XVIII Congresso Brasileiro de Automática / 12 a 16 Setembro 2010, Bonito-MS.
ESTIMADOR NEURAL DE VELOCIDADE PARA MOTORES DE INDUÇÃO TRIFÁSICOS
ALESSANDRO GOEDTEL∗, IVAN N. SILVA†, PAULO J. A. SERNI‡, CLAUDIONOR F. NASCIMENTO∗∗ , MARCELO
SUETAKE†, SERGIO A. O. DA SILVA∗
∗
Departamento de Eletrotécnica, UTFPR-CP
Av. Alberto Carazzai 1640, 86.300-000, Cornélio Procópio, PR, BRASIL
†
Departamento de Eng. Elétrica, EESC-USP
Av. Trabalhador São-carlense 400, 13.566-590, São Carlos, SP, BRASIL
‡
Departamento de Eng. Elétrica, UNESP-Bauru
Av. Eng. Luiz Edmundo Carrijo Coube 14-01, 17.033-360, Bauru, SP, BRASIL
∗∗
Centro de Engenharia, UFABC
Rua Santa Adélia 166,09.210-170, Santo André, SP, BRASIL
E-mails: [email protected], [email protected],
[email protected],[email protected],
[email protected], [email protected]
Abstract
This work presents an approach to estimate speed in induction motors based on artificial neural networks and using
measurement of primary variables like voltage and current. The use of induction motors is very common in many industrial sectors and plays an important role in the national energetic scene. The methodologies used in machine diagnoses, energy efficiency, start up and dimensioning of these motors are based on measures of the speed variable. However, the direct measure of
this variable compromises the control system and start up of the machine, reducing its robustness and increasing the implementation costs. Simulation results and experimental data are presented to validate the proposed approach.
Keywords
Induction motors, neural networks, speed estimator.
Resumo
Este trabalho apresenta uma estratégia para a estimativa de velocidade do motor de indução trifásico baseada em redes neurais artificiais utilizando medidas de variáveis primárias como tensão e corrente. O uso de motores de indução trifásicos
é uma constante em diversos setores industriais e de grande importância no cenário energético nacional. A maioria das metodologias de diagnóstico, monitoramento da eficiência energética, partida e especificação destes motores são fundamentadas na medida de velocidade no eixo. Entretanto, a medida da variável compromete o sistema de controle e acionamento da máquina, reduzindo sua robustez e aumentando o custo de implementação. Resultados de simulação e de ensaios experimentais para validação da proposta são também apresentados.
Palavras-chave
Motor de indução, redes neurais, estimador de velocidade.
1
Introdução
ruído, alteração da inércia da máquina, além de exigir
especial atenção em ambientes hostis (Vas, 1998).
Uma alternativa para se determinar a velocidade
de rotor dos motores é através do uso da técnica sensorless. Esta técnica é encontrada em aplicações de
alto desempenho como Controle Vetorial (CV) e
Controle Direto de Torque (CDT). Tal técnica pode
ser utilizada na identificação de falhas, monitoramento da eficiência energética, acionamento e dimensionamento de motores de indução trifásicos, pois substitui o uso do sensor de velocidade por estimadores.
No trabalho de Lu et al. (2009), foi descrito um
conjunto de técnicas de manutenção preventiva em
motores de indução trifásicos. A velocidade no eixo
dos motores foi estimada para determinar a eficiência
do conjunto motor-carga.
Em Trajin et al. (2009) é proposto um método
para identificar o desgaste de rolamentos através das
medidas das correntes do estator e a estimativa de
velocidade do eixo. No artigo de Sadeghian et al.
(2009) foi apresentado um método para determinar,
de forma online, a quebra das barras do rotor utilizando wavelet e Redes Neurais Artificiais (RNAs).
Os autores usam a medida da velocidade como variável de entrada para detectar a quebra de barras no
Os Motores de Indução Trifásicos (MITs) são usados
em muitos setores industriais, sendo o principal elemento para converter energia elétrica em mecânica
motriz. Suas principais características se fundamentam no baixo custo de manutenção e robustez.
As aplicações dos MITs podem ser divididas em
dois grandes grupos: no primeiro, o motor trabalha
sem controle de velocidade, ou seja, uma vez dada
sua partida, não há elemento de controle sobre o seu
regime de operação. No segundo, por sua vez, os
processos em que os motores estão acoplados necessitam da aplicação de uma metodologia de controle
seja ela escalar ou vetorial. Assim, a velocidade no
eixo do MIT é a variável fundamental em questões
relacionadas às diversas aplicações.
A velocidade nos eixos dos motores de indução
pode ser medida com encoders ópticos, resolvers
eletromagnéticos ou taco-geradores baseados em
motores de corrente contínua sem escovas. Entretanto, estes dispositivos eletromecânicos apresentam
algumas limitações em suas aplicações, tais como o
aumento do custo do dispositivo de acionamento,
redução da robustez mecânica, imunidade baixa ao
5052
XVIII Congresso Brasileiro de Automática / 12 a 16 Setembro 2010, Bonito-MS.
enrolamento de rotor. Em Rodriguez et al. (2008) os
autores apresentam metodologias que utilizam a variável escorregamento (s) para detectar problemas de
excentricidade no eixo do rotor, barras do rotor rompidas bem como falhas no enrolamento de estator.
O artigo de Bortoni (2009) descreve um conjunto de estratégias para análise do dimensionamento de
motores de indução trifásicos em regime permanente
e transitório. O autor utiliza as medidas de corrente e
velocidade para determinar a eficiência de cada conjunto motor-carga.
Artigos recentes têm usado as RNAs como ferramenta eficaz na estimativa de parâmetros e monitoramento de máquinas elétricas. O artigo de Vukadinovic et al. (2010) utiliza as RNAs para estimar a
resistência de estator aplicado ao controle por orientação de campo indireto. No trabalho de Ghate et al.
(2010) uma RNA Perceptron Multicamadas (PMC)
atua como um classificador de falhas em motores de
indução trifásicos.
A proposta deste artigo é apresentar uma metodologia alternativa para estimativa de velocidade do
motor de indução trifásico baseado em RNAs com
alimentação senoidal. São considerados os problemas
de qualidade de energia como sub-tensão e sobretensão simétrica numa grande faixa de operação do
conjugado de carga, no transitório e no regime permanente.
A organização deste trabalho segue a seguinte
ordem: Na Seção 2 serão apresentados os aspectos da
modelagem matemática do motor de indução. Na
Seção 3 serão descritos os princípios das RNAs. Na
Seção 4 os resultados de simulação e experimentais,
bem como a validação da estrutura proposta, serão
apresentados. Na Seção 5 as conclusões deste trabalho serão expostas.
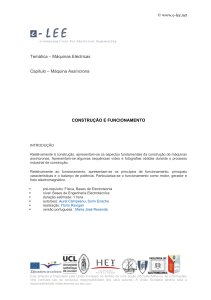
Figura 1. Corrente de Estator e Rotor do MIT.
As equações de tensão de linha do estator são dadas
por:
Vas = ias rs +
Vbs = ibs rs +
Vcs = ics rs +
dλas
dt
dλbs
dt
dλ cs
dt
(1)
(2)
(3)
onde:
Vas, Vbs, Vcs são as tensões trifásicas do estator,
em Volts.
ias, ibs, ics são as correntes trifásicas do estator,
em Ampères
λas, λbs, λcs são os fluxos magnéticos concatenados trifásicos do estator, em Webers.
rs é a resistência do estator, em Ohms.
Com relação ao rotor, as equações de tensão do
mesmo são descritas por:
dλar
Var = iar rr +
dt
Vbr = ibr r +
r
2 Aspectos da Modelagem do Motor de Indução
Trifásico
Vcr = icr rr +
dλbr
dt
dλcr
dt
(4)
(5)
(6)
onde:
Var, Vbr, Vcr são as tensões trifásicas do rotor, em
Volts.
iar, ibr, icr são as correntes trifásicas do rotor, em
Ampères.
λar, λbr, λcr são os fluxos magnéticos concatenados trifásicos do rotor em Webers.
rr é a resistência do rotor, em Ohms.
As equações de fluxo concatenado entre os enrolamentos de rotor e estator são representadas na forma matricial como se segue:
λ abc
Labc Labc i abc
s
ss
sr
s
= abc
(7)
abc . abc
L rs
L rr i r
λ abc
r
onde:
O primeiro passo envolvido no treinamento de uma
RNA é compilar o conjunto de padrões de entrada e
saída com o objetivo de ajustar os parâmetros internos da rede, ou seja, os pesos sinápticos. Este procedimento é conhecido como processo de treinamento e
se deve assegurar que a rede é exposta a sequências
de padrões que descrevam de forma satisfatória o
comportamento do sistema analisado (Goedtel,
2007).
Com o propósito de gerar os padrões de treinamento para a estimativa de velocidade do motor de
indução, quando em diferentes situações de carga e
tensão de alimentação, foram realizadas várias simulações utilizando a ferramenta Matlab/Simulink.
A modelagem matemática é iniciada pelas
equações de tensão do estator e do rotor. A Figura 1
representa o rotor e estator de um MIT, onde as
correntes de rotor e estator são apresentadas com
índices “r” e “s” respectivamente (Ong, 1997).
[
]
abc
λs = λ
λ
λ T
as bs cs
estator, em Webers.
5053
é o fluxo concatenado do
XVIII Congresso Brasileiro de Automática / 12 a 16 Setembro 2010, Bonito-MS.
[ ar
abc
λr = λ
λ
br
λ
cr
]T é o fluxo concatenado do
Park (qd0) e Clark (ab0) facilitam o cálculo da solução transitória, pois transformam as equações diferenciais variantes no tempo em equações de indutâncias constantes (Ong, 1997).
A transformação de coordenadas consiste em referenciar as variáveis do motor tais como tensão,
corrente e fluxo eletromagnético, descrito num sistema original, para outro sistema de coordenadas, o
qual será tomado como referência. A fundamentação
deste processo está baseada no princípio da similaridade eletromagnética. A possibilidade de reproduzir
o fluxo magnético no entreferro, bem como a distribuição de correntes no rotor e estator no sistema de
coordenadas adotado como referência, tem o mesmo
efeito do sistema de coordenadas original (Ong,
1997).
Valendo-se das equações acima é possível simular o comportamento elétrico e mecânico do motor de
indução trifásico. O objetivo do presente equacionamento é simular o comportamento do motor da partida ao regime permanente. Sendo este período extremamente curto não serão então consideradas variações térmicas as quais ficam submetidas à máquina.
Considera-se que o MIT é alimentado por um
sistema elétrico de potência trifásico equilibrado,
operando em 60Hz e sem distorções harmônicas. A
partida do motor simulará a partida direta com tensão
plena sendo aplicada aos enrolamentos de estator.
Os parâmetros utilizados na simulação foram levantados de um MIT de 4 pólos, 220/380V, IP55 do
fabricante WEG. A Tabela 1 apresenta os parâmetros
do motor utilizado.
rotor, em Webers.
[
]
abc
T é o vetor de corrente do esis = i
i
i
as bs cs
tator, em Ampères.
[
]
abc
T é o vetor de corrente do roir = i
i
i
ar br cr
tor, em Ampères.
As matrizes de indutância mútua e de indutância
própria são descritas pelas seguintes equações:
Lsm
Lsm
Lls + Lsm
abc
L ss = Lsm
Lls + Lsm
Lsm
(8)
L
L
L
+
L
sm
sm
ls
sm
(9)
Lrm
Lrm
L + Lrm
lr
L
rm
Lrm
abc
L rr =
Llr + Lrm
Lrm
Lrm
Llr + Lrm
T
2π
2π
cos(θr ) cos(θr + 3 ) cos(θr − 3 )
2π
2π
abc
Lrs = L cos(θr − )
cos(θr )
cos(θr + )
sr
3
3
cos(θ + 2π ) cos(θ − 2π ) cos(θ )
r
r
r
3
3
[ ]
abc
Labc
sr = L rs
T
(10)
(11)
onde:
Lls é a indutância de dispersão do estator (H).
Llr é a indutância de dispersão do rotor (H).
Lss é a indutância própria de estator (H).
Lrr é a indutância própria de rotor (H).
Lsm é a indutância mútua de estator (H).
Lrm é a indutância mútua de rotor (H).
Lsr é a indutância mútua entre rotor e estator (H).
Desconsiderando as perdas no ferro, é possível
expressar estas indutâncias em termos do número de
espiras dos enrolamentos de rotor e estator, e a permeância do entreferro. As relações entre as indutâncias são expressas pelas seguintes equações:
2
(12)
L =N P
ss
Tabela 1. Parâmetros do MIT.
Linha Standard – IV Pólos – 60Hz – 220/380V
Potência
1 cv
Resistência de Estator
7,32 Ω
Resistência de Rotor
2,78 Ω
Indutância de Dispersão do
8,95.10-3 H
Enrolamento de Estator
Indutância de Dispersão do
5,44.10-3 H
Enrolamento de Rotor
Indutância de Magnetização
1,41.10-1 H
Momento de Inércia do Rotor
2,71.10-3 kg.m2
Velocidade Síncrona
188,49 rad/s
Escorregamento Nominal
3,8%
Torque Nominal
4,1 Nm
s g
2π
2
Lsm = N s Pg cos
3
(13)
Lsr = N s Nr Pg
(14)
2
Lrr = N r Pg
(15)
onde:
Pg é a permeância magnética (Wb/A).
Ns e Nr são o número de espiras no enrolamento
do rotor e estator, respectivamente.
Uma máquina idealizada é descrita por seis equações diferenciais de primeira ordem, uma para
cada enrolamento. Estas equações são acopladas devido às indutâncias mútuas entre os enrolamentos.
Em particular, os termos de acoplamento entre rotor e
estator são função da posição do rotor. À medida que
o rotor gira, estes termos de acoplamento variam com
o tempo. Transformações matemáticas como as de
3 Metodologia e Treinamento das RNAs
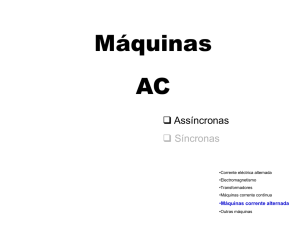
A metodologia para treinamento e validação da estrutura neural proposta neste trabalho é ilustrada no diagrama em blocos da Figura 2. Tal diagrama mostra
uma estrutura formada pelo modelo matemático estudado e com a estrutura experimental montada do
MIT. São apresentados ainda os passos numerados de
1 a 12.
Na Figura 2, a fase inicial consiste em modelar a
máquina de indução (passo 2), conforme descrito na
5054
XVIII Congresso Brasileiro de Automática / 12 a 16 Setembro 2010, Bonito-MS.
Seção 1. A simulação do modelo do MIT gera os
dados de treinamento e os dados de teste da estrutura
neural proposta (passos 4, 5 e 6). Em seguida, a RNA
é treinada (passo 7) com o algoritmo backpropagation descrito em Haykin (1999). A cada rede neural
artificial treinada são apresentados os dados de teste
(gerados no passo 4 e armazenados no passo 6). Desta forma, realiza-se o processo de validação da estrutura neural verificando-se o erro entre o valor real e o
valor estimado. Este processo é chamado de validação cruzada (crossvalidation) sendo descrito nos
passos 8 e 9.
m é o número de sinais de entrada do neurônio;
Xi é o i-ésimo sinal de entrada do neurônio;
wi é o peso associado com o i-ésimo sinal de entrada;
b é o limiar de cada neurônio;
vj(k) é a resposta do j-ésimo neurônio em k;
ϕj(.) é a função de ativação do j-ésimo neurônio;
yj(k) é o sinal de saída do j-ésimo neurônio em k.
MIT
Velocidade
Medida
Tensão
Corrente
RMS
RMS
Estimador Neural
Velocidade
Estimada
Erro
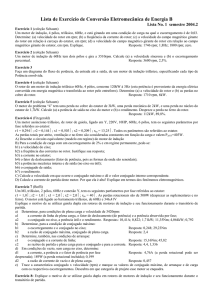
Figura 3. Estrutura de Estimativa da Velocidade do MIT Utilizando RNA.
Cada neurônio artificial, baseado nos sinais de
entrada, é capaz de computar a respectiva saída por
intermédio do ajuste de seus pesos. A função de ativação de cada neurônio da primeira camada escondida é a função tangente hiperbólica, enquanto a função
de ativação do neurônio de saída é a função identidade. O processo de ajuste dos pesos da rede (wj) associados ao j-ésimo neurônio de saída é feito pelo cálculo do sinal de erro ej(k) (entre a resposta desejada e
a resposta estimada) em relação à k-ésima iteração ou
k-ésimo vetor de entrada. Este sinal de erro é calculado da seguinte forma:
Figura 2. Diagrama em Blocos da Metodologia.
Em seguida, propõe-se o teste da estrutura neural, treinada e validada por dados de simulação, com
dados experimentais. Os dados são coletados na estrutura de ensaios de máquinas elétricas, conforme a
Figura 2 (passos 1 e 3). Os dados experimentais são
apresentados à rede neural artificial previamente treinada com dados de simulação e observa-se os resultados de generalização (passos 10, 11 e 12).
É importante ressaltar que o método proposto
neste trabalho considera um primeiro processo de
validação através de dados simulados e, em seguida,
com dados experimentais. Na literatura são encontrados processos de treinamento e validação cruzada
envolvendo máquinas elétricas com dados gerados
valendo-se de dados do modelo ou de dados experimentais do MIT.
Os dados de entrada da RNA PMC são formados
por valores eficazes (RMS) de tensão e corrente de
linha da alimentação do MIT. A saída da RNA é a
velocidade. A saída deste estimador neural é comparada com o valor desejado, gerando-se assim o sinal
de erro, conforme ilustrado na Figura 3.
O neurônio artificial pode ser modelado matematicamente como segue:
e j (k ) = d j (k ) − y j (k )
onde dj(k) é a resposta desejada do j-ésimo neurônio
de saída. Somando-se todos os erros quadráticos produzidos pelos neurônios de saída da rede em relação
à k-ésima iteração, tem-se:
E (k ) =
i =1
y j (k ) = ϕ j (v j (k ))
1 p 2
∑ e j (k )
2 j =1
(19)
onde p é número de neurônios da saída. Para uma
configuração de pesos ótima, E(k) é minimizado por
intermédio do ajuste dos pesos sinápticos wji. Os pesos associados à camada de saída da rede são recalculados usando-se a seguinte expressão:
w ji (k ) = w ji (k ) − η
∂E (k )
∂w ji (k )
(20)
O peso sináptico wji está conectando o j-ésimo
neurônio da camada considerada ao i-ésimo neurônio
da camada anterior, sendo η a constante que determina a taxa de aprendizado do algoritmo backpropagation. O ajuste dos pesos pertencentes às camadas
escondidas é feito de forma análoga. Os passos para
m
v j (k ) = ∑ X i .wi + b
(18)
(16)
(17)
onde:
5055
XVIII Congresso Brasileiro de Automática / 12 a 16 Setembro 2010, Bonito-MS.
o ajuste destes pesos são detalhados na bibliografia
consultada (Haykin, 1999).
Quadro de Comando
4 Resultados Simulados e Experimentais
Carga na Armadura
Torquímetro
Girante
Encoder Óptico
MIT
Nesta seção são apresentados dados de simulação e de experimentos para uma estrutura neural treinada com o objetivo de estimar a velocidade no eixo
do MIT. A Tabela 2 apresenta os diversos parâmetros
usados no treinamento da RNA proposta.
A Figura 4 mostra os resultados de generalização
da estrutura neural treinada e validada com dados de
simulação dentro de uma faixa de tensão (214-226
V). Neste caso, o MIT foi submetido a um conjugado
resistente de 3 Nm.
Gerador CC
Sensores Hall
Sistema de Aquisição
de Dados
Alimentação de Campo
do GCC
Figura 5. Estrutura de Ensaios.
A Figura 6 apresenta o resultado de generalização do MIT submetido a um conjugado de carga de
2,5 Nm em regime permanente. Na Figura 7 é apresentado o resultado de generalização da estrutura
neural proposta neste trabalho operando na faixa de
214 a 226 V com 4 Nm de carga no eixo.
Tabela 2. Parâmetros da RNA PMC.
Arquitetura da rede: Perceptron Multicamada
Tipo de treinamento: Supervisionado
Número de Camadas: 3
Neurônios da 1ª camada escondida : 5
Neurônios da 2ª camada escondida: 10
Algoritmo de treinamento: Levenberg-Marquardt
backpropagation
Taxa de Aprendizado: 1.10-3
Épocas de treinamento: 2000
Erro quadrático requerido: 1.10-3
Função de ativação das camadas intermediárias:
Tangente hiperbólica
Função de ativação da camada de saída: Linear
Estimativa de Velocidade: 214V - 226V
200
180
160
Velocidade (rad/s)
140
120
100
Velocidade (em regime: 183.2 rad/s)
Velocidade Estimada
80
60
40
20
0
-20
100
200
300
400
500
600
700
800
Amostras
Os dados coletados através da bancada de ensaios experimentais ilustrada na Figura 5 foram apresentados à estrutura neural treinada com dados de simulação, cujo processo fora denominado como bivalidação cruzada em Goedtel (2007). Entretanto, a
generalização não apresentou resultados satisfatórios,
pois os dados de simulação não apresentavam ruídos
e não linearidades encontrados nos dados reais.
Assim, um segundo passo de treinamento da
RNA utilizou 10 conjuntos de dados de treinamento,
sendo 8 conjuntos gerados a partir da modelagem do
MIT e 2 conjuntos medidos experimentalmente, cujo
processo é denominado bi-validação cruzada modificada (Goedtel, 2007).
Figura 6. Estimativa de Velocidade na Faixa de 214-226 V e
2,5 Nm de Conjugado de Carga.
Estimativa de Velocidade: 214V - 226V
200
180
160
Velocidade (rad/s)
140
120
100
80
60
Velocidade (em regime: 182.8 rad/s)
Velocidade Estimada
40
20
0
-20
100
200
300
400
500
600
700
800
Amostras
Figura 7. Estimativa de Velocidade na Faixa de 214-226 V e
4 Nm de Conjugado de Carga.
Estimativa de Velocidade: 200V - 206V
250
Velocidade (rad/s)
200
Algumas situações de análises, tais como acompanhamento da eficiência energética e predição de
falhas, exigem o monitoramento apenas da velocidade em regime permanente. Assim, dentro da proposta
deste trabalho, é apresentado um segundo estimador
de velocidade baseado em RNA com menor custo
computacional que o método proposto em Goedtel
(2007) o qual foca a operação em regime permanente e transitório do MIT.
150
100
Velocidade (em regime: 178,6 rad/s)
Velocidade Estimada
50
0
10
20
30
40
50
60
70
80
90
100
Amostras
Figura 4. Estimativa de Velocidade na Faixa de 214-226 V e
3 Nm de Conjugado de Carga em Regime Permanente.
5056
XVIII Congresso Brasileiro de Automática / 12 a 16 Setembro 2010, Bonito-MS.
consideradas as variações de parâmetros internos da
máquina, tais como resistência do rotor e estator com
a elevação da temperatura.
Os resultados de generalização são melhorados à
medida que a estrutura neural mapeia as características da dinâmica do sistema através do método de bivalidação cruzada modificada.
Os resultados de simulação de uma estrutura
neural com 5 neurônios na primeira camada escondida e 1 neurônio na camada de saída são apresentados
na Figura 8. Os demais parâmetros da RNA são idênticos aos apresentados na Tabela 2. O erro médio de
generalização para os dados gerados através de simulação foi de 0,8%.
Agradecimentos
Os autores agradecem o suporte do CNPq
(474290/2008-5) e Fundação Araucária (06/560933).
Referências Bibliográficas
Bortoni, E. C. (2009). Are my motors oversized?,
Energy Conversion and Management, Vol. L,
pp. 2282-2287.
Ghate, V. N. e Dudul, S. V. (2010). Optimal MLP
neural network classifier for fault detection of
three phase induction motor, Expert Systems with
Applications, Vol. XXXVII 3468-3481.
Goedtel, A. (2007). Estimador neural de velocidade
para motores de indução trifásicos, Tese de
Doutorado, Escola de Engenharia de São Carlos
da Universidade de São Paulo (EESC-USP).
Haykin, S. (1999). Neural Networks, 2nd ed.,
Prentice Hall.
Lu, B., Durocher, D. B. e Stemper, P. (2009). Online
and nonintrusive continuous motor energy and
condition monitoring in process industries, IEEE
Industry Applications Magazine, Vol. Nov/Dec,
pp. 52-60.
Ong, C. M. (1997). Dynamic Simulation of Electric
Machinery Using Matlab/Simulink, Prentice
Hall.
Rodriguez, P. V. J., Negrea, M. e Arkkio, A. (2008).
A simplified scheme for induction motor
condition monitoring, Mechanical Systems and
Signal Processing, Vol. XXII, pp. 1216-1236.
Sadeghian, A., Ye, Z. and Wu, B. (2009). Online
detection of broken rotor bars in induction
motors by wavelet packet decomposition and
artificial neural networks, IEEE Transactions on
Instrumentation and Measurement, Vol. LVIII,
pp. 2253-2263.
Trajin, B., Regnier, J. e Faucher, J. (2009).
Comparison between stator current and
estimated mechanical speed for detection of
bearing wear in asynchronous drives, IEEE
Transactions on Industrial Electronics, Vol.
LVI, pp. 4700-4709.
Vas, P. (1998). Sensorless Vector and Direct Torque
Control, Oxford University Press.
Vukandinovic, D., Basic, M. e Kulisic, L. (2010).
Stator resistance identification based on neural
and fuzzy logic principles in induction motor
drive, Neurocomputing, Vol. LXXIII, pp. 602612.
Figura 8. Estimativa de Velocidade na Faixa de 214-226 V.
Os ensaios utilizaram a faixa de tensão de 214226 V trifásica e equilibrada com o conjugado de
carga variando de 1 a 6 Nm para cada valor de tensão
ajustado. Os resultados da estimativa de velocidade
em regime permanente são apresentados na Figura 9.
O erro médio entre estimativa e o valor medido foi de
0,93% para uma ampla faixa de tensão e conjugado
de carga. No tempo de operação da máquina fica
implícita a variação paramétrica, em especial das
resistências, em função da temperatura e a conseqüente capacidade de generalizar soluções.
Estimativa de Velocidade: 214-226V
200
180
160
Velocidade Medida
Velocidade Estimada
Erro Relativo (*10)
Amplitude (rad/s)
140
120
100
80
60
40
20
0
200
400
600
800
1000
1200
1400
Tempo (amostras)
Figura 9. Estimativa de Velocidade na Faixa de 214-226 V.
5 Conclusão
Neste artigo foi proposto um estimador de velocidade para o motor de indução trifásico baseado em
redes neurais artificiais em regime permanente e transitório, considerando uma faixa de tensão (216224 V) numa ampla faixa de conjugado de carga aplicada (1-6 Nm)
A simplicidade computacional e a robustez frente à variação de parâmetros de alimentação e alteração de carga no eixo são questões de grande relevância na estimativa de velocidade. Além disso, foram
5057