Universidade Federal do Paraná
Setor de Ciências da Terra
Departamento de Geomática
CARLOS AURÉLIO NADAL
ASTRONOMIA DE POSIÇÃO
VARIAÇÃO DAS COORDENADAS CELESTES
CURITIBA
2002
VARIAÇÃO DAS COORDENADAS CELESTES
Carlos Aurélio Nadal
Engenheiro Civil
Mestre em Ciências Geodésicas
Doutor em Ciências Geodésicas na Área de Geodésia Aplicada à Engenharia
Professor Titular do Departamento de Geomática do Setor de Ciências da Terra
da Universidade Federal do Paraná.
Catalogação na Fonte
Tânia Barros Baggio
CRB – 9/760
Nadal, Carlos A.
Astronomia de Posição - VARIAÇÃO DAS
COORDENADAS CELESTES/Carlos A. Nadal. 1a Ed.
Curitiba, Departamento de Geomática-UFPR: 2002
32p,:il.
Inclui bibliografia
1. Variação das coordenadas celestes 2. Astronomia de
Campo 3. Astronomia Geodésica I. Título
CDD 20 – 256.6
CARLOS AURÉLIO NADAL
2
VARIAÇÃO DAS COORDENADAS CELESTES
SUMÁRIO
TITULO
1. INTRODUÇÃO
2. HISTÓRICO DA VARIAÇÃO DE COORDENADAS EQUATORIAIS
3. MATRIZES DE ROTAÇÃO E REFLEXÃO
4. TRANSFORMAÇÃO DE COORDENADAS CELESTES UTILIZANDO
MATRIZES DE ROTAÇÃO.
4.1 Transformação de coordenadas horizontais em horárias e vice-versa
4.2 Transformação de coordenadas horárias em equatoriais e vice-versa
5. MOVIMENTO DE PRECESSÃO E NUTAÇÃO DA TERRA5.
MOVIMENTO DE PRECESSÃO E NUTAÇÃO DA TERRA
5.1 Precessão Luni-solar
5.2 Efeitos da precessão luni-solar nas coordenadas equatoriais
5.3 Movimento de nutação da Terra
5.4 Precessão planetária
5.5 Precessão geral – Formulação matemática
6. PARALAXE ESTELAR
6.1 Paralaxe anual
6.1 Paralaxe diária
7. ABERRAÇÃO ESTELAR
7.1 Aberração anual
7.2 Aberração diária
8. MOVIMENTO PRÓPRIO DAS ESTRELAS
9. DEFLEXÃO GRAVITACIONAL DA LUZ
10. MOVIMENTOS DOS PÓLOS
11. CALCULO DAS COORDENADAS APARENTES DE UMA ESTRELA
12. EXERCICIO RESOLVIDO
13. EXERCICIOS PROPOSTOS
REFERÊNCIAS BIBLIOGRÁFICAS
CARLOS AURÉLIO NADAL
3
PÁGINA
04
05
07
11
11
12
14
15
17
19
20
21
23
23
25
27
30
30
30
31
31
32
35
VARIAÇÃO DAS COORDENADAS CELESTES
1. INTRODUÇÃO
O estudo dos sistemas de coordenadas utilizados na Astronomia Esférica,
parte da premissa que os planos fundamentais do sistema de coordenadas
equatorial e eclíptico são invariáveis, mas essa suposição somente é válida em
função da acuracidade das observações, para um intervalo de tempo de algumas
horas.
Hoje os objetivos da Geodésia ultrapassam uma visão até pouco suficiente
para solução prática de problemas de posicionamento. A UAI (União
Astronômica Internacional) e a UGGI (União Geodésica e Geofísica
Internacional) trabalham em conjunto como o objetivo de criar um sistema de
coordenadas inercial celestes, isto é, um sistema que permaneça invariável no
tempo, e com respeito ao qual seja possível o estudo dos movimentos da Terra,
do Sistema Solar, de nossa galáxia a Via Láctea, e a detecção de movimentos
intrínsecos próprios das estrelas. Este sistema é consistente em sua definição
conceitual, mas utópico em sua realização prática,.
Pode-se conceituar sistema de coordenadas equatoriais celestes
como sendo um sistema definido matematicamente, tridimensional com origem
no centro da Terra, com o eixo das abscissas (x) apontando para o ponto vernal,
o eixo das cotas (z) apontando para o pólo norte celeste e o eixo das ordenadas
(y) formando um terno cartesiano ortogonal dextrógiro. Neste caso o sistema é
denominado de geocêntrico. A origem do sistema pode ser transladada para o
centro de massa do Sol, sendo o sistema denominado de heliocêntrico, ou ainda
transladado para o centro de massa do sistema solar (que se encontra nas
proximidades do centro de massa do Sol), sendo neste último caso denominado
de baricêntrico. A definição conceitual de um sistema na língua inglesa é
transcrita por uma única palavra “system”. Para se realizar ou materializar esta
definição de forma prática, determinam-se as coordenadas equatoriais de estrelas
e de objetos celestes muito distantes da Terra, como quazares. Na língua inglesa
a realização prática de um sistema de coordenadas é representada por uma única
palavra: “frame”.
Nos processos observacionais utilizam-se os mais diversos métodos e
instrumentos. Tradicionalmente utilizava-se somente a parte do espectro
eletromagnético correspondente a luz visível emanada dos objetos celestes e
aquele sistema era determinado com instrumentos de passagem como círculo
meridiano (Nadal, 1992), astrolábio Danjon (Clozet, 1982). Na atualidade
utilizam-se dados obtidos com o satélite astrométrico HIPPARCUS para
materialização do sistema, combinado com posições de radio-fontes distantes.
Um problema de difícil solução é devido ao fato que os objetos celestes
dificilmente emitem duas radiações diferentes o que torna problemática a junção
entre observações em diferentes tipos de radiações.
CARLOS AURÉLIO NADAL
4
VARIAÇÃO DAS COORDENADAS CELESTES
Toda observação é eivada de erros, portanto, as coordenadas observadas
são inicialmente tratadas para a retirada de erros sistemáticos principalmente os
de origem instrumentais, observacionais e naturais como, por exemplo,
inclinação do eixo horizontal, colimação óptica, divisão de círculos graduados,
refração atmosférica, etc. A seguir são tratados estatisticamente os erros
acidentais, resultando nas coordenadas equatoriais com suas respectivas
precisões. Este trabalho é realizado por vários observatórios Astronômicos e
instituições espalhos pela Terra, e por ultimo compilados e tratados globalmente
por organismos filiados a UAI e UGGI, resultando num Catálogo Fundamental,
que é uma lista contendo a posição dos objetos celestes, suas magnitudes, tipos
espectrais movimentos próprios, paralaxes e velocidades radiais.
Espera-se que o Catálogo Fundamental represente integralmente o sistema
conceitual o que, infelizmente não é verdadeiro, fazendo com que o mesmo
tenha uma vida útil de aproximadamente 10 anos. Nesse período geralmente
apresenta uma deteriorização nas posições armazenadas das estrelas. Na
atualidade está em uso o catalogo fundamental FK5, e sendo introduzido o FK6.
Este fato não é novo, o astrônomo e geógrafo da antiguidade HIPARCO,
que viveu cerca de um século e meio antes de nossa era, trabalhando com um
sistema eclíptico de referência, mediu a latitude celeste e a longitude celeste de
estrelas com instrumentos precários e ajuda das mãos. Conseguiu determinar
variações na longitude celeste da estrela SPICA ( Vir) atribuindo-lhe uma
causa aceita em nossos dias.
A partir da utilização de métodos e técnicas refinadas de observação, de
análises globais estatísticas tem-se definido novas causas para os movimentos
terrestres e celestes fazendo com que este seja um dos assuntos atuais da
astronomia de posição.
Há na atualidade uma corrente científica, que não faz distinção entre os
fenômenos geométricos e físicos analisados neste trabalho, efetuando tão
somente uma analise temporal dos dados tratados nos diversos observatórios da
Terra, definindo de forma global equações matemáticas que modelem seus
movimentos, sendo esta uma tendência nos próximos anos.
Neste trabalho discutiremos os embasamentos teóricos e as formulações
práticas para obtenção de coordenadas celestes de estrelas num determinado
instante, necessárias ao posicionamento na Terra, de interesse dos Engenheiros
Cartógrafos.
2. HISTÓRICO DA VARIAÇÃO DE COORDENADAS EQUATORIAIS
As observações na Antigüidade eram conduzidas através da medida de
distâncias angulares entre estrelas e o Sol, utilizando-se de um astro
intermediário como a Lua ou Vênus nas proximidades do crepúsculo. O sistema
de coordenadas eclípticas era o mais utilizado, pois a abstração do pensamento
dos antigos astrônomos neste sistema era facilitada, pela diminuta quantidade de
CARLOS AURÉLIO NADAL
5
VARIAÇÃO DAS COORDENADAS CELESTES
cálculos necessários ao posicionamento de estrelas. Assim imaginando-se que
em seu movimento aparente na esfera celeste o Sol tem latitude celeste igual a
zero e sua longitude celeste varia de aproximadamente 1o por dia, pois o Sol
percorre os 360o da eclíptica em aproximadamente 365 dias; conhecendo-se o
número de dias decorridos desde o equinócio vernal até a data desejada,
determina-se a longitude do Sol. Além disso, no eclipse da Lua, quando se tem o
alinhamento Sol-Terra-Lua, a latitude celeste da Lua vale 0o e sua longitude
celeste difere da longitude celeste do Sol de 180o. Utilizando-se deste conceito e
medindo com as mãos ou com instrumentos rudimentares a distância esférica de
estrelas à Lua eclipsada, Hiparco confeccionou um catalogo com coordenadas
eclípticas destas. Foi possível também a Hiparco comparar a longitude celeste
por ele obtida da estrela Spica no ano 129 a.C. ( = 172o), com a medida por
Timocaris em 283 a.C. que resultou em = 174o.
Hiparco explicou tal variação de 2o em 154 anos a um movimento de
rotação direta da esfera dos fixos ao redor dos pólos da eclíptica, o que
ocasionaria um deslocamento do ponto vernal no sentido retrógrado de
aproximadamente 50/ano. Hiparco catalogou cerca de 1025 estrelas através de
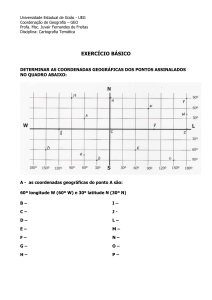
suas coordenadas eclípticas. O sistema de coordenadas eclípticas tem como
plano fundamental a eclíptica que é o plano da órbita da Terra em seu
movimento de translação ao redor do Sol, rebatido na esfera celeste. Na figura
2.1 representa-se este sistema.
N
Plano da eclíptica
S
’
S’
= latitude celeste
= longitude celeste
ponto vernal ou
equinócio vernal
S
Figura 2.1 Sistema de coordenadas eclípticas
A interpretação hoje admitida devida a Copérnico, é que a direção
do eixo de rotação da Terra não é fixa no espaço, seu ângulo com a eclíptica
CARLOS AURÉLIO NADAL
6
VARIAÇÃO DAS COORDENADAS CELESTES
permanece constante, descrevendo um cone de revolução em torno do eixo desta
cuja latitude celeste é o complemento da obliqüidade. O movimento retrógrado
do equinócio a razão de 50/ano resulta numa volta completa deste na eclíptica
em 25800 anos, que é também o período de revolução dos pólos celestes ao
redor dos pólos da eclíptica.
No século XVII suspeitou-se da invariabilidade do plano da eclíptica, os
resultados obtidos anteriormente mostravam o decréscimo de seu valor. Euler
demonstrou, através da teoria das perturbações exercidas pelos planetas no
movimento de translação da Terra, que o plano da eclíptica é móvel e que em
conseqüência a obliqüidade decresce da ordem de 46/século.
No século XVIII Bradley demonstrou que o plano do equador sofre
deslocamentos periódicos de pequena amplitude, sendo o fenômeno denominado
de nutação. Bradley observou a estrela Draconis com o objetivo de determinar
sua paralaxe, por ser esta muito pequena não obteve êxito, descobriu a partir das
observações os fenômenos da aberração e da nutação. Observou que em nove
anos a declinação média da estrela aumentava 18 e diminuía da mesma
quantidade nos próximos 9 anos, associou ao fenômeno da nutação a
retrogradação dos nodos da Lua.
Deveu-se a D’Alambert a teoria do movimento de rotação da Terra pela
mecânica Newtoniana, mostrando os efeitos da perturbação Luni-solar.
Nas últimas décadas teve-se um desenvolvimento acentuado dos
instrumentos de observação, dos métodos e dos cálculos, principalmente com a
entrada de automação de instrumentos astrométricos que resultaram num
incremento nas precisões observacionais. Além disso, a disseminação e o
desenvolvimento do sistema de posicionamento global (GPS), tornaram possível
o monitoramento dos principais movimentos da Terra, culminando com a
criação por parte dos organismos internacionais UAI e UGGI do órgão
denominado de IERS (Sistema internacional de rotação da Terra), que tem
proporcionado o monitoramento continuado dos movimentos de nosso planeta.
3. MATRIZES DE ROTAÇÃO E REFLEXÃO
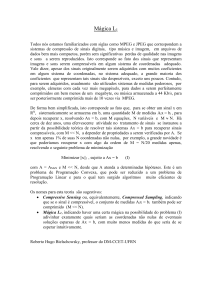
Tomando-se dois sistemas tridimensionais de coordenadas cartesiana
ortogonais com mesma origem porém não coincidentes (figura 3.1). Sejam xp,
yp, zp coordenadas cartesianas do ponto P no sistema oXYZ e x’p, y’p, z’p no
sistema oX’Y’Z’. O problema consiste em: dadas as coordenadas de um ponto
no primeiro sistema, deseja-se as coordenadas deste mesmo ponto no segundo
sistema de coordenadas. Da Geometria Analítica tem-se que [Hatschbach,
1975]:
x’p = xp l11 + yp l12 + zp l13
y’p = xp l21 + yp l22 + zp l23
z’p = xp l31 + yp l32 + zp l33
CARLOS AURÉLIO NADAL
7
VARIAÇÃO DAS COORDENADAS CELESTES
Z
Z’
P
X’
z’p
y’p
zp
o
yp
X
xp
x’p
Y
Y’
Figura 3.1 Sistemas de coordenadas cartesianas tridimensionais ortogonais
onde, lji é o co-seno diretor do ângulo formado entre o eixo respectivo do
sistema oX’Y’Z’ com o eixo do sistema oXYZ, por exemplo que o eixo x’ i
forma com o eixo xi . Sob a forma matricial tem-se que:
x’p
l11 l12 l13
y’p = l21 l22 l23
z’p
l31 l32 l33
xp
yp
zp
ou, de forma simplificada:
Y=LX
Pode ser provado que dos nove co-senos diretores somente três são
linearmente independentes, portanto, conhecidos os três ângulos formados entre
os respectivos pares de eixos dos dois sistemas, os quais são denominados de
ângulos de Euler, é possível a transformação de coordenadas de um sistema para
outro.
Seja, na figura 3.2, dois ternos coincidentes na origem e seus eixos oX e
oX’ coincidentes e os outros eixos formando o ângulo entre si:
CARLOS AURÉLIO NADAL
8
VARIAÇÃO DAS COORDENADAS CELESTES
Z
Z’
o
Y’
Y
X = X’
Figura 3.2 – Rotação em torno do eixo X
Neste caso a matriz L assumirá a seguinte forma:
L=
1
0
0
0 cos sen
0 -sen cos
= R1 ()
Similarmente, obter-se-ia a matriz L para uma rotação em torno do eixo y:
L=
cos 0 -sen
0
1
0
= R2 ()
sen 0 cos
e, em torno do eixo z:
L=
CARLOS AURÉLIO NADAL
cos sen 0
-sen cos 0
0
1
0
= R3 ()
9
VARIAÇÃO DAS COORDENADAS CELESTES
As matrizes R1 (), R2 () e R3 () são conhecidas como matrizes de
rotação.
A convenção adotada neste trabalho para o valor positivo do ângulo de
rotação , é a de que os sistemas devam ser dextrógiros e o ângulo
correspondente à rotação deve ser medido no sentido anti-horário.
Tome-se agora, dois sistemas coincidentes na origem o, com os eixos y e
z coincidentes, e com os eixos oX’ e oX com sentidos opostos (figura 3.3).
Z=Z’
X’
Y =Y’
o
X
Figura 3.3 – Reflexão de eixos coordenados.
Neste caso a matriz dos co-senos diretores assumirá a seguinte forma,
denominada de reflexão do eixo dos x.
L=
-1
0
0
0
1
0
0
0
1
= R1
Para o eixo dos y com orientação contrária tem-se:
L=
1
0
0
0
-1
0
0
0
1
= R2
e, para o eixo dos z da mesma forma que os anteriores tem-se:
L=
CARLOS AURÉLIO NADAL
1
0
0
0
1
0
0
0
-1
= R3
10
VARIAÇÃO DAS COORDENADAS CELESTES
As matrizes R1, R2 e R3 são conhecidas com matrizes de reflexão e
permitem a transformação de sistemas dextrógiros em levógiros e vice-versa.
4. TRANSFORMAÇÃO DE COORDENADAS CELESTES UTILIZANDO
MATRIZES DE ROTAÇÃO.
4.1 Transformação de coordenadas horizontais em horárias e vice-versa
Seja o astro S, referenciado no sistema de coordenadas horizontais
(ox1x2x3), deseja-se transformar estas coordenadas para coordenadas no sistema
de coordenadas horárias (oy1y2y3). Inicialmente, na figura 4.1 mostra-se o
problema.
x3
y3
Z
Pn
S
y1
Q
90-
HS
Hn
x1
Q’
x2 = y2
PS
N
Figura 4.1 Transformação de coordenadas horizontais em horárias.
O vetor posição da estrela no sistema de coordenadas horizontais é dado
pelas igualdades de suas componentes [Hatschbachm, 1975]:
CARLOS AURÉLIO NADAL
11
VARIAÇÃO DAS COORDENADAS CELESTES
x1 = cos h cos A
x2 = cos h sen A
x3 = sen h
(4.1.1)
o vetor posição no sistema de coordenadas horárias é dado por:
y1 = cos cos H
y2 = cos sen H
(4.1.2)
y3 = sen
Ainda, da figura 4.1 para chegar-se ao sistema de coordenadas horárias,
partindo-se do sistema de coordenadas horizontais, necessita-se de uma rotação
com sinal negativo, isto se deve ao fato de que os sistemas são levógiros e a
rotação anti-horária. A transformação pode ser expressa pela equação matricial:
Y = R2 [ -(90- )] X
ou,
Y = R2 ( -90) X
(4.1.3)
Se, por outro lado, deseja-se obter as coordenadas horizontais a partir das
coordenadas horárias, pode-se resolver a equação 4.1.1, explicitando-se X e
utilizando-se a propriedade da matriz ortogonal em que a inversa e sua
transposta são iguais:
X = [R2 ( -90)]-1 Y = [R2 ( -90)]T Y
ou, então:
X = R2 (90- ) Y
(4.1.4)
4.2 Transformação de coordenadas horárias em equatoriais e vice-versa
Seja o astro S, referenciado no sistema de coordenadas horárias (oy1y2y3),
deseja-se transformar estas para coordenadas no sistema de coordenadas
equatoriais (oz1z2z3). Na figura 4.2 mostra-se o problema.
O vetor posição no sistema de coordenadas horárias é dado por:
z1 = cos cos
z2 = cos sen
z3 = sen
CARLOS AURÉLIO NADAL
(4.2.1)
12
VARIAÇÃO DAS COORDENADAS CELESTES
y3 = z3
PN
S
y’1
Q’
Q
z1
y1
W
z2
y2
PS
Figura 4.2 Transformação de coordenadas horárias em equatoriais e vice-versa.
Observa-se que o sistema de coordenadas horárias é levógiro enquanto
que o sistema de coordenadas equatoriais é de orientação dextrógira.
Inicialmente, aplica-se uma reflexão R1 ao primeiro sistema a fim de
transformar sua orientação para dextrógira. Agora se chega ao segundo sistema
por uma rotação em torno do eixo (3) do valor angular Q’, assim, obtém-se a
seguinte equação matricial para a transformação:
Z = R3 (Q’) R1 Y
Como Q’ = 180o – S, onde S é a hora sideral, tem-se:
Z = R3 (180o – S) R1 Y
CARLOS AURÉLIO NADAL
4.2.2
13
VARIAÇÃO DAS COORDENADAS CELESTES
A transformação de coordenadas equatoriais para horária será dada por:
Y = R3 (-S) R2 Z
4.2.3
5. MOVIMENTO DE PRECESSÃO E NUTAÇÃO DA TERRA
Seja a figura 5.1 a seguir onde A1 e A2 representam os planos do equador
celeste nas épocas t1 e t2 respectivamente, E1 e E2 as eclípticas nas mesmas
épocas, M o nodo ascendente de A1 com respeito a A2, N o nodo ascendente de
E1 com respeito a E2, 1 e 2 os equinócios nas datas, é o ângulo formado entre
os dois equadores e o ângulo formado entre as duas eclípticas.
P1
P2
A1
A2
N
1
E1
2
E2
M
Figura 5.1 Representação dos movimentos de planos na esfera celeste
Pode-se representar os elementos: , , 1M, 2M, 1N, 2N em função do
tempo numa série de potências do tipo:
= at + bt2 + ct3 + t1(p) - t2(p)
Similarmente para os outros elementos. Os somatórios representados reúnem os
termos periódicos de t. Aos termos seculares, aqueles dependentes das primeiras
potencias do tempo denomina-se de precessão e os periódicos de nutação. Em
verdade, alguns termos ditos seculares nestas expressões são periódicos de longo
período ou pseudo seculares, sendo que o caso da longitude celestes temos um
termo secular puro devido a variação de 360o em 26000 anos. Geralmente
CARLOS AURÉLIO NADAL
14
VARIAÇÃO DAS COORDENADAS CELESTES
representa-se a precessão por um polinômio de terceiro grau, e a representação
da nutação é mais complexa.
O equador real da Terra é perpendicular ao eixo instantâneo de rotação da
Terra (eixo principal de inércia), a eclíptica real é a cada instante o plano que
contém o raio vetor Terra-Sol e a velocidade orbital da Terra. A aplicação das
leis do movimento kepleriano exige o conhecimento do centro de massa dos dois
corpos envolvidos, neste caso, porém, o centro de massa do sistema Terra-Lua é
que define a eclíptica real.
A eclíptica média difere da real pelo efeito da perturbação planetária
devido principalmente a Vênus e Júpiter.
Denomina-se de coordenadas médias aquelas que diferem da reais pela
precessão. As coordenadas reais ou verdadeiras de uma estrela são afetadas pela
precessão e nutação, enquanto que as médias somente pela precessão.
O ponto vernal real é o nodo ascendente da eclíptica real em relação ao
equador real. Na realidade, os termos que se referem às perturbações planetárias
não são levados em conta nas efemérides, fazendo com que o ponto vernal real
seja o nodo ascendente da eclíptica média em relação ao equador real.
5.1 Precessão Luni-solar
A precessão Luni-solar é devida a atração gravitacional do Sol e da Lua
sobre as protuberâncias equatoriais. Na figura 5.2 mostra-se o modelo de forças
de atração exercida pela Lua sobre o bulbo equatorial da Terra num
determinado instante, sendo que a força centrífuga desta em relação à Terra que
equilibra o sistema.
Neste diagrama nota-se que F1 a força exercida pela Lua no ponto 1 é
maior que a força Fc exercida no centro (c ) da Terra, uma vez que pela Lei da
da atração gravitacional, a força é diretamente proporcional às massas dos
corpos e inversamente proporcional a distância que os separa. Por este mesmo
motivo a força exercida no centro Fc é maior que a força exercida no ponto 2, F2.
PN
q’
F2
Fc
F1
c
2
C
Lua
1
C
C
PS
CARLOS AURÉLIO NADAL
15
q
Plano da eclíptica
VARIAÇÃO DAS COORDENADAS CELESTES
Figura 5.2 Forças de atração gravitacional (F) e força centrífuga (C )
A força centrifuga C é proporcional a massa e a velocidade, e, portanto é
constante nos três pontos analisados. Como resultante tem-se o diagrama
mostrado na figura 5.3.
Lua
N
PN
Plano da eclíptica
R1V
R2H
R2
q’
2
R1
w
c
1
q
R1H
R2V
PS
S
Figura 5.3 Resultantes das forças de atração e centrífuga e suas componentes
Na figura 5.3 nota-se que a resultante R1 está direcionada para fora do
bulbo na direção da eclíptica, o mesmo acontece com R2. Estas resultantes são
decompostas em componentes segundo o equador terrestre R1H e R2H, segundo
uma paralela ao eixo de rotação da Terra R1V e R2V. As componentes R1H e R2H
tendem a deformar a seção transversal da Terra abrindo-a ocasionando o
fenômeno denominado de força de maré. As componentes R1V e R2V formam um
binário cujo braço é o segmento 1-2 que tende a coincidir o plano do equador
com o plano da eclíptica, ou em outras palavras, o eixo de rotação da Terra
(PNPS) tende a coincidir com um eixo eclíptico (NS), que é perpendicular ao
plano da eclíptica. Ocorre, no entanto, que a Terra está animada de um
movimento de rotação que a faz comportar-se como um giroscópio. Pelo
principio da rigidez giroscópica uma força aplicada em um giroscópio desloca-o
no sentido perpendicular a esta força. Assim o que ocorre é que o eixo de
rotação da Terra gira em torno do eixo eclíptico num movimento cônico. Na
explicação acima nos detivemos na Lua, mas deve-se ter claro que o efeito é
uma somatória da atração conjunta com o Sol.
CARLOS AURÉLIO NADAL
16
VARIAÇÃO DAS COORDENADAS CELESTES
O movimento relativo dos três astros Sol, Terra e Lua faz com que a força
de atração sofra variações complexas. Assim o Sol sofre uma mudança de
hemisfério celeste a cada seis meses, enquanto a Lua o faz quinzenalmente, além
do que à distância entre os três astros varia continuamente. Esse movimento
cônico do eixo de rotação da Terra em torno do eixo eclíptico não é regular. Por
aspectos didáticos científicos é desdobrado em uma componente de longo
período (parte secular do movimento) e outra de curto período. A parte secular
do movimento é denominada de precessão luni-solar, enquanto que a parte de
curto período do movimento é denominada de nutação.
Designa-se o eixo de rotação quando sujeito a precessão luni-solar por
eixo de rotação médio e o equador terrestre por equador médio.
5.2 Efeitos da precessão luni-solar nas coordenadas equatoriais
Devido a precessão luni-solar o ponto vernal movimenta-se na esfera
celeste de 50,2”/ano, no sentido retrógrado (contrário ao movimento anual
aparente do Sol), aumentado o valor da ascensão reta e da longitude celeste de
uma estrela.
É importante analisar o fato de que a precessão luni-solar não afeta a
posição do eixo de rotação em relação à própria Terra, mas sim em relação a sua
posição espacial. O equador terrestre neste movimento mantém-se
aproximadamente constante, variando tão somente a posição do ponto vernal.
Pela própria definição de declinação, nota-se que a mesma varia com a
precessão.
A precessão luni-solar altera a posição do ponto vernal, o que por sua vez
ocasiona um deslocamento direto do perigeu, alterando a duração das estações
astronômicas.
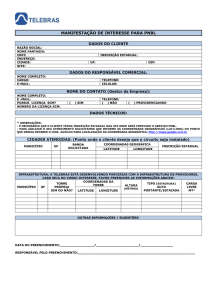
O pólo médio celeste desloca-se na esfera celeste em torno do pólo
eclíptico, completando uma circunferência em 26800 anos. O plano dessa
circunferência é perpendicular ao eixo eclíptico. A amplitude desse movimento
é igual à obliqüidade da eclíptica (w) que vale aproximadamente 23 27. A
figura 5.4 mostra o deslocamento do pólo sul celeste em torno do pólo da
eclíptica.
Nota-se que o pólo sul celeste se aproxima com o passar do tempo das
estrelas cujas latitudes celestes tem valor próximo ao complemento da
obliqüidade da eclíptica (66 33). Na atualidade a estrela Octantis é a estrela
que materializa aproximadamente o pólo sul celeste com precisão de
aproximadamente 1o.
A precessão luni-solar, também causa um deslocamento do ponto vernal
em relação às constelações zodiacais. O ponto vernal é comum aos signos do
zodíaco Aires e Taurus, lembrando que a denominação dos signos foi motivada
pela constelação nele contida no tempo de Hiparco. Nos 21 séculos que nos
separam o ponto vernal movimentou-se de 2100 x 50,3” = 29,5o, ou seja, de
aproximadamente a largura de um signo do zodíaco. Decorre deste fato que na
CARLOS AURÉLIO NADAL
17
VARIAÇÃO DAS COORDENADAS CELESTES
atualidade não há correspondência entre o signo do zodíaco e a constelação de
mesmo nome. Assim, por exemplo, o signo de Áries contém a constelação de
Peixes.
Figura 5.4 Deslocamento do pólo sul celeste devido a precessão luni-solar
Fonte: http://www.if.ufrgs.br/~santiago/lectures/
Pode-se ter ainda, como conseqüência da precessão luni-solar a redução
do ano trópico, que é definido como o intervalo de tempo decorrido entre duas
passagens consecutivas do Sol pelo ponto vernal. Como o Sol e o ponto vernal
se deslocam em sentidos opostos, estes encontrar-se-ão na eclíptica antes que o
Sol complete uma volta de 360o, mas sim o valor de 359 59 09,7, que pode
ser constatada quando compara-se o ano trópico com o ano sideral.
Pode-se enfim, resumir que a precessão luni-solar tem como efeitos:
a) variação de coordenadas equatoriais;
b) variação da duração das estações do ano;
c) deslocamento do pólo celeste;
CARLOS AURÉLIO NADAL
18
VARIAÇÃO DAS COORDENADAS CELESTES
d) deslocamento do ponto vernal em relação às constelações zodiacais;
e) redução da duração do ano trópico.
5.3 Movimento de nutação da Terra.
A parte periódica de curto período do movimento de precessão é
denominada de nutação ou nutação astronômica da Terra. É modelada por séries
trigonométricas cujos coeficientes são determinados por observações
astronômicas. A série atual utilizada como modelo foi determinada por
Seidelmann [Seidelmann, 1982] e é composta por 106 termos associados a
períodos. O período de 18,6 anos é assumido como um ciclo total da nutação. Os
principais termos de nutação são: um termo de período igual a 18.6 anos
(período de precessão da órbita da Lua), um termo de 182.6 dias (meio ano), um
outro de 13.7 dias (meio mês) e um de 9.3 anos (período de rotação do perigeu
lunar).
No estudo da nutação é usual sua decomposição em duas componentes:
nutação em obliqüidade e nutação em longitude . A componente é
devida a elipticidade das órbitas da Terra e da Lua, enquanto é devida a
variação e a inclinação da órbita da Lua em relação à eclíptica e à retrogradação
dos nodos lunares.
Os planos da órbita lunar e da eclíptica formam entre si um ângulo de
aproximadamente 5o. A Lua também apresenta um movimento de precessão que
obriga a linha dos nodos (reta de intersecção do plano da órbita da Lua com a
eclíptica) a girar, e completam um giro em 18,6 anos. Supõe-se que a eclíptica
permaneça imóvel durante o movimento de nutação, porem o equador e o ponto
vernal variam e com eles a obliqüidade da eclíptica e as coordenadas equatoriais
das estrelas.
Na figura 5.5 mostra-se os movimentos de precessão, de nutação e sua
resultante.
precessão
Precessão + nutação
N
P’N
PN
nutação
T
CARLOS AURÉLIO NADAL
19
VARIAÇÃO DAS COORDENADAS CELESTES
Figura 5.5 Movimentos do pólo celeste em torno do pólo da eclíptica
A nutação pode ser calculada pela matriz nutação definida por Muller
(1969) como:
N = R1 (--) R3 () R1 ()
O cálculo de será discutido no item 2.4. Os coeficientes utilizados no
cálculo da nutação pode ser encontrado em Sieldmann (1992) paginas 112 a
115. Para o cálculo da nutação com precisão da ordem de 1", utilizam-se as
expressões:
=(cos()+sen()*sen()*tan())*-cos()*tan()*
=sen()*cos()* + sen()*
onde e devem ser adicionadas às coordenadas médias (corrigidas da
precessão), e que resultarão nas coordenadas aparentes (ou verdadeiras) da
estrela. Os valores de e são encontrados em anuários como o
Astronomical Almanac, ou podem ser calculados de forma aproximada pelas
expressões:
=-0.0048º*sen(125º-0.05295*d)-0.0004º*sen(200,9º+
1.97129º*d)
=0.0026o*cos(125o-0.05295*d)+0.0002o*cos(200.9o+
1.97129o*d)
onde d = Data Juliana - 2451909.5, os argumentos do seno e do cosseno sendo
expressos em graus, e d e d em segundos de arco.
5.4 Precessão planetária
O movimento de um planeta segue aproximadamente a 1 a Lei de Kepler,
onde o planeta descreve uma elipse com o Sol ocupando um dos focos. Esta
idealização realizar-se-ia se somente existisse os dois corpos no espaço. A
presença de um terceiro corpo perturba a órbita elíptica. Designa-se por
precessão planetária a força perturbadora a órbita da Terra (elíptica) efetivada
pelos outros planetas, principalmente Vênus, Marte e Júpiter, e traduz-se num
balanço da eclíptica que determina um deslocamento do ponto vernal no sentido
direto sobre o equador. Ainda em conseqüência da precessão planetária a
obliqüidade da elíptica varia de 48” por século. A obliqüidade da eclíptica oscila
CARLOS AURÉLIO NADAL
20
VARIAÇÃO DAS COORDENADAS CELESTES
entre um máximo de 21o 59’ e um mínimo de 31o 59’ num período de vinte
milênios. A obliqüidade fornecida como constante pelo IAU (1976) para a data
J2000,0 tem o seguinte valor:
2000 = 23 26 21,448
A expressão polinomial que permite o cálculo da obliqüidade da eclíptica
numa data especifica é fornecida pela expressão:
= 23 26 21,448 - 46,8150 T – 0,00059 T +0,001813 T
sendo T o número de séculos julianos decorridos de J2000,0 até a data da
observação:
JD – 2451545,0
T =
36525
Assim, por exemplo, para se calcular a obliqüidade da eclíptica para o dia 21 de
setembro de 2002, onde a Data Juliana (JD) é igual a:
JD = 2452538.5
sendo,
T =0,027186858
resulta em:
2002,72 = 23 26 20,175
5.5 Precessão geral – Formulação matemática
A precessão geral surge quando são considerados simultaneamente os
efeitos da precessão Luni-solar e da precessão planetária. Devido à precessão
geral o ponto vernal sofre um movimento secular, e como este é origem de
contagem da abscissa esférica do sistema de coordenadas equatoriais, conclui-se
que a ascensão reta sofre variações no tempo. Como os meridianos celestes são
afetados por esta variação também a declinação sofre variações no tempo.
Representa-se na esfera celeste (figura 5.6) os pólos na época to e t,
denominando-os de Po e Pt , e seus correspondentes equadores celestes Qo Q’o e
Qt Q’t. Representa-se também os sistemas de coordenadas equatoriais
tridimensionais para as duas épocas. Como o nodo N é comum aos dois
equadores, o círculo máximo que contém Po Pt e A é polar do ponto N. Tem-se
que o arco de equador NA = 90o , analogamente NB = 90o. Denomina-se o arco
PoPt de . O ângulo formado pelo prolongamento deste lado e o meridiano que
contém Pt e t é chamado de z e o ângulo formado por este lado e o meridiano
que contém Po e o é denominado de .
CARLOS AURÉLIO NADAL
21
VARIAÇÃO DAS COORDENADAS CELESTES
Esses elementos são chamados de constantes precessionais e as fórmulas
que os fornecem são dadas por:
= (2306.2181+1.39656T-0.000139T)t+(0.30188-0.000345T)t+0.017998t
z =(2306.2181+1.39656T-0.000139T)t+(1.09468-0.000066T)t+0.018203t
=(2004.3109-0.85330T-0.000217T)t+(0.42665-0.000217T)t-0.041833t
onde, T é o numero de séculos julianos decorridos desde uma época
fundamental até J2000,0 e t é o número de séculos julianos decorridos entre uma
data e uma época fundamental.
Na figura tem-se ainda que, o N = 90o - e t N = 90o + z. Assim, a
partir do sistema de coordenadas médias numa época (com índice “o”) chega-se
ao sistema de coordenadas médias na época t pela aplicação das seguintes
rotações:
P = R3 (-z) R2 () R3 ()
que é conhecida como matriz precessão, a qual deve ser pré-multiplicada pelo
vetor posição da estrela no instante referente à época fundamental:
Xt = P Xo
Onde:
cos o cos o
Xo = cos o sen o
sen o
Zo
Po
Zt
Yt
Pt
Qt
z
Q’o
Qo
A
Q’t
B
Xt
CARLOS AURÉLIO NADAL
o
N
t
Xo
22
Yo
VARIAÇÃO DAS COORDENADAS CELESTES
Figura 5.6 – Precessão geral.
As equações simplificadas para o cálculo da precessão, com precisão da
ordem de 1", sobre as coordenadas equatoriais são fornecidas a seguir, tem
validade para qualquer data dentro de um intervalo de uns 20 anos, em relação
ao ano 2000 [Seidelmann, 1992]:.
d
d / dt = m + n sen
tan
onde m=3.07419 s/ano e n=20.0383 "/ano ou 1.33589s/ano. Tem-se que:
= o + d
= o + d
sendo o e o as coordenadas médias de catálogo para a época fundamental
J2000,0.
6. PARALAXE ESTELAR
A paralaxe pode ser definida como a mudança relativa da posição de um
objeto devido a mudança de posição do observador. Por motivos didáticos
divide-se a paralaxe em anual (devido ao movimento de translação da Terra em
torno do Sol) e diária (divido ao movimento de rotação da Terra).
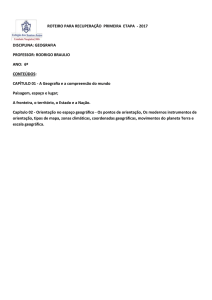
6.1 Paralaxe anual
Devido ao movimento de translação da Terra em torno do Sol cada estrela
parece descrever uma pequena elipse em torno de sua projeção sobre a esfera
celeste, considerando-se o Sol, como centro de projeção. Esta elipse é
denominada de elipse paralática e será tanto maior quanto menor for a latitude
celeste do astro, até degenerar num segmento no caso de uma estrela situada no
plano da elíptica (figura 6.1).
Define-se como paralaxe anual ao ângulo segundo o qual de uma estrela
subtende-se o raio da órbita da Terra, variável em função da distância astroTerra.
CARLOS AURÉLIO NADAL
23
VARIAÇÃO DAS COORDENADAS CELESTES
estrela
elipse paralática
R = raio da órbita da Terra
D = distância estrela-Terra
= paralaxe anual
D
eclíptica
R
Sol
Terra
Figura 6.1 Paralaxe anual de uma estrela
Nos séculos XVII e XVIII houveram muitas tentativas no sentido de se
medir a paralaxe anual de estrelas por Hooke, Roemer, Bradley e Herschell,
esbarravam, no entanto, em problemas de resolução e precisão dos instrumentos
disponíveis na astrometria.
Bradley utilizando a estrela Dra descobriu como veremos a seguir o
fenômeno denominado de aberração da luz. Somente em 1838 Bessel admitindo
que as estrelas de maior movimento próprio deveriam ser as mais próximas da
Terra, concentrou seu trabalho na estrela 61 Cygni, que se desloca com
movimento da ordem de 5”/ano, chegou a conclusão que sua paralaxe era de
0,31” (atualmente 0,32”). Struve neste mesmo ano fez outra hipótese, a de que
as estrelas mais brilhantes deveriam ser as mais próximas, trabalhou com a
estrela LYR (Vega), e por mero acaso, já que está estrela satisfaz tal hipótese
determinou um valor de 0,25” (atualmente 0,12”).
A paralaxe anual constitui-se da prova física do movimento de translação
da Terra em torno do Sol, por ser um valor pequeno mesmo para as estrelas mais
próximas é ainda na atualidade de difícil mensuração. O Catálogo estelar de
Paralaxe contém poucas estrelas do catálogo fundamental com observações
confiáveis estatisticamente. No quadro 1 a seguir mostra-se as estrelas mais
próximas e suas paralaxes.
CARLOS AURÉLIO NADAL
24
VARIAÇÃO DAS COORDENADAS CELESTES
Quadro 1. Estrelas mais próximas da Terra.
estrela
magnitude
Próxima de Centauro
Cen
Flecha de Barnard
Lalande 21185
CMa (Sirius)
=11h12min =57o S
Córdoba 243
Cet
Eri
61 Cygni
CMi (Procion)
11,0
0,3
9,6
7,4
-1.6
12,0
8,3
3,6
3,8
5,6
0,5
paralaxe
()
0,77
0,76
0,53
0,41
0,37
0,34
0,32
0,32
0,32
0,32
0,31
mov. próprio distância
(anos-luz)
(/ano)
3,85
4,2
3,68
4,3
10,29
6,1
4,78
7,9
1,32
8,7
2,69
9,5
8,75
10,2
1,92
10,2
0,97
10,2
5,25
10,2
1,24
10,4
O cálculo da paralaxe é simples e rigoroso tanto no que diz respeito a
paralaxe anual como a paralaxe diária [Seildemann, 1992]. O vetor posição do
corpo celeste rE num sistema geocêntrico para a paralaxe diária e num sistema
heliocêntrico ou baricentrico para a paralaxe anual, com respeito a origem E é
dado por:
rE = uB – EB
onde uB e EB são os vetores posição da nova origem e do corpo
respectivamente, com respeito a origem antiga e referidos ao mesmo sistema de
referência.
6.2 Paralaxe diária
Uma direção observada a partir de um ponto situado na superfície da
Terra a um astro modifica-se constantemente devido ao movimento de rotação
terrestre. Para se minimizar este efeito deve-se reduzir estas direções ao centro
da Terra, ou seja, deve-se transformar o sistema topocêntrico em sistema
geocêntrico.
Na figura 6.2 imagina-se um observador situado no ponto A na superfície
da Terra, este observará a estrela S no ponto S1 da esfera celeste. A distância
zenital topocêntrica da estrela será Z1. Se este observador se encontrasse no
centro da Terra “o”, veria esta mesma estrela em S2, com distância zenital
CARLOS AURÉLIO NADAL
25
VARIAÇÃO DAS COORDENADAS CELESTES
geocêntrica Z2. Denomina-se de paralaxe diária “p”
distâncias zenitais:
a diferença entre as
p = Z1 – Z2
Z
S2
Z1 S
S1
A
Z2
B
o
Figura 6.2 Paralaxe diária
A partir de o traça-se à reta OB paralela a AS1, verificando-se que o
ângulo AôB é igual a Z1, e SôB é igual a p.
Pode-se agora definir a paralaxe diária como sendo o ângulo segundo o
qual o raio terrestre passante pelo observador seria visto do astro.
Tomando-se o triângulo Aso, nele aplicando-se a lei dos senos tem-se:
Ao
oS
=
sen p
sen (180o – Z1)
sendo Ao o raio da Terra que será representado por R e OE a distância
geocêntrica do astro, representada por D, pode-se escrever:
R
sen p
= sen Z1
D
Quando o astro se encontra no horizonte tem-se que Z1 = 90o obtém-se
sen p
CARLOS AURÉLIO NADAL
R
=
26
VARIAÇÃO DAS COORDENADAS CELESTES
D
Sendo a paralaxe diária neste caso denominada de paralaxe horizontal.
O efeito da paralaxe diária nas coordenadas equatoriais é dado pelas
expressões [Hatschbach, 1975]:
= - p sen H cosec Z2 cos sec
= - p (cosec Z2 sen sec - tg cotg Z2 )
No caso das estrelas a paralaxe diária é negligenciada devida a suas
grandes distâncias geocêntricas, porém para o Sol e os planetas deve ser
considerada. Para o caso da Lua não poderia ser usada esta expressão pois a
mesma foi deduzida supondo-se a Terra esférica, deveria ser considerada a
forma elipsoidal da Terra devido a proximidade dos dois corpos celestes.
7. ABERRAÇÃO ESTELAR
As investigações do astrônomo Bradley em 1725 sobre a declinação da
estrela Dra não indicavam um movimento da estrela sobre a elipse paralática
procurada; assim, por exemplo, esperava valores iguais para a declinação nos
equinócios e elas resultaram diferentes de cerca de 40, esperava encontrar
discrepâncias máximas nos solstícios e encontrou praticamente os mesmos
valores.
Três anos de investigações, em 1728, possibilitou a Bradley uma
explicação para o fenômeno, que mais tarde foi denominado de Aberração
estelar. A variação da posição da estrela estaria ligada à relação entre a
velocidade da luz e a velocidade do observador. Esta descoberta também faria
parte da prova física do movimento de translação da Terra ao redor do Sol.
Para ser entendida a aberração estelar pode-se utilizar como exemplo um
móvel atingido por um projétil. Se o mesmo estivesse parado (figura 7.1.a) o
projétil perfurá-lo-ia nos pontos a e b alinhados com o local de disparo. Em
conseqüência do movimento do móvel (figura 7.1.b), considerando-se o tempo
que o projétil leva para atravessa-lo resultará numa perfuração no ponto c.
Quanto maior for a velocidade do móvel e menor a do projétil maior à distância
bc. Ainda no primeiro caso, quando se liga o ponto a ao ponto b e por
prolongamento, materializa-se o local de disparo (D), no segundo caso a posição
aparente de disparo (D’) forma com a real um ângulo que é denominado de
ângulo de aberração.
CARLOS AURÉLIO NADAL
27
VARIAÇÃO DAS COORDENADAS CELESTES
c
b
b
v
a
a
D
a) móvel em repouso
D
D’
b) móvel em movimento
Figura 7.1 Ângulo de aberração
Ao se observar uma estrela o fenômeno ocorre de forma análoga, sendo
necessária a consideração da velocidade da luz emanada e a velocidade de
tangencial de translação da Terra.
Denomina-se de aberração estelar a consideração somente do movimento
da Terra, pois os movimentos próprios das estrelas são muito reduzidos. No caso
de considerar-se a Terra imóvel e o astro se deslocando denomina-se de correção
para o tempo de deslocamento da luz, e no caso de planetas, cometas, satélites
naturais ou artificiais onde os corpos tem movimentos sensíveis em relação à
Terra denomina-se o fenômeno de aberração planetária.
Interessa ao cartógrafo principalmente a aberração estelar. Suponha-se na
figura 7.2 que o observador encontra-se em repouso, a estrela S seria vista em S1
e sua direção formaria com a direção do deslocamento um ângulo um ângulo
. Como a Terra encontra-se em movimento a luz emanada da estrela leva um
certo tempo para ir da objetiva à ocular da luneta [Hatschbach, 1975], o que faz
com que a estrela seja vista na posição S2. O ângulo é o ângulo de aberração.
Dos triângulos E’ E’1 E’2 pode-se escrever que:
S’1 S’2
S’ S’2
=
sen
sen ( 180o -)
sendo v a velocidade de deslocamento da Terra e c a velocidade da luz tem-se:
S’1 S’2 = v t
S’ S’2 = c t
CARLOS AURÉLIO NADAL
28
VARIAÇÃO DAS COORDENADAS CELESTES
S
S’
S2
S1
S’2
v
S’1
Figura 7.2 – Aberração estelar.
Tem-se então que:
vt
ct
=
sen
sen
ou,
v
sen = sen
c
como a aberração apresenta valores pequenos pode ser expressa na forma;
v
” =
c sen 1”
sen
a aberração será máxima quando = 90o, ou seja, a direção do raio luminoso for
perpendicular a direção de deslocamento do observador, neste caso aparece a
denominada constante de aberração k
max ” = k
ou,
CARLOS AURÉLIO NADAL
29
VARIAÇÃO DAS COORDENADAS CELESTES
” = k sen .
Dependendo dos movimentos da Terra pode-se dividir a aberração em
secular, anual e diária. A aberração secular devida ao movimento do sistema
solar em torno do centro de nossa galáxia é praticamente constante para todas as
estrelas, sendo ignorada nos cálculos.
7.1 Aberração anual
Ao se fazer a velocidade do observador igual a velocidade de translação
da Terra ao redor do Sol, resultará para v o valor aproximado v = 30 km/s
adotando-se para luz a velocidade aproximada de c= 300000 km/s, resultará
para a constante de aberração o valor:
k = 20,626”
o valor adotado pela IAU – 1976, é:
k = 20,49552
7.2 Aberração diária
A aberração diária é causada pelo movimento de rotação da terra em torno
de seu eixo de rotação. A velocidade tangencial de rotação depende da latitude
do observador, sendo a velocidade máxima obtida para um observador situado
no equador, resulta em aproximadamente ve = 0,465 Km/s.
Obtém-se para a constante de aberração diária o valor de: [Hatschbach,
1975]:
Kd = 0,213s cos
A correção da aberração se faz com rigor interpondo-se nela o efeito relativístico
especial, onde a velocidade da luz é constante em movimento num referencial
estacionário, utiliza-se a formula de Lorentz para adição de velocidades.
[Seildemann, 1992].
8. MOVIMENTO PRÓPRIO DAS ESTRELAS
O movimento próprio intrínseco das estrelas é de difícil determinação,
pois exige que todas as correções discutidas anteriormente sejam aplicadas a
uma estrela neste processo. Assim se a posição catalogada de uma estrela numa
determinada época e comparada com uma observada e corrigida em outra, a
diferença de posição pelos dois processos é admitida como sendo oriunda de
CARLOS AURÉLIO NADAL
30
VARIAÇÃO DAS COORDENADAS CELESTES
movimentos da estrela. Este movimento pode ser atribuído a deslocamentos
desta estrela em relação a outras do universo, e ao movimento do sistema solar
em relação às estrelas.
O movimento próprio é geralmente decomposto em duas componentes
uma radial, isto é, na direção observador estrela e outra transversal que é normal
a aquela direção. A componente radial pode ser determinada pelo efeito
Doppler, enquanto que a tangencial é mais usada na astrometria para a posição
da estrela num sistema de coordenadas. A componente tangencial é decomposta
em duas componentes uma em ascensão reta e outra em declinação. A unidade
de medida da velocidade radial em ascensão reta no FK5 é s/sec (segundos de
tempo por século) e da velocidade radial em declinação /sec ( segundos de arco
por século). A velocidade radial com que uma estrela se desloca é também
tabelada no FK5, denominada de velocidade radial.
9. DEFLEXÃO GRAVITACIONAL DA LUZ
Este fato foi previsto por Einstein e confirmado pela primeira vez
fotograficamente no eclipse de 1919 pelas expedições de Greenwich e
Cambridge. Foi medida muitas vezes e com alta precisão na atualidade com
radio interferometria que podem observar fontes muito próximas do Sol. A
deflexão aumenta a medida que o raio visual proveniente da estrela se aproxime
do Sol. O algoritmo para o cálculo da deflexão gravitacional da luz é fornecido
pelo Astronomical Almanac (1984). No caso de estrelas somente o efeito
gravitacional causado pelo Sol é considerado, desprezando-se o mesmo efeito
causado pelos demais planetas do sistema solar.
Detalhes sobre a dedução das expressões utilizadas neste trabalho podem
ser obtidos em Seidelmann (1992).
10. MOVIMENTOS DOS PÓLOS
A rotação da Terra é representada pelo movimento diurno em torno de um
eixo de referência o qual apresenta movimentos com respeito a um sistema
inercial que é representado pelas teorias da precessão e nutação. Em outras
palavras o eixo de rotação além de apresentar um movimento em relação às
estrelas já estudado anteriormente, apresenta outro em relação ao próprio corpo
da Terra. O eixo de rotação não coincide com o eixo de figura da Terra (eixo
principal de inércia), mas move-se lentamente com respeito a um sistema
terrestre de referência, movimento este conhecido como movimento dos pólos.
A amplitude máxima desse movimento é da ordem de 0,3”, o que
corresponde a um deslocamento sobre a superfície da Terra da ordem de 9m,
seus principais períodos são: 365 dias e 428 dias. O movimento é afetado por
forças geofísicas não previsíveis e são determinadas por observações estelares,
radio fontes, VLBI e laser.
CARLOS AURÉLIO NADAL
31
VARIAÇÃO DAS COORDENADAS CELESTES
Assim o pólo e o meridiano origem (Greenwich) são definidos num
sistema de coordenadas terrestre realizado pela adoção de um conjunto de
coordenadas fornecidas por instrumentos que são utilizados para determinar o
movimento dos pólos e o tempo universal (TU) a partir de observações
astronômicas. O pólo neste sistema é denominado de CIO (origem internacional
convencional).
O IERS (Serviço Internacional de Rotação da Terra), publica
mensalmente as coordenadas x e y do denominado pólo das efemérides celestes
num sistema de coordenadas cartesianas ortogonais com origem no CIO e com
eixos x ao longo da tangente ao mediano de Greenwich e o eixo y ao longo da
tangente ao meridiano 270o (90o W) e são fornecidas na unidade de segundos de
arco.
O movimento dos pólos causa variações na distância zenital, no azimute,
na latitude e na longitude terrestres determinadas por observações astronômicas.
As variações da latitude e da longitude causadas pelo movimento dos
pólos é fornecida pelas expressões:
= x cos m -y sen m
e,
= (x sen m + y cos m) tg m
e o índice m representando valores médios.
11. CALCULO DAS COORDENADAS APARENTES DE UMA ESTRELA
Os procedimentos para calcular a posição aparente de uma estrela do
Catalogo Fundamental é explicitada por Lederle et al (1984), sugerido e adotado
pela IAU a partir de 1984. A partir do artigo descrito, foram efetivados
programas que permite a partir do conhecimento das denominadas coordenadas
equatoriais médias de uma estrela, isto é, a ascensão reta e a declinação
determinadas por observações astrométricas para o dia 01 de janeiro de 2000 as
12h TU (J2000,0), que seja possível por cálculo a obtenção das coordenadas
equatoriais corrigidas dos efeitos discutidos neste trabalho e alguns de menor
efeito para o instante da observação denominadas de coordenadas equatoriais
aparentes de uma estrela.
As principais recomendações da União Astronômica Internacional a partir
de 1984, são as seguintes [Lederle, et al., 1984]:
a) O FK5 representa o sistema fundamental realizado em uso a partir desta data;
b) O ponto vernal, origem da contagem das ascensões retas será definido em
função de correções a serem introduzidas nas expressões para o cálculo da hora
sideral à 0h TU1;
CARLOS AURÉLIO NADAL
32
VARIAÇÃO DAS COORDENADAS CELESTES
c) O Sistema de constantes astronômicas a ser adotado será o IAU –1976, em
particular os novos valores para as constantes de precessão, aberração e
obliqüidade da eclíptica;
d) adotar-se-á a teoria da nutação de IAU 1980;
e) a aberração estelar deverá ser calculada a partir da velocidade total da Terra,
referida ao baricentro do sistema solar;
f) as reduções às posições aparentes de uma estrela deverão ser calculadas de
forma rigorosa (incluindo efeitos relativísticos) e direta sem passagens
intermediárias de cálculo.
Como exemplo de redução estelar, isto é, a obtenção de coordenadas
aparentes de estrelas, adotar-se-á neste trabalho o explicitado no The
Astronomical Almanac [1996], como formulários e métodos páginas B39 e B40.
1) Adota-se o tempo dinâmico baricêntrico igual ao tempo dinâmico terrestre
[Nadal, 1998];
2) Obtém-se as posições baricêntricas da Terra EB em unidades astronômicas e a
velocidade baricêntrica da Terra VB em unidades astronômicas por dia, para o
instante t, correspondente ao instante TDT.
A direção baricêntrica de uma estrela é dada na época J2000, referida ao
equador padrão e o ponto vernal J2000,0 pela expressão das coordenadas do
vetor:
cos o cos o
q = sen o cos o
sen o
onde o e o são a ascensão reta e a declinação para o equador e o ponto vernal
correspondentes a J2000,0 (catalogadas no FK5).
O vetor m denominado de movimento-espaço das estrelas é espresso em
radianos por século pela expressão:
- sen o cos o - cos o sen o + v cos o cos o
m = - cos o cos o - sen o sen o + v sen o cos o
- cos o + v sen o
onde, a velocidade radial (v) é expressa em unidades astronômicas por ano
(1km/s = 21,095 ua/sec), medida positivamente a partir da Terra. As
componentes do movimento próprio da estrela em ascensão reta e em
declinação são expressas em radianos por século e a paralaxe expressa em
radianos.
O vetor posição geocêntrico da estrela para uma determinada época é
fornecido pela expressão matricial:
P = q + Tm - VB
CARLOS AURÉLIO NADAL
33
VARIAÇÃO DAS COORDENADAS CELESTES
É necessário o cálculo da posição heliocêntrica da Terra dada pela
expressão vetorial:
E = EB - SB
onde SB é o vetor posição baricêntrica do Sol no instante t.
3) A posição geocêntrica (p) da estrela, corrigida da deflexão da luz num sistema
natural é dada por:
p1 = p + (2/c2 E)(e – (p.e)p)/(1 + p.e)
onde p é um vetor unitário obtido por:
p = P/ P
já o vetor unitário e é dado por:
e = E/ E
na expressão de p1 o ponto indica produto escalar, /c2 = 9,87 x 10-9 unidades
astronômicas.
4) Para o cálculo da direção própria p2 , num sistema inercial geocêntrico, que se
move com a velocidade instantânea da Terra (V), tem-se:
p2 = {-1 p1 + [1 + (p1.V)/(1+ -1)]V}/ (1 + p1.V)
onde
V = VB/c
ou,
V= 0,0057755VB
e,
= (1 – V2) –1/2
a velocidade V é expressa em unidades da velocidade da luz.
5) Deve-se na seqüência aplicar o efeito da precessão e da nutação na forma:
p3 = P.N p2
6) Finalmente deve-se converter coordenadas tridimensionais em coordenadas
esféricas pelas expressões:
CARLOS AURÉLIO NADAL
34
VARIAÇÃO DAS COORDENADAS CELESTES
px
p 3 = py
pz
e,
= arctg (px / py)
= arcsen (pz)
o quadrante de é determinado pelos sinais de px e py .
REFERÊNCIAS BIBLIOGRÁFICAS
[1] BAKOULINE, P., KONONOVITCH E., MOROZ Y. Astromomie
Generale,Editions Mir. Moscou., 1981.
[2] BOCZKO, R. Conceitos de Astronomia. Editora E. Blücher Ltda. São Paulo,
1984.
[3] CHAUVENET, W. Manual of Spherical and Practical Astronomy.
Philaelphia: J.B. Lippincott & Co. London: Trübner & Co. vol. I., 1876.
CLAUZET, L.B.F. Contribuição ao sistema fundamental de referência
catálogos Astrolábio de Valhinhos. Tese de Doutorado, IAG, USP. 1982.
125p.
[4] GEMAEL C. Introdução à Astronomia Esférica II. Cadernos Técnicos .
DAST, UFPr, 1981.
[5] NADAL, C.A. Determinação da Longitude do Lugar pelo Método de
Mayer. Tese de Concurso para Professor Titular. UFPR, 1992.
[6] NADAL, C. A. Determinação do azimute de uma direção pelo Método das
distâncias zenitais absolutas com observações ao Sol. UFPR, 1999. 39p.
CARLOS AURÉLIO NADAL
35
VARIAÇÃO DAS COORDENADAS CELESTES
CARLOS AURÉLIO NADAL
36