Capítulo III – Comando e Proteção de Motores de Indução Trifásicos
3.1. Contatores
O princípio de funcionamento do contator foi apresentado no capítulo I (seção 1.4). Ele é um
dispositivo largamente utilizado no acionamento de motores de indução trifásicos. Os contatores
podem ser divididos em dois tipos: contatores principais (de força) e contatores auxiliares.
Os contatores de força possuem três contatos principais NA (normalmente abertos) que
servem para manobrar cargas trifásicas com correntes de até algumas centenas de Ampères.
Também possuem contatos auxiliares normalmente abertos (NA) e normalmente fechados (NF) de
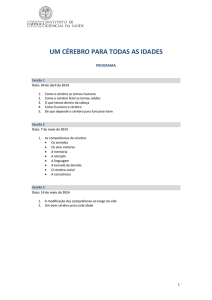
baixa corrente, até 10 A, para comando e sinalização dos circuitos. A figura 3.1 apresenta o
diagrama esquemático de um contator de força.
A1
A2
L1 L2 L3
1 3 5 13 21
2 4 6 14 22
T1 T2 T3
Figura 3.1 – Diagrama esquemático do contator de força
Os terminais da bobina são designados por A1 e A2. Geralmente as bobinas são projetadas
para alimentação com corrente alternada para as seguintes tensões eficazes: 12 V, 24 V, 110 V,
127V, 220 V, 380 V e 440 V. Quando a tensão da bobina é diferente da tensão de rede deve-se
utilizar um transformador de comando. As bobinas projetadas para corrente contínua são
encontradas nas seguintes tensões: 12 V, 24 V, 48 V, 125 V e 220 V.
Os terminais dos contatos principais são 1 (L1), 3 (L2) e 5 (L3), que são conectados na rede
trifásica, e 2 (T1), 4 (T2) e 6 (T3), que são conectados na carga. Os terminais dos contatos
auxiliares são 13, 14, 21 e 22. O primeiro algarismo indica a posição relativa dos contatos e o
segundo algarismo indica se o contato é NA (3 e 4) ou NF (1 e 2). O número de contatos auxiliares
é variável. Geralmente é possível encaixar blocos de contatos auxiliar no contator principal.
Os contatores auxiliares (figura 3.2) possuem somente contatos auxiliares e são utilizados
para funções de comando e sinalização.
A1
13 23 33 43 51 61
A2
14 24 34 44 52 62
Figura 3.2 – Diagrama esquemático do contator auxiliar
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
69
3.2. Elementos de Proteção
Os dispositivos de proteção mais comuns para motores de indução trifásicos são o Relé
Bimetálico de Sobrecarga e o Fusível.
O princípio de funcionamento do relé bimetálico de sobrecarga (ou relé térmico) foi
apresentado no capítulo I (seção 1.4). Ele é um dispositivo muito utilizado na proteção contra
sobrecarga de motores de indução trifásicos. Geralmente estão acoplados mecanicamente ao
contator de força. Na figura 3.3 está apresentado o diagrama esquemático do relé de sobrecarga.
1
3
5
97 95
2
4
6
98 96
Figura 3.3 – Diagrama esquemático do relé bimetálico de sobrecarga
Os elementos bimetálicos estão localizados entre os terminais 1-2, 3-4 e 5-6, por onde
circula a corrente do motor. Quando ocorre a sobrecarga, estes elementos curvam e movimentam
um sistema mecânico que faz os contatos auxiliares 97-98 (NA) e 95-96 (NF) trocarem de estado.
Coloca-se o contato NF em série com a bobina do contator para que, na ocorrência da sobrecarga, a
alimentação desta bobina seja interrompida e o motor seja desligado. O contato 97-98 pode ser
usado para ligar uma lâmpada de sinalização (sinaleiro) que avisa sobre a ocorrência da sobrecarga.
Os fusíveis utilizados na proteção do circuito de motores são o Diazed (ou D) e o NH. Estes
fusíveis foram apresentados no capítulo I (seção 1.4). Os fusíveis são utilizados nas fases do
circuito de potência de motores e no circuito de comando das bobinas dos contatores.
R S T
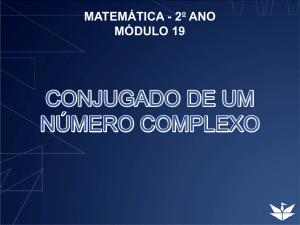
A figura 3.4 apresenta o circuito de potência de um
motor com todos os dispositivos típicos.
S1
Dispositivo de seccionamento (S1): é a chave
seccionadora (seção 1.4) que tem por função
interromper o circuito para fins de manutenção. Ela é
operada com o motor desligado.
Dispositivo de proteção contra curto-circuito: é
composto pelos fusíveis (F0) que protegem o
alimentador contra curto-circuito.
Dispositivo de manobra: é o contator (K1) que serve
para ligar e desligar o motor.
Dispositivo de proteção contra sobrecarga: é o relé
bimetálico de sobrecarga (RS1) que protege os
enrolamentos do motor contra sobrecarga.
F0
K1
RS1
M
Figura 3.4 – Circuito de potência
Eletricidade Industrial
70
3.3. Elementos de comando
Os elementos de comando são os dispositivos utilizados para comandar a alimentação das
bobinas dos contatores. Portanto, eles não são percorridos diretamente pelas correntes dos motores.
Há muitos dispositivos de comando, alguns deles são descritos a seguir.
3.3.1. Botoeiras (Botões Pulsadores)
A botoeira é um elemento de comando bastante simples. Basicamente, ela é composta por
um contato NA, ou um NF, ou ambos, e o estado destes contatos é alterado por ação manual.
Porém, quando cessa a ação manual os contatos voltam ao estado inicial devido a uma mola de
retorno. A figura 3.5 mostra a forma construtiva (a) e o símbolo (b) de uma botoeira com um
contato NF e um NA.
Ação
manual
Mola de
retorno
NF NA
(contatos)
(a)
(b)
Figura 3.5 – Botoeira: forma construtiva (a) e símbolo (b)
Exemplo 3.1 – Chave partida direta / Contato de selo ou retenção.
A figura 3.6 apresenta o circuito de potência (a) e o circuito de comando (b) da chamada
“Chave partida direta”.
F1
R S T
F
S1
RS1
F0
B0
K1
B1
K1
RS1
K1
M
N
(a)
(b)
Figura 3.6 – Chave partida direta: circuito de potência (a) e circuito de comando (b)
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
71
O contator conecta os terminais do motor diretamente na rede trifásica e duas botoeiras são
as responsáveis por ligá-lo (B1) e desligá-lo (B0). O contato auxiliar NA de K1 está em paralelo
com o botão liga. Este contato é chamado de selo ou retenção porque quando a ação manual na
botoeira B1 cessa, a bobina de K1 continua sendo alimentada por este contato. Quando a botoeira
B0 é pressionada, ela corta a alimentação da bobina transitoriamente fazendo o contato auxiliar
abrir e o motor é desligado.
Exemplo 3.2 – Chave partida direta reversora / Intertravamento.
A figura 3.7 apresenta o circuito de potência (a) e o circuito de comando (b) da chamada
“Chave partida direta reversora”. Se o motor for acionado pelo contator K1, a seqüência de fases
aplicada aos terminais T1, T2 e T3 do motor é RST. Se o motor for acionado pelo contator K2, a
seqüência de fases aplicada aos terminais T1, T2 e T3 do motor é RTS. Esta troca na seqüência de
fases produz inversão do sentido de rotação do motor de indução trifásico.
R
S T
F1
F
S1
B0
F0
RS1
K1
RS2
K2
B1
RS1
B2
K1
K2
RS2
M
B2
B1
K2
K1
K1
K2
N
(a)
(b)
Figura 3.7 – Chave partida direta reversora: circuito de potência (a) e circuito de comando (b)
Se, por algum problema, os contatores forem acionados simultaneamente ocorrerá curtocircuito entre as fases S e T. Para evitar este problema, no circuito de comando existe um
intertravamento entre os contatores que impede que eles atuem simultaneamente. Observe-se que o
contato NF de um contator está em série com a bobina de outro contator, assim, elas não podem ser
acionadas juntas. Com a disposição usada para as botoeiras o sentido de rotação pode ser invertido
em plena marcha. Pressionando-se o botão B1, a bobina do contator K1 atraca e o motor parte em
um dado sentido, por exemplo, horário. O contato de selo mantém o contator K1 acionado mesmo
após cessar a pressão manual no botão B1. Quando o botão B2 é pressionado, a alimentação de K1
é cortada instantaneamente, porque o contato NF de B2 está em série com a bobina de K1. Por outro
lado, o contato NA de B2 fecha e a bobina de K2 é alimentada, fazendo o motor inverter o sentido
Eletricidade Industrial
72
de rotação. O contato de selo mantém o contator K2 acionado mesmo após cessar a pressão manual
no botão B2.
3.3.2. Chave fim de curso
A chave fim de curso é um tipo de chave que é acionada pelo esbarro de um corpo como,
por exemplo, um portão, um caixote, a haste de um cilindro hidráulico ou pneumático, etc. Há
chaves fim de curso com variados formatos. A figura 3.8 apresenta chaves fim de curso que
possuem roletes que são pressionados por uma grade e trocam os estados dos contatos NA e NF.
Quando a pressão externa cessa, uma mola faz os contatos retornarem as posições iniciais. O
número de contatos NA e NF é variável conforme o modelo da chave.
(a)
(b)
Figura 3.8 – Chave fim de curso: esquema físico (a) e símbolo (b)
3.3.3. Ampola de Mercúrio
O mercúrio é um elemento condutor de corrente elétrica que se encontra no estado líquido à
temperatura ambiente. Colocando-se uma quantidade de mercúrio em uma ampola com eletrodos
internos se obtém uma chave cujos contatos estarão abertos ou fechados dependendo da posição da
ampola. Na figura 3.9(a) a ampola está na posição horizontal e os contatos estão fechados. Na
figura 3.9(b) a ampola está na posição vertical e os contatos estão abertos.
(a)
(b)
Figura 3.9 – Ampola de mercúrio: contatos fechados (a) e abertos (b)
Exemplo 3.3 - Controle automático de nível.
A ampola de mercúrio é utilizada no interior de uma bóia que controla níveis de caixas de
água (chave bóia). São utilizadas duas chaves bóia, uma no reservatório superior e outra no
reservatório inferior. As ampolas de mercúrio estão posicionadas de forma diferente nestas bóias. A
figura 3.10 apresenta a caixa superior para em duas situações: na figura 3.10(a) a caixa está vazia e
os contatos da chave bóia estão fechados (bomba ligada); na figura 3.10(b) a caixa está cheia e os
contatos da chave bóia estão abertos (bomba desligada).
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
73
(a)
(b)
Figura 3.10 – Reservatório superior: vazio (a) e cheio (b)
A figura 3.11 apresenta a caixa inferior para em duas situações: na figura 3.11(a) a caixa está
vazia e os contatos da chave bóia estão abertos (bomba desligada); na figura 3.11(b) a caixa está
cheia e os contatos da chave bóia estão fechados (bomba ligada).
(a)
(b)
Figura 3.11 – Reservatório inferior: vazio (a) e cheio (b)
Se a bomba é monofásica, as chaves bóias só podem estar ligadas diretamente no motor para
potências muito baixas (menores do que 3/4 cv). Para bombas trifásicas, as chaves bóias comandam
a bobina do contator.
A figura 3.12 apresenta o circuito de potência (a) e o circuito de comando (b) de uma chave
de controle de nível com contator e chaves bóias.
F1
R S T
F
RS1
S1
F0
S0
1
2
3
K1
BSUP
RS1
BINF
K1
M
N
(a)
(b)
Figura 3.12 – Controle automático de nível para dois reservatórios
Eletricidade Industrial
74
O circuito de comando permite tanto o funcionamento automático da bomba como a
operação de comando manual direto, dependendo da posição da chave seletora S0:
na posição 1 o comando é automático, através das chaves bóias;
na posição 2 o motor permanece sempre desligado;
na posição 3 o motor permanece sempre ligado.
O comando automático funciona da forma descrita a seguir. Com os dois reservatórios
vazios, as chaves bóias apresentam-se nas posições indicadas na figura 3.12, ou seja, BINF está
aberta e BSUP está fechada. Como não existe água no reservatório inferior a bomba não pode ser
ligada. À medida que a água do alimentador vai entrando no reservatório inferior, a chave bóia
inferior vai subindo. No momento em que o reservatório inferior atinge o nível máximo B INF fecha
os seus contatos ligando a bomba. O nível do reservatório superior começa a subir e, quando atinge
seu nível máximo, a chave bóia BSUP abre os seus contatos e desliga a bomba.
3.3.4. Relés de tempo
Os relés de tempo tradicionais são temporizadores eletrônicos para controle de tempos de
curta duração, tipicamente menores do que um minuto. Eles são divididos em três tipos:
relé de tempo com retardo na energização;
relé de tempo com retardo na desenergização;
relé de tempo estrela-triângulo.
a) Relé de tempo com retardo na energização
A figura 3.13 apresenta o diagrama esquemático de um relé de tempo com retardo na
energização: os terminais A1 e A2 são para alimentação do circuito eletrônico do relé; há um
contato reversor 15-16 (NF) e 15-18 (NA).
A1
15
A2
18
RTE
16
Figura 3.13 - Relé de tempo com retardo na energização
O diagrama de operação da figura 3.14 mostra o funcionamento do relé. No instante t1 o
circuito eletrônico do relé (A1 e A2) é alimentado, porém, os seus contatos permanecem ainda no
mesmo estado. Somente depois de transcorrido o tempo T ajustado, ou seja, em t2, os contatos
trocam de estado. Os contatos voltam à posição inicial no momento em que a alimentação em A1 e
A2 cessa, ou seja, no instante t3.
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
75
Alimentação em A1 e A2
Comutação dos contatos 15, 16 e 18
t1
T
t2
t3
Figura 3.14 – Diagrama de operação do relé de tempo com retardo na energização
b) Relé de tempo com retardo na desenergização
A figura 3.15 apresenta o diagrama esquemático de um relé de tempo com retardo na
desenergização: os terminais A1 e A2 são para alimentação do circuito eletrônico do relé; há um
contato reversor 15-16 (NF) e 15-18 (NA); os terminais 1 e 2 são ligados a um contato externo para
comandar a desenergização.
1
A1
15
2
A2
18 16
RTD
Figura 3.15 - Relé de tempo com retardo na desenergização
O diagrama de operação da figura 3.16 mostra o funcionamento do relé. No instante t1 o
circuito eletrônico do relé (A1 e A2) é alimentado, mas contato ligado entre 1 e 2 está aberto, assim,
os contatos 15, 16 e 18 permanecem ainda no mesmo estado. No instante t 2 o contato 1-2 externo é
fechado, fazendo com que o contato 15-16 abra e o contato 15-18 feche. No instante t3 o contato
externo 1-2 volta a ser aberto. Somente a partir deste momento é que o tempo T ajustado passa a ser
contado. Transcorrido este tempo, ou seja, no instante t4 o contato 15-16 volta a fechar e o contato
15-18 volta a abrir. Observa-se que o contatos 15, 16 e 18 têm uma ação retardada em relação a
abertura do contato externo 1-2, daí surge a denominação “retardo na desenergização”.
Eletricidade Industrial
76
Alimentação em A1 e A2
fechado
aberto
Posição do contato externo entre 1 e 2
Comutação dos contatos 15, 16 e 18
T
t1
t2
t3
t4
t5
Figura 3.16 – Diagrama de operação do relé de tempo com retardo na desenergização
Exemplo 3.4 – Circuito temporizado na desenergização
Na figura 3.17 os contatores K1 e K2 manobram, respectivamente, o banco de resistores R e
o motor trifásico M de um ventilador. O circuito funciona da seguinte forma: Quando a botoeira S1
é pressionada, a bobina de K1 é alimentada. Os seus contatos principais fecham e ligam o banco de
resistores R. O contato NA de K1 que está em paralelo com S1 faz a retenção e o outro contato NA,
que está ligado aos contatos 1-2 de RTD, fecha. Isto faz com que o contato NA do relé RTD feche e
a bobina de K2 seja alimentada. Os contatos principais de K2 fecham e ligam o motor M. O contato
auxiliar NA de K2 fecha e a Lâmpada L1 sinalizadora de motor ligado acende. Resumindo, o motor
e o banco de resistores são ligados de forma quase simultânea. Mostra-se a seguir que o retardo
(temporização) ocorre no desligamento do motor pela botoeira S2. Quando a botoeira S2 é
pressionada, a alimentação da bobina de K1 é cortada e o banco de resistores é imediatamente
desligado. O contato auxiliar NA de K1 que está ligado aos terminais 1 e 2 do relé abre e o relé
RTD começa a contar o tempo. Transcorrido o tempo ajustado, o contato NA do relé abre e corta a
alimentação da bobina de K2, que faz o motor ser desligado. Portanto, o motor (ventilador) é
desligado T segundos após o banco de resistores com o objetivo de esfriar rapidamente os
resistores. A botoeira S0 desliga simultaneamente os resistores e o ventilador.
F4
F5
S0
K1
K2
S1
K1
RTD
K2
K2
L1
S2
R
M
K1
RTD
K1
Figura 3.17 – Circuito com retardo na desenergização
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
77
b) Relé de tempo Estrela-Triângulo
O relé de tempo estrela-triângulo é um relé projetado para utilização em chaves estrelatriângulo e compensadora. O seu diagrama esquemático está na figura 3.18: os terminais A1 e A2
são para alimentação do circuito eletrônico do relé; há um contato reversor 15-16 (NF) e 15-18
(NA) e outro contato reversor 25-26 (NF) e 25-28 (NA).
A1
15
A2
18
25
RY
16
Y
28
26
Figura 3.18 - Relé de tempo estrela-triângulo
O diagrama de operação da figura 3.19 mostra o funcionamento do relé. No instante t 1 o
circuito eletrônico do relé (A1 e A2) é alimentado, o contato 15-16 abre e o contato 15-18 fecha,
porém, os contatos 25, 26 e 28 permanecem ainda no mesmo estado. Depois de transcorrido o
tempo T1 ajustado, ou seja, em t2 o contato 15-16 fecha e o contato 15-18 abre. No instante t3,
poucos milésimos de segundo após t2, o contato 25-26 abre e o contato 25-28 fecha. O intervalo de
tempo T2, entre t2 e t3, é um tempo morto usado para impedir que os dois conjuntos de contatos
atuem simultaneamente e produzam algum curto-circuito. Todos os contatos voltam à posição
inicial no momento em que a alimentação em A1 e A2 cessa, ou seja, no instante t4.
Alimentação em A1 e A2
T1 (ajustável)
Comutação dos contatos
15, 16 e 18 (Y)
Comutação dos contatos
25, 26 e 28 ()
T2 (fixo, milisegundos)
t1
t2 t3
t4
Figura 3.19 – Diagrama de operação do relé de tempo estrela-triângulo
Eletricidade Industrial
78
3.4. Sistemas de Partida de Motores de Indução Trifásicos
3.4.1. Influência da tensão na corrente e no conjugado
As chaves convencionais de partida para motores de indução trifásicos são divididas da
seguinte forma:
Tensão plena
Direta
Estrela-Triângulo
Partida
Compensadora
Tensão reduzida
Soft-Starter
Série-Paralelo
Impedância em série
Em alguns casos existe a possibilidade de inversão do sentido de rotação do motor como,
por exemplo, Partida Direta Reversora, Estrela-Triângulo Reversora, etc.
O conversor eletrônico de freqüência também controla a partida do motor de indução,
porém, o seu estudo foge do escopo deste texto.
Na partida com tensão plena (direta) cada enrolamento do motor recebe tensão nominal. Os
valores nominais de corrente de partida (Ipn) e conjugado de partida (Cpn) sob tensão nominal são
dados nos catálogos de fabricantes (tabela 2.4). A alta corrente de partida, sob tensão nominal,
produz grandes perdas por efeito Joule (aquecimento), tanto no motor como na rede de alimentação.
A corrente de partida também produz forte queda de tensão na rede.
Nas chaves de partida com tensão reduzida cada enrolamento do motor recebe uma tensão
menor do que a sua tensão nominal, seja devido as ligações efetuadas (estrela, triângulo, série,
paralelo) ou por ação de um dispositivo auxiliar (autotransformador, variador eletrônico,
impedância em série). A redução de tensão produz redução na corrente de partida e no conjugado de
partida.
Na partida (velocidade n=0) o motor de indução pode ser modelado simplesmente como
uma impedância. Desprezando-se o efeito da saturação magnética, esta impedância pode ser
considerada constante, independentemente da tensão aplicada ao enrolamento. Assim, tem-se:
V
I p I pn
Vn
(3.1)
onde Ip é a corrente de partida para a tensão reduzida V e Ipn é a corrente de partida para a tensão
nominal Vn.
O conjugado de partida e o conjugado máximo são proporcionais ao quadrado da tensão
aplicada a cada enrolamento do motor (Apostila de Máquinas CA, CEFET RS):
C p k 1V 2
C ma k 2 V 2
(3.2)
(3.3)
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
79
onde k1 e k2 são constantes da máquina. Atente-se para o fato do conjugado ser proporcional ao
quadrado da tensão.
Portanto, o conjugado de partida e o conjugado máximo também podem ser expressos por:
V
C p C pn
Vn
C ma
(3.4)
2
V
C man
Vn
2
(3.5)
onde Cman é o conjugado máximo para tensão nominal.
A curva (a) da figura 3.20 mostra um exemplo de comportamento da corrente em função da
velocidade sob tensão nominal, desprezando-se a corrente de magnetização. Neste caso, a corrente
de partida é seis vezes a corrente nominal (Ipn=6In ).
Para o motor alimentado com 50% da tensão nominal, tem-se:
V
I p I pn
Vn
0,5Vn
6I n
Vn
3I n
A curva (b) da figura 3.20 mostra o comportamento da corrente para 50% da tensão
nominal.
I / In
(a)
(b)
n / ns
Figura 3.20 – Características corrente versus velocidade
A curva (a) da figura 3.21 mostra um exemplo de curva de conjugado onde se tem: Cpn=2Cn
e Cman=4Cn.
Eletricidade Industrial
80
Para o motor alimentado com 50% da tensão nominal, das equações (3.4) e (3.5), se tem:
V
C p C pn
Vn
C ma
2
0,5Vn
2C n
Vn
V
C man
Vn
2
2
0,5C n
0,5Vn
4C n
Vn
2
C n
Como a velocidade associada ao conjugado máximo não se altera, obtém-se a curva (b) da
figura 3.21 para 50% da tensão nominal.
T / Tn
(a)
(b)
n / ns
Figura 3.21 – Características conjugado versus velocidade
O conjugado de partida depende do quadrado da tensão aplicada ao estator, portanto, a
redução de tensão produz redução significativa no conjugado de partida. Quando são usadas chaves
de partida com tensão reduzida, de modo geral, é desejável um motor de categoria H (ou D, se for o
caso) para se obter um melhor conjugado de partida.
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
81
3.4.2. Chave Partida Direta
Na chave partida direta o motor está ligado na sua conexão definitiva, de modo que cada
enrolamento do motor recebe tensão nominal no momento da partida. Devido à alta corrente de
partida, as concessionárias de energia elétrica limitam a partida sob tensão plena a motores de
pequeno porte, da seguinte forma:
1 – Alimentação com rede trifásica de baixa tensão (BT) pública
Rede de 380 V até 7,5 cv (inclusive)
Rede de 220 V até 5,0 cv (inclusive)
2 – Alimentação em alta tensão (AT) com transformador próprio até 9% dos kVA do
transformador.
Para o motor em si a partida direta é preferível, pois fornece o máximo conjugado de partida
possível, o que encurta o tempo de aceleração.
O diagrama de ligações da chave partida direta convencional está apresentado na seção 3.3
(exemplo 3.1).
3.4.3. Chave Estrela-Triângulo
A chave estrela-triângulo somente pode ser utilizada em motores de 6 terminais cuja ligação
normal seja triângulo ou motores de 12 terminais cuja ligação normal seja triângulo série ou
paralelo. Na partida o motor é ligado em estrela (série ou paralelo), fazendo com que cada
enrolamento recebe uma tensão menor do que a nominal, o que reduz a corrente de partida em
relação à partida direta.
O circuito de potência da chave estrela-triângulo para o motor de 6 terminais é mostrado na
figura 3.22. Na partida são ligados os contatores K3 e K1 que efetuam a ligação estrela no motor
(rede em 1, 2 e 3; 4, 5 e 6 em curto) . Após a partida o contator K3 é desligado e em seu lugar entra
o contator K2 que, junto com K1 fecha a ligação triângulo (1 com 6, 2 com 4 e 3 com 5; rede em 1,
2 e 3).
R
S
T
F1,2,3
K1
K2
K3
F7
3
6
2
5
1
4
Figura 3.22 - Circuito de potência da chave estrela-triângulo (motor de 6 terminais)
Eletricidade Industrial
82
O circuito de comando (modelo da Siemens) é mostrado na figura 3.23. A seqüência de
operação pode ser resumida da seguinte forma:
1º. Pressiona-se o botão S1 para dar partida no motor.
2º. O circuito eletrônico de relé de tempo estrela-triângulo RY é alimentado.
3º. O contato 15-18 de RY fecha.
4º. A bobina de K3 é alimentada.
5º. O contato 21-22 de K3 abre, impedindo que a bobina de K2 seja alimentada (intertravamento).
6º. O contato 13-14 de K3 fecha.
7º. A bobina de K1 é alimentada.
8º. O contato 13-14 de K1 fecha (retenção).
9º. O contato 43-44 de de K1 fecha (retenção para o botão S1).
10º. Com as bobinas de K3 e K1 alimentadas, os seus contatos principais fecham, fazendo com que
o motor arranque ligado em estrela.
11º. Após transcorrido o tempo ajustado no relé RY o seu contato 15-18 abre.
12º. A bobina de K3 deixa de receber alimentação.
13º. O contato 21-22 de K3 fecha, porém, a bobina de K2 permanece sem alimentação porque o
contato 21-22 de RY ainda está aberto.
14º. O contato 13-14 de K3 abre, mas a bobina de K1 permanece alimentada pelo contato 13-14 de
K1.
15º. Os contatos principais de K3 abrem, desfazendo a ligação estrela. Durante um intervalo de
tempo extremamente curto, enquanto a bobina de K2 for alimentada, o motor é desligado. Esta
transição é dita aberta e deve ser no menor tempo possível.
16º. Alguns milésimos de segundos após, o contato 25-28 de RY fecha.
17º. A bobina de K2 é alimetada.
18º. Os contatos principais de K2 fecham e o motor fica ligado em triângulo, voltando a produzir
conjugado.
19º. O contato 21-22 de K2 fica aberto, realizando o intertravamento entre K2 e K3.
20º. Quando o botão S0 for pressionado o motor será desligado.
F21
F
F7
95
96
S0
11
12
43
23
S1
24
K1
44
25
15
RY
28
18
A1
A2
K3
K2
A2
14
22
A1
A1
K3
RY
N
22
14
K3
21
21
K2
13
13
K1
A1
K1
A2
A2
Figura 3.23 - Circuito de comando da chave estrela-triângulo Siemens
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
83
Análise de conjugado e corrente
Na partida (ligação estrela) cada enrolamento recebe a tensão
VFY
(3.6)
VL
3
onde VL é a tensão de linha da rede e ZF é a tensão de fase.
A corrente de fase na partida é
I FY
VFY
VL
ZF
3Z F
(3.7)
Como a ligação é estrela, tem-se a seguinte corrente de linha:
I LY I FY
VL
3ZF
(3.8)
Se a partida fosse com a ligação triângulo, portanto, partida direta, ter-se-ia:
VFD VL
onde VFD é a tensão de fase na ligação triângulo (delta);
I FD
VFD VL
ZF
ZF
I LD 3I FD
3VL
ZF
(3.9)
(3.10)
(3.11)
Das equações (3.8) e (3.11) obtém-se a relação entre a corrente de linha em estrela
(reduzida) e a corrente de linha em triângulo (direta):
VL
I LY
3Z F 1
I LD
3VL 3
ZF
1
I LY I LD
3
(3.12)
(3.13)
Portanto, desprezando-se as variações da impedância em função do estado de magnetização
do ferro, tem-se que a corrente de partida em estrela é um terço da corrente de partida direta em
triângulo.
A redução da corrente de partida é acompanhada de redução no conjugado de partida. Da
equação (3.4) obtém-se a relação entre o conjugado de partida em estrela (Cp=CpY; V=VL/ 3 ) e o
conjugado de partida em triângulo que é o conjugado de partida nominal (Cpn=CpD; V=VL):
Eletricidade Industrial
84
V
C p C pn
Vn
V / 3
C pY C pD L
V
L
1
C pY C pD
3
2
(3.14)
2
(3.15)
O mesmo procedimento pode ser utilizado para análise do conjugado máximo. Da equação (3.5)
obtém-se:
C ma
V
C man
Vn
V / 3
C maY C maD L
V
L
1
C maY C maD
3
2
(3.16)
2
(3.17)
Conclui-se que o conjugado de partida e o conjugado máximo em estrela são, ambos, um
terço dos respectivos valores para partida direta em triângulo.
As curvas de conjugado em Y (CY) e em (C) são apresentadas na figura 3.24. Na ligação
em Y a velocidade cresce até o instante da comutação, a partir daí a ligação é trocada para e a
velocidade atinge o valor final. Como se pode ver, a curva de conjugado em Y fica muito baixa, o
que aumenta o tempo de aceleração.
T / Tn
T
TY
TR
n / ns
comutação
Figura 3.24 - Curva de conjugado em Y (CY), em (C) e conjugado resistente (CR)
As curvas de corrente em Y (IY) e em (I) são apresentadas na figura 3.25. No instante da
comutação ocorre um pico de corrente. Para que este pico não seja muito elevado, no momento da
comutação, a velocidade já deve ter atingido 90% da velocidade síncrona. Caso isto não ocorra, o
pico de corrente equivale à outra partida e não há vantagem no uso da chave.
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
85
I / In
I
IY
n / ns
comutação
Figura 3.25 - Curva de corrente em Y (IY) e em (I)
Características positivas
Custo reduzido.
Permite elevada freqüência de manobras.
Corrente de partida reduzida a 1/3 da corrente de partida nominal.
Dimensões relativamente pequenas.
Características negativas
Aplicação específica para motores de 6 ou 12 terminais.
A ligação normal do motor deve ser triângulo.
Conjugado de partida reduzido a 1/3 do conjugado de partida nominal.
O motor deve atingir pelo menos 90% da sua velocidade nominal em estrela, para que
durante a comutação o pico de corrente não atinja valores elevados, próximos da corrente de
partida direta.
Aplicações
Acionamento de cargas que apresentam baixo conjugado resistente na partida e baixa inércia
ou, melhor ainda, quando a partida for a vazio.
Exemplos: bombas centrífugas, ventiladores, etc.
Eletricidade Industrial
86
3.4.4. Chave Compensadora
O equipamento responsável pela redução da corrente de partida na chave compensadora é o
Auto-transformador. Na partida o motor é alimentado por um auto-transformador trifásico com
tensão reduzida, produzindo uma redução na corrente de partida em relação à partida direta.
Geralmente, o auto-transformador possui derivações (taps) para 50%, 65% e 80% da tensão
nominal, que são escolhidos conforme a necessidade de conjugado de partida.
Após a partida o motor passa a ser alimentado diretamente pela rede trifásica, recebendo sua
tensão nominal.
A chave compensadora não efetua nenhuma alteração nas ligações do motor como faz a
chave estrela-triângulo. Portanto, são suficientes apenas três terminais acessíveis do motor, ou seja,
na chave compensadora a ligação definitiva do motor pode ser tanto estrela como triângulo, tanto
série como paralelo, dependendo somente tensão da rede e das tensões nominais do motor.
O circuito de potência da chave compensadora é mostrado na figura 3.26. Na partida são
acionados os contatores K3, que fecha o centro de estrela do auto-transformador, e K2, para
alimentação do primário do auto-transformador. Após a partida a seqüência de manobra dos
contatores é a seguinte: inicialmente o contator K3 abre seus contatos; a seguir, K1 é acionado,
conectando diretamente o motor na rede; finalmente, o contator K2 abre seus contatos. Esta
seqüência faz com que a transição seja fechada, ou seja, em nenhum momento a corrente do motor é
interrompida. Mesmo quando K3 abre seus contatos, uma parcela do enrolamento do autotranformador funciona como uma impedância em série com o motor.
R
S T
F1,2,3
K1
K2
K3
80%
65%
50%
F7
M
Figura 3.26 - Circuito de potência da Chave Compensadora
A chave estrela-triângulo descrita na seção anterior tem transição aberta, porque a
alimentação do motor é interrompida durante alguns milésimos de segundo durante a comutação.
Isto pode conduzir a picos de corrente e conjugado durante a comutação. Uma descrição detalhada
deste fenômeno pode ser encontrada em Lobosco, pág. 79, vol.1. Nesta referência bibliográfica
descreve-se uma chave estrela-triângulo especial com transição fechada.
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
87
O circuito de comando (modelo da Siemens) é mostrado na figura 3.27. A seqüência de
operação pode ser resumida da seguinte forma:
1º. Pressiona-se o botão S1 para dar partida no motor.
2º. A bobina do contator K3 é alimentada.
3º. O contato 13-14 de K3 fecha e a bobina de K2 é alimentada.
4º. O contato 21-22 de K3 abre e impede a alimentação da bobina de K1 (intertravamento).
5º. O contato 13-14 de K2 fecha e funciona como retenção para o botão S1.
6º. Com as bobinas de K3 e K2 alimentadas, os seus contatos principais fecham e o motor parte
com tensão reduzida a partir do auto-transformador.
7º. O contato 43-44 de K2 fecha e ocorre a alimentação do circuito eletrônico do relé de tempo com
retardo na energização K6. Inicia-se a contagem do tempo programado.
8º. Transcorrido o tempo programado, o contato 15-16 do relé K6 abre.
9º. A alimentação da bobina de K3 é cortada.
10º. O contato 13-14 de K3 abre.
11º. Os contatos principais de K3 abrem, desfazendo o centro estrela, o efeito transformador deixa
de existir, porém, o motor continua alimentado por K2 com a impedância de uma parte do
enrolamento do auto-transformador em série com o motor.
12º. O contato 21-22 de K3 fecha.
13º. A bobina de K1 é alimentada.
14º. Os contatos principais de K1 fecham e o motor é conectado diretamente na rede trifásica.
15º. O contato 21-22 de K1 abre impedindo o funcionamento de K3 (intertravamento).
16º. O contato 13-14 de K1 fecha (retenção para após a abertura de K2).
17º. O contato 43-44 de K1 fecha.
18º. A bobina do contator auxiliar K11 é alimentada.
19º. O contato 21-22 de K11 abre.
20º. A alimentação da bobina de K2 é cortada.
21º. Os contatos principais de K2 abrem, eles já não têm mais função.
F21
F
F7
95
96
11
S0
12
23
S1
13
K2
24
K11
K3
K2
22
K2
A2
44
K3
22
A1
A1
K1
K6
A2
21
43
A1
A1
N
14
21
21
22
44
13
K3
16
K1
43
K1
14
14
15
K6
13
K1
A2
A1
K11
A2
A2
Figura 3.27 - Circuito de comando da Chave Compensadora Siemens
Eletricidade Industrial
88
Análise de conjugado e corrente
A relação entre a tensão secundária e a tensão primária do auto-transformador (x) depende
do tap selecionado (x=0,5, x=0,65 ou x=0,80), podendo ser expressa por:
(3.18)
VLm
VL
onde VL é a tensão de linha da rede, VLm é a tensão de linha no motor.
Tomando-se o auto-transformador como ideal tem-se a relação inversa para as correntes de
linha na rede de alimentação (IL) e no motor (ILm):
x
x
(3.19)
IL
I Lm
Como a ligação do motor não é alterada pela chave compensadora, pode-se tomar como
referência para análise tanto a ligação em estrela como em triângulo, pois os resultados são os
mesmos.
Tomando-se a ligação estrela como referência, tem-se, para partida direta:
IF IL Ipn
VF
V
L
ZF
3ZF
(3.20)
Para partida compensada tem-se:
ILm IFm
VFm
V
V
Lm x L
ZF
3ZF
3ZF
I Lm xI pn
(3.21)
(3.22)
Da equação (3.19), em conjunto com (3.22), tem-se:
IL xILm
(3.23)
IL x 2 Ipn
(3.24)
A equação (3.22) mostra que a corrente de partida no motor fica reduzida na mesma
proporção em que a tensão é reduzida (conforme o tap selecionado). A equação (3.24) mostra que a
corrente no alimentador fica reduzida proporcionalmente ao quadrado da redução da tensão.
O conjugado de partida pode ser determinado da seguinte forma:
V
C p C pn
Vn
(3.25)
2
xV
C pc C pn L
VL
Cpc x 2Cpn
2
(3.26)
(3.27)
A equação (3.27) demonstra que o conjugado de partida fica reduzido proporcionalmente ao
quadrado da redução da tensão.
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
89
Características positivas
No tap de 65% o conjugado de partida é levemente superior ao da chave estrela-triângulo:
Cpc=x2Cpn=(0,65)2Cpn=0,42Cpn
No tap de 80% o conjugado de partida é bem superior ao da chave estrela-triângulo:
Cpc=x2Cpn=(0,80)2Cpn=0,64Cpn
Pode-se mudar o tap para tentar adequar o conjugado de partida as características da carga.
Em qualquer tap a corrente de partida na rede fica reduzida em relação à corrente de partida
nominal:
Tap de 50% IL=x2Ipn=(0,50)2Ipn=0,25Ipn
Tap de 65% IL=x2Ipn=(0,65)2Ipn=0,42Ipn
Tap de 80% IL=x2Ipn=(0,80)2Ipn=0,64Ipn
A transição fechada tende a impedir picos de corrente e conjugado.
Bastam três terminais para o motor, ou seja, a sua ligação é indiferente para a chave
compensadora.
Possibilidade de partida seqüencial para N motores com um auto-transformador apenas.
Características negativas
Custo elevado do autotransformador.
Tamanho do auto-transformador, encarecendo o painel.
Limitação na freqüência de manobras, devido ao aquecimento do auto-transformador.
No tap de 50% o conjugado de partida é menor do que na chave estrela-triângulo:
Cpc=x2Cpn=(0,50)2Cpn=0,25Cpn
Aplicações
Nos casos onde a chave estrela-triângulo não pode ser usada, seja por impossibilidade de
conexão ou por insuficiência de conjugado.
Eletricidade Industrial
90
3.4.5. Chave Série-Paralelo
Os motores de 9 ou 12 terminais permitem a conexão em série ou paralelo, tanto em estrela
como em triângulo. Se o motor tiver sua ligação normal em paralelo (estrela ou triângulo) pode-se
ligá-lo em série na partida. Com isto cada metade do enrolamento da fase recebe uma tensão menor
do que a sua tensão nominal, o que reduz a corrente de partida em relação à partida direta.
O circuito de potência da chave série-paralelo WEG para o motor de 9 terminais é mostrado
na figura 3.28. Na partida são ligados os contatores K4 e K1 que efetuam a ligação estrela-série no
motor. Após a partida o contator K4 é desligado e em seu lugar entram os contatores K2 e K3 que
efetuam a ligação estrela-paralelo.
Figura 3.28 - Circuito de potência da Chave Série-Paralelo ou Dupla-Estrela WEG
O circuito de comando é apresentado na figura 3.29. Pressionando-se a botoeira S1 a bobina
de K4 é imediatamente alimentada. Isto faz com que o contato 13-14 de K4 feche e alimente
também a bobina de K1 e o circuito eletrônico do relé tempo KT1 (tipo retardo na energização)
iniciando-se a contagem do tempo programado. Com o acionamento de K4 e K1 o motor arranque
com a ligação estrela-série. A retenção é feita pelo contato 43-44 de K1. O contato 21-22 de K4
impede a operação simultânea de K4 com K2 e K3 (intertravamento).
Após ser transcorrido o tempo ajustado, o contato 15-16 de KT1 abre, cortando a
alimentação da bobina de K4, e o contato 15-18 de KT1 fecha. Como o contato 21-22 de K4 fecha,
a bobina de K3 é energizada. O contato 13-14 de K1 faz a retenção para K1 e KT1. O contato 13-14
de K3 fecha e a bobina de K2 é alimentada. O contato 13-14 de K2 fecha e mantém as bobinas de
K2 e K3 alimentadas. O contato 21-22 de K2 abre para impedir qualquer acionamento acidental de
K4 (intertravamento).
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
91
Com as bobinas de K1, K2 e K3 alimentadas o motor fica ligado na sua conexão definitiva
(estrela-paralelo) para operação em regime permanente. A lâmpada K1 acesa sinaliza que o motor
está em operação normal.
Figura 3.29 - Circuito de comando da Chave Série-Paralelo
Pode-se demonstrar (exercício 5, seção 3.5) que esta chave reduz tanto a corrente de partida
como o conjugado de partida a 25% dos respectivos valores para partida direta. Portanto, a
aplicação é restrita a motores de 9 ou 12 terminais cuja ligação definitiva é paralelo (muito comum
nos motores americanos) e a partida é com carga leve ou a vazio.
Eletricidade Industrial
92
3.4.6. Chave de Partida com Impedância Primária
Em casos raros, como motores de média tensão (acima de 600 V) e grande porte pode-se
usar resistências ou reatâncias em série com o estator durante a partida para reduzir a tensão
aplicada ao motor e, por conseqüência, limitar a corrente de partida.
A figura 3.30 apresenta o circuito de potência da chave de partida com impedância primária.
Na partida somente o contator K2 é energizado, de modo a inserir as impedâncias externas Z em
série com o estator. Durante o período transitório de aceleração a corrente vai diminuindo,
reduzindo a queda na impedância externa, e a tensão aplicada ao motor vai aumentando. Após o
tempo de partida programado, o contator K1 também é energizado e o motor passa a receber tensão
nominal. O contator K2 pode ser então desenergizado porque não tem mais função no circuito.
Observe-se que esta seqüência de operação efetua transição fechada, impedindo picos de
corrente e conjugado durante a comutação.
Deixa-se o circuito de comando desta chave como um exercício proposto (exercício 6, seção
3.5).
R
S T
F1,2,3
K1
K2
Z
Z
Z
F7
M
Figura 3.30 - Circuito de potência da chave de partida com impedância primária
O problema deste método de partida é que a redução do conjugado de partida é maior do que
a redução da corrente de partida. Nas chaves estrela-triângulo, série-paralelo e compensadora a
corrente de partida e o conjugado de partida são ambos reduzidos na mesma proporção graças a
alterações de ligações ou a inserção do auto-transformador.
A redução direta da tensão nos terminais do motor faz com que a redução da corrente de
partida seja proporcional à redução de tensão, porém, a redução no conjugado de partida é
proporcional ao quadrado da redução de tensão (equações 3.1 e 3.4). Para reduzir a corrente de
partida à metade, por exemplo, o conjugado de partida fica reduzido à quarta parte.
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
93
3.4.7. Chave de Partida com Resistência Secundária
Nos motores de rotor bobinado insere-se uma resistência externa no circuito do rotor
(secundário), reduzindo assim a corrente de partida no rotor e, conseqüentemente, no estator. Este
aumento da resistência do rotor também aumenta o conjugado de partida porque reduz a defasagem
entre as forças eletromotrizes e as correntes no rotor.
A figura 3.31 apresenta um esquema simplificado deste método de partida. O motor parte
com a máxima resistência rotórica (todos os resistores em série) e à medida que a velocidade vai
crescendo os resistores são seqüencialmente retirados (curto-circuitados).
R
S T
F0
K2
K1
K3
K4
RS1
M
R2.1
R2.2
R2.3
Figura 3.31 - Circuito de potência da chave de partida com Resistência Secundária
É um dos melhores métodos de partida para motores de indução trifásicos, porém, é o mais
caro e só é usado em situação de extrema dificuldade de partida.
Eletricidade Industrial
94
3.4.8. Chave de Partida Estática (Soft-Starter)
O soft-starter é um equipamento eletrônico usado para dar partida suave e fazer a parada de
motores de indução trifásicos. Para isto, ele controla a tensão eficaz aplicada ao motor, o que influi
na corrente e no conjugado. Há muitos fabricantes de soft-starters, porém as suas características são
muitos semelhantes. Nesta seção são descritas as características gerais dos soft-starters, sem se ater
especificamente em nenhuma marca. Nas aulas práticas serão analisadas características específicas
de algumas marcas.
É conveniente salientar que o soft-starter não é usado para controlar a velocidade do motor
porque ele não altera a freqüência e sim o valor eficaz da tensão apenas durante os transitórios de
partida e parada.
O circuito de potência do soft-starter possui em cada fase dois tiristores (SCRs) ligados em
anti-paralelo e comandados por um circuito eletrônico microprocessado. São usados dois tiristores
em anti-paralelo porque deve existir condução nos dois semi-ciclos da tensão da rede, já que o
motor é de corrente alternada. Esta configuração de circuito é denominada Gradador e a tensão
eficaz de saída depende do ângulo de disparo dos tiristores
Figura 3.32 - Circuito de potência do Soft-Starter
O processo de partida mais simples é através de uma rampa de tensão. Assim, o ângulo de
disparo dos tiristores inicialmente é alto e vai sendo reduzido gradativamente de modo que a tensão
senoidal da rede é recortada e a tensão eficaz aplicada ao motor é elevada continuamente (figura
3.33).
Figura 3.33 – Tensão da rede e tensão no motor durante a partida
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
95
A redução da tensão produz uma diminuição no conjugado de partida e no conjugado
máximo (ambos proporcionalmente ao quadrado da tensão) e mantém inalterado o escorregamento
em que ocorre o conjugado máximo. Com isto a curva de conjugado do motor aproxima-se da curva
de conjugado resistente da carga, se comparado com a partida direta, produzindo uma redução no
conjugado de aceleração (diferença entre o conjugado do motor e o conjugado da carga) o que
permite uma partida suave do motor.
Durante a parada do motor é possível fazer uma rampa de redução da tensão (produzindo
uma parada suave), uma frenagem com injeção de corrente continua (produzindo uma parada
brusca) ou uma parada normal. Estas características serão enfocadas mais detalhadamente nos
próximos itens.
Em relação aos métodos de partida tradicionais o soft-starter apresenta as seguintes
vantagens:
permite adaptar a curva de conjugado do motor à carga fazendo partida e parada suaves, o
que reduz trancos e permite maior vida útil do acionamento;
permite limitação da corrente de partida;
possui grande variedade de métodos de proteção para o motor;
possibilita economia de energia quando o motor está com pouca carga ou a vazio;
permite frenagem do motor.
As seguintes desvantagens podem ser destacadas:
investimento inicial maior;
redução maior no conjugado do que na corrente, porque o conjugado de partida é
proporcional ao quadrado da tensão enquanto a corrente de partida é proporcional a tensão.
A figura 3.34 mostra o arranjo básico para as conexões do circuito de potência do SoftStarter. Alguns componentes podem ser omitidos ou outros acrescentados, dependendo do modelo
do Soft-Starter de do tipo de comando desejado (frenagem, reversão, etc).
Figura 3.34 – Circuito de potência típico completo
O ajuste dos parâmetros de operação dos soft-starters pode ser feito no seu próprio console
(possível em todos os modelos), através de uma IHM (interface homem-máquina) adicionada
externamente ou, ainda, através de um microcomputador. As duas últimas opções não são
encontradas em todos os modelos.
Eletricidade Industrial
96
Classes de arranque
De modo geral, os soft-starters possibilitam os seguintes tipos de arranque: rampa de tensão;
limitação de corrente; rampa de tensão e limitação de corrente; rampa de tensão, limitação de
corrente e impulso de partida. A partida com rampa de tensão é padrão para todos os modelos,
porém, os outros tipos nem sempre são disponíveis.
a) Arranque com rampa de tensão (figura 3.35)
Neste tipo de partida a tensão inicial de rampa ou pedestal tensão (V0) geralmente é ajustada
entre 20% e 100% da tensão nominal (Vn). O tempo de rampa (tR), ou seja, o tempo programado
para a tensão variar do valor inicial até o nominal fica na faixa entre Os e 180s.
Se a partida fosse direta, a corrente de partida atingiria o valor Ipn (corrente de partida
nominal) representado pela linha tracejada e diminuiria à medida que a rotação fosse aumentando,
até chegar no valor nominal em regime permanente (In). A corrente de partida (I0) com tensão
reduzida fica menor do que a corrente de partida nominal, dependendo do valor de V0.
Figura 3.35 – Rampa de tensão
b) Arranque com limitação de corrente (figura 3.36)
Em muitos modelos é possível impor um limite para a corrente durante a partida (IB,
corrente de bloqueio). Considere que a tensão inicial de rampa está ajustada em 100% , o tempo de
rampa está ajustado em zero e a corrente está limitada no valor IB. Pelo ajuste de rampa feito, a
partida seria direta e a corrente atingiria o valor Ipn representado na curva tracejada. Porém o softstarter não deixa a corrente passar do valor ajustado IB enquanto o motor estiver partindo. Para
tanto, uma rampa de tensão é automaticamente produzida pelo aparelho. Quando a corrente cai
abaixo do valor de limitação a tensão nominal é aplicada.
Figura 3.36 – Limitação de corrente
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
97
c) Arranque com rampa de tensão e limitação de corrente (figura 3.37)
Este caso é uma combinação dos dois anteriores. A rampa é ajustada com uma tensão inicial
V0 e um tempo tR e é incluída uma limitação de corrente IB. A corrente inicia com uma intensidade
I0 até atingir a intensidade limitada IB, onde permanece durante um tempo, e só diminui após o
motor ter atingido uma velocidade próxima da nominal. Nesta situação a rampa inicialmente
programada (representada em tracejado) não é respeitada para que a corrente não ultrapasse o valor
limitado.
Figura 3.37 - Rampa de tensão e limitação de corrente
d) Arranque com rampa de tensão, limitação de corrente e impulso de partida (figura 3.38)
Os arranques apresentados até agora são indicados para cargas que apresentem um
conjugado resistente baixo durante a partida e que este cresça com a rotação como, por exemplo,
bombas centrífugas e ventiladores. Algumas cargas têm conjugado resistente aproximadamente
constante, independentemente da rotação (elevadores, guindastes, esteiras transportadoras, etc),
porém, o conjugado resistente é um pouco maior na partida devido ao atrito estático.
Para situações em que a carga possui um conjugado de atrito estático alto alguns softstarters dispõem da função impulso de partida (impulso de ruptura ou kick-start). Ele consiste em
aplicar um pulso de tensão (VI) de curta duração (tI) para melhorar o conjugado de partida, antes de
começar a rampa de tensão. A corrente de partida atinge um valor II durante o impulso de tensão, a
seguir cai para o valor ajustado como limitação de corrente (IB) e próximo a velocidade nominal
atinge o valor de regime permanente.
A amplitude do pulso de tensão (VI) deve ser menor que a tensão da rede, para que a
corrente de partida produzida por ele não seja igual a corrente de partida direta (Ipn). A duração do
pulso de tensão (tI) deve ser pequena (milésimos de segundo) para que a partida seja suave.
Figura 3.38 - Rampa de tensão, limitação de corrente e impulso de partida.
Eletricidade Industrial
98
Classes de parada
Os soft-starters, em sua maioria, possibilitam os seguintes tipos de parada: normal; suave;
frenagem em CC.
a) Parada normal
Neste caso a tensão aplicada ao motor é reduzida do valor nominal para zero
instantaneamente ao chegar a ordem de desligamento. O motor vai parar conforme a inércia e o
amortecimento do acionamento. Com inércias pequenas o tempo de parada é curto e com inércias
grandes é longo.
b) Parada suave
Na parada suave a tensão é reduzida continuamente por uma rampa de desaceleração. Ela é
usada no acionamento de cargas com pequeno momento de inércia, onde a parada normal seria
muito rápida e indesejável.
Em Esteiras Transportadoras, por exemplo, uma parada súbita poderia causar queda dos
materiais transportados. Durante a parada correntes elevadas podem ocorrer, devido a redução de
tensão, por isto a função parada para bombas geralmente é usada em soft-starters com proteção
eletrônica de sobrecarga.
O ajuste para parada normal em uma bomba pode produzir parada brusca e um aumento de
pressão na tubulação formando o conhecido "Golpe de Ariete" que pode trazer algum dano
mecânico na tubulação ou nas suas válvulas. Neste caso a parada suave é bastante utilizada, tanto
que alguns soft-starters possuem a função parada (suave) para bombas.
c) Frenagem CC
Este método consiste em uma parada brusca do motor através de aplicação de corrente
contínua aos seus enrolamentos. O campo magnético deixa de ser girante e passa a ser estacionário,
porém, enquanto o rotor permanece em movimento, são induzidas correntes nele que produzem um
conjugado freante.
A frenagem é usada com cargas de inércia elevada que produzem um tempo de parada
normal muito grande como, por exemplo, grandes ventiladores, ou por exigência do funcionamento
da máquina acionada.
Economia de Energia
Existem situações que, durante um período, o motor permanece ligado a vazio ou com pouca
carga. Nestas situações pode-se usar o Soft-Starter para fazer economia de energia mediante a
aplicação de uma tensão mais baixa ao motor o que reduz as perdas no cobre e as perdas no ferro.
Se a função está ativada o soft-starter vigia a carga e aplica tensão de acordo com o
conjugado exigido do motor. A quantidade de energia economizada depende de vários fatores:
potência do motor, número de pólos, projeto do motor e potência exigida pela carga. A figura 3.39,
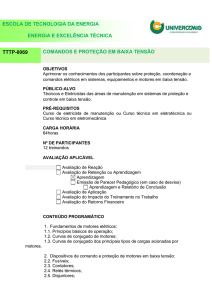
obtida de manuais da Siemens, mostra a economia de energia em função da potência do motor e da
carga acionada. Um motor de 4 kW operando com 25% de carga tem uma economia de 19% de
energia e um motor de 150 kW operando também com 25% de carga tem uma economia de energia
de 12%.
Por outro lado, deve-se tomar cuidado quando a carga é de tração (guinchos, elevadores de
carga), por que o motor pode atingir velocidades maiores que a síncrona. Neste caso, deve-se
desativar a função economia de energia. Nem todos os soft-starters têm a função economia de
energia.
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
99
Figura 3.39 - Economia de energia em função da potência do motor e da carga acionada.
Operação com Contator de Bypass
O contator de bypass é um contator que é ligado em paralelo com o circuito de potência do
soft-starter, conforme mostra a figura 3.40. A partida do motor é feita pelo soft-starter e, após o
arranque finalizado, o contator de bypass é acionado.
A sua utilização faz com que o motor seja diretamente ligado na rede, de forma que a
corrente não atravessa os tiristores. Com isto elimina-se a perda de potência nos tiristores e também
a parte de potência esfria mais rapidamente até a temperatura ambiente permitindo uma maior
freqüência de arranques. Ele também é utilizado para arranque seqüencial de vários motores com
apenas um soft-starter.
Figura 3.40 – Acionamento com contator de bypass
Eletricidade Industrial
100
Operação com Capacitores de Correção
No caso de utilização de capacitores de correção do fator de potência (figura 3.41), estes não
devem estar conectados durante a partida do motor devido à existência de harmônicas geradas pelo
soft-starter. A função economia de energia também não deve ser ativada.
Figura 3.41 – Acionamento com contator de bypass
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
101
3.5. Exercícios
1. Descreva o funcionamento da chave apresentada abaixo.
R
S T
F1
F
RS
F0
K1
B0.1
B0.2
B0.3
B1.1
B1.2
B1.3
K1
RS
K1
M
N
2. Desenvolva uma chave de comando para um motor Dahlander de conjugado constante. Devem
existir três botões pulsadores de comando, um botão para cada velocidade e um botão para desligar
o motor. A proteção deve ser feita por fusíveis e relés bimetálicos. O sentido de rotação do motor
deve permanecer inalterado nas duas velocidades.
3. Explique a diferença entre o circuito de comando da chave partida direta reversora da figura
abaixo e o da figura 3.7.
F1
F
B0
RS1
B1
N
RS2
K1
B2
K2
K1
K1
K2
K2
Eletricidade Industrial
102
4. Desenvolva uma chave de partida para um motor de indução trifásico com comutação polar por
dois enrolamentos independentes no estator. A chave deve funcionar da seguinte forma:
- uma botoeira S1 dá a partida no motor através do enrolamento de baixa rotação;
- transcorrido um certo tempo, ajustável pelo operador, o enrolamento de baixa rotação é desligado
e o enrolamento de alta rotação é alimentado;
- quando uma botoeira S0 é pressionada, o enrolamento de alta rotação é desconectado e o
enrolamento de baixa rotação é energizado, durante o intervalo de tempo ajustado;
- após este intervalo de tempo o motor é desligado completamente;
- o sentido de rotação deve ser o mesmo nas duas velocidades;
- deve haver um intertravamento elétrico impedindo que os dois enrolamentos sejam alimentados
simultaneamente;
- a proteção contra curto-circuito e contra sobrecarga deve ser feita por fusíveis e relés bimetálicos.
5. Demonstre que a chave série-paralelo reduz a corrente de partida e o conjugado de partida para ¼
dos respectivos valores de partida direta.
6. Desenvolva o circuito de comando para uma Chave de Partida com Impedância Primária.
3.6. Práticas
Prática no 01 – Montagem de chaves de partida convencionais
1a. Montar uma chave magnética para um sistema automático de bombeamento de água com dois
reservatórios, superior e inferior.
1b. Montar uma chave partida direta reversora.
1c. Montar uma chave estrela-triângulo.
1d. Montar uma chave compensadora.
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
103
Prática no 02 - Simulador de defeitos: Chave Partida-direta
Defeitos: DF-02, DF-03, DF-04, DF-05 e DF-06.
Material necessário:
Simulador de Defeitos em Quadros de Comando.
Esquema do Quadro de Comando.
Multiteste.
Roteiro
1 – Alimente o Quadro de Comando a partir de uma rede trifásica de 380V/60Hz.
2 – Ligue a CHAVE GERAL existente no painel do quadro de comando.
3 – Verifique se a lâmpada indicadora de COMANDO LIGADO acendeu.
4 – Anote a TENSÃO DE COMANDO indicada no voltímetro: V=___________.
5 – Ligue a chave partida-direta (botão preto).
6 – Verifique se o motor funcionou e verifique também se a sinalização de motor LIGADO
funcionou.
7 – Verifique quais os contatores que estão energizados. Verifique no diagrama qual é a necessidade
destes contatores estarem energizados.
8 – Desligue o motor (botão vermelho).
9 – Desligue a CHAVE GERAL.
10 – Chame o Professor para que ele insira um defeito no circuito da chave partida direta.
11 – Ligue a CHAVE GERAL.
12 – Verifique qual o sintoma apresentado e descreva-o.
13 – Pesquise o defeito, analisando o esquema de ligações. Caso seja necessário, utilize o
multiteste.
14 – Desligue a CHAVE GERAL.
15 – Indique, no diagrama que você tem em mãos, a ligação da chave simuladora de defeito.
16 – Repita os passos 10 a 15 para outros defeitos.
Eletricidade Industrial
104
Prática no 03 - Ligação e Parametrização do Soft-Starter PowerBoss
Materiais: motor de indução trifásico (380V e I<4A); soft-starter PowerBoss; interruptor simples;
amperímetro ferro móvel 10A; multiteste; Cabos.
Roteiro
1. Execute as ligações básicas para o PowerBoss.
3 380 V / 60Hz
R
S
T
Seccionadora
com fusível
L1
L2
L3
T1
T2
T3
H1
N
6
220 V
5
F
4
3
CONN5
RL1
RELÉ DE
OPERAÇÃO
2
1
H2
N
220 V
6
5
4
3
CONN6
RL2
RELÉ
PROGRAMÁVEL
2
1
4
S
3
ENTRADA
DIGITAL
2
1
LIGA /
DESLIGA
A
M
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
105
2. A partida será através de rampa de tensão, conforme a figura abaixo.
V (eficaz)
Vn
V0
t
tR
3. As chaves 8, 9, 10, 11 e 12 configuram a rampa de tensão. Ajuste para as posições destacadas.
- 11 e 12: tensão inicial de rampa (pedestal)
11 ON e 12 ON
V0=30%Vn
11 OFF e 12 ON
V0=40%Vn
11 ON e 12 OFF
V0=50%Vn
11 OFF e 12 ON
V0=70%Vn
- 8, 9 e 10: tempo de rampa (aceleração e desaceleração)
8 ON, 9 ON e 10 ON
8 OFF, 9 ON e 10 ON
8 ON, 9 OFF e 10 ON
8 OFF, 9 OFF e 10 ON
8 ON, 9 ON e 10 OFF
8 OFF, 9 ON e 10 OFF
8 ON, 9 OFF e 10 OFF
8 OFF, 9 OFF e 10 OFF
AJUSTE
tR=0,50 s
tR=2,00 s
tR=5,00 s
tR=10,0 s
tR=20,0 s
tR=30,0 s
tR=60,0 s
tR=120 s
4. Ajuste os demais parâmetros
Chave 7 – Seletor de parada: ONdesaceleração e OFFparada normal
Chave 6 – Otimização de energia: ONdesativada e OFFativada
Chave 5 – Tensão mínima: ON83% e OFF67%
Chave 4 – Limite de corrente: ONativada e OFFdesativada
Chave 3 – Funcionamento emergencial: ONativada e OFFdesativada
Chave 2 – Relé RL2 programável: ONrelé de falha e OFFrelé de topo de rampa
Chave 1 – Freqüência da rede: ON60 Hz e OFF50Hz
AJUSTE
Eletricidade Industrial
5. Conecte o multiteste na escala de Volts adequada para medir a tensão aplicada ao motor.
6. Dê partida e observe a tensão e a corrente no motor.
7. Após o motor atingir o regime permanente, meça a tensão aplicada ao motor:V=...............
8. Meça a corrente no motor: I=..................
9. Descreva as funções das lâmpadas H1 e H2.
10. Desative a função economia de energia.
11. Meça corrente e tensão: I=...............; V=....................
12. Anote conclusões dos itens 6 a 11.
13. Desligue o motor e observe a tensão e a corrente.
14. Anote conclusões sobre a parada.
15. Repita os itens 6 a 14 com outras rampas de tensão.
16. Mude a função do relé programável RL2 e observe a diferença em relação à função inicial.
106
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
107
Prática no 04 - Comando e Parametrização do Soft-Starter Via Computador
Materiais:
Motor de indução trifásico com freio de PRONY
Microcomputador (486 ou superior) com programa RW22PC instalado
Soft-starter Siemens
Voltímetro de ferro móvel (300V)
Amperímetro de ferro móvel (5A)
Cabos
Roteiro
1.
Execute as ligações entre rede, motor, softstarter e computador.
2.
Ligue o micro e entre no modo DOS.
3.
Entre no diretório SOFT, digitando CD SOFT.
4.
Digite RW22PC e pressione ENTER.
5.
Vá para o menu principal e selecione 2 = PARAMETRIZAÇÃO.
6.
Selecione APLICACIÓN ESTÁNDAR (UM JUEGO DE PARÁMETROS).
7.
Ajuste os parâmetros para:
- parada normal;
- sem impulso de partida (desativado);
- sem economia de energia;
- sem arranque de emergência;
- temperatura ambiente = 40 OC;
- detecção de arranque finalizado = desativado;
- tensão inicial = 25 %;
- tempo de rampa = 20 s;
- tensão limite = 100 %;
- tempo de limitação de tensão = 0;
- corrente limite = 10 ª
8.
Dê partida no MIT (F7) sem carga, cronometre o tempo de rampa e observe a tensão e a
corrente.
9.
Desligue o motor (tecla F8) e observe o voltímetro.
10. Repita os passos 8 e 9 com a função DETECTA ARRANQUE FINALIZADO ativada.
11. Anote conclusões.
12. Modifique os seguintes parâmetros: Vs = 100 %, tR = 0 s, IB = 10 A. Dê a partida e observe a
corrente.
13. Repita o procedimento anterior com IB = 5 A.
Eletricidade Industrial
108
14. Anote conclusões.
15. Ajuste para parada suave com a seguinte rampa de desaceleração:
-
tensão inicial = 100 %;
tensão final = 20 %;
tempo de parada = 10 s..
16. Dê a partida no motor sem carga.
17. Desligue o motor e observe a tensão e a corrente durante a desaceleração.
18. Dê nova partida e aplique carga até que a corrente do motor atinja 2,5 A.
19. Desligue o motor e observe a tensão e a corrente durante a desaceleração.
20. Desligue a carga.
21. Anote conclusões.
22. Ajuste para parada normal.
23. Dê partida no motor, varie a carga e complete a tabela abaixo:
SEM CARGA
COM CARGA
IL (A)
VL (V)
Observação: Após o ensaio não se esqueça de desligar a carga.
24. Ative a função “Economia de Energia” e repita o ensaio
SEM CARGA
COM CARGA
IL (A)
VL (V)
Observação: Após o ensaio não se esqueça de desligar a carga.
25. Anote conclusões.
26. Com o motor desligado, interrompa uma fase. Dê partida no motor e anote conclusões.
27. Carregue o arquivo AJUSTE1.BI1 do HD.
28. Descreva a função das teclas F4, F5 e F6.
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
Prática no 05 - Ligação e Parametrização do Soft-Starter com Contator de Bypass
Materiais:
Motor de indução trifásico com freio de PRONY
Soft-starter Siemens
Módulo de comando e proteção PROBIT
Cabos
Roteiro
1. Analise o digrama abaixo e descreva o seu funcionamento.
109
Eletricidade Industrial
110
2. Indique na figura abaixo as posições dos micro-interruptores para se obter os seguintes ajustes:
-
Parada suave
Impulso de partida desativado
Economia de energia desativada
Partida de emergência desativada
Temperatura ambiente 40oC
Sem detecção de regime permanente
Parametrização no próprio Soft-Starter
3. Indique a posição dos potenciômetros para se obter os seguintes ajustes:
-
Tempo de rampa = 20s
Tensão inicial da rampa = 20%
Sem limitação de corrente
Parada suave com máximo tempo
4. Monte o circuito e verifique o seu funcionamento.
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
Prática no 06 - Ligação e Parametrização do Soft-Starter para Frenagem CC
Materiais:
Motor de indução trifásico com freio de PRONY
Soft-starter Siemens
Módulo de comando e proteção PROBIT
Cabos
Roteiro
1. Analise o diagrama abaixo e descreva o seu funcionamento.
111
Eletricidade Industrial
112
2. Indique na figura abaixo as posições dos micro-interruptores para se obter os seguintes ajustes:
-
Frenagem em CC
Impulso de partida desativado
Economia de energia desativada
Partida de emergência desativada
Temperatura ambiente 40oC
Detecção de regime permanente ativada
Parametrização no próprio Soft-Starter
3. Indique a posição dos potenciômetros para se obter os seguintes ajustes:
-
Tempo de rampa = 30s
Tensão inicial da rampa = 20%
Sem limitação de corrente
Frenagem com mínimo tempo de parada
4. Monte o circuito e verifique o seu funcionamento.
Cap. III –Comando e Proteção de Motores de Indução Trifásicos
113
Prática no. 7 – Ligação e Parametrização do Soft-Starter WEG SSW-05 PLUS
Materiais:
Soft-Starter SSW-05 Plus
Manual do SSW-05 Plus
Amperímetro de ferro móvel 0-5A...10A
Voltímetro de ferro móvel 250 V
Motor de indução trifásico 1,5 cv, 220V/380V
Interruptor simples
Botoeiras liga e desliga
Interruptor simples
Cabos
Roteiro
1. Ajuste todos os microinterruptores (dip-switches) para a posição OFF (para esquerda).
2. Ajuste os trimpots da seguinte forma:
- accel. time=20s
- motor current=30%
- pedestal voltage=30%
- decel. time=20s
3. Execute as ligações da figura 11.2, pagina 73 do manual, incluindo o voltímetro e o amperímetro
para medição de tensão e corrente no motor.
- A1 e A2 são terminais para alimentação do circuito eletrônico
- DI1 (digital input 1): comando liga/desliga motor
- DI2 (digital input 2): reset
4. Dê partida no motor e observe a tensão, a corrente e a velocidade.
Obs.: este soft-starter possui contator de bypass interno.
5. Desligue o motor.
6. Ative somente o microinterruptor PHASE LOSS (falta de fase).
7. Dê partida no motor e observe. Se ocorrer mensagem de falha (led vermelho piscando), consulte
tabela da página 77. Leia também o item 12.4 da página 76. Descreva a razão da falha.
8. Desative a função PHASE LOSS e dê um reset.
9. Leia o item 13 da página 76.
10. Monte o circuito da figura 11.4, página 74.
11. Dê partida no motor.


![Matemática | Professor(a): Eron | Menção: Bimestre: 1º [ ] 2º [ ] 3º [ x](http://s1.studylibpt.com/store/data/002254247_1-e6d99ff08b8781d03ba9e3251ba69d50-300x300.png)