ESTIMACÃO DA RESPOSTA EVOCADA À ESTIMULAÇÃO
SOMATOSSENSORIAL ELÉTRICA SENOIDAL DE
5 Hz E 2 kHz, UTILIZANDO WAVELETS E
ANÁLISE EM COMPONENTES INDEPENDENTES
Eduardo de Queiroz Braga
BELO HORIZONTE, BRASIL.
MARÇO DE 2007
Eduardo de Queiroz Braga
ESTIMACÃO DA RESPOSTA EVOCADA À ESTIMULAÇÃO
SOMATOSSENSORIAL ELÉTRICA SENOIDAL DE
5 Hz E 2 kHz, UTILIZANDO WAVELETS E
ANÁLISE EM COMPONENTES INDEPENDENTES
Dissertação submetida ao Curso de Pós-Graduação em
Engenharia Elétrica da Escola de Engenharia da
Universidade Federal de Minas Gerais, como requisito
parcial à obtenção do título de Mestre em Engenharia
Elétrica.
Área de Concentração: Engenharia Elétrica
Orientador:
Prof. Carlos Julio Tierra Criollo
Universidade Federal de Minas Gerais
Belo Horizonte
Escola de Engenharia da UFMG
2007
ii
Folha de Aprovação a ser anexada
iii
Dedicatória
À minha mãe, Dirce.
Símbolo de persistência
e perseverança.
iv
Agradecimentos
Agradeço ao Professor Benjamim Resende de Menezes pelo apoio dado a mim,
funcionário da Universidade Federal de Minas Gerais;
Ao Professor Hani Camille Yehia pelo apoio, incentivo aos meus estudos e valiosas
sugestões ao trabalho.
Ao meu orientador, o Professor Carlos Julio Tierra Criollo, pela paciência e
persistência ao conduzir este trabalho. Também pela grande amizade.
Aos colegas do NEPEB (Núcleo de Estudo e Pesquisa em Engenharia Biomédica),
em especial, à Priscila Camêlo pela grande contribuição para o préprocessamento dos sinais utilizados neste trabalho.
Às amigas Áurea Amorim, Anete Vieira e Arlete Vidal, pelo grande incentivo.
Ao Professor Gilberto Mastrocola Manzano, Pesquisador da UNIFESP, por sua
valiosa contribuição neste trabalho.
A meus pais pela constante presença e doação dados a mim e meus irmãos.
À minha esposa Tânia, por seu apoio, carinho e Amor.
Finalmente a Deus, por me dar força e coragem para continuar sempre...
v
Isso eu vos mando: que vos ameis uns aos outros. (Jo, 15,17)
vi
Resumo
A avaliação psicofísica da sensibilidade das fibras finas (FF) e fibras grossas (FG) por
estimulação elétrica senoidal foi proposta nos anos 80. A freqüência de 5 Hz estimularia fibras
finas amielínicas e a de 2 kHz fibras mielinizadas de grosso calibre. Visando uma análise
quantitativa da resposta no córtex cerebral a estes estímulos, estimou-se o potencial evocado (PE)
utilizando as técnicas de média coerente e remoção de ruído com a árvore de permuta cíclica
empregando Wavelet (CSTD). A avaliação do desempenho de ambas as técnicas foi realizada
utilizando sinais simulados a partir de dados subrogados. Elas foram aplicadas a sinais de EEG (5
voluntários para 5 Hz e 3 voluntários para 2 kHz) coletados no eletrodo Cz do Padrão
Internacional 10-20, durante 100 estímulos de 20 s de duração, com intervalo de 10s entre
estímulos. A intensidade do estímulo foi de 2 vezes o limiar de sensibilidade (LS) para 5 Hz e
2 kHz. Os sinais EEG foram amostrados a 500 Hz e 20 kHz, para os estímulos de 5 Hz e 2 kHz
respectivamente. A remoção do artefato ao estímulo de 2 kHz foi realizada com um filtro passabaixas de 1 kHz, enquanto que para 5 Hz foi utilizada a análise em componentes independentes
(ICA) usando estatísticas de segunda ordem (SOBI-RO). As simulações mostraram uma melhor
estimativa do PE com o CSTD. No PE para 5 Hz foram identificadas componentes em N104 (1
voluntário), P179 (4 voluntários), N234 (3 voluntários), P280 (3 voluntários) e N493 (todos os
voluntários). Para 2 kHz foram identificadas, em todos os voluntários, P31, N82, P129, N224,
P389. Os resultados indicam menor latência das primeiras componentes do PE para 2 kHz, o que
sugere uma maior velocidade na transmissão da informação, que poderia estar associada ao
estímulo de fibra grossa. O CSTD e SOBI-RO podem ser ferramentas muito úteis para a
estimativa do PE.
vii
Abstract
The psychophysical evaluation of the sensibility of the thin and thick fibers with
sinusoidal current stimulation was proposed in the 80s. The 5 Hz stimulus would be related to the
thin unmyelinated fiber and the 2 kHz to the thick myelinated fiber. Aiming a quantitative
analysis of the cerebral cortex response to those stimuli, the evoked potential (EP) was estimated
with the coherent mean and the Cyclic Shift Tree Denoising using Wavelet (CSTD). The
evaluation of performance of both technique was made with simulated subrogate data. These
techniques were applied to EEG signals (5 volunteers with 5 Hz and 3 for 2 kHz) collected on the
Cz electrode (10-20 International Standard System), during 100 stimuli of 20s each, with interval
between stimuli of 10s. The stimulus intensity was twice the sensitivity threshold (ST) for 5 Hz
and 2 kHz. The signals were sampled at 500 Hz and 20 kHz, for 5 Hz and 2 kHz, respectively. To
remove the 2 kHz stimulus artifact, a low-pass filter at 1 kHz was applied, and for 5 Hz stimulus
artifact was applied the Independent Component Analysis using second order statistics (SOBIRO). The simulated data showed a better performance of the CSTD technique for EP estimation.
The EP estimated with 5 Hz stimulus presented the following components: N104 (one volunteer),
P179 (four volunteers) and N234 (three volunteers), P280 (three volunteers) and N493 (all
volunteers). The EP with 2 kHz stimulus presented the P31, N82, P129, N224 and P389
components in all volunteers. The results indicate shorter latency in the first components of the
2 kHz EP. This fact suggests more speed of the information transmission as expected by thick
fibers stimulation. The CSTD and SOBI-RO techniques can be very useful tools for the EP
estimation.
viii
Lista de Tabelas
Tabela 1: Distribuições de íons na região da membrana celular do axônio gigante de lula .........................................17
Tabela 2: Tipos de Fibras aferentes e os Receptores associados a elas. .......................................................................27
Tabela 3: Estatística das latências dos 10 PEs (128 trechos) com diferentes RSR.......................................................67
Tabela 4: Estatística das amplitudes dos 10 PEs (128 trechos) com diferentes RSR. ..................................................67
Tabela 5: Latências das componentes do PE após estímulo de 2kHz...........................................................................70
Tabela 6: Médias das latências das componentes do PE após estímulo de 5Hz ...........................................................79
ix
Lista de Figuras
Figura 1: O Sistema Nervos Central (KANDEL et al., 2000). .......................................................................................5
Figura 2: Os nervos periféricos (BEAR et al. 2002).......................................................................................................8
Figura 3: Gânglios da Raiz Dorsal (KANDEL et al., 2000). ........................................................................................9
Figura 4: A Região do córtex somato-sensitivo (BEAR et al., 2002)...........................................................................10
Figura 5: Percurso da informação somatossensorial advinda do dedo até o córtex somatossensorial(KANDEL et al.,
2000) ............................................................................................................................................................................11
Figura 6: O Neurônio (KANDEL et al. 2000)..............................................................................................................13
Figura 7: Diferentes tipos de Neurônios (KANDEL et. al, 2000). ...............................................................................14
Figura 8: Diferentes tipos Células da Glia (KANDEL et al, 2000) ..............................................................................15
Figura 9: Potencial de Repouso em uma célula nervosa (BEAR et al. ,2002)..............................................................17
Figura 10: O Potencial de Ação (KANDEL et al., (2000)). .........................................................................................18
Figura 11: Latência da Sinapse Elétrica .......................................................................................................................19
Figura 12: Transmissão química (KANDEL et al., 2000) ..........................................................................................20
Figura 13: Transformação de estímulo físico em atividade elétrica com conseqüente liberação de mediadores
químicos em sinapses químicas (KANDEL et al., 2000) 0.........................................................................................22
Figura 14: O nodo de Ranvier localizado no axônio (BEAR et al.,2002) ....................................................................24
Figura 15: Arquitetura do neocortex do cérebro (KANDEL et al., 2000) ....................................................................25
Figura 16: Tipos de Fibras e suas características (KANDEL et al., 2000) .................................................................27
Figura 17: Potencial de ação composto (KANDEL et al., 2000)................................................................................28
Figura 18: Traços de sinais de EEG coletados no couro cabeludo de paciente com epilepsia do lobo temporal; ........29
Figura 19: Método de medida para o encontro das posições dos eletrodos da linha média (SHARBROUGH et al.,
1991).............................................................................................................................................................................30
Figura 20: Visão frontal do posicionamento dos eletrodos centrais em relação ao plano coronal. .............................31
Figura 21: Vista superior dos eletrodos da linha temporal bem como dos eletrodos F3 e F4 e P3 e
P4(SHARBROUGH et al., 1991). ................................................................................................................................32
Figura 22: Localização e nomenclatura dos eletrodos intermediários, padronizado pela Sociedade Americana de
Eletroencefalografia (American Electroencephalographic Society).............................................................................33
Figura 23: A Potencial evocado a estímulo somatossensorial ......................................................................................35
Figura 24: Formas de onda de uma senoide e de uma Wavelet(MISITI et al., 2006).................................................39
Figura 25: Principio da transformada discreta de wavelet (MISITI et al., 2006)........................................................41
Figura 26: A transformada discreta com a sub-amostragem (MISITI et al., 2006) ....................................................42
Figura 27: A TDW para um sinal senoidal com ruído associado (MISITI et al., 2006) ............................................42
Figura 28: A TDW para múltiplos níveis. Neste caso, para três níveis (MISITI et al., 2006)......................................43
Figura 29: A sobre-amostragem com inclusão de zeros ...............................................................................................44
Figura 30: Processo completo da TDW direta (Análise) e inversa (Síntese)................................................................44
Figura 31: O (a) hard-thresholding e o (b) soft-thresholding .......................................................................................45
Figura 32: CSTD aplicada a 8 trechos..........................................................................................................................48
Figura 33: (a) Modelo de PE ideal. (b) Trecho de EEG espontâneo ............................................................................58
Figura 34: Trechos de (a) EEG espontâneo coletado (b)EEG surrogado .....................................................................60
Figura 35: Histogramas de (a) EEG coletado e (b)EEG subrogados............................................................................60
Figura 36: Densidade Espectral de Potência de dois trechos (a,b) de EEG subrogados...............................................60
Figura 37: (a) Modelo do PE, e média coerente de 128 trechos com (b) RSR=-19dB, (c) RSR=-31dB e (d)RSR=43dB .............................................................................................................................................................................65
Figura 38: Média coerente de 10 conjuntos de 128 trechos após CSTD para RSR de:(a) -19 dB, (b)-31dB e (c) 43dB .............................................................................................................................................................................66
Figura 39: PE com 6 conjuntos de 100 trechos para o voluntário #1 (a) média coerente, (b) CSTD. ..........................68
Figura 40: PE com 600 trechos do sinal de EEG do voluntário #1 (a) média coerente, (b) CSTD ..............................69
Figura 41: Média geral dos PEs (grand-Average) dos 3 voluntários após método CSTD .........................................69
Figura 42: Média coerente do canal Cz (a) antes e (b) após a remoção do artefato ao estímulo de 5Hz com SOBI-RO
......................................................................................................................................................................................70
Figura 43: Componentes independentes na banda de 8-10Hz identificadas e removidas através de SOBI-RO...........71
Figura 44: PE (a) antes e (b) após remoção da banda de 8-10Hz .................................................................................71
x
Figura 45: Espectro de potência do PE (a) antes e (b) após a aplicação de SOBI-RO .................................................72
Figura 46: PEs com média coerente de cada um dos 10 conjuntos de trechos após SOBI (Voluntário #1) ................72
Figura 47: PEs de cada um dos 10 conjuntos de trechos após SOBI-RO e CSTD -Voluntário #1...............................73
Figura 48: Media e desvio padrão dos dez PÉS após SOBI-RO e CSTD -Voluntário #1 ............................................73
Figura 49: PE obtido com a média coerente do sinal original (sessão de 100 trechos) - voluntário #1.......................74
Figura 50: PE médio dos 10 conjuntos de 64 trechos obtido após SOBI-RO e média coerente , e SOBI-RO e CSTD,
para o voluntário #1.....................................................................................................................................................74
Figura 51: PE obtido com a média coerente do sinal original (sessão de 100 trechos) - voluntário #2.......................75
Figura 52: PE médio dos 10 conjuntos de 64 trechos obtido após SOBI-RO e média coerente, e SOBI-RO e CSTD,
para o voluntário #2.....................................................................................................................................................75
Figura 53: PE obtido com a média coerente do sinal original (sessão de 100 trechos) - voluntário #3.......................76
Figura 54: PE médio dos 10 conjuntos de 64 trechos obtido após SOBI-RO e média coerente, e SOBI-RO e CSTD,
para o voluntário #3.....................................................................................................................................................76
Figura 55: PE obtido com a média coerente do sinal original (sessão de 100 trechos) - voluntário #4.......................77
Figura 56: PE médio dos 10 conjuntos de 64 trechos obtido após SOBI-RO e média coerente, e SOBI-RO e CSTD,
para o voluntário #4.....................................................................................................................................................77
Figura 57 : PE obtido com a média coerente do sinal original (sessão de 100 trechos) - voluntário #5......................78
Figura 58: PE médio dos 10 conjuntos de 64 trechos obtido após SOBI-RO e média coerente, e SOBI-RO e CSTD,
para o voluntário #5.....................................................................................................................................................78
Figura 59: Grand-average para os cinco voluntários após SOBI-RO e CSTD .............................................................79
xi
Lista de Abreviaturas
A- - Ânions orgânicos
Cl- - Ions de cloro
CSTD - Cyclic Shift Tree Denoise
dB - Decibel
EEG - Eletroencefalograma
ERP - Events Related Potentials
ICA - Independent Components Analysis
Ca+ - Íon de Cálcio
K+ - Íon de Potássio
Na+ - Íon de Sódio
PE - Potencial Evocado
RSR - Relação Sinal-Ruído
SOBI-RO - Second Order Blind Identification with Robust Orthogonalization
SNR - Signal-to-noise ratio
µV - Microvolts
xii
Sumário
Dedicatória ..................................................................................................................................... iv
Agradecimentos ............................................................................................................................... v
Resumo .......................................................................................................................................... vii
Abstract......................................................................................................................................... viii
Lista de Tabelas.............................................................................................................................. ix
Lista de Figuras ............................................................................................................................... x
Lista de Abreviaturas..................................................................................................................... xii
Sumário......................................................................................................................................... xiii
Capítulo 1: Introdução ..................................................................................................................... 1
1.1 Objetivos................................................................................................................................ 3
1.2 Estrutura do Trabalho ............................................................................................................ 4
Capítulo 2: O Sistema Nervoso Central .......................................................................................... 5
2.1 Os Componentes do Sistema Nervoso Central...................................................................... 5
2.2.1 O Cérebro ....................................................................................................................... 6
2.2.2 O Diencéfalo................................................................................................................... 6
2.2.3 O Mesencéfalo................................................................................................................ 6
2.2.4 O Cerebelo...................................................................................................................... 7
2.2.5 A Ponte ........................................................................................................................... 7
2.2.6 O Bulbo .......................................................................................................................... 7
2.3 O Sistema Nervoso Periférico ............................................................................................... 8
2.4 Regiões do Cérebro Associadas à Estimulação Somatossensoriais ...................................... 9
2.4.1 O Neurônio ................................................................................................................... 12
2.4.2 Glia ............................................................................................................................... 15
2.5 O Potencial de Ação ............................................................................................................ 16
2.6 Sinapses Elétricas e Sinapses Químicas .............................................................................. 18
2.6.1 Sinapses Elétricas ......................................................................................................... 19
2.7 Propriedades Elétricas dos Neurônios ................................................................................. 22
2.7.1 Os Nodos de Ranvier.................................................................................................... 23
2.8 A Atividade Elétrica Cerebral: Potenciais Elétricos Gerados no Cérebro .......................... 24
2.9 A Estimulação Somatossensorial ........................................................................................ 26
2.9.1 O Eletroencefalograma ..................................................................................................... 28
Capítulo 3: Métodos Para Obtenção do Potencial Evocado .......................................................... 37
3.1 A Média Coerente................................................................................................................ 37
3.2 Análise com Remoção de Ruídos Wavelet.......................................................................... 39
3.2.1 A Transformada Discreta de Wavelets......................................................................... 40
3.2.2 A Transformada Discreta Inversa de Wavelets ............................................................ 43
3.2.3 A Remoção de Ruídos com Wavelets .......................................................................... 44
.3.3 A Análise em Componentes Independentes (ICA)............................................................. 48
3.3.1. Pre-processamento ( Branqueamento dos Dados) ....................................................... 50
3.3.2 Algoritmo para o Processamento SOBI........................................................................ 52
Capítulo 4: Materiais e Métodos ................................................................................................... 58
4.1 Remoção de Ruído em Sinais de EEG Simulados .............................................................. 58
4.2 Sinais EEG Durante Estimulação de 2 kHz ........................................................................ 61
4.3 Sinais EEG Durante Estimulação de 5 Hz. ......................................................................... 62
Capítulo 5: Resultados................................................................................................................... 64
xiii
5.1 Testes Para EEG Simulado.................................................................................................. 64
5.2 Resultados Para Estímulo Elétrico Senoidal de 2 kHz ........................................................ 68
5.3 Resultados Para Estímulo Elétrico Senoidal de 5Hz ........................................................... 70
Capítulo 6: Discussão .................................................................................................................... 80
6.1 Dados Simulados ................................................................................................................. 80
6.2 Sinais EEG Durante Estímulo de 2 kHz e de 5 Hz.............................................................. 80
Capítulo 7: Conclusão ................................................................................................................... 84
Apêndice A - Branqueamento com Robusta Ortogonalização...................................................... 86
Referências .................................................................................................................................... 88
xiv
Capítulo 1: Introdução
As informações sensórias como, tato, pressão e dor, são captadas por receptores somatosensoriais localizados na pele. Estes receptores relacionam-se a neurônios cujos corpos situam-se
nos gânglios dorsais. Assim, essas informações, logo após passarem por uma transdução, seguem
ao longo do ramo periférico e de sua continuação, no ramo central dos neurônios dos gânglios
dorsais. Em conjunto, esses ramos são denominados fibras aferentes primárias (GUYTON, 1997).
Essas fibras aferentes primárias possuem diferentes diâmetros, e transmitem diferentes sensações
através da medula espinal, ao córtex somatossensorial: fibras finas transmitem dor e temperatura
e fibras grossas, tato (KANDEL et al., 2000). Fibras de diferentes diâmetros poderiam ser
ativadas com diferentes freqüências da corrente senoidal, de forma que, corrente senoidal de 5 Hz
estimularia as fibras amielínicas, a freqüência de 250 Hz as fibras mielinizadas finas e a de 2 kHz
as fibras mielinizadas de grosso calibre (KATIMS et al., 1987). As evidências de que tais
premissas sejam verdadeiras estão sujeitas a discussão. Em trabalhos clínicos, enquanto alguns
autores tenham encontrado uma correlação entre funções relacionadas às fibras finas e o limiar
para correntes a 5 Hz (MASSON et al., 1989; RO et al., 1989), outros não conseguiram
estabelecer a mesma correlação (TACK et al., 1994; VINIK et al., 1995). Apesar destas
diferenças, efeitos de drogas (LIU et al.1996; LIU et al., 1997; WALLACE et al, 1996; TAY et
al., 1997) e isquemia por torniquete (BARON & IRVING, 2002) apresentam resultados
concordantes com a seletividade dos estímulos. Relação entre diferentes percepções de fibra fina
e fibra grossa e diferentes freqüências de correntes elétricas senoidais tem sido encontradas
(PIMENTEL et al., 2006). Mesmo frente a estas incertezas, a determinação do limiar psicofísico
para as diferentes correntes tem sido utilizada como discriminador dos diferentes sistemas de
fibras estimulados (VEVES et al., 1994; KEMPLER et al., 1994; CHENG et al. 1999; BARKAI
et al, 2000; VÁRKONYI et al., 2002; YAMASHITA et al., 2002; NISHIMURA et al., 2003a;
NISHIMURA et al., 2003b; NISHIMURA et al., 2004). A facilidade de controle dos parâmetros
da estimulação de corrente senoidal apresenta forte apelo clínico para a sua eventual aplicação no
estudo de potenciais evocados. Até o momento, essa modalidade de estimulação não foi
1
explorada, principalmente no que diz respeito às baixas freqüências para estimular o sistema
somatossensorial.
A resposta evocada pelo estímulo de corrente senoidal, sobreposta ao sinal do
eletroencefalograma (EEG) espontâneo, pode ser estimada por técnicas no domínio do tempo e
da freqüência, sendo que a técnica padrão utilizada na prática clínica é a média coerente
(sincronizada com o estímulo) (NUNEZ, 1981). No entanto, atualmente existem técnicas
modernas de processamento de sinais que podem ser utilizadas para melhorar a estimativa do
Potencial Evocado (PE), como a análise em componentes independentes (ICA) e filtragem
utilizando Wavelet. Existem trabalhos feitos com o objetivo de melhorar a relação sinal-ruído
(RSR) do PE através do uso de ferramentas ICA (MARK, 2000; NISHIDA et. al., 1999), bem
como para a remoção de componentes de ruído na analise de fontes cerebrais com sinal
eletromagnético (JAMES & LOWE, 2003).
O algoritmo SOBI-RO (Second Order Blind Identification with Robust Orthogonalization)
(BELOUCHRANI et al., 1997; BELOUCHRANI and CICHOCKI, 2000) é uma interessante
opção para a análise de sinais de EEG coletados no couro cabeludo, pois permite extrair
informações espacialmente localizadas através dos eletrodos. Entretanto, a sua utilização em
sinais coletados em um único eletrodo de EEG durante varias estimulações, visando à remoção de
artefatos a estímulos elétricos senoidais de 5 Hz, bem como as freqüências na banda de baixa
freqüência não associadas diretamente à resposta evocada ao estímulo, ainda não foi vista na
literatura. Esta é uma alternativa à filtragem nas bandas de baixa freqüência, que, em conjunto
com a média coerente, melhoraria a RSR do potencial evocado (PE), visto que o artefato ao
estímulo está na mesma banda de freqüência do PE.
A Transformada Wavelet é utilizada por muitos autores para processamento de sinais
biomédicos. Dentre eles, MCOOEY et al. (2005), que a utilizou para a detecção de picos das
componentes do PE em cada trecho de dados coletados para estimulação visual mostrando uma
grande correlação entre os sinais gerados através da média dos sinais após a decomposição com
Wavelet e a média coerente. TURNER et. al. (2003) já a utilizou associada a algoritmos
evolucionários, com o objetivo de melhorar a RSR do PE à estimulação do nervo mediano, com
2
um número reduzido de estímulos. Em seu trabalho, ele obteve uma melhor visualização frente à
média coerente. Já CAUSEVIC et al. (2005) obteve ótimos resultados, ao melhorar a RSR do PE
auditivo, através da remoção de ruídos Wavelet, com o método CSTD (Cyclic Shift Tree
Denoising). A transformada Wavelet para a remoção de ruídos com o método CSTD é assim,
uma boa alternativa à média coerente. Seu apelo está em melhorar a RSR através da eliminação
de ruídos na banda de freqüências mais altas.
O uso associado de SOBI-RO e CSTD com o objetivo de melhorar a RSR, proposto nesse
trabalho ainda não foi encontrado na literatura. Os potenciais de ambas as técnicas, SOBI-RO
para eliminar artefatos ao estímulo nas baixas freqüências e a ferramenta CSTD para a remoção
de ruídos de altas freqüências, podem ser explorados a fim de obter melhor RSR do PE e
conseqüentemente identificar as suas componentes durante estimulação elétrica com corrente
senoidal de 5 Hz e 2 kHz.
1.1 Objetivos
Aplicar a análise em componentes independentes (ICA) utilizando a ferramenta SOBI-RO em
sinais de EEG durante estimulação de corrente senoidal de 5 Hz, como pré-processamento em
duas fases: a primeira, para remover o artefato do estímulo; e a segunda, para remover ruídos,
outliers e freqüências do EEG espontâneo que não estariam associadas à resposta evocada e que
dificultam a obtenção do PE.
Aplicar a ferramenta de remoção de ruídos Wavelet através do método de Árvore de Permuta
Cíclica (CSTD), como alternativa à média coerente, tanto em sinais de EEG com estimulação de
2 kHz como também nos sinais pré-processados com SOBI-RO para estimulação de 5 Hz.
Avaliar o desempenho de CSTD frente à média coerente para estimar o PE.
Analisar os sinais de EEG, submetidos à estimulação somatossensorial com corrente senoidal de
5 Hz e 2 kHz, identificando as componentes dos PEs para ambas as freqüências de estimulação,
avaliando as possíveis diferenças entre as morfologias desses PEs.
3
.
1.2 Estrutura do Trabalho
No capítulo 2 será feita uma descrição do sistema nervoso central e periférico. Serão abordados
como se dão as transmissões dos sinais, os contatos sinápticos e a condução desses sinais.
Também será descrito como os sinais do eletroencefalograma são gerados e como eles podem ser
captados no couro cabeludo através de eletrodos. Por fim, explica-se como estimular o sistema
nervoso periférico através de estímulos somato-sensoriais a fim de se obter o potencial evocado
(PE) pelo estímulo. No Capítulo 3, será feita uma descrição da técnica de Análise em
Componentes Independentes (ICA), bem como da separação cega das fontes (BSS). Também
serão descritas as bases teóricas do método de remoção de ruídos através do uso da transformada
Wavelet. O capítulo 4 descreve toda a metodologia utilizada no estudo. O seguinte capítulo
apresenta os resultados obtidos. No Capítulo 6, faz-se a discussão dos resultados obtidos no
trabalho. Finalmente, no Capítulo 7 estão as conclusões e propostas de trabalhos futuros.
4
Capítulo 2: O Sistema Nervoso Central
Este capítulo apresenta os principais componentes do sistema nervoso central e a função básica
de cada um. São descritas as regiões do córtex cerebral relacionado a estímulos somatosensoriais. Há uma descrição das características fisiológicas das células nervosas (Neurônios e
Glia) e suas principais funções; Como ocorre a formação do potencial de ação e como ele está
relacionado com a transmissão de informação através das fibras nervosas, como também com a
geração de sinapses elétricas e sinapses químicas.
Em seguida é explicado como se dá a atividade elétrica do cérebro bem como os sinais elétricos
gerados no córtex cerebral; como são coletados os sinais elétricos através do eletroencefalograma e a interpretação deles durante a estimulação somatossensorial.
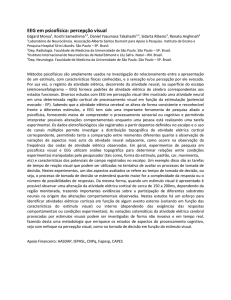
2.1 Os Componentes do Sistema Nervoso Central
O Sistema Nervoso é dividido em sistema nervoso central e sistema nervoso periférico. O sistema
nervoso central é constituído pelos dois hemisférios cerebrais (cérebro), o diencéfalo, o
mesencéfalo, o cerebelo, a ponte, o bulbo, e a medula espinal (Figura 1). (KANDEL et al., 2000).
Figura 1: O Sistema Nervos Central (KANDEL et al., 2000).
5
2.2.1 O Cérebro
É o órgão onde se radicam a sensibilidade consciente, a mobilidade voluntária e a Inteligência. É
considerado como o centro nervoso mais importante de todo o sistema. Apresenta um profundo
sulco que chega até o corpo caloso e o divide em dois hemisférios (esquerdo e direito). O cérebro
contém os centros nervosos relacionados com os sentidos, a memória, o pensamento e a
inteligência. E nele que se localiza o cortex somatossensorial. Ele coordena as ações voluntárias
desenvolvidas pelo indivíduo, além de comandar atos inconscientes (KANDEL et al., 2000).
2.2.2 O Diencéfalo
O diencéfalo situa-se rostralmente ao mesencéfalo e contém o tálamo, que é o elemento de
ligação essencial na transferência da informação sensorial (exceto a olfatória) de receptores na
periferia para as regiões de processamento sensorial dos hemisférios cerebrais. Ele tem um
envolvimento modulatório e de barreira na transmissão da informação sensorial. Com isso ele
determina se a informação sensorial alcança a consciência no neocortex. Contém também o
hipotálamo, situado em posição ventral ao tálamo, e que regula importantes funções como a
homeostase e a reprodução. Ele controla várias funções como: crescimento, ingestão de alimento,
de líquidos e comportamento materno, regulando as secreções hormonais da glândula pituitária.
Além disso, o hipotálamo influencia o comportamento através das suas extensas conexões
aferentes e eferentes com quase todas as regiões do sistema nervoso central. É também um
importante componente no sistema motivacional cerebral, iniciando e mantendo comportamentos
que o organismo julga recompensadores. Uma parte do hipotálamo, o núcleo supraquiasmático,
regula ainda os ritmos circadianos, comportamentos cíclicos vinculados ao ciclo diário claroescuro.
2.2.3 O Mesencéfalo
O mesencéfalo situa-se rostralmente à ponte e é a menor parte do tronco encefálico. Os neurônios
do mesencéfalo possuem importantes ligações do sistema motor, particularmente, do cerebelo, os
núcleos da base e os hemisférios cerebrais. Controla muitas funções sensórias e motoras,
incluindo a movimentação ocular e a coordenação dos reflexos visuais e auditivos.
6
2.2.4 O Cerebelo
O cerebelo localiza-se logo abaixo do cérebro e acima da ponte. Ele é ligado ao tronco encefálico
através dos chamados pendículos; e entre seus dois hemisférios se interpõe uma pequena
saliência chamada Vermix que lembra um verme. O cerebelo contém uma concentração muito
grande de neurônios, se comparado a qualquer outra região, incluindo os hemisférios cerebrais.
Ele recebe aferências somatossensorias da medula espinal, informação motora do córtex cerebral
e aferências dos canais semicirculares dos órgãos vestibulares do ouvido interno sendo
responsável pelo equilíbrio do corpo. Também é o centro coordenador dos movimentos
comandados pelo cérebro. Ele está envolvido no aprendizado das habilidades motoras, intervém
na orientação espacial e participa na manutenção do tônus muscular.
2.2.5 A Ponte
Localiza-se abaixo do cérebro, diante do cerebelo em posição rostral ao bulbo. Na parte ventral,
ela contém os chamados núcleos pontinos (KANDEL et al, 2000), que retransmitem informações
acerca do movimento e sensações do córtex cerebral para o cerebelo. A ponte está também
relacionada com reflexos associados às emoções, como o riso e as lágrimas bem como funções
relacionadas ao paladar.
2.2.6 O Bulbo
O Bulbo, também chamado de Medula Oblonga localiza-se logo acima da medula espinal. É um
órgão elaborador de atos reflexos e, como tal, rege a atividade de funções importantes para a
vida. Ela possui grupos que controlam a pressão sanguínea e a respiração, o ritmo dos batimentos
cardíacos e certos atos reflexos como a deglutição, o vômito, a tosse e o piscar dos olhos.
7
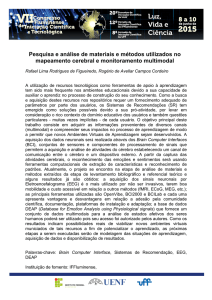
2.3 O Sistema Nervoso Periférico
O sistema nervoso periférico é dividido em somático e vegetativo. A parte somática (Figura 2)
constitui os neurônios sensoriais que inervam a pele, os músculos e as articulações, cujos corpos
situam-se nos gânglios da raiz dorsal (no caso da cabeça, nos gânglios cranianos), situados no
interior da coluna vertebral, adjacentes à medula espinal, como exemplifica a Figura 3.
Figura 2: Os nervos periféricos (BEAR et al. 2002)
8
Após a transdução do estímulo somatossensorial pelas células receptoras que são inervadas pelas
terminações nervosas das fibras aferentes primárias, a informação segue ao longo do ramo
periférico e de sua continuação no ramo central dos neurônios dos gânglios dorsais. Após os
gânglios, surgem ramificações que terminam ou dentro da substância cinzenta espinal (Figura 3),
ou ascendem para núcleos localizados na junção da medula espinal com o bulbo. As que
terminam localmente proporcionam vias funcionais de arco reflexo, enquanto que as ramificações
ascendentes terminam no encéfalo, carregando informações para o córtex somatossensorial.
Figura 3: Gânglios da Raiz Dorsal (KANDEL et al., 2000).
2.4 Regiões do Cérebro Associadas à Estimulação Somatossensoriais
A região do Cérebro definida como córtex somatossensorial primário (S1) (DUUS, 1997) está
associada à interpretação da estimulação somatossensorial (Figura 4). O córtex somatossensorial
é uma estrutura em camadas. Ele está localizado nas áreas 1,2 e 3 de Brodmann (BEAR et al.,
2002), e corresponde à circunvolução pós-central e à parte da circunvolução pré-central. Ela
contorna a borda superior do hemisfério, ocupando a parte posterior do lóbulo paracentral da face
interna do hemisfério. O córtex da área 3 é heterotípico e apresenta aspecto granuloso. A maior
9
parte desta área ocupa a parede posterior do sulco central. A maior parte das áreas 1 e 2 ocupam a
crista da convolução pós-central; seu córtex é homotípico e um pouco mais espesso.
O córtex somatossensorial recebe densas aferências a partir do núcleo do tálamo. A maioria das
aferências oriundas do tálamo termina nas áreas 3a e 3b (Figura 4), e elas se projetam para as
áreas 1 e 2, bem para o córtex somatossensorial secundário (BEAR et al., 2002). Como as
conexões são quase sempre bidirecionais, há axônios dessas áreas que retornam para as áreas 3a e
3b. As diferentes áreas do córtex somatossensorial 1 (áreas 1,2 e 3) possuem funções distintas. A
área 3b está envolvida principalmente com a textura, tamanho e forma dos objetos. Sua projeção
para a área 1 envia informações sobre textura, enquanto que sua projeção para a área 2 informa o
tamanho e a forma (KADEL, et al., 2000).
As informações somatossensoriais entram na medula espinal através de células ganglionares da
raiz dorsal, em seguida, elas sobem passando pelo bulbo, ponte, mesencéfalo, seguindo pelo
tálamo até chegar ao córtex somatossensorial, provocando a excitação desta região. A Figura 5
exemplifica o percurso de uma informação vinda do dedo até chegar ao córtex somatossensorial.
Figura 4: A Região do córtex somatossensitivo (BEAR et al., 2002).
10
Figura 5: Percurso da informação somatossensorial advinda do dedo até o córtex somatossensorial (KANDEL
et al., 2000).
11
2.4.1 O Neurônio
O Neurônio típico apresenta quatro regiões morfologicamente definidas: o corpo celular, os
dendritos, o axônio e suas terminações pré-sinápticas (Figura 3). Cada uma dessas regiões possui
funções especificas na geração de sinais (RAMON E CAJAL, 1995; KANDEL et. al, 2000).
Corpo celular: também chamado de soma, é o centro do metabolismo da célula. Ele contém o
núcleo e o retículo endoplasmático rugoso e liso, responsáveis pela síntese de proteínas da célula.
No corpo celular se originam os dendritos e o axônio, que é um prolongamento tubular que surge
do cone axônico.
Dendritos: são ramificações que se originam no corpo celular e se assemelham aos ramos de uma
árvore. Têm como principal função a coleta ou recepção de sinais advindos de outras células
neurais.
Axônio: é a principal unidade condutora do neurônio. Ele é capaz de conduzir os sinais elétricos
(Potenciais de Ação) por distâncias que variam entre 0,1 mm a 3 metros (KANDEL et. al, 2000).
Os potenciais de ação são iniciados na região de disparo (início do axônio). São potenciais que
trafegam a uma velocidade entre 1 e 100m/s com amplitude de 100mV constante, dada à sua
característica tudo-ou-nada, sendo regenerados em intervalos regulares. Eles têm duração de
aproximadamente 1ms (Figura 10). Para assegurar a condução com alta velocidade dos sinais
elétricos, axônios de maior calibre são circundados por bainhas isolantes, chamadas de mielina. A
bainha de mielina é interrompida a intervalos regulares pelos nodos de Ranvier. Nesses nodos,
que são desprovidos de isolamento elétrico, ocorre a regeneração dos sinais elétricos. Em sua
terminação, o axônio se divide em ramos muito finos, que fazem contatos com outros neurônios.
Esses contatos são denominados sinapses. Assim, a célula transmissora de um sinal é chamada de
pré-sináptica e a receptora de pós-sináptica. Os espaços entre as sinapses são chamados de fendas
sinápticas. A maioria dos axônios se comunica com dendritos de células pós-sinápticas. Mas
podem ocorrer comunicações no corpo celular ou no segmento inicial ou na região terminal do
axônio da célula pós-sináptica. Muitos axônios se dividem em vários ramos e dessa forma,
conduzem informações para diferentes destinos.
12
Figura 6: O Neurônio (KANDEL et al. 2000)
Os neurônios podem ser classificados em três grandes grupos (Ramon y Cajal, 1995): Unipolar,
bipolar e multipolar (Figura 7).
Unipolares: São células onde os dendritos não surgem do soma, mas do axônio.
Essas células são encontradas em seres invertebrados, mas podem aparecer em alguns
vertebrados.
13
- Bipolares: Eles apresentam os dendritos em um extremo e o axônio em outro extremo do soma.
São muito comuns em células sensoriais como as da retina e as da região do olfato. As células
sensoriais do gânglio espinal que carregam informações para o córtex cerebral como: toque,
pressão e dor, ao se desenvolverem, são bipolares, mas após o crescimento, se tornam pseudounipolares, com dois extremos. O primeiro advindo do músculo ou células na pele, e o outro
seguindo através do gânglio dorsal para a medula espinal (KANDEL et al., 2000).
Figura 7: Diferentes tipos de Neurônios (KANDEL et. al, 2000).
14
- Multipolares: São aquelas que possuem um axônio em um extremo do soma, e nas outras
regiões do soma um conjunto numeroso de dendritos. Três exemplos importantes desse tipo de
neurônio são (KANDEL et al., 2000):
Neurônios motores espinais que inervam as fibras musculoesqueléticas.
As células piramidais, muito comuns no córtex cerebral e no hipocampo.
As células de Purkinje situadas no Cerebelo. Estas células possuem grandes ramificações de
dendritos que faz com que tenham a região de entrada pré-sinápticas muito grande.
2.4.2 Glia
Em torno dos corpos celulares e dos axônios estão localizadas as células da glia. Existem cerca de
10 a 50 vezes mais células da glia que neurônios no sistema nervoso central dos vertebrados.
Apesar de glia significar cola, essas células não têm a função de manter unidas as outras células.
Mas possuem funções vitais servindo como elementos de sustentação, dando firmeza e estrutura
ao cérebro. Elas separam, e ocasionalmente, isolam grupos de neurônios entre si. Existem três
tipos de células de glia, os oligodentrócitos, as células de Schwann e os Astrócitos. Estudos
recentes indicam que as células gliais também participam nas atividades neurais (HE & SUN,
2006; ALLEN & BARRES, 2005).
Figura 8: Diferentes tipos Células da Glia (KANDEL et al, 2000).
15
Os oligodentrócitos (Figura 8) têm a função de isolar eletricamente os axônios do sistema
nervoso central, enrolando seus processos membranosos de forma concêntrica em torno do
axônio. Eles são capazes de envolver diversos axônios cada uma. As células de Schwann têm
função semelhante, mas são encontradas no sistema nervoso periférico e cada uma se enrola a
somente um internodo do axônio. Os astrócitos, os mais numerosos, se assemelham às estrelas.
Alguns funções deles são: manter a concentração de íons de potássio extracelular; captar e
remover transmissores químicos liberados pelos neurônios durante transmissão sináptica;
participar da criação de um revestimento especial e impermeável, dos capilares e vênulas
celebrais, criando uma barreira hematoencefálica que impede o acesso de substâncias tóxicas ao
cérebro; formar pés terminais sobre a superfície de nervos do sistema nervoso (KANDEL et al.,
2000).
2.5 O Potencial de Ação
Todas as células do corpo humano possuem um potencial elétrico entre as regiões intracelular e
extracelular. Este potencial elétrico é mantido a aproximadamente -65mV (SPECKMANN e
ELGER, 1998) (Figura 9). Este potencial é chamado de Potencial de Repouso e ele é mantido
pelas concentrações de íons de sódio (Na+), de potássio (K+), de cloro (Cl-) e anions orgânicos
(A-). Essas concentrações fazem com que o lado interno da célula possua um potencial mais
negativo que o lado externo, Em células nervosas, este potencial de repouso varia entre -40mV a
-80mV (tendo o meio externo como referência). Já em células musculares, ele fica em torno de 90mV (BEAR et al., 2002).
16
Figura 9: Potencial de Repouso em uma célula nervosa (BEAR et al. 2002)
A Tabela 1 mostra as diferentes concentrações de íons no axônio gigante de lula. Nos
vertebrados, esse gradiente de concentração é mantido de maneira semelhante. E para que seja
mantida esta concentração de íons, existem dispositivos que funcionam como bombas de sódio e
potássio que ficam ativas mantendo o fluxo desses íons através da parede da membrana celular.
Pois a tendência devido ao campo elétrico, é de que o equilíbrio elétrico fosse mantido.
Íon
Citoplasma (mM)
Fluido Extracelular
Potencial de Equilíbrio
(mM)
(mV)
K+
400
20
-75
Na+
50
440
+55
Cl-
52
560
-60
A-
385
-
-
Tabela 1: Distribuições de íons na região da membrana celular do axônio gigante de lula
(KANDEL et al., 2000)
Se, por algum motivo, o interior da célula nervosa se tornar mais positiva, o potencial medido
entre os meios intra e extracelular pode atingir o limiar de disparo. Quando isso ocorre, há uma
repentina variação do potencial de membrana, que pode chegar a +40mV. Posteriormente, o
potencial volta ao estado original de repouso. A esse fenômeno damos o nome de Potencial de
ação (Figura 10).
17
Figura 10: O Potencial de Ação (KANDEL et al., (2000)).
O potencial de ação é gerado por influxo súbito de sódio, por meio de canais de sódio voltagemdependente. Esses canais são moléculas protéicas especializadas, inseridas através da bicamada
lipídica da membrana (KANDEL et al. Bear et al., 2002). Quando a membrana celular é
despolarizada (potencial de membrana passa de -65mV a -55mV), ocorre uma permeabilidade
muito grande aos íons de Na+ (sódio) se comparado a dos íons de K+ (potássio). A variação do
potencial de membrana abre canais de sódio, permitindo que haja um influxo de sódio,
responsável pelo abrupto crescimento deste potencial na rampa de subida. O segmento inicial do
axônio possui uma alta densidade de canais de sódio voltagem-dependente. Assim, à medida que
um sinal de entrada progride, até o cone axônico, ele irá, desde que exceda o limiar de disparo,
gerar um ou mais potenciais de ação tudo-ou-nada. Essa região é então chamada de zona de
gatilho do neurônio. Ao ser gerado na zona de gatilho, esse potencial tudo ou nada trafega,
mantendo as suas características, até a terminação que se dá na célula alvo.
2.6 Sinapses Elétricas e Sinapses Químicas
Um impulso é transmitido de uma célula a outra através das sinapses (do grego synapsis, ação de
juntar). A sinapse é uma região de contato muito próximo entre a extremidade do axônio de um
neurônio e a superfície de outras células. Estas células podem ser tanto outros neurônios como
células sensoriais, musculares ou glandulares. As terminações de um axônio podem estabelecer
18
muitas sinapses simultâneas. Na maioria das sinapses nervosas, as membranas das células que
fazem sinapses estão muito próximas, mas não se tocam.
2.6.1 Sinapses Elétricas
Descritas primeiramente na sinapse motora gigante do lagostim (KANDEL et al., 2000), as
sinapses elétricas geralmente ocorrem entre uma grande fibra nervosa pré-sináptica e um pequeno
neurônio pós-sináptico, pois é necessária uma grande quantidade de corrente iônica para
despolarizar a célula pós-sináptica devido a sua maior resistência elétrica. A latência entre o
potencial de ação pré-sináptico e o pós-sináptico é muito curta (KANDEL et al., 2000) (Figura
11).
Essa latência é muito menor que a latência de uma transmissão química, pois ela depende
somente da passagem de corrente elétrica da célula pré-sináptica para a célula pós-sináptica. Isso
é importante para situações em que se exige resposta rápida ao perigo. Em certos animais,
existem agrupamentos de neurônios que juntos, se comportam como uma grande célula com um
alto limiar de disparo, que se ultrapassado, desencadeia uma reação explosiva do tipo tudo-ounada.
Figura 11: Latência da Sinapse Elétrica
19
2.6.2 Sinapses Químicas
A transmissão sináptica química pode ser dividida em duas fases: pré-sináptica e pós-sináptica.
Na transmissão pré-sináptica, o processo se assemelha ao processo de liberação de uma glândula
endócrina, como uma secreção hormonal. Ao atravessar o axônio e chegar ao terminal nervoso, o
potencial de ação faz com que pequenos canais de Ca2+ dependentes de voltagem se abram nas
zonas ativas.
O influxo de sódio faz com que pequenas vesículas, que estão repletas de
neurotransmissores, se fundam com a membrana da célula pré-sináptica e liberem os chamados
mediadores químicos na fenda sináptica. Os mediadores químicos acoplam-se com receptores
específicos presentes na membrana das células pós-sinápticas. Assim, os receptores permitem o
influxo de Cálcio (Ca2+) através da membrana, sendo que quanto mais cálcio entrar pela região
pós-sinápticas, mais ela será despolarizada. Se a despolarização for suficiente para atingir o
limiar, ela vai provocar o surgimento do potencial de ação na célula pós-sináptica desencadeando
o impulso nervoso (Figura 12).
Figura 12: Transmissão química (KANDEL et al., 2000).
O potencial pós-sináptico criado pode ser tanto excitatório, ou seja: favorecer o surgimento de
potencial de ação ao se atingir o limiar no receptor; como podem ser inibitórios, ou seja: ao invés
de despolarizar a região pós-sináptica, eles a hiperpolarizam, dificultando o surgimento do
potencial de ação, fazendo com que o potencial elétrico no receptor se afaste do limiar. Um
mesmo neurônio, muitas vezes, possui em seus dendritos tanto botões sinápticos excitatórios
20
como inibitórios, e é a atividade conjunta deles é que vão determinar o comportamento deste
neurônio.
Já se identificaram mais de dez substâncias que atuam como neurotransmissores, como a
acetilcolina, a adrenalina (ou epinefrina), a noradrenalina (ou norepinefrina), a dopamina e a
serotonina. As propriedades químicas dos receptores é que vão determinar qual neurotransmissor
é reconhecido por ela e qual a conseqüência da ação desse neurotransmissor. A acetilcolina é um
neurotransmissor que, dependendo do receptor, pode causar potencial pós-sináptico tanto
excitatório quanto pós-sináptico inibitório.
A transmissão química envolve as seguintes etapas:
A Liberação de um transmissor a partir do neurônio pré-sináptico
Difusão do transmissor para a célula pós-sináptica
A fixação ao receptor específico
Mobilização dos canais iônicos
2.6.3 Codificação dos Potenciais de Ação
A intensidade de um estímulo é codificada através de trem de potenciais de ação que são
modulados em freqüência. A quantidade de potenciais gerados está diretamente relacionada com
a liberação de mediadores químicos (Figura 13). Se o estímulo ultrapassar o limiar de disparo do
potencial de ação, potenciais de ação serão gerados. Quanto mais o estímulo ultrapassa o limiar,
maior será a freqüência de geração de potenciais de ação. Assim a freqüência é proporcional à
amplitude do estímulo. Se por outro lado, a duração do estímulo aumenta, também aumenta a
duração do trem de potenciais de ação de forma que a duração do trem de potenciais de ação é
proporcional à duração do estímulo que o provoca. De qualquer maneira, a forma e amplitude dos
potenciais de ação são preservadas independentemente das alterações ocorridas nos estímulos.
21
Figura 13: Transformação de estímulo físico em atividade elétrica com conseqüente liberação de mediadores
químicos em sinapses químicas (KANDEL et al., 2000).
2.7 Propriedades Elétricas dos Neurônios
O potencial de ação é influenciado pelo diâmetro além de outras propriedades passivas da
membrana do neurônio. A velocidade de propagação do potencial de ação é um fator muito
importante. Ela varia com o produto da resistência axial pela capacitância por comprimento do
axônio.
Vp ∝
1
ra • cm
(1)
22
Onde:
Vp é a velocidade de propagação
ra é a resistência longitudinal do axônio
cm é a capacitância por unidade de comprimento do axônio em
Faraday/centímetro (KANDEL et. Al, 2000).
Uma das formas de aumentar a velocidade de propagação se dá pelo incremento do diâmetro do
cerne axônico (BRODAL, 1984). Quanto maior o seu diâmetro, menor será a resistência
longitudinal. Mesmo que a capacitância por centímetro aumente com o diâmetro contribuindo
para diminuir a velocidade de propagação, a resistência axial diminui com o inverso do quadrado
do raio do axônio e o efeito final será uma velocidade maior.
Com a evolução dos seres vivos, a densidade de neurônios se tornou muito grande. Assim, a
estratégia de aumentar o diâmetro do axônio ficava limitada por questões de espaço físico. Em
seres vivos mais evoluídos, surgiu outra forma de aumentar a velocidade dos potenciais de ação.
Esta se dá por um processo chamado mielinização dos axônios. Nesse processo, os axônios são
envoltos por células especiais citadas anteriormente: os oligodentrócitos (no sistema nervoso
central) e as células de Schwann (no sistema nervoso periférico) Com o processo de mielinização,
a capacitância por comprimento diminui muito. Assim o produto ra*cm cai drasticamente e a
velocidade de propagação aumenta.
2.7.1 Os Nodos de Ranvier
Para que os potenciais de ação percorram a extensão do axônio sem perder a sua forma, a cada 1
ou 2 mm, a bainha de mielina é interrompida pelos chamados Nodos de Ranvier. Na região dos
nodos ficam descobertos 0,2 µm(Figura 14). Nessa região há uma grande quantidade de canais de
sódio (Na+) voltagem-dependente, que podem gerar um influxo despolarizante de Na+ , fazendo
assim com que funcionem como amplificadores reguladores do potencial de ação, regenerando-os
até que eles cheguem ao sítio de atuação.
23
Figura 14: O nodo de Ranvier localizado no axônio (BEAR et al. 2002)
A falta de mielina pode ser causada por doenças como, por exemplo, a esclerose múltipla que
causa o retardo na condução do potencial de ação, além de provocar uma atenuação do mesmo.
Às vezes, chega a ocorrer o bloqueio na condução dos potenciais de ação (BEAR et al. 2002).
2.8 A Atividade Elétrica Cerebral: Potenciais Elétricos Gerados no
Cérebro
Como descrito no item 2.1, o sistema nervoso central é dividido em: dois hemisférios cerebrais
(cérebro), o diencéfalo, o mesencéfalo, o cerebelo, a ponte, o bulbo, e a medula espinal. Os
nervos que atravessam a ponte transportam potenciais de ação advindos tanto do encéfalo como
da medula espinal.
O cérebro, além de receber potenciais de ação de diversas partes do sistema nervoso periférico,
possui alta atividade elétrica. O córtex cerebral possui uma área em torno de 1600cm2 e um
número de aproximadamente 1010 neurônios (e dez vezes mais de células gliais, ou seja, 1011).
Além disso, o córtex cerebral é uma região extremamente interconectada. Estima-se que um
único neurônio pode estar coberto por 103 a 105 sinapses que recebem informações advindas de
outros neurônios (KANDEL et. al., 2000). Muitas das nossas atividades conscientes provocam
interações nos neurônios da região cortical do cérebro. A maioria dos potenciais elétricos que
24
podem ser captados no couro cabeludo através do Eletroencefalograma tem a origem na atividade
sináptica das células piramidais.
A região do córtex cerebral corresponde à massa cinzenta que compõe a porção externa do
cérebro (Figura 15). Ela possui uma espessura praticamente uniforme de aproximadamente
4 mm. Essa região é composta predominantemente dos corpos celulares (soma) e pode ser
divididos em várias subcamadas, cada uma com diferentes tipos de células nervosas, chegando a
ter mais de 40 tipos diferentes de neurônios corticais. Podemos, no entanto, dividir os neurônios
do córtex como: Neurônios de projeção e Interneurônios. Os primeiros são aqueles com corpos
celulares com forma piramidal (camadas III, V e VI na Figura 15), já os Interneurônios são
localizados em todas as camadas.
Figura 15: Arquitetura do neocortex do cérebro (KANDEL et al., 2000).
25
Quanto à forma, as células nervosas encontradas no córtex são predominantemente:
1. Células piramidais e as fusiformes
2. Células granulosas, destinadas a receberem os impulsos aferentes.
Logo abaixo do córtex está a substância branca, que contém predominantemente, fibras
Nervosas (axônios). A substância branca pode ser comparada a um enorme e complicado sistema
de conexões bidirecionais ligando o córtex com centros subcorticais (fibras de projeção), com
outras áreas corticais do mesmo hemisfério (fibras associativas) e ainda, ligando centros dos dois
hemisférios entre si (fibras comissurais (KANDEL et al., 2000)). A concentração de fibras na
substância branca é tal que pode haver 107 fibras de entrada em uma área de 1cm2.
A atividade elétrica do cérebro é normalmente dividida em três categorias (NUNEZ, 1981):
•
A atividade espontânea que inclui o ritmo alfa e outros ritmos (posição de repouso);
•
Potencial relacionado a eventos (ERP), que pode ser evocado por estímulos sensoriais,
funções de percepção e cognição (BASAR et al., 1999; HERRMANN et al., 2004).
•
Atividade de potenciais de um neurônio isolado, medidas por micro-eletrodos;
2.9 A Estimulação Somatossensorial
As fibras aferentes primárias possuem diferentes diâmetros e elas transmitem informações de
diferentes sensações à medula espinhal. As fibras também diferem no seu tamanho e velocidade
de condução. Os mecanoreceptores e proprioceptores são inervados por fibras mielinizadas de
grosso calibre, enquanto que receptores térmicos e nociceptores, por fibras finas mielinizadas e
não mielinizadas (Tabela 2, Figura 16).
26
Tipo de Fibra
Nervos
Cutâneos
Diâmetro (µm)
Velocidade de
Condução (m/s)
Grossa
Aα
13-20
80-120
Média
Aβ
6-12
36-75
Fina
Aδ
1-5
5-30
Não
mielinizada
C
0,2-1,5
0,5-2,0
Receptores
Mecanoreceptores
Cutâneos e
subcutâneos
Mecanoreceptores
Cutâneos e
subcutâneos
Térmicos e
Nociceptores
Térmicos e
Nociceptores
Tabela 2: Tipos de Fibras aferentes e os Receptores associados a elas.
Figura 16: Tipos de Fibras e suas características (KANDEL et al., 2000).
A avaliação da velocidade dessas fibras permite o diagnóstico de doenças que causam
degeneração de fibras nervosas. O exame clínico baseia-se na análise de potenciais de ação
compostos (Figura 17). As velocidades de condução dos nervos periféricos podem ser
27
clinicamente avaliados a partir de potenciais de ação compostos após estimulação elétrica com
diferentes intensidades, que ativam distintas populações de fibras nervosas. Podem-se verificar
pela latência entre o início do estímulo (eletrodo de estimulação) e o registro (eletrodo de
registro) as respostas das fibras grossas mielinizadas (Aα, Aβ), finas mielinizadas (Aδ) e finas
não mielinizadas (C) (KANDEL et al., 2000).
Figura 17: Potencial de ação composto (KANDEL et al., 2000).
2.9.1 O Eletroencefalograma
Na década de 1920 houve o primeiro registro da atividade elétrica humana, feito por Hans Berger
(KANDEL et al., 2000). Nas décadas seguintes, surgiram os trabalhos de GIBBS & GIBBS
(1952). Atualmente registro digital é feito através da aquisição em hardwares através de
conversores analógico/digital (A/D). O Eletroencefalograma (EEG) é uma ferramenta muito
utilizada na medicina como auxílio no diagnóstico de doenças relacionadas ao Sistema Nervoso.
Ele é constituído de um conjunto de muitos traços irregulares simultâneos que indicam alterações
nos potenciais elétricos entre os diversos pares selecionados, permitindo assim visualizar a
atividade do córtex cerebral através da medida desses potenciais da ordem de microvolts no
escalpo ou couro cabeludo. A Figura 18 representa o registro de EEG de uma paciente com
epilepsia no lobo temporal, que se evidencia na alteração dos traços a partir do segundo quarto do
registro. Esses potenciais são captados por eletrodos distribuídos através do escalpo através de
um gel condutor que assegura uma baixa resistência elétrica na conexão desses eletrodos. A
28
atividade elétrica pode ser avaliada espacialmente. De acordo com os pares escolhidos, podem ser
avaliadas diferentes regiões do encéfalo: anterior, posterior, esquerda e direita. A avaliação destes
sinais elétricos durante a estimulação senoidal é foco de muito estudo por diversos pesquisadores.
Muitos métodos atualmente são utilizados para processar os sinais medidos no escalpo a fim de
se obter uma melhor visualização da atividade elétrica do encéfalo devido à estimulação, sendo o
mais comum deles a média coerente dos sinais de EEG. Através desse método, é possível a
visualização do Potencial Evocado (PE).
Diferentes Técnicas de derivação para o registro de EEG têm sido desenvolvidas. As técnicas
mais utilizadas são: derivação de referência comum (JASPER, 1974), derivação bipolar
(JASPER, 1974) e a derivação da fonte (TIERRA-CRIOLLO et al., 1997; INFANTOSI e
ALMEIDA, 1990; WALLIN e STALBERG, 1980).
Figura 18: Traços de sinais de EEG coletados no couro cabeludo de paciente com epilepsia do lobo temporal;
os números representam os diferentes pares de eletrodos (KANDEL et al, 2000).
O Registro de EEG – Sistema Internacional 10-20
Para o registro do EEG emprega-se como referência o Sistema Internacional 10-20 de colocação
dos eletrodos (MALMIVIUO & PLONSEY, 1995). Na colocação dos eletrodos o couro cabeludo
deverá estar limpo, lavado na véspera ou no dia do exame e os cabelos secos, sem tintura recente
ou gel que possam interferir na obtenção do registro.
29
No sistema 10-20 o posicionamento dos eletrodos segue o seguinte procedimento: no sentido
antero-posterior do escalpo é traçada uma linha baseada na distância entre o nasion e o inion
passando pelo vértex. Cinco pontos são marcados ao longo desta linha, designados como frontal
polar (Fp), frontal (Fz), central (Cz), parietal (Pz) e occipital (Oz). Fp está situado acima do nasion,
na primeira porção de 10% nesta linha. Oz está acima do inion, na última porção de 10% desta
linha. A porção entre Fp e Oz é dividida em quatro partes eqüidistantes, onde são colocados
respectivamente os eletrodos Fz, Cz e Pz (Figura 19).
Figura 19: Método de medida para o encontro das posições dos eletrodos da linha média (SHARBROUGH et
al., 1991).
As medidas laterais são baseadas no plano coronal central (Figura 20). Mede-se inicialmente a
distância entre os pontos pré-auriculares (depressão na raiz do zigoma anteriormente ao trago),
passando pelo ponto central Cz. Nas porções de 10%, acima dos pontos pré-auriculares,
encontramos os pontos temporais T3 e T4. A distância entre T3 e T4 ao longo desta linha é
dividida em quatro porções eqüidistantes (20% da linha para cada porção) onde são posicionados
respectivamente C3, Cz e C4.
30
Figura 20: Visão frontal do posicionamento dos eletrodos centrais em relação ao plano coronal.
Em seguida, determina-se a linha antero-posterior (Figura 21) sobre as regiões frontal, temporal e
occipital medindo-se a distância entre os pontos Fp e Oz, da linha média, passando pelo ponto
temporal T4 previamente marcado. A partir da posição Fp, mede-se uma porção de 10% desta
linha e posiciona-se o eletrodo FP2. Da mesma maneira, a partir de Oz, mede-se uma porção de
10% e posiciona-se o eletrodo O2. A distância entre FP2 e O2 é dividida em quatro porções
eqüidistantes. (20% da linha para cada porção), onde são localizados respectivamente os
eletrodos F8, T4 e T6. O mesmo procedimento é utilizado para posicionar os eletrodos FP1, F7, T3,
T5 e O1.
Para haver diferenciação entre as posições homólogas, os números pares referem-se aos eletrodos
do lado direito e os números ímpares, aos do lado esquerdo. Os eletrodos da linha média são
seguidos da letra z (zero): Fz, Cz, Pz e Oz.
31
Figura 21: Vista superior dos eletrodos da linha temporal bem como dos eletrodos F3 e F4 e P3 e
P4(SHARBROUGH et al., 1991).
Os eletrodos frontais F3 e F4 são posicionados ao longo da linha coronal frontal (que passa por
Fz) dividindo-a em porções eqüidistantes entre F7 e F8 (quatro porções de 20%). Da mesma
maneira, os eletrodos parietais P3 e P4 são posicionados ao longo da linha parietal (que passa por
Pz), dividindo-a em porções eqüidistantes entre T5 e T6 (cada uma medindo 20% do tamanho da
linha).
Em adição aos 19 eletrodos do padrão internacional 10-20, eletrodos intermediários a 10%
também são utilizados. A localização e nomenclatura desses eletrodos são padronizadas pela
Sociedade Americana de Eletroencefalografia (SHARBROUGH et al., 1991). Nesta
recomendação, os eletrodos T3, T4, P3 e P4 mudam de nome e são chamados respectivamente de:
T7, T8, P7 e P8. Esses eletrodos estão representados em preto na Figura 22.
32
Figura 22: Localização e nomenclatura dos eletrodos intermediários, padronizado pela Sociedade Americana
de Eletroencefalografia (American Electroencephalographic Society).
(SHARBROUGH et al., 1991).
Como descrito anteriormente, a região de interesse para a estimulação somatossensorial é o
chamado córtex somatossensorial. Nesta região estão os canais: Cz, T3, T4, C3 e C4. Próximos a
esta região são localizados os canais CP3 e CP4.
A Resposta Evocada
Ela consiste de uma série de picos em resposta a um determinado estímulo e ocorre no sistema
nervoso central como conseqüência da estimulação dos receptores sensoriais, ou de algum ponto
na via sensorial condutora do receptor até o córtex. O estímulo evocado pode ser auditivo (PE
auditivo), somatossensorial (PE somato-sensoriais), ou visual (PE visuais), embora outras
modalidades tenham sido descritas. Potenciais relacionados com eventos às vezes são usados
como sinônimos de potenciais evocados, sendo freqüentemente associados com a execução de
uma tarefa motora, cognitiva ou psicofisiológica (MISSULIS, 1994).
33
Os potenciais evocados somato-sensoriais podem ser obtidos através da análise em regime
permanente (steady-state) e em regime transitório. Em regime permanente, a estimulação é feita
através de um sinal que varia continuamente (por exemplo, uma senoide). O método mais
utilizado utiliza uma senoide com sua Amplitude Modulada (AM) (NOSS et al., 1996). A
duração do estímulo é da ordem de dezenas de segundos. A análise da resposta em regime
permanente é realizada geralmente no domínio da freqüência (NOSS et al., 1996). No regime
transitório, a estimulação somatossensorial se dá através de uma seqüência de pulsos elétricos
com duração entre 100µS e 300µS (MAUGUIÈRE et al, 1998; NOOS et al, 1996) e freqüência
entre 1 e 30 Hz (MANZANO et al., 1995). A estimulação pode conter de centenas a milhares de
pulsos (MISSULIS, 1994; NUNES, 1981). O PE é obtido realizando-se a média coerente dos
trechos coletados. Quanto maior o número de estímulos realizados, melhor será a visualização do
PE obtido (NOOS et al, 1996).
O PE poderia ser estimado utilizando estímulos com corrente senoidal em diferentes freqüências,
que estariam associadas a diferentes grupos de fibras nervosas. Freqüência de 5 Hz estimularia as
fibras amielínicas, a freqüência de 250 Hz, as fibras mielinizadas finas e a de 2 kHz as fibras
mielinizadas de grosso calibre. As evidências de que tais premissas sejam verdadeiras estão
sujeitas a discussão. Em trabalhos clínicos, enquanto alguns autores têm encontrado uma
correlação entre funções relacionadas às fibras finas e o limiar para correntes a 5 Hz (MASSON
et al., 1989; Ro et al., 1989), outros não conseguiram estabelecer a mesma correlação (TACK et
al., 1994; VINIK et al., 1995).
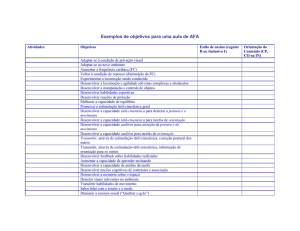
A Figura 23 representa um PE onde AP e AN representam as amplitudes dos picos e vales
(observar que na literatura médica, os picos na verdade são os máximos negativos e os vales, os
máximos positivos); LN e LP representam as latências em milissegundos, em relação ao início do
estímulo.
34
35
LN2
30
25
20
AN2
Amplitude
15
LN1
10
5
AP2
0
LP1
-5
AP3
-10
LP2
-15
LP3
-20
0.4
0.5
0.6
0.7
0.8
0.9
tempo(s)
1
1.1
1.2
1.3
1.4
Figura 23: O Potencial evocado a estímulo somatossensorial
O Potencial evocado pode ser definido mediante suas características principais que são
(MISSULIS, 1994; REGAN, 1989a; NUNEZ, 1981):
•
Polaridade positiva ou negativa dos picos;
•
Número de ondas
•
Latência dos picos positivos e negativos
•
Amplitude e
•
Forma de onda;
Intensidade de Estimulação e Limiar de Sensibilidade
A intensidade de corrente para a estimulação tem como referência o Limiar de Sensibilidade
(LS), que é o nível de corrente identificado pelo voluntário (TIERRA-CRIOLLO, 2001;
MAUGUIÈRE, 1998). Este Limiar varia para cada voluntário devido aos seguintes fatores:
condutância da região a ser estimulada e o próprio processo cognitivo individual da percepção da
35
corrente elétrica aplicada. Assim, o primeiro passo para o início do experimento é definir o limiar
de sensibilidade para cada voluntário. Muitos investigadores utilizam intensidade de estimulação
entre 2 e 4 vezes o LS (e.g, MANZANO et al, 1995) e outros o limar motor (movimento
involuntário dos músculos) (e.g. TIERRA-CRIOLLO e INFANTOSI, 2006).
36
Capítulo 3: Métodos Para Obtenção do Potencial Evocado
Neste capitulo serão abordados três ferramentas utilizados no auxílio para a obtenção do PE neste
trabalho. A primeira é denominada média coerente dos trechos sincronizados com o estímulo
(MISULIS, 1994). Este é o método clássico para a obtenção do PE. A segunda ferramenta é uma
alternativa à média coerente. Ela é chamada de Árvore de permuta cíclica utilizando a remoção
de ruídos através de Wavelet sendo proposta por CAUSEVIC et al., (2005) para a remoção de
ruídos de altas freqüências associados aos sinais de EEG. Já a ferramenta de ICA utilizando
dados estatísticos de segunda ordem com robusta ortogonalização - SOBI-RO (BELOUCHRANI
et al, 1997; BELOUCHRANI et al., 2000) é utilizada como pré-processamento para a remoção de
artefatos, principalmente o artefato ao estímulo de 5 Hz e bandas de freqüências entre 8 e 10 Hz
para esta estimulação.
3.1 A Média Coerente
De acordo com o modelo tradicional, o PE é um sinal gerado por populações neuronais que têm
atividade sincronizada aos estímulos, estando superposto aditivamente ao EEG espontâneo
(LOPES DA SILVA, 1998).
Podemos modelar um trecho do sinal de EEG coletado no couro cabeludo no intervalo onde
ocorreu a estimulação como sendo x(t). Ele é constituído pela soma do sinal determinístico s(t)
(potencial evocado) e o ruído aleatório de média zero ru(t) que modela o EEG espontâneo
(expressão 2):
x( t ) = s( t ) + ru( t )
(2)
Se aplicarmos a esperança matemática em x(t) o resultado será o PE s(t):
E[ x(t )] = E[s(t ) + ru(t )] = E[s(t )] + E[ru(t )] = s(t )
(3)
37
Pois a esperança matemática do ruído será zero e a esperança de s(t) é o próprio s(t). Na prática,
um único trecho de EEG não permite a visualização da potencial evocado. Portanto, é necessário
coletar vários trechos de EEG durante estimulação. Os trechos são sincronizados pelo início de
cada estímulo e obtém-se a média visando remover artefatos e ruídos que não estão relacionadas
com o (PE) (MISSULIS, 1994). Está técnica para estimar o potencial evocado é conhecido como
média coerente e pode ser expressa por:
1 N
sˆ(t) = ∑xi (t)
N i =1
(4)
onde N é o número de trechos, xi(t) é o sinal EEG do trecho i e sˆ(t ) é o valor estimado do PE.
O valor esperado de sˆ(t ) é o PE s(t):
E{ ŝ( t )} =
1
Ns( t ) = s( t )
N
(5)
A variância de sˆ(t ) será função da variância do ruído e do número de trechos, como mostra a
expressão 6. Assim, ao aumentar o número de trechos, incrementa-se a relação sinal ruído (RSR),
sendo que para N → ∞ , var[sˆ(t 0] → 0 e assim, sˆ(t ) → s (t ) .
1
1 N
1 N
var { sˆ(t)} = var ∑xi (t) = 2 ∑ var[xi (t)] = var[ru(t) ]
N
N i=1
N i=1
(6)
O incremento da RSR pode ser representado em dB como (CAUSEVIC et al., 2005):
RSR( dB ) ∝ 10 log 10 N
(7)
Considerando a amplitude do EEG coletado no escalpo entre 60 µV e 100 µV, e a amplitude do
PE entre 0,1 µV e 20 µV(CHENG et al. 1999), a RSR do PE pode estar na ordem de -60 dB.
38
Assim, será necessário um grande número de estímulos para se obter uma boa visualização do
potencial evocado com a média coerente. Visando a reduzir o número de estímulos para obter um
PE com uma RSR adequada, outros métodos alternativos podem ser utilizados (CAUSEVIC et
al., 2005;).
3.2 Análise com Remoção de Ruídos Wavelet
A transformada Wavelet se tornou o foco de muitas pesquisas relativamente recentes, e ela tem
atraído grande interesse da comunidade que trabalha com processamento de sinais (MISITI et al.,
2006). O conceito de Wavelet foi proposto pela primeira vez por Jean Morlet (1975) e pela
equipe de pesquisadores de Alex Grossman, trabalhando no Centro de Física Teórica de
Marseille na França (MISITI et al., 2006).
A wavelet é uma forma de onda que tem duração limitada que decai rapidamente para zero. Se
compararmos a forma de onda das Wavelets com a forma de onda do seno (Figura 24), veremos
que existem diferenças importantes entre elas. A primeira delas é que as senoide não possuem
duração limitada, ou seja, elas vão de menos infinito até mais infinito. Outra diferença é que as
senoides são formas suaves e previsíveis enquanto as Wavelet tendem a serem irregulares.
A análise de Fourier consiste em decompor um sinal em conjuntos de várias ondas senoides de
freqüências diferentes. De forma semelhante à análise em Wavelets secciona um sinal em versões
transladadas e escalonadas de uma determinada Wavelet padrão, chamada de Wavelet-Mãe. A
Figura 24 mostra a função seno utilizada na transformada de Fourier e uma função Wavelet
utilizada na transformada Wavelet, (MISITI et al., 2006).
Figura 24: Formas de onda de uma senoide e de uma Wavelet (MISITI et al., 2006).
39
A transformada contínua de Wavelet é definida como:
1
CWT ( b , a ) =
a
∞
∫ x( t ).ψ * (
−∞
t −b
).dt
a
(8)
Onde: a representa a dilatação
b representa o deslocamento ou translação
ψ representa a função Wavelet
A Transformada Contínua Wavelet (CWT) é representada em termos discretos em que x(t) se
torna x[n], como sendo (expressões 9 e 10):
N −1
C( j, k) = ∑x[n]ψ j,k [n]
(9)
n=0
onde
−
j
ψ j,k [n] = 2 ψ (2− j n − k)
2
(10)
j está associado à dilatação e k, à translação (DINIZ, 2004). Esta transformada não requer o
conhecimento a priori do tamanho e periodicidade do sinal. As informações no tempo são dadas
pelos coeficientes da transformada C(j,k) (CAUSEVIC et al., 2005):
3.2.1 A Transformada Discreta de Wavelet
A transformada contínua de Wavelet exige um custo computacional grande, assim foi introduzido
por (MALLAT, 1989) a transformada discreta de Wavelet. Nela, são escolhidas escalas múltiplas
da potência de 2, chamadas posições e escalas (diádica - dyadic). Pode-se fazer uma analogia
40
entre o algoritmo de decomposição diádico e o uso de um banco de filtros, conceito vindo da
teoria geral de processamento de sinais (MISITI et al., 2006).
Na transformada discreta de Wavelet, o sinal s é submetido a dois filtros (Figura 25), um passa baixa e outro passa - alta, gerando, respectivamente, os sinais de aproximação e detalhe
(SAMAR et al., 1999; MISITI et al., 2006). Assim, a aproximação possui os coeficientes que
representam as baixas freqüências. Em muitas aplicações, a aproximação detém a maior parte das
informações do sinal enquanto o detalhe contém grande quantidade de ruído de altas freqüências.
Figura 25: Principio da transformada discreta de wavelet (MISITI et al., 2006).
Os vetores dos coeficientes da Aproximação (A) e Detalhes (D) resultantes podem ser expressos
como sendo:
M
A j +1 (k ) = ∑ L (m − 2k ) A j (m)
(11)
m =1
M
D j +1 (k ) = ∑ H (m − 2k ) A j (m)
(12)
m =1
onde L representa o filtro passa - baixa e H representa o filtro passa - alta (filtros de análise)
(DINIZ et al., 2004). Para j=0, A será o sinal original s.
As envoltórias das respostas ao impulso dos filtros H e L de análise representam expansões e
contrações de uma função wavelet e de escalamento, respectivamente, em cada nível k de
detalhamento (DINIZ et al., 2004).
41
Após passar pelo banco de filtros, os sinais sofrem uma reamostragem e passam a ter metade do
tamanho original. Por exemplo, se o sinal s original possui 1000 amostras, os sinais cD e cA
resultantes possuem 500 amostras cada (Figura 26).
Figura 26: A transformada discreta com a sub-amostragem (MISITI et al., 2006).
A Figura 27 exemplifica a aplicação da transformada wavelet em uma senoide com adição de
ruído. Observa-se que em cD é visto somente ruído enquanto que em cA, a senoide se apresenta
com uma melhor RSR.
Figura 27: A TDW para um sinal senoidal com ruído associado (MISITI et al., 2006).
A transformada discreta de Wavelet pode ser aplicada a vários níveis. Na prática, o limite está
relacionado com a natureza do sinal, ou em algum critério quantitativo baseado na entropia do
sinal (MISITI et al, 2006). Na Figura 28, há um exemplo da aplicação da decomposição em até
três níveis, sendo gerados os vetores cA3 e cD3 cujo tamanho é equivalente ao tamanho de s/23.
Ou seja, se s possui 1000 amostras, cA3 e cD3 teriam 125 amostras cada. Esse método também é
42
chamado de Análise de Multi-resolução (Multi-Resolution Analysis-MRA) (MALLAT, 1988;
MALLAT, 1989).
Figura 28: A TDW para múltiplos níveis. Neste caso, para três níveis (MISITI et al., 2006).
3.2.2 A Transformada Discreta Inversa de Wavelet
A transformada inversa de Wavelet (síntese) consiste em percorrer o caminho inverso na seguinte
seqüência: primeiramente, realiza-se a sobre-amostragem dos vetores de coeficientes,
intercalando um valor de zero entre dois coeficientes, como mostra a Figura 29. Em seguida,
aplicam-se os filtros passa baixas L’ e passa-altas H’(filtros de síntese) aos coeficientes cAn e cDn
respectivamente (onde n é o nível do detalhamento da transformada). Finalmente, somam-se os
vetores resultantes. A Figura 30 exemplifica a transformada inversa de Wavelet para o caso em
que o nível de detalhamento é dois. Assim, cA2 passa por um filtro passa-baixas L’ e cD2 passa
por um passa-altas H’ e em seguida são somados. O resultado cria cA1 que passará novamente
por um L’ enquanto o cD1 está passando por um H’. Em seguida eles são somados e o resultado é
o vetor original s. Se a família de Wavelet utilizada é ortonormal, os filtros de síntese são
idênticos aos filtros de análise (DINIZ et al., 2004).
43
Figura 29: A sobre-amostragem com inclusão de zeros
Figura 30: Processo completo da TDW direta (Análise) e inversa (Síntese)
3.2.3 A Remoção de Ruídos com Wavelet
Nas últimas décadas, as transformadas Wavelet têm sido aplicadas a um número cada vez maior
de problemas ligados direta ou indiretamente à área de processamento de sinais. Das várias
aplicações pode-se citar a remoção de ruídos (denoising) em sinais, bem como a compressão,
detecção e reconhecimento de padrões (CARRÉ et al., 2000, MISITI et al, 2006, DINIZ et al.,
2001). Neste trabalho, a remoção de ruídos é utilizada para melhorar a relação sinal/ruído da
potencial evocado em sinais de EEG.
A remoção de ruídos utilizando Wavelet foi primeiramente apresentada por Donoho (DONOHO,
1995). Esta técnica é aplicada ao vetor de coeficientes de detalhes resultantes da transformada
Wavelet. O procedimento consiste em escolher quais desses coeficientes serão mantidos para
preservar a informação do sinal, retirando, então, os coeficientes relacionados ao ruído.
44
Existem duas formas de fazer a escolha dos coeficientes. A primeira é chamada de hard
thresholding e a segunda, de soft thresholding. Para o hard thresholding os coeficientes do
detalhe cDjk cujos módulos estão abaixo do limiar são zerados (expressão 13).
cD ,
cD jk ≤ δ
cD' jk = jk
contrário
0, caso
(13)
Já para o soft thresholding, que é considerado uma extensão do hard thresholding, os coeficientes
cujos módulos estão abaixo do limiar também são zerados. Porém, os coeficientes com módulos
acima do limiar terão seus módulos subtraídos o valor do limiar, mantendo o seu sinal (expressão
14).
sign(cD jk )( cD jk − δ ),
cD jk ≤ δ
cD' jk =
caso
contrário
0,
(14)
A Figura 31 ilustra a remoção de coeficientes através do hard thresholding, e através do soft
1
1
0.8
0.8
0.6
0.6
0.4
0.4
Coeficientes Estimados
Coeficientes Estimados
thresholding. Os coeficientes dos detalhes estão normalizados e o limiar δ=0.3.
0.2
0
-0.2
-0.4
0.2
0
-0.2
-0.4
-0.6
-0.6
-0.8
-0.8
-1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
Coeficoentes Originais
0.4
0.6
0.8
1
-1
-1
(a)
-0.8
-0.6
-0.4
-0.2
0
0.2
Coeficientes Originais
0.4
0.6
0.8
1
(b)
Figura 31: O (a) hard-thresholding e o (b) soft-thresholding
Suponhamos um sinal y(t) composto de uma componente que se quer extrair, adicionada de um
ruído onde predominam altas freqüências, ru(t).
45
y( t ) = x( t ) + ru( t )
(15)
Para remover o ruído, ru(t), do sinal y(t), é necessário determinar um limiar δ vinculado ao vetor
de detalhe de y(t). Os coeficientes desse vetor que forem menores que δ serão zerados e os outros
serão mantidos ou processados conforme o modelo de remoção escolhido (hard ou soft
thresholding). Assim, espera-se que ruídos sejam eliminados obtendo-se uma melhor estimativa
de x(t).
3.2.3.1 A Escolha do Limiar Para a Remoção de Ruídos
A escolha do limiar é feita baseado numa generalização do método SURE (Stein’s Umbiased
Estimate of Risk) feito por Donoho (DONOHO, 1995). Este método considera o termo ru(t) na
equação 15 como sendo um ruído gaussiano de média zero e variância unitária. Nessa situação,
podemos estimar o limiar como:
δ = σ 2 log( n )
(16)
onde n é o número de amostras do sinal, σ = MAD / 0.6745 , MAD representa a mediana dos
valores absolutos dos coeficientes do detalhe da transformada Wavelet no seu nível de maior
detalhe (vetor de detalhe no primeiro nível da transformada discreta). Ou seja:
MAD = mediana(cD1,1 )
(17)
onde cD1,1 é o detalhe no nível 1, que contém as altas freqüências do sinal. Espera-se que os
coeficientes associados ao ruído estejam mais presentes nesse nível.
A Remoção de Ruídos com Wavelet pode ser sintetizada nos seguintes passos:
• Faz-se a Transformada Wavelet;
46
• Escolhe-se um limiar δ para remoção de ruído a ser calculado a partir dos coeficientes do
vetor de detalhes;
• Os coeficientes cDjk ≤δ que representariam o ruído são zerados e os coeficientes cDjk >δ
são ajustados, de acordo com o soft thresholding.
• Faz-se a Transformada Inversa de Wavelet
Para sinais com RSR acima de 10 dB a remoção de ruídos convencional com Wavelet tem-se
mostrado eficiente (CAUSEVIC et al. 2005). Porém, para sinais com baixa RSR, como é o caso
da potencial evocado, este método não seria adequado, porque ao ajustar os coeficientes cDjk ≤δ
com valor zero, poderiam ser removidos coeficientes que contém informação da morfologia da
potencial evocado. Assim, um método alternativo de remoção com Wavelet foi proposto, baseado
no mesmo conceito com soft threshoding, mas associado também à média coerente de pares de
trechos de dados de EEG (CAUSEVIC et al. 2005).
3.2.4 Método da Árvore de Permuta Cíclica (CSTD)
Este método foi proposto por CAUSEVIC et al. (2005) e consiste em aplicar a remoção de ruídos
na média coerente de pares de trechos em vários níveis (Figura 32). O limiar, δ, é estimado para
cada nível do ciclo CSTD, como descrito abaixo:
• Para obter o nível k=2, é estimado um δ1 inicial para cada média de pares de trechos do
nível 1, utilizando a expressão 18. Então a remoção dos coeficientes do vetor de detalhe é
feita com base neste limiar
• Para obter os níveis seguintes k, é estimado um limiar δk em função de δ1 para cada par de
trechos, de acordo a:
δk= δ1*2-k/2 (CAUSEVIC et al., 2005)
(18)
então, é feita a remoção dos coeficientes do vetor de detalhe.
47
A cada nível, ocorre uma permuta dos pares de trechos a serem pro mediados. No final do
processo todos os trechos serão utilizados. De forma que se não houvesse a remoção de ruído
cada trecho final (nível 4 da Figura 32) corresponderia à média coerente dos trechos do sinal
original. Este método tem-se mostrado muito eficiente quando as freqüências associadas ao ruído
são mais altas do que as freqüências associadas ao potencial evocado (CAUSEVIC et al. 2005).
Neste trabalho, será utilizada a wavelet Daubechie 2 sugerido por CAUSEVIC et al. (2005) e o
algoritmo foi desenvolvido no ambiente MATLAB 7.0 utilizando algumas funções do ToolBox
Wavelet.
Figura 32: CSTD aplicada a 8 trechos
.3.3
A Análise em Componentes Independentes (ICA)
A análise em componentes independentes (ICA) surgiu na década de 1980, como ferramenta para
modelagem de redes neurais (HYVÄRINEN et al., 2001). Em meados de 1990, novos algoritmos
de ICA foram introduzidos por vários grupos de pesquisas e desde então é muito usada em
48
problemas reais como processamento de sinais biomédicos e outras áreas da ciência. A aplicação
de ICA ao problema de separação cega das fontes (Blind Source Separation-BSS) em sinais de
EEG tem-se mostrado bem promissor (MAKEIG et al., 1996; MAKEIG et al., 1997).
A ICA busca sinais (sn) em que seja maximizada a independência estatística entre eles. Esta
análise assume que os sinais medidos nos sensores, xm, formem uma combinação linear dos
sinais sn:
x1 ( t ) = a11 s1 ( t ) + ... + a1 n s n ( t )
x 2 ( t ) = a 21 s1 ( t ) + ... + a 2 n s n ( t )
:
.
x m ( t ) = a m 1 s1 ( t ) + ... + a mn s n ( t )
(19)
A expressão 19 pode ser reescrita da seguinte forma: x = A . s. Onde A é a matriz dos
coeficientes da combinação linear. O que se propõe é: dado os sinais xm encontrar a matriz
inversa de A (W = A-1) utilizando algum método de otimização. Então, a partir de W
determinam-se as componentes independentes sn de acordo com:
s=W.x
(20)
Assumindo-se que x pode ser escrito na forma:
x = A.s + n
(21)
onde: x é um vetor de dados coletados por m sensores;
A é uma matriz de mistura com m por n coeficientes;
s é um vetor que representa os sinais independentes;
n representa um vetor de ruído branco com média zero e variância constante;
49
Vários métodos são propostos para a busca da matriz inversa de A (HYVÄRINEN et al., 2001).
O método a ser utilizado neste trabalho usa dados estatísticos de segunda ordem, e ele é chamado
SOBI - Second Order Blind Identification (BELOUCHRANI et al, 1997) - com Ortogonalização
Robusta (BELOUCHRANI & CICHOCKI, 2000).
3.3.1. Preprocessamento (Branqueamento dos Dados)
O procedimento de busca da matriz inversa será simplificado se os sinais s(t) forem estimados
através de uma mistura z dada por:
z = V.y
(22)
onde V representa uma matriz de branqueamento
z representa os dados branqueados
y representa os sinais x sem a componente de ruído n
Dize-se que um vetor com media zero z é dito branco se os seus elementos são
descorrelacionados e ele possui variância unitária (HYVÄRINEN et al., 2001).
Sendo B a matriz em que as colunas representam auto-vetores de norma unitária da matriz de
covariância RY(0) e D = diag(λ1,..., λn) a matriz diagonal dos autovalores. A matriz de
branqueamento V pode ser computada através do método da decomposição em valores singulares
- SVD (HYVÄRINEN et al., 2001) como:
V = D -1/2 B T
(23)
50
onde V sempre existe quando os autovalores λi são positivos, o que na prática não é uma
restrição, já que para dados reais, Ry(0) é semi-definida positiva e assim os autovalores serão
positivos ( HYVÄRINEN et al., 2001).
Podemos expressar a matriz de covariância Ry(0) em função das matrizes de auto-valores D e
auto-vetores B:
R y ( 0 ) = E[y(t).y * (t)] = BDB T
(24)
Onde, ao expandirmos Rz(0) em temos de Ry(0) e V obtemos:
(25)
R Z ( 0 ) = E [ z ( t ) z * ( t )] = E [ Vy ( t ) y * ( t ) V H ] =
V E [ y ( t ) y * ( t )] V H = D − 1 / 2 B T BDB
T
D
−1 / 2 T
=I
Assim, vemos que z(t) representa realmente um conjunto de dados descorrelacionados entre si e
com variância unitária. O processo z(t), pode ainda ser reescrito, agora em função de x(t) e V
como sendo:
z(t) = V.x(t) = V [A.s(t) + n(t)] = U.s(t) + V.n (t)
(26)
onde U = VA, e U.s(t) é uma mistura unitária das fontes s(t).
Toda a informação contida na covariância é exaurida após o branqueamento, no sentido de que
mudanças em U para qualquer outra matriz unitária não alteram a covariância de z(t)
(BELOUCHRANI et al., 1997).
51
A busca da matriz A se reduz à busca de uma matriz unitária U. Ou seja, ela se reduzirá em
estimar a transformação ortogonal que produz os dados branqueados z(t); o que torna mais fácil o
processo de busca.
Branqueamento com Robusta Ortogonalização
Em 2000, foi proposto por BELOUCHRANI e colaboradores, um método chamado
Branqueamento Robusto. O processo é descrito no apêndice A e é utilizado neste trabalho como
alternativa ao processo de branqueamento descrito anteriormente, com o objetivo melhorar a
estimativa das componentes independentes pelo método SOBI. Nele, ao invés de tomarmos
somente a matriz de autocovariância da mistura para criarmos a matriz de branqueamento,
utilizamos um conjunto de matrizes de covariâncias das misturas, para podermos estimar a matriz
de branqueamento V. A partir de então, estimar as matrizes de dados branqueados
ˆ ( τ ) = VR
ˆ ( τ )V T para τ=1,...,K , que será utilizada no processamento SOBI.
R
Z
X
3.3.2 Algoritmo para o Processamento SOBI
Consideremos s(t)=[s1(t) s2(t) ... sn(t)]T um conjunto de fontes independentes. Assumindo a
hipótese H1 de que ele seja determinístico e ergódigo em que:
T
def
lim T −1 ∑ s( t + τ )s( t )* = E [ s( t + τ )s( t )*] = diag [ ρ 1 ( τ ),..., ρ n ( τ )]
T →∞
(27)
t −1
Ou a hipótese H2 de que seja um processo estacionário multivariado em que:
E [ s( t + τ ).s( t )∗ ] = diag [ ρ 1 ( τ ),..., ρ n ( τ )]
(28)
Onde: E representa a esperança matemática
ρ i ( τ ),( 1 ≤ i ≤ n ) é a autocovariância de s (t) em um determinado
i
deslocamento τ
52
Podemos dizer que tanto em H1 como em H2 a matriz de covariância de s(t), RS(τ), é dada por :
E[ s(t + τ ).s(t)* ] = R S ( τ )
(29)
No caso de si(t) serem descorrelacionadas, o resultado será a matriz onde a diagonal representa as
variâncias de todos os si(t), como escrito no segundo termo da equação 30.
Considerando o ruído n(t) como sendo: branco, estacionário e com média zero, podemos
expressar a sua covariância como sendo:
E [ n(t + τ ).n(t)* ] = diag[ σ 1 (τ ) ,..., σ n2 ( τ )] = σ 2δ ( τ ).I
2
(30)
onde σ2 é a variância do ruído, δ é o delta de Kronecker e I é a matriz identidade.
Considerando que o número de sensores, xi(t), é igual ao número de fontes independentes, si(t), a
autocovariância de x(t) para τ=0, pode ser expressa por:
R x ( 0 ) = E[ x(t) .x * ( t )] = A.R S ( 0 ).A H + σ 2 .I
(31)
e para τ diferente de zero:
R x(τ ) = E[ x(t + τ). x* ( t )] = A.R S ( τ ).A H
(32)
onde o termo H na matriz A significa o complexo conjugado transposto de A e o termo relativo
ao ruído branco desaparece.
53
A fim de facilitar a busca de s(t), podemos, sem perda de generalidade, considerar que eles têm
variância unitária e assim a faixa dinâmica das fontes estaria relacionada com a magnitude da
correspondente coluna de A (BELOUCHRANI et al, 1997).
Considerando as fontes descorrelacionadas e com variância unitária, e definindo y(t) como sendo
os sinais em x(t) onde foram subtraídas as componentes de ruído n(t), pode-se reescrever a
autocovariância de s(t) com τ=0 como sendo:
Rs (0 ) = I
e assim a autocovariância de y(t) será:
R y ( 0 ) = E[y(t).y * (t) ] = A.I.A H = A.A H
(33)
Considerando os dados já previamente branqueados:
z( t ) = V.y( t ) ,
onde V é a matriz de branqueamento, a esperança matemática de z(t) será:
E [ z ( t ) z * ( t )] = E [ Vy ( t ) y * ( t ) V H ] = VAA
H
VH = I
(34)
A equação (34) mostra que se V é uma matriz de branqueamento, então VA é uma matriz
unitária. Assim, para qualquer matriz de branqueamento V existe uma matriz unitária U tal que
VA=U. Conseqüentemente a matriz A pode ser calculada como:
A = V# U
Onde # significa a matriz pseudo-inversa de Moore-Penrose.
Assim, o processo se reduz a encontrar a matriz unitária U. do modelo linear dos dados
branqueados:
def
z( t ) = Vx( t ) = V [ As( t ) + n( t )] = Us( t ) + Vn( t )
(35)
54
Matrizes Essencialmente Iguais (BELOUCHRANI et al., 1997)
Duas matrizes Q e U são ditas essencialmente iguais se existe P, tal que Q = U.P, onde P possui
uma entrada não-zero em cada coluna e linha e essas entradas possuem módulo unitário. E assim
escrevemos:
Q =& U
(36)
Nesse contexto, procuramos uma matriz essencialmente igual a U, a fim de determinar s(t). O
problema é escolher um determinado lag τ para que seja possível estimar Q através de um
processo de diagonalização conjunta. A diagonalização de Rz(τ) para um determinado τ produz
parâmetros relevantes se Rz(τ) tiver autovalores distintos, então será possível estimar Q.
Ao obter Q e considerá-lo como sendo um valor estimado Û de U, pode-se finalmente estimar as
componentes independentes s(t):
ˆ H .V
ˆ .x( t )
ˆs( t ) = U
(37)
Diagonalização Conjunta
O operador off de uma determinada matriz M é definido como sendo:
off ( Μ ) = ∑1≤i ≠ j ≤ n | M ij |2
(38)
Uma diagonalização unitária da matriz M é equivalente a zerar o off ( Q H .M.Q ) através de uma
matriz unitária Q. Se uma matriz M pode ser escrita na forma M = U.D.U H , sendo U unitário e
55
D diagonal, pode ser unitariamente diagonalizada somente por matrizes unitárias que sejam
essencialmente iguais a U, ou seja, se off ( Q H .M.Q ) = 0 , então Q =& U .
Função Custo
Considerando um conjunto de K matrizes de covariâncias M= {M1,...,Mk} , a função custo pode
ser definida para qualquer matriz unitária Q, como sendo:
K
C ( M ,Q ) = ∑ off ( Q H M k Q )
k =1
(39)
Assim, uma matriz é dita diagonalizadora de um conjunto M de matrizes se ela minimiza o
critério C(M,Q) sobre todo o conjunto de matrizes unitárias Q.
56
Síntese do Algoritmo SOBI
O algoritmo SOBI é sintetizado a seguir:
●
Estima-se a covariância Rx(0). Denotando como sendo λ1,...,λn os n maiores auto-valores e
h1,...,hn, os correspondentes auto-vetores de Rx(0);
●
Obtendo-se a estimativa da matriz de branqueamento V com Ortogonalização Robusta
(Apêndice A):
●
ˆ ( τ ) através do cálculo das matrizes de covariância de
Constrói-se uma estimativa de R
Z
z(t) para um número fixo de lags r ∈ { τ j | j = 1,..., K }.
●
Obtém-se a matriz
Û como sendo a matriz de diagonalização conjunta de
ˆ ( τ ) | j = 1,..., K }.
{R
Z
j
●
ˆ HV
ˆ x( t ) , e a matriz de mistura A
Os sinais originais são estimados como sendo ˆs( t ) = U
como sendo:
ˆ =V
ˆ #U
ˆ
A
(40).
Dentre os sinais originais, que seriam as componentes independentes, são removidos aqueles que
não contribuiriam com o PE, Os coeficientes da matriz A correspondentes àquelas componentes
retiradas, são substituídos por zeros e assim, na reconstrução da mistura x(t) eles não são
considerados.
Este algoritmo foi desenvolvido por BELOUCHRANI e colaboradores do laboratório Riken do
Japão (ICALAB, 2004) que criaram o ToolBox ICALAB em ambiente MATLAB.
57
Capítulo 4: Materiais e Métodos
Este capítulo descreve o método empregado para obter os sinais simulados a partir de dados
subrogados e o processo envolvido para obter o PE a partir destes dados com CSTD. Também é
descrito o procedimento para a obtenção dos sinais de EEG coletados para estímulos com
corrente senoidal de 5 Hz e 2 kHz. Como esses sinais foram processados e finalmente os
métodos, utilizando CSTD e SOBI-RO, adotados para a obtenção do PE e da medida das
latências das suas componentes.
4.1 Remoção de Ruído em Sinais de EEG Simulados
Para avaliar o método da remoção de ruído com Wavelet na estimação do potencial evocado
(PE), foram simulados sinais de EEG. Esses sinais foram gerados a partir dos seguintes critérios.
Um PE modelo foi gerado com base das latências e amplitudes encontradas no PE (3 picos e 3
vales) de um dos voluntários durante estimulação somato-sensitiva com senoide de 2kHz (Figura
33a). O PE foi filtrado com passa - baixas de 40 Hz. Nesse sinal, no período entre -0,6s e 0s
(onde 0s é o início da estimulação) a amplitude foi zerada e no período entre 0 e 0,6s encontra-se
o PE modelo. Em seguida, foi escolhido um trecho de 1,2s de EEG espontâneo do mesmo
voluntário (Figura 33b). A freqüência de amostragem dos sinais é 1 kHz.
EEG coletado
ERP modelo simulada
10
4
8
3
6
4
2
uV
(uV)
2
1
0
-2
0
-4
-6
-1
-8
-2
-0.4
-0.2
0
(s)
0.2
0.4
0.6
-10
-0.4
-0.2
0
(s)
0.2
0.4
0.6
Figura 33: (a) Modelo de PE ideal. (b) Trecho de EEG espontâneo
58
A partir do trecho de EEG espontâneo, foram gerados outros 128 trechos de EEG com dados
subrogados conforme sugestão dada por SCHREIBER & SCHMITZ, A. (2000), para trabalhar
com modelos envolvendo fontes de EEG:
Primeiramente faz-se a transformada de Fourier do sinal de EEG espontâneo e obtém-se a
resposta em freqüência Sk:
| Sk | =
2
i 2πkn
s n exp
∑
N n =0
N
1
N −1
2
(41)
Em seguida, procede a transformada inversa de Fourier adicionando o termo eiak que altera a fase
do sinal no domínio do tempo:
sn =
1
N −1
eα
∑
N
k =0
i k
i 2πkn
S k exp −
N
(42)
Onde 0 ≤ α k < 2π é uma variável aleatória uniformemente distribuída.
K é o índice das amostras no domínio da freqüência
n é o índice das amostras no domínio do tempo
sn é o sinal no domínio do tempo
Sk é o sinal no domínio da freqüência
N é o número de amostras do sinal sn
As características estatísticas dos sinais serão similares nos trechos subrogados, em vista que se
mudou unicamente a fase, de forma aleatória. Na Figura 34, estão representados os trechos de
EEG espontâneo coletado e o trecho de EEG com dados subrogados criados a partir do trecho de
EEG espontâneo. Os histogramas mostraram-se similares (Figura 35) bem como as densidades
espectrais de potência (Figura 36).
59
EEG surrogado
10
8
8
6
6
4
4
2
2
0
uV
uV
EEG coletado
10
0
-2
-2
-4
-4
-6
-6
-8
-8
-10
-10
-0.4
-0.2
0
(s)
0.2
0.4
0.6
-0.4
-0.2
0
(s)
(a)
0.2
0.4
0.6
(b)
Figura 34: Trechos de (a) EEG espontâneo coletado (b) EEG subrogado
Histograma do EEG coletado
50
40
Numero de Ocorrencias
40
30
20
10
30
20
10
0
-8
-4
0
4
8
0
-8
-4
Valores de Amplitude
0
4
8
Valores de Amplitude
(a)
(b)
Figura 35: Histogramas de (a) EEG coletado e (b) EEG subrogados
PSD Estimate via Welch for colected EEG
0
Power/frequency (dB/Hz)
-10
-20
-30
-40
-50
PSD Estimate via Welch for surrogate EEG
0
-10
Power/frequency (dB/Hz)
Numero de Ocorrencias
Histograma do EEG surrogado
50
-20
-30
-40
0
0.1
0.2
0.3
Frequency (kHz)
(a)
0.4
-50
0
0.1
0.2
0.3
0.4
Frequency (kHz)
(b)
Figura 36: Densidade Espectral de Potência de dois trechos (a,b) de EEG subrogados
60
O EEG durante estimulação foi simulado com a soma do EEG espontâneo gerado com dados
subrogados e o modelo do PE,
EEG estimulação = PE modelo + EEG espontâneo subrogado.
Foram criados 3 grupos de dados, sendo o primeiro com RSR de -19dB, o segundo com -31dB e
o terceiro com -43dB. Cada grupo contém 10 conjuntos de 128 trechos de EEG durante
estimulação.
O PE foi estimado com a média coerente e o algoritmo CSTD para remoção de ruídos. Mediramse então os picos (valor máximo) e vales (valor mínimo) das componentes do PE e as suas
respectivas latências, comparando-as com as amplitudes e latências do PE modelo. Obteve-se a
média e o desvio padrão das latências e das amplitudes para os 10 conjuntos de 128 trechos para
cada RSR.
4.2 Sinais EEG Durante Estimulação de 2 kHz
Foram coletados sinais de EEG de três voluntários normais (#1, #2 e #3), sem doença neurológica
conhecida e sem uso de medicação. O protocolo experimental foi realizado no laboratório de
Neurofisiologia Clínica da UNIFESP e aprovado pelo Comitê de Ética local. Os eletrodos de
estimulação (de ouro com 10 mm de diâmetro) foram posicionados nas faces medial e lateral da
falange distal, ao lado do leito ungueal, do dedo indicador da mão esquerda. O estímulo de
corrente senoidal de 2 kHz e intensidade igual a 2 vezes o limiar de sensibilidade foi gerado pelo
sistema Neurometer Current Perception Threshold (CPT)-USA. As derivações para a coleta do
EEG foram Cz e Fpz com referência em A1+A2 (orelhas interligadas). Também, registrou-se o
sinal no punho esquerdo (Pi) que foi utilizado como sinal de sincronismo da estimulação. Foram
realizadas 6 sessões com 100 estímulos cada. O estímulo teve duração de 0,6s, seguido de um
período de 1,6s sem estimulação (trecho). Os sinais foram coletados a uma taxa de amostragem
de 20 kHz pelo sistema NeuroScan SymAmpsTM – USA.
61
Os sinais, em off line, foram sincronizados com o início dos estímulos. Em seguida, foram
reamostrados a 1 kHz. Tendo em vista que a banda de resposta no córtex de interesse neste
experimento vai até 100 Hz, os sinais foram filtrados direta e inversamente (fase zero) com um
passa baixas Butterworth de segunda ordem e freqüência de corte de 200 Hz.
Para cada um dos voluntários obteve-se o PE de cada sessão (100 estímulos) com a media
coerente e o algoritmo CSTD, totalizando seis PEs por voluntário. Posteriormente, obteve-se um
PE para cada voluntário, utilizando os 600 estímulos (6 sessões). Visualmente foram
identificadas as componentes dos PEs, sendo medidas as amplitudes e as latências para cada um
dos três PEs. Finalmente, realizou-se o grand-average dos PEs dos 3 voluntários e identificandose as latências e amplitudes.
4.3 Sinais EEG Durante Estimulação de 5 Hz.
Foram coletados sinais de EEG de 5 voluntários (sendo o #1 e o #2 do experimento anterior) com
estímulo de corrente senoidal de 5 Hz e intensidade igual a 2 vezes o limiar de sensibilidade. As
derivações foram Cz, Oz, T3, T4, C3, C4, C5, C6, CP3 e CP4. Também, foi coletado o sinal Pi.
Cem estímulos de 20 s foram aplicados intercalando períodos de 10 s sem estimulação. Os sinais
foram coletados com uma freqüência de amostragem de 500 Hz.
Os sinais, em off line, neste caso, foram filtrados com um passa-baixas Chebyshev de ordem 8 e
freqüência de corte de 62,5 Hz. Devido à dificuldade de remover o artefato ao estímulo (senoide
de 5 Hz), sem remover informação do PE, mediante a filtragem convencional, foi necessária a
análise em componentes independentes (ICA). Neste trabalho, escolheu-se para análise o canal
Cz, onde se esperava que houvesse uma boa estimativa do PE. Os sinais foram processados com
o algoritmo SOBI-RO para extrairmos a componente independente de 5 Hz associado ao artefato
devido à estimulação elétrica. Após remover o sinal de 5 Hz obteve-se o PE (100 estímulos) com
a media coerente e o algoritmo CSTD.
62
O PE assim obtido mostrou uma grande contaminação com a banda de freqüência entre 8 e
12 Hz, também presente antes da estimulação. Devido à grande dificuldade de observar as curtas
latências do PE, optou-se também por remover as componentes independentes relacionadas com
esta banda de freqüência. A remoção foi realizada comparando-se visualmente (qualitativa) a
amplitude das oscilações antes e durante estimulação. Tirou-se a média coerente dos trechos do
canal Cz. Suspeitou-se que para alguns casos, havia uma diminuição de amplitude no intervalo de
interesse do PE, comparando-o com o PE obtido antes do processamento. Para assegurar que a
escolha destas componentes independentes influenciasse minimamente na determinação das
curtas latências do PE, foi realizado o seguinte procedimento:
• Seleção de 100 trechos de EEG de um voluntário
• Escolha aleatória de 64 dos 100 trechos de dados para a aplicação de SOBI-RO.
Processo repetido nove vezes, formando 10 conjuntos com 64 trechos cada.
• Aplicação do processo de remoção das componentes independentes por inspeção
visual com o compromisso de remover somente aquelas que aparentemente
acarretasse ruído, inclusive na banda entre 8 e 10 Hz.
• Aplicação da média coerente e da remoção de ruídos com a árvore de permuta
cíclica utilizando Wavelet (CSTD) para cada conjunto de 64 trechos.
63
Capítulo 5: Resultados
Neste capítulo estão os resultados obtidos com a aplicação de CSTD em sinais de EEG simulados
bem como os valores de latências das componentes do PE encontrado. Em seguida serão
apresentados os PEs estimados para estimulação senoidal de 2 kHz com a média coerente e com
CSTD. Serão apresentados os valores das latências das componentes deste PE para os
voluntários, assim como as latências médias com os respectivos desvios padrões. Para a
estimulação de 5 Hz, serão apresentados os resultados obtidos com o SOBI-RO para a remoção
de artefatos ao estímulo e freqüências na banda de 8 - 10 Hz. Em seguida, os PEs estimados com
a média coerente e com CSTD (após SOBI-RO). As latências médias das componentes
identificadas dos PÉS para os voluntários serão apresentadas com os seus respectivos desvios
padrões
5.1 Testes Para EEG Simulado
A Figura 37a mostra o modelo do PE, onde o instante zero representa o início da estimulação. A
morfologia deste PE apresenta 3 vales e 3 picos com suas respectivas latências e amplitudes
mostradas nas Tabela 3 e Tabela 4. Nos gráficos b, c e d da Figura 37, observa-se a presença de
ruído com -19dB, -31dB e -43dB, respectivamente. Na Figura 37c percebe-se a influência do
ruído (EEG espontâneo) no PE obtido com a média coerente de 128 trechos, com RSR de -31 dB.
Os componentes deste PE mostraram, em média, amplitudes (Tabela 3) e latências (Tabela 4)
diferentes aos do modelo. Essa diferença é maior nas curtas latências (como indicado pela maior
variabilidade das medidas) onde as amplitudes do PE modelo têm menor RSR.
64
PE Modelo
4
uV
2
(a)
0
-2
-0.4
-0.2
0
0.2
0.4
0.6
PE com SNR=-19db
4
uV
2
(b)
0
-2
-0.4
-0.2
0
0.2
0.4
0.6
PE com SNR=-31db
4
uV
2
(c)
0
-2
-0.4
-0.2
0
0.2
0.4
0.6
PE com SNR=-43db
4
uV
2
(d)
0
-2
-0.4
-0.2
0
(s)
0.2
0.4
0.6
Figura 37: (a) Modelo do PE, e média coerente de 128 trechos com (b) RSR=-19dB, (c) RSR=-31dB e (d)
RSR=-43dB.
65
EEG Simulado para SNR=-19dB
4
(uV)
2
(a)
0
-2
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
EEG Simulado para SNR=-31dB
4
(uV)
2
(b)
0
-2
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
EEG Simulado para SNR=-43dB
4
(uV)
2
(c)
0
-2
-0.5
-0.4
-0.3
-0.2
-0.1
0
(s)
0.1
0.2
0.3
0.4
0.5
Figura 38: Média coerente de 10 conjuntos de 128 trechos após CSTD para RSR de: (a) -19 dB, (b)-31dB e (c)
-43dB.
A Figura 38a representa a média dos 10 PEs com RSR de -19 dB e CSTD. As latências são vistas
com clareza, os seus valores médios estão próximos aos do PE modelo (Tabela 3), com erro
relativo máximo de 8%, sendo que as curtas latências (N23 e P54) apresentam maior
variabilidade. Por outro lado, as amplitudes médias apresentam erro de até 177% (Tabela 4). Este
comportamento se repete para -31 dB (Figura 38b) e -43 dB (Figura 38c). Para sinais com RSR
de -43 dB as componentes N23 e P54 tiveram as maiores variabilidades nas medidas, tanto para
as latências quanto para as amplitudes (Tabela 3 e Tabela 4).
A título de comparação do desempenho das técnicas do CSTD e media coerente para estimar o
PE, a RSR de -31 dB foi escolhida (Tabela 3 e Tabela 4). A estimativa das latências, para ambas
66
as técnicas, foram similares nos valores médios, no entanto, o CSTD mostra menor variabilidade
(menor desvio padrão) para todas as componentes do PE. Também, o CSTD mostra melhor
estimativa das amplitudes, principalmente nas curtas latências (menor RSR).
1º pico(ms)
1º vale(ms)
2º pico(ms)
2º vale(ms)
3º pico(ms)
3º vale
N23
P54,1
N99,0
P163,0
N265,0
P412,0
-19dB (CSTD)
24,9±7,9
52,0±5,2
97,6±1,5
161,0±2,8
267,4±3,9
411,1±4,4
-31dB (CSTD)
26,6±6,7
52,8±7,7
97,7±2,3
158,9±5,1
274,3±10,7
411,3±5,5
-43dB (CSTD)
31,2±11,7
56,7±8,8
97,9±2,6
157,0±6,3
271,2±21,22
418,3±22,4
-31dB:- média
coerente
27,1±12,8
54,1±7,9
97,2±3,4
156,5±6,9
268,6±16,4
411,1±9,5
PE modelo
Tabela 3: Estatística das latências dos 10 PEs (128 trechos) com diferentes RSR
1º pico (uV)
1º vale (uV)
2º pico (uV)
2º vale (uV)
3º pico (uV)
3º Vale (uV)
PE modelo
0,221
-0,013
1,390
-1,360
3,327
-1,905
-19dB (CSTD)
0,25±0,11
0,01±0,21
1,50±0,12
-1,45±0,19
3,09±0,12
-1,89±0,13
-31dB (CSTD)
0,25±0,27
0,022±0,44
1,57±0,24
-1,55±0,41
3,39±0,26
-1,83±0,27
-43dB (CSTD)
0,46±0,63
0,06±0,93
1,73±0,47
-1,78±0,86
3,54±0,54
-1,90±0,42
-31dB (média
-0,61±0,40
2,44±0,30
-2,25±0,45
3,89±0,16
-2,55±0,37
1,01±0,37
coerente)
Tabela 4: Estatística das amplitudes dos 10 PEs (128 trechos) com diferentes RSR.
67
5.2 Resultados Para Estímulo Elétrico Senoidal de 2 kHz
A média coerente para as seis sessões de 100 trechos, durante estimulação de 2 kHz, do
voluntário #1 é apresentada na Figura 39a. Os seis PEs estimados com os 100 estímulos
apresentam uma baixa RSR. Entretanto, na Figura 39b, com o método CSTD observa-se uma
melhora substancial na RSR do PE. Aumentando-se o número de trechos para 600 (das seis
sessões), o PE, como esperado, melhora a sua RSR (Figura 40a), sendo, também, esta melhora
maior para o método CSTD (Figura 40b).
6
5
4
Amplitude(uV)
3
2
1
0
-1
-2
-3
-4
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Tempo(s)
(a)
6
5
4
Amplitude(uV)
3
2
1
0
-1
-2
-3
-4
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Tempo(s)
(b)
Figura 39: PE com 6 conjuntos de 100 trechos para o voluntário #1 (a) média coerente, (b) CSTD.
68
4
3
3
2
2
Amplitude(uV)
Amplitude(uV)
4
1
1
0
0
-1
-1
-2
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
-2
-0.2
0.6
-0.1
0
Tempo(s)
0.1
0.2
0.3
0.4
0.5
0.6
Tempo(s)
(a)
(b)
Figura 40: PE com 600 trechos do sinal de EEG do voluntário #1 (a) média coerente, (b) CSTD.
A morfologia do PE do voluntário #1 (Figura 40b) apresenta com clareza as componentes nas
latências: 40 ms (P40), 82 ms (N82), 145 ms (P145) e 239 ms (N239). Os PEs de outros dois
voluntários apresentaram morfologia similar, sendo as médias destas componentes, para os três
voluntários, P31, N82, P129, N224, P389, respectivamente (Tabela 5).
Na média geral dos PEs (grand-average) dos 3 voluntários, após a aplicação do método CSTD
(Figura 41), são detectadas as latências P36, N86, P135, N221 e P383 (Tabela 5).
2
1.5
Amplitude(uV)
1
0.5
0
-0.5
-1
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Tempo(s)
Figura 41: Média geral dos PEs (grand-Average) dos 3 voluntários após método CSTD
69
Voluntário
P1(ms)
N1(ms)
P2(ms)
N2(ms)
P3(ms)
#1
40
82
145
239
391
#2
22
75
108
213
379
#3
32
90
134
220
397
media
31
82
129
224
389
9
8
19
13
9
Desvio
padrão
Latências da media geral (grand-average) dos PEs
36
85
135
221
383
Tabela 5: Latências das componentes do PE após estímulo de 2kHz.
5.3 Resultados Para Estímulo Elétrico Senoidal de 5Hz
A Figura 42 apresenta a media coerente para o canal Cz, do voluntário #1, com 100 estímulos de
5 Hz. A grande influência do artefato ao estímulo elétrico não permite identificar as componentes
do PE (Figura 42a).
Após remoção deste artefato com a técnica SOBI-RO já é possível
identificar algumas componentes do PE (Figura 42b). Porém, o PE mostra intensa energia
presente na banda de 8 a 10 Hz, antes e durante a estimulação. Ela dificulta ainda a identificação
clara das suas componentes.
Cz antes da remoção de 5Hz com SOBI
Am
plitude(uV)
4
2
(a)
0
-2
-4
-2
-1
0
1
2
3
4
5
6
Cz após remoção de 5Hz com SOBI
Am
plitude(uV)
4
2
(b)
0
-2
-2
-1
0
1
2
tempo(s)
3
4
5
6
Figura 42: Média coerente do canal Cz (a) antes e (b) após a remoção do artefato ao estímulo de 5Hz com
SOBI-RO
70
A
m
p
litu
d
e
(u
V
)
A
m
p
litu
d
e
(u
V
)
A
m
p
litu
d
e
(u
V
)
Tres componentes Independentes na banda de 8,5Hz
0.5
(a)
0
-0.5
-2
-1
0
1
2
3
4
5
6
0.5
(b)
0
-0.5
-2
-1
0
1
2
3
4
5
6
0.5
(c)
0
-0.5
-2
-1
0
1
2
tempo(s)
3
4
5
6
Figura 43: Componentes independentes na banda de 8-10Hz identificadas e removidas através de SOBI-RO
A Figura 43 exemplifica três das várias componentes independentes obtidas após SOBI-RO, na
banda de 8-10 Hz, que foram consideradas (avaliação visual) como tendo comportamento similar
antes e após a estimulação. No PE após a remoção de todas essas componentes é possível
identificar picos e vales nas latências P190, N230 P285 e N490 (Figura 44b). As densidades
espectrais de potência do PE ante e após SOBI-RO (calculada com o periodograma de Welch
com janela de Hanning de 512 pontos e overlapping de 50%) mostram a atenuação dos 5 Hz (e
harmônicos) e a banda de 8-10 Hz (Figura 44).
Media Cz antes de SOBI
A
m
p
litu
d
e
(u
V
)
2
1
(a)
0
-1
-2
-2
-1
0
1
2
3
tempo(s)
Media Cz apos SOBI
4
5
6
A
m
p
litu
d
e
(u
V
)
2
1
(b)
0
-1
-2
-2
-1
0
1
2
tempo(s)
3
4
5
6
Figura 44: PE (a) antes e (b) após remoção da banda de 8-10Hz
71
Power Spectral Density Estimate via Welch after SOBI
20
Power Spectral Density Estimate via Welch before SOBI
20
15
15
10
Power/frequency (dB/Hz)
Power/frequency (dB/Hz)
10
5
0
0
-5
-5
-10
-10
-15
5
-15
0
0.01
0.02
0.03
Frequency (kHz)
0.04
0.05
0.06
0
0.01
0.02
0.03
Frequency (kHz)
0.04
0.05
0.06
(a)
(b)
Figura 45: Espectro de potência do PE (a) antes e (b) após a aplicação de SOBI-RO
A Figura 46 mostra o PE obtido com a média coerente após processamento com o SOBI-RO para
cada um dos 10 conjuntos de 64 trechos (escolhidos aleatoriamente dos 100 trechos) para o
voluntário #1. Percebe-se um comportamento padrão da morfologia do PE, principalmente nas
componentes identificadas anteriormente. Essas componentes são também identificadas no PE
obtido com o CSTD após SOBI-RO (Figura 47), porém com uma melhor relação sinal-ruído. A
média e o desvio padrão dos 10 conjuntos de trechos (Figura 48) indicam que não se alterou
substancialmente a morfologia do PE.
Médias dos conjuntos de Trechos após SOBI-RO - Voluntário #1
3
2.5
2
(uV
)
1.5
1
0.5
0
-0.5
-1
-0.5
0
0.5
1
(s)
Figura 46: PEs com média coerente de cada um dos 10 conjuntos de trechos após SOBI (Voluntário #1)
72
Média dos trechos após SOBI e CSTD para voluntario#1
3
2.5
2
uV
1.5
1
0.5
0
-0.5
-1
-0.5
0
0.5
1
s
Figura 47: PEs de cada um dos 10 conjuntos de trechos após SOBI-RO e CSTD-Voluntário #1
Media dos 10 conjuntos de dados para Voluntário #1
2.5
2
(uV)
1.5
1
0.5
0
-0.5
-1
-0.5
0
0.5
1
(s)
Figura 48: Media e desvio padrão dos dez PÉS após SOBI-RO e CSTD - Voluntário #1
As figuras 46 e 47 resumem os resultados obtidos para o voluntário #1. Na morfologia do PE
após SOBI-RO e CSTD foi possível detectar mais claramente as latências P188, N234, P268 e
N441. Latências menores não foram possíveis de serem identificadas (Tabela 6). Observa-se na
Figura 50, que a aplicação da remoção de ruídos com CSTD removeu oscilações de freqüências
mais altas, mas manteve a amplitude das componentes praticamente inalteradas (baixa
freqüência), desta forma obteve-se um PE com melhor RSR.
73
Media dos trechos em Cz para o Voluntário #1
2.5
2
(uV)
1.5
1
0.5
0
-0.5
-1
-1
-0.5
0
0.5
(s)
1
1.5
2
Figura 49: PE obtido com a média coerente do sinal original (sessão de 100 trechos) - Voluntário #1.
Média dos trechos após SOBI e CSTD para voluntario#1
2.5
SOBI-Media Coerente
SOBI-CSTD
2
(uV)
1.5
1
0.5
0
-0.5
-1
-0.5
0
0.5
(s)
1
1.5
2
Figura 50: PE médio dos 10 conjuntos de 64 trechos obtido após SOBI-RO e média coerente, e SOBI-RO e
CSTD, para o voluntário #1.
Para o voluntário #2, na média coerente do sinal original já se percebe o PE (Figura 51) com
latências em torno de N100, P210 e N430. Após a aplicação do SOBI-RO e CSTD (Figura 52)
podem-se identificar com clareza as componentes com latências: N104, P206 e N424 (Tabela 6).
Também, observa-se uma diminuição de energia em componentes de freqüências mais altas.
74
Media dos trechos em Cz para o Voluntário #2
2
1.5
(uV)
1
0.5
0
-0.5
-1
-1
-0.5
0
0.5
(s)
1
1.5
2
Figura 51: PE obtido com a média coerente do sinal original (sessão de 100 trechos) - Voluntário #2
média dos trechos após SOBI e CSTD para voluntario#2
2
SOBI-Media Coerente
SOBI-CSTD
1.5
(uV)
1
0.5
0
-0.5
-1
-1
-0.5
0
0.5
(s)
1
1.5
2
Figura 52: PE médio dos 10 conjuntos de 64 trechos obtido após SOBI-RO e média coerente, e SOBI-RO e
CSTD, para o voluntário #2.
Os resultados a seguir se referem ao voluntário #3. Na Figura 53 observa-se um nível de ruído
muito grande dificultando a visualização das componentes do PE obtido com a media coerente do
sinal. A única componente que pode ser identificada claramente está aproximadamente na
latência N550. Já no PE obtido após SOBI-RO e CSTD (Figura 54) foram identificadas com
clareza as seguintes componentes: P139 N237 P283 N562 (Tabela 6). Componentes com
latências menores não foi possível identificar.
75
Media dos trechos em Cz para o Voluntário #3
0.6
0.4
(uV)
0.2
0
-0.2
-0.4
-1
-0.5
0
0.5
(s)
1
1.5
2
Figura 53: PE obtido com a média coerente do sinal original (sessão de 100 trechos) - Voluntário #3
Media dos trechos após SOBI para o Voluntário #3
1
SOBI-Media Coerente
SOBI-CSTD
0.8
(uV)
0.6
0.4
0.2
0
-0.2
-0.4
-1
-0.5
0
0.5
(s)
1
1.5
2
Figura 54: PE médio dos 10 conjuntos de 64 trechos obtido após SOBI-RO e média coerente, e SOBI-RO e
CSTD, para o voluntário #3.
Para o voluntário #4, a Figura 55 representa a média coerente do sinal original, onde devido à
grande intensidade de ruído, só foi possível identificar a componente N440. É possível supor,
ainda que prematuramente, a existência de uma componente aproximadamente em P230. Após o
processamento SOBI-RO e CSTD (Figura 56), a relação sinal ruído melhorou e foi possível
identificar outras componentes: P181, N230, P290 e N434 (Tabela 6). Latências menores não
foram possíveis de serem identificadas.
76
Media dos trechos em Cz para o Voluntário #4
0.4
0.3
0.2
(uV)
0.1
0
-0.1
-0.2
-0.3
-0.4
-1
-0.5
0
0.5
(s)
1
1.5
2
Figura 55: PE obtido com a média coerente do sinal original (sessão de 100 trechos) - Voluntário #4
Media dos trechos para o voluntário #4 após SOBI
0.4
SOBI-Media Coerente
SOBI-CSTD
0.3
(uV)
0.2
0.1
0
-0.1
-0.2
-0.3
-1
-0.5
0
0.5
(s)
1
1.5
2
Figura 56: PE médio dos 10 conjuntos de 64 trechos obtido após SOBI-RO e média coerente, e SOBI-RO e
CSTD, para o voluntário #4.
Para o voluntário #5 não foi possível obter componentes com curtas latências. A relação sinal
ruído é muito pequena. Pode-se identificar somente uma componente em aproximadamente N604
(Figura 57). Percebe-se que não houve melhora significativa após a aplicação de SOBI-RO e
CSTD (Figura 58). O PE apresenta-se com melhor relação sinal ruído, mas, ainda não é possível
identificar as curtas latências (Tabela 6).
77
Media dos trechos em Cz para o Voluntário #5
0.8
(uV)
0.4
0
-0.4
-0.8
-1
-0.5
0
0.5
(s)
1
1.5
2
Figura 57 : PE obtido com a média coerente do sinal original (sessão de 100 trechos) - Voluntário #5
Media dos trechos após SOBI e CSTD para o Voluntário #5
SOBI-Media Coerente
SOBI-CSTD
0.6
(uV)
0.4
0.2
0
-0.2
-0.4
-1
-0.5
0
0.5
(s)
1
1.5
2
Figura 58: PE médio dos 10 conjuntos de 64 trechos obtido após SOBI-RO e média coerente, e SOBI-RO e
CSTD, para o voluntário #5.
A média coerente dos PEs dos 5 voluntários (grand-average) mostra componentes N2 (N230 ms)
e P3 (P279) muito próximas da média das latências dos PEs dos cinco voluntários (Tabela 6). O
baixo desvio padrão dessas latências também sugere a proximidade do grand-average com os PEs
dos voluntários nessas componentes dos PEs.
Outras componentes identificadas no grand-
average foram: N109, P200 e N441.
78
Voluntário
P1(ms)
N1(ms)
P2(ms)
N2(ms)
P3(ms)
N3(ms)
#1
-
-
188
234
268
441
#2
-
104
206
-
-
424
#3
-
-
139
237
283
562
#4
-
-
181
230
290
434
#5
-
-
-
-
-
604
media
-
104
179
234
280
493
-
-
28
4
11
84
279
441
Desvio
padrão
Latências da media geral (grand-average) dos PEs
109
200
230
Tabela 6: Médias das latências das componentes do PE após estímulo de 5 Hz
Grand Averages dos Voluntarios #1 ao #5
1
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-1
-0.5
0
0.5
1
1.5
2
Figura 59: Grand-average para os cinco voluntários após SOBI-RO e CSTD
79
Capítulo 6: Discussão
6.1 Dados Simulados
O método sugerido por Schreiber & Schmitz (2000) utilizando a transformada de Fourier direta e
inversa com aleatoriedade nas fases (dados subrogados), além de fácil e prático, permitiu
construir dados simulados que foram de grande auxilio na avaliação do desempenho das técnicas
de média coerente e de CSTD para estimação do PE. As latências médias das componentes do
PE estimadas com ambas as técnicas (Tabela 3, –31 dB) apresentaram valores próximos. Este
resultado era esperado tendo em vista que a latência média de cada componente foi obtida de 10
PEs contaminados com ruído aleatório, assim, espera-se que o máximo (ou mínimo) da
componente também mude de latência aleatoriamente, mas em torno da latência da componente
do PE modelo. Por outro lado, o CSTD apresenta menor variabilidade (menor desvio padrão) na
estimativa da latência, o que indicaria um melhor desempenho. Este melhor desempenho foi
observado mais claramente na estimativa das amplitudes das componentes do PE (Tabela 4),
visto que, com CSTD, ruídos de altas freqüências foram removidos com eficiência aumentando a
RSR. CAUSEVIC et al. (2005) com simulações, assumindo um modelo com onda senoidal para
o PE e ruído branco para o EEG espontâneo, também demonstraram melhor desempenho do
CSDT em relação a media coerente na estimativa do PE. Há, no entanto, o interesse de melhorar
a estimativa do PE com o CSDT aprimorando o algoritmo para a determinação do limiar de
remoção de ruídos, como por exemplo, o método robusto proposto por Sardy et al. (2001).
6.2 Sinais EEG Durante Estímulo de 2 kHz e de 5 Hz
A metodologia empregada para a estimativa do PE durante estimulação de 2kHz, isto é,
eliminação do artefato ao estímulo com filtro passa-baixas de 1kHz e CSDT permitiu identificar
claramente várias componentes no PE. A componente na latência de 36ms, P36 (Tabela 5),
estaria compatível com a velocidade de propagação do potencial de ação das fibras de grosso
calibre (KANDEL, 1997). Este resultado também vai de encontro com o achado de que a
estimulação com corrente senoidal de 2 kHz evocaria percepções transmitidas por fibras de
grosso calibre (PIMENTEL et al., 2006). Provavelmente a componente P36 está relacionada com
80
as componentes P30 ou P40 encontradas em Desmedt & Tomberg (1989). O P40 (identificado
por alguns como P55) é seguido pelo N80, mas não se acredita que seja uma componente e sim
um retorno à linha de base (Desmedt & Tomberg 1989).
As componentes P36, N85, P135, N221 e P383 (Tabela 5) estiveram presentes na morfologia do
PE em todos os três voluntários. Este achado preliminar sugere que essas componentes podem
ser as principais do PE, na banda de freqüência até 200 Hz, durante estimulação senoidal de
2 kHz.
Para estimulação senoidal de 5 Hz observou-se que todos os cinco voluntários apresentaram
algum tipo de resposta evocada ao estímulo senoidal de 5 Hz. Por outro lado, todos apresentaram
artefato ao estímulo (inclusive nos harmônicos ímpares de 5 Hz) com grande intensidade, bem
como oscilações na banda de 8-10 Hz (presentes antes e durante a estimulação) que estão
possivelmente relacionadas ao ritmo alfa (KANDEL, 2000). A utilização da ferramenta SOBIRO removeu drasticamente o artefato ao estímulo de 5 Hz e freqüências na banda de 8 a 10 Hz,
permitindo uma melhor estimação do PE.
A técnica SOBI-RIO demanda um maior
processamento computacional (processo mais lento), entretanto, a filtragem convencional não
permitiria a remoção dessas freqüências sem perder informação dos PEs.
O método SOBI-RO para eliminar as componentes independentes indesejáveis, mereceu maior
atenção, visto que estas componentes foram identificadas visualmente. Visando avaliar esta
escolha qualitativa obteve-se 10 PEs a partir de 10 conjuntos de 64 trechos (selecionados
aleatoriamente do total de 100) para cada voluntário. Em todos os voluntários houve coerência
entre as componentes dos 10 PEs, sugerindo que a escolha das componentes independentes a
serem descartadas em cada um dos 10 conjuntos não alterou substancialmente a morfologia do
PE. De qualquer maneira, há um grande interesse em desenvolver métodos para a automação da
detecção das componentes a serem descartadas, observando o comportamento dos sinais de EEG
antes e durante a estimulação.
No PE com 5 Hz não foi possível observar componentes nas latências entre 0ms e 80ms. No
entanto, o voluntário #2 apresentou componente na latência em torno de 104ms (N104). Esse
81
achado vai de encontro com resultado de trabalho anterior (BRAGA et al., 2005) em que se
obteve N98±14, para este voluntário e em outro experimento, utilizando a ferramenta Fastica para
análise em componentes independentes. Por outro lado, componentes nas latências em torno de
179ms (P179), 234ms (N234), 280ms (P280) foram encontrados em pelo menos três voluntários,
além da componente em torno de N493 encontrada em todos os voluntários. Deve-se indicar que
a morfologia do PE para o voluntário #3 (Figura 54) sugere um pico na latência de 76 ms (N76),
porém a baixa RSR não permitiu afirmar que se trate de uma componente do PE. O mesmo
ocorre para a componente na latência P212 do PE do voluntário #5. A grand-average também
mostrou as componentes com as latências acima de 100ms (N109, P200, N230, P279, N441). No
entanto, não se pode afirmar a inexistência de outras componentes para estimulação de 5 Hz
abaixo de 90ms. Se elas tiverem uma RSR mais baixa, 100 estímulos poderiam não ser
suficientes para poder identificá-las.
Comparando as latências das componentes do PE para estimulação de 5 Hz àquelas encontradas
para estimulação senoidal de 2 kHz, percebe-se que para 2 kHz os valores das latências são
menores. Levando em conta as velocidades de propagação das fibras de diferentes calibres
(KANDEL et al. 2000), os resultados sugerem que estímulos senoidais de 5 Hz estariam
possivelmente associados à propagação em fibras finas, enquanto que os de 2 kHz estariam
associadas às fibras grossas. Este achado está em concordância com a avaliação psicofísica,
realizada por PIMENTEL e colaboradores (2006), também com estimulação senoidal de 5 Hz e
2 kHz.
Os resultados preliminares deste trabalho não puderem ser confrontados com a literatura
científica, porque, na literatura disponível do autor, não foi possível encontrar PE com
estimulação senoidal de 5 Hz e 2 kHz. Portanto, há a necessidade de se aprofundar no estudo da
potencial evocado por estimulação de corrente senoidal, razão pela qual, mais experimentos
utilizando maior número de estímulos e voluntários devem ser realizados.
O uso associado de SOBI-RO e CSTD com o objetivo de melhorar a RSR, como apresentado
nesse trabalho ainda não foi encontrado na literatura. Essas ferramentas para processamento de
sinais podem ser de grande auxílio em futuras pesquisas. Elas apresentaram resultados
82
satisfatórios no que diz respeito à melhora da relação sinal ruído do potencial evocado em sinais
de EEG durante estimulação somatossensorial com corrente senoidal de 5 Hz e 2 kHz. Este
método permitiu identificar com maior clareza as latências das componentes do potencial
evocado.
83
Capítulo 7: Conclusão
A aplicação da ferramenta CSTD com remoção de ruídos por meio de Wavelet mostrou melhor
desempenho que o método da média coerente, no que diz respeito à melhora da relação sinal
ruído do potencial evocado em sinais de EEG durante estimulação somatossensorial com corrente
senoidal de 5 Hz e 2 kHz. O uso de SOBI-RO como preprocessamento para CSTD foi de grande
importância para a remoção do artefato ao estímulo de 5 Hz, bem com a remoção de ruídos de
freqüências na banda 8-10 Hz que em princípio não estariam associados ao Potencial Evocado.
No entanto, há o interesse de aprimorar o método de detecção de componentes independentes a
serem removidas para melhorar a RSR com o compromisso de não alterar a morfologia do PE.
Os resultados sugerem menor latência das primeiras componentes do PE para estímulo de 2 kHz,
se comparados ao PE com estímulo de 5 Hz, para os voluntários utilizados neste estudo. Este
achado preliminar pode ser indício de que a morfologia do PE poderia discriminar a estimulação
da fibra grossa com 2 kHz e fibra fina com 5 Hz. Não obstante, maiores estudos devem ser
realizados para a confirmação da associação do tipo de fibra com a morfologia do PE a diferente
freqüência de estimulação senoidal.
Trabalhos Futuros
Faz-se necessário a realização de mais experimentos com estimulação senoidal, principalmente
com 5 Hz, a fim de buscar outras componentes do PE que podem estar localizadas inclusive em
latências menores que 80ms. Eles devem ser realizados com maior número de estímulos por
experimento e maior número de voluntários.
Outras freqüências de estimulação senoidal também poderiam ser investigadas. Inclusive outras
formas de onda poderiam ser empregadas, como por exemplo, a amplitude modulada. Devem ser
pesquisados métodos mais robustos para melhorar as estimativas dos limiares de remoção de
ruídos através de Wavelet utilizados no algoritmo CSTD. Além disso, devem-se realizar estudos
com outras funções Wavelet.
84
Buscar o desenvolvimento de um método quantitativo para a avaliação das componentes
independentes encontradas com SOBI-RO a serem descartadas através da análise do
comportamento das componentes antes e durante a estimulação. Também pesquisar outros
algoritmos ICA, como Fastica e Rúnica, dentre outras, para a busca de componentes
independentes.
85
Apêndice A - Branqueamento com Robusta Ortogonalização
O branqueamento dos dados é parte fundamental do processamento SOBI. Quanto mais robusto
ele for, melhores serão os resultados na busca das componentes independentes. Assim, foi
proposto por BELOUCHRANI et al (2000) um método chamado Branqueamento Robusto. Nele,
ao invés de tomarmos somente a matriz de autocovariância da mistura para criarmos a matriz de
branqueamento, utilizamos um conjunto de matrizes de covariâncias das misturas, para podermos
estimar a matriz de branqueamento.
Ou seja, ao invés de utilizarmos somente a equação seguinte:
R x( 0 ) = E[x(t).x* (t)]
(A.1)
Utilizamos também
R x(τ ) = E[ x(t). x*(t-τ )] = AR S(τ )A H
(A.2)
para τ=1,...,K
Este método pode ser descrito nos passos seguintes (BELOUCHRANI et al., 2000):
Estimam-se as matrizes de covariância da mistura x(t):
ˆ ( 1 ),..., R
ˆ ( K )]
R = [R
X
X
(A.3)
E a decomposição de valores singulares (SVD):
R = U R ΣV T
(A.4)
Para τ=1,...,K calcular:
ˆ ( τ )U
Fτ = U TR R
X
R
(A.5)
86
n
Escolher um valor inicial para o passo de busca α ∈ R
Calcular F = ∑τ =1 α τ Fτ
K
(A.6)
E fazer o teste da decomposição de Shur de F. Se F for definida positiva, continue no próximo
passo. Caso contrário, atualizar F conforme a seguir:
Escolha um autovetor u correspondente ao menor autovalor de F e
atualizar α = α + d onde:
d=
[ u T F1u ,...,u T FK u ] T
|| [ u T F1u ,...,u T FK u ] ||
(A.7)
E em seguida voltar ao passo anterior.
Calcular a combinação de matrizes de correlação C:
K
ˆ (τ )
C = ∑ατ R
X
(A.8)
τ =1
E calcular a decomposição em autovalores (EVD) de C:
C = U C diag [ λ12 ,..., λ2n ] U TC
Onde
(A.9)
λτ2 são os valores singulares de C e assim, a matriz de branqueamento pode ser estimada
como sendo:
V = diag [ λ1 ,...,λn ] −1 U TC
(A.10)
87
Referências
ALLEN, N. J., BARRES, B. A. (2005). „Signaling between glia and neurons: focus on synaptic plasticity. Curr.
Opin. Neurobiology. V.15, p.542–548.
BARKAI, L., & KEMPLER, P. (2000). Puberty as a Risk Factor for Diabetic Neuropathy. Diabetes Care, 23,
p.1044-1045.
BARON, C.B., IRVING, G.A. (2002), Effects of tourniquet ischemia on current perception thresholds in
healthy volunteers. Pain Practice, 2, p.129-133.
BASAR E., BASAR-EROGLU C., KARAKAS S., SCHÜRMANN M., (1999). „ Oscillatory Brain Theory: a
new trend in neuroscience. IEEE Eng Med Biol Mag, Vol 18, p.56-66.
BEAR, M.F., CONNORS, B.W., PARADISO, M.A., (2002). Neurociências, Desvendando o Sistema Nervoso.
Editora. Artmed. Porto Alegre. RS.
BELOUCHRANI A., CICHOCKI A., (2000)Robust Whitening Procedure in Blind Source Separation Context,
Electronics Letters, vol. 36, p. 2050-2051.
BELOUCHRANI, A., MERAIM, K. A., CARDOSO, J.-F., and E. MOULINES,(1997) A blind source
separation technique using second order statistics, IEEE Trans. Signal Processing, vol. 45, pp. 434-444.
BERGER, H. (1929). Über das Elektrenkephalogram des Menchen Arch Psychiatr Nervenkr. Vol. 87. P.527570.
BRAGA, E.Q., TIERRA-CRIOLLO, C.J., BRAGA, N.I.O., MANZANO, G.M., GRONICH, G.,(2006).
Potencial Evocado a Estímulo Elétrico Senoidal de 2 kHz Usando Wavelets. Anais do XX Congresso Brasileiro
de Engenharia Biomédica. Pág. 334-337
BRODAL, A., (1984), Anatomia Neurológica com Correlações Clinicas. 3 ed. Ed. São Paulo, Roca.
CARRÉ, P., FERNANDEZ-MALOIGNE, C. (2000). Undecimated Wavelet Shrinkage Estimate of the 1D and
2D Spectra. IEEE transactions on signal processing. P.2310-2313.
CAUSEVIC, E., MORLEY, R., VICKERHAUSER, V., JACQUIN, A.E.(2005) Fast Wavelet Estimation of
Weak Biosignals, IEEE Transactions On Biomedical Engineering, vol. 52, nº 6, p. 1021- 1032, June.
CHENG, W., JIANG, Y., CHUANG, L., HUANG, C., HENG, L., WU, H., TAI, T., & LIN, B.J. (1999),
Quantitative sensory testing and risk factors of diabetic sensory neuropathy, J Neurol, 246, p.394-398.
COHEN, H. (2001) Neurociência para Fisioterapeutas, Ed. Manole, São Paulo.
DAUBECHIES, I. (1991). Tem Lectures on Wavelets´. Philadelphia, PA: Society for Industrial and Applied
Mathematics
DESMEDT, J.E.,TOMBERG , C.(1989) Mapping early somatosensory evoked potentials in selective attention:
critical evaluation of control conditions used for titrating by difference the cognitive P30, P40, P100 and N140.
Electroenceph clin Neurophysiol, vol. 74, p. 321-346.
DINIZ, P. S. R., SILVA, E.A.B., NETTO, S. L. (2004). Processamento Digital de Sinais: Projeto e Análise de
Sistemas. Editora Bookman. Porto Alegre. p. 419-432)
88
DONOHO, D. L., (1995) De-noising by soft thresholding, IEEE Trans. Inform. Theory, vol. 41, pp. 613–627
DURKA, P. J., BLINOWSKA, K., J. (1998) Time Frequency and Wavelets in Biomedical Signal Processing.
Ed. Metin Akay, IEEE press, New York. p. 390-394.
DUUS, P.. (1997) .Diagnóstico Topográfico em Neurologia , Editora Cultura Médica.
GIBBS F.A, GIBBS EL. (1952) Atlas of eletroencephalography. Adisson-Wesley. Vol 2. Editora CambridgeMassesguster.
GUTTMANN, G., (1977), Introdução à Neuropsicologia, Editora Manole, São Paulo. p75-122
GUYTON, A., Hall, J. (1997) Tratado de Fisiologia Médica Ed. Guanabara Koogan.
HE, F., SUN, Y.E., (2006). Glial Cells More Than Support Cells, International Journal of Biochemistry and
Cells.
HERRMANN C.S., MUNK M.H.J., ENGEL A.K., (2004).Cognitive functions of gamma band activity: memory
match and utilization. Trends Cogn. Sci.. Vol. 8. p.347-355.
HYVRINEN, A., KARHUNEN, J., OJA, E. (2001). Independent Components Analysis, John Wiley & Sons
Canada, Ltd. 1st ed. Canada.
ICALAB: software livre. Versão 2.2. Japão, RIKEN Labs.,
<http://www.bsp.brain.riken.jp/ICALAB/>. Acesso em 10 de julho de 2006.
2004.
Disponível
em
:
INFANTOSI, A.F.C., ALMEIDA, A.G.C., (1990).A Microcomputer-Based System for Mapping EEG signals
after Source Derivation, Proc. Of the 1990 Colloquium in South America, pp.22-27.
JAMES, C.J., LOWE, D. (2003).Extracting multisource brain activity from a single electromagnetic channel.
Artificial Intelligence in Medicine v.28, p.89–104
JASPER, H.H., (1974).The 10-20 Electrode System of the International Federation in: Handbook of
Electroencephalography and Clinical Neurophysiology, vol.3, Amsterdam, Elsevier, Part. C, Appendix III.
KANDEL, E. R., SCHUWARTS J.H., JESSEL, T., M., (2000) Princípios da Neurociência, Ed. Manole, São
Paulo, p. 340-348, 430,910-927.
KATIMS, J.J., NAVIASKY, E.H., REDELL, M.S., BLEECKER, M.L., (1987) Constant Current Sine Wave
Transcutaneous Nerve Stimulation for Evaluation of Peripheral Neuropathy, Arch Phys Med Rehabil. p. 210213.
KEMPLER, P., VÁRADI, A., KÁDÁR, É., & SZALAY, F. (1994), Autonomic and peripheral neuropathy in
primary biliary cirrhosis: evidence of small fiber damage and prolongation of the QT interval, J Hepatol, 21, p.
1150-1151.
LIU, S.S., GERANCHER, J.C., BAINTON, B.G., KOPACZ, D.J., Carpenter, R.L. (1996), The effects of
electrical stimulation at different frequencies on perception and pain in human volunteers: epidural versus
intravenous administration of fentanyl, Anesth Analog, 82, p.98-102.
LIU, S., KOPACZ, D.J., CARPENTER, R.L. (1995), Quantitative Assessment of differential sensory nerve
block after lidocaine spinal anesthesia, Anesthesiology, 82, p.60-63
89
MCCOOEY, C., KUMAR, D.K., COSIC, I. (2005). Decomposition of Evoked Potentials using Peak Detection
and the Discrete Wavelet Transform. Proceedings of the 2005 IEEE Engineering in Medicine and Biology 27th
Annual Conference, Shanghai, China, September, p.2071-2074.
MAKEIG, S., BELL, A. J., JUNG, T-P., SEJNOWSKI, T. J.(1996). Independent Components Analysis of
Electroencephalographic Data. Adv Neural Info Proc Sys 8 pp. 145-151. Cambridge, MA: MIT Press
MAKEIG, S., JUNG T.P., BELL, A. J., Ghahremani, D., Sejnowski, T. J (1997). Blind separation of auditory
event-related brain responses into independent components.´ Proc. Natl. Acad. Sci. USA, Neurobiology, v.94,
p.10979–10984.
MALLAT, S. G. (1988), Multiresolution representations and Wavelet. University of Pennsylvania.
MALLAT, S.G, (1989) A theory for multiresolution signal decomposition: the wavelet representation, IEEE
Transactions on Pattern Analysis and Machine Intelligence, vol 11 (Jul.), pp. 674-693.
MALMIVIUO, J., PLONSEY, R., (1995). BIOELECTROMAGNETISM: Principles and Applications of
Bioelectric and Biomagnetic Fields , Oxford University Press, New York.
MANZANO, G.M., De NAVARRO, J.M., NÓBREGA, J.A.M., et al., (1995).Short Latency Median Nerve
Somatosensory Evoked Potential (SEP): Increase in Stimulation Frequency from 3 to 30 Hz.
Electroencephalography and Clinical Neurophysiology, v.96, n.3(May), pp.229-235.
MARK, M.S.(2000).Generalized averaging and noise levels in evoked responses. Computers in Biology and
Medicine, v.30, p.247-265.
MASSON, E.A., VEVES, A., FERNANDO, D., BOULTON, A.J.M. (1989), Current perception thresholds: a
new, quick, and reproducible method for the assessment of peripheral neuropathy in diabetes mellitus,
Diabetologia, 32, p.724-728.
MAUGUIÈRE, F., (1998). Somatosensoty Evoked Potentials: Normal Responses, Abnormal Waveforms and
Clinical Applications in Neurological Diseases. In: Niedermeyer, E., Lopes da Silva, F.H.(eds),
Electroencephalography – Basic Principles, Clinical Applications, and Related Fields, 4ed., chapter 56, New
York, USA, Williams & Wilkins.
MISITI, M., MISITI, Y., OPPENHEIM, G., POGGI, J.M..(2006).Wavelet Toolbox for use with Matlab. The
Math Works Inc. Natick, Massachusetts.
MISULIS, K. E., (1994) Spellman’s Evoked Potential Primer: visual, auditory, and somatosensory evoked
potentials in clinical diagnosis . Ed. Butterworth-Heinemann, Boston.
NISHIDA, S, NAKAMURA, M., SHIBASAKI, H. (1999). Physiological variability of peak latency in evoked
potentials: use of a property of asynchronous averaging Medical Engineering & Physics. v.21, p. 681–687.
NISHIMURA, A., OGURA, T., HASE, H., MAKINODAN, A., HOJO, T., KATSUMI, Y., YAGI, K.,
MIKANI, Y., & Kubo, T. (2003b). Objective evaluation of sensory function in patients with carpal tunnel
syndrome using the current perception threshold. J Orthop Sci, 8, p.625-628
NISHIMURA, A., OGURA, T., HASE, H., MAKINODAN, A., HOJO, T., KATSUMI, Y., YAGI, K.,
MIKANI, Y., & Kubo, T. (2003a), Evaluation of sensory function after median nerve decompression in carpal
tunnel syndrome using the current perception threshold test, J Orthop Sci, 8, p.500-504.
NISHIMURA, A., OGURA, T., HASE, H., MAKINODAN, A., HOJO, T., KATSUMI, Y., YAGI, K.,
MIKANI, Y., & KUBO, T. (2004). A correlative electrophysiologic study of nerve fiber involvement in carpal
tunnel syndrome using current perception thresholds, Clin Neurophysiology, 115, p.1921-1924.
90
NOSS, E.S., BOLES, C.D., YINGLING, C.D., (1996).Steady-state Analysis of Somatosensory Evoked
Potentials. Electroencephalography and Clinical Neurophysiology, v. 100, n.5(Sep), pp.453-461.
NUNEZ, P.L.,(1981) Electric Fields of the Brain: The Neurophysics of EEG, Ed. New York, Oxford University
Press.
PIMENTEL, J.M., PETRILLO R., VIEIRA, M.M.F., GIULIANO, L.M.P., TIERRA-CRIOLLO, C.J., BRAGA,
N.I.O, NÓBREGA, J.A.M., MANZANO G., M.(2006) Perception and Electric Senoidal Current Stimulation,
Arq Neuropsiquiatr, vol. 64, no 1, p.10-13.
RAMÓN y CAJAL, S.,(1995).Histology of the Nervous System of Man and Vertebrates, 2 vols. N Swanson, LW
Swanson (transl.).Oxford University Press. New York.
REGAN, D. (1989a) Human Brain Electrophysiology: Evoked Potentials and Evoked Magnetic Fields
in Science and Medicine. Ed. Elsevier, New York. P.48-57.
REGAN, D., (1989b) Human Brain Electrophysiology Ed. Elsevier, New York. p. 43-47.
RO, L., CHEN, S., TANG, L., HSU, W., CHANG, H., HUANG, C. (1999), Current perception threshold testing
in Fabry's disease. Muscle & Nerve, 22, p. 1531-1537.
SAMAR, V., BOPARDIKAR, A., RAO, R., SWARTZ, K., (1999). Wavelet Analysis of Neuroelectric
Waveforms: A Conceptual Tutorial. Brain and Language. Vol. 66, P. 7-60.
SARDY, S., TSENG P., BRUCE A.,(2001). Robust Wavelet Denoising. IEEE Transactions on Signal
Processing, v. 49, n°. 6, p.1146-1152.
SCHREIBER, T., SCHMITZ, A..(2000). Surrogate Times Series Physica. Vol 142 p.346-382.
SHARBROUGH F, CHATRIAN G-E, LESSER RP, LÜDERS H, NUWER M, PICTON TW (1991): American
Electroencephalographic Society Guidelines for Standard Electrode Position Nomenclature. J. Clin.
Neurophysiology 8: 200-2.
SPECKMANN, E.J., ELGER, C.E., (1998).Introduction to the Neurophysiological Basis of the EEG and DC
Potentials IN: Niedermeyer, E., Lopes da Silva, F.H.,(eds), Electroencephalography-Basis Principles, Clinical
Applications and Related Fields, 4ed., chapter 2, New York, USA, Williams&Wilkins.
TACK C.J.J., NETTEN P.M, SCHEEPERS M.H., MEIJER J.W.G., SMITS P., LUTTERMAN, J. (1994),
Comparison of clinical examination, current an vibratory perception threshold in diabetic polyneuropathy,
Netherlands J Med, 44, p. 41-49.
TAY, B., WALLACE, M.S., & IRVING, G. (1997), Quantitative assessment of differential sensory blockade
after lumbar epidural lidocaine. Anesth Analg, 84, p.1071-1075.
TIERRA-CRIOLLO, C.J., INFANTOSI, A.F.C.,(2006).Low Frequency Oscillations in Human Tibial Somato
Sensory Evoked Potentials. Separata, Arquivos de Neuropsiquiatria, V. 64, pp.402-406.
TIERRA-CRIOLLO, C.J.(2001).Monitoração Objetiva da Resposta à Estimulação Somato-Sensitiva Utilizando
Parâmetros Espectrais.Tese. COPPE/Universidade Federal do Rio de Janeiro.
TIERRA-CRIOLLO, C.J., Simpson, D.M., Infantosi, A.F.C., (1997).Resolución Espacial y Técnicas de
Interpolatión para Mapas Celebrales com Derivatión de la Fuente utilizando Simulaciones, Revista Mexicana
de Ingeniería Biomédica, vol. 18, n. 4, pp.21-28.
TURNER, S., PICTON, P., CAMPBELL, J.(2003). Extraction of short-latency evoked potentials using a
combination of Wavelet and evolutionary algorithms. Medical Engineering & Physics, v.25, p.407–412
91
VÁRKONYI, T.T., TÓTH, F., ROVÓ, L., LENGYEL, C., KISS, J.G., KEMPLER, P., & LONOVICS, J.
(2002), Impairment of the auditory brainstem function in diabetic neuropathy, Diab Care, 25, p.631-632.
VEVES, A., YOUNG, M.J., MANES, C., BOULTON, A.J.M. (1994), Differences in peripheral and autonomic
nerve function measurements in painful and painless Neuropathy, Diab. Care, 17, p.1200-1202.
VINIK, A.I., SUWANWALAIKORN, S., STANSBERRY, K.B., HOLLAND, M.T., MCNITT, P.M., COLEN,
L.E. (1995), Quantization measurement of cutaneous perception in diabetic neuropathy, Muscle & Nerve, 18, p.
574-584.
WALLACE, M.S., DYCK, J.B., ROSSI, S.S., & YAKSH, T.L. (1996). Computer-controlled lidocaine infusion
for the evaluation of neuropathic pain after peripheral nerve injury, Pain, 66, p. 69-77.
WALLIN, G., STALBERG, E. (1980). Source Derivation in Clinical Toutine EEG, Electroencephalography and
Clinical Neurophysiology, v. 50, n.3-4(Nov), pp. 282-292.
YAMASHITA, T., KANAYA, K., SEKINE, M., TAKEBAYASHI, T., KAWAGUCHI, S., & KATAHIRA, G.
(2002), A quantitative analysis of sensory function in lumbar radiculopathy using current perception threshold
testing, Spine, 27, p. 1567-1570.
92