82
C APÍTULO 9
C INEMÁTICA DO M OVIMENTO E SPACIAL DE
C ORPOS R ÍGIDOS
O estudo da dinâmica do corpo rígido requer o conhecimento da aceleração
do centro de massa e das características cinemáticas do corpo denominadas
velocidade angular e aceleração angular, em cada instante. Neste capítulo serão
estudadas as propriedades cinemáticas dos movimentos espaciais de corpos rígidos.
Inicialmente são estudados movimentos em torno de um ponto fixo e em seguida
movimentos espaciais quaisquer.
9.1
S OMA DE R OTAÇÕES EM R ELAÇÃO A E IXOS NO E SPAÇO
A posição espacial de um corpo rígido pode ser definida por seis
coordenadas independentes, sendo bastante usadas três coordenadas de um ponto
qualquer deste corpo mais três coordenadas angulares. Estas últimas definem o que
chamaremos de atitude do corpo rígido. No caso dos movimentos planos, a atitude
é definida apenas por uma coordenada angular que pode ser tratada de forma
vetorial. No caso espacial deve-se tomar cuidado com as coordenada angulares,
pois a soma de ângulos de rotação em relação a eixos no espaço não obedece à
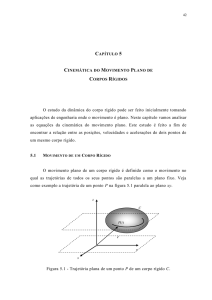
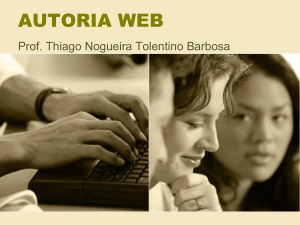
propriedade da comutatividade da soma vetorial. A Figura 9.1 mostra um exemplo
em duas situações: inicialmente dá-se uma rotação de 90 em torno do eixo x e em
seguida mais 90 em torno do eixo y. Na outra situação, partindo-se da mesma
posição inicial, dá-se inicialmente uma rotação de 90 em torno de y e em seguida
uma rotação de 90 em torno do eixo x. Observa-se que o resultado final é distinto
ao inverter-se a ordem da soma. Assim pode-se concluir no caso espacial que
83
θ1 θ2
θ2 θ1
(9.1)
1=90
y
z
2=90
x
y
x
1=90
y
2=90
x
Figura 9.1 - Soma de rotações de um corpo rígido.
Se fizermos estas duas somas com pequenas rotações
1
e
2,
as posições
finais obtidas também não serão iguais, mas estarão próximas. Por outro lado
considerando rotações infinitesimais d
1
e d 2 , a propriedade da comutatividade da
soma vetorial é restabelecida. Portanto, podemos escrever
dθ1 dθ2
dθ2 dθ1
(9.2)
Lembrando que a velocidade angular de um corpo é dada por
ω
dθ
dt
(9.3)
podemos derivar no tempo a (9.2) para obter
ω1 ω2
ω2 ω1
Pode-se concluir, portanto, que a velocidade angular se comporta como vetor.
(9.4)
84
9.2
M OVIMENTO EM TORNO DE UM PONTO FIXO
O movimento espacial de um corpo rígido pode ser analisado a partir da
composição de um movimento de translação espacial com um movimento de
rotação em torno de um ponto fixo. Neste item vamos analisar a questão do
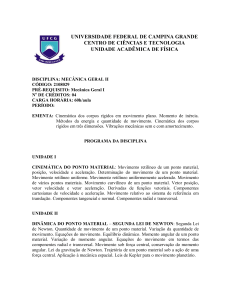
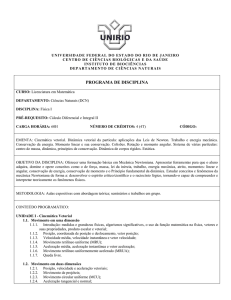
movimento de um corpo rígido em torno de um ponto fixo. Seja um corpo rígido C
que tem um ponto O fixo. A posição de qualquer outro ponto P num referencial
xyz, cuja origem está em O, é dada pelo vetor posição
r
(9.5)
r (t )
z
P
r
O
C
y
x
Figura 9.2 - Movimento em torno do ponto fixo O.
que é um vetor de módulo constante, sendo O e P pontos do corpo rígido C. Logo,
para obtermos a velocidade de P fazemos a derivada em t de r,
v
dr
dt
ω r
(9.6)
onde
ω é a velocidade angular do corpo no instante t.
Lembremos que a derivada em relação ao tempo de um vetor de módulo constante
é dada pelo produto vetorial (9.6) - ver Apêndice no final deste capítulo. Sendo O
um ponto fixo do corpo rígido, as trajetórias do ponto P estão localizadas sobre
uma superfície esférica de raio igual à distância entre O e P, ou seja, igual ao
módulo do vetor r.
85
A aceleração do ponto P é dada pela derivada no tempo da velocidade (9.6):
a
dv
dt
dω
dr
r ω
dt
dt
(9.7)
Aplicando (9.6) em (9.7), obtemos
a
α r ω (ω r )
(9.8)
onde
α
dω
é a aceleração angular do corpo no instante t.
dt
Um importante caso particular de movimento em torno de um ponto fixo
ocorre quando um determinado corpo tem velocidade angular ωP constante em
torno de um eixo do corpo e este eixo tem velocidade angular ωS constante em
torno de um referencial fixo. Neste caso a velocidade angular do corpo é igual a:
ω ωP ωS
(9.9)
E a aceleração angular pode ser obtida através de
α
dω
dt
dωP
dt
dωS
dt
(9.10)
Sendo ωP um vetor de módulo constante, com direção variável, e ωS um vetor
constante, então a segunda parcela é igual a zero e a primeira é dada por
α ωS ωP
(9.11)
onde foram aplicados novamente resultados mostrados no Apêndice deste capítulo
com relação à derivação de vetores em relação ao tempo.
86
9.3
M OVIMENTO G ERAL DE UM C ORPO R ÍGIDO
Conforme mencionado neste capítulo, o caso geral de movimentos espaciais
pode ser visto como uma composição de dois movimentos, sendo um de translação
e outro de rotação em torno de um ponto fixo. Vamos tomar o ponto A como
referência e seja B outro ponto qualquer do corpo rígido. A relação entre as
posições r A e r B desses dois pontos do corpo rígido é dada por
rB
(9.12)
rA rB / A
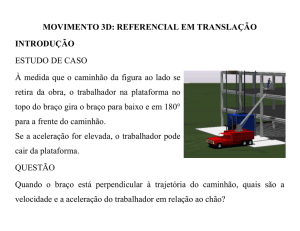
A figura 9.3 ilustra dois sistemas de referência utilizados para a análise do
movimento geral que faremos neste item. O sistema XYX é considerado o
referencial em relação ao qual se estuda o movimento do corpo rígido C, chamado
aqui de referencial fixo. O referencial xyz, chamado de referencial móvel, tem sua
origem fixa num ponto A do corpo rígido, mas mantém-se durante todo o
movimento em translação em relação ao fixo XYZ. Assim, seus eixos estão sempre
paralelos entre si, o que equivale a ambos terem seus versores iguais em qualquer
instante de tempo.
z
B
Z
rB/A
C
vA
Y
aA
X
A
y
x
Figura 9.3 - Movimento geral: referencial xyz em translação.
Derivando a (9.12) podemos relacionar as velocidades dos pontos A e B
vB
onde, neste caso
vA
drB / A
dt
(9.13)
87
drB / A
dt
vB / A
(9.14)
(vB ) xyz
corresponde à velocidade de B em relação ao referencial xyz, fixo no ponto A. O
movimento do corpo rígido em relação ao referencial xyz é um movimento de
rotação em relação a um ponto fixo, com velocidade angular
. Logo
ω rB / A
(9.15)
v A ω rB / A
(9.16)
(vB ) xyz
e
vB
Para se obter a relação entre as acelerações dos pontos A e B, derivamos a
equação (9.16)
dv B
dt
dv A
dt
drB / A
dω
rB / A ω
dt
dt
(9.17)
A partir dos resultados obtidos no item anterior, podemos escrever
aB
onde
aA α rB / A ω (ω rB / A )
(9.18)
é a aceleração angular do corpo rígido.
Assim, é possível obter a posição, a velocidade e a aceleração de um ponto
B qualquer de um corpo rígido a partir dos correspondentes valores de um ponto A,
cujo movimento seja dado. As equações (9.12), (9.15) e (9.18) expressam estas
relações para um movimento espacial qualquer. Podem ser aplicadas, é óbvio, para
os casos particulares de translação, onde os vetores velocidade angular e
aceleração angular são nulos mostrando que nestes casos as velocidades e as
acelerações de todos os pontos do corpo rígido são iguais em cada instante. Estas
equações também podem ser usadas para os movimentos de rotação em torno de
um ponto fixo em A. Nestes casos os vetores velocidade e aceleração deste ponto
são nulos e as equações resultantes repetem aquelas obtidas no item anterior.
Observemos que como os dois referenciais utilizados neste caso estão
sempre paralelos, todos os vetores podem ser escritos no referencial móvel xyz.
88
9.4
M OVIMENTO G ERAL E M OVIMENTO R ELATIVO
Em muitas situações conhece-se o movimento de um corpo rígido em
relação a outro corpo, representado por um referencial móvel xyz, e conhece-se o
movimento deste referencial móvel em relação a outro referencial fixo XYZ. Podese escrever para este caso que
rB
(9.19)
rA rB / A
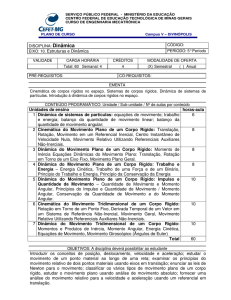
A figura 9.4 ilustra estes dois sistemas de referência. Vamos analisar o movimento
do corpo rígido C fazendo a composição a partir dos dados do movimento relativo
entre ambos os referenciais. A origem do referencial móvel xyz está num ponto A
qualquer não necessariamente pertencente ao corpo rígido C. Em muitas aplicações
este referencial representa outro corpo em relação ao qual se conhece o movimento
de C.
C
B
z
Z
rB/A
rB
y
Y
A
rA
X
x
Figura 9.4 - Movimento geral: referencial xyz em movimento qualquer.
Para obtermos a relação entre as velocidades de A e B, tomadas em relação
ao referencial XYZ, vamos derivar a (9.19)
vB
vA
drB / A
dt
Conforme mostrado no final deste capítulo, a derivada do vetor r B/A é igual a
(9.20)
89
drA / B
dt
onde
Ω rB / A
drA / B
dt
(9.21)
xyz
é a velocidade angular do referencial xyz em relação a XYZ. É importante
observar que neste caso
drB / A
dt
v B / xyz
(9.22)
vB / A
xyz
ou seja, é a velocidade de B em relação ao referencial xyz, de origem em A.
Substituindo (9.22) em (9.21) e, em seguida, o resultado em (9.20) obteremos
vB
v A Ω rB / A v B / A
(9.23)
onde são definidas as componentes da velocidade
vA
vB / A
Ω rB / A
velocidade de arraste
vB / xyz
velocidade de B relativa ao referencial móvel xyz
Para se obter a relação entre as acelerações dos pontos A e B, derivamos a
equação (9.23)
dv B
dt
dv A
dt
dΩ
rB / A
dt
Ω
drB / A
dt
dv B / A
dt
(9.24)
A partir dos resultados (9.21) e (9.22), podemos escrever
aB
onde
aA
dΩ
rB / A
dt
Ω ( Ω rB / A vB / A ) Ω vB / A
aB / A
(9.25)
dΩ
é a aceleração angular do referencial xyz em relação à XYZ. Portanto,
dt
agrupando de forma conveniente, escrevemos
aB
aA
dΩ
rB / A
dt
Ω ( Ω rB / A ) 2 Ω vB / A aB / A
(9.26)
90
onde são definidas as componentes de aceleração:
aA
dΩ
rB / A
dt
2Ω vB / A
aB / A
Ω ( Ω rB / A )
aceleração de arraste
aceleração de Coriolis ou complementar
aceleração de B relativa ao referencial móvel a xyz
Portanto, as equações (9.23) e (9.26) relacionam as velocidades e as
acelerações de dois pontos A e B, pertencentes a corpos rígidos distintos. Observe
que são iguais às equações gerais do movimento relativo para o caso de
movimentos planos, conforme já mostradas no Capítulo 5.
Assim, é possível obter a posição, a velocidade e a aceleração de um ponto
B qualquer de um corpo rígido a partir dos correspondentes valores de um ponto A,
cujo movimento seja dado. As equações (9.23) e (9.26) expressam estas relações
para um movimento espacial qualquer. Podem ser aplicadas, é óbvio, para o caso
particular no qual o ponto B está fixo no referencial xyz. Neste caso as equações
(9.23) e (9.26) tem apenas as parcelas de arraste não nulas, tanto para a velocidade
como para a aceleração, conforme mostrado no item 9.3.
9.5 Â NGULOS DE E ULER
Para definir a posição angular de um corpo rígido no espaço é usual utilizar
3 coordenadas da posição do centro de massa e 3 ângulos sequencialmente tomados
em relação a determinados referenciais móveis ou fixos. Um conjunto entre as
várias sequências para estes ângulos são os ângulos de Euler. Vamos de fini-los
com auxílio das Figuras 9.5. Sejam inicialmente coincidentes dois referenciais, um
fixo XYZ e um móvel xyz.
Conforme mostrado nas Figura 9.5, os ângulos de Euler, representados por
, θ e ψ são definidos através de 3 posições sucessivas do sistema móvel xyz. A
primeira posição é definida através do ângulo
de rotação em torno de Z levando o
referencial móvel à posição angular mostrada na Figura 9.5a como x 1 y 1 z 1 ; a
segunda posição é definida através do ângulo θ de rotação em torno de x 1 levando
o referencial móvel à posição angular mostrada na Figura 9.5b como x 2 y 2 z 2 e a
posição final é definida através do ângulo ψ de rotação em torno de z 2 levando o
91
referencial à posição mostrada na Figura 9.5c como x 3 y 3 z 3 . Esta posição é
corresponde à atitude do corpo rígido preso ao referencial móvel xyz em relação ao
referencial fixo XYZ. Observe-se que sempre os ângulos são definidos numa
sequência convencionada a fim de determinar corretamente a posição angular de
um corpo rígido. Conforme mostramos na seção 9.1, se alterarmos a ordem desta
sequência obteremos uma posição final diferente.
Z , z1
Z,z
∙
y1
Y
Y,y
X,x
X
x1
(a) x 1 y 1 z 1 rotação
em torno de Z
Z , z1
z2
y2
∙
θ
y1
θ
Y
∙
θ
X
x1 , x 2
(b) x 2 y 2 z 2 rotação θ em torno de x 1
Z ,z1
z2 , z3
y3
ψ∙
∙
θ
θ
∙
θ
X
y2
ψ
y1
Y
ψ
x3
x1 , x2
(c) x 3 y 3 z 3 rotação ψ em torno de z 2
Figura 9.5 - Ângulos de Euler
92
Devemos relacionar as componentes da velocidade angular do corpo rígido
no referencial xyz, com as velocidades angulares relativas dadas pelas derivadas
temporais dos ângulos de Euler. Seja dada a velocidade angular do corpo rígido
escrita em componentes do referencial móvel como
ω
x
i
y
j
z
k
(9.27)
Observando nas Figuras 9.5, podemos escrever esta velocidade angula r em função
dos ângulos de Euler como
ω
i ( sen ) j ( cos
)k
(9.28)
Algumas vezes, quando o corpo rígido é dado por um sólido de revolução com
velocidade angular relativa em torno de seu eixo longitudinal denominada spin,
utilizamos o referencial móvel de forma um pouco modificada.
O referencial
móvel xyz passa a ser parcialmente preso ao corpo, isto é, tem seu eixo z sempre
coincidente com o eixo longitudinal do corpo rígido, mas não acompanha o
movimento de spin. Assim o referencial móvel está na posição dada por x 2 y 2 z 2 e a
velocidade angular ω do corpo rígido é dada por:
ω Ω ωR
(9.29)
onde Ω é a velocidade angular do referencial móvel e ω R é a velocidade angular
relativa do corpo rígido em relação a este referencial. Portanto,
Ω
i ( sen ) j ( cos )k
(9.30)
e
ωR
k
(9.31)
Nestes casos chama-se precessão ao movimento angular representado pela variação
do ângulo
, chama-se nutação ao movimento angular definido pela variação do
ângulo θ e spin ao movimento definido pela variação angular ψ.
93
A PÊNDICE - R ELAÇÃO ENTRE D ERIVADAS T EMPORAIS
Sejam dois referenciais: XYZ um referencial fixo e outro referencial xyz
móvel em relação ao primeiro. Seja um vetor A, variável no tempo, escrito no
referencial móvel xyz como
A
Ax i
Ay j
Az k
(9.32)
A derivada temporal deste vetor em relação ao referencial xyz, é dada por
dA
dt
xyz
dAx
i
dt
dAy
dt
dAz
k
dt
j
(9.33)
Para calcular a derivada temporal do vetor A em relação ao referencial XYZ, temos
dA
dt
dA
dt
dAy
dAx
i
dt
XYZ
dt
j
dAz
k
dt
Ax
di
dt
Ay
dj
dt
Az
dk
dt
(9.34)
Como
di
dt
dj
dt
Ω i
Ω j
dk
dt
Ω k
(9.35)
onde Ω é a velocidade angular do referencial móvel xyz em relação a XYZ,
dA
dt
dAx
i
dt
dAy
dA
dt
dAx
i
dt
dAy
dA
dt
dA
dt
dt
j
dAz
k
dt
j
dAz
k Ω Ax i Ω Ay j Ω Az k
dt
Ax ( Ω i )
Ay ( Ω
j)
Az ( Ω k )
(9.36)
ou
dt
(9.37)
Logo
XYZ
dA
dt
Ω A
(9.38)
xyz
Observe-se que se A é constante em relação à xyz, então
dA
dt
dA
dt
Ω A
XYZ
(9.39)