“ADT-MF” — 2005/11/7 — 8:51 — page 1 — #1
Armando Dias Tavares †
Revisado por:
J. U. Cinelli L. de Oliveira ‡
Mecânica Física
abordagem experimental e teórica
1977 – (2005)
UERJ – IF – DFT
†
‡
(1917 – 1988)
DFT – IF – UERJ
Rio de Janeiro – RJ – Brasil
“ADT-MF” — 2005/11/7 — 8:51 — page 2 — #2
c Departamento de Física Teórica
Instituto de Física
Universidade do Estado do Rio de Janeiro
Rio de Janeiro – Rio de Janeiro – Brasil
2004
Com 324 Figuras.
“ADT-MF” — 2005/11/7 — 8:51 — page 3 — #3
MECÂNICA FÍSICA
abordagem experimental e teórica
“ADT-MF” — 2005/11/7 — 8:51 — page 4 — #4
U E R J
Reitor
Nival Nunes de Almeida
Vice-reitor
Ronaldo Martins Lauria
EDITORA DA UNIVERSIDADE DO
ESTADO DO RIO DE JANEIRO
Conselho Editorial
César Benjamin
Ferreira Gullar
Francisco Caruso Neto
José Augusto Messias
Lúcia Bastos (Presidente)
Luiz Bernardo Leite Araújo
“ADT-MF” — 2005/11/7 — 8:51 — page 5 — #5
MECÂNICA FÍSICA
abordagem experimental e teórica
Armando Dias Tavares
(1917 – 1988)
Revisado por: J. U. Cinelli L. de Oliveira
Rio de Janeiro
2005
“ADT-MF” — 2005/11/7 — 8:51 — page 6 — #6
c
Copyright 2005,
dos autores
Todos os direitos desta edição reservados à Editora da Universidade do Estado do
Rio de Janeiro. É proibida a duplicação ou reprodução deste volume, ou de parte do
mesmo, sob quaisquer meios, sem autorização expressa da editora.
EdUERJ
Editora da U E R J
Rua São Francisco Xavier, 524 – Maracanã
CEP 20550-513 – Rio de Janeiro – RJ
Tel./Fax.: (21) 2587-7788 / 2587-7789
E-mail: [email protected]
Editora Executiva
Coordenador de Publicações
Coordenador de Produção
Revisão
Projeto Gráfico/Diagramação
Capa
Apoio Administrativo
Lúcia Bastos
Renato Casimiro
Rosania Rolins
Rosania Rolins
Heloisa Fortes
Maria Fátima de Mattos
CATALOGAÇÃO NA FONTE
UERJ/REDE SIRIUS/PROTAT
Sxxx
Xxxx Xxxx,
.
xxxx xxxx xxxx / XXXXX , XXXX XXXXX.
– Rio de Janeiro: EdUERJ, 2005, xxxp.
ISBN xx-xxxx-xxx-x
1. xxxx (xxxx). 2. xxxx – xxxx, I, xx xxx, xx
xxx. II Título.
CDU xxx.xxx.x
“ADT-MF” — 2005/11/7 — 8:51 — page 7 — #7
7
“ADT-MF” — 2005/11/7 — 8:51 — page 8 — #8
8
“ADT-MF” — 2005/11/7 — 8:51 — page 9 — #9
Sumário
Apresentação
Preâmbulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Orientação ao Estudante . . . . . . . . . . . . . . . . . . . . . . .
Introdução
21
21
22
25
1 Método Científico
1.1 Observação e experimentação . . . . . . . . .
1.2 Causa e Efeito . . . . . . . . . . . . . . . . .
1.3 Hipótese . . . . . . . . . . . . . . . . . . . .
1.4 Modelo e Matemática . . . . . . . . . . . . .
1.5 Construção de um modelo . . . . . . . . . . .
1.6 Confecção de uma caixa de pesos . . . . . . .
1.6.1 Observação . . . . . . . . . . . . . . .
1.6.2 Deflexão da haste em função do peso .
1.7 Grandeza Física: medição e medida . . . . . .
1.8 Função de uma variável . . . . . . . . . . . .
1.9 Lei de interdependência entre grandezas físicas
1.10 Eixos coordenados . . . . . . . . . . . . . .
1.11 Interpolação e extrapolação . . . . . . . . . .
1.11.1 Interpolação . . . . . . . . . . . . . .
1.11.2 Extrapolação . . . . . . . . . . . . .
Observação avançada . . . . . . . . . . . . .
Problemas . . . . . . . . . . . . . . . . . . . . . .
9
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
29
29
31
31
32
34
37
37
39
41
42
43
45
51
51
52
53
56
“ADT-MF” — 2005/11/7 — 8:51 — page 10 — #10
10
Sumário
I
Estática
61
2 Regra do paralelogramo
63
2.1 Deflexão de uma haste metálica . . . . . . . . . . . . . . . . . 65
2.1.1 Interpolação e dinamômetro . . . . . . . . . . . . . . . 69
2.1.2 Extrapolação . . . . . . . . . . . . . . . . . . . . . . . 70
2.2 Grandezas homogêneas . . . . . . . . . . . . . . . . . . . . . . 71
2.3 Grandezas físicas . . . . . . . . . . . . . . . . . . . . . . . . . 71
2.4 Erros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
2.4.1 Erros sistemáticos . . . . . . . . . . . . . . . . . . . . 72
2.4.2 Erros acidentais . . . . . . . . . . . . . . . . . . . . . . 72
2.4.3 Erros grosseiros . . . . . . . . . . . . . . . . . . . . . 73
2.5 Estudo dos erros acidentais . . . . . . . . . . . . . . . . . . . . 74
2.5.1 Dispersão, desvio ou resíduo . . . . . . . . . . . . . . . 75
2.5.2 Erro médio da média . . . . . . . . . . . . . . . . . . . 77
2.5.3 Erro relativo . . . . . . . . . . . . . . . . . . . . . . . 77
2.5.4 Erro tolerável . . . . . . . . . . . . . . . . . . . . . . . 77
2.6 Algarismo significativo . . . . . . . . . . . . . . . . . . . . . . 78
2.6.1 Operações com algarismos significativos . . . . . . . . 79
2.6.1.1 Normas para cálculo . . . . . . . . . . . . . . 79
2.7 Dinamômetros . . . . . . . . . . . . . . . . . . . . . . . . . . 80
2.7.1 Obtenção de um dinamômetro de precisão . . . . . . . . 81
2.8 Força aplicada em um ponto . . . . . . . . . . . . . . . . . . . 85
2.9 Experimento . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
2.10 Outro experimento . . . . . . . . . . . . . . . . . . . . . . . 88
2.11 Equilíbrio de três forças aplicadas em um ponto . . . . . . . . 90
2.11.1 Estudo da regra do paralelogramo . . . . . . . . . . . 92
2.11.2 Localização das forças relativamente à estrutura . . . . 92
2.11.3 Medição dos ângulos no plano . . . . . . . . . . . . . 93
2.11.4 A Regra do paralelogramo . . . . . . . . . . . . . . . 93
2.11.5 Determinação gráfica . . . . . . . . . . . . . . . . . . 94
2.11.5.1 Método gráfico . . . . . . . . . . . . . . . . 95
2.11.6 Determinação trigonométrica . . . . . . . . . . . . . . 96
2.11.6.1 Exemplo . . . . . . . . . . . . . . . . . . . 98
2.11.7 Método analítico para determinação da resultante . . . 98
2.11.7.1 Decomposição de uma força segundo duas direções dadas . . . . . . . . . . . . . . . . . 98
2.11.7.2 Conclusão das experiências anteriores . . . . 99
2.11.8 Regra do paralelogramo expressa analiticamente . . . . 100
“ADT-MF” — 2005/11/7 — 8:51 — page 11 — #11
11
Sumário
2.12 Regra do triângulo . . . . . . . . . . . . . . . . . . . . . . . . 102
2.12.1 Teorema de Lamy . . . . . . . . . . . . . . . . . . . . 102
Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
3 Grandezas Vetoriais
3.1 Associatividade da regra do paralelogramo . . . .
3.1.1 Método gráfico . . . . . . . . . . . . . . .
3.1.2 Segmentos equipolentes a um outro . . . .
3.1.3 Regra do polígono . . . . . . . . . . . . .
3.1.4 Método trigonométrico . . . . . . . . . . .
3.1.5 Método analítico . . . . . . . . . . . . . .
Problemas . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Grandezas vetoriais . . . . . . . . . . . . . . . . .
3.3 As Leis de Newton . . . . . . . . . . . . . . . . .
Primeira e Terceira leis de Newton . . . . . . . .
3.4 Alguns conceitos de Matemática . . . . . . . . . .
3.4.1 Noção de grupo matemático . . . . . . . .
Problemas . . . . . . . . . . . . . . . . . . . . . . . .
3.5 Espaço vetorial . . . . . . . . . . . . . . . . . . .
3.5.1 Diferença vetorial entre duas forças . . . .
Problemas . . . . . . . . . . . . . . . . . . . . . . . .
Corpo . . . . . . . . . . . . . . . . . . . . . . .
Subcorpo e extensão de corpo . . . . . . . . . .
Observação: grandeza vetorial . . . . . . . . . . . . .
Observação: espaço vetorial . . . . . . . . . . . . . . .
Observação: rotações . . . . . . . . . . . . . . .
3.6 Exemplos e aplicações das leis de Newton . . . . .
3.6.1 Solução pelo método gráfico . . . . . . . .
3.6.2 Solução pelo método trigonométrico . . . .
3.6.3 Solução pelo método analítico . . . . . . .
Problemas . . . . . . . . . . . . . . . . . . . . . . . .
Exercícios . . . . . . . . . . . . . . . . . . . . . . . .
Sistema de coordenadas levógiro . . . . . . . . .
Vetor axial . . . . . . . . . . . . . . . . . . . . .
Tensor anti-simétrico de segunda ordem e rotação
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
111
111
112
113
114
114
115
119
119
121
122
124
124
125
126
127
128
130
132
134
134
136
141
143
144
146
147
149
153
154
155
“ADT-MF” — 2005/11/7 — 8:51 — page 12 — #12
12
Sumário
4 Estudo do corpo rígido
4.1 Vetor deslizante ou vetor corrente . . . . . . . . . . . . . .
4.2 Composição de forças aplicada em um corpo rígido . . . . .
4.2.1 Caso de forças concorrentes em um ponto . . . . . .
4.2.2 Caso de forças paralelas . . . . . . . . . . . . . . .
4.2.2.1 Duas forças paralelas e de mesmo sentido .
4.2.2.2 Duas forças paralelas e sentidos contrários
Exercícios e problemas . . . . . . . . . . . . . . . . . . . . . .
4.3 Momento de uma força em relação a um eixo . . . . . . . .
4.3.1 Verificação experimental . . . . . . . . . . . . . . .
4.3.2 Outro modo de definir momento de força . . . . . .
4.4 Produto vetorial de dois vetores . . . . . . . . . . . . . . .
4.4.1 Representação vetorial do momento de força . . . .
4.5 Composição de forças paralelas . . . . . . . . . . . . . . .
4.5.1 Problema exemplo . . . . . . . . . . . . . . . . . .
4.5.2 Problema exemplo . . . . . . . . . . . . . . . . . .
4.5.3 Problema exemplo . . . . . . . . . . . . . . . . . .
4.5.4 Produto vetorial . . . . . . . . . . . . . . . . . . . .
Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6 Centro de gravidade . . . . . . . . . . . . . . . . . . . . . .
4.6.1 De uma distribuição linear de pesos . . . . . . . . .
4.6.2 De uma distribuição de pesos no plano . . . . . . .
4.6.3 De uma distribuição de pesos no espaço . . . . . . .
Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.4 De uma distribuição não-discreta de pesos . . . . . .
4.6.5 Caso de uma distribuição linear contínua de pesos . .
4.6.6 Peso específico . . . . . . . . . . . . . . . . . . . .
4.7 Condições de equilíbrio de um corpo rígido . . . . . . . . .
4.7.1 Problemas . . . . . . . . . . . . . . . . . . . . . . .
4.8 Estudo da balança . . . . . . . . . . . . . . . . . . . . . . .
4.8.1 Qualidades da balança . . . . . . . . . . . . . . . .
4.9 Problemas com a balança . . . . . . . . . . . . . . . . . . .
4.10 Atrito entre superfícies sólidas . . . . . . . . . . . . . . . .
4.11 Leis de Coulomb sobre o atrito . . . . . . . . . . . . . . .
4.12 Caso do atrito cinético . . . . . . . . . . . . . . . . . . . .
4.13 Experiências sobre o atrito . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
159
161
162
162
162
162
164
167
171
174
179
180
180
182
184
186
188
192
195
202
203
204
205
207
209
210
213
215
219
220
220
221
225
226
226
227
“ADT-MF” — 2005/11/7 — 8:51 — page 13 — #13
13
Sumário
II Dinâmica: Cinemática e Cinética
231
5 Mecânica
233
5.1 Sistema de Referência Galileanos . . . . . . . . . . . . . . . . . 240
5.2 Transformação de Lorentz . . . . . . . . . . . . . . . . . . . . 243
6 Cinemática
6.1 Sistema de coordenadas no plano . . . . . . . . . . . .
6.2 Movimento de um ponto . . . . . . . . . . . . . . . .
6.2.1 Trajetória . . . . . . . . . . . . . . . . . . . .
6.2.2 Equações paramétricas da trajetória . . . . . .
6.3 Estudo do movimento de um ponto . . . . . . . . . . .
6.4 Espaço percorrido . . . . . . . . . . . . . . . . . . . .
6.5 Velocidade instantânea . . . . . . . . . . . . . . . . .
6.6 Vetor velocidade instantânea . . . . . . . . . . . . . .
6.7 Espaço percorrido num movimento qualquer . . . . .
6.7.1 Rapidez instantânea . . . . . . . . . . . . . .
6.7.2 Representação do vetor velocidade instantânea .
6.7.3 Espaço percorrido . . . . . . . . . . . . . . . .
Problemas . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
7 Estudo da Aceleração
7.1 Aceleração . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Componentes normal e tangencial da aceleração . . . . .
7.3 Raio de curvatura e curvatura . . . . . . . . . . . . . .
7.4 Expressão cartesiana do raio de curvatura e da curvatura
8 Movimento de um ponto
8.1 Movimento de um ponto no plano . . . . . . . . .
8.1.1 Movimento retilíneo – trajetória retilínea .
8.1.1.1 Uniforme . . . . . . . . . . . . .
8.1.1.2 Uniformemente variado . . . . .
8.1.1.3 Variado . . . . . . . . . . . . . .
8.1.2 Movimento curvilíneo . . . . . . . . . . .
8.1.2.1 Circular . . . . . . . . . . . . .
8.1.2.2 Circular uniforme . . . . . . . .
8.1.2.3 Circular uniformemente acelerado
8.1.2.4 Movimento curvilíneo qualquer .
8.1.3 Espaço percorrido . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
249
250
252
252
253
253
261
263
266
269
269
271
271
277
.
.
.
.
297
297
299
302
306
.
.
.
.
.
.
.
.
.
.
.
311
311
311
312
312
312
312
312
312
312
313
313
“ADT-MF” — 2005/11/7 — 8:51 — page 14 — #14
14
Sumário
8.1.4 Gráfico . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1.4.1 Movimento retilíneo uniforme . . . . . . . . .
8.1.4.2 Movimento retilíneo uniformemente acelerado
8.1.4.3 Movimento retilíneo uniformemente retardado
8.1.4.4 Deslocamento . . . . . . . . . . . . . . . . . .
8.2 Grandezas cinemáticas ligadas ao movimento circular . . . . .
8.2.1 Velocidade angular . . . . . . . . . . . . . . . . . . . .
8.2.2 Aceleração angular . . . . . . . . . . . . . . . . . . . .
8.2.3 Deslocamento angular . . . . . . . . . . . . . . . . . .
8.2.4 Relação entre aceleração tangencial e aceleração angular
8.2.5 Expressão vetorial da velocidade angular . . . . . . . . .
8.2.6 Relação entre velocidade e velocidade angular . . . . .
8.2.6.1 Exemplo – movimento harmônico simples . . .
8.3 Mudança de sistema de referência . . . . . . . . . . . . . . . .
Exemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.1 Relação entre a velocidade de transporte e as velocidades
de translação e de rotação . . . . . . . . . . . . . . .
8.4 Aceleração absoluta, de transporte, relativa e de Coriolis . . . .
Exemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9 Dinâmica
9.1 Massa inerte . . . . . . . . . . . . . . . . . . .
9.2 Massa gravífica . . . . . . . . . . . . . . . . .
9.3 Massa gravífica e a massa inerte . . . . . . . .
9.3.1 Forças que atuam sobre a partícula . . .
9.3.2 Observação . . . . . . . . . . . . . . .
9.4 A balança de Eötvös . . . . . . . . . . . . . .
9.5 Sistema de unidades mecânicas . . . . . . . .
9.5.1 Sistemas MLT . . . . . . . . . . . . . .
9.5.1.1 Sistema CGS . . . . . . . . .
9.5.1.2 Sistema MKS . . . . . . . . .
9.5.1.3 Sistema inglês FPS . . . . . .
9.5.2 Sistemas FLT . . . . . . . . . . . . . .
9.5.2.1 Sistema métrico técnico . . .
9.5.2.2 Sistema técnico inglês . . . .
9.5.3 O Sistemas métrico . . . . . . . . . . .
9.5.3.1 Definição da unidade de massa
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
314
315
315
317
318
321
322
323
323
324
325
327
328
337
340
341
344
346
352
361
363
365
367
368
370
372
376
377
377
377
378
378
378
379
379
383
“ADT-MF” — 2005/11/7 — 8:51 — page 15 — #15
15
Sumário
9.5.3.2 Definição da unidade de força no sistema métrico . . . . . . . . . . . . . . . . . . . . .
9.5.4 Problemas simples com unidades . . . . . . . . . . . . .
9.5.4.1 Sistemas MLT . . . . . . . . . . . . . . . . .
9.5.4.2 Sistemas FLT . . . . . . . . . . . . . . . . . .
9.5.4.3 Relação entre as unidades . . . . . . . . . . .
9.5.4.4 A unidade SI de tempo . . . . . . . . . . . . .
A unidade SI de tempo . . . . . . . . . . . . . . . . .
9.6 A máquina de Atwood . . . . . . . . . . . . . . . . . . . . . .
9.6.1 Sobre a experiência da verificação da equação da dinâmica . . . . . . . . . . . . . . . . . . . . . . . . . .
Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.7 Movimento de projéteis . . . . . . . . . . . . . . . . . . . . . .
10 Centro de massa
10.1 Distribuição contínua de massa . . . . . . . . . . . . .
10.1.1 Massa específica . . . . . . . . . . . . . . . . .
10.1.2 Centro de gravidade de um corpo . . . . . . . .
10.1.2.1 Massas específicas superficial e linear
10.1.2.2 Exemplos . . . . . . . . . . . . . . .
Questionário, exercícios e problemas . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
383
384
384
385
385
386
386
387
393
394
395
399
403
403
404
406
407
408
11 Princípio da conservação da energia mecânica
421
11.1 Aplicações . . . . . . . . . . . . . . . . . . . . . . . . . . . . 421
11.2 Determinação do momento de inércia de um corpo com a mesa
giratória . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 421
12 Movimento periódico e Regressão linear
12.1 Movimento periódico . . . . . . . . . . . . . .
Exercícios e Problemas . . . . . . . . . . . . .
12.2 Movimento Harmônico Simples . . . . . . . . .
12.2.1 Exemplos práticos . . . . . . . . . . . .
12.2.1.1 Corpo suspenso por uma mola
Experiências . . . . . . . . . . . . . . . . . . .
12.2.2 Exame da equação diferencial do MHS .
12.3 A 2a lei de Newton na rotação de um corpo . . .
12.3.1 Momento de inércia de
um corpo rígido em relação a um eixo .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
425
425
426
427
432
432
433
435
435
. . . . . . . . 435
“ADT-MF” — 2005/11/7 — 8:51 — page 16 — #16
16
Sumário
12.3.2 Momento de inércia de
distribuição contínua de massa . . . . . . . . . . . .
12.3.3 Teorema de Steiner–Huygens . . . . . . . . . . . . . .
12.4 Pêndulo físico . . . . . . . . . . . . . . . . . . . . . . . . . .
Problemas práticos . . . . . . . . . . . . . . . . . . . . . . .
12.5 Raio de giração . . . . . . . . . . . . . . . . . . . . . . . . .
12.6 Pêndulo simples . . . . . . . . . . . . . . . . . . . . . . . . .
12.6.1 Determinação experimental da aceleração da gravidade
por pêndulo simples . . . . . . . . . . . . . . . . . .
12.6.2 Análise dos resultados . . . . . . . . . . . . . . . . . .
12.7 Método dos mínimos quadrados . . . . . . . . . . . . . . . . .
12.7.1 Aplicação do método dos mínimos quadrados . . . . .
12.8 Retas de regressão. Coeficiente de correlação . . . . . . . . . .
12.9 Aplicação ao exemplo do pêndulo simples . . . . . . . . . . .
12.9.1 Observação importante . . . . . . . . . . . . . . . . .
Problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Observação: Físico Teórico e Físico Experimental . . . . . . .
Observação: Sobre a montagem . . . . . . . . . . . . . . . .
13 Elasticidade
13.1 Esforço Específico num ponto
13.2 Deformação específica . . .
13.3 Tração e compressão . . . .
13.4 Corte ou cisalhamento . . . .
13.5 Esforço sobre um volume . .
13.6 Torção . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
14 Aplicações práticas – oscilações
14.1 Oscilação de um sistema por torção . . . . . . . . . . . . . . .
14.2 Deflexão de uma haste . . . . . . . . . . . . . . . . . . . . .
14.3 Composição geométrica de movimentos harmônicos . . . . . .
14.4 Representação geométrica . . . . . . . . . . . . . . . . . . . .
14.5 Gráfico do movimento harmônico simples . . . . . . . . . . .
14.6 Representação complexa do harmônico simples . . . . . . . .
14.7 Composição de movimentos harmônicos simples de mesma direção . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14.7.1 Composição de MHS de mesma freqüência, diferença
de fase constante, e de mesma direção. . . . . . . . .
14.7.2 Composição de vários MHS (caso particular) . . . . .
438
439
445
446
451
453
455
460
462
463
466
477
478
479
484
485
487
488
488
488
490
491
491
495
495
498
500
500
502
503
504
504
507
“ADT-MF” — 2005/11/7 — 8:51 — page 17 — #17
17
Sumário
14.7.3 Caso particular importante . . . . . . . . . . . . . . .
14.8 Composição geométrica de MHS de freqüências quase iguais .
14.8.1 Representação gráfica . . . . . . . . . . . . . . . . . .
14.9 Composição de MHS de freqüências diversas . . . . . . . . .
14.9.1 Freqüências comensuráveis . . . . . . . . . . . . . . .
14.9.2 Freqüências incomensuráveis . . . . . . . . . . . . . .
14.10 Movimentos harmônicos de direções ortogonais . . . . . . .
14.10.1 Composição de MHS de mesma freqüência, diferença
de fase e direções ortogonais . . . . . . . . . . . . .
14.10.2 Estudo dos diversos casos . . . . . . . . . . . . . . .
14.10.3 Os MHS têm freqüências quase iguais . . . . . . . .
14.11 Experimento . . . . . . . . . . . . . . . . . . . . . . . . . .
14.12 Freqüências nitidamente diversas . . . . . . . . . . . . . . .
14.13 Freqüências incomensuráveis e não múltiplas de freqüências
quase iguais . . . . . . . . . . . . . . . . . . . . . . . . . . .
15 Movimento periódico complexo
15.1 Harmônicos . . . . . . . . . . . . . . . .
15.2 Série de Fourier . . . . . . . . . . . . . .
15.3 Energia no movimento harmônico simples
15.3.1 Cálculo da energia mecânica . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
16 Movimento harmônico amortecido, forçado e ressonância
16.1 Movimento harmônico amortecido . . . . . . . . . . . . . . .
16.1.1 Movimento harmônico superamortecido . . . . . . . .
16.1.2 Movimento harmônico criticamente amortecido . . . .
16.1.3 Movimento harmônico subamortecido . . . . . . . . .
16.2 Decremento logarítmico . . . . . . . . . . . . . . . . . . . . .
16.3 Dissipação de energia . . . . . . . . . . . . . . . . . . . . . .
16.4 Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16.5 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16.6 Movimento harmônico forçado . . . . . . . . . . . . . . . . .
16.7 Ressonância . . . . . . . . . . . . . . . . . . . . . . . . . . .
16.7.1 Experimento com pêndulos acoplados idênticos . . . .
16.7.2 Experimento com pêndulos acoplados de mesmo comprimento e massas diferentes . . . . . . . . . . . . . .
16.8 Batimentos . . . . . . . . . . . . . . . . . . . . . . . . . . .
16.8.1 Experimentos . . . . . . . . . . . . . . . . . . . . . .
16.9 O cilindro dançante . . . . . . . . . . . . . . . . . . . . . . .
508
511
512
513
513
514
514
514
516
518
520
522
526
527
527
528
528
529
533
533
536
536
537
542
543
545
549
550
556
556
558
559
559
563
“ADT-MF” — 2005/11/7 — 8:51 — page 18 — #18
18
Sumário
17 Movimento ondulatório
17.1 Comprimento de onda . . . . . . . . . . . . . . . . . . . . . .
17.2 Equação diferencial da onda . . . . . . . . . . . . . . . . . .
17.3 Trem de onda . . . . . . . . . . . . . . . . . . . . . . . . . .
17.4 Freqüência . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17.5 A onda senoidal . . . . . . . . . . . . . . . . . . . . . . . . .
17.6 Ondas transversais e ondas longitudinais . . . . . . . . . . . .
17.6.1 Ondas transversais . . . . . . . . . . . . . . . . . . .
17.6.2 Ondas longitudinais . . . . . . . . . . . . . . . . . . .
17.7 Aplicações da equação da onda . . . . . . . . . . . . . . . . .
17.7.1 Cordas vibrantes . . . . . . . . . . . . . . . . . . . .
17.7.2 Reflexão de onda numa corda vibrante – Ondas estacionárias . . . . . . . . . . . . . . . . . . . . . . . . .
17.7.3 Condições de contorno . . . . . . . . . . . . . . . . .
17.7.4 Exercícios . . . . . . . . . . . . . . . . . . . . . . . .
565
566
567
569
569
570
572
572
572
573
573
Apêndices
585
A Coletânea de Preâmbulos dos Fascículos
A.1 Preâmbulo do Fascículo 0 . . . . . .
A.2 Introdução do Fascículo I . . . . . .
A.3 Preâmbulo do Fascículo II . . . . . .
A.4 Preâmbulo do Fascículo IV . . . . . .
A.5 Preâmbulo do Fascículo V . . . . . .
A.6 Preâmbulo do Fascículo VI . . . . .
585
585
586
586
587
587
588
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
575
578
579
B Discurso de Paraninfo
589
C Fac-símile de um artigo
599
D Fragmentos de “O Ensaiador” de Galileu Galilei
607
E Referencial inercial – Diálogo – Galileu
613
Prefixos SI
617
“ADT-MF” — 2005/11/7 — 8:51 — page 19 — #19
19
Sumário
Suplementos
621
Sobre a revisão, editoração e contribuições
621
Lista de Figuras
623
Lista de Tabelas
633
Referências
635
Índice Remissivo
638
“ADT-MF” — 2005/11/7 — 8:51 — page 20 — #20
20
Sumário
“ADT-MF” — 2005/11/7 — 8:51 — page 21 — #21
Apresentação ∗
Preâmbulo †
Ao escrever este livro pensamos no estudante que deseja realmente aprender
física e que em geral não vê muita relação entre o que aprende, o que o cerca e,
principalmente, o laboratório; seja porque não existe, seja porque quando o alcança se perde na sua complexidade. A Física Experimental não é fácil, exige
o conhecimento dos fenômenos, conceitos, leis e princípios; exige o conhecimento da matemática para representá-los e para desenvolvê-los em teoremas e
para resolver problemas teóricos e práticos, e para alcançar aplicações tecnológicas. Como aprender física para chegar à plena realização do conhecimento
teórico e experimental ou tecnológico?
Existem excelentes livros e manuais de Física, nacionais e estrangeiros.
Seus autores, de modo geral, procuram dar a explicação dos fenômenos, leis,
princípios e conceitos físicos com muitos problemas; mas não se preocupam
com a parte do laboratório que é deixada para os manuais práticos; estes relacionam as experiências sem inseri-las num contexto teórico. Neste livro procuramos, a partir de observações e experiências simples, conduzir o estudante
para a parte teórica e em seguida para suas aplicações teóricas e experimen∗
u O que consta nesta apresentação foi publicado em 1981 pelo Prof. Armando, no Fas
cículo 0 com Preâmbulo datado de 20 de agosto de 1976, que nesta revisão (pág. 21 – pág. 109)
mesclamos com o Fascículo 1, publicado em 1980 e com Introdução datada de 20 de fevereiro
de 1976. Parece-nos que a intenção era reescrever toda a obra, detalhando alguns tópicos e
adaptando melhor o que já havia sido experimentado com estudantes em aulas teóricas, aulas
em laboratório, e em avaliações escritas, verbais (argüições) e relatórios das experiências. O
texto desta seção visa expor as idéias do autor sobre o ensino e aprendizagem da Física (ver
pág. 589), para professores, futuros professores e estudantes.
†
Preâmbulo do Fascículo 0 – 1981.
21
“ADT-MF” — 2005/11/7 — 8:51 — page 22 — #22
22
Apresentação
tais. Como não podia deixar de ser, acompanha este livro o Laboratório Portátil que é parte integrante do curso. Com ele, o estudante poderá realizar as
experiências básicas necessárias a um desenvolvimento do conhecimento de
Física Geral e Experimental. Procuramos sempre que possível e desejável recordar a matemática necessária, mostrando seu relacionamento com a Física
Experimental. Sabemos que muitas vezes os conhecimentos de matemática do
estudante de física ou não existem ou jazem em seu subconsciente sem nenhum relacionamento com as experiências de Física, daí esse nosso empenho.
Rio de Janeiro, 20 de agosto de 1976
Armando Dias Tavares
Orientação ao Estudante ‡
Este livro foi desenvolvido com o objetivo de tornar a Física accessível, mesmo
àqueles que estudam sozinhos, sem auxílio de um professor experimentado.
Devo lembrar ao estudante que o vocabulário usado deve ser aprendido
muito bem, pois sem esse vocabulário o aluno não entenderá a língua portuguesa com que se descrevem os fenômenos, conceitos e leis da Física – esse
vocabulário constituirá o português científico relativo à Física – . No fim de cada capítulo, o estudante encontrará uma série de problemas e exercícios, entre
os quais figuram perguntas sobre o significado das palavras empregadas – e que
vão constituir o vocabulário científico em português – ; é claro que o estudante
deverá sabê-lo de modo perfeito.
Para estudar os capítulos, o estudante deverá lê-los do princípio ao fim, de
uma só vez, procurando entendê-los, meditando nos conceitos e respondendo
às perguntas eventuais (postas no texto ou que ocorram ao estudante). Ficará
assim com uma idéia geral do seu conteúdo; as palavras e passagens que não
conhecia deverão ser anotadas. Após essa leitura geral, o estudante inicia um
estudo mais minucioso, procurando entender tudo de modo completo. Em seguida procurará repetir o que foi descrito, com seu estilo, naturalmente usando
as palavras e os termos científicos aprendidos. Deverá reproduzir oralmente e
‡
Introdução do Fascículo 1 – 1980.
“ADT-MF” — 2005/11/7 — 8:51 — page 23 — #23
23
Apresentação
por escrito as definições, leis e conceitos. Deverá reproduzir todas as demonstrações do texto com naturalidade e perfeição. A parte experimental deverá
ser desenvolvida concomitantemente; é imprescindível que o estudante faça,
reproduza as experiências programadas. Observe que começamos com a experiência mais simples possível, exatamente para que o estudante possa encontrar
o mínimo de dificuldades iniciais na experimentação. Note o estudante que ele
está aprendendo Física que, apesar de ser no ramo das ciências da natureza o
mais simples, envolve conhecimento muito complexo. A Física Experimental
não pode ser aprendida sem experimentação ou então não é Física Experimental, da mesma forma, a formação em Física Teórica ou em Física Aplicada não
pode ocorrer sem vivência da física experimental; não é Física, é outra matéria
alheia ao mundo em que vivemos.
Rio de Janeiro, 20 de fevereiro de 1976
Armando Dias Tavares
“ADT-MF” — 2005/11/7 — 8:51 — page 24 — #24
24
“ADT-MF” — 2005/11/7 — 8:51 — page 25 — #25
Introdução§
Como Ensinar Física?
1o – A Escola foi criada para o aluno, e seu objetivo é instruí-lo e educá-lo.
2o – O aluno na Escola não só adquire conhecimento como aprende e adquire
atitudes, comportamento e hábitos sadios relacionados com a matéria
ensinada: aprende a falar e a escrever corretamente sua língua materna;
a raciocinar e usar a matemática em diferentes situações e processos
reais ou ideais; aprende a falar, escrever e entender uma ou duas línguas estrangeiras; com a biologia, a ecologia e a história natural não só
adquire vasto conhecimento dos seres vivos, seu habitat, seu relacionamento e interdependência, como também adquire sadios hábitos de vida;
tolerância e compreensão humana podem ser-lhe induzidas pelo estudo
da geografia política e humana, e pelo estudo da história, e da sociologia; adquire consciência social nacional pelo estudo da história e da
geografia do Brasil; a psicologia pode dar-lhe uma penetração maior no
convívio com seus semelhantes e um poder maior sobre sua mente. Em
suma, cada matéria ou disciplina que estuda traz sua contribuição para o
desenvolvimento de sua personalidade para torná-lo um ser social altamente capacitado, produtivo e de sentimentos positivos na sociedade em
que vive.
3o – A Física assume papel relevante na sua formação cultural, pois, mais
do que qualquer outra ciência, poderá dar-lhe conhecimento, atitudes
e hábitos de observação e objetividade pelo uso do Método Científico;
§
Introdução do Fascículo 0 – 1981.
25
“ADT-MF” — 2005/11/7 — 8:51 — page 26 — #26
26
Introdução
a experimentação dá-lhe o processo de tornar efetiva a objetividade e
o senso crítico. Desenvolvendo e aplicando o raciocínio matemático,
subordina-o à verificação experimental, objetivando-o, concretizando-o
e criticando-o. Desenvolvendo-lhe o poder de observação, ensina-o também a usar a experimentação para chegar à conclusões e para verificar
conceitos, leis e resultados teóricos. Forja-lhe assim a parte objetiva de
sua mente, contribuindo poderosamente para torná-lo intelectualmente
independente. Por outro lado, é a base da tecnologia moderna; fornecendo ainda o substrato para uma compreensão da atual estrutura da
sociedade.
Entretanto não serão alcançados esses objetivos da Escola na formação do estudante se o método de ensino não for adequado; neste caso o ensino pode até
mesmo tornar-se prejudicial, criando preconceitos, noções falsas, distorções
e frustrações que acompanharão o aluno pela vida afora, falhando a Escola
lamentavelmente.
O Ensino da Física, como de qualquer outra ciência, exige:
1o – Compreensão perfeita das definições, conceitos e leis fundamentais.
2o – Uso da matemática para exprimir esses conceitos e leis, desenvolvê-los e aplicá-los.
3o – Uso da observação e experimentação para o estabelecimento dos
conceitos, leis fundamentais e verificação dos resultados teóricos e
aplicações práticas.
É preciso ressaltar porém que não pode nem deve haver uma separação
nítida entre esses três atributos de um ensino correto de Física, todos estão
intimamente entrelaçados, indo, por assim dizer, constituir uma estrutura única
que aprendida pode atuar como um todo no trabalho profissional e na pesquisa.
O método de ensino deve assim visar a Compreensão e a Transferência de
Aprendizagem, por isso devemos acrescentar um quarto item para completar
os três anteriores:
4o – Formulação de problemas teórico-práticos que exijam habilidade
específica, emprego da teoria aprendida, raciocínio e pesquisa para
encontrar a solução; em suma, grande transferência de aprendizagem.
“ADT-MF” — 2005/11/7 — 8:51 — page 27 — #27
Introdução
Do ponto de vista da Escola, a parte mais onerosa é sem dúvida a parte
experimental, pois que, para haver máxima eficiência, o ensino deve ser individual. Se, de um lado, podemos ensinar a 20, 30 ou até mesmo a 50 alunos
simultaneamente quando se trata de meras explicações teóricas ou práticas,
por outro lado, quando se passa ao uso dos conhecimentos, à experimentação
e pesquisa, só é possível fazer o aluno sentir, ou viver o “problema”, se é ele
de fato que faz a experiência em todas as suas fases. Ora, se reconhecemos
que o ensino individual é o mais correto e eficiente, é também evidente que
ele é muito caro; nenhuma escola podendo adotá-lo, levando em conta que o
investimento em laboratórios, aparelhos e instrumentos científicos necessários
o tornam proibitivo.
Por isso idealizamos um conjunto de peças e instrumentos para tornar o
ensino da Física realmente eficiente. O estudante poderá, com esse conjunto
e usando um método progressivo e lógico, realizar as experiências básicas da
Física em sua escrivaninha de estudo teórico, com erro relativo (com 95 % de
nível de confiança) que varia de 5 % a 0,1 %, dependendo de sua habilidade
e do tipo da experiência. Pela sua simplicidade e planejamento específico, o
conjunto fica ao alcance do estudante, pois o investimento a realizar é mínimo.
Iniciamos o estudo da Física pela Mecânica, por ser a parte fundamental e
por ser mais fácil de desenvolver, fornecendo também grande parte do material
necessário ao estudo do restante da Física.
O Estojo de Mecânica que se acha em uso há 4 anos ¶ em turmas de 35 – 50
alunos (aula prática individual), de tão pequena, recebeu o nome de Estojo de
Física; nesse estojo cabe grande parte dos dispositivos para o estudo do calor,
ótica geométrica e acústica. Cada aluno poderá assim ter seu Estojo de Física
que poderá levar para casa, se o desejar e for permitido, a fim de ter horas
adicionais de estudo por meio de realização de experiências. Com o Estojo de
Mecânica foram programadas as seguintes experiências: k
1. Correlação entre grandezas físicas. Gráficos. Estudo da deflexão de uma
haste em função do peso em sua extremidade. (1 experiência)
2. Calibração de dinamômetro. (3 experiências)
3. Duas forças em equilíbrio aplicadas em um ponto; duas forças em equilíbrio aplicadas na extremidade de fios. (2 experiências)
¶
k
u
u
Redigido em 1976.
Essa listagem não esgota o que consta neste livro.
27
“ADT-MF” — 2005/11/7 — 8:51 — page 28 — #28
28
Introdução
4. Três forças em equilíbrio aplicadas em um ponto, regra do paralelogramo. (1 experiência)
5. Problemas de equilíbrio de forças aplicadas em fios. (2 experiências)
6. Corpo rígido. Momento de força em relação a um eixo. Verificação do
equilíbrio de momentos de forças aplicadas em um corpo rígido. (3 experiências)
7. Forças paralelas. Centro de gravidade de n forças distribuídas linearmente. (2 experiências)
8. Distribuição plana de pesos. Centro de gravidade de pesos distribuídos
em um plano. (2 experiências)
9. Problemas de equilíbrio de estruturas simples. Problemas de forças em
equilíbrio aplicadas em barra pesada, articulada. (3 experiências)
10. Atrito estático e cinético. Determinação experimental de coeficientes de
atrito. (2 experiências)
11. Experiências sobre balanças. (7 experiências)
12. Máquina de Atwood. (3 experiências)
13. Mesa giratória para determinação de momento de inércia. (5 experiências de momento de inércia)
14. Módulo de elasticidade. (3 experiências)
15. Movimento harmônico simples. (5 experiências)
16. Métodos de determinação da densidade de corpos. (4 experiências)
17. Determinação da tensão superficial da água. (2 experiências)
São ao todo cinqüenta (50) experiências fundamentais de Mecânica. ∗∗
∗∗
u À época da redação deste texto pelo Prof. Armando eram muito caros os equipamentos
para medidas cinemáticas para movimentos. Atualmente o Laboratório de Mecânica do I F́ da U E R J (IF–UERJ) dispõe de trilhos de
ar, com dispositivos para medidas eletrônica e interface para tratamento digital de dados. Esse
equipamento vem aumentar a capacidade de experiências em nossos laboratórios didáticos.
“ADT-MF” — 2005/11/7 — 8:51 — page 29 — #29
Capítulo 1
Método Científico
1.1
Observação e experimentação
O método científico começa com a observação, a qual consiste no exame atento
dos acontecimentos e fatos que se passam na natureza. 1
Por isso mesmo a observação implica uma seleção do que se deve observar
e na descrição do objeto e dos fatos observados; cada palavra empregada deve
ter uma definição precisa. Em qualquer ciência cada palavra tem significado
preciso, que dá uma idéia correta e exata do que foi definido. Uma das dificuldades de uma ciência é exatamente a definição do vocabulário empregado
(principalmente no que diz respeito aos conceitos mais fundamentais). Para
dificultar mais ainda o aprendizado, ocorre que muitas palavras empregadas
cientificamente pertencem também à linguagem comum, o que traz ao estudante a sensação falsa de que está entendendo o texto quando na realidade, por
ignorar a acepção correta das palavras empregadas, o máximo que consegue
é fazer uma idéia aproximada do texto, muitas vezes completamente falsa. O
estudante tem que se dedicar a aprender, a saber corretamente o significado das
palavras, a definição correta e a compreensão exata das grandezas, das leis, dos
postulados e axiomas, sem o que não poderá progredir no estudo por falta da
linguagem adequada.
Por outro lado, a observação dos fatos naturais deve ser registrada com
todo cuidado, num caderno de notas que o cientista deve ter sempre consigo
1
u Essa observação pode ter início por um projeto relacionado a um problema específico
ou mesmo por um acaso (caso raro), mas que somente será notado se o observador ou quem
analisa os dados experimentais estiverem “encucados” e preparados para esse aspecto específico. Acrescentamos o Ap. D como ilustração histórica.
29
“ADT-MF” — 2005/11/7 — 8:51 — page 30 — #30
30
Capítulo 1. Método Científico
nas ocasiões em que se dispõe a observar esses fatos. A memória humana é
falível e, pior ainda, ela altera os registros mentais, de acordo com noções e
preconceitos preestabelecidos. Por isso, o cientista não se fia na sua memória,
por melhor que seja, registrando sempre no caderno de notas as suas observações.
Finalmente, pode exprimir-se numericamente grande parte das observações, a precisão tornando-se muito maior conforme técnicas adequadas são
aprimoradas: a observação científica tende a ser quantitativa.
A observação pura e simples de fatos naturais é demorada, pois esses fatos não estão ocorrendo a toda hora, ou à vontade do observador. Por isso,
ele passa da observação à experimentação. Na experimentação, o observador
procura controlar os fatos, separá-los da influência de inúmeros outros, reproduzí-los à sua vontade e conveniência no Laboratório, ou na sala de experimentação. Deste modo poderá observar melhor, em condições ideais e com
instrumentos que aumentam o seu poder de observação; ajudando seus sentidos nessa tarefa, os instrumentos que usa não são mais do que dispositivos
ou meios para ampliar os seus sentidos. Assim o microscópio e o telescópio
ampliam sua visão, os amplificadores de áudio sua audição. A visão e a audição constituem os sentidos mais usados pelo homem na observação dos fatos.
Com o estudo e o desenvolvimento científico e tecnológico ele consegue detectar fatos e fenômenos para a percepção dos quais ele não possui sentido
algum; por exemplo: os raios cósmicos, as partículas α, β e γ que emanam dos
corpos radioativos, e também as ondas eletromagnéticas, não são percebidas
diretamente pelos sentidos humanos e constituem exemplos frisantes de como
o homem pode desenvolver novos “sentidos” para observar, estudar e controlar a natureza. Esses sentidos, nos casos citados, são os detectores de partículas
(contadores, cintiladores, etc.) e receptores de ondas eletromagnéticas.
O objetivo de toda Ciência é controlar, provocar e usar os fatos naturais
em benefício do Homem. Entretanto, existem fatos, eventos (acontecimentos)
naturais sobre os quais o homem não tem nenhum controle, nem pode levar ao
laboratório; como por exemplo, as manchas solares, os eclipses do sol e da lua,
o afastamento do periélio dos planetas, notavelmente o de mercúrio, etc., são
fatos cuja observação acurada pode conferir ao homem, pelo menos, o poder
de prever tais fatos ou eventos (eclipses do sol, manchas solares) o que já é um
resultado notável capaz de trazer-lhe grandes benefícios.
O estudante ouve freqüentemente que a Ciência deve ser estudada pela
Ciência, desenvolvendo pesquisa pura ou básica, não visando nenhum benefício. Isto porque ninguém pode prever em que direção se deve pesquisar ou
“ADT-MF” — 2005/11/7 — 8:51 — page 31 — #31
1.2. Causa e Efeito
até mesmo o que se deve pesquisar para realizar descobertas que num futuro
próximo ou mesmo remoto irão trazer benefícios ao Homem. Se os cientistas
só pesquisassem com a finalidade de realizar descobertas “utilizáveis”, cedo
o seu conhecimento estaria limitado, tornar-se-ia estanque, estiolar-se-ia 2 e se
tornaria estático e obsoleto: a sociedade tenderia a ser “perfeita” num dado estágio de sua evolução. Desenvolvendo o interesse, o amor pela pesquisa básica,
completamente desvinculada de suas possíveis aplicações práticas ou tecnológicas, o Homem está assegurando a continuidade do progresso científico e, por
conseguinte, o do tecnológico em um processo auto-alimentado.
1.2
Causa e Efeito
Um fato A pode ocorrer concomitantemente com outro B, ou antecedê-lo. Se
isso acontece sempre, isto é, se ocorrido A ocorre B, o observador em geral
supõe que a ocorrência de A acarreta a de B, ou diz que A é a causa de B, B
sendo o efeito do acontecimento A. Entretanto a simples ocorrência lado a lado
de dois fatos não significa que um seja a causa do outro, muitas vezes os dois
são efeitos de uma mesma causa que não é observada e que ocorrendo ocasiona
os dois fatos. Freqüentemente o Observador, ou Experimentador, tem imensa
dificuldade para discernir ou estabelecer a causa de um fato observado, e nisso
reside a sua perícia, habilidade ou “sorte”.
1.3
Hipótese
Para discernir a causa dos fatos, explicar a ocorrência de dois ou mais fatos
interrelacionados, o Observador faz hipóteses que não são mais do que afirmações sobre “como” ou “porque” os fatos ocorrem. 3 A hipótese pode ser
assim meramente descritiva, “fenomenológica”, ou pode ser “interpretativa”,
isto é, dizer porque ocorre, o observador tenta interpretar os fatos observados
descrevendo-lhes a causa da ocorrência.
A hipótese é meramente um auxiliar do observador, seja na própria Observação seja na Experimentação. O observador pode “testar” sua hipótese, verificando-lhe a validade quando introduz modificações nos fatos observados,
2
Estiolar – fenecer, definhar, enfraquecer, debilitar.
Mas para fazer tais hipóteses é preciso que o proponente saiba perguntar “como?”,
“por quê?”. A formação não pode acontecer por adestramento e sem senso crítico, o estudante
não deve simplesmente se deixar convencer ou simplesmente acreditar por acreditar no que se
diz ou afirma.
3
u
u
31
“ADT-MF” — 2005/11/7 — 8:51 — page 32 — #32
32
Capítulo 1. Método Científico
ou em um deles, a fim de verificar o que acontece com o outro. Se a hipótese
resistiu a todos os testes, passando a ser comprovada pelos fatos, se as “conseqüências” da hipótese são verificadas, ela passa a ser uma Teoria. O valor de
uma teoria está na previsão de novos fatos, de novas conseqüências, no valor
“heurístico”, 4 isto é, no seu poder de descobrir, de achar e de prever novos
fatos, o que conduz a um progresso do conhecimento, a novas experiências e a
um poder maior do Homem sobre a Natureza. Neste caso as teorias passam a
ser denominadas leis da Natureza: leis da Física, da Química, etc.
1.4
Modelo e Matemática
Muitas vezes o homem faz hipóteses baseando-se em analogias, procurando
descrever os fenômenos observados com base na semelhança com outros fenômenos. Assim, por exemplo, ele se vale de “modelos” mecânicos para explicar
fatos que nada têm a ver com a mecânica, a não ser propriedades formais. Na
física isso é freqüente, o modelo sendo uma “imagem” do “objeto” que deve
traduzir os fatos e fenômenos observados para um domínio cuja compreensão
é melhor ou mais fácil. Tais fatos são “observados”, muitas vezes, com aparelhagem extremamente complicada que exige equipes de especialistas para
ser adequadamente utilizada e sem a qual seria impossível a observação do
fenômeno em questão.
O modelo matemático também é usado; os fatos e grandezas traduzem-se
por variáveis e constantes matemáticas que se relacionam segundo os conhecimentos de um dado domínio da matemática. 5 As leis da Natureza são assim
expressas por uma linguagem matemática que lhes dão nova feição e permitem
o seu uso e desenvolvimento. Na Física, esse fato chega ao ponto de podermos
até mesmo afirmar que a “linguagem natural” da Física é a Matemática.
Para ilustrar o que se explicou anteriormente, vamos dar um exemplo trivial de como o Homem pode proceder para investigar, pesquisar e descobrir
fatos e leis. Ao escolher para ilustrar o “Método Científico” um exemplo trivial (§1.5), estamos querendo que o estudante possa participar tranqüila e ativamente da observação e da experimentação que ele poderá fazer até mesmo
em casa, com toda comodidade e facilidade, compreendendo-a nos mínimos
pormenores. O método que pretendemos desenvolver neste livro de Física se
4
Heurístico – do grego ύρισχω (heurisco) – descubro, verbo descobrir, passado
perf. ϋρηχα (heureca) – descobri, achei.
5
u Isto é, as relações entre grandezas físicas se dão por meio matemático, conforme a
opção original de Galileu.
“ADT-MF” — 2005/11/7 — 8:51 — page 33 — #33
1.4. Modelo e Matemática
baseia na compreensão, redescoberta e uso completo do conhecimento, seja
para resolver exercícios e problemas de aplicação desses conhecimentos, seja
para resolver problemas que impliquem numa nova aquisição de conhecimentos, isto é, na pesquisa científica. Vamos procurar manter-nos dentro desse
padrão, não descrevendo fenômenos ou conhecimentos que ainda não estejam
dentro da compreensão do estudante, procurando orientá-lo sem deslumbrá-lo
com maravilhas que a Ciência já colocou ao alcance do Homem, isso o estudante vê a cada momento da sua vida sem entender (ou mesmo perceber). O
que interessa ao estudante de Ciência é entender e poder participar da criação
de novas técnicas, de novas tecnologias, e da aquisição de novos conhecimentos. É necessário não confundir os objetivos. Suponhamos, por exemplo, um
silvícola trazido ao nosso meio urbano. Ao educá-lo para integrá-lo á nossa
civilização podemos fazê-lo com dois objetivos:
1o ) Dar-lhe um conhecimento da vida civilizada, mostrando-lhe as realizações da ciência e da Tecnologia. Ele, ao fim de algum tempo, estaria apto
a viver a vida urbana nos seus múltiplos aspectos, ligando a luz à noite,
abrindo a torneira para usar a água, acendendo o fogão à gás, sentandose à mesa e usando o garfo e a faca para comer, descarregando a válvula
da privada quando necessário, ligando e desligando o rádio e selecionando as estações transmissoras para ouvi-las. Poderia até mesmo fazer
consertos de bombeiro hidráulico e de eletricista sem ter noção mais
profunda dos fenômenos envolvidos; com dois ou três anos de aprendizado prático, poderia ser um torneiro razoável, serralheiro, carpinteiro
ou marceneiro; guiando carros e tratores, etc. Poderia usar a tecnologia
à sua disposição para trabalhar numa fazenda ou numa indústria, poderia
fazer tudo isso sem saber ler ou escrever, isto é, sendo analfabeto. Esse
objetivo poderia ser atingido num prazo de três (3) a quatro (4) anos.
Entretanto jamais poderia inovar a ciência, contribuindo para o avanço
do Conhecimento e da Tecnologia.
2o ) Educá-lo com o objetivo de transformá-lo num ser capaz de aplicar os
conhecimentos, de descobrir novos processos, materiais e máquinas, de
transformar a tecnologia, de descobrir, estudar, desenvolver e estabelecer
novos conhecimentos, isto é, com o objetivo de transformá-lo num Engenheiro ou num Cientista. Neste caso, teríamos que ensiná-lo durante
vinte (20) ou trinta (30) anos.
Ora, uma Escola Superior para formar Engenheiros, Matemáticos ou Físicos, não pode evidentemente se limitar a formar “manipuladores de máquinas
33
“ADT-MF” — 2005/11/7 — 8:51 — page 34 — #34
34
Capítulo 1. Método Científico
ou instrumentos”, o objetivo tem que ser mais elevado, superior; isso é possível
se o estudante está motivado, se deseja realmente desenvolver-se e adquirir formação para ser Engenheiro, Matemático ou Físico, e não para ser engenheiro
de operação ou um cientista apertador de botões sob as ordens de um Cientista
estrangeiro, americano, alemão, francês, russo, chinês, italiano ou japonês. É
fundamental e necessário que o estudante aspire mais alto, à Independência
Intelectual (Estratégica) e Científica para não ficar à reboque dos países que
cuidam muito bem da formação de seus cientistas.
A Formação de Cientistas traz a Independência Intelectual que é a base
sob a qual se assenta e alicerça a Independência Econômica e Política de um
; o método de ensino que estamos procurando desenvolver e divulgar visa
exatamente essa Independência Intelectual estratégica.
Entretanto convém lembrar ou advertir ao estudante que não existe caminho fácil, ou mágica, para substituir o seu esforço na aquisição de conhecimento e que não deve esperar milagres; deve, sim, dispor-se a observar, experimentar, praticar, estudar, reestudar, a Física, durante anos e anos; e, se vai
dedicar-se à Ciência, à Pesquisa Científica ou Tecnológica, como Físico, Matemático, ou como Engenheiro, deve saber que a aprendizagem só termina com a
Morte. Isso não significa porém nenhuma desvantagem do Cientista, muito ao
contrário, significa a certeza de que ele pode continuar produzindo, inovando,
aprendendo até aos oitenta, noventa ou cem anos, quando a morte sobrevenha.
Inúmeros são os exemplos, nesse particular, de Cientistas que conservaram
pleno vigor intelectual até idade avançada, quando o vigor da mocidade e da
idade madura já se foram há muito; entretanto o cérebro pode continuar mais
ativo e potente que nessas fases da vida.
Passaremos agora ao exemplo de construção de um modelo.
1.5
Exemplo de construção de um modelo: o peso dos
corpos
João e José estão conversando. São dois garotos do interior que vivem afastados da “civilização”. Moram com seus pais e pertencem a um clube de futebol
infantil organizado pelo capataz da Fazenda Boa Vista que em tempos idos
tinha sido “craque” de um “time” qualquer. São analfabetos, mas isso não impede a sua curiosidade, cheia de informações falsas, crendices e preconceitos.
Vejamos uma tradução para o que dizem.
– Os corpos têm peso, diz João, e quanto maior o corpo, maior
“ADT-MF” — 2005/11/7 — 8:51 — page 35 — #35
1.5. Construção de um modelo
o seu peso.
– Não acho, retruca José, conheço uma pedra que é muito leve
e, apesar de ser muito maior que as pedras redondas do rio,
pesa muito menos.
– Mas como é que você sabe que essa pedra pesa menos? Indaga João.
– Porque eu a levanto com um braço só, e há pedras no rio que
para serem levantadas exigem os meus dois braços, apesar
de serem menores, responde José.
– Hum! Mas onde se encontra essa pedra leve?
– Lá encima da montanha, responde José.
– Isso então não prova nada! Porque:
1o ) a pedra do rio está no rio, e a água pode influir no peso
dela e,
2o ) a outra pedra está na montanha e a montanha pode empurrar a pedra para cima, argumentou João.
– Bobagem, responde José. A água não faz os corpos mais pesados e a montanha não faz nenhum corpo mais leve, pontificou José.
– Além disso, diz João, sem dar atenção a José, você mora na
montanha e levanta a pedra de manhã. Quando vai ao rio,
tomar banho, já é de tarde. Ora, todo mundo sabe que os
corpos são mais leves de manhã e mais pesados de noite.
José fica sem saber o que responder, pois sabia que de manhã realmente
ele conseguia levantar corpos que à noite não levantava, o que parecia mostrar
que os corpos à noite aumentavam de peso. Saiu da discussão aparentemente
vencido, mas não convencido. Era teimoso. Começou a pensar. Naquele dia
não correu, não jogou bola, não carregou nada. E assim chegou a noite. Voltou
para casa passando perto da pedra que levantava pela manhã mas que à noite
não conseguia erguer. Aproximou-se dela, segurou-a e tentou erguê-la. Qual
não foi o seu espanto quando pôde levantá-la até a cintura. Olhou em volta
para certificar-se de que já era noite. Tentou novamente e o conseguiu. Não
havia dúvida, podia levantar a pedra à noite! Entrou em casa e se sentou para
pensar.
35
“ADT-MF” — 2005/11/7 — 8:51 — page 36 — #36
36
Capítulo 1. Método Científico
Comparou todas as observações que havia feito até então. Sempre que tentava levantar a pedra à noite, tinha percorrido a floresta o dia inteiro, carregando caça ou frutas. Achava-se muito cansado à noite. Isso explicava porque
não conseguia levantar a pedra à noite, quando de manhã o conseguia. Não era
porque a pedra aumentava de peso à noite, ficando mais pesada, mas, sim, porque se achava mais cansado e não podia com o seu peso. Ficou radiante porque
afastara o principal argumento do João. Às favas com essas experiências, não
podia se basear nas impressões dos seus sentidos, eram enganosas e variavam com o estado do seu corpo. Tinha que arranjar um processo para pesar os
corpos que fosse independente dele, de seus sentidos, de sua disposição.
José chegara assim à conclusão de que tinha de ser “objetivo”, de que o
conhecimento “subjetivo” era muito precário e muitas vezes falso. Tinha que
evitar a “subjetividade” e desenvolver a “objetividade”, o conhecimento por
meio da experimentação tinha que ser obtido por processo que não dependesse
do “sujeito”, do observador, mas que se restringisse ao domínio do objeto, fora
do sujeito, isto é objetivo.
Mas o problema do José era exatamente arranjar esse método, esse processo objetivo para pesar os corpos. Como fazer?. . . Um mês se passou sem
que José afastasse o problema da cabeça. Retomou sua lide diária. Evitava o
João por todos os meios, pois não queria perder tempo com discussões estéreis. E assim, já em casa, mais cedo, um certo dia, ao pôr do sol, contemplava
a exuberante floresta que se estendia à perder de vista, quando sua atenção foi
atraída por um pássaro que veio pousar no galho de um arbusto que crescia
perto de sua casa. O galho vergou sob o peso do pássaro. Um segundo pássaro
Figura 1.1: Uma fonte de inspiração.
pousou perto do primeiro e o galho vergou mais ainda. José se sobressaltou
com a idéia que lhe atravessou a mente. Os pássaros voaram assustados (com a
“ADT-MF” — 2005/11/7 — 8:51 — page 37 — #37
1.6. Confecção de uma caixa de pesos
presença de um predador, não com as idéias de José), o galho voltou à posição
inicial. José vislumbrou a solução do seu problema. Mas teria ainda muito trabalho até chegar a solução completa. Não perdeu tempo, percebeu que tinha de
passar da mera observação para a experimentação. Entrou no seu “laboratório”
e começou a preparar o dispositivo para estudar o problema da deflexão do galho, adaptado para a deformação de uma haste metálica fina, ou simplesmente,
para estudar o problema da deflexão da haste. A história está pitoresca, mas a
encerramos por aqui.
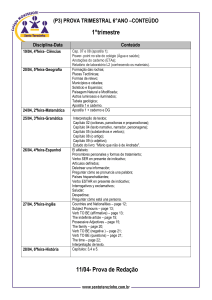
Nas páginas seguintes damos o esquema do dispositivo em sua feição moderna e sofisticada, veja Fig. 1.1 e Fig. 1.2.
Este é o “fato bruto” observado por José, “deflexão de galho produzido
pelo peso de um pássaro”. Na sua oficina e laboratório, ele transformará o
fato bruto num fato científico, arranjando os dispositivos que se vêem na Fig. 1.2. Poderá agora estudar a deflexão da haste em função do peso, registrando
suas observações e experiências, à hora que quiser e com toda comodidade,
controle e precisão, sem efeitos espúrios e influências diversas, até mesmo de
modo mais anti-séptico 6 .
1.6
Observação e experimentação 7
Nesta seção estudaremos (intuitivamente) a medição de grandezas físicas, a lei
de interdependência entre duas grandezas físicas, função, gráfico de uma função, função linear e interpolação. O tratamento mais sistemático é apresentado
no Cap. 12.
1.6.1
Observação
Uma haste presa em uma extremidade se flete (flexiona, sofre uma deflexão,
se encurva) sob a ação de um peso na outra extremidade, por exemplo um
6
u Será que esse efeito que pássaros provocam em galhos finos de árvores ocorre apenas
com passarinhos? Com passarinhos e galhos finos? Quando se prende outro objeto ao galho,
observa-se também a deformação do galho? Afinal, poderia não ser assim, não é? Mas é. Assim
se observa quando se investiga a natureza. . . deve-se ter cuidado com o óbvio e com preconceitos. Mudando o tipo e a forma do corpo que se prende ao galho, observa-se sempre deformação?
Bem, se se considera o conceito abstrato do que possuem em comum os corpos que provocam
deformações nos galhos, então se é levado a considerar uma grandeza física, que se chama força
peso. Esse efeito só se observa quando se prende um corpo? ou observa-se também quando se
puxa ou levanta-se o galho?
7
Confecção de uma caixa de pesos.
37
“ADT-MF” — 2005/11/7 — 8:51 — page 38 — #38
38
Capítulo 1. Método Científico
Figura 1.2: Esquema para a deflexão da haste: (1) base retangular da estrutura;
(2) hastes longas para formar a estrutura; (3) ponteiro que serve de haste para estudo da deflexão; (4) anel para fixação da haste longa; (5) pegadores de fixação de
estrutura; (6) parafusos de fixação; (7) régua milimetrada para medição da deflexão;
(8) base redonda para suportar a régua; (9) mesa ou bancada ; (10) peso p.
“ADT-MF” — 2005/11/7 — 8:51 — page 39 — #39
39
1.6. Confecção de uma caixa de pesos
pássaro ao pousar em um galho fino faz o galho curvar-se, deformar-se. Este
é um “fato bruto” observado.
Da observação de um pássaro curvando um galho com seu peso, passase à experimentação no laboratório com aparelhagem e dispositivos especiais.
Veja Fig. 1.2. O fato bruto observado passa a um fato científico comprovado
experimentalmente no laboratório.
1.6.2
Deflexão da haste em função do peso
Pode-se medir a deflexão da haste pelo deslocamento d de sua ponta, referida
a uma régua. Quando num certo ponto P da haste se colocam pesos p, esperase ter uma função d = f (p). Trata-se, portanto, de determinar a função f e
construir uma caixa de pesos conhecidos
p1 , p2 . . . pn .
Surge um problema Como determinar a função f que relaciona o peso p
com a deflexão d, se não temos pesos conhecidos? Como obter pesos conhecidos? Vejamos.
1. Ao se colocar um peso ao longo da haste, verifica-se que o deslocamento
da ponta aumenta quando o peso se aproxima da extremidade livre L da
haste.
2. Deste modo, tomando-se um objeto A, o peso desse objeto causará um
deslocamento da extremidade L da haste, o qual varia entre zero e um
máximo quando o peso está junto da extremidade livre L, isto é, na extremidade da haste oposta àquela que está presa à estrutura que a sustenta.
Chamamos o deslocamento da extremidade livre L da haste de deflexão
da haste, ou simplesmente deflexão.
3. O objeto A poderá ser tomado como padrão, e, por comodidade, seu
peso será a unidade de peso, que indicaremos 8 por u. O objeto A é arbitrariamente escolhido, o critério para sua escolha sendo qualquer 9 . Por
exemplo, pode-se escolher um objeto que, quando colocado no ponto P
8
u Como não se trata de unidade SI, não estaremos usando para essa unidade o estilo de
notação recomendada pelo SI.
9
u Desde que o peso de A não seja tão pequeno que não se observe deformação da haste,
ou que não seja tão grande para que não provoque deformação permanente da haste.
“ADT-MF” — 2005/11/7 — 8:51 — page 40 — #40
40
Capítulo 1. Método Científico
da haste próximo de L, dê uma deflexão de 1 mm. Deste modo a unidade
de peso escolhida dará uma unidade de deflexão 10 .
4. Convém observar se a deflexão cessa quando se retira o objeto A da
haste, isto é, se ao se retirar o objeto A do ponto P (livrando-o da haste),
a ponta da haste volta para a mesma marca da régua – cessada a causa, cessa o efeito. Deve-se repetir várias vezes a experiência para ver se
isso acontece. No caso da ponta da haste não voltar para a mesma marca,
deve-se ajustar a haste no anel, apertando-a.
5. Agora se faz um padrão secundário, tomando-se um outro objeto A1 que,
colocado no mesmo ponto P da haste, dê a mesma deflexão 11 de 1 mm.
Consegue-se, desse modo, ter vários objetos com o mesmo peso 12 de A;
para facilitar a tarefa de conseguir padrões secundários, pode-se tomar
um objeto A01 que dê uma deflexão maior que 1 mm, por exemplo 1,1 mm
ou 1,2 mm; em seguida retira-se um pedacinho do corpo, limando-o ou
raspando-o por exemplo, e se verifica se então ele dá a mesma deflexão
de 1,0 mm; em caso contrário, torna-se a raspar o corpo, até se obter a
mesma deflexão 13 de 1,0 mm.
6. Ora, é plausível que o “o peso de dois (2) objetos de pesos iguais tenha
valor duas vezes maior que o peso de um (1) só”, ou ainda, “o peso
de dois objetos é igual a soma dos dois pesos”. Este enunciado é um
postulado, não temos meio de comprová-lo. Tomando entretanto essa
asserção como verdadeira, prosseguimos 14 .
10
u Esse é apenas um exemplo, não há qualquer necessidade de se associar a unidade de
peso à unidade de comprimento adotadas, é apenas para fixar idéia.
11
u Será necessário mesmo usar um outro corpo que provoque a mesma deformação?
Usar a marca de 1 mm e anotar dessa forma a medida é um bom procedimento para comparar
os pesos? Note-se que se deve anotar a deformação correspondente à unidade de peso adotada,
mas essa deformação não precisa ser correspondente a 1,0 mm.
12
u Essa igualdade só pode ser concluída depois que se verifica que a função f que estamos
nos preparando para levantar é uma função monótona (crescente), ou seja, quando se constata
que para pesos maiores, a deformação é maior – o que não significa, de antemão, que essa
função seja linear.
13
u Perceba o leitor o cuidado em detalhar a obtenção do segundo padrão de peso, perceba
ainda a sutileza com que indica (desperta) a necessidade de se estimar o décimo de milímetro
quando se usa uma régua graduada em milímetro.
14
u A única comprovação, o único teste possível, é a consistência da teoria desenvolvida!
Mas desse só temos notícia ao final! Esse postulado terá reflexo na regra do paralelogramo para
composição de forças.
“ADT-MF” — 2005/11/7 — 8:51 — page 41 — #41
1.7. Grandeza Física: medição e medida
7. Colocando na haste dois padrões, A e o secundário A1 , amarrados na
mesma posição P, admitindo o postulado anterior, obteremos uma deflexão que corresponderá a um peso igual a duas (2) unidades u, ou seja,
o peso 2 u. Isto é, d2 = f (2 u).
8. Tendo a (medida da) deflexão d2 , podemos agora obter um corpo A2 que
dê a mesma deflexão que d2 , e portanto que tenha o peso igual 15 a 2 u.
Deve-se verificar se o ponto L da haste retorna sempre para a mesma
posição em que estava antes de colocarmos o peso, depois que ele é
retirado 16 .
9. O corpo A2 e o corpo A, pelo postulado anterior, têm juntos um peso
igual a 3 u, i.e., A2 e A1 formam juntos um corpo A3 cujo peso é 3 u; e A,
A1 , A2 juntos têm peso igual a 4 u. Um corpo A4 que forneça a mesma
deflexão d4 , que dariam juntos os corpos A1 A2 e A3 , terá peso igual a
4 u. Por sua vez, A4 junto com A2 dará uma deflexão 6 u. Vemos que
desse modo podemos obter múltiplos (inteiros) da unidade u associada
ao corpo A, isto é, os corpos A1 , A2 , A3 , A4 . . . An , fornecem-nos os
pesos 1 u, 2 u, 3 u, 4 u . . . n u. Com n inteiro qualquer (até o limite em
que a haste não sofra deformação permanente).
Construímos assim uma caixa de pesos. Para montar outra caixa de pesos,
com economia de material, mas que possa ser usada em outras experiências,
formando todos os múltiplos inteiros de 1 u entre 1 u e 30 u, basta que se confeccione: 17 um (1) corpo de peso 1 u, dois (2) corpos de peso 2 u, um (1) corpo
de peso 5 u, dois (2) corpos de peso 10 u, para conseguir múltiplos inteiros até
50 u, basta acrescentar um corpo de peso 20 u.
1.7
Grandeza Física: medição e medida
Podemos agora resolver o problema de determinar a forma da função d = f (p).
Para abreviar e dar precisão à linguagem empregada devemos introduzir definições e termos novos, cujo significado seja bem preciso. Assim, por exemplo,
o peso p e a deflexão da haste podem ser medidos, isto é, compara-se o peso
do corpo com o peso do padrão dizendo-se, por meio da deflexão produzida,
15
16
As mesmas causas produzem os mesmos efeitos.
u Caso contrário, não teríamos como verificar as mesmas causas associadas aos mesmos
efeitos.
17
u
É por essa razão que se você receber uma cédula de R$ 30,00, não a aceite. É falsa!
41
“ADT-MF” — 2005/11/7 — 8:51 — page 42 — #42
42
Capítulo 1. Método Científico
quantas vezes o peso p é maior (ou menor) que o do padrão. O mesmo se verifica relativamente à deflexão: uma deflexão d1 é de 2 mm, outra d2 é de 5 mm;
a deflexão de 1 mm seria a deflexão unitária, correspondendo ao peso unitário
(no nosso exemplo). O peso e a deflexão da haste são denominados grandezas
físicas – uma grandeza física sendo tudo aquilo que pode ser medido (fisicamente). O processo de medir uma grandeza se denomina medição. Ao colocar
o peso na marca (P) da haste e ler a deflexão para saber quantas vezes o peso é
maior (ou menor) que o padrão, estamos efetuando uma medição e o resultado
obtido p3 = 4u se denomina medida da grandeza p3 .
Desse modo, estamos procurando um processo para medir o peso dos corpos. O aparelho que permite essa medição se denomina dinamômetro: dínamo – força, e metro – medida.
Esse problema de medir uma grandeza não é tão simples. De modo prático,
poderíamos ter uma série de pesos p1 , p2 . . . pn , conhecidos relativamente ao
padrão que produzissem deflexões tabeladas; para se ter o peso de um corpo
qualquer, bastaria ver a deflexão que ele provocaria na haste e procurar na tabela qual o múltiplo do padrão que daria a mesma deflexão, e portanto que
teria o mesmo peso que o do corpo. Teríamos assim um método prático para
determinar o peso dos corpos. Entretanto o problema só estaria resolvido completamente se encontrássemos a forma da função d = f (p), pois um peso p
qualquer poderia dar uma deflexão que não figurasse na tabela. Observe-se
que a cada peso p vai corresponder uma (1) deflexão d, e a cada d deve corresponder um (1) peso p. Há uma correspondência entre o conjunto dos pesos e o
das deflexões, expressa simbolicamente por d = f (p).
1.8
Função de uma variável
A função f que a cada valor de p faz corresponder um único valor de d se
chama função unívoca. Vice-versa, se (para a função f ) a cada valor de d corresponde um único valor de p, dizemos que existe a função inversa de f , e
a correspondência entre o conjunto dos pesos e o conjunto das deflexões é
unívoca nos dois sentidos, e se denomina biunívoca entre os pesos e as deflexões.
Observa-se facilmente que a haste não suportará qualquer peso em sua
extremidade sem se deformar permanentemente, isto é, colocado um peso pM
na haste, produz-se uma deformação tal que, ao ser retirado o peso, a ponta da
haste não volta mais para a marca inicial. Haverá assim um valor máximo do
peso pm que não provoca deformação permanente da haste (já que a função f é
“ADT-MF” — 2005/11/7 — 8:51 — page 43 — #43
1.9. Lei de interdependência entre grandezas físicas
crescente). Sendo assim, os pesos que darão a deflexão na haste poderão variar
de 0 a esse valor pm , o peso máximo que não provoca deformação permanente.
Matematicamente se diz que a função f = f (p) é definida para os valores de p
compreendidos no intervalo de 0 a pn (sendo pn ≤ pm ), ou simbolicamente p ∈
[0, pn ], a chave indicando que os valores extremos do intervalo estão incluídos
no conjunto de definição da função, ou domínio da função como também é
chamado.
Simbolicamente se põe: d = f (p) para p ∈ [0, pn ], que se lê “d é uma função
de p para p pertencente ao intervalo de 0 a pn ”. O símbolo ∈ se lê “pertence
a”, é o sinal de pertinência.
1.9
Lei de interdependência entre grandezas físicas
Em física se diz que a função f exprime a lei de interdependência entre as
duas grandezas: peso e deflexão; sendo assim, determinar a forma da função
f é achar a lei física que relaciona a deflexão da haste com o peso que a provoca. Aparentemente este problema é muito simples, veremos mais adiante
que ele não é tão simples assim. Para não trazer complicação no atual estágio,
ficaremos dentro do seguinte fato observado:
“Uma dada haste presa por uma extremidade se flexiona sob a
ação de pesos colocados na outra extremidade e cessada a ação
do peso cessa a deflexão, desde que o peso não tenha atingido um
valor grande o suficiente para ocasionar deformações ou modificações permanentes na forma da haste”.
O objetivo será estudar essa deflexão em função do peso para obter com esse
estudo um processo para “pesar” os corpos. 18
Vimos como se pode construir a caixa de pesos, mesmo sem saber a forma
da função que relaciona o peso com a deflexão e agora, tendo os pesos p1 ,
p2 . . . pn conhecidos, registramos as deflexões d1 , d2 . . . dn que lhes correspondem quando colocamos esses pesos na marca junto à extremidade L da haste.
Para sistematizar esse estudo construímos um quadro ou tabela contendo todos
os pesos usados na experiência e as respectivas deflexões.
A fim de nos expressarmos sem dificuldades, convém dar um nome a nossa
unidade de peso. Esse nome é escolhido por convenção, arbitrariamente. Por
exemplo, suponhamos que a pessoa que iniciou esse estudo se chama José; em
18
u Note-se que não se definiu peso, estamos usando o conceito intuitivo de peso, relaci
onado com o da experiência do dia-a-dia, leigo.
43
“ADT-MF” — 2005/11/7 — 8:51 — page 44 — #44
44
Capítulo 1. Método Científico
homenagem a ela, vamos convencionar que o nome da unidade que estamos
usando para nossa caixa de pesos se chamará josé (letra minúscula por se tratar
de nome de unidade), e que a mesma será representada por Jo. É convenção
internacional formar o símbolo usando a inicial do nome proposto com letra
maiúscula por se tratar de nome de pessoa, a segunda letra é para evitar confusão com símbolos já definidos; no caso do metro, o símbolo é a inicial da
palavra metro, letra minúscula porque esse nome não provém de nome de pessoa. Essa convenção é internacionalmente adotada, assim há várias grandezas
e símbolos formado por letras maiúsculas porque derivam de nome de pessoas,
por exemplo:
V : volt, em homenagem ao físico Colta Alessandro Volta (1745–1827);
A : ampère, em homenagem ao físico André-Marie Ampère (1775–1836);
J : joule, em homenagem ao físico James Prescott Joule(1818–1889);
W : watt, em homenagem ao físico James Watt (1736–1819);
N : newton, em homenagem ao físico Isaac Newton (1642–1727);
T : tesla, em homenagem ao físico Nikola Tesla (1856–1943);
Wb : weber, em homenagem ao físico Wilhelm Eduard Weber (1804–1891);
Hz : hertz, em homenagem ao físico Heinrich Hertz (1857–1894);
Pa : pascal, em homenagem ao físico Blaise Pascal (1623–1662), etc.;
e outros símbolos com letras minúsculas por derivarem de outras palavras,
não nomes próprios, em geral de palavras gregas, por exemplo: dyn (dina), kg
(quilograma), erg (erg), etc. 19
No alto da Tab. 1.1, colocam-se a legenda do que registra cada coluna e
a unidade correspondente representada por seu símbolo; no nosso caso, Jo na
da coluna correspondente à grandeza peso, que é a variável independente da
função d = f (p), e mm na coluna correspondente à grandeza deflexão, que é a
variável dependente da função f .
No nosso exemplo, a ponta da haste indica a divisão `0 = 31,0 mm da régua,
para o peso igual a 0. A medida da deflexão di = `i −`0 , em que `i é a divisão
da régua correspondente ao peso pi .
19
u
Note-se, p. ex., que a unidade K g significa “kelvin grama”, e não, quilograma.
“ADT-MF” — 2005/11/7 — 8:51 — page 45 — #45
45
1.10. Eixos coordenados
Tabela 1.1: Interdependência entre peso e deflexão.
Peso – p
(Jo)
0
1
2
3
4
5
Deflexão – d
(mm)
0,0
1,0
1,9
2,9
4,0
5,1
Em seguida a cada leitura da deflexão retirava-se o peso para verificar se a
ponta voltava para a divisão `0 da régua.
Com medições cuidadosas para evitar “erro grosseiro”, obtivemos o quadro
de valores das grandezas interdependentes, peso e deflexão.
Para medir os pesos dos corpos podemos usar a haste e a tabela
que deve acompanhá-la para que ela sirva de dinamômetro. Construímos um medidor de pesos, empiricamente, sem conhecer as
leis físicas em jogo.
Entretanto, como os valores que levantamos para montar a tabela são limitados a alguns múltiplos inteiros do padrão, pode haver corpos cujos pesos
não dêem exatamente as mesmas deflexões desses múltiplos, e que, portanto,
deverão corresponder a pesos diferentes. Somente achando a forma da função
d = f (p) e a sua função inversa p = φ(p) é que teríamos resolvido o problema.
A matemática vem em nosso auxílio fornecendo métodos e processos para
resolver o problema. Há métodos especiais para se obter, com os valores da
Tab. 1.1, a forma da função d = f (p). Um dos mais usados é obter primeiro o
gráfico da função e, a partir do gráfico, a função.
Vejamos como se faz o gráfico. 20
1.10
Correspondência entre ponto da reta e número
real, eixos coordenados
Para fazer o gráfico de uma função vamos introduzir algumas noções de geometria e análise.
20
u A intensão neste estágio é apresentar intuitivamente o problema de “ajuste de curvas”;
no §12.7 é apresentado formalmente o método dos mínimos quadrados.
“ADT-MF” — 2005/11/7 — 8:51 — page 46 — #46
46
Capítulo 1. Método Científico
P−4
P−3
P−2
P−1
O
P1
P2
+1
+2
υ
−4
−3
−2
−1
0
Pr
P3
P4
+3
+4
X
Figura 1.3: Eixo Ox associado à reta X.
Tomemos uma reta X desenhando-a da esquerda para direita, veja Fig. 1.3.
Dividamos essa reta em duas semi-retas por um ponto O, serão a semi-reta da
direita e a semi-reta da esquerda. Agora, escolhendo um segmento de reta υ
(letra grega upsilon) que tomaremos como segmento unitário e na semi-reta da
direita, a partir de O, marquemos segmentos múltiplos (inteiros) desse unitário;
isto significa determinar pontos P1 , P2 . . . Pn sobre a semi-reta da direita e tais
que os segmentos:
OP1 seja igual a 1 υ, OP2 = 2 υ, OP3 = 3 υ . . . OPn = n υ .
Na semi-reta da esquerda façamos a mesma coisa, mas indiquemos os pontos
pelos números inteiros P−1 , P−2 . . . P−n , da direita para a esquerda.
Observe-se que com esse processo estabelecemos uma correspondência
entre os números inteiros (positivos e negativos) e pontos da reta, de tal modo
que a cada inteiro corresponderá um único ponto sobre a reta X. Sendo, assim,
a correspondência entre o conjunto dos números inteiros (Z) e pontos da reta
(X) é uma correspondência unívoca. A correspondência não é porém unívoca
no sentido inverso, isto é, há muitos pontos sobre a reta que não são representados por números inteiros a partir dessa correspondência. Por exemplo, entre
os pontos P2 e P3 existe o ponto Pr na mediatriz do segmento P2 P3 que não
pode ser representado por nenhum número inteiro por meio dessa correspondência. Mas o segmentos OPr é igual a 2υ + 21 υ = (2 + 12 )υ = 52 υ = 2,5υ.
Desse modo, podemos representar outros pontos da reta por números racionais
(Q), os números racionais são aqueles que podem postos sob a forma de fração
própria (p. ex., 3/4) ou imprópria (p. ex., 6/5), isto é, r é racional se pode ser
posto sob a forma qp , sendo p e q inteiros. Entretanto, ainda haverá pontos da
reta que não terão números para representá-lo por meio da correspondência
que estamos considerando. A correspondência estará completa
se introduzir√
mos nessa representação os chamados irracionais, como 2, que não pode ser
representado por nenhum número racional. Você sabe demonstrar isto?
O conjunto formado pelos números inteiros (Z) que estão incluídos nos
racionais do tipo, por exemplo 31 = 62 = 93 = 3 (que é uma fração de quo
“ADT-MF” — 2005/11/7 — 8:51 — page 47 — #47
47
1.10. Eixos coordenados
ciente inteiro), pelos racionais e pelos irracionais positivos e negativos forma
o conjunto (R) dos números denominados números reais. Deste modo, pode-se estabelecer uma correspondência biunívoca entre os pontos da reta 21 e
os números reais, a cada ponto da reta vai corresponder um número real, e
vice-versa, a cada número real vai corresponder um ponto da reta.
Denomina-se eixo a reta dividida em duas semi-retas, a da direita e a da esquerda, a cada uma correspondendo sinal positivo ou negativo; é o mesmo que
se tivéssemos definido um sentido de percurso sobre ela como sendo positivo,
por exemplo, o sentido da direita para a esquerda; o sentido contrário, da esquerda para a direita, como negativo. É conveniente indicar o sentido positivo
colocando uma ponta de flecha sobre a reta:
0
-.
Diz-se que a reta está orientada, deste modo, um eixo é uma reta orientada:
pode-se estabelecer uma correspondência biunívoca entre os pontos da reta
orientada e o conjunto dos números reais (R).
Agora tomemos dois eixos ortogonais cujas origens O coincidam. Veja
Fig. 1.4. Vamos indicar um número qualquer sobre a reta que se estende da
esquerda para direita por x e chamá-la de eixo das abscissas (Ox) ou eixo dos
x, o outro de eixo das ordenadas (Oy) ou eixo dos y, letra com que se indicará
qualquer número real correspondente a um ponto desse eixo. A orientação
positiva do eixo dos y sendo para “cima” e a negativa para “baixo”. Posto isso,
observemos que o plano ficou dividido em 4 setores iguais ou quadrantes:
1o quadrante compreendido entre as semi-retas positivas +Ox e +Oy;
2o quadrante compreendido entre a semi-reta positiva +Oy e a semi-reta negativa −Ox;
3o quadrante compreendido entre as semi-retas negativas −Oy e −Ox;
4o quadrante compreendido entre a semi-reta negativa −Oy e a semi-reta positiva +Ox.
Com esse sistema de eixos podemos estabelecer uma correspondência biunívoca entre o conjunto dos pontos do plano e os pares ordenados de números
reais x, y que se representam entre parêntesis (x, y). O par se diz ordenado
21
lhada.
A reta considerada como o conjunto de todos os seus pontos é denominada ponti-
“ADT-MF” — 2005/11/7 — 8:51 — page 48 — #48
48
Capítulo 1. Método Científico
y6
+4
P2
q
q
+3
P1
+2
+1
−4
−3
−2
−1
O
+1
+2
+3
+4
x
−1
−2
q
P3
−3
q
P4
−4
Figura 1.4: Eixos cartesianos retilíneos ortogonais.
porque a primeira coordenada x representa o número sobre o eixo Ox, a segunda coordenada y representa o número sobre o eixo Oy. A correspondência
será definida do seguinte modo: seja por exemplo o ponto P1 no primeiro quadrante; pelo ponto P1 traçamos uma paralela ao eixo Oy que corte o eixo Ox
no ponto de abscissa x = +2; traçamos ainda por P1 uma paralela a Ox que
corte o eixo Oy no ponto de ordenada y = +3. O ponto P1 será representado
pelo par ordenado (x1 , y1 ) = (+2, +3), omitindo-se, em geral, o sinal positivo.
Todos os pontos do primeiro quadrante são representados por pares ordenados
de números reais positivos.
No segundo quadrante o ponto P2 , por exemplo, será analogamente representado pelo par ordenado (x2 , y2 ) = (−2, 3). Todos pontos do segundo quadrante são representados por um par ordenado em que a primeira coordenada
é um número real negativo (x ∈ R− ) e a segunda coordenada é um número real
positivo (y ∈ R+ ).
No terceiro quadrante o ponto P3 , por exemplo, será analogamente representado pelo par ordenado (x3 , y3 ) = (−2, −3). Todos pontos do terceiro quadrante são representados por um par ordenado em que as duas coordenadas são
números reais negativos (x, y ∈ R− ).
Finalmente, no quarto quadrante o ponto P4 , por exemplo, será represen
“ADT-MF” — 2005/11/7 — 8:51 — page 49 — #49
1.10. Eixos coordenados
tado pelo par ordenado (x4 , y4 ) = (2, −3). Todos pontos do quarto quadrante
são representados por um par ordenado em que a primeira coordenada é um
número real positivo (x ∈ R+ ) e a segunda coordenada é um número real negativo (y ∈ R− ). Tanto a abscissa como a ordenada do ponto se denominam
coordenadas do ponto. Como os eixos são retilíneos e ortogonais eles são
denominados de sistema de coordenadas retilíneas ortogonais, ou ainda sistema cartesiano ortogonal. O termo cartesiano provém do nome do inventor
do sistema de coordenadas, René Descartes (1596–1650), filósofo, matemático e físico francês, inventor do sistema de coordenadas e da geometria que
daí se deriva, denominada geometria cartesiana ou geometria analítica; os eixos cartesianos (retilíneos) podem ser ortogonais ou oblíquos.
Agora voltemos à nossa Física.
Já vimos que temos duas grandezas interdependentes d e p, a cada valor
de p corresponderá um único valor de d e vice-versa. 22 Na Tab. 1.1, pág. 45,
podemos ver que a 1 Jo corresponde inicialmente uma deflexão de 1,0 mm, de
modo geral, p1 corresponde a d1 , p2 a d2 , p3 a d3 . . . e pn a dn . Temos assim
pares de valores p e d. Podemos com eles determinar um ponto no plano do
seguinte modo:
tomamos os dois eixos ortogonais como foi indicado; no eixo das
abscissas, eixo dos x, colocamos os valores da variável independente p (daí o eixo dos x vira o eixo dos p), e no eixo das ordenadas, eixo y, os valores correspondentes da variável dependente d
(daí, o eixo dos y vira o eixo dos d).
Temos assim uma sucessão de pontos no plano.
Se os pesos variassem de 21 Jo em 12 Jo, obteríamos pontos intermediários
na Tab. 1.1. Observe-se que se os pesos variassem continuamente, deveríamos
obter uma infinidade de pontos ligando os pontos do gráfico da figura para os
valores obtidos. Entretanto, sendo a precisão da medida pequena, ao acrescen1
tarmos, por exemplo, 10
de Jo ao peso p1 deveríamos ver a ponta da haste se
1
1
deslocar de 10 mm aproximadamente; ora, 10
de mm é muito difícil de discernir à vista desarmada, e talvez nada se veja usando a régua milimetrada. Esse
valor já está dentro do erro de medição. A sucessão dos pontos assim obtidos
delineia uma “curva” que é o gráfico da função d = f (p). No caso da deflexão da haste, essa curva é um segmento de reta que passa pela vizinhança da
origem, pois, a p = 0 corresponde d = 0.
22
u Afinal, pode-se verificar que a função que estamos procurando é sempre monótona
crescente, i.e.; variando-se uma, a outra também varia, de modo sempre crescente (ou sempre
decrescente, se se considera a altura da extremidade da haste).
49
“ADT-MF” — 2005/11/7 — 8:51 — page 50 — #50
50
Capítulo 1. Método Científico
É fácil agora obter a forma da função d = f (p), sendo seu gráfico um
segmento de reta, ela deve ser da forma:
d=kp
(1.1)
em que k é uma constante a determinar. De fato, para o peso p = 0 está associado à deflexão d = 0; para 23 p1 = 1 Jo, d1 = 1,0 mm, logo substituindo em (1.1),
vem: 1,0 mm = k 1 Jo, do que se segue que k = 1 mm/Jo. Portanto a expressão
da função que procurávamos será:
mm d= 1
p.
(1.2)
Jo
. Para p = 2 Jo, obtemos: d = 1 mm Jo−1 ×2 Jo = 2 mm; na Tab. 1.1, para
p = 2 Jo a deflexão é 1,9 mm, o que está dentro do erro de 0,1 mm.
. Para p = 4 Jo, obtemos: d = 1 mm Jo−1 ×4 Jo = 4 mm, que coincide com
o valor da Tab. 1.1.
A função d = f (p) está assim determinada e exprime a lei de interdependência entre o peso e a deflexão da haste nas condições descritas. Matematicamente devemos escrever:
mm
d = k p ; p ∈ [0, pn ] , k = 1
.
(1.3)
Jo
Observe-se que essa expressão só é válida dentro dos limites expressos no
intervalo de 0 a pn . Se colocássemos um peso p = 5 pn é certo, para a haste que
estamos usando, que a haste se deformaria de modo permanente, dando uma
deflexão completamente fora do valor dado pela equação (1.3).
Observe-se também que os expoentes de p e de d são iguais a 1 (um). Dizse neste caso que a função é linear, seu gráfico é uma reta que “passa” pela
origem, veja Fig. 1.5.
A posição da ponta da haste para o peso nulo é `0 = 31,0 mm, conforme
medida pela régua milimetrada fixada em relação a estrutura que sustenta a
haste, e para qualquer peso é `; por exemplo, para p4 = 4 Jo a posição é `4 =
35,0 mm, a deflexão sendo d4 = `4 − `0 = 4,0 mm. De modo geral, temos:
d = ` − `0 , e substituindo em (1.1), podemos escrever:
` − `0 = k p
ou
` = k p + `0 ,
23
u Lembra-se que adotamos a unidade de peso josé (Jo) de tal modo que provocasse a
deflexão de 1,0 mm na a haste que estamos usando, veja item (iii) na pág. 39. Observa-se ainda
que a Tab. 1.1 seria diferente se usássemos outra haste para essa mesma caixa de pesos.
“ADT-MF” — 2005/11/7 — 8:51 — page 51 — #51
51
1.11. Interpolação e extrapolação
y6
d
8
7
6
r
¡
¡
5
¡
r
¡
4
¡
¡
¡r
3
¡
¡r
2
1
0
¡
¡
¡
r¡
¡
1
¡
2
3
4
5
6
7
8
p
x
Figura 1.5: Gráfico da lei associada à Tab. 1.1.
em que k e `0 são constantes, k por uma propriedade da haste e `0 dependendo
da posição em que a régua é fixada. A função ` = kp+`0 , com k e `0 constantes,
é uma função de p, o seu gráfico também será uma reta, paralela à primeira,
mas passando pelo ponto de ordenada ` = `0 e abscissa p = 0, veja Fig. 1.6, e se
denomina função afim.
1.11
Interpolação e extrapolação
1.11.1
Interpolação
Na experiência realizada obtivemos seis (6) pontos, considerando a origem
do sistema de coordenadas, e por eles fizemos passar um segmento de reta e
dissemos que a equação da reta (suporte do segmento) era a função d = f (p)
“ADT-MF” — 2005/11/7 — 8:51 — page 52 — #52
52
Capítulo 1. Método Científico
y
6
©©
` = k p + `0 ©©©
©
©
©
©©
©
`0 r©
©©
©
© d=kp
©
©©
©
©©
©©
x
-
Figura 1.6: Gráfico de uma função linear e de uma função afim.
procurada. É claro que a rigor deveríamos tomar valores intermediários até que
a sucessão de pontos gerasse o gráfico da função procurada. Tal fato é porém
impossível, visto que o próprio erro nas medições 24 impediria essa continuidade. Supusemos que os valores intermediários seriam bem representados pelos pontos da reta, isto é, que tais valores estariam sobre a reta. Essa maneira
de resolver o problema se denomina interpolação, e tomar os valores intermediários sobre a reta como os possíveis (mais prováveis) valores experimentais
se designa interpolar os resultados experimentais com a reta. Em todo o intervalo [0, pn ], os valores contínuos de 0 a pn , para a função d, excetuando-se
os seis (6) valores experimentais, foram obtidos por interpolação dos resultados experimentais. Tal procedimento é lícito, porque, se erramos na leitura do
deslocamento da ponta até 0,1 mm, a curva estará dentro do erro experimental.
1.11.2
Extrapolação
Outro procedimento, em oposição à interpolação, seria prolongar-se a reta, ou
melhor, o segmento de reta além do valor correspondente ao extremo pn do
intervalo, o que se denomina extrapolação. A extrapolação sendo a obtenção
de valores que estão fora do intervalo de definição da função levantada experimentalmente (intervalo definido pela experiência), que exprime a lei de
24
u A noção intuitiva de continuidade significa que podemos nos aproximar tanto quanto
quisermos do valor de uma função contínua, desde que, tomemos um valor suficientemente
próximo da variável independente. Mas, por causa da precisão de uma medida, não saberemos
dizer qual a real proximidade a que estamos. Assim, como verificar a condição de continuidade?
Note-se que nem estamos questionando os erros nas marcações na régua.
“ADT-MF” — 2005/11/7 — 8:51 — page 53 — #53
1.11. Interpolação e extrapolação
interdependência.
A extrapolação pode conduzir a erros e desastres, pois fora do intervalo
de definição da função, a correspondência entre as duas variáveis pode ser
totalmente diversa. Assim, por exemplo, para um peso 10 (dez) vezes maior
que pn , a haste se deforma permanentemente, não voltando a ponta da haste
para a posição de deflexão nula quando o peso é retirado; a 10 pn não vai
corresponder 10 dn , mas a um valor muito maior. A interdependência linear só
é válida dentro dos limites de elasticidade.
Observação avançada
Para mostrar que o problema é muito mais complexo do que parece de início,
vamos dar-lhe a solução geral para o estudante se precaver contra conclusões
apressadas. 25
Lembramos que se verifica facilmente, para uma dada haste, que a deflexão para um dado peso vai depender da distância x do ponto de sustentação do
peso ao ponto de fixação da haste. Por outro lado, experimentando com diferentes hastes verificamos que a deflexão depende da forma da secção reta da
haste, e que hastes de mesma secção reta e para o mesmo valor de x a deflexão
vai depender do material da haste. Uma haste de ferro e outra de latão, idênticas em comprimento e mesma secção reta, darão deflexões diferentes para os
mesmos pesos colocados à mesma distância x. Concluímos assim que a deflexão será função do peso p, da distância x, da área S da secção reta da haste e
do seu material M. Sendo uma função de quatro (4) variáveis. No estudo feito
anteriormente mantivemos três (3) variáveis com valores constantes, apenas o
peso aplicado variava. No decorrer deste curso vamos mostrar como se chega
teoricamente à forma da função f a partir dos conhecimentos adquiridos. Aqui
apenas para o estudante apreciar a complexidade do problema, damos a expressão da função d = f (p):
x3
d=
p,
(1.4)
3EI
expressão que se aplica quando não levamos em conta o peso da haste.
Na fórmula (1.4):
x – é a distância entre a fixação da haste e o ponto de suspensão do peso p ;
E – é o módulo de elasticidade ou módulo de Young, que é uma característica
do material que constitui a haste;
25
Veja §14.2, pág. 498.
53
“ADT-MF” — 2005/11/7 — 8:51 — page 54 — #54
54
Capítulo 1. Método Científico
I – é o momento de inércia da secção reta S da barra em relação ao eixo
horizontal que passa pelo baricentro da área e é ortogonal ao eixo da
haste.
Esta parte teórica é dada unicamente para mostrar ao estudante que ele
deve precaver-se contra a tendência de desprezar assuntos que aparentemente
são muito simples e que na verdade podem exigir conhecimento que fica muito
além da sua compreensão; serve apenas para esse fim, não devendo ser objeto
de estudo no atual estágio. Por outro lado, mostra também que a pesquisa teórica pode resolver problemas muito difíceis de abordar experimentalmente. Em
geral o homem caminha na investigação científica apoiado na pesquisa experimental e na pesquisa teórica, não podendo prescindir de nenhuma das duas
para o seu progresso.
Na pesquisa teórica o homem usa a matemática, i.e., métodos e processos
desenvolvidos em seus diferentes ramos, do mesmo modo que usa instrumentos científicos na investigação experimental. A Álgebra, o Cálculo Diferencial
e Integral, a Topologia, a Álgebra Linear, as Equações Diferenciais, a Análise
Tensorial, etc. são usados como são os Ciclotron, o Betatron, o Microscópio
Eletrônico, o Telescópio, o Acelerador de Partículas, o Calorímetro, etc. afim
de que o homem possa alcançar novas revelações da natureza. Na interação
com a natureza o homem investiga novos métodos e processos matemáticos
para trabalhar eficientemente na investigação teórica e assim nascem linhas de
pesquisa e novos métodos matemáticos, do mesmo modo que na iteração experimental com a natureza, o homem inventa e constrói instrumentos de medição
e novas máquinas mais eficientes e poderosas, como, por exemplo, os computadores, cujo uso se constitui em uma ferramenta indispensável, tanto para o
tratamento de dados experimentais quanto para tratamentos algébricos e numéricos. Mas para dominar essa ferramenta tão mutante, precisamos formar
base sólida nos conceitos básicos em física e em matemática, além de dominar
o uso de instrumentos de medidas mais simples, para que possamos melhor
dominar os equipamentos eletrônicos mais modernos e melhor interpretar seus
resultados.
Na Fig. 1.7 damos a deflexão de hastes de mesmo material e diferentes secções retas, junto a cada curva se desenhou a área da secção reta e o respectivo
eixo horizontal y ortogonal ao eixo da haste passando pelo baricentro, a fim
de que o estudante possa apreciar as variações das deflexões em função do
momento de inércia da seção reta em relação ao eixo y.
“ADT-MF” — 2005/11/7 — 8:51 — page 55 — #55
1.11. Interpolação e extrapolação
Figura 1.7: Deflexão de haste em função de momento de inércia da área da secção
reta. A curva III representa dois cilindros de mesmo momento de inércia (mesma deflexão)
mas a massa do oco é a metade do maciço.
55
“ADT-MF” — 2005/11/7 — 8:51 — page 56 — #56
56
Capítulo 1. Método Científico
Problemas
Se você não souber dizer, explicar e escrever as respostas das perguntas a seguir, volte ao livro e estude até saber responder, explicar e escrever as respostas
sem hesitação.
Problema 1.1. Se você entendeu realmente este capítulo, tente explicá-lo para
um leigo. Responda as perguntas:
– O que é observação?
– O que é um fato bruto?
– O que é um fato científico? Dê exemplos.
– Como você construiria uma caixa de pesos a partir de um padrão
previamente escolhido?
Problema 1.2. Você poderia descobrir a lei de interdependência existente entre duas grandezas físicas sem conhecer o porque dessa lei? Dê exemplos.
Problema 1.3. Como você estabeleceria a lei de interdependência entre essas
duas grandezas?
Problema 1.4. Como você interpreta um lei estabelecida experimentalmente?
Problema 1.5. Repita a experiência da deflexão de uma haste. Tome o peso
do Estojo de Física marcado com um 5 para unidade ou padrão, dê-lhe um
nome, por exemplo o seu nome. Você se chama José? Dê ao padrão o nome
de josé, e vamos indicá-lo pelo símbolo Jo. Defina esse padrão. Na física se
adota internacionalmente a seguinte norma: quando uma grandeza é indicada
por um símbolo originado de nome de pessoa, esse símbolo é escrito com a
inicial maiúscula, exemplo: N (newton, unidade de força proveniente de Isaac
Newton), W (watt, unidade de potência proveniente de James Watt), V (volt,
unidade de diferença de potencial elétrico proveniente de Alessandro Volta). A
(ampère, unidade de corrente elétrica proveniente de André-Marie Ampère),
etc., em caso contrário o símbolo se escreve com letra minúscula: dyn (dina,
unidade de força proveniente da palavra grega dyne que significa força); m
(metro, unidade de comprimento proveniente do grego metron, que significa
medida), etc.
Problema 1.6. Construa uma caixa de pesos a partir do Jo, e faça a curva de
interdependência da deflexão da haste em função do peso em sua extremidade
com essa caixa de pesos.
“ADT-MF” — 2005/11/7 — 8:51 — page 57 — #57
Problemas
Problema 1.7. Você pode fazer algo prático com o conhecimento adquirido
com o estudo da deflexão da haste? Explique.
Problema 1.8. Como fazer um dinamômetro? Explique.
Problema 1.9. A unidade Jo é igual ao peso de 5 gf, o 5 inscrito no peso do
estojo. Converta a curva de calibração obtida em Jo para gf.
Problema 1.10. Qual o valor do coeficiente de proporcionalidade k da lei de
interdependência entre peso e deflexão, quando se usa para unidade de peso o
Jo e para unidade de comprimento o mm ? E quando se usa para unidade de
peso o gf, e para unidade de comprimento o mm?
Definição do Jo
Observe-se que o Jo poderia ser definido do seguinte modo: “Um corpo tem
peso de 1 Jo quando colocado no ponto L na extremidade do dinamômetro A
provocar na haste uma deflexão de 1 mm”. O dinamômetro A sendo o dinamômetro construído dentro de especificações precisas. Desta definição resulta que
a lei de interdependência entre peso e deflexão será: d = k0 p = (1 mm/Jo) p. A
função inversa será: p = (1 Jo/mm) d. Isto significa simplesmente que, quando
se medem a deflexão em mm e o peso em Jo, a relação entre é simplesmente:
d = p. A leitura das divisões da régua fornece diretamente o peso (nominal) do
corpo em Jo. Um peso que deu a deflexão de 6,0 mm vale 6,0 Jo. Se quisermos
passar da unidade Jo para a unidade gf, basta saber a relação entre elas. No caso
considerado: 1,0 Jo = 5,0 gf, logo, se p = 6,0 Jo, então p = 6,0×(5,0 gf) = 30,0 gf.
Daí a vantagem de definir uma unidade de peso arbitrária como o Jo; determinações mais rápidas, a conversão sendo feita se necessária, no final. É uma
unidade prática, que tem o inconveniente de depender do nosso particular dinamômetro. Há porém outras unidades práticas, definidas de maneira geral e
que podem facilitar os cálculos. Exemplo: o elétron-volt, como unidade de
energia; a unidade unificada de massa atômica,26 como unidade de massa; o
Å (angström) como unidade de comprimento (1 Å = 10−10 m), etc. No §9.5
voltaremos a este ponto.
Um outro modo de correlacionar o peso com a deflexão é escrever nas divisões da escala, não os números correspondentes às unidades de comprimento,
mas diretamente os próprios valores correspondentes às unidades de peso. No
26
A unidade unificada de massa atômica é igual a fração 1/12 da massa de um átomo do
nuclídeo 12 C, em repouso e em seu estado fundamental. 1 u = 1,6605402×10−27 kg. No campo
da bioquímica a unidade unificada de massa atômica é também chamada de dálton, símbolo Da.
57
“ADT-MF” — 2005/11/7 — 8:51 — page 58 — #58
58
Capítulo 1. Método Científico
nosso exemplo, cada mm corresponde a 5 gf, 5 mm correspondem 25 gf, podese então, na escala graduada de mm em mm, gravar o zero no traço inicial e
25 ao lado do quinto traço (de mm) da escala, explicitando que a escala já está
graduada em gf.
Problema 1.11. Como fazer um dinamômetro de maior precisão? Você encontra na Natureza algo parecido? Explique.
Intertítulo dos revisores
u
Apresentou-se neste capítulo uma forma de se iniciar o estudo da Física a partir
de conceitos intuitivos e por meio de dispositivos rudimentares.
A principal preocupação foi encontrar uma maneira de indicar em aula expositiva ou em texto como se poderiam realizar experiências sem depender de
recursos outros além dos encontrados no ambiente onde vive o estudante (do
campesino ao urbano); exige-se por pré-qualificação apenas curiosidade científica e conceitos intuitivos de força (associado ainda ao de esforço muscular de
se sustentar corpos pesados) e de comprimento (medido por uma régua escolar,
ou mesmo confeccionada pelo próprio estudante).
Volta-se à experiência da deflexão de uma haste, orientando o estudante
para que ele próprio a execute.
Agora imagina-se que o estudante estará no seu laboratório e que realizará
suas próprias experiências, ainda com pouca orientação para o tratamento de
erros experimentais e para outros cuidados que deva tomar na montagem, nas
medidas e nas anotações. Pretende-se que o estudante perceba a necessidade
desse tratamento e desses cuidados.
Antes de realizar a experiência do dinamômetro de haste, se o estudante
quiser confeccionar sua própria caixa de pesos com sua própria unidade de
peso, poderá fazê-lo usando tiras de chumbo, ou mesmo pedaços de um cano
de chumbo (comprado em alguma loja de ferragens) ou ainda usando pedaços
de chumbadas de pesca; pode-se usar qualquer material sólido, diz-se para
usar chumbo como material para a caixa de pesos por motivo simples: é sólido
à temperatura ambiente, é fácil de trabalhar e moldar e, sendo muito denso,
precisa-se de pouco volume para acondicioná-los.
A confecção da caixa de pesos por meio da deflexão de uma haste, conforme já descrito neste capítulo, não leva a uma caixa de pesos de precisão
maior que a inerente à sensibilidade da medida da deformação da haste. Mas o
“ADT-MF” — 2005/11/7 — 8:51 — page 59 — #59
Problemas
estudante terá oportunidade de melhorar a precisão dos pesos de sua caixa conforme for obtendo equipamentos mais sensíveis – os dinamômetros de mola,
as balanças analíticas que construiremos com o estojo de mecânica –.
Nas experiências apresentadas usa-se uma caixa de pesos tendo por unidade a força peso local de uma massa de 1 g, que será chamada um grama-força
e denotada por 1 gf, que vale 9,80665×10−3 newtons (1gf = 9,80665×10−3 N)
em unidades SI. A vantagem em usarmos, no presente caso, um padrão adotado nacional e internacionalmente para medir pesos está na possibilidade de
comparação direta dos resultados numéricos das medições. O uso da unidade
Jo está restrito a seu usuário, a sua utilização por outros indivíduos só seria
possível se tivéssemos como compará-la com a unidade usada por outro. Há
duas maneiras de se proceder a essa comparação: (a) diretamente entre os padrões usados ou (b) indiretamente se referindo a um terceiro padrão.
59
“ADT-MF” — 2005/11/7 — 8:51 — page 60 — #60
60
“ADT-MF” — 2005/11/7 — 8:51 — page 61 — #61
Parte I
Estática
61
“ADT-MF” — 2005/11/7 — 8:51 — page 62 — #62
“ADT-MF” — 2005/11/7 — 8:51 — page 63 — #63
Capítulo 2
Regra do Paralelogramo
Introdução 1
Desenvolve-se neste capítulo um projeto para a verificação experimental da
lei algébrica de composição e de decomposição de forças não-paralelas, cujo
bom entendimento é fundamental para toda a Física. É claro que o desenvolvimento tem cunho educacional, afinal esse resultado é conhecido há muito; não
estaremos “reinventando a roda”; estaremos mostrando como “poderia ter sido
inventada”, tampouco estaremos historiando essa “invenção”.
Como estamos apresentando esse assunto para estudantes que se iniciam
em Física, estaremos usando conceitos intuitivos como ponto de partida. O
conceito de força não será inicialmente definido ou caracterizado formalmente,
porém todos possuímos o conceito intuitivo e sensorial por meio do esforço
muscular para sustentar corpos pesados, isto é, o conceito intuitivo de força;
usaremos pois as noções intuitivas de peso e de esforço muscular como o conceito intuitivo de força. Com isso em mente, se aplicarmos um dado esforço
muscular para empurrar um corpo que estiver imóvel, constataremos que esse
corpo não permanecerá imóvel. Se esse corpo estiver parado sobre um plano
horizontal, constataremos que ele passará a se movimentar sobre uma linha
reta do plano horizontal, justamente a reta que tem a direção da força aplicada;
se mudarmos a direção com que o empurramos, constataremos que a direção
da reta que “suporta” onde ocorre o movimento do corpo também mudará e, se
o esforço for uniforme, mantendo a direção, essa reta suporte terá a direção na
qual se exerce o esforço. . . Será possível substituir dois esforços por um único
1
u Este capítulo contém basicamente o Fascículo 1. Fizemos contar esta Introdução para
esclarecer o objetivo do autor e como ponte entre os Caps. 1 e 2.
63
“ADT-MF” — 2005/11/7 — 8:51 — page 64 — #64
64
Capítulo 2. Regra do paralelogramo
que tenha o mesmo efeito? Será possível “aniquilar” o efeito de dois esforços
por meio de um esforço único?
Por meio de outros fatos que envolvem conceitos mais simples podemos
constatar que isso é possível. Sabemos que é possível sustentar um peso por
um fio disposto verticalmente e, até já sabemos como avaliar o esforço necessário para sustentá-lo por esse fio, sabemos e já verificamos experimentalmente; sabemos também, do dia-a-dia, que podemos sustentar esse mesmo
peso amarrando-o em um fio não-vertical, neste caso, no entanto, precisaremos de mais um fio. 2 Podemos manter um corpo imóvel sustentado por um fio
vertical ou por dois fios não-verticais. Há alguma diferença efetiva entre essas
duas situações? Como caracterizá-las? Como relacioná-las?
Essa constatação do dia-a-dia indica que os esforços nos fios que sustentam o corpo mudam com as direções dos fios, ou seja, dependem das direções
desses fios. De alguma forma, já sabemos medir esses esforços usando a deflexão da haste, mas não sabemos medir pesos sustentados por meio de fios
não-verticais; como fazê-lo? Além disso, como associar as direções dos fios,
no primeiro caso com os do segundo caso? Podemos considerar que a direção do fio é também a “direção do esforço”? Precisamos verificar se isto é
factível nas condições dos ensaios que estaremos realizando, uma vez que sabemos que para fios longos não-verticais não se observam fios retilíneos. . . os
fios formam uma “barriga” (veja a forma de fios presos a dois postes). Dessa
forma, podemos aplicar forças em extremos do fio e comparar “os esforços”
em cada extremo. Mas antes de verificarmos isso, precisamos verificar se esforços aplicados no mesmo ponto do fio (em equilíbrio) dão a mesma medida.
Mas, ainda, precisamos verificar se sabemos medir esforços que não sejam
verticais apenas.
O que se apreende do exposto nesta introdução, é que precisaremos realizar experiências intermediárias para cumprir o projeto inicial para a verificação experimental da lei algébrica de composição de forças. A estratégia deste
capítulo será:
1. usar o dinamômetro de deflexão da haste para desenvolver técnicas de
medição e tratamento dessas medidas, independente da força peso;
2. aperfeiçoar esse dinamômetro para criar outro mais preciso e que possa
2
u Realmente, usando-se um único fio não-alinhado com a vertical prendendo o corpo,
não se consegue manter o corpo parado, imóvel; ele balançará em torno da vertical que passa
pelo ponto onde uma das extremidades do fio está presa. Ora, a presença do segundo fio (pelo
menos, podemos usar mais de um fio) significa a aplicação simultânea de outras forças. Vê-se,
pois, a necessidade e a conveniência de compor forças.
“ADT-MF” — 2005/11/7 — 8:51 — page 65 — #65
2.1. Deflexão de uma haste metálica
medir força não-vertical;
3. verificar se as medições para forças não-verticais são confiáveis e avaliar
o erro experimental nessas medidas;
4. verificar se os fios usados podem ser considerados como ideais e, daí,
capacitar-se a medir direção de força;
5. verificar, finalmente, a lei de composição de forças não-paralelas.
Note-se que um objetivo tido por alguns como tão modesto, aparentemente
tão simples, não pode ser alcançado sem que se cumpram etapas preliminares
intermediárias. Este é o segundo projeto científico apresentado neste livro, o
primeiro foi construir um dinamômetro, ainda que rudimentar; dispositivo que
vamos aperfeiçoar.
Observação No Cap. 1 abordamos o projeto para construção de um dinamômetro, considerando que dispúnhamos dispositivos e padrões, tanto de comprimento quanto de intensidade de força; em ponto de se usar como unidade
de peso padrão um corpo que ocasionasse uma deflexão correspondente a uma
unidade de comprimento. Esse procedimento foi muito bem pensado, uma vez
que quem o propôs dominava todo o processo de medição e de tratamento de
dados, estando em condição de estabelecer um procedimento que geraria uma
lei que relacionasse proporcionalmente uma unidade de intensidade de força a
uma unidade de comprimento. Essa estratégia é ótima quando não se têm valores de referência e se quer manter controle para o tratamento de dados com
pouca base; porém, é perigosa quando o estudante que apressada e inadvertidamente pensa que uma unidade de uma grandeza está sempre associada a
uma unidade da outra. Para que não se fique com essa falácia e para que se desenvolva habilidade para lidar com dispositivos experimentais, além de tratar
dados experimentais, no que se segue será abordado novamente o experimento
para a obtenção de um dinamômetro pela deflexão de uma haste para uma
caixa de pesos aferida em grama-força, dando oportunidade para um primeiro
contato com o tratamento de erros, algarismos significativos, etc.
2.1
Deflexão de uma haste metálica
Construímos uma caixa de pesos, tomando o peso de 5 gf do estojo como padrão primário e uma tira de chumbo de onde um peso que provoque uma deflexão um pouco maior que a do padrão primário, lixando-o até que dê a mesma
65
“ADT-MF” — 2005/11/7 — 8:51 — page 66 — #66
66
Capítulo 2. Regra do paralelogramo
deflexão, depois se repete o procedimento para dois padrões secundários de
10 gf. Ficamos assim com a seguinte caixa de pesos 2 × 5,0 gf e 2 × 10,0 gf.
Com os pesos da caixa de pesos obtidos da maneira indicada 3 pode-se
fazer o estudo da lei de interdependência entre o peso e a deflexão que ele produz. Fazemos uma tabela de valores dos pesos e das correspondentes deflexões
(Tab. 2.1). Com esses valores constrói-se o gráfico da Fig. 2.1.
Tabela 2.1: Interdependência entre peso (gf) e deflexão (mm).
Peso – p
(gf)
0
5,0
10,0
15,0
20,0
25,0
30,0
Deflexão – d
(mm)
0,0
1,0
2,1
2,9
4,1
5,0
6,1
Vê-se que a lei de interdependência entre o peso e a deflexão pode ser descrita pelo segmento de reta que passa próximo aos pontos obtidos com os valores experimentais, observe-se que alguns pontos ficam acima e outros abaixo
da reta. Pode-se atribuir aos erros experimentais essa discrepância; para levar
em conta tais erros, deve-se avaliar o erro máximo que se pode esperar, ou se
espera obter com as medições efetuadas.
. Será muito difícil avaliar deflexões de um (1) décimo de milímetro (mm)
para mais ou para menos, será pois provável que cometamos erros de um
décimo de mm nas medições das deflexões, fazendo uso de uma régua
milimetrada.
. Quanto aos pesos, tratando-se de padrões obtidos pelo processo indicado, 4 devem ter também uma imprecisão equivalente a um décimo da
unidade usada, i.e., um décimo do peso padrão primário de 5 gf.
3
u O estudante pode realizar esse experimento confeccionando sua caixa de pesos ou
usando a do estojo de mecânica, formado por pesos aferidos com valores nominais expressos
em grama-força e composto por: um (1) peso de 1,0 gf, dois (2) pesos de 2,0 gf, um (1) peso de
5,0 gf, dois (2) pesos de 10,0 gf e um (1) peso de 20,0 gf, indicando que foram calibrados com
precisão de décimo de grama-força, ao menos.
4
u Está-se considerando o processo de confecção do padrão de peso igual a 5 gf, ou seja,
que se confeccionou a caixa de pesos usados: 2 pesos de 5 gf, 1 de 10 gf, 1 de 20 gf, por meio
“ADT-MF” — 2005/11/7 — 8:51 — page 67 — #67
67
2.1. Deflexão de uma haste metálica
d
(mm) 6
7
r
6
r
5
r
4
r
3
r
2
r
1
0
q
10
20
30
40
p-
(gf)
Figura 2.1: Gráfico da lei associada à Tab. 2.1; os pontos no gráfico indicam as medidas anotadas.
Isso significa que todas as medidas das deflexões podem ter um erro de
±0,1 mm e as dos pesos de ±0,5 gf. Neste caso, o gráfico construído com os
valores experimentais conterá retângulos em lugar de pontos, veja o gráfico
da Fig. 2.2. Observe-se que o segmento de reta toca todos os retângulos que
representam os pontos medidos experimentalmente de coordenadas p e d, mais
ou menos os respectivos erros.
Diz-se neste caso que a lei de interdependência entre peso e deflexão da
da deflexão da haste, ou, alternativamente: 2 pesos de 5 gf, 2 de 10 gf. Se usássemos os termos
do Cap. 1, diríamos que se adotou 1 Jo = 20 gf.
Nota No gráfico da Fig. 2.1 se usou o símbolo q para marcar o ponto medido; e no gráfico
da Fig. 2.2 o símbolo para demarcar a área do gráfico onde deve estar o ponto da lei associado
ao primeiro processo e o símbolo para a do segundo processo, ambos para medidas feitas
usando-se régua milimetrada.
“ADT-MF” — 2005/11/7 — 8:51 — page 68 — #68
68
Capítulo 2. Regra do paralelogramo
d
(mm) 6
6
5
4
3
2
1
0
q
10
20
p30 (gf)
Figura 2.2: Gráfico da lei associada à Tab. 2.1; os pontos no gráfico indicam as medidas anotadas, os retângulos o erro experimental levado em conta, o pontilhado corresponde ao erro de ±0,1 gf e o contínuo ao de ao erro de ±0,5 gf. (em papel milimetrado)
haste é da forma d = kp, sendo k uma constante física característica da haste
utilizada, isto é, a deflexão é função linear do peso, ou ainda, a deflexão é
proporcional ao peso dentro do erro experimental. Temos então uma lei física:
“A deflexão de uma haste produzida por pesos em sua extremidade
é proporcional ao peso dentro do erro experimental e desde que o
peso não atinja um valor máximo chamado limite de elasticidade.”
De fato, os valores experimentais correspondem aos valores de p entre 0
(zero) e um máximo pM igual a 30 gf. Entre esses valores de p, que variam
no intervalo de 0 a pM , ou p ∈ [0, pM ], a deflexão é proporcional ao peso e se
escreve:
d = k p , p ∈ [0, pM ] ,
isto é, a deflexão é proporcional ao peso desde que o peso varie no intervalo
[0, pM ], em que se verifica características elásticas.
Para se obter o valor de k basta ver que k = d/p, e, tomando os valores
da Tab. 2.1, se obtém k = 2,0 mm/gf; valor que também pode ser obtido pelo
gráfico correspondente.
“ADT-MF” — 2005/11/7 — 8:51 — page 69 — #69
2.1. Deflexão de uma haste metálica
2.1.1
Interpolação e dinamômetro
Ficou implícito na lei expressa anteriormente que qualquer valor do peso daria
uma deflexão cujo valor definiria um ponto sobre a reta. Vice-versa, um peso
desconhecido p x ao ser pendurado na haste, no ponto previamente determinado
na extremidade livre da haste, dará uma deflexão d x e o par (p x , d x ) deverá ser
um ponto da reta.
Por exemplo, se p x deu uma deflexão d x = 4,5 mm, determina-se no gráfico
o pondo P x da reta e, finalmente, o valor p x = 22,5 gf. Poderíamos ter usado a
equação da reta d = kp, sendo k = 0,2 mm/gf, ou seja, usando p = 1k d, donde,
para efeito de cálculo, se tem:
p = (5,0 gf mm−1 ) d = (5,0 gf mm−1 ) (4,5 mm) = 22,5 gf .
Ora, o valor 22,5 gf não é um valor experimental obtido por medição direta por
meio de instrumento de medição calibrado convenientemente, mas um resultado tirado por meio do gráfico da Fig. 2.1 ou da equação
p = (5,0 gf/mm) d ,
diz-se nesse caso que se fez uma interpolação dos resultados experimentais.
A interpolação é lícita, o valor achado está contido no intervalo determinado
experimentalmente.
Segue-se ainda que a haste ou ponteiro, tendo suas deflexões relacionadas
com os pesos que as provocam, podem fornecer um meio ou processo de determinar o peso dos corpos, desde que esses pesos estejam contidos no intervalo
[0, pM ]. O ponteiro e sua “curva” de calibração dada pelo gráfico da Fig. 2.1
ou pela expressão d = 0,2 mm/gf p constituem um “aparelho para medir o
peso dos corpos ou as forças”, ou, sucintamente, constituem um dinamômetro (do grego: dynamis, força; e metron, medida). É claro que, para termos um
dinamômetro, convém determinar, não a função d = k p, mas a sua função in
versa p = ( 1k )d = 5 gf/mm d, função que possibilita cálculo imediato: dada a
deflexão produzida por um peso p qualquer, medida em mm, para obtermos o
peso correspondente em gf basta multiplicar a deflexão por 5.
Exemplo Um peso que deu uma deflexão de 3,0 mm será de
(5 gf/mm) × 3 mm = 15 gf.
Faça o gráfico dessa função p = f (d).
69
“ADT-MF” — 2005/11/7 — 8:51 — page 70 — #70
70
Capítulo 2. Regra do paralelogramo
Observação A lei d = kp, p ∈ [0, pM ], é uma lei baseada em fatos experimentais. Trata-se de um postulado, isto é, de uma proposição suposta verdadeira
sem demonstração, apenas se verifica experimentalmente que alguns valores
do peso e da deflexão (ao todo sete pares de valores, incluindo a origem, no
nosso caso) satisfazem essa lei e, mesmo assim, dentro do erro experimental. A
experimentação teve o mérito de levar-nos ao postulado do qual não tínhamos
a menor idéia.
Observe-se que a expressão matemática da lei mostra que ela deve ser válida para uma infinidade de pares de valores, o que não foi verificado. Seria necessário fazer muitas e repetidas experiências, com vários observadores, muito
bem planejadas e controladas, para que essa lei, tirada da prática, tivesse aceitação (científica) incontestável; mesmo assim, dever-se-ia dizer sempre que
ela seria válida dentro do erro experimental. De fato, com métodos de medição
mais refinados, dando erros muito menores, poder-se-ia encontrar uma lei diferente. A investigação teórica partindo de fatos ou leis já muito bem aceitos
ou “incontestáveis” e que demonstrasse matematicamente que, nas condições
da experiência, a deflexão da haste homogênea é uma função linear do peso,
seria uma importante contribuição ao estudo experimental.
A investigação teórica que o homem realiza a partir de conhecimentos preestabelecidos é um importante processo para o progresso científico. Neste tipo
de investigação o homem utiliza papel, lápis, computadores, livros e revistas
especializadas; é tão difícil quanto a investigação experimental, mas está intimamente entrelaçada com ela. Por outro lado, é a própria investigação teórica
que muitas vezes sugere novas experiências, ou solicita novos dados, ou indica novos rumos para a pesquisa experimental. Sem a pesquisa experimental
o homem perde o contato com a natureza e tende a vagar sem rumo, levado
pela imaginação; mas, sem a investigação teórica o homem não tem a visão do
conjunto e não vislumbra novos caminhos para a sua pesquisa experimental. A
pesquisa teórica e a experimental se complementam, completam-se.
Não poderá haver independência intelectual de um grupo de pesquisadores
se a pesquisa teórica não é complementada pela pesquisa experimental e viceversa.
2.1.2
Extrapolação
Suponhamos que se tenha um peso de 50 gf, qual a deflexão que ele produzirá
quando pendurado na haste? Ora, d = f (p), logo 5
5
u Note-se que se está considerando que o corpo é preso à haste na mesma posição em
que se colocaram os pesos da caixa de pesos e seguindo os mesmos procedimentos para as
“ADT-MF” — 2005/11/7 — 8:51 — page 71 — #71
2.2. Grandezas homogêneas
d = 0,2 mm/gf × 50 gf = 10 mm .
Se, porém, colocarmos o peso de 50 gf pendurado na haste, veremos que ele
dará uma deflexão muito maior e que, além disso, a haste não voltará mais
para a posição anteriormente associada à do peso nulo (haste não sustentando
carga), houve deformação permanente da haste. Observe-se que o valor de
50 gf não se acha no intervalo [0, pM ], ele está fora do intervalo dos pesos associados aos ensaios experimentais com essa haste. Diz-se, nesse caso, que se fez
uma extrapolação dos resultados experimentais. A extrapolação nem sempre
é válida, podendo resultar em resultados completamente errôneos, ou mesmo
em resultados desastrosos. Se porém tivéssemos experimentado com o peso
de 40 gf, antes de experimentar com 50 gf, teríamos ainda um valor dado pela
lei de proporcionalidade (conforme constatamos), a extrapolação revelando-se
ainda válida, porque esse valor estaria dentro do limite de elasticidade da haste.
De qualquer modo, nunca se deve extrapolar resultados.
2.2
Grandezas homogêneas
As grandezas homogêneas são entes de mesma espécie ou entes homogêneos
que constituem um conjunto no qual se pode estabelecer uma relação de igualdade e de adição ou composição, associando-se com essa operação dois deles
para obter um terceiro, pode-se ainda definir a associatividade dessa operação
e multiplicação por um número (real).
2.3
Grandezas físicas
Medir uma grandeza homogênea é exprimir por um número a relação entre ela
e uma outra da mesma espécie, tomada como unidade. O conjunto de operações para medir uma grandeza física se denomina medição e o resultado da
medição é a medida da grandeza. Todas as grandezas que se podem medir se
denominam grandezas físicas. Uma grandeza física fica caracterizada quando
se estabelecem processos (procedimentos) de medição e se tem instrumental
para medir a grandeza a partir de outras com as quais se relaciona, seja por
definição, seja por leis físicas, como veremos.
medições que levaram à Tab. 2.1, da qual se tirou a expressão d = f (p) = 0,2 mm/gf p.
71
“ADT-MF” — 2005/11/7 — 8:51 — page 72 — #72
72
Capítulo 2. Regra do paralelogramo
2.4
Erros
Na medição de uma grandeza podem ser cometidos erros que dependem dos
aparelhos e instrumentos de medição e do experimentador ou observador.
Distinguem-se duas classes principais de erros, os sistemáticos e os acidentais. Vejamos.
2.4.1
Erros sistemáticos
Os erros sistemáticos são ocasionados, por uma falha no sistema de medição, por um problema qualquer do próprio observador (erros pessoais). Usando
nosso exemplo, suponhamos que o peso de 5 gf dá a deflexão de 1 mm quando
se coloca o peso a 3,0 mm da extremidade livre da haste; faz-se a curva de interdependência entre as deflexões da haste e os pesos pendurados nessa posição,
obtendo-se então a curva de calibração d = (0,2 mm/gf) p ; posteriormente,
faz-se na ponta da haste um traço para estabelecer a posição em que se devem
pendurar os pesos; no entanto, em vez de fazer o traço a 3,0 mm de distância
da ponta da haste, faz-se a marca a 10 mm; como é óbvio, os pesos que vão
produzir deflexões de 1 mm não serão mais de 5 gf e, sim, sempre maiores.
As medidas dos pesos por esse dinamômetro serão afetadas de um erro sistemático, dando sempre valores menores. Os erros sistemáticos influenciam as
medidas sempre do mesmo modo, majorando, diminuindo seus valores. Para
evitá-los, deve-se examinar e calibrar todos os instrumentos, confrontando as
escalas com os padrões e examinando possíveis influências devidas à temperatura, pressão, etc.
Os erros pessoais podem ser devidos, por exemplo, a uma deficiência visual do observador, ou a um tempo maior de sua reação ao medir o tempo.
Os erros sistemáticos podem ser afastados ou levados em conta na medição da
grandeza, corrigindo-os nas medidas.
2.4.2
Erros acidentais
Os erros acidentais são erros fortuitos ou devido ao acaso (aleatórios). São
devidos a causas variáveis, indetermináveis, estão dentro do limite de precisão
dos instrumentos e podem ocorrer, dando medidas maiores, medidas menores
que a grandeza, isto é, podem ser positivos ou negativos. Os erros acidentais
podem ser tratados matematicamente e seu estudo é muito importante para a
Física. O estudo dos erros acidentais será feito mais adiante (§2.5).
“ADT-MF” — 2005/11/7 — 8:51 — page 73 — #73
73
2.4. Erros
2.4.3
Erros grosseiros
Há um terceiro tipo de erro que freqüentemente não é mencionado: são enganos ou erros grosseiros. Esses erros são cometidos por um observador inexperiente ou por um “observador experiente muito distraído”. Por exemplo, na
régua, o observador que a lê, no sentido contrário, em vez de 6 lê 9, ou em vez
de 3 lê 8, confunde 5,4 cm com 5,4 mm, etc.
Figura 2.3: Ilustração para o erro de paralaxe.
O erro grosseiro mais comum é o erro de paralaxe que advém da não
observância da linha de visada correta para a leitura na escala do aparelho
(analógico). Usaremos as medidas para a construção do dinamômetro de haste
para exemplificar o erro de paralaxe. Em uma das ilustrações da Fig. 2.3, a linha de visada faz coincidir a ponto A da haste com um traço acima ou abaixo,
conforme vista pelo observador O1 ou O2 , daquele obtido pela visada na direção ortogonal O à face graduada da régua. As duas leituras vão diferir, dando
um erro grosseiro eg . Para evitar esse tipo de erro (muito comum entre principiantes) deve-se observar sempre a linha de visada ortogonal à face da régua
até encontrar a posição do ponto a ser medido, a ponta da haste devendo estar
o mais próximo possível da régua, para minimizar possível erro de paralaxe,
veja a outra ilustração da Fig. 2.3, na qual o ponto A está bem próximo à face
da régua, sem a tocar. Para evitar ou minimizar o erro de paralaxe, os instrumentos de precisão têm um espelho sob o ponteiro ou agulha, de modo que
o observador ao olhar o traço não deve ver a imagem do ponteiro no espelho,
coberta pelo próprio ponteiro, assim fica melhor garantida a ortogonalidade e
a minimização do erro de paralaxe. 6
6
u
Algumas observações sobre o que não-raramente se observa com estudantes no labo-
“ADT-MF” — 2005/11/7 — 8:51 — page 74 — #74
74
Capítulo 2. Regra do paralelogramo
2.5
Estudo dos erros acidentais
Ao estudarmos a deflexão da haste avaliamos a deflexão mínima observável
como sendo igual a 0,1 mm, que considera o erro a se admitir devido à imprecisão do instrumento (tanto quanto a imprecisão da sua construção, quanto
a acuidade para leitura). Tal erro foi denominado de erro experimental, ocorrendo tanto para mais quanto para menos.
Vejamos como proceder para obtermos uma precisão maior do que o erro
experimental permitiria numa única medição 7 . Ao tirar e colocar o peso 10 gf,
por exemplo, na haste, suponhamos que um observador leia 2,1 mm na primeira vez, em seguida retira o peso, a ponto volta para a indicação 0,0 mm.
Colocando novamente o peso, a ponta se desloca para a posição lida como
2,0 mm; retirado o peso novamente a ponto volta ao 0,0 mm. Na terceira vez
com o peso de 10 gf pendurado, ele lê 1,9 mm, e assim por diante, obtendo as
leituras (em mm):
d1 = 2,1 mm; d2 = 1,9 mm; d3 = 2,1 mm; d4 = 2,2 mm; d5 = 1,9 mm;
d6 = 2,0 mm; d7 = 2,0 mm; d8 = 1,9 mm; d9 = 2,0 mm; d10 = 1,9 mm.
ratório:
1. Alguns estudantes cuidadosos julgam que devem manter sempre a mesma posição corporal na ocasião das medições, chegam a marcar na bancada a posição dos cotovelos
e apóiam o queixo em mãos cruzadas, olhando, antes de medir, se os cotovelos estão
nas marcas. Esses procedimento não corrige a linha de visada quando a extremidade do
ponteiro se desloca, e ele sempre se desloca quando se muda o peso sustentado, portanto
esse não é um procedimento correto, por mas cuidadoso que pareça ser.
2. A forma de abordar o instrumento onde se lêem as medições em escalas analógicas,
buscando sempre uma linha de visada que seja perpendicular à escala que passa pelo
ponto a ser medido, não está restrito às experiências com dinamômetro de haste (ou de
mola), tampouco às medições em réguas para medir comprimentos. Aplica-se sempre
para medições em escalas analógicas.
3. A eficácia do espelho sob a escala depende do fato do espelho estar em plano paralelo ao
do da escala, dessa forma, quando se usa uma superfície refletora não-plana por trás da
régua, ocorre-se sempre em erros grosseiros mascarados por um guia falseado (no caso
da placa retangular de aço que se encontra no estojo de mecânica, não se deve usá-la
como superfície refletora para minimizar o erro de paralaxe), quem estiver com dúvida
ou céptico com esta observação, que refaça as experiências em que se usam réguas,
dispondo dessa placa refletora, os erros serão muito maiores com ele; o estudante que
não estiver convencido, que verifique e justifique.
7
u Continuaremos usando a experiência da construção do dinamômetro por deflexão da
haste como exemplo e motivação; o estudante estará apto para testar todos os argumentos apresentados, e deverá fazê-lo.
“ADT-MF” — 2005/11/7 — 8:51 — page 75 — #75
75
2.5. Estudo dos erros acidentais
a ponta da haste voltando sempre par a posição de leitura 0,0 mm quando o
peso é retirado.
Qual desses números será o valor exato da grandeza deflexão correspondente ao peso de 10 gf?
Na Física é raro conhecermos o valor exato ou absoluto da grandeza. Mas
em alguns casos há meios que garantem o valor exato, por exemplo: no plano
euclidiano a soma S dos ângulos internos de um triângulo é igual a 180◦ ; e a
soma dos ângulos sucessivos entre três semi-retas que divergem de um mesmo
ponto é igual a 360◦ ; ora, ao medir os ângulos internos de um triângulo pode-se achar para sua soma primeiro o valor 179◦ e, numa segunda vez, 181◦ .
Denomina-se erro absoluto da medida e a diferença entre o valor da medida
e a grandeza: e1 = 179◦ − 180◦ = −1◦ e o erro absoluto da segunda medida
e2 = 181◦ −180◦ = +1◦ . Se tirarmos a média aritmética dos dois valores:
179◦ + 181◦
= 180◦ ,
2
achamos o valor S considerada.
No caso da deflexão da haste, porém, não conhecemos previamente seu
valor absoluto. Costuma-se, em tais casos, afirmar que o valor que deve aproximar-se o mais possível do valor absoluto da grandeza é a média aritmética
das medidas achadas. Tal afirmação só é válida quando todas as medidas merecem a “mesma confiança”, isto é, quando forem feitas pelo mesmo observador, com o mesmo cuidado, a mesma atenção de tal modo que o observador
não atribua a nenhuma delas precisão maior que às outras. Trata-se de um
postulado, pois não há como provar que a média aritmética dê o que mais se
aproxima do valor absoluto da grandeza. Faz parte do grupo de postulados de
Gauss para o estudo dos erros (incertezas) nas medidas das grandezas.
2.5.1
Dispersão, desvio ou resíduo
Suponhamos que d seja a média aritmética de n valores medidos di , i.e., 8
n
1 X
di ,
d=
n i=1
a diferença ri = di − d se denomina dispersão, desvio ou resíduo da medida i.
8
u
Note-se que i ∈ {1, 2 . . . n}.
“ADT-MF” — 2005/11/7 — 8:51 — page 76 — #76
76
Capítulo 2. Regra do paralelogramo
Tabela 2.2: As deflexões e os valores numéricos de seus desvios, na última linha se
P
dispõe a soma da respectiva coluna: 10
i=1 di = 20,0 , etc.
di
ri
|ri |
|ri |2
2,1
1,9
2,1
2,2
1,9
2,0
2,0
1,9
2,0
1,9
20,0
+0,1
−0,1
+0,1
+0,2
−0,1
0,0
0,0
−0,1
0,0
−0,1
0,0
0,1
0,1
0,1
0,2
0,1
0,0
0,0
0,1
0,0
0,1
0,8
0,01
0,01
0,01
0,04
0,01
0,00
0,00
0,01
0,00
0,01
0,10
É óbvio que a soma dos resíduos é nula, isto é, que
n
X
ri = 0 ,
pois
i=1
nd =
n
X
di .
i=1
Para fixar idéias, seja n = 10 e di correspondendo às leituras para a deflexão
da haste para o peso de 10 gf. Para resumir, dispomos os diferentes valores
de di no quadro da Tab. 2.2 que contém os valores de ri , |ri | e |ri |2 , bem como
as respectivas somas. A média dos valores absolutos dos desvios se denomina
desvio absoluto médio:
n
1X
|r| =
|ri | = 0,08 mm
para os valores do nosso exemplo.
n i=1
Entretanto, como se verá na parte teórica, a mais importante medida da dispersão das medidas é o chamado desvio-padrão (σ) ou erro médio quadrático
que se define como sendo tal que: 9
v
t n
n
X
1
1X 2
2
2
σ =
ri
⇒
σ=
r .
n i=1
n i=1 i
√
Para os valores do nosso exemplo, o desvio-padrão é: σ = 0,010 = 0,10 mm.
9
u
O parâmetro de dispersão: σ2 =
1
n
Pn
2
i=1 ri
é chamado variância.
“ADT-MF” — 2005/11/7 — 8:51 — page 77 — #77
77
2.5. Estudo dos erros acidentais
2.5.2
Erro médio da média
Já vimos o desvio médio absoluto, também chamado simplesmente de desvio
médio, e o erro médio quadrático, ou desvio-padrão.
O erro médio padrão da média ou erro médio da média ou ainda, conforme recomenda o VIM[2], desvio-padrão experimental da média será definido como
σ
s= √
;
n−1
√ , donde s = 0,03 mm, que é menor que o
no caso da deflexão estudada: s = 0,10
9
desvio médio absoluto |r| = 0,09 mm e que o desvio-padrão σ = 0,10 mm.
A grandeza deflexão para o peso de 10 gf deverá estar compreendida no
intervalo
d10 = (2,00 ± 0,03) mm, i.e., d10 ∈ (1,97 mm , 2,03 mm),
com nível de confiança de 68 %.
2.5.3
Erro relativo
O erro relativo é o erro dividido pela respectiva medida. O erro relativo médio
da média será portanto εr = s/d, no caso da deflexão da nossa para o peso
0,03
= 0,015 . Como o erro relativo é expresso por um numero
de 10 gf: r = 2,00
muito pequeno, muito importante para avaliação da precisão na medida é o
erro relativo percentual que se obtém multiplicando por 100 o erro relativo;
assim, o erro médio relativo percentual da média do nosso exemplo será 1,5 %.
2.5.4
Erro tolerável
Importante para a experimentação é o erro tolerável que é, por definição, igual
a três (3) vezes o erro médio quadrático, isto é, εtol = 3σ. Sua importância
para o estudo aqui desenvolvido é que toda medida cujo erro seja maior que
o erro tolerável deve ser rejeitada ou, pelo menos, deve-se repetir a medição
corretamente, pois será provável que tenha havido erro grosseiro na medição.
A teoria dos erros será estudada mais adiante, no devido tempo; por ora a intenção é que o estudante perceba a necessidade desse estudo e adquira vivência
com esses efeitos inexoráveis às medições.
“ADT-MF” — 2005/11/7 — 8:51 — page 78 — #78
78
Capítulo 2. Regra do paralelogramo
2.6
Algarismo significativo
Na medição da deflexão da haste vimos que o primeiro algarismo, o dos milímetros, era lido na régua milimetrada, o dos décimos de milímetro era avaliado, o dos centésimos de milímetro era impossível determinar praticamente
por meio da régua milimetrada. Pois bem, os algarismos de um número que exprimem a medida de uma grandeza até o primeiro algarismo avaliado, ou duvidoso, denominam-se significativos; os restantes não são significativos (para
a medição realizada por meio desse instrumento). A deflexão 2,9 mm contém dois (2) algarismos significativos, se tivéssemos escrito 2,92 mm, pretendendo que se tivesse avaliando os centésimos de milímetro, estaríamos exagerando nosso poder de avaliação ao usar essa régua milimetrada. Costuma-se
pôr um traço sobre o primeiro (1o ) algarismo avaliado, por exemplo 2,9̄2 mm,
despreza-se o segundo (2o ) algarismo avaliado: 2,9̄ mm. Sendo assim, não se
precisa escrever o traço sobre o primeiro algarismo avaliado, convencionando-se que o último algarismo significativo será sempre o primeiro algarismo
avaliado ou duvidoso. Deste modo, escreve-se 2,0 mm ou 3,0 mm para significar 2,0̄ mm e 3,0̄ mm, isto é, que o algarismo zero foi estimado 10 (avaliado).
Observe-se que os números poderiam ser inteiros, por exemplo, se mudássemos para a unidade de décimo de milímetro (10−1 mm), teríamos:
2,9̄ mm = 29̄0 × 10−1 mm;
se usássemos o milésimo de milímetro 11 teríamos:
2,9̄ mm = 29̄00×10−6 m = 29̄00 µm.
Se a unidade fosse o centímetro, ou o metro, teríamos respectivamente: 0,29̄ cm
e 0,0029̄ m. Em qualquer dos casos o número de algarismos significativos para
essa medição é sempre 2 (dois).
10
u Ou seja, que se considerou que para essas duas medições o ponto lido estava sobre um
traço de milímetro; note-se que, por essa convenção, quando se escreve 2 mm se está referindo a
uma medida realizada por uma régua que apresenta apenas traços de centímetro em centímetro.
11
u Para o Sistema Internacional de Unidades, o SI, o símbolo µ é usado como o prefixo
micro correspondendo ao fator 10−6 ; o uso do micron e seu símbolo (µ) como unidade de comprimento correspondente a milésimo de milímetro foi adotado pelo SI em 1879 e reiterada em
1948, mas foi abolida pela 13a Conferência Geral de Pesos e Medidas (CGPM) em 1968; dessa
forma, denota-se: 10−6 m = 1 µm.
“ADT-MF” — 2005/11/7 — 8:51 — page 79 — #79
79
2.6. Algarismo significativo
2.6.1
Operações com algarismos significativos
Para a Física Experimental é muito importante a noção de algarismos significativo, bem como as operações com os mesmos, pois os algarismos não significativos, ficando completamente encobertos pelo erro experimental, nada representam nas medidas das grandezas. É portanto inútil escrevê-los ou incluí-los
nos cálculos.
2.6.1.1
Normas para o cálculo com dados experimentais
1o ) A
Ao registrar o resultado de medições ou de cálculos conserva-se somente
um (1) algarismo duvidoso.
Exemplo:
3,29̄2 ≈ 3,29̄ .
2o ) A
Ao desprezar algarismos que não são significativos:
. acrescenta-se 1 ao último algarismo significativo retido se o imediatamente seguinte desprezado for maior que 5;
. nada se acrescenta se este for menor que 5;
. se o algarismo que antecede o duvidoso for igual a 5, acrescenta-se
1 ao primeiro algarismo duvidoso se ele for ímpar e nada se for par.
Exemplo:
314̄6 ≈ 315̄ ; 2,14̄4 ≈ 2,14̄ ; 8,155̄5 ≈ 8,156̄ ; 9,24̄5 ≈ 9,24̄ .
3o ) S ̧̃
Ao se efetuar uma soma ou uma subtração escrevem-se os números em
colunas, como de ordinário. Os algarismos significativos de cada número
serão desprezados se estiverem em colunas além da primeira que contenha algarismos duvidosos, aplicando-se o arredondamento; a menor
precisão em uma parcela contamina todas as outras parcelas.
Exemplo:
5,23̄ + 8,1̄ + 3,39̄ + 8,46̄ + 10,87̄ + 12,7̄ = 48,7̄5
5,2 + 8,1 + 3,4 + 8,5 + 10,9 + 12,7 = 48,8̄
3,86̄ + 2,3̄ = 1,5̄6
3,9 + 2,3̄ = 1,6̄
“ADT-MF” — 2005/11/7 — 8:51 — page 80 — #80
80
Capítulo 2. Regra do paralelogramo
4o ) M̧̃
Na multiplicação de dois números basta observar que o produto de um
algarismo duvidoso dá um resultado duvidoso e que no produto final de
dois números devemos ficar apenas com o primeiro algarismo duvidoso.
Exemplo: 12
8,31̄ × 2,1̄ ≈ 17,4̄ ; 2,38̄ × 2,2̄ ≈ 5,2̄ .
“Se p é o número de algarismos significativos do fator que tem menor
número de algarismos significativos, o produto terá p ou p+1 algarismos
significativos”.
5o ) D̃
Vale para a divisão observação análoga a da multiplicação.
Exemplo: 13
8,31̄ ÷ 2,1̄ ≈ 4,0̄ ;
25,35̄ ÷ 3,5̄ ≈ 7,9̄ .
Neste caso, o divisor tem um número de algarismos significativos menor
que o dividendo, o quociente tem o mesmo número que o divisor. Se,
porém, o número de algarismos significativos do dividendo e do divisor
forem o mesmo, o quociente terá no máximo o mesmo número e no
mínimo um a menos.
Se o divisor tem um número de algarismos maior que o do dividendo, o
quociente terá o menos número que o dividendo ou um a menos.
2.7
Dinamômetros
Da observação da deflexão de uma haste, obtivemos um processo para pesar
os corpos e construímos um dinamômetro. Os dinamômetros, que medem as
12
Efetuando as operações:
831̄
21̄
×
13
×
238̄
22̄
8̄3̄1̄
1662̄
4̄7̄6̄
476̄
174̄5̄1̄
52̄3̄6̄
Efetuando as operações:
8,31̄
6 3̄
2 0̄1̄
1 8̄9̄
1̄2̄0
2,1̄
3,9̄6̄ ≈ 4,0̄
25,35̄
3,2̄
22 4̄
2 9̄5̄
2 88̄
7,9̄2̄ ≈ 7,9̄
7̄0̄
“ADT-MF” — 2005/11/7 — 8:51 — page 81 — #81
81
2.7. Dinamômetros
intensidades de forças, podem ter formas e aspectos variados, muito diferentes
da haste do exemplo estudado. Na Fig. 2.4 damos diferentes tipos de dinamô-
Figura 2.4: Ilustrações de dinamômetros.
metros baseados na deformação de um corpo sob a ação de forças; entretanto
esses tipos de dinamômetros não são muito precisos, tendo em vista que a
deformação é muito pequena relativamente ao valor da intensidade da força.
Convém obter dinamômetros de maior precisão e sensibilidade para o estudo
das forças, portanto arranjar um processo para aumentar a deformação relativa
à intensidade da força. Isto se consegue enrolando um fio de aço em espiral;
quando a espiral se alonga, o fio se torce e se deflete: “podemos formar um
dinamômetro de precisão com um fio de aço formando ma espiral (hélice cilíndrica)”. Em seguida mostramos a mola e a maneira de calibrá-la com toda
comodidade.
2.7.1
Obtenção de um dinamômetro de precisão 14
O comprimento ` da mola é uma função do peso (intensidade da força) que a
distende. Como a sensibilidade é muito maior, pode-se aferir a caixa de pesos
obtidos pela deflexão da haste com precisão muito maior. Em seguida, obtémse a forma da função ` = f (p), para uma dada mola, construindo-se o gráfico
do comprimento ` contra o peso p.
A mola, a régua para medir seu comprimento e o gráfico [que exprime
a função ` = f (p)] constituem um dinamômetro de precisão. Use 15 pesos de
1, 2, 3, 4, 5, 10, 15, 20 e 25 gramas-força. Observe a curva obtida. Qual a
conclusão? Examine a mola.
14
15
2a experiência.
Apresenta-se uma orientação para a realização do experimento.
u
“ADT-MF” — 2005/11/7 — 8:51 — page 82 — #82
82
Capítulo 2. Regra do paralelogramo
Figura 2.5: Dispositivo para calibração dos dinamômetros de precisão.
Se você vai medir a intensidade da força que distende a mola, é preferível
~ = k (`−`0 ). Faça o gráfico
determinar a função inversa p = λ(`). Determine |F|
dessa função (em papel milimetrado).
Fornecemos três molas para que se disponha de três dinamômetros calibrados para medir intensidade de força nas próximas experiências. Calibre os três
dinamômetros. 16
Nota Algumas observações sobre os cuidados com a calibração dos nossos dinamômetros de mola.
As molas usadas atualmente no IF–UERJ são confeccionadas no torno de nossa
oficina empregando aço-mola inoxidável e estão mais sensíveis que as usadas à época
em que o Prof. Armando redigiu este livro e, além disso, eram confeccionadas manualmente, hoje em torno; por isso as espiras das molas usadas pela primeira vez estejam
geralmente muito juntas, este fato faz com que os gráficos dos dinamômetros feitos
para essas molas não sejam uma reta; enquanto houver espiras juntas, o gráfico não se
mostra linear.
O estudante pode seguir alguns cuidados na calibração desses dinamômetros de
mola:
1. Antes de iniciar a calibrar o dinamômetro, coloque uma carga de 30 gf e deixe-a
oscilando por algum tempo, com isso o material da mola sofre as deformações
16
u Se o leitor não tiver essas molas, elas podem ser conseguidas no Instituto de Física da
Universidade do Estado do Rio de Janeiro (IF–UERJ), no 3o andar do Campus (sala 3001D).
“ADT-MF” — 2005/11/7 — 8:51 — page 83 — #83
83
2.7. Dinamômetros
permanentes necessárias para a gama de forças da experiência, evitando que
ocorram deformações permanentes ainda durante a calibração; para verificar se
essa deformação permanente está ocorrendo, é recomendável que se verifique
após retirar cada uma das cargas se o comprimento da mola sem carga é o
mesmo que o do início da calibração;
2. Há várias maneiras de medir o comprimento da mola, o estudante deve refletir
e adotar um método de medição para que possa reproduzi-lo quando o dinamômetro (depois de calibrado) for usado.
O método mais intuitivo é medir o maior comprimento da mola para dada carga,
porém essa maneira de medir leva a um erro de paralaxe grande porque o ponto
a ser medido está distante da régua.
O método que apresenta o menor erro experimental é o que minimiza o erro de
paralaxe, para tal pode-se proceder da seguinte maneira:
(a) identificar uma das duas alças da mola com uma linha colorida, a linha
também identificará o dinamômetro;
(b) medir sempre da marca da dobra da alça identificada até a última espira
da mola na direção do eixo de simetria da mola, dessa forma, conseguese aproximar a régua e a parte da mola em que se mede o comprimento,
tanto durante a calibração quanto do uso do dinamômetro; é importante
que sempre se meça da marca identificada porque pode ocorrer medida
de comprimento diferente quando feito a partir da outra dobra;
3. Se for usado a interpolação pelo método do erro mínimo médio quadrático, não
se deve levar em conta os pontos medidos que não estejam na mesma tendência
da reta indicada pelas forças maiores.
Note-se ainda a sutileza didática dessa experiência e a da deflexão da haste: as
primeiras medições forçam sempre o estudante estimar o correspondente ao décimo
de milímetro na régua milimetrada.
Orientação para redação de relatórios
u
A toda experiência deve corresponder um relatório conclusivo em moldes técnicos. Tenha sempre em mente que o leitor será pessoa ocupada, seletiva e com muito material
para ler, devendo encontrar rapidamente o que busca no texto, que deve ser objetivo,
mas suficientemente detalhado para possibilitar que o relatado seja reproduzido por
um leitor que não tenha participado da experiência, com resultados dentro da mesma
margem de erro experimental.
Os relatórios de experiências curriculares podem conter apêndices teóricos e explicativos onde o estudante pratica a verbalização do que está aprendendo. Esses
apêndices não devem ser trabalho de colagem, redija-os por suas próprias palavras,
“ADT-MF” — 2005/11/7 — 8:51 — page 84 — #84
84
Capítulo 2. Regra do paralelogramo
por mais difícil que isso possa lhe parecer inicialmente; não perca a oportunidade de
correlacionar o que está sendo estudado nos livros e em aula com o que realiza no
laboratório e com que vivencia no seu dia-a-dia.
Bem, mas como organizar um relatório? Todo relatório deve conter, nessa ordem:
1. Título, que dê idéia concisa do que trata o relatório;
2. Autor e referência de como o encontrar, no caso de relatórios curriculares:
curso e turma;
3. Data, do término da experiência ou da redação do relatório;
4. Resumo, conforme o nome indica é onde se resume o trabalho em poucas linhas
(alguns chamam objetivo, geralmente é o último item a ser redigido);
5. Introdução, onde se indica a motivação do trabalho, o que se pretende concluir
e como está organizado;
6. Seções, onde se expõe propriamente o trabalho;
7. Conclusão, todo relatório termina com uma conclusão;
8. Apêndices, onde se colocam gráficos, tabelas ou tópicos complementares ao
trabalho;
9. Referências bibliográficas, onde se listam o material bibliográfico consultado
ou citado, podendo inclusive incluir relatórios anteriores.
As gramáticas indicam os relatórios como um estilo literário e podem ser consultadas,
mas deve ser interessante que o estudante veja em bibliotecas as revistas técnicas especializadas; independentemente da área técnica a forma de organizar um relatório é
sempre a mesma, o que pode diferir é a forma como é editado; na contracapa das publicações se encontram as instruções para enviar material para submeter à publicação.
Devem ser escritos em papel A4, carta ou almaço, respeitando-se margens (as
margens são importantes para o arquivamento do documento). Quando manuscrito,
com boa letra; quando impressos por processadores de texto, com tipos sóbrios (times
roman ou palatino, 10, 11 ou 12, atualmente os arquivos devem ser processados em
LATEX 2ε ).
Existem manuais de redação de relatórios, prefiro indicar como que se lê profissionalmente um relatório. Primeiro se lê o título; depois o nome do autor e o resumo;
se o assunto interessar, lê-se as referências, por elas se tem uma idéia da atualização
do trabalho; se isso mantiver o interesse, passa-se a ler a introdução; se a leitura da
introdução continuar mantendo o interesse, é bem provável que o trabalho seja lido na
íntegra. É claro que esses primeiros relatórios que você redigirá não serão submetidos
a publicação ou a apreciação administrativa ou burocrática, mas é bom ir treinando
desde já para saber fazê-lo profissionalmente, afinal um curso superior é um curso de
formação profissional, ou não é?
É oportuno destacar que se deve anotar em caderno próprio todos os detalhes importantes, tanto durante a experimentação quanto durante os rascunhos da redação do
“ADT-MF” — 2005/11/7 — 8:51 — page 85 — #85
2.8. Força aplicada em um ponto
relatório, mesmo aqueles detalhes que pareçam tolos ou óbvios. Essa documentação
pode ser útil para relembrar detalhes que tenham passado desapercebidos e que se revelam depois de repensados; use caderno, não use folhas soltas para essas anotações;
folhas soltas se perdem, confundem a cronologia das anotações. . .
2.8
Força F~ aplicada em um ponto P
Agora que já dispomos de dinamômetros para medição de intensidade de força,
vamos nos preparar para verificar experimentalmente a lei de composição de
forças (a regra do paralelogramo).
Convidamos o estudante a fixar uma das extremidades de um dos dinamômetros (já calibrados) em um ponto P de uma estrutura e, amarrando uma linha
de costura na outra extremidade da mola do dinamômetro, aplicar uma força
na linha; mude a direção da força ou a direção da linha; mude a intensidade da
força, conforme ilustrado na Fig. 2.6. Perceba por esse dispositivo a “Aplicação, em um ponto P, de uma força F~ de intensidade, sentido e direção dados”.
Veja o Post. 2 (pág. 89) e conclua.
Figura 2.6: Aplicação da força F~ no ponto P.
85
“ADT-MF” — 2005/11/7 — 8:51 — page 86 — #86
86
Capítulo 2. Regra do paralelogramo
F~
Pq
-
F~
Pq
1 gf
-
1 gf
Pq
F~ -
1 gf
Figura 2.7: Representação por meio de segmentos de reta orientados de uma força F~
de módulo 3 gf aplicada num ponto P.
A força é uma “grandeza orientada”: tem direção, sentido e intensidade
(valor numérico indicado por unidade própria) e também ponto de aplicação.
~ R,
~
Pode ser representada na escritura por uma letra encimada por uma seta: F,
~ etc. Graficamente pode ser representada por um segmento de reta orientado,
A,
cuja direção e sentido são a direção e o sentido da força, cuja origem P é o
ponto de aplicação da força e cujo comprimento, medido com um segmento
que representa o valor numérico da unidade de força, dá (é proporcional) a
intensidade da força. Outras representações serão vistas mais tarde.
Os três segmentos orientados da Fig. 2.7 representam (em escala) a mesma
força 17 F~ de 3 gf, aplicada em P, na direção horizontal e da esquerda para a
direita.
Não confunda a força com o segmento de reta orientado que a representa.
2.9
Experiência
Esta experiência 18 cumpre objetivo duplo: verifica experimentalmente uma
proposição, que adotaremos como o Post. 1 a seguir, e afere a calibração dos
dinamômetros.
Postulado 1. Duas forças aplicadas em um ponto P estão em equilíbrio quando:
1o ) Têm a mesma direção;
2o ) Têm a mesma intensidade;
~
3o ) Têm sentidos contrários, e se denota: F~ 0 = −F.
A Fig. 2.8 orienta a montagem do dispositivo experimental; o estudante
deve ter o cuidado em não estender as molas dos dinamômetros além do correspondente comprimento máximo em sua calibração.
17
u Se o leitor girar ou imaginar girar a figura, perceberá representações de forças de
mesma intensidade em outras direções.
18
Terceira Experiência.
“ADT-MF” — 2005/11/7 — 8:51 — page 87 — #87
87
2.9. Experimento
Figura 2.8: Montagem da terceira experiência.
O objetivo mais importante desta experiência é verificar a condição de
equilíbrio de um corpo pontual (o ponto de contato entre as alças dos dinamômetros “engatados”) sujeito a duas forças, ou seja, queremos verificar se a
experiência não discorda das hipóteses que expressamos no Post. 1, que, por
sua vez, é um caso particular da primeira lei de Newton aplicada a uma partícula em equilíbrio sujeita a apenas duas forças, digamos: F~1 e F~2 . Porém ainda
não temos meios comprovados experimentalmente para medir força, sabemos
apenas medir intensidade de força por meio dos dinamômetros já calibrados.
Note-se que o dinamômetro é incapaz de distinguir duas forças de mesma intensidade e direções diferentes; reporte-se ao ensaio anterior, mude a posição
da linha sem alterar o comprimento da mola do dinamômetro, isso significa o
quê?
Por outro lado, já temos os dinamômetros calibrados, mas ainda não temos
idéia da precisão que eles nos oferecem. Como nossa hipótese é que |F~1 | = |F~2 |,
então temos um meio de aferir a calibração dos dinamômetros. Ora, embora se
esteja medindo um única vez a intensidade |F~1 | e a intensidade |F~2 | , a hipótese
~ significa que se está realizando duas medidas para |F|;
~ dessa
|F~1 | = |F~2 | = |F|
forma, pode-se estimar o erro experimental percentual nessas medições por
“ADT-MF” — 2005/11/7 — 8:51 — page 88 — #88
88
Capítulo 2. Regra do paralelogramo
meio da expressão: 19
ε% =
|F~1 | − |F~2 | |F~1 | + |F~2 |
2
× 100 .
(2.1)
Para essa experiência, recomenda-se que se verifique, pelo menos, três situações diferentes de forças para cada par de dinamômetros, afinal se está querendo verificar um postulado, não será com uma única medição que se verificará, não é? Para melhor analisar os dados da experiência, é recomendável
que se construa um quadro (uma tabela) para cada par de dinamômetros que
contenha: a medida de comprimento para cada dinamômetro em cada configuração; a intensidade de força correspondente a cada medição tirada da lei de
calibração do dinamômetro correspondente e, por fim, o erro relativo para cada
configuração. 20
Observação Se você deseja uma precisão maior, deve levar em conta o peso
da mola. Veja o Probl. 2.33, pág. 108.
2.10
Experiência
Ainda estamos na fase preparatória para a verificação experimental da regra do
paralelogramo. Até o presente estágio sabemos medir intensidade de força, não
sabemos ainda medir direção da força, precisamos saber realizar essa medição;
com este objetivo, queremos com esta experiência verificar experimentalmente
três aspectos: se os fios e os dinamômetros podem ser considerados como ideais (dentro do erro experimental) e, com isso, se podemos associar a direção
do fio à direção da força. Se essas características forem verificadas (dentro do
erro experimental), então saberemos medir força, e não apenas intensidade de
força. Mais formalmente, queremos verificar experimentalmente a viabilidade
da proposição que se segue ser usada com status de postulado.
19
u Indicamos aqui que essa estimativa de incerteza corresponde ao desvio-padrão expe
rimental para uma amostra de duas medidas, com nível de confiança de 95 %, ou de 68 % se
levarmos em conta a correção do fator-t da distribuição de Student.
20
u Se o leitor já tiver conhecimento de ajuste linear por meio do método dos mínimos
quadrados e de faixa de confiança (ver §12.7 e, p. ex., [23]), deverá notar que cada calibração dá
acesso ao intervalo onde está o valor da intensidade da força e seu respectivo nível de confiança,
nesse caso a igualdade entre as duas intensidades de força em equilíbrio será conclusiva até um
nível de confiança de 95 %.
“ADT-MF” — 2005/11/7 — 8:51 — page 89 — #89
2.10. Outro experimento
Figura 2.9: Montagem da quarta experiência.
Postulado 2. Duas forças aplicadas nas extremidades de um fio flexível, inextensível e sem peso estão em equilíbrio quando:
1o ) Têm a mesma direção: F~ 0 k F~ ;
~ ;
2o ) Têm a mesma intensidade: |F~ 0 | = |F|
3o ) Têm sentidos contrários: F~ 0 = −F~ .
A direção do fio é a direção das forças.
Verifique experimentalmente seguindo o esquema da Fig. 2.9.
É interessante e oportuno observar que esta experiência contém a anterior
como caso particular, isso pode ser tirado por dois modos:
. Focalizando a atenção em cada extremidade da linha que interliga os
dinamômetros; cada um destes pontos está em equilíbrio e, daí, podemos
aplicar as conclusões da experiência 3, ou seja o Post. 1. O que você
pode concluir?
. Considerando a experiência anterior como caso limite desta quando o
comprimento do fio intermediário tende a zero.
89
“ADT-MF” — 2005/11/7 — 8:51 — page 90 — #90
90
Capítulo 2. Regra do paralelogramo
Atenção! Este experimento não é repetição do anterior! Apesar de o procedimento ser o mesmo e de fornecerem tabelas onde, para essas molas e para
esses comprimentos de linha, não se deve distinguir qual dos dois experimentos as originaram, é essa não-distinção pelo aspecto das estimativas dos erros
que evidencia podermos considerar o modelo de fio ideal e de dinamômetro
ideal, ou seja a viabilidade da adoção do Post. 2.
Conforme já mencionamos, as molas que estamos usando como dinamômetros são mais leves que as usadas à época em que este livro foi originalmente redigido, mas há como evidenciar em que circunstâncias eles podem
ser considerados dinamômetros ideais, mesmo para dispositivos em que estão
montados diretamente nas linhas (sem uso de roldanas); na montagem da experiência, prenda cada mola na estrutura usando um pequeno pedaço de linha,
em seguida diminua a intensidade da força indicada nos dinamômetros; você
verificará que, para forças muito pequenas, os três pedaços de linha da montagem não estarão alinhados (sobre a mesma reta suporte). Por quê? Em que
circunstâncias o fio poderá ser considerado como ideal? Se você segurar um
pedaço de aproximadamente 50 cm dessa linha e deixá-la frouxa, verá que ela
forma uma barriga; nesse caso você pode considerar a linha como um fio ideal?
2.11
Equilíbrio de três forças aplicadas em um ponto
Três forças em equilíbrio aplicadas nas extremidades de três fios que convergem para um ponto P (Fig. 2.10) se transmitem até esse ponto P (Fig. 2.11). Podemos, assim, conhecer suas direções, sentidos e intensidades, e, deste modo,
estudar a lei segundo a qual elas se equilibram.
Determinam-se as intensidades das forças por meio dos dinamômetros;
encontramos os seguintes valores: 21
|F~1 | = 17 gf, |F~2 | = 21 gf e |F~3 | = 25 gf.
21
u Deve-se ter em mente que os dados numéricos experimentais estão sendo apresentados
de forma simplificada, como ilustração.
O estudante deve anotar cuidadosamente suas medições de a cordo com o dispositivo empregado, i.e., estimando o décimo de milímetro nas medições de comprimento na régua milimetrada do estojo, estimando o décimo de grau no transferidor graduado em graus e estimando o
décimo de grama-força nos gráficos dos dinamômetros em papel milimetrado.
“ADT-MF” — 2005/11/7 — 8:51 — page 91 — #91
2.11. Equilíbrio de três forças aplicadas em um ponto
Figura 2.10: Intensidade de força medida por dinamômetros.
Figura 2.11: Indicação das forças atuando no ponto P.
91
“ADT-MF” — 2005/11/7 — 8:51 — page 92 — #92
92
Capítulo 2. Regra do paralelogramo
2.11.1
Estudo da regra do paralelogramo
Medem-se os ângulos entre as forças F~1 e F~2 , F~1 e F~3 , e F~2 e F~3 , que serão
indicados respectivamente por θ3 , θ2 e θ1 . Esses ângulos darão as direções relativas das forças; o ângulo θ e as coordenadas do ponto P de aplicação das
forças situarão então as forças relativamente à estrutura da montagem propriamente dita. No §2.11.2 mostramos como determinar θ e as coordenadas de P.
Figura 2.12: Montagem para medidas de ângulos.
Determinam-se os ângulos com o transferidor. Valores achados: θ1 = 123◦ ,
θ2 = 137◦ e θ3 = 100◦ .
2.11.2
Localização das forças relativamente à estrutura
As forças se localizam relativamente à estrutura, definindo-se o sistema de coordenadas Oxy, ligado à estrutura, e determinando-se as coordenadas do ponto
de aplicação P relativamente e Oxy. Os ângulos das forças em relação aos eixos são determinados simplesmente pelo ângulo θ, entre o eixos Ox e uma das
forças, por exemplo F~1 , pois já se conhecem os ângulos θ1 , θ2 e θ3 entre as
forças.
Valores achados: x = 15 cm, y = 19 cm, α = 18◦ .
“ADT-MF” — 2005/11/7 — 8:51 — page 93 — #93
2.11. Equilíbrio de três forças aplicadas em um ponto
Figura 2.13: Direções das forças atuando no ponto P.
2.11.3
Medição dos ângulos no plano, convenção
Os ângulos serão considerados com valor relativo à orientação em relação ao
eixo Ox, contra o movimento dos ponteiros de um relógio sobre o plano (sentido trigonométrico):
positivo, se a favor do avanço dos ponteiros de um relógio sobre o
plano;
negativo, se contra o avanço dos ponteiros de um relógio sobre o plano.
No exemplo da Fig. 2.14, o ângulo entre o eixo Ox e a força F~1 é θ = −18◦ ;
entre a força F~1 e o eixo Ox é θ = +18◦ .
2.11.4
A Regra do paralelogramo
A “regra do paralelogramo” é um postulado 22 que diz qual o processo para
substituir duas forças F~1 e F~2 em todos os seus efeitos por uma única força,
~ A força R
~ se denomina resultante de F~1 e F~2 , por sua vez, as forças
digamos R.
22
u
Esse postulado está implícito na primeira lei de Newton, ver §3.3.
93
“ADT-MF” — 2005/11/7 — 8:51 — page 94 — #94
94
Capítulo 2. Regra do paralelogramo
Figura 2.14: Esquema para medição das coordenadas de um ponto.
~ segundo as direções definidas por
F~1 e F~2 são denominadas componentes de R
~
~
F1 e F2 .
~ deve ser tal que, aplicada no ponto P, equilibra ou anula o
A resultante R
~
efeito da força F3 , já que as três forças estão em equilíbrio, por conseguinte,
pelo Post. 1, ela deve ser de mesma direção e mesma intensidade que F~3 mas
de sentido contrário. Deste modo, tem-se um meio de verificar a correção do
~ pela regra do paralelogramo, comparando-se
resultado da determinação de R
~ com F~3 , nos mesmos moldes que da quarta experiência.
R
Postulado 3 (Regra do paralelogramo).
O segmento representativo da resultante de duas forças F~1 e F~2 aplicadas em
um ponto P é obtido pela diagonal do paralelogramo de lados adjacentes, formados pelos segmentos representativos de F~1 e F~2 , a origem desse segmento
sendo o representante do ponto P.
2.11.5
Determinação gráfica
~ meConstrói-se o paralelogramo (Fig. 2.15) e determina-se a intensidade de R,
~
dindo o comprimento do segmento que representa R com o segmento unitário
para traçar os segmentos representativos de F~1 e F~2 , de modo que o ângulo
“ADT-MF” — 2005/11/7 — 8:51 — page 95 — #95
2.11. Equilíbrio de três forças aplicadas em um ponto
Figura 2.15: Determinação gráfica para a
regra do paralelogramo das forças: |F~1 | =
21 gf, |F~2 | = 17 gf, |F~3 | = 25 gf; e ângulos:
θ1 = 137◦ , θ2 = 123◦ , θ3 = 100◦ . No diagrama: φ = 56◦ .
(θ3 ) entre esses segmentos representativos seja igual ao ângulo entre as forças
~ é dada pelo ângulo que R
~ forma com uma das
representadas. A direção de R
~
~
~ e de F~3
forças, por exemplo o ângulo φ entre F1 e R. Como a direção de R
◦
◦
◦
devem coincidir, tem-se: θ2 +φ = 180 ; donde φ = 180 −θ2 = 57 . O erro em φ:
~
∆φ = 1◦ ; 100
(∆φ/φ)
= 2 %. Pela escala da figura, tira-se que |R| = 24,5 gf, daí o
~ R|
~ = 2 %.
erro 100 ∆|R|/|
2.11.5.1
Método gráfico para determinação da resultante
Problema Duas forças F~1 e F~2 de 4 e 5 gf estão aplicadas em um ponto P,
~
fazendo entre si um ângulo θ = 60◦ . Pede-se a resultante R.
Solução A localização do ponto na estrutura onde as forças estão aplicadas
não é dada. Quem propôs o problema conhece a situação da forças, relativamente à estrutura, deste modo, conhecendo a resultante em módulo, direção
e sentido relativamente a uma das forças, conhecerá a situação da resultante
relativamente a estrutura.
Para determinar a resultante pela regra do paralelogramo graficamente, devemos escolher uma escala para representar a intensidade da unidade de intensidade de força (Fig. 2.16). Vamos tomar o segmento de comprimento u:
u
, para representar um grama-força (1 gf) e traçar o “paralelogramo das
forças”, sua diagonal (adjacente aos lados que representam F~1 e F~2 ) fornecerá
~ = F~1+F~2 . Com o segmento
o segmento orientado representativo da resultante R
tomado para representar a unidade de força, mede-se o comprimento representativo da resultante e se obtém sua intensidade. Com o transferidor mede-se o
ângulo φ entre a direção conhecida de F~1 e a resultante.
~ = 7,8 gf ; φ = 33,5◦ = 33◦ 300 . (Veja Fig. 2.16.)
Resposta |F|
95
“ADT-MF” — 2005/11/7 — 8:51 — page 96 — #96
96
Capítulo 2. Regra do paralelogramo
Figura 2.16: Determinação gráfica da resultante e o segmento u cujo comprimento
corresponde a 1 gf.
2.11.6
Determinação trigonométrica
Pelo método trigonométrico usa-se a trigonometria para se obter um expressão
equivalente ao método gráfico da regra do paralelogramo na determinação da
~ de duas forças F~1 e F~2 que fazem entre si um ângulo θ. Na Fig. resultante R
2.17 a força F~1 tem intensidade de 4,0 gf e a F~2 , 5,0 gf, o ângulo entre elas
sendo 60,0◦ , a mesma situação do problema anterior. As forças estão aplicadas
~ tendo
no ponto O e a resultante determinada pela regra do paralelogramo é R,
origem em O e extremidade em B. De B tiramos o segmento BQ, obtendo-se o
B
F~2
~
R
θ
φ
O
F~1
A
Q
Figura 2.17: Ilustração para o método trigonométrico para a determinação da resultante.
“ADT-MF” — 2005/11/7 — 8:51 — page 97 — #97
97
2.11. Equilíbrio de três forças aplicadas em um ponto
triângulo retângulo OBQ. O lado BA do paralelogramo é igual ao comprimento
do segmento que representa F~2 , ele forma com OQ o mesmo ângulo que F~2 .
2
2
2
~ 2 . Mas BQ = BA sen(θ)
Pelo teorema de Pitágoras se tem: OQ +QB = OB = |R|
23
e OQ = OA+AQ, daí, OQ = |F~1 |+|F~2 | cos(θ), portanto
h
i
~ 2 = |F~2 |2 sen2 (θ) + |F~1 | + |F~2 | cos(θ) 2
|R|
= |F~2 |2 sen2 (θ) + |F~1 |2 + 2 |F~1 | |F~2 | cos(θ) + |F~2 |2 cos2 (θ)
h
i
= |F~1 |2 + 2 |F~1 | |F~2 | cos(θ) + |F~2 |2 sen2 (θ) + cos2 (θ) ,
donde finalmente,
~ 2 = |F~1 |2 + |F~2 |2 + 2 |F~1 | |F~2 | cos(θ) .
|R|
~ que é dada, por exemplo, pelo ângulo de R
~
Resta determinar a direção de R
com F~1 , isto é, pelo ângulo φ, tal que:
tan(φ) =
|F~2 | sen(θ)
.
|F~1 | + |F~2 | cos(θ)
Resumimos as duas relações fundamentais:
q
~ = |F~1 |2 + |F~2 |2 + 2 |F~1 | |F~2 | cos(θ)
|R|
tan(φ) =
|F~2 | sen(θ)
,
|F~1 | + |F~2 | cos(θ)
(2.2)
que determinam completamente a resultante em módulo, direção e sentido,
sendo pois a regra do paralelogramo expressa trigonometricamente.
Vejamos a solução do problema proposto:
~ 2 = 42 + 52 + 2×4×5×cos(60◦ ) = 16 + 25 + 40 1
|R|
2
2
= 61 gf
√
~ = 61 ⇒
~ = 7,81 gf
|R|
|R|
5 × 0,87 4,35
φ = 33◦ 480 .
=
= 0,669 ⇒
4 + 2,5
6,5
Observe que o resultado é quase o mesmo que o obtido graficamente na pág. 95
(correspondente à Fig. 2.16). A diferença entre os resultados das duas soluções
estão dentro do erro experimental.
tan(φ) =
23
u
Essa é a demonstração da lei dos cossenos para o triângulo OAB.
“ADT-MF” — 2005/11/7 — 8:51 — page 98 — #98
98
Capítulo 2. Regra do paralelogramo
2.11.6.1
Exemplo
Suponha-se que o ângulo entre as duas forças do exemplo anterior seja 120◦ .
~
Determine R.
Veja Fig. 2.18. Observe-se que agora o
−−→
sentido de AQ é contrário ao de F~1 , sendo traduzido por projeção negativa, o segmento AQ sendo:
−−→
−−→ −−→
|OQ| = |OA| − |AQ| = |F~1 | − |F~2 | cos(60◦ ) .
Na trigonometria: cos(π − θ) = − cos(θ), no
exemplo: cos 120◦ = − cos 60◦ , por isso a Figura 2.18: Ilustração para o mérelação
todo trigonométrico para a determi~ 2 = |F~1 |2 − |F~2 |2 + |F~1 | |F~2 | cos(θ)
|R|
nação da resultante, outro exemplo.
ainda é válida quando θ é maior que 90◦ :
~ 2 = 42 + 52 + 2×4×5×cos(120◦ )
|R|
= 16 + 25 − 40×cos(60◦ )
1
= 41 − 40×cos(60◦ ) = 41 − 40× = 21 gf 2 ,
2
√
~
|R| = 21 = 4,58 gf , e
tan(φ) =
logo
5×sen(120◦ )
5×0,87
4,35
=
=
= 2,9 .
◦
4 + 5×cos(120 ) 4 − 5×0,5
1,5
Donde φ = 71◦ .
Verifique graficamente esse resultado.
2.11.7
2.11.7.1
Método analítico para determinação da resultante
Preliminares: decomposição de uma força segundo duas
direções dadas
Decompor uma força F~ segundo duas direções dadas δ1 e δ2 é determinar duas
forças outras F~1 e F~2 cujas direções sejam δ1 e δ2 , respectivamente, e tais
que F~ seja a resultante de F~1 e F~2 pela regra do paralelogramo. F~1 e F~2 se
“ADT-MF” — 2005/11/7 — 8:51 — page 99 — #99
2.11. Equilíbrio de três forças aplicadas em um ponto
Figura 2.19: Decomposição de forças segundo direções δ1 e δ2 por meio da regra
do paralelogramo.
Figura 2.20: Decomposição de forças segundo direções ortogonais δ1 e δ2 .
denominam componentes de F~ segundo as direções δ1 e δ2 . Dadas as direções
δ1 e δ2 , veja Fig. 2.19, e a força F~ aplicada no ponto O, pelas extremidades
de F~ traçam-se paralelas a δ1 e δ2 , determinando-se um paralelogramo cujos
lados serão os segmentos representativos de F~1 e F~2 . Se as duas direções são
ortogonais, é fácil achar F~1 e F~2 , desde que se conheçam o ângulo entre F~ e
uma das direções, por exemplo δ1 na Fig. 2.20; as direções D1 e D2 podem ser
consideradas as direções dos eixos ortogonais dos x e dos y. Se θ é o ângulo
~ então se tem:
entre o eixo dos x e a força F,
~
~
~
F1 = F1 ~u1 = |F| cos(θ) ~u1 ⇒ F1 = |F| cos(θ) = F x
~ sen(θ) ~u2 ⇒ F2 = |F|
~ sen(θ) = Fy .
F~2 = F2 ~u2 = |F|
As forças F~ x = F~1 e F~y = F~2 se chamam componentes da força F~ nas direções
dos eixos dos x e dos y; por sua vez, os números reais F x e Fy , em unidade de
intensidade de força, chamam-se projeções da força F~ sobre os eixos dos x e
dos y, respectivamente.
2.11.7.2
u
Uma conclusão das experiências anteriores Na calibração dos dinamômetros usamos várias forças que possuíam em comum a
mesma direção (vertical local) e mesmo sentido (de cima para baixo). Nas experiências que lhes seguiram, usamos forças de diferentes direções e verificamos a lei de
composição de forças não-paralelas. Neste parágrafo estamos pensando uma situação
nova: não estamos trabalhando diretamente apenas com as intensidades de forças, mas
com direções; além disso, sabemos que forças não podem ser expressas apenas por
números que denotam suas intensidades; dessa forma: como podemos exprimir uma
força com uma determinada direção, com um determinado sentido e uma determinada
intensidade?
99
“ADT-MF” — 2005/11/7 — 8:51 — page 100 — #100
100
Capítulo 2. Regra do paralelogramo
Observe-se a dificuldade que estamos encontrando em manter uma notação que
trate as forças por todos seus aspectos algébricos, de tal modo que a lei de composição respeite sempre a regra do paralelogramo. Estamos diante de uma situação delicada; entendê-la e resolvê-la é um passo seguro para melhor compreender as chamadas
grandezas vetoriais, categoria na qual as forças se enquadram por sua maneira de se
comporem.
Quando as forças com que se trabalha são todas paralelas, observamos que nos
basta informar a intensidade da força e o seu sentido em relação a uma outra força com
a mesma direção. Com essas informações não há dúvida de que força se está referindo.
Isso indica que podemos sempre pensar forças paralelas F~a e F~b sob a forma: F~a =
αF~b , onde α ∈ R e tal que: α > 0 se as forças paralelas F~a e F~b possuem o mesmo
sentido e α < 0 se as forças paralelas F~a e F~b possuem sentidos contrários; e mais:
~ nessa
|F~a | = |α| |F~b |. Por exemplo, dada a direção δ, podemos considerar uma força U
~
~
direção (com sentido bem definido, portanto U , 0) cuja intensidade seja igual a uma
(1) unidade de intensidade de força; assim, qualquer outra força F~ na direção δ poderá
~ sendo f ∈ R e |F|
~ = | f |, em termos da unidade de força,
ser escrita como F~ = f U,
~ tal que |U|
~ = 1 unidade de força. Não se pode confundir a força
uma vez que usamos U
F~ com o número real f que se usa para representá-la em termos da força unitária
~ Como estamos usando a força unitária U,
~ o real f é desprovido de unidade; se
U.
quisermos que f seja expresso por uma unidade de força, deveremos lançar mão de
~ por exemplo: ~u = (1/|U|)
~ U,
~ agora se pode
um objeto mais abstrato que a força U,
~
~
escrever: F = f U = F~u, onde F = f × (1 unidade de força). E agora, para a obtenção
de ~u, não se precisa usar uma força de intensidade igual a uma unidade de força,
qualquer força não-nula na direção δ, por exemplo, nos fornece ~u, observe-se ainda
~ −1 U
~ = Û.
que ~u0 = (−1)~u possui sentido oposto ao do objeto ~u. Usa-se denotar: û = |U|
2.11.8
Regra do paralelogramo expressa analiticamente
Agora consideremos que as forças F~1 e F~2 estejam aplicadas no ponto P. A
~ Veja Fig. 2.21. Projetam-se as forças sobre os eixos x e y,
resultante delas é R.
o ângulo entre o eixo dos x e a força F~1 é θ1 , entre o eixo dos x e F~2 é θ2 ,
donde se tem:
~
F1x
F~1y
F~2x
F~
2y
=
=
=
=
F1x ~u x = |F~1 | cos(θ1 ) ~u x
F1y ~uy = |F~1 | sen(θ1 ) ~uy
F2x ~u x = |F~2 | cos(θ2 ) ~u x
F2y ~uy = |F~2 | sen(θ2 ) ~uy
⇒
⇒
⇒
⇒
F1x = |F~1 | cos(θ1 )
F1y = |F~1 | sen(θ1 ) ;
F2x = |F~2 | cos(θ2 )
F2y = |F~2 | sen(θ2 ) .
~ tem projeções R x e Ry que são iguais à soma das
Observe-se que a resultante R
“ADT-MF” — 2005/11/7 — 8:51 — page 101 — #101
101
2.11. Equilíbrio de três forças aplicadas em um ponto
y
F~1y
~
R
F~2y
F~2
F~1y
~uy
O ~u x
φ
θ2
P
F~1
s
θ1
F~1x
F~2x
x
F~2x
Figura 2.21: Método analítico para a regra do paralelogramo.
projeções sobre os eixos dos x e dos y de F~1 e F~2 respectivamente, ou seja:
R x = F1x + F2x = |F~1 | cos(θ1 ) + |F~2 | cos(θ2 )
Ry = F1y + F2y = |F~1 | sen(θ1 ) + |F~2 | sen(θ2 )
ou em termos das forças componentes nas direções Ox e Oy:
h
i
~ x = F~1x + F~2x = (F1x + F2x ) ~u x = |F~1 | cos θ1 + |F~2 | cos θ2 ~u x
R
h
i
~ y = F~1y + F~2y = F1y + F2y ~uy = |F~1 | sen θ1 + |F~2 | sen θ2 ~uy .
R
Observe que a regra do paralelogramo é expressa analiticamente por:
R x = |F~1 | cos θ1 + |F~2 | cos θ2
Ry = |F~1 | sen θ1 + |F~2 | sen θ2 ;
ou
h
i
~ x = |F~1 | cos θ1 + |F~2 | cos θ2 ~u x
R
h
i
~ y = |F~1 | sen θ1 + |F~2 | sen θ2 ~uy .
R
Porquê? Veja os lados do paralelogramo e suas projeções (componentes).
~ forma com o eixo dos x basta ver que:
Para achar o ângulo φ que R
tan(φ) =
F1y + F2y
Ry
=
,
R x F1x + F2x
“ADT-MF” — 2005/11/7 — 8:51 — page 102 — #102
102
Capítulo 2. Regra do paralelogramo
pois o ângulo entre os eixos coordenados foi tomado como igual a 90◦ , segue~ 2 = R2x +R2y , logo, substituindo R x e Ry em função dos valores
se ainda que: |R|
conhecidos, tem-se:
r
~1 | cos θ1 +|F~2 | cos θ2 2 + |F~1 | sen θ1 +|F~2 | sen θ2 2
~ =
|
F
|
R|
|F~1 | sen θ1 + |F~2 | sen θ2
.
tan(φ) = ~
|F1 | cos θ1 + |F~2 | cos θ2
2.12
Regra do triângulo
Deve-se a Simon Stevinus (1548–1620) a “regra do triângulo”, que é um postulado dando a condição para que três forças aplicadas em um ponto estejam
em equilíbrio, e que se pode enunciar do seguinte modo: [veja Fig. 2.22 (a e
b)]
Se três forças aplicadas em um ponto estão em equilíbrio, então
suas intensidades são proporcionais aos lados de um triângulo paralelos às direções dessas forças.
Essa regra não é mais que a regra do paralelogramo, em conjunção com a
primeira lei de Newton, o que é fácil de ver se considerarmos que uma das
forças é sempre de sentido contrário à resultante das outras duas. A regra do
paralelogramo se deve a Pierre Varignon (1654–1722) que a enunciou 80 anos
depois da regra do triângulo de Stevinus, editada postumamente em 1725.
Observe-se que o triângulo não é único, veja Fig. 2.22 (b), a “regra do triângulo” diz que se as três forças F~1 , F~2 e F~3 aplicadas no ponto P estão em
equilíbrio, então |F~1 | = KL1 ; |F~2 | = KL2 e |F~3 | = KL3 , em que L1 , L2 e L3 são
os lados de um triângulo, paralelos às forças em equilíbrio, respectivamente.
Os lados do triângulo podem ser tomados para segmentos representativos das
forças, pelo que já se viu, bastando orientá-los, veja Fig. 2.22 (c). É fácil ver
que a resultante de F~1 e F~2 , por exemplo, obtida pela regra do paralelogramo,
~ = −F~3 . Veja Fig. 2.22 (d). O que mostra que a regra do triângulo
dará a força R
e a do paralelogramo são equivalentes (e também equivalentes à regra do fechamento da poligonal).
2.12.1
Teorema de Lamy
Teorema 2.12.1. (B. Lamy, Traité de Mecanique, 1679)
Se três forças F~1 , F~2 e F~3 aplicadas em um ponto estão em equilíbrio, então
“ADT-MF” — 2005/11/7 — 8:51 — page 103 — #103
103
2.12. Regra do triângulo
Figura 2.22: Regra do paralelogramo (a); regra do triângulo (b); regra do fechamento da poligonal (c) e (d).
valem as relações:
|F~1 |
|F~2 |
|F~3 |
=
=
,
sen(θ1 ) sen(θ2 ) sen(θ3 )
(2.3)
em que θ1 , θ2 e θ3 são os ângulos opostos às forças F~1 , F~2 e F~3 , respectivamente.
De fato, pela regra do triângulo de Simon Stevinus, os lados L1 , L2 L3 do
triângulo, associado às forças, são proporcionais às forças que lhes são paralelas, respectivamente: L1 = k |F~1 | , L2 = k |F~2 | e L3 = k |F~3 | . Mas, no triângulo,
os lados estão para os senos dos ângulos numa razão constante: (Fig. 2.23)
L1
L2
L3
=
=
,
sen(α1 ) sen(α2 ) sen(α3 )
(2.4)
em que α1 , α2 e α3 são os ângulos internos do triângulo de Stevinus, opostos
aos lados L1 , L2 e L3 , respectivamente. Ora, os suplementos dos ângulos α1 ,
α2 e α3 são os ângulos θ1 , θ2 e θ3 , respectivamente, sendo assim:
sen(θ1 ) = sen(α1 )
sen(θ2 ) = sen(α2 )
sen(θ3 ) = sen(α3 ) .
Donde se segue a igualdade (2.3), o fator k podendo ser eliminado pela lei do
corte.
“ADT-MF” — 2005/11/7 — 8:51 — page 104 — #104
104
Capítulo 2. Regra do paralelogramo
Figura 2.23: Decomposição de forças segundo direções dadas por meio da regra do
paralelogramo.
Problemas
Problema 2.1. Demonstre a relação (2.4) para um triângulo qualquer.
Resposta Do vértice A do triângulo ABC tira-se a altura h1 e se tem: (veja
Fig. 2.24)
h1 = L1 sen(β) = L2 sen(α).
Do vértice CE se tira a altura h2 e se tem:
h2 = L3 sen(β) = L2 sen(γ).
Do que se seguem as relações (2.4).
Figura 2.24: Alturas para a área do triângulo.
Se você não souber dizer, explicar e escrever as respostas das perguntas
a seguir, volte ao livro e estude até saber responder, explicar e escrever as
respostas sem hesitação.
“ADT-MF” — 2005/11/7 — 8:51 — page 105 — #105
2.12. Regra do triângulo
Problema 2.2. Se você entendeu realmente este capítulo, tente explicá-lo para
um leigo. Responda as perguntas: o que é observação? o que é fato bruto? o
que é fato científico? Dê exemplos.
Como você construiria uma caixa de pesos a partir de um padrão previamente escolhido?
Problema 2.3. Você poderia descobrir a lei de interdependência existente entre duas grandezas físicas sen conhecer o porquê dessa lei? Dê exemplos.
Problema 2.4. Como você estabeleceria a lei de interdependência entre essas
duas grandezas?
Problema 2.5. Como você interpreta uma lei estabelecida experimentalmente?
Problema 2.6. Que são grandezas homogêneas? Que são grandezas físicas?
Problema 2.7. O que é interpolação? Extrapolação? É lícito extrapolar resultados experimentais? Quando? Em que casos?
Problema 2.8. Quantos tipos de erros você conhece? Cite-os. Qual a diferença entre os vários tipos de erros?
Problema 2.9. Que são erros experimentais? O que significa valor absoluto
ou real de uma grandeza? O valor absoluto de uma grandeza é conhecido
sempre ou nunca é conhecido? Dê exemplos.
Problema 2.10. O que significa valor médio de uma grandeza? Como se calcula esse valor médio? O que é dispersão? Desvio? Resíduo?
Problema 2.11. O que é erro médio da média? Como se calcula?
Problema 2.12. O que é erro relativo? Erro relativo percentual? Erro tolerável?
Problema 2.13. O que é algarismo significativo de um número?
Problema 2.14. Quais as normas para efetuar o cálculo com dados experimentais? Como se faz o arredondamento de números?
Problema 2.15. Faça os gráficos dos três dinamômetros de mola, construindo
dinamômetros de precisão. (Se você ainda não os fez)
Problema 2.16. Como você pode aplicar uma força F~ de direção, sentido e
intensidade conhecidos em um dado ponto?
105
“ADT-MF” — 2005/11/7 — 8:51 — page 106 — #106
106
Capítulo 2. Regra do paralelogramo
~ A repreProblema 2.17. Como você representa graficamente uma força F?
sentação dessa força é única? Como você representa graficamente uma força
de intensidade igual a zero? A representação desta força é única?
Problema 2.18. Qual a conseqüência dos Post. 1 e Post. 2? Se um fio inextensível e sem peso está preso por uma extremidade em um prego e você puxa
o fio pela outra extremidade com uma força F~ e o fio fica em equilíbrio (parado, mais tarde veremos que o movimento retilíneo e uniforme também é uma
situação de equilíbrio), qual a conseqüência para o prego?
Problema 2.19. Monte a experiência (se você ainda não o fez) e verifique o
Post. 1 para cinco (5) pares de forças diferentes. Calcule o erro relativo percentual do seguinte modo:
faça a diferença entre os dois valores achados e
tome o módulo: f = |F~1 | − |F~2 |, e divida o resultado pelo valor da menor,
fmin , das duas intensidades de força |F~1 | ou |F~2 |, e multiplique por 100:
!
f
.
ε% = 100×
fmin
O erro assim obtido deverá ser inferior a 3 % para estudantes principiantes.
Problema 2.20. Monte a experiência para verificar o Post. 2 e proceda como
foi indicado no Probl. 2.19, determinando 5 pares de forças (com direções aleatórias) para cada par de dinamômetros e os correspondentes erros relativos
percentuais.
Problema 2.21. Como você pode aplicar três forças quaisquer em um ponto?
Você poderia estudar e descobrir como duas forças se compõem quando aplicadas em um ponto? O que quer dizer “compor duas forças”?
Problema 2.22. Enuncie a regra do paralelogramo. Explique esta regra por
suas próprias palavras.
Problema 2.23. Monte a experiência para verificar (experimentalmente) a
regra do paralelogramo conforme indicado nas Figs. 2.10 − 2.14. Faça três
verificações, com ângulos θ1 , θ2 e θ3 diferentes de 90◦ e 120◦ . O valor das
intensidades das forças devem ser superiores a 10 gf, a fim de que o peso
das molas possa ser desprezado por ser muito pequeno em confronto com as
intensidades das forças aplicadas nos fios. Para cada uma das configurações,
use os três métodos para a verificação: gráfico, trigonométrico e analítico.
Na verificação da regra do paralelogramo o erro máximo admissível será
5 %, calculado conforme indicado no §2.11.5, pág. 94.
“ADT-MF” — 2005/11/7 — 8:51 — page 107 — #107
2.12. Regra do triângulo
Problema 2.24. Monte a experiência para verificar o Post. 3, usando ângulos
de 90◦ e 120◦ entre as forças F~1 e F~2 em duas montagens sucessivas e verifique
a regra do paralelogramo para a terceira força que equilibra as forças F~1 e
F~2 . Use os três métodos para “resolver” a regra do paralelogramo. Qual o
significado da resultante?
Problema 2.25. Enuncie e demonstre o teorema de Lamy.
Problema 2.26. Demonstre a equação (2.4) que expressa teorema de Lamy
para um triângulo oblíquo qualquer.
(Sugestão: escreva a expressão da área do triângulo em termos da altura de
cada lado.)
Problema 2.27. Aplique o teorema de Lamy aos dados da experiência do
Probl. 2.23 para calcular uma das forças usando os valores experimentais
para as outras duas. Calcule os erros com essas determinações.
Problema 2.28. Duas forças, F~1 de 3 kgf e F~2 de 4 kgf, fazem entre si um
~ = F~1 + F~2 pelos três métodos.
ângulo θ = 150◦ . Ache a resultante R
~ e duas forças F~1 e F~2 é igual a 5 kgf e forma
Problema 2.29. A resultante R
◦
~
com F1 um ângulo de 30 , a intensidade de F~1 é 3 kgf. Qual a intensidade de
F~2 e que ângulo forma com F~1 ? Use os três métodos.
~ de duas forças F~1 e F~2 tem intensidade igual
Problema 2.30. A resultante R
~ é 30◦ e entre R
~ e F~2 é 40◦ . Determine as
a 5 kgf. O ângulo entre F~1 e R
intensidades de F~1 e de F~2 . Use os três métodos.
Problema 2.31. As forças F~1 e F~2 têm intensidade de 3 kgf e 5 kgf. A força
F~1 faz com uma reta r um ângulo de 30◦ . Qual o ângulo de F~2 com a reta r a
fim de que a resultante tenha a direção da reta? Use os três métodos.
Problema 2.32. Três forças de intensidade 3 kgf, 4 kgf e 5 kgf estão aplicadas
em um ponto. O ângulo entre as duas primeiras é 60◦ . Sabendo-se que as três
forças estão em equilíbrio, qual a intensidade da terceira força e qual o ângulo
que a terceira força forma com a primeira?
Você se lembra da trigonometria? Não a estudou nunca? Pois terá que
estudá-la e entendê-la agora. Comece hoje mesmo.
1. Como você define as seguintes funções trigonométricas de um argumento θ: sen θ, cos θ, tan θ, sec θ, csc θ e cot θ ?
107
“ADT-MF” — 2005/11/7 — 8:51 — page 108 — #108
108
Capítulo 2. Regra do paralelogramo
Figura 2.25: Primeira montagem para
o Probl. 2.33.
Figura 2.26: Segunda montagem para
o Probl. 2.33.
2. Demonstre que
sen2 (θ) + cos2 (θ) = 1 .
3. Demonstre que
sen(α+β) = sen(α) cos(β) + cos(α) sen(β) .
4. Demonstre que
cos(α+β) = cos(α) cos(β) − sen(α) sen(β) .
5. Demonstre que
tan(α+β) =
tan(α) + tan(β)
.
1 − tan(α) tan(β)
6. Escreva a expressão de: sen(α−β) , cos(α−β) , tan(α−β) ,
sen(2α) , cos(2α) , tan(2α) .
7. Demonstre que
α−β
sen(α) + sen(β) = 2 sen( α+β
2 ) cos( 2 ) .
8. Demonstre que
α−β
cos(α) + cos(β) = 2 cos( α+β
2 ) cos( 2 ) .
sen2 (α) = 12 1 − cos(2α) .
cos2 (α) = 12 1 + cos(2α) .
9. Demonstre que
10. Demonstre que
Observação No decorrer do curso de Física vamos precisar de todas as relações anteriores para o desenvolvimento do estudo tanto da Física Experimental
quanto da Física Teórica.
Problema 2.33. Precisão da medição da força aplicada em um ponto.
Observe-se que o dinamômetro foi calibrado na vertical, obtendo-se o alongamento da mola produzido pelo peso colocada na sua extremidade livre. Neste
caso, na curva de calibração do dinamômetro não entra o peso da mola. Faça a
montagem conforme indicada na Fig. 2.25. Quando você mede o comprimento
da mola M2 , a curva de calibração feita dá corretamente a força F~2 que puxa
“ADT-MF” — 2005/11/7 — 8:51 — page 109 — #109
2.12. Regra do triângulo
a extremidade B. Mas, na mola superior, atuará essa força determinada pelo
comprimento M2 mais o peso da mola M2 . Porquê? Na medição da intensidade da força pelo dinamômetro da mola M1 , deve-se pois acrescentar o
peso da mola M2 , obtendo-se a intensidade |F~1 | que atua em P. Inverta a posição da haste AB, veja Fig. 2.26, e determine as forças aplicadas no ponto
P. Agora, à intensidade da força F~20 medida pelo dinamômetro da mola M2
deve-se adicionar o peso da mola M1 que passou para baixo. A intensidade da
força F~10 , medida pelo dinamômetro da mola M1 nessa nova posição, é dada
corretamente pela curva de calibração do dinamômetro M1 . Tire a média de
|F~1 | e |F~10 |, e de |F~2 | e |F~20 |, e compare os resultados. E se você colocar a haste
na posição horizontal, o que acontece? Atenção, observe que quando você calibra o dinamômetro, sua extremidade na qual está o peso gira, tendendo a
abrir a expira (aumentar o raio da seção reta), quando você engancha as duas
molas no ponto P, pode acontecer que uma das molas pode impedir a outra
de girar, ocasionando erro na medição da força aplicada em P. Procure colocar as duas espiras enganchadas no ponto P fazendo um certo ângulo entre
si, ficando livres para girar; ou então, prenda as duas molas nos pontos A e
B usando um pequeno pedaço de linha, o que permitirá que as molas fiquem
nas mesmas condições sob as quais foram calibradas (verifique). E na regra
do paralelogramo, como se fará a correção?
Problema 2.34. Suponha que você faça a montagem da Fig. 2.27, em que os
Figura 2.27: Montagem do problema 2.34.
eixos (de simetria) das molas fazem um ângulo θ com a horizontal. Como levar
em conta o peso das molas nas forças aplicadas em P? Decomponha o peso
de cada mola na direção do eixo das molas e na direção ortogonal ao eixo, e
pense como deve levar em conta essas componentes no valor das intensidades
das forças dadas pelos comprimentos de cada mola na curva de calibração
dos dinamômetros.
109
“ADT-MF” — 2005/11/7 — 8:51 — page 110 — #110
110
“ADT-MF” — 2005/11/7 — 8:51 — page 111 — #111
Capítulo 3
Grandezas Vetoriais ∗
3.1
Associatividade da regra do paralelogramo,
resultante de n forças atuando em um ponto
Vejamos agora o caso de várias forças aplicadas simultaneamente num ponto
P. Note-se que a regra do paralelogramo, referindo-se a apenas duas forças F~1
e F~2 , não abrange o caso de n forças aplicadas em um ponto, não sabemos qual
a seqüência da composição das n forças. Em que ordem as devemos compor?
Somando F~1 e F~2 e depois F~3 e assim por diante, ou em outra ordem? Observe-se que a enumeração das forças é arbitrária. Desse modo, asseverar que se
pode aplicar a regra do paralelogramo, sucessivamente em qualquer ordem, às
n forças que atuam em um ponto é admitir um outro postulado ou princípio:
Postulado 4. A resultante de n forças atuantes em um ponto é obtida aplicando-se a regra do paralelogramo sucessivamente aos pares de forças em
qualquer ordem.
Observações
1. O Post. 3, ou a regra do paralelogramo, considera que a composição de
forças é comutativa, isto é:
F~1 + F~2 = F~2 + F~1 .
∗
Ver o Preâmbulo na pág. 586.
111
“ADT-MF” — 2005/11/7 — 8:51 — page 112 — #112
112
Capítulo 3. Grandezas Vetoriais
2. O Post. 4, agora enunciado, considera que a composição de forças goza
da propriedade associativa:
F~1 + F~2 + F~3 = F~1 + F~2 + F~3 .
~ de n forças são os mesmos já
Os métodos para se obter a resultante R
estudados. Voltamos a examinar cada um deles.
3.1.1
Método gráfico
Para fixar idéia, vamos supor apenas cinco (5) forças atuantes em um ponto,
conforme se vê no esquema de montagem da Fig. 3.1. As forças são F~1 , F~2 ,
Figura 3.1: As forças F~1 , F~2 , F~3 , F~4 e F~5 equilibram a força que
atua no fio OP.
F~3 , F~4 e F~5 de intensidades 30 gf, 20 gf, 10 gf, 30 gf e 35 gf, respectivamente;
estão aplicadas em um ponto O, e de tal modo que formam com a força F~1 os
ângulos: θ2 = 30◦ , θ3 = 60◦ , θ4 = 150◦ , θ5 = 220◦ , respectivamente. A Fig. 3.2 ilustra o problema; aplicamos a regra do paralelogramo sucessivamente na
~1 ; R
~ 1 + F~3 = R
~2 ; R
~ 2 + F~5 = R
~3 ; R
~ 3 + F~4 = R
~,
seguinte ordem: F~1 + F~2 = R
~ é a resultante do sistema dessas cinco forças aplicadas no ponto O,
em que R
isto é, substitui todas as cinco forças atuantes em O em todos seus efeitos; por
exemplo, equilibrará uma força de mesma intensidade, mesma direção e de
sentido contrário que atua ao longo do fio OP.
Observação Nas figuras deixamos de colocar os ângulos entre as forças, e
na Fig. 3.2 a escala é duas vezes maior que na Fig. 3.1; deixamos também de
“ADT-MF” — 2005/11/7 — 8:51 — page 113 — #113
113
3.1. Associatividade da regra do paralelogramo
Figura 3.2: Composição de forças por
~1 ; R
~ 1+ F~3 = R
~2 ; R
~ 2+ F~5 =
pares: F~1+ F~2 = R
~
~
~
~
R3 ; R3 + F 4 = R .
Figura 3.3: Composição de forças pelo fechamento da poligonal de segmentos
equipolentes às forças.
desenhar o paralelogramo de forças na obtenção das resultantes parciais. O
resultado é sempre o mesmo, seja qual for a ordem seguida para se obterem as
resultantes de cada par de forças. O estudante deve fazer o diagrama para obter
~ do exemplo dado e verificar que essa composição de forças goza
a resultante R
da propriedade associativa.
Na Fig. 3.3 reproduzimos o exemplo da Fig. 3.2. Compusemos F~1 com F~2 ,
~ 1 , depois R
~ 1 com F~3 , obtendo-se R
~ 2 , em seguida R
~ 2 com a força
obtendo-se R
~
~
~
~
~
F4 , obtendo-se R3 e finalmente R3 com F5 para obter R . Mas, ao aplicarmos
a regra do paralelogramo nesta ordem, fomos traçando segmentos paralelos,
de mesmo sentido e mesmo comprimento que os segmentos representativos
das forças F~1 , F~2 , F~3 , F~4 e F~4 a partir da extremidade P1 do segmento
representativo de F~1 , e das extremidades P2 , P3 e P4 de cada segmento representativo de força.
3.1.2
Segmentos equipolentes a um outro
~ um outro segmento paralelo, de mesmo sentido
Seja um segmento orientado A;
~ se denomina segmento equipolente ao segmento
e mesmo comprimento que A
~ Na Fig. 3.3, traçamos da extremidade P1 de F~1 um segmento equipolente ao
A.
segmento representativo de F~2 , obtendo P2 , da extremidade P2 do segmento
−−−−→
P1 P2 equipolente, desenhou-se um outro segmento equipolente a F~3 , obteve-se
assim o ponto P3 de onde se traçou o segmento equipolente a F~4 , obtendo-se o
ponto P4 , de onde se traçou o segmento equipolente a F~5 . Chegamos assim ao
−−−→ −−−−→ −−−−→ −−−−→ −−−−→
ponto P5 , tendo-se traçado uma linha poligonal OP1+P1 P2+P2 P3+P3 P4+P4 P5 . A
−−→
~ será obtida por meio do segmento orientado −
resultante R
OP5 que o representa
“ADT-MF” — 2005/11/7 — 8:51 — page 114 — #114
114
Capítulo 3. Grandezas Vetoriais
e fecha a poligonal. É óbvio que a resultante será nula se o ponto P5 , que é a
~ coincidir com o ponto
extremidade do segmento que representa a resultante R,
O (poligonal fechada). O estudante deverá aplicar este processo tomando outra
seqüência de segmentos equipolentes, alterando a ordem de composição de
forças; obterá outra poligonal que terá o mesmo ponto final P5 , portanto a
resultante determinada pelo segmento que a fecha será a mesma que a anterior.
3.1.3
Regra do polígono
Costuma-se chamar de regra do polígono ou regra do fechamento da poligonal
ao processo de obtenção da resultante de n forças aplicadas em um ponto,
conforme explicado anteriormente. O estudante deve lembrar-se que a regra
do polígono se obtém a partir do Post. 2.
O método gráfico é muito importante e pode fornecer resultados de precisão suficiente para trabalhos técnicos. O estudo do equilíbrio de forças (Estática) graficamente denomina-se Grafostática.
Não vamos prosseguir com o método gráfico.
3.1.4
Método trigonométrico
Com o método trigonométrico (§2.11.6) também podemos obter a resultante de
n forças aplicadas em um ponto. De fato, a soma de F~1 + F~2 nos dá a resultante
~ 1 tal que:
R
~ 1 |2 = |F~1 |2 + |F~2 |2 + 2 |F~1 | |F~2 | cos(θ2 )
|R
|F~2 | sen(θ2 )
tan(ϕ1 ) =
,
|F~1 | + |F~2 | cos(θ2 )
~ 1 . Achemos a resultante R
~ 2 de R~1 e F~1 , o
em que ϕ1 é o ângulo entre F~1 e R
~
~
~
ângulo entre R1 e F1 é obviamente θ3 −ϕ1 = ψ1 , logo R2 será tal que:
~ 2 |2 = |R
~ 1 |2 + |F~3 |2 + 2 |R
~ 1 | |F~3 | cos(ψ1 )
|R
|F~3 | sen(ψ1 )
.
tan(ϕ2 ) =
~ 1 | + |F~3 | cos(ψ1 )
|R
~ 3 de R
~ 2 e F~4 ; o ângulo entre R
~ 2 e F~4 é
Temos agora de obter a resultante R
“ADT-MF” — 2005/11/7 — 8:51 — page 115 — #115
3.1. Associatividade da regra do paralelogramo
Figura 3.4: Método trigonométrico aplicado aos pares de forças aplicadas em um
ponto.
θ4 −ϕ2 −ϕ1 = ψ2 , logo:
~ 3 |2 = |R
~ 2 |2 + |F~4 |2 + 2 |R
~ 2 | |F~4 | cos(ψ2 )
|R
|F~4 | sen(ψ2 )
tan(ϕ3 ) =
.
~ 2 | + |F~4 | cos(ψ2 )
|R
~ 3 e F~5 , que pode ser calculada de modo
Resta apenas compor a resultante R
análogo. Como se vê, esse processo é muito trabalhoso quando envolve muitas
forças e não será usado para esses casos.
3.1.5
Método analítico
O método analítico é o mais usado e se presta melhor a generalizações. Consiste em projetarmos as forças sobre os (ou decompormos as forças nas direções dos) eixos coordenados, em geral eixos cartesianos (retilíneos) ortogonais, e somarmos as componentes homólogas sobre cada eixo, obtendo-se assim as respectivas componentes da resultante. Entretanto, antes de abordarmos
o problema, vamos recordar algumas noções básicas. Veja Fig. 3.5. Uma força
de 30 gf está aplicada no ponto P1 de coordenadas (2, 2) e faz um ângulo θ1
com o eixo Ox. Observe que esse ângulo tem um sinal positivo de acordo com
a convenção de atribuir sinal positivo ao ângulo de que é preciso fazer girar o
eixo Ox no sentido contrário ao dos ponteiros de um relógio colocado sobre
o plano xOy para levá-lo a coincidir com a direção paralela a de F~1 ; sentido
a favor do movimento dos ponteiros do relógio é considerado negativo. Deste
modo, o ângulo θ1 entre o eixo dos x e a força F~1 é o ângulo indicado na Fig. 3.5, será positivo. Consideremos várias forças F~2 , F~3 , F~4 e F~5 , veja Fig. 3.6,
os ângulos que o eixo dos x forma com essas forças são os ângulos positivos
indicados na Fig. 3.6, respectivamente por θ2 , θ3 , θ4 e θ5 . Para determinamos
115
“ADT-MF” — 2005/11/7 — 8:51 — page 116 — #116
116
Capítulo 3. Grandezas Vetoriais
Figura 3.5: Convenções para orientação de ângulos no método analítico.
Figura 3.6: Forças aplicadas nos quadrantes.
esses ângulos, traçamos pelo ponto de aplicação das forças uma paralela ao
eixo Ox e de mesmo sentido que o desse eixo, os ângulos entre essa paralela
e a direção das forças e são os ângulos procurados, todos positivos. Na Fig. 3.6 se vê forças aplicadas em pontos nos primeiro, segundo, terceiro e quarto
quadrantes e os ângulos que o eixo Ox forma com essas forças. Note-se que os
ângulos θ6 e θ7 são negativos. 1
Vejamos agora as (forças) componentes das forças segundo os eixos coordenados (Ox e Oy). O problema é o mesmo que já abordamos no caso de duas
forças. Para fixar idéias, vamos considerar apenas quatro forças coplanares F~1 ,
F~2 , F~3 e F~4 aplicadas em um ponto P1 (no plano xOy). Como o sistema de coordenadas é arbitrário, poderíamos tomar o ponto P1 para origem do sistema de
coordenadas e a direção da força F~1 (por exemplo) como a do eixo dos x, isso
simplificaria os cálculos; entretanto, para generalidade, vamos tomar a origem
do sistema de coordenadas não coincidente com o ponto P1 . Veja Fig. 3.7. Os
ângulos são respectivamente: θ1 , θ2 , θ3 e θ2 , todos positivos, de acordo com
a convenção; as projeções das forças em relação são indicadas pelos índices 1,
2, 3 e 4, seguidos das letras x ou y se a componente se refere ao eixo x ou y.
Assim temos:
F1x
F2x
F3x
F4x
= |F~1 | cos(θ1 )
= |F~2 | cos(θ2 )
= |F~3 | cos(θ3 )
= |F~4 | cos(θ4 )
e
F1y
F2y
F3y
F4y
= |F~1 | sen(θ1 )
= |F~2 | sen(θ2 )
= |F~3 | sen(θ3 )
= |F~4 | sen(θ4 ) .
1
O estudante deve recordar agora o sinal das funções trigonométricas para os ângulos
nos diferentes quadrantes.
“ADT-MF” — 2005/11/7 — 8:51 — page 117 — #117
3.1. Associatividade da regra do paralelogramo
~ x uma força igual a uma unidade de força paralela
Ou ainda, denotando por U
Figura 3.7: Forças coplanares aplicadas no ponto (a, b) (ver Fig. 3.8).
Figura 3.8: Resultante das forças correspondentes à Fig. 3.7.
~ y uma força igual a uma
ao eixo Ox e com mesmo sentido desse eixo, e por U
unidade de força paralela ao eixo Oy e com mesmo sentido desse eixo, então
~ x |)U
~ x e ûy = (1/|U
~ y |)U
~ y , podemos
podemos considerar as grandezas û x = (1/|U
expressar as força componentes de uma força paralelas aos eixos coordenados,
isto é:
F~1x = |F~1 | cos(θ1 ) û x = F1x û x
F~1y = |F~1 | sen(θ1 ) ûy = F1y ûy
F~2x = |F~2 | cos(θ2 ) û x = F2x û x
F~2y = |F~2 | sen(θ2 ) ûy = F2y ûy
e
F~3x = |F~3 | cos(θ3 ) û x = F3x û x
F~3y = |F~3 | sen(θ3 ) ûy = F3y ûy
F~ = |F~ | cos(θ ) û = F û
F~ = |F~ | sen(θ ) û = F û .
4x
4
4
4x x
4y
4
4
4y y
x
y
~ terá componentes R
~x e R
~ y , ou projeções R x e Ry , que são iguais
A resultante R
117
“ADT-MF” — 2005/11/7 — 8:51 — page 118 — #118
118
Capítulo 3. Grandezas Vetoriais
às somas das componentes, ou das projeções, homólogas, das forças F~i , i ∈
{1, 2, 3, 4}, isto é, o índice i varia de 1 a 4 no símbolo F~i . Desse modo se tem:
~ x = F~1x + F~2x + F~3x + F~4x
R x = F1x + F2x + F3x + F4x
R
ou
Ry = F1y + F2y + F3y + F4y
R
~ y = F~1y + F~2y + F~3y + F~4y
~ x e R x , aquela resObserve-se que sempre se deve distinguir as grandezas R
~
ponde pela componente da força R na direção Ox e esta pela projeção dessa
força nesta direção. Escrevendo-se um dos sistemas de relações, deve-se ter
sempre em mente o outro; para não ficar com uma notação muito carregada,
passaremos a indicar as relações envolvendo as projeções, mas o estudante
deve ter sempre em mente que a força que se está indicando é a soma das
forças componentes correspondentes. De um modo simbólico podemos representar as somas com o sinal de somatório:
Rx =
4
X
Fix
e
Ry =
i=1
4
X
Fiy .
i=1
Ou ainda, escrevendo as projeções em função dos cossenos e dos senos dos
ângulos:
Rx =
4
X
|F~i | cos(θi )
e
Ry =
i=1
4
X
|F~i | sen(θi ) .
(3.1)
i=1
É claro que, sendo os eixos ortogonais, então: 2
~ 2 = R2x + R2y
|R|
e
tan(φ) =
Ry
,
Rx
~
em que φ é o ângulo entre o eixo Ox e a resultante R.
~
Substituindo as projeções de R pelas expressões dadas pelas relações (3.1),
temos:
4
2 4
2
X
X
~ 2 = |F~i | cos(θi ) + |F~i | sen(θi ) ,
|
R|
i=1
i=1
4
X
|F~i | cos(θi )
.
tan(φ) = i=1
4
X
|F~i | sen(θi )
i=1
2
u
Tendo-se z = tan(λ), tira-se λ = arctan(z).
“ADT-MF” — 2005/11/7 — 8:51 — page 119 — #119
119
3.2. Grandezas vetoriais
Problemas
Problema 3.1. Três forças F~1 , F~2 e F~3 estão aplicadas em um ponto P. Suas
intensidades são respectivamente 3 gf, 4 gf e 5 gf. F~2 forma com F~1 um ângulo
de 30◦ , e F~3 forma com F~2 um ângulo de 90◦ .
Determinar a resultante pelos três métodos. No método analítico tomar
um sistema de eixos em que F~1 faça um ângulo de 30◦ com o eixo Ox.
Problema 3.2. Demonstre a expressão analítica da regra do paralelogramo
para n forças:
n
n
X
X
Rx =
Fix e Ry =
Fiy .
i=1
i=1
Faça n = 3, e aplique a regra do polígono; projete as forças sobre os eixos
coordenados e também indique as componentes de cada força nas direções
dos eixos coordenados.
Problema 3.3. Cinco forças coplanares estão aplicadas em um ponto P: F~1 ,
F~2 , F~3 , F~4 e F~5 . As intensidades das primeiras são respectivamente 10, 20,
15 e 10 gf. F~2 forma com F~1 um ângulo de 30◦ , F~3 forma com F~2 um ângulo
de 90◦ , F~4 forma com F~3 um ângulo de 120◦ . Os ângulos têm os sentidos
trigonométricos, isto é, o sentido contrário ao do movimento dos ponteiros
de um relógio colocado sobre o plano. O ponto P está em equilíbrio, pede-se
determinar F~5 . Use os métodos gráfico e analítico.
Problema 3.4. Use os três dinamômetros e um peso de 2 gf, monte um dispositivo como o da Fig. 3.1, determine pelos métodos gráfico e analítico a
resultante das forças com os dinamômetros e compare com a força peso que
as equilibra.
3.2
Grandezas vetoriais
Uma força é uma grandeza orientada e como tal representável por um segmento de reta orientado (que se compõe segundo a regra do paralelogramo).
Se considerarmos o conjunto de todas as forças que se podem aplicar em um
ponto, veremos que esse conjunto de forças, combinadas (compostas) pela regra do paralelogramo, forma o que se denomina em matemática um grupo comutativo ou abeliano. De um modo geral, uma grandeza física orientada que
se compõe pela regra do paralelogramo gozará assim de todas as propriedades
“ADT-MF” — 2005/11/7 — 8:51 — page 120 — #120
120
Capítulo 3. Grandezas Vetoriais
formais da adição de números (reais ou complexos). Desse modo, a composição pela regra do paralelogramo também é usualmente representada pelo sinal
de adição +. Uma tal grandeza se denomina grandeza física vetorial, ou simplesmente grandeza vetorial.
Observe-se que uma grandeza orientada ao combinar-se pode não o fazer pela regra do paralelogramo, isto é, essa “composição” pode não gozar da
propriedade comutativa, neste caso tais grandezas não são consideradas grandezas físicas vetoriais. Como exemplo, podemos citar as rotações finitas. Uma
rotação finita θ̆1 , em torno de um eixo, combinada com outra θ̆2 , em torno
de um outro eixo paralelo ao primeiro, não goza da propriedade comutativa:
θ̆1 ⊕ θ̆2 , θ̆2 ⊕ θ̆1 , tendo-se representado pelo sinal ⊕ a combinação das duas
rotações. 3 De fato, dado um ponto P do plano ortogonal aos dois eixos, ao
submetermos P às duas rotações, primeiro θ̆1 e depois θ̆2 , ele irá parar em posição diferente da obtida quando se muda a ordem das rotações, aplicando-se
primeiro θ̆2 e em seguida θ̆1 . Veja Fig. 3.9, em que se fez θ1 = 90◦ e θ2 = 180◦ .
Figura 3.9: Composição de rotações; em (a) o ponto P1 girou por θ̆1 para P2 ,
em seguida por θ̆2 foi para P3 ; em (b) o ponto P1 girou primeiro por θ̆2 para
P02 , em seguida por θ̆1 foi para P03 . Vê-se que P3 . P03 .
Problema 3.5. Mencione duas operações elementares não-comutativas.
3
u A uma rotação de um ângulo θ em torno de uma reta sempre se pode associar uma
direção, a dessa reta; como a rotação em torno dessa reta pode ocorrer em um de dois sentidos,
pode-se associar a essa rotação um eixo de rotação. Portanto, ao ângulo θ e a esse eixo se
pode associar um segmento de reta orientada, de comprimento proporcional ao ângulo e com o
sentido do eixo.
Note-se que no exemplo da Fig. 3.9 foram compostos “dois segmentos” paralelos, e essa
composição não goza da propriedade comutativa; diferentemente do que ocorreu quando se
calibraram os dinamômetros, lembre-se que para obter o peso de 15 gf compusemos duas forças
pesos (verticais para baixo) de 10 gf e de 5 gf, a ordem com que se “montou” esses peso é
irrelevante para o resultado do peso de 15 gf.
“ADT-MF” — 2005/11/7 — 8:51 — page 121 — #121
3.3. As Leis de Newton
3.3
As Leis de Newton
Em 1686 Sir Isaac Newton (1642–1727) apresentou à Sociedade Real de Londres o seu livro Philosophiæ Naturalis Principia Mathematica que publicou 4
em 1687. Nesse livro Newton procurou sintetizar todo o conhecimento de seu
tempo relativamente à Mecânica. Inicia o livro com uma série de definições a
que se seguem três postulados que são conhecidos como as leis de Newton.
1a Lei Todo corpo permanece em seu estado de repouso ou de movimento
retilíneo e uniforme, a não ser que seja compelido por forças externas a
mudar esse estado.
2a Lei A mudança do momentum linear é proporcional à força e se efetua na
direção da linha reta segundo a qual age a força.
3a Lei A toda ação há sempre uma reação igual e contrária; ou as ações
mútuas de dois corpos são sempre iguais e diretamente opostas.
Observe-se que a primeira lei, também chamada de lei da inércia, se deve a
Galileu. A segunda lei já era conhecida de Galileu que não tinha tido porém
idéia muito clara da massa de um corpo. A terceira lei se deve a Newton. Vamos
enunciar a primeira lei de Newton de modo que seja mais fácil aplicá-la nos
problemas:
1a Lei de Newton – (segundo enunciado)
Se um corpo está em repouso ou em movimento retilíneo e uniforme,
então a resultante das forças aplicadas ao corpo é nula.
Observações
1a – Para abreviar a linguagem se diz que um corpo está em equilíbrio se ele
está em repouso ou em movimento retilíneo e uniforme.
2a – No segundo enunciado apresentado para a primeira lei de Newton, diz-se
~ das
de antemão que o corpo está em equilíbrio e que nesse caso a resultante R
forças externas aplicadas a ele é nula, como é óbvio o enunciado não contém a
recíproca que pode ser falsa, isto é, “a resultante das forças externas aplicadas
~ = 0, e o corpo não estar em equilíbrio, tendendo a
a um corpo pode ser nula, |R|
girar em torno de um eixo que passa pelo seu centro de massa, com movimento
de rotação acelerado”. Veremos tal fato mais tarde.
4
u
Publicação original em latim. Há tradução recente (1990) para o português [22].
121
“ADT-MF” — 2005/11/7 — 8:51 — page 122 — #122
122
Capítulo 3. Grandezas Vetoriais
2a Lei de Newton A segunda lei de Newton será estudada mais tarde quando
tratarmos da Dinâmica (pág. 361).
Terceira lei de Newton
Vamos enunciar a terceira lei de Newton ressaltando certos aspectos que omitidos podem levar a erros graves de interpretação.
3a Lei de Newton – (segundo enunciado)
~ o corpo B reage
Se um corpo A atua sobre um corpo B com uma força F,
0
sempre com uma força F~ sobre o corpo A, de tal modo que a força F~ 0
sobre A é de mesma direção, mesma intensidade que F~ mas de sentido
contrário. (Veja Fig. 3.10.)
~ força de ação de A sobre B; F~ 0 : força de reação de B sobre A. Em
Figura 3.10: F:
(a) se tem uma repulsão, os corpos tendem a se separar; em (b) se tem uma atração,
os corpos tendem a se juntar.
Ação e reação sempre (ocorrem) surgem juntas, em pares, sejam quais forem
as condições físicas que as provocam: atração gravífica, repulsão ou atração
elétrica ou magnética, choque mecânico, atrito; no caso porém de interação
eletromagnética de duas partículas carregadas eletricamente e em movimento
relativo, as forças não terão a mesma reta suporte, mas serão paralelas, tendo
sempre a mesma intensidade e sentidos contrários. No Universo as forças de
interação entre os corpos surgem sempre aos pares, com a mesma intensidade
e sentidos contrários e mesma direção.
Primeira e Terceira leis de Newton Deve-se tomar cuidado para não fazer
confusão na aplicação da 1a e 2a leis de Newton com a 3a lei. Senão vejamos;
suponhamos um homem que deseja levar um carrinho de mão de um ponto P1
para outro P2 , veja Fig. 3.11. Ele está em pé, segurando o carrinho, que inicialmente está em repouso, e o empurra com uma força horizontal F~ na direção
desejada; ora, pela terceira lei de Newton, o carrinho reage com uma força
F~ 0 , de mesma intensidade e direção, mas de sentido contrário, sendo assim,
F~ + F~ 0 = ~0, onde ~0 é a força tal que |~0| = 0. Como o carrinho está inicialmente
“ADT-MF” — 2005/11/7 — 8:51 — page 123 — #123
3.3. As Leis de Newton
Figura 3.11: Em (a): o homem empurra o carrinho; em (b): as forças sobre o homem
e as forças sobre o carrinho.
em repouso, e como a resultante das forças aplicadas é nula, então, como diz
a 1a lei de Newton, ele continuaria em repouso, não conseguiria sair do lugar
por mais que o homem se esforçasse. Tal fato não é verdadeiro, pois o homem
leva-o para onde quiser.
Tente o estudante explicar essa conclusão aparentemente paradoxal, para
ver se percebeu bem o significado e conceitos das leis de Newton. Observese que a 1a lei de Newton, conforme enunciada, se refere a um corpo, para
o estudo do movimento desse corpo deve-se saber quais as forças que atuam
sobre esse corpo e só sobre ele, as forças que atuam em outros corpos não
podem ser consideradas; se quisermos saber qual o movimento do corpo A,
por exemplo, temos que saber quais as forças que atuam no corpo A e então
obter a resultante dessas forças. Deve-se isolar (intelectualmente) o corpo A
do restante do Universo e examinar quais as forças que o restante do Universo
aplica sobre o corpo A. As reações de A sobre os outros corpos não atuam
sobre A, portanto não podem ser somadas às forças que atuam sobre A.
Observação O estudo feito no Cap. 2 teve por finalidade precípua introduzir o conceito de grandeza vetorial por meio do estudo das forças do ponto
de vista da Estática. Os Posts. 1 e 2 (pág. 86 e pág. 89) foram enunciados para
que o estudante pudesse meditar sobre o fato de que experiências, de um modo
geral e como as programadas aqui, não demonstram as leis enunciadas, apenas as verificam dentro de um erro que, embora pequeno, não permite obter
as igualdades das relações enunciadas; além disso, teve a finalidade de dar
fundamento teórico para que o estudante pudesse realizar experiências e assim desenvolver habilidades específicas, vencendo dificuldades que não são
intransponíveis, dando-lhe confiança e preparando-o para experiências mais e
mais difíceis.
123
“ADT-MF” — 2005/11/7 — 8:51 — page 124 — #124
124
Capítulo 3. Grandezas Vetoriais
Os postulados referentes à regra do paralelogramo, i.e., Posts. 3 e 4, estabelecem a existência de grandezas orientadas que se combinam por operação
que vai formar um grupo abeliano. Tais grandezas são numerosas em Física:
o momento de uma força em relação a um eixo, o deslocamento no espaço
físico; a velocidade, a aceleração e o momentum linear de um ponto material
(em relação a determinado referencial) são algumas das grandezas vetoriais
que encontraremos em breve. Por outro lado, as leis de Newton se referem a
fenômenos que ocorrem na Natureza, em particular a segunda lei relaciona a
grandeza vetorial força com a grandeza vetorial aceleração de uma partícula
de massa m, escalar que aparece como um coeficiente de proporcionalidade e
que mede uma propriedade da partícula, denominada inércia.
Ora, o conceito de grandeza vetorial poderia ser introduzida pelo estudo
do deslocamento de um ponto, e em seguida estudando-se a velocidade e a
aceleração, para depois se estabelecerem as leis de Newton. Afigurou-se-nos,
entretanto, que do ponto de vista da aprendizagem, esse caminho é muito mais
difícil, levando o estudante a erros conceituais, além de colocá-lo diante de experiências muito mais elaboradas, o que muitas vezes o faz perder a confiança
em si, afastando-o da Física Experimental.
3.4
Alguns conceitos de Matemática
3.4.1
Noção de grupo matemático
Sistema algébrico é um conjunto C de elementos a, b, c, . . . associados por
operações Ω1 , Ω2 , . . . .
Um dos sistemas algébricos mais simples é o denominado grupo, que passamos a definir.
Grupo é um sistema algébrico constituído por um conjunto C de elementos
combinados por uma operação Ω e que satisfaz as seguintes condições:
1o ) Dado o par a, b de elementos de C, combinando-se a e b pela operação Ω, obtemos um elemento c de C. Diz-se neste caso que o sistema
algébrico (grupo) é fechado ou estável em relação à operação Ω.
2o ) A operação Ω é associativa, isto é: (a Ω b) Ω c = a Ω (b Ω c), em que a,
b, c são elementos de C.
3o ) Existe em C um elemento denominado identidade ou elemento neutro e,
tal que a Ω e = e Ω a = a para todo a pertencente a C.
“ADT-MF” — 2005/11/7 — 8:51 — page 125 — #125
3.4. Alguns conceitos de Matemática
4o ) Dado um elemento a de C, existe em C um elemento a0 que se denomina
inverso (ou simétrico) de a, tal que a Ω a0 = a0 Ω a = e .
5o ) Se, dados a e b quaisquer de C, se tem a Ω b = b Ω a, o grupo se denomina comutativo ou abeliano.
Problemas
Problema 3.6. Dê exemplos de grupos formados com conjuntos de números e
que a operação é a operação de adição +, ou a operação de multiplicação ×
de números.
Problema 3.7. Prove que o conjunto dos números reais munido da operação
de subtração forma um grupo não-comutativo ou não-abeliano.
Problema 3.8. Prove que o conjunto de forças que se pode aplicar em um
ponto P, associadas pela operação Θ definida pela regra do paralelogramo,
forma um grupo abeliano.
De fato, já vimos que Θ (Probl. 3.8) goza da propriedade associativa e comutativa. Além disso, o conjunto é fechado em relação à operação Θ, pois a
composição de duas forças F~1 e F~2 quaisquer aplicadas em P é também uma
~ aplicada em P e, portanto, pertence ao conjunto. Vejamos o elemento
força R
neutro, o qual também é chamado elemento identidade, de que trata especificamente a primeira lei de Newton; sejam duas forças F~1 e F~2 que fazem entre
~ tem intensidade |R|
~ que é tal que:
si um ângulo θ, a resultante R
~ 2 = |F~1 |2 + |F~2 |2 + 2 |F~1 | |F~2 | cos(θ) e 0 ≤ θ ≤ 180◦ ,
|R|
veja Fig. 3.12. Se o ângulo θ tende para 180◦ , então, pela expressão da intensi-
~ → |F~ 0 |.
Figura 3.12: Observe a situação limite para θ → π rad e |F|
dade da resultante, vê-se que essa intensidade tende um valor mínimo que será
o valor numérico da diferença das intensidades das forças F~1 e F~2 :
q
|F~2 | − |F~1 | = |F~1 |2 + |F~1 |2 − 2 |F~2 | |F~1 | ,
125
“ADT-MF” — 2005/11/7 — 8:51 — page 126 — #126
126
Capítulo 3. Grandezas Vetoriais
~ tende para zero (0). Neste
se, além disso, |F~1 | → |F~2 |, então a intensidade de R
~ será uma força de intensidade nula aplicada no ponto P, observe-se que
caso R
a direção dessa força nula é indeterminada, tendo em vista que sua direção
independerá da direção de F~1 ou de F~2 . Para exprimir esse resultado, pode-se
escrever:
~ = ~0 .
F~1 + F~2 = R
Em que por ~0 se indica uma força de intensidade nula e direção indeterminada,
que se usa chamar de força nula. Como se pode ver, ~0 goza da propriedade:
F~ + ~0 = ~0 + F~ = F~ ,
qualquer que seja F~ aplicada em P ,
sendo assim o elemento neutro da composição de forças, portanto, a toda força
F~ aplicada em P se pode superpor a força nula sem que se alterem os efeitos
por F~ causados. Por outro lado, dada uma força F~ qualquer aplicada em P, é
~ isto é, tal que
sempre possível aplicar em P outra força F~ 0 que equilibre F,
F~ + F~ 0 = F~ 0 + F~ = ~0 ,
~ Fica assim provado que o conjunto das forsendo F~ 0 , portanto, o inverso de F.
ças aplicáveis num ponto P, combinadas pela regra do paralelogramo, forma
um grupo abeliano.
3.5
Espaço vetorial
É claro que o simples fato de as forças aplicáveis em um ponto P formarem
um grupo abeliano não basta para que realizemos todas as operações possíveis
com as forças. Assim, por exemplo, é possível definir uma força quatro (4)
vezes maior que outra? Além disso, se uma força F~ é a soma de duas outras, ao
~ pode-se considerá-la como a soma
se definir outra 4 vezes mais intensa que F,
das componentes de F~ multiplicadas por 4? Examinemos esse fato. Sejam duas
~ = F~1 + F~2 . Quando se diz
forças F~1 e F~2 aplicadas em P e de resultante R
que uma força é quatro vezes maior que outra, significa que sua intensidade
é 4 vezes maior, portanto seu segmento orientado representativo será 4 vezes
~ significará uma força de mesma direção e sentido que
maior e o símbolo 4R
~ mas de intensidade 4 vezes maior. Sendo assim, ver Fig. 3.13, 4R
~ = 4F~1 +
R
~
~
4F2 , pois se multiplicarmos os segmentos representativos de F1 e de F~2 por
4 (ou por um número real positivo qualquer χ) obteremos um paralelogramo
“ADT-MF” — 2005/11/7 — 8:51 — page 127 — #127
127
3.5. Espaço vetorial
~
4R
4F~2
F~2
P
~
R
F~1
4F~1
Figura 3.13: Multiplicação de força por um número real.
~ tendo em vista que seria o
semelhante ao primeiro cuja diagonal será |4R|,
mesmo paralelogramo que representaria as forças em outra escala.
O que significaria, porém, multiplicar uma força por um número (real)
negativo? Já vimos que F~ + F~ 0 = ~0 significa que F~ 0 tem a mesma intensidade
e direção de F~ mas sentido contrário, será lícito e oportuno que se escreva
F~ 0 = −F~ + ~0, e tendo em vista que −F~ + ~0 = ~0+(−F~ ) = −F~ , então F~ 0 = −F~ , o
sinal negativo significando que a força tem sentido contrário ao de F~ , mesma
direção e mesma intensidade. Podemos também definir −1 F~ = −F~ , e, portanto,
−2 F~ = 2(−F~ ), o que significa uma força de intensidade 2 vezes maior que a de
~ com mesma direção e sentido de (−F~ ). Portanto, multiplicar uma força F~
−F,
por um número negativo −|χ| significa obter uma força de intensidade |χ| vezes
maior e de mesma direção mas de sentido contrário que as da força F~ .
3.5.1
Diferença vetorial entre duas forças
Já vimos que as forças aplicadas em um ponto formam um grupo, portanto
que toda força F~ aplicada em P tem no conjunto de forças aplicáveis nesse
ponto o seu elemento inverso F~ 0 tal que F~ + F~ 0 = F~ 0 + F~ = ~0, e F~ 0 = −F~ . Sendo
assim, podemos compor uma dada força F~1 com o inverso de outra: F~1 +(−F~ ),
em que o sinal + significa a adição vetorial e o sinal − significa a operação
de inverter o sentido de F~ , ora, podemos combinar os dois símbolos + e −
pela regra do sinal no corpo dos números reais, fazendo-o igual ao símbolo
−, e assim F~1 +(−F~ ) = F~1 − F~ . Observe-se que agora esse sinal negativo tem
~ e somar (compor) pela regra do
o duplo significado: inverter o sentido de F,
paralelogramo a força (−F~ ) obtida de F~1 . Deste modo, fica perfeitamente bem
definida a multiplicação de uma força por um número real a ou b qualquer, e
que essa multiplicação goza das seguintes propriedades:
“ADT-MF” — 2005/11/7 — 8:51 — page 128 — #128
128
Capítulo 3. Grandezas Vetoriais
a F~1 + F~2 = a F~1 + a F~2
(a + b) F~ = a F~ + b F~
(a b) F~ = a bF~
(3.2b)
1 F~ = F~ .
(3.2d)
(3.2a)
(3.2c)
Podemos agora definir espaço vetorial em um ponto; observe-se que a operação definida pela regra do paralelogramo goza de todas as propriedades formais da adição de números reais, por isso o grupo assim definido se denomina
grupo aditivo. De modo geral: 5
Seja R o corpo dos números reais e V um grupo abeliano aditivo
tal que haja uma multiplicação que associa um elemento a de R
e um elemento F~ de V ao elemento aF~ de V. Então V é denominado de espaço vetorial sobre R, desde que a multiplicação por
escalar satisfaça as quatro propriedades em (3.2), em que a, b ∈ R
~ F~1 , F~2 ∈ V.
e F,
Os elementos de um corpo, como o dos reais, são chamados escalares.
Com relação às relações em (3.2):
. a propriedade (3.2a) se denomina distributividade da multiplicação por
escalar em relação à operação de adição em V;
. a propriedade (3.2b) se denomina distributividade da multiplicação escalar em relação a operação de adição sobre V, e
. a propriedade (3.2c) se denomina associatividade da multiplicação escalar em relação a multiplicação em R.
Problemas
Problema 3.9. Dadas duas forças F~1 e F~2 aplicadas em um ponto P e que
~ = F~2 − F~1 .
fazem entre si um ângulo θ, determine graficamente D
Õ̧. Trace os segmentos representativos de F~1 e de F~2 (veja Fig. 3.14); determine o segmento representativo de −F~1 e aplique a regra do paralelogramo para somar (compor) as forças (F~2 ) e (−F~1 ). Observe que se obtém a
5
u De modo mais geral, é possível definir espaço vetorial sobre um corpo qualquer. Note
se ainda que não há necessidade de esse espaço ser um espaço normado, i.e., que se tenha uma
definição de norma ou módulo.
“ADT-MF” — 2005/11/7 — 8:51 — page 129 — #129
129
3.5. Espaço vetorial
Figura 3.14: Ilustração para o Probl. 3.9.
diagonal do paralelogramo da soma F~1 + F~2 que liga a extremidade de F~1 com
~ com base nesse resultado,
a extremidade de F~2 . Por quê? Veja que F~2 = F~1 +D,
defina a diferença F~2 − F~1 .
Problema 3.10. Considere um sistema Oxy ortogonal cartesiano no plano e
os segmentos de reta orientados com origem em O e extremidade no ponto de
coordenadas (x, y). Mostre que o conjunto desses segmentos orientados OP,
sendo P um ponto genérico do espaço, forma um grupo aditivo V em que a
operação de adição é a regra do paralelogramo. Mostre que V sobre R forma
um espaço vetorial. Os elementos desse espaço V são chamados vetores posição ou raios vetores dos pontos do plano, que estão intimamente relacionados
com as coordenadas dos pontos desse plano associadas a um sistema cartesiano de coordenadas para esse plano, determine essa relação.
Problema 3.11. Tome um sistema cartesiano triortogonal Oxyz:
a) defina o espaço vetorial localizado em O por meio dos segmentos orien−−→
tados OP, onde P é um ponto genérico do espaço euclidiano tridimensional;
−−→
b) exprima o vetor OP em função de suas coordenadas cartesianas;
c) calcule a distância entre dois pontos, P1 e P2 , do espaço euclidiano
em função de suas coordenadas cartesianas, com auxílio das noções já
aprendidas.
Problema 3.12. Demonstre que o conjunto dos números inteiros pares P, associados pela adição +, forma um grupo aditivo abeliano hP, +i, onde
P = 0, ±2, ±4 . . . ± n, ±(n+1) . . . , e onde n ∈ N .
Dê três motivos pelos quais este conjunto P, com elementos associados pela
multiplicação, não constitui um grupo.
“ADT-MF” — 2005/11/7 — 8:51 — page 130 — #130
130
Capítulo 3. Grandezas Vetoriais
Õ̧. Basta verificar que a soma de dois inteiros pares é um inteiro
par, isto é, o conjunto é fechado; que a adição goza da propriedade associativa;
que existe o elemento neutro, que é o zero (0); e que a operação + é comutativa.
Problema 3.13. Mostre que o conjunto Q dos números racionais forma um
grupo aditivo abeliano quando se combinam seus elementos por meio da operação de adição +.
Problema 3.14. Prove que o conjunto Q dos números racionais forma um
grupo abeliano quando se combinam seus elementos por meio da operação de
multiplicação ×, excluindo-se o zero (0). Por que se deve excluir o zero?
Õ̧.
De fato, o conjunto Q − {0} é fechado em relação à multiplicação, isto é, dados dois racionais quaisquer, a e b, o seu produto a × b é
um racional; dado um racional a , 0, existe sempre um racional a0 tal que
a×a0 = a0 ×a = 1, onde 1 é o elemento neutro e a0 é o inverso multiplicativo de
a; além disso, a multiplicação de racionais é comutativa e associativa. O zero
(0) deve ser excluído porque não possui inverso multiplicativo.
Corpo
Há um importante conceito matemático que sintetiza as propriedades algébricas no conjunto dos reais (além dos racionais e dos complexos, por exemplo),
é o conceito de corpo, cujos axiomas que o definem expomos a seguir.
Seja um conjunto K não vazio de elementos a, b, c, etc. e duas operações
que se representam por + (adição) e por × (multiplicação). Diz-se que o conjunto K forma um corpo sob essas duas operações, e se denota hK, +, ×i, se:
a) O conjunto K forma um grupo aditivo abeliano sob a operação de adição; isto é,
a.1) a adição é fechada em K:
a + b ∈ K ∀a, b, ∈ K ;
a.2) a adição em K é associativa:
(a+b)+c = a+(b+c) ∀a, b, c ∈ K ;
a.3) existe 0 ∈ K tal que a + 0 = 0 + a = a ∀a ∈ K (denota-se por 0,
numeral zero, o elemento neutro da adição);
a.4) dado qualquer a ∈ K, existe ā ∈ K tal que a+ā = ā+a = 0 (denota-se
por −a, tal que ā = −a, o elemento simétrico de a pela adição);
a.5) a adição em K é comutativa:
a + b = b + a ∀a, b ∈ K .
“ADT-MF” — 2005/11/7 — 8:51 — page 131 — #131
131
3.5. Espaço vetorial
b) O conjunto K− 0 forma um grupo abeliano sob a operação de multiplicação, onde o elemento 0 excluído de K é o elemento neutro da adição;
isto é:
b.1) a multiplicação é fechada em K:
a×b ∈ K ∀a, b, ∈ K;
b.2) a multiplicação em K é associativa:
c) ∀a, b, c ∈ K ;
(a × b) × c = a × (b ×
b.3) existe 1 ∈ K tal que a × 1 = 1 × a = a ∀a ∈ K; (denota-se por 1,
numeral um, o elemento neutro da multiplicação)
b.4) dado qualquer a ∈ K − {0}, existe ã ∈ K tal que a × ã = ã × a = 1;
(denota-se ã = a−1 o elemento simétrico de a pela multiplicação)
b.5) a multiplicação em K é comutativa:
a × b = b × a ∀a, b ∈ K ;
c) A operação de multiplicação goza da propriedade distributiva em relação à operação de adição: a × (b + c) = a × b + a × c ∀a, b, c ∈ K .
Observe-se o papel estratégico desempenhado pelo simétrico aditivo e pelo
inverso multiplicativo nessa grande síntese algébrica. Esses conceitos possibilitam que se trate apenas com duas operações comutativas, que no curso
primário se trata com quatro operações, duas comutativas (adição e multiplicação) e duas não-comutativas (subtração e divisão). Nesse contexto, subtrair
significa adicionar o simétrico aditivo, dividir significa multiplicar o inverso
multiplicativo.
A multiplicação é indicada alternativamente por um dos três modos:
a × b = a·b = ab .
Problema 3.15. Prove que o conjunto dos números racionais (Q) forma um
corpo sob as operações (ordinárias) de adição (+) e multiplicação ( · ), i.e.,
que hQ, +, · i é um corpo.
Õ̧. De fato, já se viu que os números racionais formam um grupo
aditivo abeliano sob a operação se adição +, e que os elementos de Q, excluindo-se o zero (elemento neutro da adição), formam um grupo comutativo sob
a operação de multiplicação ×. Deste modo, basta provar que a multiplicação
é distributiva em relação à soma, isto é, dados três números racionais r, p, q
quaisquer se tem r · (p + q) = r · p + r · q.
“ADT-MF” — 2005/11/7 — 8:51 — page 132 — #132
132
Capítulo 3. Grandezas Vetoriais
Subcorpo e extensão de corpo
Subcorpo de um corpo hK, +, · i é um subconjunto de K que constitui um corpo
sob as mesmas operações de adição e multiplicação, com a mesma unidade
multiplicativa (1) e mesmo zero aditivo (0). Analogamente, dado um corpo
hK, +, · i e dado um conjunto F que contém K (K ⊃ F), se F constitui um corpo
sob as mesmas operações de adição e multiplicação em K, então hK, +, · i se
denomina extensão de hF, +, · i. Os elementos de um corpo são chamados escalares.
Se hF, +, · i é uma extensão do corpo hK, +, · i, é fácil ver que F constitui
um espaço vetorial sobre o corpo hK, +, · i, se K é o corpo de escalares e se
definimos a adição de vetores como a adição em F e a multiplicação por escalar
como a multiplicação em F.
√
Problema 3.16. Seja o conjunto D formado por elementos d = a + b 2, tais
que a, b ∈ Q e que:
√
αd = αa + αb 2
∀α ∈ Q
√
√
√
(a1 +b1 2) + (a2 +b2 2) = (a1 +a2 ) + (b1 +b2 ) 2 .
Mostre que:
a) D, munido dessas operações, é um espaço vetorial sobre o corpo dos
racionais, e
b) D é uma extensão do corpo hQ, +, · i quando se considera a multiplicação:
√
√
√
(a1 +b1 2) · (a2 +b2 2) = (a1 a2 + 2b1 b2 ) + (a1 b2 + a2 b1 ) 2 .
Õ̧.
a) Quando se considera a extensão E de um corpo K, não se leva em conta
a operação de multiplicação definida em E, apenas em K. (Note-se que o
conjunto D constitui um espaço vetorial de dimensão
√
√3 2 sobre Q e que o
conjunto D0 formado por elementos d0 = a+b 2+c 5, com a, b, c ∈ Q,
constitui um espaço vetorial de dimensão 3 sobre o corpo dos racionais,
mas não constitui uma extensão do corpo dos racionais.)
b) Para verificar se D é uma extensão do corpo dos racionais, verifique que
o inverso multiplicativo de
√
√ 1
d = a + b 2 é d−1 = 2
−a
+
b
2 ;
2b − a2
“ADT-MF” — 2005/11/7 — 8:51 — page 133 — #133
133
3.5. Espaço vetorial
todo elemento do conjunto D possui inverso multiplicativo?
Problema 3.17. O conjunto M2 = {0, 1} cujos elementos são associados pela
soma ⊕ e pela multiplicação , de acordo com as respectivas tábuas de adição
e de multiplicação da Tab. 3.1, forma o corpo hM2 , ⊕, i. Prove.
Tabela 3.1: Tabuadas para o corpo h{0, 1}, ⊕, i.
⊕
0
1
0
0
1
1
1
0
0
1
0
0
0
1
0
1
Note-se que o corpo hM2 , ⊕, i contém apenas os elementos neutros, constituindo portanto o corpo com menor número de elementos.
Problema 3.18. Como se viu no Probl. 3.12, o conjunto dos números inteiros
pares forma um grupo aditivo abeliano hP, +i. Se definirmos a operação de
multiplicação dos elementos de hP, +i por escalares do corpo hM2 , ⊕, i como
a operação de multiplicação de números reais, não obteremos um espaço vetorial. Prove.
Õ̧. Veja que não é satisfeito o axioma da distributividade da multiplicação de escalar em relação a operação de adição em M2 [propriedade (II),
eq. (3.2), pág. 127], isto é, (m1 ⊕m2 )·p , m1 p + m2 p, em que m1 , m2 ∈ M1 e p ∈ P.
De fato, se m1 = 1 e m2 = 1, então, para um número par qualquer p:
(1 ⊕ 1) · p = (0) · p = 0
(pela tabuada da multiplicação )
(1p + 1p) = 2 · p , 0
(pelas operações no corpo dos reais).
Problema 3.19. Há um teorema que diz que dado o corpo hK, +, · i, o produto
cartesiano K × K forma um espaço vetorial sobre o corpo hK, +, · i, quando
se define a multiplicação por escalar de K por k(a, b) = (k·a, k·b), em que
a, b ∈ K, · é a multiplicação em K e (a, b) ∈ K×K. Sendo assim, como hM2 , ⊕, i
é um corpo, prove que o produto cartesiano M2×M2 é um espaço vetorial sobre
o corpo hM2 , ⊕, i.
“ADT-MF” — 2005/11/7 — 8:51 — page 134 — #134
134
Capítulo 3. Grandezas Vetoriais
Observação: grandeza vetorial
Verifica-se pelos exemplos dados que as propriedades características de um
espaço vetorial são menos restritivas do que as propriedades de uma grandeza
física vetorial. Em outras palavras, um elemento de um espaço vetorial, o qual
se denomina vetor, pode não ter nenhuma das outras características da grandeza física vetorial, isto é, representável por um segmento de reta orientado e
que se combina com outro por uma operação, chamada regra do paralelogramo,
com as propriedades já vistas. Somente as propriedades algébricas formais são
comuns, a saber: o conjunto V deve formar um grupo abeliano aditivo com a
operação de adição +, correspondendo de alguma forma à operação de composição pela regra do paralelogramo, isto é, hV, +i, e tal que, dado um corpo
qualquer hK, +, · i, defini-se a multiplicação dos elementos de hV, +i por um
escalar qualquer do corpo hK, +, · i e que satisfaça os axiomas de espaço vetorial já vistos (pág. 127). Um elemento do espaço vetorial qualquer denominase vetor, o qual pode não estar associado a uma grandeza física vetorial, como
nos exemplos citados nos problemas anteriores. Toda grandeza física vetorial
é grandeza vetorial, mas nem toda grandeza vetorial é uma grandeza física
vetorial.
Ocorre ainda que em muitos livros se lê a “definição”: “vetor é um segmento de reta orientado”, neste caso a palavra vetor é empregada com significado muito restrito, o autor deseja desenvolver a álgebra elementar e o cálculo
vetoriais sem recorrer a conceitos mais sofisticados. É necessário que o estudante de física tome cuidado, pois pode ficar confuso coma as várias acepções
do termo vetor.
Entre os segmentos de reta orientados de mesma origem e as grandezas
físicas vetoriais se pode estabelecer um isomorfismo, de modo que em certas
considerações se pode representar as grandezas vetoriais pelos segmentos de
reta orientados em todas as operações algébricas que sejam necessárias no cálculo com essas grandezas da física elementar. Já não se pode dizer sempre o
mesmo dos vetores de um espaço vetorial (de dimensão infinita desprovidos
de norma, por exemplo).
Observação: espaço vetorial
É bom que fique bem claro para o estudante o conceito de espaço vetorial, por
isso vamos repetir aqui sua definição.
Seja hV, ⊕i um grupo abeliano aditivo pela operação ⊕ e hK, +, · i um corpo. O
“ADT-MF” — 2005/11/7 — 8:51 — page 135 — #135
135
3.5. Espaço vetorial
grupo hV, ⊕i constituirá um espaço vetorial sobre o corpo hK, +, · i se definirmos uma multiplicação ⊗ por escalar de hK, +, · i dos elementos de hV, ⊕i que
satisfaça os seguintes axiomas (conhecidos como axiomas de espaço vetorial):
dados k, k1 , k2 ∈ K e v, v1 , v2 ∈ V
k ⊗ (v1 ⊕ v2 ) = k⊗v1 ⊕ k⊗v2
(3.3a)
(k1 + k2 ) ⊗ v = k1 ⊗v ⊕ k2 ⊗v
(3.3b)
k1 ⊗ (k2 ⊗ v) = (k1 × k2 ) ⊗ v
(3.3c)
1⊗v=v
(3.3d)
em que 1 é o elemento neutro da multiplicação · no corpo hK, +, · i .
Observe-se que a multiplicação por escalar, indicada por ⊗ a priori nada
tem a ver com a multiplicação × no corpo. Com base nesta definição, vejamos
mais alguns exemplos.
Problema 3.20. Seja o conjunto V = {a, b, c} cujos elementos são associados
pela operação ⊕ de acordo com a tábua ⊕ da Tab. 3.2, mostre que c é o
elemento neutro da operação ⊕ e que hV, ⊕i é um grupo comutativo. Seja agora
Tabela 3.2: Tabuadas para o Probl. 3.20.
⊕
a
b
c
a
b
c
a
b
c
a
b
c
a
b
c
+
0
1
2
0
0
1
2
1
1
2
0
2
2
0
1
·
0
1
2
0
0
0
0
1
0
1
2
2
0
2
1
⊗
1
2
3
a
c
a
b
b
c
b
a
c
c
c
c
o conjunto M = {0, 1, 2} cujos elementos são associados pelas operações de
adição + e de multiplicação · de acordo com a Tab. 3.2. Mostre que hM, +, · i
é um corpo. Definindo agora a multiplicação ⊗ por escalar de hM, +, · i dos
elementos de V pela tábua de multiplicação ⊗ da Tab. 3.2, prove que hV, ⊕i é
um espaço vetorial sobre o corpo hM, +, · i.
Õ̧.
De fato, com base nas tabuadas da Tab. 3.2 podemos escrever:
(I) 0 ⊗ (a ⊕ b) = 0⊗a ⊕ 0⊗b ⇒ 0 ⊗ c = c ⊕ c ⇒ c = c ,
1 ⊗ (a ⊕ b) = 1⊗a ⊕ 1⊗b ⇒ 1 ⊗ c = a ⊕ b ⇒ c = c ,
2 ⊗ (a ⊕ b) = 2⊗a ⊕ 2⊗b ⇒ 2 ⊗ c = b ⊕ a ⇒ c = c etc.
(II) (0 + 1) ⊗ a = 0⊗a ⊕ 1⊗a ⇒ 1 ⊗ a = c ⊕ a ⇒ a = a ,
(1 + 2) ⊗ a = 1⊗a ⊕ 2⊗a ⇒ 0 ⊗ a = a ⊕ b ⇒ c = c etc.
“ADT-MF” — 2005/11/7 — 8:51 — page 136 — #136
136
Capítulo 3. Grandezas Vetoriais
(III) 1 ⊗ (2 ⊗ a) = (1 · 2) ⊗ a ⇒ 1 ⊗ b = 2 ⊗ a ⇒ b = b ,
2 ⊗ (2 ⊗ a) = (2 · 2) ⊗ a ⇒ 2 ⊗ b = 1 ⊗ a ⇒ a = a etc.
(IV) 1 ⊗ a = a
trivial.
Tabela 3.3: Tabuadas para o Probl. 3.21.
⊕
a
b
c
d
e
f
a
b
c
d
e
f
a
b
c
d
e
f
a
b
c
d
e
f
a
b
c
d
e
f
a
b
c
d
e
f
a
b
c
d
e
f
a
b
c
d
e
f
+
0
1
2
3
4
5
0
0
1
2
3
4
5
1
1
2
3
4
5
0
2
2
3
4
5
0
1
3
3
4
5
0
1
2
4
4
5
0
1
2
3
5
5
0
1
2
3
4
⊗
0
1
2
3
4
5
a
f
a
b
c
d
e
b
f
b
d
f
b
d
c
f
c
f
c
f
c
d
f
d
b
f
d
b
e
f
e
d
c
b
a
f
f
f
f
f
f
f
×
0
1
2
3
4
5
0
0
0
0
0
0
0
1
0
1
2
3
4
5
2
0
2
4
0
2
4
3
0
3
0
3
0
3
4
0
4
2
0
4
4
5
0
5
4
3
2
1
Problema 3.21. Seja o conjunto A = {a, b, c, d, e, f } cujos elementos são combinados pela operação ⊕ de acordo com a Tab. 3.3. Como se vê, f é o elemento
neutro da operação ⊕, assim A forma um grupo abeliano aditivo. Prove. Seja
ainda o corpo formado pelo conjunto C = {0, 1, 2, 3, 4, 5} combinados pela operação de adição + e pela de multiplicação × definidas nas tabuadas da Tab. 3.3.
Prove que hC, +, ×i é um corpo. Prove que o grupo hA, ⊕i forma um espaço
vetorial sobre o corpo hC, +, ×i pela multiplicação escalar entre escalares do
corpo hC, +, ×i e elementos do grupo hA, ⊕i definida na tabuada da operação
⊗ apresentada na Tab. 3.3.
Observação: rotações
Naturalmente o estudante há de pensar que tudo isso não passa de pura abstração matemática, delírio destituído de qualquer significado física. Vamos mostrar que não é bem assim.
“ADT-MF” — 2005/11/7 — 8:51 — page 137 — #137
3.5. Espaço vetorial
Figura 3.15: Simetrias para rotações de um triângulo equilátero.
Consideremos um triângulo equilátero e o eixo perpendicular a seu plano
que passa pelo seu centro geométrico (centro do círculo circunscrito), veja
Fig. 3.15. É claro que se girarmos o triângulo de 120◦ , 240◦ e 360◦ em torno
desse eixo, o triângulo assume posições idênticas à inicial, essas novas posições sendo indistinguíveis entre si (quando não se distingue os vértices). Diz-se
que o triângulo é invariante pelas rotações dadas; o observador que o olha, ao
abrir os olhos que manteve fechados enquanto se processa tais rotações não
tem como saber se houve ou não houve rotação. Diz-se também que o triângulo apresenta simetria por rotação. Ora, podemos tomar essas rotações como
elementos de um conjunto A = {a, b, c}, em que o elemento a representa a rotação de 120◦ , b de 240◦ e c de 360◦ , ou de modo mais sintético: a = 120◦ ,
b = 240◦ e c = 360◦ , todas elas no mesmo sentido em torno do eixo mencionado. A operação de girar pode ser indicada como uma operação , com a
qual se pode combinar as rotações sintetizadas por a, b e c. É fácil ver que
esse conjunto de rotações combinadas por forma um grupo abeliano aditivo,
em que o elemento neutro é a rotação c, o inverso de uma rotação corresponde
ao replemento do ângulo 6 que a define. Assim, o inverso de a é b e vice-versa.
Observe-se que 360◦ é múltiplo correspondente à menor rotação; quando há simetria por rotação em torno de um eixo, isto sempre acontece: 360◦ = nθ, com
θ igual à menor rotação do conjunto; o número n se denomina multiplicidade
do grupo de rotações. No exemplo atual n = 3.
A combinação de duas rotações do conjunto goza das propriedades associativa e comutativa. Por outro lado, o conjunto é fechado, tendo em vista o
resultado final á posição do triângulo. A “soma” a a b é igual a a, isto é,
a a b = a, pois girar o triângulo de 120◦ depois mais 120◦ e depois de 240◦
é o mesmo que girar apenas de 120◦ . O leitor pode verificar que essa operação
6
O ângulo que se deve somar a outro para se obter 360◦ .
137
“ADT-MF” — 2005/11/7 — 8:51 — page 138 — #138
138
Capítulo 3. Grandezas Vetoriais
satisfaz a tabuada da operação ⊕ da Tab. 3.2 (pág. 135) do Probl. 3.20. Deste
modo, temos um grupo comutativo hA, i. Por sua vez, esse grupo formará um
espaço vetorial sobre um corpo, por exemplo o corpo hM, +, · i definido também no Probl. 3.20 (pág. 135), desde que se defina a operação de multiplicação
por escalar do corpo e dos elementos do grupo, como a representada pelo sinal
⊗ na Tab. 3.2. Segue-se que esse conjunto de rotações A = {a, b, c} associadas
pela maneira indicada forma um espaço vetorial sobre o corpo hM, +, · i.
Vejamos outro exemplo. Consideremos não mais um triângulo, como no
exemplo anterior, mas um hexágono regular e as rotações em torno do eixo
ortogonal a seu plano que passa pelo seu centro, as quais o deixam invariante.
São evidentemente as rotações a, b, c, e, f de 60◦ , 120◦ , 180◦ , 240◦ , 300◦
e 360◦ respectivamente, todas de mesmo sentido. Essas rotações, combinadas
pela operação de efetuar uma em seguida a outra, formam um grupo abeliano
aditivo, obedecendo à tabuada da operação ⊕ na Tab. 3.3 (pág. 136) do Probl. 3.21, o elemento neutro sendo a de 360◦ , isto é, o elemento f . Analogamente
ao Probl. 3.21, esse grupo forma um espaço vetorial sobre o corpo hC, +, · i,
a operação de multiplicação de seus elementos por escalares do corpo obedecendo à tabuada correspondente a operação ⊗ na Tab. 3.3 do mesmo problema. 7
Voltemos às rotações de um modo geral.
Uma rotação geral θ é uma grandeza física orientada, e como tal pode ser
representada por um segmento de reta orientado, de tal forma que a direção
do segmento é a direção do eixo de rotação, o seu comprimento, medido com
uma escala conveniente, fornece o valor numérico da rotação na unidade correspondente (grau, radiano, etc.). O sentido do segmento orientado para ser
determinado exige porém uma convenção para transformar o sentido de rotação no sentido que é definido pelo sentido do segmento orientado. A convenção
que se costuma adotar é a seguinte: suponhamos que se segure o eixo de rotação com a mão direita, de modo que os dedos em torno do eixo indiquem o
sentido de rotação, o polegar colocado ao longo do eixo indica o sentido do
segmento orientado; outra maneira muito usada de descrever esta convenção
é a do observador ao longo do eixo; se a rotação se processa da direita para
sua esquerda, o sentido do segmento orientado que a representa será dos pés
para a cabeça desse observador. Há muitas grandezas físicas orientadas que
exigem essa convenção para serem representadas por um segmento de reta orientado, como teremos ocasião de examinar, representaremos essas grandezas
7
Note-se que para esses dois exemplos as rotações são consideradas em torno de um mesmo
eixo fixo à figura.
“ADT-MF” — 2005/11/7 — 8:51 — page 139 — #139
139
3.5. Espaço vetorial
Figura 3.16: Convenção para o sentido positivo de rotação em torno de um eixo.
,→
por uma letra encimada por uma curva, como por exemplo B. Esses vetores
são chamados vetores axiais, em contraposição aos outros que se chamam vetores polares. Dos vetores polares já vimos os vetores aplicados em um ponto,
como as forças; veremos que as forças que atuam num corpo rígido podem ser
deslocadas ao longo de sua reta suporte sem alterar em coisa alguma o resultado, por isso são exemplo de vetor definido pela sua reta suporte, o ponto de
aplicação sendo qualquer ao longo dessa reta suporte, esses são chamados vetores deslizantes ou correntes. Se o vetor é caracterizado apenas pela direção,
sentido e valor numérico, então esse vetor polar se denomina vetor livre. Em
suma, na física os vetores se classificam em: vetores polares e vetores axiais.
Os polares são: aplicados, deslizantes e livres.
Recapitulando:
. As rotações finitas em torno de eixos não coincidentes são grandezas
físicas orientadas, representáveis por segmentos de reta orientados, mas
não são vetores, tendo em vista que sua composição não é comutativa,
veja pág. 120. Já as rotações em torno de um mesmo eixo, como nos
exemplos citados, são vetores. Tomamos para exemplos um grupo de
rotações com um número finito de elementos, um grupo com número
finito de elementos se denomina grupo finito.
. As rotações de um corpo sólido em torno de um eixo qualquer também são vetores que podem assumir valores que variam continuamente,
e, neste caso, pode-se introduzir o sinal menos para indicar rotações
em sentido contrário, demonstra-se facilmente que esse conjunto de rotações, representáveis por segmentos de reta orientados ao longo do
“ADT-MF” — 2005/11/7 — 8:51 — page 140 — #140
140
Capítulo 3. Grandezas Vetoriais
eixo, podem ser associados pela regra do paralelogramo (soma algébrica) constituindo um grupo. Esse grupo formará um espaço vetorial
sobre o corpo dos números reais, definida a multiplicação por escalar do
corpo como a multiplicação do corpo.
Tudo isso é importante na definição e cálculo de outras angulares, como velocidade angular, aceleração angular, etc., como veremos. Se tivermos eixos separados é preciso tomar cuidado, pois as rotações finitas não são vetores, mas
as rotações infinitesimais são vetores. O,→estudante
pode se convencer deste fato
,→
(heuristicamente) compondo rotações ∆θ1 e ∆θ2 ,→
em torno
de dois eixos parale,→
los, para facilitar a representação, e tomando ∆θ1 e ∆θ2 que vão diminuindo. 8
Ele verá,→ a posição
final P3 de um ponto P que gira pela soma das duas rota,→
ções ∆θ1 +∆θ2, nessa ordem, tender rapidamente para a posição final P03 , obtida
,→
,→
quando a ordem das soma das rotações ∆θ2 +∆θ1, isto é, a distância P3 P03 tende
para zero como infinitésimo de segunda ordem em relação às rotações:
P3 P03 = k1 (dθ1 )2 + k2 (dθ2 )2
em que k1 e k2 são coeficientes de proporcionalidade. Segue-se que
,→
,→
,→
,→
dθ1 + dθ2 = dθ2 + dθ1 ,
e as rotações
infinitesimais são vetores. Suponhamos que o ponto descreva a
,→
rotação dθ num intervalo de tempo dt, sua velocidade angular será
,→
dθ
ω=
,
dt
,→
,→
,→
como dt é um escalar, θ sendo uma grandeza vetorial, ω também o é. Este
fato nos permite compor ou decompor uma velocidade angular pelas regras do
Cálculo.
Damos aqui um problema para o estudante que tem gosto pelo Cálculo
,→
,→
Problema 3.22. Dadas duas rotações ∆θ1 e ∆θ2 em torno de eixos quaisquer,
demonstre que sua “soma” comuta quando elas se tornam arbitrariamente
pequenas.
8
u
,→
Estaremos denotando por θ o ângulo correspondente à rotação θ.
“ADT-MF” — 2005/11/7 — 8:51 — page 141 — #141
3.6. Exemplos e aplicações das leis de Newton
Esclarecimento Ao tentar explicar esses conceitos, estamos pondo ao alcance do estudante as dificuldades que deverá encontrar no curso de física
e nas aulas de matemática desse curso, onde os mesmos conceitos podem ter
roupagem diversa, dificultando sua assimilação e levando o estudante a desprezar seu estudo por não ser aparentemente de nenhuma utilidade para a Física.
Com esses exemplos da Física Elementar estamos procurando dar ênfase à necessidade de um estudo cuidadoso da matemática, por mais abstrata que lhe
pareça.
3.6
Exemplos e aplicações das leis de Newton
Antes de formularmos as leis de Newton, adotamos alguns postulados auxiliares 9 para que pudéssemos continuar o desenvolvimento com base experimental, os problemas seguintes indicam que os dois primeiros postulados estão
contidos nas 1a e 3a leis de Newton.
Problema 3.23. Demonstre o Post. 1 (pág. 86) com auxílio da 1a e 3a leis de
Newton.
Problema 3.24. Demonstre o Post. 2 (pág. 89) com auxílio da 1a e 3a leis de
Newton.
O próximo problema deve ser resolvido pelo estudante antes de ler a solução detalhada e comentada que apresentamos; comparar as soluções e esclarecer as dúvidas que venham a ocorrer durante a solução é um ótimo exercício.
Problema 3.25. Determine a tensão nos fios AC e BC da estrutura da Fig. ~ = 30 gf.
3.17 em que D é um corpo de peso |P|
Para resolver o problema com as leis de Newton, devemos escolher o corpo
no qual as aplicaremos.
No caso o corpo será o ponto C, que é a confluência dos fios AC, BC e o
fio CM, em que M é o ponto em que o corpo D é preso ao fio vertical. Para
~ do corpo
ilustrar a aplicação das leis de Newton, vamos mostrar que o peso P
D se transmite ao ponto C, de modo que a força que atua em C ao longo do fio
~ desde que o peso do fio CM possa ser desprezado. De
CM é igual ao peso P,
fato, isolemos o fio CM do restante do universo (Fig. 3.18). Agora, vejamos
~ na extremidade M e, na
quais as forças que atuam sobre ele; são: o peso P
9
u Esses postulados auxiliares não foram adotados com status de lei, portanto não esta
mos propondo demonstração de lei.
141
“ADT-MF” — 2005/11/7 — 8:51 — page 142 — #142
142
Capítulo 3. Grandezas Vetoriais
Figura 3.17: Dispositivo correspondente
ao Probl. 3.25.
Figura 3.18: Diagrama das forças correspondentes à Fig. 3.17.
~ Desse modo,
outra extremidade, o ponto C puxa o fio MC com uma força F.
~ e F,
~ apenas. A resultante é R
~ = F~ + P;
~
as forças que atuam no fio CM são P
a
~
como o fio está em repouso (em equilíbrio), então, pela 1 lei de Newton, R = ~0,
~ P
~ = ~0, donde F~ = −P.
~ Ou seja, a força F~ é de mesma intensidade e de
isto é, F+
~ mas de sentido contrário. Ora, F~ é a força com
mesma direção que o peso P,
que o ponto C puxa o fio CM para cima, logo o fio reage e, pela terceira lei de
Newton, puxa o ponto com uma força F~ 0 , de mesma intensidade e direção mas
~ o que se queria demonstrar, isto é, no ponto
de sentido contrário: F~ 0 = −F~ = P,
~ é como se o peso P
~ se tivesse transmitido
C atua uma força igual ao peso P;
10
até o ponto C. Na Fig. 3.19 colocamos as forças que atuam no ponto C, a
saber:
. a força F~1 com que o fio AC puxa o ponto C na direção de A,
. a força F~2 com que o fio BC puxa o ponto C na direção de B, e
~ transmitido pelo fio CM.
. o peso P
Devemos então responder às seguintes perguntas:
1. Qual o corpo a escolher para aplicar as leis de Newton?
2. Quais as forças que o restante do universo exerce sobre o corpo?
10
Observe-se que esse resultado só é obtido porque se considera o fio sem peso, em
~ do corpo D.
caso contrário o peso w
~ do fio se acrescentaria ao peso P
“ADT-MF” — 2005/11/7 — 8:51 — page 143 — #143
143
3.6. Exemplos e aplicações das leis de Newton
Figura 3.19: Forças que atuam no ponto C.
Respondidas a essas perguntas, convém parar para saber se as respostas
estão realmente corretas, se por exemplo não se esqueceu uma força qualquer:
3. São só essas as forças aplicadas?
Depois de analisada a situação e verificado que não houve o esquecimento de
~ = Pi F~i .
alguma força, podemos determinar a resultante das forças aplicadas: R
Passamos em seguida a aplicação das leis de Newton: como o corpo está em
equilíbrio (repouso), logo a resultante das forças nele aplicadas é nula (1a lei
~ = Pi F~i = ~0 . No nosso exemplo:
de Newton): R
~ = F~1 + F~2 + P
~ = ~0
R
(3.4)
Observe-se que esta é uma igualdade vetorial e que, portanto, além dos valores numéricos (intensidades) das forças, teríamos que determinar as direções.
No exemplo, porém, as direções das forças já estão determinadas, pois são
as direções dos fios, seus sentidos também são os que divergem do ponto C,
restam determinar apenas suas intensidades |F~1 | e |F~2 |, e assim restam duas incógnitas. Vamos resolver esse problema pelos três métodos estudados: gráfico,
trigonométrico e analítico.
3.6.1
Solução pelo método gráfico
É claro que faltam dados no problema, os quais são os ângulos que as direções
das forças fazem entre si. São supostos conhecidos, pois fazem parte da estrutura, são os fios AC, BC e CM fazem entre si. Como a Fig. 3.17 está desenhada
em escala, esses ângulos podem ser medidos com o transferidor diretamente
“ADT-MF” — 2005/11/7 — 8:51 — page 144 — #144
144
Capítulo 3. Grandezas Vetoriais
~ e F~2 por θ1 , entre P
~ e F~1
na figura. Na Fig. 3.19 indicamos os ângulos entre P
por θ2 e entre F~1 e F~2 por θ3 . Na Fig. 3.20 passamos o problema para o papel.
Posto isto, a equação (3.4) nos dá:
~.
F~1 + F~2 = −P
Figura 3.20: Forças que atuam no ponto C.
Isto significa que F~1 + F~2 é igual a uma força de sentido contrário ao de
~ de mesma direção e mesma intensidade. Ora, P
~ sendo conhecida, −P
~ tamP,
~
~
bém o é, trata-se portanto de decompor −P segundo as direções de F1 e de
F~2 , o que já sabemos fazer graficamente, tirando pelas tirando pelas extremi~ linhas paralelas às direções de F~1 e
dades do segmento representativo de −P
~
de F2 , determinam-se segmentos orientados sobre as retas suporte de F~1 e de
F~2 . Esses segmentos orientados representam, pela regra do paralelogramo, as
~ e, portanto, representarão as forças F~1 e F~2 que (em concomponentes de −P
~ Medindo-se o ângulo θ3 com o transferidor acha-se
junto) equilibram a força P.
◦
θ3 = 100 e, neste caso, medindo-se na figura os segmentos que representam
~ acha-se:
F~1 e F~2 com a mesma escala com a qual se determinou P
~ = 30 gf .
|F~1 | = 25 gf e |F~2 | = 21 gf se |P|
3.6.2
Solução pelo método trigonométrico
Pelo método trigonométrico sabemos que: 11
~ 1 |2 = |F~1 |2 + |F~2 |2 + 2 |F~1 | |F~2 | cos(θ3 )
|R
|F~1 | sen(θ3 )
tan(ϕ) =
,
|F~2 | + |F~1 | cos(θ3 )
11
Demonstre novamente essas duas expressões.
“ADT-MF” — 2005/11/7 — 8:51 — page 145 — #145
145
3.6. Exemplos e aplicações das leis de Newton
~ e a força componente F~1 . Ora,
onde ϕ é o ângulo entre a resultante R
~ = |P|
~ = 30 gf,
|−P|
θ3 = 100◦
e ϕ = 55◦ ,
visto que ϕ = 180◦ −θ1 = 180◦ −125◦ , sendo θ1 = 125◦ , conforme com o transferidor na figura. Logo teremos:
|F~1 |2 + |F~2 |2 + 2|F~1 | |F~2 | cos(100◦ ) = 900 gf 2
(3.5)
|F~1 | sen(100◦ )
◦) .
=
tan(55
|F~2 | + |F~1 | cos(100◦ )
Um sistema de duas equações com duas incógnitas, |F~1 | e |F~2 |. Como:
cos 100◦ = − cos 80◦ sen 100◦ = sen 80◦ tan 55◦ = 1,428 .
= −0,174 = 0,985 Teremos, substituindo esses valores nas equações do sistema (3.5):
|F~1 |2 + |F~2 |2 − 2×0,174 |F~1 | |F~2 | = 900 gf 2
0,985 |F~1 |
= 1,428
|F~2 | − 0,174 |F~1 |
2
2
2
|F~1 | + |F~2 | − 0,348 |F~1 | |F~2 | = 900 gf
0,985 |F~1 | = 1,428 |F~2 | − 0,174 |F~1 |
Assim, trabalhando a segunda equação,
0,985 |F~1 | = 1,428 |F~2 | − 0,174 |F~1 | = 1,428 |F~2 | − 0,248 |F~1 |
⇒
0,985 |F~1 | + 0,248 |F~1 | = 1,428 |F~2 |
donde
|F~2 | =
⇒
⇒
1,233 |F~1 | = 1,428 |F~2 | ,
1,233 ~
|F1 | = 0,863 |F~1 | .
1,428
Por outro lado,
|F~1 |2 + (0,863 |F~1 |)2 − 0,348 |F~1 | (0,863 |F~1 |) = 900 gf 2
|F~1 |2 + 0,745 |F~1 |2 − 0,295 |F~1 |2 = 900 gf 2
(1,745 − 0,295) |F~1 |2 =
1,450 |F~1 |2 = 900 gf 2
⇒
|F~1 |2 =
Portanto
|F~1 | = 24,95 gf
e
|F~2 | = 21,54 gf .
900
gf 2 .
1,450
“ADT-MF” — 2005/11/7 — 8:51 — page 146 — #146
146
Capítulo 3. Grandezas Vetoriais
3.6.3
Solução pelo método analítico
Para desenvolvermos o método analítico devemos escolher um sistema de eixos coordenados. Tomemos um sistema ortogonal cartesiano em que o eixo
Ox seja horizontal e o eixo Oy vertical, a origem coincidente com o ponto C,
veja Fig. 3.21. Vamos indicar os ângulos entre os eixo Ox e as forças F~1 e F~2
Figura 3.21: Sistema de coordenadas para tratar com as forças que atuam no ponto C.
por α1 e α2 respectivamente. É fácil ver que:
α1 = θ1 − π2 = 125◦ − 90◦ = 35◦
α2 = θ3 + α1 = 100◦ + 35◦ = 135◦
~ é α3 = 270◦ . Temos então: 12
O ângulo entre Ox e P
F1x = F1 cos(α1 ) = F1 cos(135◦ ) = −F1 cos(45◦ ) = −0,707 F1
F2x = F2 cos(α2 ) = F2 cos(35◦ ) = 0,819 F2
P x = P cos(α3 ) = F2 cos(270◦ ) = 0 .
Logo, para as projeções das forças na direção Ox, temos:
Rx = 0
⇒
R x = F1x + F2x + P x = −0,707 F1 + 0,819 F2 = 0 .
(3.6)
Analogamente para as projeções das forças na direção Oy:
F1y = F1 sen(α1 ) = F1 sen(135◦ ) = F1 sen(45◦ ) = 0,707 F1
F2y = F2 sen(α2 ) = F2 sen(35◦ ) = 0,574 F2
Py = P sen(α3 ) = F2 sen(270◦ ) = P×(−1) = −P .
12
u
Estaremos denotando Fi = |F~i | para simplificar a notação.
“ADT-MF” — 2005/11/7 — 8:51 — page 147 — #147
147
3.6. Exemplos e aplicações das leis de Newton
Logo:
Ry = 0 ⇒ Ry = F1y + F2y + Py = 0,707F1 + 0,574F2 − P = 0 .
(3.7)
Pela equação (3.6): 0,707F1 = 0,819F2 , introduzindo este valor em (3.7):
0,819F2 + 0,574F2 = P ⇒ 1,393F2 = 30 gf ⇒ F2 = 21,536 gf ≈ 21,5 gf
Por outro lado:
F1 =
0,819
F2 = 1,158×21,536 gf = 24,94 gf ≈ 24,9 gf .
0,707
Recapitulando, com os métodos gráfico, trigonométrico e analítico, obtivemos os seguintes resultados:
Ḿ
Gráfico
Trigonométrico
Analítico
|F~1 |
|F~2 |
25 gf 21 gf
24,9 gf 21,5 gf
24,9 gf 21,5 gf
Como se vê, os três métodos fornecem praticamente os mesmos resultados,
ocorrendo as discrepâncias no traçado e leitura do diagrama e nas aproximações.
Problemas
Problema 3.26. Um peso P está pendurado por dois fios AC e BC, sendo
considerados inextensíveis e sem peso, conforme indica a Fig. 3.22. Pede-se:
1. Calcular (para dados genéricos) as reações nos pontos A e B da estrutura, aplicando as leis de Newton e usando os três métodos.
2. Monte o um dispositivo para este problema e coloque os dinamômetros
fazendo parte da estrutura e meça por eles as tensões nos fios AC e BC
e use um peso de 20 gf.
3. Compare os valores determinados pelo cálculo (item 1) com os valores determinados experimentalmente (item 2). Calcule as discrepâncias
relativas percentuais entre os valores teóricos e experimentais.
“ADT-MF” — 2005/11/7 — 8:51 — page 148 — #148
148
Capítulo 3. Grandezas Vetoriais
Figura 3.22: Dispositivo para o Probl. 3.26.
4. Explique, aplicando as leis de Newton, como determinar as reações nos
pontos A e B a partir das forças aplicadas em C.
Problema 3.27. Dois pesos P1 = 10 gf e P2 = 20 gf estão pendurados por
um fio conforme indica a Fig. 3.23. Faça a montagem experimental da figura,
Figura 3.23: Dispositivo para o Probl. 3.27.
observando que a linha C1C2 fique na horizontal. 13 Meça os ângulos θ1 , θ2 ,
θ3 , θ4 , θ5 e θ6 . Pede-se:
13
u Esse problema experimental envolve a medição direta de várias grandezas (intensidade
de 2 forças e 6 ângulos), o estudante já deve ter notado que as incertezas (os erros) das medidas
diretas se propagam nos cálculos que envolvem valores obtidos por meio de medidas diretas
[as resultantes calculadas usando (2.2)], i.e., nas medidas indiretas. No cuidado em orientar o
estudante em manter a linha C1 C2 na horizontal há a sutileza do Físico Experimental experiente
e maduro que cuidou de analisar completamente o projeto do experimento; esse cuidado força
os ângulos serem iguais a 90◦ , situação que implica erros experimentais menores para a compa-
“ADT-MF” — 2005/11/7 — 8:51 — page 149 — #149
3.6. Exemplos e aplicações das leis de Newton
1. Aplicar as leis de Newton no ponto C1 e calcular as tensões nos fios AC1
e C1C2 .
2. Aplicar as leis de Newton no ponto C2 e calcular as tensões nos fios BC2
e C2C1 .
3. Coloque os dinamômetros ao longo dos fios AC1 e BC2 e compare as
intensidades de força medidas com as tensões calculadas.
4. Aplicar as leis de Newton ao fio C1C2 e calcular as tensões nos fios AC1
e BC2 .
5. Montado o dispositivo e incluindo um dinamômetro ao longo do fio
C1C2 , compare os resultados e calcule as respectivas discrepâncias relativas percentuais.
Problema 3.28. Um peso P de 10,0 gf está desviado da vertical de um ângulo
de −30◦ por um outro fio transversal CB que forma com a vertical um ângulo
de 120◦ . A vertical é orientada para cima. Calcular as tensões nos fios AC e
BC. Veja Fig. 3.24. Verificar experimentalmente.
Figura 3.24: Diagrama para o Probl. 3.28.
Exercícios
Exercício 3.1. Seis forças estão aplicadas em um ponto, suas intensidades
são: 30 gf, 40 gf, 50 gf, 20 gf, 30 gf e 40 gf, e os ângulos que elas formam
coma a primeira força são respectivamente: 60◦ , 120◦ , 210◦ , 270◦ , 330◦ . Pedese a força resultante.
ração das intensidades das forças medidas por meio dos dinamômetros com as correspondentes
calculadas em função das outras grandezas medidas, além das correspondentes direções.
149
“ADT-MF” — 2005/11/7 — 8:51 — page 150 — #150
150
Capítulo 3. Grandezas Vetoriais
Solução. Tomemos o eixo dos x coincidente com a direção e sentido da primeira força F~1 , veja Fig. 3.25. Deste modo, os ângulos que as outras forças
formam com o eixo dos x são: θ2 = 60◦ , θ3 = 120◦ , θ4 = 270◦ , θ5 = 270◦ ,
θ6 = 330◦ , obviamente θ1 = 0◦ , respectivamente, o ângulo entre a primeira força
e o eixos dos x. Para facilitar, fazemos a tabela como a Tab. 3.4. Segue-se que:
Figura 3.25: Ilustração para o exercício 3.1.
Tabela 3.4: Valores do exercício 3.1.
|F~i |
θi
cos(θi )
sen(θi )
(g f )
F~1
F~2
F~3
F~4
F~5
F~6
P~
Fi
P
Fiy
(g f )
30
0◦
+1
0
30,0
0,0
40
60◦
+1/2
+0,87
20,0
34,8
50
120
◦
−1/2
+0,87
−25,0
43,5
210
◦
−0,87
−1/2
−17,4
−10,0
270
◦
0
−1
0,0
−30,0
330
◦
+0,87
−1/2
34,8
−20,0
20
30
40
84,8 − 42,4
~
R
Rx =
Fix
(g f )
78,3 − 60,0
42,4
18,3
P
Fix = 42,4 gf e Ry = Fiy = 18,3 gf, assim:
X 2 X 2
~2=
|R|
Fix +
Fiy = (42,4)2 + (18,3)2
= 797,76 + 334,89
= 2132,65 gf 2 , daí
~ = 46,2 gf ,
|R|
“ADT-MF” — 2005/11/7 — 8:51 — page 151 — #151
3.6. Exemplos e aplicações das leis de Newton
~ será obtido de:
por sua vez, o ângulo entre o eixo dos x e a resultante R
tan(ϕ) =
Ry 18,3
=
= 0,431 donde: ϕ ≈ 23◦ 200 .
R x 42,4
Resolva esse problema pelo método gráfico e compare os resultados.
Exercício 3.2. Recorde o estudo das funções trigonométricas dos ângulos de
zero a 360◦ .
Exercício 3.3. A que se reduz a regra do polígono para duas forças F~1 e F~2
que fazem entre si um ângulo θ? Veja Fig. 3.26. Freqüentemente o triângulo
a que se reduz o polígono é denominado triângulo de forças. Cuidado! veja
§2.12, pág. 102.
Figura 3.26: Ilustração para o exercício 3.3.
Exercício 3.4. Cinco forças [F~1 , F~2 , F~3 , F~4 , F~5 ] estão aplicadas em um ponto
P. Para exprimi-las, toma-se um sistema de eixos coordenados cartesianos
ortogonais. As forças formam com o eixo dos x os ângulos: 30◦ , 90◦ , 150◦ ,
240◦ e 300◦ respectivamente. As intensidades das forças são respectivamente:
30 gf, 50 gf, 20 gf, 40 gf, e 50 gf. Determine a resultante pelos métodos gráfico
e analítico.
Exercício 3.5. Cinco forças de mesma intensidade estão aplicadas em um
ponto P e se dispõem no plano sucessivamente segundo os raios de um hexágono regular. Qual a força a ser aplicada em P para obter uma resultante
nula?
Exercício 3.6. Escreva o enunciado de cada uma das três leis de Newton, sem
olhar o livro. Sem ler o que escreveu, enuncie-as em voz alta.
Exercício 3.7. José empurrou o João traiçoeiramente, e José caiu mas João
não. É possível que isso aconteça? Como? Quem empurrou o José?
Exercício 3.8. Explique a terceira lei de Newton para um leigo e de modo que
ele entenda perfeitamente.
151
“ADT-MF” — 2005/11/7 — 8:51 — page 152 — #152
152
Capítulo 3. Grandezas Vetoriais
Exercício 3.9. Um lustre está pendurado no teto de uma casa por dois fios
que fazem ângulos de 30◦ com a vertical. O lustre pesa 20 kgf. Calcular as
reações do teto nos pontos onde os fios se prendem. Dar uma aula explicando
como aplicar as leis de Newton para resolver esse problema.
Exercício 3.10. Uma corda grossa de 2 kgf está presa por uma extremidade
ao galho de uma árvore, na outra extremidade está pendurado um garoto de
20 kgf de peso. Ele brinca. Pergunta-se qual a reação do galho quando o
menino está preso à corda e em repouso. Explique aplicando as leis de Newton.
Exercício 3.11. Uma corda AB é presa pelo meio C a uma outra CD. Três
homens puxam as extremidades dos três pedaços que ficam num plano horizontal, com forças de mesma intensidade. Se as três forças se equilibram,
quais os ângulos entre as forças? As três forças em equilíbrio poderiam não
ser coplanares? Por quê?
Exercício 3.12. Três forças F~1 , F~2 e F~3 de mesma intensidade e coplanares
estão aplicadas em um ponto P. O ângulo entre F~1 e F~2 é 60◦ e o ângulo
entre F~2 e F~3 também é 60◦ . Qual a força F~4 que se deve aplicar em P para
equilibrar as três?
Exercício 3.13. Que é um grupo, em matemática? Quantas operações entre
elementos de um conjunto A são necessárias para caracterizar um grupo em
A? Que é elemento neutro ou elemento identidade? Qual a propriedade do
inverso de um elemento de um grupo? Dê exemplos de grupos.
Exercício 3.14. Que é corpo, em matemática? Quantas operações são necessárias para caracterizar um corpo em um conjunto A? Quantos elementos
neutros existem em um corpo? Quais as relações existentes entre as operações
definidas que caracterizam um corpo? Dê exemplos de corpos.
Exercício 3.15. Que é espaço vetorial, em matemática? Quantas operações
em um conjunto A são necessárias para caracterizar um espaço vetorial em A?
Quantos elementos neutros existem em um corpo? A multiplicação no corpo de
escalares é a mesma que a multiplicação por escalares do corpo? Dê exemplos
de espaço vetorial?
Exercício 3.16. Que é vetor? Vetor é um elemento de um espaço vetorial. Um
vetor é sempre uma grandeza física vetorial? Uma grandeza física orientada
é sempre uma grandeza física vetorial? Exemplifique.
“ADT-MF” — 2005/11/7 — 8:51 — page 153 — #153
3.6. Exemplos e aplicações das leis de Newton
Exercício 3.17. Quantos tipos de grandezas físicas vetoriais você conhece?
Que é vetor axial? Que é vetor polar? Quantos tipos de vetor polar você conhece?
O exercício que se segue é para reflexão e para ser lido com cuidado.
Exercício 3.18. Um vetor axial é um ente muito diferente de um vetor polar. 14
Senão vejamos.
Sistema de coordenadas levógiro Exprimimos as grandezas físicas em sistemas de coordenadas adotados em referencias; os mais usados na Física são
as coordenadas cartesianas ortogonais (quando não há simetrias relevantes a se
considerar). No plano são dois eixos retilíneos ortogonais e no espaço (tridimensional) três eixos retilíneos triortogonais. Os eixos são usualmente designados pelas letras x, y e z: Ox, Oy e Oz. A orientação dos eixos no plano já foi
vista no §1.10, pág. 45, mas qual a orientação do eixo Oz, qual o sentido desse
eixo?
Tanto na Física como na Matemática se usam os sistemas levógiros 15 ou
sinistrogiro, ou ainda sistemas diretos que são obtidos do seguinte modo:
Segura-se (imagina-se segurar) o eixo Oz com a mão direita, o polegar apontando o sentido do eixo Oz, os outros dedos indicando
a rotação que se deve efetuar com o eixo Ox em torno de Oz, varrendo o menor ângulo formado entre Ox e Oy, para levar Ox sobre
Oy, a Fig. 3.27 ilustra essa orientação.
A seguinte convenção também é usada:
Seja um observador em pé na origem O, sobre o plano xy; o sentido de Oz será dos pés para a cabeça desse observador se ele
tiver que girar o eixo Ox da sua direita para a sua esquerda, sinistrogiro ou levógiro, a fim de fazer os dois eixos coincidirem,
varrendo o menor ângulo.
14
u Por vetor polar se está entendendo grandezas vetoriais aplicadas em um ponto no
espaço físico, com por exemplo: força aplicada sobre uma partícula, deslocamento de uma partícula entre dois pontos, velocidade e aceleração de uma partícula em um instante ao passar por
dada posição, etc.
15
u Os dicionários adotam a grafia preferencial: levogiro, “diz-se do que gira para a es
querda”. Mantivemos a grafia acentuada porque o Prof. Armando sempre falou e escreveu esse
termo com essa tônica.
153
“ADT-MF” — 2005/11/7 — 8:51 — page 154 — #154
154
Capítulo 3. Grandezas Vetoriais
Figura 3.27: Regra da mão direita (a) e regra da mão esquerda (b).
Os eixos Oxyz orientados desse modo (e nessa ordem) se denominam diretos, sinistrogiros ou levógiros. Podemos também orientá-los com a mão esquerda, o polegar apontando no sentido do eixo Ox, enquanto os outros dedos
indicarão o sentido de rotação em torno de Oz, para levar o eixo Ox varrendo
o menor ângulo sobre o eixo Oy. Ou ainda:
O observador em pé, na origem O, sobre o plano xy, no sentido
do eixo Oz será dos pés para a cabeça desse observador se ele
tiver que fazer girar o eixo Ox, em torno de Oz, varrendo o menor
ângulo, para levá-lo sobre o eixo Oy, com uma rotação de sua
esquerda para sua direita, dextrógiro ou dextrorso.
Obteremos o mesmo resultado se trocarmos o sentido de apenas um qualquer dos eixos do primeiro sistema. Se colocarmos um relógio sobre o plano
xy do sistema levógiro, o observador verá o movimento de rotação do eixo Ox
se processar no sentido contrário ao do movimento dos ponteiros do relógio, o
contrário acontece no sistema dextrógiro.
Vetor axial Para representar um vetor axial por um segmento de reta orientado devemos fazer uma convenção para transformar o sentido de rotação
num sentido de translação. Ora, se a convenção é a da mão direita, é obvio
que o segmento de reta terá um sentido inverso do segmento que representará a mesma rotação quando a convenção é a da mão esquerda. Observe-se
“ADT-MF” — 2005/11/7 — 8:51 — page 155 — #155
155
3.6. Exemplos e aplicações das leis de Newton
na Fig. 3.27 (a) e (b) que tanto a mão direita como a mão esquerda indicam
o mesmo sentido de rotação em torno do eixo Oz, mas os polegares indicam
sentidos contrários de translação sobre Oz. Isso significa que o segmento que
representa um vetor axial trocará de sentido quando se passa de um sistema de
coordenadas levógiro para um dextrógiro. Em outras palavras, um vetor axial
não será representado pelo mesmo segmento de reta orientado nos dois sistemas de coordenadas, isto é, ele não é invariante quando se passa de um sistema
de coordenadas levógiro para um dextrógiro, e vice-versa. E agora? Afinal
uma grandeza física não pode depender do sistema de coordenadas que a representa (num mesmo referencial físico), devendo ficar sempre a mesma, seja
qual for o sistema de coordenadas adequado para sua representação. Aliás, um
outro ponto de vista para o estudo das grandezas físicas é exatamente aquele
expresso pelo critério de que as grandezas físicas devem ficar invariantes relativamente às transformações de sistemas de coordenadas 16 . Tomando-se por
base esse critério, pode-se desenvolver o cálculo vetorial e esclarecer muitas
propriedades das grandezas vetoriais que ficam ocultas em outros tratamentos.
Deste ponto de vista, um vetor é uma grandeza invariante para transformações
de coordenadas e possui 3 componentes no espaço de 3 dimensões 17 . Desenvolve-se ainda o estudo de grandezas físicas mais complicadas, por exemplo,
aquelas que têm 9 componentes no espaço de 3 dimensões e que se denominam tensores de 2a ordem, a seguir generaliza-se esse conceito de tensor para
uma ordem qualquer. Um tensor de ordem zero é um escalar, um tensor de 1a
ordem é um vetor.
Tensor anti-simétrico de segunda ordem e rotação Um tensor de segunda
ordem em um espaço de dimensão 3 tem 9 componentes:
A xx ;
A xy ;
A xz ;
Ayx ;
Ayy ;
Ayz ;
Azx ;
Azy ;
Azz .
Um tensor anti-simétrico de 2a ordem terá as seguintes características:
A xx = Ayy = Azz = 0 ;
A xy = −Ayx ;
A xz = −Azx ;
Ayz = −Azy ;
estas seis últimas propriedades se denominam anti-simétricas. O tensor antisimétrico (no espaço de 3 dimensões) tem três componentes sempre nulas e
16
u Essa hipótese é uma Lei Física Fundamental que raramente é enunciada explicita
mente, mas que é válida em qualquer teoria física, sempre. Essa hipótese coloca a Análise
Tensorial como matéria fundamental para a formação em Física.
17
u E que se submete a uma lei bem definida para a mudança de representação quando se
muda o sistema de coordenadas.
“ADT-MF” — 2005/11/7 — 8:51 — page 156 — #156
156
Capítulo 3. Grandezas Vetoriais
três valores distintos para as outras, a menos do sinal. Uma rotação é um tensor anti-simétrico de 2a ordem. Um vetor axial não é mais que um vetor cujas
componentes são uma das ternas das componentes do tensor anti-simétrico,
em outras palavras, podemos definir o vetor axial como o vetor do tensor anti-simétrico, por meio do produto contrato tensorial 18 do tensor anti-simétrico
pelo tensor de 3a ordem εrst ; em notação tensorial: θr = εrst θ st , em que θr , ou
melhor: θ1 , θ2 , θ3 são os componentes do vetor axial, dado pela convenção que
orienta os eixos do sistema de referência, por isso mesmo ele muda de sentido quando se passa de um sistema de coordenadas para outro de orientação
diversa. Por isso os vetores axiais são chamados pseudo-vetores. O Cálculo
Tensorial será estudado na Elasticidade. O estudante não deve se impressionar
com essa matemática que ainda não entende, verá no seu devido tempo que
não é difícil; é colocada aqui para que veja o que há por baixo da simplicidade
da Física Experimental e saber qual o domínio de validade de argumentos elementares, os quais devem ser generalizados ou tidos como absolutos, pois pode
incorrer em grave erro e ficar tolhido na hora de aprender os conceitos em toda
sua generalidade (ou em sua generalidade estendida).
Voltaremos a este assunto tema quando estudarmos produto vetorial de
dois vetores.
u Por ora, acrescentamos a seguinte observação: considere o produto matriNota cial
0
α3
−α2
−α3
0
α1
α2 A1
−α1 A2 = E~
A3
0
(3.8)
~ = A1 ı̂+ A2 ̂+ A3 k̂ é a representação em dada representação do vetor A;
~ então,
onde A
~
sendo E = E1 ı̂+E2 ̂+E3 k̂ nessa representação, tem-se:
E1 α2 A3 − α3 A2
E2 = α3 A1 − α1 A3
α1 A2 − α2 A1
E3
situação em que se pode (apenas para espaços tridimensionais) considerar os vetores
~eα
~ = α1 ı̂+α2 ̂+α3 k̂, e nesse caso também podemos considerar (apenas para espaços
A
~ = E.
~ Note-se que o “produto vetorial” só
~×A
tridimensionais) o produto vetorial: α
~ “traduz” o tensor anti-simétrico repreestá definido em três dimensões, onde o ente α
sentado na matriz 3×3 que está definindo o vetor E~ em (3.8). Observamos ainda que no
Cálculo Vetorial tridimensional são definidos dois “produtos”: o escalar e o vetorial,
18
u
Contração tensorial.
“ADT-MF” — 2005/11/7 — 8:51 — page 157 — #157
3.6. Exemplos e aplicações das leis de Newton
porém, num espaço vetorial não há definição de multiplicação decente, como há em
um corpo, por exemplo, com inverso multiplicativo a ele associado a cada elemento
(exceto possivelmente um). Mas, conforme já disse o Prof. Armado, o estudante não
deve se preocupar com esses detalhes no estágio atual, porém deve ficar atento e “encucado”.
157
“ADT-MF” — 2005/11/7 — 8:51 — page 158 — #158
158
“ADT-MF” — 2005/11/7 — 8:51 — page 159 — #159
Capítulo 4
Estudo do corpo rígido
As leis de Newton falam em corpo 1 , entretanto, como vimos no estudo da
1a lei, alertamos o estudante para o fato de que essa 1a lei estabelecia a condição necessária para que um corpo estivesse em equilíbrio, mas que tal condição
não era suficiente. 2 Em outras palavras, a resultante das forças aplicadas em
um corpo pode ser nula e o corpo não estar em equilíbrio. De fato, o corpo pode
estar submetido a um conjunto de duas forças F~ e F~ 0 tais que F~ + F~ 0 = ~0, i.e.,
~ = ~0, mas tendo diferentes pontos de aplicação e diferentes retas suporte, paR
ralelas, veja Fig. 4.1. Esse conjunto de forças forma o que se denomina binário
Figura 4.1: Corpo rígido sujeito a força resultante nula e em situação em que não está
em equilíbrio.
1
u Não se deve confundir corpo físico com corpo matemático, o contexto sempre deixará
a distinção clara.
2
u Enunciamos as leis de Newton para um corpo; não o fizemos para uma partícula,
situação para a qual a 1a lei de Newton é condição necessária e suficiente.
159
“ADT-MF” — 2005/11/7 — 8:51 — page 160 — #160
160
Capítulo 4. Estudo do corpo rígido
ou conjugado.
O binário é um (1) conjunto de duas forças paralelas, de sentidos contrários, mesma intensidade, mas de retas suporte não coincidentes. É fácil ver que
o corpo sob a ação do binário irá executar um movimento de rotação acelerado.
Esse movimento se processa em torno de um eixo que passa pelo centro de
massa do corpo (se não houver um eixo físico, fixando outro eixo de rotação)
e é ortogonal ao plano das duas forças. Tudo isso será estudado e demonstrado
na Dinâmica.
Ora, se as dimensões do corpo se reduzem a um ponto, é óbvio que as duas
retas suporte das forças que constituem o conjugado coincidirão, e neste caso
as duas forças se equilibrarão, isto é, o corpo (pontual) estará em equilíbrio
quando sujeito as essas duas forças. Um corpo de dimensões desprezíveis, ou
ainda um ponto dotado de massa se denomina partícula. Deste modo, a 1a lei
de Newton pode ser enunciada:
A condição necessária e suficiente para que uma partícula esteja em
equilíbrio é que a resultante das forças aplicadas sobre ela seja nula.
Devemos estudar agora o efeito das forças sobre os corpos cujas dimensões
são apreciáveis, e tais que se tenha de considerar o efeito de binários sobre o
corpo, e quais as condições de equilíbrio nesse caso. Para isso introduz-se o
conceito de corpo rígido que passamos a definir:
Corpo rígido é o corpo tal que dados dois quaisquer de seus pontos
P1 e P2 , a distância entre eles permanece inalterável, seja qual for o
sistema de forças aplicadas ao corpo.
Na natureza não existe nenhum corpo conhecido nessas condições, todos os
corpos (até os sólidos) se deformam, em maior ou menor grau, sob a ação de
um sistema de forças.
Postulado 5. Duas forças aplicadas em pontos distintos de um corpo rígido
estão em equilíbrio quando têm a mesma intensidade, mesma reta suporte e
sentidos contrários.
Esse postulado é uma proposição auxiliar para o estudo e visa a mostrar
que uma força aplicada num corpo rígido se comporta como um vetor corrente
ou deslizante, conceito que será esclarecido logo a seguir e que permitirá estabelecer o conceito de momento de uma força em relação a um eixo. Posto isso,
esse postulado será demonstrado pela 1a lei de Newton relativa ao corpo rígido: substitui-se um postulado restrito, que passa a ser um teorema, por outro
mais geral.
“ADT-MF” — 2005/11/7 — 8:51 — page 161 — #161
4.1. Vetor deslizante ou vetor corrente
Para abreviar a linguagem vamos definir um sistema nulo de forças:
Sistema nulo de forças é o sistema de forças aplicadas em um corpo
rígido que não altera o equilíbrio do corpo.
Se C é um corpo rígido em equilíbrio e sobre ele aplicarmos um sistema de
forças F~1 , F~2 . . . F~n , permanecendo o corpo C em equilíbrio, então o sistema
de forças considerado é um sistema nulo de forças. Ver Fig. 4.2.
Figura 4.2: Exemplo de sistema nulo de forças.
O primeiro exemplo de sistema nulo de forças é constituído de forças aplicadas em um ponto do corpo rígido cuja resultante seja nula.
O segundo exemplo é fornecido pelo sistema de duas forças de mesma
intensidade, mesma reta suporte e sentidos contrários, conforme estabelecido
no principio anterior.
Postulado 6. A ação de um sistema qualquer de forças aplicadas em corpo
rígido não será alterada quando somarmos ou subtrairmos ao sistema um
sistema nulo de forças. 3
4.1
Vetor deslizante ou vetor corrente
Vamos mostrar que uma força aplicada em um corpo rígido pode ser deslocada
ao longo de sua reta suporte sem alterar as condições a que esteja submetido o
corpo. Sendo assim, a força aplicada a um corpo rígido não será mais caracterizada pelo seu ponto de aplicação, mas pela sua reta suporte. Uma grandeza
vetorial que se comporta desse modo se denomina vetor deslizante ou vetor
corrente.
De fato, seja F~1 aplicada no ponto P1 de um corpo rígido (Fig. 4.3). Tomemos um ponto P qualquer de sua reta suporte e suponhamos aplicado em P
um sistema nulo de forças F~10 e F~2 tais que: F~1 = F~10 = −F~2 , isto é, tenham a
3
Õ̧ – O estudante não se deve impressionar com o número de postulados,
deve lembrar-se que os dois primeiros foram substituídos pelas leis pelas leis de Newton; esses
também o serão.
161
“ADT-MF” — 2005/11/7 — 8:51 — page 162 — #162
162
Capítulo 4. Estudo do corpo rígido
mesma intensidade e a mesma reta suporte que F~1 , sendo F~10 de mesmo sentido
que F~1 e F~2 de sentido contrário.
Figura 4.3: Ilustração para vetor deslizante.
Consideremos agora as forças F~1 e F~2 , elas formam um sistema nulo de
forças pelo Post. 5, e portanto pode ser retirado do corpo. O resultado é que
ficamos com uma força F~10 aplicada no ponto P, ponto genérico da reta suporte
de F~1 , de mesma intensidade e sentido que F~1 ; isso equivale dizer que a força
F~1 “deslizou” para o ponto P da sua reta suporte sem alterar as condições a
que o corpo C estava submetido.
Com base nesse resultado podemos resolver muitos problemas referentes
a sistemas de forças aplicadas em um corpo rígido.
4.2
Composição de forças aplicada em um corpo
rígido
4.2.1
Caso de forças concorrentes em um ponto
Suponhamos n forças aplicadas em um corpo rígido: F~1 , F~2 . . . F~n , e que todas
as suas retas suporte se encontram em um ponto P. Desse modo, temos as n
~ do
forças aplicadas em um ponto e podemos assim determinar a resultante R
sistema (de forças). Veja Fig. 4.4.
4.2.2
4.2.2.1
Caso de forças paralelas
Duas forças paralelas e de mesmo sentido
Suponhamos inicialmente duas forças paralelas e de mesmo sentido. Neste
caso não se pode aplicar a propriedade de vetor deslizante, visto que sendo as
forças paralelas elas só se encontram no infinito.
Podemos solucionar esse caso do seguinte modo: adicionamos ao sistema
aplicado um outro constituído de duas forças f~1 e f~2 tal que f~1 = − f~2 e que:
f~1 esteja aplicada no ponto P1 de aplicação de F~1 , e f~2 esteja aplicada no
“ADT-MF” — 2005/11/7 — 8:51 — page 163 — #163
4.2. Composição de forças aplicada em um corpo rígido
Figura 4.4: Corpo rígido sujeito a forças concorrentes em um ponto.
ponto P2 de aplicação de F~2 . Veja Fig. 4.5. Como se vê, esse sistema é um
Figura 4.5: Corpo rígido sujeito a duas forças paralelas, F~1 e F~2 , às quais se acrescenta o sistema nulo de forças f~1 e f~2 (P1 P2 = a e P1 Q = b).
sistema nulo de forças, portanto, pelo Post. 6, não alterará a ação do sistema
de forças paralelas. Podemos agora compor as forças f~1 e F~1 em P1 e f~2 e F~2
~1 e R
~ 2 , cujas retas suporte
em P2 . Obteremos respectivamente as resultantes R
~
~
tem um ponto em comum: o ponto P. Fazemos R1 e R2 deslizarem para P e aí
~ =R
~1 + R
~ 2 . O problema recai no caso anterior de
as compomos na resultante R
~
duas forças concorrentes e fica assim resolvido. Se quisermos, deslocamos R
~
para a intersecção Q da sua reta suporte com a linha P1 P2 . Decompondo-se R
163
“ADT-MF” — 2005/11/7 — 8:51 — page 164 — #164
164
Capítulo 4. Estudo do corpo rígido
~1 e R
~ 2 em P e nas componentes f~1 , F~1 , f~2 e F~2 , segue-se que:
em R
~=R
~1 + R
~ 2 = ( f~1 + F~1 ) + ( f~2 + F~2 )
R
= F~1 + F~2 .
~ é paralela a direção de F~1 ou F~2 .
Como F~1 e F~2 são paralelas, então R
Indiquemos por a a distância P1 P2 e por b a distância P1 Q, em que o ponto
~ com P1 P2 , a determinar. É fácil verificar
Q é a intersecção da reta suporte de R
que os triângulos P1 QP e ABP1 são semelhantes, do mesmo modo que os
triângulos QP2 P e CB0 P2 (Porquê?). Sendo assim:
P1 Q
PQ
=
| f~1 |
|F~1 |
ou
b
PQ
=
| f~1 |
,
|F~1 |
1
donde
PQ
=
| f~1 |
.
b |F~1 |
Analogamente:
QP2
PQ
=
| f~2 |
|F~2 |
Portanto:
ou
a−b
PQ
=
| f~2 |
,
|F~2 |
| f~1 |
| f~2 |
=
b |F~1 |
(a − b) |F~2 |
donde
mas
1
PQ
=
| f~2 |
(a − b) |F~2 |
.
| f~1 | = | f~2 | ,
obtendo-se assim:
(a − b)|F~2 | = b|F~1 | ⇒ a|F~2 | − b|F~2 | = b|F~1 | ⇒ a|F~2 | = b |F~1 | + |F~2 | ,
finalmente:
4.2.2.2
b =
|F~2 |
|F~1 | + |F~2 |
a .
Duas forças paralelas e sentidos contrários
Vejamos agora o caso de duas forças paralelas mas de sentidos contrários. De
~ =R
~ 1+R
~ 2 das forças concorrentes
maneira análoga se conclui que a resultante R
~1 e R
~ 2 , obtidas somando-se ao sistema um sistema nulo de forças f~1 e f~2
R
aplicadas nos pontos P1 e P2 de F~1 e F~2 respectivamente, é paralelas a F~1 e F~2
~ = F~1 + F~2 , tendo R
~ intensidade igual a diferença das intensidades de
e tal que R
F~1 e F~2 , o sentido sendo da maior.
~ com a reta suporte da linha
O ponto Q, intersecção da linha suporte de R
P1 P2 = a, se obtém de maneira análoga ao caso anterior. Considerando os
“ADT-MF” — 2005/11/7 — 8:51 — page 165 — #165
165
4.2. Composição de forças aplicada em um corpo rígido
Figura 4.6: Corpo rígido sujeito a duas forças paralelas, F~1 e F~2 , de sentidos contrários.
triângulos semelhantes P1 AB e P1 QP, e ainda os triângulos P2CD e P2 QP, e
ainda os triângulos P2CD e P2 QP, semelhantes, temos:
QP
P1 Q
=
|F~1 |
| f~1 |
⇒
QP =
P1 Q ~
|F1 |
| f~1 |
PQ
P2 Q
=
|F~2 |
| f~2 |
⇒
QP =
P2 Q ~
|F2 | .
| f~2 |
e
Como P1 Q = a + b e P2 Q = b, temos:
a+b
b
× |F~1 | =
| f~1 |
| f~2 |
e como | f~1 | = | f~2 |, segue-se que: (a + b) |F~1 | = b |F~2 |, donde se tira que
b =
|F~1 |
|F~2 | − |F~1 |
a ,
~ sendo:
a resultante R
~ = F~2 − F~1 .
R
(4.1)
“ADT-MF” — 2005/11/7 — 8:51 — page 166 — #166
166
Capítulo 4. Estudo do corpo rígido
Observe-se que a resultante terá para intensidade a diferença entre a maior
intensidade e a menor intensidade de força, o sentido da maior, a direção paralela a das forças (paralelas); sua reta suporte corta a linha que liga os pontos
de aplicação das componentes em um ponto Q fora do segmento determinado
pelos pontos de aplicação e do lado da força maior, a uma distância b dada
pela eq. (4.1). Convém aqui tecer alguns comentários sobre esse resultado. Suponhamos que a força F~1 , menor, tem uma intensidade que tende para a intensidade de F~2 . Neste caso
~ = lim F~2 − F~1 = ~0 ,
lim R
F~1 →F~2
F~1 →F~2
isto é, a resultante terá intensidade nula quando a intensidade de F~1 for igual
(ou no limite para) a de F~2 , no caso de as forças serem paralelas e de sentidos
contrários; por outro lado, o ponto de aplicação da resultante obtido pela distância b, dada por (4.1), se afasta indefinidamente do ponto de aplicação de F~1
quando |F~1 | tende para |F~2 |, ou em símbolos: 4
|F~1 |
× a = ∞ .
lim b = lim
~2 | − |F~1 |
|F~1 |→|F~2 |
|F~1 |→|F~2 | | F
Neste caso teremos uma força nula aplicada no infinito.
Este caso é muito importante do ponto de vista conceitual, por isso vamos
explicitá-lo bem. Temos duas forças paralelas F~1 e F~2 , de mesma intensidade:
|F~1 | = |F~2 |, mas de sentidos contrários, aplicadas em dois pontos distintos: P1
e P2 de um corpo rígido. Trata-se pois do binário ou conjugado de que já
falamos no início deste capítulo, a resultante do binário, isto é, a resultante
das suas componentes F~1 e F~2 é nula e seu ponto de aplicação se situa no
infinito. Como já dissemos, o corpo sob a ação do conjugado não estará em
equilíbrio, mas girando com movimento circular acelerado em torno de seu
“centro de massa”. Todos esses conceitos serão examinados cuidadosamente
mais tarde. Aqui apenas completamos o raciocínio enunciando claramente sua
conseqüência a fim de que o estudante não extrapole chegando a conclusões
erradas. Observe-se a Fig. 4.7, em que se representa um corpo rígido (uma
lâmina rígida) sob a ação de um conjugado; o centro de massa CM do corpo
está fora do segmento P1 P2 , cujas extremidades são os pontos de aplicação
das forças do conjugado 5 , entretanto o corpo rígido gira em torno do centro
4
No caso das forças paralelas e de sentidos contrários.
Ou, equivalentemente, P1 e P2 são pontos da reta suporte de F~1 e de F~2 , respectivamente, obtidos por intersecção com uma reta que passa por CM, afinal as forças que atuam em
um corpo rígido são vetores deslizantes.
5
u
u
“ADT-MF” — 2005/11/7 — 8:51 — page 167 — #167
4.2. Composição de forças aplicada em um corpo rígido
Figura 4.7: Corpo rígido sujeito a um binário.
de massa com movimento angular acelerado 6 . O centro de massa, nesse caso,
permanece em equilíbrio, i.e., parado ou em movimento retilíneo e uniforme.
O estudante não deve preocupar-se por não ter ainda a demonstração do
que foi enunciado anteriormente, tê-la-á quando estudarmos a dinâmica do
corpo rígido. Aqui se menciona esse fato para que não haja risco de haver
qualquer generalização errônea, consciente ou não, por parte do estudante.
Exercícios e problemas
Problema 4.1. Que é partícula na Mecânica de Newton?
Problema 4.2. Qual a condição necessária e suficiente para que uma partícula esteja em equilíbrio?
Problema 4.3. A condição de equilíbrio para uma partícula vale para um
corpo qualquer? Explique.
Problema 4.4. O que é corpo rígido?
Problema 4.5. Qual a condição para que duas forças aplicadas em pontos
distintos de um corpo rígido estejam em equilíbrio?
Problema 4.6. O que é um sistema de forças? Que é um sistema nulo de
forças?
Problema 4.7. Dê exemplos de sistemas nulos de forças aplicados em corpos
rígidos.
6
u Quando não há um eixo (físico) perpendicular ao plano da lâmina rígida que a obrigue
a girar em torno desse eixo físico.
167
“ADT-MF” — 2005/11/7 — 8:51 — page 168 — #168
168
Capítulo 4. Estudo do corpo rígido
Problema 4.8. Um sistema nulo de forças altera a ação de outro sistema qualquer de forças?
Problema 4.9. Há alguma diferença relativamente à força aplicada se você
puxa um corpo por um ponto P ou o empurra por outro ponto Q na mesma
direção e sentido com força de mesma intensidade? Por quê? 7
Problema 4.10. Que é vetor corrente ou vetor deslizante? Dê exemplos.
Problema 4.11. Demonstre que uma força aplicada em um corpo rígido é um
vetor deslizante.
Problema 4.12. Duas forças F~1 e F~2 de 3 kgf e 4 kgf estão aplicadas em um
corpo rígido em dois pontos P1 e P2 respectivamente, os quais distam entre si
~ e
20 cm. Suas direções formam um ângulo θ = 30◦ . Determine a resultante R,
~
o ponto de aplicação de R sobre o segmento P1 P2 . Use os métodos gráfico e
trigonométrico.
Problema 4.13. Três forças F~1 , F~2 e F~3 , de 2 kgf, 4 kgf e 3 kgf respectivamente, atuam num corpo rígido em pontos P1 , P2 e P3 alinhados, sendo
P1 P2 = 40 cm e P1 P3 = 70 cm. A força F~1 forma com P1 P2 um ângulo 90◦ ,
F~2 forma com P1 P2 um ângulo 40◦ e F~3 forma com a mesma direção um ân~ das três forças, e o ponto de
gulo −50◦ , veja Fig. 4.8. Determine a resultante R
~ sobre a reta P1 P2 . Use apenas o método gráfico. Componha
aplicação de R
~
~
F1 com F2 e, em seguida, com F~3 ; depois componha F~2 com F~3 e, em seguida,
com F~1 ; o resultado deve ser o mesmo.
Figura 4.8: Do Probl. 4.13.
Problema 4.14. Duas forças paralelas F~1 e F~2 de 1,5 kgf e 4,0 kgf respectivamente estão aplicadas em um corpo rígido em dois pontos: P1 e P2. O segmento P1 P2 forma com a direção das forças um ângulo de 60◦ e P1 P2 = 50 cm.
Determine a resultante e seu ponto de aplicação sobre P1 P2 . Veja Fig. 4.9.
7
u
O ponto Q precisa estar na mesma reta suporte da força aplicada em P? Por quê?
“ADT-MF” — 2005/11/7 — 8:51 — page 169 — #169
169
4.2. Composição de forças aplicada em um corpo rígido
Figura 4.9: Do Probl. 4.14.
Problema 4.15. Suponha que no problema anterior a força F~2 tenha sentido
contrário. Qual é a resultante?
Problema 4.16. No Probl. 4.15 a direção da resultante não tem nenhum ponto
de intersecção com o corpo, isto é, a resultante não terá nenhum ponto de
aplicação no corpo. Isso é possível? Como se explica esse fato?
Problema 4.17. No problema anterior a direção da resultante passa fora do
corpo, isto é, a resultante não terá ponto de aplicação em um ponto do corpo.
Isto é possível? Veja Fig. 4.10.
Figura 4.10: Do Probl. 4.17.
Resposta A ação conjunta das duas forças é equivalente a uma única força
~ atuando fora do corpo, como se o ponto de aplicação de R
~ estivesse
resultante R
ligado por uma haste fina e inflexível, sem peso, P1 Q. Mais adiante veremos
que, quando a resultante não passa pelo centro de massa do corpo, ela fará o
corpo:
1. deslocar-se como se estivesse aplicada no centro de massa;
2. girar em torno do centro de massa com movimento circular acelerado.
“ADT-MF” — 2005/11/7 — 8:51 — page 170 — #170
170
Capítulo 4. Estudo do corpo rígido
Problema 4.18. Demonstre que para se determinar a resultante de duas forças paralelas F~1 e F~2 aplicadas em pontos distintos P1 e P2 de um corpo
rígido, basta no ponto P1 de aplicação de F~1 traçar um segmento equipolente
a F~2 e no ponto P2 um segmento paralelo de mesmo comprimento que o segmento representativo de F~1 mas de sentido contrário, em seguida, ligando as
extremidades destes segmentos por uma reta s, determina-se a intersecção de
s com a reta P1 P2 . O ponto Q, assim determinado, é o ponto de aplicação da
~ Veja Fig. 4.11 e Fig. 4.12.
resultante R.
Figura 4.11: Do Probl. 4.18.
Figura 4.12: Do Probl. 4.18.
Resposta Observem-se as Figs. 4.11 e 4.12. Os triângulos P1 AQ e QBP2 são
semelhantes por construção, neste caso:
P1 A/P1 Q = P2 B/QP2 ,
mas P1 A = |F~2 | e P2 A = |F~1 |. Pondo, como antes, P1 P2 = a e P1 Q = b, vem:
QP2 = a−b, na Fig. 4.11, e QP2 = b−a, na Fig. 4.12. Segue-se que na Fig. 4.11
se tem:
P1 A
|F~2 |
P2 B
|F~1 |
=
, ou:
=
=
b
a−b
P1 Q
P2 Q
(a − b) |F~2 | = b |F~1 | ,
donde se tira que:
b=
|F~2 |
|F~1 | + |F~2 |
Analogamente, na Fig. 4.12 se vê que:
a.
|F~2 |
a.
|F~2 | − |F~1 |
Essas relações foram já obtidas anteriormente.
b=
“ADT-MF” — 2005/11/7 — 8:51 — page 171 — #171
4.3. Momento de uma força em relação a um eixo
Várias forças paralelas
Consideremos agora o caso de n forças paralelas atuando em um corpo rígido.
É óbvio que podemos aplicar o processo anterior somando os pares de forças paralelas, tantas vezes quantas necessárias para eliminar todas as n forças,
ficando apenas com uma única resultante. Mas esse processo é muito trabalhoso, vamos desenvolver um método que facilitará muito a obtenção da resultante. Para isso vamos estudar o momento de força.
4.3
Momento de uma força em relação a um eixo
Consideremos um corpo rígido preso a um eixo em torno do qual ele pode girar, uma viga de madeira por exemplo, constituindo uma cancela. Imaginemos
que a cancela esteja parada.
Verifica-se que será mais fácil girar a cancela aplicando forças mais afastadas do eixo de rotação; isto é, aplicando forças ao longo da viga nos pontos A,
B, C, D, E, F, veja Fig. 4.13, verifica-se que é mais fácil girar a viga se a força
está aplicada em F, sendo sua direção normal ao plano formado pela viga e
pelo eixo de rotação. Se aplicarmos uma força qualquer no ponto A sobre o
eixo, a viga não girará.
Figura 4.13: Força aplicada para girar um portão.
Vamos estudar esta propriedade que é “a tendência que a força provoca
para fazer girar seu ponto de aplicação em torno do eixo de rotação” ; indiquemos essa tendência pela letra M, e denominêmo-la de momento da força
F~ em relação ao eixo de rotação. Essa tendência de fazer girar seu ponto de
aplicação em torno do eixo é pois tanto maior quanto maior a distância do
171
“ADT-MF” — 2005/11/7 — 8:51 — page 172 — #172
172
Capítulo 4. Estudo do corpo rígido
ponto de aplicação ao eixo, mas também é fácil verificar por experimentação
que ela aumenta com a intensidade da força. O momento M da força é assim
uma função da distância d do ponto de aplicação da força ao eixo de rotação e
~ isto é, M = f (d, F).
~ O nosso objetivo neste parágrafo é descobrir a
da força F,
forma da função f e a expressão correta que melhor defina a grandeza M. Para
isso podemos inicialmente usar nossos conhecimentos preliminares e algumas
considerações simples. De fato, vejamos a Fig. 4.14, na qual se mostra a apli-
Figura 4.14: Força aplicada para girar
um portão?
Figura 4.15: Força aplicada para girar
um portão?
cação de uma força F~z , paralela ao eixo de rotação que indicamos por z. É fácil
perceber que:
1. Reconhecemos imediatamente que essa força não fará seu ponto de aplicação girar em torno do eixo, pois tende a deslocar P na sua direção e
sentido, isto é, paralelamente ao eixo z, no que é impedida pela reação
do eixo z por meio da “estrutura” formada pela viga e sua sustentação
que são os fios HP e GP (ver Fig. 4.14); invertendo-se o sentido de F~z ,
o resultado é o mesmo.
2. Reconhecemos também que uma força F~ x ao longo da direção da viga
(Fig. 4.15) não fará a barra girar em torno do eixo z, seja qual for seu
sentido, sendo equilibrada pelas reações do eixo.
3. A força F~y , normal ao plano formado pelo eixo e pelo ponto de aplicação
da força, é a que provoca o movimento de rotação em torno do eixo.
Segue-se que vamos considerar apenas essa força F~y .
Uma outra força qualquer F~ poderá sempre ser decomposta em três componentes (ortogonais, no presente caso) F~ x , F~y e F~z , e assim, aplicando o prin
“ADT-MF” — 2005/11/7 — 8:51 — page 173 — #173
4.3. Momento de uma força em relação a um eixo
cípio da superposição 8 , podemos dizer que o resultado da aplicação de F~ é o
mesmo resultado obtido aplicando-se separadamente cada uma das componentes F~ x , F~y , F~z e compondo-se ou somando-se os resultados; ora o resultado da
aplicação de F~ x e F~z são nulos, como se viu, logo a aplicação de F~ se reduz a
aplicação de F~y para efeito de rotações em torno do eixo z.
Para examinarmos mais facilmente o conceito de momento de uma força
em relação a um eixo, podemos desenvolvê-lo não no espaço mas no plano,
fazendo as considerações que seguem para não perder a generalidade.
Seja F~ uma força qualquer no espaço e um eixo z, vamos tomar um plano π
ortogonal ao eixo e decompor a força F~ em duas componentes: uma F~z , paralela ao eixo z, e a outra F~ 0 , projeção sobre o plano π. Pelo que já vimos, podemos dizer que o “o momento de F~ em relação ao eixo z será igual ao momento
de sua projeção F~ 0 sobre o plano π normal ao eixo”, pois o momento de sua
outra componente F~z , paralela ao eixo, é nulo. Desse modo, para estudarmos
o momento de uma força F~ qualquer em relação a um eixo z, basta estudarmos
o momento de sua projeção sobre o plano normal ao eixo. Ver Fig. 4.16.
~
Figura 4.16: Vista espacial da força F,
do eixo z e do plano π.
Figura 4.17: Vista do plano π da proje~
ção F~ 0 da força F.
Indiquemos por O o traço do eixo z sobre o plano π, e façamos o plano do
papel coincidir com o plano π, neste caso a figura se simplifica, veja Fig. 4.17;
o eixo z se reduz ao ponto O, a componente F~z , normal ao plano do papel não
precisa ser considerada, desse modo temos apenas de estudar o momento da
projeção F~ 0 que está aplicada em P. Seja então θ o ângulo que o segmento OP
~ indiquemos por a a distância OP. É claro
forma com a projeção F~ 0 da força F,
8
u O princípio da superposição de forças diz que as forças aplicadas em um ponto podem
ser substituídas por uma única força dada pela composição dessas forças segundo a regra do
paralelogramo.
173
“ADT-MF” — 2005/11/7 — 8:51 — page 174 — #174
174
Capítulo 4. Estudo do corpo rígido
que podemos repetir aqui o raciocínio feito anteriormente, decompondo
a força
F~ 0 em duas componentes, uma paralela a OP: F~1 tal que |F~1 | = |F~ 0 | cos(θ), e
outra normal a OP: F~2 tal que |F~2 | = |F~ 0 | sen(θ). Como já se viu, o efeito de F~1
é apenas de alterar a distância OP, no que é impedido pela reação do eixo, e
nenhum movimento de rotação resultará de sua ação. Já a componente F~2 tende
a fazer girar 9 P em torno de O. Podemos assim dizer que dada uma força F~ 0 ,
sobre um plano, seu momento em relação a um eixo z normal ao plano e que
passa pelo ponto O do plano é igual ao momento de sua componente F~2 normal
ao segmento definido pelo ponto O e o ponto de aplicação de F~ 0 , isto é, ao
−−→
momento da força de intensidade |F~ 0 | sen(θ), em que θ é o ângulo entre OP e
a força F~ 0 . Poderíamos fazer isso por meio da experiência conforme se explica
adiante (§4.3.1), mas para poupar esforços vamos dar aqui uma expressão para
o momento da força F~ 0 :
MF~ 0 = k a |F~ 0 | sen(θ) ,
em que o coeficiente k só depende das unidades de medição de |F~ 0 | e de a,
podemos fazê-lo igual a 1, definindo a unidade de momento como sendo a
unidade de comprimento vezes a unidade de intensidade de força, será pois
cm×gf, quando se usam essas unidades para comprimento e para intensidade
de força respectivamente. Desse modo:
M = a |F~ 0 | sen(θ) .
Para abreviar a linguagem, chamaremos M de momento de F~ 0 em relação ao
ponto O.
4.3.1
Verificação experimental
Tome-se o estojo de física e arme-se a estrutura como a da Fig. 4.18, em que A,
B e C são 3 pegadores e D é o ponteiro, cuja extremidade em C está atarraxada
a um anel, este anel articulado a uma pequena haste g, por sua vez atarraxada
no pegador em C. O ponteiro D preso ao anel deve ficar articulado em C, de
modo que ao afastarmos o ponteiro para a posição D0 e o soltarmos ele oscile
em torno da posição D, voltando para a posição de vertical equilíbrio. Veja
Fig. 4.18.
Desse modo, estando o ponteiro D articulado em C com atrito desprezível,
qualquer força f~ a ele aplicada, normal a ele e no plano vertical que o contém,
9
u
Ou ainda, tende a mudar a maneira como o ponto P gira em torno de O.
“ADT-MF” — 2005/11/7 — 8:51 — page 175 — #175
4.3. Momento de uma força em relação a um eixo
Figura 4.18: Esquema para montagem da experiência.
fa-lo-á desviar-se da posição de equilíbrio, fazendo-o girar em torno de O,
que é o centro do anel em C. Ora, se aplicarmos uma força no ponteiro, sua
posição de equilíbrio será como a indicada na Fig. 4.19. A força F~ 0 aplicada
Figura 4.19: Ponteiro em equilíbrio sujeito a três forças.
ao ponteiro é fornecida pelo dinamômetro L (intensidade) e pelo fio que o
interliga à haste (direção), e tende a fazer girar o ponteiro em torno de C no
sentido contrário aos ponteiros de um relógio colocado no plano da figura,
sentido esse considerado positivo; o sentido contrário sendo então negativo.
~ do ponteiro, atuando em seu “centro de gravidade”
Por outro lado, o peso P
(conceito que será estudado a seguir, §4.6) tenderá a fazer girar o ponteiro no
sentido negativo. As duas tendências se equilibram, por hipótese, na posição
da Fig. 4.19.
175
“ADT-MF” — 2005/11/7 — 8:51 — page 176 — #176
176
Capítulo 4. Estudo do corpo rígido
Figura 4.20: Ponteiro em equilíbrio sujeito a quatro forças.
É óbvio que havendo uma força F~ normal ao ponteiro e a ele aplicada,
sua posição de equilíbrio não poderá ser na posição vertical. Por quê? Logo,
se aplicarmos uma força F~i no ponteiro, para mantê-lo na posição a prumo de
equilíbrio, isto é, na posição de equilíbrio vertical, é necessário aplicar-lhe um
outra força F~ 0 , veja Fig. 4.20. 10
,→
Indiquemos o momento de F~i em relação ao ponto O por 11 M ~ e o de F~ 0
Fi
,→
por MF~ 0 , o símbolo ,→ sobre M indicando a tendência à rotação em torno do
eixo. Como as duas tendências se equilibram, pois o ponteiro permanece na
posição vertical de equilíbrio, é lícito considerar que esses,→momentos tem a o
mesmo valor numérico, os sinais sendo contrários: o de MF~i positivo, e o de
,→
MF~ 0 negativo; logo podemos pôr:
,→
,→
,→
,→
MF~i = −MF~ 0 , ou ainda: MF~i + MF~ 0 = 0 ,
que nos dará a condição de equilíbrio do ponteiro sob a ação dos dois momentos. 12 Esse fato nos dá uma idéia para a verificação da expressão numérica do
10
u Aqui se colocam as duas forças perpendicularmente à haste para que os erros experi
mentais sejam minimizados.
11
u Embora não se esteja indicando explicitamente, está subentendido que todos os mo
mentos estão sendo considerados em relação ao mesmo ponto.
12
u Note-se que o texto não faz referência às outras forças que atuam sobre o ponteiro.
~ e a força F~c que sustenta o ponteiro em C, que ainda é desconheTemos quatro forças: F~ 0 , F~i , P
cida e não a podemos ainda medir. A experiência proposta é sutil e muito sofisticada, porque
consegue filtrar efeitos que não se quer que apareçam no resultado da experiência. Quando se
calcula
os momentos dessas quatro forças em relação ao ponto O,→(centro do anel em C), tira-se
,→
que M F~c = 0; quando de coloca o ponteiro a prumo, provoca-se M P~ = 0. Desse modo, as únicas
“ADT-MF” — 2005/11/7 — 8:51 — page 177 — #177
177
4.3. Momento de uma força em relação a um eixo
Tabela 4.1: Verificação dos momentos de força, os valores até a 5a coluna devem ser
aproximadamente iguais ao produto: b |F~ 0 | .
|F~i |
|F~1 |
|F~2 |
|F~3 |
|F~4 |
|F~5 |
|F~6 |
|F~7 |
ai
a1
θi
◦
90
90◦
90◦
90◦
90◦
120◦
45◦
ai sen(θi )
|F~i | ai sen(θi )
ε%
a1 sen(θ1 )
|F~1 | a1 sen(θ1 )
ε%
momento. De fato, basta mantermos um dos momentos constantes e fazermos
variar o ponto de aplicação da força que produz o outro, por exemplo, façamos F~ 0 constante e normal ao ponteiro e a distância b constante, em tal caso
MF~ 0 = −b |F~ 0 |, constante; agora façamos variar F~i e ai , escolhendo 5 posições
diferentes (a1 , a2 , a3 , a4 , a5 ) do ponto de aplicação de F~ 0 com ângulos (θ1 , θ2 ,
θ3 , θ4 , θ5 ) iguais a 90◦ , e mais duas posições (a6 , a7 ) com ângulos θ6 = 120◦
e θ7 = 45◦ , diferentes portanto de 90◦ . Podemos construir uma tabela ou quadro de valores (planilha), como exemplificado na Tab. 4.1, para obter ai |F~i | e
MF~i = ai |F~i | sen(θi ), para i ∈ {1, 2, 3, 4, 5, 6, 7}; esses valores devem ser todos
aproximadamente iguais a b|F~ 0 | (erros entre 5 % e 1 %), uma vez que b e |F~ 0 |
são mantidos constantes em todos os ensaios. Veja Fig. 4.21 para montagem
com ângulo θi < 90◦ e Fig. 4.22 para montagem com ângulo θi > 90◦ .
Problema 4.19. Mostre o teorema de Varignon, enunciado a seguir.
Teorema 4.3.1 (Teorema de Varignon). A soma dos momentos de duas forças
F~1 e F~2 aplicadas em um ponto P em relação a um eixo (ponto O) é igual ao
~ = F~1 + F~2 em relação ao mesmo eixo (ponto O).
momento da resultante R
Prova. Sua demonstração é fácil, veja Fig. 4.23:
O momento de F~1
O momento de F~2
~
O momento de R
é
é
é
MF~1 = a |F~1 | sen(θ1 ) .
MF~2 = a |F~2 | sen(θ2 ) .
~ sen(θ) .
MR~ = a |R|
,→
forças que atuam na haste e que contribuem com momento não-nulo em relação a O são: M F~ 0 e
,→
M F~i .
“ADT-MF” — 2005/11/7 — 8:51 — page 178 — #178
178
Capítulo 4. Estudo do corpo rígido
Figura 4.21: Montagem com ângulo
θi < 90◦ .
Ora,
Figura 4.22: Montagem com ângulo
θi > 90◦ .
MF~1 + MF~2 = a |F~1 | sen(θ1 ) + |F~2 | sen(θ2 ) .
Mas |F~1 | sen(θ1 ) e |F~2 | sen(θ2 ) são as componentes (projeções) de F~1 e de F~2
Figura 4.23: Ilustrações para a demonstração do teorema de Varignon.
em relação a direção ortogonal a reta OP, e portanto sua soma deve ser igual
~ em relação a mesma direção, a qual é |R|
~ sen(θ),
a componente da resultante R
logo
~ sen(θ) ,
|F~1 | sen(θ1 ) + |F~2 | sen(θ2 ) = |R|
e neste caso:
~ sen(θ) = a |R|
~ sen(θ) = M ~ .
MF~1 + MF~2 = a |R|
R
“ADT-MF” — 2005/11/7 — 8:51 — page 179 — #179
4.3. Momento de uma força em relação a um eixo
Esse resultado é válido para n forcas aplicadas em um ponto, e também
para forças aplicadas em ponto de um corpo rígido. Se duas forças são reversas, isto é, se as duas retas suporte não se encontram em um ponto para onde
poderíamos deslocá-las, o resultado é obtido projetando-se ambas sobre um
plano normal ao eixo de rotação, os seus momentos sendo iguais ao de suas
projeções, as quais são coplanares, se elas não forem paralelas, encontram-se
num ponto e aí se segue o teorema. Se as duas forças forem paralelas, adicionase ao sistema das duas o sistema formado por duas forças de mesma direção,
módulos iguais e sentidos contrários, obtendo-se então duas forças concorrentes, e aí se aplica o teorema, o momento do sistema adicionado sendo nulo.
4.3.2
Outro modo de definir momento de força
Vimos que o significado do momento de uma força em relação a um ponto O
é a tendência que tem a força de fazer girar seu ponto de aplicação em torno
de O; vamos estudar outra maneira de exprimi-la, veja Fig. 4.24, onde temos
uma força F~ que faz um ângulo θ com a direção da reta definida pelos pontos
O e P, em que P,→é o ponto de aplicação de F~ e O é o ponto em relação ao qual
~
vamos calcular MF~ de F.
Figura 4.24: Outra forma de definir momento de força.
~ sen(θ), em que por a indicamos a distância OP.
Já vimos que: MF~ = a |F|
Podemos pôr:
~ sen(θ) = |F|
~ a sen(θ)
MF~ = a |F|
~ × h , sendo h = a sen(θ) ,
= |F|
~ Deste modo,
em que h é a distância do ponto O à reta suporte da força F.
~
podemos também definir o momento de F em relação ao ponto O como sendo
~ pela distância do ponto O a reta suporte da força F;
~ como
o produto de |F|
179
“ADT-MF” — 2005/11/7 — 8:51 — page 180 — #180
180
Capítulo 4. Estudo do corpo rígido
vemos pela Fig. 4.24, essa definição é equivalente a anterior, observe-se que
como a força F~ está aplicada em um corpo rígido, podemos deslocá-la ao longo
de sua reta suporte até o ponto P0 , que é o pé da perpendicular h baixada de O
~ e neste caso a definição deste parágrafo é idêntica a
sobre a reta suporte de F,
primeira definição que adotamos para momento de força.
4.4
Produto vetorial de dois vetores
4.4.1
Representação vetorial do momento de força
Já vimos que o momento de uma força tem um valor numérico
~ sen(θ)
M = a|F|
e um sentido, indicado sobre o plano pelo sinal positivo ou negativo, conforme
a tendência seja girar o corpo no sentido contrário ou a favor dos ponteiros de
um relógio colocado sobre o plano, respectivamente. A direção seria a direção
do eixo de rotação, trata-se pois de uma grandeza orientada; por outro lado, a
“soma” dos momentos de duas forças em relação a um eixo, sendo igual ao do
momento da resultante, mostra que essa soma goza de propriedade comutativa;
sendo assim é uma grandeza vetorial.
Essa grandeza vetorial terá a direção do eixo de rotação, seu valor numé~ sen(θ), e o sentido dos pés para a cabeça
rico (em módulo) sendo 13 M = a|F|
do observador colocado ao longo do eixo e que veria a rotação se processar de
sua direita para sua esquerda, este sentido sendo,→considerado positivo, e coincide com o de se considerar o vetor momento M como dirigido para fora do
plano quando o movimento de rotação fosse contrário ao do movimento dos
ponteiros do relógio sobre o plano. O sentido inverso, negativo, seria da cabeça
para os pés do observador colocado sobre o plano. No plano, representa-se um
vetor dirigido para fora do plano e ortogonal a ele por um círculo com um
ponto no centro: , e o vetor dirigido para dentro do plano ao longo de uma
sua perpendicular por um círculo com dois diâmetros cruzados em X: ⊗, ver
Fig. 4.25 e Fig. 4.26.
Convém exprimir o vetor momento através do vetor força F~ e do vetor que
−−→
expressa o segmento orientado OP, esse segmento exprimirá um deslocamento
(hipotético), podendo ser considerado um vetor 14 ; de fato, ver Fig. 4.27, se
13
u Como 0 ≤ θ ≤ π, o seno de θ será sempre não-negativo, não havendo necessidade de se
considerar o seu valor absoluto.
14
u O vetor posição do ponto P em relação ao ponto O.
“ADT-MF” — 2005/11/7 — 8:51 — page 181 — #181
4.4. Produto vetorial de dois vetores
Figura 4.25: Vetor normal emergindo de Figura 4.26: Vetor normal imergindo em
um plano.
um plano.
deslocarmos (hipoteticamente) um ponto P de uma origem O, de um segmento
~b, e em seguida de um outro segmento ~c, o resultado obtido é um deslocamento
~a = ~b+~c e tal que, se deslocarmos de ~c+~b, o resultado é o mesmo deslocamento
~a = ~b +~c = ~c + ~b, isto é, a “soma” (composição) de deslocamentos se efetua
pela regra do paralelogramo, sendo comutativa, logo um deslocamento é uma
grandeza vetorial quando se tem em conta essa lei de composição.
,→
−−→
~ um vetor, e o momento M também um
Desse modo,
OP =~a, um vetor, e F,
,→
~ em que f é uma função por meio da qual se obtém o
vetor, sendo M = f (~a, F),
Figura 4.27: Composição dos deslocamentos representados por ~b e ~c, compondo ~a.
181
“ADT-MF” — 2005/11/7 — 8:51 — page 182 — #182
182
Capítulo 4. Estudo do corpo rígido
,→
,→
vetor M a partir dos vetores ~a e F~ como sendo o vetor M ortogonal ao plano
~ de valor numérico: |~a| |F|
~ sen(θ), em que θ é o ângulo entre ~a e F,
~
de ~a e de F,
sendo dirigido dos pés para a cabeça do “observador colocado sobre o plano”
~
e tendo à sua direita o vetor ~a e à sua esquerda o vetor F.
Figura 4.28: O pólo O, o vetor posição ~a do ponto de aplicação da força F~ e o vetor
~a ∧ F~ emergindo da figura em O.
,→
O momento M será ,→
denominado produto
vetorial do vetor ~a pelo vetor F~
,→
~
~
e será simbolizado por M =~a ∧ F, ou M =~a × F, lendo-se “M igual a a vetor F”.
−−→
No caso do momento, o vetor ~a = OP faz com F~ um ângulo θ, não importando o fato de que o ponto de aplicação da força F~ seja a extremidade de
~a.
Observe-se que dessa definição resulta que
,→
M = ~a ∧ F~ = −F~ ∧ ~a ,
pois “o movimento de rotação” para “levar” F~ sobre ~a é contrário ao “movi~
mento de rotação” para “levar” ~a sobre F.
,→
,→
,→
~ = F~1 + F~2 , então M ~ = M ~ + M ~ ou
Como já vimos, se R
R
F1
F2
~ = ~a ∧ (F~1 + F~2 )
~a ∧ R
= ~a ∧ F~1 + ~a ∧ F~2 ,
o que mostra que o produto vetorial goza de propriedade distributiva em relação a adição de vetores, analogamente todas as propriedades algébricas são
satisfeitas pelo produto vetorial, de modo que as podemos usar com o produto
vetorial, executando-se a comutatividade do produto vetorial que não vale, uma
vez que ~a ∧ F~ , F~ ∧~a.
4.5
Composição de forças paralelas
Sejam n forças paralelas aplicadas em um corpo rígido C. 15 Para determinar
a resultante dessas forças paralelas temos um sistema de eixos coordenados
15
u
Estaremos estudando o caso de uma lâmina plana rígida.
“ADT-MF” — 2005/11/7 — 8:51 — page 183 — #183
183
4.5. Composição de forças paralelas
Oxyz, e tal que o eixo Ox seja ortogonal à direção das forças paralelas. Veja a
Fig. 4.29. Já vimos que a soma dos momentos dessas forças em relação ao eixo
~ = F~1 + F~2 + F~3 + F~4 em relação ao
Ox será igual ao momento de sua resultante R
mesmo eixo (estamos exemplificando o caso de 4 forças paralelas, conforme
indicado na Fig. 4.29).
Figura 4.29: Forças paralelas aplicadas em um corpo rígido, tendo-se adotado um
sistema de coordenadas para o qual os eixos Ox e Oy definem um plano paralelo às
forças, sendo Ox perpendicular às forças paralelas.
Se os pontos de aplicação das n forças têm abscissas x1 , x2 . . . xn , respectivamente, então a distância dessas forças (paralelas) ao eixo Oz (ponto O) será
dada pela própria abscissas, desse modo 16 :
M1 = x1 F1 , M2 = x2 F2 , . . . , Mn = xn Fn ,
~ seja x̄, então x̄R = M ~ ,
e, supondo que a abscissa do ponto de aplicação de R
R
17
e, pelo teorema de Varignon:
MR~ =
x̄R =
n
X
i=1
n
X
Mi
xi Fi , daí
i=1
n
X
x̄ =
n
X
xi Fi
i=1
R
=
xi Fi
i=1
n
X
.
Fi
i=1
,→
Observe-se que se está usando a seguinte notação: M i = Mi k̂ , ~ai = xi ı̂+yi ̂ e F~i = Fi ̂ .
17
~ mas, no presente caso: R
~ = R ̂ , portanto não se está
Note-se que R não é o vetor R,
“dividindo por vetor”, mas pelo escalar projeção.
16
u
u
“ADT-MF” — 2005/11/7 — 8:51 — page 184 — #184
184
Capítulo 4. Estudo do corpo rígido
Observe-se que as forças aplicadas em um corpo rígido se comportam como
vetores correntes (deslizantes), deste modo poderíamos deslocá-las para a intersecção do eixo Ox coma suas retas suporte, veja Fig. 4.30.
Figura 4.30: Forças paralelas aplicadas no corpo rígido consideradas como vetores
deslizantes.
4.5.1
Problema exemplo
Nas Fig. 4.29 e Fig. 4.30 as forças paralelas têm todas o mesmo sentido, mas
podem ter sentidos diferentes. Vejamos por exemplo o caso da Fig. 4.31 em que
temos 5 forças paralelas aplicadas a um corpo rígido, sendo F~2 e F~4 de sentido
contrário ao positivo do eixo e as outras de sentido contrário. Para fixar idéias,
suponhamos que
F~1
F~2
F~3
F~4
F~5
= (+6 gf) ̂
= (−5 gf) ̂
= (+7 gf) ̂
= (−3 gf) ̂
= (+4 gf) ̂
⇒
⇒
⇒
⇒
⇒
F1
F2
F3
F4
F5
= +6 gf,
= −5 gf,
= +7 gf,
= −3 gf,
= +4 gf.
Sendo as distâncias entre as retas suporte de: F~1 e F~2 igual a 1 cm; F~2 e F~3
igual a 3 cm; F~3 e F~4 igual a 2 cm; F~4 e F~5 igual a 3 cm.
Por conveniência escolhemos um sistema de coordenadas tal que o eixo Oy
seja paralelo às forças (que ficam paralelas ao versor ̂), mas, como a escolha
do sistema de coordenadas é arbitrária, podemos considerar que o eixo Oy dista
1 cm do ponto de aplicação da força F~1 . Dessa forma, as abscissas dos pontos
de aplicação das forças são: 1 cm, 2 cm, 5 cm, 7 cm, 10 cm, respectivamente.
“ADT-MF” — 2005/11/7 — 8:51 — page 185 — #185
185
4.5. Composição de forças paralelas
Figura 4.31: Forças paralelas com sentidos não necessariamente iguais.
Tomemos os momentos das forças em relação ao ponto O, origem dos
eixos coordenados, o sentido a favor dos ponteiros do relógio colocado sobre
o plano, sendo negativo e o outro, positivo, de acordo com a convenção. Nesse
caso:
M1 = x1 F1 = +1 cm × 6 gf = 6 cm gf ,
M2 = x2 F2 = −2 cm × 5 gf = −10 cm gf ,
M3 = x3 F3 = +5 cm × 7 gf = 35 cm gf ,
M4 = x4 F4 = −7 cm × 3 gf = −21 cm gf ,
M5 = x5 F5 = +10 cm × 4 gf = 40 cm gf .
Donde:
M = M1 + M2 + M3 + M4 + M5
= (6 − 10 + 35 − 21 + 40) cm gf = (81 − 31) cm gf
= 50 cm gf .
Por outro lado:
R=
5
X
Fi = (6 − 5 + 7 − 3 + 4) gf = (17 − 8) gf = 9 gf .
i=1
Logo
x̄R =
5
X
i=1
xi Fi = 50 cm gf .
“ADT-MF” — 2005/11/7 — 8:51 — page 186 — #186
186
Capítulo 4. Estudo do corpo rígido
De onde tiramos a abscissa do ponto de aplicação da resultante, que caracte~
riza, neste caso, a reta suporte de R:
P
xi Fi 50 cm gf
x̄ =
=
R
9 gf
= 5,55 cm .
O resultado obtido mostra que a resultante deverá ser aplicada em ponto de
abscissa x = x̄ = 5,55 cm, tendo o mesmo sentido positivo do do eixo Oy e
intensidade igual a 9 gf.
Observação O estudante deve ficar satisfeito de ver no problema anterior
que o sinal positivo ou negativo do momento da força F~i = Fi ̂ em relação
ao ponto O sai automaticamente do produto da abscissa xi pela projeção Fi .
Observe-se ainda que o momento de cada uma dessas forças paralelas, inclusive dessa resultante, não dependem da posição do eixo Ox.
4.5.2
Outro exemplo
Têm-se quatro forças paralelas (ver Fig. 4.32) que, em termos de um sistema
de coordenadas xOy tal que Oy é paralelo às forças, são F~i = Fyi ̂ tais que
Fy1 = 5 gf,
Fy2 = −5 gf,
Fy3 = 5 gf,
Fy4 = 3 gf,
x3 = −8 cm,
x4 = 10 cm,
aplicadas nos pontos de abscissas
x1 = 2 cm,
x2 = −4 cm,
respectivamente. Calcule a resultante dessas forças e sua reta suporte.
Solução
~ = R ̂ , então
Da resultante Como R
R=
4
X
Fyα = 5 gf − 5 gf + 5 gf − 3 gf = 2 gf ,
α=1
~ = (2 gf) ̂ . Como R > 0, a resultante é dirigida para cima.
portanto R
“ADT-MF” — 2005/11/7 — 8:51 — page 187 — #187
187
4.5. Composição de forças paralelas
Figura 4.32: Forças paralelas com sentidos não necessariamente iguais,
outro exemplo.
Do momento (Afinal, para que se saiba a reta suporte do ponto de aplicação da
resultante é preciso lançar mão dos momentos das forças em relação a um mesmo pólo
qualquer, estaremos considerando esse pólo na origem do sistema de coordenadas):
MFy1
MFy2
MFy3
MFy4
M Ry
=
5 gf × 2 cm
= −5 gf × (−4) cm
=
5 gf × (−8) cm
= −3 gf × 10 cm
P4
=
α=1 MFyα
=
10 gf cm
=
20 gf cm
= −40 gf cm
= −30 gf cm
= −40 gf cm .
(4.2)
Observe-se que os sinais dos momentos dados pelos produtos em (4.2) estão de
acordo com a convenção do sinal do momento obtido pela regra dos ponteiros
do relógio sobre o plano.
Dessa forma, como MR = MRy e x̄R = MR ,
M −40 gf cm
=
R
2 gf
= −20 cm .
x̄ =
Portanto, a resultante é uma força cuja intensidade igual a 2 gf no sentido do
eixo Oy (Ry > 0) com ponto de aplicação sobre a reta suporte que corta o eixo
dos x no ponto de abscissa x̄ = −20 cm. Como tal, seu momento é negativo, de
acordo com a convenção usual.
Vejamos porém o seguinte exemplo envolvendo forças paralelas, quando
escolhemos os eixos coordenados de tal maneira que o eixo Ox é paralelo às
forças. 18
18
u
Note-se que as forças não são necessariamente horizontais ou verticais, embora as
“ADT-MF” — 2005/11/7 — 8:51 — page 188 — #188
188
Capítulo 4. Estudo do corpo rígido
Figura 4.33: Forças paralelas com sentidos não necessariamente iguais.
4.5.3
Mais um exemplo
Têm-se quatro forças paralelas (ver Fig. 4.33) que, em termos do sistema de
coordenadas xOy tal que Ox é paralelo às forças, são F~` = F x` ı̂ tais que
F x1 = +5 gf,
F x2 = +4 gf,
F x3 = −3 gf,
F x4 = −5 gf
estão aplicados nos pontos de ordenadas
y1 = 2 cm,
y2 = −5 cm,
y3 = 5 cm,
y4 = −4 cm,
sendo forças aplicadas num corpo rígido e paralelas ao eixo Ox. A resultante
será:
4
4
4
X
X
X
~=
R
F~α =
ı̂
F xα
{F xα ı̂} =
α=1
α=1
α=1
= 5 gf + 4 gf − 3 gf − 5 gf ı̂
= 1 gf ı̂ .
O momentos (em relação à origem), obtidos pela multiplicação das ordenadas
pelas projeções das forças sobre o eixo Ox, serão:
MF x1
MF x2
MF x3
MF x4
= (+5) gf × (+2) cm = +10 gf cm;
= (+4) gf × (−5) cm = −20 gf cm;
= (−3) gf × (+5) cm = −15 gf cm;
= (−5) gf × (−4) cm = +20 gf cm.
(4.3)
estejamos representado graficamente assim; é interessante que se tenha em mente que as forças
consideradas neste parágrafo são coplanares e paralelas e que a figura que as representam pode
estar girada.
“ADT-MF” — 2005/11/7 — 8:51 — page 189 — #189
4.5. Composição de forças paralelas
Cujos sinais são exatamente contrários aos obtidos pela convenção do relógio,
que não pode estar errada pois dá o sentido do possível movimento de rotação
(a partir do repouso). O erro deve estar pois nos produtos das ordenadas pelas
projeções das forças. Onde está o erro?
Trocando os sinais dos momentos achados em (4.3) e somando, vem:
MR =
4
X
MF` = (−10 + 20 + 15 − 20) gf cm = 5 gf cm
`=1
e
ȳ =
MR 5 gf cm
=
= 5 cm.
R
1 gf
Se o estudante se der ao trabalho de somar duas a duas as forças, verá que esse
é o resultado.
Vejamos agora a causa do erro apontado anteriormente.
O erro reside no fato de que o momento de uma força é obtido de modo
correto pelo produto vetorial do vetor posição ~a (em relação
ao pólo) do ponto
,→
~
~
~ Para exprimir
onde está aplicada a força F, pela força F, isto é, M = ~a ∧ F.
esse produto vetorial não podemos simplesmente multiplicar as ordenadas do
ponto de aplicação das forças pelas componentes da força, como se fez antes
de apontar o erro, o que pode originar erros como os observados anteriormente.
Para tratar o problema adequadamente com o sistema de eixos coordenados,
vejamos alguns resultados do cálculo vetorial.
No sistema triortogonal cartesiano podemos indicar um vetor do seguinte
modo:
~ veja Fig. 4.34, projeta-se
. Dado o segmento representativo do vetor A,
(ortogonalmente) esse segmento sobre os três eixos coordenados. Essas
projeções são obtidas tomando-se os planos paralelos aos planos coordenados (i.e., ao planos Oxy, Oxz e Oyz) e que se cortam nas extremidades
do segmento representativo do vetor (6 planos). Tais planos vão deter~ x = A x ı̂, A
~y = Ay ̂ e
minar dois a dois sobre os eixos os segmentos A
~z = Az k̂, que medidos com a escala unitária sobre os eixos fornecem
A
três números : A x , Ay e A x : a esses números se dá o sinal positivo se: o
~ x correspondente a projeção sobre o eixo Ox do
segmento orientado A
~
segmento orientado A tiver o mesmo sentido que o do eixo Ox; analoga~ poderá ser expresso por essas
mente para as outras projeções. O vetor A
189
“ADT-MF” — 2005/11/7 — 8:51 — page 190 — #190
190
Capítulo 4. Estudo do corpo rígido
~ no sistema triortogonal xyz.
Figura 4.34: Projeções ortogonais do vetor A
projeções algébricas, i.e., pela terna das projeções algébricas: 19
~ = (A x , Ay , Az ) .
A
Notando-se a convenção relativamente ao sinal dessas projeções.
Pode-se também exprimir a componente algébrica (o segmento de reta orientado) sobre cada eixo do seguinte modo:
. Sobre os três eixos coordenados definem-se três versores (vetores de
módulo unitário) e que têm as direções e sentidos dos eixos coordenados,
assim, sobre o eixo Ox se define o versor ı̂, de módulo 1 (i.e., |ı̂| = 1),
direção e sentido do eixo 20 Ox. Analogamente, sobre o eixo Oy, o versor
correspondente será indicado por ̂ e sobre Oz pelo símbolo k̂, veja Fig. 4.35. Desse modo:
~ = A x ı̂ + Ay ̂ + Az k̂ .
A
Se, por exemplo, A x = −3, negativa, então A x ı̂ = −3ı̂ significa um segmento sobre o eixo dos x, de comprimento 3 vezes a unidade de com19
u Esclarecemos nessa oportunidade a distinção que estamos fazendo nesta revisão entre
~ x , ou “a componente algébrica (vetorial)” A
~ x e a projeção A x ; analo“o vetor componente” A
~y e Ay , e A
~z e Az . A componente (algébrica) de um vetor será sempre um vetor
gamente para A
com a direção considerada; a projeção será elemento do corpo (um número), dessa forma, para
~ x = Ax
o exemplo do eixo Ox: A
ı̂ .
|{z}
|{z} |{z}
componente
20
projeção versor
Para exprimir que ı̂ é um versor costuma-se representar seu sentido (na direção
considerada) por um acento circunflexo ˆ.
“ADT-MF” — 2005/11/7 — 8:51 — page 191 — #191
4.5. Composição de forças paralelas
~ no sistema triortogonal xyz.
Figura 4.35: Projeções ortogonais do vetor A
191
“ADT-MF” — 2005/11/7 — 8:51 — page 192 — #192
192
Capítulo 4. Estudo do corpo rígido
primento sobre o eixo Ox e de sentido contrário ao de ı̂, logo ao do eixo
Ox. Analogamente para as outras projeções e componentes.
4.5.4
Produto vetorial
Vejamos agora o produto vetorial dos versores ı̂, ̂, k̂. É fácil ver, de acordo
com a definição de produto vetorial (cf. §4.3.2, pág. 182), que: 21
ı̂ ∧ ı̂ = ~0 ;
ı̂ ∧ ̂ = k̂ ;
ı̂ ∧ k̂ = − ̂ ;
̂ ∧ ı̂ = − k̂ ;
̂ ∧ ̂ = ~0 ;
̂ ∧ k̂ = ı̂ ;
k̂ ∧ ı̂ = ̂ ;
k̂ ∧ ̂ = −ı̂ ;
k̂ ∧ k̂ = ~0 .
Voltemos agora ao nosso exemplo de forças no plano OXY.
Suponhamos pois um vetor no plano Oxy, por exemplo, uma força F~ tal
que:
F~ = F x ı̂ + Fy ̂ + 0 k̂ = F x ı̂ + Fy ̂ ,
e que o vetor posição do ponto de aplicação de F~ seja ~a = xı̂ + y ̂ + 0 k̂ (em
relação à origem do sistema de coordenadas).
O momento dessa força F~ em relação ao pólo O (origem) será dado pelo
produto vetorial
~a ∧ F~ = (xı̂ + y ̂) ∧ (F x ı̂ + Fy ̂) .
O produto vetorial, como já se viu (pág. 182 do §4.3.2), goza das seguintes
propriedades algébricas:
. anticomutativa:
~a ∧ F~ = −F~ ∧ ~a, portanto ~a ∧ F~ , F~ ∧ ~a ;
. distributiva em relação à adição de vetores:
~a ∧ (F~1 + F~2 ) = ~a ∧ F~1 + ~a ∧ F~2 .
Portanto, tendo em vista essas propriedades,
~a ∧ F~ = xı̂ + y ̂ ∧ F x ı̂ + xı̂ + y ̂ ∧ Fy ̂
= x ı̂ ∧ F x ı̂ + y ̂ ∧ F x ı̂ + x ı̂ ∧ Fy ̂ + y ̂ ∧ Fy ̂
= xF x ı̂ ∧ ı̂ + yF x ̂ ∧ ı̂ + xFy ı̂ ∧ ̂ + yFy ̂ ∧ ̂
= xF x ~0 + yF x − k̂ + xFy k̂ + yFy ~0
= xFy k̂ − yF x k̂ .
21
u Note-se que essas relações significam que os vetores ı̂, ̂ e k̂ possuem módulo igual a
1, são dois a dois ortogonais e definem um triedro direto na ordem cíclica (ı̂ ̂ k̂).
“ADT-MF” — 2005/11/7 — 8:51 — page 193 — #193
4.5. Composição de forças paralelas
Ora, observemos agora as duas últimas parcelas.
. A primeira parcela, (xFy ) k̂, terá o sentido (positivo) do eixo Oz se x e
Fy forem ambos positivos, ou se x e Fy forem ambos negativos, mas se
esses fatores tiverem sinais diferentes, o produto (xFy ) será negativo e a
parcela (xFy ) k̂ terá sentido oposto (negativo) ao do sentido do eixo Oz,
ou do versor k̂; foi o que se viu no primeiro exemplo (§4.5.1, pág. 184).
. A segunda parcela, (−yF x ) k̂, terá, entretanto, o sentido oposto (negativo) do eixo Oz se y e F x tiverem o mesmo sinal, mas se esses fatores tiverem sinais diferentes, a parcela (−yF x ) k̂ terá o mesmo sentido
versor k̂; exatamente o caso obtido no exemplo do §4.5.3 (pág. 188),
tudo porque o produto vetorial de (y ̂) por (F x ı̂), nessa ordem, isto é,
y ̂ ∧ F x ı̂ = yF x ̂ ∧ ı̂ = −yF x k̂ tem sentido contrário ao do vetor obtido
pelo produto de yF x pelo versor k̂; no entanto, o sinal de (xFy−yF x ) coincide com o sinal obtido diretamente do conceito de momento de força
em relação ao ponto (pólo) O.
O resultado obtido pode ser expresso portanto do seguinte modo:
~a ∧ F~ = (xFy − yF x ) k̂ .
Como as forças F~ x e F~y jazem no plano Oxy, o momento ~a ∧ (F x ı̂+ Fy ̂)
dessas forças em relação a origem será ortogonal ao plano Oxy, i.e., 22 terá a
direção do eixo Oz ; o seu sentido dependerá do sinal da soma (xFy−yF x ) = Mz ,
,→
em que por Mz se indica a projeção do vetor M relativamente ao eixo Oz, as
outras projeções (My e Mz ) sendo, neste caso, identicamente nulas (porque?).
Analogamente, se as forças jazem no plano Oxz, isto é, se as forças podem
ser expressas como F~2 = F x ı̂+ Fz k̂ = (F x , 0, Fz ), sendo o raio vetor do ponto
de aplicação da força em relação ao ponto O da forma: ~a2 = xı̂+
z k̂, então o
,→
momento dessas forças em relação ao ponto O (eixo Oy) será M = My ̂, tal
que
My = (xı̂ + z k̂) ∧ (F x ı̂ + Fz k̂)
= (xF x )ı̂ ∧ ı̂ + (xFz )ı̂ ∧ k̂ + (zF x ) k̂ ∧ ı̂ + (zFz ) k̂ ∧ k̂
= ~0 + (xFz ){− ̂} + (zF x ){+ ̂} + ~0
= (zF x − xFz ) ̂ ,
22
u Sendo ~a = xı̂+ y ̂ o vetor posição do ponto de aplicação da força no plano Oxy em
relação à origem.
193
“ADT-MF” — 2005/11/7 — 8:51 — page 194 — #194
194
Capítulo 4. Estudo do corpo rígido
as outras componentes sendo identicamente nulas.
E ainda, se as forças jazem no plano Oyz, isto é, quando as forças podem
ser expressas como F~3 = Fy ̂ + Fz k̂ = (0, Fy , Fz ), sendo o raio vetor do ponto
de aplicação da força em relação ao ponto O da forma: ~a3 =,→y ̂ + z k̂, então o
momento dessas forças em relação ao pólo O (eixo Ox), será M = M x ı̂, tal que
M x = (y ̂ + z k̂) ∧ (Fy ̂ + Fz k̂)
= (yFy ) ̂ ∧ ̂ + (yFz ) ̂ ∧ k̂ + (zFy ) k̂ ∧ ̂ + (zFz ) k̂ ∧ k̂
= ~0 + (yFz ){+ı̂} + (zFy ){−ı̂} + ~0
= (yFz − zFy )ı̂ ,
as outras componentes sendo identicamente nulas.
Figura 4.36: Momento de uma força genérica no espaço.
O caso geral do momento de uma força F~ no espaço em relação ao pólo
O, como indica a Fig. 4.36, sendo ~r = xı̂+y ̂+z k̂ o vetor posição do ponto de
aplicação da força F~ = F x ı̂+Fy ̂+Fz k̂, será:
,→
~ = ~r ∧ F~ = (xı̂+y ̂+z k̂) ∧ (F x ı̂+Fy ̂+Fz k̂) .
MO (~r, F)
O estudante poderá mostrar que esse produto vetorial é igual a
,→
M = (yFz − zFy )ı̂ + (zF x − xFz ) ̂ + (xFy − yF x ) k̂
(4.4)
= M x ı̂ + My ̂ + Mz k̂ .
,→
Cada uma das componentes (M x ı̂, My ̂ e Mz k̂) de M é facilmente reconhecida
como o momento da projeção sobre um dos planos coordenados (Oxy, Oxz e
“ADT-MF” — 2005/11/7 — 8:51 — page 195 — #195
4.5. Composição de forças paralelas
Oyz) em relação ao respectivo eixo ortogonal (Oz, Oy e Ox, respectivamente),
a soma (composição) desses três momentos (componentes) dando o momento
da força F~ em relação ao eixo ortogonal a ~r e a F~ e que passa pelo pólo O.
No estudo da Mecânica Física, como só tratamos de forças que jazem no
plano Oxy, só haverá a componente Mz k̂ do momento dessas forças, correspondendo à projeção Mz , as outras componentes sendo identicamente nulas,
pois, por exemplo:
My = zF x − xFz = 0 × F x − x × 0 ≡ 0 ,
que é uma identidade; analogamente para M x (verifique).
O estudante que conhece determinantes pode verificar por meio de (4.4)
que o produto vetorial
,→
M = ~r ∧ F~ = (xı̂ + y ̂ + z k̂) ∧ (F x ı̂ + Fy ̂ + Fz k̂)
pode ser posto sob a forma:
ı̂
̂ k̂
~r ∧ F~ = x y
z .
F x Fy Fz
Expressão muito cômoda para fixar na memória e que dá o produto vetorial
de dois vetores, expresso num sistema de coordenadas triortogonal cartesiano
direto (i.e., tal que k̂ = ı̂∧ ĵ ), em função das componentes dos vetores nesse
sistema.
Exercícios
Exercício 4.1. Duas forças, F~1 e F~2 , estão aplicadas nos pontos P1 e P2 de um
corpo rígido fixado a um eixo Oz. Veja Fig. 4.37. As forças jazem num plano
ortogonal ao eixo Oz. Os vetores posição dos pontos P1 e P2 têm módulos
|~a1 | = 20 cm e |~a2 | = 15 cm, o ângulo que o eixo Ox forma com ~a1 é θ1 = 30◦ ,
e o ângulo que ~a2 forma com o mesmo eixo é θ2 = −30◦ . O ângulo de ~a1 com
F~1 é ϕ1 = 23◦ , e o ângulo de ~a2 com F~2 é ϕ2 = −30◦ . Se a intensidade de F~1
é |F~1 | = 20 gf, e a de F~2 é |F~2 | = 30 gf, qual é o momento dessas,→forças sobre
o corpo em relação ao eixo Oz? O movimento provocado por M (a partir de
uma situação de repouso) é a favor ou contrário ao movimento dos ponteiros
do relógio colocado sobre o plano (com o mostrador voltado para o sentido
positivo do eixo Oz)? (negativo ou positivo?)
195
“ADT-MF” — 2005/11/7 — 8:51 — page 196 — #196
196
Capítulo 4. Estudo do corpo rígido
1,→a solução – Cálculo direto dos momentos das forças Usando a notação
M = M k̂
θ sen(θ) cos(θ)
23◦ 0,30
0,92
30◦ 0,50
0,87
◦
37
0,60
0,80
◦
45
0,70
0,71
53◦ 0,80
0,60
◦
60
0,87
0,50
MF~1 = |~a1 | |F~1 | sen(θ1 )
= (20 × 20 × sen(23◦ )) cm gf
= (400 × 0,39) cm gf = +156 cm gf
MF~2 = |~a2 | |F~2 | sen(θ2 )
= (15 × 30 × sen(−30◦ )) cm gf
= (−450 × 0,5) cm gf = −225 cm gf
M = MF~1 + MF~2 = (156 − 225) cm gf
= −69 cm gf.
Movimento a favor dos ponteiros do relógio colocado sobre o plano.
Figura 4.37: Ilustração para o exercício 4.1.
Nota Determine a resultante de F~1 e F~2 e calcule o momento dessa resultante em relação a O e veja se o resultado coincide com o anterior (teorema
de Varignon). Faça a solução gráfica.
2a solução – Método gráfico A Fig. 4.38 está em escala, como indicado, e
mostra a solução gráfica do problema, medido diretamente da figura, obtemos:
. Medida dos ângulos com o transferidor: ϕ = 21◦ ; ψ = 15◦ ; α = 6◦ .
~ = 28,8 gf ; |F~n | = 7,5 gf .
. Medida das forças com a régua: |R|
. Medida da distância de O à intersecção das retas suporte de F~1 e F~2 :
|~a| = 9 cm.
“ADT-MF” — 2005/11/7 — 8:51 — page 197 — #197
4.5. Composição de forças paralelas
Figura 4.38: A distância h1 da reta suporte de F~1 ao ponto O não é mostrada na figura.
. Cálculo do momento da resultante: M = |~a| |F~n | = 67,5 cm gf.
Observação No gráfico fizemos as forças deslizar para o ponto comum
das suas retas suporte, indicado na figura por P. O eixo Oy não é essencial à
solução do problema, o eixo Ox é importante apenas porque o usamos para
os dados do problema, o que poderia ser contornado se déssemos ϕ1 − ϕ2 ,
|~a1 | e |~a2 |, deixando a escolha dos eixos para escolha arbitrária de quem fosse
resolver o problema.
O cálculo do momento resultante também pode ser efetuado por meio da
expressão:
~ sen(ψ),
M = |~a| |R|
donde:
M = (9 cm) (28,8 gf) sen(15◦ ) = (25,92 × 0,26) cm gf = 67,4 cm gf .
O cálculo do momento resultante ainda pode ser efetuado pela soma das componentes. As distâncias h1 e h2 das retas suporte de F~1 e F~2 respectivamente
197
“ADT-MF” — 2005/11/7 — 8:51 — page 198 — #198
198
Capítulo 4. Estudo do corpo rígido
ao ponto O são: h1 = 8 cm e h2 = 7,7 cm, desse modo, temos:
M1 = +h1 |F~1 | = 8 cm × 20 gf = 160 cm gf,
M2 = −h2 |F~2 | = −7,7 cm × 30 gf = −71 cm gf.
Donde: M = M1 + M2 = (160−231) cm gf = −71 cm gf. Discrepância inferior a
6 % em relação ao cálculo com as medidas para |~a| e |F~n |.
3a solução – Método analítico Obtenção das componentes das forças em
relação aos eixos cartesianos ortogonais Oxy, em que Ox coincide com o eixo
Ox dado e Oy lhe é ortogonal e dirigido positivamente.
~ =G x ı̂+Gy ̂ para a grandeza vetorial G
~ representada em
Usando a notação G
termos dos versores ı̂ e ̂ associados ao sistema de coordenadas Oxy, temos:
F1x = |F~1 | cos(+23◦ +30◦ ) = |F~1 | cos +53◦ = +(20,0 gf) 0,60 = +12,0 gf
F1y = |F~1 | sen(+23◦ +30◦ ) = |F~1 | sen +53◦ = +(20,0 gf) 0,80 = +16,0 gf
F2x = |F~2 | cos(−30◦ −30◦ ) = |F~2 | cos −60◦ = +(30,0 gf) 0,50 = +15,0 gf
F2y = |F~2 | sen(−30◦ −30◦ ) = |F~2 | sen −60◦ = −(30,0 gf) 0,80 = −25,98 gf
= −26,0 gf
a1x = x1 = |~a1 | cos +30◦ = +(20,0 cm)×0,87 = +17,32 cm = +17,3 cm
a1y = y1 = |~a1 | sen +30◦ = +(20,0 cm)×0,50 = +10,0 cm = +10,0 cm
a2x = x2 = |~a2 | cos −30◦ = +(15,0 cm)×0,87 = +12,99 cm = +13,0 cm
a2y = y2 = |~a2 | sen −30◦ = −(15,0 cm)×0,50 = −7,5 cm = −7,5 cm
,→
MF~1 = (x1 F1y − y1 F1y ) k̂
= (17,3)×(+16,0) − (+10,0)×(+12,0) cm gf k̂
= (276,8 − 120,0) cm gf k̂ = (156,8 cm gf) k̂
,→
MF~2 = (x2 F2y − y2 F2y ) k̂
= (+13,3)×(−26,0) − (−7,5)×(+15,0) cm gf k̂
= (−338,0 + 122,5) cm gf k̂ = (−225,0 cm gf) k̂
,→
,→
MR~ = MF~1 + MF~2 = (156,8 − 225,5) cm gf k̂ = −68,5 cm gf k̂ .
,→
Esse valor é praticamente o mesmo que o achado pelos outros dois métodos.
“ADT-MF” — 2005/11/7 — 8:51 — page 199 — #199
199
4.5. Composição de forças paralelas
Achemos a resultante e seu momento:
R x = F1x + F2x = (12,4 + 10,0) gf = +24,4 gf
Ry = F1y + F2y = (16,0 − 26,0) gf = −10,0 gf
portanto
~ = (24,4 gf)ı̂ + (−10,0 gf) ̂ .
R
~ é tal que: 23
O ângulo que o eixo dos x forma com R
tan(ϕ) =
Fy −10,0 gf
=
= −0,37 ⇒ ϕ = −20◦ 190 ,
Fx
27,4 gf
(4.5)
assim, sen(ϕ) = −0,347 e cos(ϕ) = 0,938.
~ é o ponto comum às (a intersecção
O ponto de aplicação da resultante R
~
~
das) retas suporte das forças F1 e F2 , determinemos as equações dessas retas:
1. Reta suporte da força F~1 :
y − y1
= tan(α1 ) = tan(53◦ ) = 1,33 ,
x − x1
onde: α1 = ψ1 + 30◦ e (x1 ; y1 ) = (17,3 cm; 16,0 cm) , donde:
y − (10,0 cm) = x − (17,3 cm) × 1,33
y = 1,33 x − 17,3 × 1,33 cm + (10,0 cm)
y = 1,33 x − 13,14 cm .
2. Reta suporte da força F~2 :
y − y2
= tan(α2 ) = tan(−60◦ ) = −1,73 ,
x − x2
onde: α2 = ϕ2 −30◦ e (x2 ; y2 ) = (13,0 cm; −7,5 cm), donde:
23
u Note-se que constam na fração as projeções, não os componentes. A divisão por vetor
é uma operação que não se define, ou seja, não há uma definição de produto entre vetores que
propicie inverso multiplicativo.
“ADT-MF” — 2005/11/7 — 8:51 — page 200 — #200
200
Capítulo 4. Estudo do corpo rígido
y − (−7,5 cm) + x − (13,0 cm) × (−1,73)
y = −1,73 x + 13,0 × 1,73 cm + (−7,5 cm)
y = −1,73 x − 15,10 cm .
Intersecção das retas suporte:
1,33 x − 13,142 = −1,73 x + 15,10
1,33 x + 1,73 x = 15,10 + 13,142
3,06 x = 18,242
x = 9,223 cm .
Substituindo na equação da 1a reta:
y = 1,33 × 9,233 − 13,142 = 12,266 = 13,142
y = −0,876 cm .
~ é pois
O ponto de aplicação da resultante R
( x̄; ȳ) = (9,22 cm; −0,88 cm) .
~ em relação ao ponto O é:
O momento de R
,→
MR~ = x̄ Ry − ȳ R x = 9,23 × (−10,0) − (−0,88) × (27,0)
= −92,23 + 23,38
= −68,5 cm .
~ pela expressão
4a solução – Cálculo direto do momento da resultante R
~ sen(ψ) ,
MR~ = ā |R|
~ ao eixo Oz e ψ é o
em que ā = |~a| é a distância do ponto de aplicação de R
~ (veja Fig. 4.39).
ângulo entre ~a e R
Já vimos que x̄ = +9,233 cm e ȳ = −0,876 cm, dessa forma,
~a = (9,233 cm)ı̂ + (−0,876 cm) ̂
portanto
ā = |~a| =
p
(9,233 cm)2 + (−0,876 cm)2 =
p
85,83 cm
= 9,26 cm .
“ADT-MF” — 2005/11/7 — 8:51 — page 201 — #201
201
4.5. Composição de forças paralelas
Figura 4.39: A resultante e seu ponto de aplicação.
E, como R x = 27,0 gf e Ry = −10,0 gf,
~ = (27,0 gf)ı̂ + (−10,0 gf) ̂
R
portanto
~ =
|R|
q
(27,0 gf)2 + (−10,0 gf)2 =
√
829 gf
= 28,8 gf .
Ângulo α entre Ox e ~a:
tan(α) =
~
Ângulo entre ~a e R:
ay −0,876
=
= −0,095
ax
9,223
⇒
α = −5◦ 240
(ϕ determinado em (4.5))
ψ = ϕ − α = (−20◦ 190 ) − (−5◦ 240 ) ≈ 14◦ 550 .
Donde
~ sen(−14◦ 550 )
MR~ = ā |R|
= (9,26 cm) × (28,8 gf) × (−0,258)
= −68,8 cm gf .
Achamos pelos vários métodos os valores numéricos: −69,0; −68,5; −68,7
e −68,8. Vemos portanto que todos os métodos conduzem praticamente ao
mesmo resultado, havendo uma discrepância entre o maior e o menor resultado
de 69,0 − 68,5 = 0,5 ou de 0,8 %, a qual é devida às aproximações.
“ADT-MF” — 2005/11/7 — 8:51 — page 202 — #202
202
Capítulo 4. Estudo do corpo rígido
Problema 4.20. Uma barra L está articulada a um eixo vertical Oz e faz com
o eixo Ox um ângulo de θ = 60◦ , estando no plano Oxy horizontal, tendo
` = 30 cm de comprimento, veja Fig. 4.40. Uma força F~1 de 25 gf está aplicada
em sua extremidade livre, formando um ângulo de −30◦ , no plano xy. Outra
força F~2 está aplicada no meio da barra L, o ângulo entre a barra e a força
sendo igual a 60◦ e sua intensidade é igual a 15 gf.
1. Calcule o momento de cada força em relação ao pólo O.
2. Determine o momento resultante em relação a O, use três métodos.
3. Faça a representação do momento de cada força e do momento resultante (em relação a O) num gráfico.
4. Determine a força horizontal F~ horizontal necessária para equilibrar
o momento resultante, a direção da força F~ sendo ortogonal à barra,
estando aplicada a (3/4)` a partir do ponto O.
Figura 4.40: Forças aplicadas em uma barra articulada.
Problema 4.21. Demonstre que a posição do ponto de aplicação da resultante e a sua direção não dependem do sistema de eixos escolhidos para sua
determinação.
4.6
Centro de gravidade
Um caso muito importante de forças paralelas é aquele fornecido por um conjunto de pesos na superfície da Terra. Sabemos que o peso de um corpo é a
força com que a terra o atrai para o seu centro, desse modo, dado um conjunto de pesos pi , como em geral a distância entre os pontos de aplicação das
forças é extremamente pequena 24 em comparação com o raio da Terra, pode24
u
Bem como a extensão do corpo considerado.
“ADT-MF” — 2005/11/7 — 8:51 — page 203 — #203
203
4.6. Centro de gravidade
mos considerar tais pesos como paralelos, e, neste caso, para determinarmos
o ponto de aplicação do peso total, soma dos pesos dos corpos, aplicam-se as
noções anteriores para determinação do centro de forças paralelas que neste
caso específico se denomina centro de gravidade do corpo.
4.6.1
Centro de gravidade de uma distribuição linear de pesos
Suponhamos n pesos P1 , P2 . . . Pn sobre uma haste cujo peso cujo peso se acha
aplicado, por hipótese, no centro geométrico da haste e é indicado por P5 na
Fig. 4.41.
Figura 4.41: Forças aplicadas em uma barra retilínea.
Indiquemos por Ox o eixo que se adota sobre a haste, e cuja origem se
encontra em uma das extremidades da haste. Denotemos por xi as abscissas do
P
peso 25 Pi ( i ∈ {1, 2 . . . n}) relativamente a Ox, então, se P = ni=1 Pi é o peso
total do conjunto e sendo x a abscissa do ponto de aplicação do peso P,
xP =
n
X
x Pi
⇒
i=1
1
x = Pn
1
n
X
Pi
x Pi .
i=1
Assim, tudo se passa como se o peso do conjunto estivesse atuando nesse centro de gravidade de abscissa x sobre a haste e na direção vertical. Nesse caso,
um suporte sob a haste, tal que a direção da vertical que passe pelo seu centro
de gravidade passe também sobre o suporte, fará com que a haste fique em
equilíbrio sobre o suporte.
Problema 4.22 (́–́). Utilize uma haste metálica fina E, como o
ponteiro do estojo de mecânica.
1. Determine o peso do ponteiro E:
25
u
Note-se que por “peso” deve-se entender “intensidade da força peso”.
“ADT-MF” — 2005/11/7 — 8:51 — page 204 — #204
204
Capítulo 4. Estudo do corpo rígido
(a) Usando os dinamômetros.
(b) Usando apenas um peso de 20 gf.
2. Coloque os pesos de 20 gf, 10 gf e 5 gf respectivamente (veja Fig. 4.42):
numa extremidade A do ponteiro, a `/4 da distância de A, a 3`/4 de A,
em que ` é o comprimento do ponteiro, e determine o centro de gravidade (CG) do conjunto. Verifique experimentalmente se o cálculo está
dentro do erro admissível (1 %).
3. Determine o CG da mesma distribuição acrescida porém de um peso
de 40 gf colocado na extremidade B, oposta a de A sobre a haste (ver
Fig. 4.43). Qual a conclusão relativamente à posição do novo centro de
gravidade e ao fato de ter aumentado o peso em B? Onde está o novo
centro de gravidade?
Figura 4.43: Ilustração correspondente
ao Probl. 4.22 (item 3).
Figura 4.42: Ilustração correspondente
ao Probl. 4.22 (item 2).
4.6.2
Centro de gravidade de uma distribuição de pesos no plano
Suporemos que no retângulo da Fig. 4.44, com visão espacial do plano horizontal na Fig. 4.45, existam pesos p1 , p2 . . . pn ; as coordenadas desses pontos
sendo
(x1 , y1 ), (x2 , y2 ), . . . , (xn , yn ) ,
a cota (i.e., a coordenada z) sendo zero porque todos eles estão sobre o plano
Oxy. O eixo Oz é ortogonal ao plano do papel e não é representada na Fig. 4.44.
Como os pesos têm todos a direção do eixo Oy, os momentos das forças
peso em relação aos eixos 26 Ox e Oy serão respectivamente:
y1 P1 , y2 P2 . . . yn Pn
26
u
e
x1 P1 , x2 P2 . . . xn Pn .
O que se chama de momento de uma força em relação a um eixo é a projeção sobre
“ADT-MF” — 2005/11/7 — 8:51 — page 205 — #205
205
4.6. Centro de gravidade
Figura 4.44: Placa retangular com pesos
distribuídos no plano horizontal da placa
(eixo Oz saindo da figura).
Figura 4.45: Placa retangular horizontal
com pesos distribuídos no plano da placa,
visão espacial.
A soma desses momentos será igual ao momento da resultante P, que é a soma
P
dos pesos P = Pi e se localiza no ponto de coordenadas ( x̄, ȳ), donde:
x̄P =
n
X
xi Pi
⇒
n
1 X
xi Pi
x̄ = P
Pi i=1
⇒
n
1 X
yi Pi .
ȳ = P
Pi i=1
i=1
ȳP =
n
X
i=1
yi Pi
Problema 4.23. Determinar o centro de gravidade da estrutura formada por
três hastes ligadas em U. Veja Fig. 4.46. Verifique experimentalmente.
Problema 4.24. Coloque sobre uma placa retangular três pesos: dois de 20 gf
sobre dois vértices mais próximos e um peso de 10 gf entre dois vértices mais
afastados (veja Fig. 4.47). Determine o centro de gravidade do conjunto e verifique experimentalmente.
4.6.3
Centro de gravidade de uma distribuição de pesos no espaço
Este caso é simples. De fato, seja o conjunto de cinco pesos, P1 , P2 . . . P5 , de
coordenadas (veja Fig. 4.48)
(x1 , y1 , z1 ), (x2 , y2 , z2 ) . . . (x5 , y5 , z5 ).
o eixo do momento dessa força em relação a um ponto (qualquer) desse eixo (pode-se
demons,→
~ A) =
trar que essa projeção não depende do ponto do eixo escolhido), nesse sentido, se M (O, F,
M x ı̂+My ̂+Mz k̂ é o momento em relação à origem O da força F~ aplicada no ponto A, então M x
é o momento dessa força em relação ao eixo Ox, etc.
“ADT-MF” — 2005/11/7 — 8:51 — page 206 — #206
206
Capítulo 4. Estudo do corpo rígido
Figura 4.46: Esquema do Probl. 4.23.
Figura 4.47: Esquema do Probl. 4.24.
A localização do centro de gravidade se fará pelas relações:
5
1 X
x̄ = P
xi Pi ,
Pi i=1
5
1 X
ȳ = P
yi Pi ,
Pi i=1
5
1 X
z̄ = P
zi Pi ,
Pi i=1
as duas primeira obtidas de modo análogo ao caso de uma distribuição plana
Figura 4.48: Forças peso distribuídas espacialmente.
de pesos, e a última supondo, por exemplo, que o conjunto de pesos solidários
com o sistema de eixos Oxyz tenha sido girado em torno do eixo Ox, ficando
com o plano Oxz horizontalmente, neste caso, o momento das forças em relação ao eixo Ox será z1 P1 , z2 P2 . . . zn P5 , visto que os pesos serão ortogonais ao
plano Oxz, sendo a distância de cada peso 27 ao eixo Ox igual a sua coordenada z.
27
u
Usaram-se aqui 5 pesos, i.e., fez-se n = 5, apenas para fixar idéia.
“ADT-MF” — 2005/11/7 — 8:51 — page 207 — #207
4.6. Centro de gravidade
Problemas
Problema 4.25. Calcule o centro de gravidade da distribuição (tridimensional) de pesos de 5 gf, 10 gf, 20 gf, 20 gf e 30 gf colocados nos pontos (2, 0, 0),
(2, 2, 0), (0, 2, 0), (0, 0, 3) e (2, 2, 2).
Problema 4.26. Três pesos de 5 gf, 10 gf e 20 gf são colocados nos vértices
de um triângulo equilátero de lado ` = 20 cm, conforme indica a Fig. 4.49.
Determine o centro de gravidade do conjunto de pesos, desprezando os pesos
dos fios rígidos que constituem o triângulo de sustentação.
Figura 4.49: Dispositivo do Probl. 4.26.
Problema 4.27. Sobre uma placa homogênea de 8 cm×16 cm, de peso igual
a 20 gf, colocam-se três pesos de 5 gf, 20 gf e 10 gf nas posições indicadas na
Fig. 4.50. Pergunta-se em que ponto da placa deve-se colocar por baixo (da
placa) um suporte vertical a fim de que a placa fique em equilíbrio sobre ele
disposta horizontalmente.
Figura 4.50: Dispositivo do Probl. 4.27.
Problema 4.28. Uma estrutura é constituída de um arco homogêneo circular
de raio R = 1 m e que pesa 10 kgf, soldados ao arco há duas barras homogêneas de 2 m de comprimento, de tal modo que fazem entre si um ângulo reto e
estão na direção radial do aro (cf. Fig. 4.51). Pede-se a posição do centro de
gravidade do conjunto.
Problema 4.29. Um peso de 20 kgf está suspenso do teto de uma sala e um fio
lateral horizontal puxa-o para a direita. Veja Fig. 4.52. Pede-se a tensão nos
fios AC e CB, solução gráfica, trigonométrica e analítica.
207
“ADT-MF” — 2005/11/7 — 8:51 — page 208 — #208
208
Capítulo 4. Estudo do corpo rígido
Figura 4.51: Probl. 4.28.
Figura 4.52: Probl. 4.29.
Problema 4.30. Uma haste de comprimento ` = 31 cm está em equilíbrio conforme indica a figura, sustentando nas suas extremidades os pesos de 30 gf e
5 gf, a distância do peso de 30 gf ao suporte é de 11,8 cm (cf. Fig. 4.53). Qual
o peso da haste?
Figura 4.53: Probl. 4.30.
Problema 4.31. Calcule o momento da força F~ = (3ı̂+2 ̂+0 k̂) kgf em relação
à origem do sistema de eixos coordenados, sabendo-se que ela está aplicada
no ponto de vetor posição ~r = (3 m)ı̂+(4 m) ̂+(0 m) k̂. Faça a representação
gráfica.
Problema 4.32. Calcule o momento em relação à origem do sistema de eixos
coordenados das forças
F~1 = (2 kgf)ı̂+(4 kgf) ̂+(0 kgf) k̂ e F~2 = (2 kgf)ı̂+(−5 kgf) ̂+(0 kgf) k̂
aplicadas ao longo de uma haste articulada ao eixo Oz e que jaz no plano
xy. A haste tem 30 cm de comprimento. A força F~1 se acha aplicada no ponto
médio da haste e F~2 na sua extremidade. A haste forma com o eixo Ox um
ângulo de 37◦ .
Problema 4.33. Uma força F~ = (−5 kgf)ı̂+(−4 kgf) k̂+(2 kgf) k̂ está aplicada
no ponto de vetor posição ~r = (5 m)ı̂+ (5 m) ̂ + (−3 m) k̂. Calcule o momento
dessa força em relação ao ponto O, origem
do sistema de coordenadas, e faça
,→
,→
uma representação gráfica do momento M = M x ı̂+My ̂+Mz k̂. Represente M e
~ (Depois de resolvido, veja Fig. 4.54)
suas componente, bem como ~r e F.
“ADT-MF” — 2005/11/7 — 8:51 — page 209 — #209
4.6. Centro de gravidade
Figura 4.54: Representação gráfica para o Probl. 4.33.
4.6.4
Centro de gravidade de uma distribuição não-discreta de
pesos 28
Nos próximos parágrafos deste capítulo completamos a conceituação da Estática, no que diz respeito a um primeiro estudo no nível da Mecânica Física.
Mostramos ao estudante o uso do Cálculo Integral, por um exemplo simples
de determinação de centro de gravidade; o objetivo é alertá-lo e torná-lo consciente de que deve colaborar com o professor de matemática, aceitando o seu
ensino e aprofundando seus conhecimentos em bons livros disponíveis na Biblioteca. Para a Física Básica o que importa realmente é o conceito de integral
de Riemann e precipuamente o teorema fundamental do cálculo integral. Os
28
u Essa secção é basicamente o Preâmbulo do Fascículo IV, assinado pelo Prof. Armando
e datado de junho de 1979.
209
“ADT-MF” — 2005/11/7 — 8:51 — page 210 — #210
210
Capítulo 4. Estudo do corpo rígido
exemplos do uso da integral na Física devem ser feitos pelo professor de Física
na ocasião oportuna, os professores de Matemática mostrando as aplicações
na Geometria. Não deverá o professor de Matemática prejudicar o seu curso
e o rigor matemático das demonstrações de teoremas, cedendo a pressões de
alunos a pretexto de que o que interessa é saber trabalhar com a matemática
e não demonstrar teoremas. Muito ao contrário, os conceitos devem ser dados
com todo rigor, as ilustrações e exemplos bem simples e claros para a boa
compreensão da matéria tratada. Não deve preocupar-se em dar exemplos da
Física que, em geral, os alunos não conhecem, tornando mais obscuro ainda o
conceito a ser explanado.
Introduzimos aqui experiências e problemas sem desenvolver suas soluções, achamos que com o estudo já efetuado e os problemas já tratados terá o
estudante adquirido o “processo de abordagem” de problemas, chegando com
algum esforço à solução; isso não é feito por economia, mas por valorização
do estudante.
Procuramos principalmente estabelecer os conceitos de Física em toda sua
generalidade, a fim de que possam aplicar-se em todos os casos particulares,
mas um exemplo é sempre um caso particular e assim haverá perda de generalidade na exemplificação, por isso damos mais de um exemplo e experiências,
a fim de cobrir o maior número possível de aspectos, para que no conjunto se
obtenha a generalidade almejada.
Terminamos este capítulo com o estudo da balança que fornece uma boa
aplicação dos conceitos estudados e o capítulo com o estudo das forças de
atrito entre superfícies sólidas.
4.6.5
Caso de uma distribuição linear contínua de pesos
Embora já tenhamos medido experimentalmente o centro de gravidade de uma
haste (cf. pág. 203), estudaremos agora como se pode determiná-lo teoricamente.
Consideremos inicialmente uma haste fina de modo que podemos supor,
sem erro apreciável, que seu peso esteja homogênea e linearmente ao longo de
seu eixo. Suporemos uma haste de peso igual a 20 gf e comprimento L = 25 cm,
disposta horizontalmente.
Vamos considerar um sistema de coordenadas Oxy, o eixo Ox coincidindo
com o eixo da haste cuja extremidade A está na origem. 29 Veja Fig. 4.55.
29
u Note-se que poderíamos ter adotado qualquer outro sistema de coordenadas no espa
ço tridimensional do laboratório onde se supõe estar (ou está) a haste. O sistema adotado é o
mais recomendado para essa situação porque expressa as coordenadas do que nos interessa do
“ADT-MF” — 2005/11/7 — 8:51 — page 211 — #211
211
4.6. Centro de gravidade
Figura 4.55: Ilustração para o centro de gravidade de uma haste fina.
Sejam os pontos de abscissa xi−1 e xi+1 tais que xi+1 −xi−1 = ∆xi seja muito
pequena. O centro de gravidade do elemento ∆xi estará em um ponto intermediário de abscissa xi . O peso ∆pi do elemento correspondente ao intervalo
(xi−1 , xi+1 ) da haste, que contém xi , terá momento em relação ao ponto O igual
a xi ∆pi . Se calcularmos o momento como se a distância entre o centro de gravidade de ∆pi fosse xi−1 ou xi+1 , casos extremos, teríamos:
xi−1 ∆pi ≤ xi ∆pi ≤ xi+1 ∆pi .
(4.6)
Supondo a haste dividida em elementos semelhantes e aplicando o mesmo
raciocínio a cada elemento em que dividirmos a barra,
∆x1 , ∆x2 . . . ∆xi . . . ∆xn ,
de pesos ∆p1 , ∆p2 . . . ∆pi . . . ∆pn ,
e tomando cada peso ∆pi em que o peso total da barra ficou dividido (i ∈
{1, 2 . . . n} ⊂ N), teremos que a soma desses momentos é igual ao momento do
P
peso p da barra, em que P = i ∆pi , e portanto:
xP =
n
X
xi ∆pi .
(4.7)
i=1
Além disso, somando em i as relações (4.6):
n
X
i=1
xi−1 ∆pi ≤
n
X
i=1
xi ∆pi ≤
n
X
xi+1 ∆pi .
(4.8)
i=1
modo mais simples e objetivo, ou seja, as forças peso estão no plano Oxy, paralelas ao eixo Oy
e, além disso, como a haste está posicionada na horizontal, os pontos da haste terão a mesma
coordenada y, no caso y = 0, para todos os pontos que constituem a haste quando desprezamos
o diâmetro de sua secção reta em face de seu comprimento.
“ADT-MF” — 2005/11/7 — 8:51 — page 212 — #212
212
Capítulo 4. Estudo do corpo rígido
P
É claro que a soma i xi ∆pi não pode ser determinada por ignorarmos a
localização de cada centro de gravidade dos ∆xi em que supusemos a barra
P
dividida. Por outro lado, a soma i xi−1 ∆pi introduzirá um erro por falta, e a
P
soma i xi−1 ∆pi um erro por excesso.
A maneira de diminuir o erro é diminuir o comprimento de ∆xi , e, para
eliminar o erro, podemos fazer ∆xi tender a zero, ipso facto, ∆pi tenderá para
zero, o que ocorrerá obviamente aumentando-se indefinidamente o número de
divisões da barra, isto é, para n → ∞. Temos: ∆pi → 0 quando n → ∞, e
lim
n→∞
n
X
(xi−1 ∆pi ) ≤ lim
n
X
n→∞
i=1
(xi ∆pi ) ≤ lim
n
X
n→∞
i=1
(xi+1 ∆pi ) .
(4.9)
i=1
P
P
Chamando as somas i (xi−1 ∆pi ) e i (xi+1 ∆pi ) de soma inferior e soma superior respectivamente, podemos dizer que a soma inferior tende para a soma superior quando o número de termos (parcelas) da soma cresce indefinidamente,
ou que o limite da soma inferior é igual ao limite da soma superior quando o
número de termos cresce indefinidamente.
R
Representamos esse limite por um símbolo que é uma alteração do S: ;
por sua vez, os elementos ∆pi serão representados por dp, assim o momento
do peso total será:
Z L
xP =
x dp ,
(4.10)
0
R
tendo-se acrescentado no símbolo o início da barra (correspondente a x = 0) e
o comprimento da barra L (correspondente a x = L), pois o comprimento L foi
dividido desde o início, x = 0, até o fim, x = L, então 0 e L correspondem aos
pontos entre os quais se calcula a soma: desde 0 até L. O primeiro se chama
limite inferior e o segundo limite superior. O limite da soma toma o nome de
integral.
Podemos calcular a integral por processos estudados na cadeira de Cálculo.
Examinemos alguns aspectos dessa integral. Temos a relação (4.10), mas
P=
n
X
i=1
∆pi = lim
n→∞
n
X
i=1
Z
∆pi =
L
dp ,
0
como é óbvio, pois qualquer que seja o número de divisões do peso P, a soma
dessas subdivisões será sempre o peso P total da barra. Para efetuarmos a soma
RL
x dp, entretanto, o processo é mais complicado.
0
“ADT-MF” — 2005/11/7 — 8:51 — page 213 — #213
213
4.6. Centro de gravidade
4.6.6
Peso específico
Um elemento ∆x da barra tem peso ∆p, a relação π = ∆p/∆x se denomina peso
específico médio do elemento ∆x. A razão da denominação peso específico
médio é que o peso pode variar ao longo de ∆x, por exemplo, suponhamos que
dividimos ∆x em duas partes, ∆x1 e ∆x2 , tal que ∆x = ∆x1+∆x2 , e que a primeira
parte ∆x1 tenha o dobro do peso de ∆x2 , isto é, ∆p1 = 2∆p2 ; calculando o peso
específico de ∆x1 e de ∆x2 teremos:
π1 =
∆p1
∆x1
e
π2 =
∆p2
,
∆x2
mas como
∆p1 = 2 ∆p2
π1 =
e
∆x1 = ∆x2 =
∆x
,
2
∆p1 2 ∆p2
∆p2
=
=2
= 2 π2 ,
∆x1
∆x2
∆x2
assim π1 = 2π2 , e o peso específico da primeira parte sendo igual ao dobro do
peso específico médio da segunda parte.
Ainda:
∆p ∆p1 + ∆p2 ∆p1 ∆p2
=
=
+
, mas ∆x = 2∆x1 = 2∆x2 ,
∆x
∆x
∆x #
" ∆x
∆p1
∆p2
1 ∆p1 ∆p2
=
+
=
+
⇒ π = 21 (π1 + π2 ) ,
2 ∆x1 2 ∆x2 2 ∆x1 ∆x2
π=
isto é, o peso específico médio de ∆x é igual a média dos pesos específicos das
duas partes em que ficou dividido, observe-se que ∆x ficou dividida em duas
partes iguais.
Podemos aplicar a noção de limite para obter o peso específico num ponto.
Por definição:
∆p
,
π = lim
∆x→0 ∆x
em que π é o peso específico (unidimensional) no ponto contido no elemento
∆x da barra quando este tende a zero (∆x → 0); fazendo-se ∆x tender a zero,
∆x
o intervalo fechado [x− ∆x
2 , x+ 2 ] tende para o conjunto {x}, formado apenas
pelo ponto de abscissa x, diremos então que π(x) é o peso específico calculado
no ponto x.
Observe-se que o peso específico (unidimensional) é o peso dividido por um
comprimento, sendo portanto o peso por unidade de comprimento, no caso do
“ADT-MF” — 2005/11/7 — 8:51 — page 214 — #214
214
Capítulo 4. Estudo do corpo rígido
peso específico no ponto, diz-se que é o peso por unidade de comprimento
calculado no ponto.
Como já sabemos, o limite
lim
∆x→0
∆p dp
=
∆x dx
⇒
π=
dp
dx
coincide com o conceito da derivada da função p = p(x) em relação a x, assim,
a diferencial
dp = π(x) dx ,
em que π é uma função de x, mede o peso do elemento correspondente ao
intervalo (x, x + dx), a menos de infinitésimos de segunda ordem e de ordens
superiores.
Deste modo, a integral (4.10) pode ser escrita sob a forma:
Z L
xP =
π(x) x dx .
(4.11)
x
Observe-se que em (4.10) a diferencial dp era uma função de x que ainda
não havíamos expressado, agora, em (4.11), a diferencial foi substituída pela
diferencial π dx, em função de x e da diferencial dx da variável x, e sendo
π = f (x); assim o produto πdx é uma função de x, dessa forma:
Z L
Z L
Z L
x dp =
x π dx =
x f (x) dx ,
0
0
0
RL
sendo a integral (i.e., o limite da soma) 0 x f (x)dx denominada integral de
Riemann, e cujo cálculo aprendemos na cadeira de Cálculo Diferencial e Integral.
Vejamos o cálculo do centro de gravidade de uma barra homogênea de
ferro e de comprimento L, o termo homogêneo significando que o peso específico é constante ao longo da barra [π constante no domínio x ∈ (0, L)].
Neste caso, sendo π constante no intervalo (0, L) em (4.11), podemos “passálo para fora do sinal da integral” (i.e., pô-lo em evidência na “soma”), logo
RL
xP = π 0 xdx sendo a integral facilmente calculada:
Z
xP = π
L
x dx = π
0
h
1
2
x2
iL
0
= π 12 (L2 − 0) =
1
2
π L2 =
1
2
(π L) L ,
RL
mas o peso total da barra é P = 0 πdx = π(L −0) = π L, logo x = L2 . Isto é, o
centro de gravidade da barra se localiza no ponto médio da barra.
“ADT-MF” — 2005/11/7 — 8:51 — page 215 — #215
215
4.7. Condições de equilíbrio de um corpo rígido
Concluímos que se a barra tem peso distribuído de modo homogêneo ao
longo de seu eixo, seu centro de gravidade situa-se no seu ponto médio, a
recíproca porém não sendo verdadeira. Entretanto, se o centro de gravidade
não se localiza no ponto médio, a barra não será homogênea. 30
4.7
Condições de equilíbrio de um corpo rígido
Se um corpo rígido está sujeito a um conjunto de forças, uma condição necessária para que ele esteja em equilíbrio (em repouso, parado ou em movimento
retilíneo e uniforme 31 ) é que a resultante de todas as forças a ele aplicada seja
nula: (para n forças aplicadas)
~ =
R
n
X
F~i = ~0 ,
i=1
mas esta condição de equilíbrio não é suficiente para um corpo rígido, pois
a resultante pode ser nula e o corpo não estar em equilíbrio, mas girando em
torno de si mesmo (do seu centro de massa) com movimento acelerado de
rotação.
De fato, duas forças paralelas F~1 e F~2 , de sentidos contrários e mesma
intensidade, farão o corpo girar em torno do seu centro de massa, com movimento acelerado, sejam quais forem os pontos de aplicação de F~1 e F~2 que não
definam uma reta paralela às forças. 32 O conceito de centro de massa e a demonstração do que afirmamos anteriormente será feito na dinâmica (pág. 399).
O conjunto de duas forças de mesma intensidade e sentidos opostos aplicadas em pontos distintos constituem o binário ou conjugado.
~ = F~1 + F~2 = ~0, pois F~1 =
A resultante de um binário é nula, já que R
−F~2 . Entretanto o momento resultante, soma dos momentos das duas forças em
relação a qualquer ponto do plano, não é necessariamente nulo. Esse momento
chama-se binário.
De fato, seja o ponto P, veja Fig. 4.56, e calculemos o momento do binário.
30
u Note-se que o centro de gravidade “transforma” o tratamento de uma distribuição
infinita de forças peso aplicadas em pontos de um intervalo finito em uma única força peso
aplicada no centro de gravidade do corpo.
31
u Em relação a um referencial inercial.
32
~1 e F~2 aplicadas no corpo não constituírem um sistema nulo de
u Isto é, se as forças F
forças (Fig. 4.2).
“ADT-MF” — 2005/11/7 — 8:51 — page 216 — #216
216
Capítulo 4. Estudo do corpo rígido
Figura 4.56: Binário atuando sobre um corpo rígido.
Teremos:
MF~1 = +c1 |F~1 | , positivo (por quê?)
MF~2 = −c2 |F~2 | , negativo (por quê?)
A soma:
MP = MF~1 + MF~2 = +c1 |F~1 | − c2 |F~2 | , como |F~1 | = |F~2 | = F ,
= F(c1 − c2 )
= −a F ,
isto é, o momento do binário em relação ao ponto 33 P é igual ao produto da
intensidade de uma das forças pela distância entre as retas suporte das forças
que constituem o binário. É fácil mostrar que esse valor é constante, seja qual
for o ponto P em relação ao que se tome os momentos das forças para calculá-lo. Com efeito, seja o ponto P0 (veja Fig. 4.56) qualquer no plano da figura,
temos:
M 0~ = −c01 |F~1 |
F1
e
M 0~ = −c02 |F~2 | ,
F2
daí
MP0 = M 0~ + M 0~ = −c01 |F~1 | − c02 |F~2 | = − c01 + c02 F = −a F ,
F1
F2
portanto MP = MP0 = −aF, tendo o momento do binário o mesmo resultado.
Qual o significado do sinal −?
33
u
Um ponto qualquer, mesmo não sendo um ponto do corpo rígido.
“ADT-MF” — 2005/11/7 — 8:51 — page 217 — #217
4.7. Condições de equilíbrio de um corpo rígido
Observação
Lembremos que quando tratamos de forças paralelas e de sentidos contrários
(pág. 164), para localizar o ponto de aplicação da resultante obtivemos a relação (4.1), que repetimos aqui (veja Fig. 4.57):
|F~1 |
b =
a ,
|F~2 | − |F~1 |
em que a é a distância entre as retas suporte das forças F~1 e F~2 , e b é a distância
entre as retas suporte de F~2 e da resultante desse par de forças.
Figura 4.57: Duas forças paralelas e de sentidos contrários sobre um corpo rígido.
Ora, se as duas forças têm o mesmo módulo, ficamos em uma situação impossível para calcular o valor numérico para b, uma vez que não existe inverso
multiplicativo do elemento zero. Esta dificuldade fica esclarecida se considerarmos a situação limite para os módulos das forças tendendo a serem iguais
(em vez do cálculo do valor numérico local 34 ), ou seja,
|F~1 |
b = lim
a = ∞ ,
~2 | − |F~1 |
|F~1 |→|F~2 | | F
isto é, teríamos uma força resultante nula localizada no infinito e seu momento
~
em relação a um ponto do plano seria: M = |R|×b
= 0×∞, uma indeterminação. Mas neste caso teríamos o binário, cujo momento é igual ao produto da
intensidade de uma das forças pela distância entre suas retas suporte, a indeterminação sendo assim levantada.
Podemos concluir:
34
u Sempre que se encontrar uma expressão como c/0 = ∞, deve-se entendê-la como o
limite a que estamos nos referindo. Ah, lembre-se, ∞ não é um número!
217
“ADT-MF” — 2005/11/7 — 8:51 — page 218 — #218
218
Capítulo 4. Estudo do corpo rígido
Para que o corpo rígido esteja em equilíbrio é necessário, ainda,
que o somatório dos momentos das forças aplicadas, em relação a
um ponto qualquer, seja nulo.
Logo, a condição necessária e suficiente para que um corpo rígido esteja
em equilíbrio é que a resultante das forças aplicadas ao corpo rígido seja nula
e o momento resultante também seja nulo, de modo mais sintético: (em relação
a um referencial inercial)
~ = P F~i = ~0
R
,→
corpo rígido em equilíbrio
⇔
.
(4.12)
P ,→
M = Mi = ~0
,→
~ e M são vetores, cada um com três (3) componentes, logo
No caso geral, R
as duas condições de equilíbrio para um corpo rígido sintetizadas em (4.12)
são equivalentes a seis (6) condições que definem um sistema
de seis equações
,→
~ e M:
algébricas em termos das componentes dos vetores R
Rx = 0
Mx = 0
,→
~
~
~
R=0 ⇔
e
M=0 ⇔
Ry = 0
My = 0 .
Rz = 0
Mz = 0
Observação Tratando como no presente curso de forças coplanares, os momentos destas forças em relação a qualquer ponto do plano é um vetor ortogonal ao plano e, assim, se os eixos Oxy estão no plano, teremos as três
condições:
n
R x = 0
,→
~0 ⇔ Mz = 0 .
~ = ~0 ⇔
R
e
M
=
Ry = 0
,→
~ é identicamente nula e as outra de M, M x e My tama outra componente de R
bém são identicamente nulas (por quê?). Deste modo, num problema de equilíbrio de um corpo rígido no plano, podemos resolver problemas com três (3)
incógnitas.
Observe-se que o momento resultante é nulo, seja qual for o ponto em
relação ao qual se calcule o momento; deste modo, é mais conveniente que
se escolha o ponto que elimine (anule) uma ou mais incógnitas nas equações
para facilitar os cálculos, isso pode ser feito escolhendo o pólo no ponto onde
houver maior número forças aplicadas ou na intersecção de retas suporte do
maior número de forças concorrentes.
“ADT-MF” — 2005/11/7 — 8:51 — page 219 — #219
219
4.7. Condições de equilíbrio de um corpo rígido
4.7.1
Problemas
Problema 4.34.
a) Determine literalmente para uma estrutura, como a da Fig. 4.58, a tensão
no cabo AC e a reação no ponto B onde a viga BC está articulada.
b) Verifique verifique experimentalmente os valores encontrados. (Como se
~ Meça-a.)
pode medir a reação R?
Figura 4.58: Dispositivo correspondente
ao Probl. 4.34.
Figura 4.59: Dispositivo correspondente
ao Probl. 4.35.
Problema 4.35. Idem para a estrutura da Fig. 4.59.
Figura 4.60: Estruturas para o Probl. 4.36.
Problema 4.36. Cada barra BC das estruturas da Fig. 4.60 está articulada
em B. Escolha um sistema de eixos ortogonais Oxy, com eixo Oy na vertical
e o eixo Ox na horizontal, a origem O coincide com o ponto B, isto é, com o
ponto onde o eixo de articulação corta o papel. Ponha P = 5 gf, determine |T~ |
~ para cada uma das três situações apresentas na Fig. 4.60 e tire a prova
eR
verificando experimentalmente.
“ADT-MF” — 2005/11/7 — 8:51 — page 220 — #220
220
Capítulo 4. Estudo do corpo rígido
Sugestão Aplique as Leis de Newton ao “corpo” BC (viga) e use um sistema
cartesiano ortogonal para resolver o problema. Com o sistema de eixos mencionado escreva as condições de equilíbrio da barra. As forças estão no plano
Oxxy, tome os momentos das forças em relação ao eixo Oz, ou em relação à
origem O.
4.8
Estudo da balança 35
Apresenta-se um estudo sucinto da balança analítica em que se tem oportunidade de verificar experimentalmente seus principais aspectos, variando sua
sensibilidade pela mudança da posição do centro de gravidade do instrumento.
4.8.1
Qualidades da balança
Veja Fig. 4.61 e Fig. 4.62 onde estão definidos alguns termos pertinentes à balança.
Estabilidade – qualidade pela qual a balança mantém equilíbrio estável para
qualquer carga.
Justeza – qualidade pela qual a balança, quando se colocam pesos iguais nos
seus pratos, fica em equilíbrio no mesmo ponto em que o fiel estava
indicando quando sem pesos nos pratos.
Sensibilidade – qualidade pela qual a balança indica apenas variações de massa em um dos pratos.
Fidelidade – qualidade pela qual a balança em sucessivas determinações do
ponto de equilíbrio apresenta sempre o mesmo resultado.
Rapidez – qualidade pela qual as oscilações da balança se efetuam em intervalos de tempo muito pequeno.
Rigidez – a cruz é indeformável seja qual for a carga nos pratos, seu centro de
gravidade é fixo.
Veja também Fig. 4.63 e Fig. 4.65, pág. 223 e pág. 224.
35
u Originalmente esse parágrafo termina o Fascículo IV, antecedido pelo parágrafo sobre
o atrito, que colocamos no §4.10.
“ADT-MF” — 2005/11/7 — 8:51 — page 221 — #221
221
4.9. Problemas com a balança
Figura 4.61: Cruz da balança:
CH – travessão;
AF – fiel.
4.9
Figura 4.62: Balança:
CG – centro de gravidade da balança;
P1 e p2 – peso dos pratos;
pb = p1 + p2 – peso da balança;
mg – peso da sobrecarga.
Problemas com a balança
Problema 4.37. Monte a balança como indicado na Fig. 4.63, seguindo o detalhe destacado na Fig. 4.63.
Problema 4.38. Ponha L1 < L2 (balança de braços desiguais) e obtenha o
equilíbrio deslocando o anel N.
Problema 4.39. Descubra dois processos para mostrar experimentalmente 36
quando uma balança tem braços desiguais. Explique.
Problema 4.40. Descubra dois processos para medir corretamente com uma
balança de braços desiguais.
Problema 4.41. Determine a sensibilidade s da balança para carga zero nos
pratos.
Problema 4.42. Calcule a expressão da sensibilidade da balança. Faça a
montagem da balança correspondente à Fig. 4.65.
Solução Com referência à Fig. 4.65, quando p1 L1 = p2 L2 e se L1 = L2 , então
p1 = p2 . Daí,
mgL1 cos(θ) = pb `0 sen(θ) ,
36
Sem medir L1 e L2 .
“ADT-MF” — 2005/11/7 — 8:51 — page 222 — #222
222
Capítulo 4. Estudo do corpo rígido
mas para θ < 5◦ (i.e., para θ muito pequeno), cos(θ) ≈ 1 e sen(θ) ≈ D/L.
Portanto,
L1 L
s= 0 .
` pb
Problema 4.43. Ponha o cursor S em diferentes posições: d1 . . . d5 . Determine
e lance num gráfico as sensibilidades correspondentes em função de d: s =
f (d).
Problema 4.44. Levante a curva da sensibilidade de uma montagem da balança, por exemplo, com o cursor na posição d1 ou sem o cursor. Para isso
determine a sensibilidade para diferentes cargas p em cada prato e faça o
gráfico s = f (p), ponha p = 0, 5, 10, 15 e 20 gf.
Problema 4.45. Faça uma pesada usando a curva de sensibilidade da balança.
Problema 4.46. Faça o estudo da balança analítica no laboratório.
“ADT-MF” — 2005/11/7 — 8:51 — page 223 — #223
223
4.9. Problemas com a balança
Figura 4.63: Balança: L1 e L2 – braços da balança; p1 e p2 – pesos nos pratos;
mg – sobrecarga; CH – travessão; D – desvio para a sobrecarga mg; CAHF –
cruz; AC – fiel; L – comprimento do fiel.
Sensibilidade da balança – s:
s=
D
mg
pb – peso da balança;
pc – peso da cruz;
p p1 e p p2 – pesos nos pratos
pb = p p1 + p p2 + pc
Figura 4.64: Detalhe para a balança
da Fig. 4.63.
“ADT-MF” — 2005/11/7 — 8:51 — page 224 — #224
224
Capítulo 4. Estudo do corpo rígido
Figura 4.65: Balança: L1 e L2 – braços da balança; p1 e p2 – pesos nos pratos;
mg – sobrecarga; CH – travessão; D – desvio para a sobrecarga mg; G – centro
de gravidade da cruz; `0 – distância de G ao cutelo.
Dispositivo para aumentar a sensibilidade da balança, aumentando-se a distância d e, por conseguinte, elevando-se
G, isto é, diminuindo-se `0 . Por quê?
Figura 4.66: Detalhe A, para a balança da Fig. 4.65.
“ADT-MF” — 2005/11/7 — 8:51 — page 225 — #225
225
4.10. Atrito entre superfícies sólidas
4.10
Atrito entre superfícies sólidas 37
Suponhamos um corpo de peso P igual a 50 gf em repouso sobre uma mesa horizontal. Veja Fig. 4.67. Pergunta-se. Quais as forças que atuam sobre o corpo?
Figura 4.67: Corpo em repouso sobre
uma mesa horizontal.
Figura 4.68: Corpo em repouso sobre
uma mesa horizontal sujeito a força
horizontal.
~ do corpo e a reação N
~ da mesa sobre o
É claro que as forças são o peso P
corpo. São só estas forças? Sim. Então a resultante das forças que atuam sobre
~ = N+
~ P.
~ Como o corpo está em repouso, então, pela primeira lei
o corpo será R
~ é nula:
de Newton, a resultante R
~=N
~ +P
~ = ~0 ,
R
logo
~ = −P
~.
N
Suponhamos agora que fixemos um dinamômetro ao corpo, veja Fig. 4.68,
e por meio dele aplicamos uma força horizontal F~ que vá aumentando gradativamente desde a intensidade de valor zero. Verifica-se que para movermos o
corpo na direção da força horizontal F~ é necessário que sua intensidade atinja
um valor máximo |F~m |, valores menores de intensidade de F~ não movem o
corpo sobre a superfície da mesa. Analisaremos a situação quando não há deslocamento, apesar de aplicarmos uma força F~1 tal que |F~1 | < |F~m |.
Quais as forças que atuam sobre o corpo? Aparentemente as únicas forças
~ P
~ e F~1 , mas neste caso a resultante não seria
que atuam sobre o corpo são N,
nula e o corpo não permaneceria em repouso sobre a mesa; logo, se vale a
~ de modo
primeira lei de Newton, devemos concluir que há uma outra força X,
que
~=N
~ +P
~ + F~1 + X
~ = ~0 ,
R
37
u Originalmente este capítulo é o parágrafo do fascículo IV que antecede o estudo da
balança, que colocamos no §4.8.
“ADT-MF” — 2005/11/7 — 8:51 — page 226 — #226
226
Capítulo 4. Estudo do corpo rígido
~ = −P,
~ daí,
pois o corpo está em repouso sobre a mesa. Mas já vimos que N
~ = −F~1 . Com
valendo o princípio da superposição de forças, segue-se que X
base no que foi exposto, podemos concluir:
~ é variável pois |F~1 | pode variar desde 0 até o valor máximo
1. A força X
|F~m |, que é suficiente para deslocar o corpo.
~ é a mesma da força F~1 , isto é, paralela às superfícies em
2. A direção de X
contato, e seu sentido é contrário ao possível deslocamento.
De fato, se puxarmos o corpo em qualquer direção paralela ao tampo da mesa,
~ não atinja um certo valor. Tal
o corpo permanece em repouso, desde que |F|
força se denomina força de atrito estático. Como essa força é variável até
um valor máximo, é essa intensidade máxima que vai caracterizar a força de
atrito. Quando há movimento relativo entre as superfícies em contato, o atrito
decresce, denomina-se força de atrito cinético, de escorregamento ou de deslizamento.
4.11
Leis de Coulomb sobre o atrito
~ entre
1a ) A força máxima de atrito F~a = F~m é proporcional à força normal N
as superfícies em contato.
~
|F~a | = µe |N|
⇒
µe =
|F~a |
.
~
|N|
O coeficiente de proporcionalidade se denomina coeficiente de atrito
estático, sendo denotado por µe .
2a ) O coeficiente de atrito 38 não depende da área das superfícies em contato, depende apenas da natureza das substâncias que constituem essas
superfícies.
4.12
Caso do atrito cinético
Suponhamos que exercemos sobre o corpo a força F~m tal que F~a+F~m = ~0. Neste caso, o corpo fica ainda em equilíbrio, mas se aplicarmos uma força f~ na
direção e sentido de F~m , mesmo que muito pequena, o corpo se desloca. Suponhamos que retiremos a força f~. Neste caso o corpo deveria continuar com a
38
u
Tanto o estático como o cinético.
“ADT-MF” — 2005/11/7 — 8:51 — page 227 — #227
4.13. Experiências sobre o atrito
velocidade adquirida durante a aplicação de f~. Tal não ocorre porém, o corpo
fica em movimento acelerado na direção de F~m ; isto mostra que agora, quando
se observa velocidade relativa não-nula entre as superfícies de contato, a soma
da força de atrito com F~m não é nula, mas se dá uma resultante não-nula que
acelera o corpo. Tal fato significa simplesmente que o atrito diminui quando há
deslocamento relativo entre as superfícies de contato, para mantermos o corpo
em movimento retilíneo e uniforme, devemos aplicar uma força F~cm < F~m , a
fim de igualar em intensidade a nova força de atrito.
Os dois casos diferem, o primeiro se denomina atrito estático e o segundo
atrito cinético, como se viu.
O atrito cinético, além de obedecer as leis de atrito anteriores, satisfaz a
lei:
3a ) Para velocidades não muito grandes 39 o atrito não depende da velocidade do corpo sobre a superfície em contato.
O coeficiente de atrito cinético µc é menor que o coeficiente de atrito estático
µe , isto é, µc < µe . Explique.
4.13
Experiências sobre o atrito
1a Experiência Determine o coeficiente de atrito estático entre duas superfícies sólidas.
2a Experiência Seja um plano inclinado de um ângulo θ variável. Suponha
um corpo C sobre o plano. Se θ cresce, ele atingirá um valor θ2 tal que o corpo
desliza para baixo. Para valores de θ < θ2 o corpo não desliza. Prove que
µe = tan(θ2 ).
Esse ângulo θ2 se denomina ângulo de repouso.
3a Experiência Verifique as leis do atrito. Use a teoria dos erros. Faça várias
medições para cada caso, tire a média, ache a dispersão, o erro médio da média,
etc.
Compare os valores obtidos do coeficiente de atrito pelo modo indicado na
Fig. 4.70 e na Fig. 4.71 com os obtidos pelo ângulo de repouso.
39
u Essa restrição para velocidades não muito grandes é necessária para que as forças de
atrito viscoso não sejam significativas.
227
“ADT-MF” — 2005/11/7 — 8:51 — page 228 — #228
228
Capítulo 4. Estudo do corpo rígido
Figura 4.69: Correspondente à segunda experiência sobre atrito.
Figura 4.70: Correspondente à terceira experiência sobre atrito.
Figura 4.71: Correspondente à terceira experiência sobre atrito.
“ADT-MF” — 2005/11/7 — 8:51 — page 229 — #229
4.13. Experiências sobre o atrito
Problema 4.47. Calcule e determine experimentalmente a força F~ para cada
~ é suficientemente para não deixar
uma das situações da Fig. 4.72, onde |F|
escorregar ou para puxar para cima o corpo. O coeficiente de atrito µ deve ser
determinado experimentalmente e colocados os ângulos θ1 = 37◦ e θ2 = 30◦ .
Figura 4.72: Correspondente ao Probl. 4.47.
229
“ADT-MF” — 2005/11/7 — 8:51 — page 230 — #230
230
“ADT-MF” — 2005/11/7 — 8:51 — page 231 — #231
Parte II
Dinâmica:
Cinemática e Cinética ∗
∗
Ver Preâmbulo do Fascículo V transcrito na pág. 587
231
“ADT-MF” — 2005/11/7 — 8:51 — page 232 — #232
“ADT-MF” — 2005/11/7 — 8:51 — page 233 — #233
Capítulo 5
Mecânica
A Mecânica estuda o equilíbrio e o movimento dos corpos, suas causas e leis.
Divide-se 1 em duas partes: Estática e Dinâmica. A Estática estuda as forças,
sua composição, decomposição, redução e o equilíbrio dos corpos sob a ação
das forças. A Dinâmica pode ser considerada a teoria do movimento, divide-se
em duas partes: Cinemática e Cinética. A Cinemática estuda movimento dos
corpos, sem levar em conta as causas desses movimentos, isto é, as forças, é
por assim dizer, a geometria de movimento. A Cinética relaciona o movimento
dos corpos com as forças que o causam.
Alguns livros dividem a mecânica em três partes: Estática, Cinemática e
Dinâmica; a Dinâmica assumindo o posto da Cinética, e a Cinemática se desenvolvendo em um ramo independente 2 (p. ex., [27]).
Na primeira parte deste curso estudamos elementos de Estática, o suficiente para podermos desenvolver o restante do estudo de Mecânica no nível
elementar necessário para um primeiro estudo. Mencionamos as três leis de
Newton e falamos sobre a massa m do corpo, sem esclarecer muito bem o conceito de massa, tomando apenas o seu aspecto intuitivo, deixando sua definição
para mais tarde. Na Estática usamos apenas a primeira (1a ) e a terceira (3a ) leis
1
u Para fins didáticos, em textos que tratam da chamada Mecânica Vetorial baseada nas
Leis de Galileu–Newton, em contraste com a chamada Mecânica Analítica. (cf. [15])
2
u Também há livros que a dividem em Cinemática e Dinâmica; a Dinâmica entendida
como o que estamos chamando Cinética e que contém a Estática como caso particular associada
a movimentos que envolvam aceleração nula, em relação a referenciais inerciais, (p. ex., [26],
[19]); mas essas abordagens não são recomendáveis para um curso de primeiro ano, sendo
deixadas para um segundo curso sobre o mesmo assunto com uma “roupagem” mais sofisticada,
para a qual é importante o entendimento da “roupagem” atual para que se possa melhor entendê-la.
233
“ADT-MF” — 2005/11/7 — 8:51 — page 234 — #234
234
Capítulo 5. Mecânica
de Newton. A segunda (2a ) lei que usa a massa do corpo foi apenas enunciada
para completar o conjunto das três leis de Newton.
Devemos agora iniciar esta segunda parte do curso com o estudo da Dinâmica.
Para estudarmos o movimento dos corpos supomos inicialmente que eles
tenham dimensões muito pequenas em relação as distâncias percorridas; sendo
assim, as dimensões do corpo podem ser desprezadas, significando tal fato
que podemos tratar o corpo como um ponto geométrico dotado de massa. Em
geral, se define como ponto material ou partícula um ponto geométrico dotado
de massa. 3
É claro que na cinemática não precisamos mencionar a massa do ponto,
pois o movimento é estudado independentemente das forças que o ocasionam,
não se usando a segunda lei de Newton. Convém entretanto, de um ponto de
vista da psicologia da aprendizagem, mencionar este fato para evitar confusões
futuras na aplicação dos conceitos. Com efeito, no estudo do movimento de um
ponto geométrico, basta mencionar os sistemas de referências ou referenciais
aos quais se relaciona o movimento do ponto. Entretanto, as leis da Mecânica
(leis de Newton) pressupõem a “existência” e o “uso” de um sistema de referência “inercial”, isto é, um sistema de referência constituído de eixos que não
estejam “acelerados”, que se movam apenas sob a ação da “inércia”, isto é, tenham um movimento retilíneo e uniforme ou que esteja parados (em repouso)
em relação a um sistema inercial de referência (1a lei), que alguns autores consideram “absoluto” e imóvel no próprio espaço que constitui o Universo. Tal
conceito é muito difícil e a realização de um tal sistema é impossível na prática. Para estabelecermos o conceito de referencial inercial e suas restrições,
vamos voltar ao Newton, quando examina os conceitos de espaço e de tempo.
Diz ele:
. O espaço absoluto, na sua verdadeira natureza, sem levar em conta
qualquer coisa externa, permanece sempre uniforme e imóvel.
. O tempo absoluto, verdadeiro e matemático, por si mesmo, e pela sua
natureza, flui uniformemente sem levar em conta qualquer coisa externa,
e denomina-se também duração.
3
u Para um primeiro curso, a definição adotada é oportuna e suficiente. Porém, há outra
forma para caracterizar partícula, mas que precisa do conhecimento do teorema do centro de
massa que ainda não estudamos. Indicamos apenas essa outra definição: se abstrai um corpo
como partícula quando se pode localizá-lo por meio de seu centro de massa e se abstrai efeitos
de rotação e de deformação do corpo, associando-lhe a massa total do corpo, localizando-a no
centro de massa do corpo.
“ADT-MF” — 2005/11/7 — 8:51 — page 235 — #235
235
Vemos assim que na mecânica de Newton o espaço é absoluto e permanece
sempre igual a si mesmo e imóvel; um sistema adequado de referência para
as leis da mecânica seria aquele que estivesse em repouso nesse espaço absoluto, tal sistema seria um sistema absoluto de referência, e qualquer outro com
movimento retilíneo e uniforme em relação ao sistema absoluto de referência
seria igualmente adequado para exprimir as leis da Mecânica. Esses sistemas
seriam pois “inerciais”. Entretanto, determinar tal sistema absoluto de referência é impossível, pois não conhecemos o espaço absoluto, nem o Universo;
não se tendo portanto um processo para “fixar” um sistema de eixos no espaço
absoluto ou no Universo.
Vejamos, porém, se podemos contornar o problema. A segunda lei de Newton diz que:
. A variação do momentum linear é proporcional à força atuante e se
efetua na direção da linha reta ao longo da qual a força atua.
Matematicamente:
d~p
F~ = k
,
dt
sendo k um coeficiente de proporcionalidade (dimensionado) e ~p o momentum
linear da partícula de massa m e velocidade ~v, tal que ~p ≡ m~v. Na mecânica
de Newton a massa da partícula não varia com a força aplicada nem com a
velocidade tampouco com o tempo, portanto:
d~v
d
m ~v = k m
= k m ~a ,
F~ = k
dt
dt
sendo ~a a aceleração da partícula. Adotando-se um sistema de unidades conveniente (o SI, por exemplo) de modo que k = 1 (adimensional). Desse modo,
pode-se escrever a segunda lei de Newton sob a forma: F~ = m~a.
A segunda lei de Newton permanece a mesma seja qual for o sistema de
referência inercial que se use para calcular (ou medir) a aceleração da partícula.
Diz-se que ela é invariante em relação às transformações de um referencial
para outro.
De fato, quando passamos de um dado referencial para outro que se move
~ acrescentamos à velociem relação ao primeiro com velocidade constante V,
dade ~v da partícula no primeiro a velocidade do novo referencial com o sinal
~ a partícula fica pois com a velocidade ~v 0 = ~v − V
~ em relação ao
trocado −V,
segundo referencial; veremos este fato mais tarde. Ora, sendo a velocidade re~ constante, a aceleração da partícula no segundo referencial é, porém,
lativa V
“ADT-MF” — 2005/11/7 — 8:51 — page 236 — #236
236
Capítulo 5. Mecânica
a mesma que a medida do primeiro:
~a 0 =
~
d~v 0 d~v dV
d~v
=
−
=
= ~a ,
dt
dt dt
dt
~ é nula, dV~ = ~0. Portanto em nosso
pois a derivada da velocidade constante V
dt
novo referencial a força F~ que atua sobre a partícula continua a mesma:
F~ 0 = m~a 0 = m~a = F~ .
A expressão da segunda lei fica portanto a mesma quando passamos para outro
referencial inercial. Ela é pois invariante em relação às transformações de um
referencial inercial para outro. 4
Se não houver forças atuantes numa partícula, ou ela se moverá como movimento retilíneo e uniforme, ou estará em repouso, sua posição sendo determinada num referencial inercial. Se quisermos, porém, usar a segunda lei
de Newton para classificarmos o nosso referencial como inercial caímos numa
tautologia 5 : a partícula está em repouso ou em movimento retilíneo e uniforme
num referencial inercial se não houver nenhuma força atuante sobre ela, e o
referencial é inercial se a partícula sobre a qual não atua nenhuma força se
move com movimento retilíneo e uniforme.
Essa tautologia desaparece, porém, se pudermos dizer, independentemente
do referencial, quando não existe nenhuma força (de interação) atuando sobre
a partícula. Vejamos se isso é possível.
Sabemos que as forças que atuam entre partículas são basicamente de duas
naturezas: forças de contacto e forças à distância. As forças à distância são de
4
u
u
Ver Apêndice E, para um fragmento de texto original de Galileu.
Tautologia é uma proposição cujo valor lógico é sempre verdade. Segundo o
Dicionário do Aurélio [6, acepções 3 e 4]:
1. Vício de linguagem que consiste em dizer, por formas diversas, sempre a mesma
coisa.
2. Filos. Proposição que tem por sujeito e predicado um mesmo conceito, expresso ou
não pelo mesmo termo.
3. Lóg. Raciocínio que consiste em repetir com outras palavras o que se pretende
demonstrar.
4. Lóg. Função lógica que sempre se converte em uma proposição verdadeira sejam
quais forem os valores assumidos por suas variáveis.
Segundo o Dicionário Houaiss [20, acepção 2]: 2. Rubrica: lógica.
proposição analítica que permanece sempre verdadeira, uma vez que o atributo é uma
repetição do sujeito.
5
“ADT-MF” — 2005/11/7 — 8:51 — page 237 — #237
237
natureza gravífica, elétrica, magnética ou eletromagnética. Entretanto, a existência das forças não-gravíficas implica a existência das forças gravíficas, pois
as forças não-gravíficas provêem de suportes materiais e, desse modo, se, sobre uma partícula não atua nenhuma força gravífica, segue-se que não atuará
também nenhuma outra força do tipo de ação à distância, pois não há o suporte
material necessário. A lei da atração universal de Newton diz que duas partículas de massa m1 e m2 , à distância r uma da outra, atuarão uma sobre a outra
com uma força de intensidade
f =γ
m1 m2
,
r2
proporcional ao produto das massas e inversamente proporcional ao quadrado
da distância. Essa força descreve matematicamente o campo gravífico. Seguese que, se a distância for muito grande, podemos desprezar a ação gravífica, ou
o campo gravífico produzido pela partícula.
Podemos, então, considerar uma região no espaço infinito, que esteja suficientemente afastada de todos os corpos do Universo, para que aí (lá) o campo
gravífico seja nulo (teoricamente, infinitamente afastada) ou completamente
desprezível, isto é, a uma distância tão grande que o “resíduo” do campo não
tenha nenhuma influência mensurável nas medições que se possam efetuar.
Ora, uma partícula colocada nessa região estaria sob a ação de forças desprezíveis ou nulas, e portanto teria um movimento retilíneo e uniforme, ou estaria
em repouso, no hipotético sistema absoluto de Newton.
Segue-se que ela poderia servir para estabelecer o nosso sistema referencial
inercial. De fato, um dado sistema S de referência será inercial se ele estiver em
repouso ou em movimento retilíneo e uniforme em relação à partícula colocada
numa região do espaço livre de forças gravíficas, isto é, muito ou infinitamente
afastada de todos os corpos do Universo.
Vejamos agora, na prática, o que ocorre. Do ponto de vista prático, a construção anterior é inoperante. De fato, como vamos localizar e verificar o movimento de uma partícula no infinito? Resta, porém, a aproximação de tomar uma
partícula muito afastada das outras, o afastamento dependendo da precisão que
se deseja no estudo e aplicação das leis da mecânica. Assim, podemos tomar
um sistema de eixos ligados à Terra como inercial; por exemplo, num dado
local, tomamos a vertical dirigida para cima como eixo Oz, e duas direções ortogonais no plano horizontal do lugar 6 , como eixos Ox e Oy. Esses sistemas de
eixos para os trabalhos e aplicações técnicas podem ser considerados inerciais.
6
u Esse é apenas um exemplo, nada nos obriga a usar, na vizinhança da Terra, sistemas
de coordenadas que tenham eixos verticais e horizontais; é bom ter isso sempre em mente.
“ADT-MF” — 2005/11/7 — 8:51 — page 238 — #238
238
Capítulo 5. Mecânica
Se, porém, a precisão das medições aumenta, esse sistema de eixos não serve,
a rotação da Terra introduz uma “força de inércia”: a força centrífuga e a força
de Coriolis (p. ex.) devem ser levadas em conta. Podemos então tomar um outra
aproximação dada por um sistema de eixos em que o eixo Oz seja coincidente
com o eixo de rotação da Terra, a origem no centro de massa da Terra, os eixos
Ox e Oy em duas direções normais, no plano equatorial da Terra, o eixo Ox na
direção do Sol. Já é uma boa aproximação do caso ideal, o centro de massa da
Terra, estando muito distante de outras “partículas” do Universo, desloca-se
em torno do Sol, mas o raio da órbita terrestre em seu movimento em torno
do Sol é tão grande em relação às dimensões terrestres que pode ser considerado infinito para o tipo de problema tratado. De fato, a órbita terrestre tem um
raio aproximado de 1,5×108 km (cento e cinqüenta milhões de quilômetros);
para problemas locais esta distância pode ser considerada infinita. Entretanto,
a precisão pode ainda ser pequena se levarmos em conta, por exemplo, o movimento dos corpos do sistema solar. Neste caso, pode-se tomar o sistema de
Copérnico, isto é, o sistema de referência que tem sua origem no centro de
massa do sistema solar (muito vizinho do centro de massa do próprio Sol) e
os eixos seriam três eixos que ligam esse ponto a três estrelas “fixas”. Ora, o
centro de massa do sistema solar está muitíssimo distante dos outros corpos
celestes, a estrela mais próxima, a Próxima do Centauro, estando a 4 anos luz
do Sol, isto é, a cerca de 4×1013 km, pode ser assim considerado um bom sistema inercial. Mas, por sua vez, o Sol avança na direção da Constelação de
Hércules, no seu movimento de rotação em torno do centro de nossa galáxia,
o qual está a uma distância de 25.000 anos luz, ou seja, 2,5×1017 km. O Sol
completa um volta em sua órbita em 200 milhões de anos. Vê-se, deste modo,
que, para todos efeitos mecânicos do nosso sistema planetário, o sistema de
referência de Copérnico é um bom referencial, o raio da órbita solar podendo
ser considerado infinito e o Sol, em seu movimento retilíneo e uniforme.
Entretanto, convém notar, se ele não é ainda um sistema inercial, no sentido rigoroso da palavra, serve, porém, para todas as aplicações da Mecânica
Newtoniana. As leis da Mecânica Celeste deduzidas das leis de Newton (leis
de movimento e da gravitação), mostram a validade de tomarmos o sistema de
Copérnico como inercial, pois os erros acumulados durante séculos de observação celeste teriam revelado discrepâncias resultantes da aproximação indevida.
Apenas o movimento de Mercúrio, isto é, do no avanço do periélio de Mercúrio, há uma diferença não explicável pela Mecânica Clássica, o que mostra
que há alguma falha na Mecânica Newtoniana, não no sistema de Copérnico.
Veremos adiante qual a causa por traz dessa discrepância.
“ADT-MF” — 2005/11/7 — 8:51 — page 239 — #239
239
Para darmos uma idéia da precisão dos resultados, vejamos alguns dados
numéricos relativos ao periélio de Mercúrio.
Como se sabe, os planetas do sistema solar descrevem órbitas elípticas em
torno do Sol, que ocupa um dos focos dessa elipse. A elipse da órbita se aproxima de um círculo, de modo que podemos tomar, por exemplo, a órbita da
Terra como circular em primeira aproximação. Na Fig. 5.1, porém, exageramos a excentricidade da órbita para que se compreenda mais facilmente o que
asseveramos. O eixo maior da elipse corta a elipse nos pontos P e A, o Sol estando no foco S . O ponto P mais próximo do Sol sobre a trajetória do planeta
se denomina periélio, o ponto mais afastados, ponto A, denomina-se afélio.
Figura 5.1: Precessão de órbita elíptica; S: o Sol no foco; P: periélio; A: afélio.
A trajetória elíptica do planeta é calculada pela Mecânica Newtoniana com
toda precisão e vai corresponder quase exatamente à trajetória descrita pela
planeta, só não é exata porque as forças atrativas dos outros planetas “perturbam” essa trajetória, fazendo com que ela se desloque, girando em forno do
Sol, executando um movimento de “precessão”. Tal fato significa que o periélio após um certo tempo não estará mais no ponto P, mas sim em P0 , tendo
avançado ; esse avanço é medido pelo ângulo θ, veja Fig. 5.1, e pode ser calculado com toda precisão pela Mecânica Newtoniana, levando em conta a força
gravífica de outros planetas e pode ser medido pelos métodos de observação
astronômica. O valor desse ângulo calculado para um século é de 529,200 (quinhentos e vinte nove segundos e dois décimos) para o planeta Mercúrio, e o
valor observado é 572,700 . A diferença de 42,5 segundos de arco por século é
extremamente pequena, mas muito bem estabelecida, e não é explicável pela
“ADT-MF” — 2005/11/7 — 8:51 — page 240 — #240
240
Capítulo 5. Mecânica
Mecânica Clássica. Não está ligada ao fato de o sistema de Copérnico não ser
exatamente um sistema inercial, uma vez que os avanços por segundo do periélio de Vênus (27600 /século), da Terra (9000 /século) e de Júpiter (15300 /século)
são calculados pela Mecânica Clássica e confirmados pela observação astronômica. Há assim qualquer coisa de mais fundamental nessa discrepância relativamente á órbita de Mercúrio. Estabelecemos agora em bases mais sintéticas
o que foi visto até aqui.
5.1
Sistema de Referência Galileanos
Observe-se que nas considerações precedentes procuramos desenvolver a noção de sistema inercial sem nos prendermos a considerações sobre o tempo t.
Implicitamente o tempo t é o tempo absoluto de Newton, que seria o mesmo
para qualquer sistema inercial.
Ora, dado um sistema inercial, qualquer outro referencial que se mova em
relação a ele com movimento uniforme também é inercial. Se considerarmos
o mesmo tempo t em todos sistemas inerciais, teremos, para cada referencial
inercial, que cada ponto P terá três coordenadas espaciais e um parâmetro independente que é o tempo t.
Figura 5.2: Sistemas de coordenadas associados aos sistemas inerciais S e S0 .
Observe-se que para o estudo do movimento de um ponto no espaço teremos que considerar quatro variáveis independentes: sua três coordenadas espaciais e o tempo t. O tempo t não é comummente mencionado porque ele é
considerado o mesmo para qualquer sistema de referência. Para fixarmos idéia,
vamos supor que dois sistemas de referência sejam constituídos, cada um deles, por três eixos triortogonais cartesianos Oxyz e O0 x0 y0 z0 , e do tempo t e t0 ;
“ADT-MF” — 2005/11/7 — 8:51 — page 241 — #241
241
5.1. Sistema de Referência Galileanos
os sistemas de referência serão então: S(x y z t) e S0 (x0 y0 z0 t0 ). Vamos supor
que os eixos coordenados do sistema S se desloque com velocidade ~v constante e paralela ao eixo O0 x0 do sistema S0 , isto é, o movimento é constituído
de um deslizamento do eixo Ox sobre o eixo O0 x0 com velocidade ~v constante,
os outros dois eixos coordenados permanecendo sempre paralelos (veja Fig. 5.2). É fácil ver que as relações para transformação das coordenadas S(x y z t)
de um ponto P em S para suas coordenadas S0 (x0 y0 z0 t0 ) em S0 serão: 7
0
x = x + vt
y0 = y
(5.1)
z0 = z
t0 = t
O tempo t0 em S0 podendo ser considerado o mesmo que em S, desde que
acertem os dois relógios em S e S0 para medir a mesma hora, caso contrário,
t0 = t+t0 . As expressões de transformação dos dois sistemas mostram que se S
é inercial, S0 também o é.
Tais sistemas inerciais de referência, com quatro coordenadas, x, y, z, t e
x0 , y0 , z0 , t0 , são denominados sistemas galileanos de referência, as transformações (5.1) são denominadas transformações galileanas.
Se porém a velocidade ~v não é paralela ao eixo Ox, mas tem três componentes, não necessariamente nulas, (α0 β0 γ0 ) em relação a S0 , então cada
coordenada em S0 irá variar no tempo do mesmo modo que x0 em (5.1), isto é,
teremos:
0
x
y0
z0
t0
= x + α0 t
= y + β0 t
= z + γ0 t
=t
(5.2)
Os três eixos Oxyz deslocando-se paralelamente a si mesmos.
Se considerarmos que os eixos de S assumam direções que façam ângulos
cujos cossenos diretores sejam αi , βi , γi (i = 1, 2, 3) respectivamente com as
primitivas direções, então as transformações serão:
0
x = α1 x + α2 y + α3 z + α0 t
y0 = β1 x + β2 y + β3 z + β0 t
(5.3)
z0 = γ1 x + γ2 y + γ3 z + γ0 t
t0 = t
7
u
Estaremos usando a notação: v = |~v | .
“ADT-MF” — 2005/11/7 — 8:51 — page 242 — #242
242
Capítulo 5. Mecânica
Essas expressões, (5.3), são as transformações mais gerais entre dois sistemas de referência galileanas S(x y z t) e S0 (x0 y0 z0 t0 ). São denominadas transformações galileanas entre os dois sistemas inerciais, essas transformações
forma um grupo denominado grupo galileano de transformações, ou grupo de
transformações de Galileu. Podemos então dizer:
“As leis da Mecânica Newtoniana são invariantes para o grupo
de transformações galileanas”.
Esta é a expressão do chamado Princípio da Relatividade de Galileu.
O princípio da relatividade de Galileu, expresso pela invariância dos fenômenos mecânicos diante das transformações (5.3), em que t0 = t, satisfaz também
ao conceito de tempo absoluto de Newton.
Observe-se ainda que se uma partícula se move com velocidade ~u paralela
ao eixo Ox do sistema galileano S, que se move com velocidade ~v em relação a outro sistema S0 , o eixo Ox deslizando com velocidade ~v ao longo do
eixo O0 x0 , transformação galileana dada em (5.1), então a velocidade ~u 0 dessa
partícula em (relação a) S0 será dada por:
~u 0 = ~u + ~v .
Ora, do ponto de vista dos fenômenos naturais, deve-se supor que, não somente os fenômenos mecânicos observados sejam invariantes, mas que todos
os restantes fenômenos físicos devam obedecer o Princípio de Relatividade
Galileano.
Entretanto, na Ótica e na Eletrodinâmica aparecem fenômenos que não
satisfazem o princípio da relatividade de Galileu.
Assim, as leis expressas pelas equações de Maxwell, que formam a base
para a teoria eletromagnética dos fenômenos luminosos, e que estão para o
Eletromagnetismo como as leis de Newton estão para a Mecânica, não são
invariantes para as transformações galileanas.
Por outro lado, as pesquisas de Michelson e Morley mostram que a velocidade da luz no vácuo, indicada por c, é uma constante universal que tem o
mesmo valor 8 para qualquer sistema galileano.
De fato, a Terra em sua órbita em torno do Sol pode ser considerada, para
um trajeto suficientemente curto, como um sistema galileano em relação ao
8
u O sistema internacional de unidades (SI) adotou o valor c = 299.792.458 m/s, como
valor exato, para a velocidade da luz no vácuo e lhe conferiu o símbolo c; o metro passou a ser
definido a partir desse valor para a velocidade da luz (1983, pela 17a CGPM, cf. [29]).
“ADT-MF” — 2005/11/7 — 8:51 — page 243 — #243
243
5.2. Transformação de Lorentz
sistema de Copérnico, deste modo, pode, ao logo de sua órbita, fornecer diferentes sistemas galileanos. Observe-se que, se sua velocidade é ~v num dado
ponto, seis meses depois será −~v (a órbita da Terra é praticamente circular).
Assim, a velocidade da luz proveniente das estrelas e medida sobre a Terra
deveria ser no primeiro caso c0 = c−v, se a luz tivesse a o mesmo sentido de ~v,
e no segundo caso c00 = c+v.
As pesquisas experimentais de Michelson e Morley mostraram que a velocidade da luz proveniente das estrelas tinha sempre o mesmo valor c, qualquer
que fosse o ponto da trajetória da Terra em que fosse medida. No caso acima,
ficou constatado que c00 = c0 = c. Esse valor sendo obviamente um valor máximo para a velocidade da luz no vácuo e que não podia ser ultrapassado. A
velocidade da luz no vácuo é assim um invariante relativamente a Sistemas
Galileanos, mas não o é em relação às transformações de Galileu, pois à sua
velocidade dever-se-ia acrescentar a do sistema, como se viu. É um fato paradoxal, mas indiscutível, pois se trata de determinação experimental irrefutável.
5.2
Transformação de Lorentz
O fato anterior e outros resultados com elétrons em movimento em campos elétricos e magnéticos levaram o físico holandês Hendrik Antoon Lorentz (1853–
1928) a estabelecer a expressão da transformação entre as variáveis de um
sistema inercial S(x y z t) para outro S0 (x0 y0 z0 t0 ) que se mova em relação ao
primeiro com velocidade ~v, os eixos coincidentes para t = 0, o movimento
consistindo de um deslizamento do eixo O0 x0 sobre o eixo Ox. As expressões
obtidas por Lorentz foram:
x0
y0
0
z
t0
x − vt
= r
v 2
1−
c
=y
=z
v
t− 2 x
c
= r
v 2
1−
c
(5.4)
Essas expressões desempenham o mesmo papel que as transformações de Galileu, ou galileanas, (5.1), e se denominam transformações de Lorentz.
“ADT-MF” — 2005/11/7 — 8:51 — page 244 — #244
244
Capítulo 5. Mecânica
Observe-se que por essas expressões a velocidade da luz é a mesma em
qualquer referencial. De fato, se a velocidade da luz no sistema S é c, então, no
intervalo de tempo ∆t no sistema S, o sinal luminoso vai percorrer a distância
∆x = c ∆t, logo, em S0 , pela primeira equação em (5.4):
(c − v) ∆t
∆x0 = r
v 2
1−
c
(5.5)
e, pela quarta equação (5.4):
v
1 − 2 c ∆x
∆t0 = r c ,
v 2
1−
c
(5.6)
desse modo, sua velocidade no sistema S0 será:
c0 =
(c − v) (c − v)
∆x0
=
c = c,
=
0
(c − v)
∆t
1 − vc
o que está de acordo com os resultados experimentais de Michelson e Morley.
As transformações de coordenadas que deixam invariante a velocidade da luz
para dois sistemas inerciais não são as transformações de Galileu, mas sim as
transformações de Lorentz.
As transformações (5.4), cuja dedução será vista mais tarde no curso de
Física, são um caso particular de transformações de Lorentz mais gerais entre
dois sistemas inerciais quaisquer e que são indicadas adiante nas 4 relações em
(5.8).
Supondo que os dois sistemas tenham as origens coincidentes, O0 ≡ O,
em t = 0, o sistema movendo-se com velocidade (constante) ~v qualquer, e que
nesse instante, t = 0, se origine um sinal luminoso. Ambos observadores, um
estacionado em S e outro em S0 , verão o sinal luminoso se propagar com
velocidade c, seja em S, seja em S0 , de modo que, após o intervalo de tempo t
em S e t0 em S0 , o sinal terá percorrido a distância r em relação a S e a r0 em
S0 , sendo:
r2 = x2 + y2 + z2
r0 2 = x0 2 + y0 2 + z0 2
“ADT-MF” — 2005/11/7 — 8:51 — page 245 — #245
245
5.2. Transformação de Lorentz
e se tem que: r = ct e r0 = ct0 , portanto:
x2 + y2 + z2 = c2 t2
x0 2 + y0 2 + z0 2 = c2 t0 2 .
Ora, qualquer que seja o sistema de referência, a expressão:
x2 + y2 + z2 − c2 t2 = 0 = x0 2 + y0 2 + z0 2 − c2 t0 2 .
(5.7)
Como estamos tratando as variáveis x, y, z, t como coordenadas, para uniformizar a escritura, podemos por:
0
x
=
x
x1 = x0
1
0
0
x2 = y
0 x2 = y
S:
S
:
x3 = z
x30 = z0
x4 = i c t
x0 = i c t 0 ,
4
√
em que i = −1, desse modo, as relações em (5.7) podem ser escritas:
x1 2 + x2 2 + x3 2 + x4 2 = x10 2 + x20 2 + x30 2 + x40 2
ou, equivalentemente, sob forma mais compacta:
4
X
x` 2 =
`=1
4
X
x`0 2 .
`=1
As transformações entre as coordenadas em S e em S0 serão:
xi0 = ai1 x1 + ai2 x2 + ai3 x3 + ai4 x4 ,
i ∈ {1, 2, 3, 4}, ou de maneira mais compacta:
x`0 =
4
X
a` j x` ,
(5.8)
`=1
os coeficientes ai j são constantes, de modo que as transformações são transformações lineares.
As transformações (5.8), entre os sistemas de coordenadas
(x1 x2 x3 x4 ) em S
e
(x0 1 x0 2 x0 3 x0 4 ) em S0 ,
“ADT-MF” — 2005/11/7 — 8:51 — page 246 — #246
246
Capítulo 5. Mecânica
P
P
em que x4 = ict, e tal que x` 2 = x0 ` 2 é um invariante, denominam-se
transformações de Lorentz, elas formam um grupo, o denominado grupo de
transformações de Lorentz. A transformação em (5.4) é um caso particular de
transformação de Lorentz.
O fato de que os efeitos eletrodinâmicos, como o fenômeno luminoso, propagam-se sempre, no vácuo, com velocidade finita c, constante, mostra que
se devem substituir as transformações galileanas por transformações lorentzianas. Assim, o princípio da relatividade de Galileu deve ser substituído pelo
princípio da relatividade de Lorentz ou da Eletrodinâmica, que exprime o fato
acima.
Ocorre que as leis do eletromagnetismo, as leis de Maxwell9 , são invariantes para as transformações de Lorentz; a expressão F~ = m~a não o é. Essa
expressão, supondo a massa m da partícula constante, deve ser substituída pela
expressão estabelecida por Newton:
d~p
,
F~ =
dt
onde ~p = m ~v .
A mecânica deverá ser reformulada, e sua reformulação segundo essa direção, realizada por Einstein10 , originou a Mecânica Relativística, a Relatividade. A Mecânica Newtoniana é um caso limite da Mecânica Relativística, as
transformações de Lorentz reduzindo-se às transformações de Galileu quando
nelas se faz o limite11 para c → ∞.
Não é objetivo deste curso desenvolver a mecânica relativística, o escopo
desta introdução é deixar o espírito do estudante aberto para reformulações
da Mecânica Newtoniana mais tarde; convém entretanto dizer que o êxito da
Mecânica Relativística foi completo na explicação de alguns efeitos que a Mecânica de Newton não explicava, como por exemplo, o caso do avanço do
periélio de Mercúrio. De fato, as determinações da órbita de Mercúrio relativísticamente eliminam o erro nas determinações da Mecânica Newtoniana.
Como vimos, havia uma diferença de 43,5 segundos de arco por século no
avanço do periélio de Mercúrio, calculado usando a Mecânica Newtoniana. A
Mecânica Relativística corrige este erro, acrescentado o valor 42,9 segundos
de arco por século; a diferença entre o valor observado e o valor calculado
sendo assim de 0,6 segundo de arco por século, o que pode ser atribuído ao
erro experimental.
9
James Clerk Maxwell (1831–1879), físico escocês.
Albert Einstein (1875–1955), físico alemão.
11
Princípio de correspondência de Bohr. Niels Henrik David Bohr (1885–1962), físico dinamarquês.
10
“ADT-MF” — 2005/11/7 — 8:51 — page 247 — #247
5.2. Transformação de Lorentz
O êxito da Mecânica Relativística indica que a Mecânica Newtoniana deve
ser substituída pela Mecânica Relativística quando a velocidade das partículas
se aproximam da velocidade da luz ou as distâncias envolvidas são cosmológicas. Entretanto, para pequenas velocidades e distâncias não-cosmológicas ou
muito maiores que as distâncias atômicas, a mecânica oferece um instrumento
adequado e perfeito do ponto de vista humano para o trato dos problemas mecânicos.
247
“ADT-MF” — 2005/11/7 — 8:51 — page 248 — #248
248
Capítulo 5. Mecânica
“ADT-MF” — 2005/11/7 — 8:51 — page 249 — #249
Capítulo 6
Cinemática
Como vimos, a Cinemática estuda o movimento dos corpos sem levar em conta
as causas desse movimento, isto significa que podemos desenvolver o estudo
do movimento sem apelar para os sistemas de referência inerciais; qualquer
sistema de referência, acelerado ou não (girando ou não), poderá servir para o
estudo de um ponto, ou de um corpo, a segunda lei não sendo sequer mencionada.
Para o estudo do movimento se toma em geral um sistema triortogonal
cartesiano, outros sistemas de coordenadas podem ser usados (ortogonais ou
não), não havendo, do ponto de vista teórico, nenhuma preferência para qualquer deles; o tipo de problema (e das simetrias envolvidas no problema) é que
determinará (ou recomendará) a escolha do sistema de coordenadas no referencial. Assim, podemos usar os sistemas de coordenadas esférico-polares, ou
cilíndricas, com vantagem sobre o sistema triortogonal cartesiano quando se
tratam de problemas em que exista simetria esférica ou cilíndrica respectivamente. Teremos ocasião de mostrar tais fatos no curso.
A cinemática no espaço de três dimensões não será desenvolvida agora,
seu estudo sendo feito no curso de Mecânica Geral, aqui, desenvolveremos o
estudo no espaço de duas dimensões, isto é, no plano, afinal, para descrever o
movimento de um ponto no plano bastam dois eixos coordenados.
249
“ADT-MF” — 2005/11/7 — 8:51 — page 250 — #250
250
Capítulo 6. Cinemática
6.1
Sistema de coordenadas no plano
Tomemos para localizar um ponto P qualquer do plano um sistema de coordenadas
ortogonal cartesiano, S(Oxy), veja Fig. 6.1, e um sistema vetorial de referência.
O sistema vetorial de referência, veja Fig. 6.2, é obtido do seguinte modo: seja P um
ponto genérico do plano, um sistema vetorial de referência será obtido dando-se
uma origem uma origem O, o ponto P será
então dado pelo segmento de reta orien- Figura 6.1: Localização do ponto P
−−→
tado OP que tem origem em O e extremi- pelas coordenadas (x, y).
dade em P, esse segmento de reta orientado se denomina vetor posição, ou raio
vetor, de P (em relação ao ponto O). O conjunto de todos os vetores posição dos pontos do plano, a partir de O, quando se define entre eles uma lei de composição pela Figura 6.2: Localização do ponto P
−−→
regra do paralelogramo e de produto por pelo vetor posição ~r = OP.
um escalar do corpo hR, +, ×i dos reais,
como se viu na 1a parte deste curso (pág. 130), vai formar um espaço vetorial (de vetores localizados no ponto O).
Para distinguir cada raio vetor ~r, podemos, no caso do plano, tomar dois vetores não colineares ~a e ~b, do espaço vetorial considerado (nesse plano), e obter
as componentes de ~r, segundo as direções de ~a e de ~b, ver Fig. 6.3. Teremos:
Figura 6.3: O vetor posição ~r, do ponto P em relação ao ponto O, como
combinação linear de ~a e de ~b.
∃λ1 , λ2 ∈ R ;
~r = λ1 ~a + λ2 ~b ,
em que ~a e ~b se denominam vetores-base
do espaço vetorial definido no ponto O,
e λ1 e λ2 as coordenadas (ou projeções, não necessariamente ortogonais) do
vetor posição ~r em relação à base (~a, ~b). É claro que dois outros vetores ~a 0
e ~b 0 , não-colineares quaisquer, podem constituir uma outra base no mesmo
espaço vetorial, as coordenadas de ~r sendo então, obviamente, outras.
“ADT-MF” — 2005/11/7 — 8:51 — page 251 — #251
6.1. Sistema de coordenadas no plano
No estudo elementar da Cinemática que
vamos desenvolver, o uso do sistema vetorial de referência será muito restrito, e sempre relacionado com eixos cartesianos ortogonais.
Neste caso, podemos tomar, por exemplo, dois sistemas de eixos com as origens
coincidentes, veja Fig. 6.4. Observe-se que Figura 6.4: Localização de P pelo
−→
o vetor posição ~r , com origem na origem O vetor posição ~r = −
OP.
do sistema ortogonal cartesiano, poderá ser
dado de duas maneiras:
1. Sistema de coordenadas polares –
a) Dá-se o módulo r = |~r | de ~r; e
b) dá-se o ângulo θ que o eixo Ox forma com o raio vetor ~r.
Esse ângulo θ variará entre 0◦ e 360◦ , i.e., θ ∈ (0 rd, 2πrd), de acordo com
a convenção trigonométrica. Isto corresponde a dar duas coordenadas, r
e θ, o ponto P sendo determinado pelo par ordenado 1 (r, θ), temos então
o sistema de coordenadas polares.
2. Sistema de coordenadas cartesianas –
Dão-se as projeções de ~r em relação aos eixos coordenados, escrevendo-se:
~r = x ı̂ + y ̂ ,
em que ı̂ e ̂ são vetores de módulo unitário, tendo a direção e o sentido
dos eixos coordenados; denominam-se versores dos eixos Ox e Oy respectivamente, desse modo, (ı̂, ̂) constituí uma base para o espaço vetorial dos vetores de posição, ligados ao ponto O, e, neste caso, x e y serão
as coordenadas de ~r na base (ı̂, ̂), veja Fig. 6.5. É óbvio também que
x e y serão as coordenadas do ponto P no sistema ortogonal cartesiano
S(Oxy). Esta representação será a mais usada, permitindo-nos passar facilmente do sistema vetorial de referência para o sistema cartesiano de
coordenadas.
1
u O que significa a intersecção do círculo de raio r com origem em O com a semi-reta
com extremidade em O e que faz um ângulo θ com o eixo Ox.
251
“ADT-MF” — 2005/11/7 — 8:51 — page 252 — #252
252
Capítulo 6. Cinemática
Figura 6.5: Representação do vetor posição ~r = xı̂+ y ̂ do ponto P de coordenadas
cartesianas (x, y).
6.2
Movimento de um ponto
Suponhamos que um ponto P de coordenadas (x, y) se mova sobre o plano,
descrevendo uma curva s (qualquer), veja Fig. 6.6.
Figura 6.6: Movimento do ponto P sobre a curva s no plano Oxy.
6.2.1
Trajetória
A curva s, descrita pelo ponto P, denomina-se trajetória 2 de P. A posição do
ponto P sobre a trajetória pode ser obtida em cada instante, relacionando-se
suas coordenadas, (x, y) no plano, com o tempo, t, por meio de funções:
x = x(t)
(6.1)
y = y(t) ,
de tal modo que a cada instante t corresponderá, sobre o plano, a posição de
coordenadas (x, y) do ponto P.
2
u Pode-se fazer distinção entre a trajetória ~r(t) e a curva s = ~r [T], onde T é o intervalo
onde está definido o parâmetro t; a trajetória descreve o modo como a curva s é traçada ou
descrita, ou seja a trajetória ~r(t) ocorre sobre a curva suporte s.
“ADT-MF” — 2005/11/7 — 8:51 — page 253 — #253
253
6.3. Estudo do movimento de um ponto
É claro que o vetor posição ~r também será função do tempo, i.e., ~r =~r (t).
6.2.2
Equações paramétricas da trajetória
As expressões (6.1) se denominam equações paramétricas da trajetória do
ponto P. Eliminando-se o tempo (parâmetro t) entre as equações, obtemos uma
função em x e y apenas, f (x, y) = 0, que será a equação cartesiana da trajetória.
Assim, se o ponto descreve (uniformemente) um círculo em torno da origem,
de raio R, veja Fig. 6.7, as equações paramétricas dessa trajetória serão:
Figura 6.7: Movimento do ponto P sobre a curva s no plano Oxy.
x = R cos(ω t)
y = R sen(ω t) ,
em que ω é uma constante, a chamada velocidade angular, que estudaremos
mais tarde. Ora, x/R = cos(ω t) e y/R = sen(ω t). Elevando ao quadrado e
somando ambos os dois membros dessas igualdades, e levando em conta que
(cos(ω t))2 +(sen(ω t))2 = 1, obtemos:
x2 + y2 = R2 ,
equação cartesiana da trajetória de P.
6.3
Estudo do movimento de um ponto
Suponhamos que no instante t1 o ponto P esteja em P1 e no instante t2 esteja
em P2 , veja Fig. 6.8, os raios vetores correspondentes serão:
~r1 = ~r(t1 )
e
~r2 = ~r(t2 ) .
“ADT-MF” — 2005/11/7 — 8:51 — page 254 — #254
254
Capítulo 6. Cinemática
O vetor
∆~r ≡ ~r(t2 ) − ~r(t1 ) = ~r2 − ~r1
se denomina vetor deslocamento do ponto P durante o intervalo de tempo
∆t = t2 −t1 .
Figura 6.8: Vetores posição ~r do ponto P, em relação ao ponto O sobre a curva s, nos
instantes t1 e t2 e seu deslocamento ∆~r.
Denomina-se vetor velocidade média, ~vm , à razão: 3
~vm =
∆~r
1
1
~r (t2 ) − ~r (t1 ) =
~r (t1 ) − ~r (t2 ) .
=
∆t t2 − t1
t1 − t2
Para um estudo mais fácil da Cinemática vamos começar com o movimento
Figura 6.9: Ponto P em movimento retilíneo (os deslocamentos ∆~r são sempre paralelos).
3
u
Note-se que
∆~r
1
1
~r (t2 ) − ~r (t1 ) =
~r (t1 ) − ~r (t2 ) .
=
∆t
t2 − t1
t1 − t2
“ADT-MF” — 2005/11/7 — 8:51 — page 255 — #255
255
6.3. Estudo do movimento de um ponto
sobre a reta, veja Fig. 6.9. O conceito é idêntico 4 .
Vamos porém projetar o movimento sobre os dois eixos cartesianos ortogonais Ox e Oy, obtendo-se as componentes do vetor deslocamento sobre os
eixos. Como ~r1 = x1 ı̂ + y1 ̂ e ~r2 = x2 ı̂ + y2 ̂, em que (x1 , y1 ) e (x2 , y2 ) são as
coordenadas de P1 e P2 respectivamente, teremos:
∆~r = ~r2 − ~r1
= (x2 ı̂ + y2 ̂) − (x1 ı̂ + y1 ̂)
= (x2 − x1 ) ı̂ + (y2 − y1 ) ̂
∆~r = ∆x ı̂ + ∆y ̂ ,
tendo-se posto: ∆x = x2 − x1 e ∆y = y2 −y1 .
Durante o intervalo de tempo ∆t = t2 −t1 , a velocidade média ~vm do ponto
P será:
!
!
∆x
∆y
∆~r
~vm =
=
ı̂ +
̂ .
∆t
∆t
∆t
∆y ~
As razões ~vmx = ∆x
ı̂
e
v
=
m
y
∆t
∆t ̂ sendo os vetores velocidades médias
caracterizadas que as projeções dos pontos P1 e P2 sobre os eixos dos x (P01 e
00
P02 ) e sobre os eixos dos y (P00
1 e P2 ) têm respectivamente sobre esses eixos.
∆x
e vmy = ∆y
É claro que vmx = ∆t
∆t são números reais (R) positivos ou negativos, conforme os sentidos dos vetores correspondentes sejam o mesmo ou o
contrário ao dos eixos Ox e Oy. Tal fato significa que eles, com sinal positivo
ou negativo, darão o sentido, a direção e o valor do módulo dos correspondentes vetores componentes da velocidade média sobre os eixos Ox e Oy, de
modo que o vetor ~vm pode ser indicado pelo par de números reais vmx e vmy ,
ou pelo par ordenado 5 (vmx , vmy ). A igualdade vetorial se transforma em duas
igualdades algébricas numéricas:
~vm =
∆~r ~r2 − ~r1
=
∆t
t2 − t1
⇒
∆x
=
vm x =
∆t
∆y
=
vmy =
∆t
x2 − x1
t2 − t1
y2 − y1
t2 − t1
4
u A vantagem para o aprendizado é que, em um movimento retilíneo, todos os desloca
mentos são paralelos. Além disso, a projeção de um movimento qualquer sobre cada eixo coordenado é sempre um movimento retilíneo, assim todo movimento poderá ser encarado sempre
como superposição (vetorial) de movimentos retilíneos.
vm
5
u Alternativamente: pela matriz linha vm x vmy , ou pela matriz coluna x .
vmy
“ADT-MF” — 2005/11/7 — 8:51 — page 256 — #256
256
Capítulo 6. Cinemática
ou ainda
~r2 − ~r1 = ~vm (t2 − t1 )
⇒
~r2 = ~r1 + ~vm (t2 − t1 )
⇒
x2 − x1 = vmx (t2 − t1 )
y2 − y1 = vmy (t2 − t1 )
x2 = x1 + vmx (t2 − t1 )
y2 = y1 + vmy (t2 − t1 ) .
(6.2a)
(6.2b)
As expressões acima permitem calcular o deslocamento do ponto no espaço durante o intervalo de tempo ∆t = t2 − t1 , mas não o espaço percorrido
neste intervalo de tempo.
Usa-se em português, comummente, o termo velocidade com duas acepções diferentes, uma delas é o estabelecido acima de grandeza vetorial, o outro
de espaço percorrido por unidade de tempo. Há porém dois termos correspondentes a “espaço percorrido por unidade de tempo” e que são celeridade e
rapidez. Na Física podemos reservar o termo velocidade para indicar o vetor
deslocamento por unidade de tempo, e os de celeridade ou rapidez para o
espaço percorrido por unidade de tempo. É claro que para um percurso longo,
c = ∆s
∆t , onde ∆s é o comprimento de arco percorrido no intervalo de tempo ∆t,
será a celeridade média, ou rapidez média, durante ∆t no percurso ∆s.
Figura 6.10: Movimento do ponto P sobre a curva s no plano Oxy.
Suponhamos, por exemplo, que o ponto P descreva o segmento de reta
orientado ∆~r1 = ~r1 −~r0 , durante o intervalo de tempo ∆t1 = t1 − t0 , e que, em
seguida, no intervalo de tempo ∆t2 = t2 − t1 , ele descreverá outro segmento
−−−−→
P1 P2 : ∆~r2 = ~r2 −~r1 , do ponto P2 ele passa a percorrer outro segmento P2 P3 =
∆~r3 = ~r3 −~r2 , fazendo-o durante o intervalo de tempo ∆t3 = t3 − t2 . Ora, no
intervalo de tempo
“ADT-MF” — 2005/11/7 — 8:51 — page 257 — #257
257
6.3. Estudo do movimento de um ponto
∆t = ∆t1 + ∆t2 + ∆t3
= (t1 − t0 ) + (t2 − t1 ) + (t3 − t2 )
= t3 − t0
ele terá efetuado o deslocamento, veja 6 Fig. 6.10,
∆~r = ∆~r1 + ∆~r2 + ∆~r3
= (~r1 − ~r0 ) + (~r2 − ~r1 ) + (~r3 − ~r2 )
= ~r3 − ~r0 .
Os vetores velocidades média serão, em cada trecho:
~v1m =
∆~r1
∆t1
~v2m =
∆~r2
∆t2
~v3m =
∆~r3
∆t3
e o vetor velocidade média no intervalo de tempo ∆t = t3 −t0 , durante o qual o
ponto P efetuou o vetor deslocamento ∆~r =~r3 −~r0 , será:
~vm =
∆~r
∆t
ou
~vm =
∆~r1 + ∆~r2 + ∆~r3
,
∆t
mas
∆~r1 = ~v1m ∆t1 ;
∆~r2 = ~v2m ∆t2 ;
∆~r3 = ~v3m ∆t3 ;
logo:
~vm =
~v1m ∆t1 + ~v2m ∆t2 + ~v3m ∆t3
∆t1 + ∆t2 + ∆t3
ou abreviadamente: 7
3
X
~vm =
(6.3)
~vim ∆ti
i=1
3
X
.
∆t j
j=1
6
u Observe-se que se usou a associatividade e a comutatividade da adição no corpo dos
reais para a composição de intervalos de tempo, e também a associatividade e a comutatividade
da adição no espaço vetorial (dos deslocamentos) para a composição de deslocamentos (usando
a regra do paralelogramo ou, equivalentemente, a regra do fechamento da linha poligonal).
7
u Observe-se que o vetor velocidade média em um intervalo de tempo é igual ao vetor
médio ponderado pelos subintervalos de tempo dos vetores velocidades médias nos subintervalos de tempo considerados.
“ADT-MF” — 2005/11/7 — 8:51 — page 258 — #258
258
Capítulo 6. Cinemática
Vejamos agora o espaço percorrido por unidade de tempo, isto é, a rapidez
média ou celeridade do movimento do ponto P.
Representamos o espaço percorrido por s, o espaço percorrido no intervalo
de tempo ∆t. O espaço percorrido será ∆s1 no intervalo de tempo ∆t1 , ∆s2 em
∆t2 e ∆s3 em ∆t3 .
No caso em pauta e ilustrado na Fig. 6.10, o espaço percorrido no deslocamento ∆~r1 é dado pelo módulo do vetor ∆~r1 , isto é, |∆~r1 | = ∆s1 , do mesmo
modo, os espaços percorridos correspondentes a ∆~r2 e ∆~r3 são os módulos
|∆~r2 | = ∆s2 e |∆~r3 | = ∆s3 respectivamente.
É claro que o espaço total percorrido no intervalo de tempo ∆t é:
∆et = |∆~r1 | + |∆~r2 | + |∆~r3 | = |∆s1 | + |∆s2 | + |∆s3 |
e a celeridade média ou a rapidez média será:
∆et
∆t
|∆~r1 | + |∆~r2 | + |∆~r3 |
=
∆t
cm =
mas ~v1m = ∆t11 ∆~r1 , logo, como ∆t > 0, |~v1m | = ∆t11 |∆~r1 |, assim
|~r1m | = |∆~v1m | ∆t1 ,
analogamente:
|~r2m | = |∆~v2m | ∆t2 ,
|~r3m | = |∆~v3m | ∆t3 .
Portanto
cm =
|∆~v1m | ∆t1 + |∆~v2m | ∆t2 + |∆~v3m | ∆t3
∆t1 + ∆t2 + ∆t3
(6.4a)
ou abreviadamente:
3
X
cm =
|∆~vim | ∆t`
i=1
3
X
.
(6.4b)
∆t j
j=1
Comparando as expressões (6.3) e (6.4a), vemos que se, durante os intervalos de tempo ∆t1 , ∆t2 , ∆t3 . . . ∆tn (n ∈ N), o ponto tem vetores velocidades
médias
~v1m , ~v2m , ~v3m . . . ~vnm ,
“ADT-MF” — 2005/11/7 — 8:51 — page 259 — #259
259
6.3. Estudo do movimento de um ponto
e se os espaços percorridos durante os correspondentes intervalos de tempo
coincidem com os deslocamentos efetuados, então, para calcular o vetor velocidade média durante o intervalo de tempo ∆t = ∆t1 +∆t2 +∆t3 + . . . +∆tn , usa-se
a média ponderada dos vetores velocidades médias durante cada intervalo de
tempo, o peso (para a média) sendo o próprio intervalo de tempo correspondente; enquanto que, para se obter o espaço percorrido por unidade de tempo,
ou rapidez média, calcula-se a média ponderada dos módulos dos vetores velocidades durante os intervalos de tempo correspondentes, os pesos sendo os
correspondentes intervalos de tempo.
Figura 6.11: Movimento do ponto P sobre a curva s no plano Oxy.
Vejamos agora o que acontece com as expressões (6.2), isto é, com os movimentos das projeções sobre os eixos coordenados Ox e Oy. Vamos analisar
apenas o que se passa sobre o eixo Ox, pois sobre o eixo Oy o raciocínio é
análogo, bastando mudar x por y.
Para facilitar, vamos supor que o ponto se mova apenas sobre dois seg−−−−→
−−−−→
mentos de reta P0 P1 = ∆~r1 e P1 P2 = ∆~r2 , veja Fig. 6.11. Os correspondentes
intervalos de tempo sendo ∆t1 = t1 −t0 e ∆t2 = t2 −t1 respectivamente. Teremos:
. Vetor velocidade média no intervalo de tempo ∆t1 e no intervalo ∆t2 :
~v1m =
∆~r1
∆t1
e
~v2m =
∆~r2
.
∆t2
. Vetor velocidade média no intervalo de tempo ∆t = ∆t1 +∆t2 :
~vm =
∆~r ~v1m ∆t1 + ~v2m ∆t2
=
.
∆t
∆t1 + ∆t2
“ADT-MF” — 2005/11/7 — 8:51 — page 260 — #260
260
Capítulo 6. Cinemática
. Deslocamentos nos intervalos de tempo ∆t, ∆t1 e ∆t2 :
∆~r1 = ~r1 − ~r0 = (x1 − x0 )ı̂ + (y1 − y0 ) ̂ = ∆x1 ı̂ + ∆y1 ̂
∆~r2 = ~r2 − ~r1 = (x2 − x1 )ı̂ + (y2 − y1 ) ̂ = ∆x2 ı̂ + ∆y2 ̂
∆~r = ~r − ~r = (x − x )ı̂ + (y − y ) ̂ = ∆xı̂ + ∆y ̂ ,
2
1
2
1
2
1
onde ∆x1 = x1 − x0 , ∆y1 = y1 −y0 , ∆x = x2 − x1 , etc.
Como ∆~r1 +∆~r2 = ∆~r, então:
∆xı̂ + ∆y ̂ = (∆x1 ı̂ + ∆y1 ̂) + (∆2 xı̂ + ∆y2 ̂)
= (∆x1 + ∆x2 ) ı̂ + (∆y1 + ∆y2 ) ̂
portanto
∆x = ∆x1 + ∆x2
∆y = ∆y1 + ∆y2 .
As velocidades médias podem ser escritas na forma:
∆x1
∆y1
∆x2
∆y2
∆x
∆y
~v2m =
~vm =
ı̂ +
̂
ı̂ +
̂
ı̂ +
̂
∆t
∆t
∆t
∆t
∆t
∆t
e as componentes das velocidades médias na direção do eixo Ox são os vetores:
~v1m =
∆x1
∆x2
~v x2 =
ı̂
ı̂
m
∆t
∆t
Daí eles podem ser tratados pelas projeções:
~v x1 =
~v xm =
m
∆x
ı̂
∆t
∆x1
∆x2
∆x
,
v x2 =
,
v xm =
,
m
∆t
∆t
∆t
desse modo, a projeção do vetor velocidade média ~v sobre o eixo dos x será:
v x1 =
m
v xm =
v x1 ∆t1 + v x2 ∆t2
m
m
∆t1 + ∆t2
.
Observe-se que, no caso da Fig. 6.11, a projeção v x1 da velocidade média
m
~v1m tem valor (numérico) positivo, pois o sentido de ~v1m é igual ao do eixo Ox;
enquanto que a projeção v x2 da velocidade média ~v2m tem valor negativo, pois
m
o sentido de ~v2m é contrário ao do eixo dos x, de modo que, para exprimir ∆x =
∆x1 +∆x2 , o deslocamento x1 −x0 = v x1 ∆t1 será subtraído o deslocamento (na
m
direção Ox) |x2 −x1 | = |v x2 ∆t2 |, dando o deslocamento x2 −x0 = v xm (∆t1 +∆t2 ),
m
como é óbvio, x2 − x0 representa o deslocamento sobre o eixo Ox (ou paralelo
ao eixo Ox) da projeção de P sobre Ox, durante o intervalo de tempo (∆t1+∆t2 ).
Ele não representa o espaço percorrido sobre Ox neste intervalo de tempo.
“ADT-MF” — 2005/11/7 — 8:51 — page 261 — #261
261
6.4. Espaço percorrido
Nota Para efeito de notação, também usaremos h~v i =~vm para a velocidade média.
6.4
Espaço percorrido
Para calcularmos a projeção sobre o eixo Ox do espaço percorrido, 8 basta lembrar as equações (6.4), isto é, que temos de tomar os módulos dos vetores deslocamento sobre o eixo dos x, ou suas expressões em função dos módulos das
projeções dos vetores deslocamento sobre o eixo dos x, ou suas expressões em
função dos vetores velocidades médias: 9
|∆x1 | = |x1 − x0 | = |hv x1 i| ∆t1
|∆x2 | = |x2 − x1 | = |hv x2 i| ∆t2 .
Daí, a projeção sobre o eixo Ox do espaço percorrido no intervalo de tempo
∆t = ∆t1 +∆t2 é:
∆s x = |∆x1 | + |∆x2 | = |hv x1 i| ∆t1 + |hv x2 i| ∆t2
e a correspondente celeridade:
cx =
cx =
∆s x
∆t
|hv x1 i| ∆t1 + |hv x2 i| ∆t2
∆t1 + ∆t2
.
Observe-se, pela Fig. 6.11, que |∆x2 | = |hv x2 i|∆t2 é positivo e se soma ao
percurso |∆x1 | = |hv x1 i|∆t1 , dando assim o espaço total percorrido no intervalo
de tempo ∆t1+∆t2 ; e que ∆x2 é negativo, subtraindo-se ao percurso ∆x1 , dando
o deslocamento ∆x = ∆x1 +∆x2 no intervalo de tempo ∆t.
8
u A intenção do autor é mostrar por meio de um exemplo a cinemática vetorial, cuidando
das questões de deslocamento e de espaço percorrido. A principal preocupação tem origem na
confusão conceitual que os estudantes costumam fazer entre os conceitos de deslocamento e
de espaço percorrido. De forma pictórica, deslocamento diz respeito ao que ocorre entre dois
instantes, não importando o ocorrido entre esses instantes; entretanto, para o espaço percorrido,
leva-se em conta a distância retificada percorrida; por exemplo, numa trajetória circular de raio
R, o deslocamento após uma volta completa é igual a zero (unidades de comprimento), enquanto
o caminho percorrido é 2πR, o comprimento de arco de círculo (retificado), seria a “distância
percorrida” marcada no velocímetro de um automóvel.
9
u Está-se levando em conta que se acompanha o movimento da partícula, desse modo
que ∆t > 0.
“ADT-MF” — 2005/11/7 — 8:51 — page 262 — #262
262
Capítulo 6. Cinemática
Considere-se ainda, relativamente à Fig. 6.11, um ponto P0 sobre o eixo
dos x e que percorra o espaço
|∆x| = x2 − x0
no intervalo de tempo ∆t = ∆t1 +∆t2 ,
diretamente sem passar pelo ponto de abscissa x1 ; então P0 se moverá (na média) mais lentamente que a projeção (ortogonal) P x do ponto P sobre o eixo Ox,
que nesse intervalo de tempo percorre |∆x1 |+|∆x2 |. Ambos, P0 e P x , chegarão
juntos ao ponto de abscissa x2 , ambos terão o mesmo vetor velocidade média h~v x i = (∆x/∆t)ı̂; mas P x será mais “célere” ou “rápido” ou “ligeiro”, ou se
moverá com maior “celeridade” ou “rapidez” ou “ligeireza” que o ponto P0 .
Caso mais geral Suponhamos agora um caso mais geral, como o ilustrado na
Fig. 6.12, em que um ponto P descreve uma seqüência de segmentos de retas:
Figura 6.12: Movimento do ponto P em uma seqüência de segmentos de retas.
−−−−→
−−−−→
−−−−→
−−−−→
−−−−→
P0 P1 = ∆~r1 , P1 P2 = ∆~r2 , P2 P3 = ∆~r3 , P3 P4 = ∆~r4 , P4 P5 = ∆~r5 , nos intervalos
de tempo ∆t1 , ∆t2 , ∆t3 , ∆t4 e ∆t5 . Então o espaço percorrido sobre o eixo dos
x será:
s x = |x1 − x0 | + |x2 − x1 | + |x3 − x2 | + |x4 − x3 | + |x5 − x4 |
= |∆x1 | + |∆x2 | + |∆x3 | + |∆x4 | + |∆x5 |
s x = |h~v x1 i| ∆t1 + |h~v x2 i| ∆t2 + |h~v x3 i| ∆t3 + |h~v x4 i| ∆t4 + |h~v x5 i| ∆t5
ou, mais abreviadamente:10
sx =
5
X
|h~v xi i| ∆ti
i=1
10
u
Não confundir o índice i com o versor ı̂.
“ADT-MF” — 2005/11/7 — 8:51 — page 263 — #263
263
6.5. Velocidade instantânea
e a celeridade ou rapidez da projeção do ponto P sobre o eixo Ox será:
5
X
sx
cx =
=
∆t
|h~v xi i| ∆ti
i=1
5
X
.
∆ti
i=1
P
No intervalo de tempo ∆t = 5i=1 ∆ti , a projeção do ponto P sobre o eixo
Ox se deslocou sobre o eixo dos x de:
∆x = x5 − x0 = ∆x1 + ∆x2 + ∆x3 + ∆x4 + ∆x5 ,
em que ∆xi , i ∈ {1, 2, 3, 4, 5}, será positivo ou negativo 11 , conforme o vetor
deslocamento (∆xi )ı̂ tenha ou não o mesmo sentido que o eixo dos x (ou do
versor ı̂) respectivamente, assim os deslocamentos serão ∆x2 < 0, ∆x4 < 0 e
∆x5 < 0, enquanto ∆x1 > 0 e ∆x3 > 0; e o vetor velocidade média da projeção
do ponto P sobre o eixo Ox será:
5
1 X
∆x
ı̂ =
∆xi ı̂ ,
h~v x i =
5
∆t
X
i=1
∆ti
i=1
e, como ∆xi = hvix i ∆ti . Teremos:
5
1 X
h~v x i =
hvix i ∆ti ı̂
5
X
i=1
∆ti
ou
i=1
5
1 X
hv x i =
hvix i ∆ti .
5
X
i=1
∆ti
i=1
Expressões semelhantes pode ser obtidas para o eixo Oy.
6.5
Velocidade instantânea
Voltemos ao caso de uma partícula que descreve uma curva num plano, como
o da Fig. 6.13, conforme observada pelo observador (pontual) O.
11
u Podendo também ser nulo, se o deslocamento ∆~ri correspondente for perpendicular
ao eixo Ox, mas que não está ilustrado na Fig. 6.12.
“ADT-MF” — 2005/11/7 — 8:51 — page 264 — #264
264
Capítulo 6. Cinemática
Figura 6.13: Movimento do ponto P no plano Oxy.
Suponhamos que a partícula esteja ocupando o ponto P0 (da curva suporte
do movimento) no instante t0 (como observado por O) e que no instante (genérico)
t esteja no ponto P, descrevendo o arco de comprimento |∆s| no intervalo de
tempo ∆t = t −t0 , esse comprimento de arco (retificado) sendo medido a partir
de uma origem O0 adotada sobre a curva 12 ; assim, adotando-se também uma
orientação para a curva, a coordenada sobre a curva do ponto P0 é s0 , que nos
dá o comprimento do arco |s0 | de O0 a P0 , e a coordenada (sobre a curva) de P
é s, que forma o comprimento de arco O0 P, de modo que |∆s| = |s− s0 |, onde
∆s = s− s0 é o deslocamento sobre a curva 13 do ponto 00 ao ponto P. O vetor
deslocamento entre os instantes t0 e t será ∆~r = ~r −~r0 , e o vetor velocidade
média será:
∆~r
h~v i = ~vm =
∆t
e a rapidez média será:
∆s
hci = cm =
.
∆t
Neste caso, o módulo do vetor deslocamento |∆~r | não é igual ao comprimento de arco |∆s| correspondente ao deslocamento sobre a curva, mas:
|∆~r | ≤ |∆s| , a igualdade valendo quando o movimento ocorre sobre um segmento de reta.
Para obter uma expressão que nos permita obter o espaço percorrido por
unidade de tempo a partir do módulo do vetor velocidade, podemos proceder
por aproximação, visando a situação limite (quando |∆~r | → |∆s|).
12
O ponto O0 não precisa ser o ponto onde “o movimento se inicia”, tampouco um
“ponto extremo” da curva, pode ser qualquer ponto da curva suporte do movimento observado.
13
u Que não deve ser confundido com o vetor deslocamento ∆~r. Para que não haja confu
são, o termo “deslocamento” se referirá ao vetor ∆~r; enquanto “deslocamento sobre a curva” à
∆S .
u
“ADT-MF” — 2005/11/7 — 8:51 — page 265 — #265
265
6.5. Velocidade instantânea
A Fig. 6.14 é uma reprodução da Fig. 6.13, o movimento do ponto P, no
intervalo de tempo ∆t = t − t0 sobre a curva de s0 até s, é o mesmo que na
Fig. 6.13.
Figura 6.14: Detalhe do movimento do ponto P ilustrado na Fig. 6.13.
Dividimos porém o percurso ∆s = s − s0 em três (3) arcos: P0 P1 , P1 P2 e
P2 P3 ; os correspondentes vetores deslocamento são:
∆~r1 = ~r1 − ~r0 ,
∆~r2 = ~r2 − ~r1 ,
∆~r3 = ~r3 − ~r2 .
A esses vetores deslocamento corresponderão os deslocamentos sobre a curva:
∆s1 = s1 − s0 ,
∆s2 = s2 − s1 ,
∆s3 = s3 − s2 ,
de tal modo que |∆s1 |, |∆s2 | e |∆s3 | são os comprimentos de dos arcos P0 P1 ,
P1 P2 e P2 P3 . Os módulos de cada um dos vetores deslocamento dão os números que medem o comprimento das cordas de cada arco: ∆s1 , ∆s2 e ∆s3
respectivamente. É intuitivo que à medida que |∆~r | tende a zero (i.e., que ∆~r
tende ao vetor nulo ~0), |∆s| também tende a zero, e o comprimento da corda
tende para o comprimento do arco. É claro que
∆~r = ∆~r1 + ∆~r2 + ∆~r3 ,
mas
|∆~r | ≤ |∆~r1 | + |∆~r2 | + |∆~r3 | ≤ |∆s| ,
pois
|∆~r1 | ≤ |∆s1 | ,
|∆~r2 | ≤ |∆s2 | ,
∆s = ∆s1 + ∆s2 + ∆s3
e
|∆~r3 | ≤ |∆s3 | ,
|∆s| ≤ |∆s1 | + |∆s2 | + |∆s3 | .
“ADT-MF” — 2005/11/7 — 8:51 — page 266 — #266
266
Capítulo 6. Cinemática
Se aumentarmos o número de divisões do arco ∆s para n subdivisões, e
somarmos os módulos (as normas) dos vetores deslocamento correspondentes
P
a cada subarco, vamos obter sempre a mesma soma ∆s = ni=1 ∆si , e vamos ter
sempre que
|∆~r | ≤ |∆~r1 | + |∆~r2 | + |∆~r3 | ≤
n
X
|∆~rk | ≤ |∆s| ≤
n
X
|∆si | .
i=1
k=1
Desse modo, podemos aproximar o comprimento |∆s| do arco ∆s pela soma
das normas dos deslocamentos ∆~rk , k ∈ {1, 2, . . . , n} ⊂ N, onde n é o número de
subdivisões consideradas para o arco ∆s, com a precisão que desejarmos (para
aumentar a precisão, aumenta-se o número de subdivisões), e teremos:
lim
n→∞
n
X
|∆~ri | = |∆s| .
i=1
Pelo que já vimos, podemos pôr:
|∆~rk | = |h~vk i| ∆tk ,
em que h~vk i é o vetor velocidade média da partícula na subdivisão k, onde sofre
o deslocamento ∆~rk no intervalo de tempo ∆tk , desse modo, como
lim ∆tk = 0
n→∞
podemos pôr:
lim
∆ti →0
n
X
∀k ∈ N ,
|h~vi i| ∆ti = |∆s| ,
i=1
pois, quando o intervalo de tempo ∆ti tende a zero, |∆~ri | tende para zero também.
6.6
Vetor velocidade instantânea
Vamos examinar mais de perto o significado da velocidade média quando o
correspondente intervalo de tempo tende para zero.
r
O vetor velocidade média durante o intervalo de tempo ∆t é h~v i = ∆~
∆t .
Na Fig. 6.15, vemos vários arcos ∆s0 , ∆s000 e ∆s000 descritos pelo ponto P
em intervalos de tempo, respectivamente, ∆t0 , ∆t00 e ∆t000 , cada vez menores.
“ADT-MF” — 2005/11/7 — 8:51 — page 267 — #267
267
6.6. Vetor velocidade instantânea
Figura 6.15: Detalhe do movimento do ponto P para deslocamentos em intervalos de
tempo cada vez menores.
Os correspondentes vetores deslocamento serão: ∆~r 0 , ∆~r 00 e ∆~r 000 , e os respectivos vetores velocidade média serão:
h~v 0 i =
∆~r 0
,
∆t0
h~v 00 i =
∆~r 00
∆t00
e
h~v 000 i =
∆~r 000
.
∆t000
Observe-se que à medida que vamos tomando intervalos de tempo cada
vez menores, os respectivos deslocamentos vão se tornando menores, de um
modo geral, τ̂0 e a secante P0 P, que pode ser definida pelo versor de mesma
direção e sentido de ∆~r 0 , vai mudando de direção, sua direção se aproximando
da direção da reta tangente à curva no ponto P0 , o versor τ̂0 se aproximando
do versor τ̂ dessa tangente. 14
Desse modo, quando tomamos intervalos de tempo ∆t cada vez menores,
tendentes para zero, os respectivos deslocamentos tendem para zero e o vetor
r
v, que é o vetor que terá a
h~v i = ∆~
∆t tenderá para um vetor limite (bem definido) ~
direção da tangente à curva no ponto P0 , em símbolos:
~r0 − ~r 0
~r(t0 ) − ~r(t 0 )
∆~r
= lim
=
lim
= ~v .
t0 →t0 t0 − t0
t0 →t0
∆t→0 ∆t
t0 − t0
lim
Esse vetor se denomina de vetor velocidade instantânea da partícula no ponto
P0 , ou o vetor velocidade calculado no ponto P0 , ou no instante t0 . Como se
sabe, sendo o movimento da partícula descrito matematicamente por meio de
14
u Observe-se que a reta tangente a uma curva dada em um ponto P0 é a reta secante
limite quando o ponto P0 tende para o ponto P0 . É errado dizer: “a reta tangente é aquela que passa
por um único ponto da curva”; responda: na curva da Fig. 6.15, a reta paralela a Oy que passa por
P0 é tangente à curva em P0 ?
“ADT-MF” — 2005/11/7 — 8:51 — page 268 — #268
268
Capítulo 6. Cinemática
uma função (vetorial, bem definida) do tempo ~r =~r(t), esse limite é a derivada de
~r(t), calculada no ponto P0 , ou no instante t0 , de modo que
d~r ~v0 =
.
dt t=t0
A velocidade instantânea no ponto P0 é a derivada do vetor posição da partícula em função do tempo, calculada no instante t.
Aqui se pode perguntar como se obtém a derivada de uma função vetorial
(a derivada de um vetor, como se diz abreviadamente), e o conceito preciso
r
do limite: lim∆t→0 ∆~
r um vetor, o conceito desse limite
∆t , visto que, sendo ∆~
importa em definições diferentes daquelas que se encontram no Cálculo de
funções reais.
Para contornar o problema, vamos tomar a representação cartesiana do vetor ∆~r :
∆~r = [x(t+∆t) − x(t)] ı̂ + y(t+∆t) − y(t) ̂
~r(t) = x(t)ı̂ + y(t) ̂ ⇒
= ∆xı̂ + ∆y ̂ ,
no sistema de coordenadas ortogonais cartesianas Oxy, como já se viu, então:
∆y
∆~r ∆x
=
ı̂ +
̂
∆t
∆t ( ∆t
)
∆x
∆y
∆~r
= lim
ı̂ +
̂
lim
∆t→0 ∆t
∆t→0 ∆t
∆t
(
)
(
)
∆x
∆y
= lim
ı̂ + lim
̂
∆t→0 ∆t
∆t→0 ∆t
como os versores base ı̂, ̂ são constantes 15 , podemos pôr:
∆~r
=
lim
∆t→0 ∆t
(
)
(
)
∆x
∆y
lim
ı̂ + lim
̂
∆t→0 ∆t
∆t→0 ∆t
logo
" #
" #
d~r
dx
dy
=
ı̂ +
̂ .
dt
dt
dt
15
u Isto é, nesse caso, não dependem do tempo e são consideradas réplicas equipolentes
desses vetores base em cada ponto do plano Oxy, ou seja, ı̂(x,y) ≡ ı̂(0,0) e ̂(x,y) ≡ ̂(0,0) , onde ı̂(0,0) = ı̂
e ̂(0,0) = ̂ são os versores base considerados em O, dessa forma, para os limites para ∆t → 0, ı̂
e ̂ comportam-se como constantes.
“ADT-MF” — 2005/11/7 — 8:51 — page 269 — #269
6.7. Espaço percorrido num movimento qualquer
Isto é, a derivada duma função vetorial ~r =~r (t) é o vetor cujas componentes em
relação a um sistema cartesiano são as derivadas das componentes desse vetor
~r . Mas
d~r ~v(t0 ) =
dt t=t0
" #
" #
dy
dx
~v(t) =
ı̂ +
̂
dt
dt
= v x ı̂ + vy ̂ ,
dx
em que v x = dt
e vy = dy
dt , sendo v x e vy as projeções da velocidade instantânea
da partícula no instante t e na posição P, localizada pelo vetor posição ~r(t), ou
ainda, v x ı̂ e vy ̂ são as componentes dessa velocidade.
6.7
Espaço percorrido num movimento qualquer
6.7.1
Rapidez instantânea
Já vimos que a velocidade ~v(t) de uma partícula num instante t é um vetor
tangente à trajetória no ponto ~r(t) ocupado pela partícula no instante t, isto é:
~v = v τ̂ ,
em que v é o módulo do vetor velocidade e τ̂ é o versor da tangente à trajetória
no ponto considerado e cujo sentido é o do movimento da partícula no ponto 16 .
r
Mas ~v = d~
dt , igualdade que pode ser escrita: (cf. Fig. 6.16)
∆~r
∆t
(
)
|∆~r | 0
= lim
τ̂
∆t→0
∆t
(
)
|∆~r |
= lim
lim τ̂0 ,
∆t→0 ∆t
∆t→0
~v = lim
∆t→0
em que τ̂0 é o versor de 17 ∆~r (com o sentido de ∆~r). Ao intervalo de tempo ∆t
corresponde o espaço percorrido ∆s sobre a trajetória, arco cuja corda é |∆~r |,
16
u Dando o sentido para onde a partícula se encaminha a partir da posição ~r na vizinhança
do instante considerado.
17
u Lembra-se que: ∆~r =~r(t0 +∆t)−~r(t0 ) e ∆s = s(t0 +∆t)− s(t0 ) .
269
“ADT-MF” — 2005/11/7 — 8:51 — page 270 — #270
270
Capítulo 6. Cinemática
Figura 6.16: A velocidade ~v em t = t0 e o versor τ̂ no ponto ~r0 =~r(t0 ).
desse modo
(
)
|∆~r | |∆s| ~v = lim
lim τ̂0
∆t→0 |∆s| ∆t
∆t→0
(
)(
)
|∆~r |
|∆s| = lim
lim
lim τ̂0 ,
∆t→0 |∆s|
∆t→0 ∆t
∆t→0
mas:
|∆~r |
≡1
∆t→0 |∆s|
lim
lim τ̂0 = τ̂ ,
e
∆t→0
sendo τ̂ o versor tangente à curva no instante t0 . Deste modo,
(
)
|∆s|
~v = lim
τ̂ ,
∆t→0 ∆t
mas, ainda,
(
|∆s|
lim
∆t→0 ∆t
)
= c,
sendo c a rapidez (ou celeridade) instantânea ou espaço percorrido (instantâneo) por unidade de tempo, donde:
~v = c τ̂ .
(6.5)
Tomando o módulo de ambos os membros de (6.5), obtemos:
|~v | = |c τ̂| = |c| | τ̂|
⇒
|~v | = c ,
pois | τ̂| ≡ 1 e, por definição, c ∈ R+ ; logo, o módulo do vetor velocidade instantânea é igual à rapidez instantânea ou ao espaço percorrido por unidade de
tempo calculado no instante considerado.
“ADT-MF” — 2005/11/7 — 8:51 — page 271 — #271
6.7. Espaço percorrido num movimento qualquer
6.7.2
Representação do vetor velocidade instantânea
O vetor velocidade (instantânea) de um ponto P, como vimos, é um vetor tangente à sua trajetória (em relação ao observador que analisa o movimento da partícula), seu módulo sendo o espaço percorrido por unidade de tempo (rapidez
instantânea), o seu sentido sendo o do movimento sobre a curva suporte do movimento da partícula na vizinhança do instante considerado.
Figura 6.17: Representação geométrica do vetor velocidade instantânea ~v.
A representação gráfica desse vetor se fará por um segmento de reta orientado, com origem no ponto P, tangente à curva, de comprimento numericamente igual à rapidez instantânea (ao espaço percorrido por unidade de tempo)
calculado no ponto P (no instante considerado, conforme ilustra a Fig. 6.17). É
claro que comprimento do segmento de reta que representará ~v dependerá da
escala escolhida para representar a unidade de celeridade.
A unidade de celeridade é a unidade de comprimento dividida pela unidade
de tempo.
A unidade de comprimento podendo ser o quilômetro (km), o metro (m),
o centímetro (cm), etc., e a unidade de tempo a hora (h), o minuto (min), o
segundo (s), etc., deste modo, a unidade de celeridade é o km/h, m/s, cm/s,
que se lê: quilômetro por hora, metro por segundo, centímetro por segundo.
A definição dessas unidades, de tempo e de comprimento, serão vistas mais
tarde, por ora nos basta a noção que já temos delas. Ressalta-se que as correspondentes unidades SI são: m (metro) e s (segundo), e m/s (metro por segundo).
6.7.3
Espaço percorrido
Esse problema já foi parcialmente resolvido anteriormente, vamos procurar
dar agora a solução mais geral possível. Para isso, retornemos ao movimento
sobre a reta, veja Fig. 6.18. O ponto se desloca de P1 para P2 no intervalo de
271
“ADT-MF” — 2005/11/7 — 8:51 — page 272 — #272
272
Capítulo 6. Cinemática
tempo ∆t = t2 −t1 . As equações paramétricas da trajetória sendo:
x = x(t)
⇔ ~r(t) = x(t)ı̂ + y(t) ̂ ,
y = y(t)
sendo ~r(t) a equação vetorial da trajetória.
Figura 6.18: Espaço percorrido em movimentos retilíneos.
No presente caso, é claro que o percurso sendo retilíneo, o espaço percorrido de P1 a P2 é o comprimento do segmento de reta
P1 P2 = |∆~r | = |~r2 − ~r1 | .
As projeções do ponto P sobre os eixos dos x e dos y percorrerão os espaços:
|∆x| = |x2 − x1 |
e
|∆y| = |y2 − y1 | .
Correspondendo a celeridade média:
s
r
2 2
x2 − x1 2 y2 − y1 2
∆x
∆y
cm =
+
= + .
∆t
∆t
∆t
∆t
Pode-se subdividir o percurso em trechos muito curtos nos quais a velocidade média, no intervalo de tempo ∆ti = τi+1 −τi , entre os pontos Ai e Ai+1 é
h~vi i = hv xi iı̂ + hvyi i ̂ = (hv xi i hvyi i),
i ∈ {1, 2, 3 . . . n},
sendo P1 ≡ A1 e P2 ≡ An+1 ; e t1 ≡ τ1 e t2 ≡ τn+1 . Teremos, como já se viu, as
seguintes relações:
n
X
hv xi i ∆ti
x
−
x
=
2
1
n
X
i=1
(6.6)
|h~vi i| ∆ti e
s2 − s1 =
n
X
i=1
hvyi i ∆ti .
y − y1 =
2
i=1
“ADT-MF” — 2005/11/7 — 8:51 — page 273 — #273
273
6.7. Espaço percorrido num movimento qualquer
Podemos, ainda, fazer com que o número de subdivisões tenda para infinito,
n → ∞, e, neste caso, as expressões limites de (6.6) se transformam em:
Z
s2 − s1 =
t2
t1
|~vi | dt
e
Z t2
vix dt
x2 − x1 =
t1
Z t2
viy dt .
y2 − y1 =
(6.7)
t1
No caso de movimento sobre um segmento de reta, é claro que, sendo ∆x =
x(t2 )− x(t1 ) e ∆y = y(t2 )−y(t1 ) as projeções de ∆s sobre os eixos dos x e dos y
respectivamente, temos que:
|∆s|2 = |∆x|2 + |∆y|2
(6.8)
ou
|s2 − s1 |2 = |x2 − x1 |2 + |y2 − y1 |2 ,
pois os eixos são ortogonais e o ponto descreve um segmento de reta. Portanto,
q
|∆s| =
ou
(∆x)2 + (∆y)2
q
|s2 − s1 | =
(x2 − x1 )2 + (y2 − y1 )2 .
Movimento não-retilíneo Se o ponto P, ao atingir a posição P2 , passa a descrever um outro segmento de reta, veja Fig. 6.19, então teremos de subdividir
o trajetória nos dois segmentos de reta, tomar seus comprimentos e somar
Figura 6.19: Espaço percorrido em movimento sobre linha poligonal aberta.
“ADT-MF” — 2005/11/7 — 8:51 — page 274 — #274
274
Capítulo 6. Cinemática
s3 − s1 = |∆~r1 | + |∆~r2 |
e
x3 − x1 = |∆x1 | + |∆x2 |
y3 − y1 = |∆y1 | + |∆y2 | ,
mas agora, devemos substituir cada percurso ∆~r1 e ∆~r2 por expressões análogas
às (6.8), isto é:
q
q
e
|∆~r2 | = (∆x2 )2 + (∆y2 )2 ,
|∆~r1 | = (∆x1 )2 + (∆y1 )2
pois o teorema de Pitágoras se aplica apenas a cada percurso retilíneo, ∆~r1 e
∆~r2 respectivamente. Portanto:
|s3 − s1 | =
q
q
2
2
= (∆x1 ) + (∆y1 ) + (∆x2 )2 + (∆y2 )2
q
q
2
2
= (hv1x i ∆t1 ) + (hv1y i ∆t1 ) + (hv x1 i ∆t2 )2 + (hvy2 i ∆t2 )2 .
ou
Observe-se que: (|hv x1 i| ∆t1 )2 = (hv x1 i ∆t1 )2 .
É claro que se tivermos um número grande de segmentos retilíneos descritos pelo ponto P, como no caso da Fig. 6.12, podemos pôr:
5 X
1
|s2 − s1 | =
|∆xi |2 + |∆yi |2 2
i=1
5 q
X
=
(hvix i ∆ti )2 + (hviy i ∆ti )2 .
(6.9)
i=1
Movimento curvilíneo Podemos agora tratar o caso geral em que a partícula
descreve uma curva qualquer, veja Fig. 6.20.
Subdividimos a curva P1 P2 em n arcos muito pequenos ∆si , tais que
|∆si | ≈ |∆~ri | ≈ ξi ,
τ0 = t1 , τn = t2 ,
e em que ∆~ri é o vetor deslocamento da partícula correspondente a esse arco e
ξi é o espaço total percorrido sobre a curva, no intervalo de tempo ∆ti = τi−τi−1 .
Podemos pôr:
|∆~ri | = |h~vi i| ∆ti ,
em que h~vi i é a velocidade média no intervalo de tempo ∆ti , desse modo, denotando por ξ(t1 ;t2 ) o espaço total percorrido entre os instantes t1 e t2 :
n
X
i=1
|∆~ri | ≤ ξ(t1 ;t2 )
ou
n
X
|h~vi i| ∆ti ≤ ξ(t1 ;t2 ) .
(6.10)
i=1
“ADT-MF” — 2005/11/7 — 8:51 — page 275 — #275
275
6.7. Espaço percorrido num movimento qualquer
Figura 6.20: Análise cinemática do movimento geral do ponto P, de P1 até P2 .
Se aumentarmos (indefinidamente) o número de subdivisões, fazendo n → ∞,
as somas em (6.10) tenderão para o comprimento total retificado ξ(t1 ; t2 ) percorrido no arco P1 P2 , de modo que:
lim
n→∞
n
X
|∆~ri | = ξ(t1 ; t2 )
ou
i=1
lim
n→∞
n
X
|h~vi i| ∆ti = ξ(t1 ; t2 ) .
i=1
Esses limites são dados pelas integrais definidas:
Z t2
n
X
ξ(t1 ; t2 ) = lim
|∆~ri | =
|d~r |
ou
n→∞
t1
i=1
Z t2
n
X
ξ
= lim
|h~vi i| ∆ti =
|~v(t)| dt .
(t1 ; t2 ) n→∞
t1
(6.11)
i=1
Podemos considerar a curva dividida em elementos infinitesimais nos quais
os comprimentos de arco ds e as correspondentes cordas |d~r | que submetem
esse arcos se igualam 18 , isto é, ds = |d~r |; analogamente, teríamos intervalos de
tempo infinitesimais e tais que
ds = |d~r | = |~v(t)| dt ,
onde d~r = ~v(t) dt é o deslocamento ocorrido entre os instantes t e t +dt; sendo
~v(t) a velocidade no instante t, e sendo dt um intervalo de tempo infinitesimal.
18
u A menos de infinitésimos de ordem superior, infinitésimos esses que no limite contri
buem com valor numérico nulo.
“ADT-MF” — 2005/11/7 — 8:51 — page 276 — #276
276
Capítulo 6. Cinemática
O cálculo das integrais em (6.11) não devem assustar o estudante, observe-se que
|~v(t)| = |v x (t)ı̂ + vy (t) ̂|
q
= (v x (t))2 + (vy (t))2
= λ(t) , uma função real da variável real t.
Ou seja, dado ~r(t), determina-se o vetor velocidade ~v(t), uma função vetorial
do tempo, e desta
R t a função do tempo λ(t), como indicado acima, que é o integrando de t 2 |~v(t)| dt, o que sublinha que se precisa calcular uma integral
1
definida de uma função real (R) de uma (1) variável real (R).
Para o “espaço percorrido” pela projeção sobre cada eixo coordenado, dos
x e dos y, temos expressões análogas:
Z
Eixo Ox : ξ x(t1 ,t2 ) =
Eixo Oy : ξy(t1 ,t2 ) =
Z
Z
t2
enquanto ∆x =
t2
|dx| =
t
Z 1t2
t
Z 1t2
|dy| =
t1
t1
|v x (t)| dt
(6.12a)
|vy (t)| dt ,
(6.12b)
x2
dx =
t1
Z
t2
x1
dx = x2 − x1 , etc.
Nota 19 O procedimento do texto original pressupunha movimentos progressivos, isto é, movimentos observados em que a partícula não volta a ocupar um
mesmo ponto de uma mesma curva-suporte; nesses casos os comprimentos de
arco |s2−s1 | coincidem como os espaços percorridos entre os instantes t1 e t2 , o
que não ocorre quando o movimento é “não-progressivo” (e a partícula oscila
sobre um arco de curva). Para se medir os comprimentos de arco entre dois
pontos, pode-se imaginar um movimento progressivo qualquer (uma parametrização progressiva qualquer para curva, afinal esse comprimento de arco não
depende de como a curva é traçada) e anotar a coordenada s sobre a curvasuporte, enquanto que o movimento ~r(t) observado para a partícula fornece o
espaço total (retificado) percorrido sobre a curva-suporte: ξ(t1 ; t2 ) tal que
Z
ξ(t1 ; t2 ) =
19
u
t2
|~v(t)| dt .
t1
A necessidade da mudança realizada nos foi apontada pelo próprio Prof. Armando.
“ADT-MF” — 2005/11/7 — 8:51 — page 277 — #277
277
6.7. Espaço percorrido num movimento qualquer
Usaremos a notação ∆s = s2 − s1 para denotar o deslocamento sobre a curva
orientada, e |∆s| quando quisermos nos referir a esse deslocamento a despeito
da orientação adotada para a curva-suporte, além de ξ(t1 ; t2 ) para o espaço total
percorrido.
Problemas
Problema 6.1. Um ponto se desloca, em relação a dado observador, com velocidade constante
~v = (30 cm/s2 )ı̂ + (20 cm/s2 ) ̂ .
No instante t1 = 2s passa pelo ponto P1 de coordenadas (−3m, 2m). Pede-se:
1. as coordenadas do ponto no instante t2 = 12s, e no instante t3 = 22s, e
em t4 = 42s;
2. os vetores deslocamento do ponto nos intervalos de tempo: t2 −t1 , t3 −t1
e t4 −t1 ;
3. fazer o gráfico (em escala) da trajetória do ponto, representando no
gráfico os vetores posição para os instantes dados;
4. calcular o vetor deslocamento e conferir o resultado no gráfico;
5. representar o vetor velocidade sobre a curva suporte da trajetória.
Solução20 Como a velocidade da partícula é constante, (estaremos usando
comprimento em m, tempo em s, e velocidade em m/s)
~r(t) = ~r1 + ~v (t − t1 )
= [−3 + 0,3×(t − 2)] ı̂ + [+2 + 0,2×(t − 2)] ̂
daí
~r1
~r2
~r3
~r
4
= ~r (2 s) = (−3 m)ı̂ + (2 m) ̂
= ~r (12 s) = (0 m)ı̂ + (4 m) ̂
= ~r (22 s) = (3 m)ı̂ + (6 m) ̂
= ~r (42 s) = (9 m)ı̂ + (10 m) ̂
⇒
⇒
⇒
⇒
P1
P2
P3
P4
≡ (−3 m ,
≡ ( 0m,
≡ ( 3m,
≡ ( 9m,
2 m)
4 m)
6 m)
10 m)
20
u Recomenda-se que o estudante resolva os problemas antes de estudar as soluções
apresentadas.
“ADT-MF” — 2005/11/7 — 8:51 — page 278 — #278
278
Capítulo 6. Cinemática
do que se tira facilmente os vetores deslocamento:
∆~r1 = ~r2 − ~r1 = ( 3 m)ı̂ + (2 m) ̂
∆~r2 = ~r3 − ~r1 = ( 6 m)ı̂ + (4 m) ̂
∆~r3 = ~r4 − ~r1 = (12 m)ı̂ + (8 m) ̂
o que nos permite calcular diretamente os módulos dos vetores deslocamento,
ou alternativamente, como:
q
|~v| =
v x 2 + vy 2 =
p
302 + 202 cm/s = 10
√
13 cm/s = 36 cm/s
= 0,36 m/s,
e, como temos: |∆~ri | = |~v |∆ti = (0,36 m/s)∆ti , podemos pôr:
√
|∆~r1 | = (0,36 m/s) (10 s) = 3,6 m =
32 + 22 m
√
|∆~r2 | = (0,36 m/s)
= 7,2 m =
62 + 42 m
√
|∆~r | = (0,36 m/s) (40 s) = 14,4 m = 122 + 82 m .
3
O resultado do 5o item está na Fig. 6.21.
Problema 6.2. Um ponto descreve uma trajetória cujas equações paramétricas são:
1
x = 2 t2 + 2
y = t + 4 ,
em que x e y são expressos em metros e t em segundos. Pede-se:
1. as coordenadas do ponto nos instantes t = 0 s e t = 3 s;
2. os raios vetores do ponto para t = 0 s e t = 3 s;
3. o vetor deslocamento no intervalo de tempo de t = 0 s a t = 3 s;
4. o vetor velocidade em t = 0 s, t = 2 s e t = 3 s;
5. fazer a representação gráfica da trajetória entre t = 0 s e t = 4 s, bem
como a das grandezas dos quesitos anteriores.
“ADT-MF” — 2005/11/7 — 8:51 — page 279 — #279
6.7. Espaço percorrido num movimento qualquer
Figura 6.21: Solução do 5o item do Probl. 6.1.
279
“ADT-MF” — 2005/11/7 — 8:51 — page 280 — #280
280
Capítulo 6. Cinemática
Solução Temos:
~r(t) = x(t)ı̂ + y(t) ̂ = ( 12 t2 + 2)ı̂ + (t + 4) ̂ e ~v(t) = v x (t)ı̂ + vy (t) ̂ ,
daí 21
d 1 2
t
+
2
= (1 m/s2 ) t
v
(t)
=
x
2
dt
d
vy (t) = (t + 4) = (1 m/s)
dt
raios vetores
~r(0 s) = ( 2,0 m)ı̂ + (4,0 m) ̂
~r(1 s) = ( 2,5 m)ı̂ + (5,0 m) ̂
~r(2 s) = ( 4,0 m)ı̂ + (6,0 m) ̂
~r(3 s) = ( 6,5 m)ı̂ + (7,0 m) ̂
~r(4 s) = (10,0 m)ı̂ + (8,0 m) ̂
⇒
~v(t) = (t m/s2 )ı̂ + (1 m/s) ̂
coordenadas
P0 ≡ ( 2,0 m ,
P1 ≡ ( 2,5 m ,
P2 ≡ ( 4,0 m ,
P3 ≡ ( 6,5 m ,
P0 ≡ (10,0 m ,
4,0 m)
5,0 m)
6,0 m)
4,0 m)
8,0 m)
vetor deslocamento entre t = 0 s e t = 3 s:
∆~r = ~r(3 s) − ~r(0 s) = (4,5 m)ı̂ + (3,0 m) ̂
vetores velocidade:
t
0s
1s
2s
3s
4s
~v
(0 m/s)ı̂ + (1 m/s) ̂
(1 m/s)ı̂ + (1 m/s) ̂
(2 m/s)ı̂ + (1 m/s) ̂
(3 m/s)ı̂ + (1 m/s) ̂
(4 m/s)ı̂ + (1 m/s) ̂
vx
0 m/s
1 m/s
2 m/s
3 m/s
4 m/s
vy
1 m/s
1 m/s
1 m/s
1 m/s
1 m/s
A representação gráfica está na Fig. 6.22.
Problema 6.3. Uma partícula descreve uma trajetória sobre uma curva cuja
equação cartesiana é
(x − 2 m)2 + (y − 3 m)2 = 9 m2 .
Supondo que no instante t = 0 s ela esteja na posição P0 de coordenadas
x = 5 m e y = 3 m, sendo seu vetor velocidade de módulo constante e igual
a 1,5 m/s. Pede-se:
21
u
Nota-se que x(t) =
1
2
m s−2 t2 + 4 m e y(t) = 1 m s−1 t+ 4 m .
“ADT-MF” — 2005/11/7 — 8:51 — page 281 — #281
6.7. Espaço percorrido num movimento qualquer
Figura 6.22: Solução do 5o item do Probl. 6.2, a curva descrita é uma parábola de
equação cartesiana: x = 12 (y − 4)2 + 2.
1. traçar a curva-suporte da trajetória da partícula;
2. traçar o vetor velocidade instantânea nos pontos: P0 ≡ (5 m, 3 m), P1 ≡
(2 m, 6 m), P2 ≡ (−1 m, 3 m3) e P3 ≡ (2 m, 0 m); traçar também os vetores
deslocamento do ponto P0 aos pontos P1 e P2 ;
3. dizer qual o espaço percorrido quando ela se desloca de P0 a P2 ; qual a
razão entre esse espaço percorrido e o módulo do correspondente vetor
deslocamento;
4. dizer qual o espaço percorrido até a partícula retornar à posição P0 e
qual o vetor deslocamento nesse caso.
Respostas
1. A equação da curva-suporte da trajetória indica que ela é um círculo de
circunferência de raio R = 3 m e cujo centro está no ponto de coordenadas
(2 m , 3 m). (cf. Fig. 6.23)
2. O vetor velocidade instantânea é, em cada ponto, tangente à trajetória e
seu módulo é igual a 1,5 m/s, o sentido é o do movimento de P0 para P1 .
281
“ADT-MF” — 2005/11/7 — 8:51 — page 282 — #282
282
Capítulo 6. Cinemática
Figura 6.23: Solução do 1o item do Probl. 6.3, aspecto vetorial do movimento circular
uniforme.
3. O espaço percorrido quando o ponto se desloca de P0 para P2 é o arco
de círculo P0 P1 P2 , sendo P2 diametralmente oposto a P0 , portanto igual
a πR, em que R é o raio do círculo descrito. A razão entre esse arco e o
módulo do vetor deslocamento, que é |∆~r | = 2R, será π/2.
4. Até retornar a P0 , a partícula descreve toda a circunferência de raio R,
portanto percorre o espaço 2πR. O correspondente vetor deslocamento é
o vetor nulo.
Problema 6.4. Um móvel, no instante t0 = 2 s, parte do ponto P0 ≡ (2 , 3), com
vetor velocidade constante ~v0 = 30ı̂+ 20 ̂, até atingir o ponto P1 no instante
t1 = 32 s; muda de direção, passando a ter um vetor velocidade (constante)
~v1 = −20ı̂−40 ̂, até atingir o ponto P2 no instante t2 = 52 s. As coordenadas
estão dadas em m e as velocidades em cm/s. Pede-se:
1. os vetores posição de P0 , P1 e P2 ;
2. as coordenadas de P0 , P1 e P2 ;
3. os vetores deslocamento do móvel entre P0 e P1 , P1 e P2 , e, P0 e P2 ;
4. os espaços percorridos pelo móvel entre P0 e P1 , P1 e P2 , e, P0 e P2 ;
5. o vetor deslocamento e o espaço percorrido no intervalo de tempo definido pelos instantes t1 e t2 ;
“ADT-MF” — 2005/11/7 — 8:51 — page 283 — #283
283
6.7. Espaço percorrido num movimento qualquer
6. Represente o vetor velocidade do móvel em cada trecho em que a velocidade é constante.
Respostas Equação vetorial do vetor posição:
~r = ~r0 + ~v0 (t − t0 )
para
t ∈ [t0 , t1 ]
(6.13a)
~r = ~r1 + ~v1 (t − t1 )
para
t ∈ [t1 , t2 ]
(6.13b)
Equações cartesianas correspondentes
x = x0 + v0x (t − t0 ) ;
y = y0 + v0y (t − t0 )
para
t ∈ [t0 , t1 ]
(6.14a)
x = x1 + v1x (t − t1 ) ;
y = y1 + v1y (t − t2 )
para
t ∈ [t1 , t2 ]
(6.14b)
P1 ≡ (11 cm, 9 cm)
(6.15a)
P2 ≡ (7 cm, 1 cm)
(6.15b)
Donde:
x = 2 + 0,3(32 − 2) = 11 cm
y = 3 + 0,2(32 − 2) = 9 cm
x = 11 + (−0,2)(52 − 32) = 7 cm
y = 9 + (−0,4)(52 − 32) = 1 cm
q
√
√
302 + 202 = 10 13 = 36 cm/s = 0,36 m/s
q
√
√
|~v2 | = v2x + v2y = 202 + 402 = 10 20 = 46 cm/s = 0,46 m/s
|~v1 | =
v2x + v2y =
|∆~r1 | = |~v1 | (t1 − t0 ) = 0,36 m/s 30 s = 10,8 m
|∆~r2 | = |~v2 | (t2 − t1 ) = 0,46 m/s 20 s = 9,2 m.
Deslocamento:
∆~r = ∆~r1 + ∆~r2 = ∆x1 ı̂ + ∆y1 ̂ + ∆x2 ı̂ + ∆y2 ̂
= (∆x1 + ∆x2 )ı̂ + (∆y1 + ∆y2 ) ̂
∆x1 = x1 − x0 ; ∆y1 = y1 − y0 ; ∆x2 = x2 − x1 ; ∆y2 = y2 − y1
= 11 − 2 ;
=9−3 ;
= 7 − 11 ;
=1−9
=9
;
=6
;
= −4
;
= −8
∆~r = (9 − 4)ı̂ + (6 − 8) ̂ = 5ı̂ + (−2) ̂
p
√
|∆~r| = 52 + (−2)2 = 29 ≈ 5,4 m .
“ADT-MF” — 2005/11/7 — 8:51 — page 284 — #284
284
Capítulo 6. Cinemática
Figura 6.24: Sucessão de movimentos retilíneos e uniformes não-colineares, 6o item
do Probl. 6.4.
Espaço percorrido:
∆s = |∆~r1 | + |∆~r2 | = 10,8 m + 9,2 m = 20 m .
Veja representação gráfica na Fig. 6.24.
Definição I Denomina-se celeridade média, ou rapidez média a razão entre
o espaço percorrido ∆s e o intervalo de tempo ∆t empregado para percorrê-lo: cm = ∆s/∆t. É o espaço percorrido por unidade de tempo.
Definição II Denomina-se celeridade instantânea ou rapidez instantânea ao
limite
∆s ds
c = lim
=
.
∆t→0 ∆t
dt
É o espaço percorrido por unidade de tempo calculado num dado instante, ou durante um intervalo de tempo infinitesimal.
“ADT-MF” — 2005/11/7 — 8:51 — page 285 — #285
6.7. Espaço percorrido num movimento qualquer
Problema 6.5. Um ponto material parte de uma posição P0 ≡ (2 , 3) com vetor
velocidade constante ~v0 = 0,3ı̂+0,4 ̂ no instante t0 = 2 s. As coordenadas são
dadas em m e as velocidades em m/s. No instante t1 = 12 s, muda de direção,
passando a ter um vetor velocidade constante ~v1 = 0,2ı̂− 0,4 ̂ até o instante
t2 = 22 s, quando muda novamente de velocidade, adquirindo a velocidade
~v2 = −0,3ı̂−0,2 ̂ até o instante te = 32 s, quando estaciona em Pe . Pede-se:
1. fazer o diagrama do movimento;
2. calcular os vetores deslocamento entre os instantes dados e o deslocamento entre P0 e Pe ;
3. calcular o espaço percorridos entre os instantes dados e o espaço total
de P0 a Pe ;
4. calcular as celeridades médias e as instantâneas entre os instantes dados, e a celeridade média de P0 e Pe ;
5. calcular o vetor velocidade média entre P0 e Pe ;
6. comparar os resultados.
Respostas Coordenadas dos pontos P0 , P1 , P2 e Pe :
P0 :
P0 ≡ (2 m, 3 m)
P1 : x1 = x0 + v0x (t1 − t0 ) e y1 = y0 + v0y (t1 − t0 ), daí
x1 = 2 + 0,3 (12 − 2) = 2 + 3 = 5
y1 = 3 + 0,4 (12 − 2) = 3 + 4 = 7 , portanto P1 ≡ (5 m, 7 m)
P2 : x2 = x1 + v1x (t2 − t1 ) e y2 = y1 + v1y (t2 − t1 ), daí
x2 = 5 + 0,2 (22 − 12) = 5 + 2 = 7
y2 = 7 + (−0,4) (22 − 12) = 7 − 3 = 4 , portanto P2 ≡ (7 m, 3 m)
Pe : x2 = x2 + v2x (te − t2 ) e ye = y2 + v2y (te − t2 ), daí
xe = 7 + (−0,3) (32 − 22) = 7 − 3 = 4
ye = 3 + (−0,2) (32 − 22) = 3 − 2 = 1 , portanto Pe ≡ (4 m, 1 m)
285
“ADT-MF” — 2005/11/7 — 8:51 — page 286 — #286
286
Capítulo 6. Cinemática
Deslocamentos:
∆~r1 = (x1 − x0 )ı̂ + (y1 − y0 ) ̂
= 3ı̂ + 4 ̂
|∆~r1 | =
p
√
32 + 42 = 25 = 5
|∆~r2 | =
p
√
22 + 42 = 20 = 4,48
∆~r2 = (x2 − x1 )ı̂ + (y2 − y1 ) ̂
= 2ı̂ + 4 ̂
∆~re = (xe − x2 )ı̂ + (ye − y2 ) ̂
= 2ı̂ − 2 ̂
|∆~re | =
p
22 + 22 =
√
8 = 2,83.
O espaço percorrido entre os instantes dados é igual ao módulo dos respectivos deslocamentos, logo o espaço total percorrido no intervalo de tempo
∆t = te − t0 = 32 − 2 = 30 s:
∆s = |∆~r1 | + |∆~r2 | + |∆~r3 | = 12,65 m
Portanto a celeridade média será:
∆s/∆t = 12,65 m/30 s = 0,422 m/s
A velocidade média será:
~vm =
−2 m
∆~r 2 m
=
ı̂ +
̂ = (0,067 m/s) ı̂ − (0,067 m/s) ̂
∆t 30 s
30 s
e
|~vm | =
|∆~r| 2,83 m
=
= 0,094 m/s .
∆t
30 s
A velocidade média do ponto P entre P0 e Pe é igual a 0,094 m/s e sua velocidade média é 0,422 m/s. Se um ponto P0 sai de P0 no mesmo instante que
−−−→
P, mas percorrendo o deslocamento P0 Pe com velocidade média de módulo
igual a 0,094 m/s, ele chegará à posição Pe no mesmo instante que P, o qual
deve percorrer o caminho de P0 a P1 , de P1 a P2 , e de P2 a Pe , muito mais
longo, por isso a celeridade de P é muito maior que a celeridade de P0 , considerada como espaço percorrido por unidade de tempo ao logo do segmento
P0 Pe . Observe-se que se Pe coincide P0 , o deslocamento de P0 , e portanto também de P, é o vetor nulo, o vetor velocidade média de P0 e de P entre P0 e Pe
é o vetor nulo, entretanto a celeridade de P não é nula.
Veja representação gráfica na Fig. 6.25.
“ADT-MF” — 2005/11/7 — 8:51 — page 287 — #287
6.7. Espaço percorrido num movimento qualquer
Figura 6.25: Solução do 1o item do Probl. 6.5.
Problema 6.6. Um ponto descreve uma trajetória cujas equações paramétricas são:
1
x = 2 t2 + 2
y = t + 4 ,
em que x e y são expressos em metros e t em segundos. Pede-se:
1. as coordenadas do ponto no instante t = 0 s e t = 4 s;
2. os raios vetores do ponto para t = 0 s e t = 4 s;
3. o vetor deslocamento no intervalo de tempo entre os instantes t = 0 s e
t = 4 s;
4. o vetor velocidade (instantânea) para t = 0 s, t = 2 s e t = 3 s;
5. fazer a representação gráfica da trajetória entre t = 0 s e t = 4 s, bem
como a das grandezas dos quesitos anteriores;
6. calcular o espaço percorrido entre os instantes t = 0 s e t = 3 s.
Respostas A curva descrita é uma parábola cuja equação cartesiana é: y =
1
2
2 (y−4) +2.
287
“ADT-MF” — 2005/11/7 — 8:51 — page 288 — #288
288
Capítulo 6. Cinemática
t
0
1
2
3
4
x
2,0
2,5
4,0
6,5
10,0
y
4,0
5,0
6,0
7,0
8,0
Figura 6.26: Representação gráfica correspondente às equações paramétricas: x = 12 t2
e y = t+4, relativas ao Probl. 6.6.
Vetor deslocamento entre ~r(0 s) e ~r(4 s): (veja Fig. 6.26)
∆~r4 = (x4 − x0 )ı̂ + (y4 − y0 ) ̂
= (10 − 2)ı̂ + (8 − 4) ̂
= (8 m)ı̂ + (4 m) ̂
p
√
|∆~r4 | = 82 + 42 = 80 = 8,94 m .
Espaço percorrido entre t0 = 0 s e t4 = 4 s, de P0 e P4 :
ds2 = dx2 + dy2 = v x dt 2 + vy dt 2
= v2x + v2y (dt)2
q
ds = v2x + vy dt
Z tq
v2x + vy dt ; v x = t , vy = 1
s − s0 =
0
Z tp
=
1 + t2 dt .
0
R √
A integral anterior é da forma
c2 + z2 dz, em que c é uma constante. Essa
integral se estuda nas aulas de cálculo, ou também se pode achar em tabelas,
“ADT-MF” — 2005/11/7 — 8:51 — page 289 — #289
289
6.7. Espaço percorrido num movimento qualquer
teremos:
Z p
p
1 p 2
2
2
2
2
2
2
c + z dz =
z c + z + c ln(z + c + z )
2
(6.16)
Neste caso c = 1 e z = t, logo dz = dt, donde:
Z p
p
1 p
1 + t2 dt =
t 1 + t2 + ln(t + t2 + 1 ) ,
2
note-se que ln é o logaritmo neperiano, temos portanto: 22
" p
Z 4p
#4
p
1
s=
1 + t2 dt =
t 1 + t2 + ln(t + t2 + 1 )
2
0
0
1 p
p
p
p
1
=
4 1+42 + ln(4+ 42 +1 ) −
0 1+02 + ln(0+ 02 +1 )
2
2
√ o 1
1n √
=
4 17 + ln(4 + 17 ) − {0 + ln(1)}
2
2
1
= {4 × 4,12 + ln(8,12)} − 0
2
1
18,574
= (16,48 + 2,094) =
2
2
≈ 9,28 m,
o que confere com o gráfico da Fig. 6.26; compare com o módulo do deslocamento que é 8,94 m.
Problema 6.7. Um ponto descreve uma trajetória de equações paramétricas:
x = (2 m/s)t
y = (4 m/s)t − ( 1 m/s2 )t2 .
2
Pede-se:
1. fazer o gráfico da curva-suporte da trajetória entre t = 0 s e t = 8 s;
2. determinar o vetor deslocamento entre t = 0 s e t = 8 s;
3. calcular o espaço percorrido entre t = 0 s e t = 8 s;
4. medir o espaço percorrido no gráfico e comparar com os resultados
calculados.
22
u Note-se também que se pretende calcular o espaço percorrido sobre a curva suporte do
movimento durante dois instantes, assim se pode considerar s0 = 0 sem perda de generalidade.
“ADT-MF” — 2005/11/7 — 8:51 — page 290 — #290
290
Capítulo 6. Cinemática
Respostas Temos:
x = 2t ; y = 4t − 21 t2
v x = 2 ; vy = 4 − t
p
4 + (4 − t)2 dt
Z 8p
s=
4 + (4 − t)2 dt
ds =
0
para calcular essa integral podemos fazer z = 4 − t, daí
dz = −dt, associados aos limites de integração: t = 0 7→
z = 4 e t = 8 7→ z = −4, donde, levando em conta (6.16)
para c2 = 4:
Z −4 p
s=−
4 + z2 dz
Dados para os pontos
da Fig. 6.27.
t
0
1
2
3
4
5
6
7
8
x
0,0
2,0
4,0
6,0
8,0
10,0
12,0
14,0
16,0
y
0,0
3,5
6,0
7,5
8,0
7,5
6,0
3,5
0,0
4
+4
p
1 p
= z z2 + 4 + 4 ln(z + z2 + 4)
2
−4
o
√
1n √
4 16+4 + 4 ln(4+ 16+4) +
=
2
o
√
1n √
− −4 16+4 + 4 ln(−4+ 16+4)
2
√ o 1n √
√ o
1n √
=
4 20 + 4 ln(4+ 20) − −4 20 + 4 ln(−4+ 20)
2
2
1
= {(4 × 4,47 + 4 ln(8,47)) − (−4 × 4,47 + 4 ln(0,47))}
2
1
= {(17,88 + 4(2,14)) − (−17,88 + 4(−0,76))}
2
1
1
= {(17,88 + 8,56) − (−17,88 − 3,04)} = (22,44) − (20,92)
2
2
47,36
= 23,68 m .
=
2
Deslocamento: (16,0 m)ı̂, calcule.
Problema 6.8. Um ponto descreve uma trajetória de equações paramétricas:
x = (0,1 m/s) t
y = (4 m/s) t − ( 1 m/s2 ) t2 .
2
Pede-se:
“ADT-MF” — 2005/11/7 — 8:51 — page 291 — #291
291
6.7. Espaço percorrido num movimento qualquer
Figura 6.27: Movimento parabólico, espaço percorrido medido no gráfico com uma
linha: 23,4 m (ADT), Probl. 6.7.
1. fazer o gráfico da curva-suporte da trajetória entre t = 0 s e t = 8 s;
2. determinar o vetor deslocamento entre t = 0 s e t = 8 s;
3. calcular o espaço percorrido entre t = 0 s e t = 8 s.
Respostas Temos: (veja Fig. 6.28)
x = 0,1t ; y = 4t − 21 t2
v x = 0,1 ; vy = 4 − t
e o espaço infinitesimal percorrido no intervalo de tempo dt será:
p
ds = 0,01 + (4 − t)2 dt
Z
⇒
s=
8
p
0,01 + (4 − t)2 dt
0
para calcular essa integral podemos fazer z = 4−t, daí dz = −dt, associados aos
limites de integração: t = 0 7→ z = 4 e t = 8 7→ z = −4, donde, levando em conta
(6.16) para c2 = (0,1)2 :
“ADT-MF” — 2005/11/7 — 8:51 — page 292 — #292
292
Capítulo 6. Cinemática
Z
s=−
−4
p
Z
4
0,01 + z2 dz =
4
p
0,01 + z2 dz
−4
p
+4
p
= 21 z z2 + 0,01 + 0,01 ln(z + z2 + 0,01)
n p
o −4
p
1
= 2 4 0,01+16 + 0,01 ln(4+ 0,01+16) +
n p
o
p
− 12 −4 0,01+16 + 0,01 ln(−4+ 0,01+16)
n p
o
p
= 21 4 16,01 + 0,01 ln(4+ 16,01) +
n p
o
p
− 12 −4 16,01 + 0,01 ln(−4+ 16,01)
= 21 (4 × 4,0012 + 0,01 ln(4 + 4,0012)) +
− 12 (−4 × 4,47 + 0,01 ln(−4 + 4,0012))
=
=
=
=
=
1
2 {(16,00 + 0,01 ln(8,00)) − (−16,00 + 0,01 ln(0,0012))}
1
2 (16,00 + 0,01(2,823)) − (−16,00 + 0,01(−6,73))
1
2 (16,00 + 0,02828) − (−16,00 − 0,0673)
1
1
2 (16,028) − (−16,067) = 2 (16,028) + (16,067)
32,10
= 16,05 m .
2
Deslocamento:
∆~r = (x8 − x0 )ı̂ + (y8 − y0 ) ̂
= (0,8 − 0,0)ı̂ + (0 − 0) ̂ = (0,8 m)ı̂ .
√
É fácil demonstrar que o termo c2 ln(z + c2 + z2 ) tende para zero quando
c → 0, deste modo a fórmula (6.16) se reduz a:
Z p
Z p
1 p 2 1
z z = [z |z|]
lim
c2 + z2 dz =
z2 dz =
c→0
2
2
em que |z| é o módulo de z. Assim, se um corpo descreve uma trajetória de
equações paramétricas
1
x = v0 t − 2 at2
y = 0 ,
a velocidade para um instante qualquer t será v = v0 −at e o espaço infinitesimal percorrido no intervalo de tempo dt será:
q
ds = (v0 − at)2
“ADT-MF” — 2005/11/7 — 8:51 — page 293 — #293
293
6.7. Espaço percorrido num movimento qualquer
e o espaço percorrido no intervalo de tempo de 0 a t será:
Z
t
s=
0
q
(v0 − at)2 dt .
Pondo z = v0 −at, vem dz = −adt, dt = −(1/a)dz, com os limites de integração
determinados por meio de z(t), assim:
Z
Z
q
q
1 v0 −at
1 v0
2
(z) dt =
(z)2 dz
s=−
a v0
a v0 −at
Z
1 v0
1 v0
|z| dz =
=
z |z|
a v0 −at
2a
v0 −at
1
=
v0 |v0 | − (v0 − at) |v0 − at| .
2a
Se v0 > 0, |v0 | = v0 e se tem que
s=
1 2
v0 − (v0 − at) |v0 − at| ,
2a
(6.17)
em que |v0 − at| é o módulo de v0 − at.
Figura 6.28: Movimento parabólico, Probl. 6.8, com projeção de velocidade sobre o
eixo Ox bem menor que o correspondente da Fig. 6.27.
“ADT-MF” — 2005/11/7 — 8:51 — page 294 — #294
294
Capítulo 6. Cinemática
Problema 6.9. Um corpo se desloca em linha reta, descrevendo uma trajetória
de equações paramétricas:
1
x = v0 t − 2 a t2
y = 0 ,
em que v0 = 20 m/s e a = 10 m/s2 . Pede-se seu vetor deslocamento em relação
à posição correspondente a t = 0 s, e o espaço percorrido em relação a t = 0 s
para os instantes t = 2 s, 3 s e 4 s.
Respostas Deslocamentos:
t = 2s
x2 = (20 m/s)(2 s) − 12 (10 m/s2 )(2 s)2
= 40 m − 20 m = 20 m
t = 3s
x3 = (20 m/s)(3 s) − 21 (10 m/s2 )(3 s)2
= 60 m − 45 m = 15 m
t = 4s
x3 = (20 m/s)(4 s) − 21 (10 m/s2 )(4 s)2
= 80 m − 80 m = 0 m
Espaços: usando-se a fórmula (6.17) deduzida anteriormente e considerando
σ = |vv00 −at
−at| se tem:
1
−1 2
−1
−2
2
t = 2s
s2 =
(20
m
s
)
−
σ(20
m
s
−
10
m
s
·
2
s)
2 · 10 m s−2
1
2 −2
−1
−1 2
=
(400 m s ) − (20 m s − 20 m s )
20 m s−2
400 m2 s−2
= 20 m
=
20 m s−2
1
−1 2
−1
−2
2
t = 3s
s3 =
(20
m
s
)
−
σ(20
m
s
−
10
m
s
·
3
s)
2 · 10 m s−2
1
2 −2
−1
−1 2
=
(400
m
s
)
+
(20
m
s
−
30
m
s
)
20 m s−2
50
1
2 −2
2 −2
=
m = 25 m
(400
m
s
)
+
(100
m
s
)
=
2
20 m s−2
1
−1 2
−1
−2
2
t = 4s
s4 =
(20
m
s
)
−
σ(20
m
s
−
10
m
s
·
4
s)
2 · 10 m s−2
1
2 −2
−1
−1 2
(400
m
s
)
+
(20
m
s
−
40
m
s
)
=
20 m s−2
80
m = 40 m .
=
2
“ADT-MF” — 2005/11/7 — 8:51 — page 295 — #295
295
6.7. Espaço percorrido num movimento qualquer
Problema 6.10. Deduza a expressão (6.17), i.e.,
s=
1 v0 |v0 | − (v0 − a t) |v0 − a t|
2a
(6.18)
a partir da equação x = v0− 21 a t2 (da qual se tira v = v0−at). A expressão (6.18)
pode ser escrita sob a forma
s=
1 2
v0 ± (v0 − a t)2 ,
2a
o sinal positivo (+) valendo quando a t > v0 , e o sinal negativo (−) quando
a t < v0 .
“ADT-MF” — 2005/11/7 — 8:51 — page 296 — #296
296
“ADT-MF” — 2005/11/7 — 8:51 — page 297 — #297
Capítulo 7
Estudo da Aceleração†
7.1
Aceleração
Suponhamos que um ponto se desloque sobre uma curva, tendo velocidade ~v1
e ~v2 , nas posições P1 e P2 , por onde passa nos instantes t1 e t2 . A variação do
vetor velocidade durante o intervalo de tempo ∆t = t2 −t1 é o vetor ∆~v =~v2 −~v1 .
Para obtermos na Fig. 7.1 esse vetor ∆~v, traçamos por P1 um segmento de reta
orientado equipolente a ~v2 , e que é indicado na Fig. 7.1 pela mesma letra, o
vetor ∆~v é representado pelo segmento orientado tal que ~v1 +∆~v =~v2 .
Figura 7.1: Ilustração para o vetor ∆~v = ~v2 − ~v1 das velocidades associadas aos instantes t1 e t2 .
No estudo do movimento de um ponto é muito importante conhecer a variação da velocidade por unidade de tempo, que, sendo uma razão entre um
vetor ∆~v e um escalar ∆t, é ainda um vetor denominado aceleração média no
†
Ver o Preâmbulo do Fascículo VI em A.6, página 588.
297
“ADT-MF” — 2005/11/7 — 8:51 — page 298 — #298
298
Capítulo 7. Estudo da Aceleração
intervalo de tempo ∆t:
∆~v
.
∆t
O limite dessa razão quando ∆t → 0 se denomina aceleração instantânea calculada no ponto P1 , ou no instante t1 :
~v(t1 + ∆t) − ~v(t1 )
∆~v
d~v ~a(t1 ) = lim
= lim
=
,
∆t→0 ∆t
∆t→0
∆t
dt t1
~am =
que é o vetor derivada da função vetorial ~v(t), calculada no instante dado t1 .
Desse modo, teremos assim,
~a =
Isto é, a aceleração ~a = a x
d~v d =
v x ı̂ − vy ̂
dt
dt !
!
dvy
dv x
=
ı̂ −
̂ .
dt
dt
ay terá componentes
ax =
dv x
dt
e
ay =
dvy
dt
num sistema de eixos ortogonais cartesianos.
É claro que d~v = ~a dt, e assim, somando esses vetores infinitesimais obtemos:
Z
Z
~v2
~v2 − ~v1 =
t2
~a dt .
d~v =
~v1
t1
Podemos exprimir essa diferença, usando o vetor aceleração média:
∆~v ~v2 − ~v1
=
∆t
t2 − t1
(t
~v2 − ~v1 = ~am 2 − t1 ) .
~am =
As fórmulas correspondentes para os eixos de x e y são:
Z t2
v x2 − v x1 =
a x dt
t1
Z t2
vy2 − vy1 =
ay dt ,
ou
t1
v x2 − v x1 = amx (t1 − t2 )
vy2 − vy1 = amy (t1 − t2 ) .
“ADT-MF” — 2005/11/7 — 8:51 — page 299 — #299
299
7.2. Componentes normal e tangencial da aceleração
7.2
Componentes normal e tangencial da aceleração
Para estudo do movimento de um
ponto é muito importante obter as
componentes da aceleração em duas
componentes ortogonais, uma tangente à trajetória, ~at , e a outra normal a essa trajetória, ~an :
~a = ~at + ~an .
Para obtermos essas componentes consideremos dois instantes t1 e
t2 , nos quais P ocupa as posições P1
e P2 com velocidades ~v1 e ~v2 respectivamente, veja Fig. 7.2. Temos:
∆~v = ~v2 − ~v1 . Decomponhamos ∆~v
em duas direções do seguinte modo: Figura 7.2: Decomposição do vetor ∆~v setomamos o segmento representativo gundo a direção tangente e normal à trajede ~v1 (com reta suporte passando por tória na posição ocupada no instante t.
P1 ) e o rebatemos sobre o segmento
representativo de ~v2 , fazendo centro em P1 , obtemos o segmento orientado ~v10
de mesmo módulo que ~v1 , mas cuja direção é a de ~v2 , as duas componentes de
∆~v serão ∆~vt e ∆~vn , em que
∆~vt = ~v2 − ~v10
∆~vn = ~v 0 − ~v1 ,
1
temos
∆~v = ∆~vt + ∆~vn ,
e assim,
∆~v
∆→0 ∆t
∆~vt
∆~vn
= lim
+ lim
.
∆→0 ∆t
∆→0 ∆t
~a = lim
Para calcular esses limites, podemos pôr
n
o
∆~vt = |~v2 | − |~v10 | τ̂0 ,
(7.1a)
(7.1b)
“ADT-MF” — 2005/11/7 — 8:51 — page 300 — #300
300
Capítulo 7. Estudo da Aceleração
em que τ̂0 é o versor de ~v2 , com o sentido de ~v2 , o que acarreta que a diferença
~v2 − ~v10 será de mesmo sentido que ~v2 se |~v2 | > |~v1 | (Fig. 7.2); mas de sentido
contrário se |~v2 | < |~v1 |, neste caso, a diferença |~v2 |−|~v1 | < 0 é negativa e inverte o
sentido de τ̂0 , dando assim um vetor ∆~vt de contido contrário, a Fig. 7.3 ilustra
este caso.
Figura 7.3: Mesma situação da Fig. 7.2 para o caso em que o módulo da velocidade
diminui, i.e., |~v2 | < |~v1 |.
Podemos assim representar
∆~vt = ∆|~v| τ̂0 ,
(7.2)
em que ∆|~v| significa a variação do módulo do vetor velocidade durante o intervalo de tempo ∆t.
Aceleração tangencial Vamos examinar o primeiro limite de (7.1b). Usando
a relação (7.2), temos:
!
∆~vt
∆|~v | 0
lim
= lim
τ̂
∆t→0 ∆t
∆t→0 ∆t
!
∆|~v | = lim
lim τ̂ 0 ,
∆t→0 ∆t
∆t→0
mas
∆|~v | d|~v |
=
∆t→0 ∆t
dt
lim
e
lim τ̂ 0 = τ̂ ,
∆t→0
“ADT-MF” — 2005/11/7 — 8:51 — page 301 — #301
301
7.2. Componentes normal e tangencial da aceleração
donde
∆~vt d|~v |
=
τ̂ .
∆t→0 ∆t
dt
Isto é, esse vetor limite é igual ao produto do escalar derivada do módulo do
vetor velocidade pelo versor da tangente à curva no ponto considerado 1 , tratase pois da componente tangencial da aceleração (a aceleração tangencial),
tangente à curva no ponto dado, isto é,
lim
~at =
d|~v |
τ̂ .
dt
(7.3)
Aceleração normal Vejamos agora o segundo limite de (7.1b). Na Fig. 7.3 e
na Fig. 7.4, indicamos o versor do vetor ∆~vn por n̂ 0 , de modo que: (veja também a Fig. 7.2)
∆~vn = |∆~vn | n̂ 0 .
Ora, o módulo do vetor ∆~vn é o comprimento da corda que subtende o arco de
Figura 7.4: Geometria para a aceleração normal.
comprimento ∆w descrito pelo segmento representativo de ~v1 quando rebatemos esse vetor sobre a direção de ~v2 para obter o vetor ~v10 , o ângulo entre os
dois vetores ~v1 e ~v2 sendo o mesmo ângulo ∆θ entre as duas tangentes à curva
nos pontos P1 e P2 da trajetória (paralelas a ~v1 e a ~v2 ), e no limite podemos
substituir o comprimento dessa corda pelo respectivo comprimento de arco,
pois que:
∆w
|∆~vn |
lim
= 1.
=1
ou
lim
∆w→0 ∆w
vn |
|∆~vn |→0 |∆~
1
u
derado.
Isto é, vetor de módulo 1, adimensional, com o sentido da velocidade no ponto consi-
“ADT-MF” — 2005/11/7 — 8:51 — page 302 — #302
302
Capítulo 7. Estudo da Aceleração
Temos assim:
!
∆~vn
|∆~vn | 0
lim
= lim
n̂
∆t→0 ∆t
∆t→0
∆t
!
|∆~vn | ∆w 0
= lim
n̂
∆t→0 ∆w ∆t
!
!
|∆~vn |
∆w = lim
lim
lim n̂ 0
∆t→0 ∆t
∆t→0
∆t→0 ∆w
!
∆w
= 1 lim
lim n̂ 0 ,
∆t→0 ∆t
∆t→0
visto que o primeiro limite tende para 1 (um), como se viu anteriormente. Ora,
∆w = |~v1 | ∆θ, portanto:
!
|~v1 | ∆θ ∆~vn
= lim
lim n̂ 0 .
∆t→0 ∆t
∆t→0
∆t→0 ∆t
lim
Quando ∆t → 0, ∆θ → 0, e então
lim n̂ 0 = n̂ ,
∆t→0
que é o versor da normal ao vetor ~v1 , deste modo se tem que:
∆~vn
∆θ
= |~v1 | n̂ lim
.
∆t→0 ∆t
∆t→0 ∆t
lim
7.3
(7.4)
Raio de curvatura, curvatura e aceleração
tangencial
Examinemos agora o limite do segundo membro da equação (7.4). Para tanto,
recordaremos alguns dados de geometria. Veja Fig. 7.5. Nela traçamos uma
circunferência de círculo de raio (de curvatura) R. Como sabemos, o arco ∆s
correspondente ao ângulo central ∆θ é dado pela expressão 2
R ∆θ = ∆s ,
2
u Essa é a definição para medição do ângulo α = ∆θ, sendo o radiano a unidade natural
para expressar medida de ângulo, seja um ângulo central ou não. Veja a definição de radiano no
SI [3, 30].
“ADT-MF” — 2005/11/7 — 8:51 — page 303 — #303
303
7.3. Raio de curvatura e curvatura
Figura 7.5: Geometria do círculo.
quando se usa radiano para expressar a medida do ângulo ∆θ, deste modo:
R=
∆s
∆θ
e fazendo
1
∆θ
=κ=
,
R
∆s
em que κ, o inverso do raio R, denomina-se curvatura. Observe que o ângulo
central ∆θ é igual ao ângulo formado pelas duas (retas) tangentes ao círculo
nos pontos P1 e P2 , pois que são ortogonais aos raios R correspondentes e que
são os lados do ângulo central ∆θ.
No caso do círculo de raio R fica claro que
lim
∆θ→0
∆s
=R
∆θ
e
lim
∆s→0
∆θ 1
= =κ,
∆s R
ou ainda
lim
∆s→0
∆θ
1
=
= κ1 ,
∆s R1
em que se designou pelo índice 1 o “raio de curvatura e a curvatura do círculo
calculados no ponto P1 ”.
Voltemos ao caso geral de uma curva qualquer, veja Fig. 7.6. Suponhamos
dois pontos P1 e P2 de uma curva que definem o arco (de comprimento) ∆s
sobre ela; tomemos as tangentes à curva nos pontos P1 e P2 , e as normais
(com direções determinadas pelos versores) n̂ e n̂ 0 nesses mesmos pontos.
Neste caso teremos as seguintes definições:
∆s
ρm =
∆θ
∆θ
κm =
,
∆s
que se denominam respectivamente raio de curvatura médio e curvatura média da curva entre os pontos P1 e P2 , e o limite
∆s ds
=
= ρ1
∆θ→0 ∆θ
dθ
lim
“ADT-MF” — 2005/11/7 — 8:51 — page 304 — #304
304
Capítulo 7. Estudo da Aceleração
Figura 7.6: Geometria das normais e das tangentes à uma curva qualquer nos pontos
P1 e P2 .
denomina-se raio de curvatura da curva no ponto P1 , e
lim
∆s→0
∆θ dθ
1
=
=
= κ1
∆s ds ρ1
denomina-se curvatura da curva no ponto P1 .
Observe-se que o ponto 0, ponto de encontro das normais N1 e N2 (cf. Fig. 7.6), é o centro médio de curvatura entre os pontos P1 e P2 , e o ponto 01 é o
centro de curvatura da curva no ponto P1 , a distância P1 0 = ρ1 , como é óbvio.
Retornemos ao nosso problema. No cálculo do limite da fórmula (7.4),
temos:
!
∆θ ∆s
∆θ
= lim
lim
∆t→0 ∆s ∆t
∆t→0 ∆t
!
!
∆θ
∆s
lim
,
= lim
∆s→0 ∆s ∆t→0 ∆t
como se viu anteriormente
lim
∆s→0
∆θ
1
=
∆s ρ1
e
lim
∆t→0
∆s
= |~v1 | ,
∆t
portanto
∆θ |~v1 |
=
∆t→0 ∆t
ρ1
lim
“ADT-MF” — 2005/11/7 — 8:51 — page 305 — #305
305
7.3. Raio de curvatura e curvatura
e, levando esse valor em (7.4), temos finalmente:
∆~vn
|~v1 |2
=
n̂ ,
∆t→0 ∆t
ρ1
lim
que é um vetor normal à curva no ponto P1 , trata-se portanto da componente
normal ~an da aceleração no ponto considerado (da curva, quando passa com
velocidade ~v1 ), como queríamos demonstrar.
~an =
|~v1 |2
n̂ ,
ρ1
e assim: ~a = ~at + ~an , como procurávamos. Em resumo:
d|~v |
~at =
τ̂ .
dt
|~v1 |2
~
a
=
n̂ .
n
ρ
(7.5)
1
Observação Quando o ponto se move sobre a curva, veja Fig. 7.7, fixando
sobre ela um ponto P1 , no qual a velocidade é ~v1 , e um ponto P2 , no qual a
velocidade é ~v2 , para estudarmos a variação da velocidade, tiramos por P1 um
vetor equipolente a ~v2 , definindo-se desse modo o ângulo ∆θ2 . Se considerar-
Figura 7.7: Ilustração para a velocidade angular média
∆θ
∆t .
mos o ponto P movendo-se sobre a curva com velocidade ~v = ~v(t) e traçarmos
por P1 o vetor (velocidade) equipolente a ~v em P, o ângulo ∆θ é o ângulo de
que gira a reta tangente à curva em P, quando se move sobre a curva, e a razão
∆θ/∆t é a velocidade angular média do ponto sobra a curva, e
∆θ
=ω
∆t→0 ∆t
lim
“ADT-MF” — 2005/11/7 — 8:51 — page 306 — #306
306
Capítulo 7. Estudo da Aceleração
é a velocidade angular instantânea calculada no ponto P1 .
Retornaremos a este caso quando estudarmos o movimento circular (cf.
pág. 312).
Vejamos agora algumas expressões matemáticas facilmente obteníveis do
que já se viu.
7.4
Expressão cartesiana do raio de curvatura e da
curvatura
Seja a expressão paramétrica da trajetória de um ponto P num plano:
x = x(t)
y = y(t) .
Pelas fórmulas estudadas podemos obter a velocidade e aceleração do ponto
em cada instante t, bem como o espaço percorrido pelo ponto para qualquer
intervalo de tempo e o seu deslocamento no espaço. 3
A aceleração está sempre voltada para a concavidade da curva, e fará um
ângulo θ com a velocidade, e sendo ~at = at τ̂ e ~an = an n̂ as componentes tangencial e normal da aceleração ~a, teremos: (cf. Fig. 7.8)
Figura 7.8: Componentes normal e tangencial em um movimento circular do ponto P.
at = |~a| cos θ
an = |~a| sen θ .
Mas essas expressões, usando-se o Cálculo Vetorial, poderão ser escritas
de outro modo, pois o produto escalar de ~a por ~v é:
~a · ~v = |~a| |~v| cos θ ,
3
u
Para o domínio temporal em que a trajetória é dada por (x(t), y(t)).
“ADT-MF” — 2005/11/7 — 8:51 — page 307 — #307
307
7.4. Expressão cartesiana do raio de curvatura e da curvatura
assim, dividindo pelo módulo de ~v, temos
~a · ~v
= |~a| cos θ = at .
|~v|
Analogamente, o produto vetorial de ~a por ~v em módulo nos dá:
|~a ∧ ~v| = |~a| |~v| sen θ
e dividindo pelo módulo de ~v:
|~a ∧ ~v|
= |~a| sen θ = an .
|~v|
Segue-se que os módulos serão:
|~a · ~v|
|~at | =
|~v|
|~a ∧ ~v|
,
|~an | =
|~v|
mas
|~an | =
(7.6)
|~v|2
,
ρ
onde ρ é o raio de curvatura da trajetória na posição ocupada por P no instante
t, donde
|~v|2 |~a ∧ ~v|
=
,
ρ
|~v|
|~v|3
ρ
=
|~a ∧ ~v|
(7.7)
1 |~a ∧ ~v|
.
κ = ρ =
|~v|3
Passar para a expressão cartesiana é muito fácil; de fato, as componentes
cartesianas da velocidade e da aceleração sendo como já se viu:
!
dx dy dz
~v = v x , vy , vz =
, ,
dt dt dt
!
!
dv x dvy dvz
d2 x d2 y d2 z
~a = a x , ay , az =
,
,
=
,
,
dt dt dt
dt2 dt2 dt2
como
“ADT-MF” — 2005/11/7 — 8:51 — page 308 — #308
308
Capítulo 7. Estudo da Aceleração
!2
!2 12
1 dx !2
dy
dz
2
2
2 2
+
+
|~v| = v x + vy + vz =
dt
dt
dt
e
~a · ~v = a x v x + ay vy + az vz
=
d2 x dx d2 y dy d2 z dz
+ 2
+
dt2 dt
dt dt dt2 dt
e
1
2 2 2
̂ k̂
ı̂
2
a
a
a
a
a
a
y
z
z
x
x
y
|~a ∧ ~v| = a x ay az =
+
+
.
vy vz vz v x v x vy
v x vy vz
Portanto
at =
an =
d2 x dx d2 y dy d2 z dz
+ 2
+
dt2 dt
dt dt dt2 dt
!
!2
!2 12
dx 2
dy
dz
+
+
dt
dt
dt
2
d y d2 z 2 d2 z d2 x 2 d2 x
dt2 dt2 dt2 dt2 dt2
+ dz dx +
dz dx
dt
dt
dy
dt
dt
dt
1
2
d2 y 2
2
dt
dy
dt
(7.8)
!
!2
!2 12
dx 2
dy
dz
+
+
dt
dt
dt
Se a curva está no plano Oxy, z = 0 e neste caso as componentes em z são nulas,
obtém-se:
d2 x dx d2 y dy
+ 2
2 dt
dt
dt dt
at =
!
!2 12
2
dy
dx
+
dt
dt
2
(7.9)
2
d 2x d 2y
dtdx dtdy
dt
dt
a
=
n
!
!2 12
dx 2
dy
+
dt
dt
“ADT-MF” — 2005/11/7 — 8:51 — page 309 — #309
7.4. Expressão cartesiana do raio de curvatura e da curvatura
Observe-se a simplicidade das fórmulas (7.6) e (7.7), e a extensão das expressões (7.8) ou (7.9), que entretanto são facilmente obteníveis das (7.6) e
(7.7), conhecidas as expressões do produto escalar e do produto vetorial em
eixos cartesianos.
A curvatura κ da curva 4 é facilmente obtida da (7.7), bastando dividir-se a
expressão de |~an | pelo quadrado do módulo de ~v
κ=
|~a ∧ ~v| |~an |
= 2 .
|~v|3
|~v|
Damos sua expressão cartesiana apenas no plano 5 :
2
d 2x d22y dt dt
dx dy dt
dt
κ=
!2
!2 23
dx
dy
+
dt
dt
O raio de curvatura
ρ=
1
.
κ
Observação O estudante não deve se impressionar com essas fórmulas muito extensas, e não deve procurar retê-las de memória, mas apenas aprender a
deduzi-las, conhecendo as expressões do produto escalar e do produto vetorial
(em coordenadas cartesianas).
4
5
u Na posição do ponto correspondente ao instante considerado.
O estudante deverá exprimir a expressão (tridimensional) por completo como treino
de matemática.
309
“ADT-MF” — 2005/11/7 — 8:51 — page 310 — #310
310
“ADT-MF” — 2005/11/7 — 8:51 — page 311 — #311
Capítulo 8
Movimento de um ponto
Podemos agora classificar os vários tipos de movimento de um ponto no plano.
Quanto à trajetória o movimento se divide em retilíneo e curvilíneo. No
movimento retilíneo o ponto descreve uma trajetória em linha reta; no movimento curvilíneo a trajetória descreve uma linha curva.
Quanto ao modo pelo qual ele descreve o movimento, este se classifica em
uniforme ou acelerado; no caso da trajetória curvilínea é claro que o movimento é sempre acelerado, entretanto, quando o módulo do vetor velocidade é
constante, o movimento, mesmo curvilíneo, costuma denominar-se uniforme,
pois ele percorre espaços iguais em tempos iguais; um caso particular muito
importante é aquele em que o ponto descreve uma circunferência, o módulo do
vetor velocidade permanecendo constante, tal movimento se denomina movimento circular uniforme. Para distinguir os vários tipos de movimento podemos considerar as componentes normal e tangencial da aceleração.
8.1
Movimento de um ponto no plano
8.1.1
Movimento retilíneo – trajetória retilínea
A trajetória sendo uma linha reta, a componente normal da aceleração é sempre
nula, pois é nula a curvatura de uma reta, sendo infinito seu raio de curvatura,
assim an = v2 /ρ = 0, pois ρ = ∞. 1
1
u Entenda-se que o símbolo ∞, ou o termos infinito, não significa um dado número real,
significa, sim, um jogo sem resultado e sem vencedor: dê-me um valor que responderei com um
de maior valor e receberei como resposta outro ainda maior. . .
311
“ADT-MF” — 2005/11/7 — 8:51 — page 312 — #312
312
Capítulo 8. Movimento de um ponto
8.1.1.1
Movimento retilíneo uniforme
Neste caso o vetor velocidade, i.e., o vetor ~v, é sempre constante, portanto o
vetor aceleração é sempre nulo: ~at = 0, ~an = 0, daí ~at +~an =~a = ~0.
8.1.1.2
Movimento retilíneo uniformemente variado
O vetor ~v tem direção constante, seu módulo porém varia numa razão constante, isto é, a componente tangencial ~at da aceleração é constante. 2
8.1.1.3
Movimento retilíneo variado
A aceleração tangencial ~at é qualquer. 3
8.1.2
8.1.2.1
Movimento curvilíneo
Movimento circular
A trajetória ocorre sobre a circunferência de um círculo de raio R, neste caso,
o raio de curvatura ρ é constante ao longo do movimento e igual ao raio do
círculo, i.e., ρ = R.
8.1.2.2
Movimento circular uniforme
O módulo do vetor velocidade é constante, isto é, v = |~v| = cte , por conseguinte
a aceleração tangencial é nula, ~at = ~0. Segue-se que
. a aceleração normal ~an é constante em módulo, i.e., |~an | = v2 /R = cte ,
. ~a =~an , (i.e., a aceleração total é igual a aceleração normal)
. a direção da aceleração é sempre dirigida para o centro do círculo, e por
isso recebe o nome de aceleração centrípeta.
8.1.2.3
Movimento circular uniformemente acelerado
Neste caso a aceleração tangencial é constante em módulo |~at | = cte , e a aceleração normal ~an tem módulo mas a direção e o sentido são dirigidos para o
centro de curvatura, que coincide com o centro do círculo.
2
3
u
u
O que se pode dizer sobre a componente normal da aceleração?
Mas com direção constante, paralela à reta suporte do movimento retilíneo.
“ADT-MF” — 2005/11/7 — 8:51 — page 313 — #313
313
8.1. Movimento de um ponto no plano
8.1.2.4
Movimento curvilíneo qualquer
Neste caso a velocidade pode variar em direção, módulo e sentido; a aceleração
também. Pode haver pontos (associados a determinados instantes) em que a
aceleração normal seja nula, i.e., ~an = ~0 ⇒ |~an | = 0, o que só pode acontecer
(ser observado):
. se ~v = ~0, uma vez que v = 0, e daí |~an | = 0, ou
. se ρ (o raio de curvatura) for infinito quando ~v , ~0, uma vez que
|~an | =
v2
=0ev,0
ρ
acarreta ρ = ∞ ,
neste ponto a aceleração normal muda de sentido, 4 passando pelo (valor)
zero; a concavidade da curva passa para o outro lado da reta tangente à
curva que passa pelo ponto (pela posição) em que acontece ~an = ~0. Tal
ponto se denomina ponto de inflexão, veja Fig. 8.1.
Figura 8.1: Sempre que uma partícula passar pela posição Pinf sobre a curva, o ponto
de inflexão da curva, a componente normal da aceleração será nula.
8.1.3
Espaço percorrido
Um problema interessante e necessário na prática é determinar o espaço percorrido num intervalo de tempo determinado. O problema é porém de fácil
solução se soubermos como varia o módulo do vetor velocidade em função do
tempo, isto é, se tivermos a função: 5
|~v| = v(t) ,
4
5
u
u
Em relação ao que ocorre quando o ponto passa na vizinhança deste ponto.
Se se conhece ~r(t) = x(t)ı̂+y(t) ̂ (ver §6.6), então ~v(t) = v x (t)ı̂+vy (t) ̂, dai
q
2
2
v(t) = v x (t) + vy (t) .
(8.1)
“ADT-MF” — 2005/11/7 — 8:51 — page 314 — #314
314
Capítulo 8. Movimento de um ponto
em que |~v| é o módulo da velocidade e v(t) é uma função do tempo que em cada
instante nos dá o valor desse módulo, como já vimos 6
ds = |~v| dt ,
dai
Z
s − s0 =
8.1.4
t
v(t) dt .
(8.2)
t0
Gráfico
Para realizar a expressão (8.2), costuma-se recorrer ao gráfico da função (8.1).
Veja Fig. 8.2.
Figura 8.2: Gráfico do módulo da velocidade (v) em função do tempo (t).
Tomemos um sistema de eixos ortogonais, as abscissas serão a variável
independente, o tempo neste caso; as ordenadas, o módulo do vetor velocidade.
Suponhamos os instantes (vizinhos) t e t0 = t +dt, que diferem entre si de
um intervalo de tempo infinitesimal dt.
O espaço percorrido no intervalo de tempo dt é ds = |~v | dt, no gráfico esse
espaço será a área hachurada da figura, e somando-se todos os espaços ds em
que pode ser subdividido o espaço s − s0 vem:
Z
s − s0 =
6
u
t
|~v| dt
t0
Ver §6.7.3, onde se fez a primeira apresentação do tema.
“ADT-MF” — 2005/11/7 — 8:51 — page 315 — #315
315
8.1. Movimento de um ponto no plano
e no gráfico da Fig. 8.2 esse espaço vai corresponder à área compreendida entre
o eixo dos tempos, de t0 a t: |~v0 | = v(t0 ) e |~v| = v(t), e a curva representa a função
|~v| = v(t).
Vejamos alguns casos.
8.1.4.1
Movimento retilíneo uniforme
A velocidade tem sempre o mesmo valor constante v(t) = v0 , o gráfico é representado na Fig. 8.3. A curva que representa no gráfico o módulo da velocidade
Figura 8.3: Gráfico do módulo da velocidade (v) em função do tempo (t) para um
movimento retilíneo uniforme.
se reduz a uma reta paralela ao eixo dos tempos, veja Fig. 8.3. Teremos:
Z t
Z t
dt
s − s0 =
v0 dt = v0
t0
t0
= v0 (t − t0 ) .
Esse resultado pode facilmente ser obtido calculando-se diretamente a área do
retângulo de altura v0 e base t−t0 .
Se t0 = 0 e s0 = 0, isto é, se começarmos a contar os tempos na origem dos
espaços, então s = v0 t.
8.1.4.2
Movimento retilíneo uniformemente acelerado
Neste caso
d|~v|
= a0 ,
dt
sendo a0 constante positiva 7 e portanto:
7
u
Está-se considerando neste caso que o módulo da velocidade é crescente.
“ADT-MF” — 2005/11/7 — 8:51 — page 316 — #316
316
Capítulo 8. Movimento de um ponto
d|~v| = a0 dt
Z t
a0 dt
d|~v| =
t0
v0
Z t
v − v0 = a0
dt
Z
v
t0
v − v0 = a0 (t − t0 )
v = v0 + a0 (t − t0 ) .
Este resultado também pode ser obtido fazendo-se o gráfico da aceleração em
função do tempo; veja o gráfico da aceleração na Fig. 8.4. Como a aceleração
Figura 8.4: Gráfico da aceleração constante positiva (a) em função do tempo (t) para
um movimento retilíneo uniformemente acelerado.
é constante, o gráfico da aceleração (a) em função do tempo (t) fornece uma
reta paralela ao eixo dos tempos, e assim a variação da velocidade entre t0 e t1
vai corresponder no gráfico à área do retângulo compreendida entre o eixo dos
tempos, do instante t0 ao instante t1 , e o gráfico da aceleração em função do
tempo. Do gráfico, se v(t0 ) = v0 e se v(t) = v, então se obtém a expressão
v − v0 = a (t − t0 ) ,
v(t) = v0 + a (t − t0 ) ,
correspondente a essa área.
Deste resultado podemos obter o espaço percorrido, pois já temos a expressão do módulo da velocidade, podendo-se construir assim o seu gráfico.
De fato, a função v(t) = v0 + a (t−t0 ) vai dar uma reta (veja Fig. 8.5), e a área
entre o eixo dos tempos e as ordenadas v0 e v1 , correspondentes aos instantes
t = t0 e t = t1 , é a área de um trapézio de bases v0 e v1 e altura t1 −t0 . Essa área é
portanto a semi-soma das bases vezes a altura, isto é, o espaço:
1
(v0 + v1 ) (t1 − t0 ) ,
2
mas v(t) = v0 + a (t − t0 ), logo, sendo t1 um instante genérico t,
s1 − s0 =
“ADT-MF” — 2005/11/7 — 8:51 — page 317 — #317
317
8.1. Movimento de um ponto no plano
Figura 8.5: Gráfico do módulo da velocidade (v) em função do tempo (t) para um
movimento retilíneo uniforme.
s(t) − s0 =
o
1n
v0 + v0 + a t − t0
t − t0 ,
2
portanto
s(t) − s0 = v0 (t − t0 ) + 12 a (t − t0 )2 .
(8.3)
Observação A expressão do módulo do vetor deslocamento 8 é igual a expressão do espaço percorrido dado em (8.3). Porquê? E se a aceleração for
negativa?
8.1.4.3
Movimento retilíneo uniformemente retardado
Como, independentemente da aceleração constante ser positiva ou negativa,
v(t) = v0 + a (t − t0 ) ,
então por integral obteríamos:
Z t
Z t
[v0 + a (t − t0 )] dt
ds =
t0
t0
Z t
=
[v0 dt + a (t − t0 ) dt]
t0
Z t
Z t
Z t
=
v0 dt +
at dt −
at0 dt
t0
t0
t0
t
t
= v0 (t − t0 ) + 21 at2 − at0 t
t0
t0
1
2
2
= v0 (t − t0 ) + at −
8
u
1
2
at02
− at0 t + at02 =
Para o caso do movimento retilíneo, para o caso de aceleração positiva e para t ≥ t0 .
“ADT-MF” — 2005/11/7 — 8:51 — page 318 — #318
318
Capítulo 8. Movimento de um ponto
s − s0 = v0 (t − t0 ) + 12 a t2 − 2 t t0 + t02 ,
portanto
s − s0 = v0 (t − t0 ) + 12 a (t − t0 )2 .
(8.4)
Observe-se que esse é o espaço percorrido com aceleração positiva; o resultado
é diferente se a aceleração é negativa. Vejamos.
8.1.4.4
Deslocamento
No movimento retilíneo uniformemente acelerado as equações paramétricas
da trajetória do ponto serão:
y = 0
y = 0
ou
x = v0 t + 1 at2
x = x0 + v0 (t − t0 ) + 1 a (t − t0 )2 ,
2
2
se fizermos o eixo dos x coincidir com a reta descrita. Desse modo, o deslocamento é
1
x − x0 = v0 (t − t0 ) + a (t − t0 )2 ,
2
expressão que coincide com a do espaço (8.4), calculada anteriormente.
Se a aceleração a é positiva, o espaço percorrido é igual ao módulo do
vetor deslocamento, 9 mas a aceleração é negativa, i.e., se a = ~a · ı̂ < 0, tal não
ocorre, como já tivemos ocasião de exemplificar. O vetor deslocamento sendo
dado por 10 :
y − y0 = 0
x − x0 = v0 (t − t0 ) − 1 α (t − t0 )2
2
e, lembrando que estamos usando aqui a notação v = |~v| ≥ 0 e α = |~a|
v = v0 − αt .
Façamos t0 = 0 e x0 = 0, o que não limita a generalidade do resultado, e, para
fixar idéias, v0 = 20 m/s e a = −10 m/s2 , portanto a expressão
x − x0 = v0 (t − t0 ) + 12 a (t − t0 )2 = v0 (t − t0 ) − 21 α (t − t0 )2
9
10
u
u
No caso do movimento retilíneo.
As projeções segundo os versores ı̂ e ̂, paralelos aos eixos dos x e dos y, respectiva-
mente.
“ADT-MF” — 2005/11/7 — 8:51 — page 319 — #319
319
8.1. Movimento de um ponto no plano
fica:
x(t) = (20 m/s) t − (5 m/s2 ) t2 ,
daí a projeção do vetor velocidade no eixo Ox é dada por
v(t) = (20 m/s) − (10 m/s2 ) t .
Tabela 8.1: Velocidades e deslocamentos correspondentes para o movimento x =
(20 m/s)t−(5 m/s2 )t2 , considerando-se t0 = 0 e x0 = 0.
t (s)
0
1
2
3
4
v (m/s)
20
10
0
-10
-20
x (m)
0
15
20
15
0
A Tab. 8.1 e o gráfico da Fig. 8.6 ilustram esse movimento durante o intervalo de tempo t ∈ (0 s,4 s); a Fig. 8.7 traduz a projeção do vetor velocidade no
eixo Ox. O deslocamento entre os instantes t0 = 0 s e t2 = 4 s é dado por:
y
6 (m)
t=2 s
t=1 s
t=3 s
t=4 s
•ª
2
•
4
6
8
•
10 12 14 16 18 20 22 24
-
x (m)
Figura 8.6: Posição em alguns instantes associados à trajetória: x(t) = (20 m/s) t −
(5 m/s2 ) t2 e y(t) = 0.
Z
x(t2 ) − x(t0 ) =
t2
v(t) dt = A + A0 = 0 .
t0
Onde A e A0 são numericamente iguais às áreas determinadas pela curva do
gráfico da função v(t) e o eixo dos tempos, sendo positiva a área A e negativa
a área A0 . Isto é, sendo t1 o instante em que a velocidade se anula, t1 = vα0 =
“ADT-MF” — 2005/11/7 — 8:51 — page 320 — #320
320
Capítulo 8. Movimento de um ponto
v
6 (m/s)
20
10
A+
t1
1
2
t2
3
4
-
t (s)
A0−
−10
−20
Figura 8.7: Gráfico da velocidade associada à trajetória: x(t) = (20 m/s) t−(5 m/s2 ) t2
para t ∈ (0 s, 4 s).
|~v| (m/s)
6
20
10
|A0 |
|A|
t1
1
2
t2
3
4
-
t (s)
Figura 8.8: Gráfico do módulo do vetor velocidade associada à trajetória: x(t) =
(20 m/s) t+(5 m/s2 ) t2 e y(t) = 0 para t ∈ (0 s,4 s).
“ADT-MF” — 2005/11/7 — 8:51 — page 321 — #321
321
8.2. Grandezas cinemáticas ligadas ao movimento circular
− va0 = 2 s, portanto, para t0 = 0 s, e t2 = 2t1 = 4 s, ver Fig. 8.7,
1
2 v0 t1
A=
=
v0
1 2
=
v
α
2α 0
1
2 v0
v0 (v0 − α t2 ) t2 −
α
1
1
1
= 2 (v0 − α t2 ) (α t2 − v0 ) = − (v0 − α t2 )2 ,
α
2α
1
(v0 − α t2 )2
|A0 | =
2α
A0 =
1
2
v(t2 ) (t2 − t1 ) =
1
2
daí
O espaço percorrido (ver Fig. 8.8)
Z
s(t2 ) − s0 =
t2
|v(t)| dt = |A| + |A0 | = 40 cm .
t0
O espaço percorrido entre o instante t0 e t > t0 pode ser calculado:
Z
s(t) − s0 =
t
|v(t)| dt
t0
Z t
{v0 − α t} dt
se t0 ≤ t ≤ t1 = vα0
0
Z t1
Z t
=
{v0 − α t} dt +
−{v0 − α t} dt se t > t1 = vα0
0
t1
2
1
se t0 ≤ t ≤ t1 = vα0
v0 t − 2 α t
2
=
h
it
v
12 0 − v0 t − 21 α t2 v0 se t > t1 = vα0
α
α
2
1
v t − 2 αt
se t0 ≤ t ≤ t1 = vα0
02
=
v0
v
+ 12 α t2 − v0 t se t > t1 = α0 .
α
8.2
Grandezas cinemáticas ligadas ao movimento
circular
Para o estudo do movimento circular acelerado convém definir outras grandezas diretamente ligadas ao movimento de rotação (no plano).
“ADT-MF” — 2005/11/7 — 8:51 — page 322 — #322
322
Capítulo 8. Movimento de um ponto
8.2.1
Velocidade angular
Consideremos um circunferência (de círculo) de raio R e centro O, e um sistema de eixos cartesianos Oxy com origem em O, veja Fig. 8.9. Se o ponto P
se move sobre a circunferência desse círculo, o raio OP varre a área do círculo
descrevendo, a partir de Ox, o ângulo θ = θ(t) em função do tempo. Assim,
para t = t0 , 11 o ângulo varrido será indicado por θ0 , e para t, θ. No intervalo de
tempo ∆t = t − t0 , o ângulo descrito é ∆θ = θ − θ0 , denominado deslocamento
angular ou incremento angular; nesse intervalo de tempo o ponto se desloca
sobre a circunferência, descrevendo o arco ∆s = s−s0 . Como já se viu, medindo
o ângulo em radiano se tem que
Figura 8.9: Parâmetros relevantes para definição da velocidade angular.
∆s = R ∆θ .
Dividindo ambos os membros por ∆t, obtém-se a celeridade média
cm =
∆s
∆θ
=R
.
∆t
∆t
A razão
∆θ
,
∆t
que é o ângulo descrito por unidade de tempo durante o intervalo de tempo ∆t,
denomina-se velocidade angular média, e o limite
ωm =
∆θ dθ
=
∆t→0 ∆t
dt
denomina-se velocidade angular instantânea.
ω = lim
11
u Neste caso, “instante t0 ”, não está significando aqui, necessariamente, “instante ini
cial” de observação do movimento.
“ADT-MF” — 2005/11/7 — 8:51 — page 323 — #323
8.2. Grandezas cinemáticas ligadas ao movimento circular
8.2.2
Aceleração angular
Suponhamos que no instante t0 a velocidade angular seja ω0 , e no instante t, ω.
A variação da velocidade angular no intervalo de tempo ∆t = t−t0 é ∆ω = ω−ω0 .
Denomina-se aceleração angular média, αm , a variação da velocidade angular
por unidade de tempo:
∆ω
,
αm =
∆t
e a aceleração angular instantânea no instante t a
α = lim
∆t→0
8.2.3
∆ω
ω(t + ∆t) − ω(t) dω
= lim
=
.
∆t→0
∆t
∆t
dt
Deslocamento angular
Para calcular o deslocamento angular correspondente a um dado intervalo de
tempo ∆t = t − t0 , podemos usar seja a velocidade angular média ωm , seja a
instantânea ω = ω(t), como se segue:
∆θ = ωm ∆t
θ − θ0 = ωm (t − t0 )
θ = θ0 + ωm (t − t0 ) ,
em que 12 ∆θ = θ − θ0 é o deslocamento angular durante o intervalo de tempo
∆t, e θ é a coordenada angular no instante t.
Quando se usa a velocidade angular instantânea se tem:
dθ = ω dt .
Integrando:
Z
Z
θ
t
dθ =
θ0
ω dt
t
Z 0t
θ − θ0 =
ω dt
Z t
θ = θ0 +
ω dt .
t0
t0
Essas expressões são análogas as do deslocamento linear.
12
u
Note-se que, nesse caso, não há necessidade de a velocidade angular ser constante.
323
“ADT-MF” — 2005/11/7 — 8:51 — page 324 — #324
324
Capítulo 8. Movimento de um ponto
Se o movimento angular é acelerado, teremos:
∆ω = αm ∆t
ω − ω0 = αm (t − t0 )
ω = ω0 + αm (t − t0 ) ,
ou
dω = αm dt
Z t
dω =
α dt
ω0
t0
Z t
ω − ω0 =
α dt
t0
Z t
ω = ω0 +
α dt .
Z
ω
t0
Se α = cte , caso do movimento circular uniformemente acelerado,
ω = ω0 + α (t − t0 )
e, correspondentemente,
θ = θ0 + ω0 (t − t0 ) +
1
α (t − t0 )2
2
como facilmente se obtém. 13
8.2.4
Relação entre aceleração tangencial e aceleração angular
Já vimos que
v = Rω
em que o primeiro membro é o módulo do vetor velocidade, deste modo, por
(7.3):
dω
d |~v|
=R
dt
dt
at = R α
at =
13
Compare com
x = x0 + v0 (t − t0 ) + 12 a (t − t0 )2
para o deslocamento linear.
“ADT-MF” — 2005/11/7 — 8:51 — page 325 — #325
8.2. Grandezas cinemáticas ligadas ao movimento circular
que nos dá a expressão entre a aceleração tangencial (em módulo) e a aceleração angular (também em módulo).
A aceleração normal (em módulo), como se viu em (7.5), é
an =
v2
,
R
mas v = R ω, logo
a n = R ω2 .
E a aceleração (total) ~a = ~at + ~an será:
~a = R α τ̂ + ω2 R n̂ .
8.2.5
Expressão vetorial da velocidade angular
Para facilitar a representação vetorial da velocidade angular, suporemos que o
movimento de rotação se processa em torno de um eixo Oz, perpendicular ao
plano do movimento. Veja Fig. 8.10.
,→
Figura 8.10: Representação de ∆θ associado à rotação de um ângulo ∆θ no plano
perpendicular ao eixo Z.
Como se viu na primeira parte do curso, podemos representar a rotação
∆θ pelo segmento de reta orientado ao longo do eixo e dirigido dos pés para
a cabeça do observador em pé sobre o plano, ao longo do eixo, e que vê a
rotação se processar da sua direita para a sua esquerda. Vimos (cf. pág. 136,
pág. 153 segs.) que as rotações finitas não eram consideradas vetores porque
sua
soma (composição) era comutativa, mas se a rotação fosse infinitesimal,
,→
dθ, então poderíamos considerá-la como uma grandeza vetorial, segue-se que
a velocidade angular:
,→
,→
,→
∆θ dθ
ω = lim
=
∆t→0 ∆t
dt
,→
325
“ADT-MF” — 2005/11/7 — 8:51 — page 326 — #326
326
Capítulo 8. Movimento de um ponto
é (pode ser considerada 14 ) uma grandeza vetorial.
Sua representação,→por um segmento de reta orientado é facilmente obtida
da representação de ∆θ. É pois um vetor dirigido ao longo do eixo de rotação,
seu módulo sendo |dθ/dt| e seu sentido sendo dos pés para a cabeça do observador que vê a rotação se processar da sua direita para a sua esquerda. (Veja
Fig. 3.16 e Fig. 3.27.)
A velocidade angular, sendo 15 uma grandeza vetorial, pode ser decomposta ao longo dos três eixos coordenados nas componentes ω x ı̂, ωy ̂ e ωz k̂,
correspondendo às projeções ω x , ωy e ωz , tendo-se:
,→
ω = ω x ı̂ + ωy ̂ + ωz k̂
em que cada termo (parcela) representa velocidades angulares em torno dos
eixos Ox, Oy, Oz,,→respectivamente. Veja Fig. 8.11, em que supomos uma velocidade angular ω, em torno do eixo w, inclinado em relação aos eixos do
sistema de coordenadas. Como estamos estudando os movimentos num plano
,→
Figura 8.11: Componentes ω x ı̂, ωy ̂ e ωz k̂ da velocidade angular ω na direção do
eixo w.
Oxy, os vetores velocidades angulares serão sempre ortogonais a esse plano,
portando as projeções ω x = ωy = 0, a rotação se reduzindo à componente ωz k̂
ortogonal ao plano do movimento.
14
u Mais precisamente, é um tensor anti-simétrico de segunda ordem (pág. 155), que con
traído com um vetor gera outro vetor com características de produto vetorial, quando envolve
vetores tridimensionais; mas esse aspecto transcende ao escopo deste curso, ficando aqui como
registro.
15
u Sendo considerada.
“ADT-MF” — 2005/11/7 — 8:51 — page 327 — #327
327
8.2. Grandezas cinemáticas ligadas ao movimento circular
8.2.6
Relação vetorial entre velocidade e velocidade angular
Já vimos
anteriormente quando estudamos o movimento circular que a relação
,→
entre ω e ~v sobre a circunferência descrita era:
,→
|~v| = R |ω| .
,→
convém entretanto colocar essa expressão sob a forma vetorial já que ω e ~v são
vetores. Suponhamos o eixo de rotação coincidente com o eixo Oz, a circunferência descrita no plano xy com centro na origem. Veja Fig. 8.12.
É fácil ver que se pode exprimir a velocidade ~v como o produto vetorial de
,→
~ raio vetor do ponto P que executa o movimento de rotação (circular)
ω por R,
em torno da origem O, i.e., (ver §4.4)
,→
~,
~v = ω ∧ R
,→
~ é ortogonal a ω,
e como R
|~v| = R ω .
Figura 8.12: Movimento circular de raio
~ centro na origem, sobre o plano xy.
|R|,
Figura 8.13: Ponto O0 como origem do
vetor posição ~r, sendo φ o ângulo entre ~r
,→
−−−→
~
e ω, note-se que OO0 +~r = R.
Se tivéssemos tomado outra origem O0 sobre o eixo de rotação Oz, veja
,→
Fig. 8.13, o raio vetor ~r, com origem em O0 e que faz um ângulo φ com ω,
localizando o ponto que gira em relação a O0 , teríamos ainda
,→
~v = ω ∧ ~r ,
pois v = ω r sen φ ,
“ADT-MF” — 2005/11/7 — 8:51 — page 328 — #328
328
Capítulo 8. Movimento de um ponto
mas
r sen φ = R ,
donde v = ω R .
~ =
Sendo a expressão cartesiana do produto vetorial C~ de dois vetores A
~ = Bx ı̂ + By ̂ + Bz k̂:
A x ı̂ + Ay ̂ + Az k̂ e B
̂ k̂ ı̂
~∧B
~ = A x Ay Az C~ = A
Bx By Bz No caso em que figuramos (Fig. 8.12 ou Fig. 8.13):
C~ = ~v = v x ı̂ + vy ̂ + vz k̂
~ ,→
A = ω = 0ı̂ + 0 ̂ + ω k̂
B
~=R
~ = xı̂ + y ̂ + 0 k̂,
temos:
ı̂ ̂ k̂ ,→
~ = 0 0 ω
~v = ω ∧ R
x y 0 0 ω
0 ω
0 0
=
ı̂ − ̂ + k̂
y 0 x 0 x y
= (−ω y) ı̂ + (ω x) ̂ .
8.2.6.1
Exemplo muito importante. Movimento harmônico simples
Um ponto descreve uma curva cujas equações paramétricas são
x = 0
y = A sen(ωt)
em que A e ω são constantes. Pede-se:
1. Qual o tipo de movimento do ponto?
2. A velocidade e a aceleração em função do tempo.
3. O gráfico dos deslocamentos, da velocidade e da aceleração (em função
do tempo).
“ADT-MF” — 2005/11/7 — 8:51 — page 329 — #329
329
8.2. Grandezas cinemáticas ligadas ao movimento circular
4. O gráfico dos espaços percorridos.
5. Compare os gráficos dos deslocamentos com o dos espaços percorridos.
6. Mostre como obter facilmente os gráficos a partir do movimento circular
uniforme (para esse movimento).
1o ) A abscissa x é sempre nula, só variando a ordenada y, logo o ponto se
desloca sobre o eixo Oy, o movimento é retilíneo. Por outro lado, a função
y = A sen(ωt) adquire o valor máximo +A, quando sen(ωt) = +1; e mínimo
−A, quando sen(ωt) = −1. O movimento se limita portanto ao segmento de reta
de comprimento 2A, e o ponto se desloca sobre ele num movimento de vai e
vem, a origem no centro do segmento descrito. Veja Fig. 8.14. O movimento é
acelerado com aceleração variável, como veremos. Na Fig. 8.14 representamos
o vetor ~y = y ̂, que tendo sempre a mesma direção pode ser tratado como uma
grandeza escalar, a projeção y.
Figura 8.14: Segmento de reta onde se apóia o movimento ~r(t) = 0ı̂+A sen(ωt) ̂.
2o ) Para achamos a velocidade e a aceleração basta achar a 1a e a 2a derivadas
do espaço:
y = A sen(ωt)
dy
= ωA cos(ωt)
v=
dt
dv
a=
= −ω2 A sen(ωt)
dt
(8.5a)
(8.5b)
(8.5c)
“ADT-MF” — 2005/11/7 — 8:51 — page 330 — #330
330
Capítulo 8. Movimento de um ponto
como y = A sen(ωt), substituindo na (8.5c), vem
d2 y
= −ω2 y
dt2
d2 y
+ ω2 y = 0
dt2
ou
(8.5d)
que é uma equação que encerra a função y e as derivadas de y, e que se denomina equação diferencial do movimento harmônico simples, mais tarde
teremos ocasião de estudá-la. O estudo do movimento harmônico simples é de
importância fundamental na Física, será desenvolvida na Dinâmica e Acústica.
3o ) Gráfico do deslocamento Trata-se de fazer o gráfico da função y =
A sen(ωt). Para tanto examinaremos a função f (t) = sen(ωt).
Essa função é periódica, isto é, ela repete os mesmos valores para valores
diferentes da variável independente, ou ainda, para
t = t0
e t = t0 = t0 +
2nπ
,
ω
sendo n ∈ Z um inteiro qualquer, e para t variando no intervalo (t0 , t0 ), ou
mesmo para t ∈ R. De fato,
sen(ω(t0 +
2nπ
ω ))
= sen(ωt0 + 2nπ) = sen(ωt0 )
para qualquer t ∈ (t0 , t0 + 2nπ
ω ).
O mesmo fato ocorre com vy = ẏ = ωA cos(ωt).
O menor intervalo de tempo (não-nulo), T , para que tanto sen(ωt) como
cos(ωt) adquiram (individualmente) o mesmo valor se denomina período do
movimento. Observe que neste caso o ponto passa a cada intervalo de tempo
T na mesma posição com a mesma velocidade e a mesma aceleração. Quando
isto acontece, diz-se que o movimento é periódico. 16
No caso do movimento harmônico simples, o menor intervalo de tempo
não-nulo para o movimento repetir-se identicamente é quando n = 1, e neste
caso,
∆T = T = t0 +
T=
2π
ω
2π
− t0
ω
16
u De modo mais geral, diz-se que uma função real z = λ(x) é periódica de período T se
λ(x + T ) = λ(x), ∀x ∈ D , onde D é o domínio da função, n ∈ Z e T é o menor valor não-nulo para
o qual essa propriedade é válida.
“ADT-MF” — 2005/11/7 — 8:51 — page 331 — #331
8.2. Grandezas cinemáticas ligadas ao movimento circular
ou
ω=
2π
.
T
O número de vezes que isto acontece por unidade de tempo denomina-se
freqüência do movimento, N, e se tem que
N=
1
.
T
A freqüência é o inverso do período.
O movimento cuja equação é y = A sen(ωt) chama-se movimento periódico
simples, movimento harmônico simples, movimento pendular ou movimento
vibratório simples. Essa abundância reflete a importância dos movimentos que
seguem a função y = A sen(ωt).
4o ) Para obtermos os gráficos é mais interessante mostrar como se obtém
uma simulação do movimento a partir do movimento circular uniforme e daí
tirar um processo geométrico para construir os gráficos.
Figura 8.15: Ponto Q executando um movimento circular uniforme, sobre circulo de
raio A e com velocidade angular ω.
Suponhamos que um ponto Q descreva um movimento circular uniforme
sobre uma circunferência de raio R = A. Veja Fig. 8.15, a velocidade angular
sobre a circunferência sendo igual a ω = 2π
T . Tomemos um sistema de eixos cartesianos ortogonais, com origem no centro do círculo, e projetemos o ponto Q
sobre o eixo Oy, obtemos o ponto P, cuja ordenada no instante t é y = A sen(ωt),
desde que o ângulo descrito por Q, para t = 0, seja igual a zero.
Essa circunferência se denomina circunferência representativa do movimento harmônico simples, e vê-se que o período T = 2π
ω , ωT = 2π, será o intervalo de tempo necessário para que o ponto Q descreva a circunferência toda,
331
“ADT-MF” — 2005/11/7 — 8:51 — page 332 — #332
332
Capítulo 8. Movimento de um ponto
dando uma volta completa, o raio R = A formando um ângulo igual a 360◦ ou
2π rad.
Enquanto o ponto Q descreve a circunferência com movimento circular
uniforme de velocidade angular ω, sua projeção percorre o segmento de comprimento 2A, com um deslocamento y = A sen(ωt).
Observe-se que o movimento harmônico simples consta de um movimento
de vai e vem sobre o segmento de reta, o ponto P passando num período T
duas vezes pela mesma posição, ora indo, ora vindo; assim ela sai de O, sobe
até a extremidade y = A; desce, passa por O, vai até o mínimo y = −A, e retorna
a O, enquanto Q parte de Q0 e percorre toda a circunferência, retornando a Q0 ,
sendo P a projeção de Q.
Gráfico da posição Para acharmos os pontos sobre a trajetória de P, basta
dividirmos a circunferência em partes iguais, por exemplo, 8 partes, cada parte
sendo percorrida no intervalo de tempo igual a 81 T . Torna-se pois muito simples fazer o gráfico de y = A sen(ωt), prolonga-se a linha perpendicular a y,
isto é, Ot e sobre ela registram-se os valores de t correspondentes a 81 T , 28 T ,
8
3
8 T . . . 8 T , como a função se repete após T , basta fazer o gráfico de 0 a T .
Veja Fig. 8.16. Para facilitar tiramos paralelas a Ot, passando pelos pontos cor-
Figura 8.16: Levantamento do gráfico da função y = A sen(ωt).
respondentes à divisão da circunferência. Essas paralelas dão as ordenadas y
correspondentes a divisões do tempo t, em frações do período.
Se desejarmos aumentar a precisão do traçado, podemos aumentar o número de divisões do período, dividindo, por exemplo, por 12 (6 × 2), o que
facilita a determinação dos pontos (por quê?). Ligando-se os pontos no plano,
de ordenadas y e correspondentes t = 1n T , obtém-se a curva de variação do
deslocamento y em função do tempo.
“ADT-MF” — 2005/11/7 — 8:51 — page 333 — #333
8.2. Grandezas cinemáticas ligadas ao movimento circular
Gráfico da velocidade O gráfico da velocidade é análogo ao da posição,
uma vez que sen(α− π2 ) = cos(α). Note-se que v = ωA cos(ωt) apresenta máximo
v = ωA para t = 0, pois cos 0 = 1. Veja o gráfico da Fig. 8.17. Observe que para
Figura 8.17: Levantamento do gráfico da velocidade v = ωA cos(ωt).
t = 14 T , a velocidade é nula, uma vez que cos(ω 14 T ) = 0, pois T = 2π
ω e assim
1 2π
π
1
) = cos = 0 .
cos(ω T ) = cos(ω
4
4 ω
2
A curva representativa se inicia pois no máximo (t, y) = (0, A); para t = T4 a
velocidade se anula, isto corresponde ao máximo do deslocamento, e quando
a velocidade é máxima o deslocamento é nulo, observe que
π
cos(ωt) = sen(ωt − φ) = sen(ωt − )
2
em que φ se denomina fase inicial (t = 0), em relação ao deslocamento; φ se
denomina diferença de fase ou defasagem. A velocidade apresenta assim uma
diferença de fase de π2 em relação ao deslocamento, ou se acha defasada de π2
em relação ao deslocamento. Já para a aceleração, que é a = −ω2 A sen(ωt), a
diferença de fase em relação ao deslocamento é φ = π. 17
5o ) Vetor deslocamento e espaço percorrido Na Fig. 8.18, fizemos a reprodução dos dois gráficos, um sobre o outro, para destacar aquilo que asseveramos sobre o vetor deslocamento e espaço percorrido. O espaço percorrido,
como vimos, será dado por
Z t
s − s0 =
|~v| dt
0
17
u
Note-se que essa é uma forma compacta de exprimir φ = π rad.
333
“ADT-MF” — 2005/11/7 — 8:51 — page 334 — #334
334
Capítulo 8. Movimento de um ponto
Figura 8.18: Ilustração comparativa entre os gráficos da posição e da velocidade de
um MHS de amplitude A e período T = 2π
ω.
enquanto que o deslocamento:
Z
~r − ~r0 =
t
~v dt .
0
Dividamos a trajetória em 4 partes, cada uma correspondente a 14 T , isto
é, correspondentes a t ∈ [0, 14 T ), t ∈ [ 41 T, 24 T ), t ∈ [ 24 T, 34 T ), t ∈ [ 34 T, T ]. Na
Fig. 8.18 representamos o deslocamento sobre a circunferência representativa
C1 , e a velocidade sobre C2 , no gráfico a curva da ordenada menor é a do
deslocamento e a de ordenada maior a da velocidade.
Agora temos:
Z T
Z T
n
o
4
4
T
T
~v dt =
~r( 4 ) − ~r0 = y( 4 ) − y0 ̂ =
ωA
cos(ωt)
dt
̂
0
0
correspondente a área hachurada entre t ∈ [0, T4 ] e a curva representativa da
função v = ωA cos(ωt), esta área corresponde ao deslocamento de 0 a T4 , que é
igual a A.
n
o
~r( T2 ) − ~r0 = y( T2 ) − y0 ̂
Z T
Z T
2
2
~v dt =
=
ωA
cos(ωt)
dt
̂
0
0
(
T )
n
o
2
̂ = A sen(ω T2 ) − A sen(0) ̂
= A sen(ωt)
0
(
)
1 2π
= A sen(ω
) ̂ = {A sen(π)} ̂ = 0 ̂ ,
2 ω
“ADT-MF” — 2005/11/7 — 8:51 — page 335 — #335
335
8.2. Grandezas cinemáticas ligadas ao movimento circular
O resultado nulo corresponde ao deslocamento nulo pois y = A sen(ωt) e, para
t = T2 , o ponto voltou à origem O. Na figura, a área hachurada corresponde a
esse deslocamento nulo, de fato, a área de 0 a T4 é positiva, mas a área de T4 a T2
é negativa, mas de mesmo valor numérico, e assim a soma é nula. Com efeito,
calculemos a área de T4 a T2 :
Z
y( T2 )
−
y( T4 )
=
T
2
T
4
ωA cos(ωt) dt
T
2
= A sen(ωt) T = A sen(ω T2 ) − A sen(ω T4 )
4
1 2π
= A sen(ω 12 2π
ω ) − A sen(ω 4 ω )
= A sen(π) − A sen( π2 ) = 0 − A
= −A ,
exatamente igual ao deslocamento máximo.
Para calcularmos o espaço percorrido teríamos que calcular
Z
s − s0 =
T
2
Z
T
4
|~v| dt =
0
como cos(ωt) troca de sinal de
trechos: de 0 a T4 e de T4 a T2 :
s − s0 =
Z
T
2
0
T
4
a
T
2,
temos que dividir a trajetória em dois
Z
ωA cos(ωt) dt +
0
Z
=
T
4
0
ωA cos(ωt) dt
Z
ωA cos(ωt) dt −
T
4
T
2
T
4
T
2
ωA cos(ωt) dt
ωA cos(ωt) dt
h
iT h
iT
= A sen(ωt) 4 − A sen(ωt) T2
0
4
i
h
h
π i
π
= A sen( ) − 0 − A sen(π) − sen( )
2
2
= A(1 − 0) − A(0 − 1)
= 2A .
Interpretação análoga pode ser feita para o restante do movimento ao longo de
“ADT-MF” — 2005/11/7 — 8:51 — page 336 — #336
336
Capítulo 8. Movimento de um ponto
um período:
Z
T
y(T ) − y(0) =
v dt = 0
0
Z
s(T ) − s(0) =
T
|v| dt = 4A .
0
Vejamos agora o gráfico de |~v| = |v ̂| = |ωA cos(ωt)|, isto é, do módulo do vetor
Figura 8.19: Gráficos das funções v = ωA cos(ωt) e |~v |.
velocidade ~v, ou seja, |v| = ωA| cos(ωt)|, o gráfico de |v| difere do de v por não
possuir a parte negativa do gráfico de v, a qual é substituída por uma parte
simétrica positiva. A Fig. 8.19 mostra os dois gráficos, de v e de |v|.
6o ) Este item já está desenvolvido na pág. 331.
Problema Um ponto ao passar pela posição P0 (x0 , y0 ) tem velocidade ~v0 =
(v0 , 0) e aceleração ~a = (a0 , 0). Supondo a aceleração constante, x0 = 3 cm,
y0 = 0, v0 = 15 cm/s e a0 = −3 cm/s2 , pede-se:
1. A expressão do vetor velocidade para qualquer instante.
2. A expressão do vetor deslocamento para qualquer instante.
3. A expressão da celeridade para qualquer instante.
4. A equação paramétrica da trajetória de P.
5. O cálculo do deslocamento e do espaço percorrido entre t = 0 e t = 10 s,
e a verificação pelos gráficos das velocidades.
6. O gráfico de v x , de vy e de |~v|.
“ADT-MF” — 2005/11/7 — 8:51 — page 337 — #337
337
8.3. Mudança de sistema de referência
Respostas
1. v = v0 + at = 15 − 3t.
2. x − x0 = v0 t + 12 at2 .
3. c = |v0 − at|.
4. x = x0 + v0 t + 12 at2 = 3 + 15t − 1,5t2 .
5. x10 − x0 = 0; s10 − s0 = 75 cm.
8.3
Mudança de sistema de referência
Suponhamos dois sistemas de referência cartesianos ortogonais, um deles S Oxy
será um sistema inercial e como tal é freqüentemente chamado sistema abso0
luto; o outro S O
0 ξη se move de um modo qualquer em relação ao primeiro. Veja
Fig. 8.20, os versores dos eixos Ox e Oy serão indicados por ı̂ e ̂, como usualmente, mas, para maior clareza, vamos indicar os eixos de S 0 por O0 ξ e O0 η,
0
e seus versores por ı̂ξ e ̂η , respectivamente. O sistema S O
0 ξη se move de um
modo qualquer em relação ao sistema inercial S Oxy .
Figura 8.20: Sistema de referência S Oxy e S O0 0 ξη .
Suponhamos que um ponto P se move passando no instante t0 pela posição
0
P0 , que suporemos ligada rigidamente ao sistema S O
0 ξη .
Neste caso a posição do ponto P será, no instante t0 , dada pelos raios vetores ~r no sistema S e ~r 0 no sistema S 0 , se ~r0 é o raio vetor da origem O0 de S 0 ,
veja Fig. 8.20, teremos,
~r = ~r0 + ~r 0 .
(8.6)
“ADT-MF” — 2005/11/7 — 8:51 — page 338 — #338
338
Capítulo 8. Movimento de um ponto
Para destacar o papel do sistema de referência S 0 vamos escrever esses
vetores cartesianamente:
~r = xı̂ + y ̂
~r0 = x0 ı̂ + y0 ̂
~r 0 = ξ ı̂ξ + η ̂ ,
0
0 η
em que x, y e x0 , y0 são respectivamente as coordenadas de P e de O0 no sistema
absoluto e ξ0 , η0 as coordenadas de P no sistema S 0 .
A igualdade (8.6) se torna então:
xı̂ + y ̂ = x0 ı̂ + y0 ̂ + ξ0 ı̂ξ + η0 ̂η ,
(8.7)
essa igualdade continua sendo uma igualdade vetorial. Para acharmos o vetor
velocidade basta derivar (8.7), obtemos:
dx
dy
ı̂ +
̂ =
dt
dt
!
!
d ̂η
dı̂ξ
dy0
dη0
dξ0
dx0
ı̂ +
̂ +
ı̂ +
̂ + ξ0
+ η0
.
=
dt
dt
dt ξ dt η
dt
dt
(8.8)
Observe-se que ı̂ e ̂ do sistema S são fixos no tempo, de modo que as
0
suas derivadas são nulas, entretanto, como o sistema S O
0 ηξ se move de modo
qualquer, os versores desse sistema variam de direção e, apesar dos seus módulos permanecerem constantes, eles variam no tempo, sendo assim função do
tempo, suas derivadas não sendo de um modo geral nulas. Reagrupemos os
termos de (8.8):
dx
dy
ı̂ +
̂ =
dt
dt
! "
!
!#
d ̂η
dı̂ξ
dx0
dy0
dξ0
dη0
=
ı̂ +
̂ + ξ0
+ η0
+
ı̂ +
̂ .
dt
dt
dt
dt
dt ξ dt η
(8.9)
O primeiro membro de (8.9) não é mais que a velocidade do ponto P no
sistema absoluto, que indicaremos por
~vab =
dx
dy
ı̂ +
̂ ,
dt
dt
v0 =
dy
dx0
ı̂ + 0 ̂
dt
dt
e
“ADT-MF” — 2005/11/7 — 8:51 — page 339 — #339
339
8.3. Mudança de sistema de referência
é a velocidade absoluta da origem O0 de S 0 , o que significa a velocidade de
translação de S 0 em relação a S .
O termo
dξ
dη
vrel = 0 ı̂ξ + 0 ̂η
dt
dt
é a velocidade do ponto P no sistema S 0 e se denomina velocidade relativa de
P em relação ao sistema S 0 .
Vejamos agora o termo
ξ0
d ̂η
dı̂ξ
+ η0
,
dt
dt
como se vê é um termo referente ao movimento de rotação do sistema S 0 , e,
de fato, constitui uma rotação instantânea em torno de um eixo O0 Z ortogonal
ao plano O0 ηξ formando uma terna dextrorsa com O0 ξ e O0 η, e passando pela
origem O0 . Demonstraremos tal fato mais adiante. Sendo assim, o termo
~vtran = ~v0 + ξ0
d ̂η
dı̂ξ
+ η0
dt
dt
(8.10)
diz respeito unicamente ao referencial relativo S 0 e se denomina velocidade de
transporte ou velocidade de arrastamento.
Observe-se que essa velocidade de transporte é a velocidade do ponto P0
no instante t0 , instante em que o ponto P passa por ele, é pois a velocidade
com que esse ponto P0 está sendo transportado, ou arrastado pelo sistema de
referência O0 ξ e O0 η, por isso se diz que o ponto P, cuja posição coincide
com P0 no instante t0 , tem uma velocidade de transporte ou velocidade de
arrastamento igual a essa velocidade de P0 , ponto que está rigidamente ligado
ao sistema S 0 . Desse modo:
~vab = ~vtran + ~vrel .
Observe-se ainda que o ponto P0 , estando ligado rigidamente ao sistema
0
de referência S 0 , tem velocidade relativa nula, suas coordenadas em S O
0 ηξ não
variam e, portanto, a velocidade do ponto P0 é igual a sua velocidade de transporte:
~vabP0 = ~vtranP0 .
Podemos então dizer que a velocidade absoluta, em um dado instante t,
de um ponto P que se move em qualquer dos dois sistemas é igual a soma da
sua velocidade relativa ~vrel em relação ao sistema S 0 , mais a sua velocidade de
“ADT-MF” — 2005/11/7 — 8:51 — page 340 — #340
340
Capítulo 8. Movimento de um ponto
transporte ~vtran , essa velocidade de transporte ou de arrastamento sendo igual
à velocidade absoluta do ponto Pt rigidamente ligado ao sistema S 0 por onde
o ponto P passa no instante t. Essa velocidade de transporte, se o sistema S 0
executa um movimento qualquer, varia pois ao longo da trajetória de P no
0
referencial S O
0 ηξ .
Vejamos alguns exemplos.
Exemplos
1o ) Suponhamos que o sistema S 0 execute um movimento de translação com
velocidade constante ~v0 paralela ao eixo Ox, e simultaneamente execute um
movimento de rotação em torno de um eixo ortogonal ao plano O0 , η, ξ e que
passa por O0 . Veja Fig. 8.21.
Figura 8.21: Sistema de referência S O0 0 ξη com velocidade de translação ~v0 e movimento de rotação em torno de O0 .
A velocidade de arrastamento de um ponto P no instante t1 e no instante t2
passa pelas posições P1 e P2 , respectivamente, serão constituídas pelas somas
de ~v0 mais as velocidades ~v1 e ~v2 de módulos v1 = r1 ω e v2 = r2 ω, em que ~r1 e
~r2 são os raios vetores dos pontos P1 e P2 no sistema móvel. Observe-se que
neste exemplo ~v2 = −~v0 , assim P2 ficou instantâneamente parado.
2o ) Suponhamos que um trem percorra uma linha reta horizontal com velocidade ~v constante, relativamente a um sistema ligado a terra, e um passageiro
dentro do trem se desloque com velocidade ~v 0 na mesma direção e sentido num
sistema ligado ao trem (Fig. 8.22). Qual a sua velocidade absoluta? Qual a de
transporte e a relativa, se o sistema inercial é o ligado à terra, e o relativo ao
“ADT-MF” — 2005/11/7 — 8:51 — page 341 — #341
341
8.3. Mudança de sistema de referência
Figura 8.22: Trem a se mover com velocidade ~v em relação ao sistema de referência S Oxy .
trem? Sua velocidade de transporte é a velocidade do trem, e a relativa é ~v 0 , de
modo que ~vab =~v +~v 0 .
Observe-se que a velocidade de transporte é a mesma para todos os pontos
do trem.
8.3.1
Relação entre a velocidade de transporte e as velocidades de
translação e de rotação
Vamos mostrar agora que a velocidade de transporte ~vtrans,→consta de uma velocidade de translação ~v0 e de uma velocidade de rotação ω em torno de O0 , no
caso em que todos os pontos do sistema móvel se desloquem como se estivessem rigidamente ligados entre si e ao sistema. De fato, neste caso, tínhamos
em (8.10):
d ̂η
dı̂ξ
~vtrans = ~v0 + ξ
+η
dt
dt
em que ~v0 é a velocidade de translação instantânea da origem do sistema móvel
,→
e o restante é a velocidade angular instantânea ω em torno do eixo normal ao
plano dos eixos O0 ξ e O0 η, e que passa por O0 .
De fato, as derivadas que figuram nessa igualdade são as derivadas de vetores de módulo constante e iguais a 1, por conseguinte os vetores derivados são
~ de módulo
ortogonais aos vetores de que derivam; de fato, dado o vetor 18 A
~ para demonstrar tal fato, basta derivar
constante, sua derivada é ortogonal a A;
~ por A;
~ que não é mais que o quadrado do módulo de A:
~
o produto escalar de A
~·A
~ = |A|
~ |A|
~ = |A|
~2
A
~
~
d ~ ~ d A
~+A
~ · dA ,
A·A =
·A
dt
dt
dt
18
u
~ é uma função vetorial de módulo constante do parâmetro t.
Note-se que A
“ADT-MF” — 2005/11/7 — 8:51 — page 342 — #342
342
Capítulo 8. Movimento de um ponto
~ é constante, indenpendendo de t, então
e, visto que |A|
~·
0 = 2A
~
dA
.
dt
~ 2 . Deste modo
A derivada é nula, pois é igual a derivada de uma constante, |A|
~
~ · dA = 0 .
A
dt
~ e dA/dt
~
Ora, se A
têm produto escalar nulo, segue-se que eles são orto~
~ de módulo
gonais, isto é, o vetor derivado dA/dt
de uma função vetorial A
~
constante é sempre ortogonal a A.
Figura 8.23: Ilustração para a derivada temporal de ı̂ξ .
Vejamos agora o caso em que se trata da derivada de um vetor de módulo
unitário. Veja Fig. 8.23, a variação ∆ı̂ξ do versor ı̂ξ é devida a uma variação de
sua direção, portanto proveniente de uma rotação de um ângulo ∆θ em torno
da origem O0 , ocorrida no intervalo de tempo ∆t. Temos então:
(
)
∆ı̂ξ
|∆ı̂ξ |
∆ı̂ξ
lim
= lim
×
∆t→0 ∆t
∆t→0
∆t
|∆ı̂ξ |
|∆ı̂ξ |
∆ı̂ξ
= lim
lim
.
∆t→0 ∆t
∆t→0 |∆ı̂ξ |
É claro que
lim
∆t→0
∆ı̂ξ
= ̂η ,
|∆ı̂ξ |
que é o versor normal a ı̂ξ , e de mesmo sentido que o versor limite.
Por outro lado, se ∆w é o arco que a corda |∆ı̂ξ | subentende, então se tem que
|ı̂ξ | ∆θ = ∆w , mas |ı̂ξ | = 1
“ADT-MF” — 2005/11/7 — 8:51 — page 343 — #343
343
8.3. Mudança de sistema de referência
e assim:
|∆ı̂ξ |
|∆ı̂ξ | ∆w
|∆ı̂ξ | ∆θ
=
=
∆t
∆w ∆t
∆w ∆t
portanto:
lim
∆t→0
|∆ı̂ξ |
|∆ı̂ξ |
∆θ
= lim
lim
=ω
∆t→0 ∆w ∆t→0 ∆t
∆t
uma vez que
|∆ı̂ξ |
=1
∆t→0 ∆w
pois é o limite da razão entre a corda e o arco correspondente, e
lim
∆θ
=ω
∆t→0 ∆t
lim
é velocidade angular com que o versor ı̂ξ gira no plano. Segue-se que
d
ı̂ = ω ̂η .
dt ξ
Analogamente
d
̂ = −ω ı̂ξ ,
dt η
os dois versores giram do mesmo ângulo, dando a mesma velocidade angular,
mas o versor do vetor derivado é ortogonal a ̂η , mas de sentido contrário, veja
Fig. 8.24. Portanto a velocidade de translação é
Figura 8.24: Ilustração para a derivada temporal de ̂η .
~vtrans = ~v0 + ξ0 ω ̂η − η0 ω ı̂ξ
e a (componente da) velocidade devida à rotação terá projeções
vξ = η0 ω
e
v η = ξ0 ω .
“ADT-MF” — 2005/11/7 — 8:51 — page 344 — #344
344
Capítulo 8. Movimento de um ponto
A velocidade provocada pela rotação é portanto:
~v = (−η0 ω) ı̂η + (ξ0 ω) ̂η ,
expressão análoga à expressão ~v = (−ωy)ı̂+(ωx) ̂ já encontrada no estudo da
expressão vetorial da velocidade tangencial no movimento de rotação de um
~ sendo ω
~ ∧R,
~ normal
ponto em torno da origem com velocidade angular ω: ~v = ω
~
ao plano xy, e R = xı̂+y ̂.
8.4
Aceleração absoluta, de transporte, relativa
e aceleração de Coriolis
Para obtermos a aceleração do ponto P que se move em um sistema S 0 (O0 , ξ, η)
móvel em relação a um sistema inercial ou absoluto, basta derivarmos a sua
velocidade, tínhamos:
~vab = ~vtrans + ~vrel
ou
~vab
!
!
d ̂η
dı̂ξ
dξo
dηo
= ~vo + ξo
+ ηo
+
ı̂ +
̂
dt
dt
dt ξ dt η
Derivando membro a membro obtemos a aceleração absoluta:
"
#
d~vo
d2 ̂η dξo dı̂ξ dηo d ̂η
d2 ı̂ξ
~aab =
+ ξo 2 + ηo 2 +
+
+
dt
dt dt
dt dt
dt
dt
|
{z
}
|
{z
}
2
1
"
# " 2
#
dξo dı̂ξ dηo d ̂η
d ξo
d2 ηo
+
+
+ 2 ı̂ξ + 2 ̂η .
dt dt
dt dt
dt
d t
|
{z
} |
{z
}
3
4
1 entre colchetes diz respeito à aceleração,
Observe-se que a expressão da origem O0 e à aceleração provocada pelo movimento de rotação da
origem: as derivadas de 2a ordem de ı̂ e ̂, dando as acelerações devido à
rotação do sistema e à possível variação da velocidade angular; a expressão
1 será assim a aceleração impressa pelo sistema móvel, por conseguinte, é a
aceleração de transporte ou aceleração de arrastamento ~atrans :
d~vo
dt ,
~atrans =
d2 ̂η
d2 ı̂ξ
d~vo
+ ξo 2 + ηo 2 .
dt
dt
dt
“ADT-MF” — 2005/11/7 — 8:51 — page 345 — #345
8.4. Aceleração absoluta, de transporte, relativa e de Coriolis
4 é obtida da derivada da velocidade relativa do ponto, por
A expressão conseguinte, trata-se da aceleração relativa 19
d2 ξo
d2 ηo
ı̂
+
̂ .
ξ
dt2
d2 t η
2 e
3 são iguais e cuja soma corresObserve-se agora que as expressões ponde a uma aceleração denominada aceleração de Coriolis, ~aCor :
#
"
dξo dı̂ξ dηo d ̂η
~aCor = 2
+
.
(8.11)
dt dt
dt dt
~arel =
dηo
o
Observe-se em (8.11) que dξ
dt e dt são as componentes (projeções) da
velocidade relativa do ponto, e as outras derivadas são:
dı̂ξ
= +ω ̂η
dt
e
d ̂η
dt
= −ωı̂ξ ,
a expressão dentro de colchetes em (8.11) não sendo mais do que a expressão
do produto vetorial da velocidade relativa do ponto P pela velocidade angular
instantânea do sistema, isto é,
~aCor = 2 ω
~ ∧ ~vrel .
De fato,
ω
~ ∧ ~vrel
̂η k̂χ ı̂ξ
0 ω = 0
dξo dηo
0
dt
dt
dξ dη o
o
ω ı̂ξ +
ω ̂η .
= −
dt
dt
Resumindo o que foi dito:
~aab = ~atrans + ~arel + ~aCor ,
sendo a aceleração de Coriolis expressa por:
~aCor = 2 ω
~ ∧ ~vrel .
19
u Trata-se da aceleração do ponto P medida pelo observador fixo em O0 no sistema
móvel S 0 (O0 , ξ, η).
345
“ADT-MF” — 2005/11/7 — 8:51 — page 346 — #346
346
Capítulo 8. Movimento de um ponto
Exemplos
1o exemplo) Suponhamos um trem movendo-se sobre trilhos horizontais e
retilíneos com velocidade ~vo constante em relação a um referencial ligado a
terra e um homem deslocando-se com velocidade de ~v, em ângulo de 45◦ com
a direção longitudinal do vagão, e em relação a um referencial S 0 ligado ao
trem, veja Fig. 8.25. Neste caso, todos os pontos do sistema móvel S 0 (trem)
Figura 8.25: Trem movendo-se com velocidade ~vo constante em relação a
um referencial ligado a terra e um homem deslocando-se com velocidade de
~v, em ângulo de 45◦ , e em relação ao trem.
se movem com velocidade ~vo , portanto em qualquer posição em que o homem
esteja a suma velocidade de transporte, ou de arrastamento, é sempre a mesma
e igual a ~vo . Sendo ~v a sua velocidade em relação ao vagão, velocidade relativa,
a sua velocidade em relação ao referencial ligado à terra, referencial “inercial”,
ou absoluto será ~vab =~vo +~v.
Aceleração
Como a velocidade ~vo e constante, bem como a velocidade
relativa ~vo , então as acelerações são todas nulas.
2o exemplo) Suponhamos que o trem se acelere com aceleração ~a constante,
essa aceleração sendo calculada em relação à terra (absoluta). Neste caso, a
aceleração é a mesma para todos os pontos do chão do trem, e o homem terá
em qualquer ponto a mesma aceleração de transporte ~atrans =~a, sua aceleração
relativa sendo nula, bem como a de Coriolis. Por conseguinte sua aceleração
absoluta é ~aab =~atrans =~a.
3o exemplo) Suponhamos uma plataforma circular horizontal de raio R, girante em torno de um eixo ortogonal ao seu plano e que passa pelo seu centro.
A velocidade de rotação sendo ω, constante. Veja Fig. 8.26.
“ADT-MF” — 2005/11/7 — 8:51 — page 347 — #347
8.4. Aceleração absoluta, de transporte, relativa e de Coriolis
Figura 8.26: Plataforma circular de
raio R girando com velocidade angular
ω.
Suponhamos um sistema de eixos Oxy ligados à terra, no plano horizontal;
em relação a esse sistema “inercial”, o centro O0 da plataforma está parado.
Seja O0 x0 y0 um sistema de eixos, cartesianos ortogonais, ligado à plataforma;
esses eixos giram com a plataforma com velocidade angular ω em torno da
origem O0 .
Seja agora um ponto P0 , à distância r do centro O0 da plataforma; sua velocidade tangencial devido a rotação é igual v = rω. A velocidade de transporte
de um homem que passa por P0 no instante t será ~v; se ele tem uma velocidade
relativa constante ~v 0 , caminhando radialmente para fora, então sua velocidade
absoluta é
~vab = ~v + ~v 0 .
Aceleração A aceleração de transporte é a aceleração do ponto P0 . Como o
movimento de rotação é uniforme, com velocidade angular ω constante, então
não há aceleração tangencial, somente aceleração normal
an =
v2
= vω = ω2 r .
r
A aceleração relativa é nula porque, por hipótese, ele caminha radialmente
com velocidade ~v 0 constante.
A aceleração de Coriolis é porém igual a ~aCor = 2~
ω ∧~v 0 , sendo ortogonal
~ e a ~v 0 , isto é, no plano da plataforma e tangencial à trajetória de P0 , na
aω
direção e sentido de ~v. Deste modo a aceleração absoluta é:
~aab = ~an + ~aCor
= ω2 r n̂ + 2ωv0 τ̂ .
347
“ADT-MF” — 2005/11/7 — 8:51 — page 348 — #348
348
Capítulo 8. Movimento de um ponto
Figura 8.27: Plataforma circular de raio
R girando com velocidade angular ω.
Vamos deduzir a expressão da aceleração de Coriolis para o presente caso
de um modo mais direto. Suponhamos que no instante t o ponto esteja na
posição P1 , sua velocidade de transporte sendo ~vt1 , e que no instante t2 ele
se tenha deslocado para o ponto P2 , sua velocidade relativa tendo o mesmo
valor de ~v 0 , o ponto no sistema móvel se deslocou radialmente. Ora, se sua
velocidade relativa continua de módulo constante v0 , a direção porém varia
de um ângulo ∆θ, que é o ângulo de que gira o sistema móvel no intervalo de
tempo ∆t = t2−t1 , com velocidade angular ω. Segue-se que haverá uma variação
de v0 : ∆v0 = v0 ∆θ, veja Fig. 8.27, e cuja direção é, a menos de infinitésimos de
2a ordem, ortogonal a ~v 0 , e de sentido igual ao movimento tangencial formado
pelo movimento de rotação. Por outro lado, a velocidade de transporte variará
não só em direção mas também em módulo.
De fato, variou de direção de um ângulo ∆θ e variou de módulo, passando
de vt1 = ωR1 para vt2 = ωR2 = ω (R1 +∆θ) = ωR1 + ω∆θ, isto é, de ∆vt = ω∆R,
∆R sendo o percurso do ponto ao longo do raio no intervalo de tempo ∆t.
Como já se viu no movimento curvilíneo, essas duas variações da velocidade
de transporte vão fornecer uma aceleração normal an devida à variação da
direção do vetor velocidade e outra at tangencial devida à variação de módulo,
sendo assim, a componente tangencial à trajetória se deve ao fato de que o
ponto se deslocou radialmente de ∆R com velocidade v0 no intervalo de tempo
∆t, logo ∆T = v0 ∆t e por conseguinte
∆vt = ω∆R = ωv0 ∆t .
Resumindo:
“ADT-MF” — 2005/11/7 — 8:51 — page 349 — #349
8.4. Aceleração absoluta, de transporte, relativa e de Coriolis
a) Em virtude do movimento relativo do ponto, sua velocidade, ao deslocar-se radialmente, introduz uma aceleração tangencial à trajetória do mo~ , essa aceleração
vimento do sistema móvel, e portanto ortogonal a ~v 0 e a ω
devendo-se ao fato de que pelo movimento de rotação com velocidade angular
ω
~ , ~v 0 varia em direção.
b) Pelo movimento ao longo do raio com velocidade v0 , a velocidade de
transporte varia em módulo e direção, a 1a variação sendo igual a ∆vt = ωv∆t,
e tangente à trajetória do movimento do sistema móvel.
c) Uma aceleração normal devido ao movimento de rotação do sistema e
igual a v2t /R1 , no ponto P1 .
As duas primeiras variações teem a mesma direção e sentido contrário,
logo:
∆vc = ∆v0 + ∆vt
= v0 ∆θ + ωv0 ∆t
e portanto, dividindo pelo intervalo de tempo durante o qual se verificou essa
variação, tem-se, tomando o limite quando ∆t → 0:
dθ
+ ωv0
dt
= v0 ω + ωv0
ac = v0
= 2ωv0
~ e ~v 0 são ortogonais.
que é a aceleração de Coriolis, no caso em que ω
A aceleração absoluta será pois:
~aab = ~an + 2~
ω ∧ ~v 0 ,
uma vez que o movimento relativo não é acelerado, isto é, relativamente ao referencial móvel o ponto deslocando-se radialmente com velocidade constante
não tem aceleração nesse sistema 20 .
4o exemplo) Suponhamos agora que o homem caminhe tangencialmente à
circunferência na direção e sentido do movimento, veja Fig. 8.28, com velocidade ~v de módulo constante v; neste caso a aceleração de Coriolis, sendo
20
u
Por outras palavras, tem aceleração nula nesse sistema.
349
“ADT-MF” — 2005/11/7 — 8:51 — page 350 — #350
350
Capítulo 8. Movimento de um ponto
Figura 8.28: Homem em P0 caminha
tangencialmente ao circulo na direção
e sentido do movimento com velocidade ~v de módulo constante v.
~ , terá a direção do raio OP0 e o sentido pe para dentro da
ortogonal a ~v e a ω
trajetória, sendo ac = vω2 , e a aceleração absoluta será:
~aab = ~an + ~ac + ~arel .
Em que ~an é a aceleração normal, de módulo ω2 r, devido ao movimento do
sistema móvel, ~ac é a aceleração de Coriolis, e ~arel é a aceleração relativa devido a variação da direção da velocidade relativa no sistema móvel, e portanto
tem a mesma direção e o mesmo sentido que ~an . Segue-se que as três acelerações têm a mesma direção e o mesmo sentido. Se a velocidade do homem
é, por hipótese, igual a velocidade de arrastamento de módulo v = rω, então:
arel = rω2 ; a aceleração de Coriolis ac = 2vω = 2rω2 ; e an = rω2 , logo
aab = ω2 r + ω2 r + 2ω2 r
= 4ω2 r .
5o exemplo) Suponhamos agora que o homem caminhe ou corra em sentido
contrário ao movimento anterior, mas sempre tangencialmente à circunferência
descrita pelo raio OP0 no movimento de rotação, e que sua velocidade relativa
~v 0 seja constante em módulo, veja Fig. 8.29. A velocidade absoluta do ponto
sendo ~vab = ~vt + ~v 0 .
Aceleração Temos:
~aab = ~atrans + ~arel + ~ac .
A aceleração de transporte é simplesmente a aceleração normal an = ω2 R; a
aceleração relativa também o é, seu sentido sendo para o ponto O, o centro de
curvatura do movimento; a aceleração de Coriolis porém tem sentido contrário,
“ADT-MF” — 2005/11/7 — 8:51 — page 351 — #351
8.4. Aceleração absoluta, de transporte, relativa e de Coriolis
Figura 8.29: Homem corre em sentido contrário ao movimento da Fig. 8.28.
a direção sendo a mesma. Os três vetores terão a mesma direção e podem ser
tratados como grandezas algébricas 21 :
aab = atrans + arel + ac
= ω2 R +
v0 2
− 2ωv ,
R
em que se tomou como sentido positivo o sentido para dentro da trajetória.
Façamos agora v0 = −vtrans , isto é,
~vab = ~v 0 + ~vt = ~0
vab = v0 − vt = 0 ,
neste caso v0 = −vt = ωR e a equação da aceleração absoluta se torna:
aab = ω2 R + ω2 R − 2ωωR
= 2ω2 R − 2ω2 R
=0.
Como é óbvio, pois no sistema inercial ou absoluto o ponto está parado. Um
observador ligado ao sistema inercial verá o homem correndo sobre a plataforma girante, mas sem sair da mesma posição relativamente a ele, observador.
21
u
Por meio de suas projeções nessa direção orientada.
351
“ADT-MF” — 2005/11/7 — 8:51 — page 352 — #352
352
Capítulo 8. Movimento de um ponto
Problemas
Problema 8.1. Um ponto descreve uma trajetória cujas equações paramétricas são: 22
x = 3,0 t
y = 8,0 t − 0,8 t2
Pede-se:
1. fazer o gráfico do movimento;
2. calcular a velocidade para t = 0 e representá-la no gráfico;
3. calcular a velocidade para o ponto máximo da trajetória (em que y é
máximo) e representá-la no gráfico;
4. calcular a aceleração instantânea (para t qualquer) e para t = 0, qual a
conclusão?
5. Conhece algum lugar em que a aceleração seja essa?
Problema 8.2. Um ponto descreve uma trajetória de equações paramétricas:
x = 10 cos(ωt)
y = 10 sen(ωt) ,
em que ω = π2 rad/s, t é dado em segundos e x e y em metros. Pede-se:
1. fazer o gráfico do movimento;
2. determinar as expressões da velocidade e da aceleração para um instante t qualquer;
3. determinar sobre os eixos x e y as velocidades e acelerações das projeções do ponto;
4. qual a relação entre o deslocamento e a aceleração sobre cada eixo?
Problema 8.3. Um ponto descreve uma trajetória cujas equações paramétricas são:
x = 12 t − 3 t2
y = 16 t − 4 t2 .
Pede-se:
22
u
Os dados numéricos destes problemas estão expressas no SI.
“ADT-MF” — 2005/11/7 — 8:51 — page 353 — #353
353
8.4. Aceleração absoluta, de transporte, relativa e de Coriolis
1. traçar a curva suporte da trajetória descrita entre t = 0 e t = 4 s;
2. calcular a velocidade e a celeridade instantânea para t = 0 e t = 4 s;
3. calcular o deslocamento entre t = 0 e t = 2 s;
4. calcular o espaço percorrido de t = 0 a t = 2 s.
Problema 8.4. Um ponto descreve uma trajetória de equações paramétricas:
π
x = 10 cos( 2 t)
y = 10 sen( π t),
2
1. fazer o gráfico do movimento da trajetória, calcular o vetor velocidade
para os instantes t = 1, 2, 3 e 4 s e representar no gráfico;
2. calcular a aceleração instantânea para t = 12 , 1, 2, 3 e 4 s e representar
no gráfico;
3. determinar o módulo do vetor velocidade;
4. calcular o espaço percorrido para t = 1, 2, 3 e 4 s;
5. calcular o vetor deslocamento para t = 1, 2, 3 e 4 s.
Problema 8.5. Calcule as componentes normal e tangencial da aceleração
(Solução à pág. 354)
nos problemas 8.3 e 8.4, nos instantes t = 0, 2, 5 e 6 s.
Problema 8.6. Um ponto descreve uma curva (trajetória) de equações paramétricas:
x = t − 2
t ∈ [0,4]
y = 1 (t − 2)3
3
Pede-se:
(Solução à pág. 358)
1. fazer o gráfico da curva suporte da trajetória;
2. determinar a velocidade e a aceleração para t = 2 s e t = 3 s;
3. calcular o raio de curvatura para t = 2 s e t = 3 s;
4. estando as unidades expressas em SI, explicite a unidade de cada fator
e de cada parcela numérica nas equações paramétricas.
“ADT-MF” — 2005/11/7 — 8:51 — page 354 — #354
354
Capítulo 8. Movimento de um ponto
Problema 8.7. Um homem corre sobre uma plataforma horizontal girante,
com velocidade constante de 0,5 m/s, na direção radial para fora. A velocidade de rotação da plataforma é de 0,5 rad/s. Quando o homem está a um
metro de distância do eixo da plataforma, pede-se:
(Solução à pág. 359)
1. fazer um diagrama do problema;
2. dizer qual a velocidade de transporte do homem;
3. qual a velocidade inercial do homem;
4. qual a sua velocidade relativa;
5. quais são as acelerações do homem.
Fazer a representação das grandezas num diagrama.
Solução do problema 8.5 que envolve os dados do Probl. 8.3 e do Probl. 8.4.
Do problema 8.3: x = 3,0t e y = 8,0t−0,8t2 . Portanto:
v x = 3,0
vy = 8,0 − 1,6t
q
daí, como |~v| = v2x + v2y ,
p
p
|~v| = 9,0 + (8,0 − 1,6t)2 = 9,0 + 64,0 − 25,60t + 2,56t2
p
= 73,0 − 25,60t + 2,56t2 ,
tira-se a aceleração tangencial em função do tempo:
at (t) =
d|~v|
−25,60 + 5,12t
= p
dt
2 73,0 − 25,60t + 2,56t2
portanto
d|~v| −25,60
at (0) =
= √
dt 0 2 73,0
−25,60 + 5,12 × 5
at (5) = p
2 73,0 − 25,60 × 5 + 2,56 × 52
−25,60 + 5,12 × 2
at (2) = p
2 73,0 − 25,60 × 2 + 2,56 × 22
−25,60 + 5,12 × 6
at (6) = p
2 73,0 − 25,60 × 6 + 2,56 × 62
⇒
at (0) ≈ −1,5 m/s2
⇒
at (5) = 0 m/s2
⇒
at (2) ≈ −1,37 m/s2
⇒
at (2) ≈ +0,75 m/s2 .
“ADT-MF” — 2005/11/7 — 8:51 — page 355 — #355
355
8.4. Aceleração absoluta, de transporte, relativa e de Coriolis
Para calcularmos a aceleração normal devemos usar a fórmula v2 /R, portanto
devemos calcular o raio de curvatura para os instantes dados. Temos que
̂ k̂ ı̂
3
v
~a ∧ ~v = a x ay az e
R = ~a ∧ ~v
v x vy vz Neste problema:
y = 8,0t − 0,8t2
x = 3,0t
z=0
v x = 3,0
vy = 8,0 − 1,6t
vz = 0
ax = 0
ay = −1,6
az = 0
̂
k̂
ı̂
~a ∧ ~v = 0
−1,6 0 3,0 8−1,6t 0 −1,6 0
0 0
0
−1,6 =
ı̂ + ̂ + k̂
8−1,6t 0
3,0 0
3,0 8−1,6t
= 1,6 × 3 k̂ = (4,8 m3 /s3 ) k̂
⇒
|~a ∧ ~v| = 4,8 m3 /s3 .
Donde
p
R(t) =
√
R(0) =
R(2) =
R(5) =
73,0 − 25,60t + 2,56t2
73,0
4,8
√ 3
31
4,8
√ 3
19
3
3
4,8
≈ 129 m
≈ 36 m
≈ 5,6 m
4,8
√
3
11,6
R(6) =
≈ 8 m.
4,8
Se considerarmos o eixo dos y como um eixo vertical na Lua e levando em
conta que o ponto do problema tem uma aceleração ay = 1,6 m/s2 constante,
“ADT-MF” — 2005/11/7 — 8:51 — page 356 — #356
356
Capítulo 8. Movimento de um ponto
Tabela 8.2: Resumo dos resultados do problema 8.3 – em SI.
t
0
1
2
3
4
5
6
x
0
3
6
9
12
15
18
y
0
7,2
12,8
16,8
19,2
20,0
19,2
|~v|
8,5
7,1
5,6
4,4
3,4
3,0
3,4
at
-1,50
-1,43
-1,37
-1,16
-0,76
0,00
0,76
an
R
129
36
1,6
8,0
5,6
8,0
Figura 8.30: Diagrama do movimento de equações paramétricas x = 3,0t e y = 8,0t −
0,8t2 , cuja aceleração é ~a = (1,6 m/s2 ) ̂.
“ADT-MF” — 2005/11/7 — 8:51 — page 357 — #357
357
8.4. Aceleração absoluta, de transporte, relativa e de Coriolis
enquanto que a x = 0, podemos dizer que o movimento do ponto é de um projétil
lançado na superfície da Lua com uma velocidade inicial v0 = 8,5 m/s e que
faz um ângulo de 69◦ com a horizontal (lunar local).
Do problema 8.4: as equações são:
2
x = 10 cos( π2 t)
v x = −10 π2 sen( π2 t)
a x = −10 π4 cos( π2 t)
y = 10 sen( π2 t)
vy = +10 π2 cos( π2 t)
ay = −10 π4 sen( π2 t)
2
Por outro lado R = v3 /|~a ∧ ~v| e v2 = v2x + v2y , assim
2 π
2
π
v2 = −10 sen( π2 t) + 10 cos( π2 t)
2
2
2
2 2
π
sen( π2 t) + cos( π2 t)
= 100
4
π2
π
= 100
⇒
v = 10 m/s .
4
2
A velocidade tem módulo constante, segue-e que a aceleração tangencial é
d|~v|
nula, isto é, at = dt
= 0. Por outro lado,
an =
Mas
ı̂
~a ∧ ~v = a x
vx
ay
= vy
|~v|2
R
e
R=
|~v|3
.
|~a ∧ ~v|
̂ k̂ ay az vy vz a x az a x ay az ı̂ + ̂ + k̂ .
vz v x vz v x vy Entretanto, az = 0 e vz = 0, logo ~a ∧~v se reduz ao último termo:
a x ay k̂
=
v x vy −10 π2 cos( π t) −10 π2 sen( π t)
4
2
4
2 k̂
= −10 π2 sen( π2 t) +10 π2 cos( π2 t) n
o
3
3
= −100 π8 cos2 ( π2 t) − 100 π8 sen2 ( π2 t) k̂
!
π3
π3
~a ∧ ~v = −100
k̂
⇒
|~a ∧ ~v| = −100 m2 /s3 ,
8
8
“ADT-MF” — 2005/11/7 — 8:51 — page 358 — #358
358
Capítulo 8. Movimento de um ponto
3
como |~v| = 10 π2 m/s, v3 = 1000 π8 m3 /s3 , e assim
v3
= 10 m (constante).
|~a ∧ ~v|
O raio de curvatura é pois constante, 10 m. O ponto descreve uma circunferência de raio R = 10 m, como já se sabia, pois a equação cartesiana é:
( 2 2 )
π
π
2
2
2
x + y = 10 cos t + sen t
= 102 = R2 .
2
2
R=
Figura 8.31: Enquanto o ponto P se desloca sobre a circunferência de raio R com
velocidade angular constante ω, suas projeções P1 e P2 , de coordenadas x = R cos(ωt)
e y = R sen(ωt), executam movimentos harmônicos simples de freqüência angular ω.
Solução do problema 8.6 As equações para t ∈ [0, 4 s] são:
x=t−2
y=
1
3 (t
− 2)
vx = 1
3
ax = 0
2
vy = (t − 2)
ay = 2(t − 2)
v3
|~a(t) ∧ ~v(t)|
13
R(2) = =∞
0 0
1 0
R(t) =
3
(2) 2
2,8
R(3) = ≈ 1,4
≈
2
0 2
1 1
“ADT-MF” — 2005/11/7 — 8:51 — page 359 — #359
359
8.4. Aceleração absoluta, de transporte, relativa e de Coriolis
t
0
1
2
3
4
x
-2
-1
0
1
2
y
-2,7
-1/3
0
1/3
2,7
vx
1
1
1
1
1
vy
4
1
0
1
4
ax
0
0
0
0
0
ay
-4
-2
0
2
4
Figura 8.32: O ponto O 0 é o centro de curvatura para t = 3 s e a tabela com o resumo
dos resultados do Probl. 8.6 (em SI).
Solução do problema 8.7
~vinercial = ~vtrans + ~vrel
~ainercial = ~atrans + ~arel + ~aCor
~
~vtrans = ω
~ ∧R
∴
|~vtrans | = ωR
= (0,5 rad/s)(1 m) = 0,5 m/s
|~vrel | = vhomem = 0,5 m/s
~atransporte = ~anormal + ~atang = ~an + ~0
|~atrans | = ω2 R = (0,5 rad/s)2 (1 m)
= 0,25 m/s2
~acoriolis = 2~
ω ∧ ~v
|~aCor | = 2ωv = 2(0,5 rad/s)(1 m/s)
= 1,0 m/s2 .
“ADT-MF” — 2005/11/7 — 8:51 — page 360 — #360
360
Capítulo 8. Movimento de um ponto
Figura 8.33: Homem correndo radialmente sobre uma plataforma horizontal girante.
“ADT-MF” — 2005/11/7 — 8:51 — page 361 — #361
Capítulo 9
Dinâmica ∗
Já estudamos as forças na Estática e as acelerações na Cinemática. Procuramos
em ambos os casos dar ênfase aos conceitos gerais que não sofressem nenhuma
restrição quanto passássemos os estudo da Dinâmica.
Na dinâmica estudaremos o efeito das forças sobre os corpos quando não
estão em equilíbrio.
Vimos no início do nosso estudo as três Leis de Newton, e aplicamos no
desenvolvimento desse estudo apenas a 1a e a 3a Leis de Newton; mencionamos a 2a Lei apenas para completar o conjunto de Leis que regem a Mecânica.
Definimos então a quantidade de movimento 1 de um corpo como sendo o vetor
~p = m~v, em que m é a massa e ~v sua velocidade. O conceito de massa do corpo
ficou para ser esclarecido mais tarde.
Antes de abordarmos o conceito de massa de um corpo convém esclarecer
a 2a Lei de Newton sob outro aspecto.
Para evitar circunlóquios vamos considerar no que segue o movimento de
uma partícula de massa m, ou de um corpo de dimensões muito pequenas de
modo que o movimento sobre si mesmo seja desprezível.
Se a partícula tem quantidade de movimento constante, então sua velocidade também o será, pois sua massa é constante na mecânica newtoniana:
~p = mm~v constante significa ~v constante.
Pela 1a Lei de Newton, se “uma partícula está em repouso ou em movimento retilíneo e uniforme, ~v constante, então ela permanecerá sempre neste
∗
u Este capítulo corresponde ao Fascículo 7, original inédito datilografado pelo próprio
Prof. Armando, sem data, sem preâmbulo; obtido do arquivo pessoal do Prof. Joaquim Pereira
Neto.
1
u Note-se que o termo quantidade de movimento tem como sinônimo momentum linear,
preferimos este àquele.
361
“ADT-MF” — 2005/11/7 — 8:51 — page 362 — #362
362
Capítulo 9. Dinâmica
estado a não ser que causas externas (as forças) o modifiquem”. Podemos portanto dizer que se uma partícula tem quantidade de movimento constante, então
ela satisfaz a 1a Lei de Newton.
A 2a Lei de Newton diz o que acontece quando sobre a partícula atuam
uma resultante não-nula. Com efeito, se a resultante F~ das forças externas que
atuam sobre a partícula, a quantidade de movimento variará, e a força F~ que
o ocasionou essa variação da quantidade de movimento será proporcional à
variação da quantidade de movimento por unidade de tempo, isto é:
d~p
F~ = k
.
dt
Tal é a 2a Lei de Newton, veja Fig. 9.1.
Figura 9.1: Ilustração para a 2a Lei de Newton, F~m atua sobre a partícula provocando
a variação ∆~p em ~p, no intervalo de tempo ∆t.
Se a força F~m atua sobre a partícula provocando-lhe uma variação ∆~p da
quantidade de movimento, num intervalo de tempo ∆t, então essa variação ∆~p
de ~p se efetua na direção e sentido da força F~m , e F~m será proporcional à
variação de ~p por unidade de tempo, isto é:
∆~p
.
F~m = k
∆t
Observe-se que nesse caso, sendo ∆t finito, F~m será a força média que atuou
durante o intervalo de tempo ∆t. De um modo geral:
(
)
∆~
p
d~p
F~ = lim k
=k
.
∆t→0
∆t
dt
A força F~ será a força instantânea que ocasionou a variação da quantidade de
movimento por unidade de tempo, calculada num dado instante t.
“ADT-MF” — 2005/11/7 — 8:51 — page 363 — #363
363
9.1. Massa inerte
Na Mecânica Newtoniana, sendo a massa da partícula constante, independente da velocidade, então:
d(m~v)
d~v
d~p
=k
= km
F~ = k
dt
dt
dt
= k m ~a ,
v
em que ~a = d~
dt é a aceleração da partícula.
O coeficiente de proporcionalidade k só depende do sistema de unidades
~ m ou ~a. Podemos escolher um sistema de unidades tal que
para se medir F,
k = 1, e nesse particular sistema vale a equação:
F~ = m ~a ,
equação conhecida como equação fundamental da dinâmica.
9.1
Massa inerte
Vamos agora esclarecer o conceito de massa inerte; comecemos examinando a
relação entre força aplicada a uma partícula (corpo), sua massa m e sua aceleração ~a.
I Em primeiro lugar, suponhamos que o corpo esteja em repouso no nosso
referencial inercial, aqui convém lembrar que na Dinâmica usamos sempre um
referencial inercial, a não ser que seja mencionado o contrário explicitamente;
para tirá-lo do repouso temos de aplicar-lhe uma força F~ que o acelerará. Experiências simples com vários corpos mostrarão que as acelerações produzidas
pelas mesma força F~ serão diferentes para cada corpo, eventualmente dois ou
mais poderão adquirir a mesma aceleração.
II Em segundo lugar, se o corpo está em movimento retilíneo e uniforme,
acontecerá o mesmo: para mudarmos a velocidade do corpo precisamos aplicar-lhe uma força (não-nula). Analogamente, vários corpos em movimento
com velocidades diferentes, mas constantes, adquirirão acelerações diferentes
quando lhes aplicam forças iguais.
III Em resumo, a aceleração adquirida por um corpo A pode ser maior ou
menor que aquela adquirida por um corpo B sob a ação da mesma força; essa
propriedade apresentada pelos corpos se denomina inércia do corpo. Assim
“ADT-MF” — 2005/11/7 — 8:51 — page 364 — #364
364
Capítulo 9. Dinâmica
por exemplo, se o corpo B adquire uma aceleração menor que o corpo A
~ se diz que B tem uma inércia maior
quando sob a ação da mesma força F,
que a de A; o copo A, tendo uma aceleração maior que B sob a ação da mesma
~ terá uma inércia menor que B. A medida da inércia de um corpo se
força F,
denomina massa do corpo. Para distinguir bem esse conceito de outros vamos
chamar essa massa de “massa inerte”, indicando-a por min em vez de simplesmente por m.
IV Como podemos medir a massa inerte de um corpo?
Já dissemos que a 2a Lei de Newton é um postulado, isto é, uma proposição tomada como verdadeira sem demonstração; ora, nesse postulado devemos
definir as grandezas que nele aparecem.
Na equação F~ = min ~a conhecemos a força e a aceleração, mas não a massa
inerte min . Podemos entretanto verificar que, para um dado corpo, as forças
F~ j , j = 1, 2, 3 . . . n, respectivamente são sempre proporcionais às respectivas
acelerações, isto é:2
F~ j = (constante) ~a j
⇒
|F~ j |
= (constante).
|~a j |
Ora, podemos tomar um corpo como padrão e dizer que sua massa inerte, min ,
é a unidade de massa inerte: min = 1 uin , donde:
F~ j = (1 uin ) ~a j
e relacionar as massas inertes dos outros corpos com essa unidade. Assim um
dado corpo B cuja massa inerte é min , submetido à força F~ j , adquirirá uma
aceleração ~a j0
F~ j = min ~a j0
F~ j = uin ~a j .
Portanto
min ~a j0 = uin ~a j
min =
ou
|~a j |
uin ,
|~a j0 |
2
Observação – os dois vetores F~ j e ~a j têm a mesma direção e sentido, e assim o
fator de proporcionalidade é um número positivo.
“ADT-MF” — 2005/11/7 — 8:51 — page 365 — #365
9.2. Massa gravífica
Figura 9.2: Partículas P1 e P2 interagem com força de atração gravitacional.
já que ~a j e ~a j0 têm a mesma direção e sentido, podemos portanto dizer que o
número que mede a relação entre a aceleração da massa inerte do padrão e a
aceleração da massa inerte do corpo B quando sob a ação da mesma força será
a medida da massa inerte do corpo B efetuada com a unidade de massa padrão,
ou simplesmente com a unidade de massa padrão.
9.2
Massa gravífica
Duas partículas postas em presença uma da outra exercerão mutuamente forças
de atração iguais em módulo e direção mas de sentidos contrários, mesmo que
tenhamos afastados todas as causas de interação entre elas por efeitos físicos
diversos, como por exemplo atração elétrica ou magnética.
As partículas P1 e P2 postas em presença uma da outra interagem com
força de atração, por uma propriedade intrínseca, inerente a elas, independentemente de outros fenômenos físicos. Essa propriedade se denomina atração
gravífica ou atração gravitacional entre as partículas, vale a 3a Lei de Newton:
dado um referencial inercial, a partícula P1 exerce sobre a partícula P2
uma força f~, vice-versa a partícula P2 exerce sobre a partícula P1 uma
força f~ 0 , de mesma intensidade mas de sentido contrário.
Medimos essa propriedade das partículas pelas suas massas gravíficas. Tomamos uma partícula arbitraria como tendo massa gravífica padrão, é o padrão
de massa gravífica, escolhido com critérios bem definidos, e se usa a própria
atração gravífica para relacionar a massa gravífica do padrão com a de outros
corpos.
Designaremos a massa gravífica por mg . A força de interação gravífica
entre duas partículas de massas gravífica m1g e m2g é expressa pela lei da gravitação universal de Newton 3 :
m1g m2g
| f~| = γ
(9.1)
r2
3
Como veremos mais tarde, Newton obteve essa lei por um processo intuitivo a
partir das leis de Kepler e em seguida postulado como válida para todas as partículas.
365
“ADT-MF” — 2005/11/7 — 8:51 — page 366 — #366
366
Capítulo 9. Dinâmica
a intensidade da força de atração entre duas partículas é proporcional ao produto das massas gravíficas e inversamente proporcional ao quadrado da distância entre elas. O coeficiente de proporcionalidade γ depende apenas das unidades para medir a força, as massas gravíficas e a distância entre as partículas.
Essa Lei é geral e vale tanto para partículas muito pequenas como para planetas e estrelas. Foi descoberta por Newton que dela teve a intuição através das
três (3) Leis de Kepler, Johannes Kepler (1571–1630), astrônomo alemão, descobriu as Leis do movimento dos planetas a partir do estudo das observações
precisas registradas por Tycho Brahe, astrônomo dinamarquês (1546–1601).
Lembremos que as massas gravíficas originam um fenômeno físico semelhante ao produzido pelas cargas elétricas, ou pelas massas elétricas, q1 e q2 :
a interação entre 2 cargas elétricas pontuais q1 e q2 é uma força f~ proporcional ao produto das cargas elétricas e inversamente proporcional ao
quadrado da distância:
|q1 q2 |
.
| f~| = k
r2
Entretanto, enquanto as massas gravíficas só se atraem, as cargas elétricas
podem atrair-se ou repelir-se.
Há dois tipos de cargas elétricas, classificadas originalmente de vítrea e resinosa; a vítrea por ser obtida pelo atrito de um bastão de vidro com um pano
de flanela, e a resinosa por ser o bastão de resina. Verificou-se experimentalmente que só podiam existir esses dois tipos de cargas elétricas, uma anulando
a outra quando fossem na mesma quantidade. As cargas de mesmo nome se
repelem e as de nome contrário se atraem. Pode-se mostrar que essas cargas
se comportam como grandezas algébricas, de modo que se pode atribuir-lhes
um sinal, positivo ou negativo, e assim designá-las pelo sinal e não pelo nome
vítrea ou resinosa.
A lei de interação entre as massas elétricas é denominada Lei de Coulomb:
fe = k
q1 q2
r2
(9.2)
Charles Augustin Coulomb (1736–1806), físico francês; de suas pesquisas sobre elasticidade de torção de fios e cabelos inventou a balança de torção
(1777) que posteriormente usou para descobrir a Lei (9.2) entre massas (cargas) elétrica.
Vemos que tanto a lei de gravitação universal de Newton (9.1) como a leu
de Coulomb (9.2) teem a mesma forma. A grande diferença é que à massa
“ADT-MF” — 2005/11/7 — 8:51 — page 367 — #367
9.3. Massa gravífica e a massa inerte
Figura 9.3: Forças de repulsão (cargas de mesmo sinal) e de atração (cargas de sinais
opostos).
gravífica só se pode atribuir um sinal, e ainda, as forças entre as massas gravíficas é sempre atrativa, enquanto que no caso das forças elétricas a força de
interação entre as massas de mesmo sinal é sempre repulsiva.
É lícito deste modo concluir que a massa gravífica nada tem a ver com a
massa inerte de uma partícula, pelo menos do ponto de vista das propriedades
estabelecidas acima.
9.3
Relação entre a massa gravífica e a massa inerte
Suponhamos uma partícula de massa m num lugar da Terra cuja latitude 4 seja
ϕ, e que a partícula esteja suspensa de um fio, conforme indica a Fig. 9.4.
Essa partícula, em virtude do movimento de rotação da Terra, gira, descrevendo uma circunferência no sistema de referência seguinte: o centro da Terra
é tomado como origem do sistema de eixos Oz é coincidente com o eixo da
Terra, o eixo Ox na direção do Sol e passando por ele, e o eixo Oy ortogonal
aos outros dois, o sistema xyz formando um sistema sinistrorso (ou sistema
direto).
O raio da circunferência descrito é r = R cos ϕ, em que R é o raio da Terra.
Observe-se que a partícula participa de todos os movimentos da Terra, os
principais sendo:
1o ) o de translação da Terra em torno do Sol; e
2o ) o de rotação da Terra em torno de seu eixo, e portanto do eixo Oz do
citado sistema de referência.
4
latitude geográfica: ângulo entre a normal à superfície da Terra, suposta esférica,
e o plano do equador.
367
“ADT-MF” — 2005/11/7 — 8:51 — page 368 — #368
368
Capítulo 9. Dinâmica
Figura 9.4: T~ tem a direção do fio que suspende a partícula, i.e., da vertical local; S é
o suporte vertical do fio.
O movimento de translação em torno do Sol pode ser considerado um movimento retilíneo e uniforme, tendo em vista que o raio da órbita terrestre é muito
grande, por conseguinte o sistema Oxyz pode ser considerado um sistema inercial, para todos os cálculos que se farãoaqui. A Terra
gira em torno do eixo Oz
π
~ = 12
rad/h k̂, vetor dirigido ao longo do
com velocidade angular constante ω
eixo da Terra para o Pólo Norte e portanto para ao longo do eixo Oz.
9.3.1
Forças que atuam sobre a partícula
As forças que atuam sobre a partícula são: a tensão T~ do fio e a atração da Terra
~ portanto a resultante das forças sobre ela será R
~ = P+
~ T~ . Essa resultante R
~
P,
será a força centrípeta que mantém a partícula sobre a circunferência descrita
por ela, ao ser arrastada no movimento de rotação da Terra.
Teremos então
~=P
~ + T~ = min ~an ,
R
em que ~an é a aceleração norma à trajetória da partícula, portanto
an = ω2 r = ω2 R cos ϕ .
~ é a atração gravífica da Terra, portanto
Ora, observe-se que P
P=γ
mg MgT
,
R2
“ADT-MF” — 2005/11/7 — 8:51 — page 369 — #369
369
9.3. Massa gravífica e a massa inerte
em que MgT é a massa gravífica da Terra e γ a constante de gravitação universal 5
dyn cm2
γ = (6,670 ± 0,005)×10−8
.
g2
Deste modo,
~
T~ = min ~an − P
= min ~an − γ
mg M
ρ̂ ,
R2
~ e M = MgT .
em que ρ̂ é o versor de R,
A tensão do fio será portanto a diferença vetorial entre uma força de inércia 6 e uma força gravífica, que é a força de atração gravífica entre a Terra e a
partícula. Temos
~=γ
P
mg M
r̂
R2
ou
1 ~
M
~,
P = γ 2 r̂ = G
mg
R
esse vetor será a força por unidade de massa gravífica no ponto onde se acha a
partícula. Deste modo teremos:
~.
T~ = min ~an − mg G
Suponhamos que agora tenhamos duas partículas de massas gravíficas mg1
e mg2 , e tais que mg2 = c mg1 , em que c é uma constante, nesse caso, se a massa
inerte não variar na mesma proporção, isto é, se min2 , c min1 , então a direção de
T~ variará quando trocarmos a partícula suspensa pelo fio; mas se min2 = c min1 ,
então o vetor T~ continuará na mesma direção.
Pode-se medir as variações de T~ por diferentes métodos e desde o século
XIX que se aceita com como experimentalmente comprovado que variações
5
u
O valor
γ = (6,670 ± 0,005)×10−8
dyn cm2
= (6,670 ± 0,005)×10−11 N m2 kg−2
g2
= (6,670 ± 0,005)×10−11 m3 kg−1 s−2
tem como valor recomendado pelo CODATA:
= (6,673 ± 0,010)×10−11 m3 kg−1 s−2 .
6
Força centrípeta: produto da massa inerte pela aceleração centrípeta ou normal.
“ADT-MF” — 2005/11/7 — 8:51 — page 370 — #370
370
Capítulo 9. Dinâmica
de T~ dentro de um erro relativo de 10−9 não são verificadas, e deste modo
chega-se à conclusão de que as massas inertes são função linear das massas
gravíficas, pois, neste caso, se mg2 = c mg1 , então também termos min2 = c min1 .
De fato, se a massa inerte é função linear da massa gravífica, teremos min =
κ mg , sendo κ uma constante. Ora, se mg2 = c mg1 , então
min2 = κ mg2 = κ c mg1 = c κ mg1
mas
logo
κ mg1 = min1
min2 = c min1
como queríamos provar.
Ora, escolhendo-se convenientemente as unidades de massa inerte e de
massa gravífica, pode-se pôr κ = 1, e, neste caso, pode-se dizer que a massa
inerte e a massa gravífica de uma partícula são iguais, a menos de um erro
relativo da ordem de 10−9 .
Considera-se que tal fato tenha sido estabelecido com a balança (de torção)
de Eötvös 7 e o seu resultado já era amplamente conhecido pelos mecânicos do
século XIX, que porém não lhe atribuíram nenhum outro significado. Estudaremos mais adiante (§9.4) a Balança de Eötvös e o seu método.
Einstein sem levar em conta esse resultado experimental postulou a igualdade entre a massa inerte e a massa gravífica: min = mg , tirando desse postulado
conseqüências notáveis.
Tal postulado é a base de toda a teoria da Relatividade Geral de Einstein,
por isso mesmo os físicos teem procurado aumentar a precisão de suas medições a fim de verificar se oculta no erro experimental não existe uma desigualdade, o que traria a invalidade para o postulado de Einstein com conseqüências
funestas para a sua Teoria Geral da Relatividade.
Em experiências recentes e usando a gravitação do Sol e partículas de diferentes materiais: ouro, platina, cobre, água, vidro, etc., a precisão aumentou
muito, colocando-se o erro relativo em 10−12 .
9.3.2
Observação
Já vimos que a tensão do fio que mantém a partícula pendurada é dada por
~ O peso do corpo medido com um dinamômetro e o valor de
T~ = min ~an −mg G.
|T~ |, a T~ se denomina peso aparente. O estudante deve procurar entender o uso
7
Baron Loránd von Eötvös (1848–1919), físico húngaro.
“ADT-MF” — 2005/11/7 — 8:51 — page 371 — #371
9.3. Massa gravífica e a massa inerte
de sistemas de referência não-inerciais, tendo em vista que muitos livros usam
tais sistemas para explicar o que foi explanado acima.
Para o estudo de tais sistemas veja-se parágrafo 8.3, pág. 337. Representamos o sistema não-inercial do seguinte modo: o eixo O0 ζ coincide com o eixo
de rotação da Terra e portanto com o eixo Oz da figura Fig. 9.4, veja Fig. 9.5;
o eixo O0 ξ ortogonal a O0 ζ e que passa pela partícula; o eixo O0 η ortogonal
aos dois e formando um sistema sinistrorso. Esses eixos O0 ξηζ estão fixos na
Figura 9.5: Sistema não-inercial O0 ξηζ; V: vertical; ~p : peso aparente; ~p = −T~ .
Terra e, portanto, participam de seu movimento de rotação e do de translação.
Para as medições efetuadas, o movimento de translação pode ser considerado
retilíneo e uniforme, tendo em vista que o raio da órbita terrestre (em relação
ao Sol) é muito grande e que, durante a experiência, o arco descrito pode ser
considerado um segmento retilíneo.
No sistema O0 ξηζ o observador imóvel e contemplando a partícula pendu~ e f~cf que a puxa, no seu
rada a vê em repouso sob a ação de três forças: T~ , P
0
sistema, para fora ao longo do eixo O ζ, o equilíbrio advém da resultante de
~ que anula essa “força centrífuga” f~cf . Na Fig. 9.5 representamos o sisT~ e P
tema O0 ξηζ e a força f~cf que aparece nesse sistema como uma força real (i.e.,
~ e T~ , resultant essa que no sistema
mensurável) equilibrada pela resultante de P
inercial Oxyz é a força centrípeta f~cf .
A partícula em Oxyz tem uma velocidade de transporte vtrans = ωr e uma acele~ T~ | = |m~an | = mω2 r. Na Fig. 9.5
ração ~an sob a ação da força centrípeta | f~cp | = |P+
0
vemos que a partícula no sistema O ξηζ está em repouso sob a ação das forças
~ e f~cf cuja resultante é nula: T+
~ P+
~ f~cf = ~0. No sistema Oxyz a partícula tem
T~ , P
~ T~ = f~cf = min~an .
uma velocidade de transporte ωr e uma aceleração centrípeta P+
371
“ADT-MF” — 2005/11/7 — 8:51 — page 372 — #372
372
Capítulo 9. Dinâmica
9.4
A balança de Eötvös
Vejamos em que consiste a balança de Eötvös e como se se procede para comparar com ela a massa inerte com a massa gravífica. Suponhamos duas partículas de massas gravíficas mg1 e mg2 , iguais mg2 = mg1 , cada uma na extremidade
de uma haste que por sua vez é suspensa por um fio muito fino preso ao seu
ponto médio, veja Fig. 9.6. A direção da haste é a leste-oeste.
Figura 9.6: Balança de Eötvös.
A Balança de Eötvös não é mais que uma haste H encerrada num tubo A
no meio do qual é adaptado ortogonalmente um outro tubo B por onde passa o
fio de suspensão e cuja extremidade livre é fixada num parafuso C colocado na
extremidade do tubo B. Esse parafuso pode girar torcendo o fio de suspensão
e colocando uma das partículas na extremidade da haste H no zero da escala E
na extremidade do tubo A.
As duas partículas estarão sob a ação das forças centrípetas ~f1 e ~f2 em
equilíbrio com a força de torção do fio, o qual foi torcido para colocar a partícula 2, por exemplo, no zero da escala, eventualmente o torção no fio pode ser
zero.
Em princípio ~f1 , ~f2 , pois os materiais que constituem as partículas são diferentes, ouro, vidro, platina, chumbo, cobre, etc, e neste caso seus momentos
estarão em equilíbrio com o momento de torção do fio.
Suponhamos agora que se faça uma rotação de 180◦ em toda a balança; a
nova posição as forças ~f1 e ~f2 vão produzir momentos de sentidos contrários
ao produzidos na posição
anterior, por exemplo, se ~f2 tendia a fazer girar no
,→
sentido dextrorso M~f2 =~r2 ∧ ~f2 , agora no posição nova o vetor ~r20 tem sentido
“ADT-MF” — 2005/11/7 — 8:51 — page 373 — #373
373
9.4. A balança de Eötvös
,→
contrário ao de ~r2 e o momento de ~f2 sendo M~0 =~r20 ∧ ~f2 tenderá a fazer girar
f2
a partícula em sentido contrário ao anterior, o mesmo ocorre com ~f1 . Se, por
exemplo, M~f2 > M~f1 na primeira posição, o momento da torção do fio tende a
fazer girar no sentido contrário ao momento de ~f2 , ao fazer porém uma rotação
de 180◦ em todo o dispositivo, o momento de ~f2 inverte o sentido, como vimos,
e se soma portanto ao sentido da torção e haverá um deslocamento do equilíbrio, a partícula 2 sairá do zero da escala. Esse tipo de balança de torção foi
inventado pelo Báró Loránd von Eötvös (1848–1919), físico húngaro, nascido
e falecido em Budapest; desenvolveu pesquisas sobre capilaridade, gravitação
e geomagnetismo, inventou a balança descrita acima, a qual utilizou nos seus
estudos sobre gravitação e geomagnetismo em 1888 em Budapest, cf. [32].
Eötvös verificou que, a menos de um erro relativo de 5×10−9 , o equilíbrio
entre as forças que atuam nas partículas permanece inalterado quando se efetua
uma rotação de 180◦ em todo o dispositivo. Em trabalho recente [11] Roll P.
G., Krotkov, e Dicke R. H., usando a força de gravitação do Sol, acharam para
o alumínio e o outro o mesmo resultado, com precisão de 1 parte em 10−11 , e
ainda Bragisnkii V. B. e Panov V. I. [1], com uma precisão de 10−12 chegaram
ao mesmo resultado para o alumínio e a platina.
A grande maioria dos físicos baseados nessas experiências chegam a conclusão de que a massa inerte de uma partícula min é igual a sua massa gravífica
mg a menos de um erro relativo de 10−12 . Essa assertiva não é porém verdadeira, como veremos.
A balança de Roll et al. [11] consiste em um triângulo equilátero de barras
de quartzo de 6,0 cm de lado; dois pesos de alumínio estão pendurados um em
cada vértice do triângulo e no 3o vértice um cilindro de ouro de mesmo peso
aproximadamente. O fio de suspensão era de fibra de quartzo de 10,8 polegadas
de comprimento e 0,001 de polegada de diâmetro. A direção do fio passava
pelo centro do triângulo. Foi usada a atração do Sol. A posição do triângulo
era registrada quando o Sol se erguia e também 12 horas depois quando o Sol se
punha, invertendo os sinais dos momentos sobre o triângulo. Não foi verificada
nenhuma mudança da posição de equilíbrio dentro da precisão citada.
Neste caso, o momento resultante sobre o triângulo pode ser demonstrado
que é proporcional ao parâmetro
h i
η(A,B) =
M
m
h iA
M
m A
−
+
2
h i
M
m
h iB ,
M
m B
“ADT-MF” — 2005/11/7 — 8:51 — page 374 — #374
374
Capítulo 9. Dinâmica
o símbolo
h i
M
m A
significa: massa gravífica M da partícula A dividida por sua
h i
massa inerte m; o mesmo significando para M
m B para a partícula B. A difeh i
h i
M
M
rença m − m resultados momentos opostos das forças sobre cada parA
B
tícula. Os autores deixam dentro do parêntese as grandezas que eles supõem
variáveis para cada partícula, o que faria com que o momento resultante fosse
diferente de zero em equilíbrio com o momento da torção do fio.
No trabalho de Eötvös o parâmetro usado é χA − χB , símbolos definidos no
que segue. A lei de atração universal de Newton para o caso vigente pode ser
escrita
MA MT
F=γ
,
R2
em que F é a atração da Terra de massa gravífica MT sobre a partícula de massa
gravífica MA , R o raio da Terra e γ a constante de gravitação universal. Eötvös
et al. consideram as massas inerte e gravífica das partículas como constantes
enquanto que o coeficiente γ é a variável para cada partícula de constituição
diversa, deste modo teríamos γA , γB e γS correspondente a cada partícula A,
B e S , esta última sendo constituída de uma substância tomada como padrão.
Eötvös tomou como substância padrão a água. Neste caso χA = γγSA e χB = γγSB ,
tais coeficientes específicos de atração.
Observe-se que se mudarmos a hipótese e tomarmos como constante γ e
supormos que as variáveis são as massas inerte e gravífica, obtemos o parâmetro η(A, B) de Roll et al. ou o parâmetro ∆ de Brangiskii e Panov definido a
seguir.
A balança de Brangiskii e Panov é uma balança de torção que pode entrar
em ressonância com a alternância do Sol no horizonte, com um período de 24
horas. Para obter a ressonância foi usado um fio de suspensão de tungstênio de
2900 mm de comprimento e 5×10−4 cm de diâmetro. Uma das extremidades
do fio era fixa e a outra presa a “um octógono 8 com massas iguais, quatro
de alumínio e quatro de platina nos vértices”. O todo estava dentro de um
recipiente em alto vácuo.
Neste caso o parâmetro era:
∆=
mA
MA
mA
MA
−
+
mB
MB
mB
MB
,
2
com o mesmo significado para os símbolos que no parâmetro η(A, B).
8
Estrela de oito pontas.
“ADT-MF” — 2005/11/7 — 8:51 — page 375 — #375
375
9.4. A balança de Eötvös
É claro que de cada experiência poderíamos obter o mesmo parâmetro;
sendo assim, o raciocínio que vamos fazer para o parâmetro ∆ se aplica a qualquer um deles “mutatis mutandis”.
Se o parâmetro ∆ é zero dentro de um erro relativo de 10−12 , podemos pôr,
dentro do mesmo erro, que:
mB
mA
−
=0.
MA M B
(9.3)
Isto significa, pelo resultado da experiência, que a relação entre a massa inerte
de uma partícula e sua massa gravitacional é independente da sua constituição
seja ela de ferro, platina, alumínio, ouro, bismuto, cobre, latão, etc., tais foram
os materiais testados, incluindo os de Eötvös.
Todavia, dizer que a experiência prova que a massa inerte de uma partícula
é igual à sua massa gravífica requer outra prova. De fato, há duas classes de
funções que satisfazem a igualdade (9.3):
1o ) Funções lineares, isto é: a massa inerte de uma partícula é função linear de sua massa gravífica m = c M, em que c é uma constante que só
depende das unidades usadas;
2o ) Funções unívocas, não necessariamente lineares, isto é, a massa inerte é
uma função unívoca, não-linear, da massa gravífica m = f (M), em que f
é tal função.
Ora, pela primeira classe de funções podemos pôr m = M, a massa inerte é
igual à massa gravífica, mas a segunda classe de funções não nos permite fazer
tal coisa. Com efeito, lembremos que seja qual for o tipo de partículas postas
nas extremidades da hate da balança de Eötvös, suas massas gravitacionais são
praticamente iguais e temos portanto que:
MA = M B ,
logo se segue que mA = f (MA ) = f (MB ) = mB ,
visto que f é uma função unívoca, o que significa que
mB
mA
=
,
MA
MB
pois os denominadores das frações são iguais e o denominadores também,
donde a igualdade (9.3).
Segue-se que a não ser que se obtenha uma outra prova de que a massa
inerte de uma partícula seja uma função linear de sua massa gravífica, não
“ADT-MF” — 2005/11/7 — 8:51 — page 376 — #376
376
Capítulo 9. Dinâmica
podemos concluir pela igualdade entre as suas massas, com o resultado da
experiência de Eötvös.
Podemos deste modo considerar errôneo dizer que a experiência de Eötvös mostrou “com erro relativo de 10−12 que a massa inerte de uma partícula
é igual à sua massa gravífica”, como é feito usualmente nos livros de Física.
Veja-se [28].
9.5
Sistema de unidades mecânicas
Já vimos que a equação fundamental da dinâmica pode ser escrita F~ = κ m ~a,
em que κ é um coeficiente de proporcionalidade que depende apenas das unidades usadas para as grandezas aí representadas. As unidades que entram nessa
igualdade são as de força, massa e aceleração que, por sua vez se reduz às de
comprimento e tempo. Podemos então definir uma das unidades a partir dessa
equação em função das outras unidades e de tal modo que κ = 1, isto é, a
equação se torna
~ = m |~a|
F~ = m ~a ⇒ |F|
(9.4)
para esse particular sistema de unidades. A equação (9.4) se denomina equação
de definição da unidade em questão.
As unidades de comprimento e tempo são unidades que se tomam sempre
como fundamentais, podendo então definir-se:
1. a unidade de força a partir das unidades fundamentais 9 de massa, comprimento e tempo;
2. a unidade de massa, tomando-se como fundamentais as de força, comprimento e tempo.
No primeiro caso, os sistemas de unidades assim formados se denominam
MLT, M (massa), L (comprimento) e T (tempo); no segundo caso os sistemas
de unidades se denominam FLT, F (força), L (comprimento) e T (tempo)
Tais sistemas de unidades se denominam absolutos de unidades, para dar
ênfase à relevância da mecânica em todos os fenômenos físicos, ponto de vista
que foi abandonado, preferindo-se designar esses sistemas por sistemas coerentes de unidades mecânicas. Os outros que não seguem essa sistemática se
denominam incoerentes.
As três grandezas das quais se deriva a outra se denominam grandezas
fundamentais e a outra grandezas derivada. No sistema MLT as fundamentais
9
u
Essa é a opção do SI.
“ADT-MF” — 2005/11/7 — 8:51 — page 377 — #377
377
9.5. Sistema de unidades mecânicas
são as grandezas de massa (M), comprimento (L) e tempo (T), e a grandeza
derivada a de força (F). A equação de definição é sempre (9.4), isto é, em ter~ = m |~a|, ou ainda F = m a. Nos sistema FLT, as grandezas
mos de módulos: |F|
fundamentais são as de força (F), comprimento (L) e tempo (T), e a grandeza
derivada a de massa (M).
9.5.1
Sistemas MLT
9.5.1.1
Sistema CGS
Unidades fundamentais:
unidade
centímetro
grama
segundo
dina
Unidade derivada:
C
G
S
(F)
Equação de Definição
F = ma
Definição
símbolo
cm
g
s
dyn
grandeza
comprimento
massa
tempo
força
1 dyn = 1 g cm/s2
Definição em português Uma dina é a força que imprime à massa de
um grama a aceleração de um centímetro por segundo ao quadrado.
9.5.1.2
Sistema MKS
Unidades fundamentais:
M
K
S
Unidade derivada:
Equação de Definição
Definição
unidade
metro
quilograma
segundo
newton
símbolo
m
kg
s
N
grandeza
comprimento
massa
tempo
força
F = ma
1 N = 1 kg m/s2
Definição em português Um newton é a força que imprime à massa de
um quilograma a aceleração de um metro por segundo ao quadrado.
“ADT-MF” — 2005/11/7 — 8:51 — page 378 — #378
378
Capítulo 9. Dinâmica
Unidades fundamentais:
F
P
S
Unidade derivada:
unidade
pé (foot)
libra-massa (pound)
segundo
símbolo
ft
lb
s
libra-força (poundal)
pdl
grandeza
comprimento
massa
tempo
força
1 ft = 30,48 cm
1 lb = 453,59 g
9.5.1.3
Sistema inglês FPS
Equação de Definição
Definição
F = ma
1 pdl = 1 lb ft/s2 = 0,1382549544 N
Definição em português Um poundal (uma libra-força) é a força que
imprime à massa de uma libra-massa a aceleração de um metro por segundo
ao quadrado.
9.5.2
Sistemas FLT
Grandezas fundamentais 10 : F (força), L (comprimento) e T (tempo).
9.5.2.1
Sistema métrico técnico
Unidades
fundamentais:
F
L
T
Unidade derivada:
unidade
quilograma-força
metro
segundo
unidade técnica de massa
símbolo
kgf ou kg∗
m
s
utm
grandeza
força
comprimento
tempo
massa
Observação A unidade de massa neste sistema não tem nome especial,
é usualmente indicada por “unidade técnica de massa” e pelo símbolo utm ou
u.t.m. .
Equação de Definição
10
F = ma
Cuidado, não confundir o F de força com o F de ft de comprimento do sistema
inglês.
“ADT-MF” — 2005/11/7 — 8:51 — page 379 — #379
379
9.5. Sistema de unidades mecânicas
Definição 1 utm = 1 kgf s2 /m = 9,80665 N, note-se que 1 kgf é a intensidade de força igual ao peso de uma massa de 1 kg numa região onde a
aceleração local da gravidade é igual a 9,80665 m/s2 .
Definição em português Uma utm é a massa que, sob a ação de da força
de um quilograma-força, adquire a aceleração de um metro por segundo ao
quadrado.
9.5.2.2
Sistema técnico inglês
Unidades fundamentais:
F
L
T
Unidade derivada:
Equação de Definição
Definição
unidade
libra-força
foot
segundo
slug
símbolo
lb∗
ft
s
slug
grandeza
força
comprimento
tempo
massa
F = ma
1 slug = 1 lb s2 /ft
Definição em português Um slug é a massa que, sob a ação de da força
de uma libra-força, adquire a aceleração de um pé por segundo quadrado.
Estes são os sistemas de unidades mecânicas principais que o estudante deve
aprender 11 . Antes de abordarmos os sistemas incoerentes, convém esclarecer
as unidades fundamentais.
9.5.3
O Sistemas métrico
O sistema métrico foi implantado no França pela revolução francesa em 1799,
durante as últimas fases dessa revolução e tornado obrigatório depois de 1820.
Os criadores do sistema métrico procuraram definir as unidades fundamentais
de modo que fossem independentes do homem e universais. Assim, em vez
de unidades como o pé, o palmo, a jarda, a polegada que variavam de uma
região para outra, definiram o metro que seria a décima milionésima parte da
distância entre o equador ao pólo norte passando por Paris. Essa unidade correspondente a essa medida foi reproduzida numa barra de platina iridiada com
11
u Note-se que atualmente as publicações em todo o mundo fazem uso do SI, Sistema
Internacional de Unidades [3], que tem por base o MKS.
“ADT-MF” — 2005/11/7 — 8:51 — page 380 — #380
380
Capítulo 9. Dinâmica
traços transversais nas extremidades, a distância entre dois traços, um em cada
extremidade dessa barra a 0 ◦ C, é o metro. Definiram em seguida múltiplos e
submúltiplos desse padrão como potências de 10, usando prefixos gregos para
os múltiplos e latinos para o submúltiplos: para o padrão metro
múltiplos do metro
submúltiplos do metro
prefixo
deca
hect(o)
quilo
deci
centi
mili
símb.
da
h
k
d
c
m
valor
101
102
103
10−1
10−2
10−3
nome
símb. valor
decâmetro dam 101 m
hectômetro hm 102 m
quilômetro km 103 m
decímetro
dm 10−1 m
centímetro cm 10−2 m
milímetro
mm 10−3 m
O sistema Internacional (SI) de Unidades é estabelecido em Conferência
Gerais de Pesos e Medidas (CGPM) realizadas de tempos em tempos e estabelecem normas, definições, nomes das unidades e seus símbolos cujo uso é
recomendado a todos os países. O Brasil observa essas recomendações no seu
sistema legal, tornando obrigatório o seu uso. Os prefixos a serem usados para
Tabela 9.1: A fonte dos símbolos é o documento oficial do SI (BIPM–1998; NIST–
2001). A fonte da ortografia em português é o INMETRO (Portaria no 002, de 06 de
janeiro de 1993).
Prefixos SI
Fator
1024
1021
1018
1015
1012
109
106
103
102
101
Nome
yotta
zetta
exa
peta
tera
giga
mega
quilo
hecto
deca
Símbolo
Y
Z
E
P
T
G
M
k
h
da
Fator
10−1
10−2
10−3
10−6
10−9
10−12
10−15
10−18
10−21
10−24
Nome
deci
centi
mili
micro
nano
pico
femto
atto
zepto
yocto
Símbolo
d
c
m
µ
n
p
f
a
z
y
“ADT-MF” — 2005/11/7 — 8:51 — page 381 — #381
381
9.5. Sistema de unidades mecânicas
as unidades estão listados na Tab. 9.1. 12 O fator que consta na tabela é o valor
que deve ser multiplicada a unidade, exemplo:
unidade metro
µm = 10−6 m, micômetro;
nm = 10−9 m, nanômetro;
pm = 10−12 m, picômetro;
fm = 10−15 m, fentômetro;
am = 10−18 m, attômetro;
analogamente,
Tm = 1012 m, terrâmetro;
Gm = 109 m, gigâmetro;
Mm = 106 m, megâmetro;
km = 103 m, quilômetro.
Do mesmo modo se diz decâmetro, hectômetro, quilomêtro, etc. Esses prefixos
se usam com qualquer unidade: grama 13
µg = 10−6 g, micograma;
ng = 10−9 g, nanograma;
pg = 10−12 g, picograma;
fg = 10−15 g, fentograma;
ag = 10−18 g, attograma;
18
analogamente,
12
Eg = 10 g, exagrama;
Tg = 10 g, terrograma;
Gg = 109 g, gigograma;
Mg = 106 g, megograma, etc.
O padrão do metro é conservado no Bureau Internacional de Pesos e Medidas, em Sèvres, próximo a Paris. Entretanto, temendo a destruição do padrão
e também pelo incômodo causado pelos padrões secundários, réplicas do padrão, para todos os países, os quais devem ser comparados, periodicamente,
com o padrão original, a Conferência Geral de Pesos e Medidas, em 14 de
outubro de 1969 mudou a definição do padrão de comprimento, definindo-o
12
u Com referência à Tab. 9.1, note-se que o símbolo para o micro é a letra grega µ, desse
modo não-inclinado, e não µ, em itálico, que fica reservado para variável matemática, p.ex.,
µ = 12,3 µm, que se lê “mi igual a 123 décimos de micro metro”.
Note-se ainda o equivalente aos seguintes prefixos:
k = um mil da unidade indicada
= 103 = 1.000
M = um milhão da unidade indicada = 106 = 1.000.000
G = um bilhão da unidade indicada = 109 = 1.000.000.000
T = um trilhão da unidade indicada = 1012 = 1.000.000.000.000 .
13
u Não confundir “exagrama”, um submúltiplo do grama; com “hexagrama”, reunião de
seis caracteres ou estrela de seis pontas.
“ADT-MF” — 2005/11/7 — 8:51 — page 382 — #382
382
Capítulo 9. Dinâmica
em função do comprimento de onda da luz vermelho alaranjada emitida pelos
átomos de criptônio 89, assim o metro passou a ser igual a 1.650.763,73 vezes
o comprimento de onda dessa luz, ou mais precisamente: 14
Metro é o comprimento igual a 1.650.763,73 comprimentos de onda, no
vácuo, da radiação correspondente à transição entre os níveis 2p10 e 5p5
do átomo do criptônio 86.
Essa definição foi ratificada pela 11a Conferência Geral de Pesos e Medidas em 14 de outubro de 1969.
14
u Recentemente se adotou nova definição para o metro, que transcrevemos de [3,
§2.1.1.1 Unidade de Comprimento (metro)]:
A definição do metro baseada no protótipo internacional em platina iridiada, em vigor desde
1889, foi substituída na 11a CGPM (1960) por uma outra definição baseada no comprimento de onda de uma radiação do criptônio 86, com a finalidade de aumentar a exatidão
da realização do metro. A 17a CGPM (1983, Resolução 1; CR 97 e Metrologia, 1984, 20,
25) substituiu, em 1983, essa última definição pela seguinte:
“O metro é o comprimento do trajeto percorrido pela luz no vácuo durante
um intervalo de tempo de 1/299.792.458 de segundo.”
Essa definição tem o efeito de fixar a velocidade da luz em 299.792.458 m s−1 , exatamente.
O antigo protótipo internacional do metro, que fora sancionado pela 1a CGPM em 1889,
é conservado no Bureau Internacional de Pesos e Medidas nas mesmas condições que
foram fixadas em 1889.
Por sua vez, para o segundo, transcrevemos de [3, §2.1.1.3 Unidade de Tempo (segundo)]:
Primitivamente, o segundo, unidade de tempo, era definido como a fração 1/86 400 do dia
solar médio. A definição exata do “dia solar médio” fora deixada aos cuidados dos astrônomos, porém os seus trabalhos demonstraram que o dia solar médio não apresentava as
garantias de exatidão requeridas, por causa das irregularidades da rotação da Terra. Para
conferir maior exatidão à definição da unidade de tempo, a 11a CGPM (1960) sancionou
outra definição fornecida pela União Astronômica Internacional, e baseada no ano trópico.
Na mesma época as pesquisas experimentais tinham já demonstrado que um padrão atômico de intervalo de tempo, baseado numa transição entre dois níveis de energia de um
átomo, ou de uma molécula, poderia ser realizado e reproduzido com precisão muito superior. Considerando que uma definição de alta exatidão para a unidade de tempo do Sistema
Internacional, o segundo, é indispensável para satisfazer às exigências da alta metrologia,
a 13a CGPM (1967) decidiu substituir a definição do segundo pela seguinte:
“O segundo é a duração de 9.192.631.770 períodos da radiação correspondente à
transição entre os dois níveis hiperfinos do estado fundamental do átomo de césio
133.”
Na sessão de 1997, o Comitê Internacional confirmou que: “Essa definição se refere a um
átomo de césio em repouso, a uma temperatura de 0 K.”
“ADT-MF” — 2005/11/7 — 8:51 — page 383 — #383
9.5. Sistema de unidades mecânicas
Observação Na definição original da Academia de Ciências de Paris em
1799, após a revolução francesa, o metro era a décima milionésima parte da
distância do equador ao pólo norte passando por Paris; com métodos mais precisos de medição, verificou-se posteriormente que a distância registrada no objeto conservado em Sèvres era cerca de 10 cm menor que a definição do metro.
Ora, é claro que em todas as tabelas, livros, etc., onde figurassem grandezas
derivadas do metro, usava-se a distância entre os 2 traços do objeto conservado em Sèvres. Desse modo, seria muito mais simples mudar a definição do
metro do que alterar a distância dada pelo “objeto”. Por isso, o metro passou a
ser definido como “a distância entre 2 traços a 0 ◦ C do padrão conservado em
Sèvres”. Mais recentemente a definição do metro foi alterada para a forma do
rodapé 14 deste capítulo.
9.5.3.1
Definição da unidade de massa
Analogamente a unidade de massa definida pelos revolucionários franceses
era “a massa de um decímetro cúbico de água destilada a 4 ◦ C ”. A água é
uma substância universal, podendo ser obtida em qualquer lugar da Terra e
facilmente purificada, e apresenta um máximo de densidade a 4 ◦ C, por isso
foi escolhida essa substância nessa temperatura para a definição do padrão de
massa. Para facilitar o uso do padrão assim definido foi construída uma réplica,
constituída por um cilindro de platina iridiada, liga com 90 % de platina e 10 %
de irídio, com 39 mm de altura e 39 mm de diâmetro.
9.5.3.2
Definição da unidade de força no sistema métrico
No sistema métrico o padrão de força é o quilograma-força, o qual seria o peso
de um objeto padrão em Paris e ao nível do mar. Nada mais cômodo que esse
objeto fosse o próprio padrão de massa, isto é, o quilograma massa. Assim o
kg seria o peso do cilindro de platina iridiada conservado no Bureau Internacional de Pesos e medidas, em Paris e ao nível do mar. Essa definição também
foi mudada para “1 kgf é o peso de uma massa de 1 kg num lugar da Terra
em que a aceleração da gravidade é g0 = 9,806.65 m/s2 ”. Essa aceleração da
gravidade se denomina aceleração normal da gravidade terrestre; no sistema
inglês FPS tem o valor de 32,174 ft/s2 . Costuma-se aproximar esses valores
para 9,81 m/s2 , 9,8 m/s2 ou mesmo 10 m/s2 e 32,2 ft/s2 ou 32 ft/s2 .
O sistema métrico foi legalizado no Estados Unidos pelo Metric Act de
1866, o qual incluiu também os equivalentes entre os sistemas métrico e o
383
“ADT-MF” — 2005/11/7 — 8:51 — page 384 — #384
384
Capítulo 9. Dinâmica
inglês, a definição legal de libra massa é dada em função do quilograma massa: 15 1 kg = 2,2046 lb.
O Brasil é membro da Convenção do Metro desde 1875. Pelo decreto lei
no 240 de 28 de fevereiro de 1967 tornou-se obrigatório o uso das unidades de
medir baseadas no Sistema Internacional de Unidades aprovadas nas Conferências Gerais de Pesos e Medidas. Esse decreto lei incumbiu o Instituto Nacional
de Pesos e Medidas (INPM) da execução, supervisão, orientação, coordenação
e fiscalização da legislação. 16
9.5.4
9.5.4.1
Problemas simples com o uso das unidades
Sistemas MLT
Problema 9.1. Um corpo tem uma massa de 100 kg, sob a ação de uma força
F ele adquire a aceleração de 2 m/s2 . Qual o valor de F?
As unidades dadas são no sistema MKS, logo, usando-se a equação F = ma,
tem-se:
F = 100 kg × 2 m/s2 = 200 kg · m s−1 = 200 N,
pois 1 N = 1 kg m s−1 , veja definição do newton.
Problema 9.2. Uma força de 1000 dyn atua sobre um corpo de 100 g. Qual a
aceleração que ele adquire?
As unidades do problema são do sistema CGS, logo F = ma, donde 1000 dyn =
2
100 g × a, portanto a = 10 ( dyn
g ), como no CGS 1 dyn = (1 g)×(1 cm/s ) donde
1 dyn/g = 1 cm/s2 , portanto a = 10 cm/s2 .
Problema 9.3. Um corpo tem massa de 50 lb e sob a ação de uma força F ele
adquire a aceleração de 100 ft/s2 . Qual a força F?
Temos F = ma, portanto F = 50 lb × 100 ft/s2 = 5000 pdl, pois 1 pdl = 1 lb ft/s2 ,
veja definição.
15
u
O SI está sendo implantado nos Estados Unidos, sob a coordenação do NIST, cf.
[29, 30].
16
u
Essa incumbência está atualmente (2005) com o INMETRO, cf. [3].
“ADT-MF” — 2005/11/7 — 8:51 — page 385 — #385
9.5. Sistema de unidades mecânicas
9.5.4.2
Sistemas FLT
Problema 9.4. Um corpo sob a ação de uma força de 20 kgf adquire a aceleração de 10 m/s2 . Qual a sua massa?
Temos F = ma, portanto 20 kgf = m × 10 m/s2 , donde m = 2 kgf/(m/s2 ) = 2 umt,
pois 1 umt = 1 kgf/(m/s2 ), veja definição.
Problema 9.5. Um corpo tem massa de 20 slug. Qual a força que lhe imprime
a aceleração de 20 ft/s2 ?
Temos F = ma, portanto F = 20 slug × 20 ft/s2 = 400 slug ft/s2 = 400 lf ∗ .
9.5.4.3
Relação entre as unidades
Problema 9.6. Qual a relação entre o newton e o dina?
Temos F = ma, portanto 1 N = 1 kg × 1 m/s2 , mas 1 kg = 103 g e 1 m =
10 cm, donde
2
1 N = 103 g × 102 cm/s2 = 105 g cm/s2 = 105 dyn ,
pois 1 g × 1 cm/s2 = 1 dyn.
Problema 9.7. Sabendo-se que a aceleração que um corpo de 1 kg de massa
adquire sob a ação da força de 1 kgf é de 9,80665 m/s2 , achar a relação entre
o quilograma-força e o newton.
1 kgf = 1 kg × 9,80665 m/s2 = 9,80665 kg m/s2 = 9,80665 N
≈ 9,8 N ≈ 10 N
1
kgf ≈ 100 gf.
9,80665
Problema 9.8. Qual a relação entre a unidade técnica de massa e o quilograma massa?
Observe que 1 N =
Problema 9.9. Qual a relação entre a o quilograma-força e o dina, e entre
grama-força e o dina?
Os sistemas incoerentes
Os sistemas incoerentes são aqueles em que as quatro unidades fundamentais,
a saber: unidade de massa, de força, de comprimento e de tempo são definidas independentemente, sem a obedecer a equação F = ma. Daí resulta que a
equação fundamental da dinâmica se torna F = κma, com o coeficiente κ , 1.
385
“ADT-MF” — 2005/11/7 — 8:51 — page 386 — #386
386
Capítulo 9. Dinâmica
Exemplo O exemplo mais comum é aquele em se toma para unidade de força
o quilograma-força, para unidade de massa o quilograma (massa), a unidade
de comprimento sendo o metro e a de tempo o segundo. Resulta muitas vezes
da confusão entre os sistemas MKS e o Métrico Técnico.
No sistema Métrico Técnico a unidade de força é o quilograma-força (kgf),
que é a força com que a Terra atrai para o seu centro um dado objeto padrão,
num lugar em que a aceleração é a aceleração normal, g0 = 9,806.65 m/s2 . Ora,
esse objeto é o próprio cilindro de platina iridiada que é tomado como o padrão
do quilograma (de massa), kg. Daí resulta que esse objeto tem massa de 1 kg e
o peso de 1 kgf no local onde a aceleração da gravidade é g0 . Por conseguinte,
um corpo que tenha a massa de 70 kg, num lugar em que a aceleração da gravidade é g0 , terá o peso de 70 kgf. Portanto o número que mede a massa em kg
é o mesmo que mede o peso em kgf, desde que o corpo esteja num lugar em
que a aceleração da gravidade seja g0 . A aceleração adquirida pelo corpo sob
a ação de seu peso pe g0 , logo teremos pela equação F = κ m a:
1 kgf = κ 1 kg × 9,806.68 m/s2 = κ 9,806.68 kg m/s2
Donde, fazendo γ0 = 9,806.68 (grandeza adimensional),
κ=
1 kgf s2
×
γ0 kg
m
A equação F = κ m a se torna:
(
F=
)
1 kgf s2
ma .
γ0 kg m
Problema 9.10. Qual a aceleração adquirida por um corpo cuja massa é de
100 kg e está sob a ação de uma força (constante) de 200 kgf?
Resolva o mesmo problema nos sistema MKS e Métrico Técnico.
9.5.4.4
A unidade SI de tempo
A unidade (SI) de tempo é o segundo, símbolo s. O segundo é definido a partir
do dia solar médio, que corresponde a 24 horas, cada hora com 60 minutos e
cada minuto com 60 segundos, o que perfaz o total de 24×60×60 segundos,
1
ou 86400 s. Deste modo o segundo era definido como sendo 86400
do dia solar médio. O dia solar sendo o intervalo de tempo necessário para que o Sol
“ADT-MF” — 2005/11/7 — 8:51 — page 387 — #387
9.6. A máquina de Atwood
passasse por um dado ponto do Céu duas vezes consecutivas devido ao movimento de rotação da Terra. Há flutuações do período de rotação da Terra,
dando uma imprecisão de uma parte em 108 . Por isso mudou-se a definição
do segundo, definindo-o a partir do período de vibração de elétrons no átomo
de Césio, o que dá uma precisão de uma parte em 1011 . O segundo é assim
definido em função da transição dos elétrons entre os dois níveis hiperfinos do
estado fundamental de Césio, ou mais precisamente:
Um segundo é a duração de 9.192.631.770 períodos da radiação correspondente à transição entre 2 níveis hiperfinos do estado fundamental do
átomo de césio 133.
Definição essa ratificada plea 13a Conferência Geral de Pesos e Medidas de
1967.
9.6
A máquina de Atwood
A máquina de Atwood é um aparelho inventado por George Atwood (1745–
1807), matemático britânico, o qual é lembrado principalmente por esse invento.
Esse aparelho é representado na Fig. 9.7, na sua versão do Estojo de Mecânica, usado na UERJ. Consiste basicamente numa roldana fixa 1 (veja Fig. 9.7,
pág. 390), isto é, numa roldana fixada a um eixo em torno do qual pode girar, o
eixo é fixado por sua vez ao suporte 2 que sustenta o anel 3, que é fixado à base
4. Um fio muito fino flexível A passa pelo sulco da roldana, tendo fixadas nas
extremidades duas massas: m1 e m2 . Na Fig. 9.7, a posição das massas é a seguinte: a massa m1 está em repouso no chão; a massa m2 está suspensa sobre o
anel. Sobre a massa m2 está um fio (metálico) B de peso ~p, cujo comprimento
é maior que o diâmetro do anel 3, as massas m1 e m2 são aproximadamente
iguais e o sistema formado por elas fica em equilíbrio em qualquer posição.
O fio B sobra a massa m2 acrescenta o seu peso ~p à massa m2 , sendo portanto
uma força de puxa a massa m2 para baixo, deslocando o sistema formado pelo
fio A e melas massas m1 e m2 em suas extremidades. Deste modo a massa m2
desce enquanto a massa m2 sobre (quando se solta m1 do repouso no chão do
laboratório), a força que provoca assim um movimento acelerado do sistema é
o peso ~p do fio B. Ao passar pelo anel 3 o fio B é retirado pelo anel, de modo
que o movimento passa a ser uniforme e retilíneo; a massa m2 , com velocidade v que atingiu ao passar pelo anel 3 quando o fio foi retirado, continua em
387
“ADT-MF” — 2005/11/7 — 8:51 — page 388 — #388
388
Capítulo 9. Dinâmica
movimento retilíneo e uniforme de velocidade v, constante, até atingir o chão,
tendo então percorrido o segmento L. Veja figuras 9.7, 9.8 e 9.9.
O estudante deve medir o comprimento h, o comprimento L, e o intervalo
de tempo T durante o qual o movimento é uniforme, isto é, desde que o fio B
foi retirado sobre a massa m2 , ao passar pelo anel 3, até que m2 , percorrendo a
distância L, chegue ao chão. O estudante terá assim:
1. o intervalo de tempo T, durante o qual o sistema tem velocidade constante v, percorrendo a distância L; logo L = v T, donde v = L/T;
2. o deslocamento h que ocorre em movimento acelerado com aceleração
a (incógnita), durante o intervalo de tempo t (incógnita);
temos então: v = at e h = 12 at2 ;
3. a velocidade v foi determinado no item 1, portanto, nas equações no
item 2 só temos as incógnitas a e t, duas equações com duas incógnitas;
donde:
v
t=
e
h = 21 at2
a
e pela primeira equação
h = 21 a
v 2
a
v2
,
a
ou
h=
1
2
ou
a=
v2
;
2h
portanto
h=
mas
1
2
v2
,
a
v = L/T, logo
!
1 L2
a=
.
2h T2
O estudante terá assim determinado a aceleração a do sistema me massa m sob
a ação da força F = p. A massa m do sistema é constituída pelas massas m1 ,
m2 , a massa mA do fio A, a massa mB do fio B e a massa da roldana que gira
com movimento acelerado:
m = m1 + m2 + mA + mB +
1
mrold .
2
(9.5)
“ADT-MF” — 2005/11/7 — 8:51 — page 389 — #389
389
9.6. A máquina de Atwood
Observação Vejamos porquê só entra a metade da massa da roldana. Ela
também se acelera, mas com movimento
de rotação acelerado e, neste caso,
,→
,→
a 2a Lei de Newton toma a forma M = Iα, em que α é a aceleração angular
em torno ,→do eixo e I o momento de inércia da roldana em relação ao eixo de
rotação. M é o momento resultante das forças em reação ao eixo, e que provoca
a (aceleração da) rotação da roldana, essas forças são as tensões T e T 0 de um
lado e do outro do fio A. O momento d inércia da roldana, suposta um disco de
massa mrold distribuída uniformemente em seu volume, é
I=
1
mrold R2
2
em que R é o raio da roldana; no cálculo da aceleração da massa m2 , e no qual
se leve em conta a aceleração da roldana, a massa da roldana vai entrar, assim,
apenas com a metade de seu valor 12 mrold , donde (9.5). Quando estudarmos a
dinâmica do corpo rígido teremos oportunidade de demonstrar essa fórmula.
Podemos portanto escrever F = ma, em que
!
1
m = m1 + m2 + mA + mB + mrold .
2
A aceleração ac calculada por essa fórmula será pois ac = mF . Ora, o Estudante
já determinou a aceleração experimentalmente pela equação
aexp =
1 L2
,
2h T2
pode assim comparar os dois resultados, o experimental (aexp ) e o calculado
(ac ) pela equação fundamental da dinâmica, e verificar a discrepância relativa
entre os dois resultados. A discrepância relativa não deve ser superior a 5 %.
Observação O estudante antes de iniciar a verificação da equação fundamental da dinâmica F = ma, deverá familiarizar-se com o uso da Máquina de
Atwood. Há várias causas de erro:
1. o atrito da roldana, o qual deve ser o mínimo possível; o rolimã da roldana deve estar isento de poeira, partículas, etc. que impedem seu movimento, por isso, depois de realizada a experiência, a roldana deve ser
guardada em um saquinho plástico;
2. a roldana deve estar bem balanceada, isto é, deve ser um disco cuja espessura é a mesma em todos so pontos, devendo fiar em repouso quando
“ADT-MF” — 2005/11/7 — 8:51 — page 390 — #390
390
Capítulo 9. Dinâmica
Figura 9.7: Máquina de Atwood montada com o Estojo de Mecânica – UERJ; situação inicial.
“ADT-MF” — 2005/11/7 — 8:51 — page 391 — #391
9.6. A máquina de Atwood
Figura 9.8: Máquina de Atwood; situação em que o fio de peso ~p fica retido no anel.
391
“ADT-MF” — 2005/11/7 — 8:51 — page 392 — #392
392
Capítulo 9. Dinâmica
Figura 9.9: Máquina de Atwood; situação final para as medições.
“ADT-MF” — 2005/11/7 — 8:51 — page 393 — #393
9.6. A máquina de Atwood
Figura 9.10: Balanceamento da roldana para a Máquina de Atwood.
colocada (com velocidade zero) em qualquer posição, isto é, com o eixo
na horizontal, ao girar a roldana de pequenos ângulos e após deixá-la
em repouso, ela deve permanecer em repouso, mostrando não ter mais
massa de um lado do que do diâmetro horizontal do que do outro (veja
Fig. 9.10);
3. observe que na Fig. 9.7 o fio A está no lado esquerdo, enquanto que no
final da experiência está do lado direito 17 ;
4. antes de começar a fazer a experiência procure colocar as massas m1
e m2 em movimento uniforme com a menor velocidade possível, por
exemplo, estando a experiência como na Fig. 9.7, mas se o fio B, dê um
pequeno empurrão par baixo na massa m2 que assim adquire uma velocidade v1 , a massa m2 deve descer até o chão com movimento uniforme,
por menor que seja v1 ; (não exagere)
5. o estudante deve treinar o disparo do cronômetro, que deve ser automático, por reflexo, sem raciocinar: assim que o fio B é retirado pelo anel
3, ele deve acionar o cronômetro; do mesmo modo, assim que a massa
m2 tocar no chão, desligou o cronômetro, simultaneamente, sem pensar;
a massa do fio B pode ser de 150 mg.
Só depois de ter realizado o que vem dito acima é que o estudante passa a
experiência propriamente dita.
9.6.1
Sobre a experiência da verificação da equação da dinâmica
1. A 1a experiência é a que foi citada anteriormente, verificar a equação
F = ma, para uma dada massa m, em que no valor de m se tem m1 =
17
Isso significa que a massa do fio vai passando de um lado para outro, trazendo uma
variação na aceleração a. Como fazer para afastar esse inconveniente?
393
“ADT-MF” — 2005/11/7 — 8:51 — page 394 — #394
394
Capítulo 9. Dinâmica
10 g e m2 = 10 g. O estudante deve fazer 10 determinações do tempo T :
T 1 , T 2 , T 3 . . . T 10 e tirar a média aritmética T m . É esse valor T m que ele
1 L2
. Deve fazer o mesmo com h e L. Aplique
vai levar à equação a = 2h
T2
a teoria dos erros.
2. A 2a experiência será a seguinte: mantendo a força F = p constante e
variando a massa m. Repita a experiência para as massas m1 = m2 = 5 g;
m1 = m2 = 10 g, já feita; m1 = m2 = 15 g; m1 = m2 = 20 g e m1 = m2 = 25 g.
Temos F = ma e a = F/m. Portanto, a aceleração é função linear de 1/m,
deste modo, pondo y = a e x = 1/m, o gráfico deve dar uma reta passando
pela origem (origem essa que corresponde a m = ∞).
3. A 3a experiência consiste em variar a força F: ma = F ⇒ a = m1 F =
κF ; κ = m1 , portanto a aceleração é uma função linear de F. Faça (fio B):
F1 = 50 mgf; F2 = 100 mgf; F3 = 150 mgf; F4 = 200 mgf e F5 = 250 mgf.
Ponha massas m1 = m2 = 20 g para que a aceleração não seja muito
grande, dando muita imprecisão no intervalo de tempo T .
Problemas
Problema 9.11. Um corpo pesa na Lua 20 kgf. Qual o seu peso na Terra?
Temos pL = maL , em que pL é o peso na Lua e aL a aceleração (da gravidade) na Lua, seu valor é aproximadamente 1,6 m/s2 . Donde:
m=
20 kgf
pL
=
= 12,5 utm = 122,5 kg.
aL 1,6 m/s2
Peso na Terra:
pL = maL = mg0 = 12,5 utm × 9,8 m/s2
= 122,5 kgf.
Faça o mesmo problema usando o sistema MKS.
Problema 9.12. Um corpo pesa na Lua 20 kgf, o corpo está sobre uma mesa
horizontal polida (veja Fig. 9.11), aplicando-se-lhe uma força F = 50 N, qual
a sua aceleração? A força F é horizontal.
A massa do corpo já foi calculada 18 para o Probl. 9.11: m = 122,5 kgf
18
Por que a massa tem o mesmo valor numérico que o peso calculado no problema
9.11?
“ADT-MF” — 2005/11/7 — 8:51 — page 395 — #395
395
9.7. Movimento de projéteis
Figura 9.11: Ilustração para o problema 9.12.
O corpo está sobre uma mesa horizontal, veja Fig. 9.11.
~ da mesa sobre o corpo, vertical;
Forças que atuam no corpo: peso m~gL ; força N
~
~
~
~ + m~gL = F.
~ Temos R = ma,
e a força F horizontal. A resultante é R = F + N
donde
R
50 N
a= =
m 122,5 kg
= 0,408 m/s2 .
Tabela 9.2: Aceleração da gravidade em alguns corpos celestes do Sistema Solar.
Sol
Venus
Marte
Saturno
Netuno
274,6 m/s2
8,8 m/s2
3,9 m/s2
11,7 m/s2
9,8 m/s2
Mercúrio
Terra
Júpiter
Urano
Lua
3,9 m/s2
9,8 m/s2
26,4 m/s2
9,8 m/s2
1,7 m/s2
Problema 9.13. Calcule o peso de um corpo cuja massa é de 50 kg nos corpos
celestes listados na Tab. 9.2.
Problema 9.14. Calcule o seu peso nos corpos celestes listados na Tab. 9.2.
Problema 9.15. Se um homem dá um pulo de 2 m de altura na Terra, a que
altura pulará nos corpos celestes listados na Tab. 9.2?
9.7
Movimento de projéteis
Um corpo lançado sobre a superfície da Terra se denomina projétil, do verbo
projetar, plural: projéteis. Algumas vezes se usa o termo projetíl, do francês
“ADT-MF” — 2005/11/7 — 8:51 — page 396 — #396
396
Capítulo 9. Dinâmica
projectile, o qual está em desuso. São exemplos de projéteis: uma pedra jogada
à distância, uma bala de revólver atirada num alvo, uma bala de fuzil disparada
num alvo, uma bomba lançada sobre um navio, uma bola de futebol chutada
em gol, uma bola de beisebol arremessada contra o batedor.
Suponhamos um projétil C lançado de um ponto sobre a superfície da Terra com uma velocidade ~v0 que faz um ângulo θ em relação ao plano horizontal.
Veja Fig. 9.12. Uma primeira pergunta que surge é: Qual a trajetória do projétil?
Figura 9.12: Projétil lançado com velocidade ~v0 que faz um ângulo θ com o plano
horizontal.
Para estudarmos o movimento de um projétil fazemos algumas simplificações:
1. o atrito com o ar é desprezado, bem como o empuxo do ar e o movimento
de massas de ar (vento);
2. o movimento da Terra também é desprezado, tendo em vista que a velocidade do corpo e sua trajetória são pequenas, podemos assim tomar um
sistema de eixos ligados à Terra no local do disparo como um sistema
inercial;
3. a aceleração da gravidade no local onde o corpo se move é constante
em valor numérico e em direção, o campo gravífico é ao longo de toda
trajetória do corpo é suposto paralelo e de mesmo valor numérico g;
4. as dimensões do projétil são desprezadas, isto é, o projétil é considerado
uma partícula.
Posto isto, tomemos um sistema de eixos Oxy, em que o plano Oxy é ortogonal
ao plano horizontal H, e a origem O coincide com o ponto donde sai o corpo
com velocidade ~v0 , o eixo x sendo horizontal sobre H e o eixo y vertical. A
aceleração da gravidade terá portanto a direção do eixo y em toda a trajetória
do corpo (projétil), mas seu sentido será contrário ao eo eixo y, veja Fig. 9.13.
O corpo a partir do ponto O fica sujeito à aceleração da gravidade, isto é, à sua
“ADT-MF” — 2005/11/7 — 8:51 — page 397 — #397
397
9.7. Movimento de projéteis
Figura 9.13: Sistema de coordenadas Oxy usada para o estudo do movimento de um
projétil lançado com velocidade inicial ~v0 .
~ = m~g = −mg ̂, única força a atuar sobre ele, já que todas as outras
força peso P
possíveis forças foram desprezadas. A resultante das forças externas sobre o
corpo é igual a sua força peso P = mg, vertical de sentido contrário ao eixo y e
mesma direção. É fácil ver que as equações paramétricas da trajetória são:
x = v x0 t
y = vy0 t − 12 g t2
tendo-se v0 = |~v0 | e
v x0 = v0 cos θ
vy0 = v0 sen θ .
Quais são as variáveis ou características do movimento do projétil e que nos
interessam conhecer? Seriam:
a) o ponto P0 por onde o projétil vai novamente passar pelo plano horizontal, isto é, a distância da origem O ao ponto P0 , distância essa que se
denomina alcance;
b) a altura máxima h que o corpo atinge em sua trajetória;
c) o ponto P de coordenadas (x,y) para um dado instante t;
d) o ângulo θ, ou elevação θ para que ele atinja o ponto P;
e) o alcance máximo para a velocidade ~v0 com que o corpo é lançado em
função do ângulo de elevação θ.
“ADT-MF” — 2005/11/7 — 8:51 — page 398 — #398
398
Capítulo 9. Dinâmica
A ciência que trata de todas as questões relativas ao movimento de projéteis se denomina Balística. O caso aqui figurado é o exemplo mais simples a
ser tratado na Balística, uma primeira complicação surge quando se levar em
conta o atrito do ar, em seguida a influência do vento, a variação de g, a influência do movimento de rotação da Terra, da sua translação. Os problemas
se complicam, bem como suas soluções. O projétil pode ter sua própria propulsão e nesse caso se denomina foguete, ou projétil balístico. O projétil balístico
pode ser um engenho, isto é, um aparato ou máquina, lançado com a finalidade
de atingir um alvo, e neste caso toma o nome míssil, plural: mísseis. O míssil
balístico só tem propulsão na fase inicial, cessada a qual ele continua sujeito
à gravidade, pode também ser teleguiado quando contém dispositivos capazes
de corrigir a sua trajetória durante o vôo. A Balística adquiriu notável avanço
com os recursos advindos dos computadores ultra sofisticados e rápidos, e com
o desenvolvimento da navegação inercial.
...
19
O Brasil pode dar sua contribuição formando jovens cientistas que poderão
ingressar nesse mercado de trabalho. Muitos brasileiros têm migrado para a
França, Inglaterra, Estados Unidos, etc. e nesses países para onde se dirigem
conseguem boas condições de trabalho científico e remuneração adequada. Por
isso mesmo o governo do Brasil está procurando também valorizar o cientista
brasileiro, incentivando a carreira científica e melhorando suas condições de
trabalho. Resulta de tudo isso que o profissional pesquisador competente, doutor em Física, Química, Engenharia, etc., será [. . . ] amplamente valorizado no
mundo inteiro. É preciso porém considerar que o início da carreira científica
se encontra no 1o semestre do 3o ciclo (sic), quando o jovem entra para a Universidade, ele deverá assim capacitar-se de que está ingressando numa carreira
que o preparará para um mercado extremamente competitivo e no qual sua
apresentação e recomendação é o seu desempenho nos cursos Universitário,
de mestrado, doutorado e posteriormente no trabalho científico, registrado em
Revistas Científicas, Livros, Congressos, etc.
19
u No original datilografado pelo Prof. Armando se segue a importância militar dos mís
seis à época da Guerra Fria, ogivas nucleares, projeto Guerra nas Estrelas, e outras questões
internacionais. Essas palavras nós não transcrevemos aqui. O original termina com as palavras
que se seguem transcritas.
“ADT-MF” — 2005/11/7 — 8:51 — page 399 — #399
Capítulo 10
Centro de massa ∗
Vamos desenvolver agora um conceito muito importante em Física, que é o
conceito de centro de massa de um corpo, ou de um sistema de partículas.
Inicialmente, para simplificar, vamos tomar um sistema de 3 partículas, o que
em nada restringirá a conceituação no que será exposto.
Para determinar a posição das partículas m1 , m2 e m3 , tomemos um sistema
cartesiano ortogonal Oxy, jacente ao plano das partículas. Elas reagem entre si
com forças cujas causas são várias, mas seja qual for o fenômeno Físico que
origine essas forças de interação, essas forças obedecerão a 3a Lei de Newton,
exemplo: força de atração ou repulsão elétricas ou magnéticas; atrito; colisão; e atração gravitacional. Nestes casos as forças de interação terão sempre
a mesma reta suporte. Entretanto, quando essas forças são eletromagnéticas,
por exemplo: duas partículas carregadas eletricamente com cargas q1 e q2 e
velocidades ~v1 e ~v2 , respectivamente, interagem entre si com forças de mesma
intensidade, sentidos contrários e paralelas, não tendo, porém, a mesma reta
suporte; mas ainda vale o que vai ser desenvolvido aqui, pois as forças de interação terão soma nula: f~ + f~0 = ~0. Observe-se entretanto que o momento
dessas forças em relação a um ponto (qualquer) não é zero, pois constituem
um binário.
Suponhamos agora que se apliquem forças externas F~i (i ∈ {1, 2, 3}) sobre
o sistema de partículas. Para fixar idéias, suponhamos como na Fig. 10.1 que
F~i se aplique sobre a partícula mi . Observe que o tipo de interação sendo qualquer, poderíamos supor, por exemplo, m2 ligada rigidamente a m3 por um fio
rígido, sem massa, e a força F~3 aplicada ao fio, e não diretamente sobre m3 ; o
∗
u O material deste Capítulo é composto da cópia xerox de texto inédito datilografado
pelo autor, retirado do arquivo pessoal do Prof. Joaquim Pereira Neto.
399
“ADT-MF” — 2005/11/7 — 8:51 — page 400 — #400
400
Capítulo 10. Centro de massa
Figura 10.1: Centro de massa de um sistema formado por três partículas.
raciocínio aqui desenvolvido ainda valeria, apenas um pouco mais complicado.
As forças externas sendo indicada com F maiúsculo.
Apliquemos a 2a Lei de Newton às partículas (do sistema), para isso isolemos mi e façamos a seguinte convenção denotar as forças internas: se a força
atua sobre a partícula mi , o seu primeiro índice será i e o segundo índice o
da partícula que exerceu a força, j por exemplo; assim f~i j é a força (interna)
que atua sobre a partícula mi pela interação produzida pela partícula m j . Deste
modo, sobre a partícula m1 vão atuar as forças f~12 , f~13 e F~1 , veja Fig. 10.1.
~ 1 = f~12+ f~13+F~1 a partícula m1 apresenta a aceleração
Sob a ação da resultante R
a
~a1 ; pela 2 Lei de Newton:
~ 1 = f~12 + f~13 + F~1
R
(10.1a)
O mesmo vale para as outras duas partículas, podemos as equações análogas:
~ 2 = f~21 +
R
~ 3 = f~31 +
R
f~23 + F~2
f~32 + F~3
(10.1b)
(10.1c)
~1, R
~2 e R
~3
Observe-se que, isolando-se as partículas m1 , m2 e m3 , as forças R
são as resultantes de todas as forças que atuam sobre cada uma das partículas,
produzindo-lhes acelerações ~a1 , ~a2 e ~a3 , as forças f~i j ({i, j} ∈ {1, 2, 3}) sendo
também forças externas (para o sistema formado apenas pela partícula mi e
~ i ). Somente quando se considera o conjunto das três parsujeita à resultante R
tículas é que elas passam a forças internas. Como porém se toma o conjunto
das três partículas? Somemos as equações (10.1), termos:
~ = m1 ~a1 + m2 ~a2 + m3 ~a3 ,
R
(10.2)
“ADT-MF” — 2005/11/7 — 8:51 — page 401 — #401
401
~ é a resultante das forças externas F~1 , F~2 e F~3 , tendo em vista que as
em que R
somas dos pares f~12 + f~21 ; f~13 + f~31 e f~13 + f~31 resultam nulas, pois vale a 3a Lei
de Newton.
Vemos deste modo que, se as forças de interação entre as partículas de
um sistema obedecem à 3a Lei de Newton, elas darão resultante nula sobre o
sistema formado com essas partículas. Tais forças se denominam forças internas ao sistema: como as interações obedecem à 3a Lei de Newton, elas darão
sempre resultante nula, mesmo no caso em que a interação é eletromagnética.
A equação (10.2) contém quatro variáveis, teremos de conhecer três para
determinar a 4a , deste modo, tomada isoladamente a (10.2) será de pouco valor
para nós.
Entretanto, podemos desenvolver um conceito que torna a equação (10.2)
extremamente útil. Com efeito, vamo definir um ponto denominado centro de
massa do sistema e no qual vamos considerar concentrada toda a massa do
sistema:
3
X
m1 + m2 + m3 =
mi ,
i=1
~ nele aplicada. Sob a ação da força R,
~ o centro de
e a força resultante externa R
a
massa (CM) adquirirá uma aceleração ~aCM dada pela 2 Lei de Newton:
X ~
R = (m1 + m2 + m3 ) ~aCM =
mi ~aCM .
i
Deste modo a (10.2) se torna:
X X
~=
R
mi ~aCM =
mi~ai .
i
i
Donde
X
~aCM = Xi
mi~ai
i
mi
.
(10.3)
Para mostrar que esse ponto existe, basta determinar pelas (10.3) as suas coordenadas (xCM , yCM ), isto é: ~rCM = xCM ı̂+yCM ̂ é o raio vetor do CM.
Ora, já vimos que a aceleração de uma partícula é a derivada segunda em
relação ao tempo do vetor posição:
~a =
d2~rCM
d2~r
~
,
logo
a
=
CM
dt2
dt2
e ~ai =
d2~ri
dt2
i ∈ {1, 2, 3} .
“ADT-MF” — 2005/11/7 — 8:51 — page 402 — #402
402
Capítulo 10. Centro de massa
Ora, a derivada da soma é igual à soma das derivadas das parcelas
d2
d2
d2
~
~
~r3
r
+
r
+
1
2
dt2
dt2
dt2
d2
= 2 ~r1 + ~r2 + ~r3 ,
dt
~a1 + ~a2 + ~a3 =
e como as massas são constantes:
m1~a1 + m2~a2 + m3~a3 =
d2
m1~r1 + m2~r2 + m3~r3
2
dt
e portanto:
d2
m1~r1 + m2~r2 + m3~r3
2
dt
d2
= 2 m1~r1 + m2~r2 + m3~r3 .
dt
(m1 + m2 + m3 ) ~aCM =
(m1 + m2 + m3 )
d2~rCM
dt2
Essa igualdade será satisfeita se colocarmos:
(m1 + m2 + m3 )~rCM = m1~r1 + m2~r2 + m3~r3
m1~r1 + m2~r2 + m3~r3
ou ~rCM =
m1 + m2 + m3
Ou de um modo geral
X
~rCM = Xi
mi~ri
i
mi
.
O raio vetor do centro de massa será definido, portanto 1 , como a média ponderada dos raios vetores das partículas (que constituem o sistema), o peso nessa
média sendo a massa de cada partícula.
As partículas podem se distribuir no espaço de três (3) dimensões, e nesse
caso o raio vetor terá três componentes: xi , yi e zi , cada uma correspondendo a
uma dimensão, deste modo:
~rCM = xCM ı̂ + yCM ̂ + zCM k̂
X
mi xi ı̂ + yi ̂ + zi k̂
i
X
=
.
mi
(10.4)
i
1
u
Observe-se como, sutilmente, generaliza-se n = 3 para um n genérico, n ∈ N.
“ADT-MF” — 2005/11/7 — 8:51 — page 403 — #403
403
10.1. Distribuição contínua de massa
Donde obteremos as seguintes igualdades:
X
X
mi x i
mi yi
xCM = Xi
;
yCM = Xi
;
mi
mi
i
X
zCM = Xi
i
mi zi
i
mi
.
(10.5)
Explique essas igualdades a partir de (10.4).
10.1
Distribuição contínua de massa
Se tivermos uma distribuição contínua de massa, dividimos a massa m em elementos de massa dm, de raio vetor ~r e a coordenada do centro de massa será
dada pelas fórmulas:
R
R
~r dm
~r dm
m
~rCM = R
= m
,
(10.6)
m
~
r
dm
m
pois as soma de todos elementos de massa dm é a massa total m. Analogamente
teremos:
R
R
R
y dm
z dm
x dm
m
m
yCM =
zCM = m
.
(10.7)
xCM =
m
m
m
10.1.1
Massa específica
Suponhamos que a massa de um volume ∆v seja ∆m. Denomina-se massa
específica media no volume ∆v à razão
µm =
O limite
µ = lim
∆v→0
∆m
.
∆v
∆m dm
=
∆v
dv
se denomina massa específica volumétrica por unidade de volume ou densidade calculada num ponto do corpo. A massa específica volumétrica é a massa
por unidade de volume calculada num ponto do corpo.
O elemento de massa dm expresso em função da massa específica no volume dv será: dm = µ dv (cf. Fig. 10.2).
Observe-se que µ pode variar de um ponto para outro no volume V do
corpo, sendo nesse caso função das coordenadas do ponto. De qualquer modo
“ADT-MF” — 2005/11/7 — 8:51 — page 404 — #404
404
Capítulo 10. Centro de massa
Figura 10.2: Centro de massa de um sistema formado por distribuição contínua de
massa.
se tem:
R
V
xCM = R
xµ dv
µ dv
V
R
,
V
yCM = R
zµ dv
µ dv
V
R
zCM = RV
,
zµ dv
µ dv
V
.
Se a massa específica é constante para todos os pontos do corpo, então
pode-se passar µ para fora do sinal de integração, tanto no numerador como no
denominador das frações acima, e assim teremos:
R
V
xCM = R
V
x dv
dv
R
,
yCM = R
V
z dv
V
µ dv
R
,
zCM = RV
V
z dv
dv
.
Determina-se deste modo um ponto associado ao volume V do corpo, o qual se
denomina centro do volume V, ou centróide de V. O centróide de V coincidirá
com o centro de massa, se a massa se distribui uniformemente no volume V.
10.1.2
Centro de gravidade de um corpo
Já definimos o centro de gravidade de um corpo pelas expressões: (§4.6, pág. 202)
R
xCG = R
x dp
dp
R
= R
µgx dv
µg dv
,
“ADT-MF” — 2005/11/7 — 8:51 — page 405 — #405
405
10.1. Distribuição contínua de massa
R
yCG = R
R
zCG = R
y dp
dp
z dp
dp
R
= R
R
= R
µgy dv
µg dv
µgz dv
µg dv
,
,
em que dp = π dv = µg dv, π se denomina peso específico do corpo. Vemos
que se a aceleração da gravidade g é constante para todos os pontos do corpo,
ela pode simplificar-se nas integrais das frações, e nesse caso o centro de gravidade coincidirá com o centro de massa do corpo. Ainda mais se a massa
específica do corpo for constante em todos os seus pontos, ela pode ser simplificada nas frações que definem as coordenadas do centro de massa e nesse
caso ele coincidirá com o centróide do volume do corpo.
Resumindo, podemos dizer que um corpo possui os seguintes pontos notáveis:
1o ) Centróide ou centro do volume do corpo, definido pelas integrais:
R
~rCV = R
~r dv
dv
R
x dv
xCV = R
dv
R
y dv
yCV = R
dv
R
z dv
R
z
=
CV
dv
2o ) Centro de massa do corpo, definido por:
R
µ~r dv
~rCM = R
dv
R
µ x dv
xCM = R
µ dv
R
µ y dv
yCM = R
µ dv
R
µ z dv
zCM = R µ dv
Se a massa específica µ é constante, o centro de massa coincide com o centróide do corpo.
“ADT-MF” — 2005/11/7 — 8:51 — page 406 — #406
406
Capítulo 10. Centro de massa
3o ) Centro de gravidade do corpo, definido por:
R
~rCG = R
R
µ g x dv
xCG = R
µ g dv
R
µ g y dv
R
y
=
CG
µ g dv
R
µ g z dv
zCG = R µ g dv
µ g~r dv
µ g dv
Se g é constante em todos os pontos do corpo, g pode simplificar-se nas frações
e neste caso o centro de gravidade coincidirá com o centro de massa do corpo.
Se µ for constante, o centro de massa coincidirá com o centróide, e assim os
três centros coincidirão.
10.1.2.1
Massas específicas superficial e linear
Além da massa específica volumétrica µ, define-se a massa específica superficial e a massa específica linear. Seja uma superfície S , tomemos um elemento
qualquer de superfície ∆S , e suponhamos que a massa contida neste elemento
∆S seja ∆m. A massa específica superficial média nesse elemento de superfície será:
∆m
,
σm =
∆S
isto é, é a massa por unidade de superfície no elemento ∆S . Se P é um ponto
de ∆S , então:
∆m
dm ,
σ = lim
=
∆S →P ∆S
dS P
dizemos que σ é a massa específica superficial calculada no ponto P.
Analogamente, se tivermos uma distribuição de massa ao longo de uma
linha e dado o elemento ∆L da linha, se ∆m é a massa contida em ∆L, então a
massa linear média do elemento ∆L é:
ρm =
∆m
∆L
e se P é um ponto de ∆L, então:
dm ∆m
=
ρ = lim
∆L→P ∆L
dL P
“ADT-MF” — 2005/11/7 — 8:51 — page 407 — #407
407
10.1. Distribuição contínua de massa
é a massa específica linar calculada em P, ou é a massa por unidade de comprimento calculada no ponto P.
10.1.2.2
Exemplos
1o ) Uma barra de comprimento L = 100 cm tem massa específica linear ρ
constante. Pede-se determinar o seu centro de massa.
Solução O elemento de massa num ponto (na vizinhança do ponto) genérico
P é: (veja Fig. 10.3)
dm = ρ dx
portanto, o centro de massa da barra é:
RL
xCM = R0 L
0
x dm
dm
RL
= R0 L
0
xρ dx
ρ dx
=
1
2
L
ρ x2 0
ρ x|0L
=
1
2
ρ L2
=
ρL
1
2
L,
assim, se a massa específica é constante, o centro de massa da barra está no
meio da barra homogênea.
Figura 10.3: Elemento de massa na vizinhança do ponto P em uma barra homogênea.
2o ) Uma barra tem massa específica ρ = ρ0 +κx, em que x é a abscissa com
origem na extremidade A da barra e a direção coincide com o eixo da barra.
1
Determine seu centro de massa, sabendo-se que ρ0 = 1 g/cm e κ = 20
g/cm2 . O
comprimento da barra é 100 cm.
Solução Denotando L = 100 cm:
RL
(ρ0 + κ x) x dx (1/2)ρ0 L2 + (1/3)κL3
xCM = R0 L
= 61,9 cm.
=
ρ0 L + (1/2)κL2
(ρ0 + κ x) dx
0
“ADT-MF” — 2005/11/7 — 8:51 — page 408 — #408
408
Capítulo 10. Centro de massa
Muitos exercícios e problemas podem ser elaborados supondo-se diferentes funções para exprimirem a massa específica superficial σ e a massa específica linear ρ, os quais redundam fundamentalmente em exercícios e problemas
de Cálculo Integral; a Física se reduzindo ao uso correto das constantes físicas,
de modo que, no cálculo final, a massa e as coordenadas (cartesianas) sejam
dadas em unidades de massa e de comprimento, respectivamente.
Questionário, exercícios e problemas
1o ) Que é sistema de partículas?
É um conjunto de partículas tomado separadamente do restante do Universo, com o qual pode interagir ou não, a interação pode efetuar-se como
outro ou outros sistemas de partículas.
2o ) Que é força interna em um sistema de partículas?
É a força de interação entre partículas de um mesmo sistema de partículas.
3o ) Como são as forças internas de um sistema de partículas?
São forças que surgem aos pares, ação e reação, e que obedecem a 3a Lei
de Newton.
4o ) Qual a resultante das forças internas de um sistema de partículas?
A resultante das forças internas é nula, tendo em vista que surgem aos
pares e seguem à 3a Lei de Newton.
5o ) Que são forças externas sobre um sistema de partículas?
São forças exercidas pelo resto do Universo sobre as partículas do sistema
considerado, ou exercidas por partículas de outro sistema de partículas sobre o
sistema dado.
6o ) Como varia a resultante das forças externas sobre o sistema de partículas?
A resultante das forças externas é obtida pela regra do paralelogramo, somando-se as forças externas que atuam sobre cada partícula do sistema, podendo assumir qualquer direção com qualquer intensidade, desde o valor zero.
“ADT-MF” — 2005/11/7 — 8:51 — page 409 — #409
409
10.1. Distribuição contínua de massa
7o ) Onde atuam as forças de reação às forças externas?
Atuam sobre as partículas de outro sistema de partículas, ou sobre o resto
do Universo, por isso não são consideradas entre as forças que atuam sobre as
partículas do sistema, como o é óbvio.
8o ) Que é o centro de massa de um sistema de partículas?
É um ponto geométrico associado ao sistema em que se considera conP
centrada toda a massa do sistema mCM = ni=1 mi , em que n é o número de
~ das forpartículas do sistema, e no qual se considera atuando a resultante R
Pn ~
~
~
ças externas sobre o sistema: R = i=1 Fi , em que Fi é a resultante das forças
externs que atuam sobre a partícula i do sistema. 2
9o ) Qual a aceleração do centro de massa do sistemas?
A aceleração ~aCM do centro de massa do sistema é obtida calculando-se a
mesma pela aplicação da 2a Lei de Newton, já que a massa do centro de massa
P
~ = Pn F~i , isto é,
é mCM = ni=1 mi , e a força que atua sobre ele é R
i=1
~aCM
Pn ~
~
Fi
R
= Pni=1
=
.
mCM
i=1 mi
A aceleração do centro de massa é obtida dividindo a resultante das forças
externas sobre o sistema pela massa total do sistema.
10o ) Se as forças externas aplicadas sobre o sistema se reduzem a um binário
ou conjugado, que acontece?
Se a resultante das forças externas aplicadas sobre o sistema se reduz a um
~ é nula, logo o centro de massa
binário, então a resultante das forças externas R
fica parado ou em movimento retilíneo uniforme (~aCM = ~0 ), o portanto o sistema gira em torno do centro de massa com movimento de rotação acelerado.
11o ) Se a força externa se reduz a uma força F~ aplicada fora do centro de
massa de um corpo rígido, que acontece?
Para responder a essa pergunta, apliquemos ao centro de massa do sis~ de
tema, um sistema nulo de forças, constituído por uma força F~ 0 paralela a F,
0
0
0
mesma intensidade e mesmo sentido, e outra −F~ ; deste modo F~ +(−F~ ) = ~0
2
u Quando se considera o sistema reduzido ao seu centro de massa, não se tem acesso a
situações de deformações e rotações do sistema.
“ADT-MF” — 2005/11/7 — 8:51 — page 410 — #410
410
Capítulo 10. Centro de massa
no centro de massa, o que não altera o sistema anterior, isto é, a força F~ aplicada fora do centro de massa. Consideremos agora a força −F~ 0 e a força F~ 0
~ aplicada no centro de
que vão constituir um binário, e a força F~ 0 (igual a F)
massa. Vê-se, superpondo os efeitos, que o sistema vai girar (aceleradamente)
em torno do centro de massa sob a ação do conjugado, e o centro de massa vai
~
acelerar-se com uma aceleração ~acm = mFcm . Donde:
Uma força externa F~ aplicada fora do centro de massa equivale a um
binário e a uma força F~ aplicada no seu centro de massa.
Corpo rígido é um sistema de partículas em que as forças internas de ligação garantem sempre que não ocorram deformações, as partículas que constituem o corpo permanecem a distâncias invariáveis, seja qual for o sistema
de forças externas aplicadas ao corpo que se move como um todo sob a ação
da resultante das forças externas e do binário resultante das forças externas.
Um corpo sólido pode ser considerado um corpo rígido se as forças externas
aplicadas não alteram de modo apreciável a distância entre as suas partículas.
Vejamos alguns problemas sobre corpo rígido.
Problemas
Problema 10.1. Suponha uma placa retangular de 20×15 cm2 , de massa igual
a 200 g, colocada sobre uma mesa horizontal sem atrito. Um observador munido de um taco aplica-lhe uma força instantânea durante um intervalo de
tempo muito pequeno, ao longo de uma aresta menor e no vértice, veja Fig. 10.4. Que acontece?
~
Figura 10.4: Placa retangular ao sofrer a ação instantânea da força F.
Sob a ação da força aplicada F~ o centro de massa se desloca na direção
~ ao mesmo tempo a placa gira
paralela a F~ com aceleração ~aCM = (1/m)F,
“ADT-MF” — 2005/11/7 — 8:51 — page 411 — #411
10.1. Distribuição contínua de massa
em torno do centro de massa com movimento de rotação acelerado durante
~ Resultado: a placa se desloca
o intervalo de tempo de aplicação da força F.
com o centro de massa descrevendo um movimento retilíneo e uniforme com
velocidade paralela a F~ e, ao mesmo tempo, ela gira em torno do centro de
massa com movimento de rotação uniforme após cessar a força.
Problema 10.2. Uma haste homogênea de 30 cm de comprimento está em
equilíbrio horizontal sobre outra vertical, sem atrito. Aplica-se-lhe uma força
Figura 10.5: Haste em equilíbrio horizontal sofrendo a aplicação da força do taco.
instantânea horizontal, ortogonal ao seu eixo: (Fig. 10.5)
a) sobre o centro de massa;
b) sobre o ponto P a 10 cm do centro de massa.
Que acontece?
a) A haste se desloca paralelamente a si mesma, com o seu centro de massa
descrevendo uma parábola.
b) A haste se desloca girando em torno do centro de massa, o qual descreve
uma parábola, no plano vertical ortogonal à posição inicial da haste e
que contém uma haste na vertical do suporte. Explique porque.
Problema 10.3. Faça experiência análoga ao Probl. 10.1, colocando em equilíbrio uma placa retangular de papelão (muito leve) sobre haste vertical e, em
seguida, dando-lhe um piparote na linha horizontal ortogonal aos lados da
placa e que passa: a) pelo centro de massa; b) fora do centro de massa. Que
acontece?
Problema 10.4. Pendure uma haste na horizontal, o fio de suspensão passando pela seu centro de massa, veja 3 Fig. 10.6. Dê-lhe uma pancada na horizontal, na direção ortogonal à haste:
3
Note-se que o centro de massa para essas dimensões coincide com o centro de gravidade.
411
“ADT-MF” — 2005/11/7 — 8:51 — page 412 — #412
412
Capítulo 10. Centro de massa
Figura 10.6: Haste suspensa na horizontal por fio vertical passando pelo centro de
massa.
a) sobre o centro de massa;
b) no ponto P, metade da semi-haste da direita.
Explique o resultado. Analise as forças que atuam sobre a haste, antes e depois
da pancada em a) e b). Explique.
Problema 10.5. Um corpo rígido constituído por uma placa homogênea repouso sobre uma mesa horizontal sem atrito. Num dos cantos da placa há uma
ranhura. Nos bordos da ranhura aplicam-se duas forças de mesma intensidade
e direção mas de sentidos contrários – será um binário. O binário pe aplicado
num intervalo de tempo muito curto, de modo que o movimento provocado
por ele não o modifique. Pergunta-se: qual o movimento da placa? Como você
pode realizar na prática tal experiência?
Problema 10.6. Suponha o mesmo problema anterior, tendo-se feito a seguinte
modificação na haste: colocou-se um ressalto nela, no meio da distância entre o centro de massa e uma das extremidades, de tal modo que agora pode
aplicar-se uma força F~ inclinada em relação à direção da haste. Que acontece? Veja Fig. 10.7.
Figura 10.7: Taco atingindo o ressalto na haste – Probl. 10.6.
“ADT-MF” — 2005/11/7 — 8:51 — page 413 — #413
10.1. Distribuição contínua de massa
Õ̧ (Probl. 10.6) – Se não houver o ressalto, a direção da força F~ vai
depender da força de atrito entre a haste e o taco. Se não houver força de atrito,
F~ será ortogonal ao eixo da haste, e nesse caso que acontece?
Problema 10.7. Um corpo rígido constituído por uma placa homogênea repousa sobre uma mesa horizontal sem atrito. Num dos cantos da placa há
uma ranhura de 1 cm de comprimento. Nos bordos da ranhura aplicam-se
Figura 10.8: Ilustrações aos Probl. 10.7 e Probl. 10.8.
duas forças de mesma intensidade e direção mas de sentidos contrários – será
um binário. O binário é aplicado num intervalo de tempo muito curto de modo
que o movimento produzido não o perturbe. Pergunta-se: qual o movimento
da placa? Porque? Como você pode realizar tal experiência? O movimento
depende da posição da ranhura?
Problema 10.8. Suponha que na placa do problema anterior haja um eixo de
rotação ortogonal à placa e passando pelo ponto P. O que acontece quando
se aplica o binário?
Problema 10.9. Demonstre que a localização do centro de massa de um sistema de partículas não depende do particular sistema de referência usado
para localizar as partículas.
Prova. De fato, suponhamos n partículas que num sistema ortogonal cartesiano S (xy) tem coordenadas (xi , yi ), suas massas sendo mi , i ∈ {1, 2, . . . n}. O
centro de massa é dado por:
Pn
Pn
mi yi
i=1 mi xi
x = Pn
y = Pi=1
e
.
n
i=1 mi
i=1 mi
Se efetuarmos um deslocamento paralelo dos eixos, colocando a nova origem
do novo sistema S 0 (x0 y0 ) no ponto (xo , yo ) [em relação a S (xy)], a transformação de coordenadas do sistema S para o novo sistema S 0 será dada por
x0 = x − xo
(10.8)
y0 = y − yo .
413
“ADT-MF” — 2005/11/7 — 8:51 — page 414 — #414
414
Capítulo 10. Centro de massa
As coordenadas do centro de massa no sistema S 0 devem ser então:
(x0 , y0 ) = (x − xo , y − yo ) .
De fato, temos:
Pn
mi xi0
x = Pi=1
n
i=1 mi
0
e
e levando em conta (10.8), vem:
Pn
mi (xi − xo )
0
x = i=1Pn
mi
Pn i=1
mi xi
− xo
e assim
x0 = Pi=1
n
i=1 mi
portanto
x0 = x − xo
Pn
mi y0i
y = Pi=1
,
n
i=1 mi
0
0
Pn
i=1 mi (yi − yo )
Pn
mi
Pn i=1
mi yi
Pi=1
− yo .
n
i=1 mi
e
y =
e
y0 =
e
y0 = y − yo .
.
Problema 10.10. Demonstre para o caso genérico (no plano) de um deslocamento da origem seguido de uma rotação dos eixos.
Problema 10.11. Demonstre o mesmo teorema para o caso espacial (três dimensões).
Problema 10.12. Três partículas de mesma massa m = 5 g estão nos vértices
de um triângulo equilátero de lado igual a L = 15 cm. Determine o seu centro
de massa; como a localização (espacial) do centro de massa de um sistema não
depende do sistema de referência, escolha um sistema que facilite o cálculo,
por exemplo, um sistema cartesiano ortogonal, uma das partículas na origem
e a outra sobre o eixo dos x. Pede-se:
a) determine as coordenadas das partículas no sistema mencionado;
b) determine o centro de massa;
c) faça um diagrama.
Respostas:
√
a) (0, 0) , (0, L) , ((1/2)L, ( 3/2)L);
√
b) (1/2)L, (1/3)( 3/2)L ;
c) Veja Fig. 10.9.
“ADT-MF” — 2005/11/7 — 8:51 — page 415 — #415
10.1. Distribuição contínua de massa
Figura 10.9: Diagrama solução do Probl. 10.12.
Problema 10.13. No problema anterior suponha que uma das partículas, a
que tem coordenada (L, 0) tenha massa de 15 g. Determine o centro de massa
do conjunto.
Problema 10.14. Um fio homogêneo tem o formato de um L, com as duas
pernas de comprimentos iguais a L. Veja Fig. 10.10. Despreze o diâmetro do
fio e determine o seu centro de massa.
Figura 10.10: Ilustração para o Probl. 10.14.
Resposta: (x, y) = ( L4 , L4 )
Problema 10.15. Um fio homogêneo forma um círculo de raio R = 10 cm, e
fixado a ele, em ângulo reto na direção radial há dois segmentos S do mesmo
fio com 10 cm de comprimento cada um. Ver Fig. 10.11. Determine o centro de
massa do conjunto.
Figura 10.11: Ilustração para o Probl. 10.15.
415
“ADT-MF” — 2005/11/7 — 8:51 — page 416 — #416
416
Capítulo 10. Centro de massa
3R
3R
Resposta: (x, y) = ( 4(2π+1)
, 4(2π+1)
)
Problema 10.16. Um T é formado por duas faixas justapostas e de mesma
largura a, a menor com a metade do comprimento L da maior. Veja Fig. 10.12.
As faixas são homogêneas. Determine o centro de massa.
Figura 10.12: Diagrama para o Probl. 10.16; x1 = (L+a)/2, x2 = 0, m1 = κL e m2 = κL/2.
Resposta: x = (L+a)/3 e y = 0.
Problema 10.17. Uma placa quadrada de madeira de comprimento L = 0,5 m
e espessura de 0,5 cm é homogênea. Cortam-se dois cantos do mesmo lado,
os cortes são paralelos aos lados e têm de comprimento L/4, veja Fig. 10.13.
Determine o centro de massa da placa cortada.
Figura 10.13: Diagrama para o Probl. 10.17; as regiões sombreadas são retiradas.
Apresentaremos duas soluções para esse problema, levando em conta que
a massa total da placa com os cantos é mc = κL2 , sendo (0, 0) as coordenadas
do seu centro de massa.
1a solução Considerando as regiões S 1 , S 2 e S 3 indicadas no diagrama.
“ADT-MF” — 2005/11/7 — 8:51 — page 417 — #417
10.1. Distribuição contínua de massa
Massa da parte S 3 : m3 = κL2 /2
Massa da parte S 2 : m2 = κL2 /4
Massa da parte S 1 : m1 = κL2 /8
Coordenadas do CM da parte S 1 : x1 = 0 , y1 = 3L/8
Coordenadas do CM da parte S 2 : x2 = 0 , y2 = L/8
Coordenadas do CM da parte S 3 : x3 = 0 , y3 = −L/4
Com esses dados se calcula o centro de massa da chapa (sem as bordas).
Resposta: x = 0 e y = −3L/56.
2a solução Considerando a área total da chapa com os cantos, da qual se
subtraem as áreas dos cantos R1 e R2
Massa placa sem corte S : mS = κL2
Massa do corte R1 : mR1 = κL2 /16
Massa do corte R2 : mR2 = κL2 /16
Coordenadas do CM da placa sem corte R1 : xS = 0 , yS = 0
Coordenadas do CM do corte R1 : x1 = −3L/8 , y1 = 3L/8
Coordenadas do CM do corte R2 : x2 = 3L/8 , y2 = 3L/8
Massa da placa sem os cantos:
m = m S − m R1 − m R2
= κL2 − κL2 /16 − κL2 /16
= 7κL2 /8
Coordenadas do CM da placa sem os cantos:
(κL2 )(0) − (κL2 /16)(−3L/8) − (κL2 /16)(3L/8)
7κL2 /8
=0
xc =
(κL2 )(0) − (κL2 /16)(3L/8) − (κL2 /16)(3L/8)
7κL2 /8
= −3L/56 .
yc =
417
“ADT-MF” — 2005/11/7 — 8:51 — page 418 — #418
418
Capítulo 10. Centro de massa
Resposta: (xc , yc ) = (0, −3L/56), obtendo-se o mesmo resultado.
Problema 10.18. Uma placa de ferro, homogênea de forma quadrada, de
comprimento L = 0,5 m e espessura 2 mm, tem o formato indicado na Fig. 10.14. A parte circular foi retirada e tem raio de 10 cm. Determine o centro de
massa da chapa.
Figura 10.14: Diagrama para o Probl. 10.18.
Faça o cálculo utilizando o método desenvolvido na 2a solução (pág. 417) do
Probl. 10.17, isto é, considera-se a chapa total de área S = L2 , massa m = κL2 ,
da qual se retira o círculo de raio R.
Resposta:
. Massa da chapa completa S : mS = κL2
. Massa do disco retirado D: mD = κπR
. Massa da chapa sem o disco: mc = κL2 − κπR
. Coordenadas do CM da placa sem corte S : xS = 0 , yS = 0
. Coordenadas do CM do disco D: xD = 0 , yD = R
. Coordenadas do CM da chapa sem o disco:
xc = 0
(κL2 )(0) − (κπR2 )(R)
κL2 − κπR2
R
=− 2
, se L = 50 cm e R = 10 cm,
L
−
1
2
πR
yc =
yc = −1,440 cm.
“ADT-MF” — 2005/11/7 — 8:51 — page 419 — #419
10.1. Distribuição contínua de massa
Problema 10.19. Suponha chapa de ferro semelhante a do problema anterior,
na qual são feitos dois cortes circulares conforme indica a Fig. 10.15, em que
no sistema de referência indicado ter-se-ão as coordenadas dos centros de
massa das secções S 1 e S 2 :
(x1 , y1 ) = (−12,5 cm,+10,0 cm)
(x2 , y2 ) = (+12,5 cm,+10,0 cm),
sendo m1 = κπR2 e m2 = κπR2 . As massa serão subtraídas, logo levam o
sinal negativo, uma das abscissas x1 é negativa, de modo que o momento de 1a
ordem é positivo, o outro, da secção S 2 , é negativo, relativamente a x; como
têm o mesmo valor absoluto, a soma é nula, logo xc = 0. Resta yc , calcule-o.
Figura 10.15: Chapa de ferro do Probl. 10.19.
Resposta: yc = −
L2 − 2πR2
= −3,35 cm.
2πR
Problema 10.20. Demonstre a 2a solução (pág. 417) do Probl. 10.17, supondo
que a massa específica varie de ponto a ponto. Use cálculo integral. Veja que
nos cortes, isto é, nas secções retiradas a massa específica pode ser considerada constante, o que facilita a determinação dos seus centros de massa.
419
“ADT-MF” — 2005/11/7 — 8:51 — page 420 — #420
420
“ADT-MF” — 2005/11/7 — 8:51 — page 421 — #421
Capítulo 11
Princípio da conservação da
energia mecânica
[Infelizmente não dispomos de material original do Prof. Armando referente
a essa matéria, apenas uma folha avulsa tratando de experimento envolvendo
mesa giratória.]
11.1
Aplicações
11.2
Determinação do momento de inércia de um
corpo com a mesa giratória
Equações: 12 mv2 + 12 Iω2 + 12 I1 ω2 , onde (veja Fig. 11.1)
I momento de inércia da mesa giratória e do corpo sobre ela;
I1 momento de inércia da roldana de raio R;
v velocidade da massa m e também do fio que desce, logo v = rω = Rω1 , em
que
ω velocidade angular da mesa giratória
ω1 velocidade angular da roldana.
Determine a velocidade v no final da trajetória (solo), e portanto ω e ω1 finais,
que correspondem assim ao percurso h: determine o intervalo de tempo T 1 , do
repouso até o peso (massa m) atingir o solo. Calcule I1 como sendo o momento
421
“ADT-MF” — 2005/11/7 — 8:51 — page 422 — #422
422
Capítulo 11. Princípio da conservação da energia mecânica
de inércia de um disco de raio R e massa m1 , determinados experimentalmente.
Pede-se: (veja Fig. 11.1)
1. determinar o momento de inércia I2 da mesa giratória sem corpo sobre
ela;
2. determinar o momento de inércia de uma haste longa de aço inoxidável
(homogênea), fixando-a sobre a mesa giratória, o seu centro de massa
estando sobre o eixo de rotação da mesa; nesse caso I = I2 + I3 , em que
I3 é o momento de inércia da haste em relação ao eixo que passa pelo
seu centro de massa e é ortogonal ao eixo da haste; calcule o valor desse
momento de inércia e compare com o valor experimental;
3. faça o mesmo para um cilindro homogêneo, seu eixo coincidindo com o
eixo de rotação da mesa giratória, compare o valor experimental com o
teórico;
4. idem par um paralelepípedo homogêneo, o eixo de rotação passando
pelo centróide do paralelepípedo cuja face maior coincide com a da
mesa; compare o valor experimental com o valor teórico;
5. idem para uma esfera em relação a um diâmetro.
“ADT-MF” — 2005/11/7 — 8:51 — page 423 — #423
11.2. Determinação do momento de inércia de um corpo com a mesa giratória
Figura 11.1: Diagramas para montagem da mesa giratória.
423
“ADT-MF” — 2005/11/7 — 8:51 — page 424 — #424
424
“ADT-MF” — 2005/11/7 — 8:51 — page 425 — #425
Capítulo 12
Movimento periódico e
Regressão linear ∗
12.1
Movimento periódico
Se um ponto P descreve uma série de S movimentos sobre uma curva fechada,
de tal modo que, ao fim de um intervalo de tempo T , ele assuma as mesmas
posições sobre a curva, com a mesma velocidade e com a mesma aceleração,
então se diz que o ponto P descreve um movimento periódico de período T , e
a série de movimentos executada no período T se denomina ciclo. O número
de ciclos por unidade de tempo (por segundo, no SI) se denomina freqüência.
Exemplo: Suponhamos que num instante t0 o ponto P passe pela posição P0
com velocidade ~v0 e aceleração ~a0 , e que ele percorra a curva Γ da Fig. 12.1
com módulo da velocidade crescente continuamente até que retorna a P0 no
instante t1 , com velocidade ~v1 = 2~v0 e aceleração ~a1 , tendo descrito de modo
completo a curva Γ uma (1) vez. Em seguida, sua velocidade vai diminuindo,
em módulo, de modo que no instante t2 ele passa novamente por P0 , reassumindo, em P0 , a velocidade ~v0 e a aceleração ~a0 do instante t0 , tendo descrito,
assim, duas vezes a curva Γ. Ora, se após esse intervalo de tempo T = t2 −t0
mínimo, ele volta a repetir o mesmo movimento identicamente, qualquer que
seja o ponto P0 sobre a curva suporte, dir-se-á que o ponto P executou um movimento periódico de período T , tendo executado nesse intervalo de tempo T
um ciclo, constituído do movimento S em que ele descreve duas vezes a curva
∗
u Este Capítulo corresponde às 53 primeiras páginas de uma apostila datilografada sob
o título Acústica, sem data, possivelmente 1980.
425
“ADT-MF” — 2005/11/7 — 8:51 — page 426 — #426
426
Capítulo 12. Movimento periódico e Regressão linear
Figura 12.1: Curva C suporte do movimento e a descrição cinemática no instante t0 .
Γ. Por exemplo, se ele executou 1000 vezes essa série de movimentos S em 1
(um) minuto e vinte segundos, isto é, em t1000 −t0 = 80 s, então o período T é:
T=
80 s
= 0,08 s/ciclos ,
1000 ciclos
e a freqüência será N igual a:
N=
1000 ciclos
= 12,5 ciclos/s = 12,5 Hz .
80 s
Veja que o período é o intervalo de tempo mínimo para o qual o ponto
começa a repetir
imento identicamente. É claro que a freqüência é o inverso do período:
N=
1
.
T
Os movimentos periódicos são de suma importância na Física.
Exercícios e Problemas
Problema 12.1. Defina movimento periódico, e dê exemplos. Explique o que
é período e freqüência do movimento periódico. Dado um movimento de um
ponto sobre uma curva Γ fechada, diga quais são as condições que devem se
satisfeitas para que o movimento seja periódico.
Problema 12.2. Há fenômenos que se repetem identicamente após intervalos
de tempos iguais T , isto é, após um período T eles se repetem identicamente
em todos os aspectos; são fenômenos periódicos.
. Exemplos: as marés, o mês lunar (período) com as quatro fases da lua
(cheia, minguante, nova e crescente), as manchas solares, as estações
do ano, etc.
“ADT-MF” — 2005/11/7 — 8:51 — page 427 — #427
427
12.2. Movimento Harmônico Simples
Problema 12.3. Os seres vivos podem apresentar variações periódicas em
seus ritmos, funções fisiológicas, etc. Dê exemplos biológicos de fenômenos
periódicos.
Problema 12.4. Matematicamente, há funções ou variáveis que após intervalos constantes da variável independente apresentam os mesmos valores, bem
como suas derivadas primeira e segunda. Exemplo importante para nós são
as funções sen(θ) e cos(θ) que têm tais características. O período sendo 2π, os
ditos valores se repetem após múltiplos (inteiros) de 2π para a variável θ:
sen(θ) = sen(θ + k 2 π) ,
j = 1, . . . , n ,
O mesmo acontecendo para o cos(θ).
Problema 12.5. A História da Humanidade ou a Sociologia apresentarão fenômenos periódicos? Dê exemplos.
12.2
Movimento Harmônico Simples – MHS
O movimento periódico mais simples é o movimento harmônico simples, também chamado de movimento oscilatório simples ou movimento periódico simples.
No movimento harmônico simples (MHS) a curva suporte do movimento
do ponto é um segmento de reta que ele percorre num movimento de vai e vem,
obedecidas as condições para que o movimento seja periódico 1 e, ainda mais,
a equação do movimento é bem determinada e característica. Tomando o ponto
médio do segmento para origem de um sistema de coordenadas Oxy e fazendo
o eixo dos y coincidir sobre o segmento, então a equação dá o deslocamento
em função do tempo (t), a partir da origem O, é:
y = A sen(ωt − ϕ) ,
fazendo ωt−ϕ = θ, temos: y = sen(θ).
Alguns termos são definidos a partir dessa equação do deslocamento e que
devem ser dominados pelo estudante (com a devida compreensão) para entender a linguagem usada: (ver Fig. 12.2)
. o ângulo θ se denomina fase ou argumento (principalmente em acústica);
1
Quais?
“ADT-MF” — 2005/11/7 — 8:51 — page 428 — #428
428
Capítulo 12. Movimento periódico e Regressão linear
Figura 12.2: Ilustração para os termos adotados para o movimento harmônico simples.
. o ângulo ϕ é a fase inicial (fase em t = 0);
. ω se denomina pulsação ou freqüência angular;
. A é o deslocamento máximo (em relação ao ponto médio) e se chama
amplitude.
Calculemos a velocidade e a aceleração. Derivando em relação ao tempo t,
temos:
y = A sen(ωt − ϕ)
deslocamento
(12.1)
v = ω A cos(ωt − ϕ)
velocidade
γ = −ω2 A sen(ωt − ϕ) aceleração.
É fácil ver que todas essas funções são periódicas e de mesmo período T = 2π
ω.
A Tab. 12.1 recorda a variação do seno e do cosseno.
As funções sen(θ) e cos(θ) são periódicas, seus valores se repetindo para
ângulos (argumentos) que diferem de 2kπ, k = 1, 2, 3, . . . , isto é, θ1 e θ2 terão
os mesmos valores para os senos e os cossenos se θ2 − θ1 = 2kπ, k ∈ N. Deste
modo, a velocidade e a aceleração do ponto que descreve o MHS vão assumir
os mesmos valores para os mesmos pontos da trajetória após intervalos de
“ADT-MF” — 2005/11/7 — 8:51 — page 429 — #429
429
12.2. Movimento Harmônico Simples
Tabela 12.1: Quadro de sinais do seno e do cosseno em cada um dos quadrantes,
conforme indicado na figura ao lado, θ ∈ [0, 2π).
Quadrante
sen(θ)
cos(θ)
1o ; θ ∈ [0, π2 )
2o ; θ ∈ [ π2 , π)
3o ; θ ∈ [π, 3π
2 )
3π
o
2 ; θ ∈ [ 2 , 2π)
+
+
-
+
+
tempo tais que as fases θ difiram de um número inteiro de 2π rad:
(ωt2 − ϕ) − (ωt1 − ϕ) = 2kπ
ω(t2 − t1 ) = 2kπ
donde
2π
.
t2 − t1 = k
ω
Ora, o menor intervalo de tempo para que o movimento se repita identicamente
será obtido para k = 1, e, neste caso, o período do movimento harmônico sim1
ω
ples será T = 2π
ω , a freqüência do movimento será N = T = 2π , ou ω = 2πN.
Examinando as equações (12.1):
y = A sen(ωt − ϕ)
v = ω A cos(ωt − ϕ)
γ = −ω2 A sen(ωt − ϕ) ,
vê-se que esta última pode ser escrita γ = −ω2 y e, portanto:
d2 y
+ ω2 y = 0 .
(12.2)
dt2
A equação (12.2) é uma equação diferencial, a qual pode ser satisfeita pelas
funções
y = A sen(ωt − ϕ)
(12.3a)
y = C1 sen(ωt) + C2 cos(ωt)
(12.3b)
em que A e ϕ são constantes arbitrárias 2 , do mesmo modo que C1 e C2 , tratam2
Determinadas pelas condições iniciais (para posição e velocidade) do movimento.
“ADT-MF” — 2005/11/7 — 8:51 — page 430 — #430
430
Capítulo 12. Movimento periódico e Regressão linear
se portanto de soluções gerais da equação diferencial (12.2). É fácil mostrar
que a função (12.3a) coincide com a (12.3b), ambas sendo soluções gerais de
(12.2). De fato:
y = C1 sen(ωt) + C2 cos(ωt)
q
C2
C1
2
2
= C1 + C2
sen(ωt)
+
cos(ωt)
.
q
q
C2 + C2
2
2
C1 + C2
1
2
Fazendo
A=
q
C12 + C22 ,
C1
a= q
C12 + C22
C2
e b= q
,
2
2
C1 + C2
vê-se que a2 +b2 = 1 e −1 ≤ a ≤ +1, −1 ≤ b ≤ +1 , logo, pode fazer-se:
a = cos(ϕ) e b = − sen(ϕ) ,
donde:
y = A {cos(ϕ) sen(ωt) − sen(ϕ) cos(ωt)}
= A sen(ωt − ϕ) ,
que é a expressão (12.3a).
Recapitulando:
um ponto descreve um MHS se a equação do seu movimento é
y = A sen(ωt−ϕ) ,
ou se a função do tempo que descreve seu deslocamento satisfaz
à equação diferencial (12.2):
d2 y
+ ω2 y = 0 ,
dt2
então a equação (12.2) se denomina equação diferencial do MHS
(MHS).
Essas definições são puramente cinemáticas, vejamos uma definição dinâmica.
Já vimos que a aceleração no MHS é γ = −ω2 y, isto é, o ponto que descreve o MHS tem aceleração γ, ora se o ponto é uma partícula de massa m,
então a força que imprime à partícula a aceleração γ é, pela 2a lei de Newton,
F = mγ = −mγ2 y, ou F = −κy. Temos então a seguinte definição so MHS por
uma partícula (definição dinâmica):
“ADT-MF” — 2005/11/7 — 8:51 — page 431 — #431
431
12.2. Movimento Harmônico Simples
Uma partícula executa um movimento harmônico simples se ela
está sujeita a uma força F~ proporcional ao seu deslocamento ~y e
de sentido contrário a esse deslocamento:
F~ = −κ~y .
(12.4)
Deste modo, temos três definições (equivalentes) para o MHS, duas cinemáticas e uma dinâmica.
1a Definição (Cinemática): “Um ponto descreve um movimento harmônico
simples quando ela percorre um segmento de reta num movimento de
vai-e-vem, a sua velocidade e a sua aceleração assumindo os mesmos valores nas mesmas posições da trajetória após intervalos de tempo iguais.
A equação do movimento será y = A sen(ωt − ϕ), quando a posição do
ponto é obtida tomando-se para origem do deslocamento y o ponto médio do segmento descrito, de comprimento 2A.”
O menor intervalo de tempo T , para o qual o movimento se repete identicamente, denomina-se período do movimento; o ângulo (ωt−ϕ) se denomina fase ou argumento, sendo ϕ a fase inicial, ω uma constante com
dimensão igual à de uma velocidade angular e t o tempo.
2a Definição (Cinemática): “Um ponto descreve um MHS se a função do
tempo y = f (t) que descreve o movimento satisfaz à equação diferencial
d2 y
+ ω2 y = 0 ,
dt2
sendo ω uma constante.”
A solução geral dessa equação diferencial sendo
y = C1 sen(ωt) + C2 cos(ωt)
ou, equivalentemente,
y = A cos(ωt) .
3a Definição (Dinâmica): “Uma partícula de massa m descreve um MHS se
ela está sujeita a uma força F~ proporcional ao seu deslocamento ~y, mas
de sentido contrário, F~ = −κ~y .”
“ADT-MF” — 2005/11/7 — 8:51 — page 432 — #432
432
Capítulo 12. Movimento periódico e Regressão linear
~
Figura 12.3: Posição de equilíbrio de uma mola M sustentando um peso P.
Dada a equação fundamental da dinâmica (2a lei de Newton) é fácil
mostrar através da equação diferencial do MHS
√ que essa definição é
3
a
a
equivalente à 2 e, portanto, à 1 , sendo ω = κ/m .
12.2.1
12.2.1.1
Exemplos práticos
Corpo suspenso por uma mola
~ = mg (Fig. 12.3).
Seja uma mola M que suporta uma massa m de peso |P|
A curva de calibração da mola é uma reta a partir de uma certa força de intensidade P1 (Fig. 12.4).
A força (vertical) F~2 − F~1 está associada ao alongamento na mola de y =
l2 − l1 e para todos os vetores F~2 − F~1 = ∆F~ vale a relação com o alongamento
associado (ver Fig. 12.4)
~
|∆F|
= κ = cot(α)
|y|
ou
~ = κ |y| ,
|∆F|
isto é, tomando o ponto de equilíbrio para um peso p (partícula de massa m e
peso p), se a afastarmos da posição de equilíbrio aplicando-lhe uma força f~0 =
~ produziremos um deslocamento y a partir do ponto de equilíbrio, valendo
∆F,
a relação f~0 = κ~y. Ficando a partícula em equilíbrio (veja Fig. 12.5), a mola ao
distender-se aplica sobre a partícula uma força igual e de sinal contrário (1a lei
de Newton): f~ = −κ~y.
Se agora retirarmos a força f~0 (i.e., se soltarmos a partícula), haverá então
sobre a partícula uma força (resultante) f~ = −κ~y que atuando sobre ela a vará
executar um movimento harmônico simples (porquê?).
3
O estudante deve entender bem essas definições, bem como porque são equivalentes, ou
seja, são diferentes maneiras de definir a mesma coisa.
“ADT-MF” — 2005/11/7 — 8:51 — page 433 — #433
433
12.2. Movimento Harmônico Simples
Figura 12.4: Curva de calibração da
mola M.
Figura 12.5: Posição de equilíbrio de
~
uma mola M sustentando um peso P.
Experiências
Experiência 12.2.1.
1. Determinação da constante κ de uma mola.
Sob a ação de um peso p1 = 10 gf, uma certa mola linear tem um comprimento l1 = 8 cm, e para um peso p2 = 20 gf ela apresenta um comprimento l2 = 15 cm. Deste modo:
κ=
p2 − p1 20 − 10
10
=
gf/cm =
gf/cm .
l2 − l1
15 − 8
7
2. Suspende-se nessa mola um peso de 20 gf e afasta-se essa partícula da
posição de equilíbrio aplicando-se uma força f 0 para baixo (veja Fig. 12.5). Retira-se f 0 , a massa m = 20 g passa a oscilar. Pede-se a freqüência
do movimento.
3. Fazer experiência semelhante, verificando experimentalmente o calculado.
Solução
2
1. Temos f = −κy, mas f = mγ = m ddt2y , logo
“ADT-MF” — 2005/11/7 — 8:51 — page 434 — #434
434
Capítulo 12. Movimento periódico e Regressão linear
d2 y
d2 y κ =
−κ
y
ou
+
y=0,
m
dt2
dt2
que é a equação diferencial do movimento que a partícula executará, esse
h i
movimento será harmônico simples, tendo em vista que o coeficiente mκ
m
2
d y
2
é constante. Comparando com a equação (12.2): dt
2 + ω y = 0, que é a
equação diferencial do movimento harmônico simples, podemos pôr:
r
r
κ
κ
1
κ
2
ω = , ou ω =
, donde N =
.
m
m
2π m
Neste caso temos: m = 20 g, κ =
10
gf/cm .
7
Obs: veja-se que a equação fundamental da dinâmica usada foi F~ = m~γ , válida
num sistema coerente de unidades, o mais indicado para este caso sendo
o CGS, em que 1 gf = 980 dyn = 980 g cm/s2 , logo
10
× 980 dyn/cm = 1400 dyn/cm .
7
Portanto a freqüência do movimento será: 4
s
s
g cm
1
1400 dyn
1
1 √ 1
2
N=
=
70 s =
70
2π
20 g cm 2π
g cm 2π
s
κ=
=
8,37
osc/s = 1,33 Hz .
6,28
2. Contou-se o número de oscilações em 30 s e se achou 41 oscilações,
logo
no de oscilações 41 osc
N=
=
= 1,36 Hz .
t
30 s
Discrepância: 2,2 %.
Experiência 12.2.2. Mesma mola, mas m = 10 g. Pelo cálculo N = 1,86 osc/s.
O número de oscilações em 30 s é 50 oscilações; logo, experimentalmente temos:
50
osc/s = 1,86 osc/s .
N=
30
Experiência 12.2.3. Mesma mola, ou outras. Ponha a oscilar na mesma mola
massas de (5, 10, 15, 20 e 25) g. Relacione a freqüência relativa à massa de 5 g
com as das outras, verifique experimentalmente.
4
Está-se usando a notação osc para denotar “oscilação”, além disso, um hertz é igual a uma
oscilação (ou ciclo) por segundo, ou seja, 1 Hz = 1 osc/s.
“ADT-MF” — 2005/11/7 — 8:51 — page 435 — #435
12.3. A 2a lei de Newton na rotação de um corpo
Figura 12.6: Massas rigidamente ligadas entre si e ao eixo Oz.
12.2.2
Exame da equação diferencial do MHS
Vamos examinar a equação diferencial do MHS:
d2 y
+ ω2 y = 0 .
dt2
A variável y pode ser uma variável qualquer, por exemplo, um deslocamento
angular θ, isto é:
d2 θ
+ ω2 θ = 0 .
(12.5)
dt2
Deste modo, por exemplo, se o deslocamento angular de um corpo suspenso
em um eixo satisfaz a essa equação diferencial, então o corpo oscilará com
MHS em torno da posição de equilíbrio.
Para aplicarmos a equação diferencial (12.5) recordemos alguns conceitos
básicos de dinâmica da rotação de um corpo rígido em torno de um eixo.
12.3
A 2a lei de Newton na rotação de um corpo
12.3.1
Momento de inércia de um corpo rígido em relação a um
eixo
Suponhamos um eixo Oz, ao qual estão rigidamente ligadas n partículas: de
massas m1 , m2 . . . mn a distâncias r1 , r2 . . . rn do eixo, respectivamente. Vamos
supor também que essa partículas estejam ligadas rigidamente entre si.
Deste modo, ao aplicarmos uma força F~ a esse sistema de partículas, elas
girarão todas com a mesma velocidade angular ω e a mesma aceleração α em
torno do eixo Oz, descrevendo círculos (em plano perpendicular ao eixo) de
435
“ADT-MF” — 2005/11/7 — 8:51 — page 436 — #436
436
Capítulo 12. Movimento periódico e Regressão linear
Figura 12.7: Massas rigidamente ligadas entre si girando em torno de um eixo.
raios r1 , r2 . . . rn respectivamente e com centros sobre o eixo. As partículas terão acelerações ~ai , de componentes tangencial ~ati e componente normal ~ani ,
i = 1, 2 . . . n. As acelerações normais têm direções perpendicular ao eixo e
passando pela respectiva partícula. Lembramos que o movimento de cada partícula se efetua no plano normal ao eixo Oz, não havendo assim aceleração ao
longo desse eixo.
A força tangencial que imprime a cada partícula a aceleração tangencial
será:
f~ti = mi ~ati , i ∈ {1, 2, . . . n} ,
e a que produz a aceleração normal será:
f~ni = mi ~ani ,
i ∈ {1, 2, . . . n}.
A força (resultante) que atua sobre a partícula i será assim:
f~i = f~ti + f~ni .
Importa agora transformar a força numa grandeza de rotação, e, como sabemos, essa grandeza é o momento de força em relação ao eixo:
,→
M = ~ri ∧ f~i .
Portanto, substituindo a força pela correspondente soma das forças e, em seguida, das componentes das acelerações, teremos:
,→
M = ~ri ∧ f~ti + f~ni
n
o
= mi ~ri ∧ ~ati + ~ri ∧ ~ani ,
“ADT-MF” — 2005/11/7 — 8:51 — page 437 — #437
437
12.3. A 2a lei de Newton na rotação de um corpo
sendo nulo o último termo, pois a reta suporte da força f~ni passa pelo eixo Oz.
Como ~ri estão em planos normais ao eixo, do mesmo modo que as f~ti ,
,→
então os Mi jazem ao longo do eixo Oz, os sentidos coincidentes, logo:
,→
Mi = ~ri ∧ f~ti
= ri fti sen(θi ) û
(como θi = π2 rad)
= ri fti û ,
,→
em que û é um versor ao longo do eixo Oz e de mesmo sentido de α, isto é:
û = ± k̂, k̂ sendo o versor adotado para o eixo Oz. É claro que os momentos
das
forças f~i têm todos o mesmo sentido e, portanto, o momento resultante
,→ P ,→
M = i Mi tem módulo
M=
n
X
|Mi | =
i=1
n
X
ri fti ,
i=1
mas f~ti = mi~ati e, sendo ω a velocidade angular,
,→
,→
dω
dω
= ri α , em que α =
,
ati = ri
dt
dt
deste modo
,→
M=
X
,→
mi ri2 α ,
i
feitas as substituições:
X
,→
,→
2
M = mi ri α = I α ,
,→
i
,→
P
em que I = i Ii , sendo Ii = mi ri2 . Como M é um vetor de mesma direção e
,→
,→
,→
sentido que α, então M = Iα. Vejamos alguns nomes:
. Ii = mi ri2 se denomina momento de inércia da partícula i em relação ao
eixo Oz, e
P
. I = i mi ri2 é o momento de inércia das n partículas em relação a Oz.
,→
,→
Para o movimento de rotação, a expressão M = I α equivale à 2a lei de,→New,→
ton para o movimento de translação: F~ = m~a, ou dito de outro modo, M = I α
é equivalente a expressão da 2a lei de Newton para o movimento de rotação
“ADT-MF” — 2005/11/7 — 8:51 — page 438 — #438
438
Capítulo 12. Movimento periódico e Regressão linear
Figura 12.8: Destaque do elemento de massa dm do corpo rígido
girando em torno do eixo Oz.
de um corpo rígido em
torno de um eixo Oz fixo (em relação a um referen,→
cial inercial),
sendo
M
o
momento em relação ao eixo Oz de forças aplicadas
,→
ao corpo e α a aceleração angular que esse momento imprime ao corpo (em
torno desse eixo). Observe-se que nessa expressão o momento de força corresponde (por analogia) à força, a aceleração angular corresponde à aceleração
de translação, e o momento de inércia corresponde à massa. Assim, como a
massa é a medida de inércia do corpo ao movimento de translação, o momento
de inércia é a medida da inércia ao movimento de rotação. Ele diz respeito não
só à massa, mas também ao modo pelo qual a massa se distribui em torno do
eixo de rotação.
Veja-se ainda que o momento de inércia é aditivo, isto é, os momentos de
inércia de duas partículas de massas m1 e m2 distantes r1 e r2 de um eixo de
rotação são: I1 = m1 r12 e I2 = m2 r22 , e o momento de inércia do conjunto das
duas partículas, em relação ao mesmo eixo, será:
I = I1 + I2 = m1 r12 + m2 r22 .
12.3.2
Momento de inércia de uma distribuição contínua de
massa
Se tivermos uma distribuição contínua de massa m ligada rigidamente a um
eixo Oz, e em torno do qual pode girar, o momento de inércia desse corpo em
relação ao eixo é obtido tomando-se um elemento (infinitesimal) de massa dm
do corpo, o momento de inércia desse elemento de massa será: dI = r2 dm ,
em que r é a distância de dm ao eixo (ver Fig. 12.8). Se o corpo está dividido
em elementos de massa, então seu momento de inércia em relação ao eixo é
a soma de todos os momentos de inércia elementares correspondentes: I =
“ADT-MF” — 2005/11/7 — 8:51 — page 439 — #439
439
12.3. A 2a lei de Newton na rotação de um corpo
Figura 12.9: Ilustração para a localização do elemento de massa
dm em relação ao Centro de Massa e do eixo que passa por O1 .
P
P
dI = r2 dm , a soma que não é mais do que a integral estendida à toda
massa m do corpo:
Z
Z
I=
dI =
r2 dm .
m
m
Entretanto, convém não esquecer o significado físico do momento de inércia.
12.3.3
Teorema de Steiner–Huygens
Um teorema muito importante sobre momento de inércia é o teorema Steiner–
Huygens ou dos eixos paralelos:
Teorema 12.3.1 (Steiner–Huygens). O momento de inércia IZ de um corpo
em relação a um eixo Z é igual à soma do momento de inércia do corpo em
relação ao eixo paralelo (à Z) que passa pelo centro de massa do corpo, ICMZ ,
mais o produto ma2 , em que a é a distância entre os dois eixos (paralelos) e m
a massa do corpo:
IZ = ICMZ + ma2 .
A demonstração é fácil. De fato, consideremos um corpo C de centro de
massa CM, veja Fig. 12.9. Seja um sistema de referência triortogonal Oxyz,
com origem coincidente com o centro de massa CM e em que o eixo Oz é
paralelo ao eixo Z em relação ao qual se calcula o momento de inércia do
corpo; o eixo Oz corta o eixo Z no ponto O1 . Na Fig. 12.10 fizemos dos dois
eixos Oz e Z ortogonais ao plano da Fig. 12.9. Seja um elemento de massa dm
do corpo. No caso em que dm esteja sobre o plano Oxy, veja Fig. 12.10, temos:
r2 = R2 + a2 − 2 a R cos(θ) .
“ADT-MF” — 2005/11/7 — 8:51 — page 440 — #440
440
Capítulo 12. Movimento periódico e Regressão linear
Figura 12.10: Ilustração para a localização do elemento de massa dm em relação ao
Centro de Massa e do eixo que passa por O1 .
Mas R cos(θ) = x, e assim:
r2 = R2 + a2 − 2ax .
Se dm não está no plano Oxy, tomamos um outro sistema de referência O0 x0 y0 z0
em que o plano O0 x0 y0 é ortogonal ao eixo Oz e os eixos O0 x0 e O0 y0 coincidentes com Ox e Oy respectivamente, a origem O0 sobre Oz coincidente com a de
O0 z. Neste caso, as abscissa e a ordenada de dm nos dois sistemas coincidem:
x0 = x e y0 = y. Portanto valem as relações: (veja Fig. 12.10)
r0 2 = R0 2 + a2 − 2 a x0
em que
x0 = x ,
e em que r0 e R0 são as distâncias do elemento de massa dm aos eixos Z e Oz,
paralelo a Z que passa pelo centro de massa (CM) do corpo.
Sendo assim, multiplicando r2 por dm e integrando, obtemos:
Z
Z
Z
Z
2
2
2
IZ =
r dm =
R dm + a dm − 2ax dm .
Mas
Z
Z
R2 dm = ICM ,
Z
a2 dm = a m
e
Z
2ax dm = 2a
x dm = 0 ,
R
visto que x dm = m xCM , em que xCM é a abscissa do centro de massa e que,
por construção do sistema de coordenadas, é nula. O mesmo se pode concluir
“ADT-MF” — 2005/11/7 — 8:51 — page 441 — #441
12.3. A 2a lei de Newton na rotação de um corpo
Figura 12.11: Ilustração para uma demonstração algébrica para o teorema de
Steiner–Huygens.
para a coordenada yCM . Segue-se que o teorema fica demonstrado, pois a coordenada z do centro de massa não intervém nas integrais, portanto,
IZ = ICMZ + a2 m .
A demonstração seguindo essa linha de raciocínio se encontra em 5 [24,
pág. 230, Cap. 9].
Vejamos outra demonstração mais algébrica.
Suponhamos que se deseja calcular o momento de inércia de um corpo C
em relação a um eixo Z. Veja a Fig. 12.11.
Tomemos um sistema de eixos O1 x1 y1 z1 , o eixo O1 z1 coincidindo com o
eixo Z. Seja agora um sistema de eixos Oxyz em que o eixo Oz seja paralelo
5
u Este texto era a referência básica para o Prof. Armando para os cursos de primeiro ano
de graduação.
441
“ADT-MF” — 2005/11/7 — 8:51 — page 442 — #442
442
Capítulo 12. Movimento periódico e Regressão linear
ao eixo Z e que passe pelo centro de massa CM do corpo fixado ao eixo Z.
Para facilitar a compreensão fizemos os planos Oxy e O1 x1 y1 coincidentes e
os eixos Ox e Oy paralelos aos eixos O1 x1 e O1 y1 respectivamente. Tomemos
o elemento de massa dm do corpo no ponto P de coordenadas (x,y,z) no sistema Oxyz, sua projeção sobre o plano Oxy sendo P0 ; as coordenadas de P no
sistema O1 x1 y1 z1 sendo (x1 , y1 , z1 ). A distância entre os eixos Oz e O1 z1 ≡ Z
sendo a, cujas projeções sobre os eixos Ox e Oy são a x e ay em valor numérico,
respectivamente, veja Fig. 12.11 se vê que:
x1 = x − a x
e
y1 = y − ay .
(12.6)
Em relação ao eixo Z, o momento de inércia dIZ de dm é: dIZ = r2 dm, mas
r2 = x12 +y21 e substituindo x1 e y1 em função de x e y dados por (12.6) se tem:
r2 = (x − a x )2 + (y − ay )2
= x2 + a2x − 2a x x + y2 + a2y − 2ay y
= x2 + y2 + a2x + a2y − 2a x x − 2ay y
= R2 + a2 − 2a x x − 2ay y ,
pois R2 = x2 +y2 e a2 = a2x +a2y , como é fácil de ver, portanto:
dIZ = r2 dm
= R2 dm + a2 dm − 2a x x dm − 2ay y dm .
Somando os momentos de inércia elementares 6 :
Z
Z
Z
Z
2
2
IZ =
R dm +
a dm −
2a x x dm −
2ay y dm ,
m
m
R
m
R
R
m
R
mas m R2 dm = ICM e m a2 dm = a2 m, e, m a2x x dm = 0 e m a2y x dm = 0. De fato,
as coordenadas do centro de massa são dadas respectivamente por:
R
R
R
x
dm
y
dm
z dm
xCM = Rm
; yCM = Rm
; zCM = Rm
.
dm
dm
dm
m
m
m
Portanto
Z
m xCM =
6
u
Z
x dm ;
m
m yCM =
Z
y dm ;
m
m zCM =
z dm .
m
Para o limite quando o número de elementos de massa tende a infinito.
“ADT-MF” — 2005/11/7 — 8:51 — page 443 — #443
443
12.3. A 2a lei de Newton na rotação de um corpo
Figura 12.12: Haste homogênea de comprimento L do exemplo 12.3.1.
Mas, por construção do sistema de eixos Oxyz, xCM = 0 e yCM = 0. Logo
Z
Z
Z
Z
2a x x dm = 2a x
y dm = 0 e
2ay y dm = 2ay
y dm = 0 ,
m
m
m
m
porque a x e ay são constantes, tendo em vista que a é a distância entre os dois
eixos paralelos, não dependendo de dm. Assim, como queríamos demonstrar:
IZ = ICM +a2 m.
Observa-se que, por construção do sistema Oxyz, a coordenada zCM do centro de massa não é nula, a origem O não coincide com o centro de massa do
corpo. É suficiente que o eixo paralelo a Z passe pelo centro de massa CM do
corpo, vê-se que na expressão das distâncias r e R do elemento de massa dm
não entra em conta z1 ou z respectivamente.
O teorema de Steiner–Huygens é de grande importância no cálculo do momento de inércia. É também conhecido como teorema dos eixos paralelos.
Exemplo 12.3.1. Calcular o momento de inércia de uma haste homogênea
retilínea de comprimento L, em relação a um eixo que passa por uma das suas
extremidades e é ortogonal ao eixo da haste. (ver Fig. 12.12)
Tomemos um sistema de eixos Oxy, em que Ox coincide com o eixo da
haste homogênea de comprimento L, a origem sendo uma de suas extremidades.
Seja x a abscissa de um elemento de massa dm da haste, considerando
a área da seção reta desprezível. O momento de inércia da haste em relação
ao
R eixo Oy, ortogonal à haste e passando por uma das extremidades é Iy =
x2 dm. O elemento de massa dm = λ dx, em que λ é a massa específica linear
m
RL
da haste, calculada em x, logo Iy = 0 x2 λ dx. Sendo a haste homogênea, λ é
“ADT-MF” — 2005/11/7 — 8:51 — page 444 — #444
444
Capítulo 12. Movimento periódico e Regressão linear
constante e
RL
0
x2 dx = 13 L3 , então
λ 3 1
L = (λL)L2
3
3
Iy =
∴
Iy =
1
mL2 ,
3
pois λL = m, a massa total da haste.
Exemplo 12.3.2. Calcule o momento de inércia da mesma haste em relação a
um eixo que passa pelo centro de massa da haste (abscissa xCM = L/2; L é o
comprimento da haste).
Coloquemos a origem do sistema de coordenadas Oxy no centro de massa
CM da haste, Oy ortogonal à haste. Neste caso teremos:
Z
Iy ≡ IC =
"
+ L2
− L2
λ x2 dx
#+ L
1 3 2
=
λx
3
−L
" 3 2 3#
1 L
L
= λ
+
3
8
8
" 3#
1 L
1
(λL) L2
= λ
=
3
4
12
∴
IC =
1
m L2 .
12
Vamos aplicar o teorema de Stainer–Huygens para uma solução alternativa
deste problema. Temos:
Iy = ICM + ma2 ,
suponhamos que y passe pela extremidade da haste, neste caso Iy = 31 mL2 ,
como neste caso a = 12 L, teremos:
L 2
1
1
mL2 = ICM + m
= ICM + mL2 .
3
2
4
Donde
ICM =
1
1
1
mL2 − mL2 =
mL2 ,
3
4
12
como calculamos diretamente.
“ADT-MF” — 2005/11/7 — 8:51 — page 445 — #445
445
12.4. Pêndulo físico
Figura 12.13: Corpo rígido suspenso do eixo Z que passa pelo ponto P.
12.4
Pêndulo físico
Voltemos ao movimento harmônico.
Seja um corpo C suspenso de um eixo Z que passa pelo ponto O, ver Fig. 12.13.
Seu centro de gravidade CG dista ` de O. Suponhamos que se afaste o
corpo da posição de equilíbrio vertical. O corpo sofre um deslocamento an~ e fica em equilíbrio na nova posição. O mogular θ, sob a ação da força F,
mento de F~ em relação ao ponto O é de igual módulo e de sinal contrário
ao do momento do peso do corpo em relação a O. O momento do peso é
Mmg = −mg` sen(θ), o sinal negativo significando que Mmg atua em sentido
~ o momento de mg passará a
contrário ao de θ. Ora, se retirarmos a força F,
atuar, acelerando o corpo num movimento de rotação em torno do eixo que
passa por O, e vale a segunda lei de Newton para o movimento de rotação
2
em torno de um eixo para os corpos rígidos: M = Iα, em que α = ddt2θ , i.e., a
2
aceleração angular, segue-se que Mmg = Iα = I ddt2θ , mas Mmg = −mg` sen(θ),
portanto:
d2 θ
I 2 + m g ` sen(θ) = 0 ,
dt
ou
!
d2 θ
mg`
sen(θ) = 0 .
+
I
dt2
Essa equação diferencial é de integração difícil (uma vez que não é uma equação diferencial linear).
Ora, se o ângulo θ é muito pequeno, então sen(θ) θ, sendo θ expresso em
“ADT-MF” — 2005/11/7 — 8:51 — page 446 — #446
446
Capítulo 12. Movimento periódico e Regressão linear
Figura 12.14: Haste rígida que oscila em torno do eixo horizontal que passa pelo ponto O.
radiano, e assim:
!
mg`
d2 θ
+
θ = 0,
I
dt2
que é a equação diferencial do movimento harmônico simples [ver (12.2)]
d2 θ
+ ω2 θ = 0 ,
2
dt
tendo em vista que (mg`/I) é constante para este pêndulo físico, portanto:
mg`
ω =
,
I
2
r
ω=
s
mg`
I
ou
T = 2π
I
.
mg`
(12.7)
Isto é, para pequenos ângulos θ o corpo vai oscilar em torno da posição de
equilíbrio com MHS (pequenas oscilações). A freqüência e o período sendo
dadas pelas expressões em (12.7). Vejamos alguns problemas práticos.
Problemas práticos
Problema 12.6. Uma haste retilínea de comprimento igual a 31,0 cm e massa
igual a 19,5 g, oscila em torno de um eixo horizontal que passa pela sua extremidade A e lhe é ortogonal. As oscilações são muito pequenas. (ver Fig. 12.14)
“ADT-MF” — 2005/11/7 — 8:51 — page 447 — #447
447
12.4. Pêndulo físico
r
mg`
, I = 13 mL2 (ver Exemplo 12.3.1) e ` = L/2,
I
s
r
1
mg(L/2)
1
(3/2)g
.
N=
=
1
2
2π
2π
L
mL
3
1
1
Temos N =
=
2πω 2π
logo:
,→
,→
As fórmulas da 2a lei de Newton: F~ = m~a e M = I α são válidas para sistemas coerentes de unidades, como, por exemplo, os sistemas CGS, MKS (i.e.,
o SI), Métrico Técnico, etc. Neste caso o sistema mais próximo dos dados do
problema é o CGS, em que g = 980 cm s−2 , logo:
r
r
1
3 980 cm/s2
1
980 −1
N=
×
s ,
2π 2
32 cm
6,28
21,3
daí,
N = (6,78 Hz)/6,28 = 1,08 Hz
e
T = 0,9 s .
Problema 12.6.1 (Parte prática). Uma haste igual à do Probl. 12.6, oscilando
pelo modo indicado no problema, fez 100 oscilações numa média de 89 s; logo
Nexp = 100
89 Hz = 1,12 Hz e T = 0,89 s.
Problema 12.7. Faz-se uma haste idêntica à anterior oscilar em torno de um
eixo que passa a 10,5 cm de distância de uma extremidade. Pede-se calcular o
período de oscilação e verificar experimentalmente.
q
1
A expressão a usar é a mesma: N = 2π mg`
I , mas agora o momento de
inércia I e a distância ao centro de gravidade (CG) ao eixo são diferentes.
A haste homogênea de comprimento 31 cm, seu centro de massa está no
centro geométrico L2 = 15,5 cm da extremidade, o que significa que o centro de
massa está a 15,5−10,5 = 5,0 cm do eixo. Apliquemos o teorema de Steiner–
Huygens para achar o momento de inércia em relação ao eixo: 7
Iy = ICM + ma2 , neste caso, a = 5,0 cm , logo :
1
Iy =
(31)2 m + m 52 = [80,08 + 25] m = [105,1 m] cm2 .
12
O CG está a uma distância
de ` = 5 cm (coincide com o centro de
q ao eixo q
mg`
mg`
1
1
massa), portanto N = 2π
I = 2π
105,1 m , assim,
r
√
1
g`
46,62 6,83
Ncalc =
=
=
= 1,087 Hz
2π 105,1
6,28
6,28
7
Ver Exemplo 12.3.2.
∴
T calc = 0,92 s .
“ADT-MF” — 2005/11/7 — 8:51 — page 448 — #448
448
Capítulo 12. Movimento periódico e Regressão linear
Determinação experimental – 100 oscilações (i.e., períodos) se efetuaram em
91 s, donde:
Nexp =
100
= 1,089 Hz
91
∴
T exp = 0,91 s .
Problema 12.8. Faça o mesmo Probl. 12.7 colocando o eixo de oscilação a
` = 3,00 cm do CM.
"
#
1
2
2
Iy =
(31) + 3 m = [80,08 + 9] m = 89 m cm2 .
12
r
1
980 × 3
Ncal =
= 0,92 Hz ∴ T cal = 1,087 s .
2π
89
A determinação experimental forneceu: 100 oscilações em 108 s, logo:
Nexp = 0,93 Hz
e
T exp = 1,08 s .
Problema 12.9. Na montagem do Problema 12.8, prende-se na extremidade
inferior da haste uma esfera de massa igual a 7,5 g de modo a que seu centro
de massa (CM) fica a 19,5 cm de distância ao eixo de oscilação. Em primeira
aproximação considere que a massa da esfera está concentrada no seu centro
de massa para o movimento de rotação. Determine a freqüência de oscilação
do conjunto.
Neste problema aplicamos a propriedade aditiva do momento de inércia,
isto é, dados dois corpos C1 e C2 de momentos de inércia I1 e I2 em relação
a um mesmo eixo, o momento de inércia da conjunto, em relação ao mesmo
eixo, é a soma de I1 e I2 : I1 +I2 . Sendo assim, o momento de inércia da haste
e da esfera, em conjunto, é a soma de cada momento de inércia calculados
isoladamente em relação ao mesmo eixo.
Temos, veja Fig. 12.15:
abscissas dos centros de massa: x1 e x2 , donde, para o conjunto:
`CM = xCM =
x1 m1 + x2 m2
,
m1 + m2
onde:
x1 = `H = 3 cm
x2 = `esf = 19,5 cm
“ADT-MF” — 2005/11/7 — 8:51 — page 449 — #449
449
12.4. Pêndulo físico
Figura 12.15: Haste rígida e a esfera presa à extremidade mais distante do eixo y
de rotação.
Figura 12.16: Haste rígida e a esfera presa à extremidade mais distante do eixo y
de rotação, outra vista.
m1 = mH = 19,5 g
m2 = mesf = 7,5 g .
Logo:
`H =
3 × 19,5 + 19,5 × 7,5
= 7,58 cm 7,6 cm .
19,5 + 7,5
Determinação experimental: `CM = 7,6 cm .
Temos ainda:
#
"
1
2
2
(31) + 3 × 19,5 = 1737,12 g cm2
I1 = IH =
12
I2 = (19,5)2 × 7,5 2707,5 g cm2
I = I1 + I2 = 1737,12 + 2707,5 = 4444,62 g cm2 ,
(m1 + m2 ) × g × `CM = 27 × 980 × 7,6 = 201,1×103 g cm2 /s2 ,
s
1
201,1×103
1 p
N=
=
45,25 = 1,07 Hz ∴ T = 0,93 s.
2π
4444,62
6,28
Observe-se que xCM = `CM =
x1 m1 + x2 m2
, logo
m1 + m2
(m1 + m2 )`CM = (x1 m1 + x2 m2 ) = `H mH + `esf mesf
e
(m1 + m2 ) g `CM = mH g `H + mesf g `esf ,
“ADT-MF” — 2005/11/7 — 8:51 — page 450 — #450
450
Capítulo 12. Movimento periódico e Regressão linear
isto é, podemos calcular a freqüência do oscilador formado com a haste e a
esfera, somando os efeitos (momentos) das forças externas aplicadas em cada
massa (pesos), para obtermos o momento do conjunto, do mesmo modo, somamos os momentos de inércia: I = I1 +I2 :
r
m1 g`1 + m2 g`2
1
N=
.
2π
I1 + I2
Determinação experimental: ∆t de 100 oscilações igual a 95 s, logo:
Nexp = 1,05 Hz
e
T exp = 0,95 s.
Problema 12.10. Colocamos o eixo de oscilação a 0,5 cm do centro de massa
do conjunto haste–esfera do Probl. 12.9, calcular a freqüência e o período e
verificar experimentalmente.
Temos:
(L = 31 cm)
#
"
1 2
2
L + (4,1) 19,5 = 1889,4 g cm s−2
I1 = IH =
12
I1 = Iesf = (12,4)2 × 7,5 = 1153,2 g cm s−2
I = I1 + I2 = 3042,6 g cm s−2
(m1 + m2 ) g LCM = 27 × 980 × 0,5 = 13230,0 g cm−2 s−2
r
r
gmLCM
1
1
13230,0
1 p
N=
=
=
4,348
2π
I
2π
3042,6
2π
N = 0,332 Hz
e
T = 3,01 s .
Experimentalmente – 30 oscilações em 95 s, assim:
30
Nexp = 95
= 0,32 Hz e T exp = 3,17 Hz.
Problema 12.11. O eixo de rotação foi posto exatamente passando pelo centro
de massa da haste, isto é, pelo seu ponto médio. A esfera fica com o seu centro
a 16 cm do eixo. Calcule a freqüência.
1
N=
2π
r
1
mg`
=
I
2π
r
(m1 `1 + m2 `2 )g
,
I1 + I2
mas agora `1 = 0 ,
“ADT-MF” — 2005/11/7 — 8:51 — page 451 — #451
451
12.5. Raio de giração
1
(31)2 × 19,5 = 1562 g cm2
12
= (16)2 × 7,5 = 1920 g cm2 , donde:
I1 = IH =
I2 = Iesf
1
N=
2π
r
r
(0 + 7,5×16)g
117600 5,8
1
=
=
g cm2
1562 + 1920
2π
3482
2π
N = 0,92 Hz e T = 1,87 s
Experimentalmente – 100 oscilações em 109 s, portanto
Nexp = 0,917 0,92 Hz
e
T exp = 1,9 s .
Note-se que: o eixo passando pelo centro de massa da haste, o peso da haste
passa pelo eixo, logo seu momento em relação ao eixo é nulo, deste modo, o
momento das forças externas se reduz ao momento do peso da esfera, apenas.
12.5
Raio de giração
Nos problemas anteriores calculamos o momento de inércia da esfera em relação ao eixo de oscilação, tomando o produto do quadrado da distância do
centro da esfera (CM) ao eixo pela massa da esfera, e dissemos que era em 1a
aproximação. De fato, dado um corpo C de momento de inércia Ic em relação
a um eixo, consideremos agora uma partícula de massa igual à massa do corpo
e uma distância ρ do eixo a que está ligado o corpo C, de modo que o momento
de inércia I p da partícula em relação ao eixo seja igual ao momento de inércia
Ic do corpo:
r
Ic
2
.
I p = m ρ = Ic , isto é, ρ =
m
Essa distância ρ se denomina raio de giração do corpo. Dito de outro modo,
“o raio de giração de um corpo em relação a um eixo (de rotação)
Z é uma distância ao eixo tal que, se toda a massa do corpo se
concentrasse a essa distância do eixo Z, seu momento de inércia
em relação a esse eixo teria o mesmo valor”.
Isto significa que, para os efeitos de rotação, podemos considerar toda a massa
do corpo concentrada num ponto 8 a uma distância ao eixo igual ao raio de
8
u Ou distribuída (uniformemente, ou não) sobre uma superfície cilíndrica de raio igual
ao raio de giração e eixo de simetria sobre o eixo de rotação.
“ADT-MF” — 2005/11/7 — 8:51 — page 452 — #452
452
Capítulo 12. Movimento periódico e Regressão linear
giração. Para aclarar as idéias calculemos o raio de giração da haste homogênea
em relação a um eixo que passa pelo seu
q baricentro (ver Exemplo 12.3.2).
2
1
L
Temos IhCM = 12
× mL2 = mρ2 , donde 12
0,29 L, sendo L = 31 cm, ρ =
8,95 cm. Isto é, no que diz respeito às rotações em torno do eixo que passa
pelo centro da haste (coincide com o seu centro de massa), tudo se passa como
se a massa da haste se concentrasse à distância de 8,95 cm do eixo. Observe-se
que a distância do centro de massa ao eixo é nula.
No caso da esfera homogênea, seu centro de massa está a uma distância de 16 cm do centro de massa da haste quando essa esfera é presa numa
extremidade da haste, e aplicando o teorema de Steiner–Huygens teremos:
Iesf = IesfCM + m`2 , em que IesfCM é o momento de inércia da esfera em relação a um eixo que passa pelo centro de massa da esfera e é paralelo ao eixo de
oscilação. Ora, o IesfCM é igual a (2/5) m R2 , em que R é o raio da esfera igual
a 1,25 cm, logo, m sendo igual a 7,5 g, teremos (ver Fig. 12.17)
Figura 12.17: Haste rígida com uma esfera na extremidade inferior oscilando em
torno do eixo Z horizontal.
IesfCM =
2
×7,5×(1,25)2 = 4,688 g cm2 4,7 g cm2
5
e
m`2 = 7,5×(16)2 = 1920 g cm2 ,
logo
IZesf = IZCM + m `2 = 4,7 + 1920 1925 g cm2 .
O eixo Z é o eixo de oscilação (ver Fig. 12.17).qCalculemos
o raio de giraq
ção da esfera em relação ao eixo Z, teremos: ρ =
I
m
=
1925
7,5
= 16,02 cm.
“ADT-MF” — 2005/11/7 — 8:51 — page 453 — #453
453
12.6. Pêndulo simples
A diferença entre a distância do centro de massa da esfera ao eixo de e
a distância a que toda a massa da esfera deveria concentrar-se para produzir
o mesmo efeito nas oscilações (raio de giração) é portanto muito pequena:
0,02 cm. Justifica-se desse modo termos no problema tomada a massa da esfera
como concentrada no seu centro de massa. É fácil entretanto verificar que se
` é comparável ao raio da esfera, não podemos fazer essa aproximação, pois a
diferença será grande; por exemplo, suponhamos que ` = 2 cm, em tal caso
2
m R2 + m `2 = 4,7 + 7,5×(2)2 = 4,7 + 30 = 34,7 g cm2 .
5
q
O raio de giração sendo ρ = 34,7
7,5 = 2,15 cm, o que dá uma diferença de 7,5 %.
Iesf =
12.6
Pêndulo simples
Uma massa m na extremidade A de um fio flexível e inextensível, de massa
desprezível, de comprimento `, fixado pela outra extremidade B, constitui um
pêndulo simples se ` é muito grande em relação às dimensões do corpo de
massa m (ver Fig. 12.18).
Figura 12.18: Pêndulo simples de comprimento ` e massa m.
Figura 12.19: Haste rígida com uma esfera na extremidade inferior oscilando
em torno do eixo Z horizontal.
A posição de equilíbrio do pêndulo simples é a vertical (i.e., com o fio
na vertical). Afastando-o da posição vertical, ele passa a oscilar em torno da
posição de equilíbrio vertical.
Vejamos a equação do movimento do pêndulo simples. Suponhamos que
o pêndulo esteja afastado da posição de equilíbrio, o fio AP, veja Fig. 12.19,
“ADT-MF” — 2005/11/7 — 8:51 — page 454 — #454
454
Capítulo 12. Movimento periódico e Regressão linear
fazendo um ângulo θ com a vertical. A massa m estando concentrada praticamente no ponto P, isto é, trata-se de uma partícula de massa m presa na
extremidade A do fio. As forças que atuam sobre a partícula na posição afastada da vertical serão: a tensão T~ do fio e o peso ~p da massa m do pêndulo.
Pela 2a lei de Newton teremos:
T = +p cos(θ) = m an (direção do fio)
f = −p sen(θ) = m at (direção perpendicular ao fio),
em que ~an e ~at são as componentes da aceleração da partícula na direção ortogonal e tangente à trajetória respectivamente 9 . A componente que leva a
restaurar a posição de equilíbrio (força restauradora) é componente tangencial
f = −p sen(θ), o sinal negativo se deve ao fato de que a partícula tende a girar
sob a ação de f~ em sento contrário ao de θ. Deste modo, a equação se torna:
−m g sen(θ) = −m at
ou
at = −g sen(θ).
dω
d2 θ
=` 2 ,
dt
dt
em que α é a aceleração angular, ω é a velocidade angular da partícula que gira
sobre a circunferência de raio `, comprimento do pêndulo. Temos portanto:
Mas
at = α ` = `
d2 θ g
+ sen(θ) = 0 ,
`
dt2
(12.8)
que é uma equação diferencial de integração complicada. Ora, se considerarmos deslocamentos menores que 5◦ , isto é, em que sen(θ) θ, com aproximação de uma parte em 10000, a equação (12.8) se torna:
d2 θ g +
θ = 0,
`
dt2
(12.9)
que é a equação do MHS, em que:
g
ω2 = ,
`
1
N=
2π
r
s
g
`
e
T = 2π
`
.
g
(12.10)
Observações:
9
u Note-se que se está considerando o sentido do ponto P ao vértice como positivo na
direção da normal (ver Fig. 12.19), e o sentido da tangente para o ângulo θ crescente como o
positivo.
“ADT-MF” — 2005/11/7 — 8:51 — page 455 — #455
455
12.6. Pêndulo simples
1. E a componente T −mg cos(θ) = an ? Explique.
2. Se o ângulo θ é muito pequeno, então `θ ` sen(θ) = y, coordenada
que submete o arco `θ, e podemos também dizer que a partícula
vai se deslocar sobre o segmento de reta 2ymax = 2A, veja Fig. 12.19; como ` é constante, multiplicando por ` a equação (12.8),
obtemos:
`
ou
d2 θ g
+ `θ = 0
`
dt2
⇒
d2 (` θ) g
+ (` θ) = 0 ,
`
dt2
d2 y g
+ y=0,
`
dt2
visto que ` θ = y.
Podemos ainda tomar o pêndulo simples como um caso particular
do pêndulo físico. De fato, a equação do movimento do pêndulo
físico é
d2 θ g m `
+
θ =0,
(12.11)
I
dt2
em que I é o momento de inércia do pêndulo simples em relação
ao eixo de oscilação, o qual é simplesmente I = m`2 , tendo em
vista que podemos considerar a massa concentrada à distância `
do eixo de oscilação. Se substituirmos esse momento de inércia na
expressão (12.11), termos:
d2 θ g m `
+
θ=0
dt2
m `2
ou
d2 θ g
+ θ =0,
`
dt2
que é a expressão do deslocamento angular para o pêndulo simples.
12.6.1
Determinação experimental da aceleração da gravidade
local por meio de pêndulo simples
A vantagem do pêndulo simples é que ele pode fornecer determinações da
aceleração (local) da gravidade com muita facilidade e com uma precisão razoável, ilustrando métodos da Física Geral e Experimental. Vejamos como é
possível fazer experiências com pêndulo simples atingindo os objetivos acima.
Podemos tomar um objeto de dimensões pequenas, como uma esfera de
chumbo, mas de peso razoavelmente grande e pendurá-la na extremidade livre
de um fio de comprimento p e cuja outra extremidade esteja fixa, teremos assim
um pêndulo simples.
“ADT-MF” — 2005/11/7 — 8:51 — page 456 — #456
456
Capítulo 12. Movimento periódico e Regressão linear
Figura 12.20: Geometria do pêndulo simples da experiência.
Observe-se que o comprimento ` do pêndulo simples se estende do ponto
de suspensão ao centro de gravidade do sistema oscilante, isto é, ao centro de
gravidade do conjunto de pesos: peso do fio, peso da suspensão da esfera e
peso da esfera. Esse comprimento ` é assim difícil de obter com boa precisão.
Contorna-se o problema: determina-se com precisão o comprimento p, isto é,
a distância entre o ponto a que está preso o fio, na suspensão, e o ponto onde
o peso (esfera) se prende, veja Fig. 12.20. Em seguida, determina-se com um
cronômetro o intervalo de tempo ∆t, em segundos, para 100 (ou 50) oscilações
∆t
completas. É óbvio que o período será T = 100
= x Hz.
Observação. No estudo do MHS, pendular, o período T é o intervalo de
tempo de uma oscilação completa, isto é, o período é o menor intervalo
de tempo para que o pêndulo adquira a mesma posição da trajetória, a
mesma velocidade e a mesma aceleração, portanto, tem que passar pela
posição duas (2) vezes. Na Fig. 12.20 estão indicadas as posições 1, 0 e
2; a oscilação completa pode ser aquela em que o movimento se inicia
em 1, vai até a posição 2 e retorna à posição 1; ou ainda, ele passa pela
posição 0 indo para a posição 2, volta para posição 0, vai até a posição 1
e retorna à posição 0, completando então uma oscilação completa, o período sendo o intervalo de tempo para executar essa oscilação completa.
Para aumentar a precisão, conta-se o número de oscilações a partir da posição 0, tendo em vista que a determinação do “instante” em que ele passa por
“ADT-MF” — 2005/11/7 — 8:51 — page 457 — #457
457
12.6. Pêndulo simples
0 é muito mais preciso, pois nesse ponto sua velocidade é máxima, enquanto
que nas posições 1 e 2 a precisão é menor, pois o pêndulo pára nessas duas
posições e assim a “ida” e a “volta” se confundem, o que traz uma imprecisão
na determinação da oscilação completa. Temos:
s
g `
T2 ,
T = 2π
,
ou
`=
g
4π2
mas
` = p + p0 ,
logo:
g T 2 − p0
ou
p = k T 2 − p0 ,
p=
4π2
h
i
sendo k = g/(4π2 ) . Vemos que p é uma função afim de T 2 , podemos portanto:
determinar o período T correspondente a vários valores de p e
levar a um gráfico, com T 2 nas abscissas e p nas ordenadas.
Observe-se que, pela função p = kT 2−p0 , para T = 0 ocorre p = p0 ; segue-se que
é fácil determinar graficamente o valor de p0 . De fato, determinando os valores
de T para diferentes valores de p, como p é função afim de T , os pontos (T 2 , p)
devem pertencer a uma reta, portanto os pontos assim determinados devem
delinear um segmento de reta no gráfico, prolongando-se o segmento de reta
até encontrar o eixo dos p (ordenada) para T 2 = 0, obtemos do gráfico o valor
de p0 .
Vamos ilustrar o que vem explicado acima com uma experiência feita com
o Laboratório Portátil. Veja a Fig. 12.21.
Na Tab. 12.2 relacionamos o intervalo de tempo ∆t para 100 oscilações e correspondentes aos valores de p de (120, 100, 80, 60 e 40) cm.
Observação É óbvio que ao variarmos o comprimento de p, a distância p0
também vai variar, pois o peso do fio diminui, segue-se que a precisão cai, é
pois necessário que o peso do objeto pendurado seja tão grande quanto possível
e o peso do fio desprezível relativamente ao peso do objeto pendurado.
Exemplo 12.6.1. Determine a posição do centro de gravidade do conjunto
formado por uma esfera de 5 cm de diâmetro, presa por um fio fixado na
periferia, tendo um comprimento de 120 cm, sabendo que sua densidade linear
é 0,5 g/m. Compare o resultado quando o comprimento do fio é reduzido para
40 cm, o peso da esfera sendo de 40 g ou 100 g
“ADT-MF” — 2005/11/7 — 8:51 — page 458 — #458
458
Capítulo 12. Movimento periódico e Regressão linear
Figura 12.21: Vista de perfil do pêndulo simples da experiência para determinação
(experimental) de g.
Tabela 12.2: Comprimento p do pêndulo e os períodos correspondentes medidos em
100 períodos (5 amostras para cada comprimento).
p
∆t para 100 oscilaçõesa
cm
min
s min
s min
s min
s min
s min
s
s
120,0 3 42,6 3 42,7 3 42,7 3 42,8 3 42,8 3 42,72 222,72
100,0 3 23,8 3 23,8 3 23,9 3 23,6 3 23,7 3 23,76 203,76
80,0 3 2,9 3 3,0 3 3,0 3 2,8 3 2,8 3 2,90 182,90
60,0 2 39,3 2 39,3 2 39,5 2 39,3 2 39,3 2 39,34 159,34
40,0 2 11,6 2 11,6 2 11,5 2 11,5 2 11,6 2 11,56 131,56
Média
a
T
s
2,2272
2,0376
1,8290
1,5934
1,3156
Os tempos foram anotados de um cronômetro à corda.
“ADT-MF” — 2005/11/7 — 8:51 — page 459 — #459
12.6. Pêndulo simples
Figura 12.22: Gráfico de p (cm) versus T 2 (s2 ) dos valores medidos no pêndulo conforme ilustrado na Fig. 12.21.
459
“ADT-MF” — 2005/11/7 — 8:51 — page 460 — #460
460
Capítulo 12. Movimento periódico e Regressão linear
Tabela 12.3: Comprimentos `, períodos T , seu quadrado T 2 , os valores de g calculados por g = (4π2 `)/(T 2 ), sendo g` o valor de g com 3 algarismos significativos, resíduos
r` = g−g` , sendo g` = 979,8. Na última linha estão os valores médios correspondentes
às colunas.
`
T
T2
g
g`
r`
r`2
cm
s
s2
cm/s2
cm/s2
cm/s2
(cm/s2 )2
123
103
83
63
43
2,2272
2,0376
1,8290
1,5934
1,3156
4,960
4,152
3,345
2,539
1,731
978,9
979,3
979,6
979,6
980,7
979
979
980
980
981
-0,8
-0,8
+0,2
+0,2
+1,2
0,64
0,64
0,04
0,04
1,44
1,8
3,345
979,6
979,8
83
0,0
2,8 ÷ 5
No quadro da Tab. 12.2 encontramos os valores do período do pêndulo já
descrito e ilustrado na Fig. 12.21. Com os valores de p e T 2 construímos o
gráfico da Fig. 12.22. Observe-se que os pontos (p,T 2 ) são determinados mui
dificilmente dentro da precisão de T 2 com quatro (4) algarismos significativos;
traçando a reta que melhor se ajusta aos pontos, sua interseção com o eixo dos
p dá o valor p0 = 3 cm. Segue-se que ` = p+p0 = p+3 cm, em que p são os
p
2
valores 120, 100, 80, 60, e 40. Como T = 2π `/g , temos g = 4πT 2` . Vejamos
os valores de g assim determinados. Veja-se Tab. 12.3.
12.6.2
Análise dos resultados
Façamos uma análise dos resultados.
O estudantes deve antes rever a parte de Teoria dos Erros e Algarismos
Significativos do fascículo I, páginas 8 e 13 respectivamente10 . Observemos
inicialmente o que no gráfico da Fig. 12.22 e no quadro da Tab. 12.3 o comprimento p ou ` tem três (3) algarismos significativos. Observe-se que a determinação experimental nos fornece T com 5 (cinco) algarismos significativos e
a p com 4 (quatro) algarismos significativos: a menor divisão da fita métrica
para medir p é o milímetro, e a rigor poderíamos ter esse comprimento com 5
algarismos significativos se apreciássemos frações de mm, entretanto, levando
10
Esta referência corresponde aos parágrafos 2.4 a 2.6 desta revisão.
“ADT-MF” — 2005/11/7 — 8:51 — page 461 — #461
461
12.6. Pêndulo simples
em conta as dificuldades dessa medição na vertical, tomamos para primeiro
algarismo duvidoso o correspondente ao milímetro, e assim p fica com 4 algarismos significativos; o período T porém foi determinado com precisão muito
maior, pois a determinação do intervalo de tempo t em 100 oscilações foi feito
com cronômetro de 1/10 de segundo e, portanto, t foi determinado com 5 algarismos significativos, ver Tab. 12.2. Esse cuidado na determinação de T se
deve ao fato de que o erro em sua determinação entra dobrado no erro de g,
como foi visto nas aulas de Cálculo Numérico e como recordamos adiante.
Na Tab. 12.3, para T 2 tomamos 4 algarismos significativos, para ` apenas 3, pois a impressão gráfica na determinação da reta p = kT 2 + p0 leva a
essa imprecisão em p0 , qualquer variação na inclinação da reta pode atingir
uma imprecisão de (±)1 mm na interseção p0 no eixo dos p, a qual corresponde a 1 mm, segue-se que no gráfico o primeiro algarismo duvidoso de p ou `
corresponde a 1 cm. Por esse motivo, eliminamos na Tab. 12.3 o quarto (4o )
algarismo dos valores de g, de acordo com as regras sobre algarismos significativos (livro I, pág. 13). Formamos assim a 5a coluna da Tab. 12.3, em que
os g` têm apenas 3 algarismos, a média dos valores de g` é g` = 989,8 , na 6a
coluna da Tab. 12.3 registramos os valores dos resíduos da média r` = g−g` e
na 7a coluna
q os seus quadrados. O desvio-padrão, ou erro médio quadrático é
Pn
r2
i=1 i
assim σ =
n , em que n é igual ao número de medições, neste caso igual
a 5. O erro médio da média é
sP
r
n
2
0,75
σ
2,8
i=1 ri
=
=
=
0,4 .
ε=
n−1
n(n − 1)
5×4
2
Finalmente, o valor de g pode ser escrito 11 :
g = 980,0 ± 0,4 .
Esse valor pode parecer muito preciso, mas lembramos que os dados experimentais têm precisão maior, atingindo 4 algarismos significativos. Ainda mais,
na determinação de p0 graficamente, o erro correspondente se soma com o
mesmo sinal para todos os valores de `; se forem negativos, os valores correspondentes de ` vão ficar minorados de um mesmo valor; se p for positivo
eles ficarão majorados do mesmo valor, isso equivale a um erro sistemático na
determinação de `. Segue-se que o valor de g = 980,0±0,4 não é confiável.
Estamos assim diante de um fato que muitas vezes encontramos na Física
Experimental: temos dados bastante precisos, mas na determinação da grandeza usamos um método que não tem a precisão correspondente.
11
v
Sobreestimando-se o erro.
“ADT-MF” — 2005/11/7 — 8:51 — page 462 — #462
462
Capítulo 12. Movimento periódico e Regressão linear
O que fazer então? Procurar um método mais preciso. Existe? Sim, um
método analítico e que se denomina “método dos mínimos quadrados”.
12.7
Método dos mínimos quadrados
O Princípio dos Mínimos Quadrados foi formulado por Legendre:
O valor mais provável de qualquer grandeza observada é tal que a soma
dos quadrados dos desvios (resíduos) desse valor relativamente às determinações observadas é mínimo.
No fascículo I dissemos que o valor mais provável de uma grandeza era
dado pela média aritmética dos valores observados, afirmativa que tomamos
como um princípio ou postulado àquela época. Vamos agora demonstrar esse
“postulado” a partir do Princípio dos Mínimos Quadrados. De fato, suponhamos que o valor mais provável 12 de um grandeza seja g e os seus valores observados sejam gi , com i = 1, 2, 3 . . . n, neste caso os desvios (resíduos) desse
valor serão ri = gi −g, e o princípio acima estabelece que
s=
n
X
ri2
é mínimo.
i=1
Vamos provar que nesse caso g é a média aritmética dos valores de gi . Com
efeito, seja g o valor que torna mínimo a soma dos quadrados dos resíduos:
n
X
ri2 =
i=1
n
X
(gi − g)2 , seja x um valor qualquer:
i=1
n
X
=
(gi − x) + (x − g) 2
i=1
n
n
X
X
=
(gi − x)2 + (x − g)2 2 + 2
(gi − x) (x − g) =
i=1
=
i=1
n
n
X
X
(gi − x)
(gi − x)2 + n(x − g)2 + 2 (x − g)
i=1
i=1
n
n
X
X
2
2
=
(gi − x) + n(x − g) + 2 (x − g) gi − n x .
i=1
12
v
(12.12)
i=1
Isto é, o valor de referência.
“ADT-MF” — 2005/11/7 — 8:51 — page 463 — #463
463
12.7. Método dos mínimos quadrados
P
Como x é arbitrário, façamos gi −nx = 0, isto é:
Pn
gi
x = i=1 = gm , a média aritmética dos gi ;
n
neste caso, a terceira parcela de (12.12) é nula, tendo em vista que
ngm , portanto a equação (12.12) se reduz à:
n
X
i=1
P
gi = nx =
n
X
r =
(gi − gm )2 + n (gm − g)2 .
2
i=1
Ora, qual o valor de g que torna mínima a função anterior? Considerando g
a variável independente, lembramos que o valor que torna mínima a função é
aquele que anula sua derivada primeira e torna positiva sua derivada segunda,
temos:
d X 2
ri = −2n(gm − g) = 0 , portanto g = gm .
dg
A derivada segunda é sempre positiva:
d2 X 2
ri = 2n > 0 .
dg2
Logo o valor de minimiza a soma dos quadrados dos desvios é igual a média
aritmética desses valores, como queríamos provar.
12.7.1
Aplicação do método dos mínimos quadrados
Para aplicarmos o método dos mínimos quadrados (MMQ) na obtenção da
equação da reta p = kT 2−p0 , vamos, para maior generalidade, representar p por
y, T 2 por x, e escrever a equação da reta como
g
a = k = 4π2
y = ax + b , em que
b = −p0
são coeficientes a determinar, a fim de que a reta seja a mais provável para
representar (a lei de interdependência entre) os pontos (xi ,yi ) = (pi , T i2 ). É claro
que essa reta de um modo geral não passará pelos pontos (xi , yi ), de modo que,
ao substituirmos x e y por esses valores, haverá um desvio:
ri = (axi + b) − yi ,
“ADT-MF” — 2005/11/7 — 8:51 — page 464 — #464
464
Capítulo 12. Movimento periódico e Regressão linear
em geral não-nulo. Aplicando o MMQ, devemos ter:
R=
n
X
ri2
n
X
=
(axi + b − yi )2 = mínimo.
i=1
i=1
Ora, essa função em a e b será mínima para cada uma dessas variáveis se:
∂R
=0
∂a
desse modo,
Donde as equações:
e
∂R
=0,
∂b
∂R X
=
2(axi + b − yi )xi = 0
∂a
i=1
n
∂R X
=
2(axi + b − yi ) = 0 .
∂b
i=1
n
n
n
n
X
X
X
2
a
xi + b
xi −
xi yi = 0
i=1
i=1
i=1
n
n
X
X
a
x
+
nb
−
yi = 0 .
i
i=1
i=1
Dividindo por n, obtemos:
n
n
n
X
X
X
2
xi
xi yi
xi
i=1
i=1
i=1
+b
−
=0
a
n
n
n
n
n
X
X
x
yi
i
i=1
i=1
+b−
=0.
a
n
n
Os somatórios divididos por n representam as médias dos respectivos valores
e que serão representados, como usual, por:
x2
Donde:
n
1 X 2
x ,
=
n i=1 i
2
a x + b x − x y = 0
a x + b − y = 0 .
n
1 X
xi ,
x=
n i=1
Ou ainda:
etc.
2
a x + b x = x y
a x + b = y .
“ADT-MF” — 2005/11/7 — 8:51 — page 465 — #465
465
12.7. Método dos mínimos quadrados
Que é um sistema de equações (lineares) com duas incógnitas a e b, cuja solução é:
2
x
x
y
x y x
x y y 1
a = e
b = x2 x
x2 x
x 1
x 1
x2 x
= x2 − x x2 = x2 − x2 :
ou, como x 1
xy − xy
a=
x2 − x2
x2 y − x y x
.
b =
x 2 − x2
Lembramos que:
(12.13)
xi = T i2
yi = pi
g
a=k= 2
4π
b = p0 .
Podemos agora usar os valores experimentais precisos para achar o valor de g,
evitando o erro sistemático já mencionado.
Na Tab. 12.4 colocamos os valores de yi = pi , xi = T i2 , xi yi = pi T i2 , xi2 = T i4
para obter as respectivas médias, bem como x y, necessárias para o cômputo
de a e b em (12.13).
Temos, x2 = (3,345438)2 = 11,191955, então:
a=
xy − xy
=
x 2 − x2
= 24,776529
x2 y − x x y
299,9236 − 267,6350
32,2886
=
12,495148 − 11,19155 1,303193
12,495148×80,00 − 3,345438×299,9236
12,495148 − 11,19155
−x
999,61184 − 1003,3758
=
= −2,88829 −2,89
1,303193
b=
x2
2
=
“ADT-MF” — 2005/11/7 — 8:51 — page 466 — #466
466
Capítulo 12. Movimento periódico e Regressão linear
Tabela 12.4: Valores de yi , xi , xi yi , xi2 e as respectivas médias.
yi
pi (cm)
T i (s)
120,00
100,00
80,00
60,00
40,00
400,00
2,2272
2,0376
1,8290
1,5934
1,3156
9,0028
xi
T i2 (s2 )
xi2
(T i2 )2
xi yi
pi T i2
4,96042 595,2504
4,151814 415,1814
3,34524 267,6192
2,53892 152,3352
1,73080
69,2320
16,72719 1499,6182
y
T
x
80,00 1,80056 3,345438
24,60577
17,23756
11,19063
6,44611
2,99567
62,47574 Somas
xy
x2
xy
299,9236 12,49515 267,63500
Portanto, a = 24,776529 e b = 2,89. Como vimos, g = 4π2 a, donde, feitos os
cálculos,
g = 978,1420 978,14 cm/s2 .
Por outro lado, como b = p0 = 2,89 2,9 , dentro da precisão estimada, e
considerando que o erro sistemático fique dentro do erro experimental, podemos considerar ` = p + p0 como afetado apenas pelos erro acidentais e assim
construir o quadro da Tab. 12.5.
O desvio-padrão é:
s
r
Pn
2
(∆g
)
1386×10−4
i
i=1
σ=
=
= 0,17 .
n
5
O erro médio da média é:
σ
em = √
= 0,08 .
n−1
Portanto, teríamos:
g = 978,16±0,08 ,
12.8
ou ainda:
g = 978,16±0,1 .
Retas de regressão. Coeficiente de correlação
Para esclarecer melhor o que fizemos na aplicação dos mínimos quadrados na
obtenção da lei de interdependência linear entre dias grandezas físicas, vamos
fazer uma recapitulação.
“ADT-MF” — 2005/11/7 — 8:51 — page 467 — #467
467
12.8. Retas de regressão. Coeficiente de correlação
Tabela 12.5: Valores corrigidos dos pêndulos.
`
T2
4π2 `
g
∆g
(cm)
(s2 )
(cm)
4π2 `/T 2
gm −g
122,89 4,96042 4851,5023 978,04
102,89 4,151814 4061,934 978,35
82,89 3,34524 3272,366 978,22
62,89 2,53892 2482,798 977,90
42,89 1,73080 1693,229 978,29
414,45 16,72719
4890,79
`
T2
82,890 3,345438
gm
978,16
+0,12
-0,19
-0,06
+0,26
-0,13
0,00
(∆g)2
144×10−4
361×10−4
36×10−4
676×10−4
169×10−4
1386×10−4 Somas
(∆g)2
Médias
277,2×10−4
Indiquemos as grandezas por x e y entre as quais se procura uma relação
de interdependência. Na determinação experimental temos sempre um par de
valores (xi , yi ), em que a determinação experimental da grandeza x, xi , correspondente a determinação experimental yi da grandeza y. Levados a um gráfico,
os pares de valores fornecem uma sucessão de pontos de coordenadas (xi , yi ).
Suponhamos que essa sucessão de pontos sugira uma linha reta, cuja equação
poderá ser posta sob a forma y = ax+b. Até onde podemos garantir que existe
realmente uma interdependência linear entre as grandezas x e y? E, se existe,
quais os coeficientes a e b da reta que melhor exprima essa interdependência,
a partir das determinações experimentais (xi , yi )? Haverá alguma maneira de
expressar a justeza da hipótese de que a relação entre as duas grandezas seja a
proposta? São essas perguntas que tentaremos responder no que se segue.
Suponhamos previamente que exista entre essas grandezas uma lei de interdependência linear, expressa pela equação
y = ax + b
em que x é considerada a variável independente, e y a variável dependente;
exatamente como no caso do pêndulo simples em que conhecíamos a lei de
interdependência p = aT 2 +b, entre o quadrado do período e o comprimento p,
aqui xi = T i2 e y = p.
As determinações experimentais de x são indicadas por xi e as de y por
yi , i = 1, 2, 3 . . . n. Isto significa que ao determinamos xi de x resulta para y o
valor yi nos nossos instrumentos. É claro que podemos tomar os valores de xi
muito precisos usando instrumentos refinados e assim supor que os valores de
“ADT-MF” — 2005/11/7 — 8:51 — page 468 — #468
468
Capítulo 12. Movimento periódico e Regressão linear
xi são valores exatos (dentro da precisão da medição) e que os valores y0i que
resultam para y, quando substituímos x pelos valores xi na equação y = ax + b,
sejam valores também precisos (absolutos) da grandeza y, supondo que a e
b exprimam a interdependência entre as duas grandezas. Nesse caso, o valor
y0i = axi + b será diferente da determinação experimental yi correspondente a
xi , havendo assim um desvio di = yi − y0i , ou erro entre o valor experimental
e o valor calculado, suposto correto. A soma dos quadrados dos desvios ou
resíduos
n
n
n
X
X
X
R=
di2 =
(yi − y0i )2 =
yi − (axi +b) 2 ,
i=1
i=1
i=1
pelo princípio dos mínimos quadrados, deve ser um mínimo para os coeficientes a e b, donde:
n
o
∂R X n
=
− xi yi − (axi +b) = 0
∂a
i=1
(12.14)
n
o
∂R X n =
− yi − (axi +b) = 0 ,
∂b
i=1
(12.15)
isto é, a (12.14) será:
“ADT-MF” — 2005/11/7 — 8:51 — page 469 — #469
469
12.8. Retas de regressão. Coeficiente de correlação
n n
X
o
xi yi − (axi +b) = 0
i=1
n
n
n
X
X
X
(xi yi ) −
(axi2 ) −
(xi b) = 0
i=1
i=1
i=1
n xy − a n x2 − b n x = 0
xy − a x2 − b x = 0 ,
(12.16)
tendo em vista que
1X
xi yi = xy ,
n i=1
n
1X 2
x = x2
n i=1 i
n
1X
xi = x .
n i=1
n
e
Analogamente, a equação (12.15) se torna:
n
X
yi −
i=1
n
n
X
X
(axi ) −
b=0
i=1
n
X
i=1
i=1
yi − a
n
X
xi − nb = 0
i=1
ny − an x − nb = 0
y−ax−b=0
portanto
y = ax + b.
(12.17)
O par de valores médios (x, y) vai ser representado por um ponto Pm no gráfico.
Pm será denominado de ponto médio. Vê-se que o ponto médio, pela (12.17),
está sobre a reta que representa a relação de interdependência entre x e y. Esse
resultado é importante, pois, dado o ponto médio Pm , a reta que melhor representa a relação de interdependência entre x e y passa por ele, portanto, além de
Pm , basta determinar o coeficiente angular a da reta para determiná-la.
As equações (12.16) e (12.17) são duas equações lineares nos coeficientes
“ADT-MF” — 2005/11/7 — 8:51 — page 470 — #470
470
Capítulo 12. Movimento periódico e Regressão linear
a e b, que podem ser assim determinados: 13
a x2 + b x = x y
ax +b =y
portanto:
xy
y
a = x2
x
x2
x
b = x2
x
x
1
xy − x y
=
x2 − x 2
x
1
xy
y x2 y − x xy
=
.
x2 − x 2
x
1
Conforme havíamos obtido anteriormente [ver (12.13)], sem entrar em pormenores.
Para penetrar mais na conceituação desenvolvida, vamos explorar o fato de
que o ponto médio Pm (x, y) pertence à reta: y = ax+b , para isso vamos mudar
o sistema de coordenadas por uma composição de deslocamentos paralelos aos
eixos coordenados, colocando a origem do novo sistema de referência no ponto Pm . Indiquemos por X e Y as coordenadas no novo sistema. A equação da
reta y = ax+b passa a ser Y = aX , pois, neste caso, a reta passa pela origem Pm
do novo sistema, e o coeficiente angular da reta a é o mesmo, pois os novos
eixos são paralelos aos anteriores. Veja Fig. 12.23.
As fórmulas de transformação para o novo sistema, como se sabe, são:
X = x − x
(12.18)
Y = y − y .
Como b = 0 , no novo sistema, podemos pôr:
b=
13
u
X 2 Y − X XY
X2 − X
2
,
Uma forma alternativa é o tratamento matricial:
a
x2 x a x y
1
= ⇒ =
2
b
b
y
x 1
x − x2
1
−x
−x x y
.
x2 y
“ADT-MF” — 2005/11/7 — 8:51 — page 471 — #471
471
12.8. Retas de regressão. Coeficiente de correlação
Figura 12.23: Sistema de coordenadas paralelos, x, y e X, Y, tais que X = x − x e
Y = y−y.
o que acarreta X 2 Y = X XY, mas Y = aX, logo X 2 aX = X XY, isto é,
a=
XY
X2
,
como Y = aX, obtemos as expressões:
Y=
XY
X2
X
(12.19)
e, por (12.18),
XY
(x − x) .
(12.20)
X2
Observe que X é o desvio de x em relação ao valor médio de x: X = x− x, e Y
é o desvio de y em relação ao valor médio de y: Y = y−y. Indiquemos, como
usual, a média dos quadrados desses desvios por: (note-se que X = 0 e Y = 0)
y−y=
σ2X =
2
1 X
(Xi − X)2 = X 2
n i−1
2
1 X
(Yi − Y)2 = Y 2 ,
n i−1
e
σ2Y =
e
σ2Y = Y 2 .
respectivamente, e assim:
σ2X = X 2
“ADT-MF” — 2005/11/7 — 8:51 — page 472 — #472
472
Capítulo 12. Movimento periódico e Regressão linear
A equação (12.19) se torna:
Y=
XY
X.
σ2X
Dividindo membro a membro a equação anterior por σY , vem:
Y
XY
XY
X
=
X=
2
σY
σY σX σX
σY σX
ou como σ2Y = Y 2 e σ2X = X 2 , teremos:
X
Y
XY
X
= q
= r
,
×
σY
σX
σX
2
2
Y X
em que
r= q
XY
,
Y 2 X2
coeficiente que se denomina coeficiente de correlação entre as variáveis x e y.
A reta:
XY
(x − x)
y−y =
X2
se denomina reta de regressão de x sobre y, pois obtivemos sua equação supondo que as determinações experimentais xi fossem muito precisas e calculando-se os valores da variável independente y dos xi pela equação de interdependência y = ax + b.
Observe-e que no sistema de coordenadas XY, com origem no ponto médio
Pm , a equação (12.20) se torna (12.19), isto é,
y−y=
XY
X2
(x − x)
se torna Y =
XY
X2
X.
O coeficiente angular da reta de regressão de x sobre y sendo a = XY/X 2 .
Ora, como obtivemos esse resultado? Considerando os valores de x muito
precisos e determinando os correspondentes valores de y pela equação de interdependência y = ay + b; mas o mesmo pode ser feito com os valores de y,
podendo tornar os valores de y tão precisos quando os de x, basta que os instrumentos que medem y tenham a precisão adequada. Deste modo, podemos
desenvolver um raciocínio análogo tomado como variável independente y, x
“ADT-MF” — 2005/11/7 — 8:51 — page 473 — #473
473
12.8. Retas de regressão. Coeficiente de correlação
como variável dependente: x = a0 y+b0 . A relação de interdependência é linear,
os coeficientes a0 e b0 são diferentes. Observamos que no caso do pêndulo
simples tanto x = T 2 como y = p poderiam ter o mesmo número de algarismos
significativos, bastando que a precisão na determinação de p chegasse ao 1/10
de mm, o que seria perfeitamente possível.
Façamos assim dedução análoga, apenas trocando x por y, isto é, as determinações de y, yi , são muito precisas e os valores calculados x: xi = a0 yi + b0
são valores precisos também da grandeza x. Esses valores de x, em geral, não
coincidem com as determinações experimentais de x, xi , o que fornece resíduos
ou desvios:
di = xi − xi0 = xi − (a0 yi +b0 ) .
A soma dos quadrados desses desvios será um mínimo pelo Princípio dos Mínimos Quadrados:
n
X
di2
=
n
X
i=1
logo, fazendo R =
xi − (a0 yi +b0 ) 2 , mínimo em relação a a0 e b0 ,
i=1
Pn
2
i=1 (di ) :
∂R X
=
(−yi ) xi − (a0 yi +b0 ) = 0
0
∂a
i=1
n
=
n
n
X
X
(yi xi ) −
(a0 y2i + b0 yi ) = 0
i=1
i=1
e dividindo por n, obtemos:
x y − a0 y2 − b0 x = 0 .
Analogamente:
∂R X
(−1) xi − (a0 yi +b0 ) = 0 .
=
0
∂b
i=1
n
Donde, como é fácil obter:
x − a0 y − b0 = 0,.
O que mostra que a reta x−a0 y−b0 = 0 passa pelo ponto médio Pm .
(12.21)
“ADT-MF” — 2005/11/7 — 8:51 — page 474 — #474
474
Capítulo 12. Movimento periódico e Regressão linear
As duas equações:
a0 y2 + b0 y = yx
a0 y + b0 = x
permitem obter a0 e b0 :
a0 =
yx − x y
b0 =
e
y2 − y2
y2 x − y yx
y2 − y2
.
Façamos novamente uma mudança de coordenadas deslocando os eixos
paralelamente de modo a colocar a origem do novo sistema sobre o ponto
médio Pm . As novas coordenadas serão Y = y−y e X = x − x. Observe-se que
as variáveis independentes são y e Y, e as dependentes x e X. No novo sistema
a equação de interdependência será X = a0 Y; a inclinação da reta não mudou,
apenas X = 0, donde:
b0 =
Y2 X − Y Y X
= 0 , logo
2
Y2 − Y
Y 2 X − Y Y X = 0 e como X = a0 Y
Y 2 a0 Y = Y Y X , isto é :
a0 =
X=
YX
Y2
YX
Y2
, e assim
Y,
x−x=
YX
Y2
(y − y) .
Observe-se que a0 é a inclinação da reta x = a0 y+b0 sobre o eixo dos y, isto
é, a0 = tan(θ0 ), em que θ0 é o ângulo que a reta faz com o eixo y, portanto seria
a tangente do complemento do ângulo θ da reta y = ax+b, a = tan(θ), se as duas
retas coincidissem.
Retomemos a equação
x−x=
YX
Y2
(y − y) .
Dividamos ambos os membros por σX em que σ2X = X 2 , e como σ2Y = Y 2 ,
“ADT-MF” — 2005/11/7 — 8:51 — page 475 — #475
475
12.8. Retas de regressão. Coeficiente de correlação
Figura 12.24: Retas de regressão: a 1a reta de Regressão é entre as variáveis x e y; a
2a reta de Regressão é entre as variáveis y e x, onde a primeira variável é a considerada
independente.
teremos:
x−x
YX
(y − y)
=
σX
σX σY σY
= r0
(y − y)
σY
em que r0 = q
YX
Y2
,
X2
r0 se denomina coeficiente de correlação entre as variáveis y e x.
As duas retas de regressão coincidem?
Observamos que, veja Fig. 12.24, os coeficientes a e a0 , que dão as inclinações das duas retas de regressão, têm por expressão:
a=
XY
X2
e
a0 =
YX
Y2
.
Observe que XY = Y X, as inclinações das duas retas vão diferir pelo denominador das duas frações, os quais não são iguais. Observe-se que o ângulo θ2 é
o complemento do θ1 quando as retas coincidem e nesse caso aa0 = tan(θ1 )×
“ADT-MF” — 2005/11/7 — 8:51 — page 476 — #476
476
Capítulo 12. Movimento periódico e Regressão linear
tan(θ2 ) = 1 (prove) ou ainda
aa0 =
XY
X2
×
YX
XY
=
Y2
X2
2
Y2
= r2 ,
XY
pois r = q
.
X2 Y 2
Segue-se que, quando as duas retas de regressão coincidem, o coeficiente de
correlação é r = 1, correlação (linear) perfeita. No caso em que as retas de
regressão não coincidem, havendo um ângulo ∆θ entre elas e em que ∆θ é
pequeno, a reta que melhor exprime a relação entre x e y é dada pela bissetriz
do ângulo entre as duas retas de regressão.
Resumindo:
. a primeira reta de regressão tem por equação:
Y=
y−y=
XY
X2
XY
X2
X,
ou ainda,
(x − x) = a(x − x) ;
a=
XY
X2
;
. a segunda reta de regressão tem por equação:
x−x=
XY
Y2
(y − y) = a0 (y − y) ;
a0 =
XY
Y2
,
ou exprimindo y em função de x:
y−y=
Y2
XY
(x − x) = a1 (x − x) ;
a1 =
Y2
XY
.
Observe-se que agora a1 é o coeficiente angular da reta referida ao eixo dos
x, ou melhor, a1 é a tangente do ângulo θ20 entre o eixo dos x e a 2a reta de
regressão, enquanto que a0 é a tangente do complemento de θ20 . Se as duas
retas coincidem:
a1 = a ;
como
a1 =
nesse caso:
XY
X2
=
Y2
XY
ou
Y2
XY
e
a=
XY
X2
,
2
XY
q
= 1 ,
2
2
X Y
e o coeficiente de correlação é, nesse caso, r = 1.
“ADT-MF” — 2005/11/7 — 8:51 — page 477 — #477
477
12.9. Aplicação ao exemplo do pêndulo simples
Tabela 12.6: Valores para o cálculo das retas de regressão e do coeficiente de correlação com base nos dados da Tab. 12.4.
yi
xi
Y
X
p (cm)
T 2 (s)
yi −y
xi − x
120,00
100,00
80,00
60,00
40,00
4,96042 40,0 +1,61449
4,15181 20,0 +0,80638
3,34524
0,0 -0,00020
2,53892 -20,0 -0,80652
1,73080 -40,0 -1,61464
y
x
80,00 3,34544
12.9
X2
XY
64,5799
16,1275
0,0
16,1304
64,5855
Y2
2,608167 1600,0
0,650242 400,0
0,000003
0,0
0,650471 400,0
2,607058 1600,0
XY
32,2847
X2
1,30319
Y2
800,0
Aplicação ao exemplo do pêndulo simples
Vamos agora aplicar esse resultado no exemplo do pêndulo simples (§12.6.1),
calculando as retas de regressão e o coeficiente de correlação de x = T 2 e y = p.
Para tanto, temos de ter os valores de X, Y, XY, etc., os quais se encontram no
quadro da Tab. 12.6. Pelos valores da Tab. 12.6, temos:
y−y=
XY
(x − x) =
32,28466
(x − x)
1,30319
X2
= 24,77356 (x − x)
que é a primeira reta de regressão. Vejamos a segunda:
x−x=
XY
(y − y) =
32,28466
(y − y)
800
y2
= 0,04035582 (y − y)
ou, pondo y em função de x:
Y2
800
(x − x)
32,28466
XY
= 24,77957 (x − x) .
y−y=
(x − x) =
“ADT-MF” — 2005/11/7 — 8:51 — page 478 — #478
478
Capítulo 12. Movimento periódico e Regressão linear
Para o coeficiente de correlação:
r= q
XY
X2
=
Y2
32,28466
32,28857
logo
r = 0,99988 .
Resumindo e aproximando os cálculos, temos:
. 1a reta de regressão:
y − y = 24,774 (x − x) = tan(θ1 ) (x − x)
. 2a reta de regressão:
y − y = 24,780 (x − x) = tan(θ20 ) (x − x)
. Coeficiente de correlação:
r = 0,9999 .
Donde
tan(θ1 ) = 24,774 , isto é, θ1 = 87,6885◦ ,
e
tan(θ20 ) = 24,780 , isto é, θ20 = 87,6890◦ .
Donde, ângulo entre as duas retas de regressão: ∆θ = 0,005◦ , as retas são praticamente coincidentes.
12.9.1
Observação importante
O estudante atento deverá ficar intrigado porque os ângulos θ1 e θ20 calculados pelo método do §12.9 têm valores próximos a 90◦ , enquanto que a reta do
gráfico da Fig. 12.22 (pág. 459) faz com o eixo dos x um ângulo muito menor.
De fato, o ângulo θ, veja o gráfico, tem por cateto oposto um segmento de
5 unidades, e por cateto adjacente tem um segmento de 8 unidades, portanto
tan(θ) = 58 = 0,625 , o que significa que θ = 32◦ . O que causa toda essa diferença? A diferença está na escala usada num caso e no outro. É fácil ver que
as unidades em que são expressas T e p são o segundo e o centímetro respectivamente. Deste modo, se quisermos comparar os dois resultados, temos que
“ADT-MF” — 2005/11/7 — 8:51 — page 479 — #479
479
12.9. Aplicação ao exemplo do pêndulo simples
os exprimir na mesma unidade. Observe o estudante que, no gráfico da Fig. 12.22, o cateto oposto ao ângulo θ, que tem 5 unidades e corresponde a 50 cm,
pois cada unidade corresponde a 10 cm. No cateto adjacente, por sua vez, cada
unidade corresponde a 1/4 s2 , como são 8 unidades, então esse cateto corres◦
ponde a 8× 14 s2 = 2 s2 , logo tan(θ) = 50
2 = 25, o que corresponde a θ = 87,71 ,
comparável com os resultados já obtidos. Para usarmos a escala do gráfico,
basta notar que no eixo dos y, 4 unidades correspondem a 40 cm e no eixo x, 4
unidades correspondem a 1 s2 . Logo, se quisermos passar para as unidades do
gráfico tanto θ1 como θ2 , vasta dividir suas tangentes, isto é, seus coeficientes
angulares, por 40, de fato:
24,77356
= 0,61934
40
24,77957
tan(θ20 ) =
= 0,61949
40
tan(θ1 ) =
⇒
θ1 = 31,771◦
⇒
θ20 = 31,778◦ .
Vemos assim que o problema todo residia nas diferentes unidades usadas.
Problema
O estudante que tem gosto pela precisão e por esse tipo de trabalho experimental poderá exercitar-se nos conceitos acima, resolvendo o seguinte problema:
Uma esfera rola por um plano inclinado que termina num trecho horizontal. Ao chegar ao final do plano a esfera adquire uma
velocidade v com a qual é lançada no espaço, já que a parte horizontal do plano inclinado se acha a uma altura H acima de outro
plano horizontal. Desse modo a esfera cai sobre o plano π a uma
distância s do ponto O que é a projeção vertical do ponto do plano
inclinado por onde sai a esfera. A distância s será denominada
alcance da esfera sobre o plano. É óbvio que s será função da altura h de que rola a esfera sobre o plano inclinado, s = f (h), ou
h = f1 (s). Veja a Fig. 12.25.
O estudo teórico do problema leva a uma interdependência linear entre h e s2 : h = ks2 . O problema experimental será obter
diferentes valores de h, hi (5 valores, por exemplo), e os respectivos alcances si , levá-los a um gráfico, e verificar se de fato se
obtém uma reta passando pelo origem dos eixos: (xi , yi ) = (s2i , hi ).
Em seguida, aplicar o método dos mínimos quadrados para obter a expressão h = ks2 , calcular o valor de k e compará-lo com a
“ADT-MF” — 2005/11/7 — 8:51 — page 480 — #480
480
Capítulo 12. Movimento periódico e Regressão linear
Figura 12.25: Esfera que rola por um plano inclinado e que segue em queda livre com
velocidade de lançamento horizontal.
da fórmula obtida teoricamente em função dos parâmetros experimentais medidos experimentalmente.
No Laboratório que o estudante está utilizando, o plano inclinado é realizado por uma “calha” que, encurvada próxima a uma das extremidades, fica
com uma forma que se assemelha à do plano inclinado da Fig. 12.25, uma esfera poderá rolar pela calha sem dela sair.
O estudante montará a calha na Estrutura do Laboratório Portátil conforme
indica a Fig. 12.26. A extremidade A da parte mais longa da calha deverá ficar
fixada entre as roscas dos dois pegadores presos a um tubo pequeno fixado à
Estrutura. Para garantir que a extremidade B fique na horizontal coloque um
fia a prumo roçando a extremidade B e de tal modo que o ângulo entre essa
parte final da calha e o fio seja de 90◦ . O fio de prumo serve também para
indicar num papel sob a base C da Estrutura a origem O de um sistema de
coordenadas Osu, o eixo Os ba direção do eixo da calha e Ou ortogonal a Os.
Uma esfera colocada na parte inclinada da calha rolará por ela projetando-se
no espaço ao sair pela extremidade B, e irá atingir um ponto de coordenada si
sobre o eixo s, sua coordenada u terá pequenos valores positivos ou negativos.
A distância dada pelo segmento Osi será o alcance da esfera ao rolar pela
calha a partir do ponto Pi sobre a calha e previamente escolhido. Se deixarmos
a esfera rolar do ponto Pi a partir do repouso, o alcance si poderá variar para
repetidas determinações, 5 por exemplo, deve-se tomar a média desses valores
si j , j = 1,2,3,4, 5 e que será indicada simplesmente por si .
Vejamos agora a altura de que rola a esfera, veja Fig. 12.27. Na figura fizemos o esquema da calha e da base que deve ser horizontal. A altura hi de que
cai a esfera para projetar-se no espaço na saída da calha é a diferença zi−z0 = hi
entre a cota zi e a cota z0 de seu centro de gravidade ao sair da calha em B. A
“ADT-MF” — 2005/11/7 — 8:51 — page 481 — #481
12.9. Aplicação ao exemplo do pêndulo simples
Figura 12.26: Esquema para montagem do dispositivo experimental.
Figura 12.27: Esquema para montagem do dispositivo experimental.
481
“ADT-MF” — 2005/11/7 — 8:51 — page 482 — #482
482
Capítulo 12. Movimento periódico e Regressão linear
Figura 12.28: Esquema para montagem do dispositivo experimental.
cota z pode ser a altura de que se eleva o centro de gravidade da esfera relativamente à base da estrutura, é claro ainda que hi será simplesmente a diferença
entre a cota z0i do ponto sob a parte inferior da calha correspondente a cota zi
e a cota z00 da parte inferior da extremidade horizontal da calha, o que é mais
fácil de determinar.
Determinação da origem O do alcance s. O ponto O sobre a mesa, na qual
está a montagem da experiência, poderá ser determinado seja pelo fio a prumo,
seja deixando cair a esfera sobre o papel destinado à determinação dos alcances, desde que seu centro de gravidade coincida com a extremidade B da calha
(ver Fig. 12.28). A marcação desses pontos far-se-á simplesmente colocandose um papel carbono com a face sensível voltada para o papel destinado a
marcação dos alcances. A esfera ao cair sobre o carbono marcará no papel o
ponto onde ela caiu. A altura de que cai a esfera sobre o papel quando ela sai
da calha será indicada por H e é constante. H poderá ser medido da extremidade de B até a superfície horizontal onde se encontra o papel. O alcance si
deverá ser a média de 5 ou 6 determinações sucessivas do alcance s ao deixar
a esfera rolar do mesmo ponto Pi de altura hi outras tantas vezes, supondo-se
que a altura hi seja sempre a mesma cada vez que se coloca a esfera sobre Pi :
(Veja Fig. 12.29)
si1 + si2 + . . . + si6
si =
.
6
Feita a descrição da experiência vejamos a relação entre o alcance s e a
altura h.
Ao rolar da altura hi sobre a calha a esfera de raio R tem na posição hi uma
energia potencial mghi , em que g é a aceleração da gravidade e m a massa da
esfera; por outro lado, a energia cinética da esfera é igual a 21 mv2 + 21 Iω2 , em
que I é o momento de inércia da esfera em relação ao eixo de rotação que passa
pelo seu centro de gravidade, ~v a velocidade 14 de seu centro de massa e ω a
14
u
Como de hábito, estamos denotando vi = |~vi |.
“ADT-MF” — 2005/11/7 — 8:51 — page 483 — #483
483
12.9. Aplicação ao exemplo do pêndulo simples
Figura 12.29: Esquema para montagem do dispositivo experimental.
velocidade de rotação em torno do eixo citado. Deste modo, pelo Princípio da
Conservação da Energia, não havendo deslizamento, ao chegar à extremidade
B, teremos
mghi = 12 mv2i + 21 Iω2i ,
como 15 vi = Rωi e como 16 I = 25 mR2 , vem
mghi =
1
2
mv2i +
1 2
2 5
mR2
v2i
R2
=
1
2
mv2i + 15 mv2i =
7
10
mv2i .
Portanto
ghi =
7 2
10 vi ,
ou
v2i =
10
7
ghi .
(12.22)
A velocidade ~vi pela posição B da calha é horizontal, deste modo, se ti é o
intervalo de tempo para a esfera atingir o papel, teremos:
H=
1
2
gt2
e
v2i =
1 gs2i
2 H
Donde, feitos os cálculos,
e pela equação (12.22)
v2i =
15
16
10
7
ghi =
si = vi ti .
g
.
2Hs2i
u Não há deslizamento entre a esfera e a superfície da calha.
Momento de inércia da esfera em relação a um diâmetro.
“ADT-MF” — 2005/11/7 — 8:51 — page 484 — #484
484
Capítulo 12. Movimento periódico e Regressão linear
Logo
!
7 2
s ,
hi =
5H i
isto é,
hi = ks2i .
Temos assim uma relação linear entre s2 e h. A relação de interdependência é
assim do tipo y = ax, em que y = h e x = s2 , ou melhor, Y = h e X = s2 , tendo-se:
7
Y = aX, em que a = 5H
.
O estudante deverá determinar experimentalmente os valores Yi = hi e
Xi = s2i , e levá-los a um gráfico para verificar se eles sugerem uma reta que
passa pela origem. Em seguida, pela aplicação do método dos mínimos quadrados, calcular as retas de regressão, o coeficiente de correlação e o coefici7
ente angular, a, da reta Y = aX, comparando-o com o valor a = 5H
calculado a
partir do valor medido de H.
Observação: Físico Teórico e Físico Experimental
Podemos dividir o problema anterior em duas partes, uma teórica e outra experimental. Na parte teórica, obtivemos a expressão do alcance s da esfera que
rola num plano inclinado de uma altura h e é lançada no espaço com velocidade
7
horizontal. A fórmula que relaciona essas grandezas é h = ax2 , em que a = 5H
é constante, existe portanto uma interdependência linear entre h, altura de que
rola a esfera, e o quadrado de seu alcance s, teoricamente. Na parte experimental, monta-se uma experiência para medir os alcances de uma esfera lançada
horizontalmente no espaço, caindo de uma altura H sobre um plano horizontal,
os lançamentos são obtidos fazendo-se a esfera rolar de uma altura h sobre um
plano inclinado. Experimentalmente, obtém-se os alcances s correspondentes
a diferentes alturas h de que a esfera rola sobre o plano inclinado. Em seguida,
procura-se obter por meio de gráficos, e do método dos mínimos quadrados,
qual a lei de interdependência entre as variáveis x = s2 e y = h, obtendo-se uma
expressão do tipo h = as2 , em que a é uma constante. Experimentalmente ainda
podemos, fazendo variar H, obter a expressão a = 7/5H. Teríamos então uma
lei empírica relacionando as grandezas h e s2 : h = (7/5H)s2 .
Poderia ocorrer ainda que o Físico Teórico, que calculou através das leis do
7 2
s , recorresse a um Físico Experimenmovimento a expressão teórica h = 5H
tal para que ele verificasse experimentalmente sua fórmula. Nesse caso ele
explicaria ao Físico Experimental o problema através de um esquema como
o da Fig. 12.25, em que as grandezas h, s e H ficam bem claras e diria ao
Físico Experimental que tinha resolvido teoricamente o problema, obtendo a
7 2
fórmula h = 5H
s , e que gostaria que o Físico Experimental confirmasse experimentalmente a fórmula obtida. O Físico Experimental tendo entendido o
“ADT-MF” — 2005/11/7 — 8:51 — page 485 — #485
12.9. Aplicação ao exemplo do pêndulo simples
problema consubstanciado no gráfico da Fig. 12.22, procuraria montar uma experiência para testar a fórmula e desenvolveria então a montagem ilustrada na
Fig. 12.26. Obtidos os dados experimentais faria seu tratamento por meio de
gráficos e do método dos mínimos quadrados, verificando assim a fórmula obtida pelo Físico Teórico, mesmo que não tivesse (ou não soubesse) nenhum
conhecimento da parte teórica que levou o outro à fórmula 17 apresentada. Essas duas situações podem ocorrer na Física, a obtenção de uma fórmula empírica e a verificação de uma fórmula puramente teórica. O exemplo citado é
trivial e o estudante deste curso pode facilmente executar tanto a parte teórica
como a experimental; entretanto há casos em que o problema teórico é extremamente complicado, só entendido por especialistas e que por isso mesmo
não terão conhecimentos experimentais também especializados para realizar
a experiência que comprove seus resultados teóricos. O Físico Experimental,
sem entender da teoria concernente, pode desenvolver a parte experimental e
verificar o acerto ou não da teoria. Por outro lado, um Físico Experimental
pode no estudo de certos fenômenos chegar a uma expressão empírica válida,
cabendo ao Físico Teórico dar-lhe a devida explicação teórica. E a Física vai
assim progredindo.
Observação: Sobre a montagem
O estudante deve tomar cuidado porque se a esfera tiver um raio R maior do
que a calha, ela pode rolar apoiando-se não no fundo da calha, mas sobre a
borda e nesse caso é necessário medir a distância r desse apoio ao eixo de
rotação que passa pelo centro de massa da esfera, pois então v = ωr, r < R.
Obtenha teoricamente a nova expressão nesse caso.
17
u O Físico Experimental costuma tratá-la por “fórmula”, o Físico Teórico prefere o
termo “equação”.
485
“ADT-MF” — 2005/11/7 — 8:51 — page 486 — #486
486
“ADT-MF” — 2005/11/7 — 8:51 — page 487 — #487
Capítulo 13
Elasticidade ∗
Seja um sólido C0 e suponhâmo-lo submetido
à ação de forças
F~i que mantém
,→
P ,→
P ~
o em equilíbrio, isto é, i Fi = 0 e i Mi = 0, em que Mi é o momento da
força F~i em relação a um ponto qualquer.
O corpo C0 fica submetido a forças internas. Para estudarmos essas forças
internas vamos tomar uma região no,→ interior do corpo dividindo-a em duas
porções 1 e 2, por uma superfície ∆S . Cada região fica submetida a um conjunto de forças sobre a superfície e de tal modo que elas também fiquem em
equilíbrio. Em tal caso a região 2 exerce sobre a 1 uma força ∆F~ através da
Figura 13.1: Forças aplicadas em um corpo C0 , sendo ∆F~ a força que atua na superfície plana (hachurada) ∆S que contém o ponto P.
~ diretamente
superfície ∆S e vice-versa, a 1 exerce sobre a 2 uma força −∆F,
oposta e de intensidade igual. Veja Fig. 13.1. Essa força pode ter uma dire∗
u Este Capítulo corresponde às páginas 54–64 de uma apostila datilografada sob o título
Acústica, sem data, possivelmente 1980.
487
“ADT-MF” — 2005/11/7 — 8:51 — page 488 — #488
488
Capítulo 13. Elasticidade
ção qualquer, não sendo em geral normal à superfície ∆S . Vamos supor que a
força esteja aplicada no ponto P da superfície ∆S . Podemos decompô-la em
duas componentes, uma ∆F~n normal ao plano de ∆S e outra ∆F~t paralela a ∆S .
Denomina-se esforço específico sobre ∆S à razão 1 ∆F/∆S , e, para cada uma
das componentes, teremos os esforços específicos ∆Fn /∆S e ∆Ft /∆S que se
denominarão, respectivamente, de esforço específico médio normal e esforço
específico médio tangencial, de corte ou de cisalhamento, respectivamente,
sobre ∆S . Observe-se que se mudarmos a orientação da superfície ∆S , em
torno de P, o esforço específico pode variar, isto é, assumir valores diferentes.
13.1
Esforço Específico num ponto
Para se definir esforço específico num ponto P da superfície ∆S basta obter
dF ∆F
,
=
s = lim
∆S →0 ∆S
dS P
analogamente para os esforços específicos tangencial e normal. É claro que o
esforço específico num ponto dependerá da orientação da superfície ∆S .
13.2
Deformação específica
Sob a ação do mencionado conjunto de forças as dimensões do volume V contido em 1 e 2 vão variar, assim se o volume anterior à aplicação das forças
é V, com a aplicação das forças ele sofrerá uma variação ∆V. A razão ∆V/V
se denomina deformação específica média no volume V. Podemos relacionar
a deformação específica com o esforço específico que a produziu, entretanto
esse estudo é bastante complicado e será deixado para mais tarde, aqui vamos
examinar apenas os casos mais simples.
13.3
Tração e compressão
Seja uma barra de secção reta de área S e comprimento L, presa por uma
extremidade. Suponhamos que se aplique uma força F~ na outra extremidade,
observa-se em conseqüência um acréscimo ∆L em seu comprimento, no caso
da Fig. 13.2 o esforço é de tração e se a força tivesse sentido contrário o esforço
1
u
~
Estaremos denotando F = |F|.
“ADT-MF” — 2005/11/7 — 8:51 — page 489 — #489
13.3. Tração e compressão
específico seria de compressão, haveria um decréscimo no comprimento da
barra, isto é, ∆L = −|∆L|.
Figura 13.2: Força F~ aplicada em uma barra de comprimento L e secção reta de área
~ provocando o acréscimo ∆L no seu comprimento;
S , um acréscimo ∆F~ à força F,
sendo ∆F~ e F~ normais à secção reta.
A força ∆F~ é normal à secção reta ∆S da barra e o esforço específico normal médio sn = ∆F/∆S , a deformação específica é ∆L/L. Se fizermos o estudo
da variação do esforço específico em função da deformação específica, veremos que ele pode ser representado pelo gráfico da Fig. 13.3. Até um certo ponto
Figura 13.3: Gráfico do esforço específico em função da deformação em uma haste;
o ponto C caracteriza o limite de elasticidade.
C do gráfico o esforço específico s é função linear da deformação específica
ε = ∆L/L. A região é abrangida pela chamada Lei de Hooke: 2 A deformação é
proporcional ao esforço específico e cessa quando ele cessa, a não ser que se
2
Robert Hooke (1635–1703), matemático e astrônomo inglês; a lei de Hooke foi
descoberta em 1660.
489
“ADT-MF” — 2005/11/7 — 8:51 — page 490 — #490
490
Capítulo 13. Elasticidade
tenha atingido certo valor chamado “limite de elasticidade”.
Assim, o esforço é proporcional à deformação, donde:
s = Y ε , ou
∆F
∆L
∆F/∆S
=Y
, portanto Y =
.
∆S
L
∆L/L
A constante de proporcionalidade Y se denomina módulo de elasticidade de
tração ou de compressão, ou ainda módulo de Young 3 .
13.4
Corte ou cisalhamento
Esforço específico de corte, cisalhamento ou tangencial No esforço específico de corte de uma força atua paralelamente à superfície, o corpo de
comprimento L se desvia de um ângulo ϕ, o qual é a deformação específica
produzida, e assim o módulo de elasticidade de corte ou módulo de rigidez
será
∆F/S
,
G=
ϕ
como ϕ é muito pequeno, podemos pôr:
Figura 13.4: Ilustração para o cisalhamento que provoca o desvio de um ângulo ϕ
muito pequeno.
ϕ=
e assim teremos:
G=
∆L
,
L0
∆F/S
.
∆L/L0
3
Thomas Young, (1773–1829), físico e médico inglês; ele também foi Egiptólogo, tendo
decifrado a Pedra Rosetta.
“ADT-MF” — 2005/11/7 — 8:51 — page 491 — #491
491
13.5. Esforço sobre um volume
13.5
Esforço sobre um volume
Módulo volumétrico de elasticidade Se um corpo de volume V é mergulhado em um líquido de tal modo que se possa aumentar (ou diminuir) a pressão à qual ele se acha submetido, isto é, passa de P para P+∆P, seu volume
sofre um acréscimo −∆V se ∆P é positivo (decrescendo o volume), ou sofre
um acréscimo (positivo) ∆V se ∆P é negativo. O esforço específico devido
a variação de pressão ∆P = ∆F/S , correspondendo à deformação específica
∆V/V, é
∆P
∆P
B=
= −V
,
−∆V/V
∆V
ou ainda, tomando o limite quando V tende a zero:
B = −V
dP
.
dV
O sinal negativo torna B sempre positivo, pois o a razão entre o acréscimo da
pressão pelo acréscimo do volume é sempre negativa.
Se o corpo é um líquido, costuma-se usar o inverso do módulo de elasticidade K = 1/K, o qual se denomina coeficiente de compressibilidade:
K=−
1 dV
.
V dP
De um modo geral B se denomina módulo volumétrico de elasticidade.
Observação Em Resistência dos Materiais em vez de esforço específico se
usa a palavra tensão, em vez de forças internas se usa o termo esforço, em vez
de deformação específica se usa simplesmente deformação.
13.6
Torção
Para estudar a torção vamos considerar um cilindro de um material qualquer,
de altura h e raio R. Veja Fig. 13.5. Suponhâmo-lo preso rigidamente pela base
inferior e que por um processo qualquer fazemos sua base superior girar de um
ângulo θ, por exemplo, há um dispositivo que prende a parte superior e com o
qual podemos aplicar um conjugado à base superior, fazendo girar do ângulo
θ, torcendo-o, a base inferior fixa. A linha AB riscada no cilindro gira e passa
à posição AC, girando em torno de A de um ângulo ϕ, diz-se que houve uma
torção do cilindro. O ângulo ϕ é a deformação específica por torção.
“ADT-MF” — 2005/11/7 — 8:51 — page 492 — #492
492
Capítulo 13. Elasticidade
Para analisarmos tanto a deformação específica como o esforço específico,
vamos considerar no cilindro uma camada cilíndrica de raios r e r + dr, veja
Fig. 13.6. Quando se torce a base superior do cilindro, essa camada sofre um
Figura 13.5: Cilindro de altura h e raio
R, preso rigidamente pela base inferior;
indica-se o binário que gira a base superior do ângulo θ.
Figura 13.6: O cilindro de Fig. 13.5 e a
camada de espessura dr.
deslocamento na parte superior igual a B0C 0 , esse deslocamento poderá ser
facilmente analisado se considerarmos a camada cortada ao longo de A0 B0 ,
tubo esse que podemos abrir e transformar numa camada plana como na Fig. 13.7. Vê-se que p comprimento da pase superior da camada é 2r, sua espessura
sendo dre sua área dS = 2r dr. Ao torcermos o cilindro, a linha A0 B0 descreve
em torno do ponto A0 um ângulo ϕ0 . A camada planificada se desloca na parte
superior de B0C 0 . É fácil ver assim que a deformação foi produzida por uma
força paralela à face superior e distribuída sobre ela, trata-se portanto de um
esforço específico de corte ou cisalhamento, em que a deformação específica
é o ângulo ϕ0 . O deslocamento B0C 0 = L ϕ0 , tendo em vista que ϕ0 é muito
pequeno. Por outro lado, se a base superior girou de um ângulo θ, então B0C 0 =
r θ, veja Fig. 13.7. Suponhamos que a força que atua sobre o elemento dS da
superfície da base superior da camada tubular cilíndrica seja d f , o esforço
“ADT-MF” — 2005/11/7 — 8:51 — page 493 — #493
493
13.6. Torção
Figura 13.7: À esquerda, a camada cilíndrica inferior da Fig. 13.6; à direita sua secção
reta.
específico sobre essa área será d f /dS , a deformação correspondente sendo ϕ0 .
Então como já vimos
1 df
,
G= 0
ϕ dS
donde se tira que
d f = G ϕ dS .
A força d f é ortogonal ao raio r e seu momento em relação ao eixo do cilindro
é:
r d f = G r ϕ0 dS ,
esse momento é um valor que jaz ao longo do eixo do cilindro. Podemos supor
que a força d f está distribuída em áreas dS 1 . . . dS n com as forças d f1 . . . d fn
e tais que a soma de seus momentos em relação ao eixo do cilindro seja igual
ao momento de d f :
n
X
ri d fi = r d f ;
i=1
teríamos ainda para cada elemento de área dS i :
G=
1 d fi
ϕ0 dS i
A soma dos momentos sendo:
X
ou
d fi = G ϕ0 dS i .
ri G ϕ0 dS i = r d f ,
“ADT-MF” — 2005/11/7 — 8:51 — page 494 — #494
494
Capítulo 13. Elasticidade
P
P
mas ri = r, constante, e assim dM = r d f = r G ϕ0 dS i , mas dS = dS i ,
segue-se que
dM = r d f = r G ϕ0 dS = G ϕ0 2π r2 dr .
Como B0C 0 = L ϕ0 = r θ, logo ϕ0 = rLθ , segue-se que
dM =
1
2π G θ r3 dr .
L
É claro que o cilindro submetido à tensão poderá ser dividido em camadas
cilíndricas coaxiais com o cilindro e de espessura dr, às quais pode ser aplicado
o mesmo raciocínio e os momentos das forças que atuam sobre as áreas das
bases de cada uma têm o mesmo sentido e direção do eixo do cilindro, portanto
o momento total que faz a base do cilindro girar de θ é dada pela integral
Z
Z R
2πGθ
2πGθ 1 4
M=
dM =
r3 dr =
R
L
L 4
0
!
2πGr4
M=
θ = Kθ,
L
vemos que ele é função linear de θ, pois
K=
2πGr4
L
é constante.
“ADT-MF” — 2005/11/7 — 8:51 — page 495 — #495
Capítulo 14
Aplicações práticas – oscilações
14.1
Oscilação de um sistema por torção
Um fio de aço de comprimento L é preso pelas extremidades a duas pinças e
colocada na vertical, a pinça superior presa à estrutura do Estojo, veja Fig. 14.1.
A pinça inferior fixa pelo centro de gravidade de uma hate grande do Estojo.
Figura 14.1: Oscilação harmônica
de constante elástica de torção K = (πGR4 )/(2L)
√
e freqüência angular ω = K/I, sendo G o módulo de rigidez do fio, R o raio de sua
secção reta e L seu comprimento.
Afastada da posição de equilíbrio pela aplicação de um conjugado de momento
M, a haste gira de um ângulo θ, ficando então em equilíbrio. O conjugado
495
“ADT-MF” — 2005/11/7 — 8:51 — page 496 — #496
496
Capítulo 14. Aplicações práticas – oscilações
aplicado M é assim equilibrado pela reação do fio com um conjugado M 0 =
−K θ. De fato, ao fazer girar a haste, o fio que a prende sofre uma torção e,
como se viu, quando a torção é de um ângulo θ, o fio reage elasticamente com
um conjugado proporcional ao ângulo de torção θ:
M 0 = −K θ,
o sinal negativo na equação advém de que o conjugado atua em sentido contrário ao do ângulo θ para restaurar a condição de equilíbrio anterior, com θ = 0;
é um conjugado restaurador da posição de equilíbrio. Suponhamos então que
se elimine o conjugado aplicado M, nesse caso, passa a atuar sobre a haste
apenas o conjugado M 0 = −K θ, o qual faz a haste girar em sentido contrário a
θ, donde o sinal negativo, imprimindo-lhe uma aceleração (angular) α. A 2a lei
de Newton para o movimento de rotação é M = I α, em que I é o momento de
inércia da haste em relação ao eixo de rotação, nesse caso o fio.
Como M = −K θ, segue-se que I α = −K θ, ou I α+K θ = 0, do que se segue
que
d2 θ
d2 θ
I 2 + K θ = 0 , pois α = 2 ,
dt
dt
temos assim a equação diferencial
d2 θ K +
θ = 0,
I
dt2
que é a equação diferencial do MHS para o deslocamento angular, já que K/I
é constante. A freqüência angular de oscilação será, como já vimos:
r
1
K
K
.
ω2 = , ou N =
I
2π
I
A haste oscilará com movimento harmônico simples (MHS) de freqüência
r
1
K
πGR4
N=
, em que K =
,
2π
I
2L
sendo G o módulo de rigidez do fio, R o raio da sua secção reta, e L o seu
comprimento.
Exercício 14.1. Fizemos: L = 4,4 cm, R = 0,015 cm, o fio sendo de aço inoxidável, do mesmo material das molas do estojo. A hate usada era o tubo longo,
de comprimento Lh = 31,0 cm e massa mh = 55,1 g. Temos
ω2 =
K
πGR4
πGR4
8π2 N 2 LI
, K=
⇒
= 4π2 N 2 I , donde: G =
.
I
2L
2L
R4
“ADT-MF” — 2005/11/7 — 8:51 — page 497 — #497
14.1. Oscilação de um sistema por torção
Determinou-se o intervalo de tempo ∆T para 100 períodos: ∆T = 387,0 s,
1
donde N = 0,2584 Hz; I = 12
mh Lh2 = 4412,6 g cm2 = 4412,6×10−7 kg m2 ;
Lh = 4,4 cm; R = 0,015 cm = 15×10−6 m. Feitos os cálculos:
G = 0,644 × 1012 ≈ 6,4×1010 N/m2 .
Realize a montagem do dispositivo ilustrado na Fig. 14.2 e as medições pertinentes.
Figura 14.2: Dispositivo para medições
Exercício 14.2. Faça a determinação do módulo de rigidez do fio, G, estaticamente.
Aproveitando-se a montagem anterior retirou-sea pinça inferior a haste de
31 cm substituída por um tubo pequeno, ao qual eram aparafusados 2 parafusos nas extremidades. Um fio de fio em aço mantinha a pinça inferior na
posição vertical, quando um outro fio puxava uma extremidade do tubo na direção ortogonal ao eixo do tubo e fazendo-o girar de um ângulo θ = π2 rad,
pela aplicação de um momento, para tanto, esse momento era provido por uma
força F~ exercida pelo fio e medida pelo dinamômetro.
Dados
– comprimento do fio de aço entre duas pinças: 4,3 cm;
– raio da seção reta do fio: 15×10−3 cm;
~ = 12,9 gf;
– força aplicada no fio: |F|
– distância da reta suporte da força ao fio de aço: r = 1,5 cm;
– ângulo de torção: θ = π2 rad.
497
“ADT-MF” — 2005/11/7 — 8:51 — page 498 — #498
498
Capítulo 14. Aplicações práticas – oscilações
Temos: M =
G=
πR4Gθ
, logo
2L
2ML
2 (1,5 × 12,9 × 980) × 4,3
∴ G=
πr4 θ
π2 1 10 × 10−3 4
2
= 6,5 × 1011 dyn/cm2 = 6,5 × 1010 N/m2 .
O que confere com o resultado anterior.
Exercício 14.3. Use outros materiais, fios finos para prender nas pinças de
aço, cobre e latão. determine os respectivos módulos de rigidez e compare
com as tabelas (cf. Tab. 14.1).
14.2
Deflexão de uma haste
Vimos no Cap. 1, pág. 53, que a deflexão da extremidade livre de uma haste,
presa pela outra extremidade, era dada pela fórmula:
!
x3
d=
p,
3EI
em que x é a distância do ponto em que se coloca o peso p, próximo à extremidade livre, até o ponto de fixação da haste; E é o módulo de Young do material
que constitui a haste e I é o momento de inércia da secção reta em relação ao
eixo que jaz sobre área que passa pelo baricentro da área e é ortogonal ao eixo
da haste. Temos
3EI
p = f = K x , em que K = 3 .
x
Mantendo x constante, K é constante, e assim a força que produz a deflexão
é proporcional à deflexão. Segue-se que se a ponta da haste é desviada da
posição de equilíbrio e abandonada às forças “restauradoras” do equilíbrio ela
vai executar um MHS. Uma partícula de massa m, colocada na extremidade
da haste, ficará sujeita a uma força f proporcional ao deslocamento y e de
sinal r
contrário, executará portanto um MHS: f = −Ky , a freqüência angular
K
3EI
ω2 mx3 4π2 N 2 mx3
ω=
, portanto ω2 =
=
.
,
logo
E
=
m
3I
3I
mx3
Exercício 14.4. Retiramos da montagem anterior as pinças com o fio, e fixouse uma delas no tubo vertical da Estrutura, veja Fig. 14.3. A outra pinça ficou
livre para oscilar. Afastando ligeiramente da posição de equilíbrio ela entrou
“ADT-MF” — 2005/11/7 — 8:51 — page 499 — #499
499
14.2. Deflexão de uma haste
Tabela 14.1: Constantes elásticas de alguns sólidos
Material
Aço
Aço inox
Bronze
Bronze fosforoso
Chumbo
Cobre
Duralumínio
Estanho
Ferro
Níquel
Prata
Ouro
Tungstênio
Vidro crown
Silica
Zinco
Mód. de Young
(a×1010 N/m2 )
a
20
16,4
10,5
12
1,5
10 - 13
6,9
4 - 5,4
9
20 - 21
7,7
8
35
6
7
8
Figura 14.3: Fio de aço inox sustentando uma pinça.
Mód. de rigidez
(b×1010 N/m2 )
b
8
6,4
3,7
4,4
0,54
4,2
2,8
1,7
–
7 - 7,5
2
2,8
15
2,5
3,5
3,6
Mód. volumétrico
(c×1010 N/m2 )
c
16
–
9
–
0,8
14
–
–
9,6
–
–
16,5
–
5
–
3,5
Figura 14.4: Fio de aço inox preso
sustentando carga zero.
“ADT-MF” — 2005/11/7 — 8:51 — page 500 — #500
500
Capítulo 14. Aplicações práticas – oscilações
em oscilação. Dados: comprimento do fio x = 4,3 cm, massa da pinça 16 g;
raio da secção reta do fio R = 15×10−3 cm.
Contaram-se 50 oscilações em 25 s, donde N = 2 Hz. Determine o módulo
de Young E.
1
πR4
Resposta: R = (πR2 )R2 =
.
4
4
2
3
2
2
ω mx
4 × π (2) × 16 × (4,3)3
=
= 1,68 × 1010 N/m2 .
E=
3I
3 × π4 × (15 × 10−3 )4
Exercício 14.5. Determine E estaticamente aplicando a fórmula:
d=(
x3
)p .
3EI
Retirou-se a pinça oscilante da montagem anterior (Fig. 14.3), o fio ficou
na horizontal, veja Fig. 14.4. Colocou-se uma régua para medir a posição da
ponta livre do fio sem peso na extremidade, em seguida colocou-se uma peso
de 1 gf na extremidade livre à distância de 4,6 cm da fixação. A deflexão foi de
0,5 cm. Temos
E=
(4,6)3 × 980
x3
p=
3dI
3 × 0,5 × π4 (15 × 10−3 )4
= 16 × 1010 N/m2
Resultados comparáveis: discrepância de 5 %.
14.3
Composição geométrica de movimentos
harmônicos
Já tivemos oportunidade de estudar a representação geométrica do movimento
harmônico simples §8.2.6.1, pág. 331.
14.4
Representação geométrica
Suponhamos que um ponto M percorra um círculo com movimento circular
uniforme e que se observe esse movimento de uma certa distância, por exemplo do ponto P1 , veja Fig. 14.5, situado sobre o plano do movimento. Parecerá
que o ponto M percorre o segmento AB num movimento de vai-e-vem, confundindo-se com sua projeção M 0 , de P1 sobre o segmento AB, ortogonal à reta
“ADT-MF” — 2005/11/7 — 8:51 — page 501 — #501
14.4. Representação geométrica
Figura 14.5: Ponto M em movimento circular observado do ponto P1 .
que liga P1 ao centro O do círculo. Partindo da posição M 0 , dirigindo-se para
o ponto A, diminuindo gradativamente sua velocidade à medida que se aproxima de A, chegando a esse ponto, aí pára um instante, voltando em seguida
com velocidade crescente até a altura do centro O do círculo onde parece com
sua velocidade máxima, em seguida sua velocidade volta a decrescer, anulando-se instantaneamente em B e mudando de sinal, voltando ao ponto M sobre
sua trajetória. Esse é o movimento aparente do ponto M, sendo o movimento
real de sua projeção M 0 a partir de P1 sobre AB. Se o ponto P1 está infinitamente afastado do círculo, o segmento de reta AB se confunde com o diâmetro
do círculo e as retas projetantes MM 0 se tornam perpendiculares a esse diâmetro. Nesse caso se diz que a projeção é ortogonal. Posto isto, consideremos
a projeção ortogonal M 0 do ponto M sobre o diâmetro AB e suponhamos que
o ponto M se mova sobre o círculo com movimento circular uniforme, sua
projeção sobre o diâmetro AB, M 0 terá movimento análogo ao descrito anteriormente, veja Fig. 14.6. Tomemos então o ponto O para origem da trajetória
de M 0 e seja α o ângulo T[
OM, em que RT é o diâmetro perpendicular ao diâmetro AB. Sendo r o raio do círculo e |y| a distância OM 0 , ter-se-á y = r sen α.
O ângulo α é o ângulo que OM varre no seu movimento durante o intervalo
de tempo t, e indicando por ω a velocidade angular de M, então α = ωt, logo
y = r sen(ωt). Vê-se que r é o valor máximo de y que podemos representar por
A, colocando a equação de definição do movimento harmônico simples sob
a forma y = A sen(ωt). Desse modo, o movimento harmônico simples de um
ponto M 0 pode ser considerado como a projeção do movimento de um ponto
501
“ADT-MF” — 2005/11/7 — 8:51 — page 502 — #502
502
Capítulo 14. Aplicações práticas – oscilações
Figura 14.6: Projeção ortogonal M 0 do ponto M em movimento circular.
M que se move sobre um círculo de raio r = A com velocidade angular constante, a projeção efetuando-se sobre um diâmetro. É claro que em vez do seno
poderíamos empregar o cosseno, seja considerando o ponto Q em seu movimento, ou o ângulo β = π2 −α, nesse caso o movimento de M 0 seria dado por
y = A cos( π2 − α), ou y = A cos(ωt − π2 ), sabido que cos(−β) = cos β.
O círculo descrito anteriormente se denomina círculo de referência. O
ponto M, ou partícula M, denomina-se partícula girante, e M o ponto ou partícula vibrante.
14.5
Gráfico do movimento harmônico simples
Como já estudamos, páginas 332–336, o gráfico do MHS, vamos estudar aqui
o gráfico do MHS com uma fase inicial.
Tomamos dois eixos ortogonais cartesianos Oxy, sobre o eixo Ox, à esquerda do eixo y, traçamos o círculo de referência, o seu centro ficando sobre
o eixo dos x, veja Fig. 14.7. Assim, dado o MHS
!
2πt π
−
y = A sen(ωt − ϕ) = 10 sen
12 3
podemos, para dar uma certa precisão ao gráfico, dividir a circunferência em
12 partes iguais, a começar do ponto sobre o eixo dos x, tendo em vista que
cada arco dobre a circunferência corresponderá a 1/12 do período T , no exem2π
plo citado, tendo em vista que ω = 2π
12 = 2πN = T , por outro lado a fase inicial
π
◦
ϕ = 3 rad = 60 . Vemos que A = 10 (escala arbitrária), deste modo:
“ADT-MF” — 2005/11/7 — 8:51 — page 503 — #503
503
14.6. Representação complexa do harmônico simples
Figura 14.7: Circulo de referência à esquerda, função y = A sen(ωt−ϕ) à direita.
. quando t = 0, y = 10 sen( −π
3 ) = −10
√
3
2
T
. quando t = 12
temos y = 10 sen( 2π
T ×
. quando t = T6 , y = 10 sen( 2π
T ×
T
6
= −8,7;
T
12
− π3 ) = 10 sen(− π6 ) = − 10
2;
− π3 ) = 0,
a curva se acha deslocada da origem de um segmento igual a T6 , esse intervalo
de tempo é o tempo θ correspondente a fase inicial ϕ e se denomina atraso.
14.6
Representação complexa do harmônico simples
Seja o movimento harmônico simples y = A sen(ωt + ϕ) e consideremos um
círculo de raio A, veja Fig. 14.8.
Figura 14.8: Circulo de referência correspondente a função y = A sen(ωt+ϕ).
“ADT-MF” — 2005/11/7 — 8:51 — page 504 — #504
504
Capítulo 14. Aplicações práticas – oscilações
~ cuja
Podemos considerar o raio do como um vetor de módulo invariável |A|
extremidade M gira com velocidade angular ω constante em torno do ponto O.
A esse vetor denominamos vetor girante. O deslocamento y do movimento
harmônico simples será um vetor ~a de direção invariável e cujo módulo e sentido é dado por y = |~a| sen(ωt + ϕ), sendo assim a projeção ortogonal do vetor
~ sobre o diâmetro do círculo de referência que contém o segmento
girante A
0
OM da Fig. 14.8; ~a recebe o nome de vetor vibrante ou pulsante. Deste modo
~ Essa repreo vetor vibrante ~a é em cada instante o projeção do vetor girante A.
sentação é muito útil no estudo da composição de movimentos harmônicos.
~ o vetor posição do ponto M, é deEm engenharia de circuito o vetor A,
~
nominado fasor, o vetor girante A se denomina fasor rotatório. O termo fasor
é usado para designar o vetor no plano, distinguindo-se do vetor no espaço.
Podemos ainda representar o fasor por um número complexo: z = x+iy, em que
x = A cos(ωt + ϕ) e y = A sen(ωt + ϕ), e trabalhar com a álgebra do corpo dos
complexos para substituir 1 a álgebra vetorial.
14.7
Composição de movimentos harmônicos simples
de mesma direção
14.7.1
Composição de movimentos harmônicos simples de
mesma freqüência, diferença de fase constante, e de
mesma direção.
Diferença de fase – assim se denomina a diferença entre os argumentos ou
fases: ωt + ϕ1 e ωt + ϕ2 dos movimentos harmônicos y1 = A sen(ωt + ϕ1 ) e
y2 = B sen(ωt+ϕ1 ):
ϕ = (ωt + ϕ2 ) − (ωt + ϕ1 ) = ϕ2 − ϕ1 .
Se, por exemplo, ϕ2 > ϕ1 e se a partícula vibrante do movimento 1 se acha
na origem, então a do movimento 2 se acha deslocada de y = B sen(ϕ). Diz-se
que a partícula 2 se acha com um avanço ∆t = ϕ/ω, ou que a partícula 1 se
acha com um atraso ∆t = ϕ/ω em relação à 2a . Observe-se que a equação do
movimento harmônico simples pode ser descrita como y = A sen(ωt−ϕ), o que
inverte a as posições das partículas. Se a diferença de fase for ϕ = π, diz-se que
1
u E substituir a álgebra vetorial com vantagem para esse intento, pois num corpo (qual
quer, em particular o dos complexos) está bem definido o inverso multiplicativo, o que carece de
significado na Álgebra Linear, uma vez que não é possível uma boa definição de multiplicação
entre vetores.
“ADT-MF” — 2005/11/7 — 8:51 — page 505 — #505
14.7. Composição de movimentos harmônicos simples de mesma direção
elas estão em oposição de fase; se ϕ = 2π ou ϕ = 0, diz-se que elas estão em
concordância de fase, ou simplesmente, em fase.
Sejam dois movimentos harmônicos simples
y1 = A sen(ωt − ϕ1 ) e y2 = B sen(ωt − ϕ2 )
e suponhamos que um ponto P, ou uma partícula em P, execute simultaneamente esses dois movimentos. Então para um instante t o vetor vibrante do
1o movimento é y1 = A sen(ωt−ϕ1 ) e o do 2o movimento é y2 = B sen(ωt−ϕ2 ).
Compor os dois movimentos é considerar a partícula ou ponto em vibração
como animada simultaneamente dos dois movimentos, portanto, em cada instante t ela terá efetuado um deslocamento y = y1 + y2 . É claro que a soma
~ B
~ = C~ que é a projeção sobre o eixo y. Para
y1 +y2 = y corresponde a soma A+
dar um exemplo concreto, podemos supor que o ponto P se desloca sobre uma
régua de 10 cm, por exemplo, com equação y1 = A sen(ωt − ϕ1 ), com origem
no ponto médio da régua, por sua vez a régua se desloca na sua direção com
um movimento harmônico simples de equação y2 = B sen(ωt − ϕ2 ) de amplitude B = 15 cm, a origem do movimento estando no ponto O2 , ponto médio
do segmento de comprimento 2B = 30 cm. Desse modo, o ponto P se desloca
sobre a régua com MHS e a régua, por sua vez, se desloca sobre o segmento
2B com MHS, e o ponto P se desloca relativamente ao segmento 2B com movimento composto pelos dois movimentos; o movimento de P em relação ao
ponto médio de 2B, O1 , sendo dado por y = y1 +y2 .
Como os dois movimentos possuem a mesma freqüência ω, a diferença
~eB
~ formam entre si
de fase permanece constante, os dois vetores girantes A
~+B
~ também gira com
um ângulo constante ϕ, portanto o vetor girante C~ = A
a mesma velocidade angular ω, veja Fig. 14.9. A diferença de fase ψ entre o
primeiro movimento e o movimento composto permanece constante. No gráfico do movimento (Fig. 14.10), para facilitar a representação, fizemos a fase
inicial ϕ1 do primeiro movimento igual a zero:
y1 = A sen(ωt) e y2 = B sen(ωt − ϕ2 ) = B sen(ωt − ϕ) .
O atraso do 2o movimento em relação ao primeiro corresponde à diferença
de fase ϕ, e é representado no gráfico da Fig. 14.10 pela linha pontilhada 2, e o
atraso do movimento resultante é representado pela linha pontilhada 1.
Determinação da amplitude C e da fase inicial do movimento composto.
Essa determinação é muito fácil, tendo em vista que corresponde a determina~+B
~ em função dos vetores A
~eB
~ que fazem entre si um
ção do vetor C~ = A
505
“ADT-MF” — 2005/11/7 — 8:51 — page 506 — #506
506
Capítulo 14. Aplicações práticas – oscilações
Figura 14.9: Composição dos movimentos y1 = A sen(ωt) e y2 = B sen(ωt−ϕ).
Figura 14.10: A linha contínua corresponde à superposição dos movimentos 1 e 2
com diferença de fase ϕ.
“ADT-MF” — 2005/11/7 — 8:51 — page 507 — #507
14.7. Composição de movimentos harmônicos simples de mesma direção
ângulo ϕ. Temos:
C 2 = A2 + B2 + 2AB cos ϕ
e
tan ψ =
B sen ϕ
,
A + B cos ϕ
como já se sabe.
14.7.2
Composição de vários movimentos harmônicos simples de
mesma direção, mesma freqüência, e diferença de fase
constante
Sem perda de generalidade, podemos supor que a fase inicial do 1o movimento
seja zero, ϕ0 = 0, e as fases iniciais dos outros sejam ϕ1 , ϕ2 , . . . , ϕi , . . . , ϕn , as
quais serão assim as diferenças de fase entre esses movimentos e o primeiro.
Traçadas os respectivos círculos de referência com os respectivos vetores girantes, tudo se resume a determinar a resultante da soma dos respectivos vetores girantes, o que pode ser feito analiticamente ou pela regra do polígono.
Os vários movimentos podem ser indicados por:
y0 = A0 sen(ωt)
y1 = A1 sen(ωt−ϕ1 ) y2 = A2 sen(ωt−ϕ2 ) . . .
yi = Ai sen(ωt−ϕi )
...
yn = An sen(ωt−ϕn ).
Deste modo a soma vetorial (algébrica, por quê?): y = y0 +y1 + . . .+yn pode ser
Figura 14.11: Superposição de três osciladores harmônicos simples.
representada por: (veja Fig. 14.11)
y = y0 +
n
X
i=1
Ai sen(ωt − ϕi )
e
tan ψ =
y
,
x
507
“ADT-MF” — 2005/11/7 — 8:51 — page 508 — #508
508
Capítulo 14. Aplicações práticas – oscilações
em que ψ é a diferença de fase entre o primeiro movimento e o movimento
resultante, e
x = A0 + A1 cos(ωt − ϕ1 ) + . . . + An cos(ωt − ϕn )
n
X
= a0 +
Ai cos(ωt − ϕi ) .
i=1
14.7.3
Caso particular importante – superposição de osciladores
harmônicos de mesma amplitude, mesma freqüência e
diferenças de fase constantes
~0 , A
~1 ,
Um caso particular muito importante é aquele que os vetores girantes A
~
. . . , An são todos de mesmo módulo, i.e., movimentos harmônicos de mesma
amplitude, e em que cada um representa um em relação ao anterior uma diferença de fase ϕ constante, a freqüência de todos os movimentos sendo a
mesma. É claro que as diferenças de fase em relação ao primeiro movimento
~0 ; A
~1 faz
são respectivamente ϕ, 2ϕ, 3ϕ, . . . , nϕ. Seja portanto o vetor girante A
~0 o ângulo ϕ, A
~2 faz com A
~1 o mesmo ângulo ϕ, . . . , A
~n−1 faz com A
~n
com A
o ângulo ϕ. Como todos os vetores têm o mesmo módulo, então elas formarão
uma poligonal regular que pode ser inscrita em um círculo de raio R, veja Fig. 14.12. Sejam R1 e R2 os raios do círculo citado e cujas extremidades coincidem
Figura 14.12: Superposição de osciladores harmônicos de mesma amplitude, mesma
freqüência e diferenças de fase constante.
“ADT-MF” — 2005/11/7 — 8:51 — page 509 — #509
509
14.7. Composição de movimentos harmônicos simples de mesma direção
com a origem e com as extremidades de A0 . O ângulo θ entre R1 e R2 é igual a
ϕ De fato, veja Fig. 14.13, os dois raios e A0 formam um triângulo isósceles do
mesmo modo que o triângulo formado com os raios R2 , A1 e R3 . Os ângulos δ
Figura 14.13: Geometria da composição de dois MHS de mesma freqüência, mesma
amplitude e mesma diferença de fase.
da base dos triângulos isósceles, o ângulo θ, e o ângulo ϕ guardam as relações:
θ+2δ = 180◦ e ϕ+2δ = 180◦ , logo ϕ = θ.
~i os raios que completam
Na circunferência da Fig. 14.13, para cada vetor A
~i o triângulo R A R formam entre si o ângulo ϕ, como há n vetores
com A
i+1 i i+2
~i , i = 1, 2, . . . , n, a soma desses ângulos dará nϕ.
A
~ que fecha a poligonal A
~0 + A
~1 + . . . + A
~n = A
~ é o vetor resultante,
O vetor A
~
o diâmetro ortogonal à A divide o ângulo nϕ ao meio, bem como o seu replemento, deste modo, veja Fig. 14.14, teremos a/2 = R sen(nϕ/2), mas, pela
Fig. 14.13, se vê que R sen(ϕ/2) = a0 /2, segue-se que:
A=
A0 sen(nϕ/2)
.
sen(ϕ/2)
Se ϕ é muito pequeno, sen(ϕ/2) = ϕ/2, e nesse caso se tem:
A=
nA0 sen(nϕ/2)
.
nϕ/2
(14.1)
Fórmula muito importante na teoria de difração do som e da luz.
Vemos mostrar como se pode usar a álgebra dos complexos para resolver
o problema anterior. Suponhamos n movimentos harmônicos simples (MHS),
com a mesma amplitude A0 = A1 = A2 = . . . = An , e com diferenças de fase em
relação a A0 de ϕ, 2ϕ, 3ϕ, . . . , nϕ. Veja Fig. 14.14.
“ADT-MF” — 2005/11/7 — 8:51 — page 510 — #510
510
Capítulo 14. Aplicações práticas – oscilações
Figura 14.14: Superposição de osciladores harmônicos de mesma amplitude, mesma
freqüência e diferenças de fase constante.
Tomemos um sistema de eixos coordenados ortogonais Oxy em que Ox
tenha a direção e sentido de A0 . É fácil ver que o movimento composto terá
como expressão:
x = A0 + A1 cos(ϕ) + A2 cos(2ϕ) + . . . + An cos(nϕ) .
y = A1 sen(ϕ) + A2 sen(2ϕ) + . . . + An sen(nϕ) .
√
Vamos multiplicar y por i = −1, e somar membro a membro:
x + iy = A0 + A1 (cos(ϕ) + i sen(ϕ)) + . . . + An (cos(nϕ) + i sen(nϕ))
Ou, usando a fórmula de Euler: 2
x + iy = A0 + A1 eiϕ + A2 ei2ϕ + . . . + An einϕ .
Como A0 = A1 = . . . = An temos
x + iy = A0 1 + eiϕ + ei2ϕ + . . . + einϕ ,
que é a soma S n de n termos de uma progressão geométrica:
x + ix = 1 + q + q2 + . . . + qn
em que
Sabemos que3
S n = 1 + q + q2 + . . . + qn =
2
3
q = eiϕ .
qn − 1
.
q−1
u Lembre-se que, pela fórmula de Euler, eiα = cos α + i sen α .
Deduza essa expressão.
“ADT-MF” — 2005/11/7 — 8:51 — page 511 — #511
14.8. Composição geométrica de MHS de freqüências quase iguais
Portanto
x + iy = A0
eniϕ − 1
,
eiϕ − 1
ou aplicando Euler novamente:
A = x + iy =
cos(nϕ) + i sen(nϕ) − 1
× A0 .
cos(ϕ) + i sen(ϕ) − 1
~ teremos o módulo do vetor
Achando-se o módulo do complexo (|A| = AĀ = |A|)
~
resultante A, donde:
(cos(nϕ) − 1)2 + sen2 (nϕ)
× A20
(cos ϕ − 1) + sen2 ϕ
cos2 (nϕ) − 2 cos(nϕ) + 1 + sen2 (nϕ)
× A20
=
cos2 (ϕ) − 2 cos(ϕ) + 1 + sen2 (ϕ)
−2 cos(nϕ) + 2
cos(nϕ) − 1
=
× A20 =
× A20 .
−2 cos(ϕ) + 2
cos(ϕ) − 1
~ 2 = x2 + y2 =
|A|
Mas, 1−cos(ϕ) = 2 sen2 (ϕ/2), analogamente 1−cos(nϕ) = 2 sen2 (nϕ/2), logo:
2 sen2 (nϕ/2)
A2 =
× A20 , se ϕ 0, então
2 sen2 (ϕ/2)
A=
n sen(nϕ/2)
× A0
nϕ/2
que é a fórmula encontrada anteriormente, equação (14.1), por meio da geometria. Essa expressão é usada na difração de Fraunhofer4 da luz.
14.8
Composição geométrica de movimentos
harmônicos simples de freqüências quase iguais
Sejam os movimentos harmônicos simples (MHS) de mesma direção e de
freqüências quase iguais:
a = A sen(ωt)
e
b = B sen(ω1 t − ϕ) ,
sendo ω = 2πN e ω1 = 2πN1 , em que N1 = N − ε, sendo ε uma quantidade muito
pequena. Substituindo-se ω1 por 2π(N − ε), temos:
b = B sen (2π(N − ε)t − ϕ)
= B sen (2πNt − (2πεt + ϕ))
4
Fraunhofer, Joseph von (1787 – 1826), físico alemão.
511
“ADT-MF” — 2005/11/7 — 8:51 — page 512 — #512
512
Capítulo 14. Aplicações práticas – oscilações
fazendo 2πεt + ϕ = ψ(t), vem:
b = B sen (2πNt − ψ(t)) .
Tudo se passa como se os dois movimentos tivessem a mesma freqüência N
e o segundo apresentasse em relação ao primeiro uma diferença de fase ψ(t),
que, em vez de permanecer constante, variasse lentamente com o tempo. Essa
variação é tanto mais lenta quanto menor for o valor de ε; é uma variação
contínua.
O vetor girante C~ tem módulo dado pela expressão:
C 2 = A2 + B2 + 2AB cos(ψ(t)) .
Vemos assim que C~ é uma função do tempo, tendo máximos e mínimos que
resultam quando:
. ψ(t) = 0, 2π, 4π, . . . , 2nπ, máximos; e
. ψ(t) = π, 3π, . . . , (2n + 1)π, mínimos.
No §12.1 caracterizamos movimento periódico e definimos período. O período do movimento no presente caso é o intervalo de tempo decorrido entre
dois máximos ou dois mínimos, pois então o movimento vai repetir-se identicamente. Para um intervalo de tempo entre dois máximos ou dois mínimos o
ângulo descrito será 2π, isto é:
ψ(t2 ) − ψ(t1 ) = 2π, ou:
(2πεt2 + ϕ) − (2πεt1 + ϕ) = 2π ⇒ 2πε(t2 − t1 ) = 2π ⇒ t2 − t1 = 1/ε ,
mas t2 − t1 = T , assim o período é TC = 1/ε, e a freqüência: NC = 1/T = ε =
N − N1
14.8.1
Representação gráfica
Observa-se que quando as amplitudes são quase coincidentes e de mesmo sentido, o movimento resultante será máximo; ao contrário, quando são de sentido
contrário, o movimento resultante é mínimo. Nas vibrações sonoras, dois sons
de freqüências quase iguais, ao se somarem (algebricamente) vão produzir um
som composto em que se ouve um reforço de som seguido de um abrandamento, esses alteamentos e baixamentos do som se denominam batimentos.
“ADT-MF” — 2005/11/7 — 8:51 — page 513 — #513
513
14.9. Composição de MHS de freqüências diversas
Figura 14.15: Superposição de dois MHS de freqüências próximas.
Observação Quando se afina um violão e se põem cordas em uníssono, isto
é, produzindo dois sons de mesma freqüência, se afrouxarmos ligeiramente a
tensão de uma delas, os sons ficarão com freqüências quase iguais e nesse caso
se ouvirá nitidamente o batimento quando as cordas são dedilhadas simultaneamente.
Duas vibrações mecânicas, como veremos mais adiante no estudo da ressonância, poderão apresentar o fenômeno de batimento.
14.9
Composição de movimentos harmônicos simples
de freqüências nitidamente diversas
Sejam dois movimentos vibratórios
y1 = A sen(
2π
2π
t) e y2 = B sen(
t − ϕ) .
T1
T2
Analisaremos separadamente as situações em que a razão
racional ou não.
14.9.1
T1
T2
é um número
Freqüências comensuráveis
Se a razão TT 12 é um número racional, as freqüências dos dois movimentos podem ser consideradas como múltiplas de uma freqüência fundamental:
T 1 N1
pN
=
=
T 2 N2 qN
⇒
N2 = pN e N1 = qN .
“ADT-MF” — 2005/11/7 — 8:51 — page 514 — #514
514
Capítulo 14. Aplicações práticas – oscilações
A freqüência fundamental (N) sendo o máximo divisor comum das freqüências
N1 e N2 ,
Figura 14.16: Superposição de dois MHS de freqüências comensuráveis.
O movimento resultante será nesse caso um movimento periódico não senoidal de freqüência igual a essa freqüência fundamental.
Se os movimentos têm a mesma direção, a Fig. 14.16 ilustra a situação em
que N1 = 2N e N2 = 3N.
14.9.2
Freqüências incomensuráveis
Se as freqüências são incomensuráveis, isto é, se NN21 = TT 12 é um número irracional, as freqüências N1 e N2 não apresentam um divisor comum e o movimento
resultante não é periódico.
Se os dois movimentos têm a mesma direção, o deslocamento resultante
pode anular-se sucessivamente, mas em intervalos de tempo crescente ou decrescente, não havendo mais período.
14.10 Movimentos harmônicos de direções ortogonais
14.10.1 Composição de MHS de mesma freqüência, diferença de
fase e direções ortogonais
Consideremos os dois movimentos harmônicos sobre os círculos de referência
C1 e C2 e paralelos aos eixos coordenados ortogonais x e y. Podemos considerar os dois movimentos como localizados sobre os dois eixos ortogonais, o
“ADT-MF” — 2005/11/7 — 8:51 — page 515 — #515
515
14.10. Movimentos harmônicos de direções ortogonais
Figura 14.17: Superposição de dois movimentos harmônicos ortogonais.
movimento composto será o do ponto P de coordenadas (x, y), veja Fig. 14.17,
animado simultaneamente com os dois movimentos:
x = A sen(ωt) ;
(14.2a)
y = B sen(ωt − ϕ) .
(14.2b)
Essas equações são as equações paramétricas da curva descrita pelo ponto
P, eliminando-se o parâmetro t obtemos a equação cartesiana do ponto P.
Observe-se que a curva descrita por P está encerrada no retângulo de lados
2A e 2B.
Para eliminar-se o parâmetro entre as duas equações procede-se do seguinte modo: elevam-se ambos os membros das equações (14.2) ao quadrado
e somam-se os resultados membro a membro:
x2 /A2 = sen2 (ωt)
y2 /B2 = sen(ωt) cos(ϕ) − sen(ωt) cos(ϕ)
2
= sen2 (ωt) cos2 (ϕ) + sen2 (ϕ) cos2 (ωt)
− 2 sen(ϕ) cos(ϕ) sen(ωt) cos(ωt) ,
“ADT-MF” — 2005/11/7 — 8:51 — page 516 — #516
516
Capítulo 14. Aplicações práticas – oscilações
logo
x2
y2
+
= sen2 (ωt) + sen2 (ωt) cos2 (ϕ) + sen2 (ϕ) cos2 (ωt)
A2 B2
− 2 sen(ϕ) cos(ϕ) sen(ωt) cos(ωt)
Como cos2 (ωt) = 1−sen2 (ωt), substituindo vem:
x2
y2
+
= sen2 (ωt) + sen2 (ωt) cos2 ϕ + sen2 ϕ 1 − sen2 (ωt)
2
2
A
B
− 2 sen ϕ cos ϕ sen(ωt) cos(ωt)
= sen2 (ωt) + sen2 (ωt) cos2 ϕ + sen2 ϕ − sen2 ϕ sen2 (ωt)
− 2 sen ϕ cos ϕ sen(ωt) cos(ωt)
= sen2 (ωt) 1 − sen2 ϕ + sen2 (ωt) cos2 ϕ + sen2 ϕ
− 2 sen ϕ cos ϕ sen(ωt) cos(ωt)
= 2 sen2 (ωt) cos2 ϕ + sen2 ϕ − 2 sen ϕ cos ϕ sen(ωt) cos(ωt) (14.3)
Consideremos x = A sen(ωt) e y = B [sen(ωt) cos ϕ−sen ϕ cos(ωt)], e multipliquemos membro a membro:
x y = AB [sen2 (ωt) cos ϕ − sen ϕ sen(ωt) cos(ωt)] ,
multipliquemos poe 2 cos ϕ e dividamos por AB:
2xy cos ϕ
= 2 sen2 (ωt) cos2 ϕ − 2 sen ϕ cos ϕ sen(ωt) cos(ωt) ,
AB
vemos que o segundo membro dessa igualdade é igual ao primeiro termo do
segundo membro de (14.3), portanto (14.3) se torna:
x2
y2 2xy cos ϕ
+
−
= sen2 ϕ .
AB
A2 B2
(14.4)
Essa é a equação da curva suporte da trajetória (14.2) do ponto P. Representa
uma elipse inscrita no retângulo cujos lados têm comprimentos 2A e 2B, o
dobro das amplitudes.
14.10.2 Estudo dos diversos casos
Caso geral, ϕ qualquer
Quando ϕ é qualquer, isto é, não é um valor notável ( π2 rad, π rad, 2π rad, etc.),
P descreve uma elipse genérica, os máximos e mínimos correspondendo aos
eixos da elipse, veja Fig. 14.18.
“ADT-MF” — 2005/11/7 — 8:51 — page 517 — #517
517
14.10. Movimentos harmônicos de direções ortogonais
Caso em que ϕ = π rad ou ϕ = 3π rad
2
2
Neste caso temos sen2 ϕ = 1 e cos ϕ = 0, e (14.4) se torna:
x2
y2
+
= 1,
A2 B2
(14.5)
sendo a equação de uma elipse cujos são A e B respectivamente. Veja Fig. 14.19.
Figura 14.18: Caso geral.
Figura 14.19: ϕ = π2 ou
3π
2 .
Figura 14.20: ϕ = 0.
Figura 14.22: A = B, ϕ = π2 .
Figura 14.21: ϕ = π.
Caso em que ϕ = 0
Teremos então sen ϕ = 0 e cos ϕ = 1, e (14.4) se torna:
x2
y2 2xy
= 0 ou
+
−
A2 B2 AB
Donde:
x
y
= ,
A B
isto é,
x
A
y=
−
y 2
= 0.
B
B
x.
A
Ou seja, a elipse se degenera numa reta cujo coeficiente angular é B/A. Veja
Fig. 14.20.
“ADT-MF” — 2005/11/7 — 8:51 — page 518 — #518
518
Capítulo 14. Aplicações práticas – oscilações
Caso em que ϕ = π
Teremos então sen ϕ = 0 e cos ϕ = −1, e (14.4) se torna:
x2
y2 2xy
+
+
= 0 ou
A2 B2 AB
x
A
+
y 2
= 0.
B
Donde:
x
y
B
= − , isto é, y = − x .
A
B
A
Ou seja, a elipse se degenera numa reta cujo coeficiente angular é −B/A. Veja
Fig. 14.21.
Caso em que A = B e ϕ = π2
Teremos que (14.4) se torna:
y2 2xy cos ϕ
x2
+
−
= sen2 ϕ .
A2 A2
A2
Quando ϕ = π2 , temos sen ϕ = 1 e cos ϕ = 0, então
x2 + y2 = A2 ,
que é a equação de um círculo de raio A: o retângulo se transforma num quadrado e a elipse num círculo. Veja Fig. 14.21.
14.10.3 Os MHS têm freqüências quase iguais
Sejam os MHS ortogonais
x = A sen(ωt)
y = B sen(ω1 t − ϕ)
em que ω = 2πN ,
em que ω1 = 2πN1 ,
pondo N −N1 = ε e substituindo na equação do segundo movimento:
y = B sen[2π(N − ε)t − ϕ] = B sen[2πNt − ψ(t) ,]
em que ψ(t) = 2πεt. Deste modo, a equação (14.4) se torna:
x2
y2 2 xy cos(ψ(t))
= sen2 (ψ(t)) .
+
−
AB
A2 B2
(14.6)
“ADT-MF” — 2005/11/7 — 8:51 — page 519 — #519
14.10. Movimentos harmônicos de direções ortogonais
Tudo se passa como se os dois movimentos tivessem a mesma freqüência
e o primeiro apresentasse em relação ao primeiro uma diferença de fase ψ(t)
variável com o tempo, a variação sendo mais lenta quanto menor o valor de
ε = N − N1 . A diferença de fase variando lentamente, a extremidade do vetor resultante ~r = xı̂+y ̂ vai descrever uma elipse que se deforma lentamente,
assumindo a curva descrita todos os tipos já estudados na composição de movimentos ortogonais, figuras 14.18, 14.19, 14.20, 14.21 e 14.22. Os mesmos
tipos de curvas se repetem com freqüência ε = N−N1 . Nos quadros da Fig. 14.23
Figura 14.23: Quadros da evolução da superposição de dois MHS de freqüências
quase iguais.
procuramos mostrar as principais características da evolução do movimento.
519
“ADT-MF” — 2005/11/7 — 8:51 — page 520 — #520
520
Capítulo 14. Aplicações práticas – oscilações
O período do movimento corresponde ao intervalo de tempo para que o
movimento volte a se repetir identicamente; na Fig. 14.23 isto corresponde à
série de movimentos desde o 1o quadro ao 8o quadro, o 9o quadro já é repetição
do 1o , o 10o , repetição do 2o , etc., o movimento se repetindo identicamente.
Observe a mudança de sentido de percurso da figura e que se efetua nos segmentos de reta. Na determinação prática do período é mais preciso tomar o
intervalo de tempo ∆t = T entre dois segmentos de reta que são mais bem
definidos.
14.11 Experimento
Já vimos (pág. 454) que a freqüência do pêndulo simples é dada (para pequenas
oscilações) por:
r
g
1
,
N=
2π l
em que l é o comprimento do pêndulo. Para ilustrar tanto o movimento composto de dois movimentos ortogonais de mesma freqüência, como o movimento composto de movimentos ortogonais de freqüências quase iguais, podemos usar um pêndulo simples, capaz de executar simultaneamente os dois movimentos. O movimento resultante de dois movimentos de freqüências quase
iguais pode ilustrar os dois casos; de fato, por exemplo, a elipse no 1o quadro da Fig. 14.23 é repetida muitas vezes, sua deformação para a do 3o quadro
é muito lenta, deste modo ela pode ilustrar o caso do movimento resultante
de dois movimentos de mesma freqüência. Para que o pêndulo execute dois
movimentos ortogonais, podemos fazer uma montagem como a da Fig. 14.24.
Observe que o fio AB fica suspenso do meio B de um outro fio DC preso às
extremidades de uma haste horizontal. Esse fio DC executa um movimento ortogonal ao seu plano com a haste, e o fio AB que prende a massa pendular pode
executar um movimento no plano do fio DC, oscilando em torno do ponto B.
O comprimento do pêndulo que executa o movimento ortogonal a DC é l2 , isto
é, vai desde a reta horizontal que liga os pontos DC até ao centro de gravidade
da massa pendular, e o comprimento l1 do pêndulo que executa o outro movimento ortogonal é o comprimento AB = l1 . Se a diferença l2 −l1 for pequena,
estaremos dentro das condições do problema, e a massa pendular em A executará o movimento resultante de dois MHS ortogonais e de freqüências quase
iguais
Para a freqüência do movimento resultante em termos dos parâmetros do
“ADT-MF” — 2005/11/7 — 8:51 — page 521 — #521
521
14.11. Experimento
Figura 14.24: Diagrama para a composição de dois MHS ortogonais.
sistema, temos :
1
N2 =
2π
logo
r
g
l2
p
p
g/l1
l
N1
= p
= p2
N2
g/l2
l1
e
e
1
N1 =
2π
r
N1 − N2
=
N2
g
,
l1
p
p
l2 − l1
,
p
l1
donde:
p
ε = N1 − N2 =
Portanto:
√
l2 − l1
N2
p
l1
p
l1
1
e T = = p
.
p ε
l2 − l1 N2
p
l ×l
π
T = 2 √ p 1 p2 .
g l2 − l1
Fizemos uma montagem experimental em que l1 = 49,0 cm e l2 = 52,5 cm,
resultando em no valor calculado:
√
3,14
49,0 × 52,5
T =2√
= 41,1 s .
√
√
980 52,5 − 49,9
Na determinação experimental obtivemos: Média de 5 valores: 40 s.
“ADT-MF” — 2005/11/7 — 8:51 — page 522 — #522
522
Capítulo 14. Aplicações práticas – oscilações
14.12 Freqüências nitidamente diversas
Suponhamos dois movimentos ortogonais de freqüências múltiplas de uma
freqüência fundamental: N1 = pN e N2 = qN. O movimento resultante será
um movimento não senoidal (não harmônico simples) de freqüência igual a
freqüência fundamental N. A extremidade do vetor resultante descreve curvas fechadas de formas caprichosas. Essas curvas são chamadas figuras de
Lissajous 5 . São curvas fechadas que se repetem identicamente nos mesmos
intervalos de tempo T , de modo que o movimento é periódico.
Para ilustrar como obter o movimento resultante graficamente, vamos supor dois movimentos ortogonais:
x = 8 sen(
2π
π
2π
t − ) e y = 6 sen(
t) .
2T
3
2T
1
Tem-se N1 = T1 e N2 = 2T
. Deste modo, temos N1 = 2N2 e N2 = N, igual à
freqüência fundamental. Pode-se obter analiticamente o gráfico do movimento
dando-se a t valores convenientes, por exemplo, múltiplos de T/12, calculamse os valores de x(t) e y(t) para cada valor de t. Os pontos do gráfico são assim
obtidos pelas suas coordenadas. Podemos também empregar o método gráfico
com os círculos de deslocamento x e y que correspondem a arcos descritos em
tempos iguais. A diferença de fase ϕ = 60◦ = 2π
3 rad. O círculo C 2 está dividido
em 24 arcos e C1 em 12; enquanto o vetor girante de C1 dá duas voltas em C1 ,
o vetor girante de C2 dá somente uma, portanto os arcos descritos no mesmo
intervalo de tempo serão os de extremidades de mesma numeração, compondo-se os deslocamentos correspondentes, obtém-se a curva C da Fig. 14.25.
Agora suponhamos que os dois movimentos tenham freqüências múltiplas
de freqüências N 0 e N 00 mas que essas freqüências não sejam iguais mas quase
iguais, isto é, difiram de um valor ε muito pequeno. Por exemplo, N1 = 2N 0 e
N2 = 3N 00 , e que N 00 −N 0 = ε muito pequeno.
Para ilustrar esse caso, vamos supor N1 = N 0 e N2 = 2N 00 , e que N 00 −N 0 = ε
muito pequeno. É claro que o movimento resultante não vai apresentar uma
única figura de Lissajous como a da Fig. 14.25, mas vai evoluir para todos os
tipos de figura de Lissajous em que os dois movimentos componentes tenham
freqüências múltiplas da fundamental:
N1 = 1N 0
e
N2 = 1N 00 ,
(14.7)
mas cuja diferença de fase varie com o tempo, lentamente. No caso figurado na
5
Jules Antoine Lissajous (1822 – 1880), matemático e físico francês.
“ADT-MF” — 2005/11/7 — 8:51 — page 523 — #523
14.12. Freqüências nitidamente diversas
Figura 14.25: Composição de MHS ortogonais de freqüências comensuráveis.
Figura 14.26: Figuras de Lissajous.
523
“ADT-MF” — 2005/11/7 — 8:51 — page 524 — #524
524
Capítulo 14. Aplicações práticas – oscilações
Figura 14.27: Figuras de Lissajous.
equação (14.7), a evolução do movimento composto se efetua entre os casos
ilustrados nos quadros da Fig. 14.27.
A freqüência do movimento é N 00 − N 0 = ε correspondendo ao período
T = 1/ε.
Verificação experimental Façamos uma montagem como a da Fig. 14.28
Teremos então:
r
r
1
g
1
g
N1 =
N2 =
2π l1
2π l2
N
2
ε = N 00 − N1
N 00 =
2
1
T= .
ε
Observe que:
√
N1
l2
= √ ,
N2
l1
“ADT-MF” — 2005/11/7 — 8:51 — page 525 — #525
525
14.12. Freqüências nitidamente diversas
Figura 14.28: Dispositivo para composição de MHS ortogonais.
√
√
para que N1 = 2N2 é necessário que l2 = 2 l1 , donde l2 = 4 l1 . Deste modo,
se por exemplo l1 = 15 cm e l2 = 64 cm. Nesse caso se obtém apenas uma figura
de Lissajous cuja forma vai depender das amplitudes dos dois movimentos e
da diferença de fase entre elas, se porém l2 é maior ou menor de 64 cm, então
os dois movimentos não terão mais a mesma freqüência fundamental, ou as
freqüências fundamentais vão diferir de um valor ε muito pequeno, e a curva
vai evoluir entre vários tipos de movimento composto por dois movimentos
em que a freqüência de um é duas vezes a freqüência do outro. Veja Fig. 14.27.
Realização prática A montagem está ilustrada na Fig. 14.28.
Fizemos l1 = 66,25 cm e l2 = 15,15 cm. Para obter a fórmula do período do
movimento composto T = 1/ε. Temos:
r
1
g
N1 =
2π l1
r
N2
1
g
N0 =
=
2
4π l2
1
N2 =
2π
r
g
l2
“ADT-MF” — 2005/11/7 — 8:51 — page 526 — #526
526
Capítulo 14. Aplicações práticas – oscilações
r
r 0
1
g
1
g ε = N − N1 = −
4π l2 2π l1 √ √
√ √ g 1
g l1 − 2 l2 1 =
√
√ − √ =
2π 2 l2
2π 2 l1 l2 l1
√
"
#
1
2 l1 l2
2π
T= = √ √
√ .
ε
g
l1 − 2 l2
Deste modo, sendo: l1 = 66,25 cm e l2 = 15,15 cm, tem-se:
#
" √
63,3620
2π 2 15,15 × 66,25
= 0,2007 ×
T= √ √
= 35,84
√
g
0,3548
66,25 − 2 15,15
T = 36 Hz. Determinação experimental: 31 Hz; discrepância relativa de 16 %.
Observação A precisão tem que ir até o 4o algarismo significativo na determinação de l1 e l2 , o que é muito difícil nas condições da experiência, donde a
grande discrepância entre os resultados teórico e experimental.
14.13 Freqüências incomensuráveis e não múltiplas
de freqüências quase iguais
Se a razão NN12 = TT 21 é incomensurável, isto é, N1 e N2 não apresentam divisor
comum nem são múltiplos de freqüências quase iguais, como no caso anterior,
o movimento resultante não será periódico; as curvas descritas serão curvas
abertas que nunca se reproduzem identicamente, mas vão sempre evoluindo
entre os vários tipos.
“ADT-MF” — 2005/11/7 — 8:51 — page 527 — #527
Capítulo 15
Movimento periódico complexo
Um movimento periódico complexo pode ser a composição (soma) de um certo
número de movimentos harmônicos simples denominados parciais:
y1 = A1 sen(2πN1 t + ϕ1 )
y2 = A2 sen(2πN2 t + ϕ2 )
..
..
.
.
yn = An sen(2πNn t + ϕn ) .
Se os movimentos parciais acima estão colocados em ordem crescente
de suas freqüências, isto é, se N1 < N2 < . . . < Nn , o movimento parcial
y1 = A1 sen(2πN1 t + ϕ1 ) se denomina fundamental.
15.1
Harmônicos
Em acústica há um caso particular muito importante de movimento periódico
complexo, é aquele em que os movimentos parciais y1 , y2 , . . . , yn têm freqüências que são múltiplas de uma mesma freqüência N. Nesse caso os movimentos
parciais se denominam harmônicos:
y1 = A1 sen(2πNt + ϕ1 )
y2 = A2 sen(2π2Nt + ϕ2 )
..
..
.
.
yn = An sen(2πnNt + ϕn ) .
527
“ADT-MF” — 2005/11/7 — 8:51 — page 528 — #528
528
Capítulo 15. Movimento periódico complexo
O movimento de freqüência N se denomina harmônico fundamental ou
harmônico 1 ou ainda primeiro harmônico,os outros: segundo harmônico, terceiro harmônico, . . . , n-ésimo harmônico.
15.2
Série de Fourier
De um modo geral, um movimento periódico complexo de freqüência N pode
ser posto sob a forma de uma soma de movimentos harmônicos (periódicos)
simples, é o que garante o teorema de Fourier1 :
Teorema 15.2.1. Dado um movimento periódico complexo de freqüência N é
sempre possível considerá-lo resultante de um número conveniente de movimentos harmônicos simples cujas freqüências são múltiplas da freqüência N e
cujas amplitudes e diferenças de fase sejam escolhidas convenientemente.
y = a0 + a1 sen(2πNt − ϕ1 ) + a2 sen(2π2Nt − ϕ2 ) + . . . + an sen(2πnNt − ϕn )
em que N é a freqüência fundamental. Essa expressão pode ser escrita compactamente:
n
X
y = a0 +
a j sen(2π jNt − ϕ j ) .
j=1
Como sen(2π jNt − ϕ j ) = sen(2π jNt) cos(ϕ j )−sen(ϕ j ) cos(2π jNt), fazendo-se
a j cos ϕ j = A j , −a j sen ϕ j = B j , a0 = A0 /2, temos:
X
A0 X
+
A j sen( jωt) +
B j cos( jωt) ,
2
j=1
j=1
n
y=
n
em que se fez 2πN = ω.
15.3
Energia no movimento harmônico simples
Seja uma partícula de massa m que descreve um MHS, estudaremos a energia
nesse movimento. Se a partícula descreve um MHS ela está sujeita a uma força
F proporcional ao deslocamento, mas de sentido contrário: F = −ky (considerando o movimento no eixo Oy, sendo F~ = F ̂). Ora, pela 2a lei de Newton:
1
Jean Baptiste Joseph Fourier (1768 – 1830), matemático francês.
“ADT-MF” — 2005/11/7 — 8:51 — page 529 — #529
529
15.3. Energia no movimento harmônico simples
2
F = ma, logo ma = −ky, como a = ddt2y , temos então a equação diferencial do
MHS:
d2 y k
+ y = 0,
dt2 m
como já vimos. Podemos, porém, escrever essa equação em função da velocidade v = dy/dt, pondo:
dv
m
= −ky ,
(15.1)
dt
dv dv dy
dy
dv
dv
mas
= × , e como v = , teremos
=v
e substituindo em (15.1)
dt dy dt
dt
dt
dy
vem
dv
= −ky , portanto: mv dv = −ky dy .
mv
dy
As variáveis v e y estão agora separadas, e integrando ambos os membros da
equação:
Z
Z
mv dv = − ky dt + C , ou
1 2
1
mv = − ky2 + C ,
2
2
1 2 1 2
mv + ky = C .
2
2
isto é
O primeiro termo do primeiro membro da equação é a energia cinética Ec e o
segundo termo é a energia potencial Ep , donde
Ec + Ep = C ,
isto é, a soma da energia cinética e da energia potencial é constante.
15.3.1
Cálculo da energia mecânica
Temos C = Ecmax = 12 mvmax , mas v = Aω cos(ωt), logo vmax = Aω, donde:
Ecmax =
1
2
m A2 ω2 ,
mas ω = 2πN, e assim a energia mecânica será
E = Ecmax =
1
2
m A2 ω2 = 2π2 N 2 mA2 .
“ADT-MF” — 2005/11/7 — 8:51 — page 530 — #530
530
Capítulo 15. Movimento periódico complexo
Vejamos agora o cálculo da energia mecânica pelo valor máximo da energia potencial Epmax = 12 ky2max , como y = A sen(ωt), então ymax = A; segue-se
que Epmax = 21 kA2 . Mas ω2 = k/m, logo k = mω2 , portanto
E = Epmax =
1
2
m A2 ω2 = 2π2 N 2 mA2 .
Fica evidente que:
E = Ecmax = Epmax =
1
2
m A2 ω2 = 2π2 N 2 mA2 .
Convém fazer o gráfico da energia potencial Ep em função da posição y:
Ep = 12 k y2 . Veja Fig. 15.1. Nas abscissas se colocou a variável y e nas orde-
Figura 15.1: Energia no movimento harmônico simples.
nadas a energia potencial Ep . O gráfico da função Ep = 12 k y2 é uma parábola
com vértice na origem. A energia potencial máxima é E = 12 k A2 e a energia
cinética no ponto y é dada pela diferença Ec = E − Ep , logo Ec = E − 21 kA2 , o
que corresponde ao segmento CB na Fig. 15.1.
Observação Vemos que a energia total da partícula é proporcional ao quadrado da freqüência e ao quadrado da amplitude. Observe-se que se várias
partículas vibram com a mesma freqüência, a energia do conjunto é então proporcional ao quadrado da amplitude: E = (2π2 N 2 m)A2 = κA2 . Veja-se que as
partículas vibram com a mesma freqüência, enquanto que a amplitude do movimento dessas partículas pode variar simultaneamente no tempo, a energia
total do movimento sendo proporcional ao quadrado da amplitude; esse resultado é importante no estudo do Som, em que o meio pode vibrar com um
movimento periódico de mesma freqüência em todos os seus pontos e a energia do movimento, do Som, sendo proporcional ao quadrado da amplitude. No
“ADT-MF” — 2005/11/7 — 8:51 — page 531 — #531
15.3. Energia no movimento harmônico simples
caso do batimento, o som composto de dois de freqüências quase iguais, tem
amplitude que aumento e diminui, o mesmo acontecendo com o som.
531
“ADT-MF” — 2005/11/7 — 8:51 — page 532 — #532
532
“ADT-MF” — 2005/11/7 — 8:51 — page 533 — #533
Capítulo 16
Movimento harmônico
amortecido,
movimento harmônico forçado,
ressonância
16.1
Movimento harmônico amortecido
Podemos verificar facilmente, colocando um corpo de grande superfície a oscilar preso a uma mola, que o movimento se atenua mais ou menos rapidamente,
deixando de oscilar, passado algum tempo. Quanto maior a superfície do corpo
mais rapidamente o corpo chega ao repouso. Diz-se que o corpo executou um
movimento oscilatório amortecido. Todo movimento harmônico é amortecido,
o amortecimento podendo ser muito pequeno e para um determinado intervalo
de tempo ele pode ser desprezado. É fácil também concluir que esse amortecimento é produzido pelo atrito do meio em que o corpo se desloca, no caso
figurado, o atrito é o do ar sobre o corpo. Vejamos como é possível estudar
esse movimento. Para pequenas velocidades a resistência do ar é proporcional
ao módulo da velocidade e de sentido contrário a essa velocidade, dependendo
também, é claro, da forma do corpo. Façamos, pois, a seguinte hipótese:
Hipótese 16.1. Além da força elástica, a força de atrito que atua sobre o corpo
no movimento harmônico simples é causada pelo amortecimento produzido
pelo atrito com o ar e proporcional à velocidade ~v e de sentido contrário a ~v:
F~a = −r~v, em que r é o coeficiente de proporcionalidade e se denomina fator
533
“ADT-MF” — 2005/11/7 — 8:51 — page 534 — #534
534
Capítulo 16. Movimento harmônico amortecido, forçado e ressonância
de amortecimento.
Figura 16.1: Corpo em movimento harmônico amortecido.
Neste caso, veja Fig. 16.1, numa dada posição do corpo, isto é, para um
dado deslocamento ~y desse corpo no instante t, as forças que atuam sobre o
corpo serão:
1. a força restauradora da mola 1 F~m = −k~y ;
2. a força de amortecimento F~a = −k~v .
Como todos os vetores têm a mesma direção, podemos representá-los por meio
de suas projeções num eixo nessa direção, e a resultante das forças que atuam
no corpo no instante t será: R = Fm +Fa = −rv − ky, essa resultante produzirá a
aceleração d2 y/dt2 sobre o corpo e, pela 2a lei de Newton, temos:
m
d2 y
= −rv − ky ,
ou
dt2
d2 y r dy k
+
+ y = 0,
dt2 m dt m
(16.1a)
(16.1b)
tendo-se dividido (16.1a) pela massa da partícula.
Obtivemos uma equação diferencial (linear) de segunda ordem com coeficientes constantes:
d2 y
dy
+b
+ cy = 0,
dt
dt2
(16.2)
em que b = r/m e c = k/m são constantes.
1
u
Isto é, a força elástica.
“ADT-MF” — 2005/11/7 — 8:51 — page 535 — #535
535
16.1. Movimento harmônico amortecido
A integração dessa equação diferencial é fácil de obter. De fato, suponhamos que a função y1 = eλt , em que u é uma constante e t o tempo, seja uma
solução de (16.2); neste caso, como:
y1 = eλt
⇒
dy1
= λeλt
dt
⇒
d2 y1
= λ2 eλt
dt2
substituindo em (16.2) temos:
λ2 eλt + bλeλt + ceλt = 0
e dividindo por eλt , que é sempre diferente de zero, obtemos:
λ2 + bλ + c = 0 .
(16.3)
2o
Essa equação é uma equação do grau, cujas raízes transformam a equação diferencial (16.2) numa identidade e, portanto, nos dará sua solução. A
equação (16.3) se denomina equação característica da equação diferencial
(16.2). Temos as raízes:
p
p
λ1 = − 21 b + 12 b2 − 4c e λ2 = − 12 b − 12 b2 − 4c
ou, em termos de r e k, como b = r/m e c = k/m:
r
r
r 2 k
+
−
λ1 = −
2m
2m
m
(16.4)
r
2
r
r
k
−
−
λ2 = −
2m
2m
m
Em que podemos considerar λ1 = −γ1 e λ2 = −γ2 quando as raízes forem
negativas e for oportuno destacar o valor absoluto.
Desse modo a solução da equação diferencial (16.2) será:
y = Aeλ1 t + Beλ2 t ,
em que A e B são duas constantes arbitrárias, pois a solução geral de uma equação diferencial de segunda ordem pode ser obtida de duas soluções particulares
independentes, somando-se o produto dessas soluções por duas constantes arbitrárias respectivamente. Portanto, teremos a solução geral:
h q 2
i
h q 2
i
r
k
r
k − mr t
−
−
t
+
−
m
m
m
m t .
y(t) = e
Ae
+ Be
(16.5)
Vejamos agora os casos que podem ocorrer, levando em conta o valor do
discriminante da equação do 2o grau em (16.3), representado pelos argumentos
das exponenciais dentro de chaves na função y(t) em (16.5).
“ADT-MF” — 2005/11/7 — 8:51 — page 536 — #536
536
Capítulo 16. Movimento harmônico amortecido, forçado e ressonância
16.1.1
1o caso:
r
2m
2
> mk
Movimento harmônico superamortecido
Nesse caso, as raízes são
r r
r 2 k
λ1 = −γ1 = − +
−
2m
2m
m
e
r
λ2 = −γ2 = − −
2m
r r 2 k
− ,
2m
m
e a solução geral:
y = A e−γ1 t + B e−γ2 t
(16.6)
terá exponenciais com expoentes negativos. 2 Assim a solução geral (16.6)
tende a zero sempre exponencialmente, e o movimento não é mais oscilatório;
se a partícula é desviada da posição de equilíbrio com um deslocamento total
A0 , ela retorna à posição de equilíbrio mais ou menos lentamente, dependendo
do valor de r, veja Fig. 16.2. O movimento se diz superamortecido.
Figura 16.2: Movimento harmônico superamortecido.
De t = 0 até t = t0 atua uma força que desloca o corpo até A0 , sendo anulada posteriormente, quando atuam a força elástica e a força de amortecimento.
16.1.2
2o caso:
r
2m
2
= mk
Movimento harmônico criticamente amortecido
Nesse caso as duas raízes coincidem: λ1 = λ2 , isto é, só há uma raiz para a
equação característica; segue-se que por esse método só obtemos uma solução
particular, devemos, para encontrar a solução geral, obter outra solução particular independente e multiplicando cada uma por uma constante arbitrária
2
Observe-se que neste caso λ1 e λ2 são negativos, portanto γ1 e γ2 são positivos, uma
vez que, nesse caso, (r/2m)2 é sempre maior que k/m.
“ADT-MF” — 2005/11/7 — 8:51 — page 537 — #537
537
16.1. Movimento harmônico amortecido
e somá-las. Entretanto, supondo-se que a função y = eλt seja uma solução da
equação diferencial (16.2), então a função y2 = teλt também é uma solução
particular dessa equação diferencial. De fato:
dy2
= eλt + λeλt
dt
d2 y2
= λeλt + λeλt + λ2 eλt
dt2
= 2λeλt + λ2 eλt .
⇒
Donde, substituindo na equação diferencial (16.2):
2λeλt + λ2 eλt + beλt + bλeλt + cλeλt = 0
ou
i
h
i
h
λ2 + bλ + c teλt + 2λ + b eλt = 0 .
(16.7)
Como, por hipótese, λ é solução da equação característica (16.3), então o primeiro colchete de (16.7) é igual a zero; e como as raízes coincidem, por (16.4),
r
λ = − 2m
, e como fizemos b = r/m, então λ = −b/2, daí o segundo colchete também é igual. Logo, sendo (16.7) satisfeita identicamente, fica demonstrado que
se as raízes da equação característica são iguais, então λ = −b/2, e daí y1 = eλt e
y2 = teλt são duas soluções particulares (independentes) da equação diferencial
(16.2).
A solução geral será, portanto:
y = A eλt + B t eλt = (A + B t) eλt
r
y = (A + B t) e− 2m t ,
(16.8)
em que A e B são duas constantes determinadas pelas condições iniciais y(0)
e v(0). É fácil ver que essa função tende para zero sem oscilar, mais ou menos rapidamente. Veja Fig. 16.3. Nesse caso o movimento se diz criticamente
amortecido.
16.1.3
3o caso:
r
2m
2
< mk
Movimento harmônico subamortecido
2
r
O discriminante ∆ = 2m
− mk da equação característica (16.3) é negativo, as
raízes são complexas 3 conjugadas:
r
r
k r 2
−
±i
−
,
2m
m 2m
3
Note-se que
q
r 2
− mk
2m
=
√2
q
−1
2
k
r
− 2m
m
q
=i
2
k
r
− 2m
m
“ADT-MF” — 2005/11/7 — 8:51 — page 538 — #538
538
Capítulo 16. Movimento harmônico amortecido, forçado e ressonância
Figura 16.3: Movimento harmônico criticamente amortecido.
De t = 0 até t = t0 atua uma força que desloca o corpo até A0 , sendo anulada posteriormente, quando atuam a força elástica e a força de amortecimento.
estando claro que neste caso
−
y(t) = e
r
m
t
−i
C1 e
2
k
r
−
m
2m > 0.
q
2
k
r
m− m t
Assim a solução geral será:
q
+ C2 e
+i
2 k
r
m− m t .
(16.9)
Observe-se que mk = ω20 é a freqüência angular do movimento não-amorter
, podemos escrever compactamente: ω2 = ω20 − α2
cido, assim, fazendo α = 2m
que é uma freqüência. Levando em (16.9), temos:
h
i
y = e−αt C1 e−iωt + C2 e+iωt .
Como eiθ = cos θ+i sen θ, temos:
h
i
= e−αt C1 cos(ωt) − i sen(ωt) + C2 cos(ωt) + i sen(ωt)
h
i
= e−αt C1 + C2 cos(ωt) + C2 − C1 i sen(ωt) .
Sendo C1 e C2 complexos arbitrários, para que se tenha solução real para y
basta que sejam complexos conjugados, com efeito, fazendo C1 = a+ib e C2 =
a−ib, com a e b reais arbitrários, temos:
h
i
y = e−αt 2a cos(ωt) − (2bi)i sen(ωt)
h
i
= e−αt 2a cos(ωt) + 2b sen(ωt) .
√
Multiplicando e dividindo por 4a2 +4b2 , vem:
p
h
i
2a
2b
y = 4a2 +4b2 e−αt √
cos(ωt) + √
sen(ωt)
4a2 +4b2
4a2 +4b2
“ADT-MF” — 2005/11/7 — 8:51 — page 539 — #539
539
16.1. Movimento harmônico amortecido
e como √ 2a2 2 = c1 e √ 2b2 2 = c2 são reais no intervalo [−1, +1] ⊂ R, e tais
4a +4b
4a +4b
que a soma dos quadrados é sempre igual a 1, podemos pôr:
c1 = sen ϕ e c2 = cos ϕ ,
donde,
h
i
y = A0 e−αt sen ϕ cos(ωt) + cos ϕ sen(ωt)
√
em que se pôs A0 = 4a2 +4b2 . Segue-se que se pode pôr:
y = A0 e−αt sen(ωt + ϕ) .
r
Desse modo, o movimento é oscilatório, com amplitude A = A0 e−αt= A0 e−( 2m )t
que decresce exponencialmente; embora o movimento não seja periódico, a
partícula passa em intervalos regulares de tempo pela posição de equilíbrio
com velocidade no mesmo sentido, bem como a velocidade seqanula no mesmo
2
r
intervalo de tempo correspondente à freqüência angular ω = ω20 − 2m
, isto
é, T = 2π/ω. Veja Fig. 16.4.
A solução da equação diferencial do movimento depende de duas constantes arbitrárias A0 e ϕ como era de se esperar por se tratar de equação diferencia
de 2a ordem.
O movimento harmônico se denomina, nesse caso, movimento harmônico
subamortecido.
Figura 16.4: Movimento harmônico subamortecido.
Se não houver amortecimento, i.e., se r = 0, a equação √
será a equação do
MHS (não-amortecido), periódico com a freqüência ω0 = k/m, como já se
viu.
“ADT-MF” — 2005/11/7 — 8:51 — page 540 — #540
540
Capítulo 16. Movimento harmônico amortecido, forçado e ressonância
Quando r não é nulo, a freqüência 4 do movimento amortecido é
q
ω = ω20 − α2 , sendo α = r/(2m) ,
é menor que a do movimento não amortecido correspondente, para mesma
constante elástica k e mesma massa m. Ora, se r é muito pequeno, então podemos considerar ω ≈ ω0 .
As constantes arbitrarias A0 e ϕ são determinadas pelas condições iniciais
(posição e velocidade), como: 5
y = A0 e−αt sen(ωt + ϕ) , portanto
v = −αA0 e
−αt
(16.10a)
−αt
sen(ωt + ϕ) + ωA0 e
cos(ωt + ϕ) ,
(16.10b)
para t = 0,
y = y0 = A0 sen(ϕ) ,
r
A0 sen(ϕ) + ωA0 cos(ϕ)
v = v0 = −
2m
r
=−
y0 + ωA0 cos(ϕ) .
2m
(16.11a)
(16.11b)
(16.11c)
Assim podemos determinar A0 e ϕ em termos da posição inicial y0 e da velocidade inicial v0 , com efeito: de (16.11a) e (16.11b)
!
v0
r
1 v0
r
=−
+ ω cot(ϕ) ⇒ cot(ϕ) =
+
,
y0
2m
ω y0 2m
logo
tan(ϕ) =
ω y0
r
v0 − 2m
y0
e de (16.11c), que levou em conta (16.11a) em (16.11b):
A20 =
y20 + (v0 +
r
2
2m y0 )
ω2
Donde o diagrama da Fig. 16.5.
4
u Note-se que nesse caso o movimento não é periódico, não tendo uma freqüência a
ele associado, esse termo está sendo usado apenas para alguns aspectos do movimento que se
repetem em intervalos de tempo regulares, não estando aplicado ao movimento como um todo,
conforme ocorre com o movimento harmônico simples não amortecido.
5
Veja rodapé 6, pág. 542.
“ADT-MF” — 2005/11/7 — 8:51 — page 541 — #541
541
16.1. Movimento harmônico amortecido
Figura 16.5: Diagrama para as condições iniciais do movimento harmônico subamortecido.
Aplicações
1. O estudante que já fez a balança analítica (§4.8, pág. 220) deve lembrar-se como é trabalhoso determinar o ponto de equilíbrio do fiel da
balança numa pesada. Em balanças modernas esse inconveniente foi sanado transformando-se o movimento oscilatório dos pratos da balança
de fracamente amortecido (balanças analíticas antigas) em movimento
criticamente amortecido. A balança não oscila, os pratos numa pesada
vão ao ponto de equilíbrio sem oscilar.
2. A mesma coisa ocorre no galvanômetro balístico, cujo movimento oscilatório é criticamente amortecido.
Prática Para verificar em dispositivos físicos o amortecimento, faça a comparação entre duas montagens, como indicados na Fig. 16.6 e na Fig. 16.7. Determine o intervalo de tempo de oscilações do corpo (o prato) no dispositivo
Fig. 16.6 até parar, quando o deslocamento máximo era y0 . Em seguida coloque o prato na posição da Fig. 16.7 e determine o intervalo de tempo até parar,
Figura 16.6: Montagem com o prato na
vertical.
Figura 16.7: Montagem com o prato na
horizontal.
“ADT-MF” — 2005/11/7 — 8:51 — page 542 — #542
542
Capítulo 16. Movimento harmônico amortecido, forçado e ressonância
quando o deslocamento máximo é o mesmo y0 da situação anterior. Qual a
conclusão?
16.2
Decremento logarítmico
A solução para o movimento harmônico amortecido é 6
r
y(t) = A0 e− 2m sen(ωt + ϕ) .
Como a amplitude decai exponencialmente, podemos calcular os deslocamentos máximos sucessivos, isto é, quando a função seno atinge o valor 1 (um),
o que ocorre em intervalos de tempo regulares T , tal que ωT = 2π, ou seja,
T = 2π/ω. Neste caso, quando ωt1 +ϕ = (2k+1)π/2,
r
A1 = A0 e− 2m t1 ,
r
r
A2 = A0 e− 2m t2 = A0 e− 2m (t1 +T ) ,
e assim:
r
r
r
A1
A0 e− 2m t1
=
= e− 2m t1 + 2m (t1 +T )
r
A2 A e− 2m (t1 +T )
0
r
= e 2m T
tomando-se o logaritmo neperiano:
ln(
r
A1
)=
T = δ.
A2
2m
6
u Note-se que das expressões da posição e da velocidade do movimento harmônico sub
amortecido em função do tempo em (16.10) é possível determinar a razão v(t)/y(t): (verifique)
v(t)
= −α + ω cot(ωt + ϕ)
y(t)
1 dy d
r
=
ln(y(t)) = −
+ ω cot(ωt + ϕ) ,
y dt
dt
2m
independentemente das condições iniciais do movimento (tratando-se portanto de uma constante de movimento). Assim, embora a posição y e a velocidade v de um movimento harmônico
subamortecido não sejam dados por funções periódicas, i.e., o movimento harmônico subamortecido não é um movimento periódico, a derivada d ln(y)/dt = (1/y) dy/dt (chamada derivada
logarítmica de y(t)) é uma função periódica de período T = 2π/ω, intervalo
de tempo que carac√
terizam, se y , 0, posições em progressão geométrica de razão e−πr/ mk , como era de se esperar
do fator exponencial e y(t).
“ADT-MF” — 2005/11/7 — 8:51 — page 543 — #543
543
16.3. Dissipação de energia
O logaritmo neperiano da razão entre duas amplitudes sucessivas se denomina
decremento logarítmico. O decremento logarítmico do movimento harmônico
subamortecido é:
r
A1
T.
δ = ln( ) =
A2
2m
No gráfico da Fig. 16.4 temos: A1 = 1,7 e A2 = 1,1, deste modo δ = ln(A1 /A2) =
ln(1,7/1,1) = ln(1,54) ≈ 0,43.
16.3
Dissipação de energia
A energia no MHS é dada por E = 2π2 N 2 mA2 , veja pág. 529, em que m é
a massa da partícula que executa o MHS de freqüência N com amplitude A,
como já foi visto; para a mesma partícula de massa m executando um MHS de
freqüência N essa energia é proporcional ao quadrado da amplitude E = κA2 ,
sendo κ = 2πN 2 m. No caso do movimento harmônico amortecido a energia
decresce; ela se dissipa pelo atrito com o meio. No caso do movimento harmônico subamortecido, no instante T 1 ela terá a energia E1 = κA21 e no instante
t2 = t1 + T , quando a amplitude é A2 , a energia será E2 = κA22 . A variação da
energia durante o intervalo de tempo t2 −t1 = T , isto é, durante o ciclo T , será:
∆E = E2 − E1 ,
esse é o acréscimo que, como se vê, é negativo, pois a energia diminui. O
decréscimo da Energia por ciclco será:
−∆E = E1 − E2
e o decréscimo relativo de energia por ciclo será:
κA22
E2
∆E E1 − E2
=
=1−
=1− 2
−
E1
E2
E1
κA1
!2
2
r
A2
=1−
= 1 − e− 2m T
A1
r
= 1 − e− m T
(16.12)
Nota O desenvolvimento de uma função y = f (x) em série de Taylor é:
f (x) = f (0) + f 0 (0)
x
x2
x3
+ f 00 (0)
+ f 000 (0)
+ ...
1!
2!
3!
“ADT-MF” — 2005/11/7 — 8:51 — page 544 — #544
544
Capítulo 16. Movimento harmônico amortecido, forçado e ressonância
Desse modo, a função y = e−x , desenvolvida em série de Taylor será:
e−x = 1 − x +
1 2 1 3 1 4
1
x − x + x + . . . + (−1)n xn + . . .
2!
3!
4!
n!
Sendo x = mr T , vem:
r 1 r 2
r
−
m
e
= 1 + − T + − T + ...
m
2 m
Se r for muito pequeno, podemos desprezar os termos de grau maior ou igual
a, e assim teremos de (16.12):
"
#
r
∆E
1 r 2
=1− 1− T +
−
T + ...
E1
m
2 m
r
= T,
m
tendo-se desprezado dos termos com expoentes maiores ou iguais a 2. Desse
modo, o decréscimo relativo de energia por ciclo, ou perda relativa de energia
por ciclo será:
rT
∆E rT
=
=2
= 2δ .
−
E
m
2m
Podemos então dizer que se o decréscimo logarítmico é muito pequeno, então
a perda relativa de energia por ciclo é igual ao dobro do decremento logarítmico.
Um sistema real sempre perde energia, mas há sistemas que perdem muito
pouco; como o que interessa é saber se um sistema perde pouca ou muita energia, usa-se o inverso so número que dá a perda relativa da energia por ciclo
para caracterizar o sistema. Indica-se esse inverso pela letra Q, e se diz o Q do
sistema, ou o fator de qualidade do sistema
Q=
E
1
=−
.
−∆E/E
∆E
No caso em que δ ≪ 1, Q = 1/(2δ). Esse valor será tanto menor quanto menor
for a perda ou dissipação de energia por ciclo.
Exercício 16.1. Calcule a perda relativa de energia por ciclo e o Q do sistema
do movimento harmônico amortecido da Fig. 16.4.
Temos
−
∆E
A2
=1−
E
A1
!2
=1−
1,1
1,7
!2
= 1 − (0,647)2 ≈ 1 − 0,42 = 0,58 ,
“ADT-MF” — 2005/11/7 — 8:51 — page 545 — #545
545
16.4. Problemas
o Q do sistema será:
Q=−
E
= 1/0,58 = 1,7 ,
∆E
que é um valor muito baixo.
Observação importante Veja-se que o decremento logarítmico δ como calculado anteriormente é 0,43, logo, se calculássemos a perda de energia por ciE
clo como sendo igual a 2 vezes o decremento logarítmico, 2δ, teríamos − ∆E
=
E
0,89, o que está errado, pois − ∆E = 2δ quando δ é muito pequeno, o que não é
o caso.
16.4
Problemas
Problema 16.1. Use o desenvolvimento em série de Taylor e mostre que uma
fórmula mais apropriada para o cálculo de −∆E/E pode ser obtida com a
aproximação até o 4o termo da série:
"
#
∆E
2
1
2 4
−
= 2δ 1 − δ + δ2 − δ3 +
δ .
(16.13)
E
3
3
15
Calcule pela expressão (16.13) o valor do decréscimo relativo de energia por
ciclo para o exemplo anterior, δ = 0,43
Problema 16.2. Uma partícula oscila numa mola em movimento harmônico
subamortecido. Observa-se que após 20 s a amplitude do movimento se reduz
à metade. Calcule o decremento logarítmico, sabendo que nos 20 s houve 18
oscilações. Calcule também o decréscimo relativo de energia por ciclo.
r
r
r
Neste caso A1 = A0 e− 2m t1 , An = A0 e− 2m (t1 +nT ) , donde A1 /An = e− 2m nT ,
r
logo ln(A1 /An ) = 2m
nT . Mas An = (1/2)A1 , daí A1 /An = 2, portanto, ln(A1 /An ) =
r
ln 2 = 0,69 = 2m nT e assim:
δ=
r
2 × 0,69 2 × 0,69
T=
=
= 0,077
2m
n
18
uma vez que isso foi observado em n = 18 ciclos. Para o cálculo do decréscimo
relativo de energia por ciclo:
−
∆E
= 2δ = 0,154 ,
E
“ADT-MF” — 2005/11/7 — 8:51 — page 546 — #546
546
Capítulo 16. Movimento harmônico amortecido, forçado e ressonância
usando a expressão dos três primeiros termos da série de Taylor:
h
i
∆E
−
= 2δ 1 − δ + (2/3) δ2
E
= 0,154 [1 − 0,077 + (2/3) · 0,593]
= 0,154 × 0,96 = 0,148 ,
Discrepância: 4 % aproximadamente.
Problema 16.3. Uma partícula de massa m = 50 g oscila suspensa de uma
mola de coeficiente k = 3 gf/cm. Sabendo que o coeficiente de amortecimento
é r = 90 dyn/(cm/s), pede-se:
1. O tipo do movimento oscilatório.
2. A freqüência do movimento.
3. A perda relativa de energia do movimento.
4. O Q do sistema.
Respostas
1. Equação diferencial do movimento
d2 y r dy k
+ y=0
+
dt2 m dt m
Substituido os dados:
d2 y 90 dy 3 × 980
+
y=0
+
50
dt2 50 dt
d2 y
dy
+ (1,8)
+ (58,8) y = 0
2
dt
dt
Equação característica: λ2 + 1,8 λ + 58,8 = 0.
Raízes complexas (0,9±7,6 i), portanto, movimento harmônico subamortecido.
2. Freqüência do movimento:
r
y = e− 2m t sen(ωt − ϕ)
q
2 p
r
em que ω = mk − 2m
= 58,8 − [(90/2) · 50]2 ≈ 7,6, assim
2πN = 7,6, donde N = 1,21 Hz e T = 1/N = 0,82 s.
90
r
3. −∆E/E = 1−(A /A )2 = 1−e− m T = 1−e− 50 · 0,82 = 1−e−1,476 ≈ 0,77
2
1
4. Q do sistema:
Q = −E/∆E = 1/0,77 ≈ 1,3 .
“ADT-MF” — 2005/11/7 — 8:51 — page 547 — #547
547
16.4. Problemas
Problema 16.4. Uma partícula de massa igual a 100 g vibra suspensa de uma
mola. Para t = t1 sua amplitude é y = A1 = 20 cm e para t2 = t1 +T , A2 = 19,8 cm.
Se a mola tem coeficiente k = 1 gf/cm, pergunta-se
1. A perda de energia por ciclo.
2. O Q do sistema.
3. A expressão da posição em função do tempo, supondo que para t = 0,
y = 20 cm e ϕ = π/2.
Respostas
1. Supondo que T seja o período, termos:
−
∆E
= 1 − (A2 /A1 )2 = 1 − (19,8/20,2)2 = 1 − (0,99)2 = 1 − 0,980
E
= 0,02 .
Portanto, a perda de energia por ciclo é aproximadamente 2 %.
2. O Q do sistema:
Q=−
E
= 1/0,02 = 50 (bastante alto).
∆E
3. Temos
r
y = A e− 2m t sen(ωt + ϕ) , então
y(0) = A e0 sen(π/2) ⇒ A = 20 cm
r
r
y(T ) = 20 e− 2 · 100 T sen(ωT + π/2) = 19,8 ⇒ 20 e− 2 · 100 T = 19,8
donde
−
r
T = ln(19,8/20) = ln(0,99) = 0,01 , logo r/(2m) = 0,01/T
2m
e ainda:
ω2 =
k r 2 1 · 980 10−4
ω2
−
=
− 2 = 9,8 − 10−4 2
m
2m
100
T
4π
donde
(4π2 + 10−4 ) ω2 = 9,8(4π2 ) ⇒ ω2 = 9,8 ⇒ ω = 3,13 rad/s
0,01 · ω 0,01 · 3,13
r
r
E como 2m
= 0,01
, então 2m
= 0,005 s−1 . Temos finalmente:
T = 2π =
2π
y = 20 e−0,005 t sen(3,13 t + π/2) ,
sendo r = 2 × 100 × 0,005 = 1 dyn/(cm/s).
“ADT-MF” — 2005/11/7 — 8:51 — page 548 — #548
548
Capítulo 16. Movimento harmônico amortecido, forçado e ressonância
Problema 16.5. Uma partícula de massa igual a 100 g vibra presa a uma
mola de constante elástica k = 0,5 gf/cm. Observa-se que após 10 oscilações
sua amplitude cai de 20 cm para 18 cm Pergunta-se qual a perda de energia
por ciclo, qual o Q do sistema?
Resposta Temos:
∆E
A2
−
=1−
E
A1
!2
⇒
A2
A1
!2
=1+
∆E
E
Donde, aplicando análoga e sucessivamente para os n ciclos seguintes:
A2 /A1 = (1 + ∆E/E)1/2
A3 /A2 = (1 + ∆E/E)1/2
..
.
Ai /Ai−1 = (1 + ∆E/E)1/2
..
.
An /An−1 = (1 + ∆E/E)1/2 .
Multiplicando essas (n−1) igualdades membro a membro, vem
An /A1 = (1 + ∆E/E)(n−1)/2 ,
donde (An /A1 )2/(n−1) = (1 + ∆E/E), logo
∆E/E = 1 − (An /A1 )2/(n−1) .
No caso do problema: n = 10, A1 = 20 e A10 = 18, logo
= 1 − (18/20)2/9
= 0,023 ,
Ou seja, 2,3 % é a perda de energia por ciclo, correspondendo ao fator de qualidade Q = −E/∆E = 1/0,023 ≈ 43.
Problema 16.6. Uma mola sob a ação de uma força e 20 gf se distende de
22 cm, a mola é linear. 7 Posta a oscilar com a massa de 20 g e amplitude
inicial de 15 cm a partir do repouso, ao fim de 76 oscilações tem amplitude de
7,5 cm. Pede-se:
7
u Isto significa que todas as espiras da mola estão separadas para situação de carga zero;
o verbo distender significa aqui deformar.
“ADT-MF” — 2005/11/7 — 8:51 — page 549 — #549
16.5. Exercícios
1. O coeficiente k da mola.
2. O decréscimo relativo de energia por ciclo.
3. O Q do sistema.
Respostas
1. Coeficiente elástico da mola, como ela é linear e para y = 0 correspondendo
à posição de equilíbrio: k = 890,9 dyn/cm.
2. Perda relativa de energia por ciclo: −∆E/E = 0,02, ou seja, 2 %.
3. Fator de qualidade: Q = 1/0,02 = 50.
16.5
Exercícios
Exercício 16.2. O estudante deve recordar logaritmos e suas propriedades.
Tendo em vista as máquinas de calcular e os programas de computador atualmente existentes, elas podem fazer os cálculos mais complicados sem muito
trabalho e rapidamente; sem calculadoras ou sem computadores seria extremamente penoso fazer a maior parte dos exercícios e problemas dados aqui, mas
o estudante não pode ignorar a matemática, nesse casa a máquina não resolve
nada.
Exercício 16.3. Coloque uma massa de 20 g numa das molas do estojo de mecânica (k pequeno). Coloque, porém, como ligação entre a mola e a massa um
laço pequeno e flexível (veja Fig. 16.8). Observe que ao esticar a mola segurando a massa, ver-se-á a extremidade da mola presa ao laço girar de um ângulo
θ apreciável. Essa observação é importante, pois dará um interessante caso de
ressonância. A mola ao mesmo tempo que se desloca (torção, porquê? observe
apenas uma espira), ela se abre (ela se flexiona e se flete), faça a observação
para concluir; o diâmetro da espira aumenta.
Exercício 16.4. Coloque nas condições anteriores a massa de 20 g para oscilar,
colocando porém uma régua na melhor posição para observar e medir o amortecimento do movimento. Ponha a oscilar com uma amplitude A1 , conveniente,
previamente medida, e simultaneamente conte o intervalo de tempo para que a
amplitude se reduza à metade da inicial: An = (1/2) A1 , n a determinar. Pede-se:
1. A perda de energia por ciclo;
2. O fator de qualidade do sistema;
549
“ADT-MF” — 2005/11/7 — 8:51 — page 550 — #550
550
Capítulo 16. Movimento harmônico amortecido, forçado e ressonância
Figura 16.8: Dispositivo para exercício experimental de movimento harmônico subamortecido.
3. Supondo T ≈ T 0 = 2π mk , determinar r. Qual a dimensão de r?
4. Ache o decremento logarítmico.
5. Compare a perda de energia no primeiro item com 2δ = −∆E/E.
6. Qual a equação do movimento, supondo ϕ = π/2. Porquê π/2?
Exercício 16.5. Calcule o valor do período T do exercício anterior contando
50 oscilações completas e medindo o respectiva intervalo de tempo ∆t: T =
(∆t/50). Compare esse valor determinado experimentalmente com T 0 = √2π
,
k/m
2π
.
(k/m)−[r/(2m)]2
sendo T = √
Exercício 16.6. Associe duas molas em série e repita o exercício 16.2, determinando T como no exercício 16.3.
16.6
Movimento harmônico forçado
Diz-se que há um movimento harmônico forçado quando sobre o sistema oscilatório se aplica uma força F~ externa, complementares à força elástica e à
força de atrito viscoso. Essa força externa pode contribuir para a manutenção
do movimento harmônico. Vamos supor, para facilitar o estudo do movimento,
que a força F~ seja uma função senoidal do tempo F~ = F~0 sen(ωt), em que ω é
uma freqüência angular constante.
“ADT-MF” — 2005/11/7 — 8:51 — page 551 — #551
551
16.6. Movimento harmônico forçado
Figura 16.9: Forças no oscilador harmônico forçado.
É fácil obter a equação de movimento, veja Fig. 16.9.
~ = F~ + F~1 + F~2 = m~a ,
R
em que F~1 é a força restauradora da mola e F~2 é a força de atrito do meio.
Como a direção dos vetores é a mesma, podemos levar em conta suas projeções
no eixo Oy (Fig. 16.9)
F − ky − rv = m
m
d2 y
dt2
ou
d2 y
dy
+k
+ r y = F0 sen(ωt) ,
2
dt
dt
(16.14)
donde a equação diferencial do movimento:
d2 y k dy r
F0
+
+ y=
sen(ωt) .
m
dt2 m dt m
(16.15)
A integração dessa equação diferencial se faz tomando-se a homogênea associada, isto é, a equação diferencial igualando-se o 2o membro a zero:
d2 y k dy r
+ y = 0,
+
dt2 m dt m
(16.16)
cuja solução obviamente será a já estudada anteriormente. À solução geral
da homogênea associada (16.16) soma-se uma solução particular de (16.15),
“ADT-MF” — 2005/11/7 — 8:51 — page 552 — #552
552
Capítulo 16. Movimento harmônico amortecido, forçado e ressonância
obtendo-se então a solução geral de (16.15). Tudo se resume portanto em encontrar uma solução particular de (16.15). Suponhamos que essa solução seja
do tipo:
yp = A sen(ωt − ϕ) ,
em que A e ϕ sejam duas constantes a determinar, de modo a satisfazer as
condições do problema, e ω sendo a freqüência de F. Temos:
dyp
d2 yp
= ωA cos(ωt − ϕ)
e
= −ω2 A sen(ωt − ϕ) .
dt
dt2
Levando a função yp e suas derivadas na equação homogênea (16.16), teremos:
r
k
F0
ωA cos(ωt − ϕ) + A sen(ωt − ϕ) =
sen(ωt) .
m
m
m
Desenvolvendo as funções seno e cosseno, termos:
−ω2 A sen(ωt) cos(ϕ) − cos(ωt) sen(ϕ) +
rω A cos(ωt) cos(ϕ) + sen(ωt) sen(ϕ) +
+
m
F0
k + A sen(ωt) cos(ϕ) − cos(ωt) sen(ϕ) =
sen(ωt) .
m
m
Reunindo os coeficientes de sen(ωt) e cos(ωt), e dividindo por A, obtemos:
"
#
rω
k
2
−ω cos ϕ +
sen ϕ + cos ϕ sen(ωt) +
m
m
"
#
rω
k
F0
2
ω sen ϕ +
cos ϕ − sen ϕ cos(ωt) =
sen(ωt)
m
m
Am
−ω2 A sen(ωt − ϕ) +
ou
"
!
k
2
− ω cos ϕ +
m
!
"
k
2
− ω sen ϕ +
−
m
#
rω
sen ϕ sen(ωt) +
m
#
rω
F0
cos ϕ cos(ωt) =
sen(ωt)
m
Am
Como por hipótese a função yp é uma solução da equação diferencial (16.15),
a igualdade anterior é uma identidade, logo devemos ter:
!
k
rω
F0
2
− ω cos ϕ +
sen ϕ =
(16.17a)
m
m
Am
!
rω
k
− ω2 sen ϕ +
cos ϕ = 0
−
(16.17b)
m
m
“ADT-MF” — 2005/11/7 — 8:51 — page 553 — #553
553
16.6. Movimento harmônico forçado
De (16.17b) tiramos:
tan ϕ =
rω/m
r
=
.
2
(k/ω) − mω
(k/m) − ω
Ainda se tira de (16.17b) as expressões relacionado sen ϕ e cos ϕ:
sen ϕ =
r
cos ϕ
(k/ω) − mω
e
cos ϕ =
(k/ω) − mω
sen ϕ ,
r
que levadas em (16.17a) nos dão:
)
r2 + [(k/m) − ωm]2
=
cos ϕ
(m/ω) [(k/ω) − mω]
e
!2
ω k
− mω + rω
=
sen ϕ
r ω
(
F0
Am
⇒ A cos ϕ =
F0
A
⇒ A sen ϕ =
ω
ω
F0
k
ω
− mω
2
− mω + r2
k
ω
F0 r
k
ω
2
− mω +
r2
elevando ao quadrado, somando ambos os membros das equações anteriores e
tomando a raiz quadrada se obtém finalmente:
A= p
F0 /ω
r2 + (k/ω − mω)2
.
(16.18)
A amplitude A e a fase inicial ϕ da solução particular yp podem ser representados num diagrama como o da Fig. 16.10. Desse modo, a solução particular
procurada para a equação diferencial (16.15) do movimento é:
yp = A sen(ωt − ϕ) =
F0
sen(ωt − ϕ)
Z
em que
r
ϕ = arctan
k/ω − mω
!
e
Z=
q
r2 + (k/ω − mω)2
A grandeza Z se denomina impedância do sistema mecânico, e (k/ω−mω) = X
é a reatância do sistema mecânico, por analogia com as oscilações elétricas
num circuito RLC.
A solução geral da equação (16.15) será portanto: [veja (16.6)]
y = C1 e−γ1 t + C2 e−γ2 t + A sen(ωt − ϕ) .
“ADT-MF” — 2005/11/7 — 8:51 — page 554 — #554
554
Capítulo 16. Movimento harmônico amortecido, forçado e ressonância
Figura 16.10: Diagrama
p para a solução particular do oscilador harmônico forçado
por F = F0 sen(ωt); Z = r2 +(k/ω−mω)2 a impedância e X = (k/ω−mω) a reatância
do sistema de massa m, constante elástica k e coeficiente de amortecimento r.
As duas primeiras parcelas constituem a solução geral da homogênea associada
e o terceiro termo é a solução particular da equação (16.16). Observe-se que
essa solução particular fornece um termo oscilante senoidalmente no tempo,
enquanto que os outros dois termos 8 decrescem exponencialmente no tempo 9 ,
portanto prevalece deste modo a solução senoidal. Podemos assim considerar
apenas essa solução.
Observação Num circuito RLC contendo uma força eletromotriz oscilante
E = E0 sen(ωt + φ), veja Fig. 16.11, teremos a seguinte equação diferencial:
L
di
1
+ R i + q = E0 sen(ωt + φ)
dt
C
dq
e fazendo i = dt
, vem:
L
d2 q
dq 1
+R
+ q = E0 sen(ωt + φ) .
2
dt C
dt
(16.19)
A carga elétrica oscilará entre valores máximos positivos e mínimos negativos
no circuito elétrico, tal e qual o deslocamento no circuito mecânico. A equação
(16.19) difere da equação (16.14) apenas pela natureza dos coeficientes da
8
u Que constituem a solução de um movimento harmônico, superamortecido, critica
mente amortecido ou subamortecido, já estudados.
r
9
u A contribuição da solução da homogênea decai exponencialmente pelo fator e− 2m t , ve
ja (16.4); note-se que após um intervalo de tempo igual a 0,015×(2m)/r a amplitude decresce
98,5 %.
“ADT-MF” — 2005/11/7 — 8:51 — page 555 — #555
555
16.6. Movimento harmônico forçado
Figura 16.11: Circuito elétrico composto pela fonte eletromotriz E = E0 sen(ωt+φ),
pela resistência R, pela indutância L e pela capacitância C.
equação, os quais se referem a outras grandezas
dy
d2 y
+k
+ r y = F0 sen(ωt + φ)
2
dt
dt
d2 q
dq 1
L 2 +R
+ q = E0 sen(ωt + φ)
dt C
dt
m
Desse modo podemos estabelecer uma analogia física entre os dois fenômenos pondo a equivalência ∼ :
m∼L,
k∼R,
r∼
1
,
C
F∼E.
Assim podemos concluir que a resistência ôhmica equivale à resistência r
do meio, o inverso da capacitância equivale à constante elástica k da mola, e a
indutância L equivale à massa m. A impedância elétrica
Z=
p
R2 +(Lω−1/Cω)2 ,
em que:
. Lω é a reatância indutiva,
. 1/Cω a textreatância capacitiva, e
. (Lω−1/Cω a reatância.
“ADT-MF” — 2005/11/7 — 8:51 — page 556 — #556
556
Capítulo 16. Movimento harmônico amortecido, forçado e ressonância
16.7
Ressonância
Já vimos que em (16.18) que A = √
F0 /ω
r2 +(k/ω−mω)2
é a amplitude da solução par-
ticular 10 do oscilador (massa m, constante elástica k e coeficiente de atrito
viscoso r) forçado pela força F = F0 sen(ωt), em que ω é a freqüência angular
da força excitadora; essa freqüência pode ser tal que
k
k
− m ω = 0 , isto é, ω2 = .
ω
m
Mas k/m = ω1 é a “freqüência natural” do sistema. Vê-se que neste caso a
amplitude A é máxima; se o fator de amortecimento tende a zero, A tende
para infinito, isso significa que a força oscilante trabalha contra o sistema comunicando-lhe energia que vai se acumulando; em cada ciclo a amplitude vai
aumentando indefinidamente, desde que a força continue a fornecer energia ao
sistema e este possa absorvê-la sem destruir-se.
Antes de prosseguirmos com esse tema convém ilustrá-lo com exemplos
práticos.
16.7.1
Experimento com pêndulos acoplados idênticos
1o ) Tomemos dois pêndulos de comprimento L, e mesma massa m. Veja Fig. 16.12. Ligam-se os dois por um fio CD próximo à suspensão.
Figura 16.12: Dois pêndulos idênticos acoplados pelo fio CD.
Como
p os pêndulos simples têm o mesmo comprimento L, suas freqüências
1
N = 2π
g/L serão iguais, de modo que, se colocarmos o pêndulo B a oscilar,
10
u
Forma em que o sistema se apresenta em regime permanente.
“ADT-MF” — 2005/11/7 — 8:51 — page 557 — #557
557
16.7. Ressonância
ele vai atuar sobre A por meio do fio CD, e A começa a oscilar, absorvendo
energia de B, até que esta se esgote, passando para o pêndulo A. Começa então
o processo inverso, o pêndulo A atua sobre B que começa novamente a oscilar,
a amplitude da oscilação aumentando sempre a medida que a energia de A vai
passando para B, até que A se imobiliza e B tenha absorvido toda a energia de
A, sua amplitude sendo então máxima; em seguida recomeça B a trabalhar sobre A, etc. Desse modo, a energia dos pêndulos fica oscilando entre um e outro,
até dissipar-se, mais ou menos rapidamente, tendo em vista que o movimento
é amortecido (r , 0).
2o ) Para verificar essa transferência de energia e ao mesmo tempo obtermos
um efeito interessante convém fazermos a experiência com pêndulos de massas diferentes. De fato, suponhamos que a massa de B seja muito grande em
relação à de A, veremos então que a amplitude se torna maior que a amplitude
de B. De fato, seja mB e massa de B e mA a de A, e AB a amplitude de B, e AA
a amplitude final de A quando toda energia de B se tenha transferido para A.
Desse modo se tem: 11 energia de B, E B = 2π2 mB N 2 A2B , no início da experiência quando a energia de A é nula. Essa energia se transfere para A, totalmente, isto é, a energia de B se anula e a de A fica máxima E A = 2π2 mA N 2 A2A ,
isto é, essa é a energia de B transferida para A e, portanto, igual a energia inicial
de B:
E B = E A ⇒ 2π2 mB N 2 A2B = 2π2 mA N 2 A2A ,
portanto:
mB A2B = mA A2A .
As freqüências são iguais. Por quê?. . . Porque as freqüências do pêndulo simples não dependem da massa do pêndulo (pág. 454), dependem somente do
comprimento do pêndulo e da aceleração local da gravidade. Deste modo se
tem:
s
mB
AA =
A .
mA B
Sendo assim, se mB = 100 g e mA = 1 g, então mA = 10 mB . Isto é, posto o pêndulo B a oscilar com amplitude de 1 cm a amplitude final do pêndulo A será
10 vezes maior. Para aumentar o caráter sensacional do efeito, fazem-se os
dois corpos A e B com a mesma forma, aparentemente iguais, mas de massas
mB = 100 mA . Por exemplo, dois tubos exatamente iguais externamente, mas
um cheio de chumbo e o outro cheio de ouro, de modo que as massas estejam
11
Veja §15.3.1
“ADT-MF” — 2005/11/7 — 8:51 — page 558 — #558
558
Capítulo 16. Movimento harmônico amortecido, forçado e ressonância
naquela proporção; sese põe o mais pesado a oscilar com amplitude de 1 cm,
o mais leve absorvendo a emergia acabará oscilando com amplitude 10 vezes
maior.
16.7.2
Experimento com pêndulos acoplados de mesmo
comprimento e massas diferentes
Para realização prática do que foi visto acima, pode-se tomar para pêndulo de
maior massa, mB , a base redonda à qual se fixou uma pinça, como está indicado na Fig. 16.13, a fim de facilitar o seu uso, o conjunto tendo a massa
aproximada de 215 g. Fixando o pêndulo B na estrutura, prende-se uma extre-
Figura 16.13: Montagem dos pêndulos acoplados de massas diferentes.
midade C de um fio próximo ao suporte, a outra extremidade desse fio será
presa a um pegador preso à parte superior da estrutura e de tal modo que o
fio fique mais ou menos na horizontal. Prende-se agora ao fio CD, horizontal,
um outro vertical que tem na extremidade inferior uma massa de 5 g a fim de
constituir um pêndulo simples A cujo comprimento L é igual ao comprimento
do pêndulo B, de modo que eles terão o mesmo período. Posto o pêndulo B
a oscilar com amplitude de 2 cm, ver-se-á sua energia passar para o pêndulo
A que alcançará uma amplitude: (215/5) AB = 6,5×2 cm = 13 cm, sendo essa
a amplitude máxima do pêndulo A. Observe que o comprimento L de cada
pêndulo vai da suspensão ao centro de gravidade do pêndulo correspondente.
Pergunta – E se a energia do pêndulo B que está a forçar o pêndulo A a
oscilar fosse inesgotável?
Como já vimos, a energia ir-se-ia acumulando no pêndulo A, sua amplitude
iria aumentando sempre, se não a perdesse para o meio no qual oscilasse, isto
“ADT-MF” — 2005/11/7 — 8:51 — page 559 — #559
16.8. Batimentos
é, se o fator de amortecimento fosse diferente de zero, r , 0. Tratando-se de
um sistema físico, a energia poderia atingir um ponto tal que o sistema não poderia resistir, deteriorando-se, explodindo ou destruindo-se. Podemos fazer um
gráfico para mostrar o efeito produzido na amplitude do sistema A, supondose diferentes fatores de amortecimento r. Veja Fig. 16.14 Nas abcissas se põe
Figura 16.14: Amplitude da massa mA em função da razão das freqüências e para
vários fatores de amortecimento.
a relação ω1 /ω2 = N1 /N2 , em que N1 é a freqüência natural do sistema que
recebe energia e N2 a freqüência do sistema que fornece energia; quando as
duas freqüências são iguais a amplitude do sistema é máxima quando r ≈ 0, se
r é grande, o máximo se dá para valores N1 < N2 , em que N1 é a freqüência
natural do sistema que recebe energia.
16.8
Batimentos
Se a freqüência natural ω1 do sistema A submetido à força F de freqüência
ω é quase igual a ω, então aparecerá o fenômeno de batimento que consiste
no seguinte: a amplitude do sistema forçado A irá aumentando até atingir um
máximo, depois vai decrescendo até se anular, em seguida crescerá novamente
até atingir o valor máximo novamente, retornando a zero depois, e assim essa
variação da amplitude se repetirá, podendo o máximo ir decrescendo à medida
que a energia vai se esgotando.
16.8.1
Experimentos
1o . Faça a montagem como a da Fig. 16.15. Nessa figura ao fio CD estão
559
“ADT-MF” — 2005/11/7 — 8:51 — page 560 — #560
560
Capítulo 16. Movimento harmônico amortecido, forçado e ressonância
Figura 16.15: Dispositivo de osciladores acoplados, A2 e A3 apresentando batimento.
presos 4 pêndulos de comprimentos L1 , L2 , L3 e L4 . O primeiro é muito menor
que L, comprimento do pêndulo B de massa igual a 215 g. L2 é pouco maior
que L, L3 é pouco menor que L, enquanto que L4 é igual L. As massas desses
pêndulos poderão ser respectivamente 5 g, 10 g, 10 g e 20 g. Põe-se o pêndulo
B para oscilar ortogonalmente ao plano dos fios. Ver-se-á então o seguinte: o
primeiro quase não oscilará, o segundo e o terceiro executarão batimentos e
o quarto, em que se verifica a condição ω1 = ω, absorverá a maior parte da
energia de B transmitida ao longo da linha. Em virtude dos vários movimento,
um dos pêndulos em batimento poderá executar um movimento composto de
dois movimentos ortogonais, a energia oscilando entre um e outro.
2o . Associam-se em série duas molas de coeficientes k1 = 1,43 gf/cm e k2 =
1,92 gf/cm. O conjunto foi preso a um fio por sua vez preso à extremidade
do Laboratório Portátil (estojo de mecânica), veja Fig. 16.16. Em seguida, na
mesma estrutura, o pêndulo B de comprimento L estava ligado (acoplado) ao
fio de sustentação das molas, fazendo com ele um ângulo θ. Sabendo-se que a
massa m = 20 g estava presa à extremidade livre do conjunto de molas, pede-se
o comprimento L do fio que fará a massa m oscilar com movimento harmônico
simples longitudinal. Explique.
Resposta
1
1
1
k1 + k2 3,35
a.
=
+
=
=
⇒ k = 0,77 gf/cm
k k1 k2 qk1 k2
2,74 q
0,77×980
1
= 0,97 Hz;
ω1 = 2π N1 = mk ⇒ N1 = 2π
20
“ADT-MF” — 2005/11/7 — 8:51 — page 561 — #561
16.8. Batimentos
Figura 16.16: Acoplamento de um oscilador horizontal e outro vertical.
20×980
4π2 N12 = mk ⇒ L = mg
k = 0,77×980 = 25,7 cm.
b. a massa m vai oscilar quando há ressonância entre os dois sistemas acoplados, isto é, quando as duas freqüências, do pêndulo e da massa m forem iguais,
logo L = 4π2gN 2 = 25,7 cm.
1
3o . Faça uma montagem semelhante a da Fig. 16.16. Observe o ângulo θ de
acoplamento entre os dois fios: a força F~ que puxa o fio que prende as molas
tem componentes F cos θ ao longo da vertical e F sen θ ao longo da horizontal.
É a componente vertical que vai fazer a massa oscilar.
Pergunta: se a força F~ fosse horizontal, isto é, θ = π/2, poderia haver ainda
movimento vertical? Veja o que se segue.
4o . Colocou-se uma mola de coeficiente k = 1,92 gf/cm sustentando uma
massa de 20 g. Um fio prendia a outra extremidade da mola passando por um
suporte, veja Fig. 16.17, ficando a mola na vertical. Pôs-se a mola para oscilar na vertical, o movimento era puramente harmônico na vertical. Foi-se
aumentando o comprimento do fio, até L, quando então a massa m começou
um movimento harmônico oscilatório na horizontal, até que todo o movimento
harmônico na vertical cessasse e o movimento fosse apenas pendular. Qual o
comprimento L do pêndulo simples?
561
“ADT-MF” — 2005/11/7 — 8:51 — page 562 — #562
562
Capítulo 16. Movimento harmônico amortecido, forçado e ressonância
Figura 16.17: Composição de oscilação vertical e horizontal, L é o comprimento
fio-mola em configuração de equilíbrio.
Resposta O comprimento L do pêndulo simples na montagem da Fig. 16.17 é
o dobro do comprimento
do pêndulo simples que vibra com a mesma freqüên√
cia da mola ω1 = k/m, pois haverá correspondência entre as posições extremas de distância 2A do pêndulo simples e as posições extremas inferiores do
movimento harmônico da mola, essas posições estão em uníssono nos dois movimentos, mas as do pêndulo simples correspondem à metade do movimento
completo, enquanto que a do movimento da mola corresponde ao movimento
completo.
5o . O coeficiente da mola na Fig. 16.17 é 1,92 gf/cm e sustenta a massa de
20 g. Qual o comprimento L do pêndulo simples que provoca a ressonância
entre os dois movimentos? A freqüência da mola, como vimos anteriormente,
o dobro da freqüência do pêndulo simples, temos:
. Pêndulo simples: freqüência N1 , comprimento L = g/(4π2 N12 ).
. Mola: freqüência N, coeficiente k = 4π2 N 2 m.
Sendo, na ressonância, as duas freqüências, uma o dobro da outra: N = 2N1 ,
vem N 2 = 4N12 , portanto
L=
g
4π2 (N 2 /4)
=
4gm
k
, pois 4π2 N 2 = .
k
m
“ADT-MF” — 2005/11/7 — 8:51 — page 563 — #563
16.9. O cilindro dançante
Feitos os cálculos para k = 1,92 gf/cm e m = 20 g encontra-se: L ≈ 42 cm.
Feita a montagem com esse comprimento de L obtém-se a ressonância, isto
é, o movimento harmônico da mola se transforma inteiramente no movimento
pendular simples. Observe que tanto faz a mola estar na extremidade inferior
do fio como na extremidade superior com a massa na extremidade inferior do
fio.
Pergunta: por que no caso ilustrado na Fig. 16.16 não há ressonância como
no caso ilustrado na Fig. 16.17, conforme indicado anteriormente? Observe-se
que a componente F sen θ tende a provocar o movimento pendular.
Resposta Porque L1 , o comprimento do pêndulo simples da Fig. 16.16, não
permite a ressonância:
1. No caso da Fig. 16.16, a ressonância é obtida quando L1 = 4L, visto que a
freqüência do movimento provocado pela mola tem a mesma freqüência
que o movimento do pêndulo L.
2. Quanto ao movimento que a componente F sen θ tenderia a provocar, teria a mesma freqüência que a do pêndulo de comprimento L e, portanto,
L1 teria que ser igual a L, o que não é o caso, também.
6o . Faça a montagem da Fig. 16.16 e ponha L1 = 4L para obter a ressonância,
como no primeiro caso da resposta anterior.
16.9
O cilindro dançante
Uma interessante aplicação de tudo o que vimos sobre ressonância com molas
e pêndulos pode ser consubstanciado no que denominamos cilindro dançante
ou “cilindro dançarino”. O dispositivo consiste numa mola fixada num suporte por uma extremidade, tendo fixada na outra um cilindro de massa m e
cujo raio R é adequado (calculado) para a obtenção da ressonância. Ao pormos
o cilindro a executar o MHS longitudinal (na vertical), ele sobe e desce distendendo a mola, mas simultaneamente a mola se abre ao distender-se, isto é, a
espira à qual está fixado o cilindro gira em torno do eixo da mola, veja pág. 549,
exercício 16.3, o que provoca um movimento de rotação do cilindro. A ressonância se efetua exatamente entre o movimento de distensão da mola e o de
rotação. Pouco a pouco a energia do movimento de distensão se transfere para
o de rotação, até que o cilindro apenas gira rapidamente, parando o movimento
longitudinal, depois inverte-se o processo e a energia de rotação se transfere
563
“ADT-MF” — 2005/11/7 — 8:51 — page 564 — #564
564
Capítulo 16. Movimento harmônico amortecido, forçado e ressonância
para o movimento de translação. Podemos ainda, se a mola tem comprimento
suficiente, provocar o aparecimento de um movimento transversal (pendular).
A energia se transferindo para cada um dos movimentos, ocorrendo ainda a
combinação do movimento longitudinal com o transversal, o cilindro descreve
elipses que se transformam em segmentos de reta vertical, horizontal, ele pára,
girando rapidamente, e reinicia sua dança, como uma abelha.
No Laboratório Portátil se encontra o cilindro e a mola respectiva.
“ADT-MF” — 2005/11/7 — 8:51 — page 565 — #565
Capítulo 17
Movimento ondulatório
Para ilustrar o movimento ondulatório, pose-se tomar uma corda grossa, colocando-a esticada sobre uma superfície horizontal. Tomando-se uma de suas
extremidades, faz-se um movimento brusco vertical, subindo e descendo rapidamente com essa extremidade. Origina-se uma elevação, uma onda que se
transmite ao longo da corda com uma certa velocidade. A partícula 1, na extremidade da corda exercita um movimento ortogonal à direção da corda, e
estando ligada às outras partículas ela arrasta-as nesse movimento, o qual se
comunica às adjacentes e assim o movimento se transmite a todas as partes da
corda, propagando-se por ela. Veja Fig. 17.1. Se esse movimento da extremi-
Figura 17.1: Excitação da corda e sua propagação.
dade da corda se repete sempre, origina-se nessa extremidade um movimento
ondulatório propagando-se pela corda.
Para estudar o movimento ondulatório, podemos fazer hipóteses simplificativas para facilitar a obtenção da equação do movimento:
1. O movimento se transmite ao longo da corda com velocidade v constante.
2. O movimento transversal não se atenua, isto é, a forma da onda não se
565
“ADT-MF” — 2005/11/7 — 8:51 — page 566 — #566
566
Capítulo 17. Movimento ondulatório
altera ao se propagar pela corda. Isso equivale a dizer que a energia, ao
se transmitir ao longo da corda não se perdem ou se atenua, ou ainda não
se dissipa, a forma da onda permanece a mesma.
Tomemos um sistema de eixos Oxa, o eixo Ox coincidente com a direção
de propagação do movimento, o eixo Oa ortogonal a Ox, coincidente pois com
a direção transversal ao longo da qual se dá o movimento das partículas da
corda. Consideremos um instante t em que a forma da onda se acha formada,
seu ponto final coincidindo no instante t = 0 com a origem do sistema de
coordenadas Oxa, neste caso podemos representar a forma da onda no sistema
Oxa por uma função:
a = f (t) .
Após um intervalo de tempo t a onda ter-se-á deslocado ao longo de Ox, com
velocidade v constante, de modo que sua extremidade final O estará no ponto
x0 = vt. Ora, como por hipótese, não houve nenhuma variação na forma da
onda, se tomarmos um outro sistema de coordenadas O0 Xa, em que O0 é a
nova origem do sistema novo, obtido do primeiro por simples deslocamento
da origem O para o ponto O0 , é claro que neste sistema as coordenadas dos
pontos da onda serão exatamente as mesmas que nos instantes t = 0, portanto
a = f (X), em que f é a mesma função que representava a onda no instante
t = 0. Mas pela mudança de coordenadas efetuada, X = x − vt. Veja Fig. 17.2.
Figura 17.2: Onda a = f (x − vt) a se propagar com velocidade v.
Segue-se que a = f (x − vt). Essa equação descreve a onda em qualquer instante
t, e em qualquer ponto de abcissa x no sistema de coordenadas inicial.
17.1
Comprimento de onda
O comprimento de onda λ é toda a distância OA (ou O0 A0 ) afetada pela onda.
“ADT-MF” — 2005/11/7 — 8:51 — page 567 — #567
17.2. Equação diferencial da onda
Se a velocidade da onda é v, o intervalo de tempo T que a onda leva para
percorrer a distância igual ao comprimento de onda λ é tal que vT = λ, isto é,
T = λ/v. Esse intervalo de tempo T se denomina período de onda. Um observador postado ao longo de x vê a onda chegar e passar por ele num período T .
17.2
Equação diferencial da onda
Essa equação também é denominada simplesmente equação da onda. Vejamos
como obtê-la. Temos a função que nos dá a forma da onda no sistema Oxa em
qualquer instante t: a = f (x − vt). A função f é agora uma função de duas
variáveis independentes.
Quando consideramos uma variável como constante e a derivamos em relação à outra variável, essa derivada se denomina derivada parcial. Por exemplo,
consideremos t constante e derivamos em relação a x, obtemos a derivada parcial da função em relação a x, com t constante. Analogamente,se fizermos x
constante e derivarmos em relação a t, teremos a derivada parcial em relação
a t com x constante. O símbolo para designar a derivada parcial em relação a
x e a t da função a = f (x, t) é ∂a/∂x e ∂a/∂t, em que ∂ se denomina d-ronde,
∂2 a
, e assim por diante
as derivadas segundas são ∂2 a/∂t2 e ∂2 a/∂x2 , além de ∂t∂x
para as derivadas terceiras, etc.
Qual o significado físico da derivada parcial neste caso? Vejamos, por
exemplo:
∂a .
∂t x=constante
A derivada ∂a/∂t, significa x = constante, o que quer dizer que observamos o
movimento, por exemplo, de um ponto B, veja Fig. 17.2, enquanto a onda passa
por B, o que equivale a dizer que vemos o movimento do ponto B no transcorrer
do tempo t. No início, o ponto B está em repouso no meio, quando a onda o
atinge ele acelera para cima, deslocando-se na vertical, atinge o máximo no
“pico” da onda e depois desce até atingir o nível de repouso ao ter passado a
onda. A variação da posição (velocidade), na vertical, desse ponto x, fixado na
corda (meio) é dada pela derivada parcial primeira:
∂a ∂t x=constante
em relação ao tempo e sua aceleração pela derivada parcial segunda também
em relação ao tempo:
∂2 a ∂t2 x=constante
567
“ADT-MF” — 2005/11/7 — 8:51 — page 568 — #568
568
Capítulo 17. Movimento ondulatório
Já a derivada parcial em relação a x, t = constante fornece-nos a tangente
à forma da onda calculada num dado instante t. É como se tirássemos uma fotografia da onda num dado instante (um instantâneo) e analisássemos a função
que fornecesse a forma da onda naquele instante: a = f (x − vtconst. ), função
apenas de x (para esse instante).
Figura 17.3: Situação em dado instante, destacando a derivada tal que tan α = ∂a/∂x.
Já a derivada parcial segunda em relação a x nos dá a variação da tangente
à curva por unidade de comprimento ao longo da corda calculada no ponto.
Vejamos como relacionar esses conceitos expressos pelas derivadas parciais. Ponhamos u = x−vt, de modo que temos: a = f (u) e u = x−vt. Temos:
∂a ∂ f ∂u
=
×
,
∂x ∂u ∂x
tendo em vista f é uma função de função. Como u = x−vt, vê-se que
df
logo ∂a
∂t = du .
Façamos agora a derivada segunda parcial:
∂u
∂x
= 1,
∂2 a ∂u d d f
=
×
,
∂x2 ∂u du du
pois, para derivarmos parcialmente uma função f 0 = dduf , temos que derivar f 0
em relação a u e em seguida multiplicar pela derivada parcial de u em relação
à variável independente x. Logo:
∂2 a d2 f
=
× 1,
∂x2 du2
(17.1)
pois ∂u
∂x = 1, como já vimos. Vejamos agora a derivada parcial em relação a t,
temos:
∂a d f ∂u
∂u
∂a
df
=
, mas
= −v , portanto
= −v
,
∂t
du ∂t
∂t
∂t
du
“ADT-MF” — 2005/11/7 — 8:51 — page 569 — #569
569
17.3. Trem de onda
façamos a derivada segunda:
"
#
∂2 a ∂a d
df
=
×
−v
, como v é constante,
∂t
du
du
∂t2
"
#
d2 f
∂a
∂a
−v 2 , mas
= −v , portanto,
=
∂t
∂t
du
d2 f
= v2 2 ,
du
Mas, por (17.1):
∂2 a d2 f
=
. Assim obtemos:
∂x2 du2
2
∂2 a
2 ∂ a
=
v
.
∂t2
∂x2
(17.2)
Essa equação diferencial de derivadas parciais se denomina equação diferencial da onda ou simplesmente equação da onda.
Ela diz que a aceleração de um ponto x1 é proporcional à variação da direção da tangente à curva da onda (forma) calculada no ponto x1 ; o coeficiente de
proporcionalidade v2 sendo a velocidade com que a onda se propaga no meio.
Toda função φ = f1 (x, t) que satisfaz a equação da onda:
2
∂2 φ
2 ∂ φ
=
v
∂t2
∂x2
representa uma onda propagando-se num meio linear com velocidade v.
17.3
Trem de onda
Suponhamos que o ponto O onde se originou a onda descrita continue provocando a mesma “perturbação”, isto é, continue no movimento transversal,
originando ondas sucessivas, que, para facilitar o argumento, sejam idênticas
à já descrita e produzidas sem interrupção. Nesse caso, ondas idênticas à já
descria vão seguir-se uma atrás da outra, veja Fig. 17.4. Forma-se o que se
denomina um trem de ondas. Na Fig. 17.4 o trem de ondas possui 4 ondas.
17.4
Freqüência
Suponhamos que estamos a observar o ponto C. O número de ondas que passa
por C por unidade de tempo se denomina freqüência. Esse é um dado muito
“ADT-MF” — 2005/11/7 — 8:51 — page 570 — #570
570
Capítulo 17. Movimento ondulatório
Figura 17.4: Trem de ondas.
importante do movimento ondulatório. Ora, já vimos (§17.1) que o período
T da onda é o intervalo de tempo para que uma onda passe por um ponto C.
É claro que não havendo interrupção no trem de ondas e se o trem de ondas
leva um intervalo de tempo ∆t para passar por C, e se esse trem de ondas é
composto de ∆n ondas, então o número de ondas que passa por C por unidade
de tempo será a freqüência da onda:
∆n
= N.
∆t
Como a velocidade das ondas é constante, é óbvio que esse número é constante
para qualquer ∆n e para o correspondente ∆t, portanto é o mesmo para ∆n = 1
(uma onda), o intervalo de tempo sendo nesse caso T , o período, logo:
N=
1 onda 1
= ,
T
T
isto é, a freqüência é o inverso do período.
O número de ondas que passa por C pode ser muito grande, isto é, as ondas
se sucedem sem interrupção durante um intervalo de tempo muito grande, o
qual pode ser considerado infinito para facilitar os cálculos.
17.5
A onda senoidal
Suponhamos que o ponto produz as ondas execute um movimento harmônico
simples, e que esse movimento se propague, sem modificação alguma, com
velocidade v constante, a todo meio. Qual a forma da onda nesse caso? Veja
Fig. 17.5. O meio adquire a forma da figura onde se vê um trem de ondas com
4 ondas completas. A partícula no seu movimento harmônico simples arrasta
todas as outras nesse movimento e elas executarão com um atraso τ o mesmo
“ADT-MF” — 2005/11/7 — 8:51 — page 571 — #571
571
17.5. A onda senoidal
Figura 17.5: Trem de ondas senoidais.
movimento harmônico simples, com a mesma amplitude A e a mesma freqüência ω = 2πN, por hipótese. Assim o movimento no ponto x1 , por exemplo, terá
um deslocamento
a = A sen(ω(t − τ)) ,
em que ω = 2πN = 2π/T , e onde τ é o atraso com o que o movimento se inicia
em x1 , isto é, τ é o intervalo de tempo que o movimento leva para chegar a x1
com velocidade v, logo τ = x1 /v e assim:
a = A sen(ω(t −
x1
)) .
v
Essa função fornece o movimento ondulatório originado num ponto do meio
que executa um MHS de equação a = A sen(ωt). Podemos pôr essa função sob
outra forma:
ωx1
)
v
2πN x1
= A sen(ωt −
)
v
2πx1
= A sen(ωt −
)
vT
2π
= A sen(ωt −
x1 ) .
λ
a = A sen(ωt −
Costuma-e representar pela letra k o coeficiente 2π/λ, i.e., k = 2π/λ, o que
constitui uma grandeza muito importante no movimento ondulatório, conhecido por número de onda circular, enquanto o inverso do comprimento de onda
é chamado número de onda.
O estudante pode ficar achando que o argumento das funções nas equações
anteriores são muito diferentes daquele que aparece na expressão a = f (x−vt),
já obtido para a função de onda. É fácil ver que o argumento da função pode
“ADT-MF” — 2005/11/7 — 8:51 — page 572 — #572
572
Capítulo 17. Movimento ondulatório
se reduzir ao mesmo, pois v = λN = λ/T e assim:
a = f (x − λNt)
x
= f (λ( − Nt)) , multiplicando e dividindo por − 2π :
λ
−λ
2π
= f ( (2πNt −
x))
2π
λ
2π
x) ,
= f1 (ωt −
λ
tendo-se incluído a expressão
f1 = A sen(ωt − 2π
λ x).
−λ
2π
na função f1 . Se o movimento é senoidal,
Exercício 17.1. Verifique se a função φ = A sen(ωt− 2π
λ x) é solução da equação
da onda: 1
∂φ
∂φ
= v2 2 .
∂t2
∂x
17.6
Ondas transversais e ondas longitudinais
17.6.1
Ondas transversais
No tipo de ondas que acabamos de considerar, o movimento das partículas do
meio se efetua na direção transversal (ortogonal) ao movimento de propagação da onda no meio. A direção x é a direção de propagação do movimento
ondulatório e as partículas vibram na direção ortogonal a. Esse tipo de onda
em que as partículas vibram na direção transversal à direção de propagação do
movimento ondulatório se denomina onda transversal.
17.6.2
Ondas longitudinais
Há outro tipo de movimento ondulatório extremamente importante, que é aquele em que as partículas vibram na mesma direção da propagação do movimento
ondulatório. As ondas, nesse caso, se denominam ondas longitudinais.
Os dois tipos de ondas podem ocorrer nos sólidos, líquidos e gases. Nos
fluidos, as ondas transversais podem ocorrer na superfície de separação entre
dois fluidos ou duas camadas do mesmo fluido de diferentes densidades, água
doce e água salgada, ou ocasionadas por diferenças de temperatura, como por
exemplo na atmosfera terrestre, em que pode haver camadas de ar de densidades diferentes ocasionadas por diferença de temperatura. Na superfície de
1
Determine as derivadas segundas de φ(x, t).
“ADT-MF” — 2005/11/7 — 8:51 — page 573 — #573
17.7. Aplicações da equação da onda
separação podem surgir ondas de velocidade pequena, ao longo da superfície
aparecem condensações periódicas de vapor d’água formando faixas paralelas
de nuvens brancas. Nas superfícies da água, as partículas descrevem movimentos circulares e no seu conjunto formam uma onda progressiva não-senoidal.
17.7
Aplicações da equação da onda
17.7.1
Cordas vibrantes
Suponhamos uma corda de um material qualquer esticada sob uma tensão F
por suas extremidades. Para desenvolver o estudo do movimento ondulatório
da corda, podemos supor que ela tenha um comprimento muito grande, de
modo que não precisemos considerar os efeitos advindos das suas extremidades, nas quais ocorrem reflexão de ondas, a onda refletida superpondo-se a
onda direta, o que complica o estudo. Podemos, deste modo, supor uma onda
percorrendo a corda cuja direção é a direção x. Veja Fig. 17.6a. Na Fig. 17.6b
(a)
(b)
Figura 17.6: Situação de uma onda transversal no instante t; a figura (b) é um detalhe
da figura (a).
ampliamos a onda da Fig. 17.6a para analisá-la, vemos um elemento ∆x da
corda em vibração transversal, suas extremidades 1 e 2 têm ordenadas a e a0 , e
estão submetidas às forças F~ e F~ 0 produzidas pela tensão, respectivamente. A
amplitude da onda é relativamente pequena em relação ao seu comprimento λ,
de modo que podemos considerar a inclinação do elemento ∆x, em relação à
posição de repouso x como muito pequena, isto é, o ângulo θ é muito pequeno.
~ = F~ + F~ 0 , desA resultante das forças externas que atuam no elemento x será R
~
prezando o peso do elemento ∆x por ser muito pequeno em relação às forças R.
573
“ADT-MF” — 2005/11/7 — 8:51 — page 574 — #574
574
Capítulo 17. Movimento ondulatório
~ sobre x e sobre a direção ortogonal a x, teremos:
Projetando R
R x = F 0x + F x = F 0 cos θ0 − F cos θ ;
Ra = Fa0 + Fa = F 0 sen θ0 − F sen θ ,
em que θ e θ0 são ângulos com a direção x.
Vamos admitir a hipótese deque não haja deslocamento de ∆x ao longo
de x, desse modo a aceleração ao longo de x será nula, isto é:
F 0 cos θ0 − F cos θ = 0 .
Desenvolvendo cos α em série de Taylor:
cos α = 1 +
1 2 1 4
α + α + ...
2
4
como θ e θ0 são muito pequenos, podemos desprezar os termos após o primeiro
termo do respectivo desenvolvimento, isto é, cos θ ≈ cos θ0 ; como, pela hipótese
anterior, F 0 cos θ0 − F cos θ = 0, logo F 0 = F, ou seja, o módulo da tensão ao
longo da corda não varia quando ela vibra. Vejamos a componente ortogonal
a x:
F 0 sen θ0 − F sen θ = mγ , como F 0 = F
F sen θ0 − sen θ = mγ ,
fazendo:
sen θ0 − sen θ = ∆ sen θ =
∂ sen θ
∆x
∂x
e tendo em vista que θ pe muito pequeno:
sen θ ≈ tan θ =
e assim
∂
∂ ∂a ∂2 a
sen θ =
=
∂x
∂x ∂x ∂x2
logo:
F
portanto:
∆a ∂a
≈
∆x ∂x
∂2 a
∂2 a
∂2 a
∆x
=
mγ
=
(µ∆x)
,
pois
γ
=
,
∂x2
∂t2
∂t2
∂2 a F ∂2 a
=
µ ∂x2
∂t2
“ADT-MF” — 2005/11/7 — 8:51 — page 575 — #575
17.7. Aplicações da equação da onda
que é a equação da onda, i.e., a equação diferencial do movimento da onda na
corda. Comparando com a equação (17.2) se tira a velocidade de propagação
da onda na corda:
s
F
v=
µ
Exercício 17.2. Uma corda de fio de cobre é esticada e presa pelas extremidades em uma tensão F = 1 kgf. Sua massa total é de 20 g e mede 80 cm. Calcule
a velocidade da onda transversal nessa corda.
Temos
cm) = (1/4) g/cm; F = 1 kgf = 9,8×105 dyn; portanto:
p µ = (20 g)(80
v = F/µ ≈ 2×103 cm/s = 20 m/s
17.7.2
Reflexão de onda numa corda vibrante –
Ondas estacionárias
Suponhamos uma corda vibrante de comprimento L presa pelas extremidades.
Uma onda gerada, por exemplo, na extremidade 1, em que, supostamente, se
desfez a fixação, momentaneamente, progride na corda até a extremidade 2 e
aí se reflete. Vejamos em que consiste essa reflexão: a extremidade 2 não pode
vibrar pois está fixada, a partícula imediatamente anterior à 2 exerce sobre 2
uma força para deslocá-la na direção ortogonal à direção da corda, a 2 reage
forçando-a na mesma direção mas no sentido contrário, isto significa que se
origina na partícula 2 um movimento ondulatório de sentido contrário, a onda
muda de fase de 180◦ e muda o sentido de propagação. Veja Fig. 17.7 A e B.
Diz-se que a onda se refletiu na partícula mudando a fase, é claro que sua ve-
Figura 17.7: Onda transversal (A) e a onda refletida (B).
locidade também mudou de sentido, pois a onda percorre a corda no sentido
inverso. Ao chegar à partícula 1, o processo se repete como na extremidade 2,
a onda se inverte novamente, sua velocidade muda de sentido e ela reassume o
mesmo aspecto da Fig. 17.7A. Se não houver perda de energia essa onda ficará
percorrendo a corda da extremidade 1 para a 2, da 2 para 1, novamente de 1
para 2, etc., indefinidamente. O estudante poderá indagar: e se nós gerarmos
575
“ADT-MF” — 2005/11/7 — 8:51 — page 576 — #576
576
Capítulo 17. Movimento ondulatório
uma onda no ponto médio da corda, por exemplo, isto é, se deslocarmos momentaneamente o ponto médio da corda, o que acontecerá? É óbvio que nesse
caso o ponto médio P da corda, tendo executado uma vibração, originará uma
onda para a direita e outra para a esquerda. Como o material da corda é o
mesmo, homogêneo, e sua tensão é a mesma ao longo do seu comprimento,
a velocidade das duas ondas terá o mesmo valor, apenas sentidos contrários,
deste modo, se a equação da onda que progride para a direita é a1 = f (x − vt), a
equação da onda que progride para a esquerda será a2 = f (x + vt), pois a velocidade mudou de sinal; essa expressão também pode ser deduzida diretamente,
como se fez no início do estudo para a onda que progride para a direita. Qualquer ponto da onda pode ser sede do movimento ondulatório, como um ponto
P1 próximo à extremidade 1 ou 2. Essas ondas vão se refletir nas extremidades
fixas 1 e 2 e compor-se, interferirem com as ondas diretas. Nas ilustrações da
Fig. 17.8, as duas ondas no meio da corda se refletem nas extremidades 1 e
2, passam uma pela outra interferindo e prosseguem em seguida como se não
tivesse havido nada.
Observe-se que a função de onda que se reflete na extremidade 2 terá a
expressão a02 = − f (x+vt). Se a onda é senoidal, teremos:
a1 = A sen(ω[t − (x/v)])
e
a2 = −A sen(ω[t + (x/v)])
Para facilitar, vamos supor ondas senoidais originando-se próximo à extremidade 1 e refletindo-se em 2. Essas ondas interferem umas com as outras
e no ponto x o deslocamento resultante será a soma dos dois:
a = a1 + a2 = A sen(ω[t − (x/v)]) − A sen(ω[t + (x/v)])
= A sen α − sen β
em que
ωx
.
v
α−β
α+β
Como se sabe:
sen α − sen β = 2 sen(
) cos(
).
2
2
ωx
Logo a = 2A sen(− v ) cos(ωt), portanto a = A cos(ωt), isto é, no ponto x a
vibração é harmônica simples; mas a amplitude A é variável com x:
ωx
A = 2A sen(− )
v
e como ω = 2πN e v = λN, tem-se:
2πx
A = 2A sen(−
).
λ
α = ωt −
ωx
v
e
β = ωt +
“ADT-MF” — 2005/11/7 — 8:51 — page 577 — #577
17.7. Aplicações da equação da onda
Figura 17.8: Propagação de uma onda gerada no ponto médio P da corda.
577
“ADT-MF” — 2005/11/7 — 8:51 — page 578 — #578
578
Capítulo 17. Movimento ondulatório
17.7.3
Condições de contorno
As condições de contorno são condições que a função de onda deve satisfazer
na fronteira ou no contorno do meio, isto é, neste caso, nas extremidades da
corda; na partícula 1 fixada, a amplitude é nula, o que se verifica pois, para
x = 0, A = 0; na partícula 2, também fixada, devemos ter ainda A = 0, ora,
na partícula 2, x = L, o comprimento da corda, logo: 2π
λ L = jπ, em que j é um
número inteiro, logo: λ = 2Lj . Como a velocidade da onda fica determinada pela
p
tensão na corda (F) e pela densidade da corda (µ), v = F/µ, e como v = λN,
então
s
1
v
F
.
= j
N= j
2L
2L µ
q
1
F
Isto é, a freqüência é múltipla de 2L
µ . Esse resultado pode ser resumido
dizendo-se que numa corda de massa específica µ e de comprimento L presa
pelas duas extremidades e sobpuma tensão F , as freqüências de vibração são
múltiplas inteiras de [1/(2L)] F/µ . Observe-se que a corda só pode vibrar
com essas freqüências, ou ainda, que a onda que percorre a corda é tal que
o comprimento da corda é múltiplo inteiro de semi-comprimentos de onda
L = j λ/2. Isto significa ainda que se agitarmos ou sacudirmos um ponto da
corda com uma freqüência diferente dos valores acima, a corda não entra em
vibração, não haverá ondas percorrendo a corda, ou seja, as freqüências e os
comprimentos de onda possíveis são:
s
1
F
N j = j
2L µ
e
λj =
1
2L ,
j
em que j ∈ N.
Para cada valor de j ∈ N haverá um modo de a corda vibrar, ao variar j obtemos
os diferentes modos de vibração da corda. Por outro lado, para cada valor de j
haverá pontos da corda que ficam parados, ficam estacionários: para j = 1 são
as duas extremidades da corda apenas que ficam estacionários e, nesse caso,
λ = 2L, a corda toda vibra entre duas posições extremas, e no decorrer do tempo
cada ponto x vibrará harmonicamente entre esses extremos. Veja as ilustrações
da Fig. 17.9 que mostram vários modos de vibração da corda
A corda apresenta assim um aspecto estacionário, e por isso as ondas se
denominam ondas estacionárias.
O modo para j = 1 se denomina modo fundamental, ou harmônico 1, ou
ainda primeiro harmônico, e os outros harmónicos 2, 3, 4, etc. A corda só pode
“ADT-MF” — 2005/11/7 — 8:51 — page 579 — #579
579
17.7. Aplicações da equação da onda
1o . λ1 = 2L
2o . λ2 = L
3o . λ3 = 23 L
4o . λ4 = 21 L
etc.
L = 12 λ1
L = λ2
L = 32 λ3
L = 2λ4
Figura 17.9: Modos de vibração da corda L = j λ/2.
vibrar com o harmônico fundamental e seus múltiplos inteiros. Os pontos fixos
se denominam nós, e os pontos que vibram, ventres.
Esse exemplo é muito importante para o estudante compreender os postulados da Mecânica Quântica, pois neste caso, nem todos os valores da freqüência
ou do comprimento de onda são possíveis ou permitidos na corda, tendo em
vista as condições de contorno, o movimento ondulatório está quantizado. A
passagem de uma onda de uma freqüência para outra não pode ser feita contiq
1
nuamente, mas por múltiplos inteiros da freqüência fundamental N1 = 2L
N2 = 2N1 , N3 = 3N1 , N4 = 4N1 , etc.
17.7.4
F
µ,
Exercícios
Exercício 17.3. Um fio de cobre está esticado entre duas fixações distantes
de 50 cm, com uma tensão de 200 gf. Pede-se determinar as freqüências e
comprimentos de onda das ondas estacionárias correspondentes aos harmônicos 1, 2 e 3. A massa do fio de cobre em um metro é de 4 g.
Resposta
Nj =
1
2L
q
F
µ
;
λj =
2L
j
;
v=
2L
j
;
“ADT-MF” — 2005/11/7 — 8:51 — page 580 — #580
580
Capítulo 17. Movimento ondulatório
e mais
µ=
m
4g
=
= 4×10−2 g/cm ;
L
100
cm
s
v=
200 × 980 dyn
= 22,1 m/s
4×10−2 g/cm
1
v = 22,1 Hz
2L
N2 = 2N1 = 44,2 Hz , etc.
N1 =
λ1 = 2L = 100 cm
λ2 = λ1 /2 = 50 cm , etc.
Exercício 17.4. Uma corda de látex que tem massa de 0,36 g por metro é
fixada entre dois pontos distantes de 50 cm sob uma tensão de 10 gf. Pede-se
os harmônicos 1, 2 e 3.
Exercício 17.5. A corda de látex do exercício anterior é fixada em dois pontos
distantes de 35,3 cm sob uma tensão de 10 gf Pede-se os harmônicos 1, 2, 3, 4
e 5; e os respectivos comprimentos de onda.
Exercício 17.6. Um fio de cobre é fixado entre dois pontos distantes de 50 cm
sob uma tensão de 103,6 gf.
1. Qual a freqüência do fundamental e do 2o harmônico?
2. Onde devemos fixar essa corda para que o novo fundamental seja igual
ao segundo harmônico do item anterior?
Exercício 17.7. Executou-se a seguinte experiência: um fio de cobre de massa
específica linear µ1 = 2,350 g/m foi esticado por meio de uma mola de coeficiente k1 = 37 gf/cm, com tensões 103,6 gf e 340,4 gf para obter fundamentais
quando fixado entre dois pontos cuja distância era determinada para isso.
Essa corda 1 foi usada como fonte de freqüência pré-determinada para acionar uma corda de látex de massa específica linear µ2 = 36×10−2 g/m, fixada
entre dois pontos distantes 35,5 cm sob uma tensão de 10 gf fornecida por
uma mola de constante elástica k2 = 4 gf/cm. Veja na Fig. 17.10 o esquema da
ligação da corda 1, excitadora, com a corda 2 de látex.
A corda 1 foi dedilhada num ponto próximo à extremidade ligada à mola 1
e numa direção ortogonal ao plano das duas cordas, isto é, ortogonal ao plano
do papel na Fig. 17.10, a fim de produzir vibrações ortogonais à direção da
“ADT-MF” — 2005/11/7 — 8:51 — page 581 — #581
581
17.7. Aplicações da equação da onda
corda 2. O fundamental da corda 1 produzia uma freqüência Nc1 que era transmitida à corda 2 que só vibrava quando um de seus harmônicos coincidia com
esse fundamental. Obtivemos assim na corda 2 todos os harmônicos 1, 2, 3, 4
e 5, e as respectivas ondas estacionárias.
⇐⇒
Figura 17.10: Esquema do dispositivo do exercício 17.7.
A redação do exercício não está completa. Mantivemos este fragmento para
que se tenha uma idéia da intensão do autor na continuidade do seu projeto.
“ADT-MF” — 2005/11/7 — 8:51 — page 582 — #582
582
“ADT-MF” — 2005/11/7 — 8:51 — page 583 — #583
Apêndices
583
“ADT-MF” — 2005/11/7 — 8:51 — page 584 — #584
“ADT-MF” — 2005/11/7 — 8:51 — page 585 — #585
Apêndice A
Coletânea de Preâmbulos dos
Fascículos
Optamos por pôr seqüencialmente os Preâmbulos dos Fascículos I–VI, deixando como Preâmbulo da obra o do 0 (zero). A leitura em seqüência dá moldura ao pensamento do autor.
A.1
Preâmbulo do Fascículo 0 1
Ao escrever este livro pensamos no estudante que deseja realmente aprender
física e que em geral não vê muita relação entre o que aprende, o que o cerca
e, principalmente, o laboratório; seja porque não existe, seja porque quando o
alcança se perde na sua complexidade. A Física Experimental não é fácil,
exige o conhecimento dos fenômenos, conceitos, leis e princípios; exige o
conhecimento da matemática para representá-los e para desenvolvê-los em
teoremas e para resolver problemas teóricos e práticos, e para alcançar
aplicações tecnológicas. Como aprender física para chegar à plena realização
do conhecimento teórico e experimental ou tecnológico?
Existem excelentes livros e manuais de Física, nacionais e estrangeiros. Seus
autores, de modo geral, procuram dar a explicação dos fenômenos, leis,
princípios e conceitos físicos com muitos problemas; mas não se preocupam
com a parte do laboratório que é deixada para os manuais práticos; estes
relacionam as experiências sem inseri-las num contexto teórico. Neste livro
procuramos, a partir de observações e experiências simples, conduzir o
1
Foi posto como ‘Orientação ao Estudante’, pág. 21.
585
“ADT-MF” — 2005/11/7 — 8:51 — page 586 — #586
586
Apêndice A. Coletânea de Preâmbulos dos Fascículos
estudante para a parte teórica e em seguida para suas aplicações teóricas e
experimentais. Como não podia deixar de ser, acompanha este livro o
Laboratório Portátil que é parte integrante do curso. Com ele, o estudante
poderá realizar as experiências básicas necessárias a um desenvolvimento do
conhecimento de Física Geral e Experimental. Procuramos sempre que
possível e desejável recordar a matemática necessária, mostrando seu
relacionamento com a física experimental. Sabemos que muitas vezes os
conhecimentos de matemática do estudante de física ou não existem ou jazem
em seu subconsciente sem nenhum relacionamento com as experiências de
Física, daí esse nosso empenho.
Rio de Janeiro, 20 de agosto de 1976
Armando Dias Tavares
A.2
Introdução do Fascículo I
Está posto como ‘Orientação ao Estudante’, na Apresentação, pág. 22.
A.3
Preâmbulo do Fascículo II
Neste capítulo desenvolveremos completamente o conceito de grandeza física
vetorial, e, com não podia deixar de ser, abordamos o conceito de vetor do
ponto de vista da matemática.
Pode parecer fora de propósito desenvolver num livro de Física Experimental
conceitos tão abstratos como aqueles aqui abordados, mas parece-nos que, do
ponto de vista da Psicologia da Aprendizagem, é necessário que o estudante
veja como de objetos concretos se chega a entes abstratos que possuem todas
as propriedades gerais que são relevantes na formação (e generalização) dos
conceitos respectivos; a compreensão perfeita do conceito dará ao estudante
uma visão ampla e sintética do objeto em estudo, permitindo-lhe separar
corretamente qualquer coleção de objetos concretos (mensuráveis) aqueles
que possuem os atributos necessários e suficientes para serem classificados e
nomeados dentro das respectivas categorias. Por outro lado, o estudante, já
motivado para o estudo da Física Experimental, verá que a Matemática
Abstrata lhe dará domínio muito maior dos conceitos físicos, tirando, por
assim dizer, o mistério desses conceitos. Esse fato lhe dará motivação e
vivência para o estudo dessa Matemática que é indispensável à Física e que o
estudante muitas vezes despreza por não ver nenhuma relação com a Física
“ADT-MF” — 2005/11/7 — 8:51 — page 587 — #587
587
A.4. Preâmbulo do Fascículo IV
Experimental, ou mesmo como a Física Teórica, o que lhe trará graves
prejuízos nos seus estudos posteriores.
A.4
Preâmbulo do Fascículo IV
Ver parágrafo 4.6.4, pág. 209.
A.5
Preâmbulo do Fascículo V 2
Neste “fascículo” apresentamos o estudo da Cinemática, fazendo-o preceder
de considerações sobre sistemas inerciais, já que esse estudo se destina
basicamente à Dinâmica. A ênfase recai como sempre na conceituação; aqui
se trata do vetor deslocamento, do vetor velocidade e do espaço percorrido,
sendo freqüente a confusão do primeiro com o último, por parte do estudante.
Para que ficasse bem claro o conceito dessas grandezas, fizemos o estudo do
movimento no plano e não sobre a reta, como se faz habitualmente no
pressuposto de que a matemática ficará mais simples; entretanto os conceitos
de vetor velocidade e de vetor deslocamento se confundem com os de
grandezas algébricas, e por vezes aritméticas, de tal modo que o estudante ao
calcular o espaço percorrido calcula o deslocamento acertando eventualmente
ou errando e sem saber porque está errando e sem saber encontrar o erro.
Pensamos que se torna mais fácil mostrar as grandezas vetoriais como são do
que procurar simplificá-las, transformando-as em casos particulares mais
simples que, porém, podem conduzir o estudante a erros conceituais, como
temos tido ocasião de observar.
Como é óbvio, fazemos uso mais extenso da geometria analítica e do cálculo
diferencial e integral, mostrando suas aplicações na cinemática. É necessário
que o estudante se esforce em aprender a matemática afim, a fim de que os
conceitos físicos possam ser aprendidos com a matemática necessária
a aplicações usuais e não somente as aplicações de casos particulares triviais.
Rio de Janeiro, 25 de julho de 1979
Armando Dias Tavares
2
Correspondente ao Cap. 5, pág. 233.
“ADT-MF” — 2005/11/7 — 8:51 — page 588 — #588
588
Apêndice A. Coletânea de Preâmbulos dos Fascículos
A.6
Preâmbulo do Fascículo VI 3
No estudo elementar da aceleração que apresentamos neste fascículo
procuramos desenvolver, por completo, o caráter vetorial dessa grandeza, e
aplicar os conhecimentos de Cálculo Integral e Vetorial que o estudante deve
ter estudado nas disciplinas de Matemática. O objetivo é duplo: primeiro para
exprimir corretamente as grandezas vetoriais e suas conseqüências e segundo
para motivar o estudante ao estudo da Matemática, sem a qual não pode ter
uma descrição adequada e sintética dos fenômenos Físicos. Chamamos,
porém, sua atenção para o fato de que ele não deve “decorar” fórmulas
matemáticas, mas deve decorar o processo de obtenção das fórmulas
matemáticas 4 como exercício e o desenvolvimento dessa habilidade
intelectual (mental), ele poderá deduzí-las em frações de minutos a partir de
uns poucos dados, definições e postulados iniciais, os quais, esses sim, devem
estar gravados na memória permanente. Deste modo, paradoxalmente chegará
a saber de cor, aparentemente, uma quantidade muito grande de fórmulas e
expressões úteis no uso da Física.
Poderá parecer exagerado desenvolver o que se convencionou chamar de
Física Geral e Experimental do modo pelo qual o fazemos aqui, entretanto é
preciso lembrar que se trata de um curso superior básico e que supõe dever
ser continuado de modo mais profundo seja nas disciplinas técnicas seja nas
científicas que se lhe seguem; neste aspecto, temos notado que os cursos
convencionais não são suficientes, exatamente porque não querem apresentar
a Física num nível em que a matemática superior seja utilizada de modo mais
amplo com o receio de que o estudante não possa entendê-la e assim reagir
negativamente. Nossa experiência no ensino mostra o contrário.
Rio de Janeiro, 7 de agosto de 1979
Armando Dias Tavares
3
Correspondente ao Cap. 7, pág. 297.
O que significa que ele deve aprender a deduzir essa fórmulas de maneira perfeita
sem titubear.
4
“ADT-MF” — 2005/11/7 — 8:51 — page 589 — #589
Apêndice B
Discurso de Paraninfo da turma
de Licenciados em Física da
Universidade Federal do Rio de
Janeiro, ano de 1981
Exmo. Sr. Diretor do Instituto de Física
Prof. Eugênio Loerner
Exmo. Sr. Diretor Adjunto de Graduação
Prof. Edson Pereira dos Santos
Demais Autoridades Presentes
Ilmos. Srs. e Sras.
Meus caros Licenciandos 1
1. Confesso que fiquei surpreso pelo convite que me fizeram para ser
paraninfo da turma. Fui professor de vocês apenas num semestre de
Instrumentação para o Ensino II. Disseram que me escolheram porque
estou mais diretamente ligado ao curso de Licenciatura que sempre
1
u Transcrito da cópia do discurso datilografado pelo autor, obtida dos arquivos do Prof.
Joaquim Pereira Neto.
589
“ADT-MF” — 2005/11/7 — 8:51 — page 590 — #590
590
Apêndice B. Discurso de Paraninfo
defendo e procuro valorizar. Entretanto minha voz produz uma nota
dissonante no coro de vozes na Universidade. Estou ficando velho, com
certeza é por isso. Fiz o curso primário há mais de 50 anos, numa
escola primária da Prefeitura do então Distrito Federal, na Escola
Piauhy, em Bonsucesso, aqui perto.
2. Bonsucesso era um subúrbio miserável da Leopoldina; parca
iluminação; sem calçamento nas ruas; sem esgotos; com febre amarela,
impaludismo, e tuberculose.
3. As aulas começavam às 7 da manhã e se prolongavam até o meio dia.
Havia um intervalo de 12 hora, às 10 horas, para o recreio, durante o
qual aqueles que quisessem podiam comer um pedaço de pão com
manteiga trazido de casa. Não havia merenda escolar.
4. As professoras formadas no Instituto de Educação, nunca faltavam e
eram muito competentes.
5. No curso primário, aprendíamos a ler e a escrever, havia aula de
ortografia. Aprendíamos as 4 operações, somar frações, resolver
carroções, regra de três simples e composta, juros simples e composto,
câmbio e a resolver problemas de aritmética. Aprendíamos geometria
elementar, a calcular a área de figuras planas: quadrados; retângulos;
triângulos; trapézios e círculos; a determinar o volume de cubos,
paralelepípedos, pirâmides, cone e esfera.
6. Aprendíamos a conjugar os verbos em todos os tempos e modos,
incluindo os verbos irregulares, o uso e colocação de pronomes
oblíquos, a fazer análise gramatical e análise lógica, e a fazer
composição. Ao terminar a 4a série primária ganhei 2 livros: História
da Carochinha e História dos Irmãos Grimm. Tomei gosto pela leitura.
7. Na 5a série recebemos da Escola um livro: Antologia Brasileira,
contendo uma excelente seleção de trechos de escritores e poetas
portugueses e brasileiros, ilustrado e comentando várias escolas
literárias. Era o livro e leitura na Sala de Aula.
8. Aprendíamos desenho a mão livre; e, em Lições de Coisas, noções de
ciências e higiene. Estudávamos Geografia e História do Brasil,
tínhamos de fazer mapas do Brasil e do Mundo, com acidentes
geográficos, as capitais e cidades principais dos vários países em todos
os continentes.
“ADT-MF” — 2005/11/7 — 8:51 — page 591 — #591
591
9. As matérias estudadas eram Português, Matemática, Geografia, Ciência
e Desenho a Mão Livre, com ênfase em Português e Matemática.
Aprendíamos ainda a cantar o Hino Nacional, o Hino à Bandeira, o
Hino da Independência, etc.
10. O primário tinha 5 anos. Ao terminá-lo, um tio meu colocou a nossa
disposição sua biblioteca: uma estante pequena, cheia de livros de
Literatura: Miguel Zevaco, Eça de Queiroz, Camilo Castelo Brando,
José de Alencar, Machado de Assis, Coelho Neto, etc.
11. A leitura desses livros me proporcionava imensa satisfação e prazer.
12. Ao entrar para o ginásio houve um rebaixamento de nível,
consubstanciado na reforma Francisco de Campos, posta em vigor
naquele ano.
13. Para entrar para o ginásio tínhamos de fazer o exame de Admissão. O
ginásio tinha 5 anos. Com os conhecimentos que tínhamos do primário
não precisávamos estudar até o 3o ano ginasial. Estudava-se Português
e Matemática da 1a à 5a série. Ciências, História e Geografia iam até à
3a , bem como o Francês e o Inglês; Latim começava na 4a série e se
prolongava na 5a . Na 4a e 5a séries, a História Natural se subdividia em
Zoologia, Botânica e Mineralogia.
14. Quando terminávamos o Ginásio sabíamos: trigonometria, álgebra
elementar, noções de geometria analítica, derivação e integração,
calcular áreas e volumes por meio de integração. Sabíamos alguma
coisa de Química e Física (parte descritiva), Zoologia e Botânica eram
bem estudadas, Mineralogia porém não era dada. Fizemos o curso
ginasial num colégio do interior, o Colégio Modelo, em Friburgo.
15. O Colégio Pedro II, no Rio, era o Colégio Padrão. Orientava o ensino
secundário em todo Brasil, fornecendo programas oficiais, calendário
escolar, e punha livros à disposição dos professores, escritos pelos
catedráticos do Pedro II: em Matemática, da 1a a 5a série, era o Cecil
Thyré e Melo e Souza; Zoologia, Botânica e Mineralogia eram Mello
Leitão e Lafayette Pereira, etc. O Inspetor Federal ia a Friburgo
fiscalizar o Colégio, as provas, exames, etc.
16. Terminado o ginásio, fui trabalhar numa farmácia como prático de
farmácia, e sob a orientação do farmacêutico, pouco tempo depois,
“ADT-MF” — 2005/11/7 — 8:51 — page 592 — #592
592
Apêndice B. Discurso de Paraninfo
estava aviando receitas, preparando remédios, pomadas, etc. Tudo isso
era-me fácil dados os conhecimentos de química e botânica que
aprendera. Se tivesse tido oportunidade, poderia ter trabalhado como
tradutor de Francês e Inglês e com um pouco de treino servir de
intérprete de Francês. Na Farmácia ganhava muito pouco. Tinha que
arranjar um emprego mais rendoso. Foi quando houve concurso para o
Instituto de Pensões e Aposentadoria dos Industriários. Tinha de fazer o
concurso, no qual entrava, porém, datilografia. A família se mobilizou,
um tio arranjou uma máquina de escrever emprestada, um primo o livro
para o estudo da datilografia, e assim, num mês preparei-me, estudando
sozinho, para o concurso, no qual passei. Não havia Curso
Profissionalizante.
17. Posteriormente ao curso ginasial havia o Curso Complementar, com 2
anos. Era um curso pré-universitário. Nesse curso havia uma
intensificação das matérias científicas do ginásio, conforme a área
escolhida: medicina; farmácia; odontologia, Curso Complementar de
Medicina; engenharia; arquitetura, Curso Complementar de
Engenharia, etc. Como desejava estudar Biologia Matemática, ou (sic)
Bio Física, fiz o curso Complementar de Medicina. No 1o ano
tínhamos: Matemática, com geometria analítica, álgebra,
determinantes, séries, cálculo diferencial e integral, equações
diferenciais; Inglês Científico; no 1o e 2o anos tínhamos: Biologia;
Botânica; Zoologia; Física; Química Orgânica e Inorgânica; Psicologia
e Sociologia.
18. Deste modo os cursos primário e secundário completos tinham 12 anos.
Incluindo o primário, tínhamos 10 anos de Matemática, com 2 anos de
cálculo diferencial e integral, 5 anos de Física, 5 anos de Química e 5
anos de História Natural.
19. Entretanto havia uma facção de líderes e intelectuais que não estava de
acordo com a reforma de Francisco de Campos e escreviam artigos e
livros mostrando o absurdo de tal reforma, a qual seria prejudicial à
formação cultural do jovem. Em Friburgo, ainda no ginásio, líamos os
artigos do padre Arlindo Vieira, que liderava a anti-reforma,
principalmente porque haviam retirado do ginásio o estudo do Grego e
quase eliminado o estudo do Latim, reduzido a 2 anos. Seus
argumentos eram para nós tão convincentes que resolvemos estudar
Grego. Essa corrente acabou vencendo, e veio uma reforma pondo o
“ADT-MF” — 2005/11/7 — 8:51 — page 593 — #593
593
Latim da 1a à 4a séries ginasiais, retirando as matérias científicas. Era o
predomínio do Humanismo sobre o Cientificismo.
...............
20. Quando entrei para a Universidade tinha um bom conhecimento de
Matemática, Física, Química, História Natural, Português, Francês e
Inglês.
21. O curso na Universidade foi muito bom. Apenas a Universidade era
pobre no que diz respeito a Laboratórios. Assim, por exemplo, em todo
o meu curso de Física Geral e Experimental fiz apenas uma experiência
de Física. Os professores universitários ganhavam muito pouco, não
havia tempo integral, dedicação exclusiva ou auxílio para a pesquisa.
Por isso mesmo os professores universitários davam aula no curso
secundário de Prefeitura que pagava o famoso padrão O. Depois esse
salário foi-se aviltando e em 1960 era apenas 10 salários mínimos.
22. Joaquim da Costa Ribeiro foi meu professor de Física Geral e
Experimental durante dois anos. Sua aula inaugural entusiasmou-se,
fazendo-me decidir pelo estudo da Física. Foi um grande mestre,
exímio Físico Experimental; abnegado, nunca faltava à aula nem
chegava atrasado. Com família numerosa, teve nove filhos, dava aulas
para sobreviver. Mas, desenvolveu a Física en Universidade; descobriu
um efeito novo, que denominou Efeito Termodielétrico, o qual é hoje
conhecido e estudado no mundo inteiro como Efeito Costa Ribeiro.
Posteriormente, vim a ser seu assistente na Faculdade Nacional de
Filosofia. Também passei a dar aulas no Curso Secundário da
Prefeitura, padrão O. Na Universidade meu ordenado como assistente
era insuficiente. Com o advento do Conselho Nacional de Pesquisas
(CNPq) em 1951, Costa Ribeiro formou um grupo para o Estudo do
Efeito Termodielétrico, obtendo auxílio no CNPq. Deste modo reduzi
minhas aulas de 46 por semana para 33 apenas, 18 na Faculdade e 15
na Prefeitura. Os auxílios que o CNPq concedia eram irrisórios. O
grupo era constituído por mim, Sérgio Mascarenhas, Edson Rodrigues,
Yvonne Primerano, Luiz Paulo Mesquita Maia, Rosa Rabelo e Pedro
Cavalganti, todos com uma bolsa muito pequena do CNPq. Foi um
tempo glorioso, e inolvidável, de trabalho intenso, sem férias, feriados
ou descansos. . . não falarei sobre ele, pois temo exceder-me.
“ADT-MF” — 2005/11/7 — 8:51 — page 594 — #594
594
Apêndice B. Discurso de Paraninfo
23. No curso Científico era professor de Física, dava 5 horas de aula no 1o
ano, 5 no 2o ano e 5 no 3o . O livro adotado era o livro do prof. Luiz
Paulo Mesquita Maia. Pela 1a vez, a física deixava de ser matéria
descritiva simplesmente e passava a ter uma estrutura coerente com
problemas e exercícios. A Mecânica no 1o ano era estudada e
desenvolvida a partir das leis de Newton, com exercícios e problemas
interessantes.
24. Nessa época os alunos, terminado o Científica, faziam o vestibular e
entravam para a Universidade. Mas o ensino foi caindo, porque, me
parece, o salário do professor foi diminuindo com a inflação, e, não
conseguindo aumento os professores arranjavam emprego em outros
Colégios. Os cursinhos passaram a ganhar força e estrutura, efetivando
a desintegração do curso secundário.
25. Os alunos começavam a chegar ao 1o ano do Curso Científico sem o
conhecimento de matemática suficiente para resolver exercícios de
Física, na hora de calcular cometiam erros crassos de matemática
elementar. Não seria assim possível dar o programa de Física exigido.
Para prová-lo, em 1964, fiz um teste de matemática versando sobre
conhecimentos de aritmética, álgebra, geometria elementar e
trigonometria, e que faziam parte dos cursos primário e ginasial. Passei
o teste nas Escolas do Estado e Escolas Particulares, desde o 6o ano
primário até o 3o do Curso Científico; mais de 1000 alunos fizeram o
teste, o qual era passado na turma pelo próprio professor de matemática
ou de física. O resultado foi esclarecedor, mais de 50 % dos estudantes
do 3o ano do Curso Científico não tinham conhecimentos de
matemática suficientes para aprender o que já havia sido aprendido por
outras turmas num passado ressente. Os livros de Luiz Paulo Mesquita
Maia não podiam ser mais adotados no curso. O ensino tinha caido
aceleradamente nos últimos anos. Levei esse resultado às autoridades
competentes que nada fizeram.
26. Uns dois ou três anos depois, iniciaram uma campanha para reformar o
ensino. Quem? Críticas na televisão, principalmente em programas
humorísticos, artigos de jornais de muitos sábios e religiosos. Nos
programas humorísticos focalizava-se um jovem que desejava um
emprego mas que mostrava total ignorância da profissão referente a ele,
relevando entretanto que conhecia de cor fatos de geografia e história,
principalmente, sem nenhuma utilidade prática. Era necessário dar uma
“ADT-MF” — 2005/11/7 — 8:51 — page 595 — #595
595
profissão ao jovem que, coitado dele e dos pais, passava parte de sua
vida freqüentando escolas sem contudo, ao sair, ter os conhecimentos
mínimos indispensáveis a qualquer emprego que lhe fosse oferecido,
apesar de saber muito bem fatos e dados sem nenhuma utilidade. Era
necessário dar uma profissão aos jovens. Sensibilizados e bem
intencionados mais uma vez os padres, abdicando do grego e do latim,
uniram suas forças poderosas no combate ao ensino em vigor, e por fim
apresentaram uma reforma que foi aprovada e que está em uso, que
todos conhecem e cujo objetivo é o Ensino Profissionalizante.
...............
27. Sabendo que o aluno não pode aprender Física sem saber matemática
elementar, na UERJ há mais de 15 anos dou um teste de matemática
indo desde a soma de frações e divisão de números, até o cálculo de
uma área por meio de integral. 80 % dos alunos aprovados no vestibular
revelam não saber somar frações, nada sabendo de trigonometria, etc.
Apenas os conhecimentos de matemática do primário reprovariam
cerca de 70 % dos alunos já aprovados no vestibular. Ainda mais, uns
10 % revelam não possuir os conhecimentos de português para entender
uma aula. Passaram 11 anos de suas vidas nos bancos escolares e não
aprenderam a dividir um inteiro por um decimal, não sabem somar
frações, etc., ou mesmo escrever um simples bilhete, corretamente em
sua lingua materna. Não têm conhecimento suficiente para fazer
qualquer curso superior. Há exceções naturalmente, isto é, alunos que
têm conhecimento adequado de matemática e de português, uns 10 %.
Alguns são excelentes, uns 2 %.
28. Mas e a maioria? São débeis mentais por acaso? Não! Durante 8 anos
procurei recuperar tais alunos e muitos deles se revelaram altamente
inteligentes, capazes mesmo de ultrapassar os colegas com boa base,
destacando-se por fim na turma já no final do curso. São praticamente
analfabetos quando iniciam o curso de graduação, terminando-o,
porém, com destaque e aptos a fazerem cursos de mestrado em outra
Universidade. A culpa pelo seu despreparo não é do estudante mas do
péssimo ensino que tiveram.
...............
29. É preciso restaurar o ensino. A escola foi criada para o aluno estudar,
para aprender, para adquirir cultura, civilizar-se, tornando-se um fator
“ADT-MF” — 2005/11/7 — 8:51 — page 596 — #596
596
Apêndice B. Discurso de Paraninfo
positivo para a sociedade, para dominar um primeiro lugar sua língua
materna que é o seu instrumento de comunicação com os outros; para
dominar a base de toda a tecnologia moderna que é a matemática,
conhecer ciências, história e geografia. O estudante na Escola tem que
aprender a pensar e a tirar conclusões corretas. Tem que adquirir
cultura, pois mesmo que ele pare de estudar após o curso primário ou
ginasial, não podemos negar-lhe uma formação cultural adequada para
a vida moderna, cultura com a qual possa usufruir do convívio com
seus companheiros em palestras e conversas amigáveis, e com a qual
possa compreender e discutir a atuação dos deputados e senadores, de
políticos e religiosos e possa votar conscienciosamente. Tem que ter
cultura que possa desenvolver pelo resto da vida, no mínimo, lendo por
exemplo seu jornal favorito, corretamente escrito em português, e não
como ocorre agora cheio de erros crassos nos tempos verbais, nos
pronomes e na sintaxe. Não é possível qualificar para uma profissão
qualquer, aquele que mal sabe ler, que tem um vocabulário reduzido a
2000 palavras, que não sabe somar, e nada sabe de ciência. Seria
preferível que não tivesse entrado para a Escola, mas que analfabeto
aprendesse com os mais velhos em empregos adequados para crianças,
um vocabulário maior, um acervo de conhecimentos por tradição oral,
muito superior.
30. Saindo de um curso primário ou ginasial bem feito, quanto tempo será
necessário ao jovem para ingressar numa profissão no Comércio ou na
Indústria? Pouco tempo. Sua qualificação poderá ser feita na própria
empresa, com um período de adaptação de um a três meses.
31. Observa-se que o ensino nas grandes cidades é pior que no interior. Já
no meu tempo assim era. Por quê? Pelas múltiplas distrações oferecidas
aos jovens. Pela gama infinita de solicitações para tudo o que não
presta. Nestes 50 anos o ensino foi decaindo sempre, fizeram-se
reformas que o levaram ao descalabro completo. O grau de cultura de
um povo se avalia assistindo aos programas de televisão, observando os
anúncios e novelas, ouvindo as músicas no rádio, lendo os jornais.
32. Ver-se-á que os brasileiros sofrem um processo de imbecilização em
massa. Os anunciantes não usam mais palavras complicadas, apenas
palavras simples, frases curtas, cheias de gíria e onomatopéias, ou
simplesmente mímica: gestos, expressões faciais e sexo. nas grandes
“ADT-MF” — 2005/11/7 — 8:51 — page 597 — #597
597
cidades o descalabro atinge proporções catastróficas.
...............
33. O Magistério é a profissão mais importante de um país, de uma nação.
Quem dominar o ensino de um povo dominará esse povo, levando-o à
ruína em uma geração ou poderá transformá-lo num povo em progresso
contínuo em duas gerações.
34. É necessário que o magistério seja restrito à sua classe, e não dominado
por leigos, comerciantes e políticos ou religiosos. É necessário que os
leigos de todo tipo se afastem do ensino, principalmente da legislação
sobre o ensino. Há pouco tempo, para consubstanciar a reforma de
ensino em 1o e 2o ciclo, e por outros motivos, houve uma reforma nos
cursos de licenciatura, objetivando a formação do professor
“polivalente”, criavam-se para tanto os cursos de licenciatura curta com
dois anos.
O professor polivalente poderia dar aula de qualquer matéria no 1o
ciclo, para isso bastava-lhe estudar na Universidade mais dois anos.
Felizmente essa reforma encontrou a mais veemente oposição por parte
das Universidades Federais e acabou extinguindo-se. Não contentes de
transformarem os cursos primário e secundário em fábricas de
analfabetos diplomados, queriam formar professores analfabetos em
várias disciplinas, fechando o ciclo da analfabetização.
35. Temos de revolucionar o ensino, e essa Revolução só poderá partir do
professor e do estudante. O estudante precisa ser esclarecido para
compreender que há mais um crime organizado contra ele, pela
sociedade como um todo. Começa com sua utilização pelos políticos.
Os estudantes são utilizados para fazer política partidária dentro da
Universidade. Deixam de estudar e aprender, deixam de se dedicar a sua
recuperação do ensino criminoso que os manteve na ignorância durante
11 anos, para dedicar-se à política partidária dentro da Universidade e
no final não têm forças para superarem as dificuldades imensas dos
programas e currículos universitários e acabam desistindo de estudar.
36. Os professores de ensino secundário têm que assumir as rédeas do
magistério, lutar para
uer sua profissão e restaurar o Ensino. Para isso têm que se constituir
numa classe, formar uma associação. Por exemplo, a Associação
“ADT-MF” — 2005/11/7 — 8:51 — page 598 — #598
598
Nacional dos Professores de Ensino Secundário, filiada à Associação
Nacional dos Docentes de Ensino Superior. Juntas, certamente serão
poderosas e importantes do ponto de vista social: é preciso não
esquecer que são os professores que formam a sociedade, que lhe dão
continuidade e que renovam. Os políticos só respeitam os movimentos
de massa, e os professores poderão, como classe coerente, com seu
código de ética profissional, promover o mais sério e importante
movimento de massa para soerguer a sociedade brasileira que marcha
para a decadência e extinção de seus padrões morais e intelectuais,
onde, parece-nos, que o objetivo dos inimigos do povo brasileiro é
transformar as novas gerações num bando de macacos domesticados e
amestrados, incapazes de pensar e tirar conclusões próprias, sabendo
apenas obedecer a ordem simples, secundadas por gestos e mímicas. Os
macacos serão mantidos em número limitado, por todo tipo de controle
de natalidade, para que sejam apenas em número suficiente para
assegurar que os recursos e riquezas fabulosas deste país sejam
convenientemente explorados por empresas estrangeiras que trarão para
cá, seus técnicos, engenheiros e cientistas, que, esses sim, serão os
donos do país.
Armando Dias Tavares
“ADT-MF” — 2005/11/7 — 8:51 — page 599 — #599
Apêndice C
Fac-símile de um artigo
Juntamos nas páginas seguintes cópia em fac-símile de o artigo publicado pelo
autor [28] e citado no final do §9.4, a separata do artigo foi obtida do arquivo
do Prof. Joaquim Pereira Neto.
As correções manuscritas são do autor.
599
“ADT-MF” — 2005/11/7 — 8:51 — page 600 — #600
600
Fac-símile
“ADT-MF” — 2005/11/7 — 8:51 — page 601 — #601
Fac-símile
601
“ADT-MF” — 2005/11/7 — 8:51 — page 602 — #602
602
Fac-símile
“ADT-MF” — 2005/11/7 — 8:51 — page 603 — #603
Fac-símile
603
“ADT-MF” — 2005/11/7 — 8:51 — page 604 — #604
604
Fac-símile
“ADT-MF” — 2005/11/7 — 8:51 — page 605 — #605
Fac-símile
605
“ADT-MF” — 2005/11/7 — 8:51 — page 606 — #606
606
Fac-símile
“ADT-MF” — 2005/11/7 — 8:51 — page 607 — #607
Apêndice D
Fragmentos de “O Ensaiador”
de Galileu Galilei∗
Consideramos conveniente e oportuno transcrever (e por ser extenso pôr em
apêndice) fragmentos de um texto histórico sobre um processo de descoberta
que consta no item 13 de “O Ensaiador” de Galileu [12], “Escrito em Forma
de Carta” e com carta de encaminhamento ao papa Urbano VIII assinada em
Roma, 20 de outubro de 1623, por “Os Acadêmicos Dos Linceus”, com o
frontispício traduzido no quadro à pág. 608.
Em O Ensaiador, Galileu dá resposta a críticas recebidas de “. . . invejosos
daqueles louvores devidos a tão importantes descobertas: nem faltaram
aqueles que, somente para contradizer minhas palavras, não se preocuparam de pôr em dúvida todas aquelas demonstrações que viram e reviram à
vontade com seus próprios olhos.” Significando “viram e reviram à vontade
com seus próprios olhos” as observações que se puderam fazer por meio do
telescópio “descoberto” por Galileu.
“. . . Chegando agora às conclusões específicas, será, certamente, coisa
ótima (para que não permaneça nada sem ser observado) dizer algo sobre
a inscrição da obra que o Sr. Lotário Sarsi intitula Balança Astronômica e
Filosófica.”
Depois de um histórico, Galileu passa a enumerar transcrições da Balança
Astronômica e Filosófica de Sarsi 1 , a cada item transcrito se seguem suas argumentações. Transcrevemos em seguida fragmentos do item 13.
∗
Este apêndice foi incluído por revisor e está remetido pelo parágrafo 1.1.
Lontário Sarsi é pseudônimo do padre jesuíta Horácio Grassi (1583–1654), professor de
matemática no Colégio Romano.
u
1
607
“ADT-MF” — 2005/11/7 — 8:51 — page 608 — #608
608
O Ensaiador
O Ensaiador
Onde
Com Perfeito e Justo Equilíbrio
Raciocina-se Sobre As Coisas Contidas
Na
“Balança Astronômica e Filosófica”
De
Lotário Sarsi Sigensano
Escrita Em Forma De Carta
Ao Ilustríssimo E Reverendíssimo Monsenhor
D. Virginio Cesarini
Acadêmico Linceu
Mestre De Sala De N.S.
Pelo Senhor
Galileu Galilei
Acadêmico Linceu
Nobre Florentino
Filósofo e Matemático Principal
Do
Sereníssimo Grão-Duque Da Toscana
“ADT-MF” — 2005/11/7 — 8:51 — page 609 — #609
O Ensaiador
Sarsi (. . . ) Galileu afirma terem-no ofendido, na esperança de merecer
antes elogio que reprovação, em defender da calúnia essa luneta 2
que, se não é seu filho, com certeza é seu discípulo 3 . (. . . )
Galileu (. . . ) Que o Pe. Grassi não tivesse intenção de me ofender ao
considerar pouco inteligentes aqueles que desprezavam o argumento resultante do pouco aumento do cometa por meio do telescópio,
o acredito com Sarsi; porém, havendo eu já declarado encontrarme naquele número de pessoas, devia-me ser permitido apresentar
minhas razões de defender minha causa, principalmente sendo ela
justa. Quero ainda admitir com Sarsi que seu Mestre 4 com boa intenção sustentasse aquela opinião, acreditando guardar e aumentar
a reputação e o valor do telescópio contra as calúnias daqueles que
o consideravam fraudulento e enganador em óptica, e procuravam
assim despojá-lo de suas inúmeras qualidades. Em relação a isto,
parece-me ser boas e louvável a intenção do padre, porém a escolha e a qualidade da defesa parecem-me ruins e danosas enquanto
querem defender, contra a falsidade dos maldosos, os verdadeiros
efeitos do telescópio atribuindo-lhe outros efeitos errados. Este não
me parece um bom argumento para persuadir da nobreza deste instrumento. Portanto, permita Sarsi desculpar-me se não me apresento
com aquela abundância que talvez pareça a ele conveniente, como
se eu tivesse obrigação para com as novas qualidades e honras atribuídas a este instrumento. E com que razão pretende ele que deve
aumentar em mim a obrigação e a afeição para com eles por causa
dos vãos e falsos atributos, enquanto eles, porque com minhas afirmações verdadeiras os tiro do engano, condenam-me a perder a sua
amizade?
Segue, depois, e não sei com quanta oportunidade se chama o
telescópio discípulo meu e se chegue a descobri-lo até sendo meu
filho. O que faz, sr. Sarsi? Enquanto tenta fazer-me interessar pelas
grandes obrigações, pelos benefícios feitos àquele que eu considerava meu filho, afirma que não é nada mais que um discípulo? Que
2
Note-se o emprego do termo luneta por Sarsi e do termo telescópio por Galileu.
O texto de Sarsi é redigido em latim: (. . . ) “quibus offensum se dicit Galilæus, addenda,
existimavimus, de homine bene potius nos hinc meritos, quam male, sperantes, dum tubum hunc,
quamvis non fœtum, alumnum certe ipsius, ab invidorum calumniis tueremur.”; enquanto o de
Galileu, em italiano.
4
Esse é o termo que Sarsi usa para se referir a Mário Guiducci.
3
609
“ADT-MF” — 2005/11/7 — 8:51 — page 610 — #610
610
O Ensaiador
retórica é a sua? Tinha antes acreditado que em tal ocasião tivesse
tentando apresentá-la como meu filho, quando estava bem certo de
que não era. Qual parte eu tenha no descobrimento deste instrumento, e se eu possa com razão chamá-lo produção minha já há
muito tempo o esclareci em meu Aviso Sidereo, escrevendo como
a Veneza, onde me encontrava naquele tempo, chegou a notícia de
que um holandês havia apresentado ao Sr. Conde Maurício 5 uma
luneta com a qual as coisas longínquas percebiam-se tão perfeitamente como se estivessem bem perto; nada mais foi acrescentado.
Voltando a Pádua, onde me havia estabelecido, comecei a raciocinar sobre este relato e na primeira noite depois de minha volta achei
uma solução. No dia seguinte fabriquei o instrumento e comuniquei
o acontecido em Veneza aos mesmos amigos com os quais no dia
anterior eu havia discutido sobre este problema. Dediquei-me logo à
construção de outro mais perfeito que seis dias depois levei para Veneza, onde, com grande admiração minha, foi observado por quase
todos os principais gentis-homens daquela república, por mais de
um mês em seguida, com grande aborrecimento meu. E, por conselho de um meu aficionado mecenas, apresentei-o ao Príncipe, em
pleno Colégio, de cuja estima e admiração são testemunhas as cartas ducais que ainda possuo e que mostram a grandiosidade daquele Príncipe Sereníssimo, confirmando-me para a vida inteira, em
recompensa da invenção apresentada, no cargo de leitor no Estudo
de Pádua, com ordenado duplicado em relação àquilo que eu recebia antes, que era já três vezes mais do que qualquer ordenado de
qualquer outro dos meus predecessores. Todos estes acontecimentos, sr. Sarsi, não se passaram num bosque ou num deserto, mas em
Veneza, onde, se o senhor tivesse permanecido, não teria me chamado de simples mentiroso. Por graça divina, vive ainda lá a maior
parte daqueles senhores, bem cientes de tudo, por meio dos quais o
senhor pode ser bem informado.
Pode ser que alguém afirmasse ser de bastante ajuda, para solucionar qualquer problema, ficar ciente antecipadamente da verdade
da conclusão e ficar certo de não estar procurando o impossível, e
que por isso o conhecimento e a certeza de que a luneta havia sido
construída foram-me de tanta ajuda que sem eles eu não teria talvez encontrado. Respondo a isto dizendo que a ajuda oferecida pelo
5
Maurício de Nassau.
“ADT-MF” — 2005/11/7 — 8:51 — page 611 — #611
O Ensaiador
conhecimento da existência do telescópio me impulsionou a pensar
sobre o assunto, porque pode ser que sem ele eu nunca tivesse pensado nisto; porém, que o conhecimento de sua existência possa ter
facilitado minha invenção, não acredito; e afirmo mais, que a solução
de um problema já marcado e conhecido é obra de raciocínio muito
maior do que daquele que é necessário para encontrar a solução de
um problema ainda não pensado nem conhecido, pois naquela hipótese pode haver influência do acaso em grande parte, mas nesta
última é obra do desenvolvimento lógico. E estamos certos de que o
holandês, primeiro inventor do telescópio, era um simples fabricante
de óculos comuns, que, casualmente manuseando vários tipos de
vidros, encontrou, ao olhar ao mesmo tempo através de dois deles,
um convexo e outro côncavo, colocados a distâncias diferentes do
olho, e desta forma verificou e observou o efeito derivado, e inventou
o óculo. Eu, porém, empolgado por este invento, encontrei a mesma
coisa, mas por continuidade lógica; e porque esta continuidade lógica é bastante fácil, quero explica-la a V. E. Ilustríssima para que,
relatando-a se for o caso, ela possa com a sua facilidade tornar mais
crédulos aqueles que, como Sarsi, querem privar-me daquele louvor,
qualquer que ele seja, que me pertence.
Meu raciocínio lógico foi então este: este óculo ou consta de um
único vidro ou mais de um; não pode se originar de um único vidro porque ou a sua figura resulta convexa, isto é, mais espessa
no meio do que na orla, ou resulta côncava, isto é, mais fina no
meio, ou resulta ser compreendida entre superfícies paralelas. Porém, esta última não altera em nada os objetos visíveis aumentandoos ou diminuindo-os; a côncava os diminui e a convexa os aumenta
suficientemente, mas os faz parecer indistintos e esfumaçados; portanto, um vidro só não pode produzir este efeito. Tomando-se então
dois vidros, e sabendo que o vidro de superfícies paralelas não alteram nada, como acabamos de dizer, concluímos que este efeito
não podia ser produzido pela junção de um destes com qualquer um
dos dois. Assim, restringi-me a experimentar aquilo que produzia a
composição dos outros dois, isto é, do convexo e do côncavo; percebi, assim, que solucionava meu problema. E o progresso relativo
ao meu invento foi tão grande que não me foi de ajuda conhecer
a verdade da conclusão. Porém, se Sarsi ou outros pensam que a
certeza da conclusão seja de grande ajuda para produzir um deter-
611
“ADT-MF” — 2005/11/7 — 8:51 — page 612 — #612
612
O Ensaiador
minado efeito, leiam eles as histórias onde encontrarão que Arquita
produziu uma pomba voadora, Arquimedes, um espelho que ardia
a enorme distância e outras maquinarias extraordinárias, que foram
acesas luzes perpetuas e cem outras conclusões estupendas. Raciocinando a respeito disto, poderão, sem muito esforço e com grande
honra e utilidade, encontrar o sistema de construção ou, se ao menos isto não se verificar, tirarão o benefício de esclarecer melhor que
a facilidade que eles se prometiam em conhecer antecipadamente a
verdade do efeito era muito menor do que aquilo que acreditavam.
Mas quero voltar (. . . )
“ADT-MF” — 2005/11/7 — 8:51 — page 613 — #613
Apêndice E
Referential inercial
Fragmentos de “Diálogo sobre os dois máximos sistemas
do mundo ptolomaico, e copernicano”
de Galileu Galilei ∗
Em alguns aspectos a questão primordial não é determinar um referencial inercial absoluto. Como a questão fundamental de uma teoria é sua aplicação em
situações que ocorrem na Natureza, explicando-as ou prevendo-as dentro de
erro experimental aceitável (ou não, quando a teoria é candidata a reformulação) para dadas circunstâncias, o problema passa a ser identificar um referencial que possa ser considerado inercial dentro desses erros experimentais, ou,
então, saber como “corrigir” a lei de movimento para aplicá-la em referenciais
não-inerciais.
Uma das leituras que se pode dar à primeira lei de Newton é que ela postula o referencial inercial, dá um critério para identificá-lo, definido escalas de
comprimento e de tempo (conjugadas) coerentes com o conjunto das leis de
movimento. Mas essas questões são sutis para um curso introdutório, assim
apenas as indicamos.
Completamos essas observações transcrevendo 1 um fragmento do Diálogo
sobre os dois máximos sistemas do mundo ptolomaico e copernicano (publicado em 1632 e proibido em 1633) de Galileu (1564–1642), esse é o penúltimo
livro de Galileu, o último é o Duas novas ciências (1638). Note-se a sofisticação do raciocínio por simetria:
∗
1
u e está remetido por rodapé à página 236.
Este Apêndice foi incluído por revisor ()
Da ótima tradução para o português [14] por Pablo R. Mariconda.
613
“ADT-MF” — 2005/11/7 — 8:51 — page 614 — #614
614
Diálogo – Galileu
(Diálogo, segunda jornada, “fala” de Salviati, ver [14, pág. 268 {213}] e [25,
pág. 153], com a seguinte nota em margem externa: Experiência suficiente para
mostrar a nulidade de todas as produzidas contra o movimento da Terra.)
Salviati . . . E aqui, como um último sinal da nulidade de todas as experiências apresentadas, parece-me que é o tempo e o lugar de mostrar
o modo de experimentá-la todas muito facilmente. Fechai-vos com
algum amigo no maior compartimento existente sob a coberta de
algum grande navio, e fazei que aí existam moscas, borboletas e
semelhantes animaizinhos voadores; seja também colocado aí um
grande recipiente com água, contendo pequenos peixes; suspendase ainda um balde, que gota a gota verse água em outro recipiente
de boca estreita, que esteja colocado por baixo: e, estando em repouso o navio, observai diligentemente como aqueles animaizinhos
voadores com igual velocidade vão para todas as partes do ambiente; ver-se-ão os peixes nadar indiferentemente para todos os lados; as gotas cadentes entrarem todas no vaso posto embaixo; e
vós, lançando alguma coisa para o amigo, não a deveis lançar com
mais força para esta que para aquela parte, quando as distâncias sejam iguais; e saltando, como se diz, com os pés juntos, transporíeis
espaços iguais para todas as partes. Assegurai-vos de ter diligentemente todas essas coisas, ainda que não exista dúvida alguma
de que enquanto o navio esteja parado as coisas devem acontecer
assim, e fazei mover o navio com quanta velocidade desejardes; porque (sempre que o movimento seja uniforme e não flutuante de cá
para lá) não reconhecereis uma mínima mudança em todos os mencionados efeitos, nem de nenhum deles podereis compreender se
o navio caminha ou está parado: saltando, percorreríeis no tablado
os mesmos espaços que antes, nem daríeis saltos maiores para a
popa que para a proa, porque o navio se move velocissimamente,
ainda que, no tempo durante o qual estejais no ar, o tablado subjacente deslize para a parte contrária ao vosso salto; e jogando alguma
coisa ao companheiro, não será necessário atirá-la com mais força
para alcançá-lo, se ele estiver para a proa e vós para a popa, que
se estivésseis colocados ao contrário; e as gotas continuarão a cair
como antes no recipiente inferior, sem que nenhuma caia em direção à popa, ainda que, enquanto a gota está no ar, o navio navegue
muitos palmos; os peixes na sua água nadarão sem maior esforço
tanto para parte precedente quanto para a parte subseqüente do
“ADT-MF” — 2005/11/7 — 8:51 — page 615 — #615
615
vaso, e com a mesma facilidade chegarão ao alinhamento colocado
em qualquer lugar da borda do recipiente; e finalmente as borboletas
e as moscas continuarão seus vôos indiferentemente para todas as
partes, e nunca acontecerá que se concentrem na parte endereçada
para a popa, como se estivessem cansadas de acompanhar o curso
veloz do navio, do qual seriam separadas, por manterem-se no ar
por longo tempo; e se queimando alguma lágrima de incenso produzísseis um pouco de fumaça, veríeis que ele se eleva para o alto e
como uma pequena nuvem aí se mantém, movendo-se indiferentemente não mais para esta que para aquela parte. (. . . )
“ADT-MF” — 2005/11/7 — 8:51 — page 616 — #616
616
“ADT-MF” — 2005/11/7 — 8:51 — page 617 — #617
617
Prefixos SI
Fator
1024
1021
1018
1015
1012
109
106
103
102
101
Nome
yotta
zetta
exa
peta
tera
giga
mega
quilo
hecto
deca
Símbolo
Y
Z
E
P
T
G
M
k
h
da
Fator
10−1
10−2
10−3
10−6
10−9
10−12
10−15
10−18
10−21
10−24
Nome
deci
centi
mili
micro
nano
pico
femto
atto
zepto
yocto
Símbolo
d
c
m
µ
n
p
f
a
z
y
Tabela E.1: A fonte dos símbolos é o documento oficial do SI (BIPM–1998; NIST–
2001). A fonte da ortografia em português é o INMETRO (Portaria no 002, de 06 de
janeiro de 1993).
“ADT-MF” — 2005/11/7 — 8:51 — page 618 — #618
618
“ADT-MF” — 2005/11/7 — 8:51 — page 619 — #619
Suplementos
619
“ADT-MF” — 2005/11/7 — 8:51 — page 620 — #620
“ADT-MF” — 2005/11/7 — 8:51 — page 621 — #621
Sobre a revisão, editoração e
contribuições
O texto aqui apresentado é transcrição de Física (sumários), Fascículos 0 a 6,
além de um texto datilografado que corresponderia ao Fascículo 7 e de parte
do texto datilografado correspondente ao curso de Acústica de autoria do Prof.
Armando Dias Tavares, em que procedemos uma revisão e adaptação para formato de livro moderno.
Para não distorcer a intenção do Prof. Armando, procuramos identificar a
contribuição ao texto original, com o intuito de possibilitar novas edições e
estimular contribuições autorais.
Sobre as contribuições
Contribuíram para esta revisão (em ordem alfabética):
j –
u –
n –
v –
2
Joaquim Pereira Neto
José Umberto Cinelli Lobo de Oliveira
Nilson Duarte Dória
Vitor Oguri
2
x identifica as contribuições acrescentadas ao
u A letra no interior do círculo, p. ex., ,
texto original. Longe de exibição dos revisores, optamos por identificar as intervenções mais
contundentes no texto original para não o descaracterizar. Mesmo não sendo uma cópia “dos
fascículos”, procuramos manter a integridade básica das idéias e do projeto do Prof. Armando.
621
“ADT-MF” — 2005/11/7 — 8:51 — page 622 — #622
622
Sobre a revisão, editoração e contribuições
Sobre a editoração
Este texto foi processado em LATEX 2ε [31], usando o pacote 3 MiKTEX para
windows (o Linux já contém nativamente o TEX), há pacotes de TEX para cada
sistema operacional, visite o TUG, TEXUsersGrup, a página oficial do TEX.
3
u Esse é um ótimo pacote do TEX [31] e que pode ser obtido gratuita e diretamente por
meio da internet [21].
“ADT-MF” — 2005/11/7 — 8:51 — page 623 — #623
Lista de Figuras
1.1 Uma fonte de inspiração . . . . . . . . . .
1.2 Esquema para a deflexão da haste . . . . .
1.3 Eixo associado a uma reta . . . . . . . . .
1.4 Eixos cartesianos . . . . . . . . . . . . . .
1.5 Gráfico da lei associada a medidas tabeladas
1.6 Função linear e função afim . . . . . . . .
1.7 Deflexão de várias hastes . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
36
38
46
48
51
52
55
2.1 Gráfico da lei relacionando peso e deflexão . . . . . . . .
2.2 Gráfico da lei relacionando peso e deflexão e as incertezas
2.3 Erro de paralaxe . . . . . . . . . . . . . . . . . . . . . .
2.4 Ilustrações de dinamômetros . . . . . . . . . . . . . . . .
2.5 Dispositivo para calibração dos dinamômetros de precisão
2.6 Aplicação da força F~ no ponto P . . . . . . . . . . . . . .
2.7 Representação de uma força por segmento de reta orientado
2.8 Montagem da terceira experiência . . . . . . . . . . . . .
2.9 Quarta experiência . . . . . . . . . . . . . . . . . . . . .
2.10 Medida de intensidade de força . . . . . . . . . . . . . .
2.11 Indicação das forças atuando no ponto P . . . . . . . . .
2.12 Montagem para medidas de ângulos . . . . . . . . . . .
2.13 Forças e suas orientações . . . . . . . . . . . . . . . . .
2.14 Medição das coordenadas de um ponto . . . . . . . . . .
2.15 Regra do paralelogramo, determinação gráfica . . . . . .
2.16 Determinação gráfica da resultante . . . . . . . . . . . .
2.17 Método trigonométrico . . . . . . . . . . . . . . . . . .
2.18 Método trigonométrico, outro exemplo . . . . . . . . . .
2.19 Decomposição de força . . . . . . . . . . . . . . . . . .
2.20 Decomposição de força, direções ortogonais . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
67
68
73
81
82
85
86
87
89
91
91
92
93
94
95
96
96
98
99
99
623
.
.
.
.
.
.
.
.
.
. .
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
“ADT-MF” — 2005/11/7 — 8:51 — page 624 — #624
624
Lista de Figuras
2.21 Método analítico para a regra do paralelogramo
2.22 Regra do triângulo . . . . . . . . . . . . . . . .
2.23 Decomposição de força . . . . . . . . . . . . .
2.24 Alturas para a área do triângulo . . . . . . . . .
2.25 Primeira montagem para problema . . . . . . .
2.26 Segunda montagem do problema . . . . . . . .
2.27 Montagem do problema . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
101
103
104
104
108
108
109
3.1 Cinco forças aplicadas em um ponto . . . . . . . . .
3.2 Composição de forças por pares . . . . . . . . . . .
3.3 Composição de forças pelo fechamento da poligonal
3.4 Método trigonométrico . . . . . . . . . . . . . . . .
3.5 Convenções para orientação de ângulos . . . . . . .
3.6 Forças aplicadas nos quadrantes . . . . . . . . . . .
3.7 Forças coplanares aplicadas no ponto (a, b) . . . . .
3.8 Composição de forças . . . . . . . . . . . . . . . .
3.9 Composição de rotações . . . . . . . . . . . . . . .
3.10 Terceira lei de Newton . . . . . . . . . . . . . . .
3.11 Terceira lei de Newton, exemplo . . . . . . . . . .
3.12 Composição de duas forças e o limite para θ → 0 . .
3.13 Multiplicação de força por um número real . . . . .
3.14 Ilustração para problema . . . . . . . . . . . . . .
3.15 Simetrias para rotações de um triângulo equilátero .
3.16 Convenção para rotação positiva . . . . . . . . . .
3.17 Dispositivo para um problema . . . . . . . . . . .
3.18 Forças correspondentes a um dispositivo . . . . . .
3.19 Forças que atuam no ponto C . . . . . . . . . . . .
3.20 Forças que atuam no ponto C . . . . . . . . . . . .
3.21 Sistema de coordenadas para o método analítico . .
3.22 Dispositivo para um problema . . . . . . . . . . .
3.23 Dispositivo para um problema experimental . . . .
3.24 Diagrama para um problema . . . . . . . . . . . .
3.25 Ilustração para um exercício . . . . . . . . . . . .
3.26 Ilustração para exercício . . . . . . . . . . . . . .
3.27 Regra da mão direita . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
112
113
113
115
116
116
117
117
120
122
123
125
127
129
137
139
142
142
143
144
146
148
148
149
150
151
154
4.1 Corpo rígido em não-equilíbrio sujeito a força resultante nula
4.2 Exemplo de sistema nulo de forças . . . . . . . . . . . . . .
4.3 Ilustração para vetor deslizante . . . . . . . . . . . . . . . .
4.4 Corpo rígido sujeito a forças concorrentes em um ponto . .
4.5 Corpo rígido sujeito a forças paralelas . . . . . . . . . . . .
4.6 Corpo rígido sujeito a forças paralelas de sentidos contrários
4.7 Corpo rígido sujeito a um binário . . . . . . . . . . . . . .
4.8 Do Probl. 4.13 . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
159
161
162
163
163
165
167
168
“ADT-MF” — 2005/11/7 — 8:51 — page 625 — #625
625
Lista de Figuras
4.9 Do Probl. 4.14 . . . . . . . . . . . . . . . . . . . . . . . .
4.10 Do Probl. 4.17 . . . . . . . . . . . . . . . . . . . . . . . .
4.11 Do Probl. 4.18 . . . . . . . . . . . . . . . . . . . . . . . .
4.12 Do Probl. 4.18 . . . . . . . . . . . . . . . . . . . . . . . .
4.13 Força aplicada para girar um portão . . . . . . . . . . . .
4.14 Força aplicada para girar um portão? . . . . . . . . . . . .
4.15 Força aplicada para girar um portão? . . . . . . . . . . . .
~ do eixo z e do plano π . . . . . .
4.16 Vista espacial da força F,
4.17 Vista do plano π da projeção F~ 0 da força F~ . . . . . . . . .
4.18 Esquema para montagem de experiência . . . . . . . . . .
4.19 Ponteiro em equilíbrio sujeito a três forças . . . . . . . . .
4.20 Ponteiro em equilíbrio sujeito a quatro forças . . . . . . .
4.21 Montagem de experiência . . . . . . . . . . . . . . . . . .
4.22 Montagem de experiência . . . . . . . . . . . . . . . . . .
4.23 Teorema de Varignon . . . . . . . . . . . . . . . . . . . .
4.24 Outra forma de definir momento de força . . . . . . . . . .
4.25 Vetor normal emergindo de um plano . . . . . . . . . . . .
4.26 Vetor normal imergindo em um plano . . . . . . . . . . .
4.27 Composição dos deslocamentos representados . . . . . . .
4.28 O pólo, a força, o vetor posição da força . . . . . . . . . .
4.29 Forças paralelas aplicadas em um corpo rígido . . . . . . .
4.30 Forças paralelas consideradas como vetores deslizantes . .
4.31 Forças paralelas . . . . . . . . . . . . . . . . . . . . . . .
4.32 Forças paralelas . . . . . . . . . . . . . . . . . . . . . . .
4.33 Forças paralelas, outro exemplo . . . . . . . . . . . . . . .
~ no sistema triortogonal xyz
4.34 Projeções ortogonais do vetor A
~ no sistema triortogonal xyz
4.35 Projeções ortogonais do vetor A
4.36 Momento de uma força genérica no espaço . . . . . . . . .
4.37 Ilustração para exercício . . . . . . . . . . . . . . . . . .
4.38 solução gráfica . . . . . . . . . . . . . . . . . . . . . . .
4.39 A resultante e seu ponto de aplicação . . . . . . . . . . . .
4.40 Forças aplicadas em uma barra articulada . . . . . . . . .
4.41 Forças aplicadas em uma barra retilínea . . . . . . . . . .
4.42 Ilustração correspondente ao Probl. 4.22 (item 2) . . . . .
4.43 Ilustração correspondente ao Probl. 4.22 (item 3) . . . . .
4.44 Placa retangular com pesos distribuídos . . . . . . . . . .
4.45 Placa retangular horizontal, visão espacial . . . . . . . . .
4.46 Dispositivo do Probl. 4.23 . . . . . . . . . . . . . . . . . .
4.47 Dispositivo do Probl. 4.24 . . . . . . . . . . . . . . . . . .
4.48 Forças peso distribuídas espacialmente . . . . . . . . . . .
4.49 Dispositivo do Probl. 4.26 . . . . . . . . . . . . . . . . . .
4.50 Dispositivo do Probl. 4.27 . . . . . . . . . . . . . . . . . .
4.51 Para o Probl. 4.28 . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
169
169
170
170
171
172
172
173
173
175
175
176
178
178
178
179
181
181
181
182
183
184
185
187
188
190
191
194
196
197
201
202
203
204
204
205
205
206
206
206
207
207
208
“ADT-MF” — 2005/11/7 — 8:51 — page 626 — #626
626
Lista de Figuras
4.52 Para o Probl. 4.29 . . . . . . . . . . . . . . . . . . . . . . .
4.53 Para o Probl. 4.30 . . . . . . . . . . . . . . . . . . . . . . .
4.54 Representação gráfica, Probl. 4.33 . . . . . . . . . . . . . .
4.55 Ilustração para o centro de gravidade de uma haste fina . . .
4.56 Binário atuando sobre um corpo rígido . . . . . . . . . . . .
4.57 Duas forças paralelas e de sentidos contrários . . . . . . . .
4.58 Dispositivo do Probl. 4.34 . . . . . . . . . . . . . . . . . . .
4.59 Dispositivo do Probl. 4.35 . . . . . . . . . . . . . . . . . . .
4.60 Estruturas para o Probl. 4.36 . . . . . . . . . . . . . . . . .
4.61 Partes da balança . . . . . . . . . . . . . . . . . . . . . . .
4.62 Partes da balança . . . . . . . . . . . . . . . . . . . . . . .
4.63 Partes da balança . . . . . . . . . . . . . . . . . . . . . . .
4.64 Partes da balança . . . . . . . . . . . . . . . . . . . . . . .
4.65 Partes da balança . . . . . . . . . . . . . . . . . . . . . . .
4.66 Partes da balança . . . . . . . . . . . . . . . . . . . . . . .
4.67 Corpo em repouso sobre uma mesa . . . . . . . . . . . . . .
4.68 Corpo em repouso sobre uma mesa sujeito a força horizontal
4.69 Correspondente à segunda experiência sobre atrito . . . . . .
4.70 Correspondente à terceira experiência sobre atrito . . . . . .
4.71 Correspondente à terceira experiência sobre atrito . . . . . .
4.72 Correspondente ao Probl. 4.47 . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
208
208
209
211
216
217
219
219
219
221
221
223
223
224
224
225
225
228
228
228
229
5.1 Periélio de Mercúrio . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
5.2 Sistemas de coordenadas associados a dois sistemas inerciais . . . . . . 240
6.1 Localização do ponto P pelas coordenadas (x, y) . . . . .
−−→
6.2 Localização do ponto P pelo vetor posição ~r = OP . . . . .
6.3 O vetor posição ~r como combinação linear de ~a e de ~b . .
−−→
6.4 Localização de P pelo vetor posição ~r = OP . . . . . . . .
6.5 Vetor posição ~r = xı̂ + y ̂ do ponto P de coordenadas (x, y)
6.6 Movimento do ponto P sobre a curva s . . . . . . . . . .
6.7 Movimento do ponto P sobre a curva s . . . . . . . . . .
6.8 Vetores posição do ponto P na curva b nos instantes t1 e t2
6.9 Ponto P em movimento retilíneo . . . . . . . . . . . . . .
6.10 Movimento do ponto P sobre a curva s . . . . . . . . . .
6.11 Movimento do ponto P sobre a curva s . . . . . . . . . .
6.12 Movimento de P numa seqüência de segmentos de retas .
6.13 Movimento do ponto P no plano Oxy . . . . . . . . . . .
6.14 Detalhe do movimento do ponto P . . . . . . . . . . . .
6.15 Deslocamentos em intervalos de tempo decrescentes . . .
6.16 A velocidade ~v em t = t0 e o versor τ̂ no ponto ~r0 =~r(t0 ) .
6.17 Representação geométrica da velocidade instantânea . .
6.18 Espaço percorrido em movimentos retilíneos . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
250
250
250
251
252
252
253
254
254
256
259
262
264
265
267
270
271
272
“ADT-MF” — 2005/11/7 — 8:51 — page 627 — #627
627
Lista de Figuras
6.19 Espaço percorrido sobre linha poligonal aberta . . . . . . . . .
6.20 Análise cinemática do movimento geral do ponto P . . . . . .
6.21 Gráfico para o Probl. 6.1 . . . . . . . . . . . . . . . . . . . .
6.22 Gráfico para o Probl. 6.2 . . . . . . . . . . . . . . . . . . . .
6.23 Gráfico para o Probl. 6.3 . . . . . . . . . . . . . . . . . . . .
6.24 Sucessão de movimentos retilíneos não-colineares . . . . . . .
6.25 Representação gráfica do Probl. 6.5 . . . . . . . . . . . . . . .
6.26 Representação gráfica correspondente a equações paramétricas
6.27 Movimento parabólico . . . . . . . . . . . . . . . . . . . . .
6.28 Movimento parabólico . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
273
275
279
281
282
284
287
288
291
293
7.1 Ilustração para o vetor ∆~v =~v2 −~v1 . . . .
7.2 Decomposição do vetor ∆~v . . . . . . . .
7.3 Decomposição do vetor ∆~v . . . . . . . .
7.4 Geometria para a aceleração normal . . .
7.5 Geometria do círculo . . . . . . . . . . .
7.6 Geometria das normais e das tangentes .
7.7 Ilustração para a velocidade angular média
7.8 Componentes normal e tangencial . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
297
299
300
301
303
304
305
306
8.1 Ponto de inflexão . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2 Módulo da velocidade em função do tempo . . . . . . . . . . . . . . .
8.3 Módulo da velocidade em função do tempo – mru . . . . . . . . . . . .
8.4 Módulo da aceleração em função do tempo – (mrua) . . . . . . . . . .
8.5 Módulo da velocidade em função do tempo – mru . . . . . . . . . . . .
8.6 Posição de uma partícula em alguns instantes . . . . . . . . . . . . . .
8.7 Velocidade de uma partícula para t ∈ (0 s,4 s) . . . . . . . . . . . . . .
8.8 Módulo da velocidade de uma partícula para t ∈ (0 s,4 s) . . . . . . . .
8.9 Para definição da velocidade
angular . . . . . . . . . . . . . . . . . . .
,→
8.10 Representação de ∆θ . . . . . . . . . . . . . . . . . . . . . . . . . .
8.11 Componentes da velocidade angular . . . . . . . . . . . . . . . . . .
8.12 Movimento circular sobre o plano xy . . . . . . . . . . . . . . . . . .
8.13 O0 como origem do vetor posição ~r . . . . . . . . . . . . . . . . . . .
8.14 Segmento de reta onde se apóia ~r(t) = A sen(ωt) ̂ . . . . . . . . . . . .
8.15 Ponto Q executando um movimento circular uniforme, sobre circulo
de raio A e com velocidade angular ω . . . . . . . . . . . . . . . . .
8.16 Levantamento do gráfico da função y = A sen(ωt) . . . . . . . . . . . .
8.17 Levantamento do gráfico da velocidade v = ωA cos(ωt) . . . . . . . . .
8.18 Ilustração comparativa entre os gráficos da posição e da velocidade de
um MHS de amplitude A e período T = 2π
ω . . . . . . . . . . . . . . .
8.19 Gráficos das funções v = ωA cos(ωt) e |v| . . . . . . . . . . . . . . . .
8.20 Sistema de referência S Oxy e S O0 0 ξη . . . . . . . . . . . . . . . . . . .
8.21 Sistema de referência S O0 0 ξη com velocidade de translação ~v0 e movimento de rotação em torno de O0 . . . . . . . . . . . . . . . . . . . .
313
314
315
316
317
319
320
320
322
325
326
327
327
329
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
331
332
333
334
336
337
340
“ADT-MF” — 2005/11/7 — 8:51 — page 628 — #628
628
Lista de Figuras
8.22 Trem movendo-se com velocidade ~v em relação ao sistema de referência S Oxy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.23 Ilustração para a derivada temporal de ı̂ξ . . . . . . . . . . . . . . . .
8.24 Ilustração para a derivada temporal de ̂η . . . . . . . . . . . . . . . .
8.25 Trem com velocidade ~vo em relação a terra e um homem deslocando-se
com velocidade de ~v em relação ao trem . . . . . . . . . . . . . . . .
8.26 Plataforma circular de raio R girando com velocidade angular ω . . .
8.27 Plataforma circular de raio R girando com velocidade angular ω . . .
8.28 Homem caminha tangencialmente a um circulo com velocidade de módulo constante . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.29 Homem corre em movimento circular . . . . . . . . . . . . . . . . .
8.30 Movimento de equações paramétricas x = 3,0t e y = 8,0t − 0,8t2 . . . .
8.31 Movimento de equações paramétricas
x = R cos(ωt) e y = R sen(ωt) . . . . . . . . . . . . . . . . . . . . . .
8.32 O 0 é o centro de curvatura para t = 3 s . . . . . . . . . . . . . . . . . .
8.33 Homem correndo radialmente sobre plataforma girante . . . . . . . .
341
342
343
346
347
348
350
351
356
358
359
360
9.1 Ilustração para a 2a Lei de Newton . . . . . . . . . . . . . . . . . . . .
9.2 Atração gravitacional . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3 Forças de repulsão e de atração . . . . . . . . . . . . . . . . . . . . .
9.4 Geometria de um pêndulo terrestre . . . . . . . . . . . . . . . . . . . .
9.5 Sistema não-inercial . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.6 Balança de Eötvös . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.7 Máquina de Atwood montada com o Estojo de Mecânica – UERJ; situação inicial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.8 Máquina de Atwood; situação em que o fio de peso ~p fica retido no anel
9.9 Máquina de Atwood; situação final para as medições . . . . . . . . . .
9.10 Balanceamento da roldana da Máquina de Atwood . . . . . . . . . .
9.11 Ilustração para o problema 9.12 . . . . . . . . . . . . . . . . . . . . .
9.12 Lançamento de um projétil . . . . . . . . . . . . . . . . . . . . . . .
9.13 Sistema de coordenadas Oxy para o movimento de um projétil . . . .
362
365
367
368
371
372
10.1 Centro de massa de três partículas . . . . . . . . . . . . .
10.2 Centro de massa de distribuição contínua de massa . . . .
10.3 Elemento de massa em uma barra homogênea . . . . . . .
10.4 Placa retangular ao sofrer a ação instantânea da força F~ . .
10.5 Haste em equilíbrio horizontal sofrendo a força do taco . .
10.6 Haste suspensa na horizontal por fio vertical passando pelo
massa . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.7 Taco atingindo o ressalto na haste . . . . . . . . . . . . .
10.8 Ilustrações aos Probl. 10.7 e Probl. 10.8 . . . . . . . . . .
10.9 Diagrama solução do Probl. 10.12 . . . . . . . . . . . . .
10.10 Ilustração para o Probl. 10.14 . . . . . . . . . . . . . . .
10.11 Ilustração para o Probl. 10.15 . . . . . . . . . . . . . . .
400
404
407
410
411
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
centro de
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
390
391
392
393
395
396
397
412
412
413
415
415
415
“ADT-MF” — 2005/11/7 — 8:51 — page 629 — #629
629
Lista de Figuras
10.12 Diagrama para o Probl. 10.16 . . . .
10.13 Diagrama para o Probl. 10.17 . . . .
10.14 Diagrama para o Probl. 10.18 . . . .
10.15 Chapa de ferro do Probl. 10.19 . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
416
416
418
419
11.1 Diagramas para montagem da mesa giratória . . . . . . . . . . . . . . 423
12.1 Curva suporte do movimento . . . . . . . . . . . . . . . . . . . . . .
12.2 Termos adotados para o MHS . . . . . . . . . . . . . . . . . . . . . .
12.3 Corpo suspenso por uma mola . . . . . . . . . . . . . . . . . . . . .
12.4 Curva de calibração . . . . . . . . . . . . . . . . . . . . . . . . . . .
12.5 Corpo suspenso por uma mola . . . . . . . . . . . . . . . . . . . . .
12.6 Massas rigidamente ligadas entre si e ao eixo Oz . . . . . . . . . . . .
12.7 Massas rigidamente ligadas girando em torno de um eixo . . . . . . .
12.8 Destaque do elemento de massa dm . . . . . . . . . . . . . . . . . . .
12.9 Ilustração para o Teorema de Steiner–Huygens . . . . . . . . . . . . .
12.10 Ilustração para o Teorema de Steiner–Huygens . . . . . . . . . . . .
12.11 Ilustração para o Teorema de Steiner–Huygens . . . . . . . . . . . .
12.12 Haste homogênea de comprimento L . . . . . . . . . . . . . . . . .
12.13 Corpo rígido suspenso do eixo Z . . . . . . . . . . . . . . . . . . .
12.14 Haste rígida que oscila em torno de um eixo horizontal . . . . . . . .
12.15 Haste rígida com esfera . . . . . . . . . . . . . . . . . . . . . . . .
12.16 Haste rígida com esfera, outra vista . . . . . . . . . . . . . . . . . .
12.17 Haste com esfera na extremidade oscilando em torno de eixo horizontal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12.18 Pêndulo simples de comprimento ` e massa m . . . . . . . . . . . .
12.19 Haste rígida oscilando em torno do eixo Z horizontal . . . . . . . . .
12.20 Geometria do pêndulo simples da experiência . . . . . . . . . . . .
12.21 Vista do pêndulo simples da experiência para determinação de g . . .
12.22 Gráfico de p versus T 2 . . . . . . . . . . . . . . . . . . . . . . . . .
12.23 Sistema de coordenadas paralelos . . . . . . . . . . . . . . . . . . .
12.24 Retas de Regressão entre as variáveis x e y e entre as variáveis y e x .
12.25 Esfera que rola por um plano inclinado em queda livre . . . . . . . .
12.26 Esquema para montagem de dispositivo experimental . . . . . . . .
12.27 Esquema para montagem de dispositivo experimental . . . . . . . .
12.28 Esquema para montagem de dispositivo experimental . . . . . . . .
12.29 Esquema para montagem de dispositivo experimental . . . . . . . .
426
428
432
433
433
435
436
438
439
440
441
443
445
446
449
449
13.1 Forças aplicadas em um corpo C0 . . . . . . . . . . . .
13.2 Força aplicada em uma barra . . . . . . . . . . . . . .
13.3 Gráfico do esforço específico em função da deformação
13.4 Ilustração de cisalhamento . . . . . . . . . . . . . . . .
13.5 Ilustração de cisalhamento . . . . . . . . . . . . . . . .
13.6 Ilustração de torção . . . . . . . . . . . . . . . . . . .
487
489
489
490
492
492
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
452
453
453
456
458
459
471
475
480
481
481
482
483
“ADT-MF” — 2005/11/7 — 8:51 — page 630 — #630
630
Lista de Figuras
13.7 Ilustração de torção . . . . . . . . . . . . . . . . . . . . . . . . . . . 493
14.1 Oscilador por torção . . . . . . . . . . . . . . . . . . . . . . . . . . .
14.2 Dispositivo para medições . . . . . . . . . . . . . . . . . . . . . . . .
14.3 Fio de aço inox sustentando uma pinça. . . . . . . . . . . . . . . . . .
14.4 Fio de aço inox preso sustentando carga zero. . . . . . . . . . . . . . .
14.5 Ponto M em movimento circular observado do ponto P1 . . . . . . . .
14.6 Projeção ortogonal M 0 do ponto M em movimento circular. . . . . . .
14.7 Circulo de referência à esquerda, função y = A sen(ωt−ϕ) à direita. . .
14.8 Circulo de referência correspondente a função y = A sen(ωt+ϕ). . . . .
14.9 Composição dos movimentos y1 = A sen(ωt) e y2 = B sen(ωt−ϕ). . . . .
14.10 A linha contínua corresponde à superposição dos movimentos 1 e 2
com diferença de fase ϕ. . . . . . . . . . . . . . . . . . . . . . . . .
14.11 Superposição de três osciladores harmônicos simples. . . . . . . . .
14.12 Superposição de MHS de mesma amplitude, mesma freqüência e diferenças de fase constante. . . . . . . . . . . . . . . . . . . . . . . .
14.13 Geometria da composição de dois MHS de mesma freqüência, mesma
amplitude e mesma diferença de fase. . . . . . . . . . . . . . . . . .
14.14 Superposição de MHS de mesma amplitude, mesma freqüência e diferenças de fase constante. . . . . . . . . . . . . . . . . . . . . . . .
14.15 Superposição de dois MHS de freqüências próximas. . . . . . . . . .
14.16 Superposição de dois MHS de freqüências comensuráveis. . . . . . .
14.17 Superposição de dois movimentos harmônicos ortogonais. . . . . . .
14.18 Caso geral. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14.19 ϕ = π2 ou 3π
2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14.20 ϕ = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14.21 ϕ = π. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14.22 A = B, ϕ = π2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14.23 Quadros da evolução da superposição de dois MHS de freqüências
quase iguais. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14.24 Diagrama para a composição de dois MHS ortogonais. . . . . . . . .
14.25 Composição de MHS ortogonais de freqüências comensuráveis. . . .
14.26 Figuras de Lissajous. . . . . . . . . . . . . . . . . . . . . . . . . . .
14.27 Figuras de Lissajous. . . . . . . . . . . . . . . . . . . . . . . . . . .
14.28 Dispositivo para composição de MHS ortogonais. . . . . . . . . . .
495
497
499
499
501
502
503
503
506
506
507
508
509
510
513
514
515
517
517
517
517
517
519
521
523
523
524
525
15.1 Energia no MHS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 530
16.1 Corpo em movimento harmônico amortecido. . . .
16.2 Movimento harmônico superamortecido. . . . . . .
16.3 Movimento harmônico criticamente amortecido. . .
16.4 Movimento harmônico subamortecido. . . . . . . .
16.5 Diagrama para as condições iniciais do movimento
mortecido. . . . . . . . . . . . . . . . . . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
harmônico
. . . . . .
. . . .
. . . .
. . . .
. . . .
suba. . . .
534
536
538
539
541
“ADT-MF” — 2005/11/7 — 8:51 — page 631 — #631
631
Lista de Figuras
16.6 Montagem com o prato na vertical. . . . . . . . . . . . . . . . . . . .
16.7 Montagem com o prato na horizontal. . . . . . . . . . . . . . . . . .
16.8 Dispositivo para movimento harmônico subamortecido. . . . . . . . .
16.9 Forças no oscilador harmônico forçado. . . . . . . . . . . . . . . . .
16.10 solução particular do oscilador harmônico forçado por F = F0 sen(ωt).
16.11 Circuito elétrico RLC. . . . . . . . . . . . . . . . . . . . . . . . . .
16.12 Dois pêndulos idênticos acoplados pelo fio CD. . . . . . . . . . . .
16.13 Montagem dos pêndulos acoplados de massas diferentes. . . . . . .
16.14 Amplitude da massa mA em função da razão das freqüências e para
vários fatores de amortecimento. . . . . . . . . . . . . . . . . . . . .
16.15 Osciladores acoplados apresentando batimento . . . . . . . . . . . .
16.16 Acoplamento de um oscilador horizontal e outro vertical. . . . . . .
16.17 Composição de oscilação vertical e horizontal. . . . . . . . . . . . .
541
541
550
551
554
555
556
558
17.1 Excitação da corda e sua propagação. . . . . . . . . . . . . . . . . . .
17.2 Onda a = f (x − vt) a se propagar com velocidade v. . . . . . . . . . .
17.3 Situação em dado instante, destacando a derivada tal que tan α = ∂a/∂x.
17.4 Trem de ondas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17.5 Trem de ondas senoidais. . . . . . . . . . . . . . . . . . . . . . . . .
17.6 Situação de uma onda transversal no instante t. . . . . . . . . . . . .
17.7 Onda transversal (A) e a onda refletida (B). . . . . . . . . . . . . . .
17.8 Propagação de uma onda gerada no ponto médio P da corda. . . . . .
17.9 Modos de vibração da corda L = j λ/2. . . . . . . . . . . . . . . . . .
17.10 Esquema do dispositivo do exercício 17.7. . . . . . . . . . . . . . .
565
566
568
570
571
573
575
577
579
581
559
560
561
562
“ADT-MF” — 2005/11/7 — 8:51 — page 632 — #632
632
“ADT-MF” — 2005/11/7 — 8:51 — page 633 — #633
Lista de Tabelas
1.1 Interdependência entre peso e deflexão
. . . . . . . . . . . . . . . . .
45
2.1 Interdependência entre peso e deflexão da haste . . . . . . . . . . . . .
2.2 A deflexão e seus desvios . . . . . . . . . . . . . . . . . . . . . . . .
66
76
3.1 Tabuadas para o corpo associado ao conjunto {0, 1}
3.2 Tabuadas . . . . . . . . . . . . . . . . . . . . . .
3.3 Tabuadas . . . . . . . . . . . . . . . . . . . . . .
3.4 Valores de um exercício . . . . . . . . . . . . . .
4.1 Verificação dos momentos de força
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
133
135
136
150
. . . . . . . . . . . . . . . . . . . 177
8.1 Velocidades e deslocamentos em dado movimento . . . . . . . . . . . 319
8.2 Resumo dos dados . . . . . . . . . . . . . . . . . . . . . . . . . . . . 356
9.1 Prefixos SI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 380
9.2 Aceleração da gravidade em alguns corpos celestes do Sistema Solar . 395
12.1 Sinais do seno e do cosseno . . . . . . . . . . . . . . . . . . . . . . .
12.2 Períodos de pêndulo simples de comprimentos distintos . . . . . . . .
2
`)
12.3 Valores de g calculados por g = (4π
, g` e as médias correspondentes
(T 2 )
2
12.4 Valores de yi , xi , xi yi , xi e as respectivas médias . . . . . . . . . . . .
12.5 Valores corrigidos dos pêndulos . . . . . . . . . . . . . . . . . . . .
12.6 Valores para cálculo das retas de regressão e do coeficiente de correlação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
429
458
460
466
467
477
14.1 Constantes elásticas de alguns sólidos . . . . . . . . . . . . . . . . . . 499
E.1 Prefixos SI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 617
633
“ADT-MF” — 2005/11/7 — 8:51 — page 634 — #634
634
Lista de Tabelas
“ADT-MF” — 2005/11/7 — 8:51 — page 635 — #635
Referências
[1] Bragisnkii V. B. and Panov V. I., Soviet Physics – JETP 34 (1972), 463.
[2] BIPM/IEC/IFCC/ISO/IUPAC/IUPAP/OIML, Vocabulário internacional
de termos fundamentais e gerais de metrologia — VIM, 2a ed., Versão
Brasileira4 — INMETRO, Brasília, 2000, Disponível em
www.inmetro.gov.br/infotec/vim.asp.
[3] BIPM/INMETRO, Sistema Internacional de unidades, 8 ed.,
INMETRO, Rio de Janeiro, 2003, Si.pdf.
[4] B. J. Caraça, Conceitos fundamentais da matemática, 9a ed., Livraria Sá
da Costa Editora, Lisboa, 1989.
[5] B. Castrucci, Elementos de teoria dos conjuntos, Livraria Nobel, SP,
1970.
[6] Aurélio Buarque de Holanda Ferreira, Dicionário Aurélio eletrônico,
Editora Nova Fronteira, Rio de Janeiro, 1999.
[7] J. U. C. L. de Oliveira, Tópicos breves de matemática, «trabalho em
revisão final; versão atualizada disponível no endereço
www.dft.if.uerj.br/umberto», 2001.
[8] R. P. Feynman, O que é uma lei física, Gradiva, Lisboa, 1989.
[9] R. A. Fisher, The Design of Experiments, 7th ed., Oliver and Boyd,
Edinburg, 1960.
4
Tradução do International Vocabulary of Basic and General Terms in Metrology – ISO,
second edition 1993; documento conecido como VIM.
635
“ADT-MF” — 2005/11/7 — 8:51 — page 636 — #636
636
Referências
[10] A. Fonseca, Curso de mecânica, dinâmica, vol. III, Ao Livro Técnico,
Rio de Janeiro, 1971.
[11] Roll P. G., Krotkov, and Dicke R. H., Ann. Phys. 26 (1964), 442.
[12] Galileu Galilei, O ensaiador, —, Florença, 1623, Tradução para o
português de Helda Barraco, para a Editora Nova Cultural, 2000.
[13]
, Dialoges Concerning two New Sciences, Dover, NY, 1954,
Publicação original em italiano publicada por Elzevir, Leyden
(Holanda), 1638.
[14]
, Diálogos sobre os dois máximos sistemas do mundo
ptolomaico e copernicano, Discurso Editorial, São Paulo, 2004,
Tradução, introdução e notas de Pablo Rubén Mariconda da publicação
original em italiano publicada por Giovanni-Batista Landini, Florença,
1632.
[15] H. Goldstein, Classical Mechanics, second ed., Addison–Wesley,
Reading, 1980.
[16] W. A. Granville, P. F. Smith, and W. R. Longley, Elementos de cálculo
diferencial e integral, Editora Científica, Rio de Janeiro, 1961.
[17] P. R. Halmos, Teoria ingênua dos conjuntos, Ed. USP – Polígono, SP,
1970, (1960).
[18]
, Finite-Dimensional Vector Spaces, Springer–Verlag, NY, 1974,
(1958).
[19] W. Hauser, Introduction to the Principles of Mechanics,
Addison–Wesley, Reading, 1965.
[20] A. Houaiss, Dicionário eletrônico Houaiss da língua portuguesa,
Editora Objetiva, Rio de Janeiro, 2001.
[21] MiKTeX, MiKTEX, 2004, www.miktex.org.
[22] I. Newton, Principia: princípios matemáticos de filosofia natural, Ed.
USP, SP, 1990, Tradução para o português da tradução para o inglês de
1934 da edição latina original de 1729.
[23] V. Oguri and et al., Estimativa e erros em experiemntos de física,
EdUERJ, Rio de Janeiro, 2005.
“ADT-MF” — 2005/11/7 — 8:51 — page 637 — #637
Referências
[24] Francis Weston Sears, Mechanics, Wave Motion, and Heat,
Addison–Wesley, Reading, 1958.
[25] Dava Sobel, A filha de Galileu: um retrato biográfico de ciência, fé e
amor, Companhia das Letras, São Paulo, 2000, (tradução de Eduardo
Brandão).
[26] K. R. Symon, Mechanics, 3th ed., Addison–Wesley, Reading, 1971.
[27] J. L. Synge and B. A. Griffith, Principles of Mechanics, 3th ed.,
McGraw–Hill, NY, 1959.
[28] Armando Dias Tavares, Inertial versus gravitational mass and Eötvös
experiments, An. Acad. brasil. Ciênc. 57 (1985), 5.
[29] Barry N. Taylor, Guide for the Use of the International System of Units
(SI), Special Publication 811, NIST, 1995, «Disponível no endereço
http://physics.nist.gov/cuu/Units/bibliography».
[30]
, The International System of Unitis (SI), NIST Special
Publication 330, NIST, 2001.
[31] TUG, TEX User Grup, 2001, www.tug.org.
[32] R. v. Eötvös, Mathematische und Naturwissenschaftliche Berichte aus
Ungarn 8 (1890), 65, cf.
www.kfki.hu/∼tudtor/eotvos1/onehund.html#egy.
637
“ADT-MF” — 2005/11/7 — 8:51 — page 638 — #638
Índice Remissivo
acústica, 527
aceleração, 569
– angular
– – instantânea, 323
– – média, 323
– centrípeta, 312
– de arrastamento, 344
– de Coriolis, 345
– de transporte, 344
– normal, 299
– relativa, 345
– tangencial, 299, 301
aceleração, 124
– instantânea, 298
– média, 297
– normal da gravidade, 383
adição, 71
adição, 120
afélio, 239
alcance, 397, 480
algarismo
– significativo, 78
álgebra dos complexos, 509
amplitude, 428
analogia física, 555
ângulo
– central, 302
– de repouso, 227
aproximação, 454
arco
– comprimento, 265
argumento, 427, 431
associatividade, 71, 112, 128
atração
– gravitacional, 365
– gravífica, 365
atraso, 503, 504
atrito, 226
– cinético, 227
– estático, 227
Atwood, 387
avanço, 504
balística, 398
balança
– analítica, 220
– de braços desiguais, 221
– de Eötvös, 372
– estabilidade da, 220
– fidelidade da, 220
– justeza da, 220
– rapidez da, 220
– rigidez da, 220
– sensibilidade da, 220, 223
batimento, 512, 559–564
binário, 159, 160, 215, 399
binário, 166
círculo
638
“ADT-MF” — 2005/11/7 — 8:51 — page 639 — #639
639
Índice Remissivo
– de referência, 502
caderno de notas, 29
cálculo
– vetorial, 189
cálculo
– integral, 209
– tensorial, 156
capacitância, 555
carga
– elétrica, 366
– resinosa, 366
– vítrea, 366
causa, 31
celeridade, 256
– média, 258
centróide, 404–406
centro
– de gravidade, 175, 203, 404, 406
– – linear de pesos, 203
– de massa, 166, 399, 401, 405, 406
– do volume, 404
centro de gravidade, 406
ciclo, 425
cilindro dançante, 563
cinemática, 233
cinética, 233
circunferência
– representativa do MHS, 331
coeficiente
– de atrito
– – estático, 226
– de compressibilidade, 491
– de correlação, 472, 475
– específico de atração, 374
complexos, 509
componente, 94, 190
comprimento de onda, 566
comutatividade, 111
condição
– equilíbrio
– – corpo rígido, 218
condições de contorno, 578
confiança, 75
conjugado, 160, 166, 215
coordenadas, 49
corda
– comprimento, 265
corpo, 130
– rígido, 160, 410
correspondência
– biunívoca, 47
Coulomb, 366
cruz, 221
curvatura, 303, 304
– média, 303
decremento logarítmico, 543
defasagem, 333
definição, 41
deflexão, 39, 500
deformação, 81, 491
– específica, 488
– específica por torção, 491
densidade, 403
derivada, 214
derivada logarítmica, 542
derivada parcial, 567
desvio-padrão, 76
Descartes, 49
deslocamento, 256, 260, 261
– angular, 322
– sobre a curva, 264
– vetor, 264
desvio, 75, 468, 473
– absoluto médio, 76
– médio, 77
desvio-padrão
– experimental da média, 77
determinante, 195
dia
– solar, 386
diferença de fase, 504
diferencial, 214
difração de Fraunhofer, 511
dinamômetro, 69, 81
dinâmica, 233, 233
dinamômetro, 42
“ADT-MF” — 2005/11/7 — 8:51 — page 640 — #640
640
Índice Remissivo
direto, 154
discrepância, 66, 198
dispersão, 75
distributividade, 128, 131
domínio, 43
Eötvös, 370, 372, 373
Einstein, 246
eixo, 47
– das abscissas, 47
– das ordenadas, 47
elasticidade
– módulo volumétrico de , 491
elemento neutro, 130, 131
eletromagnetismo, 242
elevação, 397
equação
– característica, 535
– da onda, 567, 569, 575
– de Maxwell, 242
– diferencial, 330, 429–431, 454, 534,
535, 551, 554
– – da onda, 569
– – de derivadas parciais, 569
– – do MHS, 430, 529
– fundamental da dinâmica, 363
– paramétrica da trajetória, 253
erro, 468
– absoluto, 75
– acidental, 72
– de paralaxe, 73
– experimental, 74
– grosseiro, 73
– médio da média, 77
– médio padrão da média, 77
– médio quadrático, 76
– relativo percentual, 77
– sistemático, 72
– tolerável, 77
escalar, 128, 132
esforço, 491
– de cisalhamento, 488
– de corte, 488
– específico, 488
– específico médio, 488
espaço
– absoluto, 234
– percorrido, 256, 259, 261, 313
– vetorial, 128
estática, 233, 233
Euler, 510
experiência, 39, 65, 81, 86, 88, 433, 434,
556, 558–563
experimentação, 30, 39
extensão, 132
extrapolação, 52, 71
fórmula de Euler, 510
faixa
– de confiança, 88
fase, 333, 427, 431
– concordância de, 505
– diferença de, 333
– inicial, 428, 431, 502, 503
– oposição de, 505
fasor, 504
– rotatório, 504
fato, 31
– bruto, 37, 39
– científico, 39
– científico, 37
– natural, 30
fator
– de amortecimento, 533
– de qualidade, 544
fiel, 221
figuras de Lissajous, 522
foguete, 398
força, 124
– centrípeta, 369
– de atrito
– – cinético, 226
– – estático, 226
– externa, 400
– interna, 400, 401
– nula, 126
– reversa, 179
forma da onda, 566
“ADT-MF” — 2005/11/7 — 8:51 — page 641 — #641
641
Índice Remissivo
Fourier, 528
Fraunhofer, 511
freqüência, 331, 425, 569
– angular, 428, 496
função
– afim, 51, 457
– biunívoca, 42
– inversa, 42
– linear, 50
– unívoca, 42
instrumento, 467
integral, 212
– de Riemann, 209, 214
interpolação, 52, 69
intervalo
– de tempo, 254
invariância, 235, 242
investigação
– experimental, 70
– teórica, 70
Galileu, 121, 242, 607
Gauss, 75
geometria, 302
grafostática, 114
grandeza
– derivada, 376
– física, 71
– fundamental, 376
– física, 42
– homogêneas, 71
– vetorial, 120, 124
gravitação universal
– lei da, 365
grupo, 119, 124, 127, 130, 134, 136, 246
– abeliano, 119, 124, 125, 131
– aditivo, 128
– comutativo, 125
– de transformações
– – de Galileu, 242
– – de Lorentz, 246
– galileano, 242
Kepler, 365, 366
harmônico, 527, 578
– fundamental, 528
Hooke
– lei de, 489
igualdade, 71
impedância, 553, 555
inércia, 363
incremento
– angular, 322
indutância, 555
Lamy, 102
latitude, 367
lei
– da atração universal, 237
– da inércia, 121
– de Coulomb, 366
– de interdependência, 43
– (s) de Newton, 121, 401
levogiro, 154
limite
– de elasticidade, 490
– inferior, 212
– superior, 212
Lissajous, 522
logarítmica
– derivada, 542
Lorentz, 243
máquina
– de Atwood, 387
massa, 124, 361, 364
– elétrica, 366
– específica, 403
– – média, 403
– – superficial, 406
– gravífica, 374
– gravífica, 365
– inerte, 364, 374
mecânica, 233
– de Newton, 235
– quântica, 579
“ADT-MF” — 2005/11/7 — 8:51 — page 642 — #642
642
Índice Remissivo
medição, 71
medição, 42
média
– aritmética, 75
medida, 42, 71
método
– científico, 29
– dos mínimos quadrados, 45, 462, 463
– trigonométrico, 96, 114
metro, 379
MHS, 427
Michelson, 242
mínimos quadrados, 88
míssil, 398
MMQ, 463
modelo, 32
– matemático, 32
modo fundamental, 578
modos de vibração, 578
módulo
– de elasticidade, 490
– de Young, 53, 490, 498
– volumétrico de elasticidade, 491
momento, 174
– de força, 171
– de inércia, 54, 389, 437
– em relação ao eixo, 436
momentum
– linear, 235, 361
Morley, 242
movimento
– aparente, 501
– circular, 312
– – acelerado, 321
– – uniforme, 312
– – uniformemente acelerado, 312
– circular uniforme, 501
– curvilíneo, 313
– harmônico
– – criticamente amortecido, 536–537
– – forçado, 550–555
– – subamortecido, 537–550
– – superamortecido, 536
– harmônico simples, 330, 331, 427,
496, 500
– – parcial, 527
– – representação geométrica, 500
– pendular, 331
– periódico
– – simples, 331
– periódico, 330, 425, 512
– retilíneo
– – uniforme, 312, 315
– – uniformemente acelerado, 315
– – uniformemente variado, 312
– – variado, 312
– vibratório
– – simples, 331
multiplicação, 71
nós, 579
número de onda, 571
Newton, 121, 234, 235, 242, 365
– leis de, 121
número
– complexo, 504
– real, 47
observação, 29, 30
onda
– equação da, 567
– estacionária, 578
– longitudinal, 572
– transversal, 572
operação
– associativa, 130
– fechada, 130
par ordenado, 47
paralaxe, 73
partícula, 160, 234
– girante, 502
– vibrante, 502
pêndulo
– físico, 455
– simples, 453, 455
período
“ADT-MF” — 2005/11/7 — 8:51 — page 643 — #643
643
Índice Remissivo
– de onda, 567
periélio, 239
período, 330, 425, 431, 512
peso
– aparente, 370
– específico, 213, 405
– – médio, 213
– – num ponto, 213
pesquisa básica, 30
ponto
– de inflexão, 313
– médio, 469
– material, 234
– vibrante, 502
postulado, 40, 70, 75
– enunciado, 86, 89, 94, 111, 160, 161
princípio
– da relatividade
– – de Galileu, 246
– – de Lorentz, 246
– da relatividade de
– – Galileu, 242
– da superposição, 172
problema, 56–58, 104–109, 119, 120,
125, 128–133, 135, 136, 140, 141,
147–149, 151–153, 167–170, 177,
195, 202, 203, 205, 207, 208, 219,
221, 222, 229, 277, 278, 280, 282,
285, 287, 289, 290, 294, 295,
352–354, 384–386, 394, 395,
410–416, 418, 419, 426, 427, 433,
434, 446–448, 450, 496–498, 500,
544–550, 572, 575, 579, 580
produto
– vetorial, 182, 189, 192
projétil, 395
– balístico, 398
projeção, 190
– ortogonal, 501
propriedade
– anti-simétrica, 155
– anticomutativa, 192
– associativa, 71, 112
– distributiva, 192
pseudo-vetor, 156
pulsação, 428
Q do sistema, 544
quadrante, 47
quantidade de movimento, 361
radiano, 303
raio
– de curvatura, 304
– – médio, 303
– de giração, 451
rapidez, 256
– média, 258, 259
reatância, 553, 555
regra
– da mão direita, 154
– da mão esquerda, 154
– do fechamento da poligonal, 114
– do paralelogramo, 40, 85, 94, 102,
173, 181, 250
– do polígono, 114
– do triângulo, 102
replemento, 137
resíduo, 75, 461, 473
resistência ôhmica, 555
ressonância, 556–564
resultante, 93
reta
– de regressão, 472, 476
rotação, 156
série
– de Taylor, 543
segmento equipolente, 113
simetria, 613
simétrico, 130
sinistrogiro, 154
sistema
– de coordenadas, 49
– – cartesianas, 251
– – polares, 251
– de Copérnico, 238
“ADT-MF” — 2005/11/7 — 8:51 — page 644 — #644
644
Índice Remissivo
– galileano, 241
– inercial, 234, 242
– levógiro, 153
– nulo de forças, 161
sobrecarga, 221
solução geral, 430, 535, 537, 538, 552,
553
solução particular, 551
soma
– inferior, 212
– superior, 212
Stevinus, 102, 103
subcorpo, 132
tangente, 267
telescópio, 607
tempo, 242
– absoluto, 234
tensão, 491
tensor, 155
– anti-simétrico, 156
– – de segunda ordem, 156
teorema
– de Fourier, 528
– de Varignon, 177
– dos eixos paralelos, 439
teoria, 32
– eletromagnética, 242
torção, 491
trajetória, 252
transformação
– de Galileu, 243, 244
– de Lorentz, 243, 244, 246
– galileana, 241, 242
– linear, 245
travessão, 221
trem de ondas, 569
triângulo de forças, 151
Tycho Brahe, 366
um (1), 131
unidade, 71
– de celeridade, 271
– de momento, 174
– de peso, 39
– de velocidade, 271
– fundamental, 376
– unificada de massa atômica, 57
unidades
– sistema de, 376
– sistemas coerentes, 376
valor
– de referência, 462
– mais provável, 462
variância, 76
Varignon, 102
velocidade, 256, 267
– absoluta, 339
– angular, 253
– – instantânea, 306, 322
– – média, 305, 322
– da luz, 242
– de arrastamento, 339
– de translação, 339
– de transporte, 339
– média, 254
ventres, 579
versor, 190
vetor, 134
– axial, 154, 156
– corrente, 161
– deslizante, 161
– deslocamento, 254, 256, 264
– girante, 504
– limite, 267
– polar, 153
– posição, 250
– posição, 129
– pulsante, 504
– velocidade
– – instantânea, 267
– – média, 264
– – média, 254, 259
– vibrante, 504
Young
– módulo de, 53
“ADT-MF” — 2005/11/7 — 8:51 — page 645 — #645
Índice Remissivo
zero, 130
645