da USP")
42
C APÍTULO 5
C INEMÁTICA DO M OVIMENTO P LANO DE
C ORPOS R ÍGIDOS
O estudo da dinâmica do corpo rígido pode ser feito inicialmente tomando
aplicações de engenharia onde o movimento é plano. Neste capítulo vamos analisar
as equações da cinemática do movimento plano. Este estudo é feito a fim de
encontrar a relação entre as posições, velocidades e acelerações de dois pontos de
um mesmo corpo rígido.
5.1
M OVIMENTO DE UM C ORPO R ÍGIDO
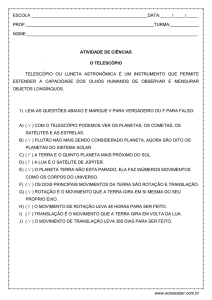
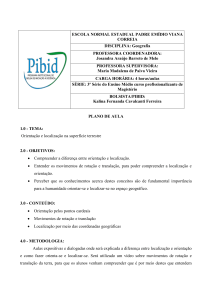
O movimento plano de um corpo rígido é definido como o movimento no
qual as trajetórias de todos os seus pontos são paralelas a um plano fixo. Veja
como exemplo a trajetória de um ponto P na figura 5.1 paralela ao plano xy.
z
C
P(t)
r
y
x
Figura 5.1 - Trajetória plana de um ponto P de um corpo rígido C.
43
Há dois casos particulares de movimentos planos: a translação e a rotação
em torno de um eixo fixo. O movimento geral plano pode ser decomposto numa
translação mais uma rotação.
Na translação uma linha qualquer do corpo rígido se mantém paralela em
relação à sua posição inicial, em qualquer instante. Neste caso se as trajetórias de
todos os pontos são retilíneas, o movimento é de translação retilínea. Se as
trajetórias de todos os pontos são curvilíneas e equidistantes, o movimento é de
translação curvilínea.
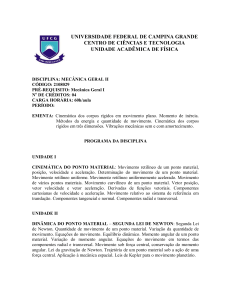
Na rotação em torno de um eixo fixo, as trajetórias de todos os pontos são
circulares, concêntricas, com centros no eixo fixo. É claro que pontos sobre o eixo
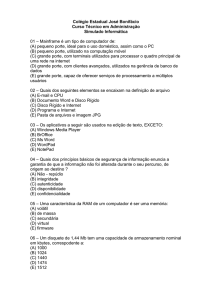
fixo não se movem. A figura 5.2 ilustra o mecanismo biela-manivela, no qual a
manivela realiza movimento de rotação, o pistão tem movimento de translação e o
elemento de ligação denominado biela realiza um movimento plano geral.
biela
manivela
pistão
Figura 5.2 - Mecanismo biela-manivela.
5.2
M OVIMENTO PLANO DE T RANSLAÇÃO
Considere um corpo rígido se movendo em translação plana e seja xy o
plano de referência do movimento. Vamos tomar dos pontos A e B deste corpo
rígido e um referencial móvel x´y´ fixo em A durante todo o movimento, mas
mantendo-se paralelo ao referencial xy, considerado absoluto.
Podemos relacionar as posições r A e r B destes dois pontos através de
rB
rA rB / A
(5.1)
44
onde rB / A
rB rA é o vetor posição de B em relação a A. Esta é uma forma
simplificada ou compacta de indicar este vetor. De fato, este vetor é a posição de B
em relação a um referencial móvel x´y´ fixo no ponto A.
y´
y
B
rB/A
C
x´
rB
A
rA
x
Figura 5.3 - Vetores velocidade de uma partícula P.
Derivando a (5.1) podemos relacionar as velocidades entre os pontos A e B
vB
onde v B / A
(5.2)
v A vB / A
v B v A corresponde velocidade relativa de B em relação a A. Aqui vale
também a observação feita acima, uma vez que a velocidade v B/A é de fato a
velocidade de B em relação ao referencial móvel x´y´. Vamos analisar a derivada
do vetor posição relativa. Seja
rB / A
xi
(5.3)
yj
Tomando a derivada de (5.3), obtemos
vB / A
drB / A
dt
dx
i
dt
dy
j
dt
x
di
dt
y
dj
dt
(5.4)
Sendo o corpo rígido, na translação o vetor r B/A é constante e portanto x´ e y´
também são constantes e suas derivadas no tempo são nulas. Como o referencial
móvel foi escolhido tal que i´=i e j´=j, então
45
vB / A
drB / A
dt
(5.5)
0
e
vB
(5.6)
vA
Derivando (5.6) obtemos a relação entre as acelerações dos pontos A e B
aB
(5.7)
aA
Pode-se concluir a partir de (5.6) e (5.7) que todos os pontos de um corpo rígido
em translação possuem velocidades iguais e acelerações iguais em cada instante.
Este resultado permite utilizar todas as equações desenvolvidas na cinemática e
dinâmica da partícula para corpos rígidos em translação. Podemos afirmar que as
equações da mecânica da partícula e do corpo rígido em translação são as mesmas.
5.3
M OVIMENTO PLANO DE R OTAÇÃO EM T ORNO DE UM E IXO FIXO
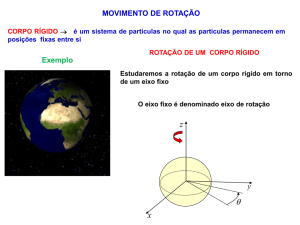
Vamos considerar o eixo fixo do movimento de rotação plana aqui estudado
paralelo ao eixo z do sistema de referência utilizado, passando por um ponto A.
Inicialmente vamos definir grandezas angulares deste movimento. Pontos
não têm movimento de rotação, mas para linhas este movimento pode ser definido.
y
B(t´)
B(t)
A
x
Figura 5.4 - Movimento angular do segmento AB.
Assim, chama-se velocidade angular média de uma linha AB, num intervalo
de tempo t=t´-t ao quociente
46
m
(5.8)
t
Passando ao limite (5.8), obtém a velocidade angular instantânea dada por
d
dt
(5.9)
Derivando (5.9), obtemos a aceleração angular dada por
d
dt
d2
dt 2
(5.10)
No movimento plano de rotação de corpos rígidos todos os segmentos de reta,
paralelos ao plano de referência, desenvolvem movimentos angulares iguais.
Assim, as velocidades angulares de todos os segmentos do corpo rígido são iguais.
Portanto, a velocidade angular é uma característica do corpo rígido ou parâmetro
do movimento do corpo rígido. O mesmo vale para a aceleração angular. A
velocidade
angular
no
movimento
plano
de
rotação
pode
ser
definida
vetorialmente, usando a regra da mão direita, da seguinte forma:
ω
(5.11)
k
onde o plano xy é o plano do movimento. Vamos calcular a velocidade de um
ponto B qualquer do corpo rígido. Tomando a equação (5.2) e considerando A no
eixo de rotação, temos que
vB
v A vB / A
vB / A
(5.12)
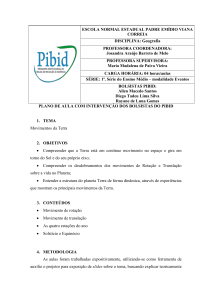
No movimento plano de rotação o ponto B realiza uma trajetória circular em torno
do eixo fixo z’, paralelo a z, que passa por A no plano do movimento de xy.
Portanto, da cinemática da partícula, obtemos:
47
vB / A
onde r
ds
dt
d ( r)
dt
d
r
dt
(5.13)
r
rB / A é raio da trajetória circular de B. Vetorialmente, o mesmo resultado
poderia ser obtido através do produto vetorial:
ω rB / A
vB
vB / A
ω
k
rB / A
r uB / A
(5.14)
onde
e portanto
vB
vB / A
ω rB / A
r ut
z’
A
ut
rB/A
B
x’
y’
ur
rB/P
P
Figura 5.5 - Movimento circular do ponto B de um corpo rígido.
Observe, a partir da figura 5.5, que para qualquer ponto P pertencente ao eixo de
rotação do movimento, tem-se
vB
ω rB / A
ω rB / P
(5.15)
Sendo o movimento de B circular os módulos de sua aceleração tangencial e
da normal são dados, respectivamente, por
48
aBt
d 2s
dt 2
aBn
v2
r
d 2 ( r)
dt 2
d
r
dt
(5.16)
r
e
2 2
r
r
2
(5.17)
r
Vetorialmente, obtemos a aceleração derivando no tempo a equação (5.14)
aB
aB / A
drB / A
dω
rB / A ω
dt
dt
aB
aB / A
α rB / A ω vB / A
ω
k
α
k
rB / A
r uB / A
(5.18)
ou
α rB / A ω (
rB / A )
(5.19)
Sendo
r un
obtêm-se as acelerações tangencial e normal de B, respectivamente,
a Bt
α rB / A
aB n
ω (ω rB / A )
r ut
(5.20)
e
5.4
2
r uB / A
2
r un
(5.21)
M OVIMENTO PLANO DE UM C ORPO R ÍGIDO
O movimento plano geral pode ser decomposto em dois movimentos, sendo
um de translação e outro de rotação. Vamos tomar o ponto A como referência e
seja B outro ponto qualquer do corpo rígido. A relação entre as posições r A e r B
desses dois pontos do corpo rígido é dada por
rB
rA rB / A
(5.22)
A figura 5.6 mostra estes vetores, o referencial fixo xy e o móvel x’y’, preso em A
mantendo-se em qualquer instante paralelo ao referencial fixo.
49
y´
y
B
rB/A
C
x´
rB
A
rA
x
Figura 5.6 - Vetores posição dos pontos A e B.
Derivando a (5.22) podemos relacionar as velocidades entre os pontos A e B
vB
onde v B / A
(5.23)
v A vB / A
v B v A corresponde velocidade relativa de B em relação a A. Aqui vale
também a observação feita anteriormente, uma vez que a velocidade v B/A é de fato a
velocidade de B em relação ao referencial móvel x´y´. Vamos analisar a derivada
do vetor posição relativa. Seja
vB / A
drB / A
dt
(5.24)
O movimento de B neste referencial x´y´ é circular. Conforme mostrado no item
anterior, (5.24) resulta igual a
vB / A
drB / A
dt
ω rB / A
(5.25)
Portanto, a relação entre as velocidades de A e B dada por (5.23) é igual a
vB
v A ω rB / A
(5.26)
50
Lembrando que os eixos dos referenciais são sempre paralelos, todos os
vetores podem ser escritos no referencial fixo xy.
Para se obter a relação entre as acelerações dos pontos A e B, derivamos a
equação (5.26), ou seja,
dv B
dt
dv A
dt
drB / A
dω
rB / A ω
dt
dt
(5.27)
A partir dos resultados obtidos no item anterior, podemos escrever
aB
aA α rB / A ω (ω rB / A )
(5.28)
onde
a B/ A t
α rB / A
a B/ A n
ω (ω rB / A )
r
vB / A
vB / A
é a aceleração tangencial relativa
2
r uB / A é a aceleração normal relativa
Assim, é possível obter a posição, a velocidade e a aceleração de um ponto B
qualquer de um corpo rígido a partir dos correspondentes vetores de um ponto A,
cujo movimento seja dado. As equações (5.22), (5.26) e (5.28) expressam estas
relações para um movimento plano qualquer. Podem ser aplicadas, é óbvio, para os
casos particulares de translação, onde os vetores velocidade angular e aceleração
angular são nulos, e de rotação em torno de um eixo fixo que passe por A, onde os
vetores velocidade e aceleração deste ponto são nulos.
5.5
M OVIMENTO R ELATIVO ENTRE D OIS C ORPOS D ISTINTOS
Seja um corpo rígido C que contenha um ponto A. Seja B um ponto qualquer
de outro corpo rígido. A relação entre as posições r A e r B desses dois pontos dos
corpos rígidos distintos é dada por
rB
rA rB / A
(5.29)
51
A figura 5.7 mostra estes vetores e um referencial fixo XYZ e outro móvel xyz,
preso ao corpo C com origem em A. Seja
a velocidade angular do referencial
móvel e, portanto, do corpo rígido C.
Y
y
B
x
rB/A
rB
A
rA
C
X
Figura 5.7 - Vetores posição dos pontos A e B.
Derivando a (5.29) podemos relacionar as velocidades entre os pontos A e B
drB
dt
drA
dt
drB / A
dt
(5.30)
Nesta igualdade nós temos que:
drB
dt
v B é a velocidade do ponto B
drA
dt
v A é a velocidade do ponto A que pertence ao corpo C
rB / A
xi
y j é o vetor da posição de B no referencial xyz
Portanto, podemos escrever a equação (5.30) como
vB
vA
d
(x i
dt
y j)
(5.31)
52
Como B se move em relação ao corpo C e, portanto, em relação ao referencial
móvel xyz, a equação (5.31) é igual a
vB
vA
x
di
dt
y
dj
dt
dx
i
dt
dy
j
dt
(5.32)
Vamos analisar as derivadas dos vetores unitários i e j. Estes vetores possuem
módulo unitário, mas tem a mesma velocidade angular do corpo rígido C. Assim
podemos escrever:
di
dt
lim
t
0
i
t
(5.33)
A figura 5.8 ilustra a obtenção do vetor
i para um intervalo de tempo
t.
Consideremos que neste intervalo de tempo a variação angular em torno do eixo x
seja dada por
. Então
di
dt
lim
t
0
i
lim
t
t
0
lim
t
i
Ω lim
0
i
0
(5.34)
Y
i
i(t+ t)
i(t)
X
Figura 5.8 - Vetor unitário i nos instantes t e t+ t.
Da figura 5.8, temos que
lim
i
0
2 sin
lim
0
2
i
i
j
(5.35)
53
Logo
di
dt
Ω i
j
(5.36)
De forma análoga pode-se obter
dj
dt
i
Ω j
(5.37)
Aplicando os resultados obtidos em (5.36) e (5.37) na equação (5.32) obtém-se
vB
vA
x (Ω i)
vB
vA
Ω ( xi
y (Ω
j)
dx
i
dt
dy
j
dt
(5.38)
ou
yj )
dx
i
dt
dy
j
dt
(5.39)
Finalmente, observando que as duas últimas parcelas de (5.39) representam a
velocidade do ponto B em relação ao referencial preso ao corpo rígido C, podemos
escrever
vB
vA
Ω rB / A v B / xyz
(5.40)
onde se definem
vA
Ω rB / A
v B / xyz
velocidade de arraste
velocidade de B relativa ao referencial móvel xyz
A relação entre as acelerações pos pontos A e B pode ser obtida derivando a
equação (5.40), resultando
aB
aA
dΩ
rB / A
dt
Ω
drB / A
dt
dv B / xyz
dt
(5.41)
54
Conforme mostrado anteriormente
drB / A
dt
Ω rB / A v B / xyz
(5.42)
e
dv B / xyz
Ω v B / xyz
dt
(5.43)
a B / xyz
Substituindo (5.42) e (5.43) em (5.41), obtemos
aB
dΩ
rB / A
dt
aA
Ω ( Ω rB / A ) 2 Ω vB / xyz
aB / xyz
(5.44)
onde se definem
aA
dΩ
rB / A
dt
2 Ω v B / xyz
a B / xyz
Ω ( Ω rB / A )
aceleração de arraste
aceleração de Coriolis ou complementar
aceleração de B relativa ao referencial móvel a xyz
Portanto, as equações (5.40) e (5.44) relacionam as velocidades e as
acelerações de dois pontos A e B, pertencentes a corpos rígidos distintos. Embora
tenham sido deduzidas para o movimento plano, se aplicam igualment e para
movimentos espaciais.
 da USP")