UNIVERSIDADE POSITIVO
CURSO DE ENGENHARIA DA COMPUTAÇÃO
PLATAFORMA INTERATIVA DE AUXÍLIO NA
REABILITAÇÃO
PÓS-CIRÚRGICA DO JOELHO
CURITIBA
2011
MICHAEL ANTONIO
THIAGO WIEZBICKI
PLATAFORMA INTERATIVA DE AUXÍLIO NA
REABILITAÇÃO
PÓS-CIRÚRGICA DO JOELHO
Monografia apresentada junto ao Curso de
Engenharia da Computação da Universidade
Positivo, como requisito parcial à obtenção
do título de Engenheiro da Computação.
Orientador: Prof. Dr. Alessandro Brawerman
COMISSÃO EXAMINADORA:
Prof. Dr. Alessandro Brawerman
Prof. Msc. Ederson Cichaczewski
Prof. Msc. Valfredo Pilla Junior
CURITIBA
2011
I
UNIVERSIDADE POSITIVO
Reitor: Prof. José Pio Martins
Vice-Reitor: Prof. Arno Antonio Gnoatto
Pró-Reitor de Graduação: Prof. Renato Casagrande
Diretor Acadêmico: Prof. Marcos José Tozzi
Coordenador do Curso de Engenharia da Computação: Prof. Leandro de Souza
II
AGRADECIMENTOS
Aos nossos pais, pelo apoio e motivação nos momentos de incerteza,
realização ou nas tardes horas da noite de muita persistência.
Ao nosso orientador por acreditar na ideia, e por ajudar a reconhecer
melhorias que foram feitas para o sucesso do trabalho.
Aos amigos e colegas, por sugestões na compra de materiais, auxílio e
apoio nas horas de dificuldades.
III
RESUMO
Pessoas que passam por cirurgias no joelho tendem a passar por
sessões exaustivas de exercícios repetitivos e dolorosos. Os movimentos
isotônicos, onde há simplesmente trabalho físico, são executados na maioria
das vezes em maca, sendo necessário permanecer imóvel, exercitando
sequencialmente o membro inferior. Este trabalho apresenta uma plataforma
embarcada e portátil, com o objetivo de fornecer entretenimento enquanto o
paciente passa pelas sessões de fisioterapia, usando como base, uma joelheira
rígida, que captura informações da amplitude dos movimentos do joelho
(flexão/extensão) e perna (abdução/flexão). Os dados são enviados a um
computador que apresenta jogos interativos, simples que possibilitam a
execução de movimentos contínuos da perna enquanto o usuário joga. É
apresentada no computador uma interface que propicia a geração de relatórios
de desempenho para o fisioterapeuta, tornando possível a análise de evolução
do usuário, em relação à amplitude inicial e final no intervalo de sessões
aplicadas. Os exercícios propostos são os principais utilizados em maca para
reabilitação inicial, e propiciam aumento de tônus muscular, além de melhora
do joelho, apresentam fortalecimento dos músculos inferiores da coxa e
panturrilha. O computador mantém todas as informações obtidas em banco de
dados para geração de relatório com histogramas por sessão, amplitude média
por tempo e tendência de evolução. Toda a transmissão de dados é sem fio,
com a finalidade de possibilitar e facilitar a movimentação livre e independente
do usuário. São dispensados com o uso da plataforma, os goniômetros
mecânicos onde o fisioterapeuta tem a percepção simplesmente visual da
evolução do indivíduo. O projeto é validado através de testes de esforço e
tempo de resposta, onde são comparados os movimentos executados com os
movimentos que são coletados pela plataforma, através de gráficos e
relatórios.
Palavras-chave: Reabilitação interativa,
fisioterapia, goniômetro, sistema embarcado.
IV
biofeedback,
joelheira
para
ABSTRACT
People that suffer a knee surgery, tend pass through exhaustive
sessions of painful and repetitive exercises. The isotonic movements, where
there is a simply physical work, are executed mostly in litter, where it‟s
necessary remains still, exercising sequentially the inferior member. It was
developed an embedded and portable platform, engaged a rigid knee brace that
captures information of amplitude of knee motion (flexion/extension) and leg
(abduction/flexion). The data are sent to a computer that shows interactive
games, simple that allow the execution of the continuous movement of the leg
while the user plays. It‟s presented in the computer, an interface that provides
make performance reports for the physiotherapist, making possible the analysis
of the user evolution, in relation the initial and final amplitude in the range of the
applied sessions. The proposed exercises are the main used in the litter for
initial rehabilitation, and provide increasing the muscle tone, improving the knee
and strengthening the muscles have lower thigh and calf. The computer keeps
all the information in a database for making reports with histograms per session,
average amplitude per time and evolution tendency. All the data transmission is
wireless, in order to enable and facilitate the free and independent motion of the
user. Are not needed with the platform, mechanic goniometers where the
physiotherapist has simple visual perception of the evolution of the user. The
project is validated through stress tests and time response, where are
compared the executed movements with the data that are collected by the
platform, through charts and reports.
Key-words: Interactive rehabilitation, biofeedback,
physiotherapy, goniometer, embedded system.
IV
knee
brace
for
LISTA DE FIGURAS E TABELAS
FIGURA 1 – PRINCIPAIS MÚSCULOS DA COXA QUE MOVIMENTAM ARTICULAÇÕES DO JOELHO ................. 3
FIGURA 2–TRÊS EIXOS POSSÍVEIS DE MOVIMENTAÇÃO DO QUADRIL - (KAPANDJI, A. L) ........................... 4
FIGURA 3 – APOIO SOBRE A MACA PARA A EXECUÇÃO DO EXERCÍCIO - (KAPANDJI, A. L) ......................... 5
FIGURA 4 – ÂNGULO MÁXIMO DE FLEXÃO DO JOELHO - (KAPANDJI, A. L) .................................................. 5
FIGURA 5 – ÂNGULO MÁXIMO DE FLEXÃO DO QUADRIL- (KAPANDJI, A. L) ................................................. 6
FIGURA 6 - JOELHEIRA DESENVOLVIDA PELA EMPRESA (HUMANWARE, 2011) ..................................... 7
FIGURA 7 – KIT DE ESTIMULAÇÃO COM ELETRODOS (CURRENT BODY, 2011)..................................... 8
TABELA 1 - COMPARATIVO ENTRE PROJETOS RELACIONADOS ................................................................... 9
FIGURA 8 – ARQUITETURA BÁSICA E COMPONENTES USADOS. ................................................................ 11
FIGURA 9 - JOELHEIRA COM POTENCIÔMETRO .......................................................................................... 13
FIGURA 10 – QUANTIDADE DE PACIENTES E SUAS RESPECTIVAS IDADES ................................................ 14
FIGURA 11 – QUANTIDADE DE PACIENTES E HORAS SEMANAIS DE EXERCÍCIOS DE FISIOTERAPIA .......... 15
FIGURA 12 – NÚMERO DE PACIENTES ENTEDIADOS COM OS EXERCÍCIOS TRADICIONAIS ........................ 15
FIGURA 13 – NÚMERO DE PACIENTES QUE GOSTARIAM DE INTERATIVIDADE NOS EXERCÍCIOS ............... 16
FIGURA 14– FLUXO DE DADOS E FUNCIONAMENTO BÁSICO...................................................................... 18
FIGURA 15 - EXEMPLO DE CÓDIGO PARA CONFIGURAÇÃO DO CONVERSOR AD ...................................... 20
FIGURA 16 - EXEMPLO DE CÓDIGO DE CONFIGURAÇÃO SERIAL PARA O ATMEGA328P ........................ 21
FIGURA 17 – ALGORITMO DE CALIBRAÇÃO PARA O JOGO ARKANOID ....................................................... 21
FIGURA 18 – CÓDIGO DE CALIBRAÇÃO ARKANOID .................................................................................... 22
FIGURA 19 – ALGORITMO PARA CALIBRAÇÃO NO JOGO DO ALVO............................................................. 23
FIGURA 20 - PRINCIPAIS CAMADAS DO XNA FRAMEWORK (MICROSOFT, 2011) ................................ 25
FIGURA 22 - INÍCIO PADRÃO DOS JOGOS .................................................................................................. 27
FIGURA 23 - PARÂMETROS DA PORTA SERIAL. ......................................................................................... 28
FIGURA 24 – COMUNICAÇÃO SERIAL......................................................................................................... 29
FIGURA 25 – TELA DO JOGO ALVO ............................................................................................................ 30
FIGURA 26 - FLUXOGRAMA JOGO DO ALVO .............................................................................................. 31
FIGURA 27 – JOGO ARKANOID................................................................................................................... 33
FIGURA 28 - FLUXOGRAMA DO JOGO ARKANOID....................................................................................... 34
FIGURA 30 – DIAGRAMA DE CLASSES – JOGOS........................................................................................ 36
FIGURA 31 – MODELO ENTIDADE-RELACIONAMENTO .............................................................................. 36
TABELA 2 – PROTOCOLO DE COMUNICAÇÃO ............................................................................................. 37
FIGURA 32 – VESTINDO A JOELHEIRA ........................................................................................................ 38
FIGURA 33 – TEMPO DE VIDA DA BATERIA DA PLATAFORMA EM MINUTOS ................................................ 39
FIGURA 35 - HISTOGRAMA POR SESSÃO DE FLEXÃO E EXTENSÃO ........................................................... 41
FIGURA 37 – HISTOGRAMA AO LONGO DE SESSÕES DE ABDUÇÃO........................................................... 42
TABELA 3 - CUSTOS ................................................................................................................................... 43
FIGURA 39 - CONEXÃO DO MICROCONTROLADOR ATMEGA 328P ......................................................... 48
FIGURA 40 - COMPONENTE DE TRANSMISSÃOXBEE E PINOS UTILIZADOS ................................................ 49
FIGURA 43 – PLACA DE CIRCUITO IMPRESSO DESENVOLVIDA PARA O PROJETO...................................... 51
FIGURA 44 – PLACA EM COBRE (JÁ CORROÍDA)........................................................................................ 52
FIGURA 45 – SOLDAGEM DOS COMPONENTES EM PLACA ......................................................................... 52
FIGURA 46 – MONTAGEM EM CAIXA .......................................................................................................... 53
FIGURA 47 – JOELHEIRA CONCLUÍDA ........................................................................................................ 54
FIGURA 48–SOMA DE RIEMANN................................................................................................................. 55
FIGURA 49 – FLUXOGRAMA DE RIEMANN .................................................................................................. 56
VI
LISTA DE ABREVIATURAS E SÍMBOLOS
ADC
Analogic/Digital Converter
Ω
Ohm
A
Amper
V
Volt
ms
Milisegundos
Hz
Hertz
RISC
Reduced Instruction Set Computer
IDE
Integrated Development Environment
PCI
Placa de Circuito Impresso
IEEE
Institute of Electrical and Electronics Engineers
Mux
Multiplexador
Xbee
Dispositivo transmissor que utiliza o protocolo ZigBee
USART
Universal Synchronous Asynchronous Receiver Transmitter
VIII
SUMÁRIO
1 INTRODUÇÃO ............................................................................................................................. 1
2 FUNDAMENTAÇÃO TEÓRICA ...................................................................................................... 3
2.1 MÚSCULOS DA COXA QUE MOVIMENTAM ARTICULAÇÕES DO JOELHO ............................... 3
2.2 MOVIMENTOS UTILIZADOS NOS EXERCÍCIOS ......................................................................... 4
2.3 TECNOLOGIAS UTILIZADAS ...................................................................................................... 6
2.4 TRABALHOS RELACIONADOS ................................................................................................... 7
3 ESPECIFICAÇÃO E PROJETO ......................................................................................... 11
3.1 VISÃO GERAL ......................................................................................................................... 11
3.2 PESQUISA DE CAMPO ................................................................................................... 14
3.3 HARDWARE ....................................................................................................................... 16
3.3.1 ARQUITETURA DA PLATAFORMA DE HARDWARE ............................................ 16
3.3.2 FIRMWARE DO MICROCONTROLADOR .............................................................................. 18
3.3.2.1 CONFIGURANDO O ADC .................................................................................................. 19
3.3.2.2 CONFIGURANDO A TRANSMISSÃO SERIAL...................................................................... 20
3.3.2.3 ALGORITMO PARA CALIBRAÇÃO DA FLEXÃO/EXTENSÃO DO JOELHO............................ 21
3.3.2.4 ALGORITMO PARA CALIBRAÇÃO DA ABDUÇÃO/EXTENSÃO DA PERNA ......................... 22
3.4 SOFTWARE............................................................................................................................. 23
3.4.1 DESCRIÇÃO DO SOFTWARE ................................................................................................ 23
3.4.2 ARQUITETURA DO SOFTWARE ........................................................................................... 25
3.4.3 INICIALIZAÇÃO DOS JOGOS ................................................................................................ 26
3.4.4 COMUNICAÇÃO SERIAL ...................................................................................................... 27
3.4.5 JOGOS ................................................................................................................................. 29
3.4.5.1 ALVO ................................................................................................................................ 29
3.4.5.2 ARKANOID ....................................................................................................................... 32
3.4.6 DIAGRAMA DE CLASSES E ENTIDADE RELACIONAMENTO ................................................. 34
X
4 TESTES ...................................................................................................................................... 38
4.1 USANDO O EQUIPAMENTO ................................................................................................... 38
4.2 AUTONOMIA DO SISTEMA (TEMPO DE UTILIZAÇÃO) ........................................................... 39
5 RELATÓRIOS DE PROGRESSO ................................................................................................... 40
6 CUSTOS ................................................................................................................................. 43
7 CONCLUSÃO ............................................................................................................................. 44
8 REFERÊNCIAS ..................................................................................................................... 46
9 ANEXOS ................................................................................................................................. 48
9.1 DIAGRAMAS DE PINOS E CONEXÕES....................................................................... 48
9.2 LISTA DE COMPONENTES E MÓDULOS NECESSÁRIOS ..................................... 50
9.3 LISTA DE RECURSOS DE LABORATÓRIO NECESSÁRIOS .................................. 51
9.4 PLACA DE CIRCUITO IMPRESSO ................................................................................ 51
9.5 RECURSOS, BIBLIOTECAS NECESSÁRIOS PARA A CONSTRUÇÃO DO
SOFTWARE .............................................................................................................................. 53
9.6 REQUISITOS PARA EXECUÇÃO E USO DO SOFTWARE ...................................... 54
9.7JOELHEIRA CONCLUÍDA ................................................................................................ 54
9.8 IMPLEMENTAÇÕES FUTURAS ..................................................................................... 55
X
1
1 INTRODUÇÃO
A fisioterapia tem o papel de corrigir danos motores ou evitar qualquer
complicação ou piora no quadro da doença, permitindo ao indivíduo voltar a
realizar tarefas simples do cotidiano, tornando-o independente (TEIXEIRA et al,
2000).
No entanto, o tratamento e recuperação de pessoas com patologias que
interferem em suas funções motoras podem estender-se entre meses e anos.
Estes exercícios necessitam de um acompanhamento frequente de um
profissional, exigindo um grande esforço.
Desde a idade antiga até o início do período medieval, os exercícios
eram utilizados constantemente na recuperação motora. As percepções iniciais
da vantagem do uso de exercícios de reabilitação datam a partir das
civilizações romanas e gregas (GUIMARÃES et al, 2003).
Na idade média, a desvalorização do corpo humano coloca em segundo
plano a Fisioterapia, priorizando o valor da alma, ou seja, caráter religioso.
Somente com o início da época renascentista, onde a beleza do corpo da
mulher e do homem é utilizada em obras de arte, com pinturas e esculturas,
surge como subárea da ginástica, a cinesioterapia com o objetivo de
manutenção da saúde e correção de deformidades (GUIMARÃES et al, 2003).
Nos tempos de Revolução Industrial nota-se um aumento na quantidade
de doenças relacionadas ao trabalho, ocasionadas por longos períodos de
exposição em ambientes inadequados, insalubres e sujos, o que contribuiu
com a prática de exercícios como método de cura. Porém, foi após a I Guerra
Mundial, com altos índices de mutilações, doenças e alterações em organismo,
que a cinesioterapia obteve destaque e utilização em pacientes vítimas pósguerra (CRUZ et al, 2003).
Exercícios e atividades de fortalecimento muscular têm um papel
indispensável na reabilitação. Uma modalidade do tratamento fisioterápico é o
tratamento ativo, neste módulo de terapia está a cinesioterapia, que
literalmente quer dizer terapia do movimento (do grego kínesis, movimento
e therapeia, terapia), isto é, o tratamento de doenças motoras através do
movimento do corpo ou da região/membro afetada. A cinesioterapia é dividida
em três grupos: exercícios isométricos (contração de músculos sem causar
movimento), exercícios isocinéticos (exercícios de movimento com alguma
pressão muscular) e os exercícios isotônicos, estes envolvem puramente o
trabalho físico, dinamicamente exercitando os músculos e regulando a função
motora, envolvendo uma alternância rítmica entre contração e relaxamento.
(BIASOL et al, 2007).
2
O tratamento e a recuperação é um processo de aprendizagem para o
paciente, sendo necessário conhecer o próprio corpo e suas limitações. Para
que o processo completo de recuperação tenha um resultado satisfatório, ou
seja, o indivíduo tenha realmente recuperado ou melhorado os movimentos
antes perdidos, deve-se haver determinação ao longo de todo o período de
reabilitação com fisioterapia. Para isso as atividades realizadas durante o
tratamento não podem ser resumidas em uma simples visita à clínica, mas
devem estimular a interação com o paciente, onde sejam conhecidos seus
progressos e objetivos.
Os problemas enfrentados na aplicação da cinesioterapia, onde há o
acompanhamento da evolução de pacientes ao longo do tratamento, exigem
uma solução diferenciada, removendo as barreiras da falta de estímulo, da
complexidade de visualização de resultados e de avaliação não estatística dos
dados obtidos.
De maneira a auxiliar o profissional fisioterapeuta a coletar dados de
desempenho e evolução do paciente, aplicando a cinesioterapia, este trabalho
apresenta uma plataforma a ser aplicada na recuperação dos movimentos de
flexão e extensão do joelho, que foram alterados pós-cirurgia.
O indivíduo que está sobre tratamento, é estimulado a executar
movimentos lentos e repetitivos, não exigindo força, apenas leve coordenação
motora. A intenção é obter resultados com a terapia de forma que a plataforma
atue como meio principal de interação usuário-computador, deste modo a
interatividade adotada pelo sistema faz o papel estimulante em relação à
pessoa que está fazendo a atividade designada.
O objetivo de desenvolvimento deste trabalho é construir um sistema
integrado de hardware e software, que seja portátil, de fácil uso, que o
fisioterapeuta possa usá-lo em seus pacientes no auxílio do tratamento de
recuperação pós-cirúrgica do joelho através do uso de jogos simples. Esperase que com o uso de jogos o paciente possa desfrutar de um melhor
aproveitamento das sessões de fisioterapia, executando os exercícios com
maior facilidade e motivação, tornando essa tarefa muito menos monótona.
O restante dessa monografia traz no Capítulo 2, a fundamentação
teórica, que relaciona aspectos físicos de músculos utilizados nos exercícios e
tecnologias utilizadas. No Capítulo 3, é descrita a construção do projeto, no
quarto capítulo são apresentados testes e são feitas validações do projeto e
questões de custo e usabilidade e resultados obtidos.
3
2 FUNDAMENTAÇÃO TEÓRICA
Neste capítulo são apresentados os movimentos que são utilizados nos
exercícios propostos, a sua importância, e quais músculos estão envolvidos no
processo relacionado.
2.1 MÚSCULOS DA COXA QUE MOVIMENTAM ARTICULAÇÕES
DO JOELHO
Os músculos relacionados a movimentação do joelho tem origem na
coxa e são divididos de acordo com posição e função em dois grupos:
músculos extensores anteriores e músculos flexores posteriores (GRAAFF,
1942).
Os músculos anteriores são o sartório e o quadríceps femoral, o primeiro
que é o músculo mais longo do corpo humano, age nas articulações do quadril
e do joelho para flexionar e rodar lateralmente o quadril. O segundo, que é o
nome dado aos quatro músculos que o formam: reto femoral, vasto lateral,
vasto medial e vasto intermediário, atuam na extensão do joelho, no movimento
conhecido de chute de futebol. (GRAAFF, 1942).
Os músculos posteriores, conhecidos como músculos do jarrete que são:
bíceps femoral, semitendíneo e semimembranáceo, atuam de forma inversa,
complementando o movimento dos músculos extensores (GRAAFF, 1942).
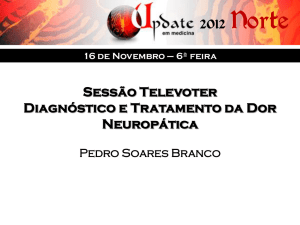
A Figura 1, mostra a visão frontal e traseira da coxa para melhor
visualização dos músculos envolvidos.
Figura 1 – Principais músculos da coxa que movimentam articulações do joelho
(NEOPAGE, 2011)
4
2.2 MOVIMENTOS UTILIZADOS NOS EXERCÍCIOS
Os movimentos que são coletados pelo usuário da plataforma são
baseados em deslocamentos do quadril e joelho, conforme a Figura 2, onde é
possível notar três eixos possíveis de movimentação (x,y,z).
O uso do movimento do quadril está relacionado com a musculatura
envolvida, a qual apresenta ligação direta com o joelho, possuindo enervações
e fibras interligadas. Sua excitação é fundamental para que o processo de
reabilitação seja completo e o usuário receba a resposta adequada.
Figura 2–Três eixos possíveis de movimentação do quadril - (Kapandji, A. L)
Para que os exercícios utilizados sejam padronizados e que haja um
critério que quantifique o grau de fidelidade dos resultados obtidos na
plataforma, foi estabelecido um protocolo para mensuração das sessões
executadas.
O protocolo estabelece, conforme a Figura 3, que todos os exercícios
devem ser executados em maca, sem contato do pé com o chão. A joelheira
deve ser vestida de modo que a haste fique paralela ao eixo da perna, tendo
como forma de regulagem, o aparecimento do osso patelar sobre o orifício de
liberdade de movimentação do artefato.
5
Figura 3 – Apoio sobre a maca para a execução do exercício - (Kapandji, A. L)
O primeiro movimento é o de flexão e extensão do joelho, descrito na
Figura 4, conforme Kapanji, este movimento é o principal no processo de
reabilitação do usuário. Tendo a extensão máxima um ângulo de 0º e a flexão
máxima em torno de 160 a 175º na qual o calcanhar toca as nádegas, sendo
que este depende do condicionamento muscular, idade e saúde do usuário
(KAPANJI et al, 2000)
Figura 4 – Ângulo máximo de flexão do joelho - (Kapandji, A. L)
Na capacidade de flexão do quadril (Figura 5), há um grau de liberdade
de 90º, este movimento é descrito como a angulação máxima obtida entre o
afastamento reto de uma coxa com a outra.
6
Figura 5 – Ângulo máximo de flexão do quadril- (Kapandji, A. L)
Para cada um desses exercícios é proposto um jogo diferente, de
maneira a explorar ao máximo o exercício sem desmotivar o paciente.
2.3 TECNOLOGIAS UTILIZADAS
Para desenvolvimento do trabalho, são utilizadas as tecnologias abaixo:
Microcontroladores RISC AVR, Atmel de 8 bits;
Transmissores e receptores sem fio ZigBee (IEEE 802.15.4);
Acelerômetros analógicos de três eixos, Free Scale;
Sensor resistivo linear;
Comunicação RS-232;
Biblioteca Microsoft XNA, para desenhos gráficos e programação
para jogos;
Linguagem C# para o software;
Linguagem C, para o microcontrolador;
7
2.4 TRABALHOS RELACIONADOS
São apresentados trabalhos relativos a mesma área com propósitos
semelhantes ou que tiveram o mesmo princípio de construção.
2.4.1 MEKA (Mechatronic device for Knee Analysis)
MEKA – Dispositivo Mecatrônico para Análise do Joelho – é fabricado e
desenvolvido pela empresa HUMANWARE em conjunto com a Spin Off da
Scuola Superiore Sant‟Anna (Pisa, Itália). É atualmente validada pela Rizzoli
Orthopedic Institute of Bologna, para análise dos movimentos do joelho
(HUMANWARE, 2011).
É um dispositivo ergonômico e leve, que pode ser usado nas principais
atividades físicas, capaz de medir os principais ângulos fisiológicos do joelho,
com dois graus de liberdade, a flexão/extensão e abdução/adução. A Figura 8
ilustra este equipamento descrito.
É composto de:
Módulo de transmissão sem fio para o computador;
Interface vestida com dois sensores;
Um software para análise de dados e visualização
Figura 6 - Joelheira desenvolvida pela empresa (HUMANWARE, 2011)
8
2.4.2 KNEEHAB (COMPLETE KNEE REHABILITATION)
KNEEHAB, desenvolvido pela empresa Current Body, é um dispositivo
construído com a finalidade de auxiliar na reabilitação por lesão do joelho.
O princípio de funcionamento desse equipamento é por EMS, ou seja,
por estimulação elétrica do quadríceps por via de pulsos enviados ao nervo
motor (CURRENT BODY, 2011).
É garantida, segundo o fabricante, com o uso do equipamento, a
aceleração do processo de reabilitação do joelho devido ao aumento de tônus
muscular adiantado do quadríceps (CURRENT BODY, 2011).
Figura 7 – KIT de estimulação com eletrodos (CURRENT BODY, 2011)
9
Comparativo
Captura de movimentos
Tratamento
Análise
Biofeedback
PIARPCJ
Mecânica
Sim
Sim
Sim
MEKA
Mecânica
Não
Sim
Sim
KNEEHAB
Não
Eletroterapia
Não
Não
Tabela 1 - Comparativo entre projetos relacionados
A Tabela 1 descreve os comparativos entre os projetos relacionados e o
projeto construído, no que tange os itens presentes em cada um.
11
3 ESPECIFICAÇÃO E PROJETO
Para elaboração do projeto e obtenção dos resultados desejados
conforme a ideia inicial, são descritas as etapas de construção da plataforma.
3.1 VISÃO GERAL
A Figura 6, descreve a arquitetura básica utilizada no projeto e os itens
que foram usados na sua construção.
Figura 8 – Arquitetura básica e componentes usados.
Para desenvolvimento do projeto é utilizado um potenciômetro linear de
10 kΩ, para coletar angulação de flexão e extensão da musculatura do joelho.
O uso de um sensor resistivo para essa finalidade é a facilidade e simplicidade
de construção do dispositivo em questão, bastando uma ponte de Wheatstone
para acoplamento.
O acelerômetro Freescale MMA7260Q é adotado por apresentar
sensibilidade de 800 mV/g ajustável em 1,5g, 2g, 4g e 6g se tornando ideal
para possível mudança de sensibilidade e ajuste necessário. Possui consumo
12
de apenas 500 µA, o que é ideal para a aplicação que funcionará com bateria
(FREESCALE, 2011).
A série AVR ATMEGA da Atmel possuem uma arquitetura RISC Harvard
de 8 bits modificada, possuindo alto desempenho de processamento e
amplamente utilizada em projetos profissionais nas indústrias automotivas,
automação e que exigem alta confiabilidade e segurança (ATMEL, 2011).
Características:
Operação entre 1,5 e 5,5 V. Facilita a integração com o módulo ZigBee,
acelerômetro e giroscópio que funciona somente a 3,3V;
10 MIPS a 10 MHz, característica de um RISC;
131 instruções;
Facilidade e bom desempenho de programação em linguagem C, na IDE
AVR Studio da Atmel, propiciando assim economia de tempo no
desenvolvimento do firmware;
32 kB de memória flash para programa, possibilitando longos códigos;
Interface serial USART interna;
Conversor analógico-digital 10 bits com 6 canais, dispensando assim o
uso de ADs separados para o projeto;
Encapsulamento DIP 28 pinos. Facilita a construção de placas.
Custo baixo, R$ 15,00 por componente, sendo seu preço acessível
relativo a microcontroladores concorrentes.
O protocolo ZigBee, que está definido na IEEE 802.15.4, é uma
especificação de transmissão de dados sem fio direcionada à ambientes
industriais e em dispositivos eletrônicos, que foca na baixa potência e no custo
menor de implementação. Pode alcançar até 70 metros de distância em
ambientes abertos e utilizando freqüências não licenciadas para a transmissão,
geralmente 2,4 GHz. A escolha dos módulos XBee do fabricante Maxstream,
leva em consideração a implementação da pilha ZigBee internamente do
componente, a comunicação USART serial para facilidade de comunicação
com o microcontrolador, facilitando a complexidade do projeto (DIGI, 2011).
Para comunicação com o computador é utilizado um conversor serialRS232, o MAX 232 da Texas Instruments, que é de baixo custo e amplamente
mais utilizado (TEXAS, 2011).
13
Figura 9 - Joelheira com potenciômetro
A plataforma desenvolvida utiliza uma joelheira com haste ligada em um
sensor resistivo para coletar o movimento de flexão e extensão do joelho
(Figura 7). Para coletar movimentos de adução e extensão do quadril, são
acoplados dois giroscópios e um acelerômetro sob o tornozelo do usuário, com
a finalidade de medir os ângulos máximos de extensão do quadril com o joelho
estendido.
Para unificar as informações, o usuário dispõe além da joelheira, um
pequeno módulo de processamento e transmissão de 20 x 20 x 10 cm, que
está preso ao tornozelo. A finalidade do módulo é servir de terminal para os fios
elétricos que saem da joelheira, tratar as informações dos movimentos e
transmití-las sem fio para o computador. A justificativa de utilizar transmissores
sem fio para o computador é proporcionar ao usuário maior liberdade de
movimento, podendo este estar acomodado em uma cadeira, maca ou
qualquer outra superfície que seja conveniente para o fisioterapeuta.
Na outra extremidade, há um módulo receptor de informações, este
coleta os dados enviados e encaminhá-los para o computador utilizar na
aplicação.
O computador tem um software de simulação que recebe os dados dos
movimentos coletados pelos sensores de posicionamento e possibilita ao
usuário escolher um jogo virtual de interação simples, após a seleção do jogo
há um sistema de calibração para que haja um ajuste de acordo com o quadro
físico do usuário. O fisioterapeuta pode selecionar no software o nome do
usuário, o tipo da sessão de exercícios (tempo, velocidade, períodos, etc).
14
A partir do momento que o jogo é iniciado, paralelamente são gravados
ao longo do tempo dados do desempenho do usuário, como velocidade de
resposta dos movimentos, número de acertos e erros. São gerados gráficos ao
longo do tempo com a evolução do usuário nos parâmetros que serão medidos.
O fisioterapeuta pode acompanhar o usuário ao longo do tratamento,
comparar gráficos de desempenho, mostrar médias, desvios padrões e
estabilização de desempenho. Todas as características mencionadas
anteriormente que o software faz, não implicam em curar ou diagnosticar o
usuário, simplesmente auxiliam o trabalho do profissional fisioterapeuta a obter
uma visão mais precisa do tratamento adotado.
3.2 PESQUISA DE CAMPO
Durante o mês de abril, em parceria com o Instituto do Joelho e do
Ombro, de Curitiba (ERNLUND L. ,Av. Silva Jardim, 2455), foi realizado um
questionário com a finalidade de verificar a aceitação do usuário quanto a idéia
do uso da interatividade associada com exercícios na forma de reabilitação.
Foram conseguidas 11 amostras.
Foram feitas as perguntas abaixo e os dados obtidos são:
1) Qual a sua idade?
8
7
6
5
4
3
2
1
0
Quantidade de
pacientes
20 - 30
30 - 40
Figura 10 – Quantidade de pacientes e suas respectivas idades
2) Quantas horas semanais de exercícios você executa?
15
5
4
3
2
Número de horas de
exercícios
1
0
1
2
3
4
5 ou
mais
Figura 11 – Quantidade de pacientes e o número de horas semanais de
exercícios de fisioterapia
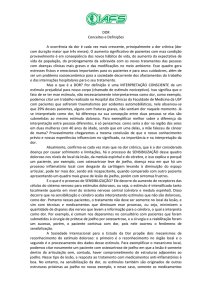
3) Os exercícios que executa são entediantes?
9
8
7
6
5
4
3
2
1
0
Pacientes
Sim
Não
Figura 12 – Número de pacientes entediados com os exercícios tradicionais
4) Se fosse disponibilizada uma forma interativa para execução dos
exercícios, em formato de jogos, por exemplo, acredita que a fisioterapia
seria mais interessante?
16
8
7
6
5
4
3
2
1
0
Pacientes
Sim
Não
Figura 13 – Número de pacientes que gostariam de interatividade nos
exercícios
Note que segundo o gráfico da Figura 12, 8 dos 11 pacientes
entrevistados acham seus exercícios entediantes. Está é uma das razões para
desenvolvimento deste projeto.
Com base nas perguntas feitas para os pacientes da clínica de
fisioterapia, a maioria executa até 3 horas semanais de exercícios físicos e diz
que os exercícios que executam são entediantes. Com o aproveitamento dessa
resposta dada, é questionada se seria interessante a idéia de utilizar jogos para
fazer exercícios, sendo que a mesma teve uma aceitação de aproximadamente
63 %.
Tendo como base as respostas desse questionário, é encontrada mais
uma motivação e interesse para execução desse trabalho.
3.3 HARDWARE
São descritos os respectivos módulos de hardware utilizados para a
construção da plataforma e o firmware necessário para seu funcionamento. Os
diagramas de conexão e componentes utilizados.
3.3.1 ARQUITETURA DA PLATAFORMA DE HARDWARE
É acoplada à joelheira um potenciômetro com três eixos, estes presos
ao tornozelo e a coxa, com a finalidade de apresentar variação de resistência
ao movimento sofrido pela extensão e flexão do joelho. Para coleta e
17
tratamento do sinal obtido são usadas pontes de Wheatstone, com a finalidade
de divisor de tensão e equilíbrio em resposta do potenciômetro.
Para coleta do movimento de adução e extensão do quadril é utilizado
um acelerômetro, fixado sobre pequena placa de cobre no tornozelo do
usuário. Este sensor de posição fornece em nível analógico o nível de tensão
que corresponde diretamente a taxa de variação do movimento que está sendo
coletado, nesse caso inclinação.
A Figura 14 contém o diagrama de blocos da arquitetura que é
implementada, com seus respectivos módulos de interação e sentido,
descrevendo o fluxo em que seguirá a informação até chegar ao computador.
Os fios, que alimentam os sensores e que “trazem” as informações dos
mesmos, são conectados diretamente à unidade de transmissão, que é uma
caixa fechada presa ao tornozelo do paciente com dimensão de 20 x 20 x 10
cm. Nessa unidade fechada estão presentes sobre a placa de circuito impresso
(PCI), o microcontrolador AVR ATMEGA 328p (Atmel, 2011) e o módulo de
transmissão XBee (Digi, 2011).
No que diz respeito ao microcontrolador, este recebe os sinais dos
sensores injetados diretamente, pois o mesmo possui um conversor AD
interno. Após a leitura, tratamento e cálculo do das informações coletadas, o
microcontrolador comunica-se com o módulo XBee via protocolo USART Serial,
enviando texto puro, byte a byte, cada caractere e número que indica estado e
posição de cada sensor acoplado ao joelho e tornozelo.
Ao receber os dados o módulo sem fio repete a informação e envia ao
outro módulo receptor de forma transparente tudo o que recebeu pela interface
serial. O módulo receptor da outra ponta está ligado em outro microcontrolador
do mesmo modelo ao anterior. Ambos estão sob uma placa de circuito
impresso sob a bancada da mesa que estará com o computador. Existe uma
ligação física via cabo serial entre o microcontrolador, MAX 232 e computador,
com a finalidade de enviar dados finalmente ao computador que foram
recebidos em outra ponta.
18
ACELERÔMETRO
POTENCIÔMETRO
AC OUT
AC OUT
CONVERSOR A/D
DATA BUS
RS-232
ZIGBEE
AVR 2
RS-232
ZIGBEE
RS-232
AR
AVR 1
PC
Figura 14– Fluxo de dados e funcionamento básico
3.3.2 FIRMWARE DO MICROCONTROLADOR
A construção do firmware é feita em Linguagem C, para uso em
microcontroladores ATMEL da linha AVR, com o uso da IDE AVRStudio 4.0
(ATMEL, 2011).
São necessárias configurações dos registradores para que a os
conversores A/D funcionem. Para que configuração da transmissão serial
possa funcionar no microcontrolador em questão, são necessárias as
configurações de no mínimo três registradores (UCSRB,UCSRC e UBRR) e
mais um especial que serve para capturar os dados que estão no barramento
(UDR) (ATMEL, 2011).
19
3.3.2.1 CONFIGURANDO O ADC
O código abaixo (Figura 15), mostra como são feitas as configurações
dos registradores para que seja obtida uma taxa de amostragem de 67,5 kHz.
O registrador ADCSRA recebe os bits de configuração de amostragem
superescalar 128, ou seja, com um clock de 8 MHz, que seja utilizado no
microcontrolador, há 67,5 kHz de taxa de amostragem (ATMEL, 2011).
O registrador ADMUX têm o bit REFS0 para indicar que utiliza uma
referência externa sobre o pino AVCC do microcontrolador, este, conforme a
Figura 10, esta conectado à alimentação de 3.3V para que haja melhor
resolução dos 10 bits disponíveis para conversão analógica/digital dos
sensores para o controlador, diminuindo assim a tensão de fundo de escala
(ATMEL, 2011).
O bit ADLAR é ativado para que ocorra um deslocamento binário dos 10
bits do ADC, truncando 2 bits de baixa significância para uma leitura de 1 byte
seja feita por um único registrador (ATMEL, 2011).
O bit ADFR é habilitado para que o AVR possa executar leituras de
conversão ADC automaticamente sem requisições externas do usuário
(ATMEL, 2011).
Em seguida o bit ADEN será ligado no registrador ADCSRA para que o
sistema de conversão analógico/digital do microcontrolador seja habilitado após
todos os registradores serem configurados (ATMEL, 2011).
É acionado o uso da interrupção com o bit ADIE. A função sei() ativa o
sistema global de interrupções, o bit ADSC inicia o sistema de conversões
instantaneamente (ATMEL, 2011).
Todo o acionamento das interrupções ocasiona na execução automática
da função ISR(), que conterá as variáveis que somam as informações e enviam
via comunicação serial para o computador (ATMEL, 2011).
ADCSRA |= (1 << ADPS2) | (1 << ADPS1) | (1 << ADPS0);
ADMUX |= (1 << REFS0);
ADMUX |= (1 << ADLAR);
ADCSRA |= (1 << ADFR);
ADCSRA |= (1 << ADEN);
ADCSRA |= (1 << ADIE);
sei();
ADCSRA |= (1 << ADSC);
ISR(ADC_vect)
20
{
//interupção
}
Figura 15 - Exemplo de código para configuração do conversor AD
3.3.2.2 CONFIGURANDO A TRANSMISSÃO SERIAL
Primeiramente faz-se necessário que os bits RXEN e TXEN sejam
habilitados no registrador UCSRB para que haja transmissão em modo full
duplex (ATMEL, 2011).
São ativados em seguida os bits URSEL, UCSZ0 e UCSZ1 no
registrador UCSRC para que o tamanho dos dados transmitidos seja de 8 bits,
facilitando o controle via caracter da informação (ATMEL, 2011).
Para definição do baudrate a ser trabalhado, que é de 9600, a definição
BAUD_PRESCALE, é dada pela fórmula:
BAUD_PRESCALE = (((F_CPU / (USART_BAUDRATE * 16UL))) - 1)
Após a obtenção desse dado, que pode chegar a 16 bits, é necessária a
divisão em duas partes de 8 bits e colocar cada parte no registrador de byte
alto e de byte baixo (ATMEL, 2011).
O exemplo de codificação em C para o microcontrolador com eco de
informação recebida pode ser encontrado abaixo:
UCSRB |= (1 << RXEN) | (1 << TXEN);
UCSRC |= (1 << URSEL) | (1 << UCSZ0) | (1 << UCSZ1);
UBRRH = (BAUD_PRESCALE >> 8);
UBRRL = BAUD_PRESCALE;
for (;;)
{
while ((UCSRA & (1 << RXC)) == 0) {};
ReceivedByte = UDR;
while ((UCSRA & (1 << UDRE)) == 0) {};
UDR = ReceivedByte;
21
}
Figura 16 - Exemplo de código de configuração serial para o ATMEGA328p
3.3.2.3 ALGORITMO PARA CALIBRAÇÃO DA
FLEXÃO/EXTENSÃO DO JOELHO
A Figura 17 mostra o algoritmo de calibração, usado no jogo Arkanoid,
que é descrito nesse mesmo capítulo, na sessão Software, necessário para
alinhamento adequado do usuário com a angulação em 0º.
i=0
i < 128
SIM
Amostragem
Não
i++
Soma
Média
Transmissão
Figura 17 – Algoritmo de calibração para o jogo Arkanoid
São coletadas 128 amostras quando o usuário do equipamento
apresentar uma flexão de 0°, fazendo a média para subtração futura em cada
amostragem que implique na movimentação do jogo. A Figura 18 resume o
processo de amostragem descrito.
22
intcaliark(void)
{
ADMUX &= 0b11110000;
ADMUX |= 0b00000011;
for(i=0,pm=0;i<128;i++)
{
sdch();
while((ADCSRA & ( 1 << ADIF )) ==0) {}
pm += ADCH;
}
pm = pm >> 7;
mux = 0;
return 0;
}
Figura 18 – Código de calibração Arkanoid
O registrador ADMUX seleciona o terceiro canal do AD para captar o
dado vindo do potenciômetro que serve para multiplexarmos o único ADC
presente no microcontrolador em 8 entradas distintas.
3.3.2.4 ALGORITMO PARA CALIBRAÇÃO DA
ABDUÇÃO/EXTENSÃO DA PERNA
Na Figura 19 é mostrado o algoritmo de calibração, usado no jogo Alvo,
que também será descrito nesse mesmo capítulo, na sessão Software,
necessário para alinhamento adequado do usuário com a angulação em 0º.
intcalitarget(void)
{
int before;
ADMUX &= 0b11110000;
ADMUX |= 0b00000001;
for(i=0,pm=0;i<128;i++)
{
sdch();
while((ADCSRA & ( 1 << ADIF )) ==0) {}
23
pm += ADCH;
}
pm = pm >> 7;
before = pm;
mux = 0;
return 0;
}
Figura 19 – Algoritmo para calibração no jogo do Alvo
Em seguida é feita a média de 128 amostras, para normalização
futura.
3.4 SOFTWARE
Nessa sessão é descrito o processo de construção do software no
computador para a elaboração dos jogos, tratamento dos dados, desenho de
gráficos, análise e geração de relatórios.
3.4.1 DESCRIÇÃO DO SOFTWARE
A plataforma de desenvolvimento do software é o Microsoft Visual Studio
2010. É uma IDE de desenvolvimento dedicada ao .NET Framework 4.0, que
suporta uma série de linguagens de programação entre elas o Visual Basic
.NET, Visual C++, e C# (C Sharp), sendo uma poderosa ferramenta de
desenvolvimento, de fácil uso e permite ao desenvolvedor mais praticidade e
rapidez (MICROSOFT, 2011).
A linguagem de programação escolhida para o desenvolvimento do
software é o C# (C Sharp). C# é uma linguagem de programação orientada a
objetos, fortemente tipada, desenvolvida pela Microsoft como parte da
plataforma .NET Framework. Sua sintaxe orientada a objetos é baseada no
C++, e inclui influências do Java (MICROSOFT, 2011).
O Microsoft .NET Framework 4.0 é um vasto conjunto de bibliotecas
unificadas desenvolvido pela Microsoft. Ele visa uma plataforma única de
desenvolvimento e execução de sistemas e aplicações. Todo código gerado
para .NET pode ser executado em qualquer dispositivo que possua o .NET
Framework instalado (MICROSOFT, 2011).
24
O sistema de Banco de Dados que será utilizado é o MySQL (MYSQL,
2011). MySQL é um sistema de gerenciamento de banco de dados (SGBD)
que utiliza a linguagem SQL como interface. É um software livre, baseado na
GPL (General PublicLicence), é um Banco de Dados amplamente usado e um
dos mais populares do mundo (MICROSOFT, 2011).
Características principais do MySQL:
Portabilidade (suporta qualquer plataforma atual);
Compatibilidade (existem drivers ODBC, JDBC ,.NET, etc.);
Controle Transacional;
Triggers.
A interface gráfica do usuário com o computador é feita através do
Microsoft XNA framework que serve para o desenvolvimento de jogos para PC
com Microsoft Windows (MICROSOFT, 2011).
O XNA é uma plataforma de desenvolvimento, formada pelos seguintes
componentes:
XNA Game Studio: IDE de desenvolvimento baseado no Microsoft Visual
Studio;
XNA Framework: Conjunto de classes necessárias para a execução de
um jogo XNA;
XNA Content Pipeline: componente de gerencia de conteúdo e artefatos
do projeto. Como imagem (JPG, PNG, BMP, etc.), modelos 3D (.X,.FBX,
etc.).
O diagrama mostrado na Figura 20 – ilustra as principais camadas do
XNA Framework. O nível mais baixo é a plataforma de APIs nativas onde o
XNA Framework é construído. O Núcleo é a primeira camada propriamente dita
do XNA Framework, é ele que fornece as funcionalidades das APIs da
Plataforma de forma gerenciada. As extensões têm a finalidade de facilitar o
trabalho do desenvolvedor. Ele é responsável pelo gerenciamento de janelas,
inicialização do DirectX e otimização de conteúdos.
25
Figura 20 - Principais Camadas do XNA Framework (MICROSOFT, 2011)
3.4.2 ARQUITETURA DO SOFTWARE
O software recebe a informação do hardware via porta serial, essa
informação corresponde a um controle para algum objeto na interface gráfica.
O software recebe constantemente informações, e além de interagir com os
objetos do jogo, têm a função de analisar e armazenar informações referentes
aos movimentos do paciente. Como mostra a Figura 21. O fluxograma desta
figura mostra a alocação de recursos iniciais do software na qual é necessário
para o início da sessão, a escolha do paciente, a seleção do jogo e o comando
de início. Após essa sequência ser estabelecida, a comunicação serial é
iniciada, os recursos são alocados e dá-se o início ao processamento gráfico
para exibição do jogo proposto na tela.
26
Figura 21 - Fluxograma de funcionamento do software de simulação
3.4.3 INICIALIZAÇÃO DOS JOGOS
O fluxograma apresentado na Figura 22, ilustra a interface básica de
início de todos os jogos. No primeiro momento são manualmente configurados
os parâmetros de cada jogo, ou seja, ao escolher um jogo o usuário tem uma
tela com vários parâmetros a serem configurados, como por exemplo, o tempo
de duração de movimentos, velocidades, etc.
Após a configuração dos parâmetros é iniciado a Comunicação Serial. O
software recebe uma informação dizendo se há ou não comunicação, não
existindo comunicação, é mostrada uma mensagem de erro, havendo
comunicação, é iniciada a leitura dos dados da serial, e a execução do jogo
escolhido.
No início padrão dos jogos, o processo repete-se e consiste em
configuração de transmissão, seguido de checagem de início de porta serial e
27
após isso são calibrados os jogos em processo estático, para captura do
ângulo inicial. Após a finalização da calibração os jogos estão preparados para
serem iniciados.
Inicio
Configura
parâmetros do jogo
Inicia Comunicação
Serial
Existe
comunicação
Não
Mensagem de Erro
Sim
Inicia Calibração
Atualiza
ângulos
Recebe
dados da
serial
Inserido
ângulo
máximo
aparente
Inserido
ângulo
mínimo
aparente
Executa jogo
Figura 22 - Início Padrão dos Jogos
Todo o processo descrito acima ocorre de forma manual e é relacionado
às configurações inseridas pelo fisioterapeuta.
3.4.4 COMUNICAÇÃO SERIAL
O fluxograma mostrado na Figura 23, detalha a comunicação serial,que
utilizará a biblioteca System.IO.Ports do Microsoft .NET Framework
(MICROSOFT, 2011).
Primeiramente é criada um objeto da classe SerialPort da
System.IO.Ports, a classe SerialPort recebe parâmetros como, nome da porta,
28
Bound Rate (Taxa de transmissão), paridade, timeout de escrita e leitura, e etc.
Estes parâmetros são mostrados na Figura 23, na linguagem C# (lê-se CSharp) abaixo:
SerialPortmySerialPort = new SerialPort("COM1");
mySerialPort.BaudRate = 9600;
mySerialPort.Parity = Parity.None;
mySerialPort.StopBits = StopBits.One;
mySerialPort.DataBits = 8;
mySerialPort.Handshake = Handshake.None;
Figura 23 - Parâmetros da porta Serial.
Em seguida é verificado se a porta pode ser aberta para comunicação
com o método SerialPort.Open(), caso seja verificado erro uma exceção ocorre
e o usuário é informado através de uma mensagem na tela.
Recebida a informação, um método para separar os dados é iniciado.
Esse método vai receber o byte que veio de forma serial como parâmetro, na
qual será decomposto. Os três primeiros bits indicam qual é o movimento, e os
outros cinco qual é a extensão do movimento. O processo explicado é
mostrado em formato de fluxograma conforme a Figura 24.
29
Inicio
Configurações da
Serial
Porta esta pronta
para leitura
Não
Erro
Sim
Recebe
dados da
serial
Separa os dados
Envia os dados
para o Jogo
Figura 24 – Comunicação Serial
3.4.5 JOGOS
Foram propostos 2 jogos, Arkanoid e Alvo. O primeiro com o objetivo de
exercitar os músculos de quadríceps no movimento de flexão e extensão do
joelho. O segundo com o objetivo de exercitar o músculo sartório no movimento
de extensão e abdução da perna.
São descritos os jogos construídos para a execução dos exercícios
propostos.
3.4.5.1 ALVO
Conforme a Figura 26, consiste em uma tela com um alvo na parte
superior e uma mira embaixo. Subindo a perna, o usuário deve alinhar a mira
com o alvo. O usuário deve manter a perna erguida o maior tempo possível,
quando a mira sair do alvo o software armazena no banco de dados o tempo
que a mira ficou no alvo.
30
Figura 25 – Tela do jogo Alvo
No início do jogo a mira está na parte debaixo da tela e o alvo estará na
parte superior da tela do jogo, quando o jogador alinhar a mira com o alvo o
tempo irá começar a contar enquanto a mira estiver no alvo o evento fica
habilitado incrementando uma variável a cada um segundo.
Para fins somente visuais, a cada cinco segundo que a mira estiver no
alvo é realizado um disparo.
O funcionamento do jogo, descrito na Figura 25, pode ser resumido em:
- Início de um tempo global de expiração da sessão pré-configurada.
- Com o acelerômetro verifica-se a inclinação da perna é proporcional à
aceleração disposta pelo sensor. Se sim, outro contador é iniciado por
um tempo padrão de 5 segundos em que o usuário consegue manter a
perna estendida com a mira no alvo. Se o tempo é atingido, o índice +1
é computado para a sessão e gravada em banco de dados, caso
contrário, o contador de tempo é reiniciado.
31
Inicio
Tempo para
acabar a
sessão
Contador de tempo
da sessão
Mostra ângulo da
perna
Mira chegou ao
alvo
Sim
Atualiza posição
da mira
Recebe
dados da
serial
Não
Não
Conta
Tempo
Mostra tempo da
mira no alvo
Saiu do alvo
Sim
Armazena tempo
Acabou tempo
da sessão
Sim
Fim
Figura 26 - Fluxograma Jogo Do Alvo
Este é um importante exercício para fortalecer os músculos da coxa,
descritos no Capítulo 2 (Fundamentação Teórica) já que o paciente após uma
cirurgia do joelho fica muito tempo sem exercitá-los.
O objetivo deste exercício é manter a perna erguida o máximo de tempo
possível, baseando-se no princípio de que o músculo contraído por certo
período de tempo, aumenta a elasticidade, logo aumenta a sua resistência
(GRAAFF, 1942). O software armazena este tempo para que o fisioterapeuta
32
possa verificar o grau de resistência que o paciente adquiriu ao longo das
sessões de exercícios.
3.4.5.2 ARKANOID
O Arkanoid é um jogo simples, que consiste em uma esfera, blocos
coloridos e uma raquete como mostram a Figura 27. O objetivo é a raquete
rebater a esfera para ela se chocar com os blocos coloridos, o choque da
esfera com um bloco faz o bloco sumir, até destruir todos os blocos.
A raquete é controlada de acordo com os movimentos de flexão e
extensão do joelho. Colisões com blocos e erros computarão pontos para
análise, proporcionando dados para o processo estatístico.
No contexto em que está inserido o trabalho, o movimento de flexão e
extensão do joelho, movimentam a raquete que está no jogo de forma linear
conforme a limitação do usuário estabelecida no momento de calibração para o
jogo. Dado ao fato que há movimentação de forma contínua na tela, o usuário
deve movimentar o joelho, flexionando-o ou não evitando que o mesmo atinja a
face inferior da tela, sob penalidade de perda de pontos. Toda vez que o
artefato é rebatido com sucesso, são computados pontos, que ao final da
sessão estabelecida serão gravados para geração de relatórios.
É adotado o critério de pontuação no jogo para a análise de recuperação
do usuário da plataforma. Quanto mais pontos o usuário fizer durante as
sessões que executou, significa que melhor está sua qualidade motora.
Para critério de adaptação do exercício com o jogo, é possível selecionar
diferentes níveis de velocidade do artefato, aumentando assim a dificuldade do
jogo. Esse critério deve ser estabelecido pelo fisioterapeuta que está aplicando
a sessão.
33
Figura 27 – Jogo Arkanoid
Após a calibração é iniciado o jogo Arkanoid, o fluxograma da Figura 28
detalha seu funcionamento básico.
O fisioterapeuta seleciona o tempo que deve durar a sessão e sua
velocidade. Após isso, o processo de calibragem de máxima e mínima
extensão e flexão do joelho é iniciado. Em posso desses dados a plataforma se
adapta com as características do usuário (limitações).
É iniciado em então o jogo e o processo de verificação de colisões dos
blocos até que o tempo determinado da sessão seja expirado. Logo após,
todos os dados de flexão e extensão do joelho, que são designados pelo
ângulo de flexão e extensão que o usuário consegue abrir, são gravados em
banco de dados para a geração de relatórios.
34
Inicio
Recebe tempo
de duração da
sessão
Recebe os
angulos minimo
e maxímo da
calibração
Armazena
Ângulo
Calcula ângulo
Bola destruiu
bloco
Sim
Pontua
Não
Atualiza posição
da raquete
Bola encostou
no chão
Sim
Recebe
dados da
serial
Penalizado
Acabou tempo
da sessão
Sim
Fim
Figura 28 - Fluxograma do jogo Arkanoid
3.4.6 DIAGRAMA DE CLASSES E ENTIDADE
RELACIONAMENTO
O diagrama de classes é uma forma de representação que auxilia a
compreensão de todas as entidades ou interfaces que estão envolvidas no
projeto de forma gráfica (JONHSON et al, 2002).
Na Figura 29, é mostrado o diagrama das classes das telas que foi
utilizado como base para concepção do projeto. Todas as classes dependem
da classe do MainForm, é através dela que são acessados todas as
funcionalidades do software. Esta classe se comunica com as bibliotecas de
classes do XNA e de gravação de dados.
35
MainForm
+IniciaSessao()
+EncerraSessao()
+EscolheJogo()
+GravaNoBanco()
Reports
CadastroDeUsuario
ConfiguracaoSerial
Graficos
-angulo
+EscolheUsuario()
+EscolheTipoRelatorio()
+GeraRelatorio()
+SalvaUsuario()
+ExcluiUsuario()
+Salva()
+ExibeGrafico()
Calibrador
-maxAngulo
-minAngulo
+Calibra()
Figura 29 – Diagrama de classes - Tela
A classe principal, MainForm, controla através do método IniciaSessao(),
o início do contador de tempo da sessão que foi estabelecida, o método
EncerraSessao(), faz o oposto.
Após o início da sessão é necessário escolher o jogo para iniciar o
protocolo corretamente e alocar recursos para coleta de dados no banco de
dados. Toda a vez que a sessão é terminada, a função GravaNoBanco() é
chamada automaticamente.
Para a geração de relatórios, há a classe Reports, que com seus
métodos para filtro em banco de dados são escolhidos os usuários da sessão
executada, o tipo de relatório e geração do mesmo, propriamente dita.
São apresentadas telas com respectivas classes para cadastro de
usuários da plataforma e configuração feitas na porta Serial. Os gráficos que
são exibidos em tela são unicamente tratados pelo método ExibeGráfico() da
classe Gráficos.
Os parâmetros de calibração da plataforma que variam de usuário para
usuário são tratados pela classe Calibrador, seus atributos de ângulo e o
método de calibração que coleta os dados de menor e maior movimentação
possível do usuário.
Na Figura 30, é mostrado o diagrama de classes da biblioteca dos jogos.
A classe IniciaJogos gerencia os eventos dos jogos e é acessada pela tela
principal, é dessa forma que é explicado o motivo de não ser possível acessar
as classes do XNA de uma classe externa.
Cada jogo (Alvo e Arkanoid), possui sua própria classe que na
construção recebe os valores da classe Calibrador para os atributos
anteriormente obtidos. Nelas são controlados o encerramento dos jogos e
também o fim da comunicação serial com seus respectivos métodos.
36
IniciaJogos
-maxCalibrado
-minCalibrado
+FechaJogo()
+IniciaJogo()
Alvo
Arkanoid
-maxCalibrado
-MinCalibrado
+Encerra()
+FechaSerial()
-maxCalibrado
-minCalibrado
+Encerra()
+FechaSerial()
Figura 30 – Diagrama de Classes – Jogos
A Figura 31 ilustra o modelo de entidade relacionamento das tabelas do
sistema. Existem três tabelas a do usuário, da sessão e o desempenho por
sessão.
Figura 31 – Modelo Entidade-Relacionamento
A abstração das classes acima em entidades, mostra como é a estrutura
de banco de dados utilizada para a gravação de todos os dados da sessão e a
possibilidade futura de geração de relatórios.
3.5 PROTOCOLO DE COMUNICAÇÃO
Para que haja a transmissão de dados coletados do paciente na qual
está acoplado o microcontrolador e deve-se envia-los ao computador, é
utilizada a comunicação serial direta USART para transmissão dos dados entre
o microcontrolador conectado aos sensores para o módulo XBee e do XBee
para o computador via interface RS-232.
O XBee, que é um kit que utiliza o protocolo ZigBee, definido pela IEEE
802.15.4 implementa o controle de fluxo de sinais transmitidos
37
automaticamente, tornando o processo de envio de dados transparente para o
usuário que faz a sua interligação (DIGI, 2011).
É utilizada a configuração de transmissão de 9600 bauds por segundo,
não utilizando controle de paridade e utilizando somente um bit de parada. A
comunicação funciona em modo full-duplex, ou seja, pode haver envio de
recebimento dos dados ao mesmo tempo.
O processo de comunicação cliente/servidor (Microcontrolador / PC)
acontece da maneira abaixo:
Cliente envia caracter „c‟ e depois „x‟ para ser reconhecido, espera
receber um „t‟ e um „x‟ do servidor para poder fechar a autenticação. Após
ocorrer a autenticação o cliente sempre envia um caracter „c‟ antes do
caracterer com o dado propriamente dito e espera receber um „t‟ para confirmar
o recebimento do dado e continuar a transmissão. Se não houver confirmação,
ocorre uma retransmissão.
Descrição do byte que contém os dados, conforme a tabela abaixo:
7 6 5 4 3 2 1 0
I I I I I M M M
Tabela 2 – Protocolo de comunicação
Bits(0..2) – Indica qual é o movimento – Varia de 0 a 7.
Bits(3..7) – O valor de incremento ou decremento do movimento –
Inteiro, varia de 0 a 31.
Movimentos:
0 – Extensão do joelho.
1 – Flexão do joelho.
2 – Adução positiva do quadril.
3 – Adução negativa do quadril.
4 – Extensão positiva do quadril.
5 – Extensão negativa do quadril.
38
4 TESTES
Após a construção do dispositivo foram feitos alguns testes de uso do
equipamento e autonomia de funcionamento, com a finalidade de mostrar
utilização qualidades do sistema
4.1 USANDO O EQUIPAMENTO
O acoplamento do equipamento na perna foi executado de forma
confortável e ergonômica, possibilitando a facilidade de movimentação do
membro sem maiores esforços. É possível utilizar a joelheira para o
acompanhamento do andar do usuário devido a presença do acelerômetro de
três eixos.
Figura 32 – Vestindo a joelheira
Conforme a Figura 32, o equipamento após construído, é colocado na
perna do usuário. Devido a leveza do equipamento, os ângulos de
movimentação são livres.
39
4.2 AUTONOMIA DO SISTEMA (TEMPO DE UTILIZAÇÃO)
O tempo médio de duração da bateria para o funcionamento total do
equipamento é de 4 horas consecutivas com sessões de 30 minutos cada.
É possível deste modo, operar o equipamento durante 8 sessões de
exercícios sem que haja a necessidade de manutenção.
120
100
80
60
40
20
0
1
2
3
4
5
10
20
40
80
160
180
200
220
240
Figura 33 – Tempo de vida da bateria da plataforma em minutos
Note que no gráfico da Figura 33, é ilustrada o percentual disponível de
energia da bateria ao longo de 4 horas consecutivas de uso do equipamento ao
longo dos minutos de sessões. A escala do gráfico é logarítmica por facilidade
de desenho. No eixo das ordenadas é mostrado o percentual relativo ao
decaimento da carga máxima da bateria ao longo do tempo em minutos (eixo
das abscissas).
Foram mensurados os níveis de tensão de três baterias normais (em
funcionamento) com coletas de amostras de 10 em 10 minutos ao longo de 3
dias.
40
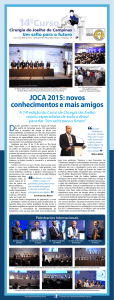
5 RELATÓRIOS DE PROGRESSO
Os resultados são apresentados ao fisioterapeuta em forma de
histogramas por sessão e ao longo de várias sessões. No gráfico da Figura 34
é apresentada a evolução de um paciente ao longo de algumas sessões de
flexão e extensão durante o jogo Arkanoid.
Para o movimento de extensão, verifica-se inicialmente que o usuário
um pouco limitações, o ângulo de extensão do joelho aumenta de acordo com
o passar das sessões.
Figura 34 - Histograma ao longo de sessões de flexão e extensão
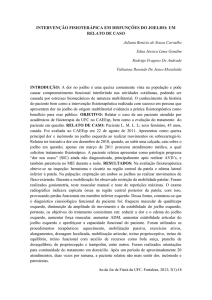
Na Figura 35, são mostrados os dados referentes a uma sessão
específica, onde são notadas várias amostras com baixo ângulo de
movimentação, ou seja, a amplitude com que o usuário consegue realizar o
movimento de flexão e extensão é pequena, indicando uma possível atrofia do
músculo.
Neste caso o paciente concentrou seus movimentos em pequenos
ângulos, ou seja, as condições do jogo Arkanoid (flexão e extensão)
necessitaram que o paciente realizasse mais movimentos de flexão.
41
Figura 35 - Histograma por sessão de flexão e extensão
No gráfico da Figura 36, são mostrados os dados de uma sessão de
movimentos de abdução durante o jogo do Alvo. Este é um importante
exercício para fortalecer os músculos da coxa descritos no Capítulo 2, pois o
paciente após uma cirurgia do joelho fica muito tempo sem exercitar estes
músculos.
O objetivo deste exercício é manter a perna erguida o máximo de tempo
possível. Então o software armazena este tempo. O gráfico abaixo é um
histograma de uma única sessão de abdução, logo, são mostrados quantos
segundos o paciente manteve a perna arguida e com que frequência. Note que
há uma frequência maior de resistência de 3 segundos ao longo de uma
sessão. Deste modo esta interferirá com maior frequência na média da sessão.
Figura 36 - Histograma por sessão de Abdução
42
No gráfico da Figura 37, é mostrada a evolução ao longo das sessões.
Fica visível a gradual melhora do paciente. No início, ele mantêm a perna
erguida durante poucos segundos, então ele gradualmente vai aumentando o
tempo até manter uma regularidade.
Figura 37 – Histograma ao longo de sessões de Abdução
Neste caso é vista a melhora do usuário ao longo das sessões
praticadas com o dispositivo.
43
6 CUSTOS
São mostrados abaixo, todos os custos com materiais para o
desenvolvimento completo do projeto:
Material
2acelerêmetros
2Xbee - Zigbee
Imposto Xbee e 2 FSR
2 MAX 232
Frete - Fedex
2 AVR ATMEGA328p
1potênciometro
10 x Cap1uF
Crystal 18,4320 MHz
Crystal 14,56 Mhz
Indutores e capacitore
Placas de cobre padrão
Soquetes, barra de pinos, osciladores
Capacitores, indutores, e resistores
Protobee 5V e USBXBEECON
Fluxo de solda
Papel Glossy 30 folhas
Patola
Baterias
Plugs, parafusos, borns, velcro, elastico
TOTAL
Preço
(R$)
33,27
30,63
155,00
5,00
53,40
15,58
15,00
0,20
3,00
2,00
6,00
20,00
15,00
25,00
149,00
12,00
19,90
15,00
3,00
Quantidade
2
2
1
2
1
2
1
10
1
1
1
1
1
1
1
1
1
1
2
25,00
1
Preço Total (R$)
66,54
61,25
155,00
10,00
53,40
31,16
15,00
2,00
3,00
2,00
6,00
20,00
15,00
25,00
149,00
12,00
19,90
15,00
6,00
25,00
692,25
Tabela 3 - Custos
O gasto total com componentes é de R$ 692,25, sendo que o maior
gasto é com impostos e componentes importados.
44
7 CONCLUSÃO
O uso de exercícios no processo de reabilitação é de extrema
importância no período de tratamento de lesões no joelho. Conforme a própria
história mostra, desde os períodos medievais essa prática obteve sucesso.
A interatividade adotada na cinesioterapia em questão é fator motivante
para a execução de exercícios com maior frequência, empenho e vontade. É
importe ressaltar que métodos interativos em exercícios apresentam melhores
resultados e são muito utilizados na atualidade.
Foi desenvolvida uma plataforma completa que conta com auxílio da
interatividade através de jogos, para auxiliar no processo de recuperação do
joelho de forma mais rápida e menos entediante, conforme própria pesquisa,
feita na sessão 3.2, com uma joelheira com sensores e um módulo transmissor.
A joelheira mostrou-se prática, leve e de fácil uso. A liberdade de
movimentos possibilita o uso do equipamento em atividades além das
projetadas, como por exemplo, a análise dos movimentos de andar. Essa tarefa
só é possível devido a presença do acelerômetro de 3 eixos que está presente
no projeto.
Foi possível desenvolver com facilidade novas versões de firmware para
o microcontrolador e software para o computador com notável simplicidade e
sem alterações de hardware, devido à quantidade de sensores usados e a
versatilidade da biblioteca XNA, da Microsoft, respectivamente.
Resultados são simulados, obtidos e gravados em banco de dados,
possibilitando uma análise longa e duradoura de antigas sessões executadas.
A plataforma possibilita ao profissional fisioterapeuta, que colocando
com precisão e metodicamente o equipamento, obtenha dados precisos de
angulações do paciente e sua evolução ao longo das sessões, tornando-se
uma ferramenta muito útil e vantajosa, que sem via de dúvidas tornará a vida
humana melhor.
Os resultados obtidos tanto no teste de stress do equipamento quando
na duração da bateria, mostram a possibilidade de uso do equipamento a longo
prazo em várias sessões. É importante ressaltar que com os dados obtidos
pela plataforma é possível gerar uma ampla diversidade de gráficos baseados
em histogramas e temporais, na qual torna possível a análise de evolução do
paciente ao longo do tratamento. Desta forma é possível verificar e chegar a
conclusão do estado de evolução do usuário da plataforma de forma simples
rápida, sem auxílio de fichas de acompanhamento.
45
É proposto como forma de implementação futura, a possibilidade de
coletar dados de descolamento horizontal da perna com o uso do acelerômetro
que a plataforma já possui. Deste modo a construção de mais jogos, em
exercícios diferentes com maiores tipos de relatórios é viável e torna-se
possível.
46
8 REFERÊNCIAS
TEIXEIRA, Salmela L. F.;OLIVEIRA, E. S. G.;SANTANA EGS, Resende GP.
Fortalecimento muscular e condicionamento físico em hemiplégicos. Acta
fisiátrica. 2000; 2-3.
Souza SRS, Oliveira CA, Mizuta NA, Santos MH, Moreira AP. Reabilitação
Funcional para Membros Superiores pós Acidente vascular Encefálico.
Ver. Fisioterapia Brasil 2003; 4(3). 5-6.
Santana JM, Santana Filho VJ, Cândido EA, Freire RF. Eletroestimulação
Funcional no controle da espasticidade em Paciente Hemiparético.
Senna-Fernandes V, França D, Cortez CM, Silva G, Pereira F. Acupuntura
cinética: Tratamento sistemático do aparelho locomotor e neuromuscular
da face por acupuntura associada à cinesioterapia. Ver. Fisioterapia Brasil
2003; 4(3). 2-3.
Guimarães LS, Cruz MC. Exercícios terapêuticos, a cinesioterapia como
importante recurso da Fisioterapia. Lato & Sensu, Belém. 2003. 4(1). 1-2.
Souza SRS, Oliveira CA, Mizuta NA, Santos MH, Moreira AP.
ReabilitaçãoFuncional para Membros Superiores pós Acidente Vascular
Encefálico.Rev Fisioterapia Brasil 2003;4(3):195-199.
Biasol, Maria Cristina. Tratamento fisioterápico na terceira idade.Rev
Brasileira de FisioterapiaNovembro/2007; 62 -68.
Gravina MER – Lesões por esforços repetitivos: Uma reflexão sobre os
aspectos psicossociais.Saúde e Sociedade 11(2) 65-87,2002. 16 – 17
Kapandji, A. L – Fisiologia Articular. Volume 2, 5ed. Editora Panamericana.
Cap 1 – 2.
Van De Graaff, Kent M. – Anatomia Humana, 1942.
Sensor,
Ultra
miniature
size
vibration
www.eea.epson.com/portal/pls/portal/docs/1/424992.PDF
(disponível em 20/03/2011).
gyrosensor
-
MMA7260Q, XYZ Three-AxisLow g Acceleration Sensorhttp://www.freescale.com/files/sensors/doc/fact_sheet/MMA7260QFS.pdf
(disponível em 20/03/2011).
MEKA (Mechatronic device for Knee
http://www.hmw.it (disponível 25/03/2011)
Analysis)
-
Humanware
-
47
Standard 408 FSR - http://www.interlinkelec.com/Product/Standard-408FSR(disponível em 20/03/2011).
ATMEL AVR
ATMEGA328pwww.atmel.com/dyn/resources/prod_documents/8271S.pdf
(disponível em 20/03/2011)
802.15.4 – ZigBeePhysicalLayer - http://www.digi.com/technology/rfarticles/wireless-zigbee.jsp
(disponível em 20/03/2011)
MICROSOFT VISUAL STUDIO
br/vstudio/dd441784.aspx
2011 - http://msdn.microsoft.com/pt(disponível em 21/03/2011).
MICROSOFT XNA
LIBRARYhttp://www.microsoft.com/downloads/en/details.aspx?FamilyID=8078
2277-d584-42d2-8024-893fcd9d3e82
(disponível em 21/03/2011).
MYSQL 5.0
21/03/2011).
-
http://www.mysql.com/downloads/mysql/
(disponível
Microsoft XNA Framework Redistributable 3.1 http://www.microsoft.com/downloads/en/details.aspx?FamilyID=53867a2ae249-4560-8011-98eb3e799ef2
(disponível em 20/03/2011)
ANATOMIA - http://neopage.vilabol.uol.com.br/ANATOMIA.htm - (disponível
em 10/06/2011).
AVR FREAKS (disponível em http://www.avrfreaks.net 13/04/2011)
BIOMECÂNICA - http://www.gustavokaempf.com.br/joelho/biomecanica (Disponível em 20/06/2011).
KNEEHAB – CURRENT BODY http://www.currentbody.com/rehab-painrelief/kneehab-knee-rehab.html - (Disponível em 06/06/2011).
em
48
9 ANEXOS
9.1 DIAGRAMAS DE PINOS E CONEXÕES
Figura 38 - Ponte de Wheatstone com o potenciômetro acoplado à
joelheira
Figura 39 - Conexão do microcontrolador ATMEGA 328p
49
Figura 40 - Componente de transmissãoXbee e pinos utilizados
Figura 41 - Acelerômetro MMA7260 e conexões com o microcontrolador
50
Figura 42 - MAX232 e interligações com o microcontrolador e
computador
9.2 LISTA DE COMPONENTES E MÓDULOS NECESSÁRIOS
1 acelerômetro Freescale MMA7260Q;
1 microcontroladoreAtmel AVR ATMEGA328p;
2 módulos Maxstream XBee WRL-08664 Chip Antenna;
1 Driver RS-232 MAX232;
2 Conversores de tensão LM317T;
2 Cristais de quartzo de 10 MHz;
2 capacitores de 22pF;
Resistores de 470, 1k, 5k e 10 k Ω;
1 Conversor USB-Serial;
1 Computador com interface USB;
2 baterias de 9V;
1 placa de cobre de 20 x 20 cm;
Joelheira rígida fechada com haste;
Cabos elétricos maleáveis;
1 potenciômetro
51
9.3 LISTA DE RECURSOS DE LABORATÓRIO NECESSÁRIOS
Fonte de alimentação ajustável;
Osciloscópio;
Multímetro de mesa;
Alicate de corte;
Alicate de bico;
Mesa lógica digital;
Gravador USBasp para microcontrolador ATMEGA;
9.4 PLACA DE CIRCUITO IMPRESSO
Abaixo, todo o processo de montagem da placa do equipamento e todo
o processo envolvido.
Figura 43 – Placa de circuito impresso desenvolvida para o projeto
52
Figura 44 – Placa em cobre (Já corroída)
Figura 45 – Soldagem dos componentes em placa
53
Figura 46 – Montagem em Caixa
9.5 RECURSOS, BIBLIOTECAS
CONSTRUÇÃO DO SOFTWARE
Microsotf Visual Studio 2010
Microsotf XNA GameStudio
Microsotf XNA Framework
Microsotf .NET Framework
MySQL Database
MySQL Communit Server 5.5
MySQLConnector/NET
NECESSÁRIOS
PARA
A
54
9.6 REQUISITOS PARA EXECUÇÃO E USO DO SOFTWARE
Microsoft Windows (XP ou superior).
Microsoft .NET Framework.
Microsoft Redistributable 3.1 (ou superior)
DirectX 9.0 (ou superior)
Memória: 256 MB ou superior.
9.7JOELHEIRA CONCLUÍDA
Abaixo, a foto do projeto com a sua “cara final”.
Figura 47 – Joelheira concluída
55
9.8 IMPLEMENTAÇÕES FUTURAS
Abaixo, a descrição do algoritmo para desenvolvimento futuro para
coleta dos movimentos de adução/extensão lateral do quadril.
O deslocamento em metros do membro em um eixo é dado pela
equação abaixo:
É notado um somatório que simboliza a integral dupla do movimento de
aceleração, para assim obter o deslocamento, deste modo é feita a verificação
de quanto da aceleração da gravidade está sendo calculada pela divisão por
800 mV, então ocorre a multiplicação pela aceleração da gravidade de 9,8
m/s^2, ou seja, é sabível qual é a aceleração do sistema.
Em posse da aceleração é feito o cálculoda área no período de
amostragem de 0,000016 segundos utilizando uma soma de Riemann,
conforme a Figura 48 obtendo assim a velocidade em função do tempo.
Repetindo o processo pela soma de Riemann da velocidade, é obtido o
deslocamento real do objeto em função do tempo.
Figura 48–Soma de Riemann
O algoritmo que pode serimplementado em firmware está contemplado
no fluxograma da figura 49, que mostra o caminho que seguiráa informação,
sendo inicialmente efetuada uma coleta dos sensores iniciais, armazenamento
em variáveis para que num intervalo de tempo mínimo ocorra a calibração do
56
sistema completo, sendo este composto da normalização dos valores com os
membros monitorados em relaxação e parados.
Após a calibração inicia-se um processo repetitivo de coleta de dados
dos sensores, normalização, e somatório até que o período se complete
totalmente.
INICIO
SENSORES
ARMAZENAR
DADOS
CALIBRAÇÃO
SENSORES
Σ
SIM
TEMPO
< 1 us?
RESET DE
ESTRUTURAS DE
DADOS
NÃO
ARMAZENAR
DADOS
SERIALIZAÇÃO
AGUARDE 1 us
ENVIE VIA SERIAL
OS DADOS
NÃO
RECEBEU
CONFIRMAÇÃO?
SIM
FIM
Figura 49 – Fluxograma de Riemann