Influência do torque residual na deriva do eixo de rotação
de satélites artificiais em órbitas circulares
Maria Cecília Zanardi ,
Sheila Crisley de Assis, Isaura M. P. Quirelli
Grupo de Planetologia e Dinâmica da UNESP, Depto de Matemática, FEG/UNESP
12516-410, Guaratinguetá, SP
E-mail: [email protected]
Hélio Koiti Kuga
INPE, São José dos Campos,SP
E-mail: [email protected]
Introdução
O objetivo principal deste trabalho é apresentar a
influência do torque magnético residual no
movimento do eixo de rotação de um satélite
artificial. Na análise é considerado o satélite
estabilizado por rotação em órbita circular e
componentes médias do torque residual para um
período orbital. O modelo de quadripolo é utilizado
para descrever o campo geomagnético. A atitude do
satélite é descrita por coordenadas esféricas: o
módulo da velocidade de rotação (W) , ascensão reta
(α) e declinação (δ) do eixo de rotação do satélite.
Admite-se também que a órbita do satélite ao redor
da Terra é conhecida, dada inicialmente pela órbita
Kepleriana circular, sendo posteriormente incluídas
as principais variações devido ao achatamento da
Terra.
Soluções analíticas são apresentadas para as
equações do movimento que descrevem as variações
do módulo da velocidade de rotação, da ascensão
reta e da declinação do eixo de rotação do satélite,
sendo válidas para um período orbital.
A utilização do torque médio já inclui os
principais efeitos associados com o torque
magnético residual.
Torque Magnético Residual
O torque magnético residual ocorre devido ao
momento magnético ao longo do eixo de rotação do
satélite, contribui para uma lenta precessão do eixo
de rotação e pode ser dado por (Wertz, 1978):
r
r r
N r =m x B ,
(1)
r
r
em que B é campo magnético terrestre local e m é
a soma dos momentos magnéticos individuais do
satélite.
Quando a parcela principal do momento
magnético do satélite se alinha ao longo do eixo de
rotação, o torque magnético residual instantâneo é
obtido por:
r
r
N r = M s k̂ x B ,
(2)
em que M s é o módulo do momento magnético do
satélite ao longo do eixo de rotação, k̂ é o vetor
r
unitário ao longo do eixo de rotação do satélite , e B
é o campo magnético terrestre local
Pela Equação (2) é necessário expressar o campo
r
magnético B em um sistema fixo no satélite, aqui
denominado de sistema do satélite, de modo a
determinar as componentes do torque magnético
r
residual N r no sistema do satélite.
O Campo Geomagnético
O campo geomagnético é aqui descrito pelo
modelo de quadripolo e pode ser expresso em
termos da distância geográfica r, da co-latitude φ e
da longitude θ de um ponto no espaço, sendo
representado no sistema de coordenadas esféricas
local por (Zanardi e Real., 2003):
r
B= B r r̂ + B φ φˆ + B θ θˆ ,
(3)
com
r
B r = 2 T
r
3
r
f 1 (θ, φ) + 3 T
r
3
4
f 2 ( θ, φ) ,
4
r
r
Bφ = − T f3 (θ, φ) − T f 4 ( θ, φ) ,
r
r
3
Bθ = −
(5)
4
1 rT
r
{ f 5 (θ, φ) + T f 6 ( θ, φ) +
sen φ r
r
r
+ 2 T
r
sendo
(4)
4
f 7 (φ, θ) } ,
(6)
g10 c φ +
f1 ( θ, φ) =
(
g11 c θ
(
)
f 2 ( θ, φ) = 1,5g 02 c 2 φ − 1 +
[
+ [g
3
+ g12 c θ + h12 s θ
2
2 c 2θ
+
h11 s θ
+
]
h 22 s
3
4
2θ
)s φ ,
(7)
s 2φ +
]
3
4
(
r
B = B x î + B y ĵ + B z k̂ ,
2
s φ ,
(8)
)
(9)
f 3 (θ, φ) = −g 10 s φ + g 11 c θ + h 11 s θ c φ ,
(
f 4 (θ, φ) = −3g 02 cφsφ + g12 c θ + h12 sθ
[g
2
2 c 2θ
+ h 22 s 2θ
(
]
3
4
)
3 c 2φ +
s 2φ ,
)
f 5 (θ, φ) = - g11s θ + h11 c θ s φ ,
[
f 6 ( θ, φ) = - g12 s θ + h 22 c θ
]
f 7 (θ, φ) = { - g 22 s 2θ + h 22 c 2θ}
Como conhece-se as componentes do campo
r
magnético ( B ) no Sistema Equatorial, dados pelas
expressões (11) a (13), pode-se obter suas
componentes no Sistema de Satélite (Zanardi et
al,2003):
(10)
(17)
em que î , ĵ, k̂ são os versores do sistema do satélite.
Utilizando a matriz de rotação que relaciona o
sistema do satélite com o sistema equatorial, as
componentes do campo geomagnético no sistema do
satélite são dadas por ( Assis, 2004)
Bx = - BX senα + BY cos α ,
(18)
B y = -BX senδ cos α − BY sen δ sen α + BZ cos δ ,
(19)
(11)
3
4
s 2φ ,
(12)
s 2φ ,
(13)
3
4
com os coeficientes gaussianos g 10 , g 11 , g 22 , g 22 ,
h 11 , h 12 , h 22 obtidos de Wertz (1978), cX e sX
representando cos X e sen X respectivamente, e rT
sendo o raio equatorial da Terra.
Campo Geomagnético no Sistema
Equatorial e no Sistema do Satélite
Nas equações do movimento rotacional do
satélite em geral é necessário determinar as
componentes do campo magnético da Terra em um
sistema fixo no satélite, aqui denominado sistema do
satélite. Para determina-las, inicialmente obtém-se as
componentes do campo geomagnético no sistema
Equatorial, que são dados por (Wertz, 1978):
BX = (Br cos δ + Bφ sen δ ) cos α − Bθ sen α , (14)
BY = (Br cos δ + Bφ sen δ ) sen α − Bθ cos α ,
(15)
B Z = B r sen δ + Bφ cos δ ,
(16)
em que α e δ são a ascensão reta e a declinação do
vetor posição do satélite, respectivamente, as quais
podem ser determinadas a partir dos elementos
orbitais do satélite.
B z = -B X cos δ cos α − B Y cos δ sen α + B Z sen δ .
(20)
As componentes Bx, By e Bz serão utilizadas na
determinação do torque magnético residual.
Torque magnético Residual Médio com o
Modelo de Quadripolo
O torque residual médio é obtido através da
integração do torque magnético residual instantâneo,
dado por (2), em um período orbital (T). Considerase aqui o satélite em órbita circular, de modo que a
média pode ser desenvolvida em termos do ângulo:
w= w+υ,
(21)
sendo w o argumento do pericentro e υ a anomalia
verdadeira.
Assim o torque residual médio é dado por:
r
1 t0 + T r
1 w i + 2π r
N rm =
∫ N r dw =
∫ N r dw ,
T t0
2π w i
(22)
com w i sendo o valor do ângulo w no instante
inicial t0. Sem perda de generalidade, é aqui
considerado que w i = 0 , o que corresponde ao
satélite estar cruzando o plano do Equador.
Considerando o torque residual instantâneo, dado
por (2), efetuando o produto vetorial, com campo
r
magnético terrestre B expresso no sistema do
satélite e dado por (17), o torque residual médio é
expresso por (Zanardi et al., 2004):
[
]
r
M
N rm = S N rxm î + N rym ĵ ,
2π
(23)
sendo
2π
2π
0
0
N rxm = − ∫ B y dw e N rym = ∫ Bx dw
(24)
As integrais (23) e (24) foram desenvolvidas
com o auxilio do software MATLAB, obtendo as
componentes do campo magnético Bx e By em
termos do ângulo w , utilizando as matrizes de
rotação que relacionam os sistemas de coordenadas
envolvidos e propriedades de trigonometria esférica,
como discutido em Assis (2004) e Zanardi et
al.(2004). Após diversas manipulações algébricas, as
parcelas N rxm e N rym foram determinadas em
termos da ascensão reta e declinação do eixo de
rotação, sendo expressas por:
Equações (27), é possível observar que o torque
residual não afeta o módulo da velocidade de
rotação ( pois a componente do torque residual é
nula no eixo Oz), enquanto:
M S N rym
dδ
(28)
=
d t
2π I z W
dα
=
d t
M S N rxm
.
2π I z W cos δ
(29)
As equações (28) e (29) podem ser integradas
assumindo que que o raio orbital, a inclinação da
órbita e
a longitude do nodo ascendente
permanecem constantes durante um perídodo orbital,
do mesmo modo que a ascensão reta e declinação
(α, δ) e velocidade de rotação (W) permanecem
iguais aos valores iniciais (αo, δo, Wo). Assim as
soluções analíticas de (28) e ( 29), válidas para um
período orbital, são dadas por:
Nrxm = A sen δ cos α + B sen δ sen α − C sen δ ,
(25)
δ = k1t + δ 0 ,
(30)
Nrym = −D sen α + E cos δ ,
(26)
α = k 2t + α0 ,
(31)
com A,B,C,D e E sendo funções que dependem do
raio e da inclinação I da órbita do satélite (com
limitações até tg 6 I/2), da longitude do nodo
ascendente da órbita, do raio equatorial da Terra e
do tempo sideral. Estes termos não podem ser aqui
incluídos devido à limitações de espaço, mas estão
apresentadas em Assis (2004).
sendo
Equações do Movimento e Soluções
Analíticas
Portanto o torque residual causa a deriva e
precessão do eixo de rotação do satélite. Como as
soluções (30) e (31) são válidas para um período
orbital, os dados orbitais precisam ser atualizados a
cada período, incluindo pelo menos a influência do
achatamento da Terra. De modo similar, os valores
iniciais do módulo da velocidade de rotação, da
declinação e ascensão reta do eixo de rotação e
momento magnético do satélite podem ser
atualizados diariamente. Com esta abordagem a
solução analítica para um longo período de tempo
estará mais próxima do comportamento real da
declinação e ascensão reta do eixo de rotação do
satélite.
As variações do módulo da velocidade de rotação,
da declinação e ascensão reta do eixo de rotação são
dadas pelas equações de Euler (Wertz, 1978, Zanardi
et al., 2003) :
& = 1 N ,
W
z
Iz
δ& =
α& =
1
Ny,
Iz W
Iz
1
Nx ,
W Cos δ
(27a)
(27b)
(27c)
em que I z é o momento principal de inércia em
torno do eixo de rotação, N x , N y e N z são as
componentes dos torques externos no sistema do
r
satélite. Substituindo N rm , dado por (23), nas
k1 =
k2 =
M S N rym
2π I z Wo
M S N rxm
2π I z Wo cos δ o
(32)
(33)
Aplicações para os Satélites Brasileiros
A teoria desenvolvida pode ser aplicada para os
satélites brasileiros de coleta de dados, SCD1 e
SCD2, visto que os mesmos são estabilizados por
rotação, realizando-se a comparação entre os
resultados obtidos com
a teoria e os dados
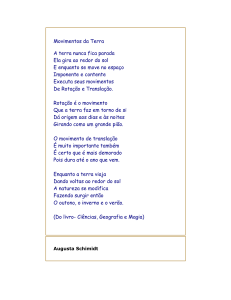
Ascensão Reta (graus)
300
280
260
Dados Calculados
Dados CCS/INPE
240
220
0
10
20
Dias
30
40
50
Figura 1 – Comportamento da ascensão reta do eixo
de rotação para o SCD1
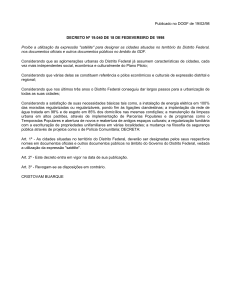
84
Declinação (graus)
fornecidos pelo Centro de Controle de satélites
(CCS) do INPE. Na aplicação da teoria, a longitude
do nodo ascendente foi atualizada a cada período
orbital dentro do propagador de atitude,
considerando as principais influências do
achatamento da Terra. Os elementos orbitais assim
como o módulo da velocidade de rotação, ascensão
reta e declinação do eixo de rotação foram
atualizados diariamente no propagador de atitude
desenvolvido, utilizando os dados fornecidos pelo
CCS/INPE.
As condições iniciais para o SCD1 foram
tomadas para 24 de julho de 1993, às 00:00:00
GMT. O comportamento da atitude do SCD1 por um
período de 40 dias está apresentado nas Figuras 1 e
2. Em comparação com os dados fornecidos pelo
CCS/INPE, a média de erro para a declinação foi de
-0,001° e para a ascensão reta apresentou um erro
médio de -1,104°.
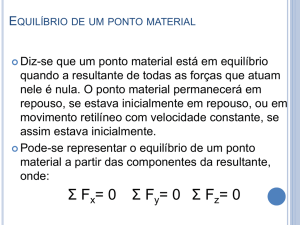
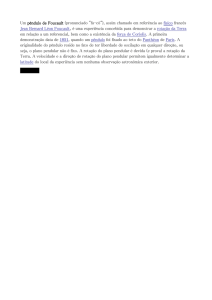
As condições iniciais para o SCD2 foram
tomadas 01 de Fevereiro de 2002, às 00:00:00 GMT.
O comportamento da atitude do SCD2 por um
período de 40 dias está apresentado nas Figuras 3 e
4. De acordo com informações do CCS/INPE, neste
período o SCD2 sofreu correções de atitude nos dias
4, 11, 23, 28, e 32, o que justifica as
descontinuidades nos gráficos. Em comparação com
os dados fornecidos pelo CCS, a média de erro para
a declinação foi de 0,042 ° e para a ascensão reta
apresentou um erro médio de 0,141°. Como o SCD2
possui controle de atitude, os erros obtidos foram
menores do que para o SCD1.
Os erros obtidos são satisfatórios e compatíveis
com as precisões requeridas para a missão,
principalmente levando em conta que a velocidade
de rotação é considerada constante no propagador de
atitude durante 24 horas, sendo atualizada apenas
diariamente.
82
80
78
Dados Calculados
Dados CCS/INPE
76
0
10
20
Dias
30
40
50
Figura2 – Comportamento da declinação do eixo de
rotação para o SCD1.
284
Ascensão Reta (graus)
280
276
272
Dados Calculados
Dados CCS/INPE
268
264
0
10
20
Dias
30
40
50
Figura 3 – Comportamento da ascensão reta do eixo
de rotação para o SCD2.
64
Referências Bibliográficas
[1] J. R. Wertz, Spacecraft attitude determination
and control, London, Reidel, ,1978.
[2] M. C. Zanardi, I. M. P. Quirelli, H. K. Kuga,
Analytical Attitude Propagation of the Spin Stalized
Earth Artifitial Satellite, Proceedings of the 17th
International Symposium of Space Flight Dynamics,
vol.2, pp. 218-227, Moscou - Rússia, 2003 .
62
Declinação (graus)
resultados concordam com os obtidos por Zanardi et
al. (2003), quando o modelo de dipolo inclinado é
considerado para o campo magnético da Terra. A
solução analítica obtida é válida ra um período
orbital. Para aplicações com longos períodos de
tempo são necessárias atualizações nos elementos
orbitais e na atitude do satélite.
A teoria foi aplicada para o satélites de coleta de
dados brasileiros, SCD1 e SCD2, apresentando uma
boa concordância entre a solução analítica e o
comportamento real da atitude de cada satélite.
Assim a abordagem aqui realizada é útil na
propagação analítica da atitude de satélites
estabilizados por rotação em órbita circular, na
presença do torque residual, e podem ser utilizados
nas análises de missão dos satélites de coleta de
dados brasileiros.
60
[3] M. C. Zanardi, F. F. Real, Torques Magnéticos
com Modelo de Dipolo e Quadripolo para o Campo
Geomagnético, Anais do DINCON 2003, v. 2, pp.
758-767, Rio de Janeiro, 2003.
58
Dados Calculados
Dados CCS/INPE
56
0
10
20
Dias
30
40
50
Figura 4 – Comportamento da declinação
do eixo de rotação para o SCD2.
Comentários Finais
Um modelo para o torque magnético
residual aplicado para satélites artificiais
estabilizados por rotação foi aqui apresentado. As
componentes médias deste torque em um sistema
fixo no satélite foram determinadas, sendo que a
teoria mostra que este torque não possui componente
ao longo do eixo de rotação do satélite ( eixo z).
Portanto, este torque não afeta a magnitude da
velocidade de rotação do satélite, mas pode causar a
deriva e a precessão do eixo de rotação. Os
[4] M. C. Zanardi, S. C. de Assis, Kuga, H. K.
Torque Magnético Residual com Modelo de
Quadripolo, Anais do DINCON 2004, CD-ROM,
pp. 1841-1851, Ilha Solteira, 2004.
[5] S. C. Assis, Propagação da Atitude de Satélites
Artificias Estabilizados por Rotação: Torque
Residual com Modelo de quadripolo para o Campo
geomagnético, Dissertação de Mestrado, FEG,
UNESP, 2004.