- IME-USP")
Sistemas para Automação e
Robótica (parte 02)
Anatomia dos Braços Mecânicos Industriais
• Configuração dos robôs
–
–
–
–
–
–
Um braço mecânico é formado pela base, braço e punho.
O braço (elo) e ligado a base e esta e fixada ao chão (parede).
O braço (elo) que efetua os movimentos e posiciona o punho.
O punho é dotado de movimentos destinados a orientar (apontar) o órgão terminal.
A movimentação do braço (elo) e a orientação do punho são realizadas por juntas, que são
articulações providas de sistemas de acionamento.
A base sustenta o corpo, que movimenta o braço, que posiciona o punho que orienta o
órgão terminal, que executa a ação.
Configuração dos robôs
•Nomenclatura para os manipuladores é baseado nos tipos de juntas utilizadas na cadeia de
elos.
•Manipulador TRR: primeira junta (da base) torcional, e as duas seguintes seriam rotacionais.
•O punho segue a mesma notação.
Configuração dos robôs
• Configurações típicas para o braço e o punho de robôs
industriais
Configuração dos robôs
Configuração dos robôs
•Robô Cartesiano:
– Usa três juntas lineares. É o robô de configuração mais simples.
Ele desloca as três juntas uma em relação a outra.
Configuração dos robôs
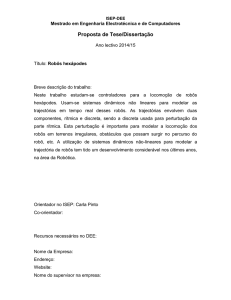
•Robô Cilíndrico:
– Ele possui na base uma junta linear (L), sobre a qual apóia-se uma
junta rotativa (revolvente (V) ou torcional) . Uma terceira junta linear
(L) é conectada na junta rotativa formando uma configuração LVL
V
L
L
Configuração dos robôs
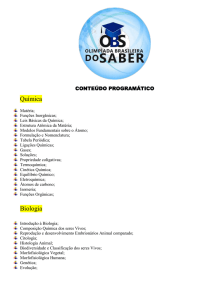
•Robô Scara:
–Ele possui duas juntas rotativas e uma junta linear
V
R
L
Punho
• Movimentos do Punho
– Os movimentos do punho possuem nomenclatura
específica
Configuração de punhos
•Punho RT
R
T
Configuração de punhos
– Punho TRT
R
T
T
Órgão Terminal
•É usado para descrever a mão ou ferramenta que esta conectada ao
pulso, como por exemplo, uma pistola de solda, garras, pulverizadores
de tintas, entre outros.
•Alguns órgãos terminais são dotados de sensores que fornecem
informações sobre os objetos.
•Os órgãos terminais mais comuns utilizados pelos robôs são:
–Garras de 2 ou mais dedos
–Ventosas de sucção
–Imas ou eletroímãs
–Ganchos
–Colheres
Órgão Terminal
•Garra de dois dedos
– Modelo simples e com movimentos paralelos ou rotacionais.
– Proporciona pouca versatilidade na manipulação dos objetos,
pois existe limitação na abertura dos dedos. A dimensão dos
objetos não pode exceder esta abertura.
Órgão Terminal
•Garra para objetos cilíndricos
• consiste de dois dedos com semicírculos, os quais permitem
segurar objetos cilíndricos de diversos diâmetros diferentes.
Órgão Terminal
•Garra articulada
– A garra articulada tem a forma mais similar a mão humana, a qual
proporciona uma versatilidade considerável para manipular objetos
de formas irregulares e tamanhos diferentes.
– Esta característica esta relacionada com a quantidade de elos.
Órgão Terminal
• Além das garras, ventosas e ganchos, algumas aplicações
exigem ferramentas especificas, entre as quais citam-se:
•Ferramenta para solda a ponto
•Ferramenta para solda a arco
•Pistola de pintura
•Dispositivos para furação ou rosqueamento
•Ferramentas especiais
Sistema de Acionamento (atuadores)
• Acionadores são dispositivos responsáveis pelo movimento das
articulações (juntas) e do desempenho dinâmico do robô.
– Elétricos
•
•
Exemplo: Motor de corrente contínua.
Motor é um dispositivo que produz movimento de rotação baseado na circulação
de uma corrente elétrica sob um campo magnético que produz uma força
contraeletromotriz induzida
Campo magnético
Força contra-eletromotriz induzida
Sistema de Acionamento (atuadores)
• Acionadores Hidráulicos
•
•
•
•
•
Utilização de óleo
Principais componentes : motor, cilindro, bomba de óleo, válvula e tanque de óleo.
Motor: responsável pelo fluxo de óleo no cilindro em direção ao pistão que
movimenta a junta.
É geralmente associado a robôs de maior porte, quando comparados aos
acionadores pneumáticos e elétricos.
A precisão em relação aos acionadores elétricos é menor.
• Acionadores Pneumáticos
•
São semelhantes aos acionadores hidráulicos, porém a diferença é a utilização de ar
ao invés de óleo
https://www.youtube.com/watch?v=CTJZJerzZPY
https://www.youtube.com/watch?v=wURRENFrYks
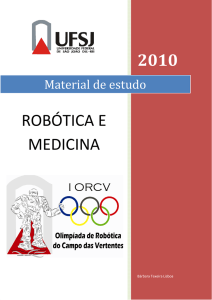
Sistema de Acionamento (atuadores)
Observando o gráfico compare a relação custo X capacidade de carga entre um
acionador elétrico e um hidráulico
 - IME-USP")