1
Controle de Aerogeradores Duplamente
Excitados Durante Afundamentos Momentâneos
de Tensão Desequilibrados
Victor Flores Mendes, Silas Yunghwa Liu e Selênio Rocha Silva
Resumo-- Nos últimos anos o número de usinas eólicas
conectadas às redes elétricas tem crescido exponencialmente. A
tecnologia com aerogerador duplamente excitado (DFIG) é uma
das com maior penetração no mercado devido a vantagens
operacionais e econômicas. Apesar dessas vantagens, esta
tecnologia é muito suscetível a distúrbios provenientes da rede,
como os afundamentos momentâneos de tensão (AMT). Durante
AMTs desequilibrados a componente de sequência negativa do
fluxo causa altas correntes no rotor da máquina o que representa
um risco para o conversor. Nesse contexto, esse trabalho analisa
através de uma modelagem matemática e de resultados
experimentais o comportamento do sistema durante os
afundamentos desequilibrados e propõe uma nova estratégia de
controle para melhoria da suportabilidade do DFIG.
Palavras Chaves-- Energia Eólica, Gerador de Indução
Duplamente Excitado, Afundamentos Momentâneos de Tensão,
Suportabilidade a Afundamentos de Tensão.
I. INTRODUÇÃO
O investimento massivo em fontes alternativas de energia
tem reduzido o preço da energia elétrica gerada através dessas
fontes, tornando-a competitiva quando comparada com as
fontes tradicionais. Uma das tecnologias mais competitivas são
os sistemas de conversão de energia eólica (SCEE). O número
de usinas eólicas no mundo tem crescido exponencialmente
nos últimos anos e o Brasil é um dos países com as maiores
taxas de crescimento. Atualmente o país conta com 1,2GW de
potência instalada e esse valor irá dobrar até o final de 2012.
Existem diferentes tecnologias para a conversão de energia
eólica diferindo basicamente no tipo de gerador e na eletrônica
de potência utilizada para a conexão à rede. Uma das
tecnologias mais utilizadas é a tecnologia com gerador de
indução duplamente alimentado, conhecido por sua sigla em
inglês DFIG - "doubly-fed induction generator" [1]. Essa é
uma tecnologia a velocidade variável que tem a vantagem de
utilizar conversores dimensionados para apenas uma parcela
Esse trabalho foi desenvolvido com auxilio financeiro das agências de
fomento FAPEMIG e CAPES/CNPQ.
V. F. Mendes é Professor Assistente na Universidade Federal de Itajubá e
aluno de doutorado do Programa de Pós-Graduação em Engenharia Elétrica
da
Universidade
Federal
de
Minas
Gerais
(PPGEE-UFMG)
([email protected]).
S. Y. Liu é aluno de doutorado do PPGEE-UFMG ([email protected]).
S. R. Silva é Professor Titular da Universidade Federal de Minas Gerais
([email protected]).
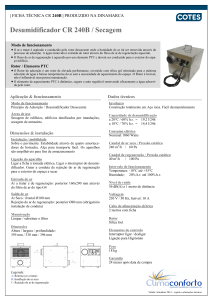
da potência nominal da máquina, geralmente 30%. A Fig. 1
mostra o diagrama esquemático dessa tecnologia. Essa
topologia possui duas desvantagens: o uso de uma caixa de
transmissão, que é um ponto frágil na parte mecânica, e a
direta conexão do estator à rede, o que aumenta a
suscetibilidade do sistema a distúrbios provenientes da rede.
Fig. 1. Sistema de geração de energia eólica DFIG.
Neste contexto é importante o estudo do comportamento da
tecnologia DFIG durante distúrbios no sistema elétrico. Nos
últimos anos muitos trabalhos têm sido publicados nesse
assunto. Grande parte dos artigos estuda o comportamento dos
SCEE durante afundamentos momentâneos de tensão (AMT),
desenvolvendo estratégias para melhorar a suportabilidade do
sistema durante tais distúrbios, assim como requerido nos
códigos de rede mais modernos [2].
Os trabalhos [3]-[7] modelam o DFIG durante
afundamentos de tensão equilibrados, elucidando o
comportamento dos fluxos, das tensões e correntes no gerador.
Esta análise é importante para compreender os fenômenos
envolvidos no processo e desenvolver estratégias para
melhorar o desempenho do sistema durante os afundamentos,
assim como apresentado em [8]-[18].
O artigo [8] calcula novas referências para o controle de
corrente do rotor usando o enlace de fluxo do estator de forma
a reduzir as correntes fluindo pelo conversor. Em [9] a
referências de correntes também são modificadas de acordo
com o enlace de fluxo do estator e uma análise mais
aprofundada das condições em que o sistema consegue
"sobreviver" ao afundamento é apresentada. A redução nas
correntes de rotor também é demonstrada em [10], porém
utilizam-se compensadores "feedforward" ao invés da
mudança nas referências de corrente. As estratégias propostas
em [8]-[10] têm a desvantagem da necessidade de estimação
do fluxo. A compensação "feedforward" é mais simples em
[11] já que se utilizam apenas as correntes de estator como
novas referências para o controle. Estas estratégias reduzem as
2
correntes de rotor, reduzindo a probabilidade de o sistema ser
desconectado da rede ou mesmo de danificar-se o conversor.
Os trabalhos discutidos anteriormente mostram apenas
resultados para AMTs equilibrados, mas a maioria das faltas
no sistema elétrico são desequilibradas [21]. A operação do
DFIG durante desequilíbrios de tensão é abordada em [12][18]. Em [12] compensadores "feedforward" são empregados
para diminuir as pulsações de torque causadas pelas correntes
de sequência negativa. O uso de estruturas controlando
independentemente as correntes de sequência positiva e
negativa é apresentado em [13] e [14]. Em [15] e [16] ambas
as componentes são controladas usando-se controladores
proporcionais e integrais acrescidos de uma parcela ressonante
(PIR). Esses trabalhos demonstram a redução nas oscilações
do torque eletromagnético devido a sequência negativa, porém
o transiente causado durante os AMTs não é analisado já que
apenas desequilíbrios permanentes de tensão são abordados.
Neste contexto, o presente trabalho analisa o
comportamento do DFIG durante os afundamentos
assimétricos utilizando-se de uma modelagem matemática e de
resultados experimentais obtidos em uma bancada
experimental de pequeno porte, focando principalmente no
transiente durante o afundamento. A partir desses resultados
propõe-se uma nova estratégia de controle para a melhoria da
suportabilidade do sistema e esta é validada também através de
resultados experimentais.
A presente seção apresenta a motivação e objetivos desse
trabalho, bem como o estado da arte. Na Seção II a tecnologia
DFIG e a bancada de testes são brevemente descritas. Na
seção Seção III a modelagem matemática é apresentada e na
Seção IV os resultados experimentais para a estratégia de
controle clássica durante os AMTs desequilibrados são
apresentados e discutidos. A Seção V é dedicada à
apresentação da estratégia proposta e a apresentação dos
resultados obtidos. Finalmente as conclusões são expostas na
Seção VI.
II. A BANCADA EXPERIMENTAL
Os SCEE que utilizam a tecnologia DFIG são caracterizados
por operarem a velocidade variável, permitindo assim a
extração da máxima potência do vento. O gerador utilizado é
uma máquina de indução com rotor bobinado onde o estator
está diretamente conectado a rede, enquanto o rotor é
alimentado por um conversor na configuração "back-to-back",
como mostrado na Fig.1. O controle do fluxo de potência no
rotor da máquina possibilita o gerador operar tanto abaixo
quanto acima da velocidade síncrona.
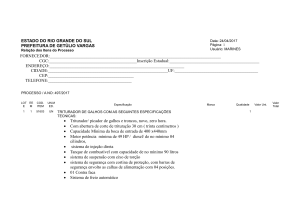
A Fig.2 mostra o diagrama esquemático da bancada de
testes utilizada nesse trabalho cuja potência é 4kW. A turbina
eólica é representada por um simulador que usa um motor de
indução controlado em velocidade de modo que este
desenvolva as mesmas características de torque e velocidade
de uma turbina real. As características da turbina simulada são
calculadas em uma plataforma dSpace 1103 que gera a
referência para um inversor comercial.
O controle do gerador também é implementado na mesma
plataforma dSpace o qual gera pulsos PWM com frequência
igual a 5kHz para os "gate drivers" do conversor do lado do
rotor (RSC - "rotor side converter") e do lado da rede (GSC "grid side converter"). As correntes e tensões necessárias ao
controle são medidas utilizando-se transdutores e
condicionadas para valores condizentes com a entrada do
conversor analógico-digital do dSpace (±10V), o qual amostra
os sinais também com 5kHz.
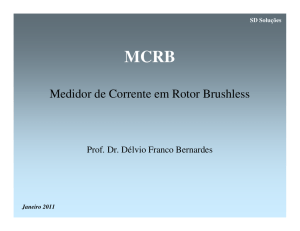
Para testar os afundamentos de tensão na bancada o
dispositivo ilustrado na Fig. 3 é usado. Este é composto de
indutores trifásicos em série e paralelo, de modo que ao fechar
o contator as correntes drenadas pelo indutor L1 causam uma
queda de tensão no indutor L2, funcionando como um AMT
nos terminais do SCEE. Para gerar um afundamento
desequilibrado uma fase do indutor em paralelo é
desconectada.
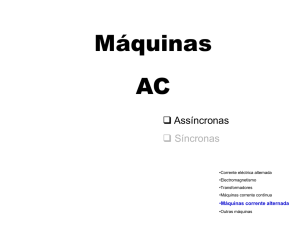
A Fig. 4 mostra o diagrama de blocos representativo da
estrutura de controle clássico dos dois conversores:
• GSC: malhas internas controlando as correntes que
fluem pelo filtro, usando o referencial síncrono orientado
segundo o ângulo da tensão da rede. Malhas externas de
controle da tensão no barramento CC e potência reativa;
• RSC: malhas internas controlando as correntes no rotor
orientadas segundo o ângulo da tensão na rede e malhas
externas controlando a potência ativa e reativa que flui
pelo estator do gerador.
Mais detalhes sobre o controle implementado podem ser
encontrados em [19]. Os parâmetros da bancada são
apresentados no Anexo.
Fig. 2. Diagrama da bancada de testes representando um sistema de conversão de energia eólica equipado com a tecnologia DFIG
3
→
→
→
vs± = Rs is± +
d ψ s±
dt
→
± jωs ψ s± ,
(3)
→
→
→
vr± = Rr ir± +
→
d ψ r±
dt
→
±
±
±
→
→
ψ r = Lr ir + Lm is
±
Fig. 3. Gerador de afundamentos de tensão (GAT)
Sistemas trifásicos equilibrados possuem apenas
componentes de sequência positiva, enquanto durante
desequilíbrios de tensão surgem também componentes de
sequência negativa [5]. Sendo assim, para a análise do
comportamento do DFIG durante afundamentos de tensão
desequilibrados é utilizada a teoria das componentes
simétricas [20]. As variáveis de estator podem ser
representadas por:
→
→
→
→
Ar = A0 + A+ e
onde
ωr = ω s − ω
+
e
jωr+ t
→
+ A− e
jωr− t
,
±
±
,
(6)
(1)
(2)
ωr = −ωs − ω .
−
Usando-se as equações clássicas das máquinas de indução
no referencial síncrono e as dividindo em sequência positiva e
negativa, já que não há sequência zero, tem-se:
(7)
Em (7) o sobrescrito indica o referencial utilizado para
orientação e o subscrito representa a componente sequencial
em questão. Usando essa equação em (3)-(6) e aplicando a
Transformada de Laplace, as componentes do enlace de fluxo
de estator podem ser expressas em função da tensão no estator
e da corrente no rotor:
→
onde A0, A+, A- são, respectivamente, as componentes de
sequência zero, positiva e negativa. ωs é a freqüência angular
das tensões no estator. Similarmente as variáveis de rotor
podem ser divididas em componentes seqüenciais:
→
(5)
Adq+ = Adq+ + + Adq+ − = Adq+ + + Adq− −e− j 2ωst .
ψ s± ( s ) =
d±
→
,
onde as variáveis e parâmetros utilizados tem seu significado
usual. As variáveis podem ser decompostas em eixo direto
(real) e quadratura (imaginário), de modo que [15]:
III. MODELAGEM MATEMÁTICA
As = A0 + A+ e jωs t + A− e − jωs t ,
(4)
→
ψ s = Ls is + Lm ir
→
→
+ jωr± ψ r± ,
ψ (s) =
±
sq ±
( s + 1 τ s )Vs± ( s) + Lm τ s ( s + 1 τ s ) I r±
d±
d±
2
1
2
s + 2 s + ωs
τs
∓ωsVs±d± (s) + Lm τ s ( s + 1 τ s ) I r±q± ( s )
2
1
2
s + 2 s + ωs
τs
.
(s)
, (8)
(9)
Através de (8) e (9) observa-se que a dinâmica das
sequências positiva e negativas do fluxo são similares, mas
como mostra (7) a componente positiva no referencial positivo
representa um valor constante, enquanto nesse mesmo
Fig. 4. Diagrama de blocos representativo da estrutura de controle do DFIG
4
Observa-se na Fig. 5 que no inicio do afundamento (t=0s),
altas correntes são induzidas no rotor da máquina atingindo
mais que o dobro da corrente em regime permanente. Essas
altas correntes se devem a componente natural da tensão
induzida do rotor sobreposta a componente de sequência
negativa. A componente natural decai em aproximadamente
0,2s e resta apenas a sequência negativa durante o AMT. As
componentes da corrente de rotor e suas freqüências podem
ser observadas na análise de Fourier mostrada na Fig. 6.
Em reação ao aumento de corrente, a tensão sintetizada pelo
RSC aumenta como pode ser visto na Fig. 7, porém a tensão
2 1
imposta pelo controle não é capaz de manter as correntes
s + τ s ± ωr± ωs
L
controladas no valor de referência. É importante mencionar
− j 2 ωs t −
+
+
m
s
Vsd + + e
Vrd ( s ) =
Vsd − ( s) que para o teste em questão o conversor não saturou, isto é, ele
1
Ls s 2 + 2 s + ω 2
foi capaz de sintetizar a tensão demanda pelo controle. Caso o
s
τs
conversor sature as correntes de rotor serão ainda maiores o
(10) que pode ocasionar danos no RSC.
As oscilações na corrente devido às componentes natural e
ωr±
de sequência negativa provocam oscilações no torque
ω ∓ ωs s + τ
Lm r±
eletromagnético, como ilustra a Fig. 8. Tais oscilações causam
+
s
Vs+d + + e− j 2ωs tVs−d − ( s) estresses mecânicos na caixa de transmissão e também
Vrq ( s) =
1
Ls s 2 + 2 s + ω 2
refletem em pulsações na potência ativa e reativa gerada pelo
s
τs
sistema.
A Fig. 9 mostra o teste para a velocidade de 1200 RPM
(11)
quando
se tem o AMT começando em θ0=900. A análise de
As equações (10) e (11) mostram que a tensão induzida no
rotor depende diretamente das tensões de sequência positiva e Fourier dessas correntes mostrada na Fig. 10 evidenciam a
negativa no estator (rede). No referencial síncrono positivo a presença apenas das componentes de sequência positiva e
componente positiva induz uma componente contínua na negativa, demonstrando assim a influência do instante do
tensão de rotor, enquanto a componente negativa induz uma AMT no comportamento do enlace de fluxo de estator,
componente oscilatória (2ωs). Essas componentes de tensão se consequentemente da tensão de rotor que por sua vez afeta a
refletem nas correntes de rotor como mostra os resultados corrente de rotor.
Para os resultados apresentados observou-se que mesmo
experimentais exibidos na próxima seção.
para
um afundamento pequeno (15%) as correntes atingiram
O instante de ocorrência do afundamento influencia o
valores
bem acima do valor de pico em regime permanente.
comportamento do fluxo e consequentemente da tensão no
Desse
modo,
faz-se necessário o uso de outras estratégias para
rotor. Para um afundamento monofásico tem-se:
controlar
a
componente
natural e de sequência negativa da
• Caso no instante do afundamento a tensão na rede
corrente
de
rotor
mantendo
assim as correntes em valores
0
esteja passando por um máximo (θ0=90 ), as componentes
aceitáveis.
Na
próxima
seção
uma estratégia é proposta para
positiva e negativa estarão em oposição se anulando,
realizar
esse
controle.
assim o fluxo não possui uma componente transitória
(natural) no inicio do afundamento;
V. CONTROLE RESSONANTE MODIFICADO (CRM)
• Caso a tensão na rede esteja passando por zero (θ0=00)
Na literatura existem diversas estratégias para o controle da
ocorre o contrário e assim tem-se a máxima componente
natural. De acordo com (8) e (9) essa componente possui sequência negativa, assim como já apresentado na introdução.
um amortecimento dependente da constante de tempo Uma estratégia de controle simples que utiliza controladores
ressonantes é apresentada em [15] e [16]. A estrutura de
estatórica (τs)
Essas conclusões ficarão mais clara na próxima seção controle é similar ao controle clássico, porém adiciona-se uma
parcela ressonante no controlador PI ajustada no dobro da
quando os resultados experimentais são analisados.
frequência da rede para controlar a componente de sequência
negativa da corrente de rotor. O diagrama de blocos
IV. CONTROLE CLÁSSICO
representativo desse controle é apresentado na Fig.11.
Nessa seção são apresentados e analisados os resultados
No presente trabalho propõe-se a utilização do controle
obtidos na bancada experimental para um afundamento ressonante, porém além da parcela ressonante que controla a
monofásico com tensão remanescente igual a 85%, utilizando- sequência negativa, se acrescenta uma parcela que atua na
se o controle clássico.
componente natural induzida durante os transientes de tensão.
As Figuras 5 a 8 mostram os resultados para a máquina A equação do controlador de corrente é dada por:
operando na velocidade 1800 RPM e fornecendo 3kW para a
K r1 s
K r2 s
rede, quando o AMT ocorre em θ0=00, isto é, quando tem-se a G ( s ) = K + K i +
,
(12)
+
p
maior componente natural possível para aquela condição.
s s 2 + ( 2ω ) 2 s 2 + (ω )2
referencial a componente negativa tem uma freqüência igual
ao dobro da frequência da rede.
Comparando-se a influência da tensão na rede e da corrente
de rotor no enlace de fluxo de estator nota-se que a tensão tem
um efeito preponderante. Sendo assim, uma aproximação
bastante utilizada na literatura é desprezar a corrente de rotor,
isto é, considerar o gerador com o rotor aberto [5].
Considerando a aproximação de rotor aberto e utilizando-se
(4)-(9), a tensão induzida no rotor orientada no referencial
síncrono positivo é dada por:
(
(
)
)
(
)
s
s
5
Fase A da Corrente de Rotor
Análise de Fourier da Corrente de Rotor
Fase A da Tensão de Rotor
0.5
0.45
6
300
0.4
2
0
-2
-4
Componente Positiva
Limites de Tensão
200
0.35
Componente Negativa
0.3
100
Tensão (V)
Amplitude (% da Fundamental)
4
Corrente (A)
400
0.25
0.2
Componente Natural
0.15
0
-100
-200
0.1
-300
0.05
-6
-0.1
0
0.1
0.2
0.3
Tempo (s)
0.4
0.5
0.6
Fig. 5. Fase A da corrente de rotor (1800
RPM, Θ0=00)
0
-20
0.7
0
20
40
60
80
100
Frequência (Hz)
120
140
160
Fig. 6. Análise de Fourier da corrente de rotor
(1800 RPM, Θ0=00)
Torque Eletromagnético Estimado
-400
-0.1
180
0
Amplitude (% da Fundamental)
0
1
Corrente (A)
-30
0
-1
-40
X = 10
Y = 0.544
0.6
2
-20
0.4
Análise de Fourier da Corrente de Rotor
20
-10
0.3
0.7
3
10
0.2
Tempo (s)
Fig. 7. Fase A da tensão imposta pelo RSC
(1800 RPM, Θ0=00)
Fase A da Corrente de Rotor
30
Torque (N.m)
0.1
0.5
Componente Positiva
0.4
X = 90.1
Y = 0.309
0.3
Componente Negativa
0.2
-50
-2
0.1
-60
-70
-0.1
0
0.1
0.2
Tempo (s)
0.3
0.4
Fig. 8. Torque Eletromagnético Estimado
(1800 RPM, Θ0=00)
-0.1
-0.05
0
0.05
0.1
0.15 0.2
Tempo (s)
0.25
0.3
0.35
Fig. 9. Fase A da corrente de rotor (1200
RPM, Θ0=900)
0.4
0
-20
0
20
40
60
80
100
Frequência (Hz)
120
140
160
180
Fig. 10. Análise de Fourier da corrente de
rotor (1200 RPM, Θ0=900)
Fig. 11. Diagrama de blocos representativo do controle ressonante
onde Kp e Ki são os ganhos do PI que são mantidos iguais ao
do controle clássico e Kr1 e Kr2 são os ganhos da parcela
ressonante que controla a componente de sequência negativa e
natural, respectivamente. Esses ganhos devem ser escolhidos
de modo a tornar a parcela ressonante tão seletiva quanto
necessário.
Os diagramas de Bode para o controlador clássico e com a
modificação proposta nesse trabalho é apresentada na Fig. 12.
Observa-se que com a correta escolha dos ganhos um pico de
ressonância praticamente não afeta o outro. Deve ser avaliado
o efeito da implementação digital de tal controlador, pois pode
ocorrer uma atenuação do ganho de malha fechada das
parcelas ressonantes.
A fim de reduzir corrente de rotor e possibilitar o DFIG
suportar ao afundamento sem desligar da rede ou ocorrer
algum dano ao conversor a referência de sequência negativa é
mantida em zero.
A Fig. 13 mostra as correntes de rotor para as mesmas
condições do teste mostrado na Fig. 5. Observa-se que o pico
inicial de corrente foi reduzido substancialmente e as
componentes natural e negativa foram praticamente fortemente
atenuadas durante o AMT, comprovando a eficácia da
estratégia proposta.
A maior limitação para o funcionamento da estratégia CRM
está no limite de tensão que pode ser sintetizada pelo
conversor. A Fig. 14 mostra que as tensões sintetizadas no
teste experimental foram menores que o limite do conversor.
Quanto maior o afundamento maior é a tensão necessária para
a correta operação do controle proposto. Sendo assim, uma
análise mais aprofundada das condições em que a estratégia irá
ser eficaz deve ser feita. Esse será o tema de trabalhos futuros.
6
Observa-se que a componente natural de fluxo que surge
durante o transiente de tensão e a sequência negativa do fluxo
devido ao desequilíbrio de tensão induzem altas tensões no
rotor que por sua vez provocam altas correntes que podem
danificar o conversor.
Através dos resultados obtidos uma estratégia de controle
foi proposta para reduzir as componentes natural e de
sequência negativa das correntes de rotor através do uso de
controladores ressonantes. Os resultados experimentais
comprovam a eficácia dessa estratégia, porém a sua correta
operação depende do limite de tensão do conversor.
Bode Diagram
100
Magnitude (dB)
80
CR
CRM
60
40
20
0
-20
180
Phase (deg)
0
-180
-360
-540
-1
0
10
1
10
VII. ANEXO
2
10
10
Frequency (Hz)
TABLE I – PARÂMETROS DA BANCADA
Fig. 12. Resposta em frequência do controlador ressonante clássico
(CR) e o controle ressonante modificado (CRM)
Parâmetro
Potência
Frequência (fs)
Tensão Estator/Rotor (Ksr)
Indutância de Magnetização (Lm)
Indutância Própria de Rotor (Lr)
Resistência de Rotor (Rr)
Indutância Própria de Estator (Ls)
Resistência de Estator (Rs)
Correntes de Rotor
5
4
3
Corrente (A)
2
1
0
-1
-2
VIII. AGRADECIMENTOS
-3
-4
-5
-0.1
0
0.1
0.2
Tempo (s)
0.3
0.4
Fig. 13. Correntes de rotor (1800 RPM, Θ0=00)
Os autores agradecem à CAPES/DAAD que através do
programa PROBRAL apoiou a cooperação entre a UFMG e
TU Dresden (Alemanha) e ao CNPQ e à FAPEMIG pelo apoio
financeiro no desenvolvimento desse trabalho.
IX. REFERÊNCIAS
Fase A da Tensão de Rotor
400
[1]
300
Limites de Tensão
200
[2]
100
Tensão (V)
Bancada
4 kW
50 Hz
400/950 V
160.1 mH
169.7 mH
1.32 Ω
169.7 mH
1.07 Ω
0
-100
-200
[3]
-300
-400
-0.1
0
0.1
0.2
Tempo (s)
0.3
0.4
Fig. 14. Fase A da tensão imposta pelo RSC (1800 RPM, Θ0=00)
[4]
VI. CONCLUSÕES
Neste trabalho o comportamento de sistemas de conversão
de energia eólica equipados com a tecnologia com gerador
duplamente alimentado foi analisado durante afundamentos
momentâneos de tensão desequilibrados.
Primeiramente uma modelagem matemática no domínio da
frequência foi desenvolvida para o entendimento dos
fenômenos envolvidos no processo. Posteriormente resultados
experimentais obtidos em uma bancada de 4kW foram
apresentados e analisados.
[5]
[6]
A. D. Hansen and L. H. Hansen, “Market Penetration of
wind turbine concepts over the years”. Risø National
Laboratory – Wind Energy Department, Denmark.
I. Erlich and U. Bachmann. “Grid Code Requirements
Concerning Connection and Operation of Wind
Turbines in Germany”. IEEE PES General Meeting, v.
2, pp 1253-1257, 2005.
V. F. Mendes, C. V. Sousa, S. R. Silva, B. Rabelo, S.
Krauss and W. Hoffman. “Behavior of Doubly-Fed
Induction Generator During Symmetrical Voltage Dips –
Experimental Results”. IEEE International Symposium
on Industrial Electronics, pp. 2345 – 2350, 2010.
J. López, P. Sanchis, X. Roboam and L. Marroyo.
“Dynamic behavior of the doubly fed induction
generator during three-phase voltage dips”. IEEE Trans.
on Energy Conversion, v. 22, pp. 709 – 717, 2007.
López, J., Gúbia, E., Sanchis, P., Roboam, X., and
Marroyo, L. (2008a).Wind turbines based on doubly fed
induction generator under asymmetrical voltage dips.
IEEE Trans. on Energy Conversion, 23:321 – 330.
S. Seman, J. Niiranen, S. Karneva, A. Arkkio and J.
Saitz. “Performance study of a doubly fed wind power
7
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
induction generator under network disturbances”. IEEE
Transactions on Energy Conversion, v. 21, pp. 883–
890, 2006.
Lu-hua Zhang, Xu Cai and Jia-hu Guo. “Dynamic
Responses of DFIG Fault Currents Under Constant AC
Exitation Condition”. Power and Energy Engineering
Conference, pp. 1 – 4, 2009.
J. López, P. Sanchis, E. Gúbia, A. Ursúa, L. Marroyo
and X. Roboam. “Control of doubly fed induction
generator under symmetrical voltage dips”. ISIE, IEEE
International Symposium on, pp. 2456-2462, 2008.
D. Xiang, L. Ran, P. J. Tavner and S. Yang. “Control of
doubly fed induction generator in a wind turbine during
grid fault ride-through”. IEEE Trans. on Energy
Conversion, v. 21, pp. 652 – 662, 2006.
J. Liang, Wei Qiao and R. G. Harley. “Feed-Forward
Transient Current Control for Low-Voltage RideThrough Enhancement of DFIG Wind Turbines”. IEEE
Transac. on Energy Conversion, v. 25, n. 3, pp. 836 –
843, 2010.
F. K. A. Lima, A. Luna, P. Rodriguez, E. H. Watanabe
and F. Blaabjerg. “Rotor Voltage Dynamics in the
Doubly Fed Induction Generator During Grid Faults”.
IEEE Trans. on Power Electronics, v. 25, pp. 118-130,
2010.
T. K. A. Brekken and N. Mohan. “Control of a doublyfed induction wind generator under unbalanced grid
voltage conditions”. IEEE Trans. on Energy Conversion,
vol. 22, pp. 129-135, 2007.
L. Xu, “Coordinated control of DFIG’s rotor and grid
side converters during network unbalance”. IEEE Trans.
on Power Electronics, vol. 23, pp. 1041–1049, 2008.
O. Gomis-Bellmunt, A. Junyent-Ferre, A. Sumper, and
J. BergasJane. "Ride-through control of a doubly fed
induction generator under unbalanced voltage sags,"
IEEE Trans. on Energy Conversion, vol. 23, no. 4, pp.
1036-1045, 2008.
[15] J. Hu, Y. He, L. Xu and B.W. Williams. “Improved
control of DFIG systems during network unbalance
using PI-R current regulators”. IEEE Transactions on
Industry Electronics, pp. 439–451, 2009.
[16] J. Hu and Y. He. “DFIG wind generation systems
operating with limited converter rating considered under
unbalanced network conditions e Analysis and control
design”, Renewable Energy, vol. 36, issue 2, pp. 829847, 2011.
[17] J. Hu and Y. He. “Reinforced Control and Operation of
DFIG-Based Wind-Power-Generation System Under
Unbalanced Grid Voltage Conditions”. IEEE Trans. on
Energy Conversion, vol. 24, n. 4, pp. 905–915, 2009.
[18] A. Luna, K. Lima, F. Corcoles, E. Watanabe, P.
Rodriguez and R. Teodorescu. "Control of DFIG-WT
under unbalanced grid voltage conditions", Energy
Conversion Congress and Exposition, pp.370-377, 2009.
[19] B. C. Rabelo Jr., W. Hofmann, R. G. de Oliveira, J. L.
da SILVA, S. R. Silva. “Reactive Power Control Design
in Doubly-Fed Induction Generators for Wind
Turbines”. IEEE Trans. on Industrial Electronics, v. 56,
no. 10, pp. 4154-4162, 2009.
[20] C. F. Wagner and R. D. Evans. “Symmetrical
Components as Applied to the Analysis of Unbalanced
Electrical Circuits”. McGraw-Hill, 1933.
[21] M. H. Bollen, Understanding Power Quality Problems:
Voltags Sags and Interuptions. Piscataway, NJ, USA:
IEEE Press, 2002.