Lab Virtual de Ensino de Fı́sica
Prof. Samir Lacerda da Silva
email: [email protected]
Prática: Oscilações - Oscilador Harmônico Amortecido
1
Introdução - Oscilador Harmônico Amortecido
Neste experimento virtual iremos estudar o oscilador harmônico amortecido (OHA) para um sistema
massa-mola utilizando uma animação no Algodoo. Todos os movimentos oscilatórios considerados
até agora foram estudado para sistemas ideais, como o sistema massa-mola e o pêndulo simples.
Tais sistemas apresentam uma oscilação perpétua graças a ação de uma única força linear, a força
restauradora. Porém, quando aproximamos esses sistemas para o mundo real adicionando forças
dissipativas, elas geram um oscilação por um tempo limitado até que a amplitude do movimento
desapareça. Consequentemente, a energia mecânica do sistema diminui com o tempo, e o movimento
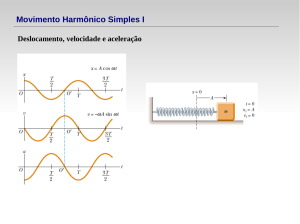
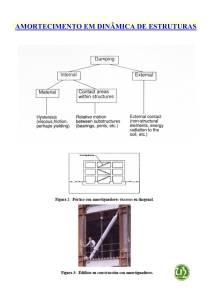
é chamado de amortecido. Como exemplos temos um objeto ligado a uma mola e submerso num
lı́quido viscoso (figura 1). Depois de ser colocado em movimento, o sistema atinge o repouso devido
à resistência do fluido.
Figura 1: Ilustração do sistema massa-mola submerso num lı́quido viscoso.
O caso mais simples para analisar o amortecimento é um oscilador harmônico simples com uma força
de amortecimento gerada pelo atrito com o lı́quido, que é diretamente proporcional à velocidade do
corpo oscilante. Essa força atua no sentido oposto ao da velocidade do objeto em relação ao meio.
Assim, a força e a velocidade estão relacionadas pela equação:
F~d = −b~v
(1)
onde b é a constante de amortecimento que depende das caracterı́sticas do sistema, nesse caso
do bloco e do lı́quido, e tem a unidade de kg/s no SI. O sinal negativo indica que F~d se opõe
ao movimento. Quando a força de atrito é pequena em comparação com a força restauradora, o
coeficiente de amortecimento b é pequeno e o movimento é descrito por:
x(t) = Ae−(b/2m)t cos(ω 0 t + φ)
(2)
onde A é a amplitude de oscilação, ω 0 é a frequência angular de oscilação do oscilador amortecido
e γ = b/2m o fator de amortecimento. A frequência angular é dada por:
1
Lab Virtual de Ensino de Fı́sica - labanimation.wordpress.com
ω0 =
com ω0 =
p
q
ω02 − γ 2
(3)
k/m.
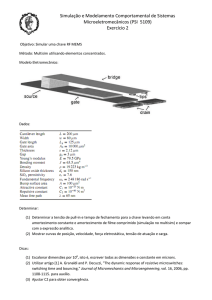
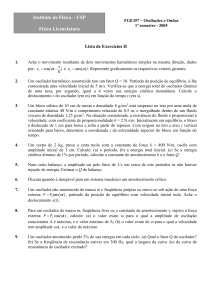
A amplitude de oscilação decai exponencialmente com o tempo. Na figura 2 podemos observar a
forma da curva do movimento harmônico amortecido descrito pela equação (2).
Figura 2: A função de deslocamento x(t) para o oscilador amortecido da figura 1. A amplitude que
é Ae−(b/2m)t , diminui exponencialmente com o tempo.
Nos movimentos amortecidos a força do amortecimento não é conservadora, desta forma, a energia
mecânica do sistema E(t) não é constante e diminui continuamente, tendendo a zero depois de um
tempo longo. Se o amortecimento é pequeno, podemos encontrar aproximadamente o valor de E(t),
2
−(b/2m)t
substituindo A na equação kA
. Desta forma, a energia mecânica de amortecimento
2 por Ae
fica:
E(t) =
2
1 2 −(b/m)t
kA e
2
(4)
Objetivos
O objetivo dessa prática virtual é rever os conceitos básicos do OHA. Para isso vamos calcular o fator
de amortecimento γ e avaliar os gráficos de energia cinética, potencial e mecânica do movimento
harmônico amortecido através de animações feitas no Algodoo.
3
Materiais
Para realizar a prática virtual vamos precisar dos seguintes materiais:
2
Lab Virtual de Ensino de Fı́sica - labanimation.wordpress.com
1. Animação OHA01a.phz[3] e OHA01b.phz [4].
2. Um programa de tratamento de planilhas como EXCEL, open office ou libreoffice.
3. Um programa de análise gráfico como OriginLab, QtiPlot[5] ou SciDAVis[6].
4. O template para formatação do relatório [7].
4
Teoria do experimento virtual
Um bloco vermelho é colocado sobre um plano horizontal e retiramos o atrito entre as superfı́cies
através da opção Material /Friction. Através da ferramenta Plane tool criamos uma plano perpendicular ao solo e conectamos uma mola do plano vertical ao bloco utilizando a ferramenta Spring
tool. Clicando sobre o bloco podemos modificar o valor da massa m do bloco em mass. Clicando
com o botão direito sobre a mola podemos modificar em Spring o valor da constante elástica k
da mola (Spring constant), o amortecimento da mola (Damping) e o comprimento da mola (target
length). Em nossas animações utilizamos m = 2.0 kg, k = 200 N/m e amortecimento nulo.
Através das animações OHA01a.phz e OHA01b.phz vamos estudar o movimento harmônico
amortecido em um sistema massa-mola. A animação OHA01a.phz apresenta o amortecimento do
ar. Para isso abilitamos a resistência do ar na ferramenta Turn air friction na barra ferramentas
inferior do Algodoo. Nessa ferramenta amplificamos a resistência do ar em 100x na opção Multiplier.
Já a animação OHA01b.phz apresenta o amortecimento na mola. Para abilitá-la atribuimos um
valor em Damping nas propriedades da mola.
Como apresentado na equação (2) a amplitude decai exponencialmente com o tempo e podemos
representá-la da seguinte forma:
xmax (t) ∝ e−γt
(5)
onde γ = b/2m é o fator de amortecimento.
Para obter o expoente γ podemos linearizar a equação (5) aplicando logarı́tmo neperiano (ln) nos
dois lados da expressão. O γ é o coeficiente linear desse procedimento.
ln(xmax (t)) ∝ −γt
5
(6)
Procedimentos:
1. Os passos abaixos são aplicados para as duas animações OHA01a.phz e OHA01b.phz.
2. Faça os gráficos x × t e v × t utilizando a ferramenta Show plot. Verifique se os gráficos
tem a forma das funções seno e cosseno com amplitude diminuindo exponencialmente.
3. Salvar os pontos do gráfico em um arquivo .CSV . Observe um intervalo de tempo longo em
que a amplitude do movimento seja próximo de zero.
3
Lab Virtual de Ensino de Fı́sica - labanimation.wordpress.com
4. Os arquivos salvos ficam na pasta screenshots do Algodoo. Abra o arquivo .CSV em um
programa de planilha (exemplo EXCEL). As colunas de tempo e posição ou velocidade estão
juntas, inicialmente separadas por vı́rgula. Utilize a planilha para separar em duas colunas.
Feito essa etapa, copie a nova planilha para o programa de gráfico QtiPlot.
5. Faça os gráficos independentes para x × t e v × t. Dê nomes aos eixos e coloque suas
unidades.
6. Através do gráfico x × t obtenha os pontos de máximos do deslocamento xmax .
7. Faça um outro gráfico de xmax × t. Os pontos devem formar uma exponencial decrescente.
8. Faça um gráfico de ln(xmax ) × t conforme a equação (6). Isso pode ser feito clicando na
escala vertical e mudando o tipo para ln ou manipuando as tabelas. Através da ferramenta
de regressão linear do QtiPlot obtenha o coeficiente angular da reta.
9. O coeficiente angular representa o valor do fator de amortecimento γ do movimento. Calcule
através de γ a constante de amortecimento b.
10. Calcule a frequência do movimento harmônico amortecido ω 0 . Compare com ω0 .
11. Monte um gráfico de energia cinética e potencial para todas as posições. Verifique se a soma
delas em todas as posições apresenta o mesmo valor.
12. Faça um gráfico da soma da energia potencial e cinética pelo tempo e compare a forma da
curva gerada com a equação (4).
13. Realizado todas as etapas anteriores apresente os resultados na forma de um relatório. Observe
a formatação do relatório conforme o template fornecido.
6
Referências:
[1]
[2]
[3]
[4]
[5]
[6]
[7]
Site do Algodoo - www.algodoo.com
Halliday, Resnick e Walker - Fundamentos de Fı́sica volume 2 – 8a ed. LTC (2008)
Animação OHA01a.phz - Acesse aqui
Animação OHA01b.phz - Acesse aqui
Programa Qtiplot - Acesse aqui
Programa SciDAVis - Acesse aqui
Template do Relatório - Acesse aqui
4