UNIVERSIDADE FEDERAL DO ABC
CURSO DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA
Thiago Abraão dos Anjos da Silva
MODELAGEM E CONTROLE DE FORÇA DE UM EFETUADOR GARRA
Dissertação
Santo André
Novembro de 2013
Thiago Abraão dos Anjos da Silva
MODELAGEM E CONTROLE DE FORÇA DE UM EFETUADOR GARRA
Dissertação
Dissertação apresentada ao Curso de Pós-graduação da Universidade Federal do ABC,
como requisito parcial para obtenção do grau de Mestre em Ciências em Engenharia
Mecânica.
Orientadores: Dr. Magno Enrique Mendoza Meza
Dr. André Fenili
Santo André, SP – Brasil
Novembro de 2013
POS-GRADUAÇÃO EM ENGENHARIA MECÂNICA
Universidade Federal d o ABC
FOLHA DE ASSINATURAS
Assinaturas dos m e m b r o s da Banca Examinadora que avaliou e aprovou
a Defesa de Dissertação de Mestrado do candidato Thiago Abraão dos
Anjos da Silva, e m 27 de n o v e m b r o de 2 0 1 3 :
Prof. Dr. Magno Enrique lYlendoza^Meza (UFABC) - Presidente
Prof. Dr. André Fenili (UFABC) - Membro titular
Á
Prof. Dr. Karl Peter Burr (UFABC) - Membro titular
1
TL/
-
Prof. Dr. José Manoel Balthazar (UNESP) - Membro titular
Prof. Dr. Alfredo Del Sole Lordelo (UFABC) - Membro suplente
Prof. Dr. Luis Alberto Martinez Riascos (UFABC) - Membro suplente
Prof. Dr. O u m a r Diene (UFRJ) - Membro suplente
Universidade Federal do ABC, Av. dos Estados, 5.001 - CEP 0 9 2 1 0 - 5 8 0 - Santo André - SP
Tel. 0 XX 11 - 4 9 9 6 - 0 0 8 6 www.ufabc.edu.br
E s t e e x e m p l a r foi r e v i s a d o e a l t e r a d o e m relação à versão o r i g i n a l ,
d e a c o r d o c o m a s observações l e v a n t a d a s p e l a b a n c a n o d i a d a
d e f e s a , s o b r e s p o n s a b i l i d a d e única d o a u t o r e c o m a anuência d e
seu orientador.
S a n t o André,
(0
Assinatura do autor:
Assinatura do orientador:
Dedico este trabalho aos meus
pais, amigos e a minha noiva.
v
Agradecimentos
À Pro-Reitoria de Pós-Graduação da Universidade Federal do ABC pela bolsa concedida
e a todo o corpo docente com o qual convivi nestes últimos anos.
Ao meu orientador Prof. Dr. Magno Enrique Mendoza Meza e ao co-orientador Prof.
Dr. André Fenili, pelo acompanhamento e paciência desde do inicio dessa pesquisa. Aos
meus pais por sempre me apoiarem e por contribuı́rem para minha formação intelectual.
Aos meus irmãos Rodrigo Pereira e Giseli Pereira pelos inúmeros momentos de conversa e reflexão.
A minha namorada pelo apoio incondicional e a paciência durante todo perı́odo ao
qual esta pesquisa foi desenvolvida.
Aos amigos que convivi durante o perı́odo de estudos que sempre me apoiaram e me
ajudaram a crescer como ser humano.
A todos os que direta ou indiretamente contribuı́ram para a realização desta pesquisa.
vi
Resumo
O objetivo deste trabalho é apresentar a modelagem matemática de um manipulador
garra, composto por dois pêndulos invertidos com um grau de liberdade cada. Duas massas
paralelas, interligadas por um amortecedor e uma mola são consideradas como um objeto
no qual os pêndulos interagem, nessas condições a modelagem do sistema foi dividida
em duas partes. No primeiro momento os pêndulos executam um movimento livre sem o
contato com as massas, durante esse movimento o modelo possui o total de quatro equações
diferenciais de segunda ordem, considerando em espaço de estados, há um total de oito
estados. Em segundo momento ocorre o impacto e em seguida o contato entre os pêndulos
e as massas. Após o impacto, é realizado o cálculo das novas velocidades, considerando o
impulso igual a variação da quantidade de movimento linear e o coeficiente de restituição
igual a zero. As massas representam os vı́nculos de restrição ao movimento dos pêndulos,
nesse caso têm-se dois vı́nculos para cada um dos pêndulos, durante o contato o sistema
esta totalmente acoplado e utilizando as equações vı́nculo as são reduzidas para duas
equações de segunda ordem. Ainda neste trabalho é abordado o problema do controle de
força durante o perı́odo de transição de contato em manipuladores robóticos. O principal
enfoque se baseia na obtenção de um modelo dinâmico que representa a configuração do
sistema ao longo do tempo e a análise de impacto na interação fı́sica entre os pêndulos
e as massas. Para obter o modelo dinâmico utilizam-se as equações de Euler-Lagrange.
Com o modelo dinâmico obtido, implementou-se um integrador numérico Runge-Kutta
de quarta ordem para a realização de simulações numéricas. Usado a técnica de controle
explı́cito de força, definiu-se um controlador de força, proposto para manter um valor de
força adequado durante o contato com as massas.
Palavra-chave: Dinâmica de Contato, Controle de Força, Efetuador Robótico.
vii
Abstract
The objective of this work is the mathematical modeling of a manipulator claw, consisting of two inverted pendulums with one degree of freedom each. Two parallel masses
connected by a spring and a damper are considered as an object on which the pendulums
interact under these conditions the modeling of the system was divided into two parts.
At first pendulums run a free movement without contact with the masses, during this
movement the model has a total of four differential equations of second order, whereas in
the state space, there are a total of eight states. Second time the impact and then the
contact between the pendulums and masses occurs. After impact, the calculation of the
new speed is performed considering the impulse equals change of linear momentum and
the restitution coefficient equal to zero. The masses represent the bonds of restriction
on movement of pendulums in this case have two links for each of the pendulums during
contact the system is fully coupled and using the bond equations are reduced to the two
equations of second order. Although this work addresses the problem of force control during the transition period of contact in robotic manipulators. The main approach is based
on obtaining a dynamic model that represents the configuration of the system over time
and impact analysis in the physical interaction between the impactor and the masses. For
the dynamic model using the equations of Euler - Lagrange. With the dynamic model
obtained, implemented a Runge - Kutta numerical integrator of fourth order to perform
numerical simulations. Used the technique of explicit force control , we defined a force
controller, proposed to maintain an adequate amount of force during contact with the
masses.
Keyword:
Dynamic Contact, Force Control, Robotic effector
viii
Sumário
Lista de Figuras
xi
Lista de Tabelas
xiii
1 Introdução
1.1 Breve descrição da modelagem de sistemas com restrições
1.2 Motivação e Justificativa . . . . . . . . . . . . . . . . . .
1.3 Modelagem do contato e impacto entre corpos rı́gidos . .
1.4 Controle de força em manipuladores robóticos . . . . . .
1.5 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6 Organização da dissertação . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
1
2
2
3
4
5
6
.
.
.
.
.
.
.
7
8
10
13
16
18
18
26
3 Controle de força explı́cito
3.1 Controle de força explicito . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Lei de Controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Controle de Força e a constante elástica da mola . . . . . . . . . . . . . . .
33
34
36
38
2 Modelagem Matemática
2.1 O modelo do sistema sem restrições ao movimento . .
2.1.1 Equações governantes do primeiro pêndulo . .
2.1.2 Equações governantes do segundo pêndulo . .
2.1.3 Equações governantes das massas compliantes
2.2 O modelo do sistema com restrições ao movimento . .
2.2.1 As equações do vı́nculo e os multiplicadores de
2.2.2 Cálculo das velocidades após o impacto . . . .
ao movimento
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
Lagrange
. . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4 Simulação Numérica
39
4.1 Implementação do integrador numérico . . . . . . . . . . . . . . . . . . . . 39
ix
4.2
Simulação numérica do sistema . . . . . . . . . . . . . . . . . . . . . . . . 40
4.2.1 Simulação do sistema sem controle . . . . . . . . . . . . . . . . . . 40
4.2.2 Simulação do sistema com controle . . . . . . . . . . . . . . . . . . 41
5 Conclusões e discussões
55
6 Trabalhos Futuros
57
Referências Bibliográficas
58
x
Lista de Figuras
2.1
2.2
2.3
. . . . . . . . . . . . . . . . . . . . . 9
Exemplo de possibilidade de impacto. . . . . . . . . . . . . . . . . . . . . . . . . 10
Detalhes do modelo mecânico considerado.
Detalhes do primeiro pêndulo, mostrando como obter h1 , para obter h3 é considerado o
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Detalhes do segundo pêndulo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Detalhes do sistema em contato, a distância entre os pêndulos e as massas é igual a zero. 19
Diagrama de forças envolvidas para o primeiro pêndulo com a interação com a massa 1. 27
Representação das componentes das velocidades do primeiro pêndulo. . . . . . . . . . 29
Diagrama de forças envolvidas para o segundo pêndulo com a interação com a massa 2.
31
mesmo procedimento.
2.4
2.5
2.6
2.7
2.8
3.1
3.2
3.3
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
4.9
4.10
. . . . . . . . . . . . . . . . . 35
Detalhes do primeiro pêndulo com o diagrama de forças. O lei de controle
deve eliminar o efeito da gravidade. . . . . . . . . . . . . . . . . . . . . . . 37
Detalhes do segundo pêndulo com o diagrama de forças envolvidas. A lei
de controle deve eliminar o efeito da gravidade . . . . . . . . . . . . . . . . 37
Diagrama de Blocos do Controle Explicito de Força.
Fluxograma da rotina do programa. . . . . . . . . . . . . . . . . .
Deslocamento angular do primeiro pêndulo. . . . . . . . . . . . . . . . .
Deslocamento angular do segundo pêndulo. . . . . . . . . . . . . . . . .
Velocidade angular do primeiro pêndulo. Sistema sem controle de força. . . .
Velocidade angular do segundo pêndulo. Sistema sem controle de força. . . .
Deslocamento da massa 1. . . . . . . . . . . . . . . . . . . . . . . . .
Deslocamento da massa 2. . . . . . . . . . . . . . . . . . . . . . . . .
Velocidade linear da massa 1. Sistema sem controle de força. . . . . . . . .
Velocidade linear da massa 2. Sistema sem controle de força. . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
40
42
43
44
44
45
45
46
46
Força normal de contato entre o primeiro pêndulo e massa 1. Sistema sem controle de
força.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
xi
4.11 Força normal de contato entre o segundo pêndulo e massa 1. Sistema sem controle de
força. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.12 Força normal de contato entre o primeiro pêndulo e massa 1, e o valor da distancia entre
eles.Sistema sem controle de força. . . . . . . . . . . . . . . . . . . . . . . . . .
4.13 Força normal de contato entre o primeiro pêndulo e massa 1, e o valor da distancia entre
eles.Sistema sem controle de força. . . . . . . . . . . . . . . . . . . . . . . . . .
4.14 Deslocamento do primeiro pêndulo. Sistema com controle de Força. . . . . . . . . . .
4.15 Deslocamento do segundo pêndulo. Sistema com controle de Força. . . . . . . . . . .
4.16 Deslocamento da massa 1. Sistema com controle de Força. . . . . . . . . . . . . . .
4.17 Deslocamento da massa 2. Sistema com controle de Força. . . . . . . . . . . . . . .
4.18 Velocidade liner da massa 1. Sistema com controle de força. . . . . . . . . . . . . .
4.19 Velocidade liner da massa 2. Sistema com controle de força. . . . . . . . . . . . . .
4.20 Torque de controle calculado para o primeiro pêndulo. Sistema com controle de força. .
4.21 Torque de controle calculado para o segundo pêndulo. Sistema com controle de força. .
4.22 Força normal de contato entre o pêndulo 1 e massa 1. Sistema com controle de força. .
4.23 Força normal de contato entre o pêndulo 2 e massa 2. Sistema com controle de força. .
4.24 Detalhes da animação criada no Matlabr , sequência de figuras da animação
para a verificação dos resultados. . . . . . . . . . . . . . . . . . . . . . . .
xii
47
48
48
49
49
50
50
51
51
52
52
53
53
54
Lista de Tabelas
2.1
Possibilidades de Impacto do caso simétrico. . . . . . . . . . . . . . . . . .
4.1
4.2
Tabela com os valores dos parâmetros usados para simulação. . . . . . . . 41
Tabela com os valores dos parâmetros usados para simulação. . . . . . . . 42
xiii
9
Lista de Sı́mbolos
τ1
Torque no primeiro pêndulo
τ2
Torque no segundo pêndulo
θ3
Ângulo do primeiro pêndulo no sentido anti-horário (positivo)
θ4
Ângulo segundo do pêndulo no sentido horário (negativo)
Ax3
Reação do Apoio no primeiro pêndulo
Ax4
Reação do Apoio no segundo pêndulo
c
Constante do amortecedor [Ns/m]
d
Distância do primeiro pêndulo ao segundo pêndulo
d1
Distância do primeiro pêndulo a massa 1
d2
Distância do segundo pêndulo a massa 2
h1
Altura em relação ao centro de massa do primeiro pêndulo
h2
Altura em relação ao centro de massa do segundo pêndulo
h3
Altura em relação a massa 3 na ponta da haste do primeiro pêndulo
h4
Altura em relação a massa 4 na ponta da haste do segundo pêndulo
k
Constante elástica da mola dada em [N/m]
L
Lagrangiano
L1
Distância inicial da massa 1
L2
Distância inicial da massa 2
xiv
L3
Comprimento da haste do primeiro pêndulo
L4
Comprimento da haste do segundo pêndulo
Lcm3 Comprimento do centro de massa do primeiro pêndulo
Lcm4 Comprimento do centro de massa do segundo pêndulo
m1
Massa do bloco 1
m2
Massa do bloco 2
m3
Massa na ponta da haste do primeiro pêndulo
m4
Massa na ponta da haste do segundo pêndulo
mb3
Massa da haste do primeiro pêndulo
mb4
Massa da haste do segundo pêndulo
Px3
Variação da quantidade de movimento na direção x para a massa 1
Px4
Variação da quantidade de movimento na direção x para a massa 2
Py3
Variação da quantidade de movimento na direção y para a massa 1
Py4
Variação da quantidade de movimento na direção y para a massa 2
R
Energia de Rayleigh
T
Energia Cinética
V
Energia Potencial
x1
Variação do deslocamento da massa 1
x2
Variação do deslocamento da massa 2
xv
1
Introdução
Atualmente existe uma crescente necessidade de realizar tarefas com eficiência e precisão
em lugares onde a interação humana torna-se difı́cil, arriscada ou até mesmo impossı́vel,
como por exemplo, o fundo do mar ou o espaço. Para resolver esse problema é necessária
a presença de mecanismos autônomos ou remotos que realizem tarefas sem risco aos seres
humanos, os robôs (ADAMS; HANNAFORD, 1999).
Muitas aplicações industriais e aeroespaciais envolvem sistemas mecânicos que durante
suas operações estão sujeitos a impactos. Apenas para citar alguns exemplos podemos
mencionar: mecanismos com folgas, máquinas de forja ou similares, impressoras, interruptores e conectores elétricos, e satélites sujeitos a impactos de pequenos escombros ou
de acoplamento com outras estruturas espaciais (VALER, 2004).
No entanto, existe outro tipo de operação dos manipuladores robóticos que envolvem
impacto, que é importante e acontece frequentemente em aplicações industriais. Esta
operação é a transição de um movimento livre a um movimento restringido e será a motivação principal desta proposta de trabalho.Efetuadores finais(grippers) possuem diversas
funções como garras paralelas, ferramentas de solda e pinças especializadas são comumente utilizadas nos sistemas robóticos atuais. Essas interfaces têm como vantagem o
fato de serem de projeto mecânico de simples concepção, acarretando assim uma maior
confiabilidade de utilização e custos de manutenção reduzidos (SANCHEZ, 2008).
Existe uma grande variedade de possı́veis situações de tarefas que exigem uma maior
flexibilidade, portanto, faz-se necessário uma técnica mais universal para interagir com o
meio ambiente. Operações de manipulação de objetos ou operações espaciais requerem
um efetuador final com um alto grau de destreza. Por exemplo, em operações espaciais
existem um elevado número de tipos de ferramentas auxiliares além de diversas interfaces
que são usadas para operações fora de uma estação espacial (SANCHEZ, 2008; VALER,
2004).
Existe ainda aplicações do estudo de manipuladores robóticos para a elaboração de
próteses humanas, ou ate mesmo em ambientes virtuais, sendo utilizando com bastante
eficácia, por exemplo, para o treinamento e aprendizagem (SINNET; ZHAO; AMES,
1
2011).Dentro dessa lógica é possı́vel testar diferentes membros (superiores e inferiores)
(LIU, 2008; LIU; HERTZMANN; POPOVIĆ, 2005; VALER, 2004)
1.1
Breve descrição da modelagem de sistemas com
restrições ao movimento
A modelagem matemática do contato e impacto é um fator importante para a simulação
dinâmica de manipuladores robóticos. O fenômeno do impacto ocorre quando um corpo
colide com um ou mais corpos, sendo uma caracterı́stica a interação de forças em curto perı́odo de tempo, troca e dissipação rápida de energia e grandes acelerações e desacelerações
dos corpos envolvidos.
A palavra contato é mais ambı́gua ou mais geral e na literatura é frequentemente
trocada com impacto, no entanto é mais adequada para descrever situações onde dois
corpos se tocam em presença de forças de interação limitadas. Consultando a literatura, encontra-se duas abordagens diferentes utilizadas para modelar o impacto/contato
(INGAR, 2004).
A primeira abordagem supõe que a interação entre os corpos acontece em um perı́odo de tempo tão curto que pode ser considerado como um evento instantâneo e que a
configuração dos corpos impactantes justo antes e depois deste evento é a mesma.
A segunda abordagem para modelagem de impacto é baseada no fato que as forças de
interação atuam de maneira contı́nua durante o impacto. Logo, estas forças podem ser
determinadas através de algum modelo de contato e adicionadas as equações de movimento
durante os perı́odos em que estas atuam. Esta abordagem, a qual será referenciada neste
trabalho como o Método do Elemento de Contato, permite uma descrição mais realista do
comportamento de um sistema embora computacionalmente seja um pouco mais pesada
comparada ao Método do Balanço de Momentum pois é preciso integrar a equação de
movimento muitas vezes durante o perı́odo de contato (GILARDI; SHARF, 2002a).
Para modelar o impacto são usadas as equações de balanço da quantidade de movimento em combinação com coeficientes de restituição. Na literatura, esta abordagem é
referenciada como o Método do Balanço de Momentum e devido a hipótese do impacto
instantâneo resulta em uma formulação matemática simples com uma solução numérica
computacionalmente eficiente.
1.2
Motivação e Justificativa
A motivação inicial para esta pesquisa surgiu da necessidade de investigar a dinâmica de
contato envolvida em situações onde ocorra restrições ao movimento e em transição de
um movimento livre para um movimento onde ocorra o contato. Em inúmeras situações é
2
possı́vel verificar situações que envolvam restrições de movimento,em especial na robótica,
a inúmeros cenários possı́veis, um robô ao fixar uma peça, ao realizar o transporte de um
material, necessita para essas tarefas um controle adequado e a capacidade de lidar com
as restrições na execução desses movimentos.
Uma das tarefas do manipulador tipo garra proposto é analisar a interação do manipulador livre (sem contato) e a transição para o sistema em contato (com restrição).
O interesse em estudar a dinâmica de contato encontra-se em problemas de instabilidade que se encontram na robótica quando manipuladores robóticos tentar fazer contato
com um ambiente, como nas atividades de agarrar ou empurrar contra objetos. É também muito interessante sobre as investigações atuais que o manipulador robótico capaz
de apresentar alguma flexibilidade estrutural em suas ligações (ou em suas articulações).
Em uma análise mais completa , também é necessário algum conhecimento sobre o meio
ambiente.
1.3
Modelagem do contato e impacto entre corpos
rı́gidos
A modelagem de contato e impacto é um aspecto importante para a simulação dinâmica
de manipuladores robóticos que executam tarefas envolvendo interação com seu meio
de trabalho. O impacto refere-se ao fenômeno fı́sico que acontece quando um corpo
colide com outro, tendo como caracterı́sticas: uma duração muito curta atingindo altos
nı́veis de forças de interação, troca e dissipação rápida de energia e, grandes acelerações e
desacelerações dos corpos envolvidos. A palavra contato é mais ambı́gua ou mais geral e
na literatura é frequentemente trocada com impacto, mas é mais adequada para descrever
situações onde dois corpos se tocam em presença de forças de interação limitadas.
Revisando a literatura, encontramos duas abordagens diferentes usadas para modelar
impacto/contato. A primeira abordagem supõe que interação entre os corpos acontece em
um perı́odo de tempo tão curto que pode ser considerado como um evento instantâneo e
que a configuração dos corpos impactantes justo antes e depois deste evento é a mesma
(GILARDI; SHARF, 2002a; RADJAI; RICHEFEU, 2009). Para modelar o impacto são
usadas as equações de balanço da quantidade de movimento em combinação com coeficientes de restituição (BRENDEL; UNGER; WOLF, 2002,?; GILARDI; SHARF, 2002b;
TONG, 2004-2005). Na literatura, esta abordagem é referenciada como o Método do
Balanço de Momentum e devido à hipótese do impacto instantâneo resulta em uma formulação matemática simples com uma solução numérica computacionalmente eficiente.
Em (PFEIFFER; GLOCKER, 1996) encontramos diversas aplicações deste método a
sistemas de multi-corpos. No trabalho de (BROGLIATO; NICULESCU; ORHANT, 1997)
é usado para a modelagem de impacto em sistemas mecânicos discretos e, em (WEE; WAL-
3
KER, 1993), para modelar impacto em manipuladores robóticos com elementos rı́gidos.
O Método do Balanço de Momentum, embora tenha sido desenvolvido basicamente
para sistemas de corpos rı́gidos, também tem sido aplicado em sistemas de corpos flexı́veis. Em (CIAVARELLA, 1998; ESCALONA; MAYO; DOMı́NGUEZ, 1998)o Método do
Balanço de Momentum é utilizado para estudar a dinâmica de uma viga rotativa sujeita
a impacto. Em (ESCALONA; MAYO; DOMı́NGUEZ, 1998), o método é utilizado para
modelar impactos repetitivos em um sistema flexı́vel com rotação continua.
1.4
Controle de força em manipuladores robóticos
Embora os manipuladores robóticos tenham sido estudados intensamente nas últimas duas
décadas (FERRETTI; MAGNANI; ROCCO, 1995; SCIAVICCO; SICILIANO, 1996), estes estudos têm sido focado principalmente ao controle de posição. No entanto, a crescente
demanda de execução de tarefas cada vez mais complexa - entre elas: usinagem, polimentos e montagens - criou a necessidade de controlar a força de interação entre a extremidade
do manipulador e o meio com o qual este deve fazer contato, dessa forma é imprescindı́vel
um controle de força adequado. Como consequência, a pesquisa na área incrementou-se
de maneira que na literatura podemos encontrar trabalhos sobre controle de força com
diversas abordagens (FISHER; MUJTABA, 1992; KWAN; YESILDIREK; LEWIS, 1999;
MAILAH; RAHIM, 2000; MARGARITU; DIANCONESCU, 1999; TANNER; KYRIAKOPOULOS, 2001).
Um dos primeiros métodos desenvolvidos para controlar força é o controle de rigidez(HOGAN, 1985), o qual regula a força de interação indiretamente através de um
controle baseado puramente em posição das juntas, sem medir a força de contato(DEDE;
OZGOREN, 2004; FISHER; MUJTABA, 1992; ZENG; HEMAMI, 1997). Neste tipo de
controle, o controlador atua nas juntas através de uma realimentação proporcional de
posição de maneira a criar no robô uma rigidez aparente e com isto acomodar as forças
de interação (KIM, 1999). Este tipo de controle é mais adequado durante a execução
de tarefas envolvendo movimentos lentos ou estáticos. O conceito de controle de rigidez
foi estendido por Hogan (HOGAN, 1985) no denominado Controle de Impedância. Este
controle regula a ”impedância mecânica”da extremidade, ou seja, a relação dinâmica entre
a posição da extremidade e as forças de interação que atuam sobre ela. Esta relação dinâmica é definida em termos de uma matriz de inércia, amortecimento e rigidez que devem
ser especificadas pelo projetista. Então, o controle da força é realizado implicitamente
através de uma referência para a posição da extremidade e a impedância.
O maior problema do Controle de Rigidez e Controle de Impedância é a sensibilidade
destes controladores a erros na posição e caracterı́sticas mecânicas (por exemplo rigidez) do
meio de trabalho. Isto devido a que estes métodos não utilizam realimentação da força de
contato para avaliar o erro de controle. Por outro lado, as estratégias de Controle Explı́cito
4
de Força utilizam medições da força de contato para avaliar o erro entre as forças medidas
e as forças desejadas e, através de uma lei de controle escolhida (por exemplo P, PD, PI
ou PID), os atuadores são comandados para diminuir este erro (ZENG; HEMAMI, 1997).
Tipicamente, as medições da força de interação são obtidas através de sensores de pulso,
localizados pouco antes da extremidade do manipulador (SCIAVICCO; SICILIANO, 1996;
TAVARES, 2012).
Uma outra estratégia de controle é o Controle Hı́brido de Força/Posicão que foi desenvolvida para manipuladores que têm que realizar tarefas envolvendo contato numa direção
e movimento livre em outra. Esta abordagem está baseada na observação que quando um
manipulador encontra-se em contato com o meio de trabalho, o espaço das coordenadas
da extremidade do manipulador pode ser decomposto em um ”sub-espaço de posição”e
um ”sub-espaço de força”; estes dois sub-espaços correspondem às direções nos quais a extremidade se encontra livre para se movimentar e restringido pelo meio, respectivamente.
Então o controlador aplica um controle de posição no sub-espaço de posição e de força no
sub-espaço de força.
Outras abordagens que encontramos na literatura são basicamente modificações das
anteriores. Usando técnicas de controle adaptativo, modificam o Controlador de Impedância para dotar este da capacidade de rastrear forças de referência e e assim proporcionar ao controlador robustez diante de incertezas do meio. No trabalho de (TANNER;
KYRIAKOPOULOS, 2001) temos uma abordagem que usa a teoria de controle do ModoDeslizante para formular um controlador de impedância robusto (KIM, 1999; TANNER;
KYRIAKOPOULOS, 2001) usa uma lei de controle Proporcional - Derivativa Não-Linear
(NPD) em um controlador explı́cito de força para melhorar o desempenho do controlador
e a rejeição de distúrbios externos.
Em SCIAVICCO; SICILIANO (1996) projetam um Controlador Hı́brido de Força/Posição adaptativo para um manipulador com incertezas nos seus parâmetros onde o
controle na direção restringida é feito através de uma lei de Controle Explı́cito de Força
Proporcional-Integral-Derivativa (PID) e, através do método de Lyapunov, é demonstrado
que a estabilidade do sistema, o acompanhamento de trajetórias na direção não restringida
e a regulação de forças na direção restringida é garantida.
1.5
Objetivos
O objetivo do projeto é obter e analisar a dinâmica de um manipulador garra e implementar um protótipo virtual para o manipulador, bem como controlar sua capacidade de
preensão na transmissão de contato. O controle projetado poderá ser um PID.
O manipulador garra é considerado como um sistema composto por dois dedos cada
um com dois graus de liberdade. Na transmissão de contato será projetado um controle
de força considerando um objeto com paredes paralelas, na qual existirá um momento de
5
contato.
1. Desenvolver a modelagem matemática de um sistema mecânico com restrição ao
movimento. O modelo terá um conjunto de equações diferenciais ordinárias.
2. Implementar um algoritmo de um integrador numérico Rugge-Kutta de quarta ordem, o qual realizará a integração das equações diferencias.
3. Elaborar simulações e avaliar os resultados.
4. Projetar o controle de força e verificar a sua robustez através de simulações.
1.6
Organização da dissertação
No capitulo 2, é apresentado o modelo mecânico e a modelagem matemática utilizando
Euler-Lagrange, o modelo é abordado com e sem restrições ao movimento.
No capı́tulo 3, é apresentada a teoria de controle de força empregada em manipuladores
robóticos, utilizando o controle de força explı́cito, um controlador de força é apresentado,
é o mostrado o desenvolvimento matemático para obter a lei de controle que define o
torque necessário para obter a força de referência.
No capı́tulo 4, é apresentada a simulação numérica do modelo com e sem controle de
força e definido os parâmetros do sistema. Para a simulação foi utilizado o Matlabr e
implementou-se um integrador Runge-Kutta de quarta ordem.
No capı́tulo 5, são apresentadas as conclusões e discussões finais a respeito do modelo
proposto e da simulação numérica.
No capı́tulo 6, comenta-se os trabalhos futuros, sugerindo melhorias para o modelo,
ensaio de novos controladores de força.
6
2
Modelagem Matemática
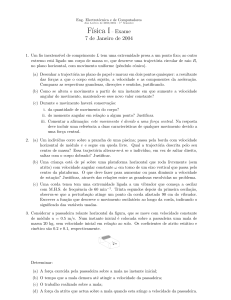
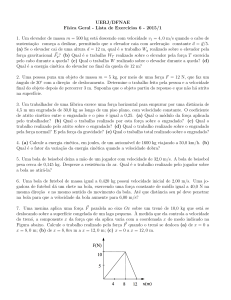
Neste capı́tulo é apresentado o modelo mecânico, a Figura 2.1, mostra os detalhes do
modelo. Como pode ser verificado, o modelo mecânico é constituı́do de dois pêndulos
posicionados a uma distância d, os pêndulos se deslocam conforme os ângulos, θ3 e θ4 , na
ponta das hastes dos pêndulos encontram-se as massas m3 e m4 . Antes do contato, as
massas m1 e m2 estão posicionados em relação a origem com distâncias L1 e L2 e x1 e x2
representam as variáveis de estados dos deslocamentos das massas m1 e m2 . As distâncias
d1 e d2 são utilizadas para verificar o instante em que ocorre o contato, neste caso quando
o valor delas é igual a zero. Entre as massa existe um amortecedor e uma mola para
permitir a simulação de diferentes condições.
Usando as Equações de Euler-Lagrange é possı́vel descrever o movimento de um sistema mecânico sujeito a restrições holonômicas, isto é, aqueles que apresentam equações
de restrição ligando suas coordenadas generalizadas. Quando o movimento de um sistema
mecânico de alguma maneira encontra uma restrição, surgem também as chamadas forças de restrição, isto é, as forças necessárias para que as restrições sejam satisfeitas. A
determinação das forças de restrição (também denominadas forças de vı́nculo ou forças
internas) nem sempre é uma tarefa simples. Dessa forma, a formulação Lagrangiana é uma
alternativa vantajosa, pois ela não requer a determinação das forças de restrição para a
obtenção das equações do movimento (FENILI; SCHAEFER, 2007; MEIROVITCH, 2010;
MILLER; MICHEL, 1982). Assim, temos que o Lagrangiano do sistema mecânico é dado
por (2.1).
Estuda-se nesta dissertação o caso simétrico, onde todos os parâmetros e condições
iniciais para cada pêndulo e cada massa são idênticas e simétricas, i.e., o sistema é composto por pêndulos simétricos com a mesma massa e o mesmo comprimento. Uma outra
abordagem é considerar o sistema de forma assimétrica, com variação do comprimento
dos pêndulos e massas diferentes.
L=K −V
(2.1)
onde K é a energia cinética e V é a energia potencial do sistema e R e a energia de Rayleigh
7
para o amortecedor. Então, as Equações de Euler-Lagrange (ou simplesmente, Equações
de Lagrange) são expressas como (MEIROVITCH, 2010)
d
dt
d
dt
∂L
∂ ẋ1
∂L
∂ θ̇1
∂L
∂R
−
+
=0
∂x1 ∂ ẋ1
d
dt
∂L
∂R
−
+
= τ1
∂θ1 ∂ θ̇1
d
dt
∂L
∂ ẋ2
∂L
∂ θ̇2
−
∂L
∂R
+
=0
∂x2 ∂ ẋ2
−
∂L
∂R
+
= τ2
∂θ2 ∂ θ̇2
onde τ1 e τ2 são os torques associados as juntas do primeiro pêndulo e do segundo pêndulo,
respectivamente. A partir disso, propõe-se o desenvolvimento do modelo dinâmico de um
sistema com duas garras, cada uma com uma articulação, a determinação desse modelo
dinâmico será obtida considerando dois pêndulos simples.
2.1
O modelo do sistema sem restrições ao movimento
Conforme a Figura 2.1, pode-se verificar as caracterı́sticas do modelo mecânico considerado. Todas as massas foram consideradas como pontuais e concentradas nos seus
respectivos centros de massa. Na Lista de Sı́mbolos foram identificadas todos os parâmetros do sistema mostrado na Figura 2.1. O caso de estudo do sistema apresentado neste
trabalho é de total simetria. Considera-se um ângulo positivo no sentido anti-horário e
negativo no sentido horário.
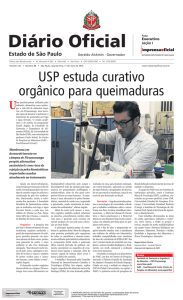
Para começar a análise do sistema é necessário dividir o problema em antes e depois do
impacto, na Figura 2.2 mostra-se um diagrama exemplo de possibilidade de impacto do
sistema, no qual os pêndulos iniciam seus movimentos em condições iniciais simétricas em
relação ao eixo vertical e as massas m1 e m2 estão em repouso. Considere-se que as setas
indicam o tendência de movimento das respectivas massas antes e depois do impacto.
Na Tabela 2.1 são mostradas as possibilidades de impacto que dividem o problema em
antes e depois do impacto. Essa tabela foi obtida considerando o sistema sem o controlador de força, as condições para que ocorra cada um dos casos depende necessariamente
da variação da quantidade de movimento antes e depois do impacto e do coeficiente de
restituição. Neste trabalho considerou-se na simulação o coeficiente de restituição igual
a zero, ou seja uma colisão perfeitamente ineslástica, assim durante o contato os corpos
seguem na direção do movimento dos pêndulos. No momento do impacto os centros das
massas estão alinhandos com o centro de massa dos pêndulos. Assim o movimento ocorre
na horizontal sem que ocorra movimento de rotação nas massas.
8
y
d
1111111111111111111111111111111
0000000000000000000000000000000
L3
Lcm3
L4
cm3
x
Lcm4
cm4
mb3
d1
d2
mb4
θ3
θ4
k
m3
m1
m2
m4
c
O1
L1
O2
x1
L2
x2
Figura 2.1: Detalhes do modelo mecânico considerado.
Tabela 2.1: Possibilidades de Impacto do caso simétrico.
m3
Antes do impacto
m1
m2
repouso
m4
repouso
9
Depois do impacto
m3
m1
m2
m4
Antes
Depois
m3
k
m1
m2
m4
c
m3
k
m1
m4
m2
c
m3
repouso
repouso
k
m1
m2
m4
c
Figura 2.2: Exemplo de possibilidade de impacto.
2.1.1
Equações governantes do primeiro pêndulo
A energia cinética do primeiro pêndulo é dada pela equação(2.2).
1
1
1
2
T = Ib3cm θ˙3 + m3 |~r˙ 3 |2 + mb3 |~r˙ cm3 |2
2
2
2
(2.2)
onde o termo Ib3cm representa o momento de inercia da barra em torno do centro de
massa, θ3 representa o deslocamento angular da barra, mb3 representa a massa da barra
e m3 representa a massa na ponta do primeiro pêndulo. O vetor ~rcm3 representa o vetor
posição do centro de massa da barra, o vetor ~r3 representa o vetor posição da massa na
ponta da haste. O módulo do vetor ~r3 pode ser escrito conforme a equação (2.3).
~r3 = L3 senθ3~i + L3 cosθ3~j
~r˙3 = L3 senθ3 θ˙3~i + L3 cosθ3 θ˙3~j
2
2
|~r˙3 |2 = L2 sen2 θ3 θ˙3 + L2 cos2 θ3 θ˙3
3
3
2
|~r˙3 |2 = L23 θ˙3 (sen2 θ3 + cos2 θ3 )
2
|~r˙3 |2 = L23 θ˙3
O módulo do vetor ~rcm3 pode ser escrito conforme a equação (2.4).
10
(2.3)
~rcm3 = Lcm3 senθ3~i + Lcm3 cosθ3~j
~r˙cm3 = Lcm3 senθ3 θ˙3~i + Lcm3 cosθ3 θ˙3~j
2
2
|~r˙cm3 |2 = L2cm3 sen2 θ3 θ˙3 + L2cm3 cos2 θ3 θ˙3
2
|~r˙cm3 |2 = L2 θ˙3 (sen2 θ3 + cos2 θ3 )
cm3
2
|~r˙cm3 |2 = L2cm3 θ˙3
(2.4)
Dessa forma, substituindo (2.4) e (2.3) em (2.2), obtém-se a equação da energia cinética
do primeiro pêndulo conforme a equação (2.4).
1
1
1
2
2
2
(2.5)
T = Ib3cm θ˙3 + mb3 L2cm3 θ˙3 + m3 L23 θ˙3
2
2
2
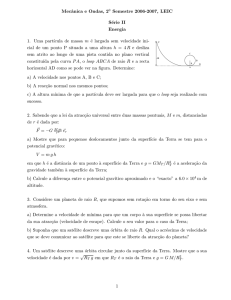
Para determinar a energia potencial, considera-se a Figura 2.3, mostrando a relação
de h1 e da mesma forma obtém-se h3 em relação ao centro de massa de m3 .
y
τ1
x
Lcm3 cos(θ3)
Lcm3
mb3
h3
h1
θ3
m3
Figura 2.3: Detalhes do primeiro pêndulo, mostrando como obter h1 , para obter h3 é considerado o
mesmo procedimento.
Conforme a Figura 2.3 pode-se verificar a relação de h1 e da mesma forma é considerado
para obter h3 , conforme as equações dadas em (2.6).
11
h1 = Lcm3 − Lcm3 cosθ3
h1 = Lcm3 (1 − cosθ3 )
h3 = L3 − L3 cosθ3
h3 = L3 (1 − cosθ3 )
(2.6)
onde a energia potencial para o primeiro pêndulo é dada pela equação (2.7).
V = m3 gh3 + mb3 gh1
(2.7)
Dessa forma, substituindo h1 e h3 na equação (2.7) temos que V é dado pela equação
(2.8).
V = m3 g(L3 (1 − cosθ3 )) + mb3 g(Lcm3 (1 − cosθ3 ))
(2.8)
Organizando a equação, resulta em (2.9).
V = m3 gL3 − m3 gL3 cosθ3 + mb3 gLcm3 − mb3 gLcm3 cosθ3
(2.9)
O Lagrangiano do sistema é dado pela equação (2.10).
L=T −V
(2.10)
Substituindo as equações (2.6) e (2.9), obtém-se a equação (2.11).
L =
1
1
1
2
2
2
Ib3cm θ˙3 + mb3 L2cm3 θ˙3 + m3 L23 θ˙3
2
2
2
−m3 gL3 + m3 gL3 cosθ3 − mb3 gLcm3 + mb3 gLcm3 cosθ3
(2.11)
A equação de Lagrange associada ao primeiro pêndulo é dada por (2.12).
d
dt
∂L
∂ θ̇3
−
∂L
= τ1
∂θ3
(2.12)
Substituindo o valor do Lagrangiano na equação (2.13), onde τ1 representa o torque
associado ao primeiro pêndulo.
12
∂L
= θ̇3 Ib3cm + mb3 L2cm3 + m3 L23
∂ θ̇3
d ∂L
= θ̈3 Ib3cm + mb3 L2cm3 + m3 L23
dt ∂ θ̇3
∂L
= −m3 gL3 senθ3 − mb3 gLcm3 senθ3
∂θ3
(2.13)
Resolvendo as derivadas em relação a θ3 , obtemos a equação dinâmica do primeiro
pêndulo dada por0 (2.14).
θ̈3 Ib3cm + mb3 L2cm3 + m3 L23 + m3 gL3 senθ3 + mb3 gLcm3 senθ3 = τ1
(2.14)
Isolando θ̈3 na equação (2.14), obtém-se a equação (2.15).
θ̈3 =
2.1.2
1
(τ1 − m3 gL3 senθ3 − mb3 gLcm3 senθ3 )
(Ib3cm + mb3 L2cm3 + m3 L23 )
(2.15)
Equações governantes do segundo pêndulo
A energia cinética do segundo pêndulo é dada pela equação (2.16).
1
1
1
2
T = Ib4cm θ˙4 + m4 |~r˙ 4 |2 + mb4 |~r˙ cm4 |2
2
2
2
(2.16)
onde o termo Ib4cm representa o momento de inércia da barra em torno do centro de
massa, θ4 representa o deslocamento angular da barra, mb4 representa a massa da barra
e m4 representa a massa na ponta do segundo pêndulo. O vetor ~rcm4 representa o vetor
posição localizado no centro de massa da barra, o vetor ~r4 representa o vetor posição
localizado na massa na ponta da haste. O módulo do vetor ~r4 pode ser escrito conforme
a equação (2.17).
13
~r4 = L4 senθ4~i + L4 cosθ4~j
~r˙4 = L4 senθ4 θ˙4~i + L4 cosθ4 θ˙4~j
2
2
|~r˙4 |2 = L24 sen2 θ4 θ˙4 + L24 cos2 θ4 θ˙4
2
|~r˙4 |2 = L2 θ˙4 (sen2 θ4 + cos2 θ4 )
4
2
|~r˙4 |2 = L24 θ˙4
(2.17)
O módulo do vetor ~rcm4 pode ser escrito conforme a equação (2.18).
~rcm4 = Lcm4 senθ4~i + Lcm4 cosθ4~j
~r˙cm4 = Lcm4 senθ4 θ˙4~i + Lcm4 cosθ4 θ˙4~j
2
2
|~r˙cm4 |2 = L2 sen2 θ4 θ˙4 + L2 cos2 θ4 θ˙4
cm4
|~r˙cm4 | =
|~r˙cm4 |2 =
2
cm4
2
L2cm4 θ˙4 (sen2 θ4
2
L2cm4 θ˙4
+ cos2 θ4 )
(2.18)
Dessa forma, obtém-se a equação da energia cinética do segundo pêndulo conforme a
equação (2.19).
1
1
1
2
2
2
(2.19)
T = Ib4cm θ˙4 + mb4 L2cm4 θ˙4 + m4 L24 θ˙4
2
2
2
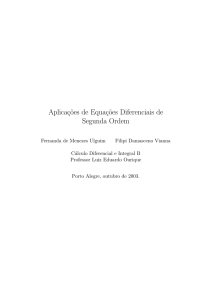
Para determinar a energia potencial considera-se a Figura 2.4.
Pela Figura 2.4 podemos determinar o valor de h2 e h4 , conforme as equações dadas
em (2.20).
h2 = Lcm4 − Lcm4 cosθ4
h2 = Lcm4 (1 − cosθ4 )
h4 = L4 − L4 cosθ4
h4 = L4 (1 − cosθ4 )
(2.20)
onde a energia potencial é dada pela equação (2.21).
V = m4 gh4 + mb4 gh2
(2.21)
Substituindo h1 e h2 na equação (2.20), assim temos que V é dado pela equação (2.22).
V = m4 g(L4 (1 − cosθ4 )) + mb4 g(Lcm4 (1 − cosθ4 ))
14
(2.22)
y
τ2
d
x
Lcm4 cos(θ4)
Lcm4
mb4
h4
h2
θ4
m4
Figura 2.4: Detalhes do segundo pêndulo.
O que resulta na seguinte equação (2.23).
V = m4 gL4 − m4 gL4 cosθ4 + mb4 gLcm4 − mb4 gLcm4 cosθ4
(2.23)
Dessa forma o Lagrangiano do sistema é dado pela equação (2.24).
L=T −V
(2.24)
Substituindo as equações (2.19) e (2.23), obtém-se a equação (2.25).
L =
1
1
1
2
2
2
Ib4cm θ˙4 + mb4 L2cm4 θ˙4 + m4 L24 θ˙4
2
2
2
−m4 gL4 + m4 gL4 cosθ4 − mb4 gLcm4 + mb4 gLcm4 cosθ4 )
(2.25)
A equação de Lagrange do segundo pêndulo é dado por (2.26).
d
dt
∂L
∂ θ̇4
−
∂L
= τ2
∂θ4
Substituindo o valor do Lagrangiano na equação (2.27).
15
(2.26)
∂L
= θ̇4 Ib4cm + mb4 L2cm4 + m4 L24
∂ θ̇4
d ∂L
= θ̈4 Ib4cm + mb4 L2cm4 + m4 L24
dt ∂ θ̇4
∂L
= −m4 gL4 senθ4 − mb4 gLcm4 senθ4
∂θ4
(2.27)
O que resulta na equação dinâmica do segundo pêndulo, dada pela equação (2.28).
θ̈4 Ib4cm + mb4 L2cm4 + m4 L24 + m4 gL4 senθ4 + mb4 gLcm4 senθ4 = τ2
(2.28)
Isolando θ̈4 na equação (2.28), obtém-se a equação (2.29).
θ̈4 =
2.1.3
1
(τ2 − m4 gL4 senθ4 − mb4 gLcm4 senθ4 )
(Ib4cm + mb4 L2cm4 + m4 L24 )
(2.29)
Equações governantes das massas compliantes
Para obter as equações dos blocos considera-se o vetor rm1 que representa a posição do
centro de massa associado a massa 1 e rm2 é o vetor posição que representa a posição
do centro de associado a massa 2. As equações (2.30) e (2.31) mostram os detalhes dos
respectivos vetores rm1 e rm2 .
~rm1 = (L1 + x1 )~i
~r˙m1 = ẋ1~i
|~r˙ m1 |2 = x˙1 2
(2.30)
~rm2 = (L2 + x2 )~i
~r˙m2 = ẋ2~i
|~r˙ m2 |2 = x˙2 2
A energia cinética associada as massas m1 e m2 é dada pela equação (2.32).
16
(2.31)
1
1
T = m1 x˙1 2 + m2 x˙2 2
2
2
A energia potencial das massas m1 e m2 é dada pela equação (2.33).
(2.32)
1
(2.33)
V = kω (x2 − x1 )2
2
A função de Rayleigh devido a dissipação de energia do amortecedor é dada pela
equação (2.34).
1
B(|~r˙m1 | − |~r˙m2 |)2
2
1
R =
B(|x˙1 | − |x˙ 2 |)2
2
R =
(2.34)
Usando as equações (2.32) e (2.33), respectivamente a energia cinética e a energia
potencial, obtém-se a equação (2.35).
1
1
1
(2.35)
L = m1 x˙1 2 + m2 x˙2 2 − kω (x2 − x1 )2
2
2
2
Usando as equações de Euler-Lagrange em relação a variável x1 , dada pela equação
(2.36).
d
dt
∂L
∂ ẋ1
−
∂L
∂R
+
=0
∂x1 ∂ ẋ1
(2.36)
Substituindo o Lagrangiano apresentado em (2.35) na equação (2.36) obtém-se a equação de Euler-Lagrange de movimento para a massa m1 , dada por
m1 ẍ1 + kω (x1 − x2 ) + B(ẋ1 − ẋ2 ) = 0
(2.37)
Usando as equações de Euler-Lagrange em relação a variável x2 , dada pela equação
(2.38).
d ∂L
∂L
∂R
−
+
=0
(2.38)
dt ∂ ẋ2
∂x2 ∂ ẋ2
Substituindo o Lagrangiano apresentada em (2.35) na equação (2.38), obtém-se a
equação de Euler-Lagrange do movimento para a massa m2 , dada por
m2 ẍ2 + kω (x2 − x1 ) + B(ẋ2 − ẋ1 ) = 0
(2.39)
Assim as equações do Sistema Livre(sem contato), são dadas pela equações em (2.40).
17
0 = m1 ẍ1 + kω (x1 − x2 ) + B(ẋ1 − ẋ2 )
0 = m2 ẍ2 + kω (x2 − x1 ) + B(ẋ2 − ẋ1 )
τ1 = θ˙3 (Ibcm3 + m3 L3 2 + mb3 L2 ) + m3 gL3 sen(θ3 ) + mb3 gLcm3 sen(θ3 )
cm3
τ2 = θ˙4 (Ibcm4 + m4 L4 + mb4 L2cm4 ) + m4 gL4 sen(θ4 ) + mb4 gLcm4 sen(θ4 ) (2.40)
2
Isolando θ3 , θ4 , x1 e x2 , obtemos que as equações dinâmicas do Sistema Livre(sem
contato), são dadas pela equações em (2.42).
1
(τ1 − m3 gL3 senθ3 − mb3 gLcm3 senθ3 )
(Ib3cm + mb3 L2cm3 + m3 L23 )
1
=
(τ2 − m4 gL4 senθ4 − mb4 gLcm4 senθ4 )
(Ib4cm + mb4 L2cm4 + m4 L24 )
B
kω
(ẋ1 − ẋ2 )
= − (x1 − x2 ) −
m1
m1
kω
B
= − (x2 − x1 ) −
(ẋ2 − ẋ1 )
m2
m2
θ̈3 =
θ̈4
ẍ1
ẍ2
2.2
(2.41)
O modelo do sistema com restrições ao movimento
O contato é um termo mais ambı́guo, embora seja muitas vezes usado como sinônimo
de impacto em geral, o contato normalmente é um processo contı́nuo que ocorre durante
um tempo finito, nesse momento surgem forças internas, essas forças internas podem
ser determinadas através do uso dos multiplicadores de lagrange, para que a modelagem
matemática é necessário considerar os vı́nculos de restrição do sistema as massas m1
e m2 representação uma restrição ao movimento dos pêndulos. Considerando a Figura
2.5 é possı́vel verificar o evento do contato entre as massas e os pêndulos. Os ângulos
mostrados θ3 e θ4 apresentam respectivamente, valores positivos(sentido horário) e valores
negativos(sentido anti-horário).
2.2.1
As equações do vı́nculo e os multiplicadores de Lagrange
Os vı́nculos do sistema são as restrições ao movimento dos pêndulos, essas restrições são
geradas pelas massas m1 e m2 . Usando uma relação trigonométrica, as equações que
representam esses vı́nculos são dadas por (2.42). As equações obtidas são dadas por
(2.42). O ângulo θ3 é considerando positivo e o ângulo θ4 é considerado negativo.
18
y
d
1111111111111111111111111111111
0000000000000000000000000000000
L3
L4
Lcm4
Lcm3
cm3
x
cm4
mb3
mb4
θ3
θ4
k
m3
m2 m4
m1
c
O1
O2
L1
x1
L2
x2
Figura 2.5: Detalhes do sistema em contato, a distância entre os pêndulos e as massas é igual a zero.
d1 = x1 + L1 − L3 senθ3
d2 = d − x2 − L2 + L4 senθ4
(2.42)
Essas equações são obtidas a partir da Figura 2.5, onde d1 e d2 representam respectivamente as distâncias entre as massa m1 e massa da haste m3 e a massa m2 e massa
da haste m4 . Conforme pode ser verificado na Figura 2.5, no momento do contato as
distâncias d1 e d2 são iguais a zero, o que caracteriza o contato com as massas. Dessa
forma, podemos escrever as equações igualando d1 e d2 a zero (2.43).
0 = x1 + L1 − L3 senθ3
0 = d − x2 − L2 + L4 senθ4
(2.43)
Isolando as variáveis de estado x1 e x2 , obtém-se as equações (2.44)
x1 = −L1 + L3 senθ3
x2 = d − L2 + L4 senθ4
(2.44)
Quando existe o contato dos pêndulos com as massas o deslocamento das massas
m1 e m2 esta acoplado ao deslocamento dos pêndulos de tal forma que variação de x1
19
e a variação de x2 correspondem ao deslocamento linear dos pêndulos. Além disso, a
velocidade e aceleração podem ser utilizadas.
Assim temos que as derivadas dos vı́nculos para o primeiro pêndulo são dadas por
(2.45).
ẋ1 = θ̇3 L3 cosθ3
2
ẍ1 = θ̈3 L3 cosθ3 − θ˙3 L3 senθ3
(2.45)
Assim temos que as derivadas dos vı́nculos para o segundo pêndulo são dadas por
(2.46).
ẋ2 = θ̇4 L4 cosθ4
2
ẍ2 = θ̈4 L4 cosθ4 − θ˙4 L4 senθ4
(2.46)
Para o sistema em contato a equação da energia cinética é dada pela equação (2.47).
T =
1
1
1
2
2
2
Ib3cm θ˙3 + mb3 L2cm3 θ˙3 + mb3 L23 θ˙3
2
2
2
1
1
1
1
1
2
2
2
+ Ib4cm θ˙4 + mb4 L2cm4 θ˙4 + m4 L24 θ˙4 + m1 x˙1 2 + m2 x˙2 2
2
2
2
2
2
(2.47)
Para o sistema em contato a equação da energia potencial é dada pela equação (2.48).
V
1
kω (x2 − x1 )2 + m3 gL3 (1 − cosθ3 ) + mb3 gLcm3 (1 − cosθ3 )
2
+ m4 gL4 (1 − cosθ4 ) + mb4 gLcm4 (1 − cosθ4 )
=
(2.48)
O Lagrangiano do sistema é reescrito considerando os vı́nculos do sistema (MEIROVITCH, 2010), os multiplicadores de Lagrange são dados por λ1 e λ2 , são as forças de
contato respectivas as massa 1 com o primeiro pêndulo e a massa 2 com o segundo pêndulo.
A equação (2.49) mostra o novo Lagrangiano do sistema em contato.
L = T − V + λ1 d1 + λ2 d2
(2.49)
Substituindo as equações (2.45),(2.46),(2.47) e (2.48) em (2.49) obtém-se a equação
dada em (2.50).
20
L =
1
1
1
1
1
2
2
2
2
2
Ib3cm θ˙3 + mb3 L2cm3 θ˙3 + m3 L23 θ˙3 + Ib4cm θ˙4 + mb4 L2cm4 θ˙4
2
2
2
2
2
1
1
1
1
2
kω (x1 − x2 )2 + m3 gL3 (1 − cosθ3 )
+ m4 L24 θ˙4 + m1 x˙1 2 + m2 x˙2 2 −
2
2
2
2
+mb3 gLcm3 (1 − cosθ3 ) + m4 gL4 (1 − cosθ4 ) + mb4 gLcm4 (1 − cosθ4 ))
+λ1 (x1 + L1 − L3 sen(θ3 )) + λ2 (d − x2 − L2 + L4 senθ4 )
(2.50)
Quando ocorre o contato, aparecem as forças internas entre os pêndulos e as massas,
a equação de Euler-Lagrange é reescrita igualando a λ1 , conforme a equação em (2.51).
d
dt
∂L
∂ ẋ1
−
∂L
∂R
+
=0
∂x1 ∂ ẋ1
(2.51)
Usando a equação (2.50), as derivadas parciais são calculadas, conforme as equações
em (2.52).
∂L
∂ ẋ1
d ∂L
dt ∂ ẋ1
∂L
∂x1
∂R
∂ ẋ1
= m1 ẋ1
= m1 ẍ1
= kω (x2 − x1 ) + λ1
= −B(ẋ2 − ẋ1 )
(2.52)
Substituindo (2.52) na equação dada em (2.51). Assim obtém-se λ1 , conforme a equação em (2.53).
m1 ẍ1 + kω (x1 − x2 ) + B(ẋ1 − ẋ2 ) = λ1
(2.53)
Para x2 , usando as equação em (2.50), obtém-se (2.54).
d
dt
∂L
∂ ẋ2
−
∂L
∂R
+
=0
∂x2 ∂ ẋ2
(2.54)
Usando a equação (2.50), as derivadas parciais são calculadas, conforme as equações
em (2.54).
21
∂L
∂ ẋ2
d ∂L
dt ∂ ẋ2
∂L
∂x2
∂R
∂ ẋ2
= m2 ẋ2
= m2 ẍ2
= −kω (x2 − x1 ) − λ2
= B(ẋ2 − ẋ1 )
(2.55)
Substituindo (2.55) na equação dada em (2.54). Assim obtém-se λ2 , conforme a equação em (2.56).
m2 ẍ2 + kω (x2 − x1 ) + B(ẋ2 − ẋ1 ) = −λ2
(2.56)
Para θ3 , usando as equação em (2.50), Obtém-se a equação (2.57).
d
dt
∂L
∂ θ̇3
−
∂L
∂R
= τ1
+
∂θ3 ∂ θ̇3
(2.57)
Usando a equação (2.50), as derivadas parciais são calculadas, conforme as equações
em (2.58).
∂L
= θ̇3 Ib3cm + mb3 L2cm3 + m3 L23
∂ θ̇3
d ∂L
= θ̈3 Ib3cm + mb3 L2cm3 + m3 L23
dt ∂ θ̇3
∂L
= −m3 gL3 senθ3 − mb3 gLcm3 senθ3 − λ1 L3 cosθ3
∂θ3
(2.58)
Substituindo (2.58) na equação dada em (2.57). Assim obtém-se τ1 , conforme a equação em (2.59).
θ̈3 Ib3cm + mb3 L2cm3 + m3 L23 + m3 gL3 senθ3 + mb3 gLcm3 senθ3 + λ1 L3 cosθ3 = τ1 (2.59)
Considerando os termos compostos pelas massas, para reduzir o tamanho das equações,
considerando J3 e M3 conforme as equações em (2.60)
J3 = Ib3cm + mb3 L2cm3 + m3 L23
M3 = m3 gL3 + mb3 gLcm3
22
(2.60)
Assim temos que a equação (2.59) pode ser reescrita conforme a equação dada em
(2.61).
J3 θ¨3 + M3 senθ3 = τ1 − λ1 L3 cosθ3
(2.61)
O mesmo procedimento é feito para obter a equação dinâmica para o segundo pêndulo.
Assim o Lagrangiano é escrito conforme a equação (2.62) em relação a θ4 .
d
dt
∂L
∂ θ̇4
−
∂L
∂R
+
= τ2
∂θ4 ∂ θ̇4
(2.62)
As derivadas parciais são dadas pelas equações em (2.63).
∂L
= θ̇4 Ib4cm + mb4 L2cm4 + m4 L24
∂ θ̇4
d ∂L
= θ̈4 Ib4cm + mb4 L2cm4 + m4 L24
dt ∂ θ̇4
∂L
= −m4 gL4 senθ4 − mb4 gLcm4 senθ4 + λ2 L4 cosθ4
∂θ4
(2.63)
Substituindo (2.63) na equação dada em (2.62). Assim obtém-se τ1 , conforme a equação em (2.64).
θ̈4 Ib4cm + mb4 L2cm4 + m4 L24 + m4 gL4 senθ4 + mb4 gLcm4 senθ4 − λ2 L4 cosθ4 = τ2 (2.64)
Considerando;
J4 = Ib4cm + mb4 L2cm4 + m4 L24
M4 = m4 gL4 + mb4 gLcm4
(2.65)
Considerando os termos compostos pelas massas, para reduzir o tamanho das equações,
considerando J4 e M4 conforme as equações em (2.66).
J4 θ¨4 + M4 senθ4 = τ2 + λ2 L4 cosθ4
(2.66)
Assim, temos que o sistema de equações quando ocorre o contato é dado pelas seguintes
equações em (2.67).
23
λ1 = m1 ẍ1 + kω (x1 − x2 ) + B(ẋ1 − ẋ2 )
−λ2 = m2 ẍ2 + kω (x2 − x1 ) + B(ẋ2 − ẋ1 )
J3 θ¨3 + M3 senθ3 = τ1 − λ1 L3 cosθ3
J4 θ¨4 + M4 senθ4 = τ2 + λ2 L4 cosθ4
(2.67)
Substituindo a equação (2.53) na equação (2.61), obtém-se a equação dada em (2.68).
J3 θ¨3 + M3 senθ3 = τ1 − (m1 ẍ1 + kω (x1 − x2 ) + B(ẋ1 − ẋ2 ))L3 cosθ3
(2.68)
Substituindo as equações dadas em (2.44),(2.45) e (2.46), ou seja os vı́nculos e as suas
respectivas derivadas de primeira e segunda ordem, obtém-se a equação dada em (2.69).
2
J3 θ¨3 + M3 senθ3 = τ1 − (m1 (θ̈3 L3 cosθ3 − θ˙3 L3 senθ3 ) + kω (−L1 +
L3 senθ3 − d + L2 − L4 senθ4 )) + B((θ̇3 L3 cosθ3 ) − (θ̇4 L4 cosθ4 ))L3 cosθ3 (2.69)
Reorganizado a equação (2.69), obtém-se (2.70).
J3 θ¨3 + M3 senθ3 = τ1 − m1 θ̈3 L23 cos2 θ3 + m1 θ̇32 L23 senθ3 cosθ3
−kω L23 cosθ3 senθ3 + kω L1 L3 cosθ3 + kω dL3 cosθ3 − kω L2 L3 cosθ3 +
kω L4 L3 senθ4 cosθ3 − B θ̇3 L2 cos2 θ3 + B θ˙4 L4 L3 cosθ3 cosθ4
3
(2.70)
Isolando θ¨3 na equação (2.70) obtém-se a equação dada em (2.71).
1
τ1 − M3 senθ3 + m1 θ̇32 L23 senθ3 cosθ3
(J3 + m1 L23 cos2 θ3 )
−kω L23 cosθ3 senθ3 + kω L1 L3 cosθ3 + kω dL3 cosθ3
θ¨3 =
−kω L2 L3 cosθ3 + kω L4 L3 senθ4 cosθ3 − B θ̇3 L23 cos2 θ3
+B θ˙4 L4 L3 cosθ3 cosθ4
(2.71)
Dessa forma λ1 pode ser reescrito conforme a equação dada em (2.72).
2
λ1 = m1 (θ̈3 L3 cosθ3 − θ˙3 L3 senθ3 ) + kω ((−L1 + L3 senθ3 ) −
(d − L2 + L4 senθ4 )) + B(θ̇3 L3 cosθ3 − θ̇4 L4 cosθ4 )
24
(2.72)
Substituindo a equação (2.71) na equação (2.72). Dessa forma, obtém-se a força normal
entre o primeiro pêndulo e massa 1 conforme a equação (2.73).
1
τ1 − M3 senθ3 + m1 θ̇32 L23 senθ3 cosθ3 −
= m1
J3 + m1 L23 cos2 θ3
kω L23 cosθ3 senθ3 + kω L1 L3 cosθ3 + kω dL3 cosθ3 − kω L2 L3 cosθ3
λ1
+kω L4 L3 senθ4 cosθ3 − B θ̇3 L23 cos2 θ3 +
2
B θ˙4 L4 L3 cosθ3 cosθ4 L3 cosθ3 − θ˙3 L3 senθ3 + kω ((−L1 + L3 senθ3 )
−(d − L2 + L4 senθ4 )) + B(θ̇3 L3 cosθ3 − θ̇4 L4 cosθ4 )
(2.73)
Considerado a equação dada em (2.66) e substituindo o a equação dada em (2.56),
assim obtém-se a equação dada em (2.74).
J4 θ¨4 + M4 senθ4 = τ2 − (m2 ẍ2 + kω (x2 − x1 ) + B(ẋ2 − ẋ1 ))L4 cosθ4
(2.74)
Usando os vı́nculos e as suas derivadas primeira e segunda ordem, obtém-se a equação
dada em (2.75).
2
J4 θ¨4 + M4 senθ4 = τ2 − [m2 (θ̈4 L4 cosθ4 − θ˙4 L4 senθ4 ) + kω (d − L2 +
L4 senθ4 − L3 senθ3 + L1 ) + B(θ̇4 L4 cosθ4 − θ̇3 L3 cosθ3 )]L4 cosθ4
(2.75)
Reorganizado a equação dada em (2.75), obtém-se a equação (2.76).
J4 θ¨4 + M4 senθ4 = τ2 − m2 θ¨4 L24 cos2 θ4 + m2 θ̇42 L24 senθ4 cosθ4 − kω L24 cosθ4 senθ4
+kω L2 L4 cosθ4 − kω dL4 cosθ4 − kω L1 L4 cosθ4 + kω L4 L3 senθ3 cosθ4
−B θ̇4 L2 cos2 θ4 + B θ˙4 L4 L3 cosθ3 cosθ4
4
(2.76)
Isolando θ¨4 na equação (2.76) obtém-se a equação dada em (2.77).
1
τ2 − M4 senθ4 + m2 θ̇42 L24 senθ4 cosθ4
(J4 + m2 L24 cos2 θ4 )
−kω dL4 cosθ4 + kω L2 L4 cosθ4 − kω L24 cosθ4 senθ4 +
θ¨4 =
kω L4 L3 senθ3 cosθ4 − kω L1 L4 cosθ4 −
25
B θ̇4 L24 cos2 θ4
˙
+ B θ3 L4 L3 cosθ3 cosθ4 (2.77)
Dessa forma λ2 pode ser reescrito conforme a equação dada em (2.78).
2
λ2 = −m2 (θ̈4 L4 cosθ4 − θ˙4 L4 senθ4 ) − kω (d − L2 + L4 senθ4
−L3 senθ3 + L1 ) − B(θ̇4 L4 cosθ4 − θ̇3 L3 cosθ3 )
(2.78)
Substituindo a equação dada em (2.77) na equação (2.78). Dessa forma, obtém-se a
força normal entre o segundo pêndulo e massa 2 conforme a equação dada em (2.79).
1
τ2 − M4 senθ4 + m2 θ̇42 L24 senθ4 cosθ4 − kω dL4 cosθ4
= −m2
J4 + m2 L24 cos2 θ4
+kω L2 L4 cosθ4 − kω L24 cosθ4 senθ4 + kω L4 L3 senθ3 cosθ4 − kω L1 L4 cosθ4
2
2
2
−B θ̇4 L4 cos θ4 + B θ˙3 L4 L3 cosθ3 cosθ4 L4 cosθ4 − θ˙4 L4 senθ4
λ2
−kω (d − L2 + L4 senθ4 − L3 senθ3 + L1 ) − B(θ̇4 L4 cosθ4 − θ̇3 L3 cosθ3 )
2.2.2
(2.79)
Cálculo das velocidades após o impacto
O coeficiente de restituição na direção x é dado pela equação (2.80).
(veloc. massa 1 depois contato - veloc. massa 2 e da haste depois contato)
(veloc. massa 1 antes contato - veloc. massa 2 e da haste antes contato)
(2.80)
No momento do impacto ocorre não linearidades ao sistema, devido o surgimento de
valores elevados de força durante um curto intervalo de tempo, assim após o impacto é
necessário corrigir as velocidades, usando o Impulso que é igual a variação da quantidade
de movimento antes e depois do impacto, o coeficiente de restituição define o tipo de
choque, neste caso considerando o coeficiente de restituição igual zero temos que o choque é
do tipo perfeitamente inelástico (FENILI; SCHAEFER, 2007). Dessa forma, o coeficiente
de restituição é dado pela equação (2.81).
x = −
depois
depois
x˙1 depois − (vm3x
+ vb3x
)
x = −
antes
antes
x˙1 antes − (vm3x
+ vb3x
)
(2.81)
Na equação (2.81), a velocidade depois é dada pela soma das velocidades da haste do
pêndulo com a velocidade da massa na ponta da haste.
considerando x = 0, tem-se que a equação dada em (2.81), resulta na equação (2.82).
depois
depois
x˙1 depois − (vm3x
+ vb3x
)
=0
x = −
antes
antes
x˙1 antes − (vm3x
+ vb3x
)
26
(2.82)
Para a massa na haste do pêndulo a sua velocidade pode ser decomposta em termos
das suas componentes em vm3x e vm3y , conforme as equações dada em (2.83).
vb3x = θ˙3 Lcm3 cosθ3
vb3y = θ˙3 Lcm3 senθ3
(2.83)
Para a massa 3 presa na haste do primeiro pêndulo temos que as velocidades decompostas
são dadas por 2.84
vm3x = θ˙3 L3 cosθ3
vm3y = θ˙3 L3 senθ3
(2.84)
Dessa forma, a velocidade da massa 1 é obtido pela equação (2.82). Conforme a
equação (2.85).
depois
depois
+ vb3x
x˙1 depois = (vm3x
)
y
Ax3
τ1
(2.85)
x
Lcm3
Ay3
cm3
mb3
m1
Py3
Px3
m3
Px3
Fw 1
Py3
Figura 2.6: Diagrama de forças envolvidas para o primeiro pêndulo com a interação com a massa 1.
Considerando o diagrama dos momentos envolvidos conforme mostrado na Figura 2.6,
a variação da quantidade de movimento da massa 1 é dada pela seguinte equação (2.86).
m1 x˙1 depois − m1 x˙1 antes = Px3
27
(2.86)
Quando o primeiro pêndulo entra em contato com a massa 1 existe uma reação na
barra devido a interação, conforme pode ser verificado pela equação 2.87
depois
depois
antes
antes
− m3 vm3x
− mb3 vb3x
= Ax3 − Px3
m3 vm3x
+ mb3 vb3x
(2.87)
depois
depois
Onde vb3x
representa a velocidade da haste após o impacto e vm3x
representa a
velocidade da massa 3 na direção x após o impacto.
Somando as equações (2.87) e (2.86), temos que Ax3 é dado pela equação (2.88).
depois
depois
antes
antes
− (m3 vm3x
+ mb3 vb3x
) = Ax3
+ mb3 vb3x
m1 x˙1 depois − m1 x˙1 antes + m3 vm3x
(2.88)
A equação (2.89) será usada para calcular as novas velocidades após o impacto. Na
modelagem matemática do sistema, considerou-se cada pêndulo separadamente de modo
a obter os multiplicadores de Lagrange. Usando a variação da quantidade de Impulso.
Impulso = ∆ Quantidade de movimento Linear, tem-se;
depois
x˙1 depois = (L3 + Lcm3 )cosθ3 θ˙3
(2.89)
O torque associado ao primeiro pêndulo τ1 e a força Fω são mostrados na Figura 2.6.
O sistema é considerado sem atrito de tal forma que Py3 = 0, da onde segue que Ay3 = 0.
Px3 é a quantidade movimento associada ao primeiro pêndulo na direção e Ax é quantidade
de movimento devido a reação do apoio.
De acordo com a Figura 2.6 a quantidade de movimento associada a massa 1 é dada
pela equação(2.90).
m1 x˙1 depois − m1 x˙1 antes = Px3
(2.90)
Considerando a diferença em relação ao apoio do primeiro pêndulo, temos que na
direção x, usando a equação (2.86) e a equação (2.90) obtemos (2.91).
depois
depois
antes
antes
m3 vm3x
+ mb3 vb3x
− (mb3 vb3x
− mb3 vb3x
) = Ax3 − Px3
(2.91)
Conforme pode ser verificado na Figura 2.7 do centro de massa do primeiro pêndulo e
do centro de massa da haste do primeiro pêndulo, temos que as suas velocidades podem
ser decompostas em termos das suas componentes em vb3x e vb3y , conforme a equação
(2.83).
Usando a equação dada em (2.90) e somando com a equação dada em ((2.91), dessa
forma obtemos a equação (2.92).
depois
depois
antes
m3 vm3x
+ mb3 vb3x
− mb3 vb3x
− m1 x˙1 depois − m1 x˙1 antes = Ax3
28
(2.92)
y
τ1
x
vb3Y
θ̇3 Lcm3
v b3
θ3
θ3
vb3X
cm3
vm3Y
θ̇3 L3
v m3
m3
θ3
vm3X
Figura 2.7: Representação das componentes das velocidades do primeiro pêndulo.
Usando o fato que o impulso angular corresponde a variação da quantidade de movimento angular, conforme a equação (2.93).
depois
antes
Ibcm3 θ˙3
− Ibcm3 θ˙3
= −Ax3 cosθ3 Lcm3 − Px3 cosθ3 (L − Lcm3 )
(2.93)
Substituindo (2.91) e (2.92) em (2.93), obtemos a equação dada em (2.94).
depois
antes
depois
depois
˙
˙
+ mb3 vb3x
)
Ibcm3 θ3
− Ibcm3 θ3
= − m1 x˙1 depois − m1 x˙1 antes + (m3 vm3x
antes
antes
−(m3 vm3x + mb3 vb3x ) cosθ3 Lcm3 − (m1 x˙1 depois − m1 x˙1 antes cosθ3 (L − Lcm3 )
(2.94)
Lembrando que as velocidades na ponta da haste é dada pela equação (2.84).
Substituindo (2.91) em (2.94), obtém-se (2.95).
depois
Ibcm3 θ˙3
− Ibcm3 θ˙3
= − m1 x˙1 depois − m1 x˙1 antes + (m3 θ˙3
Lcosθ3 ) +
depois
antes
antes
mb3 θ˙3
Lcm3 cosθ3 ) − (m3 θ˙3
Lcosθ3 + mb3 θ˙3
Lcm3 cosθ3 ) cosθ3 Lcm3
depois
antes
−(m1 x˙1 depois − m1 x˙1 antes )cosθ3 (L − Lcm3 )
De tal forma que esta expressão pode ser reescrita conforme a equação (2.96).
29
(2.95)
depois
=
(Ibcm3 + (L3 Lcm3 m3 + mb3 L2cm3 )cos2 θ3 )θ˙3
+ m1 L3 cosθ3 ẋdepois
1
antes
(Ibcm3 + (L3 Lcm3 m3 + mb3 L2 )cos2 θ3 )θ˙3
+ m1 L3 cosθ3 ẋantes
cm3
1
(2.96)
Isolando x˙1 depois na equação (2.96). Esta expressão pode ser reescrita conforme a
equação (2.97)
depois
depois
+ m1 L3 cosθ3 (L3 + Lcm3 )cosθ3 θ˙3
(Ibcm3 + (L3 Lcm3 m3 + mb3 L2cm3 )cos2 θ3 )θ˙3
antes
(2.97)
+ m1 L3 cosθ3 ẋantes
= (Ibcm3 + (L3 Lcm3 m3 + mb3 L2 )cos2 θ3 )θ˙3
1
cm3
Eliminando os termos iguais da (2.97), obtém-se a equação (2.98).
depois
(Ibcm3 + (L3 Lcm3 m3 + mb3 L2cm3 )cos2 θ3 )θ˙3
+ m1 L3 cosθ3 ẋdepois
1
antes
= (Ibcm3 + (L3 Lcm3 m3 + mb3 L2 )cos2 θ3 )θ˙3
+ m1 L3 cosθ3 ẋantes
cm3
1
(2.98)
depois
Isolando o valor θ˙3
, obtemos a equação dada em (2.99).
antes
(Ibcm3 + (L3 Lcm3 m3 + mb3 L2cm3 )cos2 θ3 )θ˙3
+ m1 L3 cosθ3 ẋantes
depois
1
˙
θ3
=
2
2
2
(Ibcm3 + (L3 Lcm3 m3 + mb3 Lcm3 )cos θ3 + m1 L3 cosθ3 (L3 + Lcm3 )
(2.99)
Para o cálculo das novas velocidades para o segundo pêndulo considera-se o mesmo
procedimento feito anteriormente, a Figura 2.8 mostra os detalhes do diagrama de forças.
No centro de massa do segundo pêndulo temos que a sua velocidade pode ser decomposta em termos das suas componentes em vb4x e vb4y , conforme a equação dada em
(2.100)
vb4x = θ˙4 Lcm4 cosθ4
vb4y = θ˙4 Lcm4 senθ4
(2.100)
Para a massa na haste do pêndulo a sua velocidade pode ser decomposta em termos
das suas componentes em vm4x e vm4y , conforme as equações dada em (2.101).
vm4x = θ˙4 L4 cosθ4
vm4y = θ˙4 L4 senθ4
30
(2.101)
τ2
y
d
Ax4
x
Lcm4
Ay4
cm4
m2
mb4
θ4
Py4
Fw 2
Px4
Py4
m4
Px4
Figura 2.8: Diagrama de forças envolvidas para o segundo pêndulo com a interação com a massa 2.
A equação da reação de apoio é dada por (2.102).
depois
depois
antes
m4 vm4x
+ mb4 vb4x
− mb4 vb4x
− m2 x˙2 depois − m2 x˙2 antes = Ax4
(2.102)
Usando o fato que o impulso angular corresponde a variação da quantidade de movimento angular.
Ibcm4 θ˙4
depois
− Ibcm4 θ˙4
antes
= −Ax4 cosθ4 Lcm4 − Px4 cosθ4 (L − Lcm4 )
(2.103)
Substituindo o resultado de (2.102) em (2.103), temos (2.104).
depois
antes
depois
depois
˙
˙
Ibcm4 θ4
− Ibcm4 θ4
= − m2 x˙2 depois − m2 x˙2 antes + (m4 vm4x
+ mb4 vb4x
)
antes
antes
−(m4 vm4x + mb4 vb4x ) cosθ4 Lcm4 − (m2 x˙2 depois − m2 x˙2 antes cosθ4 (L − Lcm4 )
(2.104)
Lembrando que as velocidades na ponta da haste é dada pela equação (2.100).
Substituindo (2.100) em (2.104), obtém-se (2.105).
31
depois
antes
depois
˙
˙
Ibcm4 θ4
− Ibcm4 θ4
= − m2 x˙2 depois − m2 x˙2 antes + (m4 θ˙4
Lcosθ4 ) +
antes
depois
antes
˙
˙
˙
mb4 θ4
Lcm4 cosθ4 ) − (m4 θ4
Lcosθ4 + mb4 θ4
Lcm4 cosθ4 ) cosθ4 Lcm4
−(m2 x˙2 depois − m2 x˙2 antes )cosθ4 (L − Lcm4 )
(2.105)
De tal forma que esta expressão pode ser reescrita conforme a equação (2.106).
depois
(Ibcm4 + (L4 Lcm4 m4 + mb4 L2cm4 )cos2 θ4 )θ˙4
+ m2 L4 cosθ4 ẋdepois
=
1
antes
(Ibcm4 + (L4 Lcm4 m4 + mb4 L2cm4 )cos2 θ4 )θ˙4
+ m2 L4 cosθ4 ẋantes
(2.106)
2
Isolando x˙2 depois na equação (2.106). Esta expressão pode ser reescrita conforme a
equação (2.107)
depois
depois
(Ibcm4 + (L4 Lcm4 m4 + mb4 L2cm4 )cos2 θ4 )θ˙4
+ m1 L4 cosθ4 (L4 + Lcm4 )cosθ4 θ˙4
antes
= (Ibcm4 + (L4 Lcm4 m4 + mb4 L2 )cos2 θ4 )θ˙4
+ m2 L4 cosθ4 ẋantes
(2.107)
cm4
2
Eliminando os termos iguais da (2.107), obtém-se a equação (2.108).
depois
(Ibcm4 + (L4 Lcm4 m4 + mb4 L2cm4 )cos2 θ4 )θ˙4
+ m2 L4 cosθ4 ẋdepois
=
2
antes
Ibcm4 + (L4 Lcm4 m4 + mb4 L2cm4 )cos2 θ4 )θ˙4
+ m2 L4 cosθ4 ẋantes
(2.108)
2
depois
Isolando o valor θ˙4
, obtemos a equação dada em (2.109).
antes
(Ibcm4 + (L4 Lcm4 m4 + mb4 L2cm4 )cos2 θ4 )θ˙4
+ m2 L4 cosθ4 ẋantes
depois
2
˙
θ4
=
(Ibcm4 + (L4 Lcm4 m4 + mb4 L2cm4 )cos2 θ4 + m2 L4 cosθ4 2 (L4 + Lcm4 )
32
(2.109)
3
Controle de força explı́cito
A análise do controle de força durante a Transição de Contato em manipuladores robóticos é tipicamente o controlador de força quem atua sobre o sistema. Em geral, estes
controladores não estão preparados para lidar nem com os impactos nem com as perdas de
contato que acontecem durante a fase de pré-transição, mas mesmo assim, são usados na
prática (AVILES; SIMANCA; CALLE, 2005; KO; LIN; CHEN, 2013; TAVARES, 2012).
De fato, deseja-se que esta fase seja ultrapassada e que pouco tempo depois o manipulador
estará exercendo forças de maneira estável e com os valores desejados. Isso normalmente
acontece mas o desempenho durante a fase crı́tica pode ser muito deficiente. Devido a
isso, percebe-se a importância e a necessidade de estudar a dinâmica do processo de transição sob controladores de força para assim poder identificar os fatores que influenciam
no desempenho do controlador, mais ainda quando na literatura não existe uma análise
deste tipo.
Neste capı́tulo, essa análise é feita usando o modelo mecânico proposto no capı́tulo 2,
o objetivo e obter um controle de força que irá atuar durante o contato com as massas,
essa força é definida a partir de um valor de referência de forme que o controlador deverá
garantir esse valor.
A execução de tarefas em robótica não inclui somente o movimento da extremidade do
manipulador através de uma trajetória especı́fica desejada, mas também a interação do
manipulador com um meio de trabalho. Durante a execução de tarefas do segundo tipo,
altos valores de forças de contato são em geral indesejáveis já que estas podem causar
dano estrutural tanto no manipulador como no meio que se faz contato. Por outro lado,
valores de forças de contato abaixo de certo limites também são indesejadas pois pode
evitar a que execução da tarefa seja satisfatória ou causar a perda contato diante de algum
distúrbio externo. Portanto, pode-se concluir que durante a interação é necessária uma
estratégia adequada para controlar a força de contato.
Talvez a primeira estratégia que se pode pensar é continuar usando um controle de
posição da extremidade durante a interação do manipulador com o meio e assim desta maneira controlar implicitamente o valor das forças de contato. No entanto, isto requereria
33
que a trajetória da extremidade do manipulador fosse planejada com altı́ssima precisão.
Além disso, o sistema de controle deveria garantir que o erro de posicionamento da extremidade fosse o menor possı́vel ao longo da trajetória planejada. Seria necessário então se
ter um modelo detalhado de ambos, do manipulador (cinemática e dinâmica) e do meio
de trabalho (caracterı́sticas mecânicas e geometria)(INGAR, 2004). No caso de manipuladores rı́gidos, o modelo pode ser conhecido com precisão suficiente, mas na prática, uma
descrição detalhada do meio seria difı́cil de se ter.
A ocorrência inevitável de erros de planejamento poderia fazer que a trajetória de
referência especificada não fosse mais a adequada para a execução satisfatória da tarefa.
Além disso, já que o manipulador estaria governado por algoritmos baseados somente em
posição, qualquer desvio da Controle de impacto em manipuladores robóticos trajetória
real em relação à trajetória de referência provocaria uma reação em termos de forças
de contato(TANNER; KYRIAKOPOULOS, 2001). Quanto maior a rigidez do meio de
trabalho, maior seria a possibilidade de um contato instável, pois neste caso pequenos
desvios da trajetória planejada originariam grandes desvios nas forças de interação. Estas
desvantagens do controle baseado puramente em posição, limitam a sua aplicação prática.
3.1
Controle de força explicito
Controle de força direta opera em um erro de força entre o desejado e os valores medidos e pretende ter um valor constante da força de contato. Capacidades de controle
de movimento nas direções tarefa sem restrições são recuperado usando uma composição
paralela das ações de controle da força e movimento. Isto é desejável, a fim de realizar
um comportamento compatı́vel apenas ao longo destas instruções de tarefas que são realmente restringidos pela presença do meio ambiente(ZENG; HEMAMI, 1997). O controle
de força explicito pode ser descrito como segue a Figura 3.1.
No sistema de controle descrito na Figura 3.1, G(s) representa o manipulador, H(s) é
o controlador de realimentação, R(s) é a função de transferência e L(s) pode ser um filtro
para o sinal de força medido. Temos ainda fed como a força de contato de referencia, fu é
a foca de controle, fe é a força de contato real e ef é o erro entre a força de contato real
e o desejado.
fu = H(s)ef + R(s)fed
(3.1)
ef = fed − L(s)ef
(3.2)
Tomando o controlador H(s) constante, concluem-se a seguinte lei de controle
fu = Kpf (fed − fe )
34
(3.3)
Compensação do
efeito da gravidade
pêndulo 1
fe
Kd1
+
−
Fref 1
e1
Fref 2
e2
+
−
Kp1
Kp2
J1t
+
J2t
+
θ3
θ̇3
+ −
τu1
Modelo dinâmico
da planta no
espaço de estados
τu2
+ −
Kd2
fe
θ̇4
Compensação do
efeito da gravidade
pêndulo 2
θ4
Figura 3.1: Diagrama de Blocos do Controle Explicito de Força.
Com o intuito de melhorar o desempenho do controlador pode-se adicionar um termo
derivativo ao termo Kpf , assim a equação do sistema com o termo derivativo fica,
fu = [Kpf + sKdf ](fed − fe )
(3.4)
Entretanto o sinal de força medida está sempre sujeita a ruı́dos portanto uma boa alternativa para reduzi-lo é utilizar um filtro passa-baixas eliminando assim as componentes
de altas frequências e somente depois deriva-lo, então escolhendo um
H(s) = Kpf + sKdf
R(s) = 0
L(s) = I(a/(s + a))
fu = [Kpf
a
d
fe
+ sKdf ] fe −
a+s
(3.5)
(3.6)
onde Kdf é o ganho derivativo e a é a frequência de corte.Outra alternativa é pela derivada
das velocidades do manipulador, nesse caso a lei de controle pode ser definida pela equação
(3.7)
35
M ẍ + [B + Kv ]ẋ + fe = Kpf (fed − fe ) − Kd θ˙3
(3.7)
Essa lei de controle é definida como o Controle explicito de força com Ganho Proporcional e Alimentação Direta Unitária. Vale ainda mencionar que para esse caso o torque
nas juntas do manipulador fica conforme as equações dinâmicas do sistema com contato
dadas pelas equações (3.8) e (3.9).
m3
τ1 − M3 senθ3 + m1 θ̇32 L23 senθ3 cosθ3 −
= L3 cosθ3 Kp1 (Fref 1 −
(J3 + m1 L23 cos2 θ3 )
kω L23 cosθ3 senθ3 + kω L1 L3 cosθ3 + kω dL3 cosθ3 − kω L2 L3 cosθ3 +
2
2
˙
kω L4 L3 senθ4 cosθ3 − B θ̇3 L3 cos θ3 + B θ4 L4 L3 cosθ3 cosθ4 ) + Fref 1 − Kd1 θ˙3
τu1
+mb3 gLcm3 senθ3 + m3 gL3 senθ3
τu2
(3.8)
= L4 cos(θ4 ) Kp2 (Fref 2 −
m4
τ2 − M4 senθ4 + m2 θ̇42 L24 senθ4 cosθ4 −
2
2
(J4 + m2 L4 cos θ4 )
kω dL4 cosθ4 + kω L2 L4 cosθ4 − kω L24 cosθ4 senθ4 + kω L4 L3 senθ3 cosθ4 −
2
2
˙
kω L1 L4 cosθ4 − B θ̇4 L4 cos θ4 + B θ3 L4 L3 cosθ3 cosθ4 ) + Fref 2 − Kd2 θ˙4
+mb4 gLcm4 senθ4 + m4 gL4 senθ4
(3.9)
As leis de controle pode ser escrita conforme as equações (3.10) e (3.11).
τu1 = J1t [kp1 (fed1 − fe ) + fed1 ] − kv1 q̇
(3.10)
τu2 = J2t [kp2 (fed2 − fe ) + fed2 ] − kv2 q̇
(3.11)
onde fed1 e fed2 são as forças normais definidas pelos multiplicadores de lagrange.
3.2
Lei de Controle
A Figura 3.2 mostra os detalhes das forças associadas ao primeiro pêndulo, a lei de controle
deve compensar o efeito da gravidade.
A lei de controle calculada para o primeiro pêndulo é dada pela equação (3.12).
τu1 = L3 cosθ3 [(kp1 (Fref 1 − fe ) + Fref 1 )] − kd1 θ˙3 + mb3 gLcm3 senθ3 + m3 gL3 senθ3 (3.12)
36
y
τ1
x
Lcm3
θ3
cm3
mb3 g sin(θ3 )
λ1 cos(θ3 )
θ3
mb3 g
θ3
m3
m3 g sin(θ3 )
λ1
θ3
λ1 sin(θ3 )
m3 g
Figura 3.2: Detalhes do primeiro pêndulo com o diagrama de forças. O lei de controle
deve eliminar o efeito da gravidade.
A Figura 3.3 mostra os detalhes das forças que o controle deve compensar.
y
τ2
d
x
Lcm4
θ4
cm4
mb4 g sin(θ4 )
λ2 cos(θ4 )
θ4
θ4
λ2
m4
mb4 g
m4 g sin(θ4 )
λ2 sin(θ4 )
θ4
m4 g
Figura 3.3: Detalhes do segundo pêndulo com o diagrama de forças envolvidas. A lei de
controle deve eliminar o efeito da gravidade
A lei de controle calculada para o segundo pêndulo é dada pela equação (3.13).
τu2 = L4 cosθ4 [(kp2 (Fref 2 + fe ) + Fref 2 )] − kd2 θ˙4 + mb4 gLcm4 senθ4 + m4 gL4 senθ4 (3.13)
37
A execução satisfatória de tarefas que envolvem interação requer a medição explı́cita
das forças de contato e o seu uso na estratégia de controle. A estratégia de controle que
usa a medição da força de contato na fase de interação é chamada de Controle Explı́cito de
Força. Existe também uma outra estratégia de controle para a fase de interação que não
regula diretamente a força de contato, mas sim a impedância mecânica entre a força e a
posição da extremidade. Esta estratégia é chamada de Controle de Impedância (HOGAN,
1985).
3.3
Controle de Força e a constante elástica da mola
A lei de controle investigada aqui, possui uma limitação relacionada com a constante de
elasticidade da mola. Devido aos parâmetros do pêndulo serem fixos, ou seja, o comprimento da haste do pêndulo não se altera, a força gerada pela mola é proporcional ao
deslocamento das massas. Como o sistema é simétrico e os pêndulos possuem um comprimento limitado a força na mola fica limitada pelo deslocamento das massas. Assim, a
máxima força de referência que o controlador poderá atingir está relacionada a um determinado valor para a constante da mola. Quando aumentado o valor da constante da mola,
o controlador alterará o valor de força de referencia. Um forma de contornar essa situação
consistem em considerar o pêndulo com uma haste telescópica. Uma outra possibilidade
consiste em considerar o pêndulo com haste deslizante.
38
4
Simulação Numérica
4.1
Implementação do integrador numérico
O integrador numérico utilizado é um Runge-Kutta de quarta ordem, com o passo definido
com o valor de 0, 0001. A Figura 4.1 mostra os detalhes do procedimento do programa e
como o integrador foi considerado. No inicio do programa o sistema esta livre, integra-se
nesse momento as equações do sistema livre, utilizando o Runge-Kutta de quarta ordem,
o sistema evolui com o tempo de tal forma que a distância entre as massas e os pêndulos
vai para zero, nesse momento o ocorre o impacto, sendo necessário o calculo das novas
velocidades, que são condições iniciais para o sistema em contato. Em seguida é verificado
os valores das forças de contato, com o intuito de certificar a continuidade do contato,
caso o contato não exista o programa volta para a condição inicial sem contato em um
loop. Mais detalhes sobre o integrador verificar o programa disponı́vel no apêndice.
A sequencia a seguir, representa os passos necessários para a integração numérica do
conjunto completo das equações governantes (de contato e sem contato), considerando
que o sistema comece parte da condição de não-contato:
Passo 1- Integrar as Equações obtidas em (2.42), e verificar as distâncias, d1 e d2 , que
são respectivamente as distâncias entre o primeiro pêndulo e a massa 1 e entre o
segundo pêndulo e a massa 2. Quando d1 e d2 são iguais a zero as condições de
contato foram alcançadas.
Passo 2- Na transição entre o não-contato e o contato: as novas velocidades dos corpos
depois do ”impacto” devem ser calculadas considerando o coeficiente de restituição.
Neste caso, as equações consideradas são as equações dadas em (2.99) e em (2.109).
Assim calcula-se os valores de θ˙3 e θ˙4 .
Passo 3- Com as novas velocidades dadas como no passo 2 e as condições iniciais (em
conjunto com os valores das posições como calculado pelo último passo da integração), integrar as equações dadas em (2.74) e (2.79), em seguida verifica-se as forças
de contato entre os pêndulos e as massas. Quando as forças de contato são iguais a
39
zero os corpos são separados e assim o sistema volta para a condição dada no Passo
1.
Sistema sem contato
Integrador numérico RK4,
Eq. (2.43)
distância
kd1 k > 0
kd2 k > 0
kd1 k < 0
kd2 k < 0
Sistema com contato
Calcular novas velocidades
Integrador numérico RK4
Eqs. (2.69), (2.73), (2.74),
(2.79) e (2.81)
Calcular λ1 e λ2
λ1 < 0
λ2 < 0
λ1 > 0
λ2 > 0
Forças
Figura 4.1: Fluxograma da rotina do programa.
4.2
Simulação numérica do sistema
A Tabela 4.1 apresenta os valores dos parâmetros do sistema considerados para as simulações do sistema sem controle.
4.2.1
Simulação do sistema sem controle
A Figura 4.2 e a Figura 4.3 mostram os detalhes do deslocamento angular do primeiro
pêndulo e do segundo pêndulo, neste caso o sistema não possui nenhum controle, verifica-se
que o torque aplicado foi suficiente para os pêndulos realizarem múltiplas voltas.
A Figura 4.4 e a Figura 4.5 mostram os detalhes da velocidade angular do primeiro
pêndulo e do segundo pêndulo, neste caso o sistema não possui nenhum controle, verifica-se
que o torque aplicado foi suficiente para os pêndulos realizarem múltiplas voltas.
40
Tabela 4.1: Tabela com os valores dos parâmetros usados para simulação.
Paramentos utilizados para a simulação numérica
Wall mass
1Kg
Constante de Elasticidade da Mola
30 N / m
Constante do Amortecedor
5
Comprimento da Barra
1m
Valor do torque inicial
25 N.m
Valor da distancia entre os dois pêndulos ”d”
2.4 m
Posição inicial da massa 1 L1
0.6 m
Posição inicial da massa 2 L2
1.8 m
Comprimento da haste L3
1.0 m
Comprimento da haste L4
1.0 m
A Figura 4.6 e a Figura 4.7 mostram os detalhes do deslocamento linear das massas m1
e m2 , neste caso o sistema não possui nenhum controle, verifica-se que o torque aplicado
foi suficiente para os pêndulos realizarem múltiplas voltas.
A Figura 4.8 e a Figura 4.9 mostram os detalhes da velocidade linear da massa 1 e
da massa 2, neste caso o sistema não possui nenhum controle, verifica-se que o torque
aplicado foi suficiente para os pêndulos realizarem múltiplas voltas.
A Figura 4.10 e a Figura 4.11 mostram os detalhes da forças de contato entre a massa
1 e o primeiro pêndulo e massa 2 e o segundo pêndulo, neste caso o sistema não possui
nenhum controle, verifica-se a ocorrência de múltiplos impactos.
A Figura 4.12 e a Figura 4.13 mostram os detalhes da forças de contato entre a massa
1 e o primeiro pêndulo e massa 2 e o segundo pêndulo, neste caso o sistema não possui
nenhum controle, verifica-se a ocorrência de múltiplos impactos.
4.2.2
Simulação do sistema com controle
A Tabela 4.2 apresenta os valores dos parâmetros do sistema considerados para as simulações do sistema mecânico com controle.
A Figura 4.14 e a Figura 4.15 mostram os detalhes dos deslocamentos angulares do
primeiro pêndulo e do segundo pêndulo, neste caso o sistema possui o controle de força
explı́cito, verifica-se que o torque aplicado foi suficiente para os pêndulos realizarem múltiplas voltas.
A Figura 4.16 e a 4.17 mostram os detalhes dos deslocamentos das massa m1 e m2 , neste
caso o sistema possui o controle de força, verifica-se a ocorrência de múltiplos impactos.
A Figura 4.18 e a Figura 4.19 mostram os detalhes das velocidades das massas m1 e
m2 , neste caso o sistema não possui nenhum controle, verifica-se a ocorrência de múltiplos
impactos.
A Figura 4.20 e a Figura 4.21 mostram os detalhes da forças de contato entre a massa
1 e o primeiro pêndulo e massa 2 e o segundo pêndulo, neste caso o sistema não possui
41
DESLOCAMENTO ANGULAR 1
5000
4500
4000
3500
θ1 (º)
3000
2500
2000
1500
1000
500
0
0
1
2
3
4
5
time (s)
6
7
8
9
10
Figura 4.2: Deslocamento angular do primeiro pêndulo.
Tabela 4.2: Tabela com os valores dos parâmetros usados para simulação.
Paramentos utilizados para a simulação numérica
Massa m1
1Kg
Massa m2
1Kg
Constante de Elasticidade da Mola
30 N / m
Constante do Amortecedor
5 N s /m
Comprimento da Barra
1m
Força de referência para o controle
20 N
Valor do torque inicial
25 N.m
Valor da distancia entre os dois pêndulos ”d”
2.4 m
Posição inicial da massa 1 L1
0.6 m
Posição inicial da massa 2 L2
1.8 m
Comprimento da haste L3
1.0 m
Comprimento da haste L4
1.0 m
Valor do Kp1
0.05
Valor do Kp2
0.05
Valor do Kd1
5
Valor do Kd2
5
nenhum controle, verifica-se a ocorrência de múltiplos impactos.
A Figura 4.22 e a Figura 4.23 mostram os detalhes da forças de contato entre a massa
1 e o primeiro pêndulo e massa 2 e o segundo pêndulo, neste caso o sistema não possui
nenhum controle, verifica-se a ocorrência de múltiplos impactos.
Com o intuito de ajudar na analise e entendimento do problema proposto, assim como
42
DESLOCAMENTO ANGULAR 2
0
−500
−1000
−1500
θ2 (º)
−2000
−2500
−3000
−3500
−4000
−4500
−5000
0
1
2
3
4
5
time (s)
6
7
8
9
10
Figura 4.3: Deslocamento angular do segundo pêndulo.
as possı́veis soluções, montou-se uma animação para representar o sistema mecânico (os
pêndulos com as massas). A Figura 4.24 mostra os detalhes do simulação, elaborada no
Matlab.
Algumas considerações foram levantadas a respeito do comportamento do sistema
mecânico considerado conforme os dados apresentados na Tabela 2, variando os valores
dos ganhos Kp e Kd, a resposta do controlador é muito sensı́vel a esses valores, o tempo
de acomodação é sensı́vel ao valor do ganho Kd. Quanto maior o ganho kd melhor é o
tempo de acomodação do sistema, ou seja o sistema converge mais rápido para a condição
de regime.
O valor de força definido está relacionado com o valor da constante elastica da mola, já
que a força entre as massas depende do valor da constante adotada. Neste caso, o valor da
constante da mola multiplicado pelo deslocamento das massas, representa a força deseja
limite que o controlador conseguiram manter, ou seja a força fica saturada conforme o
valor da constante da mola.
Esse resultado mostra que para que se possa simular diferentes possibilidades é necessário alterar o valor da constante da mola, obtendo novos valores de força. Para um
manipulador fı́sico, essa compliância mecânica implica, que caso seja necessário agarrar
diferentes objetos é necessário atualizar o controlador com respectivo valor de força desejado. Uma maneira de resolver esse problema é propor que as distancias entre os pêndulos
seja variável ou acrescentar uma haste telescópica aos pêndulos.
43
VELOCIDADE ANGULAR 1
18
16
14
dθ1/dt (rad/s)
12
10
8
6
4
2
0
0
1
2
3
4
5
time (s)
6
7
8
9
10
Figura 4.4: Velocidade angular do primeiro pêndulo. Sistema sem controle de força.
VELOCIDADE ANGULAR 2
0
−2
−4
dθ2/dt (rad/s)
−6
−8
−10
−12
−14
−16
−18
0
1
2
3
4
5
time (s)
6
7
8
9
10
Figura 4.5: Velocidade angular do segundo pêndulo. Sistema sem controle de força.
44
DESLOCAMENTO DA MASSA 1
1.05
1
DISTÂNCIA MASSA 1 (m)
0.95
0.9
0.85
0.8
0.75
0.7
0.65
0.6
0.55
0
1
2
3
4
5
time (s)
6
7
8
9
10
8
9
10
Figura 4.6: Deslocamento da massa 1.
DESLOCAMENTO DA MASSA 2
1.85
1.8
DISTÂNCIA MASSA 2 (m)
1.75
1.7
1.65
1.6
1.55
1.5
1.45
1.4
1.35
0
1
2
3
4
5
time (s)
6
7
Figura 4.7: Deslocamento da massa 2.
45
VELOCIDADE DA MASSA 1
8
7
6
5
dx1/dt(m/s)
4
3
2
1
0
−1
−2
0
1
2
3
4
5
time (s)
6
7
8
9
10
Figura 4.8: Velocidade linear da massa 1. Sistema sem controle de força.
VELOCIDADE DA MASSA 2
2
1
0
−1
dx2/dt(m/s)
−2
−3
−4
−5
−6
−7
−8
0
1
2
3
4
5
time (s)
6
7
8
9
10
Figura 4.9: Velocidade linear da massa 2. Sistema sem controle de força.
46
FORÇA DE CONTATO 1
25
20
λ1 (N)
15
10
5
0
0
1
2
3
4
5
time (s)
6
7
8
9
10
Figura 4.10: Força normal de contato entre o primeiro pêndulo e massa 1. Sistema sem controle de
força.
FORÇA DE CONTATO 2
0
−5
λ2 (N)
−10
−15
−20
−25
0
1
2
3
4
5
time (s)
6
7
8
9
10
Figura 4.11: Força normal de contato entre o segundo pêndulo e massa 1. Sistema sem controle de
força.
47
FN1 (N): _____
distância 1 para o contato (m): −−−−−−−−−
Força 1 e a distância de contato 1
25
20
15
10
5
0
−5
0
2
4
time (s)
6
8
10
distância 2 para o contato (m): −−−−−−−−−
FN2 (N): _____
Figura 4.12: Força normal de contato entre o primeiro pêndulo e massa 1, e o valor da distancia entre
eles.Sistema sem controle de força.
Força 2 e a distancia de contato 2
5
0
−5
−10
−15
−20
−25
0
2
4
time (s)
6
8
10
Figura 4.13: Força normal de contato entre o primeiro pêndulo e massa 1, e o valor da distancia entre
eles.Sistema sem controle de força.
48
DESLOCAMENTO ANGULAR 1
1600
1400
1200
θ1
1000
800
600
400
200
0
0
5
10
15
20
25
time (s)
30
35
40
45
50
Figura 4.14: Deslocamento do primeiro pêndulo. Sistema com controle de Força.
DESLOCAMENTO ANGULAR 2
0
−200
−400
θ2
−600
−800
−1000
−1200
−1400
−1600
0
5
10
15
20
25
time (s)
30
35
40
45
50
Figura 4.15: Deslocamento do segundo pêndulo. Sistema com controle de Força.
49
DESLOCAMENTO DA MASSA 1
1
0.95
0.9
DISTÂNCIA 1
0.85
0.8
0.75
0.7
0.65
0.6
0.55
0
5
10
15
20
25
time (s)
30
35
40
45
50
Figura 4.16: Deslocamento da massa 1. Sistema com controle de Força.
DESLOCAMENTO DA MASSA 2
1.85
1.8
1.75
DISTÂNCIA 2
1.7
1.65
1.6
1.55
1.5
1.45
1.4
0
5
10
15
20
25
time (s)
30
35
40
45
Figura 4.17: Deslocamento da massa 2. Sistema com controle de Força.
50
50
VELOCIDADE DA MASSA 1
7
6
dx1/dt(m/s)=azul e dx2/dt(m/s)=vermelho
5
4
3
2
1
0
−1
−2
0
5
10
15
20
25
time (s)
30
35
40
45
50
Figura 4.18: Velocidade liner da massa 1. Sistema com controle de força.
VELOCIDADE DA MASSA 2
2
1
dx1/dt(m/s)=azul e dx2/dt(m/s)=vermelho
0
−1
−2
−3
−4
−5
−6
−7
0
5
10
15
20
25
time (s)
30
35
40
45
50
Figura 4.19: Velocidade liner da massa 2. Sistema com controle de força.
51
TORQUE DO PENDULO 1
25
20
TORQUE 1
15
10
5
0
−5
0
5
10
15
20
25
time (s)
30
35
40
45
50
Figura 4.20: Torque de controle calculado para o primeiro pêndulo. Sistema com controle de força.
TORQUE DO PENDULO 2
5
0
TORQUE 2
−5
−10
−15
−20
−25
0
5
10
15
20
25
time (s)
30
35
40
45
50
Figura 4.21: Torque de controle calculado para o segundo pêndulo. Sistema com controle de força.
52
FORÇA DE CONTATO
30
25
FORÇA NORMAL 1(N)
20
15
10
5
0
−5
0
5
10
15
20
25
time (s)
30
35
40
45
50
Figura 4.22: Força normal de contato entre o pêndulo 1 e massa 1. Sistema com controle de força.
FORÇA DE CONTATO
5
0
FORÇA NORMAL 2(N)
−5
−10
−15
−20
−25
−30
0
5
10
15
20
25
time (s)
30
35
40
45
50
Figura 4.23: Força normal de contato entre o pêndulo 2 e massa 2. Sistema com controle de força.
53
Figura 4.24: Detalhes da animação criada no Matlabr , sequência de figuras da animação
para a verificação dos resultados.
54
5
Conclusões e discussões
No mundo real, é muito comum encontrar sistemas mecânicos sujeitos a contatos e impactos com o meio ambiente ou com outros sistemas mecânicos. Estes são eventos altamente
não-lineares. Esta pesquisa é importante pois contribui para a modelagem de manipuladores robóticos que executam tarefas em ambientes que exigem interação com o meio ao
redor.
Nas simulações numéricas verifica-se o comportamento das velocidades das massas
envolvidas e os valores para as forças de contato. O conhecimento dessas forças de contato
são utilizadas com o objetivo de tentar controlar a força entre os corpos.
Um sistema dinâmico não linear consistindo de dois pêndulos simples com restrição
ao movimento foi modelado matematicamente utilizando a abordagem Lagrangiana e o
conceito de multiplicadores de Lagrange. Para o cálculo das velocidades pós-impacto
utilizou-se o diagrama de corpo livre e o conceito do coeficiente de restituição.
Os resultados para o sistema sem restrição ao movimento são conhecidos e as simulações numéricas utilizando o integrador Runge-Kutta de quarta ordem (passo 0.0001s)
apresentaram resultados satisfatórios. Mostrando que a modelagem matemática proposta
do sistema mecânico livre e em contato esta correto.
Uma animação foi feita com o objetivo de se verificar o comportamento do sistema
mecânico visualmente. Isto muito auxilia no entendimento do problema.
Para o problema com restrição ao movimento (problema com vı́nculo), quando as
distâncias entre a extremidade dos pêndulos e os anteparos tendem a zero, a força de
contato entre os corpos aumenta abruptamente (o que caracteriza o impacto/contato entre
os mesmos). Isto significa que dois conjuntos diferentes de equações governantes devem
ser numericamente integrados e a condição para a escolha de um ou de outro conjunto
está vinculada à distância zero (contato) ou à força zero (perda de contato). Quando em
contato, os dois corpos podem caminhar juntos por um intervalo de tempo. Isto reduz o
número de graus de liberdade do sistema e um dos conjuntos de equações possui menos
equações que o outro.
Os resultados acerca do controle de força entre os pêndulos e as massas compliantes
55
são satisfatórios. Os pêndulos interagem com as massas mantendo a força de contato
constante e igual ao valor desejado.
56
6
Trabalhos Futuros
Como proposta para trabalhos futuros, pode-se citar a modelagem para o sistema não
simétrico, propor um controle de força e verificar a sua robustez. Propor complicações
para o modelo mecânico como por exemplo considerar mais um grau de liberdade para os
pêndulos, e estabelecer novos vı́nculos de posição.
Usar recursos de animação, criando um cenário onde seja possı́vel visualizar o funcionamento mais detalhado do modelo. Pretende-se propor expansões ao modelo, como
por exemplo, acrescentar mais um pêndulo e tornar o modelo tridimensional. É possı́vel
modelar o sistema como composto por corpos rı́gidos ao invés de massas concentradas.
Outras estratégias de controle de força podem ser propostas, assim como modelos de força
de atrito.
Uma proposta interessante consiste em desenvolver um protótipo fı́sico para verificar
o funcionamento do efetuador garra e testar seu comportamento dinâmico e a robustez.
Pode-se também propor que a distância “d” entre os pêndulos seja variável ou que as
hastes dos pêndulos sejam telescópicas.
57
Referências Bibliográficas
ADAMS, R. J.; HANNAFORD, B. Stable haptic interaction with virtual environments.
IEEE Trans. on Robotics and Automation, USA, v.15, n.3, p.465–474,
Aug. 1999.
AVILES, O. F.; SIMANCA, P. L.; CALLE, G. Dedos para GRIPPERS Roboticos. Scientia et Technica Afto XI, Colômbia, v.1, n.27, p.97–102, 2005.
BRENDEL, L.; UNGER, T.; WOLF, D. E. Contact Dynamics for Beginners. In: HINRICHSEN, H.; WOLF, D. E. (Ed.). The Physics of Granular Media. Weinheim, FRG: Wiley-VCH Verlag GmbH & Co. KGaA, 2002. p.1–20.
BROGLIATO, B.; NICULESCU, S.; ORHANT, P. On the Control of Finite-Dimensional
Mechanical Systems with Unilateral Constraints. IEEE Transactions on Automatic Control, USA, v.42, n.2, p.200–215, Feb. 1997.
CIAVARELLA, M. Generalized cattaneo partial slip plane contact problem. I – Theory.
International Journal of Solids and Structures, USA, v.35, n.18, p.2349–
2362, June 1998.
DEDE, M. I. C.; OZGOREN, M. K. A New Approach for the Formulation of the Admittance and Hybrid Position/Force Control Schemes for Industrial Manipulators.
In: ROBOTICS & REMOTE SYSTEMS MTG. PROCEEDINGS, 10., Florida.
Proceedings of the 10th Robotics & Remote Systems Mtg., 2004. p.332–337.
ESCALONA, J. L.; MAYO, J. M.; DOMı́NGUEZ, J. A critical study of the use of the generalized impulse-momentum balance equations in flexible multibody systems.
Journal of Sound and Vibration, USA, v.217, n.3, p.523–545, Oct. 1998.
FENILI, A.; SCHAEFER, B. Contact Dynamics Investigations. 2007. Postdoctoral
Technical Report — Deutsches Zentrum fur Luft- und Raumfart/Institute of
Robotics and Mechatronics, Oberpfaffenhofen, Germany.
58
FERRETTI, G.; MAGNANI, G.; ROCCO, P. On the Stability of Integral Force Control
in Case of Contact With Stiff Surfaces. J. Dyn. Sys., Meas., Control, USA,
v.117, n.4, p.547–553, Dec. 1995.
FISHER, W. D.; MUJTABA, M. S. Hybrid Position/Force Control: A correct formulation. International Journal of Robotic Research, USA, v.11, n.4, p.299–
311, Aug. 1992.
GILARDI, G.; SHARF, I. Literature survey of contact dynamics modelling. Mechanism
and Machine Theory, USA, v.37, n.41, p.1–10, Oct. 2002.
GILARDI, G.; SHARF, I. Literature survey of contact dynamics modelling. Mechanism
and Machine Theory, [S.l.], v.37, p.1213–1239, 2002.
HOGAN, N. Impedance Control: an approach to manipulation: part 1-theory, part
2-implementation, part 3-aplications. Journal of Dynamical Systems Measurement and Control, USA, v.107, p.1–24, Mar. 1985.
INGAR, C. E. Controle de Impacto em manipuladores robóticos. 2004. Tese
(Doutorado em Engenharia Mecânica) — Pontifı́cia Universidade Católica, Rio
de Janeiro.
KIM, S. W. Contact Dynamics and Force Control of Flexible Multi-Body Systems. 1999. Tese (Doutorado em Ciência da Computação) — Department of
Mechanical Engineering, McGill University, Montreal.
KO, C.-H.; LIN, S.-H.; CHEN, J.-K. Motion planning of multifingered hand-arm system
with optimal grasping force. In: IEEE INTERNATIONAL SYMPOSIUM ON
NEXT-GENERATION ELECTRONICS (ISNE), Taiwan. Proceedings of the
IEEE International Symposium on Next-Generation Electronics (ISNE), 2013.
p.262–265.
KWAN, C. M.; YESILDIREK, A.; LEWIS, F. L. Robust force/motion control of constrained robots using neural network. Journal of Robotic Systems, USA,
v.16, n.12, p.697–714, Dec. 1999.
LIU, C. K. Synthesis of Interactive Hand Manipulation. In: ACM SIGGRAPH/EUROGRAPHICS SYMPOSIUM ON COMPUTER ANIMATION, 2008., Aire-laVille, Switzerland, Switzerland. Proceedings Eurographics Association, 2008.
p.163–171.
LIU, C. K.; HERTZMANN, A.; POPOVIĆ, Z. Learning Physics-Based Motion Style
with Nonlinear Inverse Optimization. ACM Trans. Graph., New York, NY,
USA, v.24, n.3, p.1071–1081, July 2005.
59
MAILAH, M.; RAHIM, N. I. A. Intelligent Active Force Control of a Robot Arm using
Fuzzy Logic. In: TENCON, Malaysia. Proceedings of TENCON, 2000. p.291–
296.
MARGARITU, D. B.; DIANCONESCU, C. I. Control Techniques for Impacting Flexible Systems. Archive of Applied Mechanics, USA, v.69, n.8, p.555–568,
Nov. 1999.
MEIROVITCH, L. Methods of Analytical Dynamics. USA: Dover Publications,
2010.
MILLER, R.; MICHEL, A. N. Ordinary Differential Equations. USA: Academic
Press, 1982.
PFEIFFER, F.; GLOCKER, C. Multibody Dynamics With Unilateral Contacts.
USA: Wiley-VCH, 1996.
RADJAI, F.; RICHEFEU, V. Contact dynamics as a nonsmooth discrete element
method. Mechanics of Materials, USA, v.41, n.6, p.715–728, June 2009.
SANCHEZ, O. F. A. Desenvolvimento de sistema de preensão para utilização
em dispositivos roboticos. 2008. Tese (Doutorado em Engenharia Mecânica)
— UNICAMP.
SCIAVICCO, L.; SICILIANO, B. Modeling and Control of Robot Manipulators.
USA: Mcgraw-Hill College, 1996.
SINNET, R. W.; ZHAO, H.; AMES, A. D. Simulating Prosthetic Devices with HumanInspired Hybrid Control. In: IEEE/RSJ INTERNATIONAL CONFERENCE
ON INTELLIGENT ROBOTS AND SYSTEMS (IROS), San Francisco, CA,
USA. Proceedings IEEE Publications, 2011. v.69, n.4, p.1723 – 1730.
TANNER, H. G.; KYRIAKOPOULOS, K. J. Position and Force Control by Reaction
Compensation. In: IEEE INTERNATIONAL CONFERENCE ROBOTICS
AND AUTOMATION, Seoul, Korea. Proceedings Kyung Hee Information
Printing Co.: Ltd., 2001. p.3926–3931.
TAVARES, H. M. Ensinamento Rápido de Manipuladores Industriais e Controlo
de Força em Operações de Polimento. 2012. Dissertação (Mestrado em
Engenharia Elétrica) — Faculdade de Engenharia da Universidade do Porto.
TONG, D. Classical Dynamics. UK: University of Cambridge, 2004-2005.
60
VALER, C. E. I. Desenvolvimento de sistema de preensão para utilização em
dispositivos roboticos. 2004. Tese (Doutorado em Engenharia Mecânica) —
Departamento de Engenharia Mecânica - PUC - Rio de Janeiro.
WEE, L. B.; WALKER, M. W. On the Dynamics of Contacts between Space Robots
and Configuration Control for Impact. IEEE Transactions on Robotics and
Automation, USA, v.9, n.5, p.581–591, Oct. 1993.
ZENG, G.; HEMAMI, A. An overview of robot force control. Robotica, New York, NY,
USA, v.15, n.5, p.473–482, Sept. 1997.
61