E-books
PCNA
FÍSICA
CAPÍTULO 3
VOL. 3 – LEIS DE NEWTON
2
FÍSICA CAPÍTULO 3
Sumário
3
LEIS DE NEWTON
3.1
3.2
3.3
3.4
3.5
3.6
4
Objetivos de aprendizagem: . . . . . . . . . . .
Introdução . . . . . . . . . . . . . . . . . . . . .
Referencial do ponto de vista da dinâmica . .
Primeira lei de Newton (Princı́pio da Inércia)
Relação vetorial entre velocidade e aceleração
Segunda lei de Newton . . . . . . . . . . . . . .
3.6.1
Princı́pio da superposição das
3.7 Relação entre força e aceleração .
3.8 Terceira lei de Newton . . . . . . .
3.9 Diagrama de corpo livre . . . . . .
Principais pontos dos capı́tulos . . . . . .
PERGUNTAS CONCEITUAIS . . . . . .
REFERÊNCIAS BIBLIOGRÁFICAS . .
forças
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Página | 2
4
4
5
8
9
11
12
13
15
17
21
22
25
3
FÍSICA CAPÍTULO 3
Apresentação
Ao chegar à UFPA, você tem a possibilidade de cursar gratuitamente cursos de nivelamento em Ciências Básicas (Fı́sica,
Quı́mica e Matemática). Assistindo às aulas no próprio ambiente em que cursará sua graduação, isso auxiliará você a adquirir o conhecimento necessário para enfrentar melhor o programa
curricular do seu curso. Então seja Bem-vindo ao Curso de Nivelamento em Fı́sica Elementar do PCNA. Este é o terceiro de
uma série de cinco E-books que vão lhe acompanhar durante o
curso, o professor utilizará este material como apoio às suas aulas e é fundamental que você o leia e acompanhe as atividades
propostas.
A série “E-books PCNA-Fı́sica” foi desenvolvida com o propósito de apresentar o conteúdo do curso de Fı́sica Elementar,
fornecendo também ferramentas para facilitar o ensino e a aprendizagem da disciplina Fı́sica Fundamental I que você irá encontrar em breve na sua graduação.
Neste fascı́culo você irá encontrar o conteúdo de Leis de Newton. É bom lembrar que não se pode aprender Fı́sica Fundamental I sem alguns pré-requisitos, que muitas das vezes não valorizamos por acharmos simples e descomplicados, todavia, atenção
e compreensão se fazem necessária.
Página | 3
4
FÍSICA CAPÍTULO 3
CAPÍTULO 3
3
LEIS DE NEWTON
3.1
Objetivos de aprendizagem:
• Entender a diferença entre referenciais inerciais e não inerciais.
• Aprender o significado de força resultante e força resultante
nula.
• Aprender como relacionar força resultante, massa e aceleração de um corpo.
• Identificar as forças decorrentes da interação entre dois corpos.
3.2
Introdução
Uma pergunta interessante para iniciar este tópico seria: O
que é mecânica do ponto de vista da Fı́sica? Podemos dizer que a
mecânica é uma área da fı́sica que trata as questões de movimento
dos corpos levando em conta, de uma maneira geral, as causas
do movimento. Nesse sentido, a mecânica inclui a cinemática e
a dinâmica. A mecânica estuda também situações de equilı́brio
dos corpos (estático e dinâmico) e, portanto, podemos dizer que
a estática também está compreendida nessa importante área da
fı́sica. Acrescenta-se também que se o corpo ou sistema fı́sico se
movimenta de maneira acelerada, a descrição desse tipo de movimento também é objeto de estudo da mecânica. Uma outra
maneira de descrever a mecânica é por meio da influência que
corpos exercem nas interações entre si via forças (sejam forças
de contato ou de qualquer outra natureza). Vemos que não temos pouca coisa pela frente: Interações entre corpos; estudos
de situações de equilı́brio e de movimento acelerado, entre outras tantas coisas. Do ponto de vista de formação profissional, a
Página | 4
5
FÍSICA CAPÍTULO 3
mecânica é imprescindı́vel para o engenheiro, qualquer que seja
a sua área. Do ponto de vista de percepção e entendimento do
mundo ao nosso redor é tão importante quanto o aspecto formativo. Convidamos então você para ir adiante ao fascinante estudo
da mecânica!
Neste contexto, estudaremos a Dinâmica: que é a parte da
Mecânica que estuda os movimentos e as causas que os produzem ou os modificam. Costumamos construir o arcabouço da
mecânica a partir do enunciado das Leis de Newton. As Leis
de Newton formam um conjunto consistente para descrever uma
imensa variedade de situações e fenômenos que vemos ao nosso redor. É nosso dever entender ao máximo o que significa cada uma
dessas leis. É também muito importante entender as relações que
cada uma das leis possui entre si, ou seja, não devemos apenas
pensar em cada uma das leis separadamente. Antes disso, vamos
olhar rapidamente a questão do referencial voltada para o estudo
da dinâmica.
3.3
Referencial do ponto de vista da dinâmica
Conforme veremos, ao falar sobre Leis de Newton precisaremos saber em que referenciais tais leis são válidas (tais como a
conhecemos) e em que referenciais não são válidas. No caso da
1a Lei falaremos também sobre estado de repouso de um corpo.
Todas essas questões fazem necessária uma pequena discussão
sobre o conceito de referencial. Vamos trazer algumas situações
do cotidiano para discutir sobre esse conceito.
Imagine que você está no banco de trás de um carro a
40 Km/h. Para o motorista, você está parado, com velocidade
igual a 0 km/h. Já para alguém que te observa da calçada, você
está se locomovendo a 40 Km/h. Quem está errado nessa discussão? Resposta: Ninguém! As análises, tanto do ponto de
vista de um referencial (o motorista) quanto do outro referencial (o observador na calçada) são válidas. Portanto, desta simples discussão podemos tirar algumas conclusões importantes: 1Repouso (ausência de movimento) é algo relativo (repouso em
Página | 5
6
FÍSICA CAPÍTULO 3
relação a quem?). Depende do referencial adotado! 2 – Velocidade também é um conceito referente a algum referencial’
(velocidade em relação a quem?). Em relação ao estado de repouso, alguém pode tentar argumentar que um referencial fixo
em relação à superfı́cie da Terra (uma árvore, por exemplo) está
absolutamente em repouso. Mas se levarmos em conta que a
Terra também está em movimento, como fica essa “certeza”?
Bem, do que já sabemos pelos avanços da Fı́sica e da Astronomia, ao contrário do que se cogitava na antiguidade, não existe
movimento absoluto e nem repouso absoluto. Temos que prestar
atenção no referencial que estamos adotando para fazer a análise
do movimento. O estudo do referencial reserva ainda algumas
surpresas. Veremos que nem todos os referenciais são equivalentes, e entender esse ponto é muito importante para a correta
compreensão das Leis de Newton.
Mais um exemplo (na verdade estamos realizando experiências
de pensamento1 !). Imaginemos agora que nos encontramos num
elevador movendo-se para baixo num movimento retilı́neo com velocidade constante. Se o observador que se encontra dentro dele
deixar cair um objeto, ele cairá normalmente por ação da força
de gravidade normal. Imaginemos agoraque num dado instante
há um problema com o cabo e o elevador entra em queda livre.
Se o observador largar agora o mesmo objeto ele não cairá (em
relação ao observador que também está caindo aceleradamente).
No primeiro caso (elevador que desce com velocidade constante) podemos tomar o observador como sendo um referencial
inercial. Na outra situação (cabo arrebentado) o “pobre” observador que está no elevador não pode mais ser tomado como
um referencial inercial. É, portanto, um referencial não-inercial.
Aqui avisamos ao leitor que o estudo de referencial é algo bem sutil e procuraremos ser tão “light” quanto possı́vel, mas sem perder
1
Experiências de pensamento são recursos utilizados por grandes fı́sicos,
tais como Galileu Galilei e Albert Einstein. Em tais experiências o arcabouço
teórico é utilizado e as consequências podem ser deduzidas sem custos e sem
riscos para ninguém. Não substitui a experiência de fato, mas nem por isso
deixam de ser interessantes.
Página | 6
7
FÍSICA CAPÍTULO 3
de vista que referencial inercial e referencial não inercial do
ponto de vista fı́sico e matemático são não equivalentes, portanto
não devem ser confundidos2 . Vamos colocar a questão de duas
maneiras simples e complementares. A primeira é que um referencial que está sofrendo uma aceleração é não inercial. A outra
é a seguinte. Só é válida a aplicação direta das leis de Newton em
referenciais inerciais. Se um observador está em um referencial
acelerado ele sentirá o efeito de força(s) que ele não conseguirá
descrever no próprio referencial. O efeito dessa(s) força(s) é tão
real quanto qualquer outra. Não duvide disso, prezado leitor!
(quem nunca foi “espremido” contra a parede de um ônibus fazendo uma curva?). O ponto é que nosso corpo “sabe” quando
estamos submetidos a acelerações apreciáveis (comparáveis à aceleração da gravidade ou maiores). Mas o observador não conseguirá descrever essa(s) força(s) do ponto de vista do próprio
referencial. Por esse motivo essa força(s) é(são) chamada(s) de
força(s) fictı́cia(s). O que o leitor precisa mesmo ter em mente é
o seguinte:
IMPORTANTE!
1- Um referencial inercial não está acelerado.
2- A aplicação e entendimento das leis de Newton conforme estudaremos nesse material são
válidos para referenciais inerciais.
2
Apenas para o leitor saber. A Terra por conta dos movimentos que
executa em seu “passeio” pelo espaço sideral sofre efeito de acelerações. Ou
seja, “para valer, para valer mesmo”, a Terra não é um referencial inercial.
Como essas acelerações são muito pequenas quando comparadas à aceleração
da gravidade, nós consideramos apenas de maneira aproximada a Terra como
sendo um referencial inercial. Isso quer dizer que numa grande variedade de
experimentos de mecânica que realizamos em laboratório os resultados não
são afetados apreciavelmente por conta dos movimentos acelerados que o
nosso planeta sofre.
Página | 7
8
3.4
FÍSICA CAPÍTULO 3
Primeira lei de Newton (Princı́pio da Inércia)
A primeira lei de Newton afirma que se a força resultante,
atuante sobre um corpo é nula, então o corpo que estiver em
repouso, permanecerá em repouso ou se estiver em movimento
com velocidade constante, ele continuará nesse mesmo movimento..
Em outras palavras, essa propriedade da matéria de resistir a
qualquer variação em sua velocidade recebe o nome de inércia.
Essa propriedade é diretamente proporcional à massa do corpo.
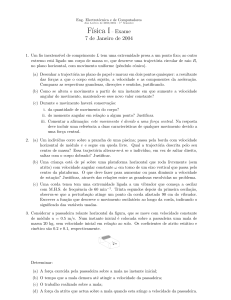
Figura 1: Quanto mais lisa a superfı́cie, mais longe um disco
desliza após tomar uma velocidade inicial.Se ele se move em um
colchão de ar sobre a mesa (c) a força de atrito é praticamente
zero, de modo que o disco continua a deslizar com velocidade
quase constante (YOUNG. H. D; FREEDMAN. Fı́sica 1-Sears &
Zemansky. Mecânica. 12a . Edição. Ed. Pearson)
A 1a Lei de Newton pode ser ilustrada com algumas experiências de pensamento (ok, podem ser ilustradas na prática
também!). Quem já andou de carro, ônibus ou avião sabe que
quando o meio de transporte viaja com velocidade estabilizada
em linha reta tudo se passa como se o mesmo estivesse parado.
Mas tudo muda quando o meio de transporte sofre uma variação
de direção ou no módulo da velocidade.
Página | 8
9
3.5
FÍSICA CAPÍTULO 3
Relação vetorial entre velocidade e aceleração
Não são poucos alunos que confundem conceitualmente e
operacionalmente dois conceitos vetoriais muito importantes para
a dinâmica: velocidade e aceleração.
São conceitos que estão relacionados, mas são distintos. É
fundamental que o leitor tenha em mente o seguinte. Velocidade
é um vetor, e qualquer variação nesse vetor (velocidade) corresponde a uma aceleração. Sem exceção! Mas o que isso quer dizer?
Sejamos ainda mais explı́citos.
1. Situação em linha reta. Pense num carro acelerando ou frenando (qualquer coisa que altere o módulo da velocidade).
Nesse caso a aceleração é facilmente visualizável pela maioria dos alunos. Nesse caso, temos uma aceleração associada a uma variação do módulo da velocidade e que possui
a mesma direção do vetor velocidade.
2. Situação de curva realizada com velocidade escalar constante (curva realizada com pressão constante no acelerador,
resultando em leitura constante no velocı́metro). Nesse
caso temos aceleração associada à variação de direção do
vetor velocidade. Essa aceleração é perpendicular ao vetor
velocidade (veremos mais a respeito no estudo do movimento circular uniforme)
3. Bola que ricocheteia horizontalmente contra uma parede
e retorna com o mesmo módulo da velocidade, mas tem
seu sentido de movimento alterado. Nesse caso, não temos
mudança de módulo ou de direção, mas ainda assim temos
uma aceleração associada à mudança de sentido do vetor
velocidade.
Mas por que essa discussão é importante? Para responder
façamos outra leitura da primeira Lei de Newton: A velocidade
de um objeto, vetorialmente falando, não muda “de graça”. Se
há variação do vetor velocidade (seja de módulo, de direção ou
Página | 9
10
FÍSICA CAPÍTULO 3
apenas mudança de sentido) há aceleração e se há aceleração
há também a presença de uma força resultante que perdura
enquanto houver mudança do vetor velocidade.
Essa é a importância. Não enxergar de maneira plena a
relação entre velocidade e aceleração pode comprometer seu entendimento sobre as leis de Newton. Mas agora você já sabe! Se
o objeto está acelerado, ele não está em equilı́brio e, portanto,
há uma força resultante não nula atuando sobre ele (somente
enquanto o objeto estiver acelerado).
Há ainda alguns comentários importantes a serem feitos
sobre a primeira lei de Newton. A primeira lei trata sobre estados de equilı́brio (não acelerados – força resultante nula). O
repouso é apenas uma forma de equilı́brio (também chamado de
equilı́brio estático). Um objeto que se mova com rapidez constante numa trajetória retilı́nea também se encontra em equilı́brio.
O equilı́brio, do ponto de vista da mecânica, é um estado em que
não ocorrem mudanças no estado de movimento do objeto. Uma
bola de boliche rolando com rapidez constante numa trajetória
retilı́nea também está em equilı́brio (equilı́brio dinâmico) – até
que bata nos pinos.
A forma vetorial da resultante nula é dada pela Equação 1
enquanto que as formas escalares são mostradas na Equação 2.
X
F~ = 0
(1)
(partı́cula em equilı́brio,forma vetorial)
X
Fx = 0;
X
Fy = 0;
X
Fz = 0
(2)
(partı́cula em equilı́brio, forma de componentes)
Outro ponto importante da primeira lei de Newton. Um
objeto sob a influência de uma única força jamais pode estar
em equilı́brio. A força resultante não poderia ser nula. Apenas
quando duas ou mais forças atuam é que pode haver equilı́brio.
Podemos testar se algo está ou não em equilı́brio observando se
ocorrem ou não alterações em no estado de movimento do corpo.
Página | 10
11
FÍSICA CAPÍTULO 3
IMPORTANTE!
Uma força resultante nula sobre um objeto não
significa que ele esteja necessariamente em repouso, e sim que seu estado de movimento
mantém-se inalterado. Ele pode estar tanto em
repouso quanto em movimento uniforme em linha reta.
3.6
Segunda lei de Newton
De acordo com a primeira lei de Newton, quando um corpo
sofre uma força resultante nula, ele se move com velocidade constante e aceleração zero. Mas o que acontece quando a força resultante é diferente de zero? Sobre um disco em movimento na
Figura 1 com atrito desprezı́vel, aplicamos uma força horizontal
constante na mesma direção e sentido em que ele se move. Logo,
P
F é constante e se desloca na mesma direção horizontal de v.
Descobrimos que enquanto a força está atuando, a velocidade do
disco varia a uma taxa constante. A velocidade escalar do disco
aumenta, de modo que a aceleração a está na mesma direção
P
de v e F~ (YOUNG. H. D; FREEDMAN. Fı́sica 1-Sears & Zemansky. Mecânica. 12a . Edição. Ed. Pearson.). Concluı́mos que
uma força resultante não nula que atua sobre um corpo faz com
que o corpo acelere na mesma direção que a força resultante. O
vetor força resultante é igual ao produto da massa pela aceleração
do corpo. Esta é uma das formulações da 2a Lei de Newton.
X
F~ = m~a
(3)
(Segunda Lei de Newton, Forma Vetorial)
Normalmente usaremos essa relação na forma de componentes:
X
X
X
Fx = max
Fy = may
Fz = maz
(4)
Página | 11
12
FÍSICA CAPÍTULO 3
(segunda lei de Newton, forma de componentes)
A aceleração de um corpo submetido à ação de um conjunto de forças é diretamente proporcional à soma vetorial das
forças que atuam sobre o corpo (a força resultante) e inversamente proporcional à massa do corpo. Esta é outra formulação
da segunda lei de Newton. Como na primeira lei, a segunda lei
de Newton vale apenas em sistemas de referência inerciais. A
unidade de força é definida em termos das unidades de massa e
de aceleração. Em unidades SI, a unidade de força denomina-se
Newton (N), sendo igual a 1 Kg.m/s2 . Discutiremos um pouco
mais sobre a segunda lei tratando do princı́pio da superposição
de forças.
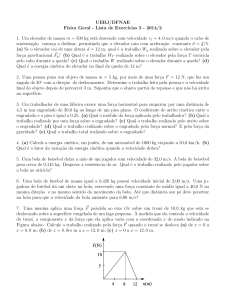
Figura 2: Massa, aceleração e a segunda lei de Newton.
3.6.1
Princı́pio da superposição das forças
Quando você joga uma bola, pelo menos duas forças agem
sobre ela: o empurrão da sua mão e o puxão para baixo da gravidade. Experiências comprovam que, quando duas forças F~1 e
F~2 atuam simultaneamente em um ponto A de um corpo (Figura
3), o efeito sobre o movimento do corpo é o mesmo que o efeito
produzido por uma única força R dada pela soma vetorial
das duas forças F~1 e F~2 .. Generalizando, o efeito sobre o movimento de um corpo produzido por um número qualquer de forças
é o mesmo efeito produzido por uma força única igual à soma vetorial de todas as forças. Esse resultado importante denomina-se
princı́pio da Superposição das Forças. (YOUNG. H. D; FREEDPágina | 12
13
FÍSICA CAPÍTULO 3
MAN. Fı́sica 1-Sears & Zemansky. Mecânica. 12a . Edição. Ed.
Pearson.)
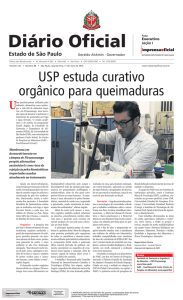
Figura 3: Duas forças F~1 e F~2 que atuam sobre um ponto A
exercem o mesmo efeito que uma força R dada pela soma vetorial.
Em problemas de mecânica, só entendemos (e em muitos
casos, só resolvemos) os problemas se tratamos as forças pelo o
que elas são. Entes vetoriais! Normalmente precisamos determinar o vetor soma (resultante) de todas as forças que atuam
sobre um corpo. Chamaremos essa soma de força resultante
que atua sobre um corpo.
~ =
R
N
X
F~i
i=1
3.7
Relação entre força e aceleração
1. Uma força resultante que atua sobre um corpo faz com que
o corpo acelere na mesma direção da força e sentido da
força.
2. Se o módulo da força resultante for constante a aceleração
produzida sobre o corpo também será.
3. Quanto maior a força resultante aplicada sobre o corpo
maior a aceleração produzida.
Página | 13
14
FÍSICA CAPÍTULO 3
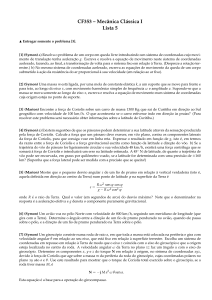
Figura 4: Achando as componentes do vetor soma (resultante)
R de duas forças F~1 e F~2 .
4. Corpos de massas distintas adquirem acelerações distintas
quando submetidos à mesma força resultante.
5. Quanto mais massivo for o corpo menor a aceleração produzida para uma mesma força resultante.
Segunda Lei de Newton na Engenharia
Figura 5: O projeto de uma motocicleta de alto desempenho
depende fundamentalmente da segunda lei de Newton. Para maximizar a aceleração, o projetista deve fazer a motocicleta ser
mais leve possı́vel (isto é, minimizar sua massa) e usar o motor
mais potente possı́vel (isto é, maximizar a força motriz).
Página | 14
15
FÍSICA CAPÍTULO 3
IMPORTANTE!
Todo corpo que não está em equilı́brio sob a
ação de uma ou mais forças está acelerado,
e a recı́proca é verdadeira. Se o corpo está
acelerado é porque há uma força resultante
não nula atuando sobre ele.
IMPORTANTE!
A segunda lei de Newton refere-se a forças
externas. A segunda lei de Newton é válida
somente em sistemas de referenciais inerciais,
assim como é também para a primeira lei de
Newton.
3.8
Terceira lei de Newton
Das três leis de Newton, a 3a Lei talvez seja a mais
conhecida pelos estudantes e pelo grande público, embora
com alguns equı́vocos, em geral. Nesse sentido é importante
termos claro o que é e o que não é a 3a Lei de Newton.
Uma das maneiras menos formais e talvez mais poéticas de
se enunciar essa lei seria: “É impossı́vel tocar sem ser tocado”. Com isso queremos dizer que o ato de tocar traz uma
consequência intrı́nseca. Você toca em algo ou em alguém
e necessariamente é tocado de volta no com o contato fı́sico
com o objeto ou pessoa. Outra maneira interessante de colocar a 3a Lei: “Forças acontecem aos pares!”, uma vez que
é impossı́vel haver uma ação sem reação. Já sabemos que a
reação não é nem mais intensa e nem menos intensa que a
ação. Outro ponto importantı́ssimo: A ação se dá num
Página | 15
16
FÍSICA CAPÍTULO 3
corpo e a reação se dá em outro corpo. Se você estiver
analisando um par de forças atuando sobre o mesmo corpo
pode afirmar com certeza que não é um par de ação e reação.
Vamos agora estabelecer de forma mais precisa a terceira lei
por meio de alguns enunciados equivalentes.
Enunciados
“Quando um corpo A exerce uma força sobre um corpo
B (uma ‘ação’), então o corpo B exerce uma força sobre o
corpo A (uma ‘reação’). Essas duas forças possuem mesmo
módulo e mesma direção, porém são orientadas em sentidos
contrários. Essas duas forças atuam em corpos diferentes.”
“Quando dois corpos interagem, as forças que cada
força exerce sobre o outro são sempre iguais em módulo e
possuem sentidos contrários.”
Figura 6: Identificação das forças em ação, quando uma mão
puxa uma corda amarrada a um bloco. a) Mão, corda e bloco. b)
Pares de ação e reação. (As forças verticais não são mostradas).
Página | 16
17
FÍSICA CAPÍTULO 3
Figura 7: Não são pares de ação e reação. a) Essas forças não
são um par de ação e reação por que atuam no mesmo corpo. b)
Essas forças serão iguais somente se a corda estiver em equilı́brio
ou se sua massa for desprezada. (As forças verticais não são
mostradas).
3.9
Diagrama de corpo livre
O que é um diagrama de corpo livre? Podemos encarar como uma parte (fundamental) de um procedimento
padrão para resolver diversos problemas de mecânica.
Consiste num esquema ou representação do objeto de estudo livre de sua “vizinhança”, contendo, além do objeto ou
corpo, as forças (representadas por vetores) que atuam sobre ele. Vamos tentar sistematizá-lo através de perguntas e
respostas.
1) Qual o primeiro passo?
R: Seria desenhar uma figura, um esboço da situação que
será estudada, contendo o objeto ou sistema fı́sico que será
estudado e a representação geométrica (vetores indicados por
setas) de todas as forças que atuam sobre o corpo. No primeiro passo, você deve entender e responder por meio desse
recurso gráfico a seguinte pergunta: O que eu estou estudando? Em linguagem de fı́sico, dizemos que ao responder a
essa pergunta você está delimitando o objeto de estudo.
Muitas vezes, para poupar tempo, representamos o objeto
Página | 17
18
FÍSICA CAPÍTULO 3
estudado por um ponto e colocamos sobre o mesmo a representação geométrica de todas as forças que atuam sobre o
objeto.
Figura 8: A figura acima representa: a) um esboço da situação a
ser estudada. b) as forças atuantes no corpo A. c) a força atuante
no corpo B.
2) Qual o próximo passo?
R: Representar todas as forças que atuam sobre o objeto.
Ou seja: Não deixe força de fora (das que atuam sobre o objeto); não coloque forças que o objeto exerce na vizinhança.
Após a representação de todas as forças que atuam sobre o
objeto, em geral é necessário escolher um sistema de coordenadas para decompor as forças (se todas as forças
estiverem contidas em uma única direção, ou seja, se o problema for unidimensional, basta estabelecer o sentido posiPágina | 18
19
FÍSICA CAPÍTULO 3
tivo do eixo).
Figura 9: a) Uma caixa sobe um plano inclinado, puxada por
uma corda . (b) As três forças que agem cobre a caixa: a força
da corda T a força gravitacional Fq e a força normal FN . (c) As
componentes de Fq na direção ao plano inclinado e na direção
perpendicular.
Página | 19
20
FÍSICA CAPÍTULO 3
IMPORTANTE!
Não se deve confundir a representação das
forças que atuam sobre o objeto com as componentes das forças que atuam sobre o objeto. As componentes já implicam em uma
escolha de sistema de coordenadas especı́fica.
3) Após escolher o sistema de coordenadas que usaremos para
decompor as forças, prosseguimos na resolução do problema
encontrando a força resultante para cada eixo do sistema de
coordenadas. Para isso fazemos a somatória de forças para
cada eixo, ou seja, encontramos as componentes do vetor
força resultante. Em geral, podemos afirmar que problemas
de dinâmica necessitam de procedimentos de soma vetorial.
Observação 1: Se for um problema de estática, temos que a
força resultante sobre o sistema é nula. Nesse caso vamos trabalhar com um sistema de equações em que cada componente
da força resultante é igual à zero. Observação 2: Ao longo da
resolução dos problemas vamos ganhando experiência na escolha de eixos coordenados de modo a simplificar a resolução
do problema.
4) Tendo as componentes do vetor força resultante, temos todos os elementos para prosseguir até o final da resolução do problema.
5) Após chegar ao final da resolução do problema, você
como engenheiro, vai analisar a validade da solução encontrada. Para isso, faça uma análise dimensional da resposta;
análise situações limites¸ e veja se o a resposta fornece resultado fisicamente aceitáveis ou se fornece resultados absurdos.
Uma vez que entendemos o passo a passo do diagrama
de corpo livre, podemos resumi-lo. Diagrama de corpo livre
Página | 20
21
FÍSICA CAPÍTULO 3
é uma representação (esboço ou figura) do problema a ser estudado em que você define o objeto (corpo ou sistema fı́sico)
que você vai estudar e nele você representa todas as forças
que atuam sobre o próprio. Atenção! Você deve colocar no
diagrama as forças que atuam sobre o corpo, e não as forças
que o corpo exerce sobre a sua vizinhança.
Principais pontos do capı́tulo:
• Um sistema de referência para o qual a primeira e segunda leis de Newton são validas denomina-se Sistema
de Referencial Inercial.
• Quando um corpo está inicialmente em repouso, ele
permanece em repouso, se a soma vetorial das forças
que atuam sobre ele for igual a zero. O mesmo é válido
para um corpo inicialmente em movimento desenvolvendo uma trajetória retilı́nea e velocidade constante.
• A aceleração de um corpo sujeito a ação de diversas
forças é diretamente proporcional a a força resultante
das forças que agem sobre ele e inversamente proporcional a sua massa.
• Quando dois corpos interagem a força que um exerce
sobre o outro é igual em módulo e direção e oposta em
sentido. Portanto, um par de ação e reação nunca atua
sobre o mesmo corpo.
Página | 21
22
FÍSICA CAPÍTULO 3
PERGUNTAS CONCEITUAIS:
1. (SEARS & ZEMANSKY, 12a Ed) Pode um corpo
permanecer em equilı́brio quando somente uma força
atua sobre ele? Explique.
2. (SEARS & ZEMANSKY, 12a Ed) Uma bola lançada
verticalmente de baixo para cima possui velocidade nula
em seu ponto mais elevado. A bola está em equilı́brio
nesse ponto? Por que sim ou porque não?
3. (SEARS & ZEMANSKY, 12a Ed) Quando um
carro para repentinamente os passageiros tendem a se
mover para frente em relação aos seus assentos. Quando
um carro faz uma curva abrupta para um lado os passageiros tendem a escorregar para um lado do carro.
Por quê?
4. (SEARS & ZEMANSKY, 12a Ed) Algumas pessoas dizem que , quando um carro para repentinamente,
os passageiros são empurrados para frente por uma
‘força de inércia’ (ou ‘força de momento linear’). O
que existe de errado nessa explicação?
5. (SEARS & ZEMANSKY, 12a Ed) Por que o chute
em uma rocha grande pode machucar mais o seu pé do
que o chute em uma rocha pequena? A rocha grande
deve sempre machucar mais? Explique
6. (SEARS & ZEMANSKY, 12a Ed) Por que motivo
de segurança um carro é projetado para sofrer esmagamento na frente e na traseira? Por que não para colisões
laterais e capotagens?
7. (SEARS & ZEMANSKY, 12a Ed) Quando um
peso grande é suspenso por um fio no limite de sua
elasticidade, puxando-se o fio suavemente o peso pode
Página | 22
23
FÍSICA CAPÍTULO 3
ser levantado; porém, se você puxar bruscamente, o fio
se rompe. Explique isso usando as Leis de Newton para
o movimento.
8. (SEARS & ZEMANSKY, 12a Ed) Um cavalo puxa
uma carroça. Uma vez que a carroça puxa o cavalo para
trás com uma força igual e contrária à força exercida
pelo cavalo sobre a carroça, por que a carroça não permanece em equilı́brio, independentemente da força que
o cavalo imprime na carroça?
9. (SEARS & ZEMANSKY, 12a Ed) Em um cabode-guerra duas pessoas puxam as extremidades de uma
corda em sentidos opostos. Pela terceira Lei de Newton, a força que A exerce em B tem módulo igual à
força que B exerce em A.O que determina quem é o
vencedor?(Dica desenhe um diagrama de corpo livre
para cada pessoa)
10. (SEARS & ZEMANSKY, 12a Ed) Você amarra
um tijolo na extremidade de uma corda e o faz girar
em torno de você em um cı́rculo horizontal. Descreva a
trajetória do tijolo quando você larga repentinamente
a corda usando diagrama de corpo livre.
11. (CUTNELL & JOHNSON, 6a Ed) Uma casinha
para alimentar pássaros possui grande massa e está
pendurada em um galho de árvore, como mostrado no
desenho. Um fio preso ao fundo da casinha foi deixado
solto e fica balançando. Uma criança fica curiosa com
o fio balançando e puxa o fio tentando ver o que existe
Página | 23
24
FÍSICA CAPÍTULO 3
dentro da casinha. O fio que fica balançando foi cortado
do mesmo carretel do que prende a casinha ao galho.
É mais provável que o fio entre a casinha e o galho arrebente com um puxão contı́nuo e lento , ou com um
puxão repentino para baixo. Apresente seu raciocı́nio.
12. (CUTNELL & JOHNSON, 6a Ed) A força externa
resultante que age sobre um objeto é nula. É possı́vel
que o objeto esteja viajando com uma velocidade que
não seja nula? Se a resposta é sim, diga se há condições
que devam ser impostas ao módulo, direção e sentido
do vetor velocidade. Se a sua resposta for não, forneça
uma explicação para ela.
13. (CUTNELL & JOHNSON, 6a Ed) Um pai e sua
filha de sete anos de idade estão frente a frente em cima
de patins de gelo. Com suas mãos, eles se empurram
de modo a se afastarem. (a) Comparem os módulos
das forças que eles experimentam. (b) Qual deles, em
caso positivo, sente a maior aceleração? Justifique sua
resposta.
Página | 24
25
FÍSICA CAPÍTULO 3
REFERÊNCIAS BIBLIOGRÁFICAS
• CUTNELL. J. D; JOHSON, K. W. Fı́sica. Volume 1.
Sexta Edição. Ed. LTC.
• DOCA, R. H.; BISCUOLA, G. J.; BÔAS, N. V. Tópicos
de Fı́sica 1: MECÂNICA. 18a Ed. São Paulo: Saraiva,
2001.
• FEYNMAN, R.P., LEIGHTON, R.B., SANDS, M., Lectures on Physics. v. 1, New York: Addison-Wesley
Publishing Company, 1963.
• HALLIDAY, D.; RESNICK, R., Fı́sica. v. 1, 4a ed.
Rio de Janeiro: LTC Ltda, 1992.
• HEWITT, P. G. Fı́sica Conceitual. trad. Trieste Freire
Ricci e Maria Helena Gravina. 9a ed. Porto Alegre:
Bookman, 2002.
• MARK, R.; Cálculo para Leigos. 2a Edição. Rio de
Janeiro : Alta Books 2012.
• NUSSENZVEIG, H.M., Curso de Fı́sica Básica, v. 1,
São Paulo: Edgar Blücher LTDA, 1987.
• PAUL, A.T; GENE. M; Fı́sica para Cientistas e Engenheiros. Volume 1 Rio de Janeiro: LTC 2012
• WALKER, J. Fundamentos de Fı́sica-Hlalliday-Resnick.
Volume 1 8a . Edição. Rio de Janeiro: LTC Ltda, 1993.
• YOUNG. H. D; FREEDMAN. Fı́sica 1-Sears & Zemansky. Mecânica. 12a . Edição. Ed. Pearson.
Página | 25