AULA 3 – CINEMÁTICA
MOVIMENTOS NO PLANO
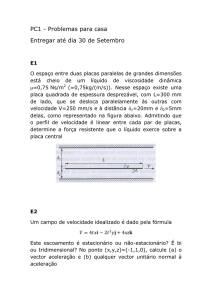
- componentes normais e tangenciais do vector aceleração
se v é constante então a t = 0
se a trajectória for rectilínea ( R = ∞ ) então a n = 0
- se o ângulo formado entre os vectores v e a for :
a
< 90º então t e v têm o mesmo sentido (movimento acelerado)
> 90º então a t e v têm sentidos contrários (movimento retardado)
= 90º então a t = 0 (movimento uniforme)
MOVIMENTOS CIRCULARES
- designam-se por movimentos circulares aqueles em que a trajectória é
circular, ou seja, o raio R é constante.
VELOCIDADE ANGULAR
∆θ ˆ
ω=
k ( rad/s )
∆t
DABP@2006
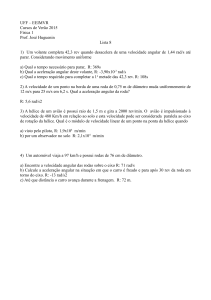
MOVIMENTO CIRCULAR UNIFORME (m.c.u.)
- neste tipo de movimento o módulo do vector velocidade é constante,
mas a sua direcção varia constantemente.
v = constante
v ≠ constante
- no m.c.u., o vector aceleração é radial, centrípeto (perpendicular ao
vector velocidade em cada ponto) e de módulo constante.
PERÍODO ( T )
- é o menor intervalo de tempo ao fim do qual as características de
posição, vector velocidade e vector aceleração se repetem.
2π ⋅ r
T=
(s )
v
ou
2π
T=
(s)
ω
FREQUÊNCIA ( f )
- a frequência de um m.c.u. é o número de voltas por unidade de tempo
que a partícula descreve.
1
f=
(Hz)
T
ou
ω
f=
( Hz )
2π
DABP@2006
MOVIMENTO CIRCULAR UNIFORMEMENTE VARIADO (m.c.u.v.)
θ = θ 0 + ω0 ⋅ t +
1
⋅ α ⋅ t 2 ( rad )
2
ω = ω0 + α ⋅ t ( rad/s )
α = constante ( rad/s 2 )
Relação entre a velocidade linear e a velocidade angular:
v=ω ⋅ r
Relação entre a aceleração tangencial e a aceleração angular:
at = α ⋅ r
PROJECTEIS
o movimento efectuado por um projéctil descreve uma trajectória
plana em forma de parábola. Trata-se da soma de dois movimentos, um
segundo a horizontal e outro segundo a vertical.
DABP@2006
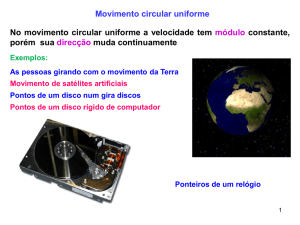
um projéctil, se desprezarmos a resistência do ar, após ter sido lançado
só está sujeito à acção da gravidade g . Este vector tem a direcção
vertical e é dirigida de cima para baixo.
a componente horizontal do movimento é um movimento rectilíneo
uniforme (m.r.u.).
a componente vertical do movimento é um movimento rectilíneo
uniformemente variado (m.r.u.v.).
1
ˆ
r = rx0 + v 0x ⋅ t i + ry0 + v 0y ⋅ t - ⋅ g ⋅ t 2 ˆj ( m )
2
(
)
(
)
v = v 0x ˆi + v 0y - g ⋅ t ˆj
( )
a = ( -g ) ˆj
( m/s )
2
m/s
( )
DABP@2006