Geometria Analítica e Álgebra Linear
1
Geometria Analítica e Álgebra Linear
Alex Nogueira Brasil
Faculdade de Engenharia Mecânica
Universidade de Itaúna
http://www.alexbrasil.eng.br
[email protected]
01 de fevereiro de 2010
Geometria Analítica e Álgebra Linear
Copyright 2010 by Alex Nogueira Brasil
Nenhuma parte desta publicação poderá ser reproduzida por qualquer meio sem a prévia
autorização do autor.
01 de fevereiro de 2010
Alex N. Brasil
Geometria Analítica e Álgebra Linear
2
Conteúdo
Prefácio
1. O Plano Coordenado
A Reta Real
O Plano Coordenado
Coeficientes Angulares e Equações de Retas
Exercícios Numéricos
2. Matrizes
Introdução
Definição, Conceitos e Operações Básicas
Matrizes Especiais
Operações Complementares e Propriedades
Notação de Somatório
Exercícios Numéricos
Exercícios usando o MatLab
3. Sistemas Lineares
Método de Gauss-Jordam
Matrizes Equivalentes por Linhas
Sistemas Lineares Homogêneos
Exercícios Numéricos
Exercícios usando o MatLab
4. Inversão de Matrizes e Determinantes
Matriz Inversa
Propriedades da Inversa
Método para Inversão de Matrizes
Sistemas Lineares e Inversas
Exercícios Numéricos
Exercícios usando o MatLab
Determinantes
Propriedades do Determinante
Desenvolvimento em Cofatores e Aplicações
Exercícios Numéricos
Exercícios usando o MatLab
5. Vetores
Vetores no Plano e no Espaço
Soma de Vetores e Multiplicação por Escalar
Produto de Vetores
Norma
Produto Escalar
01 de fevereiro de 2010
Alex N. Brasil
Geometria Analítica e Álgebra Linear
3
Projeção Ortogonal
Produto Vetorial
Produto Misto
Exercícios Numéricos
Exercícios usando o MatLab
6. Retas e Planos
Equações de Retas e Planos
Equações da Reta
Equação do Plano
Ângulos, Distâncias e Posições Relativas
Ângulo entre Retas
Ângulo entre Planos
Distância entre Dois Pontos
Distância de Um Ponto a Um Plano
Distância de Um Ponto a Uma Reta
Distância entre Dois Planos
Distância entre Duas Retas
7. Autovalores e Autovetores
Diagonalização
Matrizes Semelhantes
Diagonalização de Matrizes Simétricas
Aplicação na Identificação de Cônicas
Elipse
Hipérbole
Parábola
Apêndice I: Introdução ao MatLab
Bibliografia
Respostas dos Exercícios
Índice Alfabético
01 de fevereiro de 2010
Alex N. Brasil
Geometria Analítica e Álgebra Linear
4
Prefácio
Ao Estudante.
“Nos cursos de matemática do 2 grau, a maioria dos estudantes está acostumada a
tentar resolver primeiro os exercícios para casa, com impaciência, para terminar toda a
tarefa penosa o mais rapidamente possível. Esses estudantes lêem as explicações do
texto apenas como último recurso. Este é o oposto grotesco do procedimento razoável e
tem tanto sentido quanto tentar pôr os sapatos antes das meias”.
Minha sugestão é que vocês leiam primeiro o texto e quando este estiver totalmente
assimilado então e só então passem para os exercícios de casa.
Este texto cobre o material para um curso de um semestre de Geometria Analítica e
Álgebra Linear ministrado nos primeiros semestres para estudantes da área de Ciências
Exatas. O texto pode, mas não é necessário, ser acompanhado do programa MATLAB*.
O conteúdo é dividido em sete capítulos. O Capítulo I faz uma revisão do segundo grau
mostrando o plano coordenado. Os Capítulos II e III tratam das matrizes e sistemas
lineares. Aqui todas as propriedades da álgebra matricial são demonstradas. A resolução
de sistemas lineares é feita usando somente o método Gauss-Jordam (transformando a
matriz até que ela esteja na forma escalonada reduzida). Este método requer mais
trabalho do que o método de Gauss (transformando a matriz, apenas, até que ela esteja
na forma escalonada). Ele foi o escolhido, por que também é usado no estudo da
inversão de matrizes no Capítulo IV. Neste Capítulo é também estudado o determinante,
que é definido usando cofatores.
O Capítulo V trata de vetores no plano e no espaço. Os vetores são definidos de forma
geométrica, assim como a soma e a multiplicação por escalar. São provadas algumas
propriedades geometricamente. Depois são introduzidos sistemas de coordenadas de
forma natural sem a necessidade da definição de base. Os produtos escalar e vetorial são
definidos também geometricamente. O capítulo VI trata de retas e planos no espaço.
São estudados ângulos e distâncias entre retas e planos.
O Capítulo VII traz um estudo da diagonalização de matrizes em geral e a
diagonalização de matrizes simétricas através de uma matriz ortogonal. É feita uma
aplicação ao estudo das seções cônicas.
O MATLAB é um software destinado a fazer cálculos com matrizes (MATLAB =
MATrix LABoratory). Os comandos do MATLAB são muito próximos da forma como
escrevemos expressões algébricas, tornando mais simples o seu uso. Podem ser
incorporados às rotinas pré-definidas, pacotes para cálculos específicos. Usaremos um
pacote chamado gaal com funções que são direcionadas para o estudo de Geometria
Analítica e Álgebra Linear.
01 de fevereiro de 2010
Alex N. Brasil
Geometria Analítica e Álgebra Linear
5
1. O Plano Coordenado
A Reta Real
Um número real é ou um número positivo, ou um número negativo ou zero. Qualquer
número real pode ser classificado como racional ou irracional. Um número racional é
qualquer número que pode ser expresso como a razão de dois inteiros. Isto é, um
número racional é um número da forma p q , onde p e q são inteiros e q 0 .
Sistema de números reais
Inteiros
, –3, –2, –1, 0, 1, 2, 3,
Racionais
2
7
1
, , 4, 0, –5, 3, 87, 2
3
4
4
Irracionais
13 1,732 ,
2 , 3,14159
Obs.: um número real que não é racional é denominado irracional, sendo estes, os
decimais infinitos não periódicos.
Quadro 1.1
Obs.:
Para todo número positivo a, o símbolo a significa sempre a raiz quadrada positiva.
Assim, 4 é igual a 2 e não a –2, embora (2) 2 4 . Se desejamos designar ambas as
raízes quadradas de 4, devemos escrever 4 .
O adjetivo “real” foi originalmente utilizado para distinguir esses números de números
tais como 1 , que foram no passado encarados como “irreais” ou “imaginários”.
Descrevemos números complexos como todas as expressões formais a bi , onde a e b
são números reais e i é a unidade imaginária para a qual i 2 1 então,
1 0 1 i i .
Fig. 1.1
01 de fevereiro de 2010
Alex N. Brasil
Geometria Analítica e Álgebra Linear
6
Desigualdades
Regras:
1. Se a 0 e b c , então ab ac ;
2. Se a 0 e b c , então ab ac ;
3. Se a b , então a c b c para qualquer número c.
Valores Absolutos
O valor absoluto de x ou módulo de x, denotado por | x | , é definido por
x se x 0
| x |
x se x 0
Fig. 1.2
d ( A, B ) | b a |
Não precisa preocupar com a ordem da subtração
Ex.: 1.1
| 3 | 3
| 5 | (5) 5
É claro que a operação de formar o valor absoluto mantém inalterados os números
positivos e troca cada número negativo pelo número positivo correspondente. Em
termos geométricos, o valor absoluto de um número x é simplesmente a distância do
ponto x à origem.
Intervalos
Um intervalo é simplesmente um segmento da reta real. Se suas extremidades são os
números a e b, então o intervalo consiste em todos os números que estão entre a e b. No
entanto, podemos querer incluir ou não as próprias extremidades como parte do
intervalo.
a xb
a xb
x a
x
ou
ou
ou
ou
a, b
a, b
, a
,
intervalo aberto
intervalo fechado
Do ponto de vista estrito, as notações a x b e a, b têm significados diferentes – a
primeira representa uma restrição imposta sobre x, enquanto que a segunda denota um
conjunto –, mas ambas designam o mesmo intervalo.
01 de fevereiro de 2010
Alex N. Brasil
Geometria Analítica e Álgebra Linear
Ex.: 1.2
Resolver a desigualdade x 3 x
x3 x 0
x( x 2 1) 0
x( x 1)( x 1) 0
para
para
para
para
Ex.: 1.3
x 1
1 x 0
0 x 1
x 1
x0
x 1
x 1
–
+
–
+
somar 2 em todos os membros
3
1,
ou
R.: 2,4
Resolva para x: | 3x 2 | 5
3 x 2 5
3 x 7
x 7 3
x 1
7
R.:
x
3
2 x 1 (4 x 3)
6 x 2
x 2
1
R.:
x
3
| 2 x 1 | | 4 x 3 |
2x 1 4x 3
2x 4
Ex.: 1.7
R.: 1,0
1
R.: 3,
3x 2 5
3x 3
x 1
Ex.: 1.6
1
Encontre todos os números reais que satisfazem a desigualdade 4 3 x 2 10
4 3 x 2 10
6 3 x 12
2x4
Ex.: 1.5
Encontre todos os números reais que satisfazem a desigualdade 2 3 x 5 x 8
3x 5 x 6
2x 6
x 3
Ex.: 1.4
7
| 5 x 4 | 3
R.: Desde que o valor absoluto de um número nunca pode ser negativo, esta equação
não tem solução.
01 de fevereiro de 2010
Alex N. Brasil
Geometria Analítica e Álgebra Linear
8
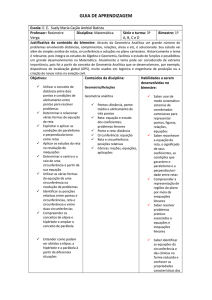
O Plano Coordenado
2 quadrante
(ordenada)
Eixo y
Assim como os números reais são utilizados como coordenadas para pontos de uma
reta, pares de números reais podem ser utilizados como coordenadas para pontos de um
plano. Cada par ordenado x, y chama-se um ponto no plano numérico.
1 quadrante
Eixo x
(abscissa)
Origem
3 quadrante
4 quadrante
Plano xy ou Plano Coordenado
Fig. 1.3
Os eixos dividem o plano em quatro regiões denominadas quadrantes, cuja identificação
é feita no sentido anti-horário. Esses quadrantes são caracterizados pelos sinais de x e y.
1 quadrante,
2 quadrante,
3 quadrante,
4 quadrante,
x0
x0
x0
x0
e
e
e
e
y0
y0
y0
y0
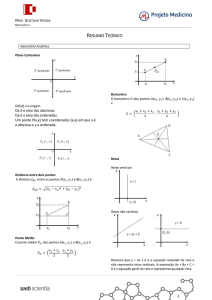
A Fórmula da Distância
Utilizaremos o teorema de Pitágoras para demonstrar a fórmula da distância.
Teorema de Pitágoras:
“Em todo triângulo
retângulo, a soma dos
quadrados dos catetos
é igual ao quadrado
da hipotenusa”.
Fig. 1.4
01 de fevereiro de 2010
Alex N. Brasil
Geometria Analítica e Álgebra Linear
9
Então, a área do quadrado maior é igual a quatro vezes a área do triângulo mais a área
do quadrado menor; isto é,
a b 2 4 1 a b c 2
a2 b2 c2
2
2
2
a 2ab b 2ab c 2
Pelo Teorema de Pitágoras podemos deduzir a fórmula da distância entre dois pontos
quaisquer do plano coordenado.
Tomamos como referência os pontos P1 x1 , y1 e P2 x 2 , y 2 .
d = hipotenusa
| x1 x 2 | = cateto
| y1 y 2 | = cateto
Fig. 1.5
d P1 , P2 | x | 2 | y | 2
2
d P1 , P2 | x 2 x1 | 2 | y 2 y1 | 2
2
d P1 , P2 x 2 x1 y 2 y1
2
2
2
d P1 , P2
Ex.: 1.8
x 2 x1 2 y 2 y1 2
A distância d entre os pontos 4,3 e 3,2 é:
d
3 (4)2 (2 3) 2
01 de fevereiro de 2010
d 74
Alex N. Brasil
Geometria Analítica e Álgebra Linear
Ex.: 1.9
10
Sabe-se que o ponto Pa,2 é eqüidistante dos pontos A3,1 e B2,4 . Calcular a
abscissa do ponto P.
d P , A d P , B
3 a 2 1 22
2 a 2 4 22
a 1
9 6a a 2 1 4 4a a 2 4
2 a 2
Ex.: 1.10 Se o ponto P x, y é tal que sua distância do ponto A3,2 é sempre duas vezes a sua
distância de B 4,1 , encontre uma equação que deve ser satisfeita pelas coordenadas
de P.
d P, A 2 d P , B
x 32 y 22
2
x 42 y 12
2
2
x 32 y 2 2 2 x 4 2 y 12
2
2
2
2
x 6 x 9 y 4 y 4 4 x 8 x 16 y 2 y 1
3x 3 y 38 x 4 y 55 0
2
2
Ex.: 1.11 Demonstre que o triângulo com vértices P1 1,3 , P2 5,1 e P3 2,10 é
isósceles.
d P1 , P2
d P1 , P3
d P2 , P3
5 12 1 32 40
2 12 10 32 170
5 22 1 102 170
Portanto, d P1 , P3 d P2 , P3
Conseqüentemente, o triângulo é isósceles.
Ex.: 1.12 Demonstre analiticamente que os comprimentos das diagonais de um retângulo são
iguais.
| OB |
a 02 b 02
a2 b2
| AC |
a 02 0 b 2
a2 b2
Portanto, | OB | | AC |
01 de fevereiro de 2010
Alex N. Brasil
Geometria Analítica e Álgebra Linear
11
As Fórmulas do Ponto Médio
x
1
x1 x2
2
y
1
y1 y 2
2
Fig. 1.6
Sendo P x, y o ponto médio, então, x é o ponto médio da projeção do segmento sobre
o eixo x.
x x1
1
x2 x1
2
x
1
x1 x2
2
y y1
1
y 2 y1
2
y
1
y1 y 2
2
Ex.: 1.13 Uma das extremidades de um segmento é o ponto A13,19 . Sendo M 9,30 o ponto
médio do segmento, calcular as coordenadas do ponto B, que é a outra extremidade do
segmento.
xM
x A xB
2
yM
y A yB
2
9
13 x B
2
30
19 y B
2
x B 31
y B 41
Ex.: 1.14 Em todo triângulo, o segmento que une os pontos médios de dois lados é paralelo ao
terceiro lado e tem a metade de seu comprimento.
01 de fevereiro de 2010
Alex N. Brasil
Geometria Analítica e Álgebra Linear
12
ab b a
2
2 2
O comprimento do segmento é simplesmente a diferença ente as coordenadas x de suas
extremidades.
Coeficientes Angulares e Equações de Retas
Inclinação
Seja o ângulo que a reta forma com
o eixo x, medido no sentido antihorário.
A medida do ângulo é chamada
inclinação da reta r.
Coeficiente Angular ou Declividade
Fig. 1.7
A toda reta não-vertical está associado um número que especifica sua direção,
denominado coeficiente angular ou declividade; que expressa a tangente trigonométrica
de sua inclinação .
m tg
Coeficiente angular
Fig. 1.8
0 90
tg 0 ; m 0
01 de fevereiro de 2010
90 180
tg 0 ; m 0
90
tg não é definida
0
tg 0 ; m 0
Alex N. Brasil
Geometria Analítica e Álgebra Linear
13
Cálculo do Coeficiente Angular
m tg
tg
m
cat. op.
cat. adj.
y 2 y1
x 2 x1
Fig. 1.9
Escolhemos dois pontos distintos da reta, digamos P1 ( x1 , y1 ) e P2 ( x 2 , y 2 ) . Então, o
coeficiente angular é denotado por m e definido como sendo a razão
m
y 2 y1
x 2 x1
m permanece inalterado se invertermos a ordem
de subtração no numerador e no denominador.
Desta forma, torna-se evidente que uma reta vertical não tem coeficiente angular pois,
não podemos dividir por zero.
De acordo com a figura 1.9 notamos que: se a declividade de uma reta é positiva, então
quando a abscissa de um ponto da reta cresce, a ordenada cresce. Para esta reta, se a
declividade é negativa, quando a abscissa de um ponto da reta cresce, a ordenada
decresce.
Equações de uma Reta
xa
Uma reta vertical caracteriza-se pelo fato de que
todos os seus pontos têm a mesma coordenada x.
Fig. 1.10
m
y 2 y1
x2 x1
(1.1)
Sendo P ( x, y ) um ponto qualquer da reta exceto
( x1 , y1 ) , a declividade também é dada por:
Fig. 1.11
01 de fevereiro de 2010
m
y y1
x x1
(1.2)
Alex N. Brasil
Geometria Analítica e Álgebra Linear
14
O ponto P está sobre a reta que passa por P1 e P2 se e somente se o valor de m da Eq.
(1.1) for o mesmo que o valor de m da Eq. (1.2).
y y1 y 2 y1
x x1
x 2 x1
sendo m
y y1
y 2 y1
x2 x1
y 2 y1
x x1
x 2 x1
(1.3)
y y1 m x x1
(1.4)
Equação da reta
Equação Reduzida da Reta
Se escolhemos o ponto particular (0, b) (isto é, o ponto onde a reta intercepta o eixo dos
y) para o ponto ( x1 , y1 ) , temos:
y b m x 0
y mx b
y mx b
forma denominada
equação reduzida da reta.
(1.5)
coeficiente linear
coeficiente angular
Equação Geral da Reta
Toda reta possui uma equação da forma Ax By C 0 , onde A e B não são ambos
nulos, que é chamada equação geral da reta.
Ax By C 0
A e B não são ambos nulos.
(1.6)
Se B 0 , então A 0 , e a equação pode ser escrita como
x
C
A
que é, equivalente, a equação de uma reta vertical.
y
Por outro lado, se B 0 , então:
y mx b , onde:
m
A
B
A
C
x
B
B
e
b
e essa equação tem a forma
C
B
Ex.: 1.15 Dada a reta que tem a equação 3 x 4 y 7 , encontre a declividade da reta.
Resolvendo para y temos:
01 de fevereiro de 2010
4 y 7 3x
3
7
y x
4
4
m 3 4
b7 4
Alex N. Brasil
Geometria Analítica e Álgebra Linear
15
Ex.: 1.16 O ponto (2,3) divide ao meio aquela porção de uma reta que é delimitada pelos eixos
coordenados. Encontre a equação da reta.
Pelas fórmulas do ponto médio temos:
0a
2
a4
x y
1 (12)
4 6
2
;
b0
2
b2
3
3 x 2 y 12
Ex.: 1.17 Dadas as retas r1 com a equação 2 x 3 y 12 , e r2 com a equação 4 x 3 y 6 , trace
um esboço de cada uma das retas. Encontre as coordenadas do ponto de intersecção de
r1 e r2 .
1 - Encontramos os interceptos a e b, ou seja, substituímos y por 0 e obtemos b.
substituímos x por 0 e obtemos a.
3 y 2 x 12
2
y x4
3
3y 6 4x
4
y x2
3
Para encontrarmos as coordenadas do ponto de intersecção de r1 e r2 , resolvemos as
duas equações simultaneamente. Suas coordenadas devem satisfazer ambas as equações,
pois, o ponto pertence às duas retas.
2
4
x 4 x 2
3
3
x3
2x 6
Então, o ponto de intersecção é:
2 x 3 y 12
y 4
x6
01 de fevereiro de 2010
3 y 2 3 12
y 2
3 y 6 12
3,2
4x 3 y 6
y2
x3 2
x0
y0
Alex N. Brasil
Geometria Analítica e Álgebra Linear
16
Ex.: 1.18 Demonstre por meio de declividades que os quatro pontos A6,2 , B8,6 , C 4,8 e
D2,4 são os vértices de um retângulo.
m1 = declividade de AB
62
86
m1 2
m2 = declividade de BC
86
48
m2
m3 = declividade de DC
84
42
m3 2
m4 = declividade de AD
42
26
m4
Uma vez que:
1
2
1
2
m1 m3 AB // DC
m2 m4 BC // AD
m1 m2 1 AB BC
Ex.: 1.19 Dada a reta r com a equação 2 x 3 y 5 0 , encontre a equação da reta perpendicular a
r e que passa pelo ponto A 1,3 .
3 y 2 x 5
2
5
y x
3
3
Perpendicularidade:
y mx b
m1 m2 1
1
m1
m2
m
2
3
m1
3
2
3
x 1
2
2 y 6 3x 3
3x 2 y 9 0
y 3
y y1 m x x1
01 de fevereiro de 2010
Alex N. Brasil
Geometria Analítica e Álgebra Linear
17
Exercícios Numéricos
1.1. Encontre todos os números reais que satisfazem a desigualdade. Dê o intervalosolução e ilustre a solução sobre a reta numérica.
(a) x 2 4
(b) 1 x 2 x 2 0
(c) 3x 4 2
1.2. Resolva para x:
7x 4 x
R.: ,2 e 2,
R.: 1,1 2
R.: 2 3 ,2
R.: x 1 2 ,
x 2 3
1.3. Encontre todos os valores de x para os quais o número é real:
x 2 5x 4
R.: ,1 e 4,
1.4. Demonstre que o triângulo com vértices A(3,-6), B(8,-2) e C(-1,-1) é um triângulo
retângulo. Encontre a área do triângulo. (Sugestão: Use a recíproca do Teorema de
Pitágoras).
1.5. Os pontos (2,-2) e (-6,5) são as extremidades do diâmetro de um círculo. Ache o
centro e o raio do círculo.
R.: c 2, 3 2 , r 1 2 113
1.6. Prove que o triângulo cujos vértices são os pontos A(0,5), B(3,2) e C(-3,2) é
isósceles e calcule o seu perímetro.
1.7. Assinale cada um dos seguintes pares de pontos, desenhe a reta que eles
determinam e calcule seu coeficiente angular:
(a) (-3,1), (4,-1);
(b) (-5,2), (7,2);
(c) (2,7), (-1,-1).
R.: m 2 7
R.: m 0
R.: m 8 3
1.8. Assinale cada um dos seguintes conjuntos de três pontos e utilize os coeficientes
angulares para determinar, em cada caso, se os pontos formam um triângulo
retângulo:
(a) (2,-3), (5,2), (0,5);
(b) (8,2), (-1,-1), (2,-7).
R.: sim
R.: não
1.9. Ache a equação da reta:
(a)
(b)
(c)
(d)
(e)
(f)
(g)
(h)
Que passa por (2,-3) e tem coeficiente angular – 4;
Que passa por (-4,2) e (3,-1);
Que tem coeficiente angular 2/3 e coeficiente linear – 4;
Que passa por (2,-4) e é paralela ao eixo x;
Que passa por (1,6) e é paralela ao eixo y;
Que passa por (4,-2) e é paralela a x 3 y 7 ;
Que passa por (-4,3) e é paralela à reta determinada por (-2,-2) e (1,0);
Que passa por (-2,3) e tem inclinação 135º.
01 de fevereiro de 2010
Alex N. Brasil