Programa de Pós-Graduação em Engenharia Civil
Universidade Federal de Alagoas
MODELOS CONSTITUTIVOS
Prof. Severino Pereira Cavalcanti Marques
INTRODUÇÃO À TEORIA DA PLASTICIDADE
CONCEITOS BÁSICOS
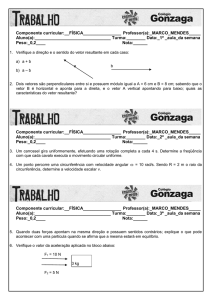
TENSOR TENSÃO E VETOR TENSÃO
σ 22
n
σ 23
P
σ 33
x2
x3
x1
σ 21
σ 12
σ 32
σ 31σ 13
σ 11
Tensor tensão
σ 11 σ 12 σ 13
σ ij = σ 21 σ 22 σ 23
σ 31 σ 32 σ 33
σ ij = σ ji
x2
A
n = vetor unitário normal ao plano ABC
~
t2
n
~
t3
x3
C
P
t1
B
x1
n1
n = n2
~
n
3
t1
n
σ~ = t 2
t
3
vetor tensão no
plano ABC
t1 σ 11 σ 12 σ 13 n1
t 2 = σ 21 σ 22 σ 23 n2
t σ
n
σ
σ
32
33 3
3 31
ti = σ ij n j
TENSÕES E DIREÇÕES PRINCIPAIS
x2
A
t = σn~
~
n
~
P
x3
B
C
σ ij − σδ ij = 0
x1
σ → escalar
vetor na direção de n~
σ ij n j − σni = 0
(σ ij − σδ ij )n j = 0
σ 11 − σ
σ 12
σ 13
σ 21
σ 22 − σ
σ 23 = 0
σ 31
σ 32
σ 33 − σ
σ = tensões principais
Tensões Principais
σ 11 − σ
σ 12
σ 13
σ 21
σ 22 − σ
σ 23 = 0
Equação característica
σ 31
σ 32
σ 33 − σ
σ − I1σ + I 2σ − I 3 = 0
3
2
I1 = σ 11 + σ 22 + σ 33
2
I 2 = σ11σ 22 + σ 22σ 33 + σ 33σ11 − σ122 − σ 23
− σ132
Invariantes
do estado de
tensão
2
I3 = σ11σ 22σ 33 − σ11σ 23
− σ 22σ132 − σ 33σ122 − 2σ12σ 23σ13
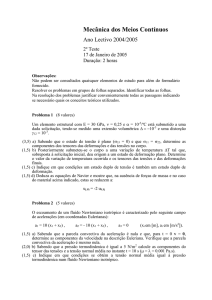
TENSOR TENSÃO DESVIADOR E TENSOR TENSÃO HIDROSTÁTICO
σ22
σm
σ21
σ12
σ23
σ32
σ31σ13
σ33
σ11
=
σm
σm
+
s23
s33
s22
s21
s32
s12
s31 s13
1
σ ij = σ kk δ ij + sij
3
1
σ ij = σ kk δ ij = tensor tensão hidrostático
3
sij = tensor de tensão desviador
s11
Estado de Tensão Hidrostático
σm
σm
σm
s23
s33
0
σ m 0
σ ij = 0 σ m 0
0
0 σ m
σm =
s22
s21
s32
s31 s13
σ 11 + σ 22 + σ 33
3
I1
=
3
Estado de Tensão Desviador
s12
s11
s11 s12 s13
sij = s21 s22 s23
s s s
31 32 33
1
sij = σ ij − σ kk δ ij
3
Estado de Cisalhamento Puro
Um estado de tensão é dito ser de cisalhamento puro se existem
eixos x1′ , x2′ e x3′ tal que
σ 1′ 1′ = σ 2′2′ = σ 3′3′ = 0
x2′
x1′
σ i′j′
x3′
0 σ 1′ 2′ σ 1′ 3′
0 σ 2′3′
= σ 2′1′
σ 3′1′ σ 3′2′
0
Condição necessária e suficiente para um estado de
tensão ser de cisalhamento puro
I1 = 0
σ ii = 0
O estado de tensão desviador corresponde a um estado
de cisalhamento puro
1
sij = σ ij − σ kk δ ij
3
σ 11 + σ 22 + σ 33
2σ 11 − σ 22 − σ 33
s11 = σ 11 −
=
3
3
σ 11 + σ 22 + σ 33 2σ 22 − σ 11 − σ 33
s22 = σ 22 −
=
3
3
s33 = σ 33 −
σ 11 + σ 22 + σ 33
3
sii = 0
2σ 33 − σ 11 − σ 22
=
3
Existem eixos x1′ , x2′ e x3′ tal que
s1′ 1′ = s 2′2′ = s3′3′ = 0
Tensões Principais do Estado de Tensão Desviador
sij − sδ ij = 0
s = tensões principais do estado de tensão desviador
Equação Característica do Estado Desviador
s − J1s − J 2 s − J 3 = 0
3
J1
J2
J3
2
s1
s2
s3
Invariantes do tensor de tensão
desviador
Invariantes do Tensor Tensão Desviador
Primeiro Invariante
J1 = s11 + s22 + s33 = s1 + s2 + s3 = 0
Segundo Invariante
1
1 2
2
2
J 2 = sij s ji = ( s11 + s22
+ s33
+ s12 s21 + s21s12 + ......)
2
2
1 2 2 2
= ( s1 + s2 + s3 )
2
Terceiro Invariante
1
J 3 = sij s jk ski = s1s2 s3
3
Tensões Octaédricas
σ2
Plano Octaédrico
n~
τ oct
σ3
σ oct
toct
σ1
1 1 1
n =
~
3 3 3
T
Plano cuja normal
forma ângulos iguais
com os eixos principais
de tensão
σ oct ,τ oct = tensões octaédricas
t~ oct = σ~ oct + τ~ oct
Tensões Octaédricas
t oct
~
σ 1 0 0
= 0 σ2 0
0 0 σ
3
Componente na direção de n
~
σ oct =
σ1 + σ 2 + σ 3
3
Invariante
1
3
1
3
1
3
σ1
3
σ2
= 3
σ3
3
σ oct = ~toct . n~
σ oct
I1
=σm =
3
Tensões Octaédricas
Componente de Cisalhamento
τ oct
τ oct = t − σ
2
oct
[
1
2
2
2
=
(σ 1 − σ 2 ) + (σ 2 − σ 3 ) + (σ 3 − σ 1 )
9
2
oct
]
6J 2
τ oct
Invariante
2
J2
=
3
REPRESENTAÇÃO GEOMÉTRICA DO ESTADO DE TENSÃO
σ2
P(σ 1 , σ 2 , σ 3 )
linha hidrostática
r
~
σ
~
O
e
~
ξ
Espaço das tensões
principais
N
~
1 1 1
,
,
e=
~ 3
3 3
σ1
ON = ξ = σ~ . e~
σ~ = (σ 1 , σ 2 , σ 3 )
I1
ξ=
= 3σ m = 3σ oct
3
ξ = (σ m , σ m , σ m )
σ3
~
σ2
P(σ 1 , σ 2 , σ 3 )
linha hidrostática
r
~
σ
~
O
σ3
e
ξ
Espaço das tensões
principais
N
r = σ~ − ξ~
~
~
~
σ1
r = (σ1,σ 2 ,σ3 ) − (σ m ,σ m ,σ m ) = (s1, s2 , s3 )
~
Invariante
r = s + s + s = 2J 2
2
1
2
2
2
3
σ2
P(σ 1 , σ 2 , σ 3 ) linha ou eixo hidrostáti co
r
σ
~
O
σ3
σ~ = OP = (σ 1 , σ 2 , σ 3 )
~
e
~
ξ
N
ξ = ON = (σ m , σ m , σ m )
~
~
σ1
r~ = NP = ( s1 , s2 , s3 )
σ~ = OP = vetor de tensões do estado ori ginal
ξ = ON = vetor de tensões do estado hid rostático
~
r~ = NP = vetor de tensões do estado desviador
TEORIA DA PLASTICIDADE
Material Elastoplástico Perfeito
Postulado 1: Existe uma função de escoamento f(σ ij ) tal que:
Material em regime elástico se f (σ ij ) < 0 ou f (σ ij ) = 0 e f& (σ ij ) < 0
Material em regime plástico se f(σ ij ) = 0 e f&(σ ij ) ≥ 0
f (σ 11 , σ 22 , σ 33 , σ 23 , σ 13 , σ 12 )
ou
f (σ 1 , σ 2 , σ 3 , α1 , α 2 , α 3 )
σi
tensões principais
αi
ângulos que definem as direções principais
Superfície de Escoamento
f (σ ij ) = 0
Postulado 2:
O material é isótropo
A função de escoamento independe das direções e não muda com a
permutação dos eixos, ou seja, f é simétrica com relação às tensões
principais
f (σ 1 , σ 2 , σ 3 ) = f (σ 2 , σ 1 , σ 3 ) = f (σ 1 , σ 3 , σ 2 )
A função de escoamento pode ser expressa em função dos invariantes
f ( I1 , I 2 , I 3 )
Postulado 3:
Tensões hi drostática s não prov ocam escoa mento
p
f ( s1 , s2 , s3 )
ou
f (J2 , J3 )
p
p
p
p
Postulado 4:
Os comport amentos à tração e à compressã o
são idênti cos
O valor da tensão de escoamento não muda quando o sinal de
todas as componentes de tensão são trocados
f (σ ij ) = f (−σ ij )
Geometria da Surpefície de Escoamento
f (σ 1 , σ 2 , σ 3 ) = 0
σ2
e
~
σ
~
σ1 = σ 2 = σ 3
r
P•
~
ξ
N
Plano desviador ~r
= ( s1 , s2 , s3 )
σ1
o
σ3
eixo hidrostático
Equação do Plano Desviador
r 1 r 1 r 1 r
r
r
ξ = σ ⋅ e = (σ 1i + σ 2 j + σ 3 k ) ⋅
i+
j+
k
~ ~
3
3
3
ξ=
1
(σ 1 + σ 2 + σ 3 )
3
(σ 1 + σ 2 + σ 3 ) = 3ξ
B
σ2
f(σ 1 ,σ 2 ,σ 3 ) é uma fu nção simét rica
o
D
NAD ≡ NDB ≡ NEB ≡ NEC ≡ NCF ≡ NFA
60
60o
E
N
A
C
σ3
F
σ1
CRITÉRIO DE ESCOAMENTO DE TRESCA
Critério da Máxima Tensão de Cisalhamento
(Materiais Dúcteis)
σ
τ
45o
τ max
τ max =
σ
σ
σ
2
σ
σ
τ max =
σ2
τ max
σ
2
=K
Y
K=
2
Caso Tridimensional
σ3
σ1
1
1
1
Max σ 1 − σ 2 , σ 2 − σ 3 , σ 3 − σ 1 = K
2
2
2
Representação Geométrica do Critério de Tresca
σ2
Tridimensional
σ2
σ1
o
σ1
σ3
σ1
σ2
σ3
1
1
1
f (σ 1 , σ 2 , σ 3 ) = Max σ 1 − σ 2 , σ 2 − σ 3 , σ 3 − σ 1 − K = 0
2
2
2
Representação Geométrica do Critério de Tresca
Bidimensional
σ2
σ2
σ2 = Y
σ 1 − σ 2 = −Y
σ1 = Y
σ1
o
σ 1 = −Y
σ2
σ1 − σ 2 = Y
σ 2 = −Y
τ max =
σ1
σ1
σ max − σ min
2
Y
=
2
CRITÉRIO DE ESCOAMENTO DE VON MISES
Critério da Máxima Energia de Distorção
(Materiais Dúcteis)
ξ
σ2
σ1
σ3
σ1
σ2
=
ξ
ξ
ξ
Estado Hidrostático
Deformação
Volumétrica
σ2 −ξ
ξ
+σ −ξ
σ1 −ξ
1
σ3 −ξ
σ2 −ξ
Estado Desviador
∆V
1 − 2ν
= ε1 + ε 2 + ε 3 =
(σ 1 + σ 2 + σ 3 )
V
E
Estado Hidrostático de Tensão
∆V 3ξ (1 − 2ν ) (1 − 2ν )
(σ 1 + σ 2 + σ 3 )
=
=
V
E
E
Não gera distorção
τ = 0; γ = 0 em qualquer plano
Estado Desviador de Tensão
∆V 1 − 2ν
=
(σ 1 + σ 2 + σ 3 − 3ξ ) = 0
V
E
Não gera variação de volume
∆V
=0
V
Energia de Deformação Elástica Específica
σ2
σ1
σ3
Estado qualquer de tensão
σ1
σ2
Estado Hidrostático de tensão
Estado desviador de tensão
u=
1
(σ 1ε 1 + σ 2ε 2 + σ 3ε 3 )
2
ε =ε =ε =
h
1
h
2
h
3
ε 1s = ε 1 − ζ
ε 2s = ε 2 − ζ
ε 3s = ε 3 − ζ
ε1 + ε 2 + ε 3
3
=ζ
[
1
u = σ 1 (ζ + ε 1s ) + σ 2 (ζ + ε 2s ) + σ 3 (ζ + ε 3s )
2
[
]
1
1
u = ζ (σ 1 + σ 2 + σ 3 ) + σ 1ε 1s + σ 2ε 2s + σ 3ε 3s
2
2
energia associada
à variação de volume
(uV )
]
energia associada
à mudança de forma
ENERGIA DE DISTORÇÃO
(u D )
Energia Total
u = uV + u D
Critério de escoamento da Máxima Energia de Distorção
(Critério de von MISES)
u D = ulim
1 +ν
(σ 1 − σ 2 ) 2 + (σ 2 − σ 3 ) 2 + (σ 3 − σ 1 ) 2 = ulim
6E
[
]
σ1
σ1 = Y
σ2 = σ3 = 0
Obtenção experimental de ulim
ulim
1 +ν 2
Y
=
3E
Expressão do Critério de von Mises
(σ 1 − σ 2 ) 2 + (σ 2 − σ 3 ) 2 + (σ 3 − σ 1 ) 2 = 2Y 2
Representação Geométrica do Critério de von Mises
Tridimensional
σ2
o
σ3
plano
octaédrico
σ1
Representação Geométrica do Critério de von Mises
Bidimensional
σ2
(Y , Y )
Y
−Y
σ2
o
Y
σ1
σ2
a
(−Y ,−Y )
−Y
σ 1 − σ 1σ 2 + σ 2 = Y
2
σ1
σ1
2
2
Comparação entre os Critérios de Tresca e de von Mises
Caso Bidimensional
σ2
σ1
−Y
(−Y ,−Y )
Y
(Y , Y )
o
Y
−Y
σ1
Condição de Continuidade do Fluxo Plástico
Seja um ponto submetido a um estado de tensão σij sobre a superfície
de escoamento,ou seja,
f (σ ij ) = 0
Suponha que seja aplicado um incremento dσij em σij.
Condição para que o ponto continue
em processo de escoamento
f (σ ij + dσ ij ) = 0
df = f (σ ij + dσ ij ) − f (σ ij ) = 0
∂f
∂f
∂f
df =
dσ 11 +
dσ 22 + ..... +
dσ 12 = 0
∂σ 11
∂σ 22
∂σ 12
O gradiente de f é perpendicular ao vetor incremento de tensão
Condição de Continuidade do Fluxo Plástico
∂f
df =
dσ ij = 0
∂σ ij
∂f
∂σ
f (σ ij ) = 0
~
Vetor Incremento de Tensão
dσ T = {dσ 11 dσ 22 ......dσ 12 }
dσ
~
~
Vetor Gradiente da Função
σ
+ dσ
~ σ
~
~
o
(Condição de Consistência)
∂f
Grad (f) =
∂σ
~
∂f
∂f
∂f
Grad ( f ) =
.....
∂σ 12
∂σ 11 ∂σ 22
T
Grad (f)
dσ
~
Condição de Retorno ao Regime Elástico
∂f
∂σ
~
f (σ ij ) = 0
σ
~
o
∂f
df =
dσ ij < 0
∂σ ij
dσ
~
σ
+ dσ
~
~
O Gradiente de f forma um ângulo
obtuso com o vetor incremento de
tensão
Postulado de Drucker
Dado um corpo em equilíbrio sob um estado de tensão inicial definido
pelo vetor tensão generalizado Qi0 e submetido a um agente externo
que aplica lentamente um conjunto de forças auto-equilibradas que,
em seguida, são removidas. O trabalho realizado pelo agente externo
durante o ciclo aplicação-remoção das forças não é negativo.
Wext = Wtot − W0 ≥ 0
Wext = trabalho realizado pelo agente externo
Wtot = trabalho total realizado por todas as tensões
W0 = trabalho feito pelas tensões iniciais constantes
Vetor tensão generalizada
σ 11
σ
22
σ 33
Q=
~
σ 23
σ 31
σ 12
Vetor taxa de deformação generalizada
W& = Qi q&i
Potência
ε&11
ε&22
ε&
q& = 33
~ 2ε&23
2ε&31
2ε&12
W& = σ ij ε&ij
componente elástica
componente plástica
&qi = q&ie + q&ip
t = t1 + δ t
Superfície de
Escoamento
em t=t1+δt
t = t1
Q1 + δQ
Q1
t =0
Q o = Q2
Superfície de
escoamento
em t=0
Trabalho Total no Ciclo Aplicação-Remoção de Tensões
t1
Wtot = ∫ W& dt = ∫ Q q& dt + ∫
0
e
i i
t1 +δt
t1
Qi (q& + q& )dt + ∫
e
i
p
i
t2
t1 +δt
Qi q&ie dt
Trabalho realizado no ciclo fechado envolvendo deformações elásticas
é nulo
p
Wtot = ∫
t1 +δt
t1
p
i i
Q q& dt
δW
Incremento de
trabalho plástico
Trabalho realizado pelas tensões generalizadas Qi0 durante o ciclo
fechado
t1
W0 = ∫ Q q& dt + ∫
0
0 e
i i i
t1 +δt
t1
Q (q& + q& )dt + ∫
0
i
W0 = ∫
t1 +δt
t1
e
i
p
i
Qi0 q&ip dt
Wext = δW − δW0
p
t2
t1 +δt
Q i0 q&ie dt
δW0
p
p
Pelo Postulado de Drucker:
Wext = δW − δW0 = ∫
p
p
t1 +δt
t1
(Q − Q )q&
0
i
p
i
i
dt ≥ 0
δt arbitrariamente pequeno
Desigualdade
de
Drucker
(Q
(σ
p
i
p
ij
)
p
i
)
p
ij
− Q i q& ≥ 0
0
− σ ij ε& ≥ 0
0
OBS.: Foi usado o índice p em Qi e σij para indicar que tais tensões
correspondem a um ponto sobre a superfície de escoamento
(Q
)
− Q i q& ≥ 0
p
0
i
p
i
O vetor taxa de deformação plástica generalizada forma um
ângulo não maior que 90o com o vetor de incrementos de
tensões generalizadas
Em forma incremental, a desigualdade acima pode ser escrita na forma
(Q
p
i
)
− Q i dq ≥ 0
0
p
i
A, B
Pontos sobre a superfície de escoamento
&q p
superfície de escoamento
A
P
B
&q p
Se A → P e B → P
~
P
Lei ou Princípio da Normalidade
O vetor q& p é normal à superfície de escoamento e aponta para fora
Superfície de escoamento côncava viola o postulado de Drucker
O ângulo e ntre q& p e dQ pode resultar > 90 0
q& p
Superfície de escoamento
~
Q + dQ
~ ~
dQ
~
Q
~
Lei da Convexidade
A superfície de escoamento é convexa
Um material que satisfaz o Postulado de Drucker é dito ESTÁVEL
ou “ work-wardening material”
Função Potencial Plástico e Regra de Fluxo
Regra de Fluxo
Hipótese cinemática postulada para a
deformação plástica ou fluxo plástico
Função Potencial Plástico
g (σ ij )
Função escalar das tensões
Regra de Fluxo Plástico
∂g
dε = dλ
∂σ ij
p
ij
dλ = fator de proporcion alidade es calar não negativo
dε ijp = increment o de deforma ção plásti ca
Regra de Fluxo Plástico – Representação Geométrica
dε = dλ
p
ij
∂g
∂σ ij
g (σ ij ) = 0
dε
p
ij
∂g
σ ij
Regra de Fluxo Associada
g (σ ij ) = f (σ ij )
σ
~
d ε = dλ
p
ij
∂f
σ ij
o
Regra de Fluxo
Não Associada
g (σ ij ) ≠ f (σ ij )
Regra de Fluxo Geral Associada
f (J2 , J3 ) = 0
Lei da Normalidade:
dε
~
f (J2 , J3 ) = 0
P
1
J 2 = sij sij
2
1
J 3 = sij s jk ski
3
∂f
∂σ
~
p
ij
∂f ∂J 2 ∂f ∂J 3
= dλ
+
dε = dλ
σ ij
∂J 2 ∂σ ij ∂J 3 ∂σ ij
p
ij
∂f
∂f
∂f
dε = dλ
sij +
rij
∂J 3
∂J 2
p
ij
∂J 2
= sij
∂σ ij
∂J 3
1
= sip s pj − sqp s pqδ ij = r ij
3
∂σ ij
Regra de Fluxo Associada de von Mises
A função de escoamento de von Mises pode ser escrita como:
Y2
f (J2 ) = J2 −
=0
3
∂f ∂J 2
dε = dλ
∂J 2 ∂σ ij
Regra de Fluxo Associada
Como
p
ij
∂J 2
= sij
∂σ ij
dε = dλsij
p
ij
dε
dε
dε
dε
dε
dε
=
=
=
=
=
= dλ
s11
s22
s33
s12
s23
s13
p
11
p
22
p
33
p
12
p
23
p
13
Equações de Prandtl-Reuss
Materiais Elastoplásticos com Endurecimento
Caso Uniaxial
Endurecimento (strain hardening)
propriedade definida pelo
aumento contínuo da tensão axial com a evolução da deformação
axial após o ponto de escoamento.
σ
Y1
Y
carg
a1
σY 2
σ Y1
σY
σ
Y2
desc
arga
(1)
carg
a (2)
desc
arga
(2)
carg
a (3)
σ
εY
dσ
ε > εY ⇒
>0
dε
ε
Trajetórias carga-descarga praticamente retas e coincidentes,
paralelas ao ramo elástico linear inicial
Após descarga e carga consecutivas, ocorre um aumento da
tensão de escoamento
Materiais Elastoplásticos com Endurecimento
Caso Tridimensional
Endurecimento (strain hardening)
a superfície de escoamento
muda com a ocorrência de deformações plásticas adicionais
σ22
f (σ ij , ε , k ) = 0
p
ij
σ21
σ12
σ23
σ32
σ31σ13
σ33
σ11
k = parâmetro de endurec imento
ε ijp = componentes de deformação plástica
Regra de endurecimento
(?)
Define a evolução da superfície de
escoamento com o fluxo plástico
Critério de Continuidade de Fluxo Plástico
Material com Endurecimento
(
∂f
f =0 e
⋅ dσ
>0
~
∂σ~
dε ≠ 0
∂f
f =0 e
⋅ dσ~ ≤ 0
∂σ~
dε = 0
∂f
∂σ
~
)
f σ ij , ε ijp , k = 0
dσ
~
σ
~
σ + dσ
~ ~
p
ij
p
ij
∂f
∂σ
~
o
α < 90
o
α
dσ
~
dε~ ≠ 0
p
Regra de Endurecimento para Materiais
Elastoplásticos
f (σ ij , ε , k ) = F (σ ij , ε ) − k (ε p ) = 0
p
ij
p
ij
2
forma da superfície
tamanho da superfície
Definições
3
σ e = 3J 2 =
sij sij
2
Tensão Efetiva
2 p p
εp =
ε ij ε ij
3
Deformação Plástica Efetiva
Tensão e Deformação plásticas efetivas - Caso de Tensão Uniaxial
σ1
σ2 = 0
σ3 = 0
[
1
σ e = 3J 2 =
(σ 1 − 0) 2 + (0 − 0) 2 + (σ 1 − 0) 2
2
σ e = σ1
]
Tensão efetiva = Tensão uniaxial
σ1
[
2 p 2
εp =
(ε 1 ) + (ε 2p ) 2 + (ε 3p ) 2
3
1 p
p
p
ε 2 = ε 3 = − ε1
Material Plástico Incompressível
2
2 p p
εp =
ε ij ε ij
3
εp =ε
p
1
]
Deformação plástica efetiva = Deformação
plástica uniaxial
Modelo de Endurecimento Isótropo
A superfície inicial se expande uniformemente sem distorção
e sem translação quando ocorre o fluxo plástico
F (σ ij ) = k 2 (ε p )
σ2
F − k2 = 0
2
F − k1 = 0
k1 > k
o
σ1
Modelo de Endurecimento Isotrópo – Função de von Mises
f (σ ij , k ) = J 2 − k 2 (ε p ) = 0
σ1
σ1
Parâmetro k(εp)
[
]
1
1 2
2
2
2
J 2 = (σ 1 − 0) + (0 − 0) + (σ 1 − 0) = σ 1
6
3
2
2
1 2
2
σ e = 3k (ε p )
σ 1 − k (ε p ) = 0
3
1
k (ε p ) = σ e
3
1 2
J2 − σ e = 0
3
3J 2 − σ = 0
2
e
Modelo de Endurecimento Cinemático
Durante o fluxo plástico, a superfície de escoamento se desloca
como um corpo rígido no espaço das tensões, mantendo a forma,
o tamanho e a orientação da superfície inicial.
f (σ ij , ε ijp , k ) = F (σ ij − α ij ) − k 2 = 0
σ2
F (σ ij ) = k
B
A
2
F (σ ij − α ij ) = k 2
o1
AB - plástico
BAO – elástico
o
σ1
α ij = coordenadas de O1
α ij = α ij(εijp )
Modelo de Endurecimento Misto
Durante o fluxo plástico, a superfície de escoamento sofre uma
translação definida por αij e uma expansão uniforme medida por k2,
mantendo a sua forma original.
f (σ ij , ε ijp , k ) = F (σ ij − α ij ) − k 2 (ε p ) = 0
σ2
F (σ ij − α ij ) = k 12
F (σ ij ) = k 2
k1 > k
o1
o
σ1
α ij = α ij (ε ijp )
Relação Constitutiva Incremental
(Material Elastoplástico Perfeito)
Vetor de Incremento de Deformação
{dε } = {dε } + {dε }
e
p
Vetor de Incremento de Tensão
(
)
{dσ } = [C ]{dε } = [C ] {dε } − {dε }
e
p
[C ] = matriz de rigidez elástica do material
Lei da Normalidade
∂f
{dε } = dλ
∂σ
p
Aplicando a lei da normalidade
∂f
{dσ } = [C ]{dε } − dλ
∂σ
Condição de Consistência
T
∂f
{dσ } = 0
∂σ
T
T
∂f
∂σ
∂f
[C ]{dε } − dλ[C ] = 0
∂σ
T
∂f
∂f
∂f
[C ]dε − dλ [C ] = 0
∂σ
∂σ
∂σ
Fator de proporcionalidade
T
∂f
[C ]{dε }
∂σ
dλ =
T
∂f
∂f
[C ]
∂σ
∂σ
Relação Constitutiva Elastoplástica do Material
T
f
∂
[C ]{dε }
∂f ∂σ
dσ = [C ]{dε } −
T
σ
∂
f
f
∂
∂
[
]
C
∂σ
∂σ
T
∂
f
f
∂
[C ]
∂σ ∂σ
dσ = [C ] [ I ] −
T
{dε }
∂f
∂f
[C ]
∂σ
∂σ
Matriz de Rigidez Elastoplástica do Material
T
∂
f
f
∂
[C ]
∂σ ∂σ
ep
[C ] = [C ] [ I ] −
T
∂f
∂f
[C ]
∂σ
∂σ
APLICAÇÃO: Matriz de Rigidez de uma Barra
Condição de plastificação de uma seção transversal
ψ ( N x , V y , Vz , M x , M y , M z ) = 0
Material estável de Drucker:
p
&
& {G}
{U } = Λ
Lei da normalidade
p
&
{U } = vetor taxa de deslocamentos plásticos
{G} = vetor gradiente da função ψ
& = fator de proporcionalidade
Λ
A superfície ψ = 0 é convexa
∂ψ ∂ψ ∂ψ ∂ψ ∂ψ ∂ψ
{G} =
∂N x ∂V y ∂Vz ∂M x ∂M y ∂M z
T
Condição de Consistência
{G} {F& } = 0
T
{F& } = vetor taxa de deslocamentos forças
{F } = { N x , V y , V z , M x , M y , M z }
T
Seção Plastificada
Rotula Plástica
ψ =0
Elemento de Barra
2
1
Elemento com uma rótula plástica no extremo 1
1
plástico
Vetor taxa de deslocamentos nodais
& }
{
U
{U& } = 1
& }
{
U
2
2
elástico
Vetor taxa de forças nodais
& }
{
F
{F& } = 1
&}
{
F
2
[ ]
e
e
&
&
{F } = K {U }
[ K e ] = matriz de rigidez incremental elástica da barra
e
e
e
&
&
K
K
[
]
[
]
{F1}
U
{
11
1}
12
& = e
e &
{F2 } [ K 21 ] [ K 22 ] {U 2 }
Vetor de taxa de deslocamentos elásticos no extremo 1
{U& 1e } = {U& 1} − {U& 1p }
Seção do Extremo 1
Lei da normalidade
Condição de Consistência
& {G }
{U& 1p } = Λ
1
1
{G1}T {F&1} = 0
& {G } = 0
{G1}T [ K11e ]{U& 1} + {G1}T [ K12e ]{U& 2 } − {G1}T [ K11e ]Λ
1
1
& }
{
U
1
T
e
T
e
1
& =
Λ
{
}
[
]
{
}
[
]
G
K
G
K
1
1
11
1
12
T
e
&
{G1} [ K11 ]{G1}
{U 2 }
[
]
& {G }
{F&1} [ K11e ] [ K 12e ] {U& 1 } [ K11e ] [ K 12e ] Λ
1
−
=
& e
e
e &
e
{F2 } [ K 21 ] [ K 22 ] {U 2 } [ K 21 ] [ K 22 ] {0}
[ K11e ] [ K 12e ] {U& 1}
{F&1} [ K11e ] [ K 12e ]
1 {G1}
[I ] −
& = e
[{G1} {0}] e
e
e &
[
]
[
]
[
]
[
]
K
K
K
K
{
0
}
c
21
{F2 } 21
22
22
{U 2 }
c = {B1}T [ K11e ]{B1}
Matriz de Rigidez Elastoplástica do Elemento
{K }
1
EP
1
= [ K ] [ I ] − {G}{G}T [ K e ]
c
e
[
]
{G}T = {G1T } {0}