Física Geral I
1º semestre - 2004/05
2 ◦ T ESTE DE AVALIAÇÃO
2668 - E NSINO DE F ÍSICA E Q UÍMICA
1487 - O PTOMETRIA E O PTOTECNIA - F ÍSICA A PLICADA
9 de Dezembro 2004
• Duração: 2 horas + 30 min tolerância
• Nas primeiras seis perguntas de escolha múltipla indique apenas uma das opções
C ONSTANTES F ÍSICAS E OUTROS DADOS
Constante
velocidade da luz no vácuo
unidade de massa atómica
constante de Avogadro
massa do electrão em repouso
massa do protão em repouso
massa do neutrão em repouso
aceleração da gravidade à superfície da Terra
massa da Terra
raio médio da Terra
Símbolo
c
u
NA
me
mp
mn
g
Valor
3, 00 × 108 m/s
1, 66 × 10−27 kg
6, 02 × 1023
9, 11 × 10−31 kg
1, 67 × 10−27 kg
1, 67 × 10−27 kg
9, 81 m/s2
5, 98 × 1024 kg
6, 37 × 106 m
Teste de Avaliação - 2
9.Dezembro.2004
F ÍSICA G ERAL I
1
UBI
E SCOLHA M ÚLTIPLA
1. Indique qual das afirmações está incorrecta
A variação da quantidade de movimento total de um sistema de partículas,
d P~
, representa
dt
(a) a variação da força resultante que actua no sistema.
(b) o somatório de todas as forças internas e externas que actuam no sistema.
(c) o produto da massa total do sistema pela aceleração do Centro de Massa.
(d) a variação da quantidade de movimento do centro de massa.
(1,0 valor)
2. O sistema de amortecimento ao impacto de um automóvel de 1 500 kg de massa é testado
fazendo-o colidir frontalmente com uma parede, quando este se desloca a uma velocidade
constante v = 108 km/h. O carro ficou em repouso no fim colisão, que durou 2, 00 s.
A intensidade da força média, Fmed , que a parede exerceu no carro durante colisão, foi
(a) Fmed = 15, 0 × 103 N.
v
(b) Fmed = 22, 5 × 103 N.
(c) Fmed = 45, 0 × 103 N.
(d) Fmed = 81, 0 × 103 N.
(1,0 valor)
3. Numa colisão unidimensional elástica entre duas partículas verifica-se que a velocidade
final de cada uma das partículas é simétrica da velocidade inicial,
(a) apenas em referenciais inerciais.
(b) num referencial localizado em qualquer das partícula.
(c) no referencial do centro de massa do sistema.
(d) independentemente do referencial utilizado.
(1,0 valor)
4. Considere sete aves migratórias com a mesma massa, m, que se deslocam para Sul com a
mesma velocidade, v. Num determinado instante, uma das aves perde altitude acabando
por cair no solo. Após esta queda, a velocidade do centro de massa do sistema
(a) continua direccionada para Sul com a mesma velocidade v.
(b) continua direccionada para Sul com uma velocidade de
(c) continua direccionada para Sul com uma velocidade de
1
7
6
7
v.
v.
(d) anula-se e o centro de massa fica localizado no local de impacto da ave.
(1,0 valor)
Teste de Avaliação - 2
9.Dezembro.2004
F ÍSICA G ERAL I
2
UBI
Considere o planeta Terra como uma esfera.
ω
5. A velocidade angular, ω, do planeta Terra, devido à rotação sobre
si próprio, tem uma intensidade
(a) ω = 72, 7 × 10−6 rad/s.
(b) ω = 11, 6 × 10−6 rad/s.
(c) ω = 41, 7 × 10−3 rad/s.
(d) ω = 1, 47 × 109 rad/s.
(1,0 valor)
Considere uma partícula de massa m, que está ligada ao seu eixo de rotação através de uma
haste de massa desprezável e comprimento R. Este sistema é acelerado uniformemente a
partir do repouso, no instante t = 0, com uma aceleração angular α.
6. Num determinado instante t > 0, a intensidade do vector aceleração (linear) é
√
(a) α R 1 + α2 t4 .
α
R
(b) α R + α4 t4 R.
√
(c) α R + α2 t2 R.
(d) α2 t2 R.
(1,0 valor)
PARTE P RÁTICA
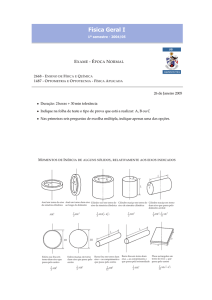
7. Duas embarcações A e B navegam em rota de colisão, com
velocidades vA = 10, 0 m/s e vB = 5, 0 m/s, respectivamente. As
suas rotas iniciais fazem um ângulo θ = 30◦ entre si (ver Figura).
A massa da embarcação A é mA = 500 kg e da embarcação B é
mB = 5 000 kg.
Α
y
x
Imediatamente após a colisão, a embarcação A toma a direcção
inicial da embarcação B e a sua velocidade é 5 vezes o seu valor
inicial.
(a) Usando o referencial da Figura, determine o vector velocidade da embarcação B, imediatamente após a colisão.
θ
Α
Β
(b) Indique a direcção e a intensidade da velocidade da embarcação B nesse instante.
(3,5 valores)
Teste de Avaliação - 2
9.Dezembro.2004 - SOLUÇÕES
F ÍSICA G ERAL I
2m
d
UBI
3m
8. Considere um corpo rígido composto por quatro partículas localizadas nos vértices de um rectângulo de largura d e comprimento 2d. As hastes do rectângulo têm massa desprezável e as
massas das partículas são, m, 2m, 3m e 4m, respectivamente (ver
Figura).
2d
(a) Determine o centro de massa do sistema.
(b) Determine o momento de inércia do sistema, segundo um
eixo perpendicular à página e que passa pela massa m
(ponto O).
m
Nota: Apresente as suas respostas em função de m e d.
4m
O
(3,5 valores)
9. Uma ventoinha roda com uma velocidade angular ωo = 50π rad/s. Subitamente a ventoinha é desligada e perde velocidade angular uniformemente, até atingir o repouso passados
60,0 s.
(a) Determine a aceleração angular durante a paragem.
(b) Qual o número de rotações que a ventoinha completou até parar?
(c) Determine a aceleração angular necessária para que a ventoinha
volte a rodar com mesma velocidade ωo ao fim de 5, 0 s.
(3,5 valores)
10. Considere um bloco de massa m, que está sobre uma prancha de comprimento d e massa
2
3
2 m. Este bloco encontra-se a uma distância 5 d de uma das extremidades da prancha. A
prancha apenas está apoiada em dois pés que se encontram localizados a uma distância 31 d,
de cada uma das extremidades (ver Figura). Não existe qualquer força de atrito entre os pés
e a prancha ou entre o bloco e a prancha.
2d/5
d/3
m
d/3
3m/2
d/3
Considere os valores d = 1 m e m = 10 kg, como valores exactos.
(a) Determine a força que cada um dos pés exerce sobre a prancha.
(b) Determine a distância mínima a que o bloco se pode encontrar da extremidade da
prancha, sem que esta saia do equilíbrio.
(3,5 valores)
0
Teste de Avaliação - 2
9.Dezembro.2004 - SOLUÇÕES
F ÍSICA G ERAL I
UBI
S OLUÇÃO
E SCOLHA M ÚLTIPLA
1. A variação da quantidade de movimento linear total de um sistema, pode ser representada
nas seguintes formas,
d P~
dt
P~
P
P~
Fint + F~ext
=
Fext
d P
=
{( i mi ) ~vCM }
dt
P
d
= ( i mi ) ~vCM
dt
P
= ( i mi ) ~aCM ,
=
onde os somatórios são extendidos a todas as partículas i do sistema.
A afirmação incorrecta é a (a).
2. Teorema impulso-momento linear (uma dimensão),
Fmed ∆ t = ∆ P .
Fmed
Pi − Pf
∆t
vi − vf
= m
∆t
=
=
=
1 500 ×
108
3,60
−0
2, 00
22, 5 × 10 N
3
Opção (b).
3. Ver paginas 144-146 do livro de texto base. Opção (c).
4. Inicialmente a velocidade do centro de massa das aves (relativamente à Terra) é,
vCM
=
=
P
mv
P i i
mi
7 × mv
7×m
= v
em que m e v representam a massa e a velocidade (comum) de cada ave.
Após a queda de uma das aves, temos seis aves que continuam com a mesma velocidade v
e uma ave com velocidade nula. O cálculo da velocidade do centro de massa nesta situação
é,
vCM
=
=
Opção (c).
6 × mv
7×m
6
v
7
1
Teste de Avaliação - 2
9.Dezembro.2004 - SOLUÇÕES
F ÍSICA G ERAL I
UBI
5. A Terra demora 24 horas a perfazer uma rotação completa em torno do seu eixo, i.e. a Terra
completa um ciclo em
24 horas ×
60 min
60 s
×
= 86 400 s
1 hora
1 min
.
Um ciclo corresponde a um ângulo de 2 π rad, logo a velocidade angular da Terra é
ω=
∆φ
2π
=
= 7, 27 × 10−6 rad/s .
∆t
86 400
Opção (a).
6. O vector aceleração da partícula pode ser decomposto segundo as direcções ortogonais radial e tangencial à trajectória circular, conforme ilustrado na figura indicado na expressão
seguinte,
α
~a = aT ûT − aR ûR
2
= α R ûT − ω R ûR ,
a
ûT
ûR
onde ûT e ûR representam os versores das direcções tangencial e
radial, respectivamente.
Uma vez que o movimento é uniformente acelerado a partir do repouso (ωo = 0), a velocidade angular, ω varia uniformente com o tempo da seguinte forma,
ω = αt ,
logo, o vector aceleração pode ser expresso na seguinte forma,
~a = α R ûT − (α t)2 R ûR .
A intensidade do vector aceleração é calculada a partir das suas componentes ortogonais,
sendo,
p
(aT )2 + (aR )2
p
=
(α R)2 + {(α t)2 R}2
p
= α R 1 + α 2 t4
a =
Opção (a).
2
Teste de Avaliação - 2
9.Dezembro.2004 - SOLUÇÕES
F ÍSICA G ERAL I
UBI
U MA R ESOLUÇÃO P OSSÍVEL
PARTE P RÁTICA
7. Considerando o nosso sistema como sendo formado pela embarcação A e a embarcação B, e
que a acção das forças externas é desprezável durante a colisão dos embarcações, podemos
afirmar que a quantidade de movimento linear do sistema conserva-se, i.e.,
d P~
= 0 =⇒ P~ = constante .
dt
Deste modo, a quantidade de movimento linear do sistema antes
da colisão (i) será a mesma imediatamente após a colisão (f ),
X
v
Αf
Fext =
Α
y
v =?
Βf
Β
x
P~i = P~f ,
θ
i.e., em cada um dois eixos ortogonais verifica-se,
Pxi
= Pxf
Pyi
= Pyf
v
Αi
Α
Β
v
Βi
De acordo com o referencial da figura, os vectores velocidade dos embarcações são,
~vAi
= vAi (sin θ î + cos θ ĵ)
~vBi
= vBi ĵ
~vAf
= vAf ĵ
~vBf
= vBfx î + vBfy ĵ
onde vBfx e vBfy representam cada uma das componentes ortogonais do vector velocidade
final (após a colisão) da embarcação B.
Assim, de acordo com a lei da conservação da quantidade de movimento, temos, em cada
um dos eixos ortogonais, as duas equações seguintes,
mA vAi sin θ
mA vAi cos θ + mB vBi
= mB vBfx
= mA vAf + mB vBfy .
Resolvendo este sistema em ordem às duas incógnitas (vBfx e vBfy ), obtemos,
vBfx
=
vBfy
=
mA
vAi sin θ
mB
mA
(vAi cos θ − vAf ) + vBi .
mB
Os dados do exercício são:
vAi
=
10 m/s
vBi
=
5, 0 m/s
vAf
=
50 m/s
mA
=
500 kg
mB
=
5 000 kg
θ
=
30◦
3
Teste de Avaliação - 2
9.Dezembro.2004 - SOLUÇÕES
F ÍSICA G ERAL I
4
UBI
e as componentes ortogonais do vector velocidade ~vBf são:
vBfx
=
vBf
y
=
1
500
10 sin (30◦ ) = = 0, 50 m/s
5 000
2
√
500
3
◦
(10 cos (30 ) − 50) + 5, 0 =
= 0, 87 m/s .
5 000
2
(a) O vector velocidade da embarcação B expresso segundo o
referencial da figura, é
y
v
Αf θ
~vBf = (0, 50 î + 0, 87 ĵ) m/s .
x
(b) A intensidade da velocidade da embarcação B é,
vBf =
p
θ
0, 502 + 0, 872 = 1, 0 m/s ,
e a sua direcção é ,
v
Βf
60º
v
Αi
v
Βi
vBfy
0, 87
= arctan
arctan
= 60◦ .
vBfx
0, 50
i.e. 60◦ medidos a partir do eixo x e no sentido directo.
8.
(a) O vector centro de massa de um sistema de partículas é dado pela expressão,
P
mi ~ri
~rCM = Pi
.
i mi
Para determinar os vectores posição, relativamente ao ponto O, das quatro partículas
do sistema, usou-se o referencial xy da figura.
Designando as partículas de acordo com a figura, temos:
~r1
~r2
~r3
~r4
=
=
=
=
0
2 d ĵ
d î + 2 d ĵ
d î
m1
m2
m3
m4
2
d
= m
= 2m
= 3m
= 4m .
Nessa conformidade, o centro de massa do sistema vem dado
por,
xCM
=
yCM
=
3md + 4md
= 0, 7 d
10m
4md + 6md
=d .
10m
2d
rCM
y
1
O
x
i.e., o vector centro de massa vem dado por,
~rCM = d (0, 7 î + ĵ) .
(b) O momento de inércia, Io , de um sistema de partículas, relativamente ao eixo perpendicular à página que passa p+elo ponto O, pode ser determinado através da expressão,
Io =
3
X
i
mi ri2 ,
4
Teste de Avaliação - 2
F ÍSICA G ERAL I
9.Dezembro.2004 - SOLUÇÕES
UBI
onde ri representa a distância mais curta da partícula i, de massa mi , ao eixo de rotação.
Neste caso a distâncias ao eixo de rotação de cada uma das partículas é dado pelas
intensidades dos vectores posição calculados na alínea anterior,
r1
r2
r3
r4
= 0
= √
2d
=
d2 + 4 d2
= d .
=
√
5d
resultando num momento de inércia dado por,
Io
√
= 2 m (2 d)2 + 3 m ( 5 d)2 + 4 m d2
= 8 m d2 + 15 m d3 + 4 m d2
= 27 m d2 .
9.
(a) Uma vez que a ventoinha perde velocidade uniformemente, a sua aceleração angular é constante. A equação da velocidade angular para o movimento uniformemente
acelerado é dada por,
ω(t)
= ωo + α t .
A sua velocidade em t = 0 é ωo = 50 π rad/s e dado que no instante t = 60, 0 s,
a sua velocidade é nula, a equação da velocidade angular permite-nos determinar a
aceleração angular da seguinte forma:
ω(60, 0) = 0
50 × π + α × 60, 0 = 0 .
Resolvendo em ordem a α, obtemos
α
50
= − 60,0
π
5
= −6 π
2
= −2, 62 rad/s .
A aceleração angular é negativa confirmando o facto de a ventoinha perder velocidade
durante os 60, 0 s.
(b) O número de rotações que a ventoinha efectuou durante a paragem pode ser calculado
através da equação da posição angular para o movimento uniformemente acelerado,
φ(t)
= φo + ωo t + 12 α t2 .
Tomando a posição angular, no instante t = 0 (quando a ventoinha é desligada), como
sendo φo = 0, a posição angular no instante t0 = 60, 0 s é dada por,
φ(t0 )
φ(60, 0)
=
=
=
=
ωo t0 + 21 α t02
50 π × 60, 0 − 12 × 65 π × (60, 0)2
(50 − 12 × 56 × 60, 0) × 60, 0 π
1 500 π rad .
Uma rotação completa corresponde a um ângulo de 2π rad, logo o número de rotações,
n, realizadas pela ventoinha durante a paragem foi,
n
= 1 500π rad ×
= 750 rot .
1
2π
rot/rad
5
Teste de Avaliação - 2
F ÍSICA G ERAL I
9.Dezembro.2004 - SOLUÇÕES
UBI
(c) A aceleração angular constante, necessária para que a ventoinha volte a rodar com
uma velocidade de 50 π rads/s, pode ser determinada usando a equação da velocidade
angular para movimento uniformente acelerado,
ω(t)
= ωo + α t ,
onde, neste caso, considera-se que a ventoinha está em repouso no instante t = 0, i.e.,
ωo = 0. No instante t00 = 5, 0 s a ventoinha deverá ter uma velocidade angular de
50 π rad/s. Substituindo este valores na equação da velocidade angular obtemos,
ω(t00 ) = 50 π
α t00 = 50 π
α × 5, 0 = 50 π .
Resolvendo em ordem a α, obtemos
α
50
= 5,0
π
= 10 π
2
= 31 rad/s .
A aceleração neste caso é positiva indicando que a ventoinha ganha velocidade no
sentido do deslocamento angular.
10. Consideremos que o sistema em análise é unicamente constituído pela prancha. Considerando como hipótese que o sistema está em equilíbrio, deve-se verifica a segunda lei de
Newton para a translação e a rotação, expressa na seguinte forma:
P~
F
P
~τ
= 0
P
=
~r × F~
=
0 ,
i.e., tanto a aceleração do centro de massa como a aceleração angular da prancha são nulas.
(a) Tomando como referência o ponto O, localizado na extremidade esquerda da prancha
(ver figura), as quatro forças que actuam na prancha e os seus pontos de aplicação, são
respectivamente,
• o peso da prancha ( 32 m ~g ) que actua no seu centro de massa a uma distância
ponto O;
1
2
d do
• a força que o bloco massa m exerce sobre a prancha que vale m ~g e que actua a uma
distância 52 d do ponto O;
~ 1 , que o apoio (pé) esquerdo exerce sobre a prancha e que actua vertical• a força, N
mente (valor desconhecido) a uma distância 13 d do ponto O;
~ 2 , que o apoio (pé) direito exerce sobre a prancha e que actua vertical• a força, N
mente (valor desconhecido) a uma distância 23 d do ponto O.
Estas forças estão representadas no diagrama de corpo livre na figura seguinte.
d/2
2d/5
N1
N2
O
mg
y
3/2 mg
d/3
d/3
x
6
Teste de Avaliação - 2
F ÍSICA G ERAL I
9.Dezembro.2004 - SOLUÇÕES
UBI
Considerando o referencial da figura, a condição dada pela segunda lei de Newton
para a translação, corresponde à equação de equilíbrio das forças segundo a direcção
y, conforme indicado na expressão seguinte,
3
2
N1 + N2 − m g −
mg
=
0 .
Uma vez que consideramos que o corpo está em equilíbrio, a condição de equilíbrio
dada pela segunda lei de Newton para a rotação deve-se verifica relativamente a qualquer ponto. Neste caso vamos calcular os momentos das forças externas relativamente
ao ponto O. O somatório do momento das forças externas, relativamente ao ponto O,
é dado por,
P
τoz
= N1
1
3
d + N2
2
3
d − mg
2
5
d−
3
2
mg
1
2
d
=
0 .
O vector momento da força, de qualquer uma das forças aplicadas na prancha, tem a
direcção z dado que todas estas forças estão localizadas no plano xOy. O seu cálculo
está simplificado pois a linha de acção das forças é sempre perpendicular ao vector
posição do seu ponto de aplicação na prancha.
Desta forma, obtemos o seguinte sistema de duas equações a duas incógnitas,
N1 + N2
N1 13 d + N2
2
3
5
2 mg
23
20 m g d
=
=
d
,
que tem a seguinte solução,
N1
N2
=
=
31
20
19
20
m g = 152 N
m g = 93, 2 N ,
usando g = 9, 81 m/s2 .
Ambas as forças dos apoios sobre a prancha são positivas, confirmando a hipótese
inicial de que a prancha se encontra em equilíbrio.
(b) Neste caso vamos considerar que o bloco de massa m se encontra numa posição arbitrária x, relativamente ao ponto O, e voltamos a impor, através das equações da dinâmica,
as condições de equilíbrio na prancha, reescritas em baixo,
P
F
P y
τoz
= 0
= 0 .
De acordo com a figura temos,
N1 + N2 − m g − 32 m g
N1 13 d + N2 32 d − m g x −
3
2
mg
1
2
= 0
= 0 .
d
x
2d/5
N1
N2
O
y
3/2 mg
d/3
d/3
mg
x
7
Teste de Avaliação - 2
F ÍSICA G ERAL I
9.Dezembro.2004 - SOLUÇÕES
UBI
Como podemos verificar, apenas a segunda equação difere das equações de equilíbrio
da alínea anterior, com a alteração do braço do momento da força, exercido pelo bloco
na prancha, de 25 d para a variável desconhecida x (intensidade do vector posição do
ponto de aplicação da força exercida pelo bloco na prancha).
A condição de equilíbrio para uma posição arbitrária, x, do bloco, depende dos valores
das forças dos pés sobre a prancha. Dado que a prancha está apenas apoiada sobre os
dois pés, estes conseguem apenas manter o equilíbrio caso as forças que exercem sobre
a prancha sejam positivas. Um valor negativo em qualquer uma destas duas forças
implica que um dos pés teria de suportar a prancha verticalmente para baixo.
Nessa conformidade, o sistema de equações deve ser resolvido em ordem às duas forças N1 e N2 , obtendo-as como função da posição x do bloco, conforme exposto,
N1
=
N2
=
x
( 11
4 − 3 d)m g
x
1
4 (12 d − 1) m g .
A condição de equilíbrio é então,
N1 > 0
N2 > 0
i.e.,
x
−3
d
12 x − 1
d
x <
x >
11
12
1
12
d
d .
Usando d = 1 m,
x <
x >
11
12
1
12
11
4
> 0
> 0 .
d/12
d/12
zona de equilíbrio
m
m ,
i.e., a distância mínima a que o bloco se pode encontrar da extremidade da prancha,
1
sem que esta saia do equilíbrio é de 12
m.
NOTA: A resolução deste exercício pode ser simplificada calculando o momento das
forças resultante relativamente ao CM da prancha. Experimente como exercício.
8