Revista Ciencias Técnicas Agropecuarias
ISSN: 1010-2760
[email protected]
Universidad Agraria de La Habana Fructuoso
Rodríguez Pérez
Cuba
Serafim, Milson Evaldo; Tadeu Vitorino, Antonio Carlos; Alves de Souza, Cristiano Márcio; Dias do
Prado, Esmael; Venturin, José Carlos; Takeo Yamamoto, Natanael
Desenvolvimento de um penetrógrafo eletromecânico de bancada
Revista Ciencias Técnicas Agropecuarias, vol. 17, núm. 1, 2008, pp. 61-65
Universidad Agraria de La Habana Fructuoso Rodríguez Pérez
La Habana, Cuba
Disponível em: http://www.redalyc.org/articulo.oa?id=93217113
Como citar este artigo
Número completo
Mais artigos
Home da revista no Redalyc
Sistema de Informação Científica
Rede de Revistas Científicas da América Latina, Caribe , Espanha e Portugal
Projeto acadêmico sem fins lucrativos desenvolvido no âmbito da iniciativa Acesso Aberto
Revista Ciencias Técnicas Agropecuarias, Vol. 17, No. 1, 2008
REPARACIÓN Y TECNOLOGÍA MECÁNICA
REPAIRING AND MECHANICAL TECHNOLOGY
NO TA
TÉCNICA
Desenvolvimento de um penetrógrafo
eletromecânico de bancada1
Desarrollo de un penetrógrafo electromecánico
de banco
Development of an electro mechanic counter
penetrograph
Milson Evaldo Serafim2,Antonio Carlos Tadeu Vitorino 3, Cristiano Márcio Alves de Souza4*, Esmael
Dias do Prado4, José Carlos Venturin5 e Natanael Takeo Yamamoto 6
RESUMO. Este trabalho teve por objetivo desenvolver um penetrógrafo eletromecânico de bancada, com velocidade constante de penetração,
destinado a realização de testes de resistência à penetração de solo com estrutura preservada. O aparelho possui um sistema mecânico de elevação,
destinado a transformar o movimento rotacional do motor de passo em linear na haste, um sistema de controle do motor, uma célula de carga,
um sistema automático de aquisição de dados e um chassi. O sistema mecânico teve seu torque e rotação mantidos constante por meio de um drive
conectado ao motor. O interfaceamento foi realizado usando o software DIAS, com saída em display de cristal líquido LCD 16x2 e botões de
comando. Afim de verificar a exatidão dos dados obtidos com o uso do penetrógrafo desenvolvido, foram realizados ensaios em amostras de
Latossolo Vermelho Distroférrico, e seus dados comparados com aqueles obtidos de um penetrógrafo padrão. O equipamento desenvolvido
apresentou satisfatória precisão, pois não foi observada diferença significativa entre seus resultados e aqueles obtidos de penetrógrafo comercial.
O aparelho desenvolvido apresentou rendimento médio de oito amostras por hora, superior ao equipamento comercial.
Palavras-chave: compactação, penetrometria, projeto de máquinas.
RESUMEN. El objetivo de este trabajo fue desarrollar un penetrógrafo electromecánico de bancada, con velocidad constante de penetración,
destinado a realizar pruebas de resistencia a la penetración de suelos con la estructura preservada. El aparato posee un sistema mecánico de
elevación, destinado a transformar el movimiento rotacional del motor de paso en lineal del asta, un sistema de control del motor, una célula de
carga, un sistema automático de adquisición de datos y un chasis. El torque y rotación del sistema se mantuvieron constante, usando un drive
conectado al motor. La interface fue realizada usando el software DIAS, con salida para un display de cristal líquido LCD 16x2 y botones de
comando. Para verificar la exactitud de los datos obtenidos con el uso del penetrógrafo desarrollado, fueron realizados ensayos en muestras de
suelo Latosólico Rojo Distroférrico, y sus datos comparados con los obtenidos de un penetrógrafo padrón. El equipamiento desarrollado presentó
una satisfactoria precisión, pues no fue observada diferencia significativa entre sus resultados y aquellos obtenidos con el penetrógrafo comercial.
El aparato desarrollado presentó rendimiento médio de ocho muestras por hora, superior al equipamiento comercial.
Palabras clave: compactación, penetrometria, proyecto de máquinas.
ABSTRACT. The objective this work was to develop an electromechanic counter penetrograph, with a constant speed penetration to test the
resistance to penetration in soil samples with preserved structure. The apparatus has a mechanic elevation system in order to transform the step
rotational engine motion of the stick into a linear one, a system to engine control, a load cell, an automatic data system and a chassis. The
Recibido 12/09/06, aprobado 12/07/07, trabajo 13/08, nota técnica.
1
Extraído da Dissertação de Mestrado do 1º autor, apresentada à UFGD.
2
Mestre em Agronomia pelo PPGA/FCA/UFGD, Dourados, MS. E-: [email protected]
3
Professor Adjunto, FCA/UFGD, 79804-970 Dourados, MS.
4
Graduando em Ciência da Computação, UEMS, Dourados, MS.
5
Técnico em Mecânica. Instrutor de Formação Profissional, SENAI/Dourados, Dourados, MS.
6
Doutorando em Agronomia, PPGA/FCA/UFGD. Bolsista de FUNDECT-MS.
* Bolsista do CNPq.
61
Revista Ciencias Técnicas Agropecuarias, Vol. 17, No. 1, 2008
mechanic system rotation speed and torque were kept constat through a drive connected to the engine. For the interfacing the software DIAS
was used, with a liquid crystal display LCD 16x2 and some commanding bottoms. In order to check to precision of the obtained data with the
developed penetrograph, some tests performed with Distroferric Red Latossol samples and its data were compared to the standard penetrograph
data. The equipment developed showed satisfactory precision, and no significat difference between its data, and the commercial penetrograph
data was observed. The developed apparatus productivity was of 8 samples per hour.
Keywords: compacting, penetrability, machine design.
INTRODUÇÃO
A qualidade física do solo é preponderante para a expressão
do máximo potencial produtivo de uma cultura. A resistência
do solo à penetração (RP) constitui um dos atributos físicos
considerados na avaliação da qualidade do solo de sistemas
conservacionistas. O estudo da qualidade física do solo, com
base na resistência à penetração, tem sido utilizado (Camargo
& Alleone, 1997; Silva, 2004). No entanto, a limitação principal
nestes estudos tem sido relacionada à necessidade de uma
metodologia de consenso entre pesquisadores, fato que tem
sido amenizado com o surgimento de penetrômetros com
velocidade de penetração constante, os quais possibilitam
obter resultados mais confiáveis e comparáveis entre as
diversas pesquisas (Camargo & Alleone, 1997; Bianchini et
al., 2002).
Embora com limitações, a resistência à penetração pode
ser usada para a indicação comparativa das condições da
compactação, em solos de mesmo tipo, mesmo teor de água e
manejo, devido à facilidade e rapidez com que numerosas
medidas podem ser realizadas (Fidalski et al., 2006; Pereira et
al., 2002). Os diferentes modelos de penetrômetros usados
na determinação da resistência do solo à penetração têm
dificultado a interpretação dos resultados. Assim, Herrick &
Jones (2002) recomendaram a utilização de penetrômetro
estático com velocidade constante de penetração tanto por
sua maior precisão como também para padronizar as
determinações.
Medidas realizadas no solo, tais como resistência à
penetração (Prado et al., 2002), pressão de preconsolidação
(Dias Junior, 2000), resistência ao cisalhamento e resistência
de agregados, são amplamente utilizadas para avaliar a
estrutura do solo (Guerif, 1994; Imhoff, 2002). Resistência à
penetração é mais freqüentemente usada para avaliar a
compactação do solo e para correlação com o crescimento de
raiz, di st ribuição no perfi l e estru tura do sol o. Os
penetrômetros utilizados na obtenção desta variável
possuem diferentes diâmetros e ângulo de cones. A maioria
dos penetrômetros de campo
tem diâmetros de cone de 11 a
o
o
25 mm e semi-ângulos 15 a 30 (Campbell & O’Sullivan, 1991;
ASAE, 1993). Contudo, leituras obtidas
com cones de seme0
angulos mais próximos de 30 e menor diâmetro tem
apresentado melhor correlação com crescimento radicular
(Voorhees et al., 1975; Whalley et al., 2000). Tais conlusões
impulsionaram o surgimento de penetrófrafos de bancada.
Os penetrômetros de bancada com velocidade constante
de penetração têm sido os mais aceitos para determinação da
resistência à penetração do solo em amostras indeformadas,
utilizadas nos estudos de Intervalo Hídrico Ótimo (IHO).
Tormena et al., (1998) utilizou um penetrógrafo de bancada
com velocidade de penetração
constante, diâmetro de cone
0
de 4 mm e semi-ângulo de 30 . Na literatura são encontrados
62
outros trabalhos de IHO em que foram utilizados pentrógrafos
com especificações e funcionamento semelhantes (Imhoff et
al., 2001; Araújo et al., 2005; Leão, 2002; Beutler et al., 2006).
Este trabalho teve por o bjetivo desenvolver um
penetrógrafo eletromecânico de bancada, de fácil manuseio e
adequado para determinação da resistência à penetração em
amostras de solo indeformadas.
MATERIAL E MÉTODOS
O trabalho foi realizado no Laboratório de Física do Solo
da Facu ldade de Ci ências Agrári as da Universi dade
Federal da Grande Dourados e na Unidade do SENAI Dourados, MS.
Na elaboração do projeto do equipamento algumas
co ndi ções foram pré-estabelecidas visando conferir
funcionalidade e precisão, as quais seguem: a) apresentar
formato compatível com o uso em bancada, de fácil mobilidade
e robustez suficiente para permitir as mudanças; b) contar
com botões de controle e um display interativo, que permita
as operações desejadas de forma rápida e fácil; c) um sistema
de aquisição de dados, SPIDER8 , conect ado a um
microcomputador que permita leituras e armazenamento em
intervalos de tempo. Foi utilizado o software CATMAN 5.0
na aquisição de dados obtidos do equipamento desenvolvido;
d) dispor de uma plataforma para acomodação da amostra de
solo; e) dispor de uma célula de carga com alta sensibilidade,
com erro inferior a 0,1% das leituras; f) contar com um sistema
mecânico de elevação, tipo rosca-sem-fim (descida e
elevação), que proporcione um deslocamento preciso da haste
de penetração, com velocidade constante e conhecida; g)
sistema mecânico estável com mínima transmissão de
vibrações que possam proporcionar interferências nas leituras
da célula de carga.
A fim de atender as condições apresentadas acima, o
projeto contemplou os requisitos mecânicos, elétricos e
eletrônicos buscando otimizar o uso de componentes
comerciais, bem como de materiais de fácil aquisição.
A geometria do aparelho foi ajustada de modo a conferir
um percurso de 100 mm na haste de penetração, sendo esta
usinada com 4 mm de diâmetro, 100 mm de comprimento e
com o ângulo do cone de 60º. As dimensões totais do aparelho
foram de 600 mm de altura, 350 mm de profundidade e 300 mm
de largura.
A velocidade de deslocamento da-1haste do aparelho pode
ser ajustada na faixa de 5 a 30 mm min . O movimento da haste
com a ponta cônica é dado pela rotação da rosca-sem-fim. A
rosca-sem-fim foi construída com passo de 2,5 mm e seu
deslocamento é definido pela rotação do motor, que foi
programado de modo a permitir ajustes entre 30 e 130 rpm.
Para medir a carga aplicada sobre o solo foi utilizada uma
célula de carga, modelo SV20, com capacidade de 0,196 kN. O
Revista Ciencias Técnicas Agropecuarias, Vol. 17, No. 1, 2008
modelo possui compensação automática para reduzir os erros
devido à variação de temperatura.
A base do aparelho foi feita em chapa de aço de 5/16’’,
com formato retangular de 300 x 350 mm. A coluna de
sustentação do penetrógrafo era formada por um tubo de aço
inox, com 63,5 mm de diâmetro total e 3 mm de espessura. Para
segurança do operador, as engrenagens e o motor foram
encerradas em uma caixa construída em chapa de aço, com
pintura eletrostática.
Os botões de controle são de fácil acesso e acionamento.
O posicionamento e retirada das amostras durantes os testes
foi considerado simples. A base recebeu uma pintura metálica
para facilitar a limpeza.
A montagem do aparelho foi considerada simples,
demandando pouco esforço e tempo. Apresenta fácil conexão
e interface do conjunto computador-sistema de aquisição de
dados-penetrógrafo. O transporte do penetrógrafo pode ser
feito por sua base ou coluna de sustentação.
O sistema de elevação que confere o percurso a haste
de penetração é dotado de uma rosca-sem-fim, construída
com engrenagem helicoidal cônica e passo de 2,5 mm. O
parafuso desta rosca-sem-fim possui uma engrenagem
movida por um parafuso “sem-fim” ligado ao eixo do motor.
E ste conj u nto pi nhão /co ro a apresenta relação de
t ransmissão de 30 : 1 . Os desenho s det al hado s de
construção dos componentes mecânicos do aparelho são
apresentados em Serafim (2007).
O aparelho está equipado com um motor elétrico de passo,
modelo HT23-400, com rotação nominal de 2.200 rpm e torque
máximo de 1,86 Nm, sendo que o torque demandado para
trabalho no eixo de elevação é de 5 Nm correspondendo a um
to rqu e de 0,1 8 Nm no eixo do moto r. Segundo as
especificações do fabricante este torque é fornecido para
rotações inferiores a 1.800 rpm.
O motor possui um “drive” que disponibiliza uma corrente
constante de 2 A, conforme descrito por Serafim (2007). O
acionamento bifásico das bobinas propiciou passos 1,8 graus,
obtendo-se um ganho de torque no eixo do motor, bem como
uma redução da amplitude das vibrações mecânicas do
sistema.
Ao energizar o microcontrolador são exibidas as telas
de apresentação do software e em seguida é verificado se
o sistema de elevação encontra-se na posição inicial,
-1
remetendo ordem de recuo na velocidade de 12 mm min ,
caso não esteja. A verificação do posicionamento inicial é
feita por um sensor óptico que verifica uma régua que
possui furos que delimitam o curso. Uma vez no ponto
inicial, ele apresenta o menu principal esperando um
co mando de sta rt. Uma vez ini ciado o percurso ele
apresenta a velocidade de avanço escolhida.
As entradas de comando do aparelho são dadas por
três botões de controle e o interfaceamento é dado pelo
software DIAS, descrito em Serafim (2007), com saída em
um visor de LCD 16x2. A escolha das opções de trabalho
desejadas é obtida por meio dos botões de controle, tendo
cada um as seguintes funções: Botão 1 - start/retorno e
parada enquanto pressionado; Botão 2 - aumento do
avanço; Botão 3 - redução do avanço.
O código fonte do software DIAS para o microcontolador
foi escrito em ASSEMBLER, para arquitetura RISC e compilado
pelo software livre Mplab 7. O arquivo compilado em
hexadecimal foi transferido para o microcontrolador utilizando
o software IC-PROG 1.05D, que envia os sinais elétricos para
a porta serial onde esta conectado um circuito programador
de PIC, modelo JDM.
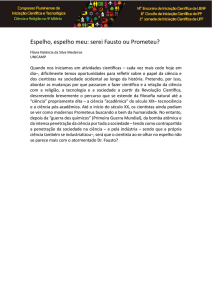
A calibração do aparelho consistiu em leituras fornecidas
pela célula de carga em milivolts (mV) para as respectivas
massas. Foram correlacionadas leituras da célula de carga
com massas padrão de 0,05 até 8,0 kg, colocadas sobre a
célula de carga (Figura 1).
FIGURA 1. Curva de calibração da célula de carga SV20.
A resistência do solo à penetração (ASAE, 1993) foi
determinada do quociente da carga lida pela célula e a área
transversal do cone da haste do penetrógrafo, conforme
Equação 1. A área transversal do cone era de 0,126 cm2,
com uma ponteira de 4,0 mm de diâmetro. As medidas foram
realizadas com um paquímetro, com 0,1 mm de resolução. A
profundidade da ponta da haste foi determinada em função
do tempo e da velocidade de descida da ponta cônica, na
amostra durante o ensaio (Serafim, 2007).
RP 9,8067 10 5
m
A
(1)
em que,
RP: Resistência do solo à penetração, MPa
m: Massa obtida da célula de carga,
g
2
A: Área transversal do cone, cm .
Os resultados obtidos com o aparelho desenvolvido
foram comparados com aqueles obtidos de um penetrômetro
de bancada padrão, modelo MA-933. Utilizando 32 amostras
de solo, retiradas em um Latossolo Vermelho Distroférrico,
textura muita argilosa, as quais foram submetidas ao teste de
resistência à penetração (RP) nos dois aparelhos. Na
comparação entre as curvas de dados de resistência à
penetração obtidos por meios dos penetrômetros, foi utilizado
o método estatístico proposto por LEITE & OLIVEIRA (2002).
O método estatístico é uma combinação do teste F F(H0) = (
– )´(Y1´Y1)(– )/2QMR ~ F(2,n – 2) (GRAYBILL, 1976) e do
teste t aplicado ao erro médio t e ( e 0)/Se . O erro relativo
médio entre as curvas de dados foi determinado como:
63
Revista Ciencias Técnicas Agropecuarias, Vol. 17, No. 1, 2008
n
e
(y x /x )/n , considerando-se que o erro e
i
i i
i y i x i /x i , é uma variável que segue uma distribuição normal e ocorre
l
ao acaso,
pode-se testar a hipótese H e 0 . Foi utilizado um nível de significância de 5% de probabilidade nas comparações.
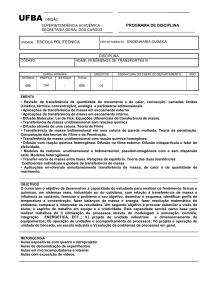
RESULTADOS E DISCUSSÃO
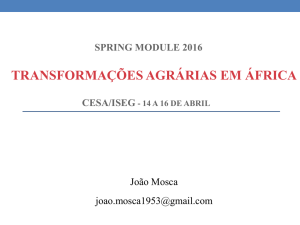
A execução do projeto do penetrógrafo eletrônico de bancada foi bem sucedida e o produto resultante é apresentado na
Figura 2. A caixa branca em pvc, na parte superior do aparelho, contém os componentes eletrônicos, refrigerado a ar pelo
acionamento de um cooler, instalado de maneira que quando acionado retira o ar aquecido do interior da caixa.
FIGURA 2. Penetrógrafo eletromecânico desenvolvido: a) vista lateral esquerda; b) vista lateral direita.
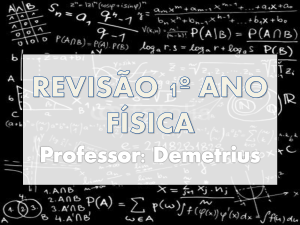
O aparelho desenvolvido apresentou funcionamento
estável em to das as etapas das análises e rendimento
horário de 8 amostras. Esse rendimento foi superior ao
obtido com o uso do aparelho padrão. O maior rendimento
de trabalho deve-se a possibilidade de ajuste da velocidade
de descida e da de ret orno em at é 4 0 mm mi n -1 . A
comparação dos dados obtidos por meio dos aparelhos na
determinação da resistência à penetração pode ser observada na Figura 3. Os valores obtidos com o aparelho
desenvolvido não diferiram estatisticamente daqueles
obtidos com o aparelho padrão.
RP aparelho desenvolvido (kPa)
10000
8000
6000
A velocidade de descida da haste de penetração, para
o ensaio em laboratório foi de 10 mm min-1, permitindo
variação entre 3 e 20 mm min -1. Assumindo os valores
anteriormente citados, referentes ao passo da rosca de
2,5 mm e a redução conferida pelo parafuso sem-fim de
30:1, a velocidade de percurso de 10 mm min-1 é atingida
com o motor trabalhando a 120 rpm.
Na Figura 4 são apresentados os valores de resistência
a penetração em função do tempo de duração do teste. As
leituras de resistência à penetração obtidas nos teste
apresentam valores crescentes para os primeiros milímetros, correspondentes a periferia da amostra. Em geral, os
valores tendiam a se estabilizar a partir dos 30 segundos
do início do teste, correspondendo a 5 mm de penetração
da ponta do cone, concordando com Bradford (1986) que
aponta o final do efeito da periferia entre 5 e 10 mm da
superfície da amostra.
4000
2000
0
0
2000
4000
6000
8000
10000
RP aparelho padrão (kPa)
FIGURA 3. Comparação de resistências do solo à penetração
(RP), obtidas com os dois penetrógrafos.
FIGURA 4. Valores de resistência à penetração em função do
tempo de duração do teste.
64
Revista Ciencias Técnicas Agropecuarias, Vol. 17, No. 1, 2008
CONCLUSÕES
AGRADECIMENTOS
• O penetrógrafo desenvolvido apresentou fácil operação,
elevado rendi mento, fácil aju ste de velocidade de
penetração, sendo as suas leituras equivalentes àquelas
obtidas com um penetrógrafo padrão.
• Ao SENAI/Dourados-MS, Brasil, pelo apoio à pesquisa, no desenvolvimento do penetrógrafo.
• À CAPES, pela bolsa de mestrado concedida ao Primeiro
Autor.
REFERÊNCIAS BIBLIOGRÁFICAS
AMERICAN SOCIETY OF AGRICULTURAL ENGINEERS – ASAE: Soil Cone Penetrometer Standards, 40th ed. ASAE, St.
Joseph, MI. pp. 820-821, 1993.
ARAÚJO, M.A; C.A.TORMENA; A.P. SILVA: «Propriedades físicas de um Latossolo Vermelho distrófico cultivado e sob mata
nativa», Revista Brasileira de Ciência do Solo, 28(2):337-345, Viçosa, 2005.
BEUTLER, A.N.; J.F. CENTURION; A.P. SILVA & J.C. BARBOSA: «Intervalo hídrico ótimo e produtividade de cultivares de
soja», Revista Brasileira de Engenharia Agrícola e Ambiental, 10(3): 639–645, 2006
BIANCHINI, A.; J.C.S. MAIA; P.S.G. MAGALHÃES; N. CAPPELLI & C.K. UMEZU: «Penetrógrafo eletrônico automático»,
Revista Brasileira de Engenharia Agrícola e Ambiental,6(2):.332-336, 2002.
CAMARGO, O.A. e L.R.R. ALLEONI: Compactação do solo e desenvolvimento das plantas, 132 pp., Piracicaba: Degaspari, 1997.
CAMPBELL, D.J. e M.F. O’SULLIVAN: «The cone penetrometer in relation to trafficability, compaction and tillage», In: Smith,
K.A., Mullins, C.E. (Eds.), Soil Analysis, Physical Methods. Marcel Dekker, pp. 399–429., N.Y.,1991.
DIAS JUNIOR, M. S.: «Compactação do solo», In: Novais, R. F.; ALVAREZ, V. V. H.; SCHAEFER, C. E. G. R.: Tópicos em ciência
do solo, V. 1, pp.55-94, Sociedade Brasileira de Ciência do Solo: Viçosa, MG: 2000.
FIDALSKI, J.; C.A. TORMENA; A.C.A. GONÇALVES e R.S. OLIVEIRA JUNIOR: «Variabilidade espacial da resistência do solo
à penetração e da taxa de estratificação de carbono orgânico do solo em um Latossolo Vermelho eutroférrico», Ciência Rural,
Santa Maria, 36(6): 1773-1779, 2006.
GRAYBILL, F.A.: Theory and application of the linear model, 704 pp., Belmont: Duxbury Press, 1976.
GUÉRIF, J.: «Effects of compaction on soil strength parameters», In: SOANE, B. D.; OUWERKERK, C. van. (Ed.), Soil compaction
in crop production, pp. 191-214, Amsterdam: Elsevier, 1994.
HERRICK, J.E.; T.L.A. JONES: «Dynamic cone penetrometer for measuring soil penetration reistance», Soil Science Society of Am.
J., v.66, pp.1320-1324, 2002.
IMHOFF, S., C.: «Indicadores de qualidade estrutural e trafegabilidade de Latossolos e Argissolos Vermelhos» 104 f. ,Tese (Doutorado
em Agronomia), Esc. Superior de Agricultura “Luiz de Queiroz”, Piracicaba-SP., 2002.
IMHOFF, S.; P.A. SILVA; M.S. DIAS JUNIOR & TORMENA, C.A.: «Quantificação de pressões críticas para o crescimento das
plantas», Revista Brasileira de Ciência do Solo, 25:11-18, 2001.
LEITE, H.G. and F.H.T. OLIVEIRA: «Statistical procedure to test identity between analytical methods», Commun. Soil Sci. Plant
Anal.,.33 (7/8):1105-1118, 2002.
PEREIRA, J.O.; J.A.C. SIQUEIRA; M.A. URIBE-OPAZO & S.L. SILVA: «Resistência do solo à penetração em função do sistema
de cultivo e teor de água do solo» Revista Brasileira de Engenharia Agrícola e Ambiental, 6 (1): 171-174, Campina Grande,
P.B., 2002.
PRADO, R. M.; C.G. ROQUE & Z.M. SOUZA: «Sistemas de preparo e resistência a penetração e densidade de um Latossolo
Vermelho eutrófico em cultivo intensivo e pousio», Pesquisa Agropecuária Brasileira, 37(12): 1795-1801, 2002.
SERAFIM, M. E.: «Desenvolvimento de um penetrógrado de bancada visando a determinacao dointervalo hídrico otimo (IHO) em
diferentes sistemas de producao», 79 f., Disssertação (Mestrado em Agronomia), Universidade Federal da Grande Dourados/
Faculdade de Ciências Agrárias, Dourados, MS.,2007.
SILVA, V.R.; J.M. REICHERT; D.J. REINERT; A.P. SILVA; J.A. BRAIDA & D.R. KAISER: «Variabilidade espacial da resistência
do solo à penetração em plantio direto», Ciência Rural, 34 (2):399-406, 2004.
TORMENA, C.A.; A.P. SILVA & P.L. LIBARD: «Caracterização do intervalo hídrico ótimo de um Latossolo Roxo sob plantio
direto» Revista Brasileira de Ciência do Solo, 22:573-581, 1998.
TORMENA, C.A. e G. ROLOFF: «Dinâmica da resistência à penetração de um solo sob plantio direto», Revista Brasileira de
Ciência do Solo, v. 20, pp.333-339, Campinas, 1996.
VOORHEES, W.B.; D.A. FARRELL and W.E. LARSON: «Soil strength and aeration effects on root elongation», Soil Sci. Soc. Am.
Proc. 39, 948– 953. 1975.
WHALLEY, W.R.; J. LIPIEC; W. STE-PNIEWSKI and F. TARDIEU, F.: «Control and measurement of the physical environment in
root growth experiments», In: Smit, A.L., Bengough, A.G., Engels, C., van Noordwijk, M., Pellerin, S., van de Geijn, S.C. (Eds.),
pp., 76-112, Root Methods a Handbook. Springer-Verlag, Berlin, 2000.
65