Física
Elementar
Material
Didático
Equipe de Física:
(PCNA Março de 2017)
Alexandre Guimarães Rodrigues
(Coordenação)
José Benício da Cruz Costa
(Orientação)
Monitores:
Março 2017
Universidade Federal do Pará
Adrielle de Sousa Nascimento
Diego Ribeiro Pinto de Castro
Ingred Rodrigues da Silva
Marcel Almeida do Amaral
Mayara Gonçalves Costa
Odivaldo Barbosa Dias
Equipe de Professores
Alexandre Guimarães Rodrigues (Coordenação Geral)
Matemática:
Alessandra Macedo de Souza (Coordenação)
Química:
Shirley Cristina Cabral Nascimento (Coordenação)
Física:
Alexandre Guimarães Rodrigues (Coordenação)
Administrativo:
José Benício da Cruz Costa (Coordenação)
PCNA-FÍSICA ELEMENTAR
Lista de Figuras
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Triângulo Retângulo . . . . . . . .
Representação de um teodolito. . .
Edifı́cio e suas projeções . . . . . .
Lago e suas projeções . . . . . . .
Ciclo Trigonométrico em radianos.
Ciclo Trigonométrico em graus. . .
Triângulo para Lei dos Cossenos. .
Triângulo para Lei dos Senos. . . .
Representação de vetores paralelos,
ou seja, vetores que apresentam o
mesmo sentido e direção, apresentando ou não mesmo módulo. . . .
Representação de vetores negativos, ou seja, vetores que apresentam o mesmo módulo e direção
do vetor positivo dado e sentido
contrário. . . . . . . . . . . . . . .
Representação geométrica de dois
vetores. . . . . . . . . . . . . . . .
Representação de soma de dois vetores pela regra do paralelogramo [1].
Representação geométrica de dois
vetores perpendiculares. . . . . . .
Exemplo 2.1. . . . . . . . . . . . .
Vetores ~a e ~b no plano cartesiano. .
Regra do paralelogramo. . . . . . .
Representação de um vetor arbitrário e sua projeção sobre os eixos x e y. . . . . . . . . . . . . . .
Triângulo formado pelo vetor principal e suas componentes. . . . . .
Triângulo para as relações trigonométricas. . . . . . . . . . . . . .
Exemplo 2.2. . . . . . . . . . . . .
Exemplo 2.3. . . . . . . . . . . . .
Exercı́cio 4. . . . . . . . . . . . . .
Exercı́cio 5. . . . . . . . . . . . . .
Exercı́cio 6. . . . . . . . . . . . . .
Exercı́cio 7. . . . . . . . . . . . . .
Exercı́cio 9. . . . . . . . . . . . . .
Representação do vetor deslocamento de suas componentes x e y. .
Representação do vetor ~a em duas
dimensões, x e y. . . . . . . . . . .
Representação dos vetores ~a e ~b fornecendo o vetor resultante ~c, a partir de suas componentes. . . . . . .
Representação dos vetores ~a e ~b
somados fornecendo o vetor resultante ~c. . . . . . . . . . . . . . . .
31
8
8
9
9
10
10
11
11
32
33
34
14
35
14
36
14
14
37
15
15
15
15
38
16
16
16
17
17
17
18
18
18
18
39
40
18
19
20
20
41
Representação de um vetor resultante ~c formando um triângulo
retângulo com suas componentes. .
Representação da multiplicação de
um vetor por um escalar. . . . . .
Regra da mão direita. . . . . . . .
Quanto mais lisa a superfı́cie, mais
longe um disco desliza após tomar uma velocidade inicial.Se ele se
move em um colchão de ar sobre a
mesa (c) a força de atrito é praticamente zero, de modo que o disco
continua a deslizar com velocidade
quase constante (YOUNG. H. D;
FREEDMAN. Fı́sica 1-Sears & Zemansky. Mecânica. 12a . Edição.
Ed. Pearson) . . . . . . . . . . . .
Massa, aceleração e a segunda lei
de Newton. . . . . . . . . . . . . .
Duas forças F~1 e F~2 que atuam sobre um ponto A exercem o mesmo
efeito que uma força R dada pela
soma vetorial. . . . . . . . . . . . .
Achando os componentes do vetor
soma (resultante) R de duas forças
F~1 e F~2 . . . . . . . . . . . . . . . .
O projeto de uma motocicleta de
alto desempenho depende fundamentalmente da segunda lei de
Newton. Para maximizar a aceleração, o projetista deve fazer a
motocicleta ser mais leve possı́vel
(isto é, minimizar sua massa) e usar
o motor mais potente possı́vel (isto
é, maximizar a força motriz). . . .
Identificação das forças em ação,
quando uma mão puxa uma corda
amarrada a um bloco. a) Mão,
corda e bloco. b) Pares de ação e
reação. (As forças verticais não são
mostradas). . . . . . . . . . . . . .
Não são pares de ação e reação.
a) Essas forças não são um par de
ação e reação por que atuam no
mesmo corpo. b) Essas forças serão
iguais somente se a corda estiver em
equilı́brio ou se sua massa for desprezada. (As forças verticais não
são mostradas). . . . . . . . . . . .
A figura acima representa: a) um
esboço da situação a ser estudada.
b) as forças atuantes no corpo A. c)
a força atuante no corpo B. . . . .
3
20
22
23
28
30
30
31
31
32
32
32
PCNA-FÍSICA ELEMENTAR
42
43
44
45
46
47
48
49
50
a) Uma caixa sobe um plano inclinado, puxada por uma corda .
(b) As três forças que agem cobre
a caixa: a força da corda T a força
gravitacional Fq e a força normal
FN . (c) As componentes de Fq
na direção ao plano inclinado e na
direção perpendicular. . . . . . . .
Duas forças atuam sobre o bloco,
o seu peso P~ e a força normal F~N
exercida pela superfı́cie da mesa. .
(a) A força normal F~N é maior do
que o peso da caixa, pois a caixa
está sendo pressionada para baixo
com uma força de 11 N. (b) A força
normal é menor do que o peso, pois
há uma força de 11 N para cima que
sustenta parcialmente a caixa. . . .
A prática do hóquei no gelo depende
decisivamente do atrito entre os patins
do jogador e o gelo. Quando o atrito
é muito elevado, o jogador se locomove
muito lentamente; quando o atrito é
muito pequeno, o jogador dificilmente
evita sua queda. . . . . . . . . . . .
A área microscópica de contato entre
a caixa e o piso é apenas uma pequena
fração da área macroscópica da superfı́cie do tampo da caixa. A área microscópica é proporcional à força normal exercida entre as superfı́cies. Se
a caixa repousa sobre um de seus lados, a área microscópica aumenta, mas
a força por unidade diminui, de forma
que área microscópica de contato não
muda. Não importa se a caixa está de
pé ou deitada, a mesma força horizontal F aplicada é necessária para mantêla deslizando com rapidez constante
(PAUL A. TIPLER, GENE MOSCA,
2012). . . . . . . . . . . . . . . . .
Atrito Estático. . . . . . . . . . . .
Gráfico da força de atrito. . . . . .
(a) A força T~ está sendo aplicada à
extremidade direita de uma corda.
(b) a força é transmitida para
caixa. (c) Forças são aplicadas às
duas extremidades da corda. Estas
forças possuem mesmos módulos e
direções opostas (mesma direção e
sentidos contrários), (CUTNELL &
JOHNSON, 2012). . . . . . . . . .
A relação entre massa e peso. . . .
51
52
33
53
37
54
55
56
57
58
37
59
60
38
61
62
63
64
65
66
67
68
Em um movimento circular uniforme, tanto a aceleração, como a
força resultante são orientadas para
o centro do circulo. . . . . . . . . .
O que acontece quando a força orientada para o centro deixa de atuar
sobre um movimento circular? . . .
Indicação de referencial graduada
em metros . . . . . . . . . . . . . .
Reta secante a uma função f (x) . .
Gráfico de posição no tempo. . . .
Reta secante tendendo a uma tangente. . . . . . . . . . . . . . . . .
Reta horizontal de uma função
constante . . . . . . . . . . . . . .
Derivada indicando se a) f (x) é
crescente ou se b) f (x) é decrescente.
Na figura acima, c é máximo local e
d é mı́nimo local (f 0 (c) = f 0 (d) = 0).
Tabela representativa de derivada e
integral de modo sintético. . . . . .
Gráfico de aceleração no tempo. . .
Gráfico de velocidade no tempo. .
Gráfico da aceleração no tempo. .
Gráfico de uma curva qualquer. . .
Curva sendo aproximada grosseiramente por retângulos. . . . . . . .
Aproximação melhorada com o uso
de retângulos mais finos. . . . . . .
A variação no espaço é igual a área
do gráfico vxt . . . . . . . . . . . .
A variação no espaço é igual a área
do gráfico axt . . . . . . . . . . . .
38
39
40
40
41
4
42
42
51
53
54
54
55
56
56
57
57
58
58
58
58
59
60
60
PCNA-FÍSICA ELEMENTAR
Sumário
4
1 CIÊNCIAS, GRANDEZAS FÍSICAS
E UNIDADES
1.1 Objetivos de aprendizagem: . . . .
1.2 A Natureza da Fı́sica . . . . . . .
1.3 Grandezas e Dimensões . . . . .
1.4 Análise Dimensional . . . . . . .
1.5 Conversões de unidades . . . . .
1.6 Incertezas e Algarismos Significativos: . . . . . . . . . . . . . . .
1.7 Funções Trigonométricas Básicas
1.8 Cı́rculo trigonométrico . . . . . .
1.9 Lei dos Cossenos . . . . . . . . .
1.10 Lei dos Senos . . . . . . . . . . .
EXERCÍCIOS . . . . . . . . . . . . . .
2
ANÁLISE
BÁSICA
VETORIAL
13
Objetivos de aprendizagem: . . .
Diferenças entre escalares e vetores
Conceitos básicos de vetores . . .
Soma e subtração gráfica de vetores
Componentes de vetores . . . . .
Vetores unitários ou versores . .
Soma de vetores a partir de suas
componentes . . . . . . . . . . . .
2.8 Multiplicação de vetores . . . . .
2.9 Multiplicação de um vetor por
escalar . . . . . . . . . . . . . . . .
2.10 Multiplicação de um vetor por
um vetor . . . . . . . . . . . . . .
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.10.1 Produto escalar .
2.10.2 Produto vetorial
EXERCÍCIOS . . . . . . . .
PROBLEMAS ADICIONAIS
3
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
LEIS DE NEWTON
3.1
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.9
Objetivos de aprendizagem: . . .
Introdução . . . . . . . . . . . . .
Referencial do ponto de vista da
dinâmica . . . . . . . . . . . . . .
Primeira
lei
de
Newton
(Princı́pio da Inércia) . . . . . . .
Relação vetorial entre velocidade
e aceleração . . . . . . . . . . . .
Segunda lei de Newton . . . . . .
Relação entre força e aceleração
Terceira lei de Newton . . . . . .
Diagrama de corpo livre . . . . .
Objetivos de aprendizagem: . . .
Introdução . . . . . . . . . . . . .
Aplicações da primeira lei de
newton: partı́culas em equilı́brio
4.4 Aplicações da segunda lei de
newton: dinâmica das partı́culas
4.5 Forças de contato . . . . . . . . .
4.1
4.2
4.3
6
6
6
6
6
7
8
8
9
11
11
12
APLICAÇÕES DAS LEIS
DE NEWTON
36
4.5.1
4.5.2
4.5.3
4.5.4
Força normal . .
Forças de atrito .
Forças de tração
Massa e peso . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4.6 Dinâmica do movimento circular
EXERCÍCIOS . . . . . . . . . . . . . .
5
36
36
36
36
37
37
38
40
40
41
43
NOÇÕES DE CÁLCULO
DIFERENCIAL E INTEGRAL NA CINEMÁTICA 50
13
13
13
14
15
19
5.1
5.2
5.3
19
21
5.6
5.7
5.8
5.4
5.5
21
5.9
5.10
5.11
Objetivos de aprendizagem: . . .
Introdução: . . . . . . . . . . . . .
Uma breve discussão sobre referencial do ponto de vista da cinemática . . . . . . . . . . . . . .
5.3 Posição x deslocamento . . .
Velocidade vetorial média x velocidade escalar média . . . . . . .
Velocidade instantânea . . . . . .
Noções de cálculo diferencial . .
Aceleração vetorial média x Aceleração escalar média . . . . . . .
Aceleração instantânea . . . . . .
Noções de cálculo integral . . . .
Aplicação na cinemática . . . . .
21
21
23
GABARITO GERAL
24
25 REFERÊNCIAS BIBLIOGRÁFICAS
27
27
27
27
28
29
30
31
31
32
5
50
50
50
51
52
52
53
54
55
58
59
61
63
PCNA-FÍSICA ELEMENTAR
1
CIÊNCIAS,
GRANDEZAS
FÍSICAS E UNIDADES
1.1
Objetivos de aprendizagem:
• Entender o conceito de fı́sica e sua natureza.
• Conhecer as grandezas fundamentais e as unidades usadas pelos fı́sicos para medi-las.
GRANDEZAS FUNDAMENTAIS DA MECÂNICA
UNIDADE
SI
CGS
BE
Metro
Centı́metro
Pé
Comprimento
(m)
(cm)
(ft)
Quilograma
Grama
Slug
Massa
(Kg)
(g)
(sl)
Segundo
Segundo
Segundo
Tempo
(s)
(s)
(s)
Tabela 1: Relações entre os diversos sistemas de
• Como fazer a análise dimensional de uma unidades.
equação.
• Converter unidades e como não perder de
vista os algarismos mais significativos nos RELAÇÕES IMPORTANTES
seus cálculos.
1 m = 10 dm = 100 cm = 1000 mm
1 kg = 1000 g
• Como aplicar os conceitos básicos de trigono1
ton = 1000 kg
metria.
1 h = 60 min = 3600 s
1 min = 60 s
1.2
A Natureza da Fı́sica
A ciência e a engenharia se baseiam em
medições e comparações. Assim precisamos de
regras para estabelecer de que forma as grandezas devem ser medidas e comparadas, e de experimentos para estabelecer as unidades para essas
medições e comparações. A fı́sica é uma ciência
experimental, e assim como a quı́mica e a matemática, forma a base de todas as engenharias.
Nenhum engenheiro pode projetar uma tela plana
de TV, uma nave espacial, um reator ou até
mesmo uma ratoeira mais eficiente, sem antes entender os princı́pios básicos da fı́sica.
1.3
Grandezas e Dimensões
Os experimentos fı́sicos exigem medidas, e normalmente usamos números para descrever os resultados das medidas. Medir refere-se a comparar
uma grandeza com um padrão que é a unidade
de medida. Uma grandeza fı́sica descreve quantitativamente um conceito quando o exprime na
forma de número e em função de uma unidade de
medida.
Por exemplo, duas grandezas fı́sicas para
descrever você são a sua massa e a sua altura.
Para cientistas e engenheiros, em grande parte do
mundo, o sistema padrão utilizado é conhecido
como Sistema Internacional ou SI. No SI a
massa é medida em quilogramas (Kg) e a altura
(comprimento) em metros (m).Existem outros
sistemas como CGS e o sistema de Engenharia Britânico (BE) conforme exposto na Tabela 1.
1.4
Análise Dimensional
Em fı́sica, o termo dimensão é usado para se
referir à natureza fı́sica de uma grandeza. A preocupação com a dimensionalidade de uma grandeza
ou de uma fórmula antecede a questão da unidade
usada. Por exemplo, para medir a distância entre dois objetos podemos utilizar fita métrica graduada em centı́metro, decı́metro ou metro. Entretanto, ninguém discute que essa medida deverá
ser feita a partir de uma unidade de comprimento.
Em outras palavras, a análise dimensional é usada
para verificar relações matemáticas quanto à consistência das suas dimensões.
Na mecânica, parte da Fı́sica que envolve a cinemática e a dinâmica, a totalidade dos conceitos
básicos dessa área pode ser expressa em termos de
uma combinação de dimensões fundamentais. São
elas:
• Comprimento [L]
• Tempo [T]
• Massa [M]
Exemplo 1.1: Considere um carro que parte
do repouso e acelera até uma velocidade v em
um tempo t. Desejamos calcular a distância x
percorrida pelo carro, mas não temos a certeza
de se a relação correta é x = 12 .v.t2 ou x = 12 .v.t.
Podemos verificar as grandezas em ambos os
lados da equação para vermos se possuem as
6
PCNA-FÍSICA ELEMENTAR
mesmas dimensões da seguinte maneira:
Façamos o caso da conversão de velocidade de
km/h para m/s. Sabemos que 1 quilômetro pos1
2
Na equação x = 2 .v.t , aplicando as dimensões sui 1000 metros e que 1 hora possui 3600 segundos (60x60s). Logo, 1km/h = 1000m/3600s ≈
[L] e [T], teremos:
0, 2778m/s. Sabemos quanto vale 1km/h em m/s.
E
quanto vale 1m/s em termos de km/h? Vamos
[L]
2
[L] = [T
] .[T ] ou [L] = [L].[T ]
para a regra de três!
A dimensão do lado esquerdo da equação não
coincide com a dimensão do lado direito. Logo,
a relação não está correta, pois não faz sentido
trabalharmos com uma fórmula do tipo posição
= velocidade. Afinal, estamos medindo posição
ou velocidade? Daı́ a necessidade de que a dimensão do “lado esquerdo” da fórmula seja igual à
do “lado direito” e, caso seja composta por mais de
uma parcela, essas devem ter a mesma dimensionalidade entre si e a mesma compatibilidade com a
descrição da fórmula em questão. Portanto, todas
as fórmulas que utilizamos, independentemente do
contexto em questão, deve ter o dimensionamento
consistente. Caso contrário deve ser reanalisada
ou simplesmente descartada. Lembre-se disso ao
final das suas resoluções de problemas e exercı́cios!
Para a equação x = 21 .v.t temos:
1km/h —— 0, 2778m/s
x —— 1m/s
A leitura é feita da seguinte forma: 1km/h
vale 0,2778m/s. 1m/s (que ainda não sabemos
quanto vale em km/h) em termos de km/h vale
x (incógnita). Em seguida fazemos uma multiplicação em diagonal (repare que de um lado temos somente uma unidade (km/h) e do outro lado
com outra unidade (m/s)). Assim ficamos com:
1km/h.1m/s = x.0, 2778m/s
1km/h
x = 0,27778
= 3, 6km/h
Portanto, x, que é igual a 1 m/s escrito em
termos de unidade de velocidade em m/s vale 3,6
km/h.
A forma de montar uma regra de três é sempre
simples. Mas atenção! Fazer uma mudança de
unidades não altera a dimensão da grandeza que
A dimensão em ambos os lados coincidem, logo você está trabalhando!
essa equação está dimensionalmente correta.
Exemplo 1.2:
[L] =
1.5
[L]
[T ] .[T ]
ou [L] = [L]
Conversões de unidades
Uma vez que qualquer grandeza pode ser medida em diferentes unidades é importante saber
como converter um resultado expresso em uma
unidade para outra unidade. A conversão pode
envolver uma única dimensão, como por exemplo,
converter 1 km para metros , 1km = 103 m. Pode
também envolver mais de uma dimensão, como
converter velocidade dada em km/h para m/s.
Neste caso, precisamos expressar quilômetro em
metros e hora em segundos. Em todos os casos
de conversão de unidades pode-se afirmar que não
há nada mais envolvido que as operações de multiplicação e divisão. As regras de conversão podem ser sintetizadas a partir de um cálculo simples envolvendo regra de três. É necessário que
se diga, embora óbvio, que só é possı́vel converter
uma unidade para outra unidade quando sabemos
o quanto vale uma unidade de medida em termos
da outra e vice-e-versa.
O Sistema de unidades estadunidense é diferente do Sistema Internacional (Système National
d’Unités), que é utilizado no Brasil e na maioria dos paı́ses. Nos Estados Unidos, para medir massa, por exemplo, utiliza-se a unidade “libras”(pounds). Já no Brasil, geralmente se utiliza o “quilograma”. Para grandes medidas de
altura, os norte-americanos utilizam a unidade
“pés” (feet), enquanto que nós utilizamos “metros” ou “quilômetros”.
Imagine que durante seu perı́odo de graduação
você faça um intercâmbio acadêmico para os Estados Unidos e sua primeira aula seja de conversão
de unidades. Assim, determine quanto vale 3212ft
(feet) em metros. Obs.: 1ft=30,48cm=0,3048m
Estratégia de raciocı́nio:
1 ft = 0,3048m.
A pergunta é: quanto vale
7
PCNA-FÍSICA ELEMENTAR
3212ft expresso em metros? Vale x metros. É
o que queremos descobrir. Vamos montar nossa
regra de três!
1f t —— 0, 3048m
3212f t —— x
A regra de três foi montada corretamente.
Agora é só fazer a multiplicação em diagonal e
isolar o fator x.
3212ft.0,3048m = x.1ft
x = 979,0 m
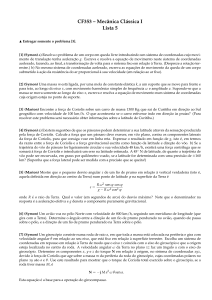
Figura 1: Triângulo Retângulo
sen θ =
ho
h , cos
θ=
ha
h , tan
θ=
ha
ho
o seno, o cosseno e a tangente são números sem
Não se esqueça de fazer o corte nas dimensões unidades (nem dimensões) porque cada um é a
também! ft do lado esquerdo corta com ft do lado razão entre os comprimentos de dois lados de um
direito da equação e a resposta é dada em metros, triângulo retângulo.
conforme desejamos.
Exemplo 1.3 :
1.6
Incertezas e Algarismos Significativos:
As medidas sempre envolvem incertezas. Em
muitos casos, a incerteza de um número não é
apresentada explicitamente. Em vez disso, ela é
indicada pelo número de dı́gitos confiáveis, ou algarismos significativos, do valor da medida. Por
exemplo, medimos a espessura da capa de um
livro e encontramos o valor 2,91mm, esse valor
apresenta três algarismos significativos. Com isto,
queremos dizer que os dois primeiros algarismos
são corretos, enquanto o terceiro dı́gito é incerto.
O último dı́gito está na casa dos centésimos, de
modo que a incerteza é aproximadamente igual a
0,01mm.
1.7
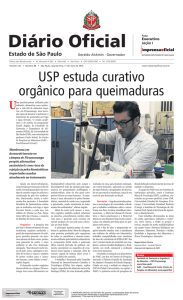
“A finalidade principal de um teodolito é a
medida de ângulos horizontais e verticais. Indiretamente, podem-se medir distâncias que, relacionadas com os ângulos verticais, possibilita obter tanto a distância horizontal entre dois pontos quanto à diferença de nı́vel entre os mesmos.”
(Fonte: Teodolitos e Nı́veis Ópticos – Verificação
e Ajustes, FERRAZ, A.S; ANTONINO, L.C.). A
Figura 2 mostra uma versão simplificada do Teodolito.
Funções Trigonométricas Básicas
A trigonometria é uma área da matemática
muito aplicada na fı́sica, sobretudo nos tipos de
problemas tratados pela mecânica. Em especial,
três funções trigonométricas básicas são mais utilizadas. São essas: o seno, o cosseno e a tangente de um determinado ângulo. Vamos definir essas funções a seguir a partir do triângulo
retângulo abaixo:
Pelo teorema de Pitágoras, determina-se que:
Figura 2: Representação de um teodolito.
Considere que um topógrafo precisa determinar
a
altura
de um edifı́cio para executar um projeto
h2 = h2o + h2a
de engenharia. Verifica-se que este edifı́cio produz
h = comprimento da hipotenusa de um uma sombra de 67,2 m de comprimento em um dia
triângulo retângulo
ensolarado. O ângulo, verificado com o auxı́lio do
h0 = comprimento do cateto oposto ao ângulo θ teodolito, entre os raios de sol e o chão é de θ=
ha = comprimento do cateto adjacente ao ângulo θ 50,0o , como mostrado na Figura 3. Qual a altura
do edifı́cio?
Em que:
Estratégia de raciocı́nio:
8
PCNA-FÍSICA ELEMENTAR
Figura 4: Lago e suas projeções
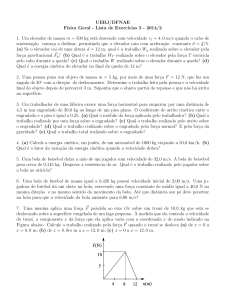
Figura 3: Edifı́cio e suas projeções
Desejamos determinar a altura do edifı́cio.
Para isso, analisamos as informações contidas no
triângulo retângulo sombreado da figura dada.
São elas: a altura como comprimento h0 do cateto
oposto ao ângulo θ e o comprimento da sombra é
o comprimento ha do cateto adjacente ao ângulo
θ. Sabemos que a razão entre o comprimento
do cateto oposto e o comprimento do cateto
adjacente é a tangente do ângulo θ que pode ser
usada para se determinar a altura do prédio.
Solução: Usamos a função tangente conhecida da seguinte maneira, com θ = 50,0o e ha =
67,2 m:
Desse modo:
tan θ =
ho
ha
Podemos observar que próximo a margem, os
comprimentos dos catetos oposto e adjacente do
triângulo retângulo formado na figura do lago são
ho =2,25 m e ha =14,0 m, em relação ao ângulo θ.
Após a identificação dessas informações, podemos
usar o arco tangente (tan−1 ) para determinar o
ângulo do item (a). Para determinar o item (b),
consideramos que os catetos opostos e adjacentes
passam a ser os mais afastados da margem onde
ho = d e ha =22,0 m. Assim, com o valor de θ
obtido no item (a), a função tangente pode ser
usada para encontrar o valor da profundidade
desconhecida. Considerando a forma com que a
profundidade do lago aumenta com a distância na
figura do lago, é de se esperar que a profundidade
desconhecida seja maior do que 2,25 m.
Solução: a) Usando a função arco tangente
conhecida, chegamos a:
2,25m
θ = tan−1 ( hhao ) = tan−1 ( 14,0m
) = 9, 13o
Assim:
b) Com θ = 9,13o , a função tangente pode ser
usada para determinarmos a profundidade desconhecida a uma distância maior da margem, onde
é determinado usando a ho = d e ha = 22,0 m. Conclui-se que:
ho = ha .tan θ = (67, 2m).(tan 50, 0o )
ho = (67, 2m).(1, 19) = 80, 0m
O valor de tan 50,0o
calculadora cientı́fica.
ho = ha .tanθ
d = 22, 0m.tan9, 13o = 3, 54m
Exemplo 1.4 :
A profundidade de um lago aumenta gradativamente com um ângulo θ, como indicado na
figura abaixo. Por questões de segurança, é necessário se determinar a profundidade do lago em
várias distâncias a partir da margem. Para fornecer informações a respeito da profundidade, um
guarda-vidas rema até uma distância de 14,0 m da
margem em direção ao interior do lago e solta uma
linha de pesca com um peso. Medindo o comprimento da linha, o guarda-vidas determina a profundidade como sendo igual a 2,25 m.
a) Qual o valor de θ?
b) Qual seria a profundidade d do lago a uma
distância de 22,0 m a partir da margem?
Estratégia de raciocı́nio:
Temos que 3,54m é maior que 2,25 m, o que já
era esperado.
1.8
Cı́rculo trigonométrico
Do ponto de vista matemático é muito útil descrever relações trigonométricas em termos da geometria analı́tica. Do ponto de vista da fı́sica, é
importante ter uma descrição matemática simples
e completa para o movimento circular, pois muita
coisa na natureza pode ser descrita em função
desse tipo de movimento. Muitos artefatos produzidos pelo homem (a própria roda e vários tipos de sistema de engrenagens, apenas para ficar em alguns exemplos) possuem formato circular. Várias situações e fenômenos (periódicos e
9
PCNA-FÍSICA ELEMENTAR
não periódicos) exigem descrição em termos de
Sigamos com a análise do cı́rculo trigomovimentos circulares (isso sem contar a ı́ntima nométrico fazendo referência à duas unidades de
relação entre movimentos oscilatórios harmônicos medida angular: radianos e graus.
e o movimento circular uniforme).
O cı́rculo trigonométrico é dividido em quatro
quadrantes, como segue: O I quadrante é constituı́do pelos ângulos que estão entre 0 e π2 ; o II
quadrante é constituı́do pelos ângulos que estão
entre π2 e π; o III quadrante comporta os ângulos
situados entre π e 3π
2 ;e o IV quadrante comporta
os ângulos situados entre 3π
2 e 2π. Em termos da
medida angular em graus, o I quadrante é delimitado entre 0 e 90o , o II entre 90o e 180o , o III entre
180o e 270o e o IV entre 270o e 360o .
Para finalizar, faremos uma brevı́ssima introdução da expressão: C = 2πR
Figura 5: Ciclo Trigonométrico em radianos.
O que ela traz de tão especial? C é o comprimento do cı́rculo. Sendo um comprimento, tratase, portanto de uma grandeza linear. Do lado direito da expressão temos 2π. No caso, isso significa
2π radianos. É, portanto, uma grandeza angular.
Desse modo temos uma relação entre uma
relação entre uma grandeza escalar (comprimento
C do cı́rculo) e uma grandeza angular (2π radianos). Outras expressões relacionando grandezas
lineares com grandezas angulares surgirão no contexto da dinâmica.
Figura 6: Ciclo Trigonométrico em graus.
IMPORTANTE!!
O cı́rculo trigonométrico é mais que o ponto
de partida para a descrição matemática do movimento circular (se fosse só isso já não seria
pouca coisa). O cı́rculo trigonométrico relaciona
um cı́rculo de raio unitário adimensional (por definição) e um plano cartesiano com coordenadas
(x,y). O centro do cı́rculo coincide com a origem
do plano cartesiano. A relação entre a localização
de um ponto no cı́rculo e o sistema de eixos coordenados é dada pela projeção ortogonal do ponto
em relação a cada eixo coordenado. A partir daı́
formam-se triângulos retângulos que servem de base para definir todas as definições
das funções trigonométricas. De maneira bem
simples: O eixo x é o eixo dos cossenos. O eixo y
é o eixo dos senos (ver figuras acima).
Para que essa relação esteja correta, necessariamente a medida angular deve estar
em radianos.
É muito importante destacar que ao falar em
ângulo, além de informar qual medida angular está
utilizando, temos também de ser cuidadosos
e explı́citos em relação a como a medida
angular é feita.
De maneira clara: Dizer simplesmente que o
ângulo é 30o não é preciso. Precisamos responder
o seguinte: O ângulo foi tomado a partir do semieixo Ox+ ou do semieixo Oy+? A medida angular
foi feita no sentido horário ou anti-horário?
10
PCNA-FÍSICA ELEMENTAR
O usual (mas não obrigatório) é fazer a
sen(α) = hb
abertura angular a partir do semieixo Ox+ e
h = sen(α). b (I)
tomar como sentido positivo a abertura em
sentido anti-horário (portanto o sentido horário No triângulo BCH, temos que:
é negativo). Observe que o sentido positivo do
cı́rculo trigonométrico é o sentido anti-horário, ensen(β) = ha
quanto que o sentido negativo é o sentido horário.
h = sen(β) . a (II)
IMPORTANTE!!
Cuidados com a medida angular: A especificação completa da medida angular envolve
a escolha do semieixo e o sentido em que a
abertura angular é realizada (horário ou antihorário).
De (I) e (II), obtemos:
sen(α).b = sen(β) . a
Ou
a
sen α
=
b
sen β
Assim, podemos concluir que:
1.9
Lei dos Cossenos
Para um triângulo qualquer podemos escrever
a lei dos cossenos.
a2 = b2 + c2 − 2.b.c.cos(α)
Onde α é o ângulo oposto ao lado a.
a
sen α
=
b
sen β
=
c
sen γ
Equação essa conhecida como Lei dos senos ou
Teorema dos senos.
Principais pontos do capı́tulo:
• Fı́sica é uma ciência experimental.
• Massa, Comprimento e Tempo são as grandezas fundamentais da mecânica. E suas unidades correspondentes no SI são: quilograma,
metro e segundo.
Figura 7: Triângulo para Lei dos Cossenos.
1.10
Lei dos Senos
O triângulo ABC, onde CH é a altura relativa
ao lado AB. Como mostrado na Figura 8.
• Toda equação deve ter o dimensionamento
correto. A análise dimensional é usada para
verificar equações matemáticas quanto a consistência das suas dimensões.
• A conversão de unidades é importante para o
estudo da fı́sica uma vez que qualquer grandeza fı́sica pode ser medida em diferentes unidades.
• Toda medição envolve um certo grau de incerteza, que pode ser expresso explicitamente
ou não.
• O cı́rculo trigonométrico, além de descrever matematicamente o movimento circular,
descreve relações trigonométricas importantes para a fı́sica, como o seno, cosseno e tangente.
Figura 8: Triângulo para Lei dos Senos.
No triângulo ACH, temos que:
• Para a descrição completa de uma medida angular devem ser especificados a escolha do semieixo e o sentindo em que a abertura angular
é realizada.
11
PCNA-FÍSICA ELEMENTAR
EXERCÍCIOS
1. A água utilizada na casa de um sı́tio é captada e bombeada do rio para uma caixad’água a 50m de distância. A casa está a
80m de distância da caixa-d’água e o ângulo
formado pelas direções caixa d’água-bomba e
caixa d’água-casa é de 60o . Pretende-se bombear água do mesmo ponto de captação até
a casa, quantos metros de encanamento são
necessários?
2. A figura mostra o trecho de um rio onde se
deseja construir uma ponte AB. De um ponto
P, a 100m de B, mediu-se o ângulo dos pontos
APB = 45o e do ponto A, mediu-se o ângulo
PAB = 30o . Qual o comprimento da ponte?
12
PCNA-FÍSICA ELEMENTAR
especial, a linguagem dos vetores! Essa linguagem
é muito utilizada por cientistas e por engenheiros
e, informalmente, até mesmo em conversas do dia
a dia. Se você já explicou a alguém como chegar
2.1 Objetivos de aprendizagem:
a um endereço usando expressões como “Siga por
• Entender a diferença entre grandezas escala- esta rua por cinco quarteirões e depois dobre à esres e vetoriais;
querda”, então você usou a linguagem dos vetores.
2
ANÁLISE
BÁSICA
VETORIAL
• Somar e subtrair vetores graficamente;
Alguém consegue imaginar o voo das aeronaves
• Aprender o que significam as componentes de sem uma determinação precisa de rotas aéreas?
um vetor e utilizá-las em cálculo de vetores; Rotas aéreas também são informações vetoriais.
Saber caracterizar e manipular vetores é pré• Aprender o que são vetores unitários, o que
requisito indispensável para a formação de qualos caracteriza e como aplicá-los;
quer engenheiro ou profissional da área de exatas.
• Utilizar as formas de multiplicação de vetores.
2.2
Diferenças entre escalares e vetores
Algumas grandezas fı́sicas como o tempo, temperatura, volume e massa podem ser descritas apenas por um valor numérico acompanhado da(s)
unidade(s) de medida da(s) grandeza(s) fı́sica(s)
correspondente(s). Este tipo de grandeza é chamado de grandeza escalar. Por exemplo: quando
alguém te pergunta qual a massa de um dado
corpo e você diz que é de 2 kg, a informação está
completa. Se alguém pergunta a hora e você responde que são 12 horas, a resposta está completa
também. A maneira de somar essas grandezas é
muito simples e em nada diferem da soma com
números como nós estamos acostumados (além do
fato de não podermos esquecer a unidade de medida da grandeza, é claro!). Mas há grandezas
que precisam de mais informação. Além do valor
numérico acompanhado da unidade de medida é
necessária, também, uma orientação espacial (uma
espécie de “para onde” aponta a grandeza). Muitas grandezas fı́sicas são assim. São chamadas
de grandezas vetoriais. O ente que representa
essas grandezas fı́sicas vetoriais e que possui tratamento matemático especı́fico é chamado de vetor. Deslocamento, velocidade, aceleração e forças como o atrito, peso e normal são
exemplos de grandezas vetoriais.
2.3
Conceitos básicos de vetores
A fı́sica lida com um grande número de grandezas que possuem amplitude e uma orientação
espacial para serem corretamente representadas.
Tais grandezas se combinam segundo regras
bem definidas. Para entender essas grandezas e
as regras segundo as quais elas se combinam é necessário compreender uma linguagem matemática
IMPORTANTE!
Grandezas vetoriais necessitam de mais
informação do que grandezas escalares. Essas
informações são: direção, sentido e módulo.
Grandezas vetoriais precisam de uma
orientação espacial.
Além disso, conforme já dissemos, grandezas
vetoriais se combinam (por soma e multiplicação)
segundo regras especı́ficas e bem definidas, ou seja,
caso uma grandeza “tenha pinta” de vetor, mas
não obedeça a essas regras, não é vetor!
Saber trabalhar com vetor é saber especificálo, determiná-lo (compô-lo ou decompô-lo) e
combiná-lo com outros vetores (ou escalares) seguindo essas regras bem definidas. Acredite, você
vai precisar disso na sua vida profissional.
Todo vetor possui módulo, direção e sentido.
A representação gráfica de um vetor é dada por
um segmento de reta orientado (uma seta). O
tamanho do segmento de reta representa o módulo
do vetor. A direção e o sentido da seta fornecem
a direção e o sentido do vetor. Podemos rotular
um vetor por uma letra com uma pequena seta
(para a direita) acima da mesma. Por exemplo, o
rótulo de um vetor que chamamos de A fica assim
~
representado: A
Outra opção é colocar a letra que designa o
vetor em negrito, porém faremos a opção pela pequena seta acima da letra. Antes de saber “fazer
as contas” para valer com os vetores é útil aprender a somar vetores graficamente. Ou seja, vamos
13
PCNA-FÍSICA ELEMENTAR
aprender a somar vetores por meio das suas representações em forma de segmentos de reta orientados (setas). As Figuras 9 e 10 mostram representações de vetores paralelos e negativos respectivamente.
Figura 11: Representação geométrica de dois vetores.
Figura 9: Representação de vetores paralelos, ou
~
seja, vetores que apresentam o mesmo sentido e e “faz de outro jeito”(b + ~a) dando a “mesma
coisa” (Equação 1) corresponde a um paralelodireção, apresentando ou não mesmo módulo.
gramo. Convença-se disso antes de seguir adiante!
Figura 10: Representação de vetores negativos, ou
seja, vetores que apresentam o mesmo módulo e
direção do vetor positivo dado e sentido contrário.
2.4
Figura 12: Representação de soma de dois vetores
Soma e subtração gráfica de vetores pela regra do paralelogramo [1].
Suponha que uma partı́cula sofra um deslocamento ~a e depois um deslocamento ~b, conforme
mostra a Figura 11. O que é o vetor ~a +~b? Fisicamente corresponde ao deslocamento total sofrido
pela partı́cula. Visualmente falando, o vetor resultante ~a+~b é o vetor que “fecha” o polı́gono, ou seja,
é o segmento de reta orientado que vai da origem
do vetor ~a até a extremidade (“flecha”) do vetor ~b
conforme mostra a Figura 11. O polı́gono é feito
“arrastando” o vetor, sem mudar a direção deste
vetor, até a extremidade do outro vetor (Este processo segue sucessivamente se tivermos mais de
dois vetores até incluir todos os vetores. Como
veremos, não importa a ordem que você escolhe
para fazer o polı́gono). Uma propriedade fundamental da soma de dois vetores é que a ordem em
que os vetores são somados não importa.
~a + ~b = ~b + ~a
(Lei comutativa)
(1)
Quando existem mais de dois vetores podemos
agrupá-los em qualquer ordem para somá-los geometricamente. Assim, se queremos somar os vetores ~a, ~b e ~c podemos primeiro somar ~a e ~b e depois
somar o resultado a ~c e também podemos somar
primeiro os vetores ~b e ~c e depois somar o resultado
ao vetor ~a.
(~a + ~b) + ~c = ~a + (~b + ~c)
(2)
(Lei associativa)
Quando dois vetores são perpendiculares entre
si, na Figura 13 podemos encontrar usando o teorema de Pitágoras, o módulo do vetor resultante.
| ~a + ~b |=
q
| ~a |2 + | ~b |2
(3)
Exemplo 2.1: De acordo com os vetores da Figura
14, mostrar, num gráfico em escala, um representante do vetor ~a − ~b.
Podemos também somá-los construindo um paralelogramo (lembramos que um paralelogramo é
Estratégia de raciocı́nio: Primeiramente,
um quadrilátero de lados opostos paralelos). Gra- devemos escolher um eixo coordenado e indicar o
ficamente falando, esse “faz de um jeito”(~a + ~b) sentido positivo desse eixo, Figura 15.
14
PCNA-FÍSICA ELEMENTAR
Figura 16: Regra do paralelogramo.
Figura 13: Representação geométrica de dois vetores perpendiculares.
2. Dados os vetores da Figura 15, mostrar, num
gráfico em escala, um representante do vetor:
a) ~b − ~a b) −~b − ~a c) 2~a − 3~b
3. Dado os vetores ~a = (4, 1) e ~b = (2, 6), faça
um esboço gráfico dos vetores: a) ~a + ~b b)
2~a c) 2~a − ~b
2.5
Figura 14: Exemplo 2.1.
Figura 15: Vetores ~a e ~b no plano cartesiano.
Podemos enxergar o vetor que se pede da seguinte forma: ~a + (−~b). Perceba que o sinal negativo implica na inversão do vetor ~b em relação
ao eixo “x” positivo (ver Figura 10). Ou seja, não
alteramos a direção do vetor, mas apenas o seu
sentido. Usando a regra do paralelogramo obtemos o vetor ~a − ~b conforme mostra a Figura 16.
Antes de prosseguirmos no assunto, sugerimos
que você resolva as questões a seguir.
1. Considerando o plano xz, construa, graficamente, os seguintes vetores: ~a = (2, −1), ~b =
(3, 2), ~c = (1, 5), d~ = (−1, −2) e ~e = (−2, 3).
Componentes de vetores
Uma componente de um vetor é a projeção
do vetor sobre um eixo. A afirmação sobre componentes nos permite fazer uma pergunta: Qual eixo? Perceba que precisamos
definir esse eixo! Bem, para projetar sobre
um eixo, precisamos definir um eixo coordenado, e esse é um dos passos para estabelecer um sistema de referência de eixos coordenados (chamamos simplesmente de sistema
de coordenadas). Precisamos de uma origem
para o sistema de coordenadas e precisamos
especificar qual é o sentido positivo de cada
eixo coordenado (lembre-se que para cada
direção há dois sentidos). Os eixos se cruzam
formando um ângulo de 90o , logo, eles são
perpendiculares (sempre trabalharemos com
sistemas de eixos perpendiculares). No momento focaremos nossa discussão em um sistema de coordenadas fixo chamado de sistema
de coordenadas cartesiano (inicialmente para
o plano, ou seja, precisaremos de duas coordenadas).
Em um sistema cartesiano normalmente a
abscissa (horizontal) é o eixo x (coordenada
x) e a ordenada (vertical) é designada pelo
eixo y (coordenada y). Mas veja bem! Não
é obrigatório que o eixo x seja horizontal e o
eixo y seja na vertical. Muitas vezes essa escolha (que é a usual) é útil, mas não é uma
regra geral. A escolha depende do problema
que você estiver analisando. Faça a escolha
15
PCNA-FÍSICA ELEMENTAR
que simplifique a sua vida, ou seja, faça escolhas que tornem as contas mais fáceis!
Na figura 17, visualizamos o vetor ~a e sua
projeção no eixo x e no eixo y. Vale ressaltar que ax e ay são escalares que podem
ser positivos ou negativos (a depender da orientação do vetor em relação à orientação do
sistema de coordenadas escolhido).
Figura 17: Representação de um vetor arbitrário
Muito bem! Já vimos que para projetar e sua projeção sobre os eixos x e y.
um vetor precisamos escolher um sistema de
coordenadas para projetar o vetor sobre os
eixos em questão. Para cada escolha de sistema de coordenadas encontraremos um par
de componentes correspondente do vetor. Temos ainda um ponto muito importante para
falar para você. Não é qualquer projeção
do vetor sobre o eixo que corresponde
à componente do vetor em relação ao
eixo. Somente a projeção ortogonal ao
eixo (ou seja, perpendicular ao eixo)
corresponde à componente do vetor.
Isso é muito importante! Toda projeção
corresponde à relações entre triângulos Figura 18: Triângulo formado pelo vetor principal
retângulos. Você deve estar lembrado que e suas componentes.
as funções trigonométricas seno e cosseno envolvem relações em um triangulo retângulo.
Com base no triângulo da Figura 18, poÉ por isso que funções seno e cosseno semdemos encontrar as relações trigonométricas
pre vão aparecer em problemas de projeção
da Equação 4.
(recomendamos que você reveja as seções 1.7
e 1.8 do capı́tulo anterior).
Uma observação, prezado leitor. Estabelecer corretamente um sistema
de coordenadas é fundamental para
estabelecer um referencial a partir do
qual vamos poder medir posições e
velocidades de um corpo. Não temos
intenção que você aprenda tudo agora. O Figura 19: Triângulo para as relações trigoestudo do referencial é algo muito sutil e nométricas.
voltaremos a falar sobre isso nos contextos
de dinâmica e também no de cinemática.
CO
CA
CO
cos θ =
tg θ =
(4)
sen θ =
H
H
CA
IMPORTANTE!
(Relações trigonométricas)
Só faz sentido falar em componentes de um
vetor uma vez que o sistema de coordenadas
em que o vetor será decomposto já tenha sido
Deste modo, obtemos:
escolhido de maneira explı́cita.
ax =| ~a | .cos θ e ay =| ~a | .sen θ
16
(5)
PCNA-FÍSICA ELEMENTAR
Sendo θ o ângulo que o vetor ~a faz com
o semieixo x positivo e | ~a | é o modulo do
vetor.
Uma vez que um vetor tenha sido decomposto em relação a um conjunto de eixos, as
componentes podem ser usadas no lugar do
vetor, assim:
| ~a |=
q
ax 2 + ay 2 e tg θ =
ay
ax
(6)
Exemplo 2.2: Quais são as componentes
x e y do vetor ~a? Seja | ~a |= 5, 0m e o ângulo
θ = 30o .
Figura 21: Exemplo 2.3.
Estratégia de raciocı́nio: Novamente,
lançamos mão das relações trigonométricas,
com base nos triângulos retângulos em
questão, para encontrar as seguintes relações:
sen θ =
ax
| ~a |
cos θ =
ay
| ~a |
Portanto,
ax = 8.sen30o = 4m
Figura 20: Exemplo 2.2.
Estratégia de raciocı́nio: Usaremos
as relações trigonométricas com base nos
triângulos retângulos em questão.
sen θ =
ay
| ~a |
cos θ =
ax
| ~a |
ay = 8.cos30o = 6, 92m
Vamos exercitar mais um pouco o
conteúdo até aqui aprendido. A ideia é que
você exercite a decomposição de vetores para
escolhas não usuais de sistemas coordenados.
4. Quais são as componentes x e y do vetor ~a na
Figura 22? Seja | ~a |= 5, 0m e θ = 50o .
Portanto,
ax =| ~a | .cos θ e ay =| ~a | .sen θ
ax = 5.cos30o = 4, 33m
ay = 5.sen30o = 2, 5m
Figura 22: Exercı́cio 4.
Exemplo 2.3: Quais são as componentes x
~ A Figura 21 mostra qual foi
e y do vetor A?
a escolha adotada para os eixos x e y. Considere | ~a | = 8m e θ = 30o .
5. Quais são as componentes x e y do vetor ~a
na Figura 23? Seu módulo | ~a |= 6, 50m e o
ângulo θ = 45o .
17
PCNA-FÍSICA ELEMENTAR
Figura 26: Exercı́cio 9.
Figura 23: Exercı́cio 5.
6. Quais são as componentes x e y do vetor ~a
na Figura 24? Seja | ~a |= 8, 0m e o ângulo
θ = 60o .
Exemplo 2.4: Um vetor deslocamento d
possui um módulo | d~ |= 175, 0m e uma inclinação de 50,0o , em relação ao eixo dos x
como mostrado na figura abaixo. Determine
as componentes x e y deste vetor.
Figura 24: Exercı́cio 6.
Figura 27: Representação do vetor deslocamento
7. Quais são as componentes x e y do vetor ~a de suas componentes x e y.
na Figura 25? Seu módulo | ~a |= 9, 0m e o
ângulo θ = 120o .
Estratégia de raciocı́nio: De acordo
com o nosso conhecimento de trigonometria básica, podemos observar o triângulo
retângulo formado pelo vetor d e suas componentes x e y. Isto nos permite aplicar as
funções trigonométricas seno e cosseno para
determinar as componentes em questão.
Figura 25: Exercı́cio 7.
Solução: A componente y pode ser obtida
usando o ângulo de 50,0o e a seguinte relação:
8. Um pequeno avião decola do aeroporto de
Belém em um dia chuvoso e é avistado mais
tarde a 300 km de distância, em um curso que
faz um ângulo de 30o a partir de leste no sentido anti-horário. A que distância a leste e ao
norte do aeroporto está o avião no momento
em que é avistado?
9. a) Quais os sinais das componentes x de
~a, ~b e ~c na Figura 26? b) Quais são os sinais
das componentes y de ~a, ~b e ~c? c) Quais são
os sinais das componentes x e y de ~a + ~b + ~c?
Dados: | ~a |= 8N, | ~b |= 7N e | ~c |= 10N .
sen θ =
y
| d~ |
y =| d~ | .sen θ = (175m)(sen50, 0o ) = 134m
Seguindo o mesmo raciocı́nio, a componente x pode ser obtida da seguinte maneira:
cos θ =
x
| d~ |
x =| d~ | .cos θ = (175m)(cos50, 0o ) = 112m
18
PCNA-FÍSICA ELEMENTAR
Outra forma de determinar as componentes é por meio do ângulo α. Observe:
Sabemos que:
cosα =
y
| d~ |
Desse modo:
y =| d~ | .cosα = (175m)(cos40, 0o ) = 134m
x =| d~ | .senα = (175m)(cos40, 0o ) = 112m
O valor de 40,0o foi encontrado por meio
do conhecimento da soma de ângulos internos de um triângulo que tem que ser igual a
180,0o .
2.6
Vetores unitários ou versores
Outro método de expressar componentes
vetoriais consiste em usar vetores unitários.
Mas, para que usar vetores unitários? Ou
ainda, o que são vetores unitários? Para
que eles servem? Quais são as suas caracterı́sticas? Um vetor unitário também conhecido como versor é um vetor que possui um
módulo unitário e é adimensional. Possui a
seguinte notação:
Figura 28: Representação do vetor ~a em duas dimensões, x e y.
temos as informações necessárias para determinar o vetor resultante. Esse é um ponto
essencial ao se trabalhar com vetor. Faremos
um exemplo para dois vetores. Mas preste
atenção! Esse método pode ser utilizado para
soma envolvendo uma quantidade qualquer
de vetores. Portanto, você estará aprendendo
um método geral, muito útil e importante
para a sua formação.
Considere os vetores ~a e ~b e suas respectivas componentes ax , ay e bx , by .
Logo, podemos escrever os vetores em termos de seus versores da seguinte forma:
ı̂ é um vetor unitário adimensional de comprimento 1 que aponta no sentido positivo do
eixo dos x.
~a = ax ı̂ + ay ̂
̂ é um vetor unitário adimensional de comprimento 1 que aponta no sentido positivo do
eixo dos y.
Os vetores ~a e ~b estão sendo representados
na Figura 29.
Não devemos esquecer que só podemos somar vetores que estejam na mesma direção
ou eixo coordenado! (lembramos que se os
vetores estiverem em sentido contrário terão
sinais contrários, necessariamente). No nosso
caso, analisando o eixo x notamos que, sobre o eixo, encontram-se as componentes ax e
bx pois ambas estão orientadas pelo versor ı̂!
Devemos extender o mesmo raciocı́nio para o
eixo y.
Ou seja, para cada coordenada temos um e
somente um versor associado. O versor serve
para indicar o sentido positivo da coordenada
a qual o versor está associado. Lembre-se
disso, ok?
2.7 Soma de vetores a partir de
suas componentes
Uma forma de somar vetores é combinar
suas componentes eixo por eixo. Depois de
encontrar as componentes do vetor resultante
~b = bx ı̂ + by ̂
Portanto, temos:
~c = cx ı̂ + cy ̂ = (ax + bx )ı̂ + (ay + by )̂ (7)
19
PCNA-FÍSICA ELEMENTAR
eixo. Tendo a resultante para cada eixo aplicamos o teorema de Pitágoras para encontrar
o módulo do vetor resultante. Para encontrar
a orientação espacial do vetor resultante (ou
seja, a direção e o sentido do vetor) faremos
uso das relações trigonométricas seno, cosseno
ou tangente (a depender em relação a quem
vamos querer especificar a direção do vetor e
se vamos querer usar a informação do módulo
do vetor em si ou das suas componentes).
Solução: Com as informações dadas na
figura, montamos a seguinte tabela:
Figura 29: Representação dos vetores ~a e ~b fornecendo o vetor resultante ~c, a partir de suas componentes.
Exemplo 2.5: Um corredor se desloca 145
m numa direção nordeste, que faz 20o com a
direção norte tomado no sentido horário (representado pelo vetor deslocamento ~a) e depois 105 m em uma direção sudeste fazendo
35,0o com a direção leste também no sentido horário (representado pelo vetor deslocamento ~b). Determine o módulo, a direção
e o sentido do vetor resultante para a soma
destes dois deslocamentos.
Vetor
~a
~b
~c
Componente x
ax = (145m)
.sen20o
= 49, 6m
bx = (105m)
.cos35o
= 86m
cx = ax + bx
= 135, 6m
Componente y
ay = (145m)
.cos20o
= 136m
by = −(105m)
.sen35o
= −60, 2m
cy = ay + by
= 76m
Tabela 2: Componente de vetores.
A terceira linha da tabela fornece as componentes x e y do vetor resultante ~c : cx =
ax + bx e cy = ay + by . A figura seguinte
nos mostra o vetor resultante ~c e suas componentes vetoriais. E aplicando o teorema
de Pitágoras no triângulo retângulo fornecido
pela mesma, temos:
Figura 30: Representação dos vetores ~a e ~b somados fornecendo o vetor resultante ~c.
Estratégia de raciocı́nio: A Figura 30 Figura 31: Representação de um vetor resultante
nos mostra os vetores ~a e ~b. Suponhamos que ~c formando um triângulo retângulo com suas como eixo y positivo coincide com a direção norte ponentes.
e o eixo x positivo com o sentido leste. O primeiro passo é decompor cada um dos vetores
nos eixos escolhidos para compor o sistema
Desse modo:
q
q
de coordenadas. Com isso achamos as com| ~c |= cx 2 + cy 2 = (135, 6m)2 + (76m)2
ponentes ax , bx e ay , by . Em seguida fazemos
a soma para determinar a resultante em cada
| ~c |= 155, 4m
20
PCNA-FÍSICA ELEMENTAR
Pergunta importante: em relação a
quem nós vamos especificar a orientação do vetor?
Se usarmos uma
bússola, normalmente é feito em relação à
direção norte. Em relação ao sistema
cartesiano, normalmente a orientação é
dada em relação ao semieixo x positivo
(mas não obrigatoriamente). Portanto, em
relação a essa escolha, o ângulo θ que ~c faz
com o eixo x é:
θ = tg −1
cy
cx
= tg −1
76m
135, 6m
2.9 Multiplicação de um vetor por
escalar
Podemos multiplicar um vetor arbitrário ~a
por um escalar (número) w. Dessa operação
obtemos um vetor resultante ~r com as seguintes caracterı́sticas:
= 29, 3o
a partir de x (+) no sentindo antihorário.
~r = ~a.w
(8)
| ~r |=| ~a | .w
(9)
• O módulo do vetor resultante é o módulo
que resulta da multiplicação do módulo
de ~a vezes w.
• A direção do novo vetor é a mesma.
Lembre-se! Para encontrar o valor da componente do vetor resultante você deve somar
a contribuição de todos os vetores. As componentes podem ser positivas ou negativas. Se a
projeção de um dado vetor sobre um eixo tiver orientação contrária a que foi estabelecida
como positiva ela entrará com sinal negativo
na soma.
• A dimensão do vetor ~r é igual a dimensão do vetor ~a multiplicada pela dimensão do escalar w.
Sugerimos neste momento que você, leitor,
faça as questões a seguir:
2.10 Multiplicação de um vetor por
um vetor
10. Dados os vetores ~a = 2ı̂ + 3̂, ~b = ı̂+̂ e ~c =
−4ı̂ + 2̂. Calcule:
a) ~a + ~b b) ~a + ~c c) ~a − ~b
• O sentido de ~r é o mesmo de ~a se w for
positivo e sentido oposto se w for negativo.
11. Com base nos vetores da 10a questão, calcule:
a) 2~a − ~b b) ~b + ~c c) ~a + ~b + ~c
Existem duas formas de multiplicar um vetor por um vetor: uma forma conhecida como
produto escalar que resulta em um escalar, a
outra conhecida como produto vetorial que
resulta em um vetor.
12. Esboce, no gráfico xy, os vetores da questão
10.
2.10.1
13. Esboce, no gráfico xy, os vetores da questão
11.
2.8
Multiplicação de vetores
No inı́cio do capı́tulo dissemos que vetores
se combinam segundo regras bem definidas de
soma e multiplicação. Já vimos as relações
de soma. Fica então a pergunta: Como vetores se combinam segundo regras de
multiplicação? Multiplicar um vetor por
um escalar é fácil. Significa que estamos alterando o módulo (intensidade) do vetor sem
mudar a direção do mesmo. Temos ainda
duas formas de multiplicar vetores entre si.
Ambas são úteis e muito importantes. Vejamos!
Produto escalar
A multiplicação de um vetor por outro vetor resultando em um escalar é denominada
produto escalar. Dados dois vetores ~a e ~b, o
produto escalar é escrito como ~a.~b e definido
pela equação:
~a.~b =| ~a | . | ~b | .cos θ
(10)
Vemos, portanto, que o produto escalar
entre dois vetores depende dos módulos dos
vetores, mas também depende da angulação
entre dois vetores (e a dependência é com a
função cosseno. Lembre-se disso!). Isso quer
dizer que o produto escalar entre dois vetores de módulo muito grande pode ser zero, a
depender da angulação entre eles.
21
PCNA-FÍSICA ELEMENTAR
IMPORTANTE!
Se o ângulo θ entre dois vetores é 0o , a
componente de um vetor em relação ao outro é
máxima. Se o ângulo é 90o , a componente de
um vetor em relação ao outro é nula.
Figura 32: Representação da multiplicação de um
vetor por um escalar.
Baseado nisso responda: Qual ângulo entre os vetores faz com o que o produto escalar
dê zero, independente dos módulos dos vetores? Observe a Figura 32.
Repare que | ~a | .cos θ corresponde exatamente à projeção do vetor ~a sobre o vetor
~b. É exatamente disso que se trata o produto
escalar!
Podemos escrever a equação que define o
produto escalar separando as componentes da
seguinte forma:
~a.~b = (| ~a | .cos θ). | ~b |= (cos θ. | ~b |). | ~a |
Vemos, portanto que a propriedade comutativa se aplica ao produto escalar. Desse
modo,
~a.~b = ~b.~a
Em três dimensões (x, y, z ) o produto escalar dos vetores ~a e ~b, escritos em termos de
seus vetores unitários, assume a forma:
~a.~b = (ax ı̂ +ay ̂ +az k̂ ).(bx ı̂ +by ̂ +bz k̂ ) (11)
Exemplo 2.6: Qual é o ângulo θ entre ~a =
3, 0ı̂ − 4, 0̂ e ~b = −2, 0ı̂ + 3, 0k̂ ?
Estratégia de raciocı́nio: Sabemos que
o ângulo entre dois vetores aparece na definição de produto de escalar (Equação 10).
Solução: Sabemos que | ~a | é o módulo
do vetor ~a, dado por:
q
| ~a |=
(3, 0)2 + (−4)2 = 5, 0
E que | ~b | é o módulo do vetor ~b dado por:
| ~b |=
q
(−2)2 + (3, 0)2 = 3, 61
Podemos calcular o produto escalar escrevendo os vetores em termos dos vetores
unitários e aplicando a propriedade distributiva:
~a.~b = (3, 0ı̂ − 4, 0̂).(−2, 0ı̂ + 3, 0k̂ )
~a.~b = (3, 0ı̂).(−2, 0ı̂) + (3, 0ı̂).(+3, 0k̂ ) +
(−4, 0̂).(−2, 0ı̂) + (−4, 0̂).(+3, 0k̂ )
Aplicaremos a propriedade distributiva na
Equação 11. Não é surpresa para ninguém
que as direções x, y, z são ortogonais entre
si. Portanto os versores relacionados a essas direções são ortogonais entre si. Sabendo
que os versores possuem módulo unitário e
utilizando a expressão (10) que define o produto escalar demonstre que ı̂.ı̂=̂.̂=k̂ .k̂ = 1
e ı̂.̂=̂.k̂ = k̂ .ı̂= 0 Usando essas informações
no produto da expressão (11), obtemos:
~a.~b = ax .bx + ay .by + az .bz
De acordo com o produto escalar
Logo, ~a.~b = −6, 0.
Substituindo todos os resultados encontrados na equação do produto escalar, obtemos,
−6, 0 = (5, 0).(3, 61).cos θ
(12)
θ = cos
−1
−6, 0
= 109o
(5, 0).(3, 61)
22
PCNA-FÍSICA ELEMENTAR
Chegou o momento! Vamos exercitar o
conteúdo até aqui aprendido.
14. Calcular o ângulo entre os vetores ~a = (1, 1, 4)
e ~b = (–1, 2, 2).
15. Dados os vetores ~a = 3ı̂ + 2̂, ~b = 2ı̂ + ̂ e
~c = −4ı̂ + 2̂. Calcule o produto escalar:
a) ~a.~b, b) ~a.~c e c) ~b.~c
16. Com base na questão 15, calcule o produto
escalar:
a) (~a + ~b).~a, b) (~a + ~b).~b e c) (~a + ~b).~c
2.10.2
Produto vetorial
A multiplicação de um vetor por outro vetor resultando em um terceiro vetor é denominada produto vetorial. Dados dois vetores
~a e ~b, o produto vetorial é escrito como ~a × ~b.
O módulo do vetor ~c obtido pelo produto vetorial entre os vetores ~a e ~b é dado por
| ~c |=| ~a | . | ~b | .sen θ
(13)
Sendo θ o menor ângulo formado entre os vetores dados, uma vez que sen θ e
sen(360o –θ) apresentam sinais opostos. O
produto ~a × ~b é lido como “ ~a vetor ~b”.
A direção do vetor resultante ~c é perpendicular ao plano definido por ~a e ~b. O seu
sentido pode ser determinado pela Regra da
Mão Direita. Superponha as origens de ~a
e ~b sem mudar suas orientações. Já falamos
que a direção do vetor resultante ~c é perpendicular ao plano definido por ~a e ~b. A receita
para determinar o sentido de ~c é a seguinte.
Vá de ~a para ~b pelo menor percurso angular
entre os dois vetores. Quatro dedos da sua
mão direita fazem o menor percurso angular
de ~a para ~b e o dedo polegar estendido indica
o sentido do vetor resultante. Se fizermos o
mesmo percurso angular, mas agora de ~b para
~a, o sentido do vetor resultante indicado pelo
dedo polegar extendido é invertido conforme
indicado na Figura 33 como a regra da mão
direita nos fornece de forma clara sobre as caracterı́sticas do produto vetorial.
Isso traz uma importante consequência.
Observamos que o produto vetorial entre vetores não é comutativo, ou seja, ~a ×~b 6= ~b ×~a.
Figura 33: Regra da mão direita.
Por isso que o sentido do vetor resultante é
invertido quando invertemos a ordem do produto (o módulo do vetor resultante é o mesmo
para os dois casos). Portanto, ~a ×~b = −~b ×~a.
Vamos então resumir a toda a informação do
produto vetorial entre vetores numa tabela a
seguir.
Para finalizar!
Vamos exercitar o
conteúdo até aqui aprendido.
17. Dados os vetores ~a = 2ı̂ − ̂, ~b = ı̂ + ̂ + k̂ e
~c = −2ı̂ + k̂ , determine as expressões:
a) ~a ×~b, b) ~c ×~b, c) ~a × (~b ×~c) e d) (~a ×~b) ×~c
Principais pontos do capı́tulo:
• Grandezas vetoriais, diferentemente das
grandezas escalares que precisam apenas
de um módulo para serem descritas, precisam de uma orientação espacial.
• Grandezas vetoriais se combinam
usando regras de soma vetorial.
• Soma vetorial também pode ser feita
usando componentes de vetores.
23
PCNA-FÍSICA ELEMENTAR
PRODUTO VETORIAL ~c = ~a × ~b
| ~c |=| ~a | . | ~b | .sen θ (função dos
módulos dos vetores ~a e
MÓDULO
~b e do ângulo entre eles)
Perpendicular ao plano
DIREÇÃO
formado pelos vetores ~a e ~b
Convencionado pela regra da
mão direita. Quatro dedos
vão de ~a para ~b, pelo menor
SENTIDO
percurso angular e o dedo
polegar indica o sentido do
vetor resultante.
Tabela 3: Propriedades do vetor ~c = ~a × ~b
IMPORTANTE!
~
Se ~a e b são paralelos ou antiparalelos,
~a × ~b = 0. E o módulo de ~a × ~b é máximo
quando ~a e ~b são perpendiculares.
• A decomposição de vetores é feita
utilizando as funções trigonométricas
básicas.
• Um vetor unitário tem módulo igual a
1, é adimensional e tem a função de descrever uma direção no espaço.
• O produto escalar entre dois vetores é
uma grandeza escalar. Enquanto que o
produto vetorial é uma grandeza vetorial orientada sempre perpendicular ao
plano formado pelos vetores multiplicados e com sentido definido pela regra da
mão direita.
EXERCÍCIOS
1. Determine (a) a soma de ~a + ~b, em termos
de vetores unitários para ~a = 4ı̂ + 3̂ e ~b =
−13ı̂ + 7̂. Determine (b) o módulo e (c) a
orientação de ~a + ~b.
2. Um vetor pode ter módulo igual a zero se uma
de suas componentes for diferente de zero?
3. É possı́vel que a soma dos módulos de dois
vetores seja sempre igual à soma destes dois
vetores?
4. Você pode ordenar os acontecimentos no
tempo. Por exemplo, o evento b pode proceder ao evento c, porém seguir o evento a,
dando a ordenação temporal do evento a, b e
c. Consequentemente, existe um sentido para
o tempo, distinguindo o passado, o presente
e o futuro. Será que o tempo, então, é uma
grandeza vetorial? Se não, por quê?
5. O produto escalar pode ser uma quantidade
negativa? Justifique.
6. a) Sendo ~a.~b = 0, podemos concluir daı́ que
os vetores são perpendiculares entre si? b) Se
~a.~b = ~a.~c, segue-se daı́ que ~b = ~c?
7. Se ~a × ~b = 0, ~a e ~b devem ser paralelos entre
si? O inverso é verdadeiro?
8. Considere dois deslocamentos, um igual a 3
m e um outro de módulo igual a 4 m. Mostre como os vetores deslocamento podem ser
combinados de modo a fornecer um deslocamento resultante de módulo igual a:
a) 7 m; b) 1 m; c) 5 m.
9. Uma mulher caminha 250 m na direção de
30o a nordeste em relação a norte no sentido
horário e em seguida 175 m diretamente para
leste. a) Utilizando métodos gráficos, determine o deslocamento resultante. b) Compare
o módulo do deslocamento com a distância
que ela caminhou.
10. Uma pessoa caminha do seguinte modo: 3,1
km para o norte, depois 2,4 km para oeste e,
finalmente, 5,2 km para o sul. a) Construa o
diagrama vetorial que representa este movimento. b) Que distância um pássaro deveria
voar, em linha reta, em que direção, de modo
a chegar ao mesmo ponto final?
11. Quais são os componentes de um vetor ~a localizado no plano xy, se sua direção faz um
ângulo de 205o com o eixo x positivo e o seu
módulo é igual a 7,3 unidades?
12. Um vetor deslocamento ~r no plano xy tem um
comprimento igual a 15 m e faz um ângulo
de 15o com o eixo x positivo. Determine os
componentes x e y deste vetor.
13. Determine, utilizando os vetores unitários, a)
a soma dos dois vetores ~a = 4ı̂ + 3̂ e ~b =
−3ı̂ + 4̂. B) Quais são o módulo e a direção
do vetor ~a e ~b?
24
PCNA-FÍSICA ELEMENTAR
14. No sistema de coordenadas da figura abaixo,
mosque que:
ı̂.ı̂=̂.̂=k̂ .k̂ = 1 e ı̂.̂=̂.k̂=k̂ .ı̂= 0
20. Um vetor F~ forma um ângulo θ = 30o com
~ Sabendo que | F~ |= 5 e | G
~ |= 8,
um vetor G.
~
calcule: (a) o módulo da resultante R; (b) o
ângulo formado entre a resultante e o vetor
F~ .
PROBLEMAS ADICIONAIS
15. Um vetor ~a de módulo igual a 10 unidades e
outro vetor ~b de módulo igual a 6 unidades
apontam para direções que fazem um ângulo
de 60o entre si. a) Determine o produto escalar entre os dois vetores e b) o produto vetorial ~a × ~b.
16. A soma de três vetores é igual a zero, como
nos mostra a figura abaixo. Calcule o módulo
de:
a) ~a × ~b; b) ~a × ~c; c) ~b × ~c.
21. Uma ciclovia circular possui raio igual a 500
m. a) Qual a distância percorrida por uma
ciclista que percorre a pista da extremidade
norte para a extremidade sul? b) Qual o
módulo do deslocamento feito pela ciclista da
extremidade norte para a extremidade sul?
c) Qual o módulo do deslocamento feito pela
ciclista ao executar uma volta completa na
ciclovia?
22. Os controladores de tráfego aéreo fornecem
instruções para os pilotos informando em que
direção e sentido eles devem voar. Essas instruções são chamadas de “vetores”. Se estas forem as únicas informações dadas aos pilotos, o nome de “vetor”está sendo ou não
usado corretamente? Explique por que sim
ou por que não.
23. Um engenheiro civil desorientado em uma
grande obra dirige 3,25 km para o norte, depois 4,75 km para o oeste, por seguinte 1,50
km para o sul e por fim 2,50 km para o leste.
Determine o módulo, a direção e o sentido do
deslocamento resultante feito pelo engenheiro
civil em sua obra.
17. Sejam dois vetores representados em termos
de suas coordenadas como:
~a = ax ı̂ + ay ̂ + az k̂ e ~b = bx ı̂ + by ̂ + bz k̂
Mostre que: ~a.~b = ax bx + ay by + az bz
18. Uma força de F~1 , de módulo igual a 2 N forma
um ângulo de 30o com o eixo Ox .Uma força
F~2 , de módulo igual a 6 N forma um ângulo de
80o com o eixo Ox . Calcule: (a) o módulo |F~r|
da força resultante F~r ; (b) o ângulo formado
entre a resultante e o eixo Ox .
19. Um vetor ~a forma um ângulo θ = 60 com um
vetor ~b. Sabendo que | ~a |= 3 e | ~b |= 4, calcule o módulo do vetor resultante ~r (unidades
de força em Newton).
24. Um explorador polar foi surpreendido por
uma nevasca, que reduziu a visibilidade a praticamente zero, quando retornava ao acampamento. Para chegar ao acampamento, deveria ter caminhado 5,6 km para o norte, em
seguida 3,4 km na direção 30o a nordeste medido do norte e por fim 2,3 km fazendo um
ângulo de 85o em relação a oeste no sentido
anti-horário. Quantos quilômetros e em que
direção o explorador deverá seguir em linha
reta para chegar ao acampamento?
25. Uma pesquisadora está indo fazer uma pesquisa em uma caverna e para isso ela deve
percorrer 180 m para oeste, depois 210 m fazendo um ângulo de 45o em relação a oeste no
sentido horário e por fim 280 m fazendo um
25
PCNA-FÍSICA ELEMENTAR
ângulo de 30o em relação a leste no sentido
anti-horário. Depois um quarto deslocamento
não medido, ela retorna ao ponto de partida,
pois esqueceu seu material de pesquisa. Determine o módulo, a direção e o sentido desse
quarto deslocamento.
26. Determine a soma de ~a + ~b em termos de vetores unitários para ~a = (4, 0m)ı̂ + (3, 0m)̂ e
~b = (−13, 0m)ı̂ + (4, 0m)̂ juntamente com o
seu módulo e a orientação de ~a + ~b relativa a
̂. Obs.: O sı́mbolo m é expresso nos vetores
é pra denotar que esses possuem dimensão de
comprimento.
27. O módulo do vetor ~a é 6,00 unidades, o
módulo do vetor ~b é 7,00 unidades e ~a.~b = 14.
Qual o ângulo entre ~a e ~b?
26
PCNA-FÍSICA ELEMENTAR
3
LEIS DE NEWTON
dessas leis. É também muito importante entender
as relações que cada uma das leis possui entre si,
3.1 Objetivos de aprendizagem:
ou seja, não devemos apenas pensar em cada uma
• Entender a diferença entre referenciais inerci- das leis separadamente. Antes disso, vamos olhar
rapidamente a questão do referencial voltada para
ais e não inerciais.
o estudo da dinâmica.
• Aprender o significado de força resultante e
força resultante nula.
3.3
• Aprender como relacionar força resultante,
massa e aceleração de um corpo.
Referencial do ponto de vista da
dinâmica
Conforme veremos, ao falar sobre Leis de New• Identificar as forças decorrentes da interação ton precisaremos saber em que referenciais tais leis
são válidas (tais como a conhecemos) e em que reentre dois corpos.
ferenciais não são válidas. No caso da 1a Lei falaremos também sobre estado de repouso de um
3.2 Introdução
corpo.
Uma pergunta interessante para iniciar este
tópico seria: O que é mecânica do ponto de vista
Todas essas questões fazem necessária uma peda Fı́sica? Podemos dizer que a mecânica é uma
quena
discussão sobre o conceito de referencial.
área da fı́sica que trata as questões de movimento
dos corpos levando em conta, de uma maneira ge- Vamos trazer algumas situações do cotidiano para
ral, as causas do movimento. Nesse sentido, a discutir sobre esse conceito.
mecânica inclui a cinemática e a dinâmica. A
mecânica estuda também situações de equilı́brio
Imagine que você está no banco de trás de
dos corpos (estático e dinâmico) e, portanto, po- um carro a 40 Km/h. Para o motorista, você
demos dizer que a estática também está compreen- está parado, com velocidade igual a 0 km/h. Já
dida nessa importante área da fı́sica. Acrescenta- para alguém que te observa da calçada, você está
se também que se o corpo ou sistema fı́sico se mo- se locomovendo a 40 Km/h. Quem está errado
vimenta de maneira acelerada, a descrição desse nessa discussão? Resposta: Ninguém! As análises,
tipo de movimento também é objeto de estudo tanto do ponto de vista de um referencial (o moda mecânica. Uma outra maneira de descrever a torista) quanto do outro referencial (o observador
mecânica é por meio da influência que corpos exer- na calçada) são válidas. Portanto, desta simples
cem nas interações entre si via forças (sejam forças discussão podemos tirar algumas conclusões imde contato ou de qualquer outra natureza). Vemos portantes: 1- Repouso (ausência de movimento)
que não temos pouca coisa pela frente: Interações é algo relativo (repouso em relação a quem?).
entre corpos; estudos de situações de equilı́brio e Depende do referencial adotado! 2 – Velocidade
de movimento acelerado, entre outras tantas coi- também é um conceito referente a algum referensas. Do ponto de vista de formação profissional, a cial’ (velocidade em relação a quem?). Em relação
mecânica é imprescindı́vel para o engenheiro, qual- ao estado de repouso, alguém pode tentar arguquer que seja a sua área. Do ponto de vista de per- mentar que um referencial fixo em relação à sucepção e entendimento do mundo ao nosso redor é perfı́cie da Terra (uma árvore, por exemplo) está
tão importante quanto o aspecto formativo. Con- absolutamente em repouso. Mas se levarmos em
vidamos então você para ir adiante ao fascinante conta que a Terra também está em movimento,
estudo da mecânica!
como fica essa “certeza”? Bem, do que já sabemos pelos avanços da Fı́sica e da Astronomia, ao
Neste contexto, estudaremos a Dinâmica: que contrário do que se cogitava na antiguidade, não
é a parte da Mecânica que estuda os movimen- existe movimento absoluto e nem repouso absotos e as causas que os produzem ou os modificam. luto. Temos que prestar atenção no referencial
Costumamos construir o arcabouço da mecânica que estamos adotando para fazer a análise do moa partir do enunciado das Leis de Newton. As vimento. O estudo do referencial reserva ainda
Leis de Newton formam um conjunto consistente algumas surpresas. Veremos que nem todos os repara descrever uma imensa variedade de situações ferenciais são equivalentes, e entender esse ponto é
e fenômenos que vemos ao nosso redor. É nosso de- muito importante para a correta compreensão das
ver entender ao máximo o que significa cada uma Leis de Newton.
27
PCNA-FÍSICA ELEMENTAR
Mais um exemplo (na verdade estamos realizando experiências de pensamento1 !). Imaginemos agora que nos encontramos num elevador
movendo-se para baixo num movimento retilı́neo
com velocidade constante. Se o observador que
se encontra dentro dele deixar cair um objeto, ele
cairá normalmente por ação da força de gravidade
normal. Imaginemos agoraque num dado instante
há um problema com o cabo e o elevador entra em
queda livre. Se o observador largar agora o mesmo
objeto ele não cairá (em relação ao observador que
também está caindo aceleradamente).
No primeiro caso (elevador que desce com velocidade constante) podemos tomar o observador
como sendo um referencial inercial. Na outra
situação (cabo arrebentado) o “pobre” observador
que está no elevador não pode mais ser tomado
como um referencial inercial. É, portanto, um
referencial não-inercial. Aqui avisamos ao leitor
que o estudo de referencial é algo bem sutil e
procuraremos ser tão “light” quanto possı́vel, mas
sem perder de vista que referencial inercial e
referencial não inercial do ponto de vista fı́sico
e matemático são não equivalentes, portanto não
devem ser confundidos2 . Vamos colocar a questão
de duas maneiras simples e complementares. A
primeira é que um referencial que está sofrendo
uma aceleração é não inercial. A outra é a
seguinte. Só é válida a aplicação direta das leis de
Newton em referenciais inerciais. Se um observador está em um referencial acelerado ele sentirá o
efeito de força(s) que ele não conseguirá descrever
no próprio referencial. O efeito dessa(s) força(s) é
tão real quanto qualquer outra. Não duvide disso,
prezado leitor! (quem nunca foi “espremido” contra a parede de um ônibus fazendo uma curva?).
O ponto é que nosso corpo “sabe” quando
estamos submetidos a acelerações apreciáveis
1
Experiências de pensamento são recursos utilizados por
grandes fı́sicos, tais como Galileu Galilei e Albert Einstein.
Em tais experiências o arcabouço teórico é utilizado e as
consequências podem ser deduzidas sem custos e sem riscos
para ninguém. Não substitui a experiência de fato, mas
nem por isso deixam de ser interessantes.
2
Apenas para o leitor saber. A Terra por conta dos movimentos que executa em seu “passeio” pelo espaço sideral
sofre efeito de acelerações. Ou seja, “para valer, para valer
mesmo”, a Terra não é um referencial inercial. Como essas acelerações são muito pequenas quando comparadas à
aceleração da gravidade, nós consideramos apenas de maneira aproximada a Terra como sendo um referencial inercial. Isso quer dizer que numa grande variedade de experimentos de mecânica que realizamos em laboratório os
resultados não são afetados apreciavelmente por conta dos
movimentos acelerados que o nosso planeta sofre.
(comparáveis à aceleração da gravidade ou
maiores).
Mas o observador não conseguirá
descrever essa(s) força(s) do ponto de vista do
próprio referencial. Por esse motivo essa força(s)
é(são) chamada(s) de força(s) fictı́cia(s). O que o
leitor precisa mesmo ter em mente é o seguinte:
IMPORTANTE!
1- Um referencial inercial não está acelerado.
2- A aplicação e entendimento das leis de Newton conforme estudaremos nesse material são
válidos para referenciais inerciais.
3.4
Primeira lei de Newton (Princı́pio
da Inércia)
A primeira lei de Newton afirma que se a
força resultante, atuante sobre um corpo é nula,
então o corpo que estiver em repouso, permanecerá
em repouso ou se estiver em movimento com
velocidade constante, ele continuará nesse mesmo
movimento.. Em outras palavras, essa propriedade da matéria de resistir a qualquer variação
em sua velocidade recebe o nome de inércia. Essa
propriedade é diretamente proporcional à massa
do corpo.
Figura 34: Quanto mais lisa a superfı́cie, mais
longe um disco desliza após tomar uma velocidade
inicial.Se ele se move em um colchão de ar sobre
a mesa (c) a força de atrito é praticamente zero,
de modo que o disco continua a deslizar com velocidade quase constante (YOUNG. H. D; FREEDMAN. Fı́sica 1-Sears & Zemansky. Mecânica.
12a . Edição. Ed. Pearson)
A 1a Lei de Newton pode ser ilustrada com
algumas experiências de pensamento (ok, podem
ser ilustradas na prática também!). Quem já andou de carro, ônibus ou avião sabe que quando o
meio de transporte viaja com velocidade estabilizada em linha reta tudo se passa como se o mesmo
28
PCNA-FÍSICA ELEMENTAR
Essa é a importância. Não enxergar de maestivesse parado. Mas tudo muda quando o meio
de transporte sofre uma variação de direção ou no neira plena a relação entre velocidade e aceleração
pode comprometer seu entendimento sobre as leis
módulo da velocidade.
de Newton. Mas agora você já sabe! Se o ob3.5 Relação vetorial entre velocidade e jeto está acelerado, ele não está em equilı́brio e,
portanto, há uma força resultante não nula atuaceleração
ando sobre ele (somente enquanto o objeto estiver
Não são poucos alunos que confundem concei- acelerado).
tualmente e operacionalmente dois conceitos vetoriais muito importantes para a dinâmica: velociHá ainda alguns comentários importantes a sedade e aceleração.
rem feitos sobre a primeira lei de Newton. A primeira lei trata sobre estados de equilı́brio (não aceSão conceitos que estão relacionados, mas são
lerados – força resultante nula). O repouso é apedistintos. É fundamental que o leitor tenha em
nas uma forma de equilı́brio (também chamado
mente o seguinte. Velocidade é um vetor, e qualde equilı́brio estático). Um objeto que se mova
quer variação nesse vetor (velocidade) corresponde
com rapidez constante numa trajetória retilı́nea
a uma aceleração. Sem exceção! Mas o que isso
também se encontra em equilı́brio. O equilı́brio,
quer dizer? Sejamos ainda mais explı́citos.
do ponto de vista da mecânica, é um estado em
1. Situação em linha reta. Pense num carro ace- que não ocorrem mudanças no estado de movilerando ou frenando (qualquer coisa que al- mento do objeto. Uma bola de boliche rolando
tere o módulo da velocidade). Nesse caso a com rapidez constante numa trajetória retilı́nea
aceleração é facilmente visualizável pela mai- também está em equilı́brio (equilı́brio dinâmico) –
oria dos alunos. Nesse caso, temos uma ace- até que bata nos pinos.
leração associada a uma variação do módulo
da velocidade e que possui a mesma direção
A forma vetorial da resultante nula é dada pela
do vetor velocidade.
Equação 14 enquanto que as formas escalares são
mostradas na Equação 15.
2. Situação de curva realizada com velociX
dade escalar constante (curva realizada com
F~ = 0
(14)
pressão constante no acelerador, resultando
em leitura constante no velocı́metro). Nesse (partı́cula em equilı́brio,forma vetorial)
caso temos aceleração associada à variação de
X
X
X
direção do vetor velocidade. Essa aceleração
Fx = 0;
Fy = 0;
Fz = 0
(15)
é perpendicular ao vetor velocidade (veremos
mais a respeito no estudo do movimento cir- (partı́cula em equilı́brio, forma de componentes)
cular uniforme)
Outro ponto importante da primeira lei de
3. Bola que ricocheteia horizontalmente contra
Newton. Um objeto sob a influência de uma
uma parede e retorna com o mesmo módulo
única força jamais pode estar em equilı́brio. A
da velocidade, mas tem seu sentido de moviforça resultante não poderia ser nula. Apenas
mento alterado. Nesse caso, não temos muquando duas ou mais forças atuam é que pode
dança de módulo ou de direção, mas ainda
haver equilı́brio. Podemos testar se algo está ou
assim temos uma aceleração associada à munão em equilı́brio observando se ocorrem ou não
dança de sentido do vetor velocidade.
alterações em no estado de movimento do corpo.
Mas por que essa discussão é importante? Para
responder façamos outra leitura da primeira Lei
de Newton: A velocidade de um objeto, vetorialmente falando, não muda “de graça”. Se há
variação do vetor velocidade (seja de módulo, de
direção ou apenas mudança de sentido) há aceleração e se há aceleração há também a presença
de uma força resultante que perdura enquanto
houver mudança do vetor velocidade.
IMPORTANTE!
Uma força resultante nula sobre um objeto não
significa que ele esteja necessariamente em repouso, e sim que seu estado de movimento
mantém-se inalterado. Ele pode estar tanto em
repouso quanto em movimento uniforme em linha reta.
29
PCNA-FÍSICA ELEMENTAR
3.6
Segunda lei de Newton
De acordo com a primeira lei de Newton,
quando um corpo sofre uma força resultante nula,
ele se move com velocidade constante e aceleração
zero. Mas o que acontece quando a força resultante é diferente de zero? Sobre um disco em movimento na Figura 34 com atrito desprezı́vel, aplicamos uma força horizontal constante na mesma
P
direção e sentido em que ele se move. Logo, F é
constante e se desloca na mesma direção horizontal de v. Descobrimos que enquanto a força está
atuando, a velocidade do disco varia a uma taxa
constante. A velocidade escalar do disco aumenta,
de modo que a aceleração a está na mesma direção
P
de v e F~ (YOUNG. H. D; FREEDMAN. Fı́sica
1-Sears & Zemansky. Mecânica. 12a . Edição. Ed.
Pearson.). Concluı́mos que uma força resultante
não nula que atua sobre um corpo faz com que
o corpo acelere na mesma direção que a força
resultante. O vetor força resultante é igual ao
produto da massa pela aceleração do corpo. Esta
é uma das formulações da 2a Lei de Newton.
X
F~ = m~a
(Segunda Lei de Newton, Forma Vetorial)
Figura 35: Massa, aceleração e a segunda lei de
Newton.
Quando você joga uma bola, pelo menos duas
forças agem sobre ela: o empurrão da sua mão e
o puxão para baixo da gravidade. Experiências
comprovam que, quando duas forças F~1 e F~2
atuam simultaneamente em um ponto A de um
corpo (Figura 36), o efeito sobre o movimento do
corpo é o mesmo que o efeito produzido por uma
única força R dada pela soma vetorial das
duas forças F~1 e F~2 .. Generalizando, o efeito
sobre o movimento de um corpo produzido por um
número qualquer de forças é o mesmo efeito produzido por uma força única igual à soma vetorial de todas as forças. Esse resultado importante denomina-se princı́pio da Superposição das
(16)
Forças. (YOUNG. H. D; FREEDMAN. Fı́sica 1Sears & Zemansky. Mecânica. 12a . Edição. Ed.
Pearson.)
Normalmente usaremos essa relação na forma
de componentes:
X
Fx = max
X
Fy = may
X
Fz = maz
(17)
(segunda lei de Newton, forma de componentes)
A aceleração de um corpo submetido à ação
de um conjunto de forças é diretamente proporcional à soma vetorial das forças que atuam sobre o
corpo (a força resultante) e inversamente proporcional à massa do corpo. Esta é outra formulação
da segunda lei de Newton. Como na primeira lei, a
segunda lei de Newton vale apenas em sistemas de
referência inerciais. A unidade de força é definida
em termos das unidades de massa e de aceleração.
Em unidades SI, a unidade de força denomina-se
Newton (N), sendo igual a 1 Kg.m/s2 . Discutiremos um pouco mais sobre a segunda lei tratando
do princı́pio da superposição de forças.
Figura 36: Duas forças F~1 e F~2 que atuam sobre
um ponto A exercem o mesmo efeito que uma força
R dada pela soma vetorial.
Em problemas de mecânica, só entendemos (e
em muitos casos, só resolvemos) os problemas se
tratamos as forças pelo o que elas são. Entes vetoriais! Normalmente precisamos determinar o vetor
soma (resultante) de todas as forças que atuam sobre um corpo. Chamaremos essa soma de força
resultante que atua sobre um corpo.
~ =
R
PRINCÍPIO DA SUPERPOSIÇÃO DE
FORÇAS:
N
X
F~i
i=1
30
PCNA-FÍSICA ELEMENTAR
Segunda Lei de Newton na Engenharia
Figura 37: Achando os componentes do vetor
soma (resultante) R de duas forças F~1 e F~2 .
Figura 38: O projeto de uma motocicleta de
alto desempenho depende fundamentalmente da
segunda lei de Newton. Para maximizar a ace1. Uma força resultante que atua sobre um leração, o projetista deve fazer a motocicleta ser
corpo faz com que o corpo acelere na mesma mais leve possı́vel (isto é, minimizar sua massa) e
direção da força e sentido da força.
usar o motor mais potente possı́vel (isto é, maximizar a força motriz).
2. Se o módulo da força resultante for constante
a aceleração produzida sobre o corpo também
será.
3.7
Relação entre força e aceleração
3.8
3. Quanto maior a força resultante aplicada sobre o corpo maior a aceleração produzida.
4. Corpos de massas distintas adquirem acelerações distintas quando submetidos à
mesma força resultante.
5. Quanto mais massivo for o corpo menor a aceleração produzida para uma mesma força resultante.
IMPORTANTE!
Todo corpo que não está em equilı́brio sob a
ação de uma ou mais forças está acelerado,
e a recı́proca é verdadeira. Se o corpo está
acelerado é porque há uma força resultante
não nula atuando sobre ele.
IMPORTANTE!
A segunda lei de Newton refere-se a forças
externas. A segunda lei de Newton é válida
somente em sistemas de referenciais inerciais,
assim como é também para a primeira lei de
Newton.
Terceira lei de Newton
Das três leis de Newton, a 3a Lei talvez
seja a mais conhecida pelos estudantes e pelo
grande público, embora com alguns equı́vocos,
em geral. Nesse sentido é importante termos
claro o que é e o que não é a 3a Lei de Newton. Uma das maneiras menos formais e talvez mais poéticas de se enunciar essa lei seria:
“É impossı́vel tocar sem ser tocado”. Com isso
queremos dizer que o ato de tocar traz uma
consequência intrı́nseca. Você toca em algo ou
em alguém e necessariamente é tocado de volta
no com o contato fı́sico com o objeto ou pessoa. Outra maneira interessante de colocar a
3a Lei: “Forças acontecem aos pares!”, uma vez
que é impossı́vel haver uma ação sem reação.
Já sabemos que a reação não é nem mais intensa e nem menos intensa que a ação. Outro
ponto importantı́ssimo: A ação se dá num
corpo e a reação se dá em outro corpo. Se
você estiver analisando um par de forças atuando sobre o mesmo corpo pode afirmar com
certeza que não é um par de ação e reação. Vamos agora estabelecer de forma mais precisa a
terceira lei por meio de alguns enunciados equivalentes.
Enunciados
31
PCNA-FÍSICA ELEMENTAR
“Quando um corpo A exerce uma força sobre um corpo B (uma ‘ação’), então o corpo
B exerce uma força sobre o corpo A (uma
‘reação’). Essas duas forças possuem mesmo
módulo e mesma direção, porém são orientadas em sentidos contrários. Essas duas forças
atuam em corpos diferentes.”
num esquema ou representação do objeto de estudo livre de sua “vizinhança”, contendo, além
do objeto ou corpo, as forças (representadas
por vetores) que atuam sobre ele. Vamos tentar sistematizá-lo através de perguntas e respostas.
1) Qual o primeiro passo?
R:
Seria desenhar uma figura, um esboço da
“Quando dois corpos interagem, as forças
que cada força exerce sobre o outro são sem- situação que será estudada, contendo o objeto
pre iguais em módulo e possuem sentidos ou sistema fı́sico que será estudado e a representação geométrica (vetores indicados por secontrários.”
tas) de todas as forças que atuam sobre o
corpo. No primeiro passo, você deve entender e responder por meio desse recurso gráfico
a seguinte pergunta: O que eu estou estudando? Em linguagem de fı́sico, dizemos
que ao responder a essa pergunta você está
delimitando o objeto de estudo. Muitas
vezes, para poupar tempo, representamos o objeto estudado por um ponto e colocamos sobre
o mesmo a representação geométrica de todas
as forças que atuam sobre o objeto.
Figura 39: Identificação das forças em ação,
quando uma mão puxa uma corda amarrada a um
bloco. a) Mão, corda e bloco. b) Pares de ação e
reação. (As forças verticais não são mostradas).
Figura 40: Não são pares de ação e reação. a)
Essas forças não são um par de ação e reação por
que atuam no mesmo corpo. b) Essas forças serão
iguais somente se a corda estiver em equilı́brio ou Figura 41: A figura acima representa: a) um
se sua massa for desprezada. (As forças verticais esboço da situação a ser estudada. b) as forças
não são mostradas).
atuantes no corpo A. c) a força atuante no corpo
B.
3.9
Diagrama de corpo livre
O que é um diagrama de corpo livre? Podemos encarar como uma parte (fundamental)
de um procedimento padrão para resolver
diversos problemas de mecânica. Consiste
2) Qual o próximo passo?
R:Representar todas as forças que atuam
sobre o objeto. Ou seja: Não deixe força de
fora (das que atuam sobre o objeto); não coloque forças que o objeto exerce na vizinhança.
32
PCNA-FÍSICA ELEMENTAR
Após a representação de todas as forças que
atuam sobre o objeto, em geral é necessário
escolher um sistema de coordenadas para
decompor as forças (se todas as forças
estiverem contidas em uma única direção,
ou seja, se o problema for unidimensional,
basta estabelecer o sentido positivo do eixo).
IMPORTANTE!
Não se deve confundir a representação das
forças que atuam sobre o objeto com as
componentes das forças que atuam sobre
o objeto. As componentes já implicam em
uma escolha de sistema de coordenadas especı́fica.
mos as componentes do vetor força resultante.
Em geral, podemos afirmar que problemas
de dinâmica necessitam de procedimentos de
soma vetorial. Observação 1: Se for um problema de estática, temos que a força resultante
sobre o sistema é nula. Nesse caso vamos trabalhar com um sistema de equações em que
cada componente da força resultante é igual
à zero. Observação 2: Ao longo da resolução
dos problemas vamos ganhando experiência na
escolha de eixos coordenados de modo a simplificar a resolução do problema.
4) Tendo as componentes do vetor força resultante, temos todos os elementos para prosseguir até o final da resolução do problema.
5) Após chegar ao final da resolução do problema, você como engenheiro, vai analisar a validade da solução encontrada. Para isso, faça
uma análise dimensional da resposta; análise
situações limites¸ e veja se o a resposta fornece
resultado fisicamente aceitáveis ou se fornece
resultados absurdos.
Uma vez que entendemos o passo a passo do
diagrama de corpo livre, podemos resumi-lo.
Diagrama de corpo livre é uma representação
(esboço ou figura) do problema a ser estudado
em que você define o objeto (corpo ou sistema fı́sico) que você vai estudar e nele você
representa todas as forças que atuam sobre
o próprio. Atenção! Você deve colocar no
diagrama as forças que atuam sobre o corpo,
e não as forças que o corpo exerce sobre a sua
vizinhança.
Figura 42: a) Uma caixa sobe um plano inclinado,
puxada por uma corda . (b) As três forças que
agem cobre a caixa: a força da corda T a força
gravitacional Fq e a força normal FN . (c) As componentes de Fq na direção ao plano inclinado e na
direção perpendicular.
3) Após escolher o sistema de coordenadas
que usaremos para decompor as forças, prosseguimos na resolução do problema encontrando
a força resultante para cada eixo do sistema de
coordenadas. Para isso fazemos a somatória
de forças para cada eixo, ou seja, encontra-
Principais pontos do capı́tulo:
• Um sistema de referência para o qual a
primeira e segunda leis de Newton são validas denomina-se Sistema de Referencial
Inercial.
• Quando um corpo está inicialmente em
repouso, ele permanece em repouso, se a
soma vetorial das forças que atuam sobre
ele for igual a zero. O mesmo é válido para
um corpo inicialmente em movimento desenvolvendo uma trajetória retilı́nea e velocidade constante.
33
PCNA-FÍSICA ELEMENTAR
• A aceleração de um corpo sujeito a ação de
diversas forças é diretamente proporcional
a a força resultante das forças que agem sobre ele e inversamente proporcional a sua
massa.
• Quando dois corpos interagem a força que
um exerce sobre o outro é igual em módulo
e direção e oposta em sentido. Portanto,
um par de ação e reação nunca atua sobre
o mesmo corpo.
PERGUNTAS CONCEITUAIS:
1. (SEARS & ZEMANSKY, 12a Ed)
Pode um corpo permanecer em equilı́brio
quando somente uma força atua sobre ele?
Explique.
2. (SEARS & ZEMANSKY, 12a Ed)
Uma bola lançada verticalmente de baixo
para cima possui velocidade nula em seu
ponto mais elevado. A bola está em
equilı́brio nesse ponto? Por que sim ou
porque não?
3. (SEARS & ZEMANSKY, 12a Ed)
Quando um carro para repentinamente os
passageiros tendem a se mover para frente
em relação aos seus assentos. Quando um
carro faz uma curva abrupta para um lado
os passageiros tendem a escorregar para
um lado do carro. Por quê?
a
4. (SEARS & ZEMANSKY, 12 Ed) Algumas pessoas dizem que , quando um
carro para repentinamente, os passageiros
são empurrados para frente por uma ‘força
de inércia’ (ou ‘força de momento linear’).
O que existe de errado nessa explicação?
um fio no limite de sua elasticidade,
puxando-se o fio suavemente o peso pode
ser levantado; porém, se você puxar bruscamente, o fio se rompe. Explique isso
usando as Leis de Newton para o movimento.
8. (SEARS & ZEMANSKY, 12a Ed)
Um cavalo puxa uma carroça. Uma vez
que a carroça puxa o cavalo para trás com
uma força igual e contrária à força exercida pelo cavalo sobre a carroça, por que
a carroça não permanece em equilı́brio, independentemente da força que o cavalo imprime na carroça?
9. (SEARS & ZEMANSKY, 12a Ed)
Em um cabo-de-guerra duas pessoas puxam as extremidades de uma corda em
sentidos opostos. Pela terceira Lei de Newton, a força que A exerce em B tem módulo
igual à força que B exerce em A.O que determina quem é o vencedor?(Dica desenhe
um diagrama de corpo livre para cada pessoa)
10. (SEARS & ZEMANSKY, 12a Ed)
Você amarra um tijolo na extremidade de
uma corda e o faz girar em torno de você
em um cı́rculo horizontal. Descreva a trajetória do tijolo quando você larga repentinamente a corda usando diagrama de
corpo livre.
5. (SEARS & ZEMANSKY, 12a Ed) 11. (CUTNELL & JOHNSON, 6a Ed)
Por que o chute em uma rocha grande pode
Uma casinha para alimentar pássaros posmachucar mais o seu pé do que o chute em
sui grande massa e está pendurada em um
uma rocha pequena? A rocha grande deve
galho de árvore, como mostrado no desesempre machucar mais? Explique
nho. Um fio preso ao fundo da casinha
foi deixado solto e fica balançando. Uma
6. (SEARS & ZEMANSKY, 12a Ed)
criança fica curiosa com o fio balançando e
Por que motivo de segurança um carro
puxa o fio tentando ver o que existe dentro
é projetado para sofrer esmagamento na
da casinha. O fio que fica balançando foi
frente e na traseira? Por que não para cocortado do mesmo carretel do que prende a
lisões laterais e capotagens?
casinha ao galho. É mais provável que o fio
7. (SEARS & ZEMANSKY, 12a Ed)
entre a casinha e o galho arrebente com um
Quando um peso grande é suspenso por
puxão contı́nuo e lento , ou com um puxão
34
PCNA-FÍSICA ELEMENTAR
repentino para baixo. Apresente seu raciocı́nio.
12. (CUTNELL & JOHNSON, 6a Ed) A
força externa resultante que age sobre um
objeto é nula. É possı́vel que o objeto esteja viajando com uma velocidade que não
seja nula? Se a resposta é sim, diga se
há condições que devam ser impostas ao
módulo, direção e sentido do vetor velocidade. Se a sua resposta for não, forneça
uma explicação para ela.
13. (CUTNELL & JOHNSON, 6a Ed)
Um pai e sua filha de sete anos de idade
estão frente a frente em cima de patins de
gelo. Com suas mãos, eles se empurram
de modo a se afastarem. (a) Comparem os
módulos das forças que eles experimentam.
(b) Qual deles, em caso positivo, sente a
maior aceleração? Justifique sua resposta.
35
PCNA-FÍSICA ELEMENTAR
APLICAÇÕES DAS LEIS DE 4.3 Aplicações da primeira lei de newton: partı́culas em equilı́brio
NEWTON
4
4.1
Objetivos de aprendizagem:
• Utilizar a primeira lei de Newton para resolver problemas referentes às forças que
atuam sobre um corpo em equilı́brio.
• Utilizar a segunda lei de Newton para resolver problemas referentes às forças que
atuam sobre um corpo em aceleração.
• Aprender a fórmula empı́rica para forças
de atrito estático e de atrito cinético e
como resolver problemas que envolvem essas forças.
• Solucionar problemas referentes às forças
que atuam sobre um corpo que se move
ao longo de uma trajetória circular com
velocidade escalar uniforme.
4.2
Introdução
Vimos no Capitulo 3 que as três leis de Newton do movimento, o fundamento da mecânica
clássica, podem ser formuladas de modo simples. Porém, as aplicações dessas leis em situações tais como um rebocador rebocando um
navio mais pesado do que ele ou um avião fazendo uma curva acentuada requerem habilidades analı́ticas e técnicas para solução de problemas. Neste capı́tulo aprofundaremos as habilidades para a solução de problemas que você
começou a aprender no capı́tulo anterior.
No capı́tulo 3, aprendemos que um corpo está
em equilı́brio quando está em repouso ou em
movimento retilı́neo uniforme em um sistema
de referência inercial. Uma lâmpada suspensa,
uma ponte pênsil, um avião voando em linha
reta e plana a uma velocidade escalar constante – são todos exemplos de situações de
equilı́brio. Nesta seção vamos considerar apenas o equilı́brio de corpos que podem ser modelados como partı́culas, ou seja, as dimensões
dos corpos não são relevantes para os problemas que estamos resolvendo, isto é, dizer que
podemos considerar todas as forças como sendo
aplicadas em um mesmo ponto. O principio
fı́sico essencial é a primeira lei de Newton:
quando uma partı́cula está em repouso ou em
movimento retilı́neo uniforme em um sistema
de referencia inercial, a força resultante que
atua sobre ela – isto é, a soma vetorial de todas as forças que atuam sobre ela – deve ser
igual à zero:
X
F~ = 0
(18)
(partı́cula em equilı́brio, forma vetorial)
Normalmente usaremos essa relação utilizando os
componentes:
X
Fx = 0;
X
Fy = 0;
X
Fz
(19)
(partı́cula em equilı́brio, forma de componentes)
Esta seção é sobre o uso da primeira lei de Newton para resolver problemas envolvendo corpos em
equilı́brio. Alguns deles podem parecer complicados, mas o importante é lembrar que todos esses
Começamos com problemas envolvendo o
problemas são resolvidos do mesmo modo.
equilı́brio, nos quais o corpo está ou em repouso ou movendo-se com velocidade vetorialmente constante. A seguir, generalizamos nossas técnicas para a solução de problemas que
envolvem corpos que não estão em equilı́brio,
para os quais precisamos considerar com exatidão as relações entre as forças e o movimento.
Vamos ensinar como descrever e analisar as
forças de contato entre corpos em repouso ou
quando um corpo desliza sobre uma superfı́cie.
Finalmente, estudaremos o caso importante do
movimento circular uniforme, no qual o corpo
de desloca ao longo de uma circunferência com
velocidade escalar constante.
4.4
Aplicações da segunda lei de newton: dinâmica das partı́culas
Agora estamos preparados para discutir problemas de dinâmica. Nesses problemas, aplicamos a
segunda lei de Newton para corpos sobre os quais
a força resultante é diferente de zero e, portanto,
não estão em equilı́brio; mas sim em aceleração. A
força resultante sobre o corpo é igual ao produto
da massa pela aceleração do corpo.
X
F~ = m~a
(20)
(partı́cula acelerada, forma vetorial)
36
PCNA-FÍSICA ELEMENTAR
Normalmente usaremos essa relação na forma de atômicas” invisı́veis na superfı́cie da mesa sejam
componentes:
comprimidas, produzindo, assim, uma força norX
X
X
mal sobre o bloco.
Fx = max ;
Fy = may ;
Fz = maz
(21)
(segunda lei de Newton, forma de componentes)
IMPORTANTE!
Todo corpo que não está em equilı́brio sob a
ação de uma ou mais forças está acelerado, e a
recı́proca é verdadeira. Se o corpo está acelerado é porque há uma força resultante não nula
atuando sobre ele.
4.5
Forças de contato
Em muitas situações, um objeto está em contato com uma superfı́cie, como, por exemplo, a
superfı́cie de uma mesa. Por conta do contato, há
uma força agindo sobre o objeto. Esta seção discute apenas uma componente desta força, a componente que atua perpendicularmente à superfı́cie.
A próxima seção discute a componente que atua
na direção paralela à superfı́cie. A componente
perpendicular é chamada de força normal.
4.5.1
A terceira lei de Newton tem um papel importante relacionado com a força normal. Na Figura 43, por exemplo, o bloco exerce uma força
sobre a mesa comprimido-a para baixo. Consistente com a terceira lei, a mesa exerce uma força
na mesma direção, dirigida no sentido oposto, de
mesmo módulo sobre o bloco. Esta força de reação
é a força normal. O módulo da força normal indica
o grau de compressão mútua dos dois objetos.
Se um objeto estiver em repouso sobre uma
superfı́cie horizontal e não existirem forças atuando na vertical, com exceção do peso do objeto
e da força normal, os módulos destas duas forças
são iguais; ou seja, | F~N |=| P~ |. Esta é a situação mostrada na Figura 43. O peso deve ser
contrabalançado pela força normal para que o objeto permaneça em repouso sobre a mesa. Se os
módulos destas forças não fossem iguais, haveria
uma força resultante sobre o bloco, e o bloco estaria acelerado para cima ou para baixo, de acordo
com a segunda lei de Newton.
Força normal
Figura 44: (a) A força normal F~N é maior do que o
peso da caixa, pois a caixa está sendo pressionada
Figura 43: Duas forças atuam sobre o bloco, o para baixo com uma força de 11 N. (b) A força
seu peso P~ e a força normal F~N exercida pela su- normal é menor do que o peso, pois há uma força
de 11 N para cima que sustenta parcialmente a
perfı́cie da mesa.
caixa.
A Figura 43 mostra um bloco repousado sobre
uma mesa horizontal e identifica as duas forças que
agem sobre o bloco, o peso P~ e a força normal F~N .
Para entender como um objeto inanimado, como
o tampo de uma mesa, pode exercer uma força
normal, pense no que ocorre quando você senta
sobre um colchão. Seu peso faz com que as molas
no colchão sejam comprimidas. Em consequência
disso, as molas comprimidas exercem em você uma
força para cima (a força normal). De maneira semelhante, o peso do bloco faz com que “molas
Se houver outras forças atuando na direção vertical além de P~ e F~N , os módulos da força normal
e do peso não são mais iguais. Na Figura 44.a,
por exemplo, uma caixa cujo peso é de 15 N está
sendo empurrado para baixo contra uma mesa. A
força de compressão possui um módulo de 11 N.
Assim, a força total para baixo exercida sobre a
caixa é de 26 N, e deve ser contrabalançada pela
força normal orientada para cima para que a caixa
permaneça em repouso. Nesta situação, então, a
37
PCNA-FÍSICA ELEMENTAR
força normal é de 26 N, que é consideravelmente
O atrito é um fenômeno complexo, não totalmaior do que o peso da caixa.
mente compreendido, que surge da atração entre
as moléculas de duas superfı́cies em contato. A natureza desta atração é eletromagnética – a mesma
A Figura 44.b ilustra uma situação diferente. da ligação molecular que mantém um objeto coNeste caso, a caixa está sendo puxada para cima eso. Esta força atrativa de curto alcance se torna
por uma força de 11 N. A força resultante que age insignificante após apenas alguns diâmetros molesobre a caixa devido ao seu peso e a força para culares.
cima é de apenas 4 N. Não é difı́cil imaginar o que
aconteceria se a força aplicada para cima fosse aumentada para 15 N – exatamente igual ao peso da
caixa. Nesta situação, a força normal se anularia.
Na verdade, a mesa poderia ser retirada, já que o
bloco estaria inteiramente sustentando pela força.
As situações na Figura 44 são consistentes com a
ideia de que o módulo da força normal indica o
grau de compressão mútua de dois objetos. Evidentemente, a caixa e a mesa se comprimem mais
fortemente na Figura 44.a do que na Figura 44.b.
4.5.2
Forças de atrito
O atrito é importante em muitos aspectos de
nossa vida cotidiana, ou seja, normalmente pensamos o atrito como algo indesejável, mas o atrito é
necessário. O óleo no motor de um automóvel minimiza o atrito entre as partes móveis, porém, não
fosse o atrito entre os pneus do carro e o solo, não
poderı́amos dirigir um carro e nem fazer curvas. O
arraste do ar – a força de atrito exercida pelo ar
sobre um corpo que nele se move – faz aumentar o
consumo de combustı́vel de um carro, mas possibilita o uso de paraquedas. Sem atrito, os pregos
pulariam facilmente, os bulbos das lâmpadas se
desenrolariam sem nenhum esforço e o hóquei no
gelo seria impraticável (Figura 45).
Figura 45: A prática do hóquei no gelo depende decisivamente do atrito entre os patins do jogador e o gelo.
Quando o atrito é muito elevado, o jogador se locomove
muito lentamente; quando o atrito é muito pequeno, o
jogador dificilmente evita sua queda.
Figura 46: A área microscópica de contato entre a
caixa e o piso é apenas uma pequena fração da área
macroscópica da superfı́cie do tampo da caixa. A área
microscópica é proporcional à força normal exercida
entre as superfı́cies. Se a caixa repousa sobre um de
seus lados, a área microscópica aumenta, mas a força
por unidade diminui, de forma que área microscópica
de contato não muda. Não importa se a caixa está de
pé ou deitada, a mesma força horizontal F aplicada é
necessária para mantê-la deslizando com rapidez constante (PAUL A. TIPLER, GENE MOSCA, 2012).
Como mostrado na Figura 46, objetos comuns
que parecem lisos, e que sentimos como lisos são
ásperos em escala atômica (microscópica). Isto
ocorre mesmo quando as superfı́cies são muito
bem polidas. Quando as superfı́cies entram em
contato, elas se tocam apenas nas saliências, as
chamadas asperezas, mostradas na Figura 46. À
medida que um bloco desliza sobre um piso,
ligações microscópicas se formam e se rompem, e
o numero total dessas ligações é variável. Alisar as
superfı́cies em contato pode, na verdade, aumentar o atrito, visto que mais moléculas se tornam
aptas a formar ligações; juntar duas superfı́cies lisas de um mesmo metal pode produzir uma ‘solda
a frio’. Os óleos lubrificantes fazem diminuir o
atrito porque uma pelı́cula de óleo se forma entre as duas superfı́cies (como no caso do pistão e
38
PCNA-FÍSICA ELEMENTAR
A orientação da força de atrito estático é tal que
das paredes do cilindro no motor de um carro),
ela se opõe a tendência de deslizamento da caixa.
impedido – as de entrar em contato efetivo.
ATRITO ESTÁTICO
IMPORTANTE!
Se a força horizontal que você exerce sobre
uma caixa aponta para esquerda, então a
força de atrito estático aponta para a direita.
A força de atrito estático sempre se opõe à
tendência de deslizamento.
Figura 47: Atrito Estático.
IMPORTANTE!
Você aplica uma pequena força horizontal F~
(Figura 47) sobre uma grande caixa que esta em
repouso sobre o piso. A caixa pode não vir a se
mover perceptivelmente, porque a força de atrito
estático fe exercida pelo piso sobre a caixa contrabalança a força que você aplica. Atrito estático
é a força de atrito que atua quando não existe deslizamento entre as duas superfı́cies em contato – é
a força que evita que a caixa escorregue. A força
de atrito estático, em sentido contraria a força
aplicada sobre a caixa, pode variar em magnitude
de zero até um valor máximo fe máx , dependendo
do seu empurrão. Isto é, enquanto você empurra
a caixa, a força oposta de atrito estático vai aumentando para se manter igual em magnitude à
força aplicada, até que a magnitude da força aplicada exceda o valor máximo da força de atrito
fe máx . Dados mostram que fe máx é proporcional
à intensidade das forças que pressionam as duas
superfı́cies uma contra outra. Isto é,fe máx é proporcional à magnitude da força normal excedida
por uma superfı́cie sobre a outra:
fe máx = µe FN
(22)
(módulo da força de atrito estático)
Onde a constante de proporcionalidade µe é o
coeficiente de atrito estático. Este coeficiente depende dos materiais de que são feitas as superfı́cies
em contato e das temperaturas das superfı́cies. Se
você exerce uma força horizontal com uma magnitude menor ou igual a fe máx sobre a caixa, a
força de atrito estático irá justo contrabalançar
esta força horizontal o mı́nimo que seja maior que
fe máx sobre a caixa, então a caixa começará a
deslizar. Assim, podemos escrever a Equação 22
como:
fe máx ≤ µe FN
(23)
A Equação 23 é uma desigualdade porque a
magnitude da força de atrito estático varia de
zero até fe máx .
IMPORTANTE!
Lembre-se de que a Equação 22 não é uma
equação vetorial porque fe e FN são sempre perpendiculares. Em vez disso, representa
uma relação escalar entre os módulos das duas
forças.
ATRITO CINÉTICO
Se você empurrar a caixa da Figura 47 com suficiente vigor, ela deslizará sobre o piso. Enquanto
ela escorrega, o piso exerce uma força de atrito
cinético fc (também chamado de atrito dinâmico,
ou de deslizamento) que se opõe ao movimento.
Para manter a caixa deslizando com velocidade
constante, você deve exercer uma força sobre a
caixa igual em magnitude e oposta em sentido à
força de atrito cinético exercida pelo piso. Assim como a magnitude da força de atrito estático
máxima, a magnitude de fc da força de atrito
cinético é proporcional à magnitude fn da força
normal exercida por uma superfı́cie sobre a outra:
fc = µc FN
(24)
Onde a constante de proporcionalidade µc é
o coeficiente de atrito cinético. Este coeficiente depende dos materiais de que são feitas as
superfı́cies em contato e das temperaturas das
superfı́cies em contato. Diferentemente do atrito
estático, a força de atrito cinético é independente
39
PCNA-FÍSICA ELEMENTAR
da magnitude da força horizontal aplicada. Ex- sua vez, aplica uma força a sua vizinha. Conperimentos mostram que µc é aproximadamente sequentemente, a força é aplicada à caixa, como
constante para uma larga faixa de valores de mostra a Figura 49.b.
rapidez.
Figura 48: Gráfico da força de atrito.
IMPORTANTE!
O atrito entre o pneu e o piso é aproximadamente o mesmo, seja o pneu largo ou estreito.
O propósito da maior área de contato é diminuir
o aquecimento e o desgaste.
IMPORTANTE!
Os pneus possuem ranhuras não para aumentar
o atrito, mas para deslocar e redirecionar a água
entre a superfı́cie da rodovia e o lado externo
dos pneus. Muitos carros de corrida usam pneus
sem ranhuras, porque correm em dias secos.
A Figura 48 mostra um gráfico da força de
atrito exercida sobre a caixa pelo piso em função
da força aplicada. A força de atrito contrabalança
a força aplicada até que a caixa começa a deslizar, o que ocorre quando a força aplicada excede
a µe FN por uma quantidade infinitesimal. Enquanto a caixa está deslizando, a força de atrito
permanece igual a µc FN . Para quaisquer duas superfı́cies em contato, µc é menor que µe . Isto significa que você deve empurrar com mais vigor para
fazer com que a caixa comece a deslizar, do que
para mantê-la deslizando com rapidez constante.
Figura 49: (a) A força T~ está sendo aplicada à
extremidade direita de uma corda. (b) a força
é transmitida para caixa. (c) Forças são aplicadas às duas extremidades da corda. Estas
forças possuem mesmos módulos e direções opostas (mesma direção e sentidos contrários), (CUTNELL & JOHNSON, 2012).
Em situações como a da Figura 49, dizemos que
“a força T~ é aplicada na caixa por causa da tração
na corda”, significando que a tração e a força
aplicada à caixa possuem o mesmo módulo. Entretanto, a palavra “tração” é comumente usada
para significar a tendência de a corda ser esticada.
Para ver a relação entre estes dois usos da palavra “tração”, considere a extremidade esquerda
da corda, que aplica a força T~ à caixa. De acordo
com a terceira lei de Newton, a caixa aplica uma
força de reação à corda. A força de reação possui
o mesmo módulo e mesma direção que T~ , mas sentido contrário. Em outras palavras, uma força −T~
atua na extremidade esquerda da corda. Desta
forma, forças de mesmo módulo atuam em extremidades opostas da corda, como na figura 48.c, e
tendem esticá-la.
4.5.4
Massa e peso
O peso de um corpo é uma das forças mais familiares que a Terra exerce sobre o corpo. (Quando
você estiver em outro planeta, seu peso será a força
gravitacional que o planeta exerce sobre você.)
infelizmente, os termos massa e peso em geral
são mal empregados e considerados sinônimos em
4.5.3 Forças de tração
nossa conversação cotidiana. É extremamente imForças são frequentemente aplicadas por meio portante que você saiba a diferença entre essas
de cabos ou cordas usados para puxar um objeto. duas grandezas fı́sicas.
Por exemplo, a Figura 49.a mostra uma força T~
A massa caracteriza a propriedade da inércia
sendo aplicada à extremidade direita de uma corda
presa a uma caixa. Cada partı́cula na corda, por de um corpo. Por causa de sua massa, a louça
40
PCNA-FÍSICA ELEMENTAR
fica praticamente em repouso sobre a mesa quando
você puxa repentinamente a toalha. Quanto maior
a massa, maior a força necessária para produzir
uma dada aceleração; isso se reflete na segunda lei
P
de Newton, F~ = m~a.
IMPORTANTE!
Lembre-se que o peso de um corpo atua eternamente sobre o corpo, independentemente de ele
estar ou não em queda livre. Quando um objeto de 10 kg está em equilı́brio, suspenso por
uma corrente, sua aceleração é igual a zero. Porem, seu peso, dado pela Equação 26, continua
puxando-o para baixo (Figura 50). Nesse caso,
a corrente exerce uma força que puxa o objeto
de baixo para cima. A soma vetorial das forças
é igual a zero, mas o peso ainda atua.
O peso de um corpo, por outro lado, é a força
de atração gravitacional exercida pela Terra sobre o corpo. Massa e peso se relacionam: um
corpo que possui massa grande também possui
peso grande. É difı́cil lançar horizontalmente uma
pedra grande porque ela possui massa grande, e
é difı́cil levantá-la porque ela possui peso grande.
Qualquer corpo próximo da superfı́cie da terra que
possua massa de 1 kg deve possuir um peso igual a
9,8 N para que ele tenha a aceleração que observa- 4.6 Dinâmica do movimento circular
mos quando o corpo está em queda livre. GeneraMovimentos circulares são muito comuns na
lizando, qualquer corpo de massa m deve possuir natureza. As palhetas de um ventilador, um CD
um peso com módulo P dado por:
e o pneu de um carro são apenas alguns exemplos que fazem parte de nosso cotidiano. De uma
| P~ |= m. | ~g |
(25) maneira geral podemos afirmar que uma partı́cula
está em movimento circular quando sua trajetória
~
Logo, o módulo | P | do peso de um corpo é é uma circunferência. Em situações onde o vadiretamente proporcional à sua massa m. O peso lor numérico da velocidade permanece constante,
de um corpo é uma força, uma grandeza vetorial, dizemos que o corpo descreve um Movimento Cirde modo que podemos escrever a Equação 25 cular Uniforme (MCU).
como uma equação vetorial (Figura 50):
Quando uma partı́cula se desloca ao longo de
uma circunferência com velocidade escalar constante, a aceleração da partı́cula é sempre orientada
para o centro do cı́rculo (perpendicular à velocidade instantânea). O módulo arad da aceleração
é constante, sendo dado em termos da velocidade
v e do raio R por:
arad =
v2
R
(27)
O ı́ndice inferior ‘rad’ é um lembrete de que
a aceleração da partı́cula é sempre orientada ao
longo da direção radial, para o centro do cı́rculo e
perpendicular à velocidade instantânea. Podemos
Figura 50: A relação entre massa e peso.
também representar a aceleração centrı́peta, arad ,
em termos do perı́odo T , o tempo necessário para
uma revolução:
P~ = m~g
(26)
2πR
T =
(28)
v
Lembre-se de que | ~g | é o módulo de ~g , a
aceleração da gravidade, logo, g é sempre positivo.
Em termos do perı́odo,arad é dada por:
Portanto, P , dado pela Equação 25, é o módulo
do peso e também é sempre um número positivo.
4π 2 R
arad =
(29)
T2
41
PCNA-FÍSICA ELEMENTAR
O movimento circular uniforme, como qualquer
movimento de uma partı́cula, é governado pela segunda lei de Newton. A aceleração da partı́cula
orientada para o centro deve ser produzida por alguma força, ou diversas forças, tais que a soma
P
vetorial F~ seja um vetor sempre orientado para
o centro do cı́rculo (Figura 51). O módulo da aceleração é constante, logo o módulo da força resultante F~total também é constante. Caso a força
para dentro deixe de atuar, a partı́cula é expelida
para fora do cı́rculo descrevendo uma linha reta
tangente ao cı́rculo (Figura 52).
movimento circular uniforme é dado por:
| v |2
R
| F~total |= m. | arad |= m.
(30)
O movimento circular uniforme pode ser
produzido por qualquer conjunto de forças, desde
P
que a força resultante F~ seja sempre orientada
para o centro do cı́rculo e possua módulo constante. Note que o corpo não precisa se mover
em torno de um cı́rculo completo: a Equação 30
é valida para qualquer trajetória que possa ser
considerada como parte de um arco circular.
IMPORTANTE!
A força centrı́peta não é uma força real. Este
é meramente um nome que se dá para a
componente da força resultante que aponta
para o centro de curvatura da trajetória. Assim como a força resultante, a força centrı́peta
não está presente em um diagrama de corpo livre. Apenas forças reais pertencem a diagramas
de corpo livre.
Figura 51: Em um movimento circular uniforme,
tanto a aceleração, como a força resultante são
orientadas para o centro do circulo.
Principais pontos do capı́tulo:
• Forma vetorial da Primeira Lei de Newton:
X
F~ = 0
• Forma de componentes da Primeira Lei de
Newton:
X
Fx = 0;
X
Fy = 0;
X
Fz
• Forma vetorial da Segunda Lei de Newton:
X
F~ = m~a
• Forma de componentes da Segunda Lei de
Newton:
X
Fx = max ;
X
Fy = may ;
X
Fz = maz
• Módulo da Força de Atrito Estático:
Figura 52: O que acontece quando a força orientada para o centro deixa de atuar sobre um movimento circular?
fe máx ≤ µe FN
• Módulo da Força de Atrito Cinético:
fc = µc FN
O módulo da aceleração radial é dado por
2
~
|arad | = |v|
R , logo o módulo | Ftotal | da força resultante sobre uma partı́cula de massa m em um
• O movimento circular uniforme é estudado
pela Segunda Lei de Newton, sob a forma:
|F~total | = m.|arad | = m.
42
|v|2
R
PCNA-FÍSICA ELEMENTAR
EXERCÍCIOS
1. (HALLIDAY & RESNICK, 8a Ed)
Em um cabo-de-guerra bidimensional, Alex,
Charles e Betty puxam horizontalmente um
pneu de automóvel nas orientações mostradas
na vista superior da figura abaixo. Apesar
dos esforços da trinca, o pneu permanece no
mesmo lugar. Alex puxa com a força FA de
módulo 220N, Charles puxa com uma força
FC de módulo 170N e Betty puxa com uma
força FB . Qual é o módulo da força FB exercida por Betty?
2. (CUTNELL & JOHNSON, 6a Ed) Um
alpinista, durante a travessia entre dois penhascos, faz uma pausa para descansar. Ele
pesa 535N. Como mostrado no desenho, ele
está mais próximo do penhasco da esquerda
do que do penhasco da direita, isto faz com
que a tração no trecho à esquerda da alpinista seja diferente da tração no trecho à sua
direita. Determine as trações na corda à esquerda e à direita da alpinista.
3. (SEARS & ZEMANSKY, 12a Ed) O
motor de um automóvel com peso ‘P’ está
suspenso por uma corrente que está ligada
por um anel ‘o’ a duas outras correntes, uma
delas amarrada ao teto e a outra presa na
parede. Ache as tensões nas três correntes
em função de ‘P’ e despreze o peso das
correntes e do anel.
4. (MOYSÉS NUSSENZVEIG, 4a Ed) O
sistema da figura está em equilı́brio. A
distância ‘d’ é de 1 m e o comprimento relaxado de cada uma das duas molas iguais
é de 0,5 m. A massa ‘m’ de 1 kg faz descer o ponto ‘P’ de uma distância h=15 cm e
a massa das molas é desprezı́vel. Calcule a
constante k das molas.
Dados: K=Força/Deformação da mola
5. (MOYSÉS NUSSENZVEIG, 4a Ed) Um
acrobata de 60 kg se equilibra no centro de
uma corda bamba de 20m de comprimento.
O centro desceu de 30 cm em relação às extremidades, presas em suportes fixos. Qual é
a tração em cada metade da corda?
6. (SEARS & ZEMANSKY, 12a Ed) Um
carro de 1130 kg está seguro por um cabo
leve, sobre uma rampa muito lisa (sem
atrito), como indicado na figura. O cabo
forma um ângulo de 31,0o sobre a superfı́cie
da rampa, e a rampa ergue-se 25,0o acima da
horizontal.
a) Desenhe um diagrama do corpo livre para
o carro.
b) Ache a tração no cabo.
c) Com que intensidade a superfı́cie da rampa
empurra o carro?
43
PCNA-FÍSICA ELEMENTAR
7. (CUTNELL & JOHNSON, 6a Ed) A
viga ‘I’ de aço do desenho possui um peso
de 8,00 kN e está sendo suspensa com velocidade constante. Qual a tração em cada cabo
às suas extremidades?
8. (HALLIDAY & RESNICK, 8a Ed) A figura abaixo mostra um arranjo no quais quatro discos estão suspensos por uma corda. A
corda mais comprida, do alto, passa por uma
polia sem atrito e exerce uma força de 98N sobre a parede à qual está presa. As tensões nas
cordas mais curtas são T1 = 58, 8N T2 = 49N
T3 = 9, 8N . Quais as massas (a) do disco A,
(b) do disco B, (c) do disco C e (d) do disco
D?
10. (MOYSÉS NUSSENZVEIG, 4a Ed)
O sistema representado na figura está em
equilı́brio. Determine as tensões nos fios 1,
2 e 3 e o valor do ângulo θ
11. (HALLIDAY & RESNICK, 9a Ed) Se
um corpo-padrão de 1 kg tem uma aceleração
de 2,00 m/s2 a 20,0o com o semieixo positivo,
quais são (a) a componente x e (b) a componente y da força resultante a que o corpo está
submetido e (c) qual é a força resultante em
termos dos vetores unitários? (trabalhando
vetores no contexto de força).
12. (HALLIDAY & RESNICK, 9a Ed) Duas
forças horizontais agem sobre um bloco de
madeira de 2 kg que pode deslizar sem atrito
na bancada de uma cozinha, situada em um
plano xy. Uma das forças é F~1 = 3ı̂ + 4̂.
Determine a aceleração do bloco em termos
dos vetores unitários se a outra é: (a) F =
−3ı̂ + (−4)̂; (b) F = −3ı̂ + 4̂; (c) F =
3ı̂ +(−4)̂.(obs.: todas as forças são dadas em
Newtons) (trabalhando vetores no contexto
de força)
13. (HALLIDAY & RESNICK, 9a Ed)Na figura abaixo, três blocos conectados são puxados para a direita sobre uma mesa horizontal
sem atrito por uma força de módulo T3 =65N.
Se m1 =12kg, m2 =24kg e m3 =31kg, calcule
(a) o módulo da aceleração do sistema, (b) a
tração e T1 (c) a tração T2
9. (MOYSÉS NUSSENZVEIG, 4a Ed) No
sistema representado na figura, calcule as
Tensões nas cordas A e B a compressão na
viga C, desprezando as massas da viga e das
cordas.
14. (HALLIDAY & RESNICK, 9a Ed) A figura abaixo mostra dois blocos ligados por
uma corda (de massa desprezı́vel) que passa
por uma polia sem atrito (também de massa
44
PCNA-FÍSICA ELEMENTAR
desprezı́vel). O conjunto é conhecido como
máquina de Atwood. Um bloco de massa
m1 =1,3kg; o outro tem massa m2 =2,8kg.
Quais são (a) o módulo da aceleração dos blocos e (b) a tração na corda?
e dos fios e o atrito, calcule a aceleração do
sistema e as tensões nos fios 1, 2, 3.
18. (HALLIDAY & RESNICK, 9a Ed) A figura abaixo mostra três blocos ligados por
cordas que passam por polias sem atrito. O
bloco B está sobre uma mesa sem atrito. As
massas são mA = 6,00 kg, mB = 8,00 kg e
mC = 10,0 kg. Quando os blocos são liberados qual a tração na corda da direita?
15. (HALLIDAY & RESNICK, 9a Ed) Um
bloco de massa m1 = 3,70 kg sobre um plano
sem atrito inclinado, de ângulo θ = 30,0o , está
preso por uma corda de massa desprezı́vel,
que passa por uma polia de massa e atrito
desprezı́veis, a um outro bloco de massa m2 =
2,30 kg. Quais são (a) o módulo da aceleração
de cada bloco, (b) a orientação da aceleração
do bloco que está pendurado e (c) a tração da
corda?
16. (HALLIDAY & RESNICK, 9a Ed) A
figura abaixo mostra uma caixa de dinheiro
sujo (m1=3 kg) sobre um plano inclinado sem
atrito de ângulo θ1 =30o . A caixa está ligada
por uma corda de massa desprezı́vel a uma
caixa de dinheiro lavado (m2=2 kg) situada
sobre um plano sem atrito de ângulo θ2 =60o
. A polia não tem atrito e tem massa desprezı́vel. Calcule a tração da corda.
17. (MOYSÉS NUSSENZVEIG, 4a Ed) No
sistema da figura, m1 = 20 kg, m2 = 40 kg,
m3 = 60 kg. Desprezando as massas das polias
19. (CUTNELL & JOHNSON, 6a Ed) No
desenho, o peso do bloco sobre a mesa é de
422N e o bloco pendurado tem peso de 185N.
Ignorando todos os efeitos de atrito e supondo
que a roldana não possui massa, determine:
(a) a aceleração dos dois blocos e (b) a tração
no cabo.
20. (HALLIDAY & RESNICK, 9a Ed) Uma
lata de antioxidantes (m1 = 1,0 kg) sobre
um plano inclinado sem atrito esta ligado a
uma lata de apresuntado (m2 = 2,0 kg). A
polia tem massa e atrito desprezı́veis. Uma
força vertical para cima de módulo F = 6,0
N atua sobre a lata de apresuntado, que
tem uma aceleração para baixo de 5,5 m/s2 .
Determine (a) a tração da corda e (b) o
ângulo β
45
PCNA-FÍSICA ELEMENTAR
cinético entre o bloco 2 e a mesa?
21. (MOYSÉS NUSSENZVEIG, 4a Ed) No
sistema da figura, o bloco 1 tem massa 10 Kg
e seu coeficiente de atrito estático com o plano
inclinado é 0,5. Entre que valores mı́nimo e
máximo pode variar a massa m bloco 2 para
que o sistema permaneça em equilı́brio? Desconsidere o atrito entre o bloco 2 e a parede.
1
22. (HALLIDAY & RESNICK, 9a Ed) O
bloco B da figura abaixo pesa 711N. O coeficiente de atrito estático entre o bloco e a
mesa é de 0,25; o ângulo θ é de 30o . Determine o peso máximo de A para que o sistema
permaneça em repouso.
23. HALLIDAY & RESNICK, 9a Ed) Os
três blocos da figura abaixo são liberados
a partir do repouso. Aceleram com um
módulo de 0,500 m/s2 . O bloco 1 tem massa
M, o bloco 2 tem massa 2M e o bloco três
tem massa 2M. Qual o coeficiente de atrito
24. HALLIDAY & RESNICK, 9a Ed) O
bloco A da figura abaixo Pesa 102N, e o bloco
B pesa 32N. Os coeficientes de atrito entre o
bloco A e a rampa são µe =0,56 e µc =0,25. O
ângulo de inclinação da rampa com a horizontal é de 40o . Suponha que o eixo x é paralelo
à rampa, com o sentido positivo para cima.
Em termos de vetores unitários, qual é a aceleração de A se A está inicialmente (a) em
repouso, (b) subindo a rampa e (c) descendo
a rampa?
25. (HALLIDAY & RESNICK, 9a Ed) Um
bloco de 3,5kg é empurrado ao longo de um
piso horizontal por uma força F de módulo
15N que faz um ângulo de 40o com a horizontal (figura abaixo). O coeficiente de atrito
cinético entre o bloco e o piso é 0,25. Calcule (a) o módulo da força de atrito que o
piso exerce sobre o bloco e (b) o módulo da
aceleração do bloco.
26. (HALLIDAY & RESNICK, 9a Ed) Um
bloco de 4,1 kg é empurrado sobre o piso pela
aplicação de uma força horizontal constante
de módulo 40N. A figura abaixo mostra a velocidade do bloco v em função do tempo t
quando o bloco se desloca sobre o piso ao
46
PCNA-FÍSICA ELEMENTAR
longo de um eixo x. A escala vertical do
gráfico é definida por vs=5 m/s. Qual é o
coeficiente de atrito cinético entre o bloco e o
piso?
27. (CUTNELL & JOHNSON, 6a Ed) O desenho mostra um caixote de 25,0 kg que inicialmente está em repouso. Observe que a
vista mostrada é uma vista da parte de cima
do caixote. Duas forças, F1 e F2 são aplicadas ao caixote, e ele começa a se mover. O
coeficiente de atrito cinético entre o caixote e
o piso é µc = 0,35. Determine o módulo e o
sentido (em relação ao eixo +x) da aceleração
do caixote.
o bloco 2. Encontre (a) a magnitude da aceleração dos blocos e (b) a tração no cordão.
30. (HALLIDAY & RESNICK, 9a Ed) Um
caixote de 68 kg é arrastado sobre um piso,
puxado por uma corda inclinada 15o acima
da horizontal. (a) Se o coeficiente de atrito
estático é 0,50, qual é o valor mı́nimo do
módulo da força para que o caixote comece a
se mover? (b) se µc = 0,35, qual é o módulo
da aceleração do caixote?
31. (HALLIDAY & RESNICK, 9a Ed) Suponha que o coeficiente de atrito estático entre a estrada e os pneus de um carro é 0,60
e não há sustentação negativa. Que velocidade deixa o carro na iminência de derrapar
quando faz uma curva não compensada com
30,5 m de raio?
32. (HALLIDAY & RESNICK, 9a Ed) Qual
o menor raio de uma curva sem compensação
(plana) que permite um ciclista a 29 km/h
faça a curva sem derrapar se o coeficiente de
atrito estático* entre os pneus e a pista é de
0,32?
28. (CUTNELL & JOHNSON, 6a Ed) Um
caixote de 225 kg repousa sobre uma superfı́cie que está inclinada de um ângulo de
20o acima da horizontal. Uma força horizontal (módulo = 535 N e paralela ao chão,
não ao plano inclinado) é necessária para dar
inı́cio ao movimento de descida do caixote no
plano inclinado. Qual o coeficiente de atrito
estático entre o caixote e o plano inclinado?
29. (PAUL A. TIPLER, GENE MOSCA,
6a Ed) Dois blocos ligados por um cordão
como mostra a figura abaixo, deslizam para
baixo sobre um plano inclinado de 10o . O
bloco 1 tem a massa m1 = 0,80 kg e o bloco
2 tem massa m2 = 0,25 kg. Ademais, os coeficientes de atrito cinético entre os blocos e
o plano são 0,30, para o bloco 1 e 0,20 para
33. (HALLIDAY & RESNICK, 9a Ed) Durante uma corrida de trenós nas Olimpı́adas
de Inverno, a equipe jamaicana fez uma curva
de 7,6m de raio com uma velocidade de 96,6
km/h. Qual foi a sua aceleração em unidades
de g?
34. (HALLIDAY & RESNICK, 9a Ed) Na
figura abaixo, um carro passa com velocidade
constante por uma elevação circular e por
uma depressão circular de mesmo raio. No
alto da elevação a força exercida sobre o
motorista pelo assento do carro é zero. A
massa do motorista é de 70 kg. Qual é a
força normal exercida pelo motorista no
banco quando ele passa pelo fundo vale?
47
PCNA-FÍSICA ELEMENTAR
35. (HALLIDAY & RESNICK, 9a Ed)
Um avião está voando em uma circunferência horizontal com uma velocidade de
480 km/h(figura abaixo). Se as asas estão inclinadas formando 40o com a horizontal, qual
é o raio da circunferência? Suponha que a
força necessária para manter esse avião na
trajetória resulte inteiramente de uma “sustentação aerodinâmica” perpendicular à superfı́cie das asas.
36. (HALLIDAY & RESNICK, 9a Ed) Um
disco de metal de massa m=1,5 kg descreve
uma circunferência de raio r = 20 cm sobre uma mesa sem atrito, enquanto permanece ligado a um cilindro de massa M=2,5
kg, pendurado por um fio que passa no centro da mesa (figura abaixo). Que velocidade
do disco mantém o cilindro em repouso?
37. HALLIDAY & RESNICK, 9a Ed) As
curvas das rodovias costumam ser compensadas (inclinadas) para evitar que os carros derrapem. Quando a estrada está seca a força de
atrito entre os pneus e o piso pode ser suficiente para evitar derrapagens. Quando a pista
está molhada o coeficiente de atrito diminui
e a compensação se torna essencial. A figura
abaixo mostra um carro que se move com velocidade escalar constante de 20 m/s em uma
pista circular compensada de raio 190 m. Se
a força de atrito é desprezı́vel, qual o menor
ângulo de inclinação para o qual o carro não
derrapa?
38. (HALLIDAY & RESNICK, 9a Ed) Uma
curva circular compensada de uma rodovia foi
planejada para uma velocidade de 60 km/h.
O raio da curva é 200 m. Em um dia chuvoso,
a velocidade dos carros diminui para 40 km/h.
Qual é o menor coeficiente de atrito entre os
pneus e a estrada para que os carros façam a
curva sem derrapa?
39. (HALLIDAY & RESNICK, 9a Ed) Uma
bola de 1,34 kg é ligada por meio de dois fios
de massa desprezı́vel, cada um com comprimento L = 1,70 m, a uma haste vertical giratória. Os fios estão amarrados à haste a
uma distância d = 1,70 m um do outro e estão
esticados. A tração do fio de cima é 35 N. determine (a) a tração do fio de baixo; (b) o
modulo da força resultante a que esta sujeita
a bola; (c) a velocidade escalar da bola; (d) a
direção da força resultante.
40. (MOYSÉS NUSSENZVEIG, 4a Ed) O
coeficiente de atrito estático entre as roupas
de uma pessoa e a parede cilı́ndrica de uma
48
PCNA-FÍSICA ELEMENTAR
centrı́fuga de parque de diversões de 2 m de
raio é 0,5. Qual é a velocidade mı́nima da centrifuga para que a pessoa permaneça colada
à parede, suspensa acima do chão?
49
PCNA-FÍSICA ELEMENTAR
5
NOÇÕES DE CÁLCULO DIFERENCIAL E INTEGRAL
NA CINEMÁTICA
5.1
Objetivos de aprendizagem:
• Entender como ocorre o estudo do movimento
via introdução dos conceitos básicos da cinemática. São eles: posição, deslocamento,
velocidade e aceleração.
• Compreender os fundamentos (aspectos essenciais) do cálculo diferencial e integral aplicados em problemas da cinemática.
A ideia é colocar aqui os elementos fundamentais mais básicos do cálculo diferencial e integral.
Em sı́ntese, queremos lhe dar uma primeira visão
do assunto a partir de três frentes:
• Dando uma ideia geral do que é tratado nessa
área da matemática;
• Apresentando caracterı́sticas básicas do
cálculo em nı́vel conceitual-operacional, mas
sem aprofundar no rigor matemático;
• Relacionando
a
estrutura
conceitualoperacional do cálculo com as representações
gráficas correspondentes.
• Mostrar exemplos de aplicações de cálculo diAlém disso, para que essa introdução seja vaferencial nas engenharias em nı́vel informaliosa e representativa para você, é necessário o
tivo introdutório.
entendimento das relações entre os conceitos cinemáticos tanto do ponto de vista conceitual5.2 Introdução:
operacional quanto do ponto de vista gráfico. Isso
O cálculo diferencial e integral é um ramo da quer dizer que precisaremos ter domı́nio das fermatemática muito adequado para tratar questões ramentas do cálculo (em nı́vel básico) e entendidinâmicas de uma maneira geral. Determinar mento dos conceitos da cinemática conforme acacomo determinadas quantidades variam ou deter- bamos de mencionar. Mas temos mais uma coisa
minar a quantidade total (valores) de uma gran- para dizer para você, leitor. Não apenas isso é
deza num dado intervalo (de qualquer natureza) possı́vel de ser conseguido como também tem tudo
são problemas gerais que podem ser atacados por para ser muito divertido!
essa área da matemática. Hoje em dia, o cálculo
é usado para achar órbitas de satélites, estimar
5.3 Uma breve discussão sobre refereno crescimento populacional, calcular a inflação, e
cial do ponto de vista da cinemática
também é utilizado em questões importantes de
processos de otimização. Assim, o cálculo diAntes de comentarmos sobre os aspectos de
ferencial e integral é hoje considerado um ins- posição e deslocamento é importante nos basear
trumento indispensável em todos os campos da no fato de que o referencial pode interferir diciência pura e aplicada: em Fı́sica, Quı́mica, Bi- retamente nestas duas grandezas fı́sicas posição e
ologia, Astronomia e principalmente em todas as deslocamento. Por exemplo, numa conversa por
Engenharias. Isso nos mostra que as aplicações telefone, ao dizer a sua posição a alguém, você fade cálculo estão entre as maiores realizações in- talmente adotará um referencial que também seja
telectuais da civilização, tanto do ponto de vista conhecido para a pessoa com quem você está facientı́fico, como também do ponto de vista cultu- lando (Exemplo: Tô aqui perto do Mercado de
ral e social. E você, prezado leitor, terá oportu- São Braz!).
nidade de ter um primeiro contato com esse maravilhoso e vasto campo do conhecimento humano
Mas afinal de contas o que é referencial?
tendo a cinemática como porta de entrada (aqui
neste capı́tulo nos restringiremos ao movimento
Já discutimos um pouco sobre referencial no
em linha reta, ou seja, restritos a uma dimensão).
capı́tulo de vetores quando tratamos da adoção
Isso mesmo: o estudo do movimento é um dos muitos campos da fı́sica em que o cálculo diferencial integral. Outro inventor do cálculo foi o filósofo, e matemático alemão Gottfried Wilhelm Leibniz. Ambos os
e integral é importante.3
3
O fı́sico inglês Isaac Newton estudava questões relacionadas ao movimento e às explicações do movimento
(dinâmica). Pelas necessidades matemáticas implicadas em
tais estudos, com muita labuta e genialidade, desenvolveu
o inı́cio do que conhecemos hoje como cálculo diferencial e
gênios, dos maiores que a humanidade já conheceu, se envolveram em uma terrı́vel pendenga pela honra de ter a
primazia na invenção do cálculo. Tal briga polarizou boa
parte dos cientistas europeus daquela época, com os ingleses ficando do lado de Newton enquanto que os cientistas
alemães tomaram partido por Leibniz.
50
PCNA-FÍSICA ELEMENTAR
de um sistema de eixos coordenados para fazer a
decomposição de vetores (ver Seção 2.5). Também
falamos de referencial no inı́cio do capı́tulo de
Leis de Newton quando vimos que referenciais
que estão acelerados (referenciais não-inerciais) se
comportam e são descritos de maneira diferente
dos referenciais que não estão acelerados (referenciais inerciais) (Seção 3.2).
Vamos falar mais um pouco sobre referencial,
agora no contexto de cinemática. Conforme expresso no inı́cio desta introdução, a nossa discussão está restrita a movimentos em uma dimensão. Ou seja, tudo acontece em cima de uma
linha reta. Essa discussão pode ser facilmente generalizada para duas e três dimensões, pois nós
temos conhecimento de vetores!
Mas voltemos à discussão. Toda medida de
posição se faz a partir de um ponto. Fisicamente
esse ponto é a nossa origem (onde a gente põe o
“zero” da fita métrica, por exemplo). Matematicamente, é a origem do nosso sistema de eixos
coordenados (lá na Seção 2.5 nós já havı́amos falado sobre a necessidade de adotar formalmente
um sistema de coordenadas para efetuar medidas
de posição). Todo eixo coordenado possui uma
parte positiva a partir da origem e uma parte negativa a partir da mesma. Veja a Figura 53.
mas também para onde ele anda (direção e sentido). Veremos esses aspectos com mais detalhes
na seção seguinte.
Não vamos desenvolver extensivamente o
estudo da cinemática. Nosso interesse é abordar
tudo o que é estritamente necessário para o estudo
da dinâmica. Logo, não vamos desenvolver aqui
estudos e manipulações de equações cinemáticas.
Mas fica o alerta! Quando for tratar problemas
de cinemática, não tente apenas decorar as
equações e usa-las cegamente. Estabeleça o seu
referencial, ou seja, estabeleça a origem do
seu sistema de medidas e oriente o sistema
de eixos coordenados que você estiver trabalhando. Esse é o primeiro passo. Sempre! Depois
veja como essa escolha afeta as equações que
você está trabalhando. Caso resolva “pular” essa
etapa, com alta probabilidade você encontrará
o resultado errado para o problema que está
resolvendo ou de fato não será capaz de explicar
como o resolveu, mesmo que esteja “certo” (a
última parte tem probabilidade igual a 100%).
IMPORTANTE!
Para estabelecer um referencial do ponto de
vista da cinemática, precisamos estabelecer a
origem do seu sistema de coordenadas, bem
como a orientação do sistema de eixos
coordenados.
5.4
Figura 53: Indicação de referencial graduada em
metros
5.3 Posição x deslocamento
O que é posição?
Posição, de maneira simples, é a localização de
um
corpo ou objeto em um determinado espaço
Digamos que um objeto esteja na posição 1m
em
relação
a um referencial estabelecido por quem
(portanto, à direita da origem). Se o objeto estiver
à mesma da distância da origem, mas à esquerda está efetuando a análise. Ou seja, para medir a
posição de alguém, precisamos medi-la a partir de
desta, ele estará na posição -1m.
um ponto (origem do referencial).
Essa discussão é importante para o conceito de
deslocamento (que também já foi mencionado
no capı́tulo de vetores). Como já foi dito, deslocamento é um conceito vetorial. No exemplo que
estamos desenvolvendo, embora a distância para a
origem seja a mesma (nos casos +1m ou -1m) faz
diferença do ponto de vista de deslocamento se o
objeto sai da origem para a posição +1m ou da
origem para a posição -1m. Ou seja, para o deslocamento não importa apenas o quanto ele anda,
Para descrever o movimento de uma partı́cula,
precisamos ser capazes de descrever a posição
da partı́cula e como essa posição varia enquanto
essa partı́cula se move para um ponto final.
Para o movimento unidimensional, normalmente
escolhemos o eixo x como linha ao longo da qual
o movimento o movimento ocorre, mas pode ser
o eixo y como, por exemplo, queda livre.
51
PCNA-FÍSICA ELEMENTAR
O que é deslocamento?
Em relação ao deslocamento já vimos que é
uma grandeza vetorial. Um aspecto crucial para
efeito de deslocamento é que importa apenas as
posições final e inicial que o corpo ocupa. Ou
seja, para efeito de deslocamento não importa o
caminho tomado para ir do ponto inicial ao ponto
final. Duas pessoas que saem do mesmo ponto
de partida e chegam a um mesmo local possuem o
mesmo deslocamento, independente do espaço que
percorrem para fazer esse trajeto.
5.5
Velocidade vetorial média x velocidade escalar média
Qual a diferença entre essas velocidades?
A diferença é que a velocidade média é uma
grandeza vetorial e a velocidade escalar média é
uma grandeza escalar. Podemos perceber essa
afirmação na própria definição de ambas como se
segue abaixo:
Velocidade Vetorial Média
A velocidade vetorial média é a razão entre o
A propósito! A origem do verbo deslocar
significa tirar de uma localização e levar para vetor deslocamento e o tempo transcorrido (∆t).
outra localização. Tão somente isso! Com base
~x − x~0
∆~x
~v =
=
(32)
no que foi discutido acima, responda: Um corpo
t − t0
∆t
sai de uma determinada posição, dá “meia volta
ao mundo” e volta para a mesma posição. Esse Onde: ~x é a posição final no instante t final
corpo teve um deslocamento nulo ou diferente de e x~0 é a posição inicial no instante t0 inicial.
zero?
IMPORTANTE!
É importante reconhecer a diferença entre
deslocamento e distância percorrida. A
distância percorrida por uma partı́cula é o
comprimento do caminho descrito pela
partı́cula de sua posição inicial até a sua
posição final. Deslocamento é a variação de
posição de uma partı́cula.
IMPORTANTE!
O vetor velocidade média é um vetor que
aponta na mesma direção e no mesmo sentido
que o deslocamento, pois a constante ∆t é
sempre positiva. Do mesmo modo que no
deslocamento, usaremos os sinais de mais (+)
e o de menos (-) para indicar os dois sentidos
possı́veis para uma dada direção.
Velocidade Escalar Média
IMPORTANTE!
É positivo se a variação de posição ocorre no
sentido crescente de x (o sentido +x ) e
negativo se ocorrer no sentido decrescente
(sentido –x ). Portanto deslocamento é de
natureza vetorial e distância percorrida é de
natureza escalar.
A velocidade escalar média é a razão entre a
distância percorrida e o tempo gasto para realizar
o percurso.
vescalar =
Distância percorrida
Tempo gasto
(33)
Obs: Unidade no SI: metros por segundo (m/s).
5.6
Velocidade instantânea
Antes de analisarmos o conceito de velocidade
O deslocamento é a diferença entre as
instantânea vamos ver o exemplo abaixo para esposições final e inicial (~x e x~0 ).
clarecer com mais detalhes o significado de veloci∆~x = ~x − x~0
(31) dade instantânea. Em uma competição de Moto
Cross, um engenheiro, por meio de equipamentos
Onde temos como variáveis:
de medição, conseguiu descrever a função posição
∆~x - Deslocamento.
de uma das motos como apresentado a seguir:
~x - Posição Final.
x~0 - Posição Inicial.
x(t) = 5t2
52
PCNA-FÍSICA ELEMENTAR
Calcule a velocidade média entre os instantes função varia em função de um parâmetro pontot = 1s e t = 2s.
a-ponto (taxa de variação instantânea da função).
Veremos que quanto maior for a taxa de variação
x(2) − x(1)
20 − 5
v=
=
= 15m/s; ∆t = 1s
da função num dado ponto maior será a inclinação
t1 − t0
2−1
(tangente) da função naquele ponto. No estudo do
movimento a partir do cálculo diferencial vemos
Agora, entre t = 1s e t = 1, 1.
que encontrar a reta tangente à função horária da
x(1,1) − x(1)
6, 05 − 5
=
= 10, 5m/s; ∆t = 0, 1s posição em função do tempo e o problema para
v=
t1 − t0
1, 1 − 1
encontrar a velocidade de um objeto num determinado instante envolve determinar o mesmo tipo
E então, entre t = 1s e t = 1, 01.
de limite. Esse tipo especial de limite é chamado de derivada e veremos que pode ser interx
−x(1)
5,1−5
v = (1,01)
= 1,01−1
= 10, 05m/s; ∆t = 0, 01s pretado como uma taxa de variação ou razão
t1 −t0
incremental tanto nas ciências quanto na engenharia. Veremos que o estudo de cálculo integral
relaciona-se ao processo inverso da derivada (soIMPORTANTE!
matório das áreas).
À medida que ∆t diminui, a velocidade média
se aproxima de um valor-limite, que é a
velocidade instantânea. Para poder entender
Conceito
melhor a definição de velocidade instantânea,
precisamos aprimorar o entendimento do que
vem a ser cálculo diferencial e integral.
Seja uma função f (x) qualquer, e sobre ela
traçamos uma reta que intercepta dois pontos
quaisquer desta função, f (x). A essa reta, chamamos de reta secante, conforme segue na Figura
5.7 Noções de cálculo diferencial
53, que mostra como extraı́mos o fator coeficiente
Para começar, qual o problema fundamen- angular da reta.
tal que o cálculo diferencial responde? Procuraremos responder intuitivamente a essa pergunta
(portanto em nı́vel básico) tanto do ponto de
vista conceitual-operacional quanto do ponto de
vista gráfico. Começando pelo ponto de vista
conceitual- operacional. O cálculo diferencial, cuja
operação matemática correspondente é chamada
de derivada, busca responder a seguinte questão
fundamental: Como uma função varia ponto a
ponto? Ou ainda, de maneira equivalente: Qual
a taxa de variação que uma função apresenta em
função de um determinado parâmetro? É difı́cil
superestimar a importância dessa pergunta. Talvez não seja difı́cil imaginar que responder como a
Figura 54: Reta secante a uma função f (x)
posição de um corpo varia em função do tempo é
importante para o estudo da cinemática e que essa
variação da posição do corpo em função do tempo,
ou melhor, a taxa de variação da posição do corpo
IMPORTANTE!
em função do tempo tem algo a ver com a velociA reta secante a uma curva é uma reta que
dade do corpo. Veremos que quanto menor for o
cruza dois ou mais pontos desta mesma curva
intervalo de tempo considerado, mais nos aproxie o coeficiente angular da reta secante acima é
mamos do conceito matemático da derivada, que é
dado pela fórmula da geometria analı́tica:
definido em termos de um processo de limite. Graf (x + h) − f (x)
ficamente, grosso modo, tudo o que vamos fazer é
m=
(34)
h
sair acompanhando a tangente à função, pontoa-ponto, para responder a questão de como uma
53
PCNA-FÍSICA ELEMENTAR
Note que a Equação 34, quando aplicada à cinemática, nos fornece uma equação conhecida que
é a velocidade média. Em outras palavras, podemos afirmar que velocidade média é a inclinação de uma reta secante como podemos
ver na Figura 55.
Figura 56: Reta secante tendendo a uma tangente.
Em
outras
palavras
podemos
dizer que quando h tende a zero, o valor da inclinação da reta secante tende
ao valor da inclinação da reta tangente.
Figura 55: Gráfico de posição no tempo.
Logo a velocidade média em x é dada pelo coeficiente angular da reta secante à curva como segue
abaixo:
f (x + h) − f (x)
(35)
mx =
h
Substituindo, temos:
vmx =
x2 − x1
∆x
=
t2 − t1
∆t
Vemos que a reta tangente a uma curva é a reta
que intercepta essa mesma curva em somente um
ponto, ou seja, mx = inclinação da reta tangente.
h→0
f (x + h) − f (x)
h
Substituindo, temos:
∆x
dx
=
∆t→0 ∆t
dt
vx = lim
∆x
dx
=
∆t→0 ∆t
dt
vx = lim
(39)
Onde dx
dt é a taxa de variação com a qual a
posição x está variando com o tempo t,
podemos ver isso de forma clara em um
velocı́metro de um automóvel.
(36)
Agora, aproximando o ponto x2 do ponto x1 ,
o próprio ∆t se aproxima de zero e consequentemente a reta secante vai se aproximando de uma
reta tangente no ponto P1 , ou seja, numa reta que
intercepta a função somente neste ponto, além de
ser “rente” ao gráfico. Note que o coeficiente angular dessa reta é a velocidade instantânea.
mx = lim
IMPORTANTE!
Através da expressão da velocidade
instantânea.
(37)
5.8
Aceleração vetorial média x Aceleração escalar média
Qual é a diferença entre aceleração média e
aceleração escalar média? A diferença é que aceleração média é uma grandeza vetorial e aceleração
escalar média é a intensidade ou magnitude dessa
grandeza vetorial. Quando a velocidade de uma
partı́cula varia, diz-se que a partı́cula foi acelerada. Para movimentos ao longo de um eixo, a
aceleração média, em um intervalo de tempo
∆t é:
v~2 − v~1
∆~v
a~m =
=
(40)
t2 − t1
∆t
Para a partı́cula que tem velocidade v~1 no instante t1 e velocidade v~2 no instante t2 , onde a unidade no SI de aceleração é metros por segundo
(38) ao quadrado (m/s2 ).
54
PCNA-FÍSICA ELEMENTAR
5.9
Aceleração instantânea
Também chamada de aceleração pode ser definida seguindo o mesmo procedimento adotado
quando definimos velocidade instantânea. Portanto, temos que:
∆v
dv
=
∆t→0 ∆t
dt
a = lim
(41)
Como podemos ver que a velocidade instantânea é dada por:
Figura 57: Reta horizontal de uma função constante
dx
v=
(42)
dt
função permanece constante, ou seja, não varia.
Portanto, só relembrando, a taxa de variação
Então:
d2 x
a= 2
(43) da função em termos de x , ou seja, a derivada
dt
é igual à zero.
Ou seja, a aceleração de uma partı́cula
DERIVADA DE UMA
em qualquer instante é a derivada segunda
da posição x(t) em relação ao tempo.
A POTÊNCIA EM X
aceleração também é uma grandeza vetorial.
(xn )0 = n.xn−1
IMPORTANTE!
Tome cuidado para não confundir aceleração
com velocidade! A velocidade indica como a
posição de um corpo varia com o tempo e é
um vetor cujo módulo indica a velocidade da
variação de deslocamento do corpo e sua
direção e sentido mostram a direção e sentido
do movimento. Já a aceleração depende de
como o vetor velocidade varia em relação ao
tempo.
(45)
Obs.:Para qualquer n real diferente de zero.
Escolhemos fornecer a regra da derivada para
a função potência, pois uma grande variedade
de fórmulas importantes para a fı́sica é descrita
por esse tipo de função (também conhecida como
função polinomial). Por exemplo, veremos que
no estudo do movimento em uma dimensão que
a posição de um objeto em função do tempo pode
ser descrita da seguinte forma:
x = x0 + v0 t +
PROPRIEDADES DA DERIVADA
FUNÇÃO
at2
2
(46)
Como podemos encontrar a velocidade instantânea em função do tempo para a função
acima? Veremos a seguir os procedimentos a se0
k =0
(44)
rem feito para se determinar a velocidade instantânea e a sua aceleração instantânea em função
O leitor pode estar se perguntando: Por que a do tempo através da regra de soma ou a subtração
derivada de uma função constante é igual à zero? das derivadas das funções.
Bem, o que caracteriza uma função constante é
que independentemente do valor que a variável asSOMA OU SUBTRAÇÃO
sume, o valor da função permanece o mesmo, ou
seja, a taxa de variação é igual à zero para a
f (t) = u(t) ± v(t)
função abaixo conforme a Figura 57.
DERIVADA DE UMA CONSTANTE k
f 0 (t) = u0 (t) ± v 0 (t)
(47)
Vimos que a derivada nada mais é do que
a taxa de variação da função. Para o caso da
função constante, a resposta da pergunta “Como
A derivada da soma (subtração) é igual à soma
varia a função em termos de x ?” é simples. A (subtração) das derivadas.
55
PCNA-FÍSICA ELEMENTAR
CONSTANTE k MULTIPLICANDO A
FUNÇÃO
(kf (t))0 = kf 0 (t)
(48)
IMPORTANTE!
A derivada obedece, portanto, à propriedade
da distributividade para a soma e subtração.
Ou seja, para calcular a derivada de uma
função com dois ou mais termos, derive cada
um dos termos e depois some tudo. A regra
exposta em 5.7 expõe que a derivada de uma
função f (t) multiplicada por k é igual a
derivada de f (t) vezes k. Ou seja, a constante
fica “esperando” para ser multiplicada pelo
resultado da derivada de f (t).
Sendo a derivada igual à taxa de variação
de uma função em termos do parâmetro do qual
ela depende. A pergunta de interesse é o quanto
varia a função em um ponto especı́fico. Para
isso procedemos da seguinte forma: Derivamos a
função e em seguida substituı́mos na derivada
da função o ponto especı́fico no qual estamos interessados. Com base no conhecimento adquirido
até aqui, usando a derivada, calcule a velocidade
instantânea e a aceleração instantânea da seguinte
expressão:
at2
x = x0 + v0 t +
2
Figura 58: Derivada indicando se a) f (x) é crescente ou se b) f (x) é decrescente.
De outra forma, percebe-se que uma função é
crescente em x0 se a reta tangente à função em
x0 está “subindo”, e “mergulhando” em direção
ao eixo x para o caso decrescente. Para o caso de
f 0 (x0 ) = 0, como já visto, diz-se que x0 é um ponto
crı́tico de f . Um ponto crı́tico é basicamente um
ponto cuja derivada é nula ou não existe. Intuitivamente, os pontos que anulam a derivada são ditos máximos ou mı́nimos locais de uma função, já
que a reta tangente a eles é horizontal e, portanto
Em seguinte verifique se a velocidade e a ace- tem coeficiente angular igual a zero, conforme fileração dependem do tempo e reflita sobre os re- gura abaixo:
sultados obtidos.
ANÁLISE DA DERIVADA
A derivada é uma ferramenta muito poderosa
que nos diz se uma função é crescente ou não em
um determinado ponto. Isso é possı́vel analisandose o sinal da derivada da função neste ponto, conFigura 59: Na figura acima, c é máximo local e d
forme a regra abaixo:
0
0
0
f (x0 ) > 0: A função f é crescente em x = x0 ; é mı́nimo local (f (c) = f (d) = 0).
f 0 (x0 ) < 0: A função f é decrescente em x = x0 ;
f 0 (x0 ) = 0: x = x0 é um ponto crı́tico de f .
Um ponto de máximo local pode ser definido como o “cume da montanha”, ou seja,
As duas primeiras afirmações podem ser cons- é um ponto cuja imagem (f (c)) é maior
tatadas pela figura a seguir sobre aspectos impor- que as imagens dos pontos imediatamente
tantes:
à esquerda e à direita de c (c − 0, 00001 e
56
PCNA-FÍSICA ELEMENTAR
c + 0, 00001, por exemplo). Explicação análoga
vale para o mı́nimo local (“vale da montanha”).
IMPORTANTE!
O estudo dos máximos e mı́nimos de uma
função é uma das aplicações mais importantes
da derivada para um engenheiro, o qual usa
essa ferramenta, entre outras finalidades, para
minimizar o custo de seus projetos.
APLICAÇÕES DO CÁLCULO DIFE- Figura 60: Tabela representativa de derivada e
integral de modo sintético.
RENCIAL
O calculo diferencial ou simplesmente derivada
é encontrado nos mais diversos ramos da fı́sica e
engenharia. Podemos encontrar na 2a Lei de Newton com mais sofisticação, como sendo a taxa de
variação do momento linear com o tempo.
dP~
F~ =
dt
Encontramos na definição de potência como
taxa de variação de energia com o tempo:
P =
dU
dt
dq
dt
v=
x = x0 + v0 t +
at2
2
v = v0 + at
Na engenharia elétrica, podemos encontrar na
simples definição de tensão e corrente, temos:
i=
Antes de nos depararmos com a ferramenta
matemática de imensa aplicabilidade na engenharia que é cálculo integral aplicado na cinemática,
iremos abordar pontos importantes das equações
usadas no ensino médio quando temos uma aceleração constante; as equações que conhecemos do
ensino médio como segue abaixo:
dw
dq
v 2 = v0 2 + 2a∆x
Se analisarmos um gráfico com aceleração constante temos:
Outro exemplo da aplicação da derivada
encontra-se na engenharia de telecomunicações
com a famosa Lei de Faraday em campos variantes
no tempo, onde podemos obter a força eletromotriz induzida através da taxa de variação do fluxo
magnético com o tempo:
ε=−
dΦs
dt
Sem contar com as aplicações da derivada na
medicina, biologia, economia e outras áreas do conhecimento. Portanto, podemos perceber a grandiosidade e aplicabilidade dessa valiosa ferramenta
Figura 61: Gráfico de aceleração no tempo.
que é o calculo diferencial. Observando a Figura
60, percebemos que o caminho de “ida” a partir da
posição para a velocidade e posteriormente para a
Com a aceleração constante podemos traçar o
aceleração, nós sabemos! Agora como fazer o cagráfico v x t e encontrar o espaço total.
minho de “volta”?
57
PCNA-FÍSICA ELEMENTAR
pois somar todos os pedaços para obter a área do
todo.”(Cálculo para Leigos).
CONCEITO DE INTEGRAL
O conceito de integral está bastante relacionado
à noção de áreas. Os povos gregos se perguntavam
na Antiguidade: “como calcular a área de uma
figura qualquer?”, como mostra a Figura 64.
Figura 62: Gráfico de velocidade no tempo.
Agora façamos a seguinte pergunta: e se a aceleração não for constante? Ou seja, se a aceleração
depender do tempo como poderemos encontrar a
velocidade e o espaço? Nessa configuração que
citamos, o gráfico, em termos puramente expositivos, é:
Figura 64: Gráfico de uma curva qualquer.
Como a curva da figura acima não pertence
às figuras clássicas, como quadrado, triângulo e
cı́rculo, não são possı́veis calcular sua área com
fórmulas “prontas” da geometria. Bom, mas
existe uma figura geométrica cuja área é bem conhecida na geometria: o retângulo. Sua área pode
ser calculada pelo produto da base com a altura.
Numa tentativa de calcular a área da figura acima,
poderı́amos desenhar vários retângulos cujas alturas são determinadas pela própria figura, como
segue:
Figura 63: Gráfico da aceleração no tempo.
Por não se tratar de um problema simples a obtenção dessa área, apropriamo-nos de um método
matemático chamado integral.
5.10
Noções de cálculo integral
A integral é um recurso matemático inverso
ao da derivada, ou seja, ao invés de achar deridy
vada dx
de uma função f (x), calcula-se a função
dy
f (x) a partir da derivada da função dx
, ou seja,
também é conhecida como Anti-Derivada. “A
integração é uma adição sofisticada. É a modo de
processo de pegar uma forma cuja área você não
pode determinar diretamente, cortar em pequenos
pedaços cujas áreas você pode determinar, e de-
Figura 65: Curva sendo aproximada grosseiramente por retângulos.
Como se vê, a aproximação não é perfeita, mas
quanto menores forem as bases desses retângulos,
mais próxima à soma de suas áreas vai ficar em
58
PCNA-FÍSICA ELEMENTAR
relação à área A desejada, como podemos ver na
Figura 66 a seguir.
INTEGRAL DE UMA CONSTANTE k
Z
kdx = kx + c
INTEGRAL DE
POTÊNCIA EM X
Z
xn dx =
(49)
UMA
FUNÇÃO
xn+1
+c
n+1
(50)
Para qualquer n 6= −1. Obs.: Se n = −1, sua
integral será dada pela função logarı́tmica ln(x) +
c, ou seja, temos:
Z
Figura 66: Aproximação melhorada com o uso de
retângulos mais finos.
x−1 dx =
Z
dx
= ln(x) + c
x
(51)
SOMA OU SUBTRAÇÃO
f (x) = u(x) ± v(x)
Z
Z
f (x)dx =
IMPORTANTE!
A ideia da integral é que a área de uma figura
qualquer é aproximada pela soma das áreas de
incontáveis retângulos de espessura
praticamente nula. Daı́ pode-se considerar a
integral um processo de soma de
pequenı́ssimas parcelas, que seriam as áreas de
cada retângulo, até chegar ao total esperado
(área A da Figura 66).
NOTAÇÃO
u(x)dx ±
Z
v(x)dx
(52)
A integral da soma (subtração) é igual à soma
(subtração) das integrais.
CONSTANTE
UMA FUNÇÃO
MULTIPLICANDO
Z
Z
kf (x)dx = k
f (x)dx
(53)
IMPORTANTE!
Como se podem perceber, essas duas últimas
propriedades da integral são análogas às da
derivada.
A integral deR uma função f (x) é denotada por
f (x)dx, onde se assemelha a um S estendido,
de soma. Tal qual fizemos em relação à derivada,
vamos colocar algumas propriedades da integral. 5.11
R
IMPORTANTE!
As propriedades de distributividade da soma e
da multiplicação de uma integral por uma
constante são mantidas na integração, tal
como na operação de diferenciação.
PROPRIEDADES DA INTEGRAL
Aplicação na cinemática
A derivada foi usada para obter a velocidade
instantânea a partir do espaço e a aceleração instantânea a partir da velocidade instantânea. Já
que a integral é o processo inverso da derivada,
como dito no inı́cio do capı́tulo, era de se esperar
que a integral fosse usada para calcular a variação
de espaço em função da velocidade instantânea
e a velocidade instantânea a partir da aceleração
instantânea. Essa suposição, felizmente, é verdadeira, da qual vêm as equações:
Z
Assim como na seção derivadas, f , u e v são
funções de x. Vamos considerar c uma constante
arbitrária que aparece no processo de integração.
∆S =
vinstantânea dt
(54)
Z
vinstantânea =
ainstantânea dt
59
(55)
PCNA-FÍSICA ELEMENTAR
Ora, se a integral de uma grandeza é igual à
área do gráfico dessa mesma grandeza, então se
nos for apresentado um gráfico da velocidade instantânea em relação ao tempo (vxt), sua área entre dois instantes t1 e t2 será igual à variação de
espaço ocorrida entre esses mesmos instantes. A
Figura 67 a seguir exemplifica melhor essa ideia.
Principais pontos do capı́tulo:
• Gráficos trazem informações importantes e
precisamos relacionar essas informações com
base nos conceitos que estamos estudando.
Neste capı́tulo fizemos a extração da informação a partir de gráficos da cinemática e
relacionamos a informação com as ferramentas básicas do cálculo diferencial e integral.
• Seja o problema de determinar a taxa de variação de uma função ponto-a-ponto ou calcular a área de um gráfico delimitada por uma
dada função em certo intervalo, precisamos
prestar atenção na dimensionalidade da taxa
de variação e na dimensionalidade da área que
estamos trabalhando.
Figura 67: A variação no espaço é igual a área do
gráfico vxt
Embora possa parecer estranho obter o espaço
percorrido a partir de um gráfico da velocidade
em função do tempo, fizemos isso sem perceber
quando resolvı́amos problemas de cinemática no
ensino médio. O mesmo raciocı́nio vale para a velocidade instantânea. Por ser a integral da aceleração no tempo, pode ser calculada também
como a área do gráfico da aceleração versus
tempo(axt):
• Cálculo diferencial (a derivada) e o cálculo integral (a integral) são operações matemáticas
inversas. Isso quer dizer que, atuar com
uma das duas operações matemáticas sobre
a função e, em seguida atuar com a outra
operação, o efeito da primeira é anulado.
Isso nos “devolve” a função original. Esse
é, grosso modo, o que quer dizer operações
matemáticas serem inversas.
Figura 68: A variação no espaço é igual a área do
gráfico axt
60
PCNA-FÍSICA ELEMENTAR
GABARITO GERAL
23o Questão
R: a) 2,85 km e b) O vetor deslocamento,
θ = 142, 12o em relação ao eixo x positivo.
ANÁLISE VETORIAL BÁSICA
24o Questão
o
1 Questão
R: a) 6,43km e b) O vetor deslocamento,
R: a) ~a + ~b = −9ı̂ + 10̂, b) 13,45 e c) θ = 132o , θ = 76, 5o em relação ao eixo x positivo.
em relação ao eixo x positivo.
25o Questão
o
2 Questão
R: a) 301,04 metros e b) O vetor deslocamento,
R: Conceitual
θ = 286, 6o em relação ao eixo x positivo.
o
3 Questão
26o Questão
R: Conceitual
R: a) ~a + ~b = −9ı̂ + 7̂ e b) O vetor deslocao
4 Questão
mento, θ = 52, 13o em relação à ̂ , no sentido
R: Conceitual
anti-horário.
5o Questão
27o Questão
R: Conceitual
R: θ = 70, 52o .
o
6 Questão
R: Conceitual
LEIS DE NEWTON
7o Questão
R: Conceitual
1o Questão
8o Questão
R: Conceitual
R: Conceitual
2o Questão
o
9 Questão
R: Conceitual
R: a) 370 m e b) 425 m
3o Questão
o
10 Questão
R: Conceitual
o
R: a) Gráfico, b) 3,19 Km e c) θ = −138, 81
4o Questão
o
11 Questão
R: Conceitual
R: Ax = −6, 61 unid. e Bx = −3, 08 unid.
5o Questão
12o Questão
R: Conceitual
R: Rx = 14, 48m e Ry = 3, 88m
6o Questão
13o Questão
R: Conceitual
R: a) ~a + ~b = ı̂ + 7̂, b) | ~a |= 5 e θ = 36, 87o ; 7o Questão
| ~b |= 5 e θ = 126, 87o .
R: Conceitual
o
14 Questão
8o Questão
R: Conceitual
R: Conceitual
15o Questão
9o Questão
R: a) ~a.~b = 30 unid. e b) ~a × ~b = 51, 96 unid.
R: Conceitual
16o Questão
10o Questão
R: a) ~a × ~b = 12 unid., b) ~a × ~c = 12 unid. R: Conceitual
c)~b × ~c = 12 unid.
11o Questão
o
17 Questão
R: Conceitual
R: Conceitual
12o Questão
o
18 Questão
R: Conceitual
o
R: a) 7,43 N e b) 68,12
13o Questão
o
19 Questão
R: Conceitual
R: 6,08 N
20o Questão
APLICAÇÕES DAS LEIS DE NEWR: a) 12,58 N e b) 11,46o
TON
PROBLEMAS ADICIONAIS
21o Questão
R: a) 1570,8 m, b) 1000 m e c) zero
22o Questão
R: Conceitual
1o
R:
2o
R:
3o
R:
Questão
241N
Questão
T~e = 918, 57N e T~d = 845, 35N
Questão
T~1 = P~ , T~2 = 0, 577P~ e T~2 = 1, 155P~
61
PCNA-FÍSICA ELEMENTAR
4o Questão
R: k = 775N/m
5o Questão
R: T~ = 9804N
6o Questão
~ = 7224, 38N
R: T~ = 5459, 93N e N
o
7 Questão
R: T~ = 4257N
8o Questão
R: a) 4,0 kg b) 1,0 kg c) 4,0 kg d) 1,0 kg
9o Questão
R: T~a = 980N , T~b = 2677N e T~c = 3279N .
10o Questão
R: T~1 = 1960N , T~2 = 1697, 4N , T~3 = 3394, 8N e
θ = 60o
11o Questão
R: a) 1,88 N, b) 0,684 N e c) (1, 88N )ı̂ +(0, 684N )̂
12o Questão
R: a) 0m/s2 , b) (4, 0m/s2 )̂ e c) (3m/s2 )ı̂
13o Questão
R: a) 0, 97m/s2 , b) T~1 = 11, 6N e c) T~2 = 34, 9N
14o Questão
R: a) 3, 59m/s2 ; b) T~ = 17, 4N
15o Questão
R: a) 0, 735m/s2 e c) T~ = 20, 8N
16o Questão
R: T~ = 15, 8N
17o Questão
R: a) 1, 79m/s2 b) T~1 = 134N c) T~2 = 402N d)
T~3 = 402N
18o Questão
R: a) T~ = 81, 67N
19o Questão
R: a) 2, 99m/s2 e b) T~ = 129N
20o Questão
R: a) T~ = 2, 6N e β = 17, 21o
21o Questão
R: a) 3, 54kg < m < 10, 6kg.
22o Questão
R: P~ = 102, 62N
23o Questão
R: 0,37
24o Questão
R: a) 0m/s2 , b) −3, 88m/s2 e c) –1, 03m/s2
25o Questão
R: a) 11 N; b) 0, 14m/s2
26o Questão
R: a) 0,54
27o Questão
R: a) 1, 68m/s2
28o Questão
R: 0,665
29o Questão
R: a) 0, 96m/s2 e b) T~ = 0, 18N
30o Questão
R: a) 304,2 N e b) 1, 29m/s2
31o Questão
R: 13 m/s
32o Questão
R: 20,69 m
33o Questão
R: 9, 7~g
34o Questão
R: 1372 N
35o Questão
R: 2, 4x103 m
36o Questão
R: 1,81 m/s
37o Questão
R: 12o
38o Questão
R: 0,063
39o Questão
R: a) 8,74 N, b) 37,9 N e c) 6,45 m/s
40o Questão
R: 6,26 m/s
62
PCNA-FÍSICA ELEMENTAR
REFERÊNCIAS BIBLIOGRÁFICAS
• CUTNELL. J. D; JOHSON, K. W. Fı́sica.
Volume 1. Sexta Edição. Ed. LTC.
• DOCA, R. H.; BISCUOLA, G. J.; BÔAS, N.
V. Tópicos de Fı́sica 1: MECÂNICA. 18a Ed.
São Paulo: Saraiva, 2001.
• FEYNMAN, R.P., LEIGHTON, R.B.,
SANDS, M., Lectures on Physics. v. 1, New
York: Addison-Wesley Publishing Company,
1963.
• HALLIDAY, D.; RESNICK, R., Fı́sica. v. 1,
4a ed. Rio de Janeiro: LTC Ltda, 1992.
• HEWITT, P. G. Fı́sica Conceitual. trad. Trieste Freire Ricci e Maria Helena Gravina. 9a
ed. Porto Alegre: Bookman, 2002.
• MARK, R.; Cálculo para Leigos. 2a Edição.
Rio de Janeiro : Alta Books 2012.
• NUSSENZVEIG, H.M., Curso de Fı́sica
Básica, v. 1, São Paulo: Edgar Blücher
LTDA, 1987.
• PAUL, A.T; GENE. M; Fı́sica para Cientistas e Engenheiros. Volume 1 Rio de Janeiro:
LTC 2012
• WALKER, J. Fundamentos de Fı́sicaHlalliday-Resnick. Volume 1 8a . Edição. Rio
de Janeiro: LTC Ltda, 1993.
• YOUNG. H. D; FREEDMAN. Fı́sica 1-Sears
& Zemansky. Mecânica. 12a . Edição. Ed.
Pearson.
63