4. Introdução à Relatividade
Um pouco de história:
1) Ao contrário do que se possa imaginar, a relatividade é na verdade
um dos princípios fundamentais da Física Clássica, posteriormente da
Física Moderna e Contemporânea.
-> ex.: muito antes de Einstein já se estudava a relatividade do
Movimento Retilíneo Uniforme (MRU) na mecânica.
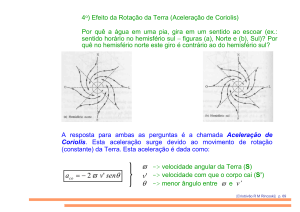
y
De onde se originou a
expressão conhecida como:
“velocidade relativa”?
vC
vA
x
vB
v AB = v B − v A
v AC = v A + vC
-> ex.: velocidades medidas nos referenciais
v S = 0 km / h , v A = +60 km / h , v B = +80 km / h e vC = −50 km / h
solo
carro A v S = −60 km / h , v A = 0 km / h , v B = +20 km / h e vC = −110 km / h
[Cristóvão R M Rincoski] p. 56
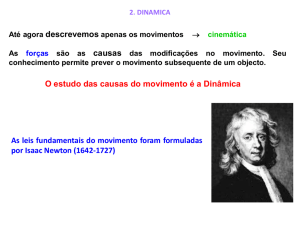
2.a) O conceito de relatividade, se analisado com mais profundidade,
remonta à Grécia Antiga quando constataram que a Terra era esférica
(lembrar que antes disso a Terra era considerada plana). A vertical era
um conceito relativo à superfície esférica da Terra.
-> então, o conceito de vertical se tornou um conceito relativo à esfera
(Terra).
linha vertical
relativa à
superfície da
Terra
Quando falamos de vertical ou horizontal
entendemos
isto
completamente,
ou
precisamos de mais informação (ex.: uma
referência)?
Terra
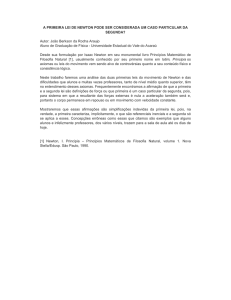
2.b) Aristarco de Samos (320 AC ~ 250 AC) foi o primeiro a propor que a
Terra gira em torno do Sol (Sistema Heliocêntrico), inspirado nas
concepções de Pitágoras.
-> o Sistema Heliocêntrico especifica o movimento relativo da Terra
em torno do Sol.
[Cristóvão R M Rincoski] p. 57
Terra
Sol
Terra
Sol
Sistema Geocêntrico
Sistema Heliocêntrico
Se a Terra ou o Sol, está no centro do “sistema solar”, isto não implica em
estarmos estabelecendo um referencial (“sistema de referência”) em
relação ao qual o movimento é relativo?
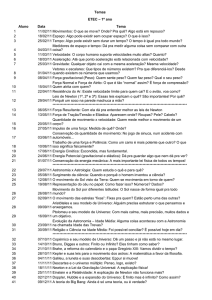
4.1. Referenciais ou Sistemas de Referência
y’
S -> referencial fixo em relação ao solo
y
x’
S’
z’
x
z
S
v
S’ -> referencial móvel em relação ao solo
v
-> velocidade constante com que S’ se
move em relação a S
[Cristóvão R M Rincoski] p. 58
1) Um sistema de referência estabelece uma “base” para qual todo o
movimento pode ser observado e medido.
2) Um objeto pode ter diferentes velocidades para diferentes sistemas de
referência (ver exemplo p. 56).
4.2. As Duas Relatividades (Galileu e Einstein)
1a) Relatividade de Galileu (ou galileliana)
A primeira teoria da relatividade, no âmbito da Física Clássica, foi
desenvolvida inicialmente por Galileu Galilei (em italiano Galileo Galilei,
Pisa, 15 de fevereiro de 1564 − Florença, 8 de janeiro de 1642).
-> relatividade galileliana: termo originariamente utilizado por Einstein.
1) A Relatividade de Galileu se aplica a Referenciais, ou Sistemas
de Referência, Inerciais.
-> Referencial Inercial: referencial em repouso ou em movimento
retilíneo uniforme (MRU) − não acelerado − em relação a outro
referencial.
[Cristóvão R M Rincoski] p. 59
-> Por quê a Primeira Lei de Newton é a Lei da Inércia? Por quê
A Lei da Inércia não podia ser a segunda ou a terceira lei?
Isto acontece porque é esta Lei que estabelece os referenciais para os
quais as demais Leis são válidas, na forma que conhecemos, isto é, a
Segunda Lei de Newton (que envolve força sobre o corpo, reagindo com
massa inercial do corpo e a aceleração do corpo) e a Terceira Lei de
Newton (Lei da Ação e Reação, esta também envolve forças, mas que
atuam sobre corpos diferentes, mesmo referencial) -> ver Aplicações 1º
caso (p. 65 e 66).
Grandezas Invariantes: força, massa, aceleração e o tempo são
invariantes para todos referenciais inerciais.
Princípio da Invariância: as leis físicas devem ter a mesma forma em
todos os referenciais inerciais.
2) O referencial inercial mais usado, na época, era chamado “éter”
(antes eram as “estrelas fixas”).
-> Éter: era um Referencial Absoluto, todos os demais se
moviam em relação a este, inclusive planetas, luas, estrelas,
galáxias, etc..
-> de acordo com a mecânica, contemporânea de Galileu
(1564−1642) e Newton (1643−1727), a luz necessitava deste
meio para se propagar (hoje entendemos que a luz não
necessita de meio físico para se propagar).
[Cristóvão R M Rincoski] p. 60
3) O tempo, na concepção de Galileu, deveria ser um “invariante
universal”, ou seja, o tempo é absoluto. Isto deu origem às
Transformações de Coordenadas de Galileu.
-> um mesmo instante de tempo medido num referencial deveria
ser o mesmo tempo medido em qualquer referencial inercial.
-> uma conseqüência disto é a que o comprimento permanece
inalterado (“invariante”). Ex.: ΔLS = ΔL’= ΔL’’ = ΔL’’’, etc., para
referenciais se movendo com v = constante (ou inerciais).
a) Transformações de Galileu: Condições Iniciais
Condições iniciais -> ambos referenciais coincidem: tS = t’ = 0 s
y
y
y’
y’
S’
z’
z
S
P
P
x’
yo ≡ yo’
x
v
x’
S’
v
S
z’
z
x
zo ≡ zo ’
xo ≡ xo’
t S 0 = t0' = t0 = 0 s, x0 = x0' , y0 = y0' e z0 = z0'
[Cristóvão R M Rincoski] p. 61
b) Transformações de Galileu: Equações
Após um determinado tempo: tS = t’ = t > 0
y’
P
y
S’
z’
x’ x’
P
v
z
vt
v
x’
xS = x ' + vt ,
zS = z '
tS = t ' = t
x
z’
z S
z
yS = y ' ,
y’
y
x
S
y’
y
vt
z’
xS
S’
x’
x’
Estas
equações
são
conhecidas
como
Transformações de Galileu, Transformações de
Coordenadas de Galileu ou transformações
galilelianas (o tempo e o comprimento continuam
sendo invariante, isto é, um relógio em S marca o
mesmo tempo que em S’, e, uma régua de 30 cm
em S tem 30 cm em S’).
[Cristóvão R M Rincoski] p. 62
y’
P
y
P
v’
S’
z’
x’
v
v
x
z’
S
vS
S
v’
y’
x
z
y’
y
z
z’
x’
S’
v
v’
vS
vS = v '+ v
aS = a '
Estas equações são as Transformações de Galileu, para a
velocidade e aceleração, respectivamente, medidas nos
referenciais S e S’.
onde:
vS
v'
-> velocidade instantânea do objeto movendo em relação a S.
-> velocidade instantânea do objeto movendo em relação a S’.
v -> velocidade constante de S’ movendo em relação a S.
a S -> aceleração instantânea do objeto em relação a S.
a ' -> aceleração instantânea do objeto em relação a S’.
[Cristóvão R M Rincoski] p. 63
Dedução das Transformações de Galileu para Velocidade e Aceleração:
1) De x S = x '+ vt considerando:
Δx S -> comprimento medido no referencial S.
Δx ' -> comprimento medido no referencial S’.
Δt -> tempo medido nos referenciais S e S’.
Δx S = Δx ' + v Δt , como v S =
Δx S Δx '
Δt
Δx S
Δx '
+v
=
e v '=
então
Δt
Δt
Δt
Δt
Δt
1
vS = v ' + v
2) De
v S = v ' + v considerando:
Δv S -> velocidades medidas no referencial S.
Δv ' -> velocidades medidas no referencial S’.
Δv = 0 -> a velocidade de S’ é constante.
Δv S = Δv ' + Δv, como a S =
Δv '
Δv S
Δv S Δv ' Δv
a
'
=
e
então
=
+
Δt
Δt
Δt
Δt Δt
0
aS = a '
[Cristóvão R M Rincoski] p. 64
c) Aplicações: Referenciais Não Inerciais
1o) 2ª Lei de Newton para Referencial em Movimento Retilíneo
Uniformemente Acelerado (com aceleração A = constante)
onde t S = t ' = t e v = v0 + At
y’
y
m
F’
x
S
v’
a’
A
x’
S’
v0
v S = v ' + v0 + A t
v’
z
v0
z’
aS = a ' + A
At
vS
Destas relações vemos m a S = m a ' + m A e portanto:
FS = m a S
A 2ª Lei de Newton não se altera para quaisquer
referenciais inerciais.
F '= m a ' + m A
A 2ª Lei de Newton não é válida, como m a,
para quaisquer referenciais não inerciais.
[Cristóvão R M Rincoski] p. 65
FS = F '
As Leis de Newton se aplicam a todos os referenciais,
inerciais ou não -> “Forças Verdadeiras”.
Se fizermos F * = F ' − m A onde F * = m a ' , então, ficamos com:
Fin = − m A
agindo assim, manteremos a forma geral das leis de
Newton, onde, comparamos o termo adicional com
uma força e portanto, F* se comporta como uma força
resultante no referencial S’. Este segundo termo (−mA)
chamamos de “Forças Inerciais” ou “Forças
Fictícias”.
2o) Movimento Circular Uniforme (MCU)
Apesar de termos a velocidade tangencial de módulo constante,
também temos a aceleração do movimento circular. Então podemos
aplicar as Leis de Newton para o MCU?
Na verdade sim e não, as Leis valem para qualquer referencial, mas, este
sistema é acelerado e portanto as Leis de Newton não são aplicadas na
forma como conhecemos.
Vamos analisar o que acontece com a força centrípeta.
[Cristóvão R M Rincoski] p. 66
Fcentripeta
v2
=m
r
Neste caso, a força centrípeta é a força voltada para o centro do círculo
(MCU), e a força centrífuga aponta para fora do círculo. Estas forças não
obedecem à uma “ação e reação”, pois a força centrífuga depende do
movimento circular (−m A), não sendo uma reação à força centrípeta.
Logo temos uma terceira Lei de Newton um pouco distorcida, pois a força
centrífuga não é resultado, ou reação, da centrípeta.
Isto é a: a causa, a força (F) é inalterada, mas o efeito provocado no
objeto, relacionado com esta força (que seria m a) − nestes referenciais
não inerciais − mudam de forma (ex.: adiciona termos → −m A) como visto
no slide anterior.
Este é um sistema onde a aceleração existe (voltada para o centro ou
central), isto é, não é um referencial inercial, e as Leis de Newton devem
sofrer modificações no que se refere aos efeitos provocados por estas
forças -> não expressamos na forma: m a, pois temos termos adicionais
(−m A).
Ex.: amarramos uma corda em uma pedra e giramos a pedra, se em
algum momento a corda rompe, a pedra não sai de acordo com a
reação à força tensão no fio (supostamente seria a força centrífuga,
isto é, Fcentrífuga = −m A). Neste caso a pedra sai tangente ao
movimento circular pois com A = 0 m/s2 e Fcentrífuga = 0 N, então, só
resta v = constante para determinar o movimento.
[Cristóvão R M Rincoski] p. 67
3o) Peso “aparente” de um corpo num elevador
Como um corpo pode mudar de “peso” estando em um elevador que
sobe ou desce, com uma aceleração constante A?
Este sistema, quando apresenta aceleração (ex.: quando o elevador sobe
com uma aceleração A, ou desce com uma aceleração −A) impõe uma
alteração na força peso, esta deixa de ser m g (ou seja m a). O
referencial, não inercial, altera a 2a Lei de Newton e a força peso passa a
ser P = m (g − A) ou P = m (g + A), dependendo do caso, se está subindo
ou descendo. Então, a aceleração do referencial altera a lei de Newton.
Perceba, que quando temos A = 0 m/s2, recuperamos a 2a Lei de Newton
(P = m g), ou seja, quando o referencial volta a ser inercial (v = constante),
temos as leis de Newton na forma original.
[Cristóvão R M Rincoski] p. 68
Diálogo sobre os Dois Principais Sistemas do Mundo Ptolomaico e Copernicano
Galileu Galilei
“SALVIATI ... Encerre-se com um amigo na cabina principal sob o convés de um navio grande, lavando
consigo moscas, borboletas e outros animaizinhos voadores. Leve também um grande aquário com alguns
peixes, pendure uma garrafa pingando gota a gota num recipiente largo abaixo dela. Com o navio parado,
observe cuidadosamente como os animaizinhos voam com a mesma velocidade em todas as direções na
cabina. Os peixes nadam indiferentemente em todas as direções; as gotas caem no recipiente em baixo da
garrafa; e ao jogar algo ao seu amigo, não é preciso jogar com mais força numa direção que em outra, as
direções sendo iguais; ao saltar de pés juntos,você atravessa distâncias iguais em qualquer direção. Depois
de observar cuidadosamente todas as coisas (embora não haja dúvida de que têm de ocorrer desta forma
com o navio parado), faça o navio colocar-se em velocidade que quiser, contanto que o movimento seja
uniforme e não flutue para um lado ou outro. Você não perceberá a mínima alteração em qualquer dos efeitos
mencionadas, e será impossível dizer por qualquer um deles se o navio está parado ou em movimento. Ao
pular, você atravessará no chão as mesmas distâncias que antes, e não dará saltos maiores para a popa do
que para a proa, mesmo que o navio esteja se movendo rapidamente, apesar do fato de que, durante o seu
tempo de permanecia no ar, o chão debaixo de seus pés se esteja deslocando em sentido oposto ao de seu
salto.
Ao jogar algo a seu companheiro, você não precisará de mais força para atingi-lo se estiver na sua
frente em direção à proa ou à popa. As gotas continuarão caindo no recipiente de baixo sem tender em
direção à popa, embora permaneça no ar durante o deslocamento do navio. Os peixes na água nadarão para
a frente do aquário sem fazer mais esforço do que para trás, e se dirigirão com igual facilidade para as iscas
colocadas em qualquer direção na beira do aquário. Finalmente, as borboletas e moscas continuarão voando
indiferentemente para todos os lados, e jamais sucederá que se concentrem do lado da popa, com se
cansadas de acompanhar a marcha do navio, do qual estiveram separadas por longos intervalos,
sustentando-se no ar. ...
SAGREDO. Embora não me tenha ocorrido testar essas observações enquanto viajava, estou certo de que
ocorreriam da forma que você descreve. Como confirmação disto, recordo-me de ter-me encontrado muitas
vezes em minha cabina sem saber se o navio estava em movimento ou parado; e às vezes, por capricho,
imaginei que estivesse a mover-se num sentido quando o seu movimento era o oposto.”
[Cristóvão R M Rincoski]