2. DINAMICA
Até agora descrevemos apenas os movimentos
cinemática
As forças são as causas das modificações no movimento. Seu
conhecimento permite prever o movimento subsequente de um objecto.
O estudo das causas do movimento é a Dinâmica
As leis fundamentais do movimento foram formuladas
por Isaac Newton (1642-1727)
Tycho Brahe
(1546-1601)
~ 100 anos
Johanes Kepler
(1571-1630)
Galileu Galilei
(1564-1642)
Isaac Newton
(1642-1727)
LEIS DE NEWTON
As leis que descrevem os movimentos de um corpo foram concebidas por Isaac
Newton em 1665-66
Hoje em dia são conhecidas como as Leis de Newton
e foram baseadas em cuidadosas observações dos
movimentos.
A publicação do trabalho aconteceu em 1687 no livro
Philosophiae
Naturalis
Principia
Mathematica
(Princípios Matemáticos da Filosofia Natural).
Publicou também nesse livro a lei da gravitação
universal
As leis de Newton permitem uma descrição (e
previsão) extremamente precisa do movimento de
todos os corpos, simples ou complexos.
Apenas em dois limites as Leis de Newton deixam
de ser válidas: na dinâmica de sistemas muito
pequenos (física quântica) ou em situações que
envolvem velocidades muito grandes (teoria da
relatividade restrita).
2. DINAMICA
Força
Estudaremos a mudança no movimento de partículas utilizando os conceitos de força e de massa
As três leis fundamentais do movimento formuladas por Isaac Newton
são baseadas em observações experimentais
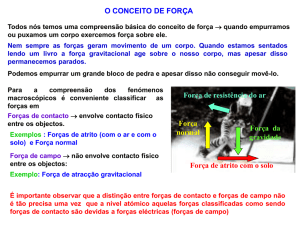
O CONCEITO DE FORÇA
Todos nós temos uma compreensão básica do conceito de força quando empurramos
ou puxamos um corpo exercemos força sobre ele.
Nem sempre as forças geram movimento de um corpo. Quando estamos sentados
lendo um livro a força gravitacional age sobre o nosso corpo, mas apesar disso
permanecemos parados.
Podemos empurrar um grande bloco de pedra e apesar disso não conseguir movê-lo.
Para
a
compreensão
dos
fenómenos
macroscópicos é conveniente classificar as
forças em
Forças de contacto envolve contacto físico
entre os objectos.
Exemplos : Forças de atrito (com o ar e com o
solo) e Força normal
Força de campo não envolve contacto físico
entre os objectos:
Força de resistência do ar
Força
normal
Força da
gravidade
Força de atrito com o solo
Exemplo: Força de atracção gravitacional
É importante observar que a distinção entre forças de contacto e forças de campo não
é tão precisa uma vez que a nível atómico aquelas forças classificadas como sendo
forças de contacto são devidas a forças eléctricas (forças de campo)
RESULTANTE DE FORÇAS
A resultante de i forças que agem sobre um corpo é:
FResultante F1 F2 F3 Fi
Exemplo
N
Diagrama de corpo livre
isolamos o corpo em questão e
colocamos
todas as forças
externas que agem sobre
o
corpo.
P1
T
T
P2
A PRIMEIRA LEI DE NEWTON
Aristóteles
Antes de 1600 os cientistas acreditavam que os corpos em
movimento sobre a Terra tendiam ao repouso se nenhuma força
actuasse sobre ele
Galileu observou que a natureza de um corpo é de resistir a mudanças em seu
movimento
No livro "Diálogo a Respeito de duas Novas Ciências", Galileu apresenta o problema
do plano inclinado
Estudando o movimento de diversos objectos sobre um plano inclinado ele observou
que quando um objecto rola de cima para baixo no plano inclinado o objecto esta
sujeito a uma aceleração, quando o objecto e lançado de baixo para cima no plano
inclinado, o objecto sofre uma desaceleração. Observe a figura abaixo:
“O movimento ao longo de um plano horizontal deve ser permanente."
A propriedade de um corpo de permanecer em movimento numa linha recta foi
chamado por Galileu de LEI DA INÉRCIA
Mais tarde Newton formalizou esta observação, que é conhecida como sendo a
PRIMEIRA LEI DO MOVIMENTO DE NEWTON
“Na ausência de forças externas, um corpo em repouso permanece em
repouso e um corpo em movimento permanece em movimento com
velocidade constante (com velocidade escalar constante e em linha recta)”
Quando não agem forças sobre um corpo a sua aceleração é nula e a
velocidade é constante
F 0 v cte
O vector posição é
r r0 v t
dv
a
0
dt
O repouso é apenas o caso particular em que
v 0
Do ponto de vista da dinâmica, ausência de forças e resultante de forças
nula são equivalentes
REFERENCIAIS INERCIAIS (DE INÉRCIA)
Se a força total que actua sobre uma partícula é zero, existe um conjunto de
sistemas de referência, chamados inerciais, nos quais ela permanece em
repouso ou em movimento retilíneo e uniforme (tem aceleração nula)
Se um referencial é inercial, qualquer outro referencial que se mova com
velocidade constante em relação a ele é também um referencial inercial.
Um referêncial inercial é aquele no qual a 1ª lei de Newton é válida
Na maioria das situações práticas (pequenos deslocamentos) pode-se
considerar uma boa aproximação de referencial, um sistema de referência
fixo na superfície da Terra
Quando os efeitos de rotação da Terra em torno de seu eixo não são
desprezáveis, é necessário escolher outro referencial porque referenciais em
rotação não são inerciais
Neste caso um referencial em repouso em relação às estrelas distantes
(“fixas”) é a melhor escolha de um referencial inercial.
MASSA INERCIAL
A massa inercial é a medida da resistência de um corpo a uma mudança no
movimento em resposta a uma força externa
Quantificamos essa resistência como a massa do corpo
É mais fácil arremessar uma bola de basquete ou uma bola de ténis ?
A bola de basquete tem mais massa inercial que a bola de ténis, portanto é
mais difícil modificar o movimento da bola de basquete
A SEGUNDA LEI DE NEWTON
Quando exercemos uma força horizontal
F
sobre um bloco de madeira que se encontra
numa superfície horizontal sem atrito, o bloco se desloca com uma aceleração
F1 F
a
a1 a
A experiencia mostra que se aplicarmos uma força duas vezes maior, a aceleração
duplica
F2 2F
a2 2a
e se aplicarmos uma força 3 vezes maior a aceleração triplica
F3 3F
a3 3a
As observações referidas anteriormente (massa inercial e o exemplo anterior) estão
resumidas na SEGUNDA LEI DE NEWTON
“A aceleração de um corpo é directamente proporcional à força resultante que age
sobre ele e inversamente proporcional a sua massa”
a f
onde
f
F
m
é a força resultante
A segunda Lei de Newton na forma matemática é
f ma
Válida apenas quando a massa do corpo permanece constante. Para situações em que
a massa muda com o tempo temos que utilizar a forma alternativa da 2ª lei de Newton
onde se utiliza o momento linear (ou quantidade de movimento)
p mv
Unidade do momento linear no
SI: kg m/s
Unidade de força no SI:
Assim a segunda Lei de Newton é
1 N 1 kg m/s 2
O efeito da força sobre um corpo é mudar a quantidade de movimento desse corpo
A SEGUNDA LEI DE NEWTON E O REFERENCIAL INERCIAL
Tal como formulada ( Fi ma
), a segunda lei de Newton é válida apenas em
referenciais inerciais. Em referenciais não inerciais ela deve sofrer correções.
g
g
P
Observadores em dois referenciais inerciais
concordam entre si sobre a resultante de forças
agindo sobre o corpo e sobre sua aceleração.
Neste caso a força é o peso da bola
P mg
P