao ser transferido para os objetos massivos
exerce a chamada pressão de radiação. É a pressão da radiação solar que destorce a calda dos cometas
fazendo as aponta na direção contrária ao sol. Existem até propostas da NASA de velas que funcionariam
com a pressão da radiação solar.
Podemos ter processos em que a massa do sistema desaparece completamente e é convertida em energia,
e.g., eletromagnética. Como também processos onde massa é criada apenas de radiações.
Exercise 62 Um pion neutro (isso é importante pela conservação de carga) decai em dois fótons. Sabendo
que a massa de repouso do pion vale 2; 4 10 28 kg, qual o momento dos fótons criados. É possível que o
pion decaia em apenas um fóton? Justi…que sua resposta.
Este tipo de processo onde toda a massa do sistema é transformada em energia eletromagnética é chamado
de aniquilação.
Por outro lado, para campos eletromagnéticos muito intensos é possível termos a criação de partículas
e suas respectivas anti-partículas. Observe que nestes processos uma série de leis de conservação deve ser
satisfeita (e.g., momento, momento angular, carga). A princípio, a relação entre massa e energia implica que
qualquer energia (desde que grande o su…ciente) possa ser convertida em massa de repouso. Desta forma,
mesmo campos gravitacionais muito intensos podem criar pares de partículas. Provavelmente este tido de
efeito ocorre nas vizinhanças de um buraco negro.
Em mecânica os corpos se distinguem por suas características como massa, velocidade carga etc., se todos
os fótons têm a mesma massa (m = 0) e viajam sempre a mesma velocidade, então todos os fótons são iguais?
A resposta para esta pergunta foge ao escopo da relatividade e entra nos domínios da mecânica quântica.
Como veremos, a energia dos fótons está diretamente relacionada com a sua freqüência ( ) de acordo com a
chamada fórmula de Planck, E = h , onde h é a constante de Planck. Assim, um fóton azul é mais energético
que um vermelho, podendo assim transferir um momento maior para um outro sistema.
É importante notar que no eletromagnetismo a razão entre a energia e o momento de uma onda eletromagnética também é uma constante. Para uma onda monocromática com intensidade de campo elétrico E0
105
temos
hEi =
1
1
"0 E02 ; hpi = "0 E02
2
2c
e, portanto
hEi = hpi c :
Este resultado, que concorda com (??), vem do fato do fóton ser a partícula associada com a quantização do
campo eletromagnético.
Além disso, a possibilidade de da criação de pares faz com que qualquer teoria que descreva satisfatoriamente o comportamento de partículas carregadas em campos eletromagnéticos deve comportar a criação e
aniquilação das cargas. Isso é o que ocorre nas equações de Klein-Gordon e na equação de Dirac.
2.20
Dinâmica relativística
Como vimos com os resultados anteriores, a dinâmica de corpos pode ser descrita usando a lei de Newton,
desde passemos a usar o momento relativístico
F=
dp
m
; p=m = q
dt
1
u2
c2
u:
Vejamos então o que acontece, por exemplo, quando uma partícula, inicialmente em repouso, é sujeita a uma
força constante, F =constante. Obviamente, neste caso, podemos analisar o problema apenas na direção da
força
Z t
dp
F =
=) p =
F dt + C = F t + C
dt
0
Como a partícula estava inicialmente em repouso, em t = 0 devemos ter o momento inicial
0 = F 0 + C =) C = 0
com o que
p = Ft
usando a forma explícita de p temos
m
p = Ft = q
1
106
u2
c2
u
resolvendo para a velocidade
2
F
t
m
1
=
1
u2
u
1
u2
+
2
F
mt
h
=
u
1
1
=
2
u2
c2
1
1
u2
1
c2
;
1
;
c2
2
F
mt
i
2
F
+ mc
t
F
t
q m
F
t
1 + mc
=
1
=
2
;
:
O numerador é a resposta obtida com a mecânica clássica, que seria o que obteríamos da expressão acima
para o caso(F=m) t << c. O denominador, entretanto, nos diz que, com o passar do tempo a taxa de aumento
develocidade diminui.
"
#
2
F
1
F
q
u_ =
1
t
2
F
2
mc
F
1
+
t
m 1 + mc t
mc
=
F
mh
1
1+
i
2 3=2
F
mc t
ou seja, diferente do resultado clássico a partícula não sofre uma (des)aceleração constante.
A idéia é que a massa (relativística) vai aumentando com a velocidade, de sorte que, para mantermos a
aceleração, devemos aumentar constantemente a força.
Da expressão para u temos também a velocidade limite para a partícula, pois, quando t ! 1,
u= q
F
m
1+
(t ! 1)
F
mc
(t ! 1)
2
=
Como sabemos, a velocidade limite para a partícula vale c.
107
F
m (t ! 1)
F
mc (t ! 1)
!c:
Para estudar a posição da partícula com o tempo,
u
=
x (t)
=
=
x (t)
=
F
t
dx
q m
;
=
2
dt
F
1 + mc
t
Z
t0
F t
q
dt
m 0
F 0 2
1 + mc
t
2
3t
s
2
F 4 mc 2
F 0 5
;
1+
t
m
F
mc
2s
3 0
2
2
mc 4
F
1+
t
15 :
F
mc
Reescrevendo esta equação na forma
Ax + 1 =
A=
1
q
mc2
F
2
(Ax + 1)
2
1 + (Ct)
; C=
F
mc
2
(Ct) = 1
y = Ax + 1 ; z = Ct
y2
z2 = 1 ;
ela pode ser reconhecida como a equação de uma hipérbole. Ou seja, no lugar da parábola clássica x / t2 ,
relativisticamente temos uma hipérbole. Por isso, o movimento relativístico sob uma força constante é
chamado de movimento hiperbólico. Ele ocorre, por exemplo, quando uma partícula carregada e colocada
num campo elétrico uniforme.
108
Figure 11: Figura tirada do Gri¢ th,Introduction to electrodynamics-3ed.
Diferente do que ocorre com as duas primeiras leis de Newton, a terceira lei não pode ser estendida
para os domínios da mecânica relativística. Pois, de acordo com esta lei, objetos separados espacialmente que interajam por uma força exercerão, sempre no mesmo instante, forças iguais e opostas. Como
vimos, o fato de um evento ser simultâneo depende do observador. Assim, se um observador vê num instante
t uma força F (t) agindo no corpo A e F (t) agindo em B (de sorte que a terceira lei se aplica para este
observador), um outro observador em movimento a…rmará que as forças são iguais em tempos diferentes, pois
t0A =
t
uxA
c2
6= t0B =
t
uxB
c2
;
de sorte que, para este observador, a terceira lei não mais valerá. Apenas quando a força de interação é
constante, ou quando é uma força de contato (agindo no mesmo ponto) a terceira lei continuará válida.
109
2.21
Lei de transformação das forças
Pelo fato da força por um observador ser medida com relação ao seu tempo (dt), esta quantidade sofre do
mesmo problema da velocidade, ou seja, não é um quadrivetor, mas sofre a transformação29 :
Fi
Fi
dpi
dpi
dpi
=c
= c 0 ! Fi ;
dt
cdt
dx
d i p
d i p
dpi
=c 0 0
= c 0 =c 0
dx
dx
( 0 dx +
=
=
F0
=
i dp
dt
0
0
+
=
0 dxi
i dt
1
c
i
0
0
i
=c
0 dxi )
i
F
+ 1c
0
0
cdt
dp
+
0 dxi
i dt
1
c
;
0 ui
i
dp0
1 dE
=
dt
c dt
A componente F 0 , a menos do fator 1=c é proporcional a variação de energia da partícula, o que, como vimos
é igual a variação do trabalho realizado. Ou seja, é a potência entregue à partícula.
Para o caso de v na direção x temos
0
B
B
=B
B
@
e
Fy = F 2 =
F
0 + 1
0
c
2
0
0
0 ui
i
0 0
0 0
1 0
0 1
0
0
C
C
C
C
A
F2
=
1
Da mesma forma
1
Fy
=
cu
1
1
c ux
Fz
Fz =
1
c ux
Já para a componente x,
Fx
= F1 =
1
=
dE
c dt
1
2 9 Lembre-se
que
e
0
0
1 dE
c dt
=
Fx
1
F
+ 1c
+ F1
0 u1
1
=
1
0
0F
1
+
1
1
1F
cu
1
=
F0 + F1
1
cu
1
;
1
cu
+ Fx
cu
1
se referem à velocidade v relativa entre os referenciais que, ao contrário de u, é uma constante.
110
Usando a relação (52) temos
F=
dp
dE
dp
)
=
:u = F:u ;
dt
dt
dt
temos
Fx =
Fx
c
(F:u)
c ux
1
:
Vemos então como em geral a transformação da força é bastante complicada.
Assim como no caso da velocidade, podemos, obviamente, evitar este comportamento indesejado se substituirmos a derivada em relação ao tempo pela derivada em relação ao tempo próprio. Assim, podemos
de…nir
dp
dp
1
1
dp
= q
=q
=q
F
K=
2
2
2
d
dt
dt 1 uc2
1 uc2
1 uc2
Da mesma forma como …zemos com a velocidade, podemos também de…nir
K0 =
1 dE
dp0
=
d
cd
A quantidade
K =
dp
d
assim de…nida se transforma como um 4-vetor. Este 4-vetor recebe o nome de força de Minkowski. Assim
como F 0 , K 0 é a potência transferida ao sistema em unidades de tempo próprio.
A mecânica relativística pode ser formulada em termos da força ordinária (ou usual), ou através da força
de Minkowski. Devido ao seu caráter vetorial, esta ultima é, geralmente, mais conveniente. Entretanto, como
normalmente estamos interessados na dinâmica da partícula vista por um observador (nós), geralmente temos
de passar da força de Minkowski para a usual.
K
0
1
dE
1
1
;q
= @ q
2
c 1 u dt
1
c2
0
1
1
= @ q
F:u; q
u2
c 1 c2
1
0
1
1
1
= @ F: ; q
FA
c
u2
1
u2
c2
u2
c2
1
FA
1
FA
c2
Esta quantidade será especialmente útil quando estudarmos problemas de eletromagnetismo.
111
2.21.1
Exemplo 1
Vamos voltar no movimento hiperbólico (força constante)
F = (F; 0; 0) :
Se traduzirmos este problema em termos da força de Minkowski temos
K
1
1
dE
1
= @
;q
FA
cd
u2
1 c2
0
1
1
1
= @ q
F:u; q
FA
2
2
c 1 uc2
1 uc2
0
1
F
u
F
x
= @ q
;q
;0; 0A :
2
2
c 1 uc2
1 uc2
0
(54)
Observe que F é constante mas K não.
2
Vamos primeiro veri…car um fato. Se K é um 4-vetor, a quantidade (K) (pra qualquer problema) é um
invariante. Neste caso, usando a segunda expressão em (54) é fácil ver que
K
K
32 2
F
u
4 q x 5 + 4q F
2
c 1 uc2
1
2
=
=
F2
1
u2
c2
1
u2x
c2
u2
c2
32
5
=1:
Constante, como esperávamos.
Das expreções acima temos também:
F ux
dE
dE
=q
;
= F ux
2
d
dt
1 uc2
Onde sabemos que ux = ux (t)
Exercise 63 O que signi…ca dizer que a energia se conserva se acima vemos que E varia com o tempo? A
energia relativística não deveria ser uma constante?
O ponto aqui é que não estamos considerando um sistema como um todo. O sistema consiste na nossa
partícula mais a fonte geradora da força constante. Assim, o aumento da energia cinética (e conseqüente
112
energia relativística) da nossa partícula, tem por conseqüência uma diminuição na energia da fonte geradora
do campo.
Vamos agora resolver novamente o problema através da força de Minkowski (FM). Usando agora a generalização lei de Newton com a força de Minkowski temos
dp0
F
ux
= q
d
c 1
K0 =
=
u2
c2
F
c
x
=
F dx
;
c d
onde usamos a forma de K 0 na última linha de (54). Com isso
F dx
F
dp0
=
) dp0 = dx
d
c d
c
Integrando em relação a x
c
x=
F
Z
p0f
dp0 =
po
i
c 0
p
F f
p0i =
1
[Ef
F
Ei ]
Como a partícula está inicialmente parada, sabemos que sua energia inicial vale
Ei =
Já a sua energia …nal
Ef =
Tudo que precisamos agora é achar
conta que …zéssemos antes)
K1 =
mq
1
x
x.
q
2
q
p
2
2
(mc2 ) + (pc) = mc c2 +
x
u2
c2 df
=q
1
F
u2
c2
(t = 0) =) C = 0 =)
Com isso temos
2
Ef = mc
e, …nalmente,
2
s
1 4 2
x (t) =
mc 1 +
F
2
x
Usando a componente 1 da FM temos (esta é exatamente a mesma
dp1
d
F
=m x = q
d
d
1
d
2
(mc2 ) + (pc) = mc2
F
t
cm
2
;
u2
c2
=)
=
x
d x
F
=
=)
dt
m
x
F
t+C ;
m
F
t:
m
s
1+
3
F
t
cm
2
2s
2
mc
4 1+
mc2 5 =
F
113
=
F
t
cm
2
3
15 :
O que concorda com nosso resultado anterior.
Obviamente um procedimento análogo pode ser usado com a força F usando a relação clássica
dE
= F:u
dt
Mas, para isso, lembre-se que você deve usar o momento e a energia relativística, o que já está implícito
no procedimento acima. Observe que, no desenvolvimento acima, as quantidades que se conservam são os
4-vetores.
2.21.2
Exemplo 2
Vamos tratar outro exemplo simples. Imagine uma pedra de massa m que é atirada com velocidade u0
na direção horizontal (que chamaremos de x) e, ao mesmo tempo, cai sob a ação de uma força constante
F = F ( y^). Tomando em conta apenas o plano x; y temos
F = (0; F ) =
F y^ ; u (t = 0) = (u0 ; 0) = u0 x
^:
Estas quantidades se referem a um observador num certo referencial S. Como de costume, para resolver o
problema o observador utiliza a lei de Newton (com o momento relativístico) e resolve, separadamente,
o problema na direção x e y. O problema na direção y
Fy
dpy
=
dt
=
m
=
F
F =
q
1
u2
c2
q
1
u2
c2
m
=
"
"
d
m
dt
u_ y +
u_ y +
y
uy
1
u2
c2
uy
1
u2
c2
=
2
d 4
m
q
dt
1
#
(uu)
_
2
c
u2
c2
3
uy 5
(ux u_ x + uy u_ y )
c2
#
Enquanto para a componente x temos:
0
d @
1
q
dt
1
u2
c2
Fx =
1
ux A =
dpx
d
= m ( x) = 0
dt
dt
#
"
1
ux 1
q
u_ x +
(uu)
_ =0
2
2
1 uc2 c2
1 uc2
114
Ou seja, precisamos resolver o sistema de equações:
F
=
m
1
ux
u_ x +
2
3
(ux u_ x + uy u_ y ) 5
c2
uy
4u_ y +
u2x +u2x
c2
1
1
(ux u_ x + uy u_ y ) = 0
c2
u2x +u2x
c2
1
1=2
u2x + u2x
c2
O qual, obviamente, é bastante complicado, pois as variáveis estão acopladas.
Vamos agora tratar o mesmo problema usando a força de Minkowski.
0
K=@
com
1 dE
1
;q
cd
1
F = (0; F ) =
temos
u2
c2
1
F
K=@
c
K0
=
dp0
=
onde
0
1
1
FA = @ F: ; q
c
1
u2
c2
1
FA
F y^ ; u (t = 0) = (u0 ; 0) = u0 x
^:
0
Para a componente K 0 temos
1
y ; 0;
q
F
u2
c2
1
1
; 0A
F
F dy
dp0
=
=
;
d
c y
c Zd
c
F
dy =) y =
dp0 =
c
F
1
[Ef
F
q
q
2
2
Ef = (mc2 ) + (pc) = mc c2 +
2
x
Ei ] ;
2
y
+
Mais uma vez, tudo que precisamos é achar . Para a componente K 1 temos
K1 =
dp1
d
= 0 =) m
d
d
1
= 0 =)
1
=
x
=
1
0
= const. ,
onde a constante é determinada pela condição inicial
1
= rn
1
1
u(t)
c2
2
1
o u (t) =) (t = 0) ;
115
1
u0
=q
1
u20
c2
=
1
0
(55)
Para a componente K 2 temos
K2 =
d
dp2
=) m
d
d
2
=q
1
F
=)
u2
c2
F
d 2
=
=)
dt
m
2
=
y
Ft
:
m
=
Onde já usamos o fato de que uy (0) = 0. Com isso, a expressão para a energia toma a forma
v
u
u
E = mctc2 +
u20
+
u20
c2
1
2
Ft
m
= mc3
O que fornece uma energia inicial Ei
3
Ei = mc
s
s
1
u20
c2
2
Ft
c2 m
+
:
1
u20
c2
Substituindo na nossa expressão para y temos
y
uy
=
1
[Ef
F
2s
1
Ft
1
mc3 4
+
F
c2 u20
c2 m
2v
)3
u(
2
u
1
d
1
Ft
5=
mc3 4t 2
+
F
dt
c
u20
c2 m
= y_ =
Ei ] =
s
2
F
t
cm
1
c2
u20
(
1
3
5 ;
u20
c2
Ft
c2 m
+
2
)3=2
:
Para a direção x, voltamos a expressão (55)
1
=
1
0
=) ux =
1
0
s
1
u2
c2
ux
=)
2
u2
=1
c2
=1
1
0
u2x + u2y
c2
Isolando ux temos
u2x
"
1
2 + c2
1
( 0)
1
#
u2y
=1
c2
=1
1
c2
Usando
F
t
cm
2
(
1
c2
u20
+
Ft
c2 m
2
)3
:
u2
1 c20
1
1
1
+ 2 = 2 ;
+
=
2
2
2
1
c
u0
c
u0
( 0)
1
temos
2
ux = u0 41
1
c4
F
t
m
2
(
1
c2
u20
+
Ft
c2 m
2
)3 31=2
5
:
Ou seja, mesmo na direção x, onde não temos nenhuma força atuando, o movimento não é uniforme.
116
Exercise 64 O que aconteceu então com a conservação de momento na direção x?
É exatamente esta conservação de momento que faz a velocidade não ser constante. Conforme a partícula
é acelerada pela força (independente da direção) ela adquire massa relativística. Assim, para conservar o
momento na direção onde não há força, a velocidade tem de diminuir.
Observe também que, como deveríamos esperar, esta correção é da ordem de 1=c2 .
117
Outra forma de resolver o problema anterior seria através de um referencial S0 que se movesse com
velocidade u0 na direção x. Neste caso, a velocidade inicial na direção x seria u00 = 0. Entretanto, para fazer
isso, precisamos ainda transformar as forças. Pelas expressões obtidas anteriormente, temos:
Fy0
=
Fz0
=
Fx0
=
Fy
1
F
=
q
1
=
c ux
Fz
1
Fx
(F:u)
c ux
=
c
(F:u)
onde
F2
mt
F uy = q
F:u = Fy uy =
2
F
mc t
1+
com isso
Fx0
=
=
Fx0
=
c
u20
c2
c ux
c
1
=0
1
F2
mt
(F:u) =
u0
c
u0
q
c2
c
q
1+
2
F
mc t
F2
mt
1+
2
F
mc t
Ou seja, neste caso tempos o aparecimento de uma força na direção x que será responsável pela aceleração
da partícula nesta direção.
2.21.3
Espalhamento Compton
Em 1923, analisando o espectro de transmissão de raio X com comprimento 0 , Compton descobriu que,
além de um feixe transmitido de comprimento 0 , havia também um feixe de comprimento 1 , maior que 0 ,
cuja diferença depende apenas do ângulo de espalhamento, e não do material da folha.
Conservação do momento na vertical
p1 sin = p sin
(56)
Conservação do momento na horizontal
p0 = p1 cos + p cos
118
Figure 12: Figura tirada do livro Eisberg , Física Moderna
Isolando os ângulos e quadrando esta equações temos
p21 sin2
= p2 sin2
p2 cos2
=
2
(p0
p1 cos )
Adicionando estas equações
p21 sin2 + (p0
p21 sin2 + p20
2
= p2 sin2
p1 cos )
2p0 p1 cos + p21 cos2
p21 sin2 + cos2
= p2
+ p20
2p0 p1 cos
= p2
p21 + p20
2p0 p1 cos
= p2
Agora, pela conservação de energia temos:
E0 + mc2 = Ef + Ee
onde Ef é a energia do fóton e Ee a do elétron. Lembrando que
p
temos
Ee =
Com isso
2
p =) E 2
(cp) = m2 c4
q
2
m2 c4 + (cp)
E0 + mc2 = Ef +
q
2
m2 c4 + (cp)
119
+ p2 cos2
(57)
Figure 13: Figura retirada do Gri¤tths.
Usando (57) temos
2
E0 + mc = Ef +
Usando agora
q
m2 c4 + c2 (p21 + p20
2p0 p1 cos )
E0
Ef
; p0 =
c
c
p1 =
temos
2
E0 + mc
E0 + mc2
2 2
E0 + mc
E02
2
2 2
+ 2E0 mc + mc
2
2E0 mc
Ef
2
2 E0 + mc
2
Ef
q
2
2
= Ef + m2 c4 + (Ef ) + (E0 )
2
2
2 4
2
2E0 Ef cos
2 4
2
2E0 Ef cos
= m2 c4 + (Ef ) + (E0 )
= m c + (E0 )
2
Ef
= m c + (E0 )
2
Ef
=
Ef
=
Ef
=
Ef
=
2 E0 + mc
2 E0 + mc
2E0 Ef cos
E0 mc2
E0 + mc2 E0 cos
E0 mc2
E0 (1 cos ) + mc2
1
h
i
1
1
(1 cos ) mc
2 + E
0
Usando agora
=
E0
c
= h
0
=h
c
0
120
; Ef = h
c
1
2E0 Ef cos
2E0 Ef cos
temos
h
c
=
1
(
1
0)
=
(1
(1
1
1
cos ) mc
2 +
cos )
C
;
C
0
ch
=
ch
mc2
C é chamando comprimento de onda Compton e a equação acima a equação de Compton. Vemos diretamente
desta equação que a diferença no comprimento da luz espalhada com a incidente aumenta com o ângulo de
espalhamento. E depende apenas do ângulo. O processo descrito acima é chamado de espalhamento Compton.
Observe que no desenvolvimento acima supusemos que o elétron estava livre (não ligado ao átomo). Esta
suposição é válida quando l0 é muito maior que a energia de ligação do elétron com o átomo. Em especial,
participam do espalhamento apenas os elétrons livres ou os fracamente ligados nas camadas mais externas
dos átomos.
Dos grá…cos acima é possível observar um espalhamento de um cumprimento de onda l0 igual o incidente. Esta componente se deve ao espalhamento pelos elétrons mais internos, que estão fortemente ligados
ao átomo. Neste caso (como veremos no curso de quântica) a energia dos elétrons não se altera e o espalhamento corresponde apenas uma alteração na direção do fóton. Este tipo de espalhamento é chamado de
espalhamento Thomson e pode ser descrito, como feito por Thomson em 1900, diretamente com resultados
do eletromagnetismo.
O espalhamento Thomson é predominante quando:
0
>>
C
ou seja, para raio x com energia mais baixa.
A idéia aqui é que o raio x, ou qualquer radiação eletromagnética, interage preferencialmente com elementos da mesma ordem de grandeza do seu comprimento de onda. Assim, para comprimentos de onda maiores
a radiação enxerga o átomo como um todo e temos o espalhamento Thomson. Quando o comprimento de
onda diminui a radiação para a interagir com os elétrons.
Exercise 65 Por que o núcleo do átomo tem pouca participação no processo acima?
121
2.22
Mais um pouco sobre notações
Se a e b são quadrivetor, sabemos que a seguinte quantidade é um invariante
ab = a
b :
O uso do produto de vetores é tão comum que introduzimos uma nova notação para indicá-lo
ab = a b ; b =
b :
Com isso, temos agora quantidades representadas com índices em baixo. Para diferenciá-las,
chamamos de 4-vetor contra-variante as quantidades representadas com índices em cima e co-variante, as com
índices em baixo. Vemos então que a métrica do espaço permite transformar um vetor contra-variante num
co-variante. Na nossa representação matricial, os vetores contra-variantes são representados como colunas,
enquanto os co-variantes são representados como matrizes linha.
Como vimos, ao caráter das quantidades é especi…cado pela sua lei de transformação. Então, pelo que foi
dito anteriormente, toda quantidade que, por uma transformação de Lorentz , se transforma por
b =
b
é um vetor- contra-variante.
De forma semelhante, dizer que uma quantidade é um vetor co-variante, signi…ca que esta quantidade
também respeita uma lei especí…ca de transformação. Obviamente, esta lei deve ser diferente da acima (caso
contrário, não haveria razão para darmos um nome diferente). Como se transformam então, por uma TL ,
os vetores co-variantes? Ou seja
x ! x0 : b0 = M
b ; M
=?
Qual a forma explícita de M e como esta quantidade se relaciona com
voltemos à de…nição acima. Desta de…nição sabemos que
a0 b0 =
a
M
b
o caráter invariante de ab permite escrever
a0 b0 =
M
a M
b =a b
a b =a b
122
. Para responder esta pergunta,
Para quaisquer vetores a e b. Isso só é possível se
M
=
ou seja
1
M=
:
Ou seja, um vetor por uma TL L um vetor covariante se transforma pela inversa da matriz que representa a
transformação:
1
b0 = b
:
(58)
Podemos agora de…nir:
, se transforma como:b0 = b
Um vetor co-variante é qualquer quantidade que, por uma TL
1
Para compatibilizar o desenvolvimento acima com o feito em aula, use as relações
h
i
1
=
=
=
h
=
2.23
1
i
1
=
=
1
1
1
Gradiente em 4D
Além da de…nição acima, de formar um vetor co-variante através de um contra, existem também quantidade
que naturalmente surgem como vetores co-variantes. Por exemplo,
@x @
@
=
@x
@x @ x
@x
x =
x =)
=
@x
@
@x @
@
=
=
@x
@x @ x
@x
x ! x =)
123
@x
=
@x
=
.
Ou seja
@
@x
@
@x
=
@
=)
@x
=
1
h
i @
=
@x
1
@
@
=)
=
@x
@x
1
1
@
@x
@
@x
Assim, a quantidade @=@x se transforma como um vetor co-variante. Observe que a derivada
@
@xi
é o que chamamos de componente i do gradiente, podemos assim dizer que
@
@x
é um gradiente quadridimensional.
(Co-gradiente e contra-gradiente)
Antigamente (nos livros de geometria diferencial) se usava vetores co-gradientes, para aqueles que se transformavam como o gradiente e contra-gradiente, para aqueles que se transformavam de forma “contrária”
ao gradiente. Atualmente esta nomenclatura não é mais usada.
Além disso, é costume escrever o gradiente como
@
:
@x
@
(Reconhecendo um vetor)
Dos resultados acima temos
0
a0 b =
1
a
b
onde
1
1
=
=
com isso,
0
a0 b = a
b =a b :
O ponto importante neste desenvolvimento é que, se a é um vetor contra-variante e a b é um invariante
(um escalar), então (para manter a invariância), obrigatoriamente, b tem de se transformar como:
b0 =
1
b :
Ou seja:
se a b é um invariante e a é um vetor contra-variante, isso implica que b é um vetor co-variante.
124
Usaremos a propriedade acima para encontrar vetores a partir dos invariantes.
2.23.1
Levantamento e abaixamento de índices
O processo de criar um vetor co-variante a partir de um contra-variante
b =
b
(59)
é comumente chamado de baixar o índice do vetor. A métrica é, obviamente, uma matriz inversível, se
de…nirmos a inversa da métrica como30
1
=)
=
;
ou seja, uma quantidade com índices em cima, podemos de…nir também o procedimento de criar um vetor
contra-variante a partir de um covariante
b =
b ;
chamamos este processo de levantar o índice do vetor. A de…nição acima é, obviamente, compatível com (59)
b =
b =)
b =
b =)
b =)
b =
b =b :
De forma geral, um tensor
n
T
z }| {
:::
:::
| {z }
m
Com n índices em cima e m índices em baixo é chamado um tensor n vezes contra-variante e m vezes covariante. Para qualquer vetor deste tipo podemos baixar e levantar qualquer um de seus índices mudando o
seu tipo
::
T :::
::: = T
::: ;
obviamente neste processo o número n + m continuará sempre o mesmo. Observe que, geralmente
T
6= T
portanto
T
=T
6= T
=
T
:
Com isso é necessário marcar a posição exata do índice que foi baixado ou levantado.
Remark 66 Para um 4-vetor baixar e levantar os índices signi…ca mudar o sinal da componente zero.
3 0 Observe
que, na representação matricial
1
= .
125
3
Eletrodinâmica relativística
Vamos tentar agora dar um sentido mais preciso para a a…rmação que “as EM são invariantes por TL”.
3.1
@i E i
=
@i B i
=
r
E =
r
B
1
"0
0
@B
@t
=
0J
+
0 "0
@E
@t
Conservação da carga
Dos resultados acima vimos que se a:b é um invariante e a é um vetor, então b é também um vetor. Vamos ver
como este resultado pode ser usado para “descobrirmos”quando um conjunto ordenado de quatro quantidades
forma (ou não) um vetor.
A conservação da carga elétrica pode ser expressa como:
r:J =
@
@
=) r:J +
=0
@t
@t
Esta equação pode ser escrita como
r:J +
@
@t
Ji
=
=
@J i
@
+
=0
@xi
@t
(Jx ; Jy ; Jz )
Podemos ainda escrever
@J i
@
@J i
@
@J i
@
@J
+
=
+c
=
+ c 0 =)
=0
i
i
@x
@t
@x
@ct
@xi
@x
@x
onde
J = (c ; J) :
Tudo que …zemos até aqui foi mudar a notação. Não há ainda nenhuma razão para a…rmarmos que J
é um 4-vetor. Para isso precisaríamos estudar a sua lei de transformação. Entretanto, o fato da carga se
conservar é um efeito físico que não pode depender do observador. Assim, se a equação acima é válida num
certo sistema de coordenadas, pelo postulado da relatividade temos que, num sistema S0:
@J 0i
@ 0
@J 0
+ 0 = 0 =)
=0
0i
@x
@t
@x0
126
Ou seja, a quantidade
@J
= @ J = @0 J 0
@x
(60)
é um invariante. Além disso, pelo que foi dito anteriormente, sabemos que
@0 =
1
@
é um vetor co-variante. Isso signi…ca que, a única forma da igualdade (60) ser válida para qualquer referencial inercial, i.e., qualquer TL é que J se transforme como:
J =
J
Ou seja, J se transforma como um vetor cotra-variante e, portanto, J é um vetor contra-variante.
Encontramos assim o nosso primeiro 4-vetor do eletromagnetismo.
3.1.1
Transformação das densidades
Suponha que num referencial S0 existe um corpo, com uma densidade de carga estacionária 0 (imagine,
por exemplo, um gás carregado que preenche todo o espaço). Ou seja, neste referencial temos uma densidade
de carga 0 e uma densidade de corrente J = 0,
J0 = (c 0 ; 0) :
Se visto por um referencial que se move com
Visto deste referencial o corpo se contrai na
densidade será
Q
Q
=
=
=
V
V0 =
velocidade v = v0 x
^, qual será o valor das novas densidades?
direção do movimento por um fator 0 . Assim, a sua nova
Q
=
V0
0 0
;
0
=
v02
c2
1
1=2
Onde usamos o fato de que a carga se conserva. Além disso, neste referencial S, as cargas estão em
movimento, de sorte que será também observada uma densidade de corrente
Jx =
onde o sinal de
0 v0
=
0 0c
vem do fato das cargas irem na direção
J =(
0c 0;
;
0
=
v0
c
x
^. Assim, em S temos
0 0 c 0 ; 0; 0)
:
Suponha agora que este mesmo sistema é visto de um referencial S0 que se move com uma velocidade
v = v^
x em relação a S (e não a S0 ). Qual o valor da densidade 0 de carga em S0? A princípio poderíamos
127
esperar que, uma vez que S0 vê as distâncias de S contraídas por um fator
0 ?
=
=
(
0 0)
=
0 0
0
a nova densidade seria
:
(61)
Porem isso não é verdade!
Vamos rever o problema usando o fato de J ser um 4-vetor. Sabemos com isso que, ao passarmos de S0
para S temos:
v
0
S:
S0 !
J=
0
0
B
B
(v) J0 = B
B
@
0
0
1
;
0 0
0
0
0
0
1=2
0
=
0
c
0
=
Ou seja, a densidade de carga em S vale =
com o resultado obtido anteriormente.
Se passarmos agora de S para S0 temos
0
0
1
0
0
0
0
1
v0
c
0 0
10
c
0
1
0
0c 0
C B
CB
CB 0 C B
C B
CB
CB 0 C = B
A @
A@
0
0 0c 0
0
0
1
C
C
C
C
A
(62)
e a densidade de corrente Jx =
0 0c 0,
o que concorda
v
S ! S0 :
0
J =
0
B
B
(v ) J = B
B
@
0
0
0
1=2
=
1
c
;
=
0 0
0 0
1 0
0 1
0
0
v
c
10
CB
CB
CB
CB
A@
0c 0
0 0c 0
0
0
1
0
C B
C B
C=B
C B
A @
0
(1 +
0( +
0
0
0) c 0
0) c 0
1
C
C
C
C
A
Ou seja, a densidade de carga medida no referencial S0 vale
0
=
0
(1 +
0) c 0
6=
0 0
:
(63)
O que não concorda com (65). Mais precisamente, a expressão (63) é a formula correta para a densidade
de carga medida em S0. O fato de J ser um 4-vetor nos diz que a transformação desta quantidade (assim como
nas coordenadas) envolve a mistura das quantidades “espaciais” e “temporais”, de sorte que a densidade
de carga depende também das correntes.
128
Em relação à densidade de carga medida em S os valores em S0 assumem a forma
0
B
B
J =B
B
@
0
(1 +
( +
0) c ( 0 0)
0) c ( 0 0)
0
0
1
0
(1 +
( +
0
0
C B
C B
C=B
C B
A @
0) c
0) c
1
0
C B
C B
C=B
C B
A @
0
1 + vv
c2 c
(v + v0 )
0
0
1
C
C
C :
C
A
(64)
O fato de observadores em referenciais diferentes observarem correntes e densidades diferentes nos diz que
a intensidade dos campos gerados por estas quantidades também irão mudar. No exemplo acima, em S0 ,
onde as cargas estão paradas, existe apenas um campo elétrico. Enquanto em S existe além de um campo
elétrico um campo magnético. Obviamente esta mudança tem de ocorres de forma que todos os observadores
concordem em descrever o movimento das cargas.
Um ponto importante a se notar é que as expressões acima são válidas para volumes. Se você estiver
trabalhando com densidades super…ciais ou lineares deve tomar cuidado. Por exemplo, se no exemplo acima
temos, no lugar de um corpo, i …o na direção x com densidade linear 0 , obviamente este …o irá se contrair
e a densidade vista em S vale
= 0 0
O que concorda com os resultados anteriores. Agora, se este …o estiver numa direção perpendicular ao
movimento (e.g., ^
z) você não deve esperar nenhuma modi…cação no …o (que possui bitola nula) e,
consequentemente, os resultados acima não valerão. O ponto aqui é que um …o, ou uma placa, é uma
abstração, pois, en…m, todos os objetos têm na verdade 3D espaciais. Com isso, no caso do …o na direção z^,
passando pela origem, você deve imaginar uma densidade volumétrica
(x; y; z) = f (x) (x) (y)
onde
é a distribuição delta de Dirac. Por TL com velocidades nos eixo x; y; z teremos
0
z
(x; y; z)
= f 0 (x) (x) (y) =)
0
x
(x; y; z)
= f (x)
0
y
(x; y; z)
0
(x) (y) =)
= f (x) (x)
0
(y) =)
0
z
=
zf
0
x
=
0
;
0
y
=
0
:
(x) ;
Pois 0 (x) = x (x) = (x). Apesar de um pouco arti…cial, este resultado pode ajudá-lo a aplicar corretamente as expressões no caso de densidades com dimensão menor que 3:
3.2
Transformação dos campos
Será que os campos elétricos e magnéticos são também a parte espacial de 4-vetores? Vamos tratar o exemplo
especí…co de duas placas paralelas (no plano x; z). Num certo referencial S as placas estão no plano x; z, se
129
movem com velocidade v0 ( x
^) e tem densidade de carga e
(observe que esta não é a densidade medida
as placas estão em repouso). Assim, para este referencial, temos um campo elétrico e outro magnético. Pela
lei de Gauss sabemos que o campo entre as placas vale:
O:E =
E+
=
Z
1
=)
"0
2"0
E:da =
y
^; E =
Q
Q
Q
=) 2E+ :a =
=) E+ =
=
"0
"0
2"0 a
2"0
2"0
( y
^) =) E =
"0
y
^
Para o campo magnético usamos a lei de Ampère:
r
Z
@E
= 0 J =) B dl = 0 I
@t
1
1
1 I
=
Jx =) B+ =
0 I =) B =
2 0l
2 0
2
B =
B: (2l)
0J +
=
0 "0
0
v
onde a corrente densidade de corrente Jx vale (62)
Jx =
0c 0 0
=
0c
=
v0
c =
c
v0
1
2
v0 (^
z)
com isso
B+
=
1
2
B =
0
v0 ( ^
z) ; B =
0
v0^
z
0
resumindo
E =
(0; Ey ; 0) ; Ey =
=
(0; 0; Bz ) ; Bz =
B
"0
0
v0
(65)
Como …cam estes campos quando o mesmo sistema é observado por um referencial S0 que se move v em
relação a S? Como vimos anteriormente, as densidades medidas no referencial S0 valem (64):
0
=
Jx0
=
=
vv0
c2
(v + v0 )
1=2
v
1
2
c
1+
Onde v é a velocidade do referencial S0 em relação a S e v0 a velocidade das cargas vista de S (ou seja, a
130
velocidade de S em relação a S0 onde as cargas estão paradas).
Onde estamos usando o fato de que a carga se conserva. Além disso, a velocidade das cargas vistas por
0
S (18). Com isso, pelo mesmo procedimento acima, em S0 temos o campo elétrico:
E0
E0
=
=
0
y
^ =) E0 =
"0
(0; Ey ; 0)
1+
vv0
c2
"0
y
^=
"0
+
0
Usando
0 "0
1 (
=
0
c2
v0 ) v
"0
y
^=
Ey
1 Bz v
2
0 "0 c
y
^
1
c2
temos
Ey0 =
(Ey
Bz v)
E para o magnético
B0 =
0
z
0 Jx ^
Onde Jx0 é a densidade de corrente medida em S0, de (64) temos
Jx0 =
(v + v0 )
Com isso
Bz0 =
0
0 Jx
=
0
(v + v0 )
=
1
"0
"0
0v
(
Bz
=
Bz
0
v0 )
usando (65)
Bz0 =
(Ey "0
0v
Bz ) =
Ey
v
c2
Ey
v
c2
:
Ou seja, os nossos campos se transformam como
Ey0
=
(Ey
Bz0
=
Bz
Bz v)
v
Ey
c2
Para obter as outras componentes dos campos nós apenas giramos as planas e as colocamos no plano x; y
com isso, repetindo as contas anteriores
Ez0
=
By0
=
(Ez + vBy )
v
B y + 2 Ez
c
Exercise 67 Obtenha as expressões acima resolvendo o problema com as placas no plano x; y.
131
Para a componente x do capo elétrico, basta veri…car que, se você colocar as placas no plano y; z conforme
o sistema se move não ocorre nenhuma alteração na densidade de cargas, de sorte que
Ex0 = Ex :
Neste caso os campos magnéticos se cancelam e nada podemos falar sobre ele. Assim, para analisar as
componentes do campo magnético nas outras direções precisamos de um outro dispositivo. Imagine um
longo solenóide alinhado com o eixo x, com n espiras por unidade de comprimento, por onde passa uma
corrente I (o solenóide está em repouso em S mas existe uma corrente no …o). No interior do solenóide temos
um campo
Bx = 0 nI
Num sistema S 0 que se move na direção x com velocidade v temos
n0 = n :
Além disso (como a carga se conserva e Q0 = Q e o tempo se dilata)
I0 =
dQ
1 dQ
I
dQ
=
=
=
dt0
dt
dt
temos
Bx0 =
0n
0 0
I = Bx
Ou seja, o campo magnético na direção perpendicular ao movimento também não muda.
Coletando nossos resultados temos
Ex0
= Ex ; Ey0 =
Bx0
= Bx ; By0 =
vBz ) ; Ez0 = (Ez + vBy ) ;
v
v
Bz
Ey
By + 2 Ez ; Bz0 =
c
c2
(Ey
:
(66)
Dos resultados acima vemos que os campos não se transformam como a parte espacial de um
4-vetor, ou seja,
E 0i 6=
Ei0
i
E ;
1
6=
i
E :
Independente do que chamamos de E 0 e B 0 .
Exercise 68 Mostrar que: Se B = 0 em S, então
B0 =
1
(v
c2
132
E0 ) :
Se E = 0 em S, então
E0 = (v
B0 ) :
Em especial, Para uma carga que se me com velocidade v???
133
3.3
Tensor do campo eletromagnético
Recapitulando o que sabemos até agora sobre o eletromagnetismo é:
1. A densidade de carga e corrente, juntas formam um 4-vetor:
J = (c ; J) ;
que respeita a lei de conservação de carga
@ J =0:
2. Por uma TL os campos elétricos e magnéticos se transformam como (66):
Ex0
= Ex ; Ey0 =
Bx0
= Bx ; By0 =
vBz ) ; Ez0 = (Ez + vBy ) ;
v
v
Bz
Ey
By + 2 Ez ; Bz0 =
c
c2
(Ey
:
Como vimos dos resultados da seção anterior, certamente os campos E e B não se comportam como
a parte espacial de um 4-vetor. Mais ainda, suas componentes se misturam por uma TL. É importante
salientar que o que vamos fazer aqui é completamente diferente do que …zemos com a mecânica Newtoniana.
A mecânica Newtoniana (ou a clássica) estava errada e teve de ser corrigida para incorporar os efeitos
da TR. Entretanto, o eletromagnetismo já é uma teoria correta, pois foi dele que efetivamente surgiu
a TRR. Destarte, o que vamos fazer aqui não é corrigir o eletromagnetismo, mas simplesmente reescrevê-lo
com o ferramental da TRR, ou seja, usando 4-vetores e 4-tensores (que chamaremos apenas de vetores e
tensores). Chamamos a isso obter a forma covariante das equações (no sentido de que ela terá a mesma
forma em qualquer referencial inercial). Na verdade, as EM são válidas em qualquer referencial inercial, mas
não têm a mesma forma, pois os campos e as densidades se misturam. Por exemplo, enquanto num referencial
podemos ter apenas campos elétricos e cargas, de sorte que EM tem a forma:
@i E i =
r
E=
1
"0
; @i B i = 0 ;
0;
@E
=0:
@t
Num outro referencial S 0 o mesmo sistema pode apresentar densidades de cargas e correntes e as EM
teriam a forma:
@i E 0i =
r0
E0 =
1
; @i B 0i = 0 ;
"0
@B0
; r 0 B0 =
@t0
134
0J
0
+
0 "0
@E0
:
@t0
Neste sentido, as equações não têm a mesma forma. Já uma equação na forma covariante, como a conservação
de carga, tem a mesma forma em qualquer referencial inercial
@ J = 0 ! @0 J 0 = 0 :
Como vimos antes, a descrição das leis físicas no espaço de Minkowski não se limita a vetores e escalar.
Temos a nossa disposição também os tensores. Lembre-se que por uma TL um tensor T
se transforma
como:
T0 =
T
:
(67)
Ou seja, as suas componentes se misturam, assim como nossos campos.
Além disso, da eletrodinâmica sabemos que toda a informação dos efeitos eletromagnéticos está na carga,
corrente (que sabemos formar um 4-vetor) e nos campos E, B. Estas últimas quantidade possuem 6 componentes. Desta forma, nas EM já vigoram todas as quantidades necessárias: cargas, correntes e os campos
E e B. Ou seja, não precisamos procurar por novas quantidades como E 0 e B 0 . Mais ainda, a
quantidade associada aos campos deve ter 6 componentes apenas.
Nossa próxima tentativa é, então, tentar associar E e B com um tensor que tenha 6 componentes.
Exercise 69 Que tensor possui 6 componentes?
Neste ponto vamos tomar um rumo completamente diferente do seguido nos livros, mais que possui a
grande vantagem de produzir expressões que possamos facilmente lembrar e usar.
Os campos elétricos e magnéticos podem ser escritos através dos chamados potenciais escalar e vetor
A:
@A
;
B=r A; E= r
@t
Vamos reescrever estas expressões na forma
Ei
=
@i
= c [@i (
A0
=
@Ai
@Ai
= @i
c 0
@t
@x
=c) @0 Ai ] = c (@i A0
c
e
B1
= @2 A3
@3 A2
B2
= @3 A1
@1 A3
B3
= @1 A2
@2 A1
135
@0 Ai )
Resumindo
Bi = @j Ak
Ei
= @i A0
c
@k Aj (1 ! 2 ! 3)
@0 Ai ; A0 =
c
Ou seja, toda as componentes do campo elétrico e magnético dependem das quantidades:
@ A
@ A
F
onde
Ei
= @i A0
c
Bi = @j Ak
@0 Ai = Fi0 ;
@k Aj = Fjk (1 ! 2 ! 3) :
É muito inconveniente temos sempre que lembrar a ordem (1 ! 2 ! 3).
Além disso, pela sua de…nição é óbvio que F é anti-simétrico:
F
=
F
; F
=0
Ou seja, possui apenas 6 componentes:
F
0
B
B
=B
B
@
0
F10
F20
F30
F01
0
F21
F31
F02
F12
0
F32
F03
F13
F23
0
1
0
C B
C B
C=B
C B
A @
0
E1
c
E2
c
E3
c
E1
c
E2
c
E3
c
0
B3
B2
B3
0
B1
B2
B1
0
1
C
C
C
C
A
Tudo que …zemos até agora foi inventar símbolos, mas sem nenhuma física nem prova de que as quantidades
são ou não vetores.
Vamos tentar então responder a seguinte pergunta: Se E e B são os campos vistos num referencial S,
como …cam os campos vistos num referencial S0 que se move com velocidade v na direção x em relação a S?
Se F é um tensor ele deve ser transformar pela lei (67). Observe que esta lei tem o tensor com índices contravariantes. Claro que nós sabemos como se transformam também os vetores co-variantes, mas é interessante
se pudermos usar (67) (e não (58)), simplesmente porque já sabemos a forma de
e não queremos …car
invertendo as coisas. Entretanto, dado um tensor co-variante, sabemos como a regra de abaixamento e
levantamento de índices pode ser usada para obtermos suas componentes contra-variante. Ou seja, se F é
um vetor co-variante podemos formam com ele um tensor contra-variante usando
F
136
=F
Vale agora salientar o seguinte fato: Pela forma da métrica é fácil ver que quando baixamos um índice
“espacial” (1; 2; 3) nada acontece. Entretanto, toda vez que baixamos um índice “temporal” (0) o sinal da
componente muda:
a = a0 ; a1 ; a2 ; a3 =) a =
a = (a0 ; a1 ; a2 ; a3 ) =
a0 ; a1 ; a2 ; a3
O mesmo, obviamente, é válido para os tensores:
i
M0i = M0
M0
; M0i =
i
; M00 = M 00
Onde, no último caso, baixamos dois índices espaciais e ganhamos dois sinais de menos.
Desta forma temos
F
0
B
B
=B
B
@
0
F10
F20
F30
F01
0
F21
F31
F02
F12
0
F32
Podemos agora usar a matriz
= F 001 =
1
=
=
=
=
=
E10
c
=
0
1
F0
=
1F
10
F
+
1
2
(
)
2
2
i
0
0
0 0
0 0
1 0
0 1
=
0
1
1
1
0
0
E1
c
E2
c
E3
c
E1
c
E2
c
E3
c
0
B3
B2
B3
0
B1
B2
B1
0
1
C
C
C
C
A
F
1
0
0
2
0
0
0
0
h
B
B
=B
B
@
1
C B
C B
C=B
C B
A @
0
para calcular
E10
c
F03
F13
F23
0
0
1
0
0
0F
1
01
F 10
F 10
1 F 10
F 10 = F 01
E1
=) E10 = E1 =) Ex0 = Ex
c
137
0F
0
+
1
1F
1
1
C
C
C
C
A
Para a componente 2 do campo elétrico
E20
c
= F 002 =
2
=
=
E20
=
0
0
0F
2
c
2
02
F
+
=
0
1F
(E2
cB3 )
(E2
cB3 ) =) Ey0 =
0
2
(Ey
vBz )
2F
2
12
Da mesma forma, para as outras componentes temos
Ez0
=
Bx0
= Bx ; By0 =
(Ez + vBy ) ;
v
Ey
c2
By +
; Bz0 =
Bz
v
Ey
c2
:
O que concorda com o resultado obtido anteriormente (66). Ou seja, nós obtemos as transformações dos
campos previstas pelas EM e pelas TL se agruparmos os campos elétricos e magnéticos na quantidade
F
0
B
B
=B
B
@
0
E1
c
E2
c
E3
c
E1
c
E2
c
E3
c
0
B3
B2
B3
0
B1
B2
B1
0
1
C
C
C
C
A
e exigirmos que esta quantidade se transforme como um tensor. Este procedimento é completamente
análogo a identi…carmos
F
A
onde
= @ A
=
c
@ A
;A
=) A =
c
;A
e A são os potenciais escalar e vetor. E, além disso, exigirmos que A se transforme como um vetor
A0 =
A :
Desta forma, podemos facilmente obter o campo sentido pelos mais diversos observadores. Além disso,
o fato do campo de F ser realmente um tensor pode ser veri…cado tanto pela compatibilidade entre a sua
transformação e as transformações previstas pelas EM (como …zemos), quanto experimentalmente (medindo
os campos com sensores parados ou em movimento).
138
3.4
Invariância de gauge
Partindo das expressões
B
= r
A ; Bi = "ijk @j Ak
@A
r
; Ei = (@i + @0 Ai )
@t
E =
e fazendo a transformação
A~i
~
para uma função
= Ai + @i ) Ai = A~i
=
@i
= ~ + @0
@0 )
qualquer, temos
"ijk @j Ak
= "ijk @j A~k
@k
= "ijk @j A~k
(@i + @0 Ai )
= @i ~ + @0
+ @0 A~i
@i
"ijk @j @k = "ijk @j A~k
= @i ~ + @0 A~i
ou seja, podemos de…nir
Bi
= "ijk @j A~k
Ei
=
@i ~ + @0 A~i
usando tanto os potenciais originais como os transformados. Esta liberdade na escolha dos potenciais (na
escolha de ) é chamada de liberdade de gauge (ou invariância de gauge). Esta liberdade re‡ete o fato de
que (em EM) os potenciais são apenas um artifício matemático e não tem uma realidade física, apenas os
campos têm uma realidade física.
Esta invariância é a motivação principal para “chutar” a forma do tensor de campo. Observando que
~
c
=
c
+ @0 ) A0 = A~0
@0
podemos escrever a nossa transformação de gauge como
A = A~
139
@
(68)
por esta transformação o tensor do campo eletromagnético se transforma como
F
= @ A
@ A =@
= @ A~
@ @
= @ A~
@ A~
A~
@
@
A~
@
@ A~ + @ @
Ou seja, esta transformação não altera F e, conseqüentemente, não altera os campos. Pela expressão acima é
trivial ver que a transformação (68) não altera F . Assim, a forma de F , i.e., a relação de F com os potenciais,
pode ser buscada como uma combinação de primeiras derivadas dos potenciais (pois os campos são derivadas
dos potencias) que são invariantes por uma transformação de gauge. A forma acima é a mais simples e a
única.
4
As equações de Maxwell
Temos então a nossa disposição duas quantidades com caráter tensorial:
1. J = ( c; J), obtido através da lei de conservação de carga;
2. F
=@ A
@ A , obtido através dos campos expresso pelo 4-vetor potencial A = (
=c; A).
O que nos fornecer todas as 10 quantidades (4+6) presentes nas equações de Maxwell (EM). Nosso objetivo
agora é reescrever as EM usando o tensor do campo eletromagnético. Com isso, as expressões obtidas usarão
apenas tensores e valerão (terão a mesma forma, i.e., serão co-variante) para qualquer referencial inercial
(ligados por TL). Para isso, primeiro vamos dividir as EM em dois pares. As primeiras duas equações:
r
E =
r B =
@B
@B
=) r E +
= 0 (Lei da indução de Faraday),
@t
@t
0 (Não existem monopolos magnéticos),
são chamadas de equações homogêneas. Pois, colocando todos os campos do lado esquerdo, elas são iguais a
zero. Este par de equações não envolve cargas e correntes e apenas dita como os campos se relacionam.
Este fato está re‡etido na própria estrutura do tensor do campo. Ou seja, tudo que precisamos para descrever
estas equações está no tensor do campo eletromagnético.
Usando diretamente a de…nição do tensor do campo eletromagnético (TCE)
F
= @ Av
140
@ A ;
vemos facilmente que
@ F
+@ F
@ (@ Av
+@ F
=
@ A ) + @ (@ A
@ A ) + @ (@ A
@ A )=
@ @ Av
@ @ A +@ @ A
@ @ A +@ @ A
@ @ A =
@ @ Av
@ @ A +@ @ A
@ @ A +@ @ A
@ @ A =
(@ @
@ @ ) A + (@ @
usando
@ @ =
@ @ ) A + (@ @
@ @ )A
@2
@2
=
=@ @
@x @x
@x @x
temos
@ F
+@ F
+@ F
=0
(69)
Se dois índices são iguais a expressão acima não nos diz nada. Por exemplo, para
(@ @
= :
@ @ ) A + (@ @
@ @ ) A + (@ @
@ @ )A
=
0
(@ @
@ @ ) A + (@ @
@ @ )A
=
0
@ @ ) + (@ @
@ @ )] A
=
0
[(@ @
Precisamos então apenas analisar os termos com índices diferentes. Analisemos uma componente desta
igualdade, por exemplo, = 0; = i; = j:
@0 Fij + @i Fj0 + @j F0i
1
Ei
Ej
@0 Fij +
@j
@i
c
c
c
1
E2
E1
@0 F12 +
@1
@2
c
c
c
1
E3
E1
@1
@3
@0 F13 +
c
c
c
1
E1
E2
@0 F21 +
@2
@1
c
c
c
=
0
=
0
=
0 =) @0 B3 +
=
=
1
[r E]3 = 0
c
1
0 =) @0 ( B2 ) + ( [r E]2 ) = 0
c
1
0 =) @0 ( B1 ) + [( [r E]1 )] = 0
c
Agrupando os resultados acima temos
1
[r
c
E] =
@
B =) r
@ct
141
E=
@B
@t
Fazendo
= 1;
= 2;
=3
@1 F23 + @2 F31 + @3 F12
=
0
@1 B1 + @2 B2 + @3 B3
=
0
Que pode ser escrita como
r:B = 0
Exercise 70 Veri…que que as outras componentes da expressão (69) dão identidades, ou as mesmas equações
que as obtidas acima.
Remark 71 Assim, o par de equações de Maxwell chamado de homogêneo está contido na equação (69), a
qual, por sua vez, é uma conseqüência da de…nição do tensor do campo eletromagnético através do potencial.
Partamos agora para as EM não homogêneas, i.e., aquelas que relacionam as cargas, e seu movimento,
com os campos
r E=
r
B=
"0
(Lei de Gauss)
0J
+
0 "0
@E
(Lei de Ampère + corrente de deslocamento)
@t
Usando a notação introduzida anteriormente, podemos escrever a primeira das equações acima como
r E=
"0
= c@i
usando
"0
0
=
c
J0
Ei
=
=) @i F 0i = 2
c
c"0
c "0
1
=)
c2
0
=
1
"0 c2
temos
r E=
"0
=) @i F 0i =
0J
0
Se usarmos agora o fato de F 00 = 0 podemos ainda escrever
@0 F 00 = 0 + @i F 0i =
0J
0
ou seja
@0 F 00 + @i F 0i
@ F0
142
=
0J
0
=
0J
0
(70)
Já para a segunda equação temos
r
B=
+
0J
0 "0
@E
@t
@E3
@t
@E3
2
1
@1 B
@2 B = 0 J3 + 0 "0
=) @1 F 31
@t
@ E3
@1 F 31 + @2 F 32 = 0 J3 + 0 "0 c2 c
@ct
(r
B)3 =
0 J3
+
0 "0
F 32 =
@2
0 J3
+
0 "0
@E3
@t
Usando o fato de F 33 = 0 podemos escrever esta última equação como
@1 F 31 + @2 F 32 + @3 F 33 = 0 =
0J
3
+ @0 F 03
Usando a anti-simetria de F 03
@1 F 31 + @2 F 32 + @3 F 33 =
0J
3
@0 F 30
@0 F 30 + @1 F 31 + @2 F 32 + @3 F 33 =
0J
3
que pode ser escrita como
@ F3 =
0J
3
Da mesma forma
(r
B)2
=
(r
B)1
=
@E2
=) @ F 2 =
@t
@E1
=) @ F 1 =
0 J 1 + 0 "0
@t
0 J2
+
0 "0
0J
2
0J
1
ou seja
@ Fi =
0J
i
Usando agora a equação (70) obtida anteriormente, temos o seguinte par de equações
@ F0 =
0J
0
; @ Fi =
0J
i
Ou seja, o par de equações não homogêneas de Maxwell pode ser escrito como
@ F
=
0J
(71)
Assim, das quatro equações de Maxwell duas são uma conseqüência direta da nossa de…nição do tensor do
campo eletromagnético através do potencial vetor (quadri-vetor) e as outras duas tem a forma obtida acima.
143
Em outras palavras ainda, as quatro equações de Maxwell podem ser escritas com o seguinte par de equações
covariante:
F
=@ A
@ F
=
@ A ;
0J
;
(72)
onde
A
4.1
c
;A
:
Outra aproximação
Alguns livros preferem um rumo um pouco diferente. Vejamos como as nossas idéias podem ser compatibilizadas com as destes livros. Observe que a equação (69)
@ F
+@ F
+@ F
=0
(73)
também pode ser escrita como
1
"
2
onde "
@ F
=0
(74)
é o tensor de Levi-Civita em 4-D. Por exemplo, peguemos a (69) para
= 1;
= 2;
=3
@1 F23 + @2 F31 + @3 F12 = 0
Agora, se tomarmos a (74) para
"0
@ F
= 0 temos
= "0123 @1 F23 + "0132 @1 F32 + "0312 @3 F12 + "0321 @3 F21 + "0213 @2 F13 + "0231 @2 F31
= @1 F23
@1 F32 + @3 F12
@3 F21
@2 F13 + @2 F31
= @1 F23 + @1 F23 + @3 F12 + @3 F12 + @2 F31 + @2 F31
=
2 (@1 F23 + @3 F12 + @2 F31 ) = 0
ou seja
1 0
"
2
@ F
= @1 F23 + @3 F12 + @2 F31 = 0
o mesmo vale para as demais componentes de em (74), ou seja, cada componente de em (74) representa
uma escolha dos índices ; ; em (73). Ademais, a equação (74) pode ainda ser escrita como
"
@ F
= 0 =) @
1
"
2
144
F
=@ G
=0
onde
G
=
1
"
2
F
é chamado de dual do tensor do campo eletromagnético.
Exercise 72 Obtenha a forma matricial do tensor dual G .
Com isto, os textos que seguem esta rota, não partem da de…nição do tensor do campo eletromagnético
através do potencial vetor, mas, ao invés disso, partem da de…nição de F diretamente através dos campos
elétricos e magnéticos (obtido pelas leis de transformação do campo)
F
0
B
B
=B
B
@
1
0
E1
c
E2
c
E3
c
E1
c
E2
c
E3
c
0
B3
B2
B3
0
B1
B2
B1
0
; @ G
=0:
C
C
C ;
C
A
em seguida de…nem o dual deste tensor.
Nesta aproximação as EM possuem a seguinte forma
@ F
=
0J
Onde a primeira, que corresponde as equações inhomogênea, é igual a do nosso desenvolvimento e a segunda
corresponde ao par de equações homogêneas. Obviamente os dois desenvolvimentos são completamente
equivalentes. Ou seja, pra nós as quatro equações de Maxwell se reduzem ao par
F
=@ A
@ A ; @ F
=
0J
;
onde
A
c
;A
ou ao par
@ F
=0; @ G
=0;
onde
0
F
G
=
B
B
B
B
@
1
"
2
0
E1
c
E2
c
E3
c
E1
c
E2
c
E3
c
0
B3
B2
B3
0
B1
B2
B1
0
F
145
:
1
C
C
C
C
A
4.2
Ainda sobre as equações não-homogêneas
Na verdade, o par de equações não-homogêneas pode ser considerado também como uma conseqüência da
anti-simetria do tensor do campo eletromagnético. Pois, devido a esta anti-simetria:
@ @ F
=0
ou seja
@ (@ F
) = 0 =) @ C = 0; C = @ F
(75)
Assim, o vetor C , como conseqüência da anti-simetria de F , é uma quantidade com quadri-divergência
nula. Estas quantidades são chamadas de correntes conservadas. Obviamente precisamos saber que vetor
é este. Pelo desenvolvimento anterior já sabemos quem é C, mas, se começássemos pelo caminho atual,
teríamos a indicação de que C está relacionada a uma quantidade conservada (neste caso a carga).
Para obter explicitamente esta quantidade podemos seguir o caminho inverso ao seguido anteriormente,
ou seja, escrevemos cada uma das componentes de C e comparamos com as EM.
Para a componente = 0 temos
C0
= @ F 0 = @0 F 00 + @1 F 01 + @2 F 02 + @3 F 03
= @1 F 01 + @2 F 02 + @3 F 03
E1
E2
= @1
+ @2
+ @3
c
c
1
r E
=
c
E3
c
Usando agora a lei de Gauss temos
r E=
Para as demais componentes
C1
"0
=) C 0 =
1
1
1 c
r E=
= 2
=
c
c "0
c "0
0J
0
= 1 temos
= @ F 1 = @0 F 10 + @1 F 11 + @2 F 12 + @3 F 13
E1
= @0
+ @2 (B3 ) + @3 ( B2 )
c
1
=
@0 E1 + @2 B3 @3 B2
c
1
=
@0 E1 + "1jk @j Bk
c
146
No caso geral de uma componente espacial
Ci
=i
1
@0 Ei + "ijk @j Bk
c
1 @Ei
+ "ijk @j Bk
c @x0
1 @Ei
+ "ijk @j Bk
c2 @t
@Ei
+ "ijk @j Bk
0 "0
@t
=
=
=
=
Usando agora a lei de Ampere-Maxwell
r
0 "0
B
@E
=
@t
0J
=)
0 Ji
=
=
0J
0 "0
@Ei
+ "ijk @j Bk
@t
temos
Ci =
0 Ji
i
:
Coletando nossos resultados
C0 =
0J
0
; Ci =
0J
i
=) C =
0J
Voltando na equação (75)
C =@ F
=) @ F
=
0J
como já havíamos obtido. Observe também a anti-simetria de F tem por consequência a conservação da
carga
@ @ F = 0 =) @ C = 0 =) @ J = 0 :
4.3
Invariantes do campo eletromagnético
Sendo F
eG
tensores, podemos formar com eles dois invariantes
1
2
jEj
c2
2
F
F
=
2 jBj
F
G
=
1
"
2
F
F
=
;
4
(E B) :
c
Exercise 73 Usando a forma explicita do tensor do campo eletromagnético, obtenha as expressões acima.
Ou seja, estas quantidades possuem o mesmo valor em qualquer sistema de coordenadas.
Em especial, se para um certo observador E e B forem ortogonais (E B = 0) (como no caso das ondas
eletromagnéticas no vácuo) estes campos serão ortogonais para qualquer observador. Além disso, se para
algum observador jEj = c jBj esta igualdade será mantida em todos os referenciais. Através de uma escolha
147
dos referenciais podemos encontrar campos E e B que tenham qualquer valor desejado, respeitando apenas
o valor dos invariantes acima.
Exercise 74 Num dado referencial S os campos elétricos e magnéticos possuem os valores E e B. Para um
outro observador, num referencial S0, estes campos são paralelos. Escreva o valor dos campos E0 e B0 do
referencial S0 em relação aos campos E e B do referencial S.
4.4
Gauge de Lorentz
Um resultado do cálculo vetorial conhecido como teorema de Helmholtz (ou teorema fundamental do cálculo
vetorial) a…rma todo campo vetorial (bem comportado), em três dimensões, que vá a zero no in…nito, pode
ser decomposto num vetor irrotacional e outro solenoidal (divergência nula). Em outras palavras, este campo
pode ser decomposto no rotacional de outro campo e no gradiente de uma função escalar
V=r
M + rf
Este resultado pode ser usado para explorarmos a liberdade de gauge do eletromagnetismo. Lembrando que
esta liberdade a…rma que, dado um potencial escalar e um vetor A ligados a uma certa con…guração dos
campos elétricos e magnéticos, qualquer outro potencial na forma
A~
= A +@
A~0
= A0 + @0 ) ~ =
A~i
@t
~ =A+r
= Ai + @i ) A
descreverá os mesmo campos e, conseqüentemente, a mesma física. Se usarmos agora o teorema de Helmholtz
para escrever
A = r M + rf
teremos
~ =r
A
~ =r
M + rf + r ) A
M + r (f + )
Calculando o divergente desta quantidade temos
~ = r: (r
r:A
M) + r:r (f + ) = r2 (f + )
~ Além disso,
Assim, escolhendo a função
= f podemos eliminar completamente a divergência de A.
escolhendo adequadamente a função podemos modi…car arbitrariamente o divergente do potencial vetor,
uma vez que este só depende do laplaciano da função (f + ) acima. Com isso, uma conseqüência direta da
invariância de gauge é que podemos escolher arbitrariamente o gradiente do potencial vetor sem
alterar os campos e, conseqüentemente, sem alterar a física do problema.
148
Esta liberdade é usada para simpli…car a forma das equações obtidas quando usamos os potenciais diretamente nas EM. Substituindo as expressões
B=r
A ;E =
@A
;
@t
r
nas EM não-homogêneas temos
r2 +
r2 A
@
r:A =
@t
"0
@2A
r r:A +
0 "0
@t2
0 "0
@
@t
=
(76)
0J
Podemos assim sair de um conjunto de seis campos indeterminados para um conjunto de quatro. Além disso,
as equações acima podem ser simpli…cadas pela nossa escolha na liberdade de gauge. Por exemplo, se …zemos
r:A = 0
a primeira equação acima se torna
r2 =
"0
;
conhecida como equação de Poisson. Assim a distribuição de carga de um problema está relacionado com
a solução da equação de Poisson para o potencial do campo eletromagnético. A escolha acima signi…ca
que …zemos uma escolha especí…ca da nossa função e, conseguintemente, uma escolha de gauge. Esta em
particular é chamada de gauge de Coulomb.
A substituição do potencial vetor nas equações não-homogêneas é também bem mais simples usando a
equação covariante (tente obter as expressões (76) acima). Neste caso usando
F
=@ A
@ A ; @ F
=
0J
v
temos
@ [@ A
@ A ]=
0J
v
=) @ @ A
@ (@ A ) =
Esta equação pode ser simpli…cada escolhendo
r:A =
1 @
=) @i Ai + @0 A0 = 0 =) @ A = 0
c2 @t
com isso
@ @ A = 4A =
onde
4 = @ @ = r2
149
0J
v
1 @2
c2 @t2
0J
v
é o operador d’Alambertiano.
Exercise 75 Mostre que o gauge de Coulomb não é invariante por transformações de Lorentz.
Para manter a escolha do gauge de Coulomb entre diferentes referenciais precisamos de…nir uma transformação diferente para cada referencial. Desta forma a quantidade A não se transforma como um 4-vetor.
5
Força de Lorentz
As EM nos dizem como as cargas e seus movimentos, in‡uenciam, ou criam, os campos eletromagnéticos.
Para …nalizar a teoria do eletromagnetismo, resta-nos ainda dizer como os campos interagem com as cargas,
ou seja, obter a forma covariante da força de Lorentz.
F = qE + qu
Fi
B
= qEi + q"ijk uj Bk
Sabemos que a força não é um 4-vetor (nem um invariante). A disso, no lado direito da equação acima
aparece a velocidade da partícula (que obviamente não é um quadrivetor). Podemos inicialmente corrigir o
problema com a velocidade usando o 4-vetor quadrivelocidade:
=
0
dx
c
= @q
d
1
com isso
Fi = qEi + q"ijk
;q
1
u2
c2
r
1
u2
c2
1
u2
c2
i
1
ui A
Bk
Para a componente x = 1 temos
"
Fx = q cEx +
r
u2
c2
1
2
3
Bz
By
#
usando agora o TCE podemos escrever esta expressão com
F1
"
= q cF10 +
= q
r
1
= q
r
1
r
1
u2
c2
2
c
u2 4
q
c2
1
u2
c2
0
2
u2
c2
F10 +
150
F12 +
F10 +
2
F12 +
3
2
F13
#
F12 +
3
F13
3
3
F13 5
Usando agora que F11 = 0, podemos ainda escrever
F1
= q
F1
= q
r
u2
c2
u2
c2
1
r
1
0
F10 +
1
F11 +
2
3
F12 +
F13
F1
Para as demais componentes temos
Fi = q
r
u2
c2
1
Fi
Fi =) q
u2
c2
1
=q
Fi
No lado esquerdo da expressão acima podemos reconhecer as componentes espaciais da força de Minkowski
K
K
0
1
1
dp
1
=
=@ q
F:u; q
FA
2
2
d
c 1 uc2
1 uc2
1
0
1
1
F:u; q
FA
= @ q
2
2
c 1 uc2
1 uc2
ou seja
Ki = q
Fi
Além disso, se calcularmos
K0
= q
F0
= q
0
=
=
=
=
q
1
F00 +
1 E1
+
c
1
q
q
c 1
1
1
q
c 1
1
1
q
c 1
u2
c2
u2
c2
u2
c2
F01 +
2
2 E2
+
c
(E u)
(qE u)
(F u)
151
F02 +
3 E3
c
3
F03
(77)
Que podemos reconhecer como a componente temporal (zero) da força de Minkowisky em (77). Lembrando
que esta componente se relaciona com a variação do trabalho da carga
0
1
1
K =@ q
c 1
u2
c2
dE
1
;q
dt
1
u2
c2
1
FA
Assim, a força de Lorentz, acrescida da equação para a variação da energia da carga, pode ser escrita de
forma covariante como:
K =q F :
Assim, na RR, todo o eletromagnetismo se resume nas expressões:
A
F
c
@ A
;A
@ A
J = (c ; J) (conservação da carga)
@ F
K =q
=
0J
F
(EM não homogênea)
:(força de Lorentz)
Exercise 76 Considere uma carga em repouso num sistema S 0 onde existe um campo elétrico E0 . Sabendo
que S 0 se move com velocidade v = v^
x com relação ao sistema S, use a lei de transformação de forças e dos
campos para encontrar as forças que agem na carga em S.
6
Noções de relatividade geral
A teoria da Relatividade restrita promoveu uma completa revolução na noção de tempo e espaço, em especial
na concepção geométrica do nosso espaço (uma vez que o tempo ante não fazia parte desta geometria). Uma
nova revolução, talvez ainda mais revolucionária, foi introduzida pela Teoria da Relatividade Geral.
Na mecânica clássica o conceito de massa surge em duas situações independentes. A primeira é a segunda
lei de Newton
F = mi a ;
e a segunda a lei da gravitação de Newton
F=G
M mg
r^ ;
r2
152
onde G é uma constante universal (constante gravitacional ). Ou ainda, se chamarmos de
g (r) = G
M
r^
r2
a intensidade do campo gravitacional sentido pela massa mg no ponto r devido a presença da massa (gravitacional) M , pode ser escrita como
F = mg g
Problem 77 Uma dúvida a se colocar é se as quantidades mi e mg que surgem nas equações acima são as
mesmas.
Suponha que massa inércia e a gravitacional sejam duas características distintas de um corpo (como carga
e massa)31 . Se este corpo cair livremente sob a ação apenas de um campo gravitacional temos que a sua
aceleração será:
mg
F = mi a ; F = mg g ) a =
g
mi
Ou seja, a razão entre a massa gravitacional e a massa inercial será uma constante (universal) apenas se
todos os corpos caírem com a mesma aceleração sob a ação da gravidade. O valor explícito desta
constante é irrelevante, pois ela apenas ajusta a unidade de massa ou o valor numérico de G. Assim, para
as unidades adequadas (ou o valor adequado de G) podemos dizer que apenas se
mg = mi
m;
todos os corpos caem com a mesma aceleração sob a ação do campo gravitacional criado por um outro corpo.
Problem 78 Se você estiver numa nave numa órbita estacionária e jogar uma bolinha de gude, a estátua
da liberdade e a lua, todos cairão com a mesma aceleração na terra?
Observe que a a…rmação acima supõe M >> m de sorte que M não sofre nenhum deslocamento durante o
experimento. A a…rmação adequada é que, visto de um ponto …xo de M todos os corpos caem com a mesma
aceleração. Ou ainda, visto do centro de massa do sistema qualquer corpo lançado contra M fará a mesma
trajetória.
Antes de Galileu a idéia predominante (desde Aristóteles) é que corpos mais pesados caem mais depressa.
Outros experimentos, além dos realizados por Galileu com planos inclinados, comprovaram a igualdade da
massa inercial e gravitacional até uma precisão de 10 12 (até 2008). Mas qualquer diferença pequena nesta
igualdade (ou na constância da razão entre elas) possui conseqüências cruciais em física. De sorte que ainda
hoje experimentos são realizados para comprovar esta igualdade.
A equivalência entre a massa inercial e gravitacional leva a seguinte questão:
3 1 Obviamente
a experiência do cotidiano indica que mi e mg não podem ser muito diferentes.
153
Problem 79 Seria possível para um observador numa nave (sem olhar pra fora) saber se a nave está parada
na superfície da terra (cuja aceleração da gravidade vale g) ou se desloca no universo com aceleração constante
g?
Ou ainda seria possível para este mesmo observador saber, fazendo apenas experimento dentro da nave, se
ele cai sob o efeito do campo gravitacional, ou se vaga livre pelo espaço? Acreditando que a resposta destas
perguntas sejam ambas negativas, Einstein propôs o chamado Princípio da Equivalência:
“we [...] assume the complete physical equivalence of a gravitational …eld and a corresponding acceleration
of the reference system.” (Einstein, 1907)
Em primeiro lugar, este conceito muda (completamente) a noção de um referencial inercial. Pois, se o
observador em queda livre não for capaz de detectar nenhuma força proveniente da sua aceleração (gravitacional) qualquer experimento mecânico será compatível com os resultados de um outro observador num
referencial inercial (no sentido anterior) que não esteja sob a ação de nenhum campo gravitacional. Ou seja,
as leis da mecânica valem não só para os referenciais ligados por TL, mas também para referenciais em
queda livre. Assim, um observador que cai livremente num campo gravitacional também está
num referencial inercial. Dentro destas idéias qualquer “força …ctícia” que surja porque estamos num
referencial não inercial (acelerado) é equivalente, ou pode ser produzida, por um campo gravitacional. Da
mesma forma, um observador que sinta uma força gravitacional (e.g., você parado na superfície da terra) é
equivalente a um referencial acelerado e, conseqüentemente, não inercial.
É importante observar que as a…rmações acima são válidas apenas para experiências realizadas num laboratório “bem pequeno”. Por exemplo, se você esta num container caído sob o efeito do campo gravitacional
da terra o chão do container pode estar mais perto da terra que o teto. Isso signi…ca que, se o container é
grande o su…ciente, a força gravitacional no teto será maior que perto do piso e você será capaz de detectar
uma diferença na aceleração de corpos lançados nestas duas posições. Ou ainda se você colocar um elástico
pendurado no teto do container você irá vê-lo se esticar. Na verdade, se o campo for forte o su…ciente, o
chão do container será puxado com muito mais força que a base e este irá se estilhaçar. Este fenômeno,
que permite a detecção da in‡uência do campo para um sistema em queda livre é chamado efeito de maré.
Assim, quando dizemos que o laboratório em queda livre não sente a ação do campo estamos nos limitando
a laboratório cuja dimensão é muito menor que uma variação apreciável na intensidade do campo.
Além do exposto acima, adotar o princípio da equivalência nos diz que qualquer resultado obtido veri…cado
num referencial acelerado (não-inercial) deve ser esperado também num campo gravitacional. Por exemplo,
imagine um disco que gira (um carrossel) com velocidade constante ! e um observador no centro. Qualquer
pessoa fora do centro sentirá uma força equivalente a uma força gravitacional (é assim que as estações espaciais
simulam gravidade).
Este observador espalhou relógios idênticos pela superfície do disco. Conforme os relógios estão num raio
maior se movem com maior velocidade e, conseqüentemente, se movem mais devagar (para o observador no
centro) devido à dilatação temporal. Entretanto, um relógio numa certa distância R sofre uma aceleração
constante !R2 = g que é equivalente a um campo gravitacional que produza a mesma aceleração. Uma
154
vez que (acreditando no princípio da equivalência) não é possível distinguir entre a ação de um campo
gravitacional e os efeitos de um referencial com uma aceleração constante, devemos esperar que um relógio
num campo gravitacional de intensidade g, quando observado por alguém muito distante (dizemos “fora
da ação do campo”) ande também mais devagar. Voltando para o carrossel, quanto maior a posição R do
relógio, maior a aceleração centrifuga e mais ele irá se atrasar. Voltando para o campo, quanto maior a
intensidade do campo gravitacional maior será também o atraso do relógio. Assim, uma pessoa que esteja
a uma distância R (…nita) de um corpo massivo verá o relógio de outra pessoa que está a uma distância
r < R andar mais devagar. Ou seja, não apenas relógios em movimento, mas também relógios “parados”
(em relação a um observador num referencial inercial fora do alcance do campo) andam mais devagar. Esta
é a in‡uência esperada do campo gravitacional sobre o tempo.
Um outro ponto a ser observado no exemplo acima é sobre a medida de distâncias. Obviamente, como nós
acreditamos na relatividade restrita, o movimento de réguas no disco (medida por alguém no centro) sofrerá
as contrações de Lorentz. Da mesma forma a medida de um comprimento de arco qualquer realizada pelo
observador no centro fornecerá um valor dl0 menor que a medida dl realizada por um observador girando junto
com o arco (ou com o disco parado). Além disso, medidas na direção radial (por estarem perpendicular
ao movimento) fornecerão o mesmo valor para os dois observadores r0 = r. Assim, se P 0 é o perímetro a uma
distância r0 medido pelo observador no centro, quando o disco está girando, e P o perímetro no ponto r (que
é o mesmo que r0 ) medido quando o disco está parado, temos:
P0
P0
P
=
<
:
0
r
r
r
Mais especi…camente, como sabemos que P=r = 2 , temos que a razão entre o perímetro e o raio da circunferência de um disco girante (e, conseqüentemente, de medidas de distância realizadas num campo gravitacional)
não mais respeitam os axiomas de Euclides e suas consequencias. Ou seja, se quisermos trabalhar
com campos gravitacionais, devemos mudar (mais uma vez!) drasticamente a nossa noção de geometria.
Pelo exposto acima, temos que os fenômenos envolvidos no tratamento geométrico de campos gravitacionais devem ser desenvolvidos numa teoria que relaxe os axiomas de Euclides, ou, mais especi…camente,
numa geometria não-euclidiana. As características de uma tal geometria são, por exemplo, que a razão entre
área e perímetro são diferentes de 2 e que a soma dos ângulos internos de u triângulo não são mais 180o .
Observe que o efeito acima pode ser visualizado imaginando um disco côncavo, ou uma tigela. Pois, neste
caso, o perímetro medido não será mais uma rela e, por isso, maior, enquanto a borda do disco continua a
mesma. Assim, uma forma de se visualizar a “não-euclidicidade”do espaço é dizer que este espaço foi curvado.
Mas, obviamente, este conceito só faz sentido se pudermos imaginar um espaço de dimensão maior onde o
nosso prato está inserido. Entretanto, a pessoa no carrossel poder inferir sobre a mudança na geometria sem
fazer qualquer referência a um espaço de dimensão maior. Assim, o que queremos dizer é que os efeitos do
campo gravitacional são equivalentes aos efeitos da curvatura das características geométricas de um plano.
Além disso, como sabemos que tempo e espaço estão ligados, esta curvatura (apesar de equivalente) não
155
pode ser levada ao pé da letra. Quando você ver desenhos de um corpo curvando o espaço-tempo e, por isso,
fazendo outro corpo “cair” sobre ele, lembre-se que uma das coordenadas daquele plano curvado é o tempo,
de sorte que a imagem não é equivalente a um plano espacial.É fácil ver que, levanto em conta os efeitos
da contração de Lorentz, estas características ainda se mantêm para quais observadores em RR. Mais ainda,
estas características estão ligadas com a noção de ângulos e distâncias do nosso espaço e, como vimos, estas
últimas estão ligadas com a métrica M do espaço. Num espaço euclidiano
0
1
B
M (x; y; z) = @ 0
0
0
1
0
1
0
C
0 A
1
Obviamente, por uma transformação nas coordenadas
x = r sin cos
podemos ter
y
= r sin sin
z
= r cos
0
1 0
B
M 0 (r; ; ) = @ 0 r2
0 0
0
0
r2 sin2
1
C
A :
Entretanto, a forma feia da métrica acima não signi…ca que a geometria gerara por ela seja não-euclidiana,
pois nosso espaço continua plano. Mas existe uma única transformação (a transformação inversa) que é a
mesma em qualquer ponto do nosso espaço, que lema a métrica M 0 na forma M . Desta forma, podemos
a…rmar que:
Remark 80 Um espaço é plano quando existe uma transformação (a mesma para todos os pontos) que leva
a métrica na forma canônica acima.
Lembrando agora da idéia de Minkowski de descrever as TL como rotações num espaço quadridimensional
com métrica , podemos a…rmar que nosso espaço 4D é plano, independente do sistema de coordenadas que
escolhemos, se existe uma (única) transformação (ou relação) entre as coordenadas que leve a métrica na
forma . Uma vez que esta característica é respeitada pelas TL, dizemos que estas transformações não curvam
o espaço.
É importante lembrar que estamos falando do espaço 4D, ou seja, mesmo que tenhamos apenas uma
coordenada espacial, ainda podemos ter um espaço curvo. Além disso, a curvatura não deve ser confundida
(visualmente) com a curvatura usual do espaço 3D, apesar de ambas compartilharem de várias características
matemáticas. Mesmo assim, se apenas a parte espacial da métrica no espaço de Minkowski não mais assumir
156
a forma canônica, podemos a…rmar que a geometria de todos o espaço 4D não é mais euclidiana. Por isso
o exemplo acima é legítimo para a…rmar que o tratamento geométrica da gravidade (no mesmo sentido do
tratamento geométrico das TL) envolve uma geometria não-euclidiana.
O tratamento matemático rigoroso para se tratar espaços cujas propriedades violem os axiomas de Euclides
foi desenvolvido muito antes da TRG, principalmente por Riemann e Lobachevsky. O objetivos destes
trabalhos tinha a aplicação extremamente prática de realizar medidas em terrenos irregulares. Imagine
que você vive na superfície de um planeta que não seja plano (como o que você vive!). Seria possível,
fazendo medidas apenas na superfície deste planeta, i.e., sem olhá-lo do espaço nem observando nada fora
da superfície, descobrir que ele não é plano. A resposta a esta pergunta é a…rmativa. Se você possuir
réguas, compassos e transferidores com precisão in…nita, você pode medir, por exemplo, os ângulos internos
dos triângulos desenhado no chão e descobrir que estes não somam 180o . Assim, imagine que você seja uma
criatura bidimensional, que seria o mesmo que só poder realizar medidas através de desenhos riscados
no chão. Para você a terceira dimensão, ou a noção de altitude não faz sentido (é apenas uma abstração
inventada pelos teóricos) ainda assim você será capaz de determinar se a geometria do seu espaço é ou não
euclidiana. Como você não tem a noção de profundidade, obviamente a idéia de curvatura não faz muito
sentido. Mas, mesmo assim, simplesmente por seu espaço não ser euclidiano, você dirá que ele é “curvo”.
Este ponto é importante porque a noção geométrica usual de curvatura no nosso espaço quadridimensional
só faz sentido se imaginarmos que ele está imerso num espaço plano de dimensão maior. Mas não precisamos
tentar dar um signi…cado físico para este espaço 5D.
6.1
Métrica
Os trabalhos originais em geometria não-euclidiana, ou geometria riemanniana, possuem exatamente a idéia
acima de podemos descrever as características de uma superfície plana apenas por medidas desenhadas no
chão (sem a possibilidade de usar aviões ou satélites). Para o caso de planos, o conceito é extremamente
simples. Primeiro você imagina que a superfície a ser estudada possa ser imersa numa superfície de dimensão
maior e que esta superfície maior é euclidiana. Ou seja, seu plano é uma superfície curva bidimensional
E imersa num espaço euclidiano tridimensional M . Com isso, temos no nosso espaço duas opções para
marcarmos pontos no plano. O primeiro é usar o espaço M , i.e., as coordenadas (x1 ; x2 ; x3 ) e saber que a
geometria nestas coordenadas é plana. Ou seja, a métrica do nosso espaço 3D vale
0
1
B
e=@ 0
0
0
1
0
1
0
C
0 A ; eab =
1
ab
:
Agora, nada impede você, que vive na superfície bidimensional, de fazer desenhos no chão, com retas
paralelas (que não se cruzam) e perpendiculares e a cada ponto do espaço onde as retas se cruzam registrar as coordenadas u1 e u2 . Assim, nosso espaço E (o plano) tem um sistema de coordenadas euclidiano
157
(xi ; i = 1; 2; 3) e outro no plano (u ; = 1; 2). Obviamente, a cada ponto no plano com coordenadas (u1 ; u2 )
podemos determinar as coordenadas deste ponto no sistema euclidiano
u = u (x1 ; x2 ; x3 ) ;
= 1; 2 ;
e, obviamente, para pontos no plano
xi = xi (u1 ; u2 ) ; i = 1; 2; 3 :
Além disso, se dois pontos no plano tem sua distância in…nitesimal dxa (de sorte que possamos imaginar
que estes pontos são ligados por uma reta, mesmo em E) na direção a com relação ao sistema euclidiano,
esta distância está relacionada com diferenças nas coordenadas do plano pela regra da cadeia
dxa =
@xa 1 @xa 2
@xa
du
+
du
=
du
@u1
@u2
@u
onde os índices latinos marcam as coordenadas no espaço 3D (a = 1; 2; 3) e os gregos das coordenadas no
plano ( = 1; 2). Esta relação nos permite relacionar comprimentos e ângulos medidos por ambos os sistemas
de coordenadas . Mais especi…camente, sabemos que as medidas de ângulos e distâncias são dados pela
métrica do espaço, ou seja
@xa @xb
du du = eab xa xb du du
@u @u
; = 1; 2 e a; b = 1; 2; 3 :
ds2 = eab dxa dxb = eab
= g du du ;
158
A quantidade
g
= eab xa xb =
ab
@xa @xb
;
@u @u
é a métrica do espaço E, ou seja, esta quantidade de…ne distâncias e ângulos em E usando as
coordenadas u.
No nosso caso, como eab = ab poderíamos simpli…car a expressão acima, mas vamos deixá-la desta forma
para casos mais gerais onde o espaço M possui uma dimensão e uma métrica arbitrária. Ou seja, dado um
espaço M de dimensão d + 1 e uma métrica e, esta características induzem uma geometria numa superfície
E, imersa em M , de dimensão d com uma métrica g.
No caso acima a matriz g é uma matriz 2 2 que pode assumir qualquer forma dependendo de como
marcamos as coordenadas locais u. Além disso, podemos saber se a nossa superfície E é plana se existir um
sistema de coordenadas que possamos marcar continuamente no chão (i.e., um mesmo sistema para a toda
superfície) e deixe a nossa métrica na forma canônica e. Caso contrário, saberemos com certeza que nosso
espaço é curvo.
Obviamente, pela construção acima, precisamos conhecer e e como as coordenadas do plano dependem
das do espaço euclidiano para construir g. Mas, na prática, esta quantidade pode ser construída diretamente
fazendo medidas no chão e usando instrumentos (réguas, transferidores etc.) com precisão in…nita (ou,
no caso de terrenos, com precisão muito maior que a irregularidade dos terrenos). Uma vez conhecido g
podemos medir distâncias, ângulos e áreas (i.e., podemos fazer geometria) no nosso plano E usando apenas
as coordenadas u, sem nunca mais fazemos referencias as coordenadas (xi ).
Todo o desenvolvimento acima pode ser trivialmente modi…cado para o caso em que a nossa superfície E
tem dimensão n e o espaço M tem dimensão n + 1.
6.2
Espaço tangente e vetores
Acima vimos como toda a geometria pode ser realizada por medidas feitas apenas por um ser bidimensional.
Entretanto, além de geometria, um conceito extremamente importante para o desenvolvimento de problemas
em física é o conceito de vetor. Observe que esta idéia não pode ser diretamente levada para o plano. Pois
a idéia geométrica de um vetor, como uma seta que aponta em alguma direção de M não fará sentido em E
sempre que esta direção não for paralela ao plano E. Assim, uma seta que pode ser um vetor num ponto de E
não mais será num outro ponto. Diferente da noção do espaço euclidiano, onde um vetor pode ser deslocado
por todo o espaço (e.g., na operação de soma ligamos as origens) em espaços curvos a noção de vetor está
intimamente ligada ao ponto onde ele é de…nido. Além disso, não queremos inventar uma nova noção de
vetores como “setinhas curvas” no nosso plano, pois assim teríamos de rede…nir toda a álgebra vetorial.
Remark 81 Precisamos então de uma noção de vetor relacionada com cada ponto de E e que guarde semelhança algébricas com a noção de setas em M .
159
Voltemos ao sistema de coordenadas do espaço 3D onde introduzimos uma base de vetores ortonormais
(^
e1 ; ^
e2 ; ^
e3 ). Assim, podemos de…nir um ponto P de E através de um vetor x como (veja …gura 1),
x = xa^
ea 2 E ;
xa = xa (u1 ; u2 ) ;
a = 1; 2; 3;
ou seja, dado um ponto P em E com coordenadas (u1 ; u2 ), podemos encontrar no espaço 3D o vetor x com
componentes x1 ; x2 ; x3 .
Além disso, dado um ponto P em E, podemos encontrar em M um plano tangente a este ponto. Uma
base para este plano pode ser dada por
@xa
;
xa =
@u
observe que x = x1 ; x2 ; x3
de…nidos)
é um conjunto de 2 vetores em M (até agora apenas vetores em M estão
x = xa ^
ea ; xa =
@xa
:
@u
Vetores de…nidos neste plano tangente envolvem apenas a idéia de direção e de magnitude em E. Ou seja,
para nossa criatura bidimensional localizada num certo ponto P , um vetor no plano tangente aponta na
direção que ele olha e tem uma certa magnitude, sem nenhuma noção de altura relacionada.
Podemos agora de…nir um vetor A num ponto P de E como
A = A1 x1 + A2 x2 = A x = A
xa ^
ea
(78)
e A são as componentes de A na base de…nida por xa (u1 ; u2 ). Dizemos que A (uma quantidade com 2
componentes) é um vetor de E no espaço tangente em P . Assim, apesar de perder a sua característica
geométrica, os vetores mantêm as suas características algébricas. Em especial, vetores no plano têm apenas
duas componentes. Observe que, para superfícies E curvas, este espaço terá uma orientação diferente em
cada ponto.
6.2.1
Lei de transformação
É importante observar que o sistema de coordenadas global está sujeito a certas transformações. Contudo,
estas transformações não são arbitrárias. Além de inversíveis, a transformação u ! u deve fornecer,
@2u
@2u
=
:
@u @u
@u @u
Ou seja, sendo M
= @ u =@u a matriz de transformação, por ser um campo matricial esta deve satisfazer
@M
@u
@M
@u
160
=0
:
(79)
Para uma mudança no sistema de coordenadas global u ! u as componentes (78) tornam-se
A=A
@xa @ u
@u
^
ea =
A (xa ^
ea ) = M
@ u @u
@u
A (xa ^
ea ) ;
xa =
@xa
@u
:
Com a nova base para o espaço tangente xa de…nido pela nova coordenada xa (u1 ; u2 ). A transformação
acima é a conhecida lei de transformação de vetores cotravariantes.
Pelo procedimento acima, descrevemos vetores em um ponto do espaço através de um sistema de coordenada local (xA ) de…nido a partir de um sistema de coordenada global (u ). Na verdade, este sistema de
coordenada local, ou frame, pode ser qualquer conjunto de vetores que, para cada ponto, forme uma base para
o espaço tangente. Para espaços planos (podemos saber se um espaço é plano através de sua métrica), como
os espaços tangentes coincidem, podemos utilizar o mesmo sistema de coordenadas para todos os pontos do
espaço, mas, no caso geral, este sistema será diferente em cada ponto.
O desenvolvimento anterior for realizado para garantir
ds2 =
a
b
ab dx dx
= g du du ;
;
= 1; 2 e a; b = 1; 2; 3 :
Ou seja, podemos medir distâncias na superfície usando o sistema de coordenada em M ou em E. Além
disso, esta distância (uma quantidade geométrica) não deve depender do sistema de coordenadas escolhido
(em nenhum dos dois espaços). Assim, se realizamos uma mudança de coordenadas u ! u , devemos ter:
g du du
= g du du
@u
= du =
du
@u
Uma vez que as quantidade d se transformam como um vetor contravariante, temos:
g du du = g M
M
du du = g du du
O que só será verdade para qualquer distância se
g M
M
=g
=) g
= M
1
M
1
g
Qualquer quantidade que, por uma mudança de coordenadas u ! u , se transforme como as componentes
da métrica
A = M 1
A
é chamado de vetor (ou tensor) covariante.
A exigência de que nossas transformações sejam um difeomor…smo garante que em cada ponto do espaço
161
possamos inverter a relação u ! u , ou seja, a matriz g
9g
jg
g
possui (em cada ponto) uma inversa
=
;
A exigência de que a igualdade acima seja válida para qualquer sistema de coordenadas e o fato da métrica ser
um tensor covariante e garante que g é um tensor contravariante. Além disso, os resultados acima garantem
que, se A e B são vetores contravariantes a quantidade
A g B
é um invariante e a quantidade
A =g A
é um vetor covariante. Ou seja, toda a álgebra de levantamento e abaixamento de índices, desenvolvida em
espaços planos continua válida em espaços curvos se usarmos g como tensor métrico.
6.3
Conexões e a derivada covariante
Um dos problemas centrais na análise de espaços curvos, está na introdução de um operador de diferenciação.
Se usarmos a idéia comum de derivada, teremos que a derivada de um vetor A num ponto U vale
@ AjU =
@A
@u
A (U + " )
!0
"
= lim
U
"
A (U )
:
onde " é a componente do vetor, ou seja, um número.Contudo, não sabemos realizar a operação A (U + " )
A (U ). Se voltarmos a olhar nosso plano através do espaço de dimensão maior da seção anterior, veremos
que estes dois vetores, por estarem relacionados a pontos diferentes do espaço, pertencem a planos tangentes
diferente. Se realizarmos a soma destes vetores de forma usual, o vetor resultante não pertencerá, em geral,
ao plano tangente de nenhum dos dois pontos. Mais ainda, ele pode não pertencer ao plano tangente de
nenhum ponto de E e, consequentemente, não ser um vetor de E.
Já na concepção usual de vetores no espaço euclidiano, a adição de vetores requer o transporte do “…m”
de um dos vetores ao “inicio” do outro. Se desejarmos continuar utilizando as operações de soma de vetores
em espaços planos, devemos encontrar uma forma de transportar o vetor do ponto U para o ponto U + "u , de
sorte que a quantidade obtida seja também um vetor neste ponto. Feito isto, podemos realizar as operações
no plano tangente em U + " de forma usual. Vamos imaginar que sabemos realizar esta operação que
associa (ou conecta) vetores em pontos in…nitamente próximos,
AT (U + ") = T ( "; U ) [A (U )] ;
162
(80a)
onde A, AT e " são vetores. Com isto, nossa derivada se torna
A (U + " )
D A = lim
T ( " ; U ) [A (U )]
:
"
!0
(81)
Uma vez que a operação A (U + ) T ( "; U ) [A (U )] se realiza no mesmo plano tangente, podemos usar a
noção convencional de soma de vetores. Esta noção nos diz que o resultado desta soma e, conseqüentemente,
da operação de diferenciação, deve ser uma vetor.
Vamos agora exigir que nossa operação de transporte seja linear, ou seja, podemos escrever as componentes
do vetor transportado como uma combinação linear do vetor original
AT (U + ) = T ( "; U ) A (U ) :
(82)
Como T (0; U ) = I (identidade), podemos esperar que, para valores pequenos de , a relação (82) possa
ser escrita como
AT (U + ") = (1
"
(U; ")) A (U ) ;
para alguma transformação . Substituindo este resultado em (81) temos
D A = lim
A (U + " )
(1
"
) A (U )
"
A (U )
"
A (U )
+
"
" !0
A (U + " )
!0
"
= lim
"
lembrando agora que " possui apenas a componente
D A = lim
!0
(i.e., " =
A (U + " )
"
A (U )
+
"; " 2 R) temos
A (U )
Introduzindo um sistema de coordenada global e realizando a variação apenas em uma direção, ou seja " = " ,
teremos
A (U + " )
!0
"
@A
=
+ A:
@u
D A = lim
A (U )
+
A (U )
(83)
Se A é um vetor contravariante, podemos explicitar os índices na expressão acima escrevendo
D A =
@A
+
@u
A
onde a posição dos índices da quantidade apenas segue a nossa convenção de soma (poderíamos, da mesma
forma escrever
). Toda a construção acima é feita para que a quantidade D A se transforme como um
163
tensor uma vez covariante e uma vez contravariante. Assim, a derivada covariante calculada no sistema de
coordenadas u deve se relacional com a calculada no sistema u como:
D A = M
1
M
D A ;
M
1
=
@u
@u
Com isso, usando o fato de A ser um vetor
D M
A = M
1
M
D A ;
(84)
onde,
D M
A
= D A =
=
M
1
=
M
1
@
A +
A
@u
@
A )+
(M
@u
@M
A + M
@u
M
1
A
M
@A
+
@u
M
A
Somando e subtraindo
M
1
M
A ;
podemos escrever a equação acima como
D M
A
@M
@u
=
M
1
=
M
1
M
D A + M
1
=
M
1
M
D A + M
1
=
M
1
M
D A + M
1
M
A + M
1
@M
@u
@M
@u
@M
@u
M
@A
+
@u
A
+
M
A +M
A
M
A +M
A
M
A +M
A
M
A
usando (84)
M
1
M
D A + M
1
M
1
@M
@u
@M
@u
M
M
164
A +M
A
=
+M
A
=
M
0
1
M
D A
sendo o vetor A arbitrário temos
1
M
M
= M
@M
@u
1
1
M
M
M
1
=
M
@M
@u
M
1
M
1
:
(85)
Temos assim a lei de transformação das conexões . Esta lei de transformação garante, como era de se
esperar, que a derivada covariante D se transforme como um vetor covariante.
Os resultados acima podem ser diretamente estendidos para um tensor de segunda ordem
D A
=
@A
@u
+
A
+
A
ou qualquer tensor de ordem mais alta.
Um ponto importante a se observar sobre a conexão é o seguinte. Toda quantidade com dois (ou mais)
índices pode ser decomposto numa parte simétrica e outra anti-simétrica:
Mab = S(ab) + A[ab]
onde
Mab + Mba
=
2S(ab) ) S(ab) =
Mab
=
2A[ab] ) A[ab]
Mab + Mba
2
Mab Mba
=
2
=
]
Mba
Assim, a nossa conexão pode ser escrita como:
(
)
+
[
Observe agora que na lei de transformação (85) a parte que faz com que a conexão não se transforme como
um tensor é apenas o último termo desta expressão e, além disso, este termo é simétrico nos índices
M
1
@M
@u
M
1
= M
1
@M
@u
M
1
O que signi…ca que este termo não participa da transformação da parte anti-simétrica da
conexão. Ou seja, diferente da parte simétrica ( ) , a parte antisimétrica da conexão [ ] se transforma
como um tensor.
Exercise 82 Suponha que a conexão é puramente anti-simétrica, substitui em (85) e veri…que que esta se
transforma como um tensor.
165
6.4
Regra de Leibniz
Se impusermos agora que nossa derivada covariante respeite a seguinte regra do produto (ou
regra de Leibniz)
D A
~ M
A )= D
= D (M
=
D M
A +M
A +M
M
1
D A
D A
onde D M
é a derivada covariante do tensor M
. Lembrando que, até aqui, nós só sabemos derivar
tensores contravariantes, isso signi…ca que esta quantidade (apesar de existir) não é a derivada calculada
antes. Ou seja, é uma quantidade que ainda não sabemos calcular. Mesmo assim, usando o fato de D ser
um vetor, temos
D (M
M
A )= D M
A + M 1
D A
;
(86)
usando a relação (84)
D M
A = M
1
M
D A
temos
D (M
)=0 ;
Ou seja, a derivada covariante da matriz de transformação é nula. Suponha agora que você efetuou uma
transformação qualquer no seu vetor
A =R
A
e exigiu que esta transformação comute com a operação de derivada covariante
D (R
A )=R
D A ;
(87)
Repetindo o procedimento acima temos
D (R
)=0:
(88)
Se voltarmos à de…nição da derivada covariante:
D (R
A ) = lim
R
A (U + " )
!0
166
T ( " ; U ) [R
"
A (U )]
:
a comutação (89) fornece
T ( " ; U ) [R
A (U )]
"
A (U + " ) T ( " ; U ) [A (U )]
= R
lim
" !0
"
R
A (U + " ) R
T ( " ; U ) [A (U )]
=
lim
" !0
"
lim
R
A (U + " )
" !0
ou seja,
T ( " ; U) R
=R
T ( " ; U)
(89)
Ou seja, invertendo os passos acima, adotar (??) signi…ca dizer que qualquer transformação (ou
quantidade) que comute com o transporte paralelo, no sentido (89), terá derivada covariante
nula.
Seguindo um caminho análogo ao desenvolvido para estudar a derivada covariante de um vetor contravariante, podemos escrever
@A
D A =
+~ A ;
@u
onde a quantidade ~ é, certamente, diferente da obtida anteriormente. Ou seja, se seguirmos o desenvolvimento anterior, obteremos uma lei de transformação diferente para esta quantidade. Além disso, através
das suposições feitas até aqui, nada nos permite relacionar esta quantidade com . Entretanto, podemos
estabelecer esta relação se adotarmos (ou exigirmos) que a nossa derivada obedeça a regra de
Leibniz.
Voltando a expressão para a derivada covariante de um vetor contravariante podemos escrever
D
g
A
@g A
+
@u
@g
A +g
@u
=
=
g
A
@A
+
@u
g
A ;
Onde usamos que a derivada usual respeita a regra de Leibniz.
Vamos agora adotar, ou impor, que a nossa derivada covariante obedece à regra Leibniz. Com isso
D
g
A
=
=
D g
A +g
@g
@u
+
g
g
(D A )
+
A +g
167
g
~
A +g
A =0
@A
+~
@u
A
multiplicando por g
temos
A =
~ A
Esta expressão será válida para qualquer vetor covariante A se
~
=
Ou seja, a derivada covariante de um vetor covariante é dada por
D A =
@A
@u
A
o mesmo é válido para tensores somando os termos extras.
Vemos então que para trabalharmos em espaços curvo precisamos conhecer duas quantidades: a métrica
e a conexão. A métrica pode ser de…nida analisando-se a geometria da superfície (desenhado círculos e
triângulos) já a conexão é um ponto mais delicado. Voltaremos a este ponto no futuro.
6.5
Símbolo de Christo¤el
Se acreditarmos que a derivada covariante é realmente a diferença entre dois vetores e que o resultado desta
operação é um tensor, então devemos esperar que este tensor obtido não dependa de estarmos trabalhando
com as componente covariante ou contravariantes do vetor que estamos diferenciando.
D A =g
D A ; D A =g
D A :
Mais especi…camente, derivar as componentes covariante de um vetor A e, em seguida, tomarmos as componentes contravariantes do resultado, deve ser equivalente a derivarmos diretamente as componentes contravariantes deste vetor
D g A =g D A :
Ou seja, a operação de derivação covariante comuta com a operação de levantamento e abaixamento de índices.
Como vimos na seção anterior, isso implica que esta operação comute com a noção de transporte paralelo.
De outra forma, podemos exigir que a noção de transporte paralelo introduzida (lembrando que até aqui só
sabemos desta quantidade a sua lei de transformação) preserve a característica geométrica da operação de
abaixamento de índices. Assim, as componentes covariante e contravariantes são apenas descrições diferentes
da mesma quantidade geometria que é o vetor (no espaço M ). Esta característica, somada a exigência da
regra de Leibniz, nos permite obter novas características da conexão.
Lembrando agora o resultado da seção anterior (88) que garante que qualquer transformação que comute
transporte paralelo tenha derivada covariante nula, a exigência do parágrafo anterior garante que
D g
=D g
168
=0:
Um transporte paralelo (ou uma conexão) que respeita esta igualdade é chama de compatível com a métrica.
Apesar de bastante intuitiva existem trabalhos em gravitação que usam conexões que não são compatíveis com
a métrica. Entretanto, grande parte das teorias, incluindo a de Einstein, utiliza apenas conexões compatíveis
com a métrica.
Para uma conexão compatível com a métrica
D g
=0)
@g
@u
g
@g
@u
=g
+g
temos
g
=0
(90)
Permutando os índices temos:
@g
@u
@g
@u
= g
+g
= g
+g
Somando as duas expressões acima e subtraindo (90) temos:
@g
@u
+
@g
@u
@g
@u
=g
+
+g
(
)+g
(91)
Lembre agora que qualquer quantidade (tensor ou não) com dois (ou mais) índices, pode ser decomposto
numa parte simétrica e outra antí-simétrica nestes índices, por exemplo,
Mab = S(ab) + A[ab]
onde
Mab + Mba
2
Mab Mba
=
2
Mab + Mba
=
2S(ab) ) S(ab) =
Mab
=
2A[ab] ) A[ab]
Mba
Com isso, podemos escrever (91) como
@g
@u
onde
(
)
+
@g
@u
@g
@u
=g
é a parte simétrica da conexão e
[
2
]
(
)
+g
2
[
]
+g
2
[
]
sua parte anti-simétrica. Observe agora que o lado esquerdo
169
da expressão acima é simétrica em ;
e em ; . Ou seja, a expressão acima só pode ser verdadeira se
g
2
[
]
+g
(
)
=
com isso
g
Ou multiplicando por g
2
2
@g
@u
+
[
]
@g
@u
=0
@g
@u
,
(
)
=
g
@g
@u
2
+
@g
@u
@g
@u
Ou seja, para conexões compatíveis com a métrica, a parte simétrica da conexão é completamente
determinada se a métrica for conhecida. A quantidade ( ) acima é conhecida como símbolo de Christo¤ el.
A Teoria da Relatividade Geral, ou a Teoria de Einstein da Gravitação, impõe que a parte anti-simétrica
da conexão seja nula, i.e., = 0. Uma teoria mais geral, chamada de Einstein-Cartan, relaxa esta condição.
A parte antisimétrica da conexão é também chamada de torção. Além disso, como observado anteriormente,
a parte antisimétrica da conexão se transforma como um tensor, i.e., a torção é um tensor.
Observe que este tensor introduz diferenças, não apenas quantitativas, mas conceituais na teoria da
relatividade. Uma característica das nossas transformações serem difeomor…smo é que isso garante que, para
todo ponto X do espaço, existe uma transformação x-x que leva a métrica na forma
g
(X) =
. Além disso, o princípio da equivalência garante que um observador que para um observador caindo livremente no campo gravitacional a métrica é plana. Ou seja, existe um sistema de coordenadas onde, não apenas
a métrica tem a forma acima, mas também ela é constante em toda vizinhança (que pode ser tão pequena
quanto se queira) deste ponto. Assim, existe um sistema de coordenadas (ou um referencial) onde :
@g
@x
X
=0)
(
)
(X) = 0
logo, se consideramos que a torção é nula, neste ponto X
D =@
Isso garante que, para o referencial que cai livremente, as leis da relatividade geral sejam iguais as da restrita.
Entretanto, sendo a parte anti-simétrica da conexão um tensor, temos que, se
[
]
=0
170
então ~ [
]
= 0 para qualquer outro sistema de coordenada. Da mesma forma, se
[
]
6= 0
não existe nenhum sistema de coordenadas para o qual ~ [ ] = 0 e, desta forma, a derivada
covariante não se reduz a usual e, se alguma equação do nosso sistema depender da derivada covariante,
não teremos mais a equivalência entre a relatividade restrita e geral.
Alguns resultado de TQC indicam que a torção estaria relacionada com o spin das partículas. Ou seja,
assim como a massa curva o espaço, o spin das partículas o torce. Muitos trabalhos atualmente desenvolvem
teorias com torção. Em especial, estudos de certas características da torção podem fornecer modi…cações da
Teoria de Einstein capazes de explicar certas discrepâncias observacionais (e.g., coisas escuras). O estudo da
conexão é praticamente um ramo da Física.
Remark 83 Usar o símbolo de Christo¤ el é exigir que a noção de derivada covariante respeite a regra de
Leibniz e que a conexão seja compatível com a métrica.
7
A geometria da relatividade
Pelas discussões anteriores temos que os efeitos dos campos gravitacionais podem ser descritos modi…cando a
geometria do espaço de Minkowski para uma geometria não-euclidiana. Além disso, o ferramental matemático
necessário para se tratar problemas deste tipo é dado pela geometria de Riemann. Neste formalismo, o desenvolvimento é feito através da determinação da métrica e da conexão, ou, no caso da Relatividade Geral,
apenas da métrica. Esta, por sua vez, no caso de superfícies imersas (e.g., terrenos) pode ser determinada
através da medida de partes da superfície (e.g., triângulos).Entretanto, observe que para efetuar estas medidas estamos supondo que os instrumentos (réguas e transferidores) não sofrem da deformação do terreno.
Entretanto, no caso da relatividade todos os instrumentos de medida (réguas e relógios) se deformam junto
com a geometria. Assim, neste caso, a determinação da métrica requer um pouco mais de cuidado. Mas
vamos ver como isso é feito.
Continuando, os efeitos da relatividade restrita (mais especi…camente os efeitos das transformações de
Lorentz) podem ser descritas geometricamente através de um espaço com uma métrica
0
B
B
=B
B
@
1
0
0
0
1
0 0 0
C
1 0 0 C
C
0 1 0 C
A
0 0 1
Pela semelhança com a métrica euclidiana vamos chamar está de a métrica do espaço plano. Já os efeitos dos
campos gravitacionais (ou acelerações) exigem que, se quisermos manter a descrição geométrica, tenhamos de
171
lidar com uma geometria não euclidiana, ou seja, que o espaço que descreverá estes efeitos seja curvo. Assim,
os efeitos dos campos gravitacionais podem ser introduzidos nas características do espaço-tempo se, ao invés
da métrica plana
, usarmos a métrica mais geral g . Lembre que, na verdade, é uma pseudo-métrica,
mas isso não introduz nenhuma di…culdade neste processo. Esta modi…cação implica que o produto escalar
e, conseqüentemente, o processo de levantamento e abaixamento de índices seja feito usando g e não mais .
Não estamos dizendo que é a métrica de um espaço plano de dimensão maior, mas apenas a métrica
do espaço que queremos analisar. Ou seja, dizer que nosso espaço tem métrica signi…ca que qualquer
desenho que façamos no nosso espaço será euclidiano. Se isso não for verdade, então devemos usar algum
g no lugar de , mas g e descrevem espaços de mesma dimensão, i.e., o nosso espaço quadridimensional.
Mas, como dissemos antes, queremos desenvolver toda a nossa teoria apenas analisando as características do
nosso espaço, mesmo que a noção geométrica de curvatura implique na existência de um espaço de dimensão
maior. Para nós este espaço maior não é físico. Além disso, vamos chamar as coordenadas do nosso espaço
de x e não de u, como …zemos antes. Ou seja, x são as coordenadas do nosso espaço que pode ser curvo.
Sendo a métrica um tensor, por uma mudança no sistema de coordenadas x ! x
~, esta se transforma
como:
@x
~
x!x
~ : g~ = M 1
M 1
g ; M
=
:
@x
Se invocarmos agora novamente o princípio da correspondência temos que, mesmo na presença de um
campo existe um referencial (acelerado) que não sente a presença deste campo. Assim, se você está num
container que cai sob a ação do campo da terra nenhum experimento dentro do seu container sofrerá a
in‡uência deste campo (desprezando efeitos de maré). Assim, seu espaço se comportará como se valessem
as leis da relatividade restrita num referencial inercial. Ou seja, se você marcou nas paredes do container
o sistema de coordenadas x
~1 ; x
~2 ; x
~3 e usa o seu relógio para registrar o tempo t~, neste ser sistemas de
coordenadas x
~0 ; x
~1 ; x
~2 ; x
~3 a métrica será
g~
=
0
B
B
=B
B
@
1
0
0
0
1
0 0 0
C
1 0 0 C
C :
0 1 0 C
A
0 0 1
Obviamente as suas coordenadas podem ser relacionadas com as coordenadas de alguém parado na terra
(que sente o campo) através de uma transformação
x0 ; x1 ; x2 ; x3 ! x
~0 ; x
~1 ; x
~2 ; x
~3
que envolve acelerações. Assim, os efeitos do campo gravitacional, para a pessoa que está na terra pode
172
ser feito usando a métrica
= M
1
M
1
g
; M
=
@x
~
@x
ou, invertendo a relação,
g
(x) = M
M
;
(92)
Ou seja, g pode ser determinada estudando as derivadas @ x
~ =@x , ou, de forma equivalente, estudando
a queda de corpos nos campos gravitacionais.
Observe que, diferente de antes, agora tanto o observador na terra, quanto o observador no container
podem usar as leis da física, desde que o primeiro use g e o segundo use . Ou seja, as leis da física não são
válidas mais apenas em referenciais inerciais, mais em qualquer referencial (desde que este seja capaz de
determinar a métrica do seu referencial). Assim, apesar de mantermos a noção de referenciais inerciais (são
aqueles onde a métrica é plana) a aplicação das leis foi generalizada para qualquer observador. Assim, as
transformações permitidas para o nosso sistema de coordenadas não são mais apenas as transformações de
Lorentz, mas qualquer transformação inversível diferenciáveis cuja inversa seja também diferenciável, ou os
difeomor…smos. Estas transformações também formam um grupo bem maior que o grupo de Lorentz. Todas
estas generalizações permitem chamarmos esta nova teoria de Teoria da Relatividade Geral.
7.1
Equação da geodésica
Entretanto, como mencionado acima, o fato de todos os instrumentos sofrerem a deformação da geometria
torna tudo um pouco mais difícil. Se observamos um relógio que cai podemos certamente determinar a sua
posição e ler diretamente neste relógio o tempo do outro referencial. Mas gostaríamos muito de não estudar
apenas a queda de relógios. Além disso, lembrando a nossa de…nição de “ler o relógio de outro referencial”
em relatividade restrita, esta determinação depende de um conjunto de observadores espalhados por todo o
espaço. Ou seja, no exemplo anterior de um corpo que cai sob a ação do campo, como conhecer o tempo
do corpo, ou melhor, o tempo de um referencial que viaja junto com corpo. Aqui a noção anteriormente
introduzida de tempo próprio é bastante útil. Lembrando que para aplicar esta noção precisamos apenas
medir o tempo a partir de um referencial inercial. Pelo que foi dito anteriormente, o referencial (ou corpo)
que cai livremente no campo gravitacional possui a métrica do espaço plano e, conseqüentemente, é um
referencial inercial. Podemos então escolher o tempo deste referencial para registrar o tempo dos fenômenos.
Assim, sendo t~ a medida de tempo deste referencial, fazemos
= t~ :
173
Além disso, o intervalo de tempo dt registrado por qualquer observador para quem o corpo em queda livre
se move com velocidade u se relaciona com o invariante d com
r
u2
d = dt 1
:
c2
Uma vez que, num container que cai livremente, nenhuma força gravitacional pode ser detectada, uma
partícula solta dentre deste container obedece a equação:
d2 x
~
=0
d 2
onde
d~
x
@x
~ dx
d
=
)
d
@x d
d
@x
~ dx
@x d
=
d @x
~
d @x
dx
@x
~ d2 x
;
+
d
@x d 2
observando que
@x
~
df
@f dx
@2x
~ dx
d @x
~
@2x
~ dx
= f (~
x) )
=
=
)
=
;
@x
d
@x d
@x @x d
d @x
@x @x d
podemos escrever
@x
~ d2 x
@2x
~ dx dx
+
=0
@x @x d d
@x d 2
multiplicando por @x =@ x
~ temos
@x @ 2 x
~ dx dx
d2 x
+
=0
@x
~ @x @x d d
d 2
(93)
Lembrando da relação (92) entre g e
g
(x) =
@x
~ @x
~
@x @x
;
podemos calcular (onde estamos usando o fato da métrica ser plana em tida uma vizinhança, i.e., estamos
usando o Princípio da Equivalência)
@g
@x
=
@2x
~ @x
~
@x
~ @2x
~
+
@x @x @x
@x @x @x
Usando a relação inversa
=
@x @x
g
@x
~ @x
~
174
(x)
temos
@g
@x
@2x
~ @x
~
@x
~ @2x
~
+
@x @x @x
@x @x @x
@x @x
@x
~ @x
~
= g
@x @ 2 x
~ @x @ x
~
@x @x @ x
~ @2x
~
+
@x
~ @x @x @ x
~ @x
@x
~ @x
~ @x @x @x
= g
Usando
@x
~ @
@x
~ @x
@x
@
=
)
=
=
@x
@x @ x
~
@x @ x
~
@x
temos
@g
@x
@x @ 2 x
~
@x
@2x
~
+g
@x
~ @x @x
@x
~
@x @x
@x @ 2 x
~
@x @ 2 x
~
+g
@x
~ @x @x
@x
~ @x @x
= g
= g
Permutando os índices podemos calcular
multiplicando por g
@g
@x
+
@g
@x
@g
@x
= 2g
@g
@x
+
@g
@x
@g
@x
=
~
@x @ 2 x
@x
~ @x @x
=2 temos
g
2
~
@x @ 2 x
=
@x
~ @x @x
(
)
com isso a equação (93) se torna
(
dx dx
d2 x
+
=0:
)
d d
d 2
Esta equação descreve a trajetória que um ponto (uma massa pontual) em queda livre num campo
gravitacional descreve, quando vista por um observador …xo (ou não em queda livre) que usa o sistema de
coordenadas (não inercial) (x). Observe que, pela simetria de dx dx a, podemos também escrever
h
(
)
+
[
]
i dx dx
d2 x
+
=
d d
d 2
dx dx
d2 x
+
=0
d d
d 2
ou seja, podemos usar a conexão e não apenas a sua parte simétrica. Vemos então que a parte
anti-simétrica da conexão (ou a torção) não in‡uencia na equação da trajetória de uma partícula livre (que
está num referencial inercial), ou na equação da geodésica.
A expressão acima é bastante conhecida em geometria diferencial e descreve a trajetória que uma partícula
faz num espaço curvo quando esta segue a menor distância entre dois pontos. Esta é a chamada equação
da geodésica. Ou seja, um corpo que cai livremente num campo gravitacional (ou o deslocamento de um
175
referencial inercial qualquer) se dará de forma que este corpo percorra a menor “distância” (ds ou d ) no
espaço-tempo. Ou seja, o campo gravitacional do sol curva o espaço-tempo e a trajetória dos planetas, ou
cometas, é a menor distância possível para se deslocar neste espaço curvo. Obviamente, se nos limitarmos
apenas nas coordenadas espaciais, isso não faz sentido.
Consideremos o caso de uma partícula que se move com uma velocidade não muito grande num campo
gravitacional bem fraco e estacionário. Sendo a velocidade da partícula pequena temos
dxi
d
=
dx0
d
= c
dxi
q
dt 1
dt
q
dt 1
'
u2
c2
u2
c2
dxi
= ui
dt
=q
1
c
u2
c2
'c;
e a condição c >> u implica
c >> u )
dxi
dx0
>>
:
d
d
Com isso,
(
d2 x
dx dx
+
=
)
d d
d 2
dx0 dx0
+
(00)
d d
dxi dxj
'
(ij)
d d
(00)
dx0
d
2
2
e a equação da geodésica se torna (até ordem de (u=c) )
d2 x
+ c2
d 2
dt
d
00
2
=0
Como o campo é estacionário as componentes de g não variam com o tempo
(00)
=
g
2
@g
@g
+
@x0
@x0
@g00
=
@x
g
@g00
:
2 @x
Além disso, como o campo é fraco, podemos dizer que a métrica não é muito diferente da métrica do espaço
plano
g =
+ h ; jh j << 1 ;
assim, em primeira ordem em h temos
@h00
2 @x
(00)
=
c2
@h00
2 @x
voltando a equação da geodésica
d2 x
d 2
176
dt
d
2
=0
temos
d2 xi
d 2
d2 xi
d 2
d2 x
d 2
2
ji
0i
@h00 dt
@h00
@h00
= c2
+
0
2 @x
d
2 @x
2 @xj
"
#
2
ji
1 @h00
@h00
dt
d2 xi
2
= c
= c2
=)
j
2
2 @x
d
d
2 @xi
i
= c2
=
c2
[rh00 ]
2
dt
d
dt
d
2
2
2
dt
d
e
d2 x0
d 2
= c2
=
0
dt
d
@h00
2 @x
1 @h00
2 @x0
c2
Com isso
c2
d2 x
=
[rh00 ]
d 2
2
=
i0
@h00
@h00
+
2 @x0
2 @xi
00
= c2
dt
d
2
dt
d
2
2
= 0 =) c2
dt
d
2
d2 t
dt
=C
= 0 =)
2
d
d
1 d2 x
1
c2
[rh00 ] C 2 =) 2 2 = c2 [rh00 ]
2
C d
2
onde
dx
d
d dx
d d
=
=
=
dx dt
dt d
d dx dt
dx d2 t
+
d dt d
dt d 2
d2 x
dt2
dt
d
2
temos
=
d2 x
dt2
d dx
d dt
=
dt
=
d
dt d dx
d dt dt
dt
d
C2
1
d2 x
= c2 [rh00 ] :
dt2
2
Se imaginarmos que para as condições impostas os efeitos relativísticos possam ser desprezados, podemos
usar a equação de Newton
d2 x
= r
dt2
onde
(r) =
GM
r
é o potencial gravitacional, para escrever:
h00 = 2
c
) g00 =
177
1+2
(r)
c
Estas expressões mostram as relações entre as teorias de Einstein e de Newton para o caso de campos fracos.
Mais ainda, mostram como as trajetórias das partículas (e algumas considerações físicas) podem ser usadas
para determinar as componentes da métrica.
Considere um observador (qualquer) com um relógio. Para este observador as coordenadas do relógio
(parado no seu pulso) obedece
d
2
=
g00 dx0 dx0 + gij dxi dxj =
g dx dx =
g00 dx0 dx0
Se, visto pelo observador que usa as coordenadas x este relógio cai com velocidade
dx
=u
dt
temos
d
dt
=
dt =
s
g00
dx0 dx0
dt dt
p
g00
=c
1
p
d
c
g00
Lembrando que d é o tempo (próprio) medido por um observador inercial. Esta é a razão entre o tempo
quando medido por um observador inercial (que cai com o campo, ou fora do alcance dele).
Obviamente a dilatação temporal acima afetará todos os relógios colocados no campo. De sorte que este
efeito não pode ser veri…cado diretamente. Entretanto, para dois relógios em posições x1 e x2 do campo
temos
dt1
=
dt2
=
1
p
d
c
g00 (x1 )
1
p
d
c
g00 (x2 )
Em especial, se estes tempos se relacionam com a freqüência de fótons emitidos nos pontos 1 e 2 temos:
2
1
dt1
=
=
dt2
s
g00 (x2 )
g00 (x1 )
Para a aproximação da seção anterior temos
g00 =
1+2
c
)
s
g00 (x2 )
=
g00 (x1 )
178
s
1+
1+
2
c
2
c
(x2 )
(x1 )
para
<< c
r
1+
q
1+
s
1+
1+
2
c
2
c
2
(x2 )
c
1
2
c
=
1+
=
1
(x2 )
c
(x1 )
c
(x1 )
(x2 )
'1+
(x1 )
(x2 )
c
(x1 )
c
Fazendo
1
=(
2)
1
+
2
=
+1
)
2
2
temos
+1
=1+
2
(x2 )
c
(x1 )
)
c
=
1
=
2
+1
2
1
[ (x2 )
c
(x1 )]
onde, pelas condições impostas, estamos fazendo 2 = . Este é o red shift gravitacional. Por exemplo,
usando dados reais (veja o livro do Weinberg) podemos calcular que o red shift entre fótons emitidos na
superfície do sol, chegam a terra com um red shift de
' 2:12
10
6
:
Este efeito é bem menor que as variações produzidas pelo efeito Doppler do movimento da terra em relação
ao sol.
7.2
Tensor de energia e momento
Voltemos um instante para a distribuição de cargas e correntes em espaços planos. Dado um conjunto de
cargas, podemos de…nir a densidade de carga e corrente como
J0
= c
X
n
(x; t) = c
n
Ji
=
X
n
X
qn
3
(x
xn (t))
qn
3
(x
xn (t))
n
n
(x; t) ui =
X
n
179
dxn
dt
Estas quantidades formam o 4-vetor:
J
X
=
n
(x; t) u (t) =
n
XZ
=
X
qn
3
(x
xn (t))
n
3
dt0 qn
(x
xn (t)) (t
t0 )
n
XZ
=
qn
3
(x
dxn
dt
dxn (t0 )
dt0
t0 ) dxn (t0 )
xn (t)) (t
n
XZ
=
4
d qn
(x
xn (t))
n
dxn ( )
d
Da mesma forma, dada um conjunto de partículas com 4-momento p , podemos de…nir a densidade de
partículas e a corrente de partículas como
T
0
= c
X
pn
3
(x
xn (t))
n
i
T
X
=
pn
3
(x
xn (t))
n
T
=
X
pn
3
(x
xn (t))
n
=
XZ
d pn
4
(x
dxin
dt
dxn
dt
xn (t))
n
dxn
d
Que, obviamente, se transforma como um tensor simétrico duas vezes contravariânte.
Lembrando agora a expressão (49) para o quadrimomento temos
p0 =
E i
E dxi
;p = 2
c
c dt
que pode ser escrita como
p =
Com isso,
T
=
E dx
dx
p
)
= c2
2
c dt
dt
E
Xp p
n n
(x
E
n
n
180
xn (t)) c2
Podemos calcular
@T i
@xi
@ X
p (t)
@xi n n
=
X
=
dxin @
dt @xi
pn
n
X
=
X
(x
3
pn
dxin @
dt @xin
pn
@
@t
n
=
3
n
3
xn (t))
(x
3
(x
dxin (t)
dt
xn (t))
(x
xn (t))
xn (t))
Usando
@pn 3
@ 3
(x xn (t)) + pn
(x xn (t))
@t
@t
@
dpn 3
p 3 (x xn (t))
(x xn (t))
@t n
dt
@
p 3 (x xn (t)) =
@t n
@ 3
pn
(x xn (t)) =
@t
temos
@T i
@xi
=
=
@T i
@T 0
+
i
@x
@x0
@T
@x
=
("
"
X dp
n
n 3
dt
n 3
dt
3
(x
xn (t))
X dp
n
X dp
@ T 0
@t c
X dp
n
=
@ X
p
@t n n
n 3
dt
n
(x
(x
xn (t)) = G
(x
xn (t)) = G
@T
@x
n 3
dt
#
(x
#)
xn (t))
xn (t))
=G
onde G é a densidade de força do sistema. Em particular, para um sistema livre
@T
@x
=G =0
esta quantidade se conserva. Além disso, para o caso do choque entre partículas, onde a interação ocorre
apenas pelo contato das partículas, temos:
@T
@x
=
X dp
n
n 3
dt
181
(x
xn (t))
Se um conjunto m de partículas colide no mesmo ponto c temos
estas partículas. Assim, para estas partículas
@T
@x
=
3
(x
xc (t))
X dp
m
=
dt
m
3
(x
3
(x
xn (t)) =
xc (t))
3
(x
xc (t)) para todas
d X
p
dt m m
e se mais partículas colidem em outros pontos
@T
@x
=
X
3
(x
xc (t))
c
d X
p
dt m m
O ponto é que a conservação do momento garante que, neste caso, também tenhamos
d X
@T
p =0)
dt m m
@x
=0:
Vejamos agora o que ocorre quando estas partículas possuem cargas e estão sujeitas a campos eletromagnéticos. Neste caso
dx (t)
F = qn n F
dt
dpn
dx (t)
= qn n F
dt
dt
@T
@x
=
X
qn
n
=
XZ
n
= F
dxn (t)
F
dt
d qn
n
onde F
=
F
(x
dxn (t)
F
d
d qn
XZ
3
dxn (t)
d
xn (t))
4
(x
xn (t))
4
(x
xn (t))
. Usando
J =
XZ
d qn
4
(x
xn (t))
n
@T
@x
=F
dxn ( )
d
J 6= 0 :
Ou seja, na presença do campo eletromagnético T não mais se conserva. Isso está relacionado com o fato do
sistema de partículas não mais conservar energia e momento, pois estas quantidades podem ser alimentadas
pelo campo eletromagnético. Podemos de…nir uma nova quantidade conservada se levarmos em conta o
182
momento e a energia do campo. Ou seja, adicionando ao nosso T
Tem
F
1
g
4
F
original o tensor
F F
pois
@Tem
=
@x
F
J
(94)
e, conseqüentemente,
@
(T
@x
+ Tem ) = F
J
F
J =0:
Exercise 84 Obtenha a igualdade (94).
Abrindo os termos de Tem vemos que:
00
Tem
=
1
E2 + B2
2
i0
; Tem
= "ijk Ej Bk
Que são quantidades conhecidas no eletromagnetismo como a densidade de energia e de momento,
respectivamente, do campo eletromagnético.
Ou seja, para qualquer processo mecânico ou eletromagnético a quantidade
T
=
=
Xp p
n n
(x
E
n
n
Xp p
n n
(x
En
n
xn (t)) c2 + Tem
xn (t)) c2 + F
1
4
F
F F
(95)
gera uma corrente conservada G
@T
@x
=G =0:
As componentes deste tensor são as densidades de energia e de momento do sistema. Por isso ele é chamado
tensor de energia e momento.
Todos os resultados acima podem ser diretamente “traduzidos” para a linguagem da relatividade geral.
Para tanto, basta trocar
por g e todas as derivadas @ (para manterem seu caráter vetorial) por
derivadas covariantes D
T
D T
=
Xp p
n n
(x
E
n
n
xn (t)) c2 + g F
F
1
g
4
F F
= G =0:
Este procedimento, legítimo em todas as teorias sem torção (como a relatividade Geral de Einstein), é
chamado de acoplamento mínimo.
183
Exercise 85 Mostre que, para teorias sem torção,
@ A
@ A =D A
D A
ou seja, podemos de…nir o tensor do campo eletromagnético usando a derivada covariante ou a normal.
7.3
Equações de Einstein
A lei da gravitação não pode ser deduzida de argumentos matemáticos, mas, assim como fez Newton, deve
ser proposta e testada experimentalmente. Assim, o que vamos fazer aqui não é deduzir a lei da gravitação
proposta por Einstein, mas apenas salientar caminhos e chutes que possam conduzir a esta lei.
O princípio da equivalência garante que qualquer referência que caia livremente no campo gravitacional
será um referencial inercial. Mais especi…camente, neste referencial a métrica será . Uma outra forma de
colocar esta a…rmação é dizer que: para qualquer campo gravitacional, existe um sistema de coordenadas em
que num dado ponto X do espaço-tempo a métrica é plana:
g
@g
@x
(X)
=
=
0
X
Ou seja, para um observador qualquer com sistema de coordenadas x existe uma transformação M : x ! x
que leva a métrica na forma acima num ponto X.
Observe que esta relação só é válida num ponto (ou, no máximo, numa região próxima de) X. Se fosse
possível encontrar um sistema de coordenadas em que isso fosse válido para todo o espaço, então nossa
métrica seria plana e, conseqüentemente, não haveria campo gravitacional. Observe que, mesmo para um
observado que caia livremente no campo, os efeitos de maré impedem que um único sistema de coordenadas
seja estabelecido em todo espaço. E apenas região muito pequena do espaço (menor quanto mais forte o
campo) se comportará como inercial.
Para um observador neste sistema de coordenadas o campo gravitacional pode ser muito fraco nas vizinhanças do ponto X (e nulo neste ponto). Assim, para este observador, podemos usar a aproximação anterior
obtida para campos gravitacionais fracos. Podemos obter o resultado geral lembrando que este sistema de
coordenadas está ligado aos demais por difeomor…smos. Ou seja, basta usarmos a transformação inversa
M 1 e teremos o resultado para um observador arbitrário.
Para um campo gravitacional fraco, gerado por uma densidade não relativística (estática) de massa
temos
g00 '
1+2
c
Onde
é o potencial gravitacional Newtoniano. Da mecânica clássica, sabemos que, dada a distribuída de
184
matéria , este potencial pode ser determinado resolvendo a equação de Poisson
r2 = 4 G
Como para uma partícula não relativística a energia de repouso é muito maior que a energia cinética, podemos
escrever:
T 00
= c
X
3
p0n
(x
xn (t)) =
n
' c2
X
X
En
3
(x
xn (t))
n
3
mn
xn (t)) = c2 (x)
(x
n
Combinando as duas expressões acima temos
1
c (g00 + 1) = r2 g00 =
2
r 2 = 4 G ) r2
8 G
T00
c3
(96)
Esta equação é válida apenas no sistema de coordenadas especí…co e, certamente, não é a equação covariante
que procuramos, pois esta equação deve envolver tensores em ambos os lados. Da expressão acima, podemos
adivinhar que o tensor do lado esquerdo da expressão desejada é T . Assim, a expressão procurada tem a
forma
T
[@i @i g] = 8 G 3
c
Onde o lado esquerdo é apenas um símbolo para indicar um tensor que depende de segundas derivadas da
métrica. Um chute imediato seria substituir as derivadas por derivadas covariantes, mas a compatibilidade
com a métrica faria este termo se anular.
No lugar do símbolo acima, vamos chamar este tensor de
G
= [@i @i g]
Por uma transformação no sistema de coordenadas G
~
G
= M
se transforma como
1
M
1
G
;
onde devemos lembrar que G depende das derivadas da métrica e estas derivadas (@i @i ) também se transformarão, o que implica que teremos uma combinação linear de derivadas da métrica com termos até segunda
ordem.
Assim, a equação procurada tem a forma
G
=
8 G
T
c3
185
;
(97)
onde G envolve apenas termos de termos de ordem 2 da métrica.
Além disso, G deve ser simétrico (pois T é simétrico) e deve obedecer a equação
D G
8 G
D T
c3
=
=0
Primeiramente, lembrando do símbolo de Christo¤el
(
)
=
g
2
@g
@u
+
@g
@u
@g
@u
;
vemos que a quantidade desejada pode ser construída com produtos de ( ) e derivadas desta quantidade.
Entretanto, como ( ) não se transforma como uma tensor, devemos nos perguntar: que combinações
destes produtos e derivadas obedecem a lei de transformação de um tensor?
Um resultado da geometria riemannianna 32 mostra que existe apenas uma combinação de ( ) e suas
derivadas que fornecem uma quantidade que depende apenas da métrica, e suas derivadas primeiras e segundas, e é linear nas segundas derivadas. Esta quantidade tem a forma:
@
(
)
@x
@
(
@x
)
+
(
) (
)
(
) (
)
R
=g R
Ou seja, qualquer outra combinação de ( ) e suas derivadas que tentemos adicionar a esta quantidade ou
incluirá derivadas de ordem mais alta, ou termos não lineares na segunda derivada ou destruirá
a lei de transformação tensorial. A prova de que a quantidade acima é realmente um tensor não é uma
tarefa algebricamente simples, mas exige apenas a utilização das leis de transformação de
e que @ se
é chamado
transforma como um tensor covariante (para isso, basta usar a regra da cadeia). O tensor R
de tensor de curvatura. Multiplicando ambos os lados da expressão acima por g e usando a forma explicita
do símbolo de Christo¤el temos:
R
=
1 @2g
2 @x @x
@2g
@x @x
@2g
@2g
+
@x @x
@x @x
+g
h
(
) (
)
(
) (
)
i
(98)
Da forma acima é possível veri…car que este tensor é simétrico por uma troca do primeiro e terceiro e do
segundo e quarto índice
R
=R
Isso garante que o tensor formado pela contração primeiro com o segundo índice seja simétrico nos índices
restantes:
g R
R =R
Este tensor é chamado tensor de Ricci.
3 2 O tensor de curvatura é o único tensor que pode ser construído da métrica e suas derivadas de primeira e segunda ordem e
é linear nas derivadas de segunda ordem (veja Weinberg).
186
Além disso, da expressão (98) temos também a seguinte relação de antisimetria
R
=
R
=
R
=R
;
que mostra que qualquer outra contração que tentamos fazer com este tensor é nula ou igual ao tensor de
Ricci.
Com isso, uma boa tentativa para a nossa equação da gravitação seria:
R
= KT
para alguma constante K. Entretanto, uma vez que, em geral,
D R
6= 0 ;
a equação acima não respeita a lei de conservação de energia e momento, para uma con…guração arbitrária
do campo. Ou seja, precisamos de mais um tensor simétrico formado com a métrica e suas derivadas até
segunda ordem.
Dos resultados acima tempo ainda a possibilidade de contrair os dois índices (simétricos) do tensor de
Ricci e formar um tensor de ordem zero, ou um escalar,
g
R
R
este é o chamado escalar de curvatura. Assim, dado o escalar de curvatura (que, como o tensor de Ricci,
depende apenas da métrica e suas derivadas até segunda ordem) podemos também formar o tensor
g R;
que, obviamente, é simétrico e não envolve derivadas de ordem mais alta.
Resumindo, existem apenas dois tensores simétricos que podem ser construídos respeitando as condições
acima:
R ; g R
Assim, o tensor G
procurado deve ser uma combinação destes tensores
G
= c1 R
+ c2 g R
Vamos usar agora a condição de conservação de energia e momento
D G
= D (c1 R
187
+ c2 g
R) = 0 :
(99)
Para isso precisamos derivar o tensor de Ricci. Para calcular a derivada covariante precisamos usar
explicitamente o fato que estamos escolhendo um transporte paralelo sem torção
=
(
)
Mostre que:
D R
=
@2g
@x @x
1 @
2 @x
@2g
@x @x
@2g
@2g
+
@x @x
@x @x
E, permutando os índices
D R
+D R
+D R
=0
Conhecida como identidades de Bianchi.
Usando as identidades de Bianchi e o fato da conexão ser compatível com a métrica podemos multiplicar
a expressão acima por g temos:
D R
D R
+g
D R
=0
multiplicando por g
D R
2g
D R
=
0
D R
2g
D R
=
0
D [g
2g
g
R
D
R
D
R
2g R ] = 0
1
g R
= 0
2
1
g R
= 0
2
Comparando com (99)
c1 = 1 ; c2 =
ou
G
=R
1
2
1
g R
2
chamado tensor de Einstein. Voltando em (97)
R
1
g R=
2
Esta é a equação de Einstein para a gravitação.
188
8 G
T
c3
;
(100)
Para veri…car isso, primeiro multiplicamos a expressão acima por g
R
1
4R
2
=
R
=
8 G
T ; T =T
c3
8 G
T
c3
substituindo novamente em (100):
R
=
8 G 1
g T
c3 2
T
que nada mais é que a mesma forma de escrever a equação anterior. Da expressão acima, estamos interessados
no termo
8 G 1
g00 T T00
R00 = 3
c
2
Lembrando agora que na nossa aproximação de campo fraco temos
g00 =
00
+ h00 =
1 + h00 ; h00 << 1 :
E que, para campos fracos, ou um referencial que se move com o corpo no campo o único termo signi…cativo
é T00 (pois a energia de repouso é muito maior que a cinética), podemos fazer
T =g T
' g00 T 00 '
T 00 =
T00
com isso
R00
=
R00
'
8 G 1
g00 T
c3 2
18 G
T00
2 c3
8 G 1
( 1) ( T00 )
c3 2
T00 '
T00
Vamos agora avaliar
R00 = g
R
como, pela anti-simetria do tensor de curvatura R0
0 0
000
=R
0 0
= 0, temos
R00 = Ri
0i0
Usando
Ri
0j0
= @0
i
j0
@j
i
00
+
i
0
j0
i
j
00
podemos ver que, para o nosso sistema com campos fracos todos os termos da conexão são pequenos. Assim,
mantendo apenas termos de primeira ordem na conexão, podemos abandonar os últimos dois termos da
189
expressão acima. Além disso, sendo nosso campo estático, @0
Ri
0j0
'
@j
i
00
) Ri
0i0
'
@i
i
00
=
@i
i
j0
= 0,
1 i
g (@0 g
2
0
+ @0 g0
@ g00 )
para campos estáticos
Ri
0i0
= R00 ' @i
1 ij
g (@j g00 )
2
mantendo termos de primeira ordem em h
R00 ' @i
1
2
ij
(@j g00 ) = @i
1
2
ij
(@j g00 ) =
1 2
r g00
2
com somatória nos i, com isso
R00 '
8 G1
T00 ) r2 g00 '
c3 2
8 G
T00
c3
Que concorda com a nossa expressão (96).
A equação de Einstein nos diz exatamente como a distribuição de energia (matéria mais radiação) in‡uência na curvatura e, conseqüentemente, na geometria do universo. É desta equação que desenvolvemos a
(grande) maioria das teorias cosmológicas.
Esta equação é, obviamente, di…cílima de resolver. Entretanto, fazendo algumas suposições sobre a
simetria da métrica, e.g., homogêneo e isotrópica, é possível encontrar algumas soluções desta equação. Estas
soluções podem ser usadas, por exemplo, para calcular a deformação da geometria em torno de uma estrela
(o sol) e o conseqüente desvio de um sinal luminoso nesta geometria. Ou ainda a deformação na orbita dos
planetas comparada com a gravitação de Newton. Estes cálculos foram feitos e usados para con…rmar a
validade da teoria de Einstein.
Deforma geral, a aplicação desta equação exige considerações sobre a estrutura geral do universo (pressão
nula, distribuição rarefeita de matéria). Entretanto, nenhuma destas considerações parece estar de acordo
com as previsões em larga escala (cosmológicas) do nosso universo. Por isso, novas teorias estão sendo
analisados, com a proposta de novos tipos de matéria, teorias com torção etc. Esta discrepância entre a
teoria de Einstein e as observações cosmologias é, provavelmente, uma das novas “nuvens negras da física”.
A
A.1
Noções de cálculo vetorial
Campo vetorial
Um campo vetorial num plano é uma função que a cada ponto deste plano associa um vetor. Tal campo pode
ser usado, por exemplo, para descrever o comportamento de um ‡uido, um campo eletromagnético etc. Em
190
Figure 14: Figura 1
coordenadas cartesianas um campo F pode ser dado por suas componentes
F (x; y; x) = Fx (x; y; x) x
^ + Fy (x; y; x) y
^ + Fz (x; y; x) ^
z:
Por exemplo, campo
F = (3x
y) i + (x + 5y) j
que tem a forma
A.2
Fluxo
Um conceito importante no estudo da dinâmica de um ‡uido é o conceito de ‡uxo através de uma área.
Imagine um pequeno quadrado inserido dentro de um ‡uido. Obviamente o ‡uxo através deste quadrado
depende da orientação do quadrado. Se ele for colocado com a sua normal paralelo a velocidade o ‡uxo, i.e.,
a quantidade de ‡uído por unidade de tempo que atravessa este quadrado vale
=
1
(v:dt:a) = v:a
dt
enquanto se ele for colocado perpendicular a velocidade do ‡uido não haverá ‡uxo. Este resultado pode ser
resumido como
= F:a: cos = F:a
Obsreve que o ‡uxo através de uma área é um escalar.
Imagine agora que você deseja calcular o ‡uxo através de uma superfície fechada (um balão). Para fazer
191
isso podemos primeiro dividir esta superfície em vários quadradinhos e usar o conceito acima para calcular o
‡uxo através de cada um destes quadrados. Como queremos saber se há ‡uido entrando ou saindo do balão,
damos um valor positivo para a normal de cada área que aponta para fora do balão e negativo para a que
aponta pra dentro. Chamamos isso de orientar as áreas.
Figura retirada do Simmons, Cálculo com Geometria Analítica
O ‡uxo total pelo balão será
=
X
F: ai
Z
F:da
i
No limite de ai ! 0, temos
=
esta é uma integral de superfície de um campo vetorial F . Ou seja, a integral de superfície de F sobre uma
superfície S signi…ca apenas dividir S em pequenas partes, cada uma representada por um vetor orientado
para fora de S e tomar o produto escalar desta área com o valor de F no local.
A.3
Divergente
Nosso objetivo aqui é estudar características locais, ou pontuais, do nosso ‡uido. Em outras palavras,
queremos de…nir quantidades como as densidades dos corpos extensos (densidade de carga, de massa etc).
Para uma superfície qualquer …nita do nosso campo temos um ‡uxo, nosso objetivo aqui é obter um densidade
de ‡uxo, ou seja, um ‡uxo por unidade de volume. A partir desta quantidade, como no caso da densidade
de massa, podemos tanto obter o ‡uxo de superfícies …nitas, quanto conhecer características locais do ‡uido.
Isso nos permitirá também caracterizar o movimento do ‡uído.
Imagine uma superfície qualquer S e o ‡uxo (Figura 3-a)
=
Z
F:da
S
Agora divida esta superfície em duas partes: S1 e S2 (Figura 3-b) teremos então dois ‡uxos
i
=
Z
Si
192
F:da
Figure 15: Figura 3 - Figura retirada do Curso de Física Berkeley –Vol.2 –Eletromagnetismo
O ponto importante aqui é que o ‡uxo pela interface entre as superfícies tem o mesmo valor e sinal contrário
(pois é orientado para fora de cada uma delas) de sorte que
=
1
+
2
E isso é verdade para qualquer divisão que façamos da superfície. Vamos agora dividir esta superfície em
N superfície bem pequenas Si (Figura 3-c), pelo motivo descrito acima temos
N Z
X
i=1
F:da =
Z
F:da =
S
Si
Ou seja, a soma do ‡uxo por cada superfície do balão é igual ao ‡uxo total pelo balão (Figura 3-d).
Nosso interesse é identi…car alguma característica do ‡uido relacionado com o limite quando N cresce
enormemente. Observe que a integral
Z
i
=
F:da
Si
não pode ser tomada como esta característica porque ela depende das divisões do volume, i.e., se dividirmos
o volume no meio i também cai pela metade e, além disso, certamente i ! 0 quando Si ! 0. Podemos
193
entretanto obter uma quantidade …nita que não dependa do volume se tomarmos
R
Si
F:da
Vi
onde Vi é o volume dentro da área Si . Uma vez que Vi ! 0 quando Si ! 0 a quantidade acima pode tender
a um valor …nito que, conseqüentemente, caracterizará o comportamento do ‡uido em torno de um ponto
qualquer. A quantidade acima, no limite de Vi ! 0 se chama o divergente do campo F
1
divF = lim
Vi !0 Vi
Z
F:da
Si
onde Si é uma superfície que envolve Vi .
Assim, o divergente de F é o ‡uxo que sai de Vi , por unidade de volume, para um volume in…nitesimal.´
O divergente é uma grandeza escalar que pode variar de ponto a ponto e seu valor num determinado
ponto (x; y; z) é a integral acima com o ponto no interior de Vi .
O divergente está relacionado com quanto de ‡uido entra (ou sai) de um volume, seja pela criação (ou
absorção) deste ‡uido, seja pela sua compressão.
A.3.1
Teorema de Gauss
Uma vez conhecido o divergente de uma função, podemos refazer o processo descrito acima, no sentido
inverso, e calcular o ‡uxo de F numa superfície …nita S
Z
F:da =
S
N Z
X
lim
Vi !0
N
X
1
Vi
i=1
Com isso temos
Z
S
F:da =
Si
i=1
No limite Vi ! 0 temos
N
X
Z
1
Vi
i=1
F:da :Vi =
Z
Z
F:da Vi
Si
divF dV
V
Si
F:da =
Z
divF dV
V
Este é o teorema da divergência.
Se o TD é válido para qualquer campo vetorial, certamente também é válido para o campo elétrico. Da
lei de Gauss (que é uma conseqüência da lei de Coulomb) temos
Z
Q
E:da =
=
"
0
S
194
Z
V
"0
dV
Figure 16: Figua 4 - Figura retirada do Curso de Física Berkeley –Vol.2 –Eletromagnetismo
usando o TD temos
Z
S
E:da =
Z
divE dV =
V
Z
V
"0
dV
O resultado acima tem de ser válido para qualquer volume. Isso só é possível se os integrandos forem iguais
em qualquer ponto
divE =
"0
A.3.2
O divergente em coordenadas cartesianas
A de…nição acima independe de qualquer sistema de coordenadas. Entretanto, para efetivamente efetuamos
alguma conta, precisamos ter uma forma prática para determinar o divergente de algum campo F. Para isso
fazemos F = F (x; y; x) o que signi…ca que introduzimos algum sistema de coordenadas no espaço. Se este
sistema é cartesiano o campo vetorial F pode ser decomposto em 3 funções escalares:
F (x; y; x) = Fx (x; y; x) x
^ + Fy (x; y; x) y^ + Fz (x; y; x) z^
Vamos calcular o ‡uxo desta função por um cubinho de ladp x; y; z (Figura 4-a)
Para a face superior e inferior (Figura 4-b) temos os vetores x y^
z e x y( ^
z). Assim, quando …zemos
o produto escalar de F com estas áreas, apenas a função Fz sobreviverá. Ou seja, o ‡uxo é a diferença entre
o valor médio (no ponto médio das superfícies) de Fz nas faces interiores e superiores. Em primeira ordem
de aproximação esta diferença vale
@Fz
z:
@z
195
O valor médio da função na face inferior vale (Figura 4-b)
Fz (x; y; x) +
@Fz x @Fz y
+
:
@x 2
@y 2
Já o valor médio da função na face superior vale (Figura 4-b)
Fz (x; y; x) +
@Fz
@z
@Fz x @Fz y
+
:
@x 2
@y 2
z+
Assim, o ‡uxo na direção z vale
@Fz
@Fz x @Fz y
z+
+
@z
@x 2
@y 2
@Fz x @Fz y
+
Fz (x; y; x) +
x y
@x 2
@y 2
@Fz
z x y
=
@z
Fz (x; y; x) +
x y
Da mesma forma, os ‡uxos nas demais direções valem
@Fx
@x
z x y;
@Fy
@y
z x y
De sorte que o ‡uxo total vale
@Fy
@Fz
@Fx
+
+
@x
@y
@z
=
z x y
pela nossa de…nição de divergente temos
@Fx
@Fy
@Fz
+
+
@x
@y
@z
@Fx
@Fy
@Fz
=
+
+
@x
@y
@z
divF = lim
V !0
1
V
=
z x y
V
Assim, em coordenadas cartesianas:
divF =
A.4
@Fy
@Fz
@Fx
+
+
@x
@y
@z
(101)
Integrais de linha
Um dos grandes interesses no estudo de problemas práticos é saber qual o trabalho realizado para se mover
neste campo vetorial. Por exemplo, queremos mover uma carga elétrica por um campo elétrico, ou uma
massa num campo gravitacional, ou ainda um barco por um rio.
196
Em todos estes casos, o trabalho realizado será:
W =
Z
(102)
F:dr
C
onde F (x; y) = U (x; y)^{ + V (x; y) ^
| é o campo vetorial (neste caso a força) e dr = ^{dx + ^
|dy um elemento
de deslocamento na trajetória C. Em geral este trabalho depende, não apenas do caminho, mas
também do sentido que este caminho é seguido.
Exemplo: Vamos calcular a integral de linha do campo (cujo grá…co é apresentado na Figura 1)
F = (3x
y) i + (x + 5y) j
sobre a circunferência unitária. Este caminho pode ser parametrizado como
x = cos !t ; y = sin !t ; t 2 0;
2
!
onde ! está relacionado com a velocidade que percorremos a curva. Assim
W =
Z
F:dr =
C
Z
(U (x; y) dx + V (x; y) dy)
C
dy
dx
dt ; dy =
dt ;
x = x (t) ; y = y (t) =) dx =
dt
dt
Z 2!
dy
dx
+ (x + 5y)
W=
(3x y)
dt
dt
dt
0
dy
dx
= ! sin !t ;
= ! cos !t
dt
dt
2
Z !
W=
((3 cos !t sin !t) ( ! sin !t) + (cos !t + 5 sin !t) (! cos !t)) dt
0
Z 2!
(( 3 + 5) sin !t cos !t + 1) dt = !
(2 sin !t cos !t + 1) dt
0
!
!
Z 2!
Z 2!
1
2
2
=! 2
sin 2!t dt +
=! 2
sin !t cos !tdt +
!
2
!
0
0
!
!
Z 2!
2 =!
2
1
2
=!
sin 2!t dt +
=!
cos 2!t
+
!
2!
!
0
0
=!
=!
Z
2
!
=2 :
Observe como o valor calculado não depende de !, a velocidade com que percorremos a curva.
197
Figure 17: Figura 5 -Figura retirada do Curso de Física Berkeley –Vol.2 –Eletromagnetismo
A.5
O rotacional de uma função
O divergente nos fala sobre o ‡uxo em torno de um ponto do ‡uido, o que, obviamente, está relacionado
com pontos onde surge ou desaparece ‡uido, i.e., fontes ou sorvedouros. Ou ainda pontos onde o ‡uido possa
ser comprimido. Entretanto, é possível que haja movimento num ‡uido mesmo que nenhum destes efeitos
ocorra. Por exemplo, você pode fazer circular um ‡uido num balde. Isso cria rodamoinhos no ‡uído.
Este tipo de movimento tem a característica de exigir que realizemos trabalho para mover um corpo
através de um circuito fechado do campo (ou do ‡uído). E pode ser medido através da integral
=
Z
F:ds
C
Esta quantidade é chamada circuitação (ou circulação) do campo.
Precisamos orientar o caminho. Fazemos isso exigindo que a parte interna …que sempre a nossa esquerda
(Figura 5-a).
Dado um circuito qualquer C (Figura 6-a) podemos dividi-lo em 2 partes C1 e C2 (Figura 6 -b). Uma
vez que a interface entre os dois caminhos é percorrida no sentido contrário (Figura 6-b) temos
1
+
2
=
O mesmo pode se obtido dividindo o circuito em N partes (Figura 6-c)
=
N
X
i
i=1
Mais uma vez, estamos interessados numa quantidade característica do ‡uido, relacionado com seu compor-
198
Figure 18: Figura 6 -Figura retirada do Curso de Física Berkeley –Vol.2 –Eletromagnetismo
Figure 19: Figura retirada do Simmons, Cálculo com Geometria Analítica
tamento em cada ponto. Novamente, esta quantidade não é a circuitação, pois, se ai é a área encerrada pelo
caminho Ci , temos Ci ! 0 quando ai ! 0. Mas, assim como no caso do divergente, podemos esperar uma
quantidade …nita fazendo
R
F:ds
i
= Ci
ai
ai
Diferente do divergente a circuitação acima depende da orientação da normal da superfície in…nitesimal
Ci . Para uma circuitação in…nitesimal com área ai na direção n
^ temos
(rotF ) n
^ = lim
ai !0
R
Ci
F:ds
ai
n
^
Ou seja, se o circuito Ci tem uma área ai na direção x então estamos calculando a componente do rotacional
na direção x. A quantidade acima é chamada rotacional do ‡uido e mede a circuitação, por unidade de área,
em torno de um ponto do campo. O divergente é um vetor.
Fisicamente o rotacional de um ‡uido poderia ser medido com um dispositivo como o da …gura abaixo:
199
A.5.1
Teorema de Stokes
Partindo do rotacional podemos obter a circuitação de um contorno …nito C
=
Z
F:ds =
C
N Z
X
Ci
i
Usando a de…nição de rotacional
1
ai
lim
ai !0
e, neste limite
Z
F:ds =
Z
F:ds = (rotF ) n
^
Ci
F:ds =
C
Ou, como n está na direção de a
Z
N
X
1
F:ds ai
ai Ci
i
Z
[(rotF) n
^ ] da
S
Z
F:ds =
C
Z
(rotF) da
(103)
S
Este é o teorema de Stokes e relaciona a integral de linha do campo através de um circuito fechado com a
integral de área do rotacional.
Um ponto importante a se notas é que existem várias áreas diferentes que possuem a mesma fronteira
(como quando se esta sobrando uma bola de sabão). Então qual área selecionamos para aplicar o Teorema de
Stokes? Note, entretanto, que o lado esquerdo de (103) não depende de qual área escolhemos. Isso signi…ca
que o lado direito também não irá depender. Ou seja, para aplicar o Teorema de Stokes podemos usar
qualquer área que tenha a curva como borda. O que nos permite anunciar o seguinte:
Corollary 86
R
S
(rotF) da depende apenas da fronteira da superfície S e não da superfície em particular.
Do corolário acima, temos que se …zermos a borda da fronteira diminuir, de forma que C ! 0, o lado
esquerdo de (103) vai à zero. Com o que temos
Corollary 87 para qualquer superfície fechada
I
(rotF) da = 0 :
S
A.5.2
Lei de Ampère
Uma corrente induz um campo magnético B
I
B:dl =
C
200
0I
(104)
Figure 20: Figura retirada do Curso de Física Berkeley –Vol.2 –Eletromagnetismo
onde I é toda a corrente que passa no interior do circuito C. Esta corrente pode ser escrita como
I=
Z
J da
S
onde J é a densidade de corrente e S qualquer superfície limitada pela curva fechada C. Com isso
I
B:dl =
C
Usando o teorema de Stokes
I
C
B:dl =
Z
Z
J da
S
(rotB) da =
S
0
Z
J da
S
Para qualquer curva C, o que só pode ser verdade se
rotB =
0J
Que é a lei de Ampère.
Um mecanismo para medir o rotacional de um campo eletromagnético poderia ter a seguinte forma:
A.5.3
Rotacional em coordenadas cartesianas
Novamente a de…nição acima, apesar de geral, é pouco prática para o cálculo do rotacional conhecendo-se
o campo. Vamos então obter uma expressão que permita determinar esta quantidade uma vez conhecida as
201
Figure 21: Figura 7 - Figura retirada do Curso de Física Berkeley –Vol.2 –Eletromagnetismo
componentes cartesianas do campo.
Seja então F (x; y; z) = Fx x
^ + Fy y
^ + Fz ^
z um campo de…nido num sistema cartesiano de unidades. Vamos
calcular a circuitação do campo F por um elemento quadrado de lado x e y.
Para isso, imaginando que os lados são in…nitesimais, podemos aproxima a integral de linha simplesmente
pelo produto (escalar) do valor do campo no meio do percurso pelo comprimento do percurso. Assim, para
os percursos horizontais temos
Z
F:dl =Fx (xm ; ym ; zm ) x
x
Onde Fx (xm ; ym ; zm ) é o valor do campo no meio do intervalo. Na parte inferior
@Fx x
Fax (xm ; ym ; zm ) = Fx (x; y; z) +
@x 2
Z
@Fx x
F:dl = Fx (x; y; z) +
x
@x 2
x
Enquanto na parte superior
@Fx x @Fx y
Fbx (xm ; ym ; zm ) = Fx (x; y; z) +
+
@x 2
@y 2
Z
@Fx x @Fx
F:dl =
Fx (x; y; z) +
+
y
x
@x 2
@y
x
onde o sinal de menos vem do fato do percurso ser feito na direção de
verticais temos
Z
F:dl =Fy (xm ; ym ; zm ) y
y
202
x
^ (F:dl =Fx ( dx)).Para os lados
Na parte esquerda
@Fy y
Fcy (xm ; ym ; zm ) = Fy (x; y; z) +
@y 2
Z
@Fy y
F:dl=
Fy (x; y; z) +
@y 2
y
y
enquanto na direita
@Fy
Fdy (xm ; ym ; zm ) = Fy (x; y; z) +
@y
Z
@Fy y
+
F:dl = Fy (x; y; z) +
@y 2
y
y @Fx
+
x
2
@x
@Fy x
y
@x 2
Com isso a nossa circuitação se torna
Z
C
Tomando o limote
lim
a!0
Como obviamente a área
R
C
@Fx
@x
@Fx
Fx (x; y; z) +
@x
@Fy
Fy (x; y; z) +
@y
@Fy
+ Fy (x; y; z) +
@y
@Fx
@Fy
x
=
@x
@y
F:dl= Fx (x; y; z) +
F:ds
=
a
lim
x; y!0
h
@Fy
@x
x
x
2
x @Fx
+
y
2
@y
y
y
2
y @Fy
+
x
2
@x
@Fx
@y
x
y
y
i
x y
x y
=
@Fy
@x
@Fx
@y
x y aponta na direção ^
z (Figura 7) esta é a componente z do rotacional
(rotF) ^
z=
@Fy
@x
@Fx
^
z
@y
Efetuando o mesmo procedimento para os contornos da Figura 8 temos
@Fz
@y
@Fx
(rotF) y
^=
@z
(rotF) x
^=
203
@Fy
x
^
@z
@Fz
y
^
@x
Figure 22: Figura 8 - Figura retirada do Curso de Física Berkeley –Vol.2 –Eletromagnetismo
Ou, juntando todas as componentes
rotF =
@Fz
@y
@Fx
@Fy
x
^+
@z
@z
@Fy
@Fz
y
^+
@x
@x
@Fx
^
z
@y
(105)
A expressão acima permite calcular o vetor rotacional conhecendo-se as componentes cartesianas do campo.
A.6
O operador Nabla
Existe uma forma bastante conveniente de se expressar a equação (101) e (105). Para isso introduzimos o
operador vetorial
@
@
@
+y
^
+^
z
(106)
O=x
^
@x
@y
@z
chamado de nabla. A quantidade acima é um operador diferencial, ou seja, ele só fornece um valor quando
aplicado em alguma função. Por exemplo, quando aplicado na função g (x; y; z) temos
Og = x
^
@g
@g
@g
+y
^
+^
z
@x
@y
@z
onde agora cada uma das componentes do vetor é um número que depende do ponto (x; y; z), ou seja, o
operador nabla permitiu contruir um vetor (Og) a partir de uma função escalar (g). Este vetor se chama o
gradiente da função. O gradiente de uma função é um vetor que aponta sempre na direção em que a função
cresce mais rapidamente com a variação dos parâmetros.
O que acontece quando aplicamos o operador nabla num campo vetorial F? Neste caso, como ambos são
vetores, podemos de…nir a palavra “aplicar” como um produto escalar ou um produto vetorial.
204
Se usarmos o produto escalar temos
@
@
@
+y
^
+^
z
@x
@y
@z
@Fx
@Fy
@Fz
=
+
+
@x
@y
@z
O F= x
^
(Fx x
^ + Fy y
^ + Fz ^
z)
Que podemos reconhecer como o divergente do campo (101). Se escolhermos de…nir a aplicação pelo produto
vetorial temos
O
F=
=
x
^
y
^
^
z
@
@x
@
@y
@
@z
Fx
Fy
Fz
@Fz
@y
@Fy
@Fx
x
^+
@z
@z
@Fz
@Fy
y
^+
@x
@x
@Fx
^
z
@y
Que podemos reconhecer como o rotacional do campo.
É importante notar que apesar de sempre usarmos:
Og
gradiente de g
OF
divergente de F
F
rotacional de F
O
este operador só tem a forma (106) acima em coordenadas cartesianas.
Além disso, em coordenadas cartesianas, podemos ainda de…nir:
x1
x ; x2
y ; x3
@1 ;
@
@
=
@y
@x2
z
com o que
@
@
=
@x
@x1
@2 ;
@
@
=
@z
@x3
@3
Usando estas de…nições temos
(Og) x
^i = @i g
OF=
3
X
@i Fi
@i Fi
i=1
(O
F) x
^i = @j Fk
@k Fj com 1 ! 2 ! 3
onde no ultimo caso as componentes i; j; k (nesta ordem) devem seguir a ordem cíclica i = 1; j = 2; k = 3 !
205
i = 2; j = 3; k = 1 ! i = 3; j = 1; k = 2. Uma forma muito prática (e útil) de evitarmos ter de deixar
sempre indicado esta ordem cíclica é usarmos o chamado tensor completamente anti-simétrico de Levi-Civita,
ou símbolo de Levi-Civita
"ijk
que é anti-simétrico nas três componentes
"ijk =
"jik =
"ikj
com
"123 = 1
Como conseqüência esta quantidade vale zero se os índices se repetem (e.g, "112 = 0), muda de sinal para
qualquer permutação de dois índices e mantém o sinal para permutações cíclicas. Estas propriedades podem
ser expressas na igualdade
(i j) (j k) (k i)
"ijk =
; i; j; k = 1; 2; 3 :
2
Usando esta quantidade, podemos de…nir a componente i do rotacional como
(O
F) x
^i =
3
X
"ijk @j Fk
"ijk @j Fk
j;k=1
Vamos calcular, por exemplo, o rotacional do gradiente de uma função
O
(Og) = "ijk @j (@k g) = "ijk @j @k g
1
= ("ijk + "ijk ) @j @k g
2
1
= ("ijk "ikj ) @j @k g
4
1
= ("ijk @j @k g "ikj @j @k g)
4
Lembrando agora que j e k são índices mudos
O
1
("imn @m @n g "imn @n @m g)
4
1
= "imn (@m @n @n @m ) g
4
(Og) =
Usando agora
@n @m = @m @n
206
temos33
1
"imn (@m @n
4
1
= "imn (@m @n
4
=0
O
(Og) =
@n @m ) g
@m @n ) g
ou seja, o rotacional do gradiente é sempre igual a zero.
O símbolo de Levi-Civita se relaciona com o delta de Kronecker através do determinante34
"ijk "lmn =
il
im
in
jl
jm
jn
kl
km
kn
:
Exercise 88 Usando o mesmo procedimento acima, mostre que o divergente do rotacional é sempre nulo.
Exercise 89 Mostre que
"ijk "mnk =
im jn
in jm
Exercise 90 Usando a propriedade do exercício acima, mostre que
O
(O
F) = O (O F )
O2
A.7
O2 F
O O = @i @i
Teoremas Fundamentais do Cálculo Vetorial
Voltando aos nossos teoremas (agora com o operador nabla) temos
Z
Z
S
V
r F dV =
r
F da =
I
F da (T. da divergência)
S
I
F ds (T. de Stokes)
C
O primeiro relaciona um volume com a sua fronteita, i.e., uma área. O segundo relaciona uma área com
a sua fronteira, i.e., um caminho. Cada um deles diminui de 1 a dimensão do problema. Sabendo que a
dimensão mínima que podemos chegar é o ponto, será que podemos diminuir ainda mais a dimensão do nosso
problema? Em outras palavras, existe alguma relação entre as extreminades de um camilho (uma linha) e a
sua fronteira (dois pontos)? A resposta é sim.
33 O
produto escalar de um tensor simétrico com um anti-simétrico é sempre nulo.
o livro de Teoria do Campo do Landau.
3 4 Veja
207
Relação entre as extremidades de uma linha
@T
@T
@T
dx +
dy +
dz
@x
@y
@z
@T
@T
@T
x
^+
y
^+
^
z (dx x
^ + dy y
^ + dz ^
z)
=
@x
@y
@z
dT =
= (rT ) ds
0
T = T (P )
T (P ) =
Z
(rT ) ds
C
onde C é um caminho que inicia em P e termina em P 0 . Assim
Z
(rT ) ds =T (P 0 )
T (P )
C
É importante notar que existem vários caminhos que permiter ligar estes dois pontos. Entretanto, o lado
direito da expressão assima não depende do caminho. Ou seja
Se F é o gradiente de alguma função (F =rT ) então a integral de caminho de F só depende dois pontos
iniciais e …nais. Chamamos um campo com esta característica de conservativo.
Como consequencia do resultado acima temos
I
(rT ) ds =0 :
C
Mais ainda, como
r
(rT ) = 0
Vemos que todo campo conservativo tem rotacional nulo. É possivem mostrar que o contrário também é
verdade.
I
Z
(rT ) ds = r (rT ) da = 0
C
S
Como isso tem de ser válido para qualquer área
r
(rT ) = 0
Para uma área fechada (sem borda) temos (104)
I
S
r
F da =
I
C
208
F ds = 0
Aplicando o teorema do divergente
I
(r
F) da =
S
Z
r (r
V
F) dV = 0
Como isso é válido para qualquer volume
r (r
A.8
F) = 0 :
Teorema de Green
Vamos calcular a integral
W =
Z
F:dr
C
para um campo F arbitrário, mas para um caminho especí…co, por exemplo, um retângulo:
(0; 0) ! (a; 0) ! (a; b) ! (0; b) ! (0; 0)
Z
Z
W =
F:dr =
(U (x; y)^{ + V (x; y) ^
|) : (^{dx + ^
|dy)
C
ZC
=
(U (x; y) dx + V (x; y) dy) :
C
Na primeira parte do caminho (0; 0) ! (a; 0) ; dr = ^{dx =) dy = 0:
(a;0)
W j(0;0) =
Z
(a;0)
(U (x; y) dx + V (x; y) dy) =
(0;0)
Z
a
U (x; 0) dx
0
Enquanto na segunda parte (a; 0) ! (a; b) ; dr = ^
|dy =) dx = 0
(a;b)
W j(a;0) =
Z
(a;b)
(U (x; y) dx + V (x; y) dy) =
(a;0)
Z
b
V (a; y) dy
0
Da mesma forma
(0;b)
W j(a;b) =
(0;0)
W j(0;b)
=
Z
0
U (x; y) dx =
a
Z
0
V (x; y) dy =
b
Z
Z
U (x; b) dx
0
0
209
a
b
V (0; y) dy
O trabalho total é a soma do trabalho de cada parte:
(a;0)
(a;b)
(0;b)
(0;0)
W = W j(0;0) + W j(a;0) + W j(a;b) + W j(0;b)
Z b
Z a
[V (a; y)
[U (x; 0) U (x; b)] dx +
=
V (0; y)] dy
(107)
0
0
Um ponto importante é que cada uma das integrais acima é uma integral ordinária em apenas uma
variável. Assim, no cálculo de qualquer das integrais acima a função integrada pode ser tratada como uma
função de uma única variável. Assim, podemos fazer, por exemplo:
dfx (y)
U (x; y) = fx (y) =) fx (y) =
=)
dy
0
fx (y + dy)
dfx
= lim
dy*0
dy
dy
0
fx (y) =
Z
b
0
fx (y) dy = fx (b)
f (y)
fx (0) =)
Z
b
a
fx (0)
0
U (x; y + dy)
dy
@U
dy = U (x; b)
@y
@V
dx = V (a; y)
@x
0
0
fx (y) dy = fx (b)
dy*0
0
Z
b
= lim
0
Da mesma forma
Z
U (x; y)
=
@U
@y
U (x; 0)
V (0; y)
Substituindo em (107) temos
W =
=
Z
Z
0
a
0
a
Z
Z
b
0
b
0
@U
dy dx +
@y
@V
@x
Z
b
0
Z
a
0
@V
dx dy
@x
@U
dx dy
@y
Assim, para o nosso caminho quadrado
W =
Z
C
F:dr =
Z
(U (x; y) dx + V (x; y) dy) =
C
Z Z
@V
@x
@U
@y
dA
R
Suponha agora que o nosso quadrado tenha sido dividido, por exemplo, por uma linha vertical no ponto
x = h < a e calculamos o trabalho para percorrer cada um dos dois quadrados:
(h;0)
(h;b)
(0;b)
(0;0)
(a;0)
(a;b)
(h;b)
(h;0)
W1 = W(0;0) + W(h;0) + W(h;b) + W(0;b)
W2 = W(h;0) + W(a;0) + W(a;b) + W(h;b)
210
onde
(h;b)
W(h;0) =
(h;0)
W(h;b) =
Z
b
V (h; y) dy
0
Z
Z
0
V (h; y) dy =
b
b
V (h; y) dy =
0
(h;b)
W(h;0)
Então
(h;0)
(0;b)
(0;0)
(a;0)
(a;b)
(h;b)
W1 + W2 = W(0;0) + W(h;b) + W(0;b) + W(h;0) + W(a;0) + W(a;b)
Agora observamos que
(h;0)
W(0;0)
(h;b)
+
(a;0)
W(h;0)
=
(0;b)
Z
h
U (x; 0) dx +
Z
a
U (x; 0) dx =
0
h
0
(0;b)
Z
a
(a;0)
U (x; 0) dx = W(0;0)
W(a;b) + W(h;b) = W(a;b)
Assim
(a;0)
(a;b)
(0;b)
(0;0)
W1 + W2 = W j(0;0) + W j(a;0) + W j(a;b) + W j(0;b) = W
Ou seja, não importa que divisão façamos no nosso quadrado todas as contribuições das partes internas irão
se cancelar (porque são percorridas na ordem inversa) e sobrará apenas as bordas.
Assim, para uma superfície fechada qualquer, podemos subdividi-la em quadrados, somar todas as contribuições dos quadrados e o que teremos será a integral de linha nas bordas da região interna do caminho.
É importante notar que qualquer buraco na nossa área, i.e., regiões que não pertencem ao
domínio das funções geraram bordas e contribuirão para a integral.
Assim, de forma geral, para um caminho fechado que encerre uma superfície simplesmente conexa (sem
buracos) temos:
I
I
Z Z
@V
@U
F:dr =
(U (x; y) dx + V (x; y) dy) =
dA
(108)
@x
@y
C
C
R
Este é o teorema de Green e permite, através do cálculo de integrais de áreas, que não envolve produtos
vetoriais, calcular uma integral de linha.
Exemplo: Vamos voltar ao nosso exemplo anterior
F = (3x
y) i + (x + 5y) j
U = (3x
y) ; V = (x + 5y)
@U
@V
= 1;
=
@x
@y
I
C
Z Z
F:dr =
R
@V
@x
@U
@y
dA =
1
Z Z
R
211
Z Z
[1 + 1] dA = 2
dA = 2 :
R
Este teorema também permite ver que, se
@V
@U
=
=)
@x
@y
I
F:dr =0 ;
C
para qualquer curva fechada. Ou seja, F é um campo conservativo. Veja que esta expressão concorda com
(??) que obtivemos porque F é um campo gradiente.
Se F é um campo conservativo temos
Z
Z
@f
@f
@f
@f
F = rf =
x
^+
y
^ =)
F:dr =
x
^+
y
^ : (^{dx + ^
|dy)
@x
@y
@x
@y
C
C
Z
Z
Z
@f
@f
dx +
dy =
F:dr=
df = f (B) f (A)
@x
@y
C
C
C
para A e B os limites de C. Assim
Z
C
rf:dr =f (B)
f (A)
é uma generalização do Teorema Fundamental do Cálculo para funções de várias variáveis.
212
")